
経路案内装置
【課題】歩行の自由度が高い通路については歩行者の感覚に合わせた案内情報を生成して案内する経路案内装置を提供する。
【解決手段】本発明の経路案内装置は、通路をリンクおよびノードで表現したネットワーク上に現在位置をマップマッチングするとともに、ネットワーク上に予め定められたルートの進行方向をリンクの形状を参照して案内する経路案内装置1であって、ネットワーク上にある被案内者の進行方向の視界の良否を記憶する視界データ記憶部19と、ルート上の区間であって視界データ記憶部19に記憶されている進行方向の視界が良好である区間について、進行方向のリンクの変化より鈍化して案内する鈍化案内部14とを備える。
【解決手段】本発明の経路案内装置は、通路をリンクおよびノードで表現したネットワーク上に現在位置をマップマッチングするとともに、ネットワーク上に予め定められたルートの進行方向をリンクの形状を参照して案内する経路案内装置1であって、ネットワーク上にある被案内者の進行方向の視界の良否を記憶する視界データ記憶部19と、ルート上の区間であって視界データ記憶部19に記憶されている進行方向の視界が良好である区間について、進行方向のリンクの変化より鈍化して案内する鈍化案内部14とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションシステムに用いる経路案内装置に関するものである。
【背景技術】
【0002】
従来から、携帯して持ち運ぶことが可能な、例えばPND(Personal Navigation Device)等の歩行者用ナビゲーションシステムが利用されている。
従来の歩行者用ナビゲーションシステムとしては、例えば、歩行者用の通路を表現するリンクおよびノードのデータを含むネットワークデータを用いて出発地から目的地に到るまでの推奨する経路を設定し、設定した経路に基づく地図画像を画面に表示して案内を行なうナビゲーション機能を有するものが広く用いられている。また、予め監視ゾーンおよびこの監視ゾーンに対する進行角度範囲毎に案内情報を用意してテーブルに記憶しておき、現在位置と進行方向を取得し、現在位置が監視ゾーンにある場合に、進行方向に対応する案内情報を出力するナビゲーションシステムも知られている(例えば、特許文献1を参照。)。特許文献1に記載のナビゲーションシステムによれば、監視ゾーンごとに案内情報を用意しておくことにより、車に比べて進行方向に関する制約が少ない歩行者用の通路を適切に案内することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4127774号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載のナビゲーションシステムは、監視ゾーンごとに案内情報を生成しておく必要があり、データ生成の処理にコストが必要となってしまう。また、歩行者は車に比べて進行方向に関する制約が少ないので、状況によっては生成する案内情報が多くなってしまうおそれがある。
【0005】
本発明は、歩行の自由度が高い通路については歩行者の感覚に合わせた案内情報を生成して案内する経路案内装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の経路案内装置は、通路をリンクおよびノードで表現したネットワーク上に現在位置をマップマッチングするとともに、前記ネットワーク上に予め定められたルートの進行方向を前記リンクの形状を参照して案内する経路案内装置であって、前記ネットワーク上にある被案内者の前記進行方向の視界の良否を記憶する視界データ記憶部と、前記ルート上の区間であって前記視界データ記憶部に記憶されている進行方向の視界が良好である区間について、前記進行方向のリンクの変化より鈍化して案内する鈍化案内部とを備えることを特徴とする。
【0007】
なお、上述した特徴は、本発明の特徴のすべてを列挙したものではなく、これらを要部とする構成(または方法)もまた発明となり得る。
【発明の効果】
【0008】
本発明の経路案内装置によれば、ネットワーク上に予め定められたルートの進行方向をリンクの形状を参照して案内するものであり、進行方向の視界が良好である区間について進行方向のリンクの変化より鈍化して案内することにより、歩行者にとってネットワークで表現する細かな経路を意識しないで経路を案内することができる。
【図面の簡単な説明】
【0009】
【図1】本実施形態のナビゲーションシステムの構成を示す図である。
【図2】本実施形態の概略のフローチャートである。
【図3】本実施形態の経路設定処理のフローチャートである。
【図4】本実施形態の経路案内処理のフローチャートである。
【図5】本実施形態の経路設定の一例を示す図である。
【図6】本実施形態の経路案内の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明を具体化した実施形態を説明する。
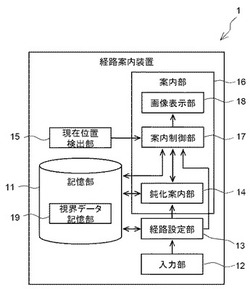
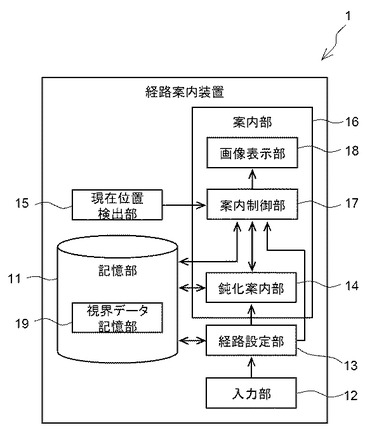
図1に示すように、経路案内装置1は、装置本体(図示せず)の内部に、記憶部11、入力部12、経路設定部13、現在位置検出部15および案内部16を備えるPNDであり、歩行者用ナビゲーション端末として利用される。また、記憶部11は視界データ記憶部を備え、案内部16は鈍化案内部14、案内制御部17および画像表示部18を備える。
【0011】
記憶部11は、フラッシュメモリ、ハードディスク、DVDまたはブルーレイディスク等の外部記憶装置であり、地図データを記憶している。画像表示部18は、LCD(Liquid Crystal Display)等であって画像表示面に画像を表示するデバイスである。入力部12は、表示部の画像表示面に備えられたタッチパネルである。現在位置検出部15は、GPS受信器であり、受信したGPS衛星からの電波に基づいて経路案内装置1の装置本体の現在位置を検出して現在位置情報を所定の時間間隔で案内制御部17へ出力する位置検出センサである。経路設定部13、鈍化案内部14および案内制御部17は、コンピュータプログラムや処理条件等が予め記憶されているROMやRAM等の内部記憶装置、およびこのコンピュータプログラムを実行するCPU等を備えた小型のコンピュータである。装置本体は、これら各部を収納する樹脂性の筐体である。
【0012】
記憶部11が記憶している地図データは、歩行者用の通路の接続状態をノードおよびリンクで表現したネットワークを演算処理に利用するためのネットワークデータと、行政界図、道路図および家形図等を生成するためのポリラインやポリゴンのデータ等の地図を描画するための描画用データとを含む地図データである。
【0013】
また、ネットワークデータは、通路の端点および通路同士を接続する点をノードとして規定し、2つのノード同士を結ぶ線をリンクとして規定することにより、これらノードおよびリンクの接続関係を規定している。ノードの情報には、ノードの座標の情報、接続しているリンクの情報、リンクを介して接続する他のノードの情報などが含まれている。リンクの情報には、リンクのID情報、両端のノードのID情報、リンク長の情報、通路の形状を現実に近いように表現するための形状補間点の座標の情報などが含まれている。
【0014】
また、記憶部11は、ネットワーク上にある被案内者の進行方向の視界の良否を記憶する視界データ記憶部19を備えている。具体的には、視界データ記憶部19は、ネットワークと同一座標上であって、ルート案内中である被案内者の視界を遮蔽する高さの建造物が存在しない区間を進行方向の視界が良好である区間(以下、視界良好区間という)として記憶している。本実施形態においては、上述した視界良好区間については後述する案内制御部17によって抽出され、視界データ記憶部19に記憶されるものである。なお、本実施形態においては、50inchを閾値とし、被案内者の視界を遮蔽する高さの建造物はこの閾値以上のものとしている。例えば、通路の横に設置している椅子やゴミ箱等は一般成人にとっては、経路を妨げる建造物とは認識されることがないと考えられるので、このような事例を鑑み、50inchと定めた。本実施形態においては、記憶部11は、描画用データのポリラインやポリゴンの属性情報として閾値以上であるか否かを示す視界遮蔽指標を記憶しており、案内制御部17はこの視界遮蔽指標を参照して視界良好区間を抽出する。案内制御部17の処理の詳細は後述する。
【0015】
経路設定部13は、入力部12を用いたユーザの操作により指定された位置情報または現在位置検出部15が検出した現在位置情報に基づいて、記憶部11に記憶されている地図データを参照し出発地または目的地のそれぞれに対応する地図上の指定点を決定するとともに、ネットワークデータを用いて出発地から目的地に到る経路を算出して最適な推奨ルートを設定する機能を有する。
【0016】
案内部16は、案内情報を生成して案内する機能を有する。本実施形態において、案内部16は、鈍化案内部14、案内制御部17および画像表示部18により構成される。
【0017】
案内制御部17は、現在位置検出部15が検出した現在位置情報に基づいて、ネットワークデータに含まれるリンクのうち適切なリンク上に現在位置をマップマッチングし、マップマッチングした位置を含むように特定した特定範囲の地図画像を生成するとともに、ネットワーク上に予め定められた推奨ルートの進行方向をリンクの形状を参照して案内する誘導線を地図画像に重ねて生成した案内画像を画像表示部18へ出力する。本実施形態においては、マップマッチングした位置が生成した案内画像の中心に位置するようにしており、案内情報が歩行者の位置に対応するものとなっている。
【0018】
なお、現在位置を含む視界良好区間については、鈍化案内部14から入力された鈍化して案内するための誘導線を採用する。このため、案内制御部17は、ネットワーク上に予め定められた推奨ルートにおいて、被案内者の進行方向の視界に被案内者の視界を遮蔽する高さの建造物が存在しない区間を抽出し、抽出した区間を進行方向の視界が良好である視界良好区間として視界データ記憶部19に記憶させる機能を有している。具体的には、案内制御部17は、描画データを参照し、出発地から目的地までの間に仮想の現在位置を順次設定し、仮想の現在位置から進行方向に連続する区間における視界良好区間を抽出する。こうすることで、推奨ルート上のすべての視界良好区間を予め抽出しておくことができる。そして、案内制御部17は、経路案内中、現在位置情報が入力されるたびに、入力した現在位置情報を鈍化案内部14へ出力する。
【0019】
画像表示部18は、案内制御部17が出力した案内画像を画像表示面に表示する。
【0020】
鈍化案内部14は、推奨ルート上の区間であって視界データ記憶部19に記憶されている視界良好区間について、進行方向のリンクの変化より鈍化して案内する機能を有する。具体的には、鈍化案内部14は、現在位置を含む視界良好区間を抽出し、抽出した視界良好区間のリンクの形状においてリンクを表現する線に屈折部が形成されている部分を直線に近づけた誘導線を生成する処理を実行する。また、曲線部については、曲率を小さくした誘導線を生成する処理を実行する。鈍化案内部14は、生成した視界良好区間の誘導線の情報を案内制御部17に出力する。
【0021】
本実施形態の経路案内装置によれば、ネットワーク上に予め定められたルートの進行方向を前記リンクの形状を参照して案内するものであり、進行方向の視界が良好である区間については、前記進行方向のリンクの変化より鈍化して案内することにより、歩行者にとってネットワークで表現する細かな経路を意識しないで経路を案内することができる。
【0022】
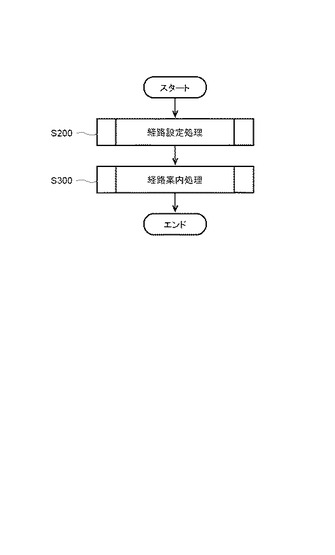
本実施形態の経路案内装置1の処理について説明する。本実施形態の経路案内装置1は、図2に示すように、経路設定部13により経路設定処理S200を実行して推奨ルートを設定し、推奨ルートに基づいて鈍化案内部14により案内情報を生成しながら案内部16により案内画像を表示して案内する経路案内処理S300を実行する。
【0023】
<経路設定処理>
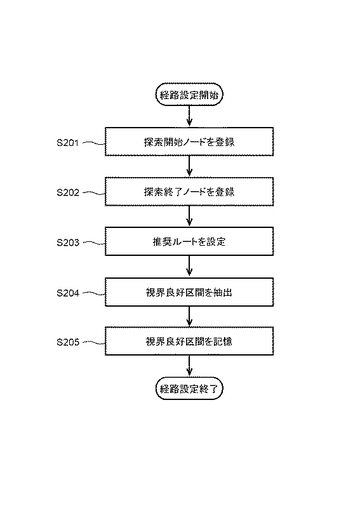
図3を用いて経路設定処理S200について説明する。まず、経路案内装置1は、記憶部11に記憶されている地図データを参照し、現在位置検出部15が検出した現在位置情報に基づいて特定のノードを出発地に対応する探索開始ノードとして決定し登録する処理を経路設定部13の処理として実行する(ステップS201)。ステップS201が終了すると、経路案内装置1は、記憶部11に記憶されている地図データを参照し、ユーザの操作による入力部12への入力によって指定された目的地に対応する探索終了ノードを登録する処理を経路設定部13の処理として実行する(ステップS202)。
【0024】
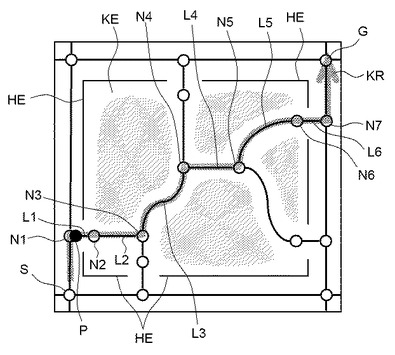
ステップS202が終了すると、経路案内装置1は、これら登録した探索開始ノードから探索終了ノードへ至る通過コストが最も低くなるノードの列を、記憶部に記憶されているネットワークデータを参照してダイクストラ法を用いて算出し、算出したノードの列に含まれるノード間を接続するリンクからなる最適な推奨ルートを設定する処理を経路設定部13の処理として実行する(ステップS203)。図5に示す経路設定の一例においては、出発地に対応する探索開始ノードSからノードN1〜N7を経由して目的地に対応する探索終了ノードGへ到る推奨ルートKRが設定されている。推奨ルートが設定されると、設定した推奨ルートは経路設定部13から鈍化案内部14および案内制御部17へと出力される。
【0025】
ステップS203が終了すると、経路案内装置1は、推奨ルートにおいて、被案内者の進行方向の視界に被案内者の視界を遮蔽する高さの建造物が存在しない区間を抽出する処理を案内制御部17の処理として実行する(ステップS204)。図5に示す例において、塀HEで周囲を囲まれている公園KE内は、芝生以外の通行可能な領域が定められており、複数のノードおよびリンクからなる歩行者用のネットワークが構成されている。図5に示す例においては、推奨ルートに含まれるリンクのうち、リンクL1〜L6についてはこの区間を通行している被案内者の進行方向の視界に視界遮蔽指標が閾値以上であるポリラインやポリゴンが存在しないので、この区間は視界良好区間として抽出される。ステップS204が終了すると、経路案内装置1は、抽出した区間を視界良好区間として視界データ記憶部19に記憶させる処理を案内制御部17の処理として実行する(ステップS205)
【0026】
<経路案内処理>
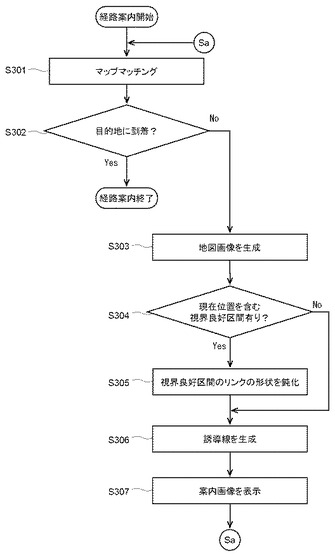
図4を用いて経路案内処理S300について説明する。経路案内装置1は、所定の時間間隔で案内制御部17に入力される現在位置情報に基づいて、ネットワークデータに含まれるリンクのうち適切なリンク上に現在位置をマップマッチングする処理を案内制御部17の処理として実行する(ステップS301)。ステップS301が終了すると、経路案内装置1は、マップマッチングした位置が目的地であるか否かを判定する処理を案内制御部17の処理として実行する(ステップS302)。経路案内装置1は、ステップS302において、マップマッチングした位置が目的地であると判定した場合は(ステップS302:Yes)、経路案内処理S300を終了する。
【0027】
経路案内装置1は、ステップS302において、マップマッチングした位置が目的地ではないと判定した場合は(ステップS302:No)、描画用データを参照してマップマッチングした位置が含まれるように特定した特定範囲の地図画像を生成するとともに、現在位置情報を鈍化案内部14へ出力する処理を案内制御部17の処理として実行する(ステップS303)。
【0028】
ステップS303が終了すると、経路案内装置1は、現在位置を含む視界良好区間が視界データ記憶部19に記憶されているか否かを判定する処理を鈍化案内部14の処理として実行する(ステップS304)。
【0029】
経路案内装置1は、ステップS304において、現在位置を含む視界良好区間が視界データ記憶部19に記憶されていないと判定した場合は(ステップS304:No)、後述するステップS306へ移行する。また、経路案内装置1は、ステップS304において、現在位置を含む視界良好区間が視界データ記憶部19に記憶されていると判定した場合は(ステップS304:Yes)、推奨ルート上の区間であって視界データ記憶部19に記憶されている視界良好区間について、進行方向のリンクの変化より鈍化して案内するための誘導線を生成し、生成した誘導線を案内制御部17へ出力する処理を鈍化案内部14の処理として実行する(ステップS305)。本実施形態では、リンクの形状の参照処理を積分処理する方法として、リンク形状鈍化対象リンク列がなす形状について、角度を形成している部分にフィレット処理を施してなめらかな線形状に修正する方法を用いる。
【0030】
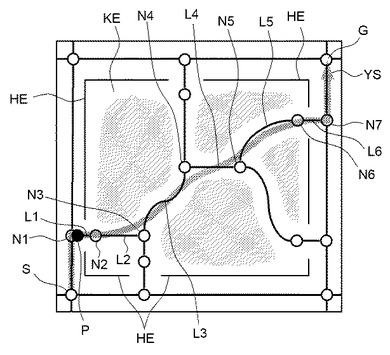
ステップS305が終了すると、経路案内装置1は、鈍化案内部14から案内制御部17へ出力された誘導線に対応する視界良好区間以外のリンクについてリンクの形状をそのまま反映させた案内情報としての誘導線を生成し、特定範囲内の誘導線を完成する処理を案内制御部17の処理として実行する(ステップS306)。図5における現在位置の地点PはノードN1を通過した直後の位置に存在している。経路案内装置1は、現在位置である地点Pは、視界良好区間であるリンクL1〜L6に含まれている。このため、図5に示す経路設定の一例に示す推奨ルートKRは、現在位置が地点Pのとき、図6に示すように、リンクL1〜L6が全体としてなす形状について、屈折部および曲線部を形成している部分を緩やかに修正した誘導線YSが生成される。図5に示すリンクL7については、現在位置の地点Pとの間に視界遮蔽指標が予め設定した閾値以上となっている公園周囲の塀HEのポリラインが存在しているので視界データ記憶部19に記憶されていない。ステップS306が終了すると、経路案内装置1は、誘導線を先に生成しておいた地図画像に重ねて生成した案内画像を画像表示部18へ出力する処理を案内制御部17の処理として実行し、画像表示部18において、案内制御部17から入力した案内画像を画像表示面に表示する(ステップS307)。ステップS307が終了すると、経路案内装置1は、ステップS301へ移行し、マップマッチングした位置が目的地であると判定するまで経路案内処理S300を繰り返す。
【0031】
<その他の例>
なお、本発明は上述の実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変更、改良が可能である。例えば、上述した実施形態においては、経路設定装置1はPNDであるが、車載専用ナビゲーション、携帯電話、GPS受信器付きパーソナルコンピュータにおいても利用することができる。
【0032】
また、上述した実施形態においては、経路設定装置1は、視界良好区間のリンクの形状を鈍化させる処理についてフィレット処理を行なっているが、リンクが連なる区間のリンク形状の状態によっては、例えば、ペジエ曲線を生成する処理を行なうようにしてもよい。
【0033】
また、上述した実施形態においては、経路設定装置1は、実際に存在する建造物の高さ情報に基づいて被案内者の視界を遮蔽する高さであるか否かを示す視界遮蔽指標を登録しているが、実際の状況を反映させることに限定されるものではない。たとえば、視界が開けている場合においても、交差点中央の車道部分にあたる、歩行者が自由に通行することが不可能である空間が含まれている場合には、車道など歩行不可能なエリアをポリゴン化したデータに視界遮蔽指標を登録しておくことで、その歩行可能なエリア内部でのみ鈍化した誘導線を生成するようにすることも可能である。
【0034】
また、上述した実施形態においては、経路設定装置1は、装置本体内に記憶部11、経路設定部13、鈍化案内部14および案内制御部17を備えたものとしているが、これらは装置本体内にあることに限定されるものではない。例えば、これら記憶部11、経路設定部13および鈍化案内部14を別途用意したデータセンター内に備える構成としてもよい。このような構成においては、装置本体とデータセンターとの間でデータの送受信を行うことになる。具体的には、まずは装置本体が現在位置情報をデータセンターへ送信し、データセンターは受信した現在位置情報に基づいて案内情報を生成して装置本体へ送信し、受信した案内情報を用いて装置本体が案内するという一連の処理が実行される。
【0035】
また、上述した実施形態においては、経路設定装置1は、現在位置を含む視界良好区間のみリンクの形状を鈍化して案内しているが、推奨ルート上のすべての視界良好区間についてリンクの形状を鈍化した誘導線を表示してもよい。
【0036】
また、上述した実施形態においては、経路設定装置1は、推奨ルートを設定した後に推奨ルートに含まれるすべての視界良好区間を抽出することとしているが、現在位置を更新するとき、または現在位置をマップマッチングしたリンクが更新するときに、現在位置を含む視界良好区間を抽出するようにしてもよい。
【符号の説明】
【0037】
1…経路設定装置
11…記憶部
13…経路設定部
14…鈍化案内部
15…現在位置検出部
16…案内部
19…視界データ記憶部
【技術分野】
【0001】
本発明は、ナビゲーションシステムに用いる経路案内装置に関するものである。
【背景技術】
【0002】
従来から、携帯して持ち運ぶことが可能な、例えばPND(Personal Navigation Device)等の歩行者用ナビゲーションシステムが利用されている。
従来の歩行者用ナビゲーションシステムとしては、例えば、歩行者用の通路を表現するリンクおよびノードのデータを含むネットワークデータを用いて出発地から目的地に到るまでの推奨する経路を設定し、設定した経路に基づく地図画像を画面に表示して案内を行なうナビゲーション機能を有するものが広く用いられている。また、予め監視ゾーンおよびこの監視ゾーンに対する進行角度範囲毎に案内情報を用意してテーブルに記憶しておき、現在位置と進行方向を取得し、現在位置が監視ゾーンにある場合に、進行方向に対応する案内情報を出力するナビゲーションシステムも知られている(例えば、特許文献1を参照。)。特許文献1に記載のナビゲーションシステムによれば、監視ゾーンごとに案内情報を用意しておくことにより、車に比べて進行方向に関する制約が少ない歩行者用の通路を適切に案内することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4127774号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載のナビゲーションシステムは、監視ゾーンごとに案内情報を生成しておく必要があり、データ生成の処理にコストが必要となってしまう。また、歩行者は車に比べて進行方向に関する制約が少ないので、状況によっては生成する案内情報が多くなってしまうおそれがある。
【0005】
本発明は、歩行の自由度が高い通路については歩行者の感覚に合わせた案内情報を生成して案内する経路案内装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の経路案内装置は、通路をリンクおよびノードで表現したネットワーク上に現在位置をマップマッチングするとともに、前記ネットワーク上に予め定められたルートの進行方向を前記リンクの形状を参照して案内する経路案内装置であって、前記ネットワーク上にある被案内者の前記進行方向の視界の良否を記憶する視界データ記憶部と、前記ルート上の区間であって前記視界データ記憶部に記憶されている進行方向の視界が良好である区間について、前記進行方向のリンクの変化より鈍化して案内する鈍化案内部とを備えることを特徴とする。
【0007】
なお、上述した特徴は、本発明の特徴のすべてを列挙したものではなく、これらを要部とする構成(または方法)もまた発明となり得る。
【発明の効果】
【0008】
本発明の経路案内装置によれば、ネットワーク上に予め定められたルートの進行方向をリンクの形状を参照して案内するものであり、進行方向の視界が良好である区間について進行方向のリンクの変化より鈍化して案内することにより、歩行者にとってネットワークで表現する細かな経路を意識しないで経路を案内することができる。
【図面の簡単な説明】
【0009】
【図1】本実施形態のナビゲーションシステムの構成を示す図である。
【図2】本実施形態の概略のフローチャートである。
【図3】本実施形態の経路設定処理のフローチャートである。
【図4】本実施形態の経路案内処理のフローチャートである。
【図5】本実施形態の経路設定の一例を示す図である。
【図6】本実施形態の経路案内の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明を具体化した実施形態を説明する。
図1に示すように、経路案内装置1は、装置本体(図示せず)の内部に、記憶部11、入力部12、経路設定部13、現在位置検出部15および案内部16を備えるPNDであり、歩行者用ナビゲーション端末として利用される。また、記憶部11は視界データ記憶部を備え、案内部16は鈍化案内部14、案内制御部17および画像表示部18を備える。
【0011】
記憶部11は、フラッシュメモリ、ハードディスク、DVDまたはブルーレイディスク等の外部記憶装置であり、地図データを記憶している。画像表示部18は、LCD(Liquid Crystal Display)等であって画像表示面に画像を表示するデバイスである。入力部12は、表示部の画像表示面に備えられたタッチパネルである。現在位置検出部15は、GPS受信器であり、受信したGPS衛星からの電波に基づいて経路案内装置1の装置本体の現在位置を検出して現在位置情報を所定の時間間隔で案内制御部17へ出力する位置検出センサである。経路設定部13、鈍化案内部14および案内制御部17は、コンピュータプログラムや処理条件等が予め記憶されているROMやRAM等の内部記憶装置、およびこのコンピュータプログラムを実行するCPU等を備えた小型のコンピュータである。装置本体は、これら各部を収納する樹脂性の筐体である。
【0012】
記憶部11が記憶している地図データは、歩行者用の通路の接続状態をノードおよびリンクで表現したネットワークを演算処理に利用するためのネットワークデータと、行政界図、道路図および家形図等を生成するためのポリラインやポリゴンのデータ等の地図を描画するための描画用データとを含む地図データである。
【0013】
また、ネットワークデータは、通路の端点および通路同士を接続する点をノードとして規定し、2つのノード同士を結ぶ線をリンクとして規定することにより、これらノードおよびリンクの接続関係を規定している。ノードの情報には、ノードの座標の情報、接続しているリンクの情報、リンクを介して接続する他のノードの情報などが含まれている。リンクの情報には、リンクのID情報、両端のノードのID情報、リンク長の情報、通路の形状を現実に近いように表現するための形状補間点の座標の情報などが含まれている。
【0014】
また、記憶部11は、ネットワーク上にある被案内者の進行方向の視界の良否を記憶する視界データ記憶部19を備えている。具体的には、視界データ記憶部19は、ネットワークと同一座標上であって、ルート案内中である被案内者の視界を遮蔽する高さの建造物が存在しない区間を進行方向の視界が良好である区間(以下、視界良好区間という)として記憶している。本実施形態においては、上述した視界良好区間については後述する案内制御部17によって抽出され、視界データ記憶部19に記憶されるものである。なお、本実施形態においては、50inchを閾値とし、被案内者の視界を遮蔽する高さの建造物はこの閾値以上のものとしている。例えば、通路の横に設置している椅子やゴミ箱等は一般成人にとっては、経路を妨げる建造物とは認識されることがないと考えられるので、このような事例を鑑み、50inchと定めた。本実施形態においては、記憶部11は、描画用データのポリラインやポリゴンの属性情報として閾値以上であるか否かを示す視界遮蔽指標を記憶しており、案内制御部17はこの視界遮蔽指標を参照して視界良好区間を抽出する。案内制御部17の処理の詳細は後述する。
【0015】
経路設定部13は、入力部12を用いたユーザの操作により指定された位置情報または現在位置検出部15が検出した現在位置情報に基づいて、記憶部11に記憶されている地図データを参照し出発地または目的地のそれぞれに対応する地図上の指定点を決定するとともに、ネットワークデータを用いて出発地から目的地に到る経路を算出して最適な推奨ルートを設定する機能を有する。
【0016】
案内部16は、案内情報を生成して案内する機能を有する。本実施形態において、案内部16は、鈍化案内部14、案内制御部17および画像表示部18により構成される。
【0017】
案内制御部17は、現在位置検出部15が検出した現在位置情報に基づいて、ネットワークデータに含まれるリンクのうち適切なリンク上に現在位置をマップマッチングし、マップマッチングした位置を含むように特定した特定範囲の地図画像を生成するとともに、ネットワーク上に予め定められた推奨ルートの進行方向をリンクの形状を参照して案内する誘導線を地図画像に重ねて生成した案内画像を画像表示部18へ出力する。本実施形態においては、マップマッチングした位置が生成した案内画像の中心に位置するようにしており、案内情報が歩行者の位置に対応するものとなっている。
【0018】
なお、現在位置を含む視界良好区間については、鈍化案内部14から入力された鈍化して案内するための誘導線を採用する。このため、案内制御部17は、ネットワーク上に予め定められた推奨ルートにおいて、被案内者の進行方向の視界に被案内者の視界を遮蔽する高さの建造物が存在しない区間を抽出し、抽出した区間を進行方向の視界が良好である視界良好区間として視界データ記憶部19に記憶させる機能を有している。具体的には、案内制御部17は、描画データを参照し、出発地から目的地までの間に仮想の現在位置を順次設定し、仮想の現在位置から進行方向に連続する区間における視界良好区間を抽出する。こうすることで、推奨ルート上のすべての視界良好区間を予め抽出しておくことができる。そして、案内制御部17は、経路案内中、現在位置情報が入力されるたびに、入力した現在位置情報を鈍化案内部14へ出力する。
【0019】
画像表示部18は、案内制御部17が出力した案内画像を画像表示面に表示する。
【0020】
鈍化案内部14は、推奨ルート上の区間であって視界データ記憶部19に記憶されている視界良好区間について、進行方向のリンクの変化より鈍化して案内する機能を有する。具体的には、鈍化案内部14は、現在位置を含む視界良好区間を抽出し、抽出した視界良好区間のリンクの形状においてリンクを表現する線に屈折部が形成されている部分を直線に近づけた誘導線を生成する処理を実行する。また、曲線部については、曲率を小さくした誘導線を生成する処理を実行する。鈍化案内部14は、生成した視界良好区間の誘導線の情報を案内制御部17に出力する。
【0021】
本実施形態の経路案内装置によれば、ネットワーク上に予め定められたルートの進行方向を前記リンクの形状を参照して案内するものであり、進行方向の視界が良好である区間については、前記進行方向のリンクの変化より鈍化して案内することにより、歩行者にとってネットワークで表現する細かな経路を意識しないで経路を案内することができる。
【0022】
本実施形態の経路案内装置1の処理について説明する。本実施形態の経路案内装置1は、図2に示すように、経路設定部13により経路設定処理S200を実行して推奨ルートを設定し、推奨ルートに基づいて鈍化案内部14により案内情報を生成しながら案内部16により案内画像を表示して案内する経路案内処理S300を実行する。
【0023】
<経路設定処理>
図3を用いて経路設定処理S200について説明する。まず、経路案内装置1は、記憶部11に記憶されている地図データを参照し、現在位置検出部15が検出した現在位置情報に基づいて特定のノードを出発地に対応する探索開始ノードとして決定し登録する処理を経路設定部13の処理として実行する(ステップS201)。ステップS201が終了すると、経路案内装置1は、記憶部11に記憶されている地図データを参照し、ユーザの操作による入力部12への入力によって指定された目的地に対応する探索終了ノードを登録する処理を経路設定部13の処理として実行する(ステップS202)。
【0024】
ステップS202が終了すると、経路案内装置1は、これら登録した探索開始ノードから探索終了ノードへ至る通過コストが最も低くなるノードの列を、記憶部に記憶されているネットワークデータを参照してダイクストラ法を用いて算出し、算出したノードの列に含まれるノード間を接続するリンクからなる最適な推奨ルートを設定する処理を経路設定部13の処理として実行する(ステップS203)。図5に示す経路設定の一例においては、出発地に対応する探索開始ノードSからノードN1〜N7を経由して目的地に対応する探索終了ノードGへ到る推奨ルートKRが設定されている。推奨ルートが設定されると、設定した推奨ルートは経路設定部13から鈍化案内部14および案内制御部17へと出力される。
【0025】
ステップS203が終了すると、経路案内装置1は、推奨ルートにおいて、被案内者の進行方向の視界に被案内者の視界を遮蔽する高さの建造物が存在しない区間を抽出する処理を案内制御部17の処理として実行する(ステップS204)。図5に示す例において、塀HEで周囲を囲まれている公園KE内は、芝生以外の通行可能な領域が定められており、複数のノードおよびリンクからなる歩行者用のネットワークが構成されている。図5に示す例においては、推奨ルートに含まれるリンクのうち、リンクL1〜L6についてはこの区間を通行している被案内者の進行方向の視界に視界遮蔽指標が閾値以上であるポリラインやポリゴンが存在しないので、この区間は視界良好区間として抽出される。ステップS204が終了すると、経路案内装置1は、抽出した区間を視界良好区間として視界データ記憶部19に記憶させる処理を案内制御部17の処理として実行する(ステップS205)
【0026】
<経路案内処理>
図4を用いて経路案内処理S300について説明する。経路案内装置1は、所定の時間間隔で案内制御部17に入力される現在位置情報に基づいて、ネットワークデータに含まれるリンクのうち適切なリンク上に現在位置をマップマッチングする処理を案内制御部17の処理として実行する(ステップS301)。ステップS301が終了すると、経路案内装置1は、マップマッチングした位置が目的地であるか否かを判定する処理を案内制御部17の処理として実行する(ステップS302)。経路案内装置1は、ステップS302において、マップマッチングした位置が目的地であると判定した場合は(ステップS302:Yes)、経路案内処理S300を終了する。
【0027】
経路案内装置1は、ステップS302において、マップマッチングした位置が目的地ではないと判定した場合は(ステップS302:No)、描画用データを参照してマップマッチングした位置が含まれるように特定した特定範囲の地図画像を生成するとともに、現在位置情報を鈍化案内部14へ出力する処理を案内制御部17の処理として実行する(ステップS303)。
【0028】
ステップS303が終了すると、経路案内装置1は、現在位置を含む視界良好区間が視界データ記憶部19に記憶されているか否かを判定する処理を鈍化案内部14の処理として実行する(ステップS304)。
【0029】
経路案内装置1は、ステップS304において、現在位置を含む視界良好区間が視界データ記憶部19に記憶されていないと判定した場合は(ステップS304:No)、後述するステップS306へ移行する。また、経路案内装置1は、ステップS304において、現在位置を含む視界良好区間が視界データ記憶部19に記憶されていると判定した場合は(ステップS304:Yes)、推奨ルート上の区間であって視界データ記憶部19に記憶されている視界良好区間について、進行方向のリンクの変化より鈍化して案内するための誘導線を生成し、生成した誘導線を案内制御部17へ出力する処理を鈍化案内部14の処理として実行する(ステップS305)。本実施形態では、リンクの形状の参照処理を積分処理する方法として、リンク形状鈍化対象リンク列がなす形状について、角度を形成している部分にフィレット処理を施してなめらかな線形状に修正する方法を用いる。
【0030】
ステップS305が終了すると、経路案内装置1は、鈍化案内部14から案内制御部17へ出力された誘導線に対応する視界良好区間以外のリンクについてリンクの形状をそのまま反映させた案内情報としての誘導線を生成し、特定範囲内の誘導線を完成する処理を案内制御部17の処理として実行する(ステップS306)。図5における現在位置の地点PはノードN1を通過した直後の位置に存在している。経路案内装置1は、現在位置である地点Pは、視界良好区間であるリンクL1〜L6に含まれている。このため、図5に示す経路設定の一例に示す推奨ルートKRは、現在位置が地点Pのとき、図6に示すように、リンクL1〜L6が全体としてなす形状について、屈折部および曲線部を形成している部分を緩やかに修正した誘導線YSが生成される。図5に示すリンクL7については、現在位置の地点Pとの間に視界遮蔽指標が予め設定した閾値以上となっている公園周囲の塀HEのポリラインが存在しているので視界データ記憶部19に記憶されていない。ステップS306が終了すると、経路案内装置1は、誘導線を先に生成しておいた地図画像に重ねて生成した案内画像を画像表示部18へ出力する処理を案内制御部17の処理として実行し、画像表示部18において、案内制御部17から入力した案内画像を画像表示面に表示する(ステップS307)。ステップS307が終了すると、経路案内装置1は、ステップS301へ移行し、マップマッチングした位置が目的地であると判定するまで経路案内処理S300を繰り返す。
【0031】
<その他の例>
なお、本発明は上述の実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変更、改良が可能である。例えば、上述した実施形態においては、経路設定装置1はPNDであるが、車載専用ナビゲーション、携帯電話、GPS受信器付きパーソナルコンピュータにおいても利用することができる。
【0032】
また、上述した実施形態においては、経路設定装置1は、視界良好区間のリンクの形状を鈍化させる処理についてフィレット処理を行なっているが、リンクが連なる区間のリンク形状の状態によっては、例えば、ペジエ曲線を生成する処理を行なうようにしてもよい。
【0033】
また、上述した実施形態においては、経路設定装置1は、実際に存在する建造物の高さ情報に基づいて被案内者の視界を遮蔽する高さであるか否かを示す視界遮蔽指標を登録しているが、実際の状況を反映させることに限定されるものではない。たとえば、視界が開けている場合においても、交差点中央の車道部分にあたる、歩行者が自由に通行することが不可能である空間が含まれている場合には、車道など歩行不可能なエリアをポリゴン化したデータに視界遮蔽指標を登録しておくことで、その歩行可能なエリア内部でのみ鈍化した誘導線を生成するようにすることも可能である。
【0034】
また、上述した実施形態においては、経路設定装置1は、装置本体内に記憶部11、経路設定部13、鈍化案内部14および案内制御部17を備えたものとしているが、これらは装置本体内にあることに限定されるものではない。例えば、これら記憶部11、経路設定部13および鈍化案内部14を別途用意したデータセンター内に備える構成としてもよい。このような構成においては、装置本体とデータセンターとの間でデータの送受信を行うことになる。具体的には、まずは装置本体が現在位置情報をデータセンターへ送信し、データセンターは受信した現在位置情報に基づいて案内情報を生成して装置本体へ送信し、受信した案内情報を用いて装置本体が案内するという一連の処理が実行される。
【0035】
また、上述した実施形態においては、経路設定装置1は、現在位置を含む視界良好区間のみリンクの形状を鈍化して案内しているが、推奨ルート上のすべての視界良好区間についてリンクの形状を鈍化した誘導線を表示してもよい。
【0036】
また、上述した実施形態においては、経路設定装置1は、推奨ルートを設定した後に推奨ルートに含まれるすべての視界良好区間を抽出することとしているが、現在位置を更新するとき、または現在位置をマップマッチングしたリンクが更新するときに、現在位置を含む視界良好区間を抽出するようにしてもよい。
【符号の説明】
【0037】
1…経路設定装置
11…記憶部
13…経路設定部
14…鈍化案内部
15…現在位置検出部
16…案内部
19…視界データ記憶部
【特許請求の範囲】
【請求項1】
通路をリンクおよびノードで表現したネットワーク上に現在位置をマップマッチングするとともに、前記ネットワーク上に予め定められたルートの進行方向を前記リンクの形状を参照して案内する経路案内装置であって、
前記ネットワーク上にある被案内者の前記進行方向の視界の良否を記憶する視界データ記憶部と、
前記ルート上の区間であって前記視界データ記憶部に記憶されている進行方向の視界が良好である区間について、前記進行方向のリンクの変化より鈍化して案内する鈍化案内部と
を備えることを特徴とする経路案内装置。
【請求項2】
前記視界データ記憶部は、被案内者の前記進行方向の視界に前記被案内者の視界を遮蔽する高さの建造物が存在しない区間を前記進行方向の視界が良好である区間をとして記憶していることを特徴とする請求項1に記載の経路案内装置。
【請求項1】
通路をリンクおよびノードで表現したネットワーク上に現在位置をマップマッチングするとともに、前記ネットワーク上に予め定められたルートの進行方向を前記リンクの形状を参照して案内する経路案内装置であって、
前記ネットワーク上にある被案内者の前記進行方向の視界の良否を記憶する視界データ記憶部と、
前記ルート上の区間であって前記視界データ記憶部に記憶されている進行方向の視界が良好である区間について、前記進行方向のリンクの変化より鈍化して案内する鈍化案内部と
を備えることを特徴とする経路案内装置。
【請求項2】
前記視界データ記憶部は、被案内者の前記進行方向の視界に前記被案内者の視界を遮蔽する高さの建造物が存在しない区間を前記進行方向の視界が良好である区間をとして記憶していることを特徴とする請求項1に記載の経路案内装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−202838(P2012−202838A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−67978(P2011−67978)
【出願日】平成23年3月25日(2011.3.25)
【出願人】(597151563)株式会社ゼンリン (155)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月25日(2011.3.25)
【出願人】(597151563)株式会社ゼンリン (155)
【Fターム(参考)】
[ Back to top ]