
結び目のない縫合糸のアンカー
【課題】縫合糸アンカーを提供する。
【解決手段】縫合糸アンカーは、骨内に配置され、遠位アンカー本体から隣接する軟組織に繋がる縫合糸を有する遠位アンカー本体及び近位アンカー本体を含む。遠位アンカー本体が配置された後、縫合糸に張力がかけられ、次いで近位アンカー本体が遠位アンカー本体の後部にて骨内に推進されて、結び目のない技術にて縫合糸を固定する。
【解決手段】縫合糸アンカーは、骨内に配置され、遠位アンカー本体から隣接する軟組織に繋がる縫合糸を有する遠位アンカー本体及び近位アンカー本体を含む。遠位アンカー本体が配置された後、縫合糸に張力がかけられ、次いで近位アンカー本体が遠位アンカー本体の後部にて骨内に推進されて、結び目のない技術にて縫合糸を固定する。
【発明の詳細な説明】
【背景技術】
【0001】
本出願は縫合糸アンカーに関し、より詳細には、結び目のない縫合糸のアンカーに関する。
【0002】
縫合糸アンカーは、腱又は靭帯などの軟組織を、骨に付着させるために、一般的に用いられる。例えば、回旋筋腱板の修復では、縫合糸を、回旋筋腱板の腱の剥離部分、又は損傷部分に貫通させる。縫合糸アンカーを、近接する骨の中に植え込む。このアンカーに縫合糸を取り付けることによって、腱は、骨と接触するように引き寄せられ、腱と骨との付着が促進される。
【0003】
そのような手術は、細いカニューレを通じて、関節鏡下で実施される場合が多い。このことにより、患者に対する外傷は低減されるが、結び目を使用する、アンカーへの縫合糸の取り付けは、より困難になる。外科医が、所望の程度まで縫合糸に張力をかけ、次いで結び目を作る必要もなく、アンカーに縫合糸を固定することを可能にする、結び目のない縫合糸アンカーを用いることができる。典型的な結び目のないアンカーは、米国特許公報第20080033460号に示されており、縫合糸は、互いに同軸関係の、アンカーの内側部材と外側部材との間に捕捉される。そのようなアンカーは良好に機能するが、一方で、その複雑性が製造コストを増大させ、また金属又は従来のポリマーよりも脆くて低強度の場合が多い生体吸収性材料で、アンカーを形成することを困難にする。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、単純かつ洗練された設計で、従来技術のこれらの制限及び他の制限を克服する。
【課題を解決するための手段】
【0005】
本発明による縫合糸アンカーシステムは、縫合糸取付け部と、遠位アンカー本体から近位方向に伸びるガイドワイヤとを有する遠位アンカー本体と、ガイドワイヤを収容する寸法を有する、内部を通過する中心穴と、近位アンカー本体から延びる1つ又は2つ以上の保持強化部とを有する近位アンカー本体と、を備える。
【0006】
細長い可撓性部材を含む縫合糸通し具(suture passer)が、縫合糸取付け部に通され、かつループなどの遠位縫合糸捕捉構成を有し、前記ループに縫合糸が通過され得ることが好ましい。遠位アンカー本体は、細長いドライバー本体を有する第1のドライバーに装着され、遠位アンカー本体は遠位端に取り付けられ、ガイドワイヤはドライバー本体に沿って延びることが好ましい。
【0007】
1つ又は2つ以上の保持強化部は、ねじ山を含むことが好ましい。
【0008】
本発明による縫合糸アンカーシステムは、縫合糸取付け部と遠位突き錐先端部とを有する遠位アンカー本体を備える。遠位アンカー本体は、突き錐ドライバー上に装着され、それにより遠位アンカー本体は骨内に推進されて骨孔を形成することができる。近位アンカー本体は、遠位アンカー本体により形成された骨孔内に嵌合する寸法を有し、かつ近位アンカー本体から延びる1つ又は2つ以上の保持強化部を有する。
【0009】
遠位縫合糸捕捉構成を有する、細長い可撓性部材を含む縫合糸通し具は、縫合糸取付け部に通されてもよい。縫合糸捕捉構成は、内部を縫合糸が通過し得るループを含むことが好ましい。保持強化部は、ねじ山を含むことが好ましい。
【0010】
本発明による方法は、骨に対する軟組織の付着を提供する。本方法は、骨内に遠位縫合糸アンカー本体を植え込み、遠位縫合糸アンカー本体から骨の外部へと近位方向に延びるガイドワイヤを残留させる工程と、遠位縫合糸アンカー本体上の縫合糸取付け部に軟組織からの縫合糸を通す工程であって、縫合糸が、遠位縫合糸アンカー本体が骨内に植え込まれているとき、軟組織から遠位縫合糸アンカー本体へ、そして骨の外部へ延びる工程と、縫合糸の少なくとも一部分が近位縫合糸アンカー本体と骨との間に捕捉されるように、近位縫合糸アンカー本体をガイドワイヤ上を越えて骨内に植え込む工程と、を含む。
【0011】
遠位本体上の縫合糸取付け部に縫合糸を通す工程は、縫合糸取付け部に通された縫合糸シャトルの縫合糸捕捉区分内に縫合糸を配置した後、縫合糸取付け部を通して縫合糸シャトルを牽引して、縫合糸取付け部を通して縫合糸捕捉区分を引っ張り、したがって縫合糸を引っ張ることにより達成されることが好ましい。縫合糸シャトルは、遠位アンカー本体を植え込む工程の間、縫合糸取付け部を通して配置されていることが好ましい。
【0012】
近位アンカー本体にはねじ山がつけられており、近位アンカー本体を植え込む工程は、近位アンカー本体を遠位縫合糸本体の後部にて骨内に差し込む工程を含むことが好ましい。遠位アンカー本体を植え込んだ後、近位アンカー本体を完全に植え込むことにより縫合糸を固定する前に、所望の張力が縫合糸に適用されることが好ましい。
【0013】
本発明による方法は、骨に対する軟組織の付着を提供する。本方法は、遠位突き錐先端部と、内部を通過するある長さの縫合糸を有する縫合糸取付け部とを有する遠位縫合糸アンカー本体を用いて骨に孔を開け、骨孔を形成する工程であって、遠位縫合糸アンカー本体が突き錐ドライバー上に装着されている、工程と、突き錐ドライバーを除去し、骨孔内に植え込まれた遠位アンカー本体を、縫合糸の第1の部分が骨孔から外部に延びた状態で残留させる工程と、縫合糸の第2の部分を軟組織に通す工程と、第1の部分上を引っ張ることにより縫合糸に張力をかける工程と、縫合糸の少なくとも一部分が近位縫合糸アンカー本体と骨との間に捕捉されるように、近位縫合糸アンカー本体を遠位アンカー本体の近位にて骨孔内に植え込む工程と、を含む。
【0014】
近位アンカー本体にはねじ山がつけられており、近位アンカー本体を植え込む工程は、近位アンカー本体を遠位縫合糸本体の後部にて骨内に差し込む工程を含むことが好ましい。
【図面の簡単な説明】
【0015】
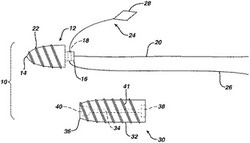
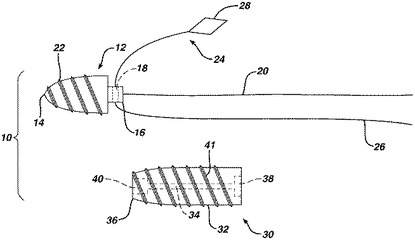
【図1】本発明による縫合糸アンカーの側立面図。
【図2】特に図1のアンカーの遠位アンカー本体が骨孔内に入る位置に存在する、骨及び図1のアンカーに隣接した腱断面における側立面図。
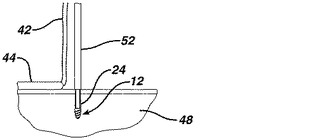
【図3】特に遠位アンカー本体が骨孔内に配置された後の、骨及び図1のアンカーに隣接した腱断面における側立面図。
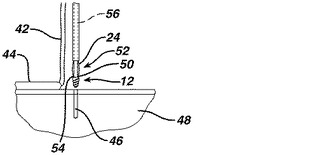
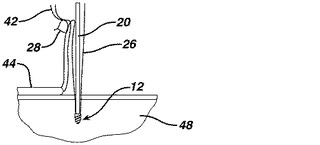
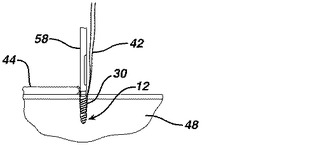
【図4】特に、腱からの縫合糸が、遠位アンカー本体に通された縫合糸シャトル内に負荷されている、骨及び図1のアンカーに隣接した腱断面における側立面図。
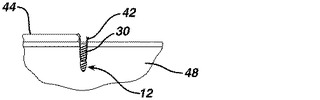
【図5】特に、腱からの縫合糸が縫合糸シャトルを介して移動した後に、遠位アンカー本体に負荷されている、骨及び図1のアンカーに隣接した腱断面における側立面図。
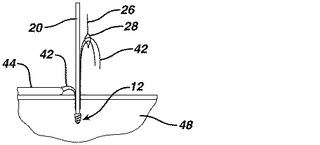
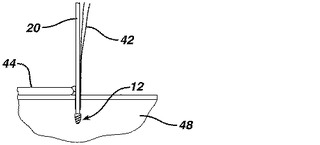
【図6】特に、縫合糸が張力をかけられている、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図7】特に、近位アンカー本体が、遠位アンカー本体の後部にて骨孔内に入る位置に存在する、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図8】特に遠位アンカーが骨孔内に完全に挿入されている、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図9】骨内へのアンカーの留置の完了を示す、骨及び図1のアンカーに隣接した腱断面における側立面図。
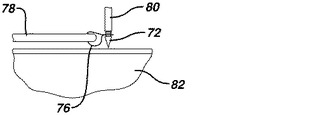
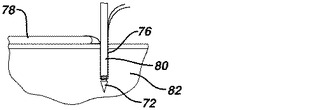
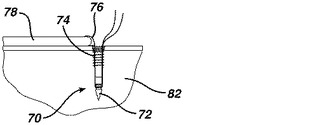
【図10】特に縫合糸アンカーの遠位アンカー本体が骨孔内に入る位置に存在する、骨及び本発明による縫合糸アンカーの更なる実施形態に隣接した腱断面における側立面図。
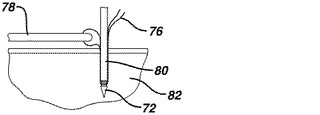
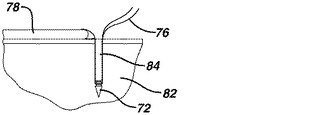
【図11】特に遠位アンカー本体が骨内に推進されている、骨及び図10のアンカーに隣接した腱断面における側立面図。
【図12】特に縫合糸が張力をかけられている、骨及び図10のアンカーに隣接した腱断面における側立面図。
【図13】遠位アンカー本体が骨内の定位置にあり、縫合糸が張力を受けていることを示す、骨及び図10のアンカーに隣接した腱断面における側立面図。
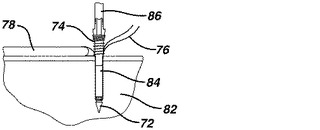
【図14】特に、近位アンカー本体が、遠位アンカー本体の後部にて骨孔内に入る位置に存在する、骨及び図10のアンカーに隣接した腱断面における側立面図。
【図15】特に第2のアンカー本体が骨内に完全に推進されている、骨及び図10のアンカーに隣接した腱断面における側立面図。
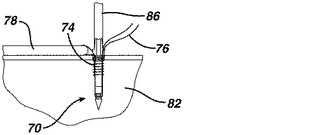
【図16】骨内へのアンカーの留置の完了を示す、骨及び図10のアンカーに隣接した腱断面における側立面図。
【発明を実施するための形態】
【0016】
図1は、本発明による、結び目のない縫合糸アンカー10を示す。縫合糸アンカー10は、尖った遠位先端部14と近位方向に延びる延長部16とを有する遠位アンカー本体12を含む。延長部16は、ドライバーツール(図1に示さず)と係合するための、例えば六角形などの形と、縫合糸(これも図1に示さず)を受容するための縫合糸開口18を内部に有する。ガイドワイヤ20は、アンカー本体12から近位方向に延び、摩擦又はねじ切りなどによりアンカー本体12に解放可能に接続している。本体12上のねじ山22は、本体12を骨内に差し込むことを可能にする。あるいは、遠位アンカー本体12は突き錐のように骨内に推進されてもよく、その場合、ねじ山22は、除去のために使用されてもよく、又は全体が省略されてもよい。例えばRaynham,MAのDePuy Mitek,Inc.から入手可能なCHIA PERC通し具(登録商標)のような縫合糸通し具24が、縫合糸開口18内に配置されている。縫合糸通し具24は細長い編成NITINOLワイヤ26を含み、前記ワイヤ26は、凧形状の遠位縫合糸捕捉ループ28を有する。
【0017】
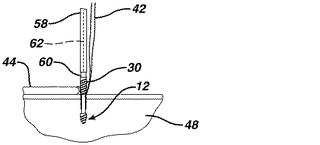
縫合糸アンカー10は更に、外部ねじ山32と、ガイドワイヤ20を摺動可能に収容する寸法を有する軸線方向の中心穴34とを有する近位アンカー本体30を含む。近位アンカー本体30は、丸い遠位端36と、好ましくは六角形の近位推進ツール受容凹部38とを有する。近位アンカー本体30はまた、以下に説明するように、遠位アンカー本体12の延長部16を収容する寸法を有して近位アンカー本体30を通常の骨の孔内により深く前進させる、軸線方向の遠位ソケット40が設けられてもよい。好ましくは、参照により本明細書に組み込まれる、West,Jr.に付与された米国特許第7,322,978号に記載されているように、ねじ山32と同一のピッチを有する追加の近位ねじ山開始部(thread start)41が設けられて、より硬い皮質骨材料内での更なる保持を提供してもよい。
【0018】
図2〜9は、図1の縫合糸アンカー10の使用を示す。ある長さの縫合糸42を、例えば回旋筋腱板内の腱などの組織44の一部分に通過させ、所望の位置において、隣接する骨48内にアンカー10を配置するための骨孔46を形成する。ドライバー52の遠位端50上に配置されている遠位アンカー本体12を、骨孔46の所に配置する(図2)。ドライバー52は、遠位アンカー本体12の近位延長部16と接合する遠位ツール末端部54を有し、ワイヤ26を受容するための1つ又は2つ以上の軸線方向ルーメン56又は溝を有する。次いで、遠位アンカー本体12を、骨孔46内に推進する(図3)。ドライバー52を除去し、遠位アンカー12を骨孔46内に残留させ、ガイドワイヤ20は骨孔46の外部へ近位方向に延びている。
【0019】
好ましい関節鏡下手技では、縫合糸42の末端部、ガイドワイヤ20、縫合糸捕捉ループ28、及びワイヤ26の他方の末端部は、全て、患者の外部に延び、次いで縫合糸42が捕捉ループ28内に負荷されるであろう(図4)。ワイヤ26を引くことにより、縫合糸42が遠位アンカー本体12の縫合糸孔18を通して移動される(図5)。縫合糸42に張力がかけられて、組織44の所望の位置及び組織44上の張力を提供する(図6)。近位アンカー本体30をガイドワイヤ20上を越えて遠位方向に通過させ、骨孔46の所に配置する(図7)。近位アンカー本体30は、遠位ツール末端部60を有する第2のドライバー58上に受容され、遠位ツール末端部60は、近位アンカー本体30のツール凹部38と接合し、ガイドワイヤ20を受容するための軸線方向ルーメン62又は溝を有する。この時点で、縫合糸42の最終的な張力調整を行ってもよく、次いで、近位アンカー本体30を骨孔46内に推進して縫合糸42を固定する(図8)。第2のドライバー58及びガイドワイヤ20を除去し、過剰な縫合糸42を切り取る(図9)。
【0020】
ソケット40の通路は遠位アンカー本体12の延長部16により遮断されないため、ソケット40によって近位アンカー本体30を骨孔30内に更に挿入することが可能となる。縫合糸42は近位アンカー本体30と骨孔46との間に捕捉されて固定され、また、近位アンカー本体30が最後まで推進されて遠位アンカー本体12と接触(contract)し、延長部16がソケット40内に受容された場合、縫合糸42は、遠位アンカー本体12と近位アンカー本体30との間にも捕捉されて、更に定着されることができる。場合により、延長部16及びソケット40は、係合して遠位アンカー本体12の追加の回転と骨内への更なる前進とを可能にするように構成されてもよい。
【0021】
図10〜16は、縫合糸アンカー10と類似するが、遠位アンカー本体72上のねじ切り、ガイドワイヤ、又は近位アンカー74内のガイドワイヤのための穴を有さない、遠位アンカー本体72及び近位アンカー本体74を有する本発明による押し込み型の縫合糸アンカー70の使用を示す。予め準備した孔の必要性を省略することにより、潜在的な誤差を低減するための工程を最小限にし、手術時間を短縮する。
【0022】
最初に、ある長さの縫合糸76を組織78に通過させ、遠位アンカー本体72上に負荷する。遠位アンカー本体72をドライバー80上に負荷して、遠位アンカー本体72が除去可能な突き錐先端部として機能する突き錐を形成し、遠位アンカー本体72を骨82上の所望の挿入位置に配置する(図10)。
【0023】
次いで、例えばドライバー80を打込むことにより、遠位アンカー本体72を骨82内に推進する(図11)。縫合糸76に張力をかけて組織78上に所望の張力を提供し(図12)、ドライバー80を除去して、遠位アンカー本体72を、遠位アンカー本体72の挿入により形成された骨孔84の底部にて定位置に残留させる(図13)。縫合糸76上に張力が維持されている間、第2のドライバー86上に負荷されている近位アンカー本体74を骨孔84内に挿入し(図14)、内部に完全に差し込んで縫合糸76を定位置に固定する(図15)。第2のドライバー86を除去し、過剰の縫合糸76を切り取り、手順を完了させる(図15)。
【0024】
図は、縫合糸アンカー10及び70の操作に焦点をあてるために、単一のアンカーと、組織を通した単純な縫合糸ループとを有する、単純な縫合技術を示している。しかしながら、本発明の縫合糸アンカー10及び70は、すくい綴じ縫合糸構成を用いた二列のアンカー固定(anchoring)のような、より複雑な構成に用途を有し、ここでアンカーの列(多くの場合、10又は70などの結び目のないアンカーではない)を腱の下に配置し、結び目のないアンカーの第2の列を腱の側方に配置し、縫合糸は腱を通して第1の列から第2の列へと交差パターンにて上方に延び、それによって腱を骨に保持する。
【0025】
本発明の新規縫合糸アンカーは、金属材料、非生分解性ポリマー、生分解性ポリマー、又は生分解性ポリマー若しくはコポリマーと生体機能性セラミックとの複合材料を含む多数の好適な材料から作製することができる。本明細書で使用するとき、生分解性という用語は、身体内で分解し、次いで身体内に吸収されるか又は身体から排出されるかのいずれかである材料を意味すると定義される。本明細書で使用するとき、生体機能性セラミックという用語は、身体組織と適合性がある、セラミック材料及びガラス材料を意味すると定義される。生体機能性セラミックは、好ましくは生分解性である。
【0026】
本発明のアンカーを製造するために使用することができる金属材料としては、ステンレス鋼、チタン、ニッケルとチタンとの合金、又は他の生体適合性金属材料が挙げられる。
【0027】
本発明のアンカーを製造するために使用することができる非生分解性材料としては、ポリエチレン、ポリプロピレン、PEEK(ポリエーテルエーテルケトン)、又は他の生体適合性の非吸収性ポリマーが挙げられる。
【0028】
本発明で使用されるアンカーを製造するために使用することができる生分解性ポリマーとしては、脂肪族ポリエステル、ポリオルトエステル、ポリ無水物、ポリカーボネート、ポリウレタン、ポリアミド、及びポリアルキレンオキシドからなる群から選択される生分解性ポリマーが挙げられる。好ましくは、生分解性ポリマーは、脂肪族ポリエステルのポリマー及びコポリマー、並びにそれらのブレンドである。脂肪族ポリエステルは、典型的には、開環重合で合成される。好適なモノマーとしては、乳酸、ラクチド(L−、D−、メソ、及びD、Lの混合を含む)、グリコール酸、グリコリド、ε−カプロラクトン、p−ジオキサノン(1,4−ジオキサン−2−オン)、トリメチレンカーボネート(1,3−ジオキサン−2−オン)、δ−バレロラクトン、及びこれらの組み合わせが挙げられるが、それらに限定されない。
【0029】
本発明の複合材料アンカーに使用することができる生体機能性セラミックとしては、モノ−、ジ−、トリ−、α−トリ−、β−トリ−、及びテトラ−リン酸カルシウム、ヒドロキシアパタイト、硫酸カルシウム、酸化カルシウム、炭酸カルシウム、リン酸マグネシウムカルシウムが挙げられる。β−リン酸トリトリカルシウムを使用することが、特に好ましい。生体機能性セラミックに加えて、バイオグラスもまた、この複合材料スクリューに使用することができる。バイオグラスとしては、リン酸ガラス及びリン酸バイオグラスを挙げることができる。
【0030】
好適な生体適合性の合成ポリマーとしては、脂肪族ポリエステル、ポリ(アミノ酸)、コポリ(エーテル−エステル)、シュウ酸ポリアルキレン、ポリアミド、チロシン誘導ポリカーボネート、ポリ(イミノカーボネート)、ポリオルトエステル、ポリオキサエステル、ポリアミドエステル、ポリオキサエステル含有アミン基、ポリ(無水物)、ポリホスファゼン、ポリウレタン、ポリ(エーテルウレタン)、ポリ(エステルウレタン)、ポリ(プロピレンフマレート)、ポリ(ヒドロキシアルカノエート)、及びこれらのブレンドからなる群から選択されるポリマーを挙げることができる。
【0031】
本発明の目的上、脂肪族ポリエステルとしては、ラクチド(乳酸、D−、L−、及びメソラクチドを含む)、グリコリド(グリコール酸を含む)、ε−カプロラクトン、p−ジオキサノン(1,4−ジオキサン−2−オン)、トリメチレンカーボネート(1,3−ジオキサン−2−オン)、トリメチレンカーボネートのアルキル誘導体、δ−バレロラクトン、β−ブチロラクトン、γ−ブチロラクトン、ε−デカラクトン、ヒドロキシブチレート、ヒドロキシバレレート、1,4−ジオキセパン−2−オン(その二量体1,5,8,12−テトラオキサシクロテトラデカン−7,14−ジオンを含む)、1,5−ジオキセパン−2−オン、6,6−ジメチル−1,4−ジオキサン−2−オン、2,5−ジケトモルホリン、ピバロラクトン、α,α−ジエチルプロピオラクトン、エチレンカーボネート、エチレンオキサレート、3−メチル−1,4−ジオキサン−2,5−ジオン、3,3−ジエチル−1,4−ジオキサン−2,5−ジオン、6,6−ジメチル−ジオキセパン−2−オン、6,8−ジオキサビシクロオクタン−7−オンのホモポリマー及びコポリマー、並びにこれらのポリマーブレンドが挙げられるが、それらに限定されない。更なる例示的なポリマー又はポリマーブレンドとしては、非限定的な例として、ポリジオキサノン、ポリヒドロキシブチレート−コ−ヒドロキシバレレート、ポリオルトカーボネート、ポリアミノカーボネート、及びポリトリメチレンカーボネートが挙げられる。本発明で用いられる脂肪族ポリエステルは、直鎖、分岐鎖又は星型構造を有するホモポリマー又はコポリマー(ランダム、ブロック、セグメント化、テーパ形状ブロック、グラフト、三元ブロックなど)であることができる。本発明の目的において、ポリ(イミノカーボネート)には、ドーム(Domb)ら編「生分解性ポリマーの手引き(Handbook of Biodegradable Polymers)」、ハードウッド・アカデミック・プレス(Hardwood Academic Press)、251〜272頁(1997年)にケムニッツァー(Kemnitzer)及びコーン(Kohn)により記載されたポリマーが挙げられると理解される。本発明の目的上、コポリ(エーテル−エステル)は、Cohn及びYounesによる、「Journal of Biomaterials Research」、Vol.22,993〜1009頁(1988年)、並びにCohnによる、「Polymer Preprints(ACS Division of Polymer Chemistry)」、Vol.30(1),498頁(1989年)に記載のコポリエステル−エーテル(例えば、PEO/PLA)が挙げられることが理解される。本発明の目的上、ポリアルキレンオキサレートとしては、米国特許第4,208,511号、同第4,141,087号、同第4,130,639号、同第4,140,678号、同第4,105,034号、及び同第4,205,399号に記載されているものが挙げられる。ポリホスファゼン、すなわち、L−ラクチド、D,L−ラクチド、乳酸、グリコリド、グリコール酸、パラ−ジオキサノン、トリメチレンカーボネート、及びE−カプロラクトンから作製される、コ−、ター−、及びより高次の混合モノマーを基にしたポリマーは、Allcockによる、「The Encyclopedia of Polymer Science」、Vol.13,31〜41頁,Wiley Intersciences,John Wiley & Sons,1988年、及びVandorpeらによる、Dombら編「Handbook of Biodegradable Polymers」、Hardwood Academic Press,161〜182頁(1997年)などに記載されている。ポリ無水物としては、HOOC−−C.sub.6H.sub.4−−O−−(−CH.sub.2).sub.m−−O−−C.sub.6H.sub.4−−COOH(式中、「m」は2〜8の範囲内の整数である)の形態の二塩基酸から誘導されたもの、及び12個までの炭素からなる脂肪族α〜ω二塩基酸を有する、そのコポリマーが挙げられる。ポリオキサエステル、ポリオキサアミド、並びにアミン及び/又はアミド基を含有するポリオキサエステルは、米国特許第5,464,929号、同第5,595,751号、同第5,597,579号、同第5,607,687号、同第5,618,552号、同第5,620,698号、同第5,645,850号、同第5,648,088号、同第5,698,213号、同第5,700,583号、及び同第5,859,150号のうちの1つ又は2つ以上に記載されている。ポリオルトエステルは、例えば、Dombら編「Handbook of Biodegradable Polymers」、Hardwood Academic Press,99〜118頁(1997年)に、Hellerによって記載されているものである。
【0032】
本発明について、その好ましい実施形態に関連して説明してきた。明らかに、先の詳細な説明を読み理解すると、修正及び変更が他者にも思いつくであろう。そのような修正及び変更が添付の特許請求の範囲及びその等価物の範疇に入る限り、本発明はそのような修正及び変更の全てを含むと解釈されるものとする。
【0033】
〔実施の態様〕
(1) 縫合糸アンカーシステムであって、
遠位アンカー本体であって、縫合糸取付け部と、前記遠位アンカー本体から近位方向に伸びるガイドワイヤとを有する、遠位アンカー本体と、
近位アンカー本体であって、前記ガイドワイヤを収容する寸法を有する、内部を通過する中心穴と、前記近位アンカー本体から延びる1つ又は2つ以上の保持強化部とを有する、近位アンカー本体と、を備える、縫合糸アンカーシステム。
(2) 前記縫合糸取付け部に通され、かつ遠位縫合糸捕捉構成を有する、細長い可撓性部材を含む縫合糸通し具を更に備える、実施態様1に記載の縫合糸アンカーシステム。
(3) 前記縫合糸捕捉構成が、縫合糸が通過され得るループを含む、実施態様2に記載の縫合糸アンカーシステム。
(4) 細長いドライバー本体を有する第1のドライバーを更に備え、前記遠位アンカー本体が前記第1のドライバーの遠位端に取り付けられ、前記ガイドワイヤが前記ドライバー本体に沿って延びる、実施態様1に記載の縫合糸アンカーシステム。
(5) 前記1つ又は2つ以上の保持強化部が、ねじ山を含む、実施態様1に記載の縫合糸アンカーシステム。
(6) 縫合糸アンカーシステムであって、
縫合糸取付け部と遠位突き錐先端部とを有する遠位アンカー本体であって、突き錐ドライバー上に装着され、それにより前記遠位アンカー本体が骨内に推進されて骨孔を形成することができる、遠位アンカー本体と、
近位アンカー本体であって、前記遠位アンカー本体により形成された骨孔内に嵌合する寸法を有し、かつ前記近位アンカー本体から延びる1つ又は2つ以上の保持強化部を有する、近位アンカー本体と、を備える、縫合糸アンカーシステム。
(7) 前記縫合糸取付け部に通され、かつ遠位縫合糸捕捉構成を有する、細長い可撓性部材を含む縫合糸通し具を更に備える、実施態様6に記載の縫合糸アンカーシステム。
(8) 前記縫合糸捕捉構成が、縫合糸が通過され得るループを含む、実施態様7に記載の縫合糸アンカーシステム。
(9) 前記保持強化部が、ねじ山を含む、実施態様6に記載の縫合糸アンカーシステム。
(10) 軟組織を骨に付着させるための方法であって、
前記骨内に遠位縫合糸アンカー本体を植え込み、前記遠位縫合糸アンカー本体から前記骨の外部へと近位方向に延びるガイドワイヤを残留させる工程と、
前記遠位縫合糸アンカー本体上の縫合糸取付け部に前記軟組織からの縫合糸を通す工程であって、前記遠位縫合糸アンカー本体が前記骨内に植え込まれているとき、前記縫合糸が前記軟組織から前記遠位縫合糸アンカー本体へ、そして前記骨の外部へ延びる、工程と、
前記縫合糸の少なくとも一部分が近位縫合糸アンカー本体と前記骨との間に捕捉されるように、前記近位縫合糸アンカー本体を前記ガイドワイヤ上を越えて前記骨内に植え込む工程と、を含む、方法。
【0034】
(11) 前記縫合糸取付け部に通された縫合糸シャトルの縫合糸捕捉区分内に前記縫合糸を配置した後、前記縫合糸取付け部を通して前記縫合糸シャトルを牽引して、前記縫合糸取付け部を通して前記縫合糸捕捉区分を引っ張り、したがって前記縫合糸を引っ張ることにより、前記遠位本体上の前記縫合糸取付け部に前記縫合糸を通す工程を更に含む、実施態様10に記載の方法。
(12) 前記縫合糸シャトルが、前記遠位アンカー本体を植え込む工程の間、前記縫合糸取付け部を通して配置されている、実施態様11に記載の方法。
(13) 前記近位アンカー本体にねじ山がつけられており、前記近位アンカー本体を植え込む工程が、前記近位アンカー本体を前記遠位縫合糸本体の後部にて前記骨内に差し込む工程を含む、実施態様10に記載の方法。
(14) 前記遠位アンカー本体を植え込んだ後、前記近位アンカー本体を完全に植え込むことにより前記縫合糸を固定する前に、所望の張力が前記縫合糸に適用される、実施態様10に記載の方法。
(15) 軟組織を骨に付着させるための方法であって、
遠位突き錐先端部と、内部を通過するある長さの縫合糸を有する縫合糸取付け部とを有する遠位縫合糸アンカー本体を用いて骨に孔を開け、骨孔を形成する工程であって、前記遠位縫合糸アンカー本体は突き錐ドライバー上に装着されている、工程と、
前記突き錐ドライバーを除去し、前記骨孔内に植え込まれた前記遠位アンカー本体を、前記縫合糸の第1の部分が前記骨孔から外部に延びた状態で残留させる工程と、
前記縫合糸の第2の部分を前記軟組織に通す工程と、
前記第1の部分上を引っ張ることにより前記縫合糸に張力をかける工程と、
前記縫合糸の少なくとも一部分が近位縫合糸アンカー本体と前記骨との間に捕捉されるように、前記近位縫合糸アンカー本体を前記遠位アンカー本体の近位にて前記骨孔内に植え込む工程と、を含む、方法。
(16) 前記近位アンカー本体にねじ山がつけられており、前記近位アンカー本体を植え込む工程が、前記近位アンカー本体を前記遠位縫合糸本体の後部にて前記骨内に差し込む工程を含む、実施態様15に記載の方法。
【背景技術】
【0001】
本出願は縫合糸アンカーに関し、より詳細には、結び目のない縫合糸のアンカーに関する。
【0002】
縫合糸アンカーは、腱又は靭帯などの軟組織を、骨に付着させるために、一般的に用いられる。例えば、回旋筋腱板の修復では、縫合糸を、回旋筋腱板の腱の剥離部分、又は損傷部分に貫通させる。縫合糸アンカーを、近接する骨の中に植え込む。このアンカーに縫合糸を取り付けることによって、腱は、骨と接触するように引き寄せられ、腱と骨との付着が促進される。
【0003】
そのような手術は、細いカニューレを通じて、関節鏡下で実施される場合が多い。このことにより、患者に対する外傷は低減されるが、結び目を使用する、アンカーへの縫合糸の取り付けは、より困難になる。外科医が、所望の程度まで縫合糸に張力をかけ、次いで結び目を作る必要もなく、アンカーに縫合糸を固定することを可能にする、結び目のない縫合糸アンカーを用いることができる。典型的な結び目のないアンカーは、米国特許公報第20080033460号に示されており、縫合糸は、互いに同軸関係の、アンカーの内側部材と外側部材との間に捕捉される。そのようなアンカーは良好に機能するが、一方で、その複雑性が製造コストを増大させ、また金属又は従来のポリマーよりも脆くて低強度の場合が多い生体吸収性材料で、アンカーを形成することを困難にする。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、単純かつ洗練された設計で、従来技術のこれらの制限及び他の制限を克服する。
【課題を解決するための手段】
【0005】
本発明による縫合糸アンカーシステムは、縫合糸取付け部と、遠位アンカー本体から近位方向に伸びるガイドワイヤとを有する遠位アンカー本体と、ガイドワイヤを収容する寸法を有する、内部を通過する中心穴と、近位アンカー本体から延びる1つ又は2つ以上の保持強化部とを有する近位アンカー本体と、を備える。
【0006】
細長い可撓性部材を含む縫合糸通し具(suture passer)が、縫合糸取付け部に通され、かつループなどの遠位縫合糸捕捉構成を有し、前記ループに縫合糸が通過され得ることが好ましい。遠位アンカー本体は、細長いドライバー本体を有する第1のドライバーに装着され、遠位アンカー本体は遠位端に取り付けられ、ガイドワイヤはドライバー本体に沿って延びることが好ましい。
【0007】
1つ又は2つ以上の保持強化部は、ねじ山を含むことが好ましい。
【0008】
本発明による縫合糸アンカーシステムは、縫合糸取付け部と遠位突き錐先端部とを有する遠位アンカー本体を備える。遠位アンカー本体は、突き錐ドライバー上に装着され、それにより遠位アンカー本体は骨内に推進されて骨孔を形成することができる。近位アンカー本体は、遠位アンカー本体により形成された骨孔内に嵌合する寸法を有し、かつ近位アンカー本体から延びる1つ又は2つ以上の保持強化部を有する。
【0009】
遠位縫合糸捕捉構成を有する、細長い可撓性部材を含む縫合糸通し具は、縫合糸取付け部に通されてもよい。縫合糸捕捉構成は、内部を縫合糸が通過し得るループを含むことが好ましい。保持強化部は、ねじ山を含むことが好ましい。
【0010】
本発明による方法は、骨に対する軟組織の付着を提供する。本方法は、骨内に遠位縫合糸アンカー本体を植え込み、遠位縫合糸アンカー本体から骨の外部へと近位方向に延びるガイドワイヤを残留させる工程と、遠位縫合糸アンカー本体上の縫合糸取付け部に軟組織からの縫合糸を通す工程であって、縫合糸が、遠位縫合糸アンカー本体が骨内に植え込まれているとき、軟組織から遠位縫合糸アンカー本体へ、そして骨の外部へ延びる工程と、縫合糸の少なくとも一部分が近位縫合糸アンカー本体と骨との間に捕捉されるように、近位縫合糸アンカー本体をガイドワイヤ上を越えて骨内に植え込む工程と、を含む。
【0011】
遠位本体上の縫合糸取付け部に縫合糸を通す工程は、縫合糸取付け部に通された縫合糸シャトルの縫合糸捕捉区分内に縫合糸を配置した後、縫合糸取付け部を通して縫合糸シャトルを牽引して、縫合糸取付け部を通して縫合糸捕捉区分を引っ張り、したがって縫合糸を引っ張ることにより達成されることが好ましい。縫合糸シャトルは、遠位アンカー本体を植え込む工程の間、縫合糸取付け部を通して配置されていることが好ましい。
【0012】
近位アンカー本体にはねじ山がつけられており、近位アンカー本体を植え込む工程は、近位アンカー本体を遠位縫合糸本体の後部にて骨内に差し込む工程を含むことが好ましい。遠位アンカー本体を植え込んだ後、近位アンカー本体を完全に植え込むことにより縫合糸を固定する前に、所望の張力が縫合糸に適用されることが好ましい。
【0013】
本発明による方法は、骨に対する軟組織の付着を提供する。本方法は、遠位突き錐先端部と、内部を通過するある長さの縫合糸を有する縫合糸取付け部とを有する遠位縫合糸アンカー本体を用いて骨に孔を開け、骨孔を形成する工程であって、遠位縫合糸アンカー本体が突き錐ドライバー上に装着されている、工程と、突き錐ドライバーを除去し、骨孔内に植え込まれた遠位アンカー本体を、縫合糸の第1の部分が骨孔から外部に延びた状態で残留させる工程と、縫合糸の第2の部分を軟組織に通す工程と、第1の部分上を引っ張ることにより縫合糸に張力をかける工程と、縫合糸の少なくとも一部分が近位縫合糸アンカー本体と骨との間に捕捉されるように、近位縫合糸アンカー本体を遠位アンカー本体の近位にて骨孔内に植え込む工程と、を含む。
【0014】
近位アンカー本体にはねじ山がつけられており、近位アンカー本体を植え込む工程は、近位アンカー本体を遠位縫合糸本体の後部にて骨内に差し込む工程を含むことが好ましい。
【図面の簡単な説明】
【0015】
【図1】本発明による縫合糸アンカーの側立面図。
【図2】特に図1のアンカーの遠位アンカー本体が骨孔内に入る位置に存在する、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図3】特に遠位アンカー本体が骨孔内に配置された後の、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図4】特に、腱からの縫合糸が、遠位アンカー本体に通された縫合糸シャトル内に負荷されている、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図5】特に、腱からの縫合糸が縫合糸シャトルを介して移動した後に、遠位アンカー本体に負荷されている、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図6】特に、縫合糸が張力をかけられている、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図7】特に、近位アンカー本体が、遠位アンカー本体の後部にて骨孔内に入る位置に存在する、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図8】特に遠位アンカーが骨孔内に完全に挿入されている、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図9】骨内へのアンカーの留置の完了を示す、骨及び図1のアンカーに隣接した腱断面における側立面図。
【図10】特に縫合糸アンカーの遠位アンカー本体が骨孔内に入る位置に存在する、骨及び本発明による縫合糸アンカーの更なる実施形態に隣接した腱断面における側立面図。
【図11】特に遠位アンカー本体が骨内に推進されている、骨及び図10のアンカーに隣接した腱断面における側立面図。
【図12】特に縫合糸が張力をかけられている、骨及び図10のアンカーに隣接した腱断面における側立面図。
【図13】遠位アンカー本体が骨内の定位置にあり、縫合糸が張力を受けていることを示す、骨及び図10のアンカーに隣接した腱断面における側立面図。
【図14】特に、近位アンカー本体が、遠位アンカー本体の後部にて骨孔内に入る位置に存在する、骨及び図10のアンカーに隣接した腱断面における側立面図。
【図15】特に第2のアンカー本体が骨内に完全に推進されている、骨及び図10のアンカーに隣接した腱断面における側立面図。
【図16】骨内へのアンカーの留置の完了を示す、骨及び図10のアンカーに隣接した腱断面における側立面図。
【発明を実施するための形態】
【0016】
図1は、本発明による、結び目のない縫合糸アンカー10を示す。縫合糸アンカー10は、尖った遠位先端部14と近位方向に延びる延長部16とを有する遠位アンカー本体12を含む。延長部16は、ドライバーツール(図1に示さず)と係合するための、例えば六角形などの形と、縫合糸(これも図1に示さず)を受容するための縫合糸開口18を内部に有する。ガイドワイヤ20は、アンカー本体12から近位方向に延び、摩擦又はねじ切りなどによりアンカー本体12に解放可能に接続している。本体12上のねじ山22は、本体12を骨内に差し込むことを可能にする。あるいは、遠位アンカー本体12は突き錐のように骨内に推進されてもよく、その場合、ねじ山22は、除去のために使用されてもよく、又は全体が省略されてもよい。例えばRaynham,MAのDePuy Mitek,Inc.から入手可能なCHIA PERC通し具(登録商標)のような縫合糸通し具24が、縫合糸開口18内に配置されている。縫合糸通し具24は細長い編成NITINOLワイヤ26を含み、前記ワイヤ26は、凧形状の遠位縫合糸捕捉ループ28を有する。
【0017】
縫合糸アンカー10は更に、外部ねじ山32と、ガイドワイヤ20を摺動可能に収容する寸法を有する軸線方向の中心穴34とを有する近位アンカー本体30を含む。近位アンカー本体30は、丸い遠位端36と、好ましくは六角形の近位推進ツール受容凹部38とを有する。近位アンカー本体30はまた、以下に説明するように、遠位アンカー本体12の延長部16を収容する寸法を有して近位アンカー本体30を通常の骨の孔内により深く前進させる、軸線方向の遠位ソケット40が設けられてもよい。好ましくは、参照により本明細書に組み込まれる、West,Jr.に付与された米国特許第7,322,978号に記載されているように、ねじ山32と同一のピッチを有する追加の近位ねじ山開始部(thread start)41が設けられて、より硬い皮質骨材料内での更なる保持を提供してもよい。
【0018】
図2〜9は、図1の縫合糸アンカー10の使用を示す。ある長さの縫合糸42を、例えば回旋筋腱板内の腱などの組織44の一部分に通過させ、所望の位置において、隣接する骨48内にアンカー10を配置するための骨孔46を形成する。ドライバー52の遠位端50上に配置されている遠位アンカー本体12を、骨孔46の所に配置する(図2)。ドライバー52は、遠位アンカー本体12の近位延長部16と接合する遠位ツール末端部54を有し、ワイヤ26を受容するための1つ又は2つ以上の軸線方向ルーメン56又は溝を有する。次いで、遠位アンカー本体12を、骨孔46内に推進する(図3)。ドライバー52を除去し、遠位アンカー12を骨孔46内に残留させ、ガイドワイヤ20は骨孔46の外部へ近位方向に延びている。
【0019】
好ましい関節鏡下手技では、縫合糸42の末端部、ガイドワイヤ20、縫合糸捕捉ループ28、及びワイヤ26の他方の末端部は、全て、患者の外部に延び、次いで縫合糸42が捕捉ループ28内に負荷されるであろう(図4)。ワイヤ26を引くことにより、縫合糸42が遠位アンカー本体12の縫合糸孔18を通して移動される(図5)。縫合糸42に張力がかけられて、組織44の所望の位置及び組織44上の張力を提供する(図6)。近位アンカー本体30をガイドワイヤ20上を越えて遠位方向に通過させ、骨孔46の所に配置する(図7)。近位アンカー本体30は、遠位ツール末端部60を有する第2のドライバー58上に受容され、遠位ツール末端部60は、近位アンカー本体30のツール凹部38と接合し、ガイドワイヤ20を受容するための軸線方向ルーメン62又は溝を有する。この時点で、縫合糸42の最終的な張力調整を行ってもよく、次いで、近位アンカー本体30を骨孔46内に推進して縫合糸42を固定する(図8)。第2のドライバー58及びガイドワイヤ20を除去し、過剰な縫合糸42を切り取る(図9)。
【0020】
ソケット40の通路は遠位アンカー本体12の延長部16により遮断されないため、ソケット40によって近位アンカー本体30を骨孔30内に更に挿入することが可能となる。縫合糸42は近位アンカー本体30と骨孔46との間に捕捉されて固定され、また、近位アンカー本体30が最後まで推進されて遠位アンカー本体12と接触(contract)し、延長部16がソケット40内に受容された場合、縫合糸42は、遠位アンカー本体12と近位アンカー本体30との間にも捕捉されて、更に定着されることができる。場合により、延長部16及びソケット40は、係合して遠位アンカー本体12の追加の回転と骨内への更なる前進とを可能にするように構成されてもよい。
【0021】
図10〜16は、縫合糸アンカー10と類似するが、遠位アンカー本体72上のねじ切り、ガイドワイヤ、又は近位アンカー74内のガイドワイヤのための穴を有さない、遠位アンカー本体72及び近位アンカー本体74を有する本発明による押し込み型の縫合糸アンカー70の使用を示す。予め準備した孔の必要性を省略することにより、潜在的な誤差を低減するための工程を最小限にし、手術時間を短縮する。
【0022】
最初に、ある長さの縫合糸76を組織78に通過させ、遠位アンカー本体72上に負荷する。遠位アンカー本体72をドライバー80上に負荷して、遠位アンカー本体72が除去可能な突き錐先端部として機能する突き錐を形成し、遠位アンカー本体72を骨82上の所望の挿入位置に配置する(図10)。
【0023】
次いで、例えばドライバー80を打込むことにより、遠位アンカー本体72を骨82内に推進する(図11)。縫合糸76に張力をかけて組織78上に所望の張力を提供し(図12)、ドライバー80を除去して、遠位アンカー本体72を、遠位アンカー本体72の挿入により形成された骨孔84の底部にて定位置に残留させる(図13)。縫合糸76上に張力が維持されている間、第2のドライバー86上に負荷されている近位アンカー本体74を骨孔84内に挿入し(図14)、内部に完全に差し込んで縫合糸76を定位置に固定する(図15)。第2のドライバー86を除去し、過剰の縫合糸76を切り取り、手順を完了させる(図15)。
【0024】
図は、縫合糸アンカー10及び70の操作に焦点をあてるために、単一のアンカーと、組織を通した単純な縫合糸ループとを有する、単純な縫合技術を示している。しかしながら、本発明の縫合糸アンカー10及び70は、すくい綴じ縫合糸構成を用いた二列のアンカー固定(anchoring)のような、より複雑な構成に用途を有し、ここでアンカーの列(多くの場合、10又は70などの結び目のないアンカーではない)を腱の下に配置し、結び目のないアンカーの第2の列を腱の側方に配置し、縫合糸は腱を通して第1の列から第2の列へと交差パターンにて上方に延び、それによって腱を骨に保持する。
【0025】
本発明の新規縫合糸アンカーは、金属材料、非生分解性ポリマー、生分解性ポリマー、又は生分解性ポリマー若しくはコポリマーと生体機能性セラミックとの複合材料を含む多数の好適な材料から作製することができる。本明細書で使用するとき、生分解性という用語は、身体内で分解し、次いで身体内に吸収されるか又は身体から排出されるかのいずれかである材料を意味すると定義される。本明細書で使用するとき、生体機能性セラミックという用語は、身体組織と適合性がある、セラミック材料及びガラス材料を意味すると定義される。生体機能性セラミックは、好ましくは生分解性である。
【0026】
本発明のアンカーを製造するために使用することができる金属材料としては、ステンレス鋼、チタン、ニッケルとチタンとの合金、又は他の生体適合性金属材料が挙げられる。
【0027】
本発明のアンカーを製造するために使用することができる非生分解性材料としては、ポリエチレン、ポリプロピレン、PEEK(ポリエーテルエーテルケトン)、又は他の生体適合性の非吸収性ポリマーが挙げられる。
【0028】
本発明で使用されるアンカーを製造するために使用することができる生分解性ポリマーとしては、脂肪族ポリエステル、ポリオルトエステル、ポリ無水物、ポリカーボネート、ポリウレタン、ポリアミド、及びポリアルキレンオキシドからなる群から選択される生分解性ポリマーが挙げられる。好ましくは、生分解性ポリマーは、脂肪族ポリエステルのポリマー及びコポリマー、並びにそれらのブレンドである。脂肪族ポリエステルは、典型的には、開環重合で合成される。好適なモノマーとしては、乳酸、ラクチド(L−、D−、メソ、及びD、Lの混合を含む)、グリコール酸、グリコリド、ε−カプロラクトン、p−ジオキサノン(1,4−ジオキサン−2−オン)、トリメチレンカーボネート(1,3−ジオキサン−2−オン)、δ−バレロラクトン、及びこれらの組み合わせが挙げられるが、それらに限定されない。
【0029】
本発明の複合材料アンカーに使用することができる生体機能性セラミックとしては、モノ−、ジ−、トリ−、α−トリ−、β−トリ−、及びテトラ−リン酸カルシウム、ヒドロキシアパタイト、硫酸カルシウム、酸化カルシウム、炭酸カルシウム、リン酸マグネシウムカルシウムが挙げられる。β−リン酸トリトリカルシウムを使用することが、特に好ましい。生体機能性セラミックに加えて、バイオグラスもまた、この複合材料スクリューに使用することができる。バイオグラスとしては、リン酸ガラス及びリン酸バイオグラスを挙げることができる。
【0030】
好適な生体適合性の合成ポリマーとしては、脂肪族ポリエステル、ポリ(アミノ酸)、コポリ(エーテル−エステル)、シュウ酸ポリアルキレン、ポリアミド、チロシン誘導ポリカーボネート、ポリ(イミノカーボネート)、ポリオルトエステル、ポリオキサエステル、ポリアミドエステル、ポリオキサエステル含有アミン基、ポリ(無水物)、ポリホスファゼン、ポリウレタン、ポリ(エーテルウレタン)、ポリ(エステルウレタン)、ポリ(プロピレンフマレート)、ポリ(ヒドロキシアルカノエート)、及びこれらのブレンドからなる群から選択されるポリマーを挙げることができる。
【0031】
本発明の目的上、脂肪族ポリエステルとしては、ラクチド(乳酸、D−、L−、及びメソラクチドを含む)、グリコリド(グリコール酸を含む)、ε−カプロラクトン、p−ジオキサノン(1,4−ジオキサン−2−オン)、トリメチレンカーボネート(1,3−ジオキサン−2−オン)、トリメチレンカーボネートのアルキル誘導体、δ−バレロラクトン、β−ブチロラクトン、γ−ブチロラクトン、ε−デカラクトン、ヒドロキシブチレート、ヒドロキシバレレート、1,4−ジオキセパン−2−オン(その二量体1,5,8,12−テトラオキサシクロテトラデカン−7,14−ジオンを含む)、1,5−ジオキセパン−2−オン、6,6−ジメチル−1,4−ジオキサン−2−オン、2,5−ジケトモルホリン、ピバロラクトン、α,α−ジエチルプロピオラクトン、エチレンカーボネート、エチレンオキサレート、3−メチル−1,4−ジオキサン−2,5−ジオン、3,3−ジエチル−1,4−ジオキサン−2,5−ジオン、6,6−ジメチル−ジオキセパン−2−オン、6,8−ジオキサビシクロオクタン−7−オンのホモポリマー及びコポリマー、並びにこれらのポリマーブレンドが挙げられるが、それらに限定されない。更なる例示的なポリマー又はポリマーブレンドとしては、非限定的な例として、ポリジオキサノン、ポリヒドロキシブチレート−コ−ヒドロキシバレレート、ポリオルトカーボネート、ポリアミノカーボネート、及びポリトリメチレンカーボネートが挙げられる。本発明で用いられる脂肪族ポリエステルは、直鎖、分岐鎖又は星型構造を有するホモポリマー又はコポリマー(ランダム、ブロック、セグメント化、テーパ形状ブロック、グラフト、三元ブロックなど)であることができる。本発明の目的において、ポリ(イミノカーボネート)には、ドーム(Domb)ら編「生分解性ポリマーの手引き(Handbook of Biodegradable Polymers)」、ハードウッド・アカデミック・プレス(Hardwood Academic Press)、251〜272頁(1997年)にケムニッツァー(Kemnitzer)及びコーン(Kohn)により記載されたポリマーが挙げられると理解される。本発明の目的上、コポリ(エーテル−エステル)は、Cohn及びYounesによる、「Journal of Biomaterials Research」、Vol.22,993〜1009頁(1988年)、並びにCohnによる、「Polymer Preprints(ACS Division of Polymer Chemistry)」、Vol.30(1),498頁(1989年)に記載のコポリエステル−エーテル(例えば、PEO/PLA)が挙げられることが理解される。本発明の目的上、ポリアルキレンオキサレートとしては、米国特許第4,208,511号、同第4,141,087号、同第4,130,639号、同第4,140,678号、同第4,105,034号、及び同第4,205,399号に記載されているものが挙げられる。ポリホスファゼン、すなわち、L−ラクチド、D,L−ラクチド、乳酸、グリコリド、グリコール酸、パラ−ジオキサノン、トリメチレンカーボネート、及びE−カプロラクトンから作製される、コ−、ター−、及びより高次の混合モノマーを基にしたポリマーは、Allcockによる、「The Encyclopedia of Polymer Science」、Vol.13,31〜41頁,Wiley Intersciences,John Wiley & Sons,1988年、及びVandorpeらによる、Dombら編「Handbook of Biodegradable Polymers」、Hardwood Academic Press,161〜182頁(1997年)などに記載されている。ポリ無水物としては、HOOC−−C.sub.6H.sub.4−−O−−(−CH.sub.2).sub.m−−O−−C.sub.6H.sub.4−−COOH(式中、「m」は2〜8の範囲内の整数である)の形態の二塩基酸から誘導されたもの、及び12個までの炭素からなる脂肪族α〜ω二塩基酸を有する、そのコポリマーが挙げられる。ポリオキサエステル、ポリオキサアミド、並びにアミン及び/又はアミド基を含有するポリオキサエステルは、米国特許第5,464,929号、同第5,595,751号、同第5,597,579号、同第5,607,687号、同第5,618,552号、同第5,620,698号、同第5,645,850号、同第5,648,088号、同第5,698,213号、同第5,700,583号、及び同第5,859,150号のうちの1つ又は2つ以上に記載されている。ポリオルトエステルは、例えば、Dombら編「Handbook of Biodegradable Polymers」、Hardwood Academic Press,99〜118頁(1997年)に、Hellerによって記載されているものである。
【0032】
本発明について、その好ましい実施形態に関連して説明してきた。明らかに、先の詳細な説明を読み理解すると、修正及び変更が他者にも思いつくであろう。そのような修正及び変更が添付の特許請求の範囲及びその等価物の範疇に入る限り、本発明はそのような修正及び変更の全てを含むと解釈されるものとする。
【0033】
〔実施の態様〕
(1) 縫合糸アンカーシステムであって、
遠位アンカー本体であって、縫合糸取付け部と、前記遠位アンカー本体から近位方向に伸びるガイドワイヤとを有する、遠位アンカー本体と、
近位アンカー本体であって、前記ガイドワイヤを収容する寸法を有する、内部を通過する中心穴と、前記近位アンカー本体から延びる1つ又は2つ以上の保持強化部とを有する、近位アンカー本体と、を備える、縫合糸アンカーシステム。
(2) 前記縫合糸取付け部に通され、かつ遠位縫合糸捕捉構成を有する、細長い可撓性部材を含む縫合糸通し具を更に備える、実施態様1に記載の縫合糸アンカーシステム。
(3) 前記縫合糸捕捉構成が、縫合糸が通過され得るループを含む、実施態様2に記載の縫合糸アンカーシステム。
(4) 細長いドライバー本体を有する第1のドライバーを更に備え、前記遠位アンカー本体が前記第1のドライバーの遠位端に取り付けられ、前記ガイドワイヤが前記ドライバー本体に沿って延びる、実施態様1に記載の縫合糸アンカーシステム。
(5) 前記1つ又は2つ以上の保持強化部が、ねじ山を含む、実施態様1に記載の縫合糸アンカーシステム。
(6) 縫合糸アンカーシステムであって、
縫合糸取付け部と遠位突き錐先端部とを有する遠位アンカー本体であって、突き錐ドライバー上に装着され、それにより前記遠位アンカー本体が骨内に推進されて骨孔を形成することができる、遠位アンカー本体と、
近位アンカー本体であって、前記遠位アンカー本体により形成された骨孔内に嵌合する寸法を有し、かつ前記近位アンカー本体から延びる1つ又は2つ以上の保持強化部を有する、近位アンカー本体と、を備える、縫合糸アンカーシステム。
(7) 前記縫合糸取付け部に通され、かつ遠位縫合糸捕捉構成を有する、細長い可撓性部材を含む縫合糸通し具を更に備える、実施態様6に記載の縫合糸アンカーシステム。
(8) 前記縫合糸捕捉構成が、縫合糸が通過され得るループを含む、実施態様7に記載の縫合糸アンカーシステム。
(9) 前記保持強化部が、ねじ山を含む、実施態様6に記載の縫合糸アンカーシステム。
(10) 軟組織を骨に付着させるための方法であって、
前記骨内に遠位縫合糸アンカー本体を植え込み、前記遠位縫合糸アンカー本体から前記骨の外部へと近位方向に延びるガイドワイヤを残留させる工程と、
前記遠位縫合糸アンカー本体上の縫合糸取付け部に前記軟組織からの縫合糸を通す工程であって、前記遠位縫合糸アンカー本体が前記骨内に植え込まれているとき、前記縫合糸が前記軟組織から前記遠位縫合糸アンカー本体へ、そして前記骨の外部へ延びる、工程と、
前記縫合糸の少なくとも一部分が近位縫合糸アンカー本体と前記骨との間に捕捉されるように、前記近位縫合糸アンカー本体を前記ガイドワイヤ上を越えて前記骨内に植え込む工程と、を含む、方法。
【0034】
(11) 前記縫合糸取付け部に通された縫合糸シャトルの縫合糸捕捉区分内に前記縫合糸を配置した後、前記縫合糸取付け部を通して前記縫合糸シャトルを牽引して、前記縫合糸取付け部を通して前記縫合糸捕捉区分を引っ張り、したがって前記縫合糸を引っ張ることにより、前記遠位本体上の前記縫合糸取付け部に前記縫合糸を通す工程を更に含む、実施態様10に記載の方法。
(12) 前記縫合糸シャトルが、前記遠位アンカー本体を植え込む工程の間、前記縫合糸取付け部を通して配置されている、実施態様11に記載の方法。
(13) 前記近位アンカー本体にねじ山がつけられており、前記近位アンカー本体を植え込む工程が、前記近位アンカー本体を前記遠位縫合糸本体の後部にて前記骨内に差し込む工程を含む、実施態様10に記載の方法。
(14) 前記遠位アンカー本体を植え込んだ後、前記近位アンカー本体を完全に植え込むことにより前記縫合糸を固定する前に、所望の張力が前記縫合糸に適用される、実施態様10に記載の方法。
(15) 軟組織を骨に付着させるための方法であって、
遠位突き錐先端部と、内部を通過するある長さの縫合糸を有する縫合糸取付け部とを有する遠位縫合糸アンカー本体を用いて骨に孔を開け、骨孔を形成する工程であって、前記遠位縫合糸アンカー本体は突き錐ドライバー上に装着されている、工程と、
前記突き錐ドライバーを除去し、前記骨孔内に植え込まれた前記遠位アンカー本体を、前記縫合糸の第1の部分が前記骨孔から外部に延びた状態で残留させる工程と、
前記縫合糸の第2の部分を前記軟組織に通す工程と、
前記第1の部分上を引っ張ることにより前記縫合糸に張力をかける工程と、
前記縫合糸の少なくとも一部分が近位縫合糸アンカー本体と前記骨との間に捕捉されるように、前記近位縫合糸アンカー本体を前記遠位アンカー本体の近位にて前記骨孔内に植え込む工程と、を含む、方法。
(16) 前記近位アンカー本体にねじ山がつけられており、前記近位アンカー本体を植え込む工程が、前記近位アンカー本体を前記遠位縫合糸本体の後部にて前記骨内に差し込む工程を含む、実施態様15に記載の方法。
【特許請求の範囲】
【請求項1】
縫合糸アンカーシステムであって、
遠位アンカー本体であって、縫合糸取付け部と、前記遠位アンカー本体から近位方向に伸びるガイドワイヤとを有する、遠位アンカー本体と、
近位アンカー本体であって、前記ガイドワイヤを収容する寸法を有する、内部を通過する中心穴と、前記近位アンカー本体から延びる1つ又は2つ以上の保持強化部とを有する、近位アンカー本体と、を備える、縫合糸アンカーシステム。
【請求項2】
前記縫合糸取付け部に通され、かつ遠位縫合糸捕捉構成を有する、細長い可撓性部材を含む縫合糸通し具を更に備える、請求項1に記載の縫合糸アンカーシステム。
【請求項3】
前記縫合糸捕捉構成が、縫合糸が通過され得るループを含む、請求項2に記載の縫合糸アンカーシステム。
【請求項4】
細長いドライバー本体を有する第1のドライバーを更に備え、前記遠位アンカー本体が前記第1のドライバーの遠位端に取り付けられ、前記ガイドワイヤが前記ドライバー本体に沿って延びる、請求項1に記載の縫合糸アンカーシステム。
【請求項5】
前記1つ又は2つ以上の保持強化部が、ねじ山を含む、請求項1に記載の縫合糸アンカーシステム。
【請求項6】
縫合糸アンカーシステムであって、
縫合糸取付け部と遠位突き錐先端部とを有する遠位アンカー本体であって、突き錐ドライバー上に装着され、それにより前記遠位アンカー本体が骨内に推進されて骨孔を形成することができる、遠位アンカー本体と、
近位アンカー本体であって、前記遠位アンカー本体により形成された骨孔内に嵌合する寸法を有し、かつ前記近位アンカー本体から延びる1つ又は2つ以上の保持強化部を有する、近位アンカー本体と、を備える、縫合糸アンカーシステム。
【請求項7】
前記縫合糸取付け部に通され、かつ遠位縫合糸捕捉構成を有する、細長い可撓性部材を含む縫合糸通し具を更に備える、請求項6に記載の縫合糸アンカーシステム。
【請求項8】
前記縫合糸捕捉構成が、縫合糸が通過され得るループを含む、請求項7に記載の縫合糸アンカーシステム。
【請求項9】
前記保持強化部が、ねじ山を含む、請求項6に記載の縫合糸アンカーシステム。
【請求項1】
縫合糸アンカーシステムであって、
遠位アンカー本体であって、縫合糸取付け部と、前記遠位アンカー本体から近位方向に伸びるガイドワイヤとを有する、遠位アンカー本体と、
近位アンカー本体であって、前記ガイドワイヤを収容する寸法を有する、内部を通過する中心穴と、前記近位アンカー本体から延びる1つ又は2つ以上の保持強化部とを有する、近位アンカー本体と、を備える、縫合糸アンカーシステム。
【請求項2】
前記縫合糸取付け部に通され、かつ遠位縫合糸捕捉構成を有する、細長い可撓性部材を含む縫合糸通し具を更に備える、請求項1に記載の縫合糸アンカーシステム。
【請求項3】
前記縫合糸捕捉構成が、縫合糸が通過され得るループを含む、請求項2に記載の縫合糸アンカーシステム。
【請求項4】
細長いドライバー本体を有する第1のドライバーを更に備え、前記遠位アンカー本体が前記第1のドライバーの遠位端に取り付けられ、前記ガイドワイヤが前記ドライバー本体に沿って延びる、請求項1に記載の縫合糸アンカーシステム。
【請求項5】
前記1つ又は2つ以上の保持強化部が、ねじ山を含む、請求項1に記載の縫合糸アンカーシステム。
【請求項6】
縫合糸アンカーシステムであって、
縫合糸取付け部と遠位突き錐先端部とを有する遠位アンカー本体であって、突き錐ドライバー上に装着され、それにより前記遠位アンカー本体が骨内に推進されて骨孔を形成することができる、遠位アンカー本体と、
近位アンカー本体であって、前記遠位アンカー本体により形成された骨孔内に嵌合する寸法を有し、かつ前記近位アンカー本体から延びる1つ又は2つ以上の保持強化部を有する、近位アンカー本体と、を備える、縫合糸アンカーシステム。
【請求項7】
前記縫合糸取付け部に通され、かつ遠位縫合糸捕捉構成を有する、細長い可撓性部材を含む縫合糸通し具を更に備える、請求項6に記載の縫合糸アンカーシステム。
【請求項8】
前記縫合糸捕捉構成が、縫合糸が通過され得るループを含む、請求項7に記載の縫合糸アンカーシステム。
【請求項9】
前記保持強化部が、ねじ山を含む、請求項6に記載の縫合糸アンカーシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−78580(P2013−78580A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−216080(P2012−216080)
【出願日】平成24年9月28日(2012.9.28)
【出願人】(507083478)デピュイ・ミテック・エルエルシー (47)
【住所又は居所原語表記】325 Paramount Drive,Raynham,Massachusetts 02767 United States of America
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2012−216080(P2012−216080)
【出願日】平成24年9月28日(2012.9.28)
【出願人】(507083478)デピュイ・ミテック・エルエルシー (47)
【住所又は居所原語表記】325 Paramount Drive,Raynham,Massachusetts 02767 United States of America
【Fターム(参考)】
[ Back to top ]