
結晶体の選別装置
【課題】所望の結晶体を自動的に判別することができ、良好な結晶体の回収率が高い結晶体の選別装置を提供する。
【解決手段】選別装置は、3台のカメラ1,2,3と、3つの照明1r,2r,3rと、カメラによる撮影画像を用いて結晶体の品質の良否を判定する判定部を有する演算処理装置と、結晶体D1が載置される供給ステージ6と、上記判定部により良品と判定された結晶体D2が貼付される貼付ステージ7と、一つの結晶体D1を保持して、ステージ6からステージ7に搬送する吸着コレット5(保持手段)とを具える。品質判定の予備工程として、照明1rや照明2rで照らした結晶体D1をカメラ1で撮影し、得られた画像を用いて結晶体D1の載置方向や特定の面の面積を検出する。照明1r,2rとして、結晶体D1に対する透過率が70%未満である低透過性光源を用いることで、良好な画像を取得することができ、良好な結晶体の回収率が向上する。
【解決手段】選別装置は、3台のカメラ1,2,3と、3つの照明1r,2r,3rと、カメラによる撮影画像を用いて結晶体の品質の良否を判定する判定部を有する演算処理装置と、結晶体D1が載置される供給ステージ6と、上記判定部により良品と判定された結晶体D2が貼付される貼付ステージ7と、一つの結晶体D1を保持して、ステージ6からステージ7に搬送する吸着コレット5(保持手段)とを具える。品質判定の予備工程として、照明1rや照明2rで照らした結晶体D1をカメラ1で撮影し、得られた画像を用いて結晶体D1の載置方向や特定の面の面積を検出する。照明1r,2rとして、結晶体D1に対する透過率が70%未満である低透過性光源を用いることで、良好な画像を取得することができ、良好な結晶体の回収率が向上する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、結晶体を自動的に選別する選別装置に関するものである。
【背景技術】
【0002】
従来、結晶体の製造方法として、成長面を有する種結晶を結晶成長させる方法が知られている。種結晶となる単結晶の粒の成長面は、例えば、特許文献1に記載される自動選別装置を利用すると容易に判別できる。
【0003】
上記自動選別装置は、複数の照明と、複数のカメラと、画像処理装置と、結晶粒を供給ステージから貼付ステージに移動する吸着コレットとを具える。この装置は、供給ステージ上にばら撒かれた結晶粒の撮像画像を画像処理し、この処理像を用いて成長面の欠陥の有無を判定し、良品を貼付ステージに移送し、不良品を回収箱に回収する。貼付ステージに載置された良品が種結晶に利用される。
【0004】
【特許文献1】特許第3646297号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
昨今、種結晶に使用可能である良好な結晶粒(良品)の回収率を高めて、生産効率を向上することが望まれている。しかし、従来は、良品の回収率を高めるための構成が十分に検討されていない。
【0006】
そこで、本発明の目的は、良好な結晶体の回収率を高められる結晶体の選別装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明者らが調べたところ、従来の装置では、良好な画像が取得できないことがあった。良好な画像、即ち、輝度差(明暗差(コントラスト比)が大きな画像)を取得するには、光量が大きい照明を用いることが好ましい。光量が大きな照明として、例えば、ハロゲンランプが挙げられる。しかし、ハロゲンランプを用いた撮影画像を調べたところ、結晶粒の全体外形(輪郭像)や所望の面の輪郭を適切に抽出できないことがあった。この原因の一つとして、ハロゲンランプの波長領域(一例として500〜900nm程度、ピーク波長680nm程度)において、結晶体(例えば、Ib型ダイヤモンド)に対する透過率が70%と高いことで、輝度差が大きな画像が得られ難くなることがある、と考えられる。そこで、結晶体に対する透過率が低い光源を利用したところ、輝度差が大きな画像が取得し易くなり、結果として良品の回収率を向上できた。本発明は、これらの知見に基づくものであり、良好な画像を取得し易くするために特定の照明を具える。
【0008】
具体的には、本発明結晶体の選別装置は、照明で照らした結晶体をカメラで撮影し、得られた画像を用いて判定部が結晶体の品質の良否を判定するものであり、上記照明として、結晶体に対する透過率が70%未満である低透過性光源を具えることを特徴とする。
【0009】
低透過性光源の透過率は、選別対象である結晶体の物性に応じて選択することができる。透過率が低いほど、輝度差が大きい画像を取得し易い傾向にあるため、透過率は低いほど好ましく、60%以下、特に30%以下が好ましい。更に、透過率が10%であると、輝度差が大きな画像が得られることから、透過率は10%以下がより好ましい。
【0010】
上記低透過性光源は、所望の透過率が得られるような波長領域のものを種々利用できる。例えば、赤外線領域、可視光線領域(下限波長:360〜400nm程度、上限波長:760〜830nm程度)、及び紫外線領域のいずれかを利用できる。可視光線領域の波長の光源を用いると、作業者が視覚的に確認することができる。特に、可視光領域において500nm未満といった短波長域では結晶体の透過率が低く好ましい。
【0011】
本発明選別装置の選別対象である結晶体は、任意に選択することができる。例えば、ダイヤモンド、cBN、ルチル、サファイア、MgO、ZnSeなどが挙げられる。
【0012】
本発明装置は、低透過性光源を用いて撮影した画像を二値化する二値化処理部と、この二値化処理部により二値化された二値化像をハフ変換して直線成分を抽出する直線抽出部と、この直線抽出部により抽出された複数の直線成分がなす角を演算する角度演算部と、この角度演算部により演算された角度が所定の大きさか否かを判定する角度判定部とを具える構成が好ましい。特に、上記演算された角度が所定の大きさでないと判定されたとき、上記二値化処理部は、二値化の閾値を変化させて二値化像を取得し、上記直線抽出部は、新たに取得した二値化像から直線成分の抽出を行い、上記角度判定部は、新たに抽出された直線成分がなす角が所定の大きさか否かを判定する構成とすることが好ましい。
【0013】
結晶体の品質の良否判定にあたり、撮影画像をそのまま用いるよりも、二値化した二値化像を利用すると、結晶体の形状や大きさを精度よく検出できる。このとき、二値化の閾値を固定値とし、二値化から角度判定までの処理を1回としてもよいが、1回目の角度判定で所定の角度で無いと判定された結晶体に対し、閾値を初期値から変動させて、二値化から角度判定までの処理を複数回繰り返す構成とすると、1回の撮影で得られた画像に対して、所定の角度を満たすと判定される結晶体数を増加することができる。従って、この構成によれば、結晶体の形状や大きさを高精度に検出できる上に、結果として良好な結晶体の回収率を高められる。
【0014】
本発明装置は、検査台に載置された複数の結晶体から、一つの結晶体を取り出して保持する保持手段と、この保持手段に保持された結晶体の良否を判定部が判定したとき、不良と判定された不良品を回収する回収箱(第一の回収箱)と、保持手段に保持された不良品を回収箱内に収集するために吸引する吸引手段(第一の吸引手段)とを具える構成とすることが好ましい。
【0015】
この構成によれば、保持手段で保持された一つの結晶体の良否判定を確実に行える。また、この構成は、吸引手段で強制的に不良品を吸引して、不良品を保持手段から回収箱に収めるため、例えば、保持手段が不良品を離して不良品の自重により回収箱に収める構成と比較して、不良品を回収箱に確実に回収できる。
【0016】
本発明装置は、検査台に載置された複数の結晶体において、各結晶体が所定の載置方向を向いているか否かを判定する載置方向判定部と、この載置方向判定部により、所定の載置方向を向いていないと判定された結晶体を回収する回収箱(第二の回収箱)と、当該結晶体を上記検査台から第二の回収箱に収集するために吸引する吸引手段(第二の吸引手段)を具える構成とすることが好ましい。
【0017】
結晶体の品質の良否判定の予備工程として、検査台に載置した状態で結晶体が所定の条件を満たすか否かを判定する場合、所定の条件を満たしていないと判定された結晶体を検査台から回収するにあたり、上記吸引手段を用いることで、回収対象となった結晶体を回収箱に確実に収集でき、回収対象となった結晶体が検査台に取り残されることを防止できる。
【0018】
結晶体を回収する上記回収箱は、メッシュサイズの異なる網部材が回収箱の深さ方向に並べて配置されたものが好ましい。上記網部材は、メッシュサイズが結晶体の外径よりも小さい蓋用網部材と、メッシュサイズが結晶体の外径よりも大きく、かつ結晶体の外径の4倍以下である流動規制用網部材とを具えるものが好ましい。この流動規制用網部材は、上記蓋用網部材よりも回収箱の深さ方向の下方に蓋用網部材から離間して配置されて、回収箱内で結晶体が流動する範囲を規制する構成とすることが好ましい。
【0019】
上述の吸引手段により吸引して回収箱に結晶体を回収する場合、回収箱への排気により、回収箱内で結晶体が舞い上がったり、回収箱の内周面や結晶体同士が衝突して騒音が生じることが考えられる。これに対し、メッシュサイズが細かい網部材を蓋として利用することで、結晶体が回収箱外に飛散することを防止できる上に、回収箱内にメッシュサイズが大きい網部材を仕切りとして利用することで上記舞い上がりを抑制し、回収箱内における結晶体の流動範囲を規制することができる。かつ、これら蓋や仕切りが網部材からなるため、排気を十分に行える。
【発明の効果】
【0020】
本発明結晶体の選別装置によれば、所定の結晶体の選別を自動的に行えると共に、良好な結晶体の回収率が高い。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照して本発明選別装置を詳細に説明する。
(実施形態1)
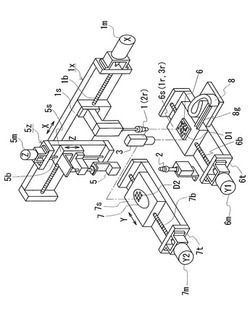
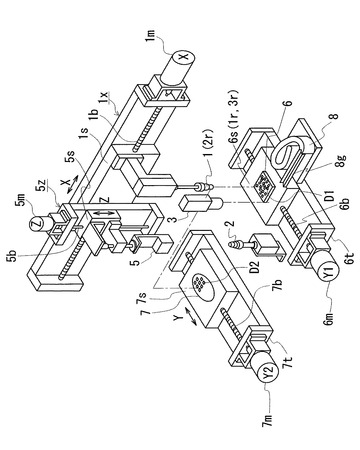
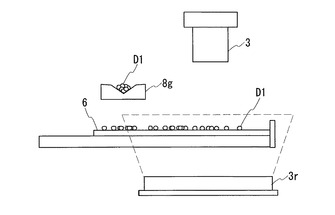
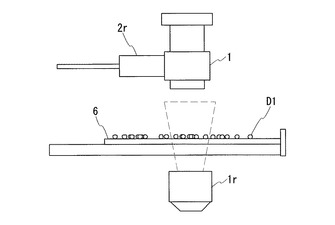
ここでは、供給ステージ(検査台)に載置した多数の結晶体から、所定の条件を満たす良好な結晶体を選別し、選別された結晶体を貼付ステージに貼り付ける場合について説明する。特に、結晶体をIb型ダイヤモンドとし、所定の大きさの成長面を有する結晶体を種結晶として選別する場合を例とする。図1は、本発明選別装置の概略斜視図、図2〜4は、選別工程の説明図であり、図2は、結晶体の粗位置検出工程、図3は、結晶体の載置方向検出工程、図4は、結晶体の特定の面の面積検出工程を示し、図6は、演算処理装置を中心に示す本発明選別装置の機能ブロック図である。なお、図2〜4に示す破線は、照明からの光を模式的に示す。また、図面において同一符号は同一物を示す。
【0022】
まず、装置の概略構成、次に、この装置を用いた結晶体の選別手順を説明し、最後に、本発明選別装置の特徴点を説明する。
【0023】
[全体構成]
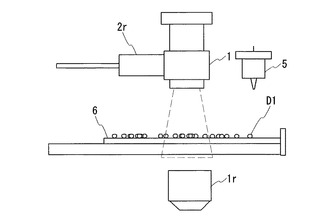
この装置の基本的構成は、特許文献1に示す装置と同様であり、3台のカメラ1,2,3と、3つの照明1r,2r,3rと、カメラによる撮影画像を用いて結晶体の品質の良否を判定する判定部40(以下、品質判定部と呼ぶ、図6)を有する演算処理装置4(図6)とを主な構成とする。更に、この装置は、一つの結晶体D1を保持する吸着コレット5(保持手段)と、結晶体D1が載置される供給ステージ6と、品質判定部40により良品と判定された結晶体D2が貼付される貼付ステージ7とを具える。
【0024】
カメラ1(以下、上面カメラと呼ぶ)は、供給ステージ6に載置された複数の結晶体D1のうち、一つの結晶体を上面から撮像できるように、供給ステージ6の上方に配置され、上記結晶体D1の上面画像の取得に用いられる。カメラ2(以下、下面カメラと呼ぶ)は、吸着コレット5に保持された結晶体D1を下面から撮影できるように配置され、上記結晶体D1の下面画像の取得に用いられる。カメラ3(以下、粗位置カメラと呼ぶ)は、供給ステージ6に載置された複数の結晶体D1を上面から撮影できるように、結晶体D1の上方に配置され、各結晶体D1の粗位置を検出するための上面画像の取得に用いられる。
【0025】
カメラ1〜3はいずれもCCDカメラなどが好適に利用できる。上面カメラ1は、移動機構1xによってX軸方向に移動可能である。下面カメラ2には、このカメラ2の光軸と同軸の落射照明(図示せず)と、偏光フィルタ(図示せず)とを具え、結晶体からの所定の光成分のみを抽出した画像を取得できる。カメラ2,3も移動機構(図示せず)を具える。
【0026】
照明1r(以下、下方側照明と呼ぶ)は、供給ステージ6が配置されるスライダ6sに内蔵され、供給ステージ6に載置された結晶体D1を下方から照らす透過照明であり、上面カメラ1による撮影の際に用いられる。照明2r(以下、上方側照明と呼ぶ)は、上面カメラ1に取り付けられ、上面カメラ1の光軸と同軸の落射照明である。この上方側照明2rは、供給ステージ6に載置された結晶体D1を上方から照らし、上面カメラ1による撮影の際に用いられる。照明3r(以下、位置検出用照明と呼ぶ)も下方側照明1rと同様にスライダ6sに内蔵され、供給ステージ6に載置された結晶体D1を下方から照らす透過照明であり、粗位置カメラ3による撮影の際に用いられる。
【0027】
吸着コレット5は、吸引機構(図示せず)により結晶体D1を吸着して供給ステージ6から貼付ステージ7に搬送する保持具である。この吸着コレット5は、上面カメラ1の移動機構1xによりX軸方向に移動可能であると共に、移動機構5zによりZ軸方向に移動可能である。移動機構1x,5zは、モータ1m,5mでボールねじ1b,5bを回転させ、このボールねじ1b,5bに螺合されたスライダ1s,5sを各ボールねじ1b,5bの軸方向に移動させて、上面カメラ1や吸着コレット5を移動させる。
【0028】
各ステージ6,7は、供給テーブル6t,貼付テーブル7tに具えるスライダ6s,7sに載置される。供給ステージ6は、選別前の結晶体D1が載置され、貼付ステージ7には選別後の結晶体D2(良品)が貼り付けられる。供給ステージ6には、ガイド8gが接続されたフィーダ8が設けられる。フィーダ8は、ガイド8gを介して供給ステージ6上に結晶体D1を供給する。各テーブル6t,7tは、各ステージ6,7の移動機構を具える。この移動機構は、上述のカメラなどの移動機構1x,5zと同様の構成である。即ち、モータ6m,7mがボールねじ6b,7bを回転させることで、このボールねじ6b,7bに螺合されたスライダ6s,7sを各ボールねじ6b,7bの軸方向(Y軸方向)に移動させる。その結果、各ステージ6,7が移動する。
【0029】
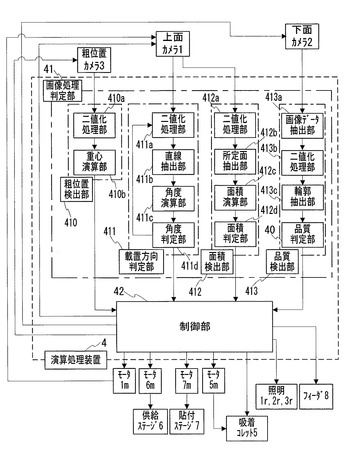
演算処理装置4は、図6に示すように各カメラ1,2,3が取得した画像を処理し、種々の演算や判定を行う画像処理判定部41と、各構成部材の移動機構・カメラ1,2,3・照明1r,2r,3r・吸着コレット5・フィーダ8などの各構成部材の動作を制御する制御部42とを具える。このような演算処理装置は、汎用のパーソナルコンピュータが利用できる。演算処理装置4には、取得した画像や選別結果を表示可能なモニタ(図示せず)を接続させており、モニタの制御も上記制御部42が行う。
【0030】
画像処理判定部41は、粗位置カメラ3から取得した画像を処理して各結晶体の粗位置を検出する粗位置検出部410と、上面カメラ1から取得した画像を処理して各結晶体の載置方向を検出する載置方向判定部411と、上面カメラ1から取得した画像を処理して各結晶体の特定の面の面積を検出する面積検出部412と、品質判定部40を有する品質検出部413と、種々のデータを記憶する記憶部(図示せず)とを具える。各検出部410,412,413や判定部411の詳細は、選別手順と共に後述する。
【0031】
[選別手順]
上記構成を具える選別装置は、以下の手順により、複数の結晶体D1から特定の結晶体D2を自動的に選別する。各種の処理には、図6を参照する。
【0032】
(1)結晶体D1の粗位置検出(図2参照)
フィーダ8(図1)からガイド8gを介して供給ステージ6上に結晶体D1(種結晶)をばら撒き、供給ステージ6の下方から位置検出用照明3rで照らした状態で、粗位置カメラ3で複数の結晶体D1を撮影する。取得した撮影画像を、演算処理装置4に具える画像処理判定部41の粗位置検出部410に取り込んで二値化処理部410aで二値化する。重心演算部410bは、得られた二値化像を基に各結晶体の重心を演算する。得られた重心の位置データに基づいて、制御部42は、モータ1mやモータ6mを駆動させて上面カメラ1や供給ステージ6を移動させ、上面カメラ1が一つの結晶体D1を撮影できるように、上面カメラ1の位置を制御する。
【0033】
(2)結晶体D1の載置方向検出(図3参照)
次に、粗位置カメラ3から上面カメラ1に、位置検出用照明3rを下方側照明1rに切り換えて、上面カメラ1で一つの結晶体D1を撮影する。得られた撮影画像(上面投影画像)を、演算処理装置4に具える画像処理判定部41の載置方向判定部411に取り込む。載置方向判定部411は、二値化処理部411aで撮影画像を二値化した後、得られた二値化像から結晶体の輪郭点を抽出し、この輪郭点のデータから結晶体の全体外形(輪郭像)をつくる各直線のなす角度を求める。具体的には、直線抽出部411bは、抽出された輪郭点から直線成分を抽出するためにハフ変換を行って輪郭像をつくる直線群を抽出し、抽出した直線群から直線成分の交点を求め、この交点がつくる図形を多角形の輪郭像に近似する。そして、角度演算部411cは、上記近似処理により直線成分のなす角度を求め、角度判定部411dは、求めた角度と、予め設定した所定の角度とを照合し、求めた角度が所定の角度であるか否かを判定する。載置方向判定部411は、この判定結果から、撮影した結晶体D1の載置方向を特定する。
【0034】
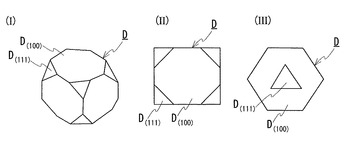
例えば、結晶体Dが図5に示すようなダイヤモンドである場合、(100)面D(100)を上面として結晶体Dを載置して上方から見ると、その輪郭像は、図5(II)に示すようにn角形状(n=4〜8、ここではn=4の正方形状)に見える。(111)面D(111)を上面として結晶体Dを載置して上方から見ると、その輪郭像は、図5(III)に示すように六角形状に見える。前者の場合、輪郭像をつくる直線がなす幾何学的理論値はn=4のとき90°(その他、例えばn=8のとき135°)である。後者の場合、120°である。従って、所定の角度として、所望の幾何学的理論値を設定して、予め記憶部に登録しておき、角度演算部411cにより演算された角度が記憶部から呼び出した値を満たすか否か(適合するか否か)を角度判定部411dで判定することで、載置方向判定部411は、結晶体の載置方向を特定できる。
【0035】
結晶体の載置方向が所定の方向である場合、次の面積検出を行う。結晶体の載置方向が所定の方向でない場合、その結晶体を供給ステージ6から回収し、別の結晶体の載置方向を検出するために、上面カメラ1や供給ステージ6を移動する。以下、供給ステージ6に載置された全ての結晶体D1について、載置方向の検出を行う。供給ステージ6からの結晶体D1の回収は、供給ステージ6上の全ての結晶体D1について一連の検出が終わってからまとめて行う。各工程ごとに逐次、結晶体の回収を行ってもよい。
【0036】
(3)結晶体D1の特定の面の面積検出(図4参照)
次に、下方側照明1rを上方側照明2rに切り換えて、載置方向が所定の方向であると判定された結晶体D1を再度上面カメラ1で撮影する。得られた撮影画像(上面反射画像)を演算処理装置4に具える画像処理判定部41の面積検出部412に取り込み、二値化処理部412aで二値化する。その後、所定面抽出部412bは、上述の全体外形(輪郭像)を取得する場合と同様の手法でハフ変換及び近似処理を利用して、二値化像から特定の面を抽出する。例えば、結晶体がダイヤモンドである場合、各面の輪郭をつくる直線がなす幾何学的理論値が決まっている(例えば、(100)面の場合:45°,90°,135°、(111)面の場合:60°,120°)。そのため、上述したように所望の幾何学的理論値を予め記憶部に登録して照合できるようにしておき、抽出した直線成分のなす角度が所定の角度であるか否かを判定することで、特定の面か否かを判別できる。抽出された特定の面について、面積演算部412cは、面積を演算する。そして、面積判定部412dは、予め設定して記憶部に登録しておいた所定の値(面積閾値)を呼び出し、演算された面積が面積閾値を満たすか否かを判定する。
【0037】
結晶体の特定の面の面積が所定の大きさである場合、次の品質判定を行うために当該結晶体を吸着コレット5で取り出す。このとき、演算処理装置4は、上面カメラ1を利用して得られた輪郭像の重心を演算して結晶体の正確な位置データを求め、この重心と上面カメラ1の画面の中心(光軸)とが一致するように位置データを修正し、この修正された位置データに基づき、吸着コレット5を移動させる。
【0038】
結晶体の特定の面の面積が所定の大きさでない場合、その結晶体を供給ステージ6から回収し、別の結晶体の載置方向や面積を検出するために、上面カメラ1や供給ステージ6を移動する。以下、供給ステージ6に載置された全ての結晶体D1について、載置方向の検出を行い、所定の載置方向である結晶体D1について特定の面の面積の検出を行うことを繰り返す。
【0039】
上記(2),(3)を品質判定の予備工程として行う。このような予備工程を具えることで、品質判定を行う結晶体数を低減する(絞る)ことができ、複数の結晶体の中から良好な結晶体を効率よく選別することができる。
【0040】
(4)結晶体D1の品質判定(図1参照)
次に、吸着コレット5で保持した結晶体D1の直下に下面カメラ2を移動させて、結晶体D1の下方画像を取得し、下面の品質を判定する。撮影手法は、特許文献1に記載されるような下面カメラ2の光軸と同軸の落射照明と、偏光フィルタとを用いた方法が利用できる。具体的には、偏光フィルタの偏光特性を用いない像(ここでは、上述の面積を演算した特定の面の対向面の像)と、用いた像(ここでは、同対向面の周囲に存在する面(対向面以外の面)の像)とをそれぞれ下面カメラ2で撮影する。得られた二つの下方画像を演算処理装置4に具える画像処理判定部41の画像データ抽出部413aに取り込む。画像データ抽出部413aは、両下方画像について画像データ間の演算により両像の差分を求めることで、下面カメラ2の光軸(又は光軸と平行な直線)と実質的に直交する結晶面のみの画像を抽出する。
【0041】
抽出された結晶面の画像を二値化処理部413bで二値化する。輪郭抽出部413cは、得られた二値化像から、上述の全体外形(輪郭像)を取得する場合と同様の手法、即ち、ハフ変換及び近似処理を利用して、輪郭データの抽出を行う。得られた輪郭データを用いて品質判定部40は、抽出された結晶面に欠けなどの欠陥が有るか否かを判定する。例えば、この結晶面に欠けが存在すると、欠け部分は落射光を反射しない。従って、演算処理装置4は、上述した特定の面の輪郭像と抽出された結晶面の像において各々の重心を演算し、両者に一定値以上の乖離を生じれば結晶面に欠けがあると判定することができる。
【0042】
上記判定の結果、抽出された結晶面に欠陥が無いと判断された結晶体(良品)を吸着コレット5でX軸方向に搬送し、更にZ軸方向に下降させて貼付ステージ7に貼り付ける。この搬送は、予め設定した結晶体の貼り付け位置データに基づいて制御すればよい。
【0043】
抽出された結晶面に欠陥が有ると判断された結晶体(不良品)は、吸着コレット5の吸引を停止して、自重により回収箱(図示せず)に回収する。
【0044】
貼り付け又は回収が終わったら、供給ステージ6に載置された別の結晶体について、上述の手順(2)〜(4)を繰り返すことで、所定の成長面をもつ結晶体D2のみを貼付ステージ7に貼り付けられる。このとき、モータ7mを介して貼付ステージ7を適宜移動させることで、複数の結晶体D2を所定間隔に整列してステージ7に貼り付けられる。供給ステージ6に載置された全ての結晶体について貼り付け又は回収が終わったら、フィーダ8により新たな結晶体D1をステージ6に載置して、上述の選別工程を繰り返す。
【0045】
[特徴点]
上記構成を具える選別装置の最も特徴とするところは、下方側照明1rとして、結晶体D1に対する透過率が70%未満である低透過性光源を用いたところにある。上述の選別工程の少なくとも上流の工程(載置方向検出工程)で用いられる下方側照明1rを低透過性光源とすることで、撮影画像から所望のデータの抽出をより確実に行え、次工程に進める結晶体数を増加することができる。つまり、供給テーブルに載置された複数の結晶体に対して、品質判定が行われる確率を高められるため、結果として、良品の回収率を高められる。更に、上方側照明2rも、結晶体に対する透過率が70%未満である低透過性光源とすることで、面積検出工程でも撮影画像からのデータの抽出をより確実に行え、品質判定が行われる結晶体数をより増加することができる。なお、位置検出用照明3rも結晶体に対する透過率が70%未満である低透過性光源としてもよい。
【0046】
[試験例1]
照明1r,2rとして、結晶体D1に対する透過率が70%未満である低透過性光源を具える装置(実施例1)と、同透過率が70%である光源を具える装置(比較例)とを作製して、これらの装置で結晶体を撮影し、得られた撮影画像及び良否判定率を調べた。
【0047】
実施例1の装置は、低透過性光源として、市販の青色LED(波長領域:460〜490nm、ピーク波長:470nm、Ib型ダイヤモンドに対する透過率:10%)を用いた。比較例は、光源として、市販のハロゲンランプ(波長領域:500〜850nm、ピーク波長:680nm、Ib型ダイヤモンドに対する透過率:70%)を用いた。
【0048】
図7,8は、載置方向検出工程において下方側照明1rを用いて上面カメラ1で撮像した画像の説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。図7は、実施例1を示し、図8は、比較例を示す。
【0049】
図8(I)に示すように、透過率が70%である光源を用いた比較例では、光源の光の一部が結晶体内を透過して上面カメラ1に入射されることで、結晶体の一部の面f1(特定の面)が灰色に見え(明るく見え)、光源の残りの光が供給ステージ6側に反射して上面カメラ1に入射されないことで、上記特定の面f1の周囲に存在する面f2が黒色に見える(暗く見える)。このような撮影画像を用いて二値化を行うと、図8(II)に示すように灰色に見える領域が全体外形を描く直線Lに及ぶ場合、図8(III)に示すように全体外形を描く直線が途中で途切れて、本来の輪郭像が得られないことがある。この場合、多角形の近似処理を行うための直線の抽出が適切にできない。従って、この結晶体は、所定の載置方向を向いているにも関わらず、所定の載置方向を向いていないと判定されることになる。
【0050】
これに対し、図7(I)に示すように、低透過性光源を用いた実施例1は、光源の光が供給ステージ6側に反射して、上面カメラ1に実質的に入射されないことから、結晶体の全面が黒色に見え(暗く見え)、輪郭が明確である。従って、図7(II)に示すように特定の面f1の領域が全体外形を描く直線Lに及ぶ場合であっても、図7(III)に示すように二値化像において直線Lが途切れず、輪郭像を確実に取得することができる。
【0051】
実施例1及び比較例において、供給テーブルに同じ1000個の結晶体をばら撒き、結晶体の載置方向の判定についての良否判定率(%)=(所定の載置方向であると判定された(良判定された)結晶体数/1000個)×100を求めた。その結果、比較例は、良否判定率が23%であるのに対し、低透過性光源を用いた実施例1は、良否判定率が25%と向上していた。
【0052】
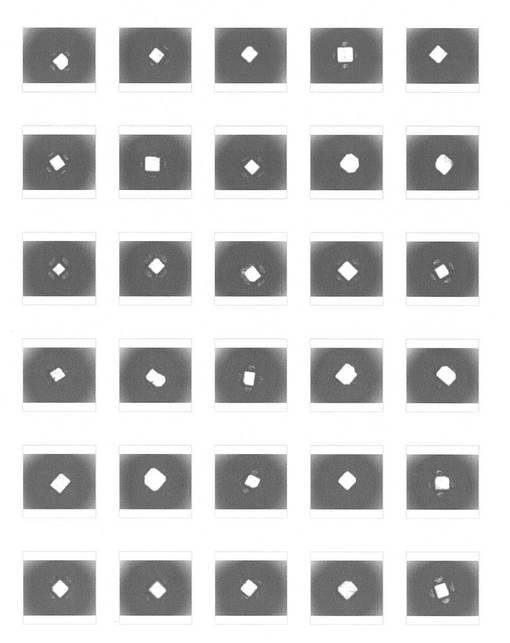
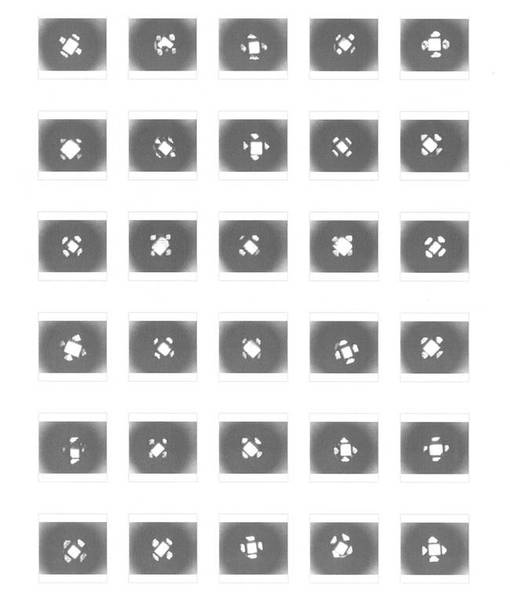
図9,10は、面積検出工程において上方側照明2rを用いて上面カメラ1で撮像した画像の説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。また、図11,12は、面積検出工程において上方側照明2rを用いて上面カメラ1で撮影した撮影画像を示す。図9,11は、実施例1を示し、図10,12は、比較例を示す。図9(II),図10(II)において、白い破線は、結晶体の全体外形の仮想線である。
【0053】
図10(I)に示すように、透過率が70%である光源を用いた比較例では、光源の光の一部が結晶体内を透過して、更に結晶体内で屈曲して結晶体内から出射して上面カメラ1に入射される。そのため、面積の検出を行う結晶体の特定の面f1だけでなく、その周囲に存在する面f2も白色(薄灰色)に見える(明るく見える)。このような撮影画像を用いて二値化を行うと、図10(II)に示すように周囲に存在する面f2が特定の面f1の輪郭を描く直線に及ぶ場合、図10(III)に示すように、特定の面f1とその周囲に存在する面f2とがくっついて一体となった二値化像が得られる。この場合、特定の面f1の輪郭をつくる直線の抽出が適切にできないことから、特定の面f1の面積が所定の大きさを満たすにも関わらず、所定の大きさを満たさないと判定されることになる。また、透過率が70%である光源を用いた比較例は、図12に示すように、上記特定の面f1とその周囲に存在する面f2との輝度差が小さい画像が撮影され易いことが分かる。
【0054】
これに対し、図9(I)に示すように、低透過性光源を用いた実施例1は、光源の光が結晶体に殆ど透過しないで反射する。このとき、上面カメラ1の光軸に直交する面(特定の面f1)以外の面(特定の面f1の周囲に存在する面f2)からの反射光は、上面カメラ1に入射され難い。そのため、結晶体の特定の面f1が白色に見え(明るく見え)、その周囲に存在する面f2が黒灰色に見える(暗く見える)。即ち、特定の面f1の輪郭が明確である。従って、図9(II)に示すように特定の面f1の周囲に存在する面f2が特定の面f1の輪郭を描く直線に及ぶ場合であっても、図9(III)に示すように二値化像において特定の面f1の輪郭を確実に取得することができる。また、低透過性光源を用いた実施例1は、図11に示すように、特定の面f1とその周囲に存在する面f2との輝度差が大きな画像が撮影され易いことが分かる。
【0055】
実施例1及び比較例において、所定の載置方向であると判定された結晶体に対して、結晶体の特定の面の面積の判定についての良否判定率(%)=(所定の大きさであると判定された(良判定された)結晶体数/比較例の装置によって所定の載置方向であると判定された約230個の結晶体)×100を求めた。その結果、比較例は、良否判定率が68%であるのに対し、低透過性光源を用いた実施例1は、良否判定率が80%と向上していた。
【0056】
更に、実施例1及び比較例について、特定の面の面積が所定の大きさであると判定された結晶体について、品質判定までを行い、良品と判定された個数を比較した。即ち、1000個のうち、最終的に貼付テーブルに貼付された結晶体の個数を比較した。その結果、比較例は、貼付された結晶体が79個であったのに対し、実施例1は貼付された結晶体が159個であり、比較例の約2倍であった。
【0057】
このように、選別工程の少なくとも上流の工程で用いられる下方側照明1rに低透過性光源を用いることで、撮影画像から所望のデータの抽出を確実に行えて、良否判定において良判定の割合を高められる。また、上方側照明2rも結晶体に対する透過率が70%未満である低透過性光源を用いることで、面積検出工程でも撮影画像から所望のデータの抽出を確実に行え、良否判定において良判定の割合を高められる。このように適切な照明を用いることで、結果として品質判定工程での良品の回収率の向上に寄与することができる。
【0058】
[試験例2]
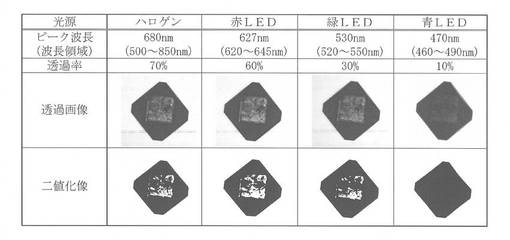
低透過性光源として、結晶体の透過率が異なる光源を用意し、試験例1と同様に載置方向検出工程において下方側照明にこれらの光源を用いて、上面カメラで撮影した画像を調べた。用いた光源の特性、及び各光源を用いて取得した画像を図13に示す。なお、二値化の閾値はいずれの光源についても等しくしている。
【0059】
結晶体の形状などによりばらつきがあるものの、図13の撮影画像(透過画像)に示すように、透過率が低いほど、結晶体内に存在する透過光領域(結晶体内に存在する明るく見える領域)が低減される傾向が認められる。特に、透過率が10%以下の場合、透過光領域が実質的に認められない。また、各撮影画像の二値化像に示されるように、透過率が低いほど上記透過光領域(二値化像における白い領域)が低減される傾向が認められる。特に、透過率が10%以下の場合、二値化像において上記透過光領域が存在しない。この試験から、結晶体の透過率が70%未満、特に60%以下、更に30%以下、取り分け10%以下の光源を用いると、結晶体の輪郭などを適切に抽出可能な画像を取得できることが分かる。
【0060】
(変形例)
実施形態1は、取得した撮影画像を二値化するにあたり、二値化の閾値を固定とし、得られた二値化像から、例えば、直線群の抽出を行い、直線のなす角度が所定の大きさを満たすか否かの判定を行う構成である。更に、角度の判定において所定の大きさを満たさないと判定された場合、上記固定値を初期値としておき、この初期値から二値化の閾値を変動させる構成とすると、角度が所定の大きさを満たすと判定される確率(良否判定における良判定の割合)を高められる。
【0061】
閾値の初期値、閾値の変動割合(変動量)、及び二値化から角度判定までの処理回数は、適宜設定することができる。変動割合が小さく、処理回数が多いほど、良判定の割合が高められるが、処理時間が長くなり、結果として効率の低下を招くため、所望の処理時間となる範囲で適宜設定することが好ましい。例えば、処理回数は、5〜20回程度が適切である。変動割合は、いずれの処理においても同じ量としてもよいし、異ならせてもよい。また、閾値は、輝度が低い部分を抽出し易いように低輝度側に変動させてもよいし、輝度が高い部分を抽出し易いように、高輝度側に変動させてもよい。画像に応じて変更することが好ましい。
【0062】
この二値化における閾値を変動させる処理は、載置方向検出工程で行うと、次の面積検出工程に進める結晶体の個数の増加に寄与することができる。すると、結果として品質判定工程に進める結晶体の個数の増加に寄与することができる。
【0063】
[試験例3]
上述した実施例1の装置に対して、載置方向検出工程において、二値化の閾値を初期値から変動させて、二値化から角度判定までの処理を最大20回繰り返すように載置方向判定部を構成した装置(変形例)を作製した。この変形例及び実施例1の装置について、良否判定率(%)(=(所定の載置方向であると判定された(良判定された)結晶体数/1000個)×100)を比較した。その結果、変形例は、良否判定率が84%であり、二値化から角度判定までの処理を1回だけ行う実施例1の装置と比較して良否判定率が飛躍的に向上していた。この理由は、閾値を変動させて直線の抽出をし直すことで、直線が精度よく抽出され、所定の角度を満たすと判定される結晶体数が増加したためであると考えられる。
【0064】
このように、特定の照明を具えることに加えて、判定方法(アルゴリズム)をも工夫することで、良否判定における良判定の割合を高められる。なお、面積検出工程や品質検出工程においても、二値化の閾値を初期値から変動させて、二値化から角度判定までの工程を複数回繰り返すように構成してもよい。
【0065】
(実施形態2)
吸着コレット5に保持された状態で品質判定を行い、不良と判定された結晶体D1(不良品)を回収する機構を別途設けると、当該結晶体を確実に回収できる。
【0066】
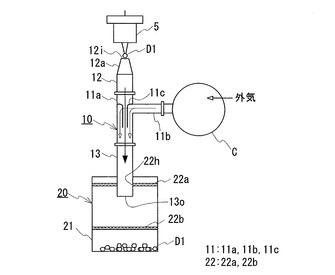
図14は、回収機構の概略構成図である。この回収機構は、吸着コレット5に保持された状態で品質判定を行った際、不良と判定された結晶体D1(不良品)を吸引する吸引手段(第一の吸引手段)と、吸引された不良品を回収する回収箱20(第一の回収箱)とを具える。
【0067】
吸引手段は、配管部10と、配管部10に接続される圧縮機Cとを具える。配管部10は、T字状の本体部11と、本体部11に接続される導入側配管部12及び排出側配管部13とを具える。
【0068】
本体部11は、直線状部11aと、直線状部11aの中間から分岐して、端部が圧縮機Cに接続された分岐部11bとを具える。本体部11の内部には、内部配管11cが配置されている。内部配管11cは、直線状部11aの内径よりも小さい短尺な管であり(但し、結晶体D1が通過可能な大きさを有する)、直線状部11aの内径に等しいフランジを導入側の開口部に具える。このフランジは、内部配管11cの軸方向と直交するように設けられており、直線状部11aと分岐部11bとの接続箇所に取り付けられている。この配置により、圧縮機Cの外気取込口(図示せず)から分岐部11bを通過した外気は、内部配管11cに接触して、流れる方向がほぼ90°変えられる。このような本体部11として市販のエアガンを利用することができる。
【0069】
導入側配管部12は、一方の開口部(吸引口12i)が結晶体D1の吸引に用いられ、他方の開口部が本体部11に接続される。この導入側配管部12は、一方の開口部側にテーパ部12aを具える。テーパ部12aは、吸引口12i側に向かって先細りしている。吸引口12iは、結晶体D1が十分に挿通可能な大きさである。排出側配管部13は、一方の開口部が本体部11に接続され、他方の開口部(排出口13i)が結晶体D1の排出に用いられる。この排出側配管部13は、導入側配管部12から本体部11を通過した結晶体D1を回収箱20に排出する。
【0070】
この吸引手段を用いて、結晶体D1を回収するには、以下のように行う。圧縮機Cを駆動して、白矢印で示すように分岐部11bから排出口13oに向かって外気を排出する。このとき、上述のように内部配管11cにより外気の流れる方向が変化することで、導入側配管部12の吸引口12i近傍が強制的に負圧になる。その結果、直線状部11a内には、吸引口12iから排出口13oに向かって外気が排出されるような外気の流れがつくられる。この外気の流れを利用して、結晶体D1を確実に回収箱20に回収することができる。特に、この吸引手段は、テーパ部12aを具えることで、吸引口12i近傍における外気の吸い込み速さ(流速)を大きくすることができ、結晶体D1をより確実に吸引できる。
【0071】
実施形態1で示した自重による回収では、吸着コレット5(図1)に結晶体D1がくっついたままになることがあった。この原因の一つとして、静電気や、吸着コレット5の吸着口に貼付テーブル7(図1)の糊が付着したことが考えられる。糊の付着は、例えば、良好な画像が取得されず、この画像を用いることで特定の面の面積の演算が適切に行われず、その結果、吸着コレット5が結晶体D1を貼付テーブル7に移送する際に結晶体D1を落下したことで、吸着コレット5の吸引口が貼付テーブル7に押し付けられて行われたと考えられる。吸着コレット5に結晶体D1がくっついたままであると、その次の結晶体D1を取り出せず、選別作業が停止してしまう。これに対し、上述のように吸引手段で結晶体D1を吸引して回収することで、選別作業の停止を低減することができる。
【0072】
なお、上述のように外気を導入して排出する経路と、結晶体を導入して排出する経路とにおいて、排出側が共通し、導入側が異なる吸引手段だけでなく、両経路が同一である吸引手段、例えば、一般的な掃除機のような吸引手段を用いることもできる。この場合、圧縮機と直線的に回収箱(結晶体を回収する空間)が設けられるため、出力が大きい圧縮機を用いることが好ましい。
【0073】
一方、回収箱20は、有底筒状の本体部21と、本体部21の深さ方向に並べて配置された複数の網部材22とを具える。網部材22は、本体部21の開口部側に配置される蓋用網部材22aと、蓋用網部材22aよりも深さ方向に下方の位置に、蓋用網部材22aから離間されて配置される流動規制用網部材22bとを具える。両網部材22a,22bはメッシュサイズが異なっている。蓋用網部材22aは、蓋として機能するように、即ち、回収した結晶体D1が回収箱20から飛散しないように、そのメッシュサイズが結晶体D1の外径よりも小さい。一方、流動規制用網部材22bは、回収した結晶体D1が回収箱20内の全体に亘って舞い上がらないように、回収箱20内における結晶体の流動範囲を規制するものであり、そのメッシュサイズが結晶体D1の外径よりも大きい。蓋用網部材22aは、その中央部に上記配管部10の排出側(排出側配管部13)が挿入できるように貫通孔22hが設けられている。貫通孔22hに排出側配管部13を挿入し、排出口13oが、両網部材22a,22bの中間に位置するように配管部10を配置している。
【0074】
蓋用網部材22aのメッシュサイズは、結晶体D1の外径に応じて適宜選択することができるが、結晶体D1の外径よりも若干小さい程度としておくと、排気抵抗を低減できて好ましい。流動規制用網部材22bのメッシュサイズも、結晶体D1の外径に応じて適宜選択することができるが、結晶体D1の外径よりも大き過ぎると、流動規制効果が小さい。
【0075】
なお、上記吸引手段に対して網部材22を設けない回収箱を用いることもできる。しかし、網部材22を具える回収箱20を用いることで、上記吸引手段の排気抵抗を低減できる上に、排気に伴う結晶体D1の飛散を防止でき、回収箱20に確実に回収できる。また、排気に伴う結晶体D1の舞い上がりを防止でき、結晶体D1が回収箱に衝突することになどよる騒音も抑制できる。
【0076】
[試験例4]
流動規制用網部材のメッシュサイズを変化させて、結晶体の舞い上がり状態を調べた。舞い上がり状態は、以下のように評価した。回収箱から10mm離れた位置において、排気時の音を騒音計で測定し、85dB以上の場合を×、85dB未満の場合を○と評価した。その結果を表1に示す。
【0077】
【表1】

【0078】
表1に示すように、結晶体D1の外径dよりも大きく、かつ4倍以下であれば、結晶体の舞い上がりが抑制できることが分かる。
【0079】
[試験例5]
上述した実施例1の装置に対して、実施形態2で述べた回収機構を具えた装置(実施例2)を作製した。この実施例2及び比較例の装置について、吸着コレットの吸着率(%)(=(吸着された結晶体数)/(特定の面の面積が所定の大きさである判定された結晶体数)×100)を比較した。その結果、比較例は、吸着率が46%であるのに対し、実施例2は吸着率が86%と2倍近くに向上していた。
【0080】
このように、特定の照明を具えることに加えて、不良品の回収方法をも工夫することで、品質判定が行われる結晶体数を増加することができ、結果として、良品の回収率を高められる。
【0081】
(実施形態3)
所定の載置方向ではないと判定された結晶体D1を回収する機構を別途設けると、当該結晶体を確実に回収できる。この回収機構は、載置方向判定部411により、所定の載置方向を向いていないと判定された結晶体D1を吸引する吸引手段(第二の吸引手段)と、吸引された結晶体D1を回収する回収箱(第二の回収箱)とを具える。
【0082】
吸引手段は、一端に吸引口を有する配管と、配管の他端に接続され、排気口を有する圧縮機とを具えたものが挙げられる。この吸引口と圧縮機との間に回収箱を配置する。即ち、配管の中間部に回収箱が存在する。回収箱と圧縮機との間には、結晶体が通過できず、かつ排気が可能な網部材を配置する。この構成により、圧縮機を駆動すると、吸引口から外気を吸い込み、排気口から排気される気流に乗せて、結晶体D1を吸引して回収箱に回収できる。このような回収機構は、一般的な掃除機と同様な構成のものが利用できる。或いは、吸引手段として、実施形態2で示した圧縮機の外気取込口から排気口までの経路と、配管部の吸引口から排気口までの経路とが同一ではなく部分的に共通する形状の配管を具えるものを利用してもよい。また、回収箱も、実施形態2で示した複数の網部材が配置された回収箱20を利用してもよい。
【0083】
所定の載置方向ではないと判定された結晶体D1は、載置方向の判定の際にたまたま所定の方向を向いていなかった場合があり得る。このような結晶体D1は、回収して、改めて供給ステージ6に載置させて、載置方向の判定を行うことが望まれる。ところが、本来回収されるべき結晶体が供給ステージ6に取り残されて、供給ステージ6に新たに載置された結晶体に混ざって搭載方向の判定が行われると、再度同じ載置状態で判定されるため、所定の載置方向でないと再び判定される。即ち、同じ判定が繰り返し行われるため、選別効率が低下する。これに対して、実施形態3で述べた回収機構を具えることで、回収されるべき結晶体D1が供給ステージ6に取り残されることを防止でき、選別効率を向上できる。
【0084】
なお、上述した実施形態は、本発明の要旨を逸脱することなく、適宜変更することが可能であり、上述した構成に限定されるものではない。例えば、位置検出用照明3は、結晶体に対する透過率が70%以上であるものを用いてもよい。また、例えば、複数の結晶体を供給ステージ上に適当にばら撒くことに代えて、各結晶体を所定の位置に整列させて、各位置データを予め演算処理装置に登録させておいてもよい。この場合、粗位置カメラ3や位置検出用照明3rを省略した装置とすることができる。
【産業上の利用可能性】
【0085】
本発明結晶体の選別装置は、温度差法といった結晶成長方法を行うに当たり、結晶体の成長面を判別するときに好適に利用することができる。
【図面の簡単な説明】
【0086】
【図1】実施形態1の選別装置の概略斜視図である。
【図2】供給テーブルに載置された各結晶体の粗位置を検出する工程を説明する説明図である。
【図3】供給テーブルに載置された各結晶体の載置方向を検出する工程を説明する説明図である。
【図4】供給テーブルに載置された各結晶体において特定の面を検査する工程を説明する説明図である。
【図5】(I)は、結晶体の斜視図、(II)は、この結晶体の(100)面を上面とした上面図(下面図)、(III)は、この結晶体の(111)面を上面とした上面図(下面図)である。
【図6】実施形態1の選別装置において、演算処理装置を中心に示す機能ブロック図である。
【図7】実施例1の選別装置に具える下方側照明を用いて上面カメラで撮像した画像を説明する説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。
【図8】比較例の選別装置に具える下方側照明を用いて上面カメラで撮像した画像を説明する説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。
【図9】実施例1の選別装置に具える上方側照明を用いて上面カメラで撮像した画像を説明する説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。
【図10】比較例の選別装置に具える上方側照明を用いて上面カメラで撮像した画像を説明する説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。
【図11】実施例1の選別装置に具える上方側照明を用いて上面カメラで撮像した撮影画像を示す。
【図12】比較例の選別装置に具える上方側照明を用いて上面カメラで撮像した撮影画像を示す。
【図13】透過率が異なる光源を下方側照明に用いて、上面カメラで撮影した画像及び二値化像、及び各光源の透過率を示す表である。
【図14】実施形態2の選別装置に具える回収機構の概略構成図である。
【符号の説明】
【0087】
1 上面カメラ 1r 下方側照明 1x 移動機構 1m モータ 1s スライダ
1b ボールねじ
2 下面カメラ 2r 上方側照明
3 粗位置カメラ 3r 位置検出用照明
4 演算処理装置 40 品質判定部 41 画像処理判定部 42 制御部
410 粗位置検出部 410a 二値化処理部 410b 重心演算部
411 載置方向判定部 411a 二値化処理部 411b 直線抽出部
411c 角度演算部 411d 角度判定部
412 面積検出部 412a 二値化処理部 412b 所定面抽出部
412c 面積演算部 412d 面積判定部
413 品質検出部 413a 画像データ抽出部 413b 二値化処理部
413c 輪郭抽出部
5 吸着コレット 5z 移動機構 5m モータ 5s スライダ
5b ボールねじ
6 供給ステージ 6t 供給テーブル 6m モータ 6s スライダ
6b ボールねじ
7 貼付ステージ 7t 貼付テーブル 7m モータ 7s スライダ
7b ボールねじ
8 フィーダ 8g ガイド
10 配管部 11 本体部 11a 直線状部 11b 分岐部 11c 内部配管
12 導入側配管部 12a テーパ部 12i 吸引口 13 排出側配管部
13o 排出口
20 回収箱 21 本体部 22 網部材 22a 蓋用網部材
22b 流動規制用網部材 22h 貫通孔
D,D1,D2 結晶体 D(100) 結晶体の(100)面 D(111) 結晶体の(111)面
C 圧縮機 f1 結晶体の特定の面
f2 結晶体の特定の面の周囲に存在する面 L 結晶体の全体外形を描く直線
【技術分野】
【0001】
本発明は、結晶体を自動的に選別する選別装置に関するものである。
【背景技術】
【0002】
従来、結晶体の製造方法として、成長面を有する種結晶を結晶成長させる方法が知られている。種結晶となる単結晶の粒の成長面は、例えば、特許文献1に記載される自動選別装置を利用すると容易に判別できる。
【0003】
上記自動選別装置は、複数の照明と、複数のカメラと、画像処理装置と、結晶粒を供給ステージから貼付ステージに移動する吸着コレットとを具える。この装置は、供給ステージ上にばら撒かれた結晶粒の撮像画像を画像処理し、この処理像を用いて成長面の欠陥の有無を判定し、良品を貼付ステージに移送し、不良品を回収箱に回収する。貼付ステージに載置された良品が種結晶に利用される。
【0004】
【特許文献1】特許第3646297号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
昨今、種結晶に使用可能である良好な結晶粒(良品)の回収率を高めて、生産効率を向上することが望まれている。しかし、従来は、良品の回収率を高めるための構成が十分に検討されていない。
【0006】
そこで、本発明の目的は、良好な結晶体の回収率を高められる結晶体の選別装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明者らが調べたところ、従来の装置では、良好な画像が取得できないことがあった。良好な画像、即ち、輝度差(明暗差(コントラスト比)が大きな画像)を取得するには、光量が大きい照明を用いることが好ましい。光量が大きな照明として、例えば、ハロゲンランプが挙げられる。しかし、ハロゲンランプを用いた撮影画像を調べたところ、結晶粒の全体外形(輪郭像)や所望の面の輪郭を適切に抽出できないことがあった。この原因の一つとして、ハロゲンランプの波長領域(一例として500〜900nm程度、ピーク波長680nm程度)において、結晶体(例えば、Ib型ダイヤモンド)に対する透過率が70%と高いことで、輝度差が大きな画像が得られ難くなることがある、と考えられる。そこで、結晶体に対する透過率が低い光源を利用したところ、輝度差が大きな画像が取得し易くなり、結果として良品の回収率を向上できた。本発明は、これらの知見に基づくものであり、良好な画像を取得し易くするために特定の照明を具える。
【0008】
具体的には、本発明結晶体の選別装置は、照明で照らした結晶体をカメラで撮影し、得られた画像を用いて判定部が結晶体の品質の良否を判定するものであり、上記照明として、結晶体に対する透過率が70%未満である低透過性光源を具えることを特徴とする。
【0009】
低透過性光源の透過率は、選別対象である結晶体の物性に応じて選択することができる。透過率が低いほど、輝度差が大きい画像を取得し易い傾向にあるため、透過率は低いほど好ましく、60%以下、特に30%以下が好ましい。更に、透過率が10%であると、輝度差が大きな画像が得られることから、透過率は10%以下がより好ましい。
【0010】
上記低透過性光源は、所望の透過率が得られるような波長領域のものを種々利用できる。例えば、赤外線領域、可視光線領域(下限波長:360〜400nm程度、上限波長:760〜830nm程度)、及び紫外線領域のいずれかを利用できる。可視光線領域の波長の光源を用いると、作業者が視覚的に確認することができる。特に、可視光領域において500nm未満といった短波長域では結晶体の透過率が低く好ましい。
【0011】
本発明選別装置の選別対象である結晶体は、任意に選択することができる。例えば、ダイヤモンド、cBN、ルチル、サファイア、MgO、ZnSeなどが挙げられる。
【0012】
本発明装置は、低透過性光源を用いて撮影した画像を二値化する二値化処理部と、この二値化処理部により二値化された二値化像をハフ変換して直線成分を抽出する直線抽出部と、この直線抽出部により抽出された複数の直線成分がなす角を演算する角度演算部と、この角度演算部により演算された角度が所定の大きさか否かを判定する角度判定部とを具える構成が好ましい。特に、上記演算された角度が所定の大きさでないと判定されたとき、上記二値化処理部は、二値化の閾値を変化させて二値化像を取得し、上記直線抽出部は、新たに取得した二値化像から直線成分の抽出を行い、上記角度判定部は、新たに抽出された直線成分がなす角が所定の大きさか否かを判定する構成とすることが好ましい。
【0013】
結晶体の品質の良否判定にあたり、撮影画像をそのまま用いるよりも、二値化した二値化像を利用すると、結晶体の形状や大きさを精度よく検出できる。このとき、二値化の閾値を固定値とし、二値化から角度判定までの処理を1回としてもよいが、1回目の角度判定で所定の角度で無いと判定された結晶体に対し、閾値を初期値から変動させて、二値化から角度判定までの処理を複数回繰り返す構成とすると、1回の撮影で得られた画像に対して、所定の角度を満たすと判定される結晶体数を増加することができる。従って、この構成によれば、結晶体の形状や大きさを高精度に検出できる上に、結果として良好な結晶体の回収率を高められる。
【0014】
本発明装置は、検査台に載置された複数の結晶体から、一つの結晶体を取り出して保持する保持手段と、この保持手段に保持された結晶体の良否を判定部が判定したとき、不良と判定された不良品を回収する回収箱(第一の回収箱)と、保持手段に保持された不良品を回収箱内に収集するために吸引する吸引手段(第一の吸引手段)とを具える構成とすることが好ましい。
【0015】
この構成によれば、保持手段で保持された一つの結晶体の良否判定を確実に行える。また、この構成は、吸引手段で強制的に不良品を吸引して、不良品を保持手段から回収箱に収めるため、例えば、保持手段が不良品を離して不良品の自重により回収箱に収める構成と比較して、不良品を回収箱に確実に回収できる。
【0016】
本発明装置は、検査台に載置された複数の結晶体において、各結晶体が所定の載置方向を向いているか否かを判定する載置方向判定部と、この載置方向判定部により、所定の載置方向を向いていないと判定された結晶体を回収する回収箱(第二の回収箱)と、当該結晶体を上記検査台から第二の回収箱に収集するために吸引する吸引手段(第二の吸引手段)を具える構成とすることが好ましい。
【0017】
結晶体の品質の良否判定の予備工程として、検査台に載置した状態で結晶体が所定の条件を満たすか否かを判定する場合、所定の条件を満たしていないと判定された結晶体を検査台から回収するにあたり、上記吸引手段を用いることで、回収対象となった結晶体を回収箱に確実に収集でき、回収対象となった結晶体が検査台に取り残されることを防止できる。
【0018】
結晶体を回収する上記回収箱は、メッシュサイズの異なる網部材が回収箱の深さ方向に並べて配置されたものが好ましい。上記網部材は、メッシュサイズが結晶体の外径よりも小さい蓋用網部材と、メッシュサイズが結晶体の外径よりも大きく、かつ結晶体の外径の4倍以下である流動規制用網部材とを具えるものが好ましい。この流動規制用網部材は、上記蓋用網部材よりも回収箱の深さ方向の下方に蓋用網部材から離間して配置されて、回収箱内で結晶体が流動する範囲を規制する構成とすることが好ましい。
【0019】
上述の吸引手段により吸引して回収箱に結晶体を回収する場合、回収箱への排気により、回収箱内で結晶体が舞い上がったり、回収箱の内周面や結晶体同士が衝突して騒音が生じることが考えられる。これに対し、メッシュサイズが細かい網部材を蓋として利用することで、結晶体が回収箱外に飛散することを防止できる上に、回収箱内にメッシュサイズが大きい網部材を仕切りとして利用することで上記舞い上がりを抑制し、回収箱内における結晶体の流動範囲を規制することができる。かつ、これら蓋や仕切りが網部材からなるため、排気を十分に行える。
【発明の効果】
【0020】
本発明結晶体の選別装置によれば、所定の結晶体の選別を自動的に行えると共に、良好な結晶体の回収率が高い。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照して本発明選別装置を詳細に説明する。
(実施形態1)
ここでは、供給ステージ(検査台)に載置した多数の結晶体から、所定の条件を満たす良好な結晶体を選別し、選別された結晶体を貼付ステージに貼り付ける場合について説明する。特に、結晶体をIb型ダイヤモンドとし、所定の大きさの成長面を有する結晶体を種結晶として選別する場合を例とする。図1は、本発明選別装置の概略斜視図、図2〜4は、選別工程の説明図であり、図2は、結晶体の粗位置検出工程、図3は、結晶体の載置方向検出工程、図4は、結晶体の特定の面の面積検出工程を示し、図6は、演算処理装置を中心に示す本発明選別装置の機能ブロック図である。なお、図2〜4に示す破線は、照明からの光を模式的に示す。また、図面において同一符号は同一物を示す。
【0022】
まず、装置の概略構成、次に、この装置を用いた結晶体の選別手順を説明し、最後に、本発明選別装置の特徴点を説明する。
【0023】
[全体構成]
この装置の基本的構成は、特許文献1に示す装置と同様であり、3台のカメラ1,2,3と、3つの照明1r,2r,3rと、カメラによる撮影画像を用いて結晶体の品質の良否を判定する判定部40(以下、品質判定部と呼ぶ、図6)を有する演算処理装置4(図6)とを主な構成とする。更に、この装置は、一つの結晶体D1を保持する吸着コレット5(保持手段)と、結晶体D1が載置される供給ステージ6と、品質判定部40により良品と判定された結晶体D2が貼付される貼付ステージ7とを具える。
【0024】
カメラ1(以下、上面カメラと呼ぶ)は、供給ステージ6に載置された複数の結晶体D1のうち、一つの結晶体を上面から撮像できるように、供給ステージ6の上方に配置され、上記結晶体D1の上面画像の取得に用いられる。カメラ2(以下、下面カメラと呼ぶ)は、吸着コレット5に保持された結晶体D1を下面から撮影できるように配置され、上記結晶体D1の下面画像の取得に用いられる。カメラ3(以下、粗位置カメラと呼ぶ)は、供給ステージ6に載置された複数の結晶体D1を上面から撮影できるように、結晶体D1の上方に配置され、各結晶体D1の粗位置を検出するための上面画像の取得に用いられる。
【0025】
カメラ1〜3はいずれもCCDカメラなどが好適に利用できる。上面カメラ1は、移動機構1xによってX軸方向に移動可能である。下面カメラ2には、このカメラ2の光軸と同軸の落射照明(図示せず)と、偏光フィルタ(図示せず)とを具え、結晶体からの所定の光成分のみを抽出した画像を取得できる。カメラ2,3も移動機構(図示せず)を具える。
【0026】
照明1r(以下、下方側照明と呼ぶ)は、供給ステージ6が配置されるスライダ6sに内蔵され、供給ステージ6に載置された結晶体D1を下方から照らす透過照明であり、上面カメラ1による撮影の際に用いられる。照明2r(以下、上方側照明と呼ぶ)は、上面カメラ1に取り付けられ、上面カメラ1の光軸と同軸の落射照明である。この上方側照明2rは、供給ステージ6に載置された結晶体D1を上方から照らし、上面カメラ1による撮影の際に用いられる。照明3r(以下、位置検出用照明と呼ぶ)も下方側照明1rと同様にスライダ6sに内蔵され、供給ステージ6に載置された結晶体D1を下方から照らす透過照明であり、粗位置カメラ3による撮影の際に用いられる。
【0027】
吸着コレット5は、吸引機構(図示せず)により結晶体D1を吸着して供給ステージ6から貼付ステージ7に搬送する保持具である。この吸着コレット5は、上面カメラ1の移動機構1xによりX軸方向に移動可能であると共に、移動機構5zによりZ軸方向に移動可能である。移動機構1x,5zは、モータ1m,5mでボールねじ1b,5bを回転させ、このボールねじ1b,5bに螺合されたスライダ1s,5sを各ボールねじ1b,5bの軸方向に移動させて、上面カメラ1や吸着コレット5を移動させる。
【0028】
各ステージ6,7は、供給テーブル6t,貼付テーブル7tに具えるスライダ6s,7sに載置される。供給ステージ6は、選別前の結晶体D1が載置され、貼付ステージ7には選別後の結晶体D2(良品)が貼り付けられる。供給ステージ6には、ガイド8gが接続されたフィーダ8が設けられる。フィーダ8は、ガイド8gを介して供給ステージ6上に結晶体D1を供給する。各テーブル6t,7tは、各ステージ6,7の移動機構を具える。この移動機構は、上述のカメラなどの移動機構1x,5zと同様の構成である。即ち、モータ6m,7mがボールねじ6b,7bを回転させることで、このボールねじ6b,7bに螺合されたスライダ6s,7sを各ボールねじ6b,7bの軸方向(Y軸方向)に移動させる。その結果、各ステージ6,7が移動する。
【0029】
演算処理装置4は、図6に示すように各カメラ1,2,3が取得した画像を処理し、種々の演算や判定を行う画像処理判定部41と、各構成部材の移動機構・カメラ1,2,3・照明1r,2r,3r・吸着コレット5・フィーダ8などの各構成部材の動作を制御する制御部42とを具える。このような演算処理装置は、汎用のパーソナルコンピュータが利用できる。演算処理装置4には、取得した画像や選別結果を表示可能なモニタ(図示せず)を接続させており、モニタの制御も上記制御部42が行う。
【0030】
画像処理判定部41は、粗位置カメラ3から取得した画像を処理して各結晶体の粗位置を検出する粗位置検出部410と、上面カメラ1から取得した画像を処理して各結晶体の載置方向を検出する載置方向判定部411と、上面カメラ1から取得した画像を処理して各結晶体の特定の面の面積を検出する面積検出部412と、品質判定部40を有する品質検出部413と、種々のデータを記憶する記憶部(図示せず)とを具える。各検出部410,412,413や判定部411の詳細は、選別手順と共に後述する。
【0031】
[選別手順]
上記構成を具える選別装置は、以下の手順により、複数の結晶体D1から特定の結晶体D2を自動的に選別する。各種の処理には、図6を参照する。
【0032】
(1)結晶体D1の粗位置検出(図2参照)
フィーダ8(図1)からガイド8gを介して供給ステージ6上に結晶体D1(種結晶)をばら撒き、供給ステージ6の下方から位置検出用照明3rで照らした状態で、粗位置カメラ3で複数の結晶体D1を撮影する。取得した撮影画像を、演算処理装置4に具える画像処理判定部41の粗位置検出部410に取り込んで二値化処理部410aで二値化する。重心演算部410bは、得られた二値化像を基に各結晶体の重心を演算する。得られた重心の位置データに基づいて、制御部42は、モータ1mやモータ6mを駆動させて上面カメラ1や供給ステージ6を移動させ、上面カメラ1が一つの結晶体D1を撮影できるように、上面カメラ1の位置を制御する。
【0033】
(2)結晶体D1の載置方向検出(図3参照)
次に、粗位置カメラ3から上面カメラ1に、位置検出用照明3rを下方側照明1rに切り換えて、上面カメラ1で一つの結晶体D1を撮影する。得られた撮影画像(上面投影画像)を、演算処理装置4に具える画像処理判定部41の載置方向判定部411に取り込む。載置方向判定部411は、二値化処理部411aで撮影画像を二値化した後、得られた二値化像から結晶体の輪郭点を抽出し、この輪郭点のデータから結晶体の全体外形(輪郭像)をつくる各直線のなす角度を求める。具体的には、直線抽出部411bは、抽出された輪郭点から直線成分を抽出するためにハフ変換を行って輪郭像をつくる直線群を抽出し、抽出した直線群から直線成分の交点を求め、この交点がつくる図形を多角形の輪郭像に近似する。そして、角度演算部411cは、上記近似処理により直線成分のなす角度を求め、角度判定部411dは、求めた角度と、予め設定した所定の角度とを照合し、求めた角度が所定の角度であるか否かを判定する。載置方向判定部411は、この判定結果から、撮影した結晶体D1の載置方向を特定する。
【0034】
例えば、結晶体Dが図5に示すようなダイヤモンドである場合、(100)面D(100)を上面として結晶体Dを載置して上方から見ると、その輪郭像は、図5(II)に示すようにn角形状(n=4〜8、ここではn=4の正方形状)に見える。(111)面D(111)を上面として結晶体Dを載置して上方から見ると、その輪郭像は、図5(III)に示すように六角形状に見える。前者の場合、輪郭像をつくる直線がなす幾何学的理論値はn=4のとき90°(その他、例えばn=8のとき135°)である。後者の場合、120°である。従って、所定の角度として、所望の幾何学的理論値を設定して、予め記憶部に登録しておき、角度演算部411cにより演算された角度が記憶部から呼び出した値を満たすか否か(適合するか否か)を角度判定部411dで判定することで、載置方向判定部411は、結晶体の載置方向を特定できる。
【0035】
結晶体の載置方向が所定の方向である場合、次の面積検出を行う。結晶体の載置方向が所定の方向でない場合、その結晶体を供給ステージ6から回収し、別の結晶体の載置方向を検出するために、上面カメラ1や供給ステージ6を移動する。以下、供給ステージ6に載置された全ての結晶体D1について、載置方向の検出を行う。供給ステージ6からの結晶体D1の回収は、供給ステージ6上の全ての結晶体D1について一連の検出が終わってからまとめて行う。各工程ごとに逐次、結晶体の回収を行ってもよい。
【0036】
(3)結晶体D1の特定の面の面積検出(図4参照)
次に、下方側照明1rを上方側照明2rに切り換えて、載置方向が所定の方向であると判定された結晶体D1を再度上面カメラ1で撮影する。得られた撮影画像(上面反射画像)を演算処理装置4に具える画像処理判定部41の面積検出部412に取り込み、二値化処理部412aで二値化する。その後、所定面抽出部412bは、上述の全体外形(輪郭像)を取得する場合と同様の手法でハフ変換及び近似処理を利用して、二値化像から特定の面を抽出する。例えば、結晶体がダイヤモンドである場合、各面の輪郭をつくる直線がなす幾何学的理論値が決まっている(例えば、(100)面の場合:45°,90°,135°、(111)面の場合:60°,120°)。そのため、上述したように所望の幾何学的理論値を予め記憶部に登録して照合できるようにしておき、抽出した直線成分のなす角度が所定の角度であるか否かを判定することで、特定の面か否かを判別できる。抽出された特定の面について、面積演算部412cは、面積を演算する。そして、面積判定部412dは、予め設定して記憶部に登録しておいた所定の値(面積閾値)を呼び出し、演算された面積が面積閾値を満たすか否かを判定する。
【0037】
結晶体の特定の面の面積が所定の大きさである場合、次の品質判定を行うために当該結晶体を吸着コレット5で取り出す。このとき、演算処理装置4は、上面カメラ1を利用して得られた輪郭像の重心を演算して結晶体の正確な位置データを求め、この重心と上面カメラ1の画面の中心(光軸)とが一致するように位置データを修正し、この修正された位置データに基づき、吸着コレット5を移動させる。
【0038】
結晶体の特定の面の面積が所定の大きさでない場合、その結晶体を供給ステージ6から回収し、別の結晶体の載置方向や面積を検出するために、上面カメラ1や供給ステージ6を移動する。以下、供給ステージ6に載置された全ての結晶体D1について、載置方向の検出を行い、所定の載置方向である結晶体D1について特定の面の面積の検出を行うことを繰り返す。
【0039】
上記(2),(3)を品質判定の予備工程として行う。このような予備工程を具えることで、品質判定を行う結晶体数を低減する(絞る)ことができ、複数の結晶体の中から良好な結晶体を効率よく選別することができる。
【0040】
(4)結晶体D1の品質判定(図1参照)
次に、吸着コレット5で保持した結晶体D1の直下に下面カメラ2を移動させて、結晶体D1の下方画像を取得し、下面の品質を判定する。撮影手法は、特許文献1に記載されるような下面カメラ2の光軸と同軸の落射照明と、偏光フィルタとを用いた方法が利用できる。具体的には、偏光フィルタの偏光特性を用いない像(ここでは、上述の面積を演算した特定の面の対向面の像)と、用いた像(ここでは、同対向面の周囲に存在する面(対向面以外の面)の像)とをそれぞれ下面カメラ2で撮影する。得られた二つの下方画像を演算処理装置4に具える画像処理判定部41の画像データ抽出部413aに取り込む。画像データ抽出部413aは、両下方画像について画像データ間の演算により両像の差分を求めることで、下面カメラ2の光軸(又は光軸と平行な直線)と実質的に直交する結晶面のみの画像を抽出する。
【0041】
抽出された結晶面の画像を二値化処理部413bで二値化する。輪郭抽出部413cは、得られた二値化像から、上述の全体外形(輪郭像)を取得する場合と同様の手法、即ち、ハフ変換及び近似処理を利用して、輪郭データの抽出を行う。得られた輪郭データを用いて品質判定部40は、抽出された結晶面に欠けなどの欠陥が有るか否かを判定する。例えば、この結晶面に欠けが存在すると、欠け部分は落射光を反射しない。従って、演算処理装置4は、上述した特定の面の輪郭像と抽出された結晶面の像において各々の重心を演算し、両者に一定値以上の乖離を生じれば結晶面に欠けがあると判定することができる。
【0042】
上記判定の結果、抽出された結晶面に欠陥が無いと判断された結晶体(良品)を吸着コレット5でX軸方向に搬送し、更にZ軸方向に下降させて貼付ステージ7に貼り付ける。この搬送は、予め設定した結晶体の貼り付け位置データに基づいて制御すればよい。
【0043】
抽出された結晶面に欠陥が有ると判断された結晶体(不良品)は、吸着コレット5の吸引を停止して、自重により回収箱(図示せず)に回収する。
【0044】
貼り付け又は回収が終わったら、供給ステージ6に載置された別の結晶体について、上述の手順(2)〜(4)を繰り返すことで、所定の成長面をもつ結晶体D2のみを貼付ステージ7に貼り付けられる。このとき、モータ7mを介して貼付ステージ7を適宜移動させることで、複数の結晶体D2を所定間隔に整列してステージ7に貼り付けられる。供給ステージ6に載置された全ての結晶体について貼り付け又は回収が終わったら、フィーダ8により新たな結晶体D1をステージ6に載置して、上述の選別工程を繰り返す。
【0045】
[特徴点]
上記構成を具える選別装置の最も特徴とするところは、下方側照明1rとして、結晶体D1に対する透過率が70%未満である低透過性光源を用いたところにある。上述の選別工程の少なくとも上流の工程(載置方向検出工程)で用いられる下方側照明1rを低透過性光源とすることで、撮影画像から所望のデータの抽出をより確実に行え、次工程に進める結晶体数を増加することができる。つまり、供給テーブルに載置された複数の結晶体に対して、品質判定が行われる確率を高められるため、結果として、良品の回収率を高められる。更に、上方側照明2rも、結晶体に対する透過率が70%未満である低透過性光源とすることで、面積検出工程でも撮影画像からのデータの抽出をより確実に行え、品質判定が行われる結晶体数をより増加することができる。なお、位置検出用照明3rも結晶体に対する透過率が70%未満である低透過性光源としてもよい。
【0046】
[試験例1]
照明1r,2rとして、結晶体D1に対する透過率が70%未満である低透過性光源を具える装置(実施例1)と、同透過率が70%である光源を具える装置(比較例)とを作製して、これらの装置で結晶体を撮影し、得られた撮影画像及び良否判定率を調べた。
【0047】
実施例1の装置は、低透過性光源として、市販の青色LED(波長領域:460〜490nm、ピーク波長:470nm、Ib型ダイヤモンドに対する透過率:10%)を用いた。比較例は、光源として、市販のハロゲンランプ(波長領域:500〜850nm、ピーク波長:680nm、Ib型ダイヤモンドに対する透過率:70%)を用いた。
【0048】
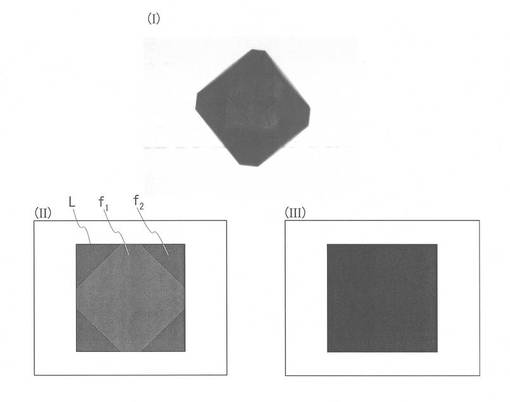
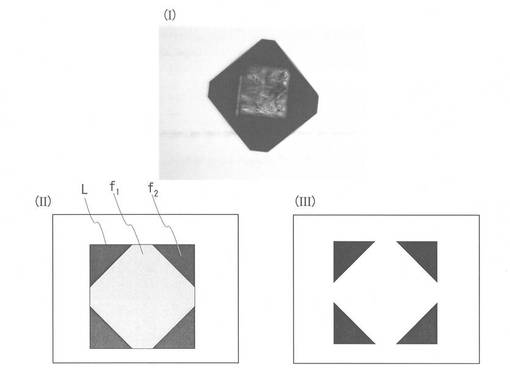
図7,8は、載置方向検出工程において下方側照明1rを用いて上面カメラ1で撮像した画像の説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。図7は、実施例1を示し、図8は、比較例を示す。
【0049】
図8(I)に示すように、透過率が70%である光源を用いた比較例では、光源の光の一部が結晶体内を透過して上面カメラ1に入射されることで、結晶体の一部の面f1(特定の面)が灰色に見え(明るく見え)、光源の残りの光が供給ステージ6側に反射して上面カメラ1に入射されないことで、上記特定の面f1の周囲に存在する面f2が黒色に見える(暗く見える)。このような撮影画像を用いて二値化を行うと、図8(II)に示すように灰色に見える領域が全体外形を描く直線Lに及ぶ場合、図8(III)に示すように全体外形を描く直線が途中で途切れて、本来の輪郭像が得られないことがある。この場合、多角形の近似処理を行うための直線の抽出が適切にできない。従って、この結晶体は、所定の載置方向を向いているにも関わらず、所定の載置方向を向いていないと判定されることになる。
【0050】
これに対し、図7(I)に示すように、低透過性光源を用いた実施例1は、光源の光が供給ステージ6側に反射して、上面カメラ1に実質的に入射されないことから、結晶体の全面が黒色に見え(暗く見え)、輪郭が明確である。従って、図7(II)に示すように特定の面f1の領域が全体外形を描く直線Lに及ぶ場合であっても、図7(III)に示すように二値化像において直線Lが途切れず、輪郭像を確実に取得することができる。
【0051】
実施例1及び比較例において、供給テーブルに同じ1000個の結晶体をばら撒き、結晶体の載置方向の判定についての良否判定率(%)=(所定の載置方向であると判定された(良判定された)結晶体数/1000個)×100を求めた。その結果、比較例は、良否判定率が23%であるのに対し、低透過性光源を用いた実施例1は、良否判定率が25%と向上していた。
【0052】
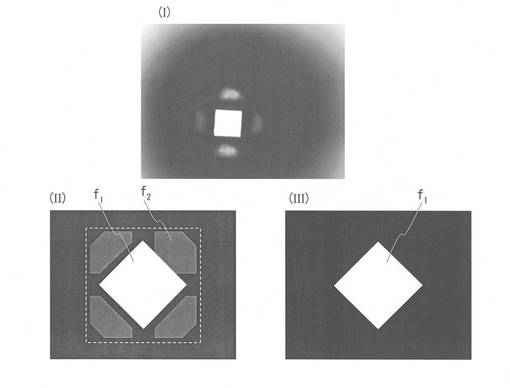
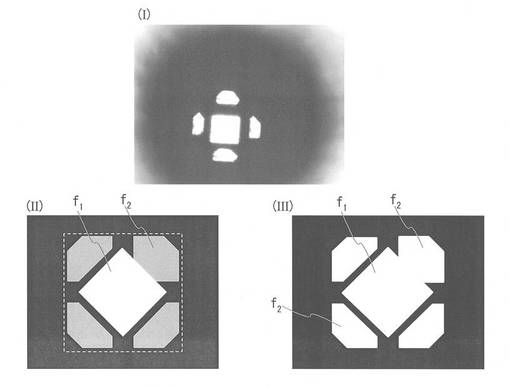
図9,10は、面積検出工程において上方側照明2rを用いて上面カメラ1で撮像した画像の説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。また、図11,12は、面積検出工程において上方側照明2rを用いて上面カメラ1で撮影した撮影画像を示す。図9,11は、実施例1を示し、図10,12は、比較例を示す。図9(II),図10(II)において、白い破線は、結晶体の全体外形の仮想線である。
【0053】
図10(I)に示すように、透過率が70%である光源を用いた比較例では、光源の光の一部が結晶体内を透過して、更に結晶体内で屈曲して結晶体内から出射して上面カメラ1に入射される。そのため、面積の検出を行う結晶体の特定の面f1だけでなく、その周囲に存在する面f2も白色(薄灰色)に見える(明るく見える)。このような撮影画像を用いて二値化を行うと、図10(II)に示すように周囲に存在する面f2が特定の面f1の輪郭を描く直線に及ぶ場合、図10(III)に示すように、特定の面f1とその周囲に存在する面f2とがくっついて一体となった二値化像が得られる。この場合、特定の面f1の輪郭をつくる直線の抽出が適切にできないことから、特定の面f1の面積が所定の大きさを満たすにも関わらず、所定の大きさを満たさないと判定されることになる。また、透過率が70%である光源を用いた比較例は、図12に示すように、上記特定の面f1とその周囲に存在する面f2との輝度差が小さい画像が撮影され易いことが分かる。
【0054】
これに対し、図9(I)に示すように、低透過性光源を用いた実施例1は、光源の光が結晶体に殆ど透過しないで反射する。このとき、上面カメラ1の光軸に直交する面(特定の面f1)以外の面(特定の面f1の周囲に存在する面f2)からの反射光は、上面カメラ1に入射され難い。そのため、結晶体の特定の面f1が白色に見え(明るく見え)、その周囲に存在する面f2が黒灰色に見える(暗く見える)。即ち、特定の面f1の輪郭が明確である。従って、図9(II)に示すように特定の面f1の周囲に存在する面f2が特定の面f1の輪郭を描く直線に及ぶ場合であっても、図9(III)に示すように二値化像において特定の面f1の輪郭を確実に取得することができる。また、低透過性光源を用いた実施例1は、図11に示すように、特定の面f1とその周囲に存在する面f2との輝度差が大きな画像が撮影され易いことが分かる。
【0055】
実施例1及び比較例において、所定の載置方向であると判定された結晶体に対して、結晶体の特定の面の面積の判定についての良否判定率(%)=(所定の大きさであると判定された(良判定された)結晶体数/比較例の装置によって所定の載置方向であると判定された約230個の結晶体)×100を求めた。その結果、比較例は、良否判定率が68%であるのに対し、低透過性光源を用いた実施例1は、良否判定率が80%と向上していた。
【0056】
更に、実施例1及び比較例について、特定の面の面積が所定の大きさであると判定された結晶体について、品質判定までを行い、良品と判定された個数を比較した。即ち、1000個のうち、最終的に貼付テーブルに貼付された結晶体の個数を比較した。その結果、比較例は、貼付された結晶体が79個であったのに対し、実施例1は貼付された結晶体が159個であり、比較例の約2倍であった。
【0057】
このように、選別工程の少なくとも上流の工程で用いられる下方側照明1rに低透過性光源を用いることで、撮影画像から所望のデータの抽出を確実に行えて、良否判定において良判定の割合を高められる。また、上方側照明2rも結晶体に対する透過率が70%未満である低透過性光源を用いることで、面積検出工程でも撮影画像から所望のデータの抽出を確実に行え、良否判定において良判定の割合を高められる。このように適切な照明を用いることで、結果として品質判定工程での良品の回収率の向上に寄与することができる。
【0058】
[試験例2]
低透過性光源として、結晶体の透過率が異なる光源を用意し、試験例1と同様に載置方向検出工程において下方側照明にこれらの光源を用いて、上面カメラで撮影した画像を調べた。用いた光源の特性、及び各光源を用いて取得した画像を図13に示す。なお、二値化の閾値はいずれの光源についても等しくしている。
【0059】
結晶体の形状などによりばらつきがあるものの、図13の撮影画像(透過画像)に示すように、透過率が低いほど、結晶体内に存在する透過光領域(結晶体内に存在する明るく見える領域)が低減される傾向が認められる。特に、透過率が10%以下の場合、透過光領域が実質的に認められない。また、各撮影画像の二値化像に示されるように、透過率が低いほど上記透過光領域(二値化像における白い領域)が低減される傾向が認められる。特に、透過率が10%以下の場合、二値化像において上記透過光領域が存在しない。この試験から、結晶体の透過率が70%未満、特に60%以下、更に30%以下、取り分け10%以下の光源を用いると、結晶体の輪郭などを適切に抽出可能な画像を取得できることが分かる。
【0060】
(変形例)
実施形態1は、取得した撮影画像を二値化するにあたり、二値化の閾値を固定とし、得られた二値化像から、例えば、直線群の抽出を行い、直線のなす角度が所定の大きさを満たすか否かの判定を行う構成である。更に、角度の判定において所定の大きさを満たさないと判定された場合、上記固定値を初期値としておき、この初期値から二値化の閾値を変動させる構成とすると、角度が所定の大きさを満たすと判定される確率(良否判定における良判定の割合)を高められる。
【0061】
閾値の初期値、閾値の変動割合(変動量)、及び二値化から角度判定までの処理回数は、適宜設定することができる。変動割合が小さく、処理回数が多いほど、良判定の割合が高められるが、処理時間が長くなり、結果として効率の低下を招くため、所望の処理時間となる範囲で適宜設定することが好ましい。例えば、処理回数は、5〜20回程度が適切である。変動割合は、いずれの処理においても同じ量としてもよいし、異ならせてもよい。また、閾値は、輝度が低い部分を抽出し易いように低輝度側に変動させてもよいし、輝度が高い部分を抽出し易いように、高輝度側に変動させてもよい。画像に応じて変更することが好ましい。
【0062】
この二値化における閾値を変動させる処理は、載置方向検出工程で行うと、次の面積検出工程に進める結晶体の個数の増加に寄与することができる。すると、結果として品質判定工程に進める結晶体の個数の増加に寄与することができる。
【0063】
[試験例3]
上述した実施例1の装置に対して、載置方向検出工程において、二値化の閾値を初期値から変動させて、二値化から角度判定までの処理を最大20回繰り返すように載置方向判定部を構成した装置(変形例)を作製した。この変形例及び実施例1の装置について、良否判定率(%)(=(所定の載置方向であると判定された(良判定された)結晶体数/1000個)×100)を比較した。その結果、変形例は、良否判定率が84%であり、二値化から角度判定までの処理を1回だけ行う実施例1の装置と比較して良否判定率が飛躍的に向上していた。この理由は、閾値を変動させて直線の抽出をし直すことで、直線が精度よく抽出され、所定の角度を満たすと判定される結晶体数が増加したためであると考えられる。
【0064】
このように、特定の照明を具えることに加えて、判定方法(アルゴリズム)をも工夫することで、良否判定における良判定の割合を高められる。なお、面積検出工程や品質検出工程においても、二値化の閾値を初期値から変動させて、二値化から角度判定までの工程を複数回繰り返すように構成してもよい。
【0065】
(実施形態2)
吸着コレット5に保持された状態で品質判定を行い、不良と判定された結晶体D1(不良品)を回収する機構を別途設けると、当該結晶体を確実に回収できる。
【0066】
図14は、回収機構の概略構成図である。この回収機構は、吸着コレット5に保持された状態で品質判定を行った際、不良と判定された結晶体D1(不良品)を吸引する吸引手段(第一の吸引手段)と、吸引された不良品を回収する回収箱20(第一の回収箱)とを具える。
【0067】
吸引手段は、配管部10と、配管部10に接続される圧縮機Cとを具える。配管部10は、T字状の本体部11と、本体部11に接続される導入側配管部12及び排出側配管部13とを具える。
【0068】
本体部11は、直線状部11aと、直線状部11aの中間から分岐して、端部が圧縮機Cに接続された分岐部11bとを具える。本体部11の内部には、内部配管11cが配置されている。内部配管11cは、直線状部11aの内径よりも小さい短尺な管であり(但し、結晶体D1が通過可能な大きさを有する)、直線状部11aの内径に等しいフランジを導入側の開口部に具える。このフランジは、内部配管11cの軸方向と直交するように設けられており、直線状部11aと分岐部11bとの接続箇所に取り付けられている。この配置により、圧縮機Cの外気取込口(図示せず)から分岐部11bを通過した外気は、内部配管11cに接触して、流れる方向がほぼ90°変えられる。このような本体部11として市販のエアガンを利用することができる。
【0069】
導入側配管部12は、一方の開口部(吸引口12i)が結晶体D1の吸引に用いられ、他方の開口部が本体部11に接続される。この導入側配管部12は、一方の開口部側にテーパ部12aを具える。テーパ部12aは、吸引口12i側に向かって先細りしている。吸引口12iは、結晶体D1が十分に挿通可能な大きさである。排出側配管部13は、一方の開口部が本体部11に接続され、他方の開口部(排出口13i)が結晶体D1の排出に用いられる。この排出側配管部13は、導入側配管部12から本体部11を通過した結晶体D1を回収箱20に排出する。
【0070】
この吸引手段を用いて、結晶体D1を回収するには、以下のように行う。圧縮機Cを駆動して、白矢印で示すように分岐部11bから排出口13oに向かって外気を排出する。このとき、上述のように内部配管11cにより外気の流れる方向が変化することで、導入側配管部12の吸引口12i近傍が強制的に負圧になる。その結果、直線状部11a内には、吸引口12iから排出口13oに向かって外気が排出されるような外気の流れがつくられる。この外気の流れを利用して、結晶体D1を確実に回収箱20に回収することができる。特に、この吸引手段は、テーパ部12aを具えることで、吸引口12i近傍における外気の吸い込み速さ(流速)を大きくすることができ、結晶体D1をより確実に吸引できる。
【0071】
実施形態1で示した自重による回収では、吸着コレット5(図1)に結晶体D1がくっついたままになることがあった。この原因の一つとして、静電気や、吸着コレット5の吸着口に貼付テーブル7(図1)の糊が付着したことが考えられる。糊の付着は、例えば、良好な画像が取得されず、この画像を用いることで特定の面の面積の演算が適切に行われず、その結果、吸着コレット5が結晶体D1を貼付テーブル7に移送する際に結晶体D1を落下したことで、吸着コレット5の吸引口が貼付テーブル7に押し付けられて行われたと考えられる。吸着コレット5に結晶体D1がくっついたままであると、その次の結晶体D1を取り出せず、選別作業が停止してしまう。これに対し、上述のように吸引手段で結晶体D1を吸引して回収することで、選別作業の停止を低減することができる。
【0072】
なお、上述のように外気を導入して排出する経路と、結晶体を導入して排出する経路とにおいて、排出側が共通し、導入側が異なる吸引手段だけでなく、両経路が同一である吸引手段、例えば、一般的な掃除機のような吸引手段を用いることもできる。この場合、圧縮機と直線的に回収箱(結晶体を回収する空間)が設けられるため、出力が大きい圧縮機を用いることが好ましい。
【0073】
一方、回収箱20は、有底筒状の本体部21と、本体部21の深さ方向に並べて配置された複数の網部材22とを具える。網部材22は、本体部21の開口部側に配置される蓋用網部材22aと、蓋用網部材22aよりも深さ方向に下方の位置に、蓋用網部材22aから離間されて配置される流動規制用網部材22bとを具える。両網部材22a,22bはメッシュサイズが異なっている。蓋用網部材22aは、蓋として機能するように、即ち、回収した結晶体D1が回収箱20から飛散しないように、そのメッシュサイズが結晶体D1の外径よりも小さい。一方、流動規制用網部材22bは、回収した結晶体D1が回収箱20内の全体に亘って舞い上がらないように、回収箱20内における結晶体の流動範囲を規制するものであり、そのメッシュサイズが結晶体D1の外径よりも大きい。蓋用網部材22aは、その中央部に上記配管部10の排出側(排出側配管部13)が挿入できるように貫通孔22hが設けられている。貫通孔22hに排出側配管部13を挿入し、排出口13oが、両網部材22a,22bの中間に位置するように配管部10を配置している。
【0074】
蓋用網部材22aのメッシュサイズは、結晶体D1の外径に応じて適宜選択することができるが、結晶体D1の外径よりも若干小さい程度としておくと、排気抵抗を低減できて好ましい。流動規制用網部材22bのメッシュサイズも、結晶体D1の外径に応じて適宜選択することができるが、結晶体D1の外径よりも大き過ぎると、流動規制効果が小さい。
【0075】
なお、上記吸引手段に対して網部材22を設けない回収箱を用いることもできる。しかし、網部材22を具える回収箱20を用いることで、上記吸引手段の排気抵抗を低減できる上に、排気に伴う結晶体D1の飛散を防止でき、回収箱20に確実に回収できる。また、排気に伴う結晶体D1の舞い上がりを防止でき、結晶体D1が回収箱に衝突することになどよる騒音も抑制できる。
【0076】
[試験例4]
流動規制用網部材のメッシュサイズを変化させて、結晶体の舞い上がり状態を調べた。舞い上がり状態は、以下のように評価した。回収箱から10mm離れた位置において、排気時の音を騒音計で測定し、85dB以上の場合を×、85dB未満の場合を○と評価した。その結果を表1に示す。
【0077】
【表1】
【0078】
表1に示すように、結晶体D1の外径dよりも大きく、かつ4倍以下であれば、結晶体の舞い上がりが抑制できることが分かる。
【0079】
[試験例5]
上述した実施例1の装置に対して、実施形態2で述べた回収機構を具えた装置(実施例2)を作製した。この実施例2及び比較例の装置について、吸着コレットの吸着率(%)(=(吸着された結晶体数)/(特定の面の面積が所定の大きさである判定された結晶体数)×100)を比較した。その結果、比較例は、吸着率が46%であるのに対し、実施例2は吸着率が86%と2倍近くに向上していた。
【0080】
このように、特定の照明を具えることに加えて、不良品の回収方法をも工夫することで、品質判定が行われる結晶体数を増加することができ、結果として、良品の回収率を高められる。
【0081】
(実施形態3)
所定の載置方向ではないと判定された結晶体D1を回収する機構を別途設けると、当該結晶体を確実に回収できる。この回収機構は、載置方向判定部411により、所定の載置方向を向いていないと判定された結晶体D1を吸引する吸引手段(第二の吸引手段)と、吸引された結晶体D1を回収する回収箱(第二の回収箱)とを具える。
【0082】
吸引手段は、一端に吸引口を有する配管と、配管の他端に接続され、排気口を有する圧縮機とを具えたものが挙げられる。この吸引口と圧縮機との間に回収箱を配置する。即ち、配管の中間部に回収箱が存在する。回収箱と圧縮機との間には、結晶体が通過できず、かつ排気が可能な網部材を配置する。この構成により、圧縮機を駆動すると、吸引口から外気を吸い込み、排気口から排気される気流に乗せて、結晶体D1を吸引して回収箱に回収できる。このような回収機構は、一般的な掃除機と同様な構成のものが利用できる。或いは、吸引手段として、実施形態2で示した圧縮機の外気取込口から排気口までの経路と、配管部の吸引口から排気口までの経路とが同一ではなく部分的に共通する形状の配管を具えるものを利用してもよい。また、回収箱も、実施形態2で示した複数の網部材が配置された回収箱20を利用してもよい。
【0083】
所定の載置方向ではないと判定された結晶体D1は、載置方向の判定の際にたまたま所定の方向を向いていなかった場合があり得る。このような結晶体D1は、回収して、改めて供給ステージ6に載置させて、載置方向の判定を行うことが望まれる。ところが、本来回収されるべき結晶体が供給ステージ6に取り残されて、供給ステージ6に新たに載置された結晶体に混ざって搭載方向の判定が行われると、再度同じ載置状態で判定されるため、所定の載置方向でないと再び判定される。即ち、同じ判定が繰り返し行われるため、選別効率が低下する。これに対して、実施形態3で述べた回収機構を具えることで、回収されるべき結晶体D1が供給ステージ6に取り残されることを防止でき、選別効率を向上できる。
【0084】
なお、上述した実施形態は、本発明の要旨を逸脱することなく、適宜変更することが可能であり、上述した構成に限定されるものではない。例えば、位置検出用照明3は、結晶体に対する透過率が70%以上であるものを用いてもよい。また、例えば、複数の結晶体を供給ステージ上に適当にばら撒くことに代えて、各結晶体を所定の位置に整列させて、各位置データを予め演算処理装置に登録させておいてもよい。この場合、粗位置カメラ3や位置検出用照明3rを省略した装置とすることができる。
【産業上の利用可能性】
【0085】
本発明結晶体の選別装置は、温度差法といった結晶成長方法を行うに当たり、結晶体の成長面を判別するときに好適に利用することができる。
【図面の簡単な説明】
【0086】
【図1】実施形態1の選別装置の概略斜視図である。
【図2】供給テーブルに載置された各結晶体の粗位置を検出する工程を説明する説明図である。
【図3】供給テーブルに載置された各結晶体の載置方向を検出する工程を説明する説明図である。
【図4】供給テーブルに載置された各結晶体において特定の面を検査する工程を説明する説明図である。
【図5】(I)は、結晶体の斜視図、(II)は、この結晶体の(100)面を上面とした上面図(下面図)、(III)は、この結晶体の(111)面を上面とした上面図(下面図)である。
【図6】実施形態1の選別装置において、演算処理装置を中心に示す機能ブロック図である。
【図7】実施例1の選別装置に具える下方側照明を用いて上面カメラで撮像した画像を説明する説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。
【図8】比較例の選別装置に具える下方側照明を用いて上面カメラで撮像した画像を説明する説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。
【図9】実施例1の選別装置に具える上方側照明を用いて上面カメラで撮像した画像を説明する説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。
【図10】比較例の選別装置に具える上方側照明を用いて上面カメラで撮像した画像を説明する説明図であり、(I)は、撮影画像、(II)は、撮影画像の模式図、(III)は、二値化像の模式図を示す。
【図11】実施例1の選別装置に具える上方側照明を用いて上面カメラで撮像した撮影画像を示す。
【図12】比較例の選別装置に具える上方側照明を用いて上面カメラで撮像した撮影画像を示す。
【図13】透過率が異なる光源を下方側照明に用いて、上面カメラで撮影した画像及び二値化像、及び各光源の透過率を示す表である。
【図14】実施形態2の選別装置に具える回収機構の概略構成図である。
【符号の説明】
【0087】
1 上面カメラ 1r 下方側照明 1x 移動機構 1m モータ 1s スライダ
1b ボールねじ
2 下面カメラ 2r 上方側照明
3 粗位置カメラ 3r 位置検出用照明
4 演算処理装置 40 品質判定部 41 画像処理判定部 42 制御部
410 粗位置検出部 410a 二値化処理部 410b 重心演算部
411 載置方向判定部 411a 二値化処理部 411b 直線抽出部
411c 角度演算部 411d 角度判定部
412 面積検出部 412a 二値化処理部 412b 所定面抽出部
412c 面積演算部 412d 面積判定部
413 品質検出部 413a 画像データ抽出部 413b 二値化処理部
413c 輪郭抽出部
5 吸着コレット 5z 移動機構 5m モータ 5s スライダ
5b ボールねじ
6 供給ステージ 6t 供給テーブル 6m モータ 6s スライダ
6b ボールねじ
7 貼付ステージ 7t 貼付テーブル 7m モータ 7s スライダ
7b ボールねじ
8 フィーダ 8g ガイド
10 配管部 11 本体部 11a 直線状部 11b 分岐部 11c 内部配管
12 導入側配管部 12a テーパ部 12i 吸引口 13 排出側配管部
13o 排出口
20 回収箱 21 本体部 22 網部材 22a 蓋用網部材
22b 流動規制用網部材 22h 貫通孔
D,D1,D2 結晶体 D(100) 結晶体の(100)面 D(111) 結晶体の(111)面
C 圧縮機 f1 結晶体の特定の面
f2 結晶体の特定の面の周囲に存在する面 L 結晶体の全体外形を描く直線
【特許請求の範囲】
【請求項1】
照明で照らした結晶体をカメラで撮影し、得られた画像を用いて判定部が結晶体の品質の良否を判定する結晶体の選別装置であって、
前記照明は、結晶体に対する透過率が70%未満である低透過性光源を具えることを特徴とする結晶体の選別装置。
【請求項2】
前記低透過性光源を用いて撮影した画像を二値化する二値化処理部と、
前記二値化された二値化像をハフ変換して直線成分を抽出する直線抽出部と、
前記抽出された複数の直線成分がなす角を演算する角度演算部と、
前記演算された角度が所定の大きさか否かを判定する角度判定部とを具え、
前記角度が所定の大きさでないと判定されたとき、前記二値化処理部は、二値化の閾値を変化させて二値化像を取得し、前記直線抽出部は、新たに取得した二値化像から直線成分の抽出を行い、前記角度判定部は、新たに抽出された直線成分がなす角が所定の大きさか否かを判定することを特徴とする請求項1に記載の結晶体の選別装置。
【請求項3】
検査台に載置された複数の結晶体から、一つの結晶体を取り出して保持する保持手段と、
前記保持手段に保持された結晶体の良否を前記判定部が判定したとき、不良と判定された不良品を回収する第一の回収箱と、
前記保持手段に保持された不良品を回収箱内に収集するために吸引する第一の吸引手段とを具えることを特徴とする請求項1又は2に記載の結晶体の選別装置。
【請求項4】
検査台に載置された複数の結晶体において、各結晶体が所定の載置方向を向いているか否かを判定する載置方向判定部と、
前記載置方向判定部により、所定の載置方向を向いていないと判定された結晶体を回収する第二の回収箱と、
前記結晶体を前記検査台から第二の回収箱に収集するために吸引する第二の吸引手段とを具えることを特徴とする請求項1〜3のいずれか1項に記載の結晶体の選別装置。
【請求項5】
前記回収箱は、メッシュサイズの異なる網部材が回収箱の深さ方向に並べて配置されており、
前記網部材は、メッシュサイズが結晶体の外径よりも小さい蓋用網部材と、メッシュサイズが結晶体の外径よりも大きく、かつ結晶体の外径の4倍以下である流動規制用網部材とを具え、
前記流動規制用網部材は、前記蓋用網部材よりも回収箱の深さ方向の下方に離間して配置されて、回収箱内で結晶体が流動する範囲を規制することを特徴とする請求項3又は4に記載の結晶体の選別装置。
【請求項1】
照明で照らした結晶体をカメラで撮影し、得られた画像を用いて判定部が結晶体の品質の良否を判定する結晶体の選別装置であって、
前記照明は、結晶体に対する透過率が70%未満である低透過性光源を具えることを特徴とする結晶体の選別装置。
【請求項2】
前記低透過性光源を用いて撮影した画像を二値化する二値化処理部と、
前記二値化された二値化像をハフ変換して直線成分を抽出する直線抽出部と、
前記抽出された複数の直線成分がなす角を演算する角度演算部と、
前記演算された角度が所定の大きさか否かを判定する角度判定部とを具え、
前記角度が所定の大きさでないと判定されたとき、前記二値化処理部は、二値化の閾値を変化させて二値化像を取得し、前記直線抽出部は、新たに取得した二値化像から直線成分の抽出を行い、前記角度判定部は、新たに抽出された直線成分がなす角が所定の大きさか否かを判定することを特徴とする請求項1に記載の結晶体の選別装置。
【請求項3】
検査台に載置された複数の結晶体から、一つの結晶体を取り出して保持する保持手段と、
前記保持手段に保持された結晶体の良否を前記判定部が判定したとき、不良と判定された不良品を回収する第一の回収箱と、
前記保持手段に保持された不良品を回収箱内に収集するために吸引する第一の吸引手段とを具えることを特徴とする請求項1又は2に記載の結晶体の選別装置。
【請求項4】
検査台に載置された複数の結晶体において、各結晶体が所定の載置方向を向いているか否かを判定する載置方向判定部と、
前記載置方向判定部により、所定の載置方向を向いていないと判定された結晶体を回収する第二の回収箱と、
前記結晶体を前記検査台から第二の回収箱に収集するために吸引する第二の吸引手段とを具えることを特徴とする請求項1〜3のいずれか1項に記載の結晶体の選別装置。
【請求項5】
前記回収箱は、メッシュサイズの異なる網部材が回収箱の深さ方向に並べて配置されており、
前記網部材は、メッシュサイズが結晶体の外径よりも小さい蓋用網部材と、メッシュサイズが結晶体の外径よりも大きく、かつ結晶体の外径の4倍以下である流動規制用網部材とを具え、
前記流動規制用網部材は、前記蓋用網部材よりも回収箱の深さ方向の下方に離間して配置されて、回収箱内で結晶体が流動する範囲を規制することを特徴とする請求項3又は4に記載の結晶体の選別装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図14】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図14】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2009−250680(P2009−250680A)
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2008−96291(P2008−96291)
【出願日】平成20年4月2日(2008.4.2)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【出願人】(503212652)住友電工ハードメタル株式会社 (390)
【Fターム(参考)】
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成20年4月2日(2008.4.2)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【出願人】(503212652)住友電工ハードメタル株式会社 (390)
【Fターム(参考)】
[ Back to top ]