
結晶粒解析装置、結晶粒解析方法、及びコンピュータプログラム
【課題】 解析対象領域の境界線の部分において結晶粒が時間の経過と共にどのように変化するのかを、従来よりも正確に解析できるようにする。
【解決手段】 境界点i21〜i24と隣接する点i25〜i34と、解析対象領域に対して線対称となる仮想点81〜88を設定し、これら境界点i21〜i24と、点i25〜i34と、仮想点81〜88とにより定まる円弧91〜98の曲率(曲率半径Ri(t)の逆数)と、その境界点iが属する粒界uの単位長さ当たりの粒界エネルギーの大きさ(絶対値)γiとの積に基づいて、境界点iの駆動力Fi(t)の大きさを決定する。
【解決手段】 境界点i21〜i24と隣接する点i25〜i34と、解析対象領域に対して線対称となる仮想点81〜88を設定し、これら境界点i21〜i24と、点i25〜i34と、仮想点81〜88とにより定まる円弧91〜98の曲率(曲率半径Ri(t)の逆数)と、その境界点iが属する粒界uの単位長さ当たりの粒界エネルギーの大きさ(絶対値)γiとの積に基づいて、境界点iの駆動力Fi(t)の大きさを決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、結晶粒解析装置、結晶粒解析方法、及びコンピュータプログラムに関し、特に、結晶粒の状態を解析するために用いて好適なものである。
【背景技術】
【0002】
従来から、金属材料の結晶粒の状態をコンピュータで解析することが行われている。
特許文献1には、圧延された薄板鋼板を焼鈍して一次再結晶化し、一次再結晶化した薄板鋼板を仕上げ焼鈍して、二次再結晶化した薄板鋼板を得るための技術が開示されている。かかる技術では、一次再結晶化した結晶粒の粒径の分布を統計的に求める。そして、その一次再結晶化した結晶粒の粒径の分布を用いて、一次再結晶化した個々の結晶粒の粒界エネルギーの積分値(積分粒界エネルギー)を求め、求めた結果を用いて一次再結晶化した結晶粒の最適な分布を推定する。そして、特許文献1では、このようにして推定した分布となるように、一次再結晶化した結晶粒を得るようにすれば、適正に二次再結晶化した薄板鋼板が得られることになるとしている。
【0003】
また、特許文献2には、結晶粒の両端点を結ぶ直線で粒界を近似し、その結晶粒の両端点における一定時間毎の移動を追跡することにより、結晶粒の成長の時間変化を数値計算によりシミュレートすることが開示されている。
また、特許文献3には、均熱工程におけるAlスラブ、あるいは焼鈍工程におけるAl板材の各工程における初期結晶粒径、保持温度、保持時間と、試験片から得られた種々の係数を所定の計算式に代入して、結晶が成長した後の粒径を算出することが開示されている。
【0004】
更に、特許文献4には、鋼片のサイズ、成分情報及び圧延条件に基づいて圧延後のオーステナイト粒径及び平均転位密度を算出し、算出した結果と冷却条件とに基づいて、変態組織の構成各相の分率、平均生成温度及び結晶粒径を算出し、更にその後の熱処理条件に基づいて最終組織を構成する各相の分率、粒径、炭化物・析出物サイズを算出することが開示されている。
【0005】
【特許文献1】特開平6−158165号公報
【特許文献2】特開平7−97290号公報
【特許文献3】特開2002−224721号公報
【特許文献4】特開平5−87800号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、一次再結晶化した結晶粒は、二次再結晶化される際に種々の挙動をとりながら成長する。
しかしながら、特許文献1に記載の技術では、一次再結晶化した結晶粒について着目し、一次再結晶化した結晶粒が、二次再結晶化されるまでの挙動について考慮していない。したがって、結晶粒が時間の経過と共にどのように変化していくのかについての正確な知見を得ることが困難であった。また、前述した従来の技術では、一次再結晶化した結晶粒の粒径の分布を統計的に求めるので、事前の製造・試験等に基づいた多くのデータが必要であった。したがって、結晶粒の状態を簡便に解析することが困難であるという問題点があった。
【0007】
また、特許文献2に記載の技術では、粒界を一つの直線で近似しているので、粒界の形
状を正確に表現することができない。したがって、結晶粒の時間的な変化の評価精度が極端に低くなってしまうという問題点があった。
また、特許文献3に記載の技術では、結晶粒径の計算モデルが開示されているだけである。したがって、具体的にどのような形状となって結晶粒が時間の経過と共に変化するのかを解析することが困難であるという問題点があった。
また、特許文献4に記載の技術では、具体的にどのようなモデルを用いて、結晶粒成長の計算を行うのかが示されていないという問題点があった。
【0008】
特に、金属材料の結晶粒の状態をコンピュータで解析する場合には、金属材料全体ではなく一部の領域を切り出し、切り出した領域について解析することになる。したがって、解析する対象となる領域(解析対象領域)の境界(端)の部分における状態も考慮して解析を行う必要がある。しかしながら、前述した従来の技術では、解析対象領域の境界線の部分に対して適切な検討を行っていないため、解析対象領域の境界線の部分において結晶粒が時間の経過と共にどのように変化するのかを正確に解析することが困難であるという問題点があった。
【0009】
本発明はこのような問題点に鑑みてなされたものであり、解析対象領域の境界線の部分において結晶粒が時間の経過と共にどのように変化するのかを、従来よりも正確に解析できるようにすることを目的とする。
【課題を解決するための手段】
【0010】
本発明の結晶粒解析装置は、金属材料における結晶の画像信号を取得する画像信号取得手段と、前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定手段と、前記点設定手段により設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更手段とを有することを特徴とする。
【0011】
本発明の結晶粒解析方法は、金属材料における結晶の画像信号を取得する画像信号取得ステップと、前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定ステップと、前記点設定ステップにより設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更ステップとを有することを特徴とする。
【0012】
本発明のコンピュータプログラムは、金属材料における結晶の画像信号を取得する画像信号取得ステップと、前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定ステップと、前記点設定ステップにより設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更ステップとをコンピュータに実行させることを特徴とする。
【発明の効果】
【0013】
本発明によれば、境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、境界点の位置を変更するようにした。したがって、解析対象領域の境界線の部分において結晶粒が時間の経過と共にどのように変化するのかを、従来よりも正確に解析できる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照しながら、本発明の一実施形態を説明する。尚、本実施形態では、結晶粒の解析対象である金属材料(例えば単相金属材料)として、電磁鋼鈑を適用した場合を例に挙げて説明する。
図1は、本実施形態の結晶粒解析装置で行われる解析方法の一例を概念的に示す図である。尚、図1では、説明の都合上、電磁鋼鈑を構成する多数の結晶粒のうち、1つの結晶粒Aのみを示しているが、実際には、多数の結晶粒により電磁鋼鈑が形成されるということは言うまでもない。
【0015】
本実施形態の結晶粒解析装置では、図1に示すようにして、結晶粒をモデル化するようにしている。
まず、図1(a)に示すように、結晶粒Aの3つの粒界ua〜ucの両端点に対応する位置に三重点ia、ie、ifを設定し、粒界ua〜ucの中間点に対応する位置に二重点ib〜id、ig〜iiを設定する。ここで、三重点ia、ie、ifとは、3つのラインpが交わる点(ここでは、3つの結晶粒と接する点)をいい、二重点ib〜id、ig〜iiとは、2つのラインpが交わる点(ここでは、2つの結晶粒と接する点)をいう。そして、同一の粒界ua〜uc上で互いに隣接する点(粒界点)iを互いに結ぶ直線(ライン)を設定する。
以上のように、本実施形態では、粒界ua〜ucの両端の位置だけでなく、粒界ua〜ucの途中の形状も出来るだけ忠実に表すことができるように、二重点ib〜id、ig〜iiを設定するようにしている。
【0016】
以上のようにしてモデル化された結晶の各点(二重点及び三重点)ia〜iiの夫々について、時間tで生じる駆動力Fi(t)[N]を算出する。そして、算出した駆動力Fi(t)に基づいて、Δt[sec]が経過した後(時間t+Δt)における各点(二重点及び三重点)ia〜iiの位置を算出する。そうすると、図1(a)に示す各点(二重点及び三重点)ia〜iiの位置は、例えば、図1(b)に示す位置に移動する。
【0017】
また、本実施形態の結晶粒解析装置では、以上のようにしてモデル化したラインが解析対象領域の境界線と交わる点を設定するようにしている。図2は、解析対象領域付近において結晶粒をモデル化した様子の一例を示す図である。
図2に示すように、本実施形態では、1つのラインpが解析対象領域の境界線と交わる点(ここでは、2つの結晶粒A1、A2と接する点)を単点ipとして設定し、2つのラインpが解析対象領域の境界線と交わる点(ここでは、3つの結晶粒A3〜A5と接する点)を二重点iqとして設定し、3つのラインが解析対象領域の境界線と交わる点(ここでは、4つの結晶粒A6〜A9と接する点)を三重点irとして設定する。
以上のように、本実施形態では、解析対象領域の境界線によって区画されない部分に加えて、解析対象領域の境界線によって区画される部分についても、点を設定するようにしている。尚、以下の説明では、ラインが解析対象領域の境界線と交わる点を、その他の点と表記を区別するために、必要に応じて境界点と称する。
【0018】
本実施形態の結晶粒解析装置では、以上のように、結晶粒Aに含まれる粒界ua〜ucの両端点に対応する三重点ia、ie、ifと、粒界ua〜ucの中間点に対応する二重点ib〜id、ig〜iiと、ラインが解析対象領域の境界線と交わる単点ip、二重点iq、及び三重点irとの夫々に生じる駆動力Fi(t)を算出して、三重点ia、ie、ifと、二重点ib〜id、ig〜iiと、単点ip、二重点iq、及び三重点irとが移動する様子を解析する。これにより、例えば、図1(a)に示す結晶粒Aaが、図1(b)に示す結晶粒Abのように、時間の経過と共に変化する様子を、大きな計算負荷をかけることなく出来るだけ正確に解析することができる。尚、解析対象領域の境界線における結晶粒の挙動については、図8等を用いて後述する。
【0019】
以下に、結晶粒解析装置の構成について詳細に説明する。
図3は、結晶粒解析装置の機能構成の一例を示すブロック図である。尚、結晶粒解析装置100のハードウェアは、パーソナルコンピュータ等、CPU、ROM、RAM、ハードディスク、画像入出力ボード、各種インターフェース、及びインターフェースコントローラ等を備えた情報処理装置を用いて実現することができる。そして、特に断りのない限り、図3に示す各ブロックは、CPUが、ROMやハードディスクに記憶されている制御プログラムを、RAMを用いて実行することにより実現される。そして、図3に示す各ブロック間で、信号のやり取りを行うことにより、以下の処理が実現される。
【0020】
図3において、結晶画像取得部101は、例えば、EBSP(Electron Back Scattering Pattern)法で得られた「電磁鋼鈑の結晶粒Aの画像信号と、その画像信号に含まれる各結晶粒Aの方位ξを示す信号」等を取得して、ハードディスク等に記憶するためのものである。尚、以下の説明では、電磁鋼鈑の結晶粒Aの画像を、必要に応じて、結晶粒画像と称する。尚、結晶画像取得部101は、EBSP法による結晶分析を行う分析装置から、前述した信号を直接取得するようにしてもよいし、DVDやCD−ROM等のリムーバル記憶媒体から、前述した信号を間接的に取得してもよい。
【0021】
結晶画像表示部102は、例えば、ユーザによる操作装置300の操作に基づいて、結晶画像取得部102により取得された結晶粒画像信号に基づく結晶粒画像を、表示装置200に表示させる。尚、表示装置200は、LCD(Liquid Crystal Display)等のコンピュータディスプレイを備えている。また、操作装置300は、キーボードやマウス等のユーザインターフェースを備えている。
【0022】
点設定部103は、結晶画像表示部102により表示された結晶粒画像に対して、ユーザが操作装置300を用いて指定した点(単点、二重点、及び三重点)iを取得し、取得した点(単点、二重点及び三重点)iの数NIと、その点iの初期位置ri(0)を示すベクトルとを、RAM又はハードディスクに設定(記憶)する。尚、本実施形態では、ユーザは、点(単点、二重点及び三重点)iの数と初期位置を、任意に指定することができるものとする。このように本実施形態では、解析対象領域の境界線(結晶粒画像の境界)により区画されない結晶粒A上の点iのみならず、解析対象領域の境界線により区画される結晶粒Aの解析対象領域の境界線上の点iも指定するようにしている。
また、点設定部103は、計算対象の点(単点、二重点又は三重点)iにおけるΔt[sec]後の位置ri(t+Δt)を示すベクトルが、後述するようにして位置計算部116により計算されると、その点iの位置ri(t+Δt)を示すベクトルを、RAM又はハードディスクに設定(記憶)する。
更に、後述するように、解析対象領域の境界線上の境界点として二重点を駆動させる場合には、境界点を2つに分裂させる(図8(b)の右図を参照)。したがって、二重点である境界点iを駆動させる場合、点設定部103は、計算対象の点の総数NIに「1」を加算する。
また、解析対象領域の境界線上の境界点として三重点を駆動させる場合には、境界点を3つに分裂させる(図8(c)の右図を参照)。したがって、三重点である境界点iを駆動させる場合、点設定部103は、計算対象の点の総数NIに「2」を加算する。
【0023】
ライン設定部104は、点設定部103で設定された点(単点、二重点及び三重点)iのうち、同一の粒界u上で互いに隣接する2つの点iにより特定されるラインpに関する情報を、RAM又はハードディスクに設定(記憶)する。このように、ラインpは、同一の粒界u上で互いに隣接する2つの点iを両端とする直線である。
粒界設定部105は、ライン設定部104により設定されたラインpのうち、点設定部103により設定された三重点iを両端として互いに接続されたラインpにより特定される粒界uに関する情報を、RAM又はハードディスクに設定する。更に、粒界設定部105は、ライン設定部104により設定されたラインpのうち、三重点iを一端とし、解析対象領域の境界線上の点(単点、二重点、又は三重点)を他端として互いに接続されたラインpにより特定される粒界uに関する情報も、RAM又はハードディスクに設定する。
【0024】
図4は、結晶画像表示部102により取得される結晶粒画像と(図4(a))、点設定部103により設定される点(二重点及び三重点)iと(図4(b))、ライン設定部104、粒界設定部105により設定されるラインp、粒界u(図4(c))の一例を示す図である。尚、説明の都合上、図4(b)、(c)では、図4(a)に示す結晶粒画像31に含まれる多数の結晶粒Aのうち、領域32内の結晶粒A1に対して設定された点i、ラインp、粒界uのみを示している。
【0025】
図4(a)に示すようにして結晶粒画像31が表示されると、ユーザは、マウス等の操作装置300を用いて、粒界uの両端点に対応する位置を三重点iとして指定すると共に、粒界uの中間点の位置を二重点iとして指定する。そうすると、図4(b)に示すように、例えば、結晶粒A1に対して、二重点i2〜i4、i6〜i10、i12〜i15、i17、i18と、三重点i1、i5、i11、i16とが設定される。
【0026】
そして、これら二重点及び三重点i1〜i18に基づいて、図4(c)に示すように、ラインp1〜p18と、粒界u1〜u4とが設定される。ここで、例えば、ラインp1は、三重点i1と二重点i2とにより特定される。また、粒界u1は、三重点i1、i5を両端として相互に接続されるラインp1〜p4により特定される。
尚、図4(c)に示すように、粒界u1は、結晶粒A1、A2の粒界であり、粒界u2は、結晶粒A1、A5の粒界であり、粒界u3は、結晶粒A1、A4の粒界であり、粒界u4は、結晶粒A1、A3の粒界である。
【0027】
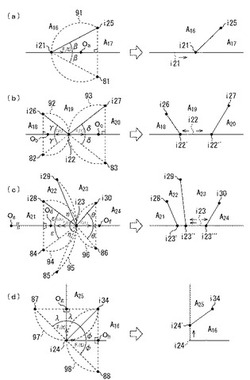
図5は、点設定部103により解析対象領域の境界線上に設定される点(単点、二重点、及び三重点)iと、ライン設定部104、粒界設定部105により解析対象領域の境界線を含む位置に設定されるラインp、粒界uの一例を示す図である。尚、説明の都合上、図5では、図4(a)に示す結晶粒画像31に含まれる多数の結晶粒Aのうち、領域33〜36内の結晶粒A16〜A25に対して設定された点i、ラインp、粒界uのみを示している。ここで、図5(a)は、領域33に対応する図であり、図5(b)は、領域34に対応する図であり、図5(c)は、領域35に対応する図であり、図5(d)は、領域36に対応する図である。
【0028】
ユーザは、マウス等の操作装置300を用いて、解析対象領域の境界線上に、単点、二重点、又は三重点として指定する。このときユーザは、例えば、結晶粒画像31において、解析対象領域の境界線上の点に交わっている粒界の数に応じて、単点、二重点、及び三重点の何れを指定することができる。例えば、結晶粒画像31において、解析対象領域の境界線上の点に交わっている粒界が1つ、2つ、3つであるときに、その点を夫々、単点、二重点、三重点として指定する。
以上のようにして、解析対象領域の境界線上に、単点、二重点、又は三重点が指定されると、図5の左図に示すように、例えば、単点i21、i24と、二重点i22と、三重点i23とが解析対象領域の境界線上に設定される。
【0029】
そして、これら単点、二重点、及び三重点i21〜i24と、前述したようにして粒界uの中間点に対して指定された二重点又は三重点i25〜i34とに基づいて、図5の右図に示すように、ラインp21〜p27と、粒界u21〜u27とが設定される。ここで、例えば、ラインp21は、単点i21と二重点i25とにより特定される。また、粒界u21は、単点i21と、単点i21とラインpを介して繋がっている三重点のうち単点i21に最も近い三重点i(図示せず)とを両端として相互に接続されるラインp(ラインp21等)により特定される。
尚、図5の右図に示すように、粒界u21は、結晶粒A16、A17の粒界であり、粒界u22は、結晶粒A18、A19の粒界であり、粒界u23は、結晶粒A19、A20の粒界である。また、粒界u24は、結晶粒A21、A22の粒界であり、粒界u25は、結晶粒A22、A23の粒界であり、粒界u26は、結晶粒A23、A24の粒界であり、粒界u27は、結晶粒A25、A16の粒界である。
【0030】
解析温度設定部106は、解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)[℃]を、ユーザによる操作装置300の操作に基づいて取得して、RAM又はハードディスクに設定(記憶)する。尚、解析温度設定部106が取得する解析温度θ(t)は、時間に依らない一定値であっても、時間に依存する値であっても(解析温度θ(t)が時間の経過と共に変化するようにしても)よい。
【0031】
方位設定部107は、結晶画像取得部101により取得された「結晶粒画像31に含まれる各結晶粒Aの方位ξを示す信号」に基づいて、結晶粒画像31に含まれる全ての結晶粒Aの方位ξを、RAM又はハードディスクに設定(記憶)する。
【0032】
粒界エネルギー記憶部108は、例えば、単位長さ当たりの粒界エネルギーγ[J/m]と、粒界uを介して互いに隣接する2つの結晶粒Aの方位ξの差分Δξの絶対値と、解析温度θ(t)との関係を示すグラフ、数値列、式、又はそれらの組み合わせを記憶する。尚、以下の説明では、これらグラフ、数値列、式、又はそれらの組み合わせをグラフ等と称する。
例えば、図4(c)に示した粒界u1における「単位長さ当たりの粒界エネルギーγ」は、結晶粒A1の方位ξ1と結晶粒A1の方位ξ2との差分Δξの絶対値と、解析温度設定部106により設定された解析温度θ(t)とに対応した「単位長さ当たりの粒界エネルギーγ」を、粒界エネルギー記憶部108に記憶されたグラフ等から読み出すことにより得られる。尚、以下の説明では、単位長さ当たりの粒界エネルギーγを、必要に応じて粒界エネルギーγと略称する。また、粒界エネルギー記憶部108は、例えば、RAM又はハードディスクを用いて構成される。
【0033】
粒界エネルギー設定部109は、方位設定部107により設定された結晶粒Aの方位ξと、解析温度設定部106により取得された解析温度θ(t)とに基づいて、粒界設定部105により設定された全ての粒界uの粒界エネルギーγを、前述したようにして粒界エネルギー記憶部108に記憶されたグラフ等から読み出す。そして、粒界エネルギー設定部109は、読み出した粒界エネルギーγを、RAM又はハードディスクに設定(記憶)する。
【0034】
易動度記憶部110は、易動度Mi[cm2/(V・sec)]と、粒界uを介して互
いに隣接する2つの結晶粒Aの方位ξの差分Δξの絶対値と、解析温度θ(t)との関係を示すグラフ、数値列、式、又はそれらの組み合わせを記憶する。尚、以下の説明では、これらグラフ、数値列、式、又はそれらの組み合わせをグラフ等と称する。
例えば、図4(c)に示した粒界u1における易動度Miは、結晶粒A1の方位ξ1と結晶粒A2の方位ξ2との差分Δξの絶対値と、解析温度設定部106により取得された解析温度θ(t)とに対応した易動度Miを、易動度記憶部110に記憶されたグラフ等から読み出すことにより得られる。尚、易動度記憶部110は、例えば、RAM又はハードディスクを用いて構成される。
【0035】
易動度設定部111は、方位設定部107により設定された結晶粒Aの方位ξと、解析温度設定部106により取得された解析温度θ(t)とに基づいて、粒界設定部105により設定された全ての粒界uの易動度Miを、前述したようにして易動度記憶部110に記憶されたグラフ等から読み出す。そして、易動度設定部111は、読み出した易動度Miを、RAM又はハードディスクに設定(記憶)する。
【0036】
解析時間設定部112は、例えば、ユーザによる操作装置300の操作に基づいて、解析完了時間T[sec]を取得して、RAM又はハードディスクに設定(記憶)する。そして、解析時間設定部112は、解析完了時間Tが経過するまで、時間tを監視する。
解析点判別部113は、点設定部103により設定された全ての点(二重点及び三重点)iを、計算対象の点として、重複することなく順番に指定する。そして、解析点判別部113は、指定した点iが、二重点であるのか、それとも三重点であるのかを判別する。
【0037】
二重点用駆動力計算部114は、解析点判別部113により、計算対象の点iが解析対象領域の境界線上にない二重点であると判別された場合に、その二重点に生じる駆動力Fi(t)を計算する。
図6は、解析対象領域の境界線上にない二重点に生じる駆動力Fi(t)の計算方法の一例を説明する図である。
【0038】
図6において、二重点iと、その二重点に隣接する2つの点i−1、i+1とにより定まる円弧41の曲率半径をRi(t)[m]とする。また、二重点iが属する粒界uの単位長さ当たりの粒界エネルギーの大きさ(絶対値)をγiとする。そうすると、二重点iに生じる駆動力Fi(t)の大きさは、以下の(1)式で表される。また、二重点iに生じる駆動力Fi(t)の方向は、二重点iから曲率中心Oに向かう方向である。
【0039】
【数1】

【0040】
この(1)式は、以下のようにして導出される。
まず、二重点iが属する粒界uの粒界ベクトルγiの大きさ(絶対値)と同じ大きさを有し、且つ、二重点iから点i−1、i+1に向かう方向を有する2つのベクトルfi1、fi2のベクトル和が、二重点iに生じる駆動力Frであると仮定する(図6を参照)。そうすると、二重点iに生じる駆動力Frの大きさは、以下の(2)式で表される。
【0041】
【数2】
【0042】
ここで、lは、二重点iから点i−1(又は点i+1)までの直線42、43の長さ[m]である。また、αは、二重点i及び曲率中心Oを結ぶ直線と、点i−1(又は点i+1)及び曲率中心Oを結ぶ直線とのなす角度[°]である。
二重点iに生じる駆動力を(2)式のようにして定義してもよいが、このようにして定義してしまうと、二重点iに生じる駆動力が、二重点iから点i−1(又は点i+1)までの直線42、43の長さlに依存してしまう。すなわち、二重点iに生じる駆動力が、1つの粒界uに対して設定された二重点iの数に依存してしまう。例えば、図6(c)に示すように、粒界u1に対して3つの二重点i2〜i4が設定された場合と、粒界u1に対して5つの二重点が設定された場合とで、二重点iに生じる駆動力が異なってしまう。
【0043】
そこで、二重点iに生じる駆動力が、二重点iから点i−1(又は点i+1)までの直線42、43の長さlに依存しないように、(2)式の右辺を、その長さlで割った値を、二重点iに生じる駆動力Fi(t)の大きさとして定義した((1)式を参照)。
【0044】
以上のようにして(1)式を用いて、二重点iに生じる駆動力Fi(t)を求めるために、二重点用駆動力計算部114は、計算対象の二重点i、及びその二重点iに隣接する2つの点i−1、i+1の情報を、点設定部103から読み出す。次に、二重点用駆動力計算部114は、二重点iと、その二重点iに隣接する2つの点i−1、i+1とにより定まる円弧41の曲率中心O及び曲率半径Ri(t)を計算する。また、二重点用駆動力計算部114は、計算対象の二重点iに属する粒界uの単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。
【0045】
そして、二重点用駆動力計算部114は、曲率半径Ri(t)と、単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、二重点iに生じる駆動力Fi(t)の大きさを計算する。また、二重点用駆動力計算部114は、計算対象の二重点iから曲率中心Oに向かう方向を計算し、二重点iに生じる駆動力Fi(t)の方向を決定する。
【0046】
図3の説明に戻り、三重点用駆動力計算部115は、解析点判別部113により、計算対象の点iが解析対象領域の境界線上にない三重点であると判別された場合に、その三重点に生じる駆動力Fi(t)を計算する。図7は、解析対象領域の境界線上にない三重点に生じる駆動力Fi(t)の計算方法の一例を説明する図である。尚、図7では、三重点iに生じる駆動力Fi(t)を計算する場合を例に挙げて説明する。また、図7では、三重点iに隣接する3つの点を夫々「1」、「2」、「3」で表記している。
【0047】
まず、三重点用駆動力計算部115は、計算対象の三重点iと、その三重点iに隣接する3つの点1、2、3の情報を、点設定部103から読み出す。そして、三重点用駆動力計算部115は、計算対象の三重点iから、点1、2、3に向かう方向を有する単位ベクトルを計算する。また、三重点用駆動力計算部115は、点1、2、3が属する粒界uにおける単位長さ当たりの粒界エネルギーγi1、γi2、γi3の大きさ(絶対値)を、粒界エネルギー設定部109から取得する。
そして、三重点用駆動力計算部115は、単位長さ当たりの粒界エネルギーγi1、γi2、γi3の大きさ(絶対値)と、計算対象の三重点iから点1、2、3に向かう方向を有する単位ベクトル(dij(t)/|dij(t)|)とを、以下の(3)式に代入して、計算対象の三重点iに生じる駆動力Fi(t)を計算する。
【0048】
【数3】
【0049】
尚、(3)式において、jは、計算対象の三重点iに隣接する3つの点を識別するための変数である。
このように、本実施形態では、点1、2、3が属する粒界uにおける単位長さ当たりの粒界エネルギーγi1、γi2、γi3の大きさ(絶対値)と同じ大きさを有し、且つ、計算対象の三重点iから、その三重点iに隣接する点に向かう方向を有する3つのベクトルDi1(t)、Di2(t)、Di3(t)のベクトル和が、三重点iに生じる駆動力Fi(t)として計算される。
【0050】
図3の説明に戻り、境界点用駆動力計算部118は、解析点判別部113により、計算対象の点iが解析対象領域の境界線上にある境界点(単点、二重点、及び三重点)であると判別された場合に、その境界点に生じる駆動力Fi(t)を計算する。図8は、解析対象領域の境界線上にある点(境界点)に生じる駆動力Fi(t)の計算方法の一例を説明する図である。尚、図8(a)は、図4に示した領域33に対応する図であり、図8(b)は、領域34に対応する図であり、図8(c)は、領域35に対応する図であり、図8(d)は、領域36に対応する図である。
【0051】
図8において、本実施形態では、境界点用駆動力計算部118は、前述した二重点用駆動力計算部114と同様に、(1)式を用いて、境界点iに生じる駆動力Fi(t)を計算する。前述したように、(1)式では、曲率半径Ri(t)を使用する。そこで、境界点用駆動力計算部118は、境界点i21〜i24に隣接する点i25〜i34(図8では二重点)と解析対象領域の境界線に対して線対称となる仮想的な仮想点81〜88を設定する。そして、境界点用駆動力計算部118は、境界点i21〜i24と、その境界点i21〜i24に隣接する点25〜i34と、設定した仮想点81〜88とにより定まる円弧91〜98の曲率中心Oa〜Oh及び曲率半径Ri(t)を計算する。このようにして計算される曲率中心Oa〜Ohは、解析対象領域の境界線上に位置することになる。
次に、境界点用駆動力計算部118は、計算対象の境界点iに属する粒界uの単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。
次に、境界点用駆動力計算部118は、曲率半径Ri(t)と、単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点iに生じる駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点iから曲率中心Oに向かう方向を計算し、計算した方向に対応する解析対象領域の境界線上の方向を、境界点iに生じる駆動力Fi(t)の方向として決定する。前述したように、曲率中心Oa〜Ohは、解析対象領域の境界線上に位置するので、境界点iは、当該境界線上を移動することになる。
【0052】
より具体的に説明すると、境界点iが、単点の場合には、図8(a)の左図に示すように、境界点用駆動力計算部118は、境界点i21と、二重点i25と、仮想点81とにより定まる円弧91の曲率中心Oa及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i21に属する粒界u(結晶粒A16、A17の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点iに生じる駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i21から曲率中心Oaに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i21に生じる駆動力Fi(t)の方向として決定する。こうして、図8(a)の右図に示すように、境界点i21は、解析対象領域の境界線上に沿って移動し、新たな境界点i21'となる。
【0053】
境界点iが二重点の場合には、図8(b)の左図に示すように、境界点用駆動力計算部118は、境界点i22と、二重点i26と、仮想点82とにより定まる円弧92の曲率中心Ob及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i22に属する第1の粒界u(結晶粒A18、A19の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i22に生じる第1の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i22から曲率中心Obに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i22に生じる第1の駆動力Fi(t)の方向として決定する。
【0054】
更に、境界点用駆動力計算部118は、境界点i22と、二重点i27と、仮想点83とにより定まる円弧93の曲率中心Oc及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i22に属する第2の粒界u(結晶粒A19、A20の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i22に生じる第2の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i22から曲率中心Ocに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i22に生じる第2の駆動力Fi(t)の方向として決定する。
以上のようして、図8(b)の右図に示すように、二重点である境界点i22は、2つの境界点i22'、i22''に分裂する。
【0055】
境界点iが三重点の場合には、図8(c)の左図に示すように、境界点用駆動力計算部118は、境界点i23と、二重点i28と、仮想点84とにより定まる円弧94の曲率中心Od及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i23に属する第1の粒界u(結晶粒A21、A22の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i23に生じる第1の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i23から曲率中心Odに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i23に生じる第1の駆動力Fi(t)の方向として決定する。
【0056】
そして、境界点用駆動力計算部118は、境界点i23と、二重点i29と、仮想点85とにより定まる円弧95の曲率中心Oe及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i23に属する第2の粒界u(結晶粒A22、A23の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i23に生じる第2の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i23から曲率中心Oeに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i23に生じる第2の駆動力Fi(t)の方向として決定する。
【0057】
更に、境界点用駆動力計算部118は、境界点i23と、二重点i30と、仮想点86とにより定まる円弧96の曲率中心Of及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i23に属する第3の粒界u(結晶粒A23、A24の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i23に生じる第3の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i23から曲率中心Ofに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i23に生じる第3の駆動力Fi(t)の方向として決定する。
以上のようして、図8(c)の右図に示すように、三重点である境界点i23は、3つの境界点i23'、i23''、i23'''に分裂する。
【0058】
以上は、境界点iが、解析対象領域の四隅(角)にない場合における駆動力Fi(t)の計算方法の一例である。一方、境界点iが、解析対象領域の四隅(角)にある場合には、境界点iに隣接する点と解析対象領域の境界線に対して線対称となる仮想点が2つ存在する。そこで、本実施形態では、前記線対称となる仮想点の2つの夫々について、前述したようにして駆動力Fi(t)を求め、求めた駆動力Fi(t)のうち、大きい方の駆動力Fi(t)を採用するようにしている。ここで、図8(d)を参照しながら、解析対象領域の四隅にある境界点iが単点である場合を例に挙げて、解析対象領域の四隅にある境界点iに生じる駆動力Fi(t)の計算方法の一例を説明する。
【0059】
図8(d)の左図に示すように、解析対象領域の四隅にある境界点i24に隣接する点34と解析対象領域の境界線に対して線対称となる仮想点は2つある(点87、88)。そこで、まず、境界点用駆動力計算部118は、境界点i24と、二重点i34と、仮想点87とにより定まる円弧97の曲率中心Og及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i24に属する第1の粒界u(結晶粒A16、A25の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i24に生じる第1の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i24から曲率中心Ogに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i24に生じる第1の駆動力Fi(t)の方向として決定する。
【0060】
更に、境界点用駆動力計算部118は、境界点i24と、二重点i37と、仮想点88とにより定まる円弧98の曲率中心Oh及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i24に属する第2の粒界u(結晶粒A16、A25の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i24に生じる第2の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i24から曲率中心Ohに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i24に生じる第2の駆動力Fi(t)の方向として決定する。
【0061】
そして、境界点用駆動力計算部118は、計算した第1の駆動力Fi(t)と第2の駆動力Fi(t)とのうち、大きさが大きい方の駆動力Fi(t)を採用する。図8(d)に示す例では、第1の駆動力Fi(t)の方が、第2の駆動力Fi(t)よりも大きさが大きいものとする。そうすると、図8(d)の右図に示すように、境界点i24は、解析対象領域の境界線上に沿って移動し、新たな境界点i24'となる。
本実施形態では、以上のようにすることによって、境界点iと、当該境界点iと隣接する点とを最短距離で相互に結ぶラインpの長さが、境界点iを移動する前よりも短くなるように、境界点iを移動させるようにしている。
【0062】
図3の説明に戻り、位置計算部116は、単点i、二重点i、及び三重点iの時間の経過に伴う位置の変化を計算する。
まず、境界点iと、境界点iでない二重点iの時間の経過に伴う位置の変化を計算する方法の一例を説明する。
位置計算部116は、二重点用駆動力計算部114により計算された駆動力Fi(t)を示すベクトル(計算対象の点iに生じる駆動力Fi(t)を示すベクトル)を取得する。また、位置計算部116は、計算対象の点iが属する粒界uの易動度Miを、易動度設定部111から取得する。
ここで、計算対象の点iが境界点である場合であって、二重点(三重点)である場合、位置計算部116は、計算対象の点iが属する粒界uの易動度Miを2つ(3つ)取得することになる。図8(b)に示す例では、結晶粒A18、A19の粒界uの易動度Mi1と、結晶粒A19、A20の粒界uの易動度Mi2とを取得する。また、図8(c)に示す例では、結晶粒A21、A22の粒界uの易動度Mi1と、結晶粒A22、A23の粒界uの易動度Mi2と、結晶粒A23、A24の粒界uの易動度Mi3とを取得する。
【0063】
そして、位置計算部116は、計算対象の点iが属する粒界uの易動度Miと、計算対象の点iの駆動力Fi(t)を示すベクトルとを、以下の(4)式に代入して、計算対象の点iの速度vi(t)を示すベクトルを計算する。
ここで、計算対象の点iが境界点である場合であって、二重点(三重点)である場合、位置計算部116は、計算対象の点iの速度vi(t)を示すベクトルを2つ(3つ)計算することになる。
【0064】
【数4】
【0065】
その後、位置計算部116は、点設定部103に設定されている「計算対象の点iの現在の位置ri(t)を示すベクトル」を取得する。そして、位置計算部116は、計算対象の点iの速度vi(t)を示すベクトルと、計算対象の点iの現在の位置ri(t)を示すベクトルと、時間Δtとを、以下の(5)式に代入して、現在の時間tからΔt[sec]が経過したときに、計算対象の点iが存在する位置ri(t+Δt)を示すベクトルを計算する。本実施形態では、このようにして、計算対象の点iの時間の経過に伴う位置の変化が計算される。
ここで、計算対象の点iが境界点である場合であって、二重点(三重点)である場合、位置計算部116は、現在の時間tからΔt[sec]が経過したときに、計算対象の点iが存在する位置ri(t+Δt)を示すベクトルを2つ(3つ)計算することになる。
尚、時間Δtは、点iの位置を計算するタイミング(間隔)を規定するものであり、解析対象となる電磁鋼鈑の種類や、解析条件、解析精度等に応じて予め定められている。
【0066】
【数5】
【0067】
そして、位置計算部116は、計算対象の点iが存在する位置ri(t+Δt)を示すベクトルを、点設定部103に出力する。このようにすることによって、前述したように、計算対象の点iの現在の位置ri(t)を示すベクトルが、点設定部103で設定される。
【0068】
次に、境界点でない三重点iの時間の経過に伴う位置の変化を計算する方法の一例を説明する。
位置計算部116は、位置計算部116は、計算対象の三重点iが属する3つの粒界uの易動度Mi1〜Mi3を、易動度設定部111から取得する。
【0069】
そして、位置計算部116は、計算対象の三重点iが属する3つの粒界uの易動度Mi1〜Mi3を用いて、計算対象の三重点iの易動度Miを計算する。具体的に、位置計算部116は、計算対象の三重点iから点1、2、3に向かう方向を有する単位ベクトル(dij(t)/|dij(t)|)と、計算対象の三重点iが属する3つの粒界uの易動度Mi1〜Mi3とを、以下の(6)式に代入して、計算対象の三重点iの易動度Miを計算する。
【0070】
【数6】
【0071】
尚、(6)式において、jは、計算対象の三重点iに隣接する3つの点を識別するための変数である。
また、位置計算部116は、三重点用駆動力計算部115により計算された駆動力Fi(t)を示すベクトル(計算対象の三重点iに生じる駆動力Fi(t)を示すベクトル)を取得する。そして、位置計算部116は、計算対象の三重点iが属する粒界uの易動度Miと、計算対象の三重点iの駆動力Fi(t)を示すベクトルとを、前述した(4)式に代入して、計算対象の三重点iの速度vi(t)を示すベクトルを計算する。
【0072】
その後、位置計算部116は、点設定部103に設定されている「計算対象の三重点iの現在の位置ri(t)を示すベクトル」を取得する。そして、位置計算部116は、計算対象の三重点iの速度vi(t)を示すベクトルと、計算対象の三重点iの現在の位置ri(t)を示すベクトルと、時間Δtとを、前述した(5)式に代入して、現在の時間tからΔt[sec]が経過したときに、計算対象の三重点iが存在する位置ri(t+Δt)を示すベクトルを計算する。本実施形態では、このようにして、計算対象の三重点iの時間の経過に伴う位置の変化が計算される。尚、前述したように、時間Δtは、点iの位置を計算するタイミング(間隔)を規定するものであり、解析対象となる電磁鋼鈑の種類や、解析条件、解析精度等に応じて予め定められている。
【0073】
そして、位置計算部116は、計算対象の三重点iが存在する位置ri(t+Δt)を示すベクトルを、点設定部103に出力する。このようにすることによって、前述したように、計算対象の三重点iの現在の位置ri(t)を示すベクトルが、点設定部103で設定される。
【0074】
解析時間設定部112は、位置計算部116において、解析完了時間Tが経過したとき、又は解析完了時間Tが経過した後の位置ri(t+Δt)が、位置計算部116に計算されたか否かを判定することによって、解析完了時間Tまで解析が終了したか否かを判定する。
【0075】
解析画像表示部117は、解析時間判別部112により、解析完了時間Tまで解析が終了したと判定されると、位置計算部116により計算された「点iの位置ri(t+Δt)のベクトル」に基づいて、時間tが0(ゼロ)からT[sec]までの間に、結晶粒Aの状態がどのように推移するのかを示す画像を、表示装置200に表示させる。
【0076】
次に、図9のフローチャートを参照しながら、結晶粒解析装置110が行う処理動作の一例を説明する。尚、ユーザによる操作装置300の操作に基づいて、CPUが、ROMやハードディスクから制御プログラムを読み出して実行を開始することにより、図9に示すフローチャートの処理が開始される。
【0077】
まず、図9−1のステップS1において、結晶画像取得部101は、電磁鋼鈑の結晶粒Aの画像信号と、その画像信号に含まれる各結晶粒Aの方位ξを示す信号とが入力されるまで待機する。電磁鋼鈑の結晶粒Aの画像信号(結晶粒画像信号)と、その画像信号に含まれる各結晶粒Aの方位ξを示す信号とが入力されると、ステップS2に進む。
このように本実施形態では、例えば、ステップS1の処理を行うことにより、画像信号取得手段の一例が実現される。
【0078】
ステップS2に進むと、結晶画像表示部102は、ステップS1で取得された結晶粒画像信号に基づく結晶粒画像31を、表示装置200に表示させる。このとき、結晶画像表示部102は、解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)と、解析完了時間Tとの入力をユーザに促すための画像も表示装置200に表示させる。そして、ここでは、解析温度θ(t)と、解析完了時間Tとが順次入力された後に、結晶粒画像31を参照しながらユーザが点i(単点、二重点、又は三重点)を指定できるようにする場合を例に挙げて説明する。
【0079】
次に、ステップS3において、解析温度設定部106は、ユーザによる操作装置300の操作に基づいて、解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)が入力されるまで待機する。そして、解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)が入力されると、ステップS4に進む。ステップS4に進むと、解析温度設定部106は、入力された解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)を、RAM又はハードディスクに設定する。尚、図9のフローチャートでは、解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)が、一定値である場合を例に挙げて説明する。
【0080】
次に、ステップS5において、解析時間設定部112は、ユーザによる操作装置300の操作に基づいて、解析完了時間Tが入力されるまで待機する。そして、解析完了時間Tが入力されると、ステップS6に進む。ステップS6に進むと、解析時間設定部112は、入力された解析完了時間Tを、RAM又はハードディスクに設定する。
次に、ステップS7において、点設定部103は、結晶画像表示部102により表示された結晶粒画像に対して、点i(単点、二重点、又は三重点)が指定されるまで待機する。前述したように、本実施形態では、解析対象領域の境界線上では、単点、二重点、及び三重点の何れもが指定可能であるが、解析対象領域の境界線以外では、二重点及び三重点の何れかが指定可能となっている。
【0081】
以上のようにして、点i(単点、二重点、又は三重点)が指定されると、ステップS8に進む。ステップS8に進むと、点設定部103は、ステップS7で指定されたと判定した点iの位置ri(t)を示すベクトルを計算して、RAM又はハードディスクに設定する。
このように本実施形態では、例えば、ステップS8の処理を行うことにより、点設定手段の一例が実現される。
次に、ステップS9において、点設定部103は、ユーザによる操作装置300の操作に基づいて、点(単点、二重点、又は三重点)iを指定する作業の終了指示がなされたか否かを判定する。この判定の結果、点iを指定する作業の終了指示がなされていない場合には、ステップS7に戻り、既に指定された点(単点、二重点、又は三重点)iと別の点(単点、二重点又は三重点)iが指定されるまで待機する。
一方、点iを指定する作業の終了指示がなされた場合には、ステップS10に進む。ステップS10に進むと、点設定部103は、ステップS7で指定されたと判定した点(単点、二重点、又は三重点)iの数(すなわち、ステップS7の処理を行った回数)NIを計算して、RAM又はハードディスクに設定する。
【0082】
次に、ステップS11において、ライン設定部104は、ステップS8で設定された点(単点、二重点、又は三重点)iのうち、同一の粒界u上で互いに隣接する2つの点iにより特定されるラインpを、RAM又はハードディスクに設定する。すなわち、ライン設定部104は、ラインpを、そのラインpを特定する2つの点iにより定義する。例えば、図4(c)に示したラインp1は、以下の(6)式のように定義される。
p1={i1,i2} ・・・(6)
【0083】
次に、ステップS12において、粒界設定部105は、ステップS11で設定されたラインpのうち、ステップS8により設定された三重点iを両端として互いに接続されたラインpにより特定される粒界uを、RAM又はハードディスクに設定する。更に、粒界設定部105は、ステップS8により設定された三重点iを一端とし、同様にステップS8により設定された境界点iを他端として互いに接続されたラインpにより特定される粒界uも、RAM又はハードディスクに設定する。すなわち、粒界設定部105は、粒界uを、その粒界uを特定する複数のラインpにより定義する。例えば、図4(c)に示した粒界u1は、以下の(7)式のように定義される。
u1={p1,p2,p3,p4} ・・・(7)
【0084】
次に、ステップS13において、方位設定部107は、ステップS1で入力されたと判定された「結晶粒画像31に含まれる各結晶粒Aの方位ξを示す信号」に基づいて、結晶粒画像31に含まれる全ての結晶粒Aの方位ξを、RAM又はハードディスクに設定する。
次に、ステップS14において、粒界エネルギー設定部109は、ステップS14で設定された結晶粒Aの方位ξと、ステップS4で設定された解析温度θ(t)とに基づいて、粒界エネルギー記憶部108に記憶されたグラフ等から、ステップS12で設定された全ての粒界uの単位長さ当たりの粒界エネルギーγを読み出す。そして、粒界エネルギー設定部109は、読み出した単位長さ当たりの粒界エネルギーγを、RAM又はハードディスクに設定する。
【0085】
次に、ステップS15において、易動度設定部111は、ステップS14で設定された結晶粒Aの方位ξと、ステップS4で設定された解析温度θ(t)とに基づいて、易動度記憶部110に記憶されたグラフ等から、ステップS12で設定された全ての粒界uの易動度Miを読み出す。そして、易動度設定部111は、読み出した易動度Miを、RAM又はハードディスクに設定する。
【0086】
次に、図9−2のステップS16において、点設定部103は、境界点iを分離することにより増える境界点iの数NJに「0(ゼロ)」を設定する。
次に、ステップS17において、点設定部103は、計算対象の点を示す変数iに「1」を設定する。
次に、ステップS18において、解析点判別部113は、計算対象の点を示す変数iにより特定される点(計算対象の点)が、境界点であるか否かを判定する。この判定の結果、計算対象の点が境界点である場合には、後述するステップS22に進む。
【0087】
一方、計算対象の点が境界点でない場合には、ステップS19に進む。ステップS19に進むと、解析点判別部113は、計算対象の点を示す変数iが、計算対象の点の総数NIより小さいか否かを判定する。この判定の結果、計算対象の点を示す変数iが、計算対象の点の総数NIより小さい場合には、現在設定されている全ての点iについて境界点か否かを判定していないと判断し、ステップS20に進む。
【0088】
ステップS20に進むと、点設定部103は、計算対象の点を示す変数iに「1」を加算して、計算対象の点を変更する。そして、変更した点に対して、ステップS18以降の処理を再度行う。
一方、ステップS19において、計算対象の点を示す変数iが、計算対象の点の総数NI以上であると判定された場合には、現在設定されている全ての点iについて境界点か否かを判定したと判断し、ステップS21に進む。ステップS21に進むと、点設定部103は、計算対象の点の総数NIに、境界点iを分離することにより増える境界点iの数NJを加算して、計算対象の点の総数NIを更新する。そして、後述する図9−3のステップS26に進む。
【0089】
ステップS18において、計算対象の点が境界点であると判定された場合には、ステップS22に進む。ステップS22に進むと、解析点判別部113は、計算対象の境界点が、単点か否かを判定する。この判定の結果、計算対象の境界点が、単点である場合には、前述したステップS19に進み、計算対象の点を示す変数iが、計算対象の点の総数NIより小さいか否かを判定する。
【0090】
一方、計算対象の境界点が、単点でない場合には、ステップS23に進む。ステップS23に進むと、解析点判別部113は、計算対象の境界点iが、二重点か否かを判定する。この判定の結果、計算対象の境界点iが、二重点である場合には、ステップS24に進む。ステップS24に進むと、点設定部103は、境界点iを分離することにより増える境界点iの数NJに「1」を加算する。そして、前述したステップS19に進み、計算対象の点を示す変数iが、計算対象の点の総数NIより小さいか否かを判定する。
【0091】
一方、ステップS23の判定の結果、計算対象の境界点が、二重点ではなく三重点である場合には、ステップS25に進む。ステップS25に進むと、点設定部103は、境界点iを分離することにより増える境界点iの数NJに「2」を加算する。そして、前述したステップS19に進み、計算対象の点を示す変数iが、計算対象の点の総数NIより小さいか否かを判定する。
【0092】
以上のようにして、境界点の分離を考慮した計算対象の点の総数NIが決定すると、図9−3のステップS26に進む。ステップS26に進むと、解析時間設定部112は、時間tを「0(ゼロ)」に設定する。
次に、ステップS27において、解析点判別部113は、計算対象の点を示す変数iを「1」に設定する。これにより計算対象の点iが設定される。
【0093】
次に、ステップS28において、解析点判別部113は、計算対象の点が、境界点か否かを判定する。この判定の結果、計算対象の点が、境界点である場合には、後述する図9−4のステップS46に進む。
一方、計算対象の点が、境界点でない場合には、ステップS29に進む。ステップS29に進むと、解析点判別部113は、計算対象の点iが、二重点か否かを判定する。この判定の結果、計算対象の点が、二重点でなく、三重点である場合には、後述するステップS42に進む。一方、計算対象の点が、二重点である場合には、ステップS30に進む。
ステップS30に進むと、二重点用駆動力計算部114は、計算対象の二重点i、及びその二重点に隣接する2つの点i−1、i+1の情報を、点設定部103から読み出す。そして、二重点用駆動力計算部114は、二重点iと、その二重点iに隣接する2つの点i−1、i+1とにより定まる円弧41の曲率中心O及び曲率半径Ri(t)を計算する。
【0094】
次に、ステップS31において、二重点用駆動力計算部114は、計算対象の点が属する粒界uの単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から読み出す。
次に、ステップS32において、二重点用駆動力計算部114は、ステップS30で計算した曲率半径Ri(t)と、ステップS31で読み出した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、二重点iに生じる駆動力Fi(t)の大きさを計算する。
【0095】
また、二重点用駆動力計算部114は、計算対象の二重点iの現在の位置ri(t)を示すベクトルを点設定部103から読み出す。そして、二重点用駆動力計算部114は、計算対象の二重点iの現在の位置ri(t)を示すベクトルと、ステップS30で計算した曲率中心Oとから、計算対象の二重点iから曲率中心Oに向かう方向を計算し、二重点iに生じる駆動力Fi(t)の方向を決定する。これにより、二重点iに生じる駆動力Fi(t)を示すベクトルが得られる。
【0096】
次に、ステップS33において、位置計算部116は、計算対象の点(二重点)が属する粒界uに対応する易動度Miを、易動度設定部111から読み出す。
次に、ステップS34において、位置計算部116は、計算対象の点の現在の位置ri(t)を示すベクトルを点設定部103から受け取る。
【0097】
次に、ステップS35において、位置計算部116は、ステップS32(又は後述するステップS43、S49)で得られた「計算対象の点に生じる駆動力Fi(t)を示すベクトル」と、ステップS33(又は後述するステップS44、S50)で読み出された「計算対象の点が属する粒界uの易動度Mi」とを、(4)式に代入して、計算対象の点iの速度vi(t)を示すベクトルを計算する。
そして、位置計算部116は、計算対象の点iの速度vi(t)を示すベクトルと、計算対象の点の現在の位置ri(t)を示すベクトルと、時間Δtとを、(5)式に代入して、現在の時間tからΔt[sec]が経過したときに、計算対象の点iが存在する位置ri(t+Δt)を示すベクトルを計算する。
【0098】
次に、ステップS36において、解析点判別部113は、計算対象の点を示す変数iが、計算対象の点の総数NIより小さいか否かを判定する。この判定の結果、計算対象の点を示す変数iが、計算対象の点の総数NIより小さい場合には、時間t+Δtにおける位置を、現在設定されている全ての点iについて計算していないと判定し、ステップS37に進む。
【0099】
ステップS37に進むと、解析点判別部113は、計算対象の点を示す変数iに「1」を加算して、計算対象の点を変更する。そして、変更した点に対して、ステップS28以降の処理を再度行う。
一方、ステップS36において、計算対象の点を示す変数iが、計算対象の点の総数NI以上であると判定された場合には、時間t+Δtにおける位置を、点設定部103で現在設定されている全ての点iについて計算したと判定し、ステップS38に進む。
【0100】
ステップS38に進むと、位置計算部116は、計算対象の点iが存在する位置ri(t+Δt)を示すベクトルを、点設定部103に出力する。これにより、計算対象の点の現在の位置ri(t)を示すベクトルが、点設定部103で設定(又は更新)される。
次に、ステップS39において、解析時間設定部112は、時間tが、ステップS6で設定した解析完了時間Tよりも大きいか否かを判定する。すなわち、解析完了時間Tが経過したか否かを判定する。この判定の結果、時間tが、ステップS6で設定した解析完了時間Tより大きくない場合(解析完了時間Tが経過していない場合)には、ステップ40に進む。ステップS40に進むと、解析時間設定部112は、現在設定している時間tに時間Δtを加算して、時間tを更新する。そして、ステップS27以降の処理を再度行い、更新した時間tから時間Δtが経過した場合の点iの位置ri(t+Δt)を計算する。
【0101】
一方、ステップS39において、時間tが、ステップS6で設定した解析完了時間Tよりも大きいと判定され場合(解析完了時間Tが経過した場合)には、ステップS41に進む。ステップS41に進むと、解析画像表示部117は、ステップS35で計算された「点iの位置ri(t+Δt)のベクトル」に基づいて、時間tが0(ゼロ)からT[sec]までの間に、結晶粒Aの状態がどのように推移するのかを示す画像を、表示装置200に表示させる。そして、図9のフローチャートを終了する。
【0102】
ステップS29において、計算対象の点が、二重点ではなく、三重点であると判定された場合には、ステップS42に進む。ステップS42に進むと、三重点用駆動力計算部115は、点1、2、3が属する粒界uにおける単位長さ当たりの粒界エネルギーγi1、γi2、γi3の大きさ(絶対値)を、粒界エネルギー設定部109から読み出す。
また、三重点用駆動力計算部115は、計算対象の三重点iと、その三重点iに隣接する3つの点1、2、3の情報を、点設定部103から読み出す。そして、三重点用駆動力計算部115は、計算対象の三重点iから、点1、2、3に向かう方向を有する単位ベクトルを計算する。
【0103】
次に、ステップS43において、三重点用駆動力計算部115は、ステップS42で読み出した「単位長さ当たりの粒界エネルギーγi1、γi2、γi3の大きさ」と、ステップS42で計算した「計算対象の三重点iから、点1、2、3に向かう方向を有する単位ベクトル」とを(3)式に代入して、計算対象の三重点iに生じる駆動力Fi(t)を計算する。
【0104】
次に、ステップS44において、計算対象の点(三重点)が属する3つの粒界uに対応する易動度Mi1〜Mi3を、易動度設定部111から読み出す。
次に、ステップS45において、位置計算部116は、計算対象の三重点が属する3つの粒界uの易動度Mi1〜Mi3と、計算対象の三重点から点1、2、3に向かう方向を有する単位ベクトル(dij(t)/|dij(t)|)とを、(6)式に代入して、計算対象の三重点iの易動度Miを計算する。尚、計算対象の三重点iから点1、2、3に向かう方向を有する単位ベクトルは、ステップS42で計算されたものを使用することができる。そして、前述したステップS34以降の処理を行い、時間t+Δtにおける三重点iの位置ri(t+Δt)のベクトルを前述したようにして計算する。
【0105】
また、ステップS28において、計算対象の点が、境界点であると判定された場合には、図9−4のステップS46に進む。
ステップS46に進むと、境界点用駆動力計算部118は、境界点i21〜i24に隣接する点i25〜i34(図8では二重点)と解析対象領域の境界線に対して線対称となる仮想点81〜88を設定する。
次に、ステップS47において、境界点用駆動力計算部118は、境界点i21〜i24と、その境界点i21〜i24に隣接する点25〜i34と、設定した仮想点81〜88とにより定まる円弧91〜98の曲率中心Oa〜Oh及び曲率半径Ri(t)を計算する。
【0106】
次に、ステップS48において、計算対象の境界点iに属する粒界uの単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。前述したように、境界点iが単点である場合には、その境界点iが属する1つの粒界uの単位長さ当たりの粒界エネルギーγiを取得する。また、境界点iが二重点又は三重点である場合には、ステップS24又はステップS25で分離することになった各境界点iが属する1つの粒界uの単位長さ当たりの粒界エネルギーγiを取得する。
【0107】
次に、ステップS49において、境界点用駆動力計算部118は、ステップS47で計算された曲率半径Ri(t)と、ステップS48で読み出された単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点iに生じる駆動力Fi(t)の大きさを計算する。そして、境界点用駆動力計算部118は、計算対象の境界点iから曲率中心Oに向かう方向を計算し、計算した方向を、境界点iに生じる駆動力Fi(t)の方向として決定する。
【0108】
前述したように、解析対象領域の四隅にない境界点i(単点である境界点i、又は分離される各境界点i)については、境界点iに生じる駆動力Fi(t)が1つ算出される。
一方、解析対象領域の四隅にある境界点iについては、解析対象領域の境界線に対して線対称となる仮想点が2つできるので、線対称となる仮想点の2つの夫々について求めた2つの駆動力Fi(t)のうち、大きい方の駆動力Fi(t)を採用する(図8(d)を参照)。
【0109】
次に、ステップS50において、位置計算部116は、計算対象の境界点iが属する粒界uに対応する易動度Miを、易動度設定部111から読み出す。前述したように、計算対象の点iが境界点である場合であって、元々二重点(三重点)である場合、位置計算部116は、計算対象の分離される各境界点iが属する粒界uの易動度Miを1つ取得することになる。
そして、前述した図9−3のステップS34に進み、位置計算部116は、計算対象の境界点の現在の位置をri(t)示すベクトルを取得する。
以上のように本実施形態では、例えば、ステップS46〜50、S34、S35の処理を行うことにより、境界点位置変更の一例が実現される。そして、例えば、ステップS46の処理を行うことにより、仮想点設定手段の一例が実現され、例えば、ステップS49の処理を行うことにより、駆動力演算手段の一例が実現され、例えば、ステップS34、S35の処理を行うことにより、位置演算手段の一例が実現される。
【0110】
尚、ステップS3で入力される解析温度θ(t)が時間に依存する場合、例えば、ステップS39の後に、ステップS40で設定された時間t+Δtにおける解析温度θ(t+Δt)を読み出し、その解析温度θ(t+Δt)における単位長さ当たりの粒界エネルギーγと易動度Miとを再設定してから、ステップS27以降の処理を行うようにすればよい。
【0111】
次に、以上のような処理を行う結晶粒解析装置100の実施例を説明する。尚、ここでは、チタン(Ti)の目標含有量が0.04[%]の深絞り鋼を製造する場合を例に挙げて説明する。
まず、結晶粒解析装置100による解析結果を適用せずに、(比較対象となる)深絞り鋼を製造した。具体的には、まず、転炉溶製されたスラブを、熱延巻き取り温度が600[℃]となるように熱間圧延した。尚、熱延巻き取り温度のバラツキは、標準偏差で30[℃]であった。そして、このようにして熱間圧延された薄板鋼板を酸洗した後に冷間圧延し、その冷間圧延により圧延された薄板鋼板を、CAPL(Continuous Annealing and Processing Line、連続焼鈍ライン)で850[℃]、5分間焼鈍して、比較対象となる製品を製造した。このようにして製造された製品のうち、r(ランクフォード)値が2.0よりも大きいものを良品、そうでないものを不良品とした。そうすると、歩留まりが97.5[%]以上になった。
【0112】
次に、結晶粒解析装置100による解析を行った。解析を行うためのサンプルを得るために、まず、熱間圧延した後に、前述したように酸洗・冷間圧延した(焼鈍前の)薄板鋼板(1つのコイル)の一部を採取する。採取箇所は、相対的に熱延巻き取り温度が高い部分と、相対的に熱延巻き取り温度が中程度の部分と、相対的に熱延巻き取り温度が低い部分である。そして、それら採取した薄板鋼板を、700[℃]、10秒間焼鈍して3種類のサンプルを得た。図10に、熱延巻き取り温度と、サンプルの数との関係の一例を示す。図10では、熱延巻き取り温度が相対的に低いサンプルがAで示す領域に属し、熱延巻き取り温度が相対的に中程度のサンプルがBで示す領域に属し、熱延巻き取り温度が相対的に高いサンプルがCで示す領域に属していることを表している。尚、以下の説明では、熱延巻き取り温度が相対的に高いサンプル、熱延巻き取り温度が相対的に中程度のサンプル、熱延巻き取り温度が相対的に低いサンプルを、必要に応じて高温サンプル、中温サンプル、低温サンプルと称する。
【0113】
以上のようにして得られた高温サンプル、中温サンプル、低温サンプルを、EBSP法で解析して、サンプルの結晶粒Aの画像信号と、その画像信号に含まれる各結晶粒Aの方位ξを示す信号とを、結晶粒解析装置100に入力した。
次に、焼鈍温度と焼鈍時間とにより定められる焼鈍条件に基づいて、中温サンプルの解析温度θ(t)を結晶粒解析装置100に入力した。そして、中温サンプルを、入力した焼鈍条件で焼鈍した場合に、中温サンプルの結晶粒Aの状態がどのように変化するのかを、前述したようにして結晶粒解析装置100で解析した。そして、解析した結果に基づいて、中温サンプルに対するr値を、別途用意したプログラムを実行することにより計算した。この計算したr値が2.0より大きくなるように、焼鈍条件(すなわち、解析温度θ(t))を変えて、結晶粒解析装置100による解析を繰り返し行った。その結果、計算したr値が2.0より大きくなる「中温サンプルの焼鈍条件」は、図11(a)に示すようになった。
【0114】
そして、中温サンプルに対する解析結果と略同じ解析結果が得られるように、焼鈍条件(すなわち、解析温度θ(t))を変えて、低温サンプル及び高温サンプルに対する解析を繰り返し行い、中温サンプルに対する解析結果と略同じ解析結果が得られる焼鈍条件を決定した。その結果、低温サンプルに対する焼鈍条件は、図11(b)に示すようになり、高温サンプルに対する焼鈍条件は、図11(c)に示すようになった。
【0115】
そして、前述したように酸洗・冷間圧延した(焼鈍前の)薄板鋼板のうち、相対的に熱延巻き取り温度が高い部分の焼鈍条件を、図11(c)に示す焼鈍条件とし、相対的に熱延巻き取り温度が中程度部分の焼鈍条件を、図11(a)に示す焼鈍条件とし、相対的に熱延巻き取り温度が低い部分の焼鈍条件を、図11(b)に示す焼鈍条件として製品を製造した。そして、比較対象の製品と同様に、r(ランクフォード)値が2.0よりも大きいものを良品、そうでないものを不良品とした。その結果、歩留まりが99[%]以上になった。
従って、結晶粒解析装置100による解析を行った結果に基づいて、1つのコイルに対する焼鈍条件を変えることにより、製品の歩留まりが向上することが確認できた。
【0116】
以上のように本実施形態では、結晶粒Aの粒界uの両端点に対応する三重点iに生じる駆動力Fi(t)と、結晶粒Aの中間点に対応する二重点iに生じる駆動力Fi(t)と、解析対象領域の境界線上の境界点iに生じる駆動力Fi(t)を計算し、計算した駆動力Fi(t)に基づいて、各点iの位置がどのように移動するかを計算することによって、結晶粒Aがどのように変化するのかを解析するようにした。したがって、結晶粒A(粒界u)の形状を、解析対象領域の境界線における部分を含め、出来るだけ正確に再現できるモデルを容易に構築することができる。よって、結晶粒が時間の経過と共にどのように変化するのかを、従来よりも容易に且つ正確に解析することが可能になる。
【0117】
また、本実施形態では、二重点iの駆動力Fi(t)の大きさを(1)式に従って計算するようにした。すなわち、二重点iの駆動力Fi(t)の大きさを、その二重点iと、その二重点iに隣接する2つの点i+1、i−1とにより定まる円弧41の曲率(曲率半径Ri(t)の逆数)と、その二重点iが属する粒界uの単位長さ当たりの粒界エネルギーの大きさ(絶対値)γiとの積に基づいて決定するようにした。そして、二重点iの駆動力Fi(t)の方向を、その二重点iから、円弧41の曲率中心Oに向かう方向とした。
【0118】
また、本実施形態では、三重点iの駆動力Fi(t)を(3)式に従って計算するようにした。すなわち、三重点iに隣接する点が属する粒界の粒界エネルギーと同じ大きさを持ち、且つその三重点iから、その三重点iに隣接する点に向かう方向を持つベクトルを、その三重点iに隣接する3つの点の夫々について計算し、計算した3つのベクトルのベクトル和を、三重点iの駆動力Fi(t)として決定した。
【0119】
また、本実施形態では、境界点iの駆動力Fi(t)の大きさを二重点iと同様に、(1)式に従って計算するようにした。すなわち、境界点i21〜i24と隣接する点i25〜i34と、解析対象領域に対して線対称となる仮想点81〜88を設定し、これら境界点i21〜i24と、点i25〜i34と、仮想点81〜88とにより定まる円弧91〜98の曲率(曲率半径Ri(t)の逆数)と、その境界点iが属する粒界uの単位長さ当たりの粒界エネルギーの大きさ(絶対値)γiとの積に基づいて、境界点iの駆動力Fi(t)の大きさを決定する。そして、境界点iの駆動力Fi(t)の方向を、その境界点iから、円弧91〜98の曲率中心Oa〜Ohに向かう方向(すなわち、境界線上の方向)に対応する方向とした。更に、境界点iが二重点(三重点)である場合には、それらを分離した各境界点iが属する1つの粒界uの単位長さ当たりの粒界エネルギーを用いて夫々1つずつ駆動力Fi(t)を計算し、計算した駆動力Fi(t)に基づいて、境界点iを2つ(3つ)の単点に分離するようにした。
【0120】
したがって、境界点iを含む各点iが時間の経過と共に移動する様子を、大きな計算負荷をかけることなく、出来るだけ正確に解析することができる。そして、境界点iについては、周期的境界条件といった、実際とは異なる制限を受けた近似を行うことなく、移動する様子を解析することができる。よって、所望の電磁鋼鈑を、結晶粒解析装置100により解析した結果を、その電磁鋼鈑を製造するための操業条件に反映させることにより、操業時間の短縮や、製品の歩留まりの向上等を実現することができ、製品の納期短縮や、製品のコスト削減等を実現することができる。
【0121】
尚、本実施形態では、ユーザが、結晶粒画像31を見ながら、操作装置300を使用して、点iを指定する場合を例に挙げて説明したが、必ずしもこのようにする必要はない。例えば、EBSP法で解析することにより得られた結晶粒画像信号に基づいて、結晶粒解析装置100(コンピュータ)が自動的に、点iを指定するようにしてもよい。この場合、粒界uの長さに応じて二重点iの数を異ならせたり、粒界uの曲率に応じて二重点iの数を異ならせたり(例えば、直線的な部分よりも凸凹している部分に多くの二重点iを指定したり)することができる。また、境界点iについても、解析対象領域の境界線と粒界とが交わっている点に基づいて、結晶粒解析装置100(コンピュータ)が自動的に指定することができる。
【0122】
また、本実施形態では、粒界設定部105により、粒界uを定義するようにしたが、点i、ラインp、及び結晶粒Aを用いれば、粒界uは自ずと定まるので、必ずしも粒界uを定義する必要はない。
また、本実施形態では、粒界エネルギー設定部109、易動度設定部111は、粒界uを介して互いに隣接する2つの結晶粒Aの方位ξの差分Δξの絶対値に基づいて、単位長さ当たりの粒界エネルギーγ、易動度Miを設定するようにしたが、粒界uを介して互いに隣接する2つの結晶粒Aの方位ξの差分Δξそのものに基づいて、単位長さ当たりの粒界エネルギーγ、易動度Miを設定するようにしてもよい。
また、図9−3のフローチャートにおいて、ステップS40で時間を更新しているので、計算負荷を軽減するために、ステップ38の処理を行わないようにしてもよい。
【0123】
また、本実施形態では、(6)式を用いて、計算対象の三重点iにおける易動度Miを求めるようにしたが、計算対象の三重点iが属する3つの粒界uに対応する易動度Mi1〜Mi3を用いて、計算対象の三重点iの易動度Miを求めるようにしていれば、必ずしもこのようにする必要はない。例えば、以下の(8)式を用いて、計算対象の三重点iにおける易動度Miを求めるようにしてもよい。
【0124】
【数7】
【0125】
また、境界点iに生じる駆動力Fi(t)を算出する方法は、前述した方法に限定されるものではない。例えば、図12に示すようにして駆動力Fi(t)を算出することができる。図12は、解析対象領域の境界線上にある境界点に生じる駆動力Fi(t)の計算方法の他の例を説明する図である。尚、図12(a)は、図4に示した領域33に対応する図であり、図12(b)は、領域34に対応する図であり、図12(c)は、領域35に対応する図であり、図12(d)は、領域36に対応する図である。
【0126】
図12(a)に示すように、境界点iが単点である場合には、以下の(9)式により、境界点iに生じる駆動力Fij(t)を求めることができる。また、図12(b)に示すように、境界点iが二重点である場合には、以下の(10)式、(11)式により、境界点iに生じる駆動力Fik(t)、Fil(t)を求めることができる。また、図12(c)に示すように、境界点iが三重点である場合には、以下の(12)式〜(14)式により、境界点iに生じる駆動力Fim(t)、Fin(t)、Fio(t)を求めることができる。更に、境界点iが、解析対象領域の四隅にある単点である場合には、以下の(15)式により、境界点iに生じる駆動力Fi(t)を求めることができる。
【0127】
ここで、γiは、単位長さ当たりの粒界ベクトルである。例えば、図12(a)に示す例では、γijは、結晶粒A16、A17の粒界uにおける単位長さ当たりの粒界ベクトルであり、その方向は、点i21から点i25に向かう方向である。また、τは、解析対象領域の境界線に平行な単位ベクトルである。(15)式のτ1は、解析対象領域の垂直方向の境界線に平行な単位ベクトルであり、τ2は、解析対象領域の水平方向の境界線に平行な単位ベクトルである。また、ηは、解析対象領域の境界線における摩擦力に相当する力であり、予め設定されるものである。
【0128】
【数8】
【0129】
また、本実施形態では、境界点iが単点、二重点、及び三重点の場合を例に挙げて示したが、境界点iがm重点(mは4以上の整数)である場合でも、二重点及び三重点のときと同様にして、時間の経過に伴う位置の変更を行うことができる。この場合、境界点iの数はm個に分裂するので、このような境界点iを移動させる場合には、計算対象の点の総数NIを(m−1)個増やして処理を行うことになる。
【0130】
また、前述した実施例では、結晶粒解析装置100が解析する材料の一例である電磁鋼鈑として、薄板鋼板を例に挙げて説明したが、結晶粒解析装置100が解析する材料は、このようなものに限定されない。例えば、形状は、薄板に限定されず、厚板、線材等であってもよい。また、電磁鋼板の他に、ステンレス、チタン、アルミニウム等、全ての金属材料を適用することができる。尚、結晶粒解析装置100が解析する材料が異なる場合には、粒界エネルギー記憶部108や易動度記憶部110に記憶されるグラフ等の内容等、結晶粒解析装置100に入力されるデータが、材料に応じて異なることになる。
【0131】
以上説明した本発明の実施形態のうち、CPUが実行する部分は、コンピュータがプログラムを実行することによって実現することができる。また、プログラムをコンピュータに供給するための手段、例えばかかるプログラムを記録したCD−ROM等のコンピュータ読み取り可能な記録媒体、又はかかるプログラムを伝送する伝送媒体も本発明の実施形態として適用することができる。また、上記プログラムを記録したコンピュータ読み取り可能な記録媒体などのプログラムプロダクトも本発明の実施の形態として適用することができる。上記のプログラム、コンピュータ読み取り可能な記録媒体、伝送媒体及びプログラムプロダクトは、本発明の範疇に含まれる。
また、前述した実施形態は、何れも本発明を実施するにあたっての具体化の例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその技術思想、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【図面の簡単な説明】
【0132】
【図1】本発明の実施形態を示し、結晶粒解析装置で行われる解析方法の一例を概念的に示す図である。
【図2】本発明の実施形態を示し、解析対象領域付近において結晶粒をモデル化した様子の一例を示す図である。
【図3】本発明の実施形態を示し、結晶粒解析装置の機能構成の一例を示すブロック図である。
【図4】本発明の実施形態を示し、結晶粒画像と、二重点及び三重点と、ライン及び粒界との一例を示す図である。
【図5】本発明の実施形態を示し、解析対象領域の境界線上に設定される点と、解析対象領域の境界線を含む位置に設定されるライン及び粒界の一例を示す図である。
【図6】本発明の実施形態を示し、二重点に生じる駆動力の計算方法の一例を説明する図である。
【図7】本発明の実施形態を示し、三重点に生じる駆動力の計算方法の一例を説明する図である。
【図8】本発明の実施形態を示し、解析対象領域の境界線上にある点に生じる駆動力の計算方法の一例を説明する図である。
【図9−1】本発明の実施形態を示し、結晶粒解析装置が行う処理動作の一例を説明するフローチャートである。
【図9−2】本発明の実施形態を示し、図9−1に続くフローチャートである。
【図9−3】本発明の実施形態を示し、図9−2に続くフローチャートである。
【図9−4】本発明の実施形態を示し、図9−3に続くフローチャートである。
【図10】本発明の実施形態を示し、熱延巻き取り温度と、サンプルの数との関係の一例を示す図である。
【図11】本発明の実施形態を示し、1つのコイルに対する焼鈍条件であって、相対的に熱延巻き取り温度が中程度の部分の焼鈍条件と、相対的に熱延巻き取り温度が高い部分の焼鈍条件と、相対的に熱延巻き取り温度が低い部分の焼鈍条件との一例を示す図である。
【図12】本発明の実施形態を示し、解析対象領域の境界線上にある境界点に生じる駆動力の計算方法の他の例を説明する図である。
【符号の説明】
【0133】
100 結晶粒解析装置
101 結晶画像取得部
102 結晶画像表示部
103 点設定部
104 ライン設定部
105 粒界設定部
106 解析温度設定部
107 方位設定部
108 粒界エネルギー記憶部
109 粒界エネルギー設定部
110 易動度記憶部
111 易動度設定部
112 解析時間設定部
113 解析点判別部
114 二重点用駆動力計算部
115 三重点用駆動力計算部
116 位置計算部
118 境界点用駆動力計算部
200 表示装置
300 操作装置
a 結晶粒
i 二重点、三重点、境界点
p ライン
u 粒界
【技術分野】
【0001】
本発明は、結晶粒解析装置、結晶粒解析方法、及びコンピュータプログラムに関し、特に、結晶粒の状態を解析するために用いて好適なものである。
【背景技術】
【0002】
従来から、金属材料の結晶粒の状態をコンピュータで解析することが行われている。
特許文献1には、圧延された薄板鋼板を焼鈍して一次再結晶化し、一次再結晶化した薄板鋼板を仕上げ焼鈍して、二次再結晶化した薄板鋼板を得るための技術が開示されている。かかる技術では、一次再結晶化した結晶粒の粒径の分布を統計的に求める。そして、その一次再結晶化した結晶粒の粒径の分布を用いて、一次再結晶化した個々の結晶粒の粒界エネルギーの積分値(積分粒界エネルギー)を求め、求めた結果を用いて一次再結晶化した結晶粒の最適な分布を推定する。そして、特許文献1では、このようにして推定した分布となるように、一次再結晶化した結晶粒を得るようにすれば、適正に二次再結晶化した薄板鋼板が得られることになるとしている。
【0003】
また、特許文献2には、結晶粒の両端点を結ぶ直線で粒界を近似し、その結晶粒の両端点における一定時間毎の移動を追跡することにより、結晶粒の成長の時間変化を数値計算によりシミュレートすることが開示されている。
また、特許文献3には、均熱工程におけるAlスラブ、あるいは焼鈍工程におけるAl板材の各工程における初期結晶粒径、保持温度、保持時間と、試験片から得られた種々の係数を所定の計算式に代入して、結晶が成長した後の粒径を算出することが開示されている。
【0004】
更に、特許文献4には、鋼片のサイズ、成分情報及び圧延条件に基づいて圧延後のオーステナイト粒径及び平均転位密度を算出し、算出した結果と冷却条件とに基づいて、変態組織の構成各相の分率、平均生成温度及び結晶粒径を算出し、更にその後の熱処理条件に基づいて最終組織を構成する各相の分率、粒径、炭化物・析出物サイズを算出することが開示されている。
【0005】
【特許文献1】特開平6−158165号公報
【特許文献2】特開平7−97290号公報
【特許文献3】特開2002−224721号公報
【特許文献4】特開平5−87800号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、一次再結晶化した結晶粒は、二次再結晶化される際に種々の挙動をとりながら成長する。
しかしながら、特許文献1に記載の技術では、一次再結晶化した結晶粒について着目し、一次再結晶化した結晶粒が、二次再結晶化されるまでの挙動について考慮していない。したがって、結晶粒が時間の経過と共にどのように変化していくのかについての正確な知見を得ることが困難であった。また、前述した従来の技術では、一次再結晶化した結晶粒の粒径の分布を統計的に求めるので、事前の製造・試験等に基づいた多くのデータが必要であった。したがって、結晶粒の状態を簡便に解析することが困難であるという問題点があった。
【0007】
また、特許文献2に記載の技術では、粒界を一つの直線で近似しているので、粒界の形
状を正確に表現することができない。したがって、結晶粒の時間的な変化の評価精度が極端に低くなってしまうという問題点があった。
また、特許文献3に記載の技術では、結晶粒径の計算モデルが開示されているだけである。したがって、具体的にどのような形状となって結晶粒が時間の経過と共に変化するのかを解析することが困難であるという問題点があった。
また、特許文献4に記載の技術では、具体的にどのようなモデルを用いて、結晶粒成長の計算を行うのかが示されていないという問題点があった。
【0008】
特に、金属材料の結晶粒の状態をコンピュータで解析する場合には、金属材料全体ではなく一部の領域を切り出し、切り出した領域について解析することになる。したがって、解析する対象となる領域(解析対象領域)の境界(端)の部分における状態も考慮して解析を行う必要がある。しかしながら、前述した従来の技術では、解析対象領域の境界線の部分に対して適切な検討を行っていないため、解析対象領域の境界線の部分において結晶粒が時間の経過と共にどのように変化するのかを正確に解析することが困難であるという問題点があった。
【0009】
本発明はこのような問題点に鑑みてなされたものであり、解析対象領域の境界線の部分において結晶粒が時間の経過と共にどのように変化するのかを、従来よりも正確に解析できるようにすることを目的とする。
【課題を解決するための手段】
【0010】
本発明の結晶粒解析装置は、金属材料における結晶の画像信号を取得する画像信号取得手段と、前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定手段と、前記点設定手段により設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更手段とを有することを特徴とする。
【0011】
本発明の結晶粒解析方法は、金属材料における結晶の画像信号を取得する画像信号取得ステップと、前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定ステップと、前記点設定ステップにより設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更ステップとを有することを特徴とする。
【0012】
本発明のコンピュータプログラムは、金属材料における結晶の画像信号を取得する画像信号取得ステップと、前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定ステップと、前記点設定ステップにより設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更ステップとをコンピュータに実行させることを特徴とする。
【発明の効果】
【0013】
本発明によれば、境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、境界点の位置を変更するようにした。したがって、解析対象領域の境界線の部分において結晶粒が時間の経過と共にどのように変化するのかを、従来よりも正確に解析できる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照しながら、本発明の一実施形態を説明する。尚、本実施形態では、結晶粒の解析対象である金属材料(例えば単相金属材料)として、電磁鋼鈑を適用した場合を例に挙げて説明する。
図1は、本実施形態の結晶粒解析装置で行われる解析方法の一例を概念的に示す図である。尚、図1では、説明の都合上、電磁鋼鈑を構成する多数の結晶粒のうち、1つの結晶粒Aのみを示しているが、実際には、多数の結晶粒により電磁鋼鈑が形成されるということは言うまでもない。
【0015】
本実施形態の結晶粒解析装置では、図1に示すようにして、結晶粒をモデル化するようにしている。
まず、図1(a)に示すように、結晶粒Aの3つの粒界ua〜ucの両端点に対応する位置に三重点ia、ie、ifを設定し、粒界ua〜ucの中間点に対応する位置に二重点ib〜id、ig〜iiを設定する。ここで、三重点ia、ie、ifとは、3つのラインpが交わる点(ここでは、3つの結晶粒と接する点)をいい、二重点ib〜id、ig〜iiとは、2つのラインpが交わる点(ここでは、2つの結晶粒と接する点)をいう。そして、同一の粒界ua〜uc上で互いに隣接する点(粒界点)iを互いに結ぶ直線(ライン)を設定する。
以上のように、本実施形態では、粒界ua〜ucの両端の位置だけでなく、粒界ua〜ucの途中の形状も出来るだけ忠実に表すことができるように、二重点ib〜id、ig〜iiを設定するようにしている。
【0016】
以上のようにしてモデル化された結晶の各点(二重点及び三重点)ia〜iiの夫々について、時間tで生じる駆動力Fi(t)[N]を算出する。そして、算出した駆動力Fi(t)に基づいて、Δt[sec]が経過した後(時間t+Δt)における各点(二重点及び三重点)ia〜iiの位置を算出する。そうすると、図1(a)に示す各点(二重点及び三重点)ia〜iiの位置は、例えば、図1(b)に示す位置に移動する。
【0017】
また、本実施形態の結晶粒解析装置では、以上のようにしてモデル化したラインが解析対象領域の境界線と交わる点を設定するようにしている。図2は、解析対象領域付近において結晶粒をモデル化した様子の一例を示す図である。
図2に示すように、本実施形態では、1つのラインpが解析対象領域の境界線と交わる点(ここでは、2つの結晶粒A1、A2と接する点)を単点ipとして設定し、2つのラインpが解析対象領域の境界線と交わる点(ここでは、3つの結晶粒A3〜A5と接する点)を二重点iqとして設定し、3つのラインが解析対象領域の境界線と交わる点(ここでは、4つの結晶粒A6〜A9と接する点)を三重点irとして設定する。
以上のように、本実施形態では、解析対象領域の境界線によって区画されない部分に加えて、解析対象領域の境界線によって区画される部分についても、点を設定するようにしている。尚、以下の説明では、ラインが解析対象領域の境界線と交わる点を、その他の点と表記を区別するために、必要に応じて境界点と称する。
【0018】
本実施形態の結晶粒解析装置では、以上のように、結晶粒Aに含まれる粒界ua〜ucの両端点に対応する三重点ia、ie、ifと、粒界ua〜ucの中間点に対応する二重点ib〜id、ig〜iiと、ラインが解析対象領域の境界線と交わる単点ip、二重点iq、及び三重点irとの夫々に生じる駆動力Fi(t)を算出して、三重点ia、ie、ifと、二重点ib〜id、ig〜iiと、単点ip、二重点iq、及び三重点irとが移動する様子を解析する。これにより、例えば、図1(a)に示す結晶粒Aaが、図1(b)に示す結晶粒Abのように、時間の経過と共に変化する様子を、大きな計算負荷をかけることなく出来るだけ正確に解析することができる。尚、解析対象領域の境界線における結晶粒の挙動については、図8等を用いて後述する。
【0019】
以下に、結晶粒解析装置の構成について詳細に説明する。
図3は、結晶粒解析装置の機能構成の一例を示すブロック図である。尚、結晶粒解析装置100のハードウェアは、パーソナルコンピュータ等、CPU、ROM、RAM、ハードディスク、画像入出力ボード、各種インターフェース、及びインターフェースコントローラ等を備えた情報処理装置を用いて実現することができる。そして、特に断りのない限り、図3に示す各ブロックは、CPUが、ROMやハードディスクに記憶されている制御プログラムを、RAMを用いて実行することにより実現される。そして、図3に示す各ブロック間で、信号のやり取りを行うことにより、以下の処理が実現される。
【0020】
図3において、結晶画像取得部101は、例えば、EBSP(Electron Back Scattering Pattern)法で得られた「電磁鋼鈑の結晶粒Aの画像信号と、その画像信号に含まれる各結晶粒Aの方位ξを示す信号」等を取得して、ハードディスク等に記憶するためのものである。尚、以下の説明では、電磁鋼鈑の結晶粒Aの画像を、必要に応じて、結晶粒画像と称する。尚、結晶画像取得部101は、EBSP法による結晶分析を行う分析装置から、前述した信号を直接取得するようにしてもよいし、DVDやCD−ROM等のリムーバル記憶媒体から、前述した信号を間接的に取得してもよい。
【0021】
結晶画像表示部102は、例えば、ユーザによる操作装置300の操作に基づいて、結晶画像取得部102により取得された結晶粒画像信号に基づく結晶粒画像を、表示装置200に表示させる。尚、表示装置200は、LCD(Liquid Crystal Display)等のコンピュータディスプレイを備えている。また、操作装置300は、キーボードやマウス等のユーザインターフェースを備えている。
【0022】
点設定部103は、結晶画像表示部102により表示された結晶粒画像に対して、ユーザが操作装置300を用いて指定した点(単点、二重点、及び三重点)iを取得し、取得した点(単点、二重点及び三重点)iの数NIと、その点iの初期位置ri(0)を示すベクトルとを、RAM又はハードディスクに設定(記憶)する。尚、本実施形態では、ユーザは、点(単点、二重点及び三重点)iの数と初期位置を、任意に指定することができるものとする。このように本実施形態では、解析対象領域の境界線(結晶粒画像の境界)により区画されない結晶粒A上の点iのみならず、解析対象領域の境界線により区画される結晶粒Aの解析対象領域の境界線上の点iも指定するようにしている。
また、点設定部103は、計算対象の点(単点、二重点又は三重点)iにおけるΔt[sec]後の位置ri(t+Δt)を示すベクトルが、後述するようにして位置計算部116により計算されると、その点iの位置ri(t+Δt)を示すベクトルを、RAM又はハードディスクに設定(記憶)する。
更に、後述するように、解析対象領域の境界線上の境界点として二重点を駆動させる場合には、境界点を2つに分裂させる(図8(b)の右図を参照)。したがって、二重点である境界点iを駆動させる場合、点設定部103は、計算対象の点の総数NIに「1」を加算する。
また、解析対象領域の境界線上の境界点として三重点を駆動させる場合には、境界点を3つに分裂させる(図8(c)の右図を参照)。したがって、三重点である境界点iを駆動させる場合、点設定部103は、計算対象の点の総数NIに「2」を加算する。
【0023】
ライン設定部104は、点設定部103で設定された点(単点、二重点及び三重点)iのうち、同一の粒界u上で互いに隣接する2つの点iにより特定されるラインpに関する情報を、RAM又はハードディスクに設定(記憶)する。このように、ラインpは、同一の粒界u上で互いに隣接する2つの点iを両端とする直線である。
粒界設定部105は、ライン設定部104により設定されたラインpのうち、点設定部103により設定された三重点iを両端として互いに接続されたラインpにより特定される粒界uに関する情報を、RAM又はハードディスクに設定する。更に、粒界設定部105は、ライン設定部104により設定されたラインpのうち、三重点iを一端とし、解析対象領域の境界線上の点(単点、二重点、又は三重点)を他端として互いに接続されたラインpにより特定される粒界uに関する情報も、RAM又はハードディスクに設定する。
【0024】
図4は、結晶画像表示部102により取得される結晶粒画像と(図4(a))、点設定部103により設定される点(二重点及び三重点)iと(図4(b))、ライン設定部104、粒界設定部105により設定されるラインp、粒界u(図4(c))の一例を示す図である。尚、説明の都合上、図4(b)、(c)では、図4(a)に示す結晶粒画像31に含まれる多数の結晶粒Aのうち、領域32内の結晶粒A1に対して設定された点i、ラインp、粒界uのみを示している。
【0025】
図4(a)に示すようにして結晶粒画像31が表示されると、ユーザは、マウス等の操作装置300を用いて、粒界uの両端点に対応する位置を三重点iとして指定すると共に、粒界uの中間点の位置を二重点iとして指定する。そうすると、図4(b)に示すように、例えば、結晶粒A1に対して、二重点i2〜i4、i6〜i10、i12〜i15、i17、i18と、三重点i1、i5、i11、i16とが設定される。
【0026】
そして、これら二重点及び三重点i1〜i18に基づいて、図4(c)に示すように、ラインp1〜p18と、粒界u1〜u4とが設定される。ここで、例えば、ラインp1は、三重点i1と二重点i2とにより特定される。また、粒界u1は、三重点i1、i5を両端として相互に接続されるラインp1〜p4により特定される。
尚、図4(c)に示すように、粒界u1は、結晶粒A1、A2の粒界であり、粒界u2は、結晶粒A1、A5の粒界であり、粒界u3は、結晶粒A1、A4の粒界であり、粒界u4は、結晶粒A1、A3の粒界である。
【0027】
図5は、点設定部103により解析対象領域の境界線上に設定される点(単点、二重点、及び三重点)iと、ライン設定部104、粒界設定部105により解析対象領域の境界線を含む位置に設定されるラインp、粒界uの一例を示す図である。尚、説明の都合上、図5では、図4(a)に示す結晶粒画像31に含まれる多数の結晶粒Aのうち、領域33〜36内の結晶粒A16〜A25に対して設定された点i、ラインp、粒界uのみを示している。ここで、図5(a)は、領域33に対応する図であり、図5(b)は、領域34に対応する図であり、図5(c)は、領域35に対応する図であり、図5(d)は、領域36に対応する図である。
【0028】
ユーザは、マウス等の操作装置300を用いて、解析対象領域の境界線上に、単点、二重点、又は三重点として指定する。このときユーザは、例えば、結晶粒画像31において、解析対象領域の境界線上の点に交わっている粒界の数に応じて、単点、二重点、及び三重点の何れを指定することができる。例えば、結晶粒画像31において、解析対象領域の境界線上の点に交わっている粒界が1つ、2つ、3つであるときに、その点を夫々、単点、二重点、三重点として指定する。
以上のようにして、解析対象領域の境界線上に、単点、二重点、又は三重点が指定されると、図5の左図に示すように、例えば、単点i21、i24と、二重点i22と、三重点i23とが解析対象領域の境界線上に設定される。
【0029】
そして、これら単点、二重点、及び三重点i21〜i24と、前述したようにして粒界uの中間点に対して指定された二重点又は三重点i25〜i34とに基づいて、図5の右図に示すように、ラインp21〜p27と、粒界u21〜u27とが設定される。ここで、例えば、ラインp21は、単点i21と二重点i25とにより特定される。また、粒界u21は、単点i21と、単点i21とラインpを介して繋がっている三重点のうち単点i21に最も近い三重点i(図示せず)とを両端として相互に接続されるラインp(ラインp21等)により特定される。
尚、図5の右図に示すように、粒界u21は、結晶粒A16、A17の粒界であり、粒界u22は、結晶粒A18、A19の粒界であり、粒界u23は、結晶粒A19、A20の粒界である。また、粒界u24は、結晶粒A21、A22の粒界であり、粒界u25は、結晶粒A22、A23の粒界であり、粒界u26は、結晶粒A23、A24の粒界であり、粒界u27は、結晶粒A25、A16の粒界である。
【0030】
解析温度設定部106は、解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)[℃]を、ユーザによる操作装置300の操作に基づいて取得して、RAM又はハードディスクに設定(記憶)する。尚、解析温度設定部106が取得する解析温度θ(t)は、時間に依らない一定値であっても、時間に依存する値であっても(解析温度θ(t)が時間の経過と共に変化するようにしても)よい。
【0031】
方位設定部107は、結晶画像取得部101により取得された「結晶粒画像31に含まれる各結晶粒Aの方位ξを示す信号」に基づいて、結晶粒画像31に含まれる全ての結晶粒Aの方位ξを、RAM又はハードディスクに設定(記憶)する。
【0032】
粒界エネルギー記憶部108は、例えば、単位長さ当たりの粒界エネルギーγ[J/m]と、粒界uを介して互いに隣接する2つの結晶粒Aの方位ξの差分Δξの絶対値と、解析温度θ(t)との関係を示すグラフ、数値列、式、又はそれらの組み合わせを記憶する。尚、以下の説明では、これらグラフ、数値列、式、又はそれらの組み合わせをグラフ等と称する。
例えば、図4(c)に示した粒界u1における「単位長さ当たりの粒界エネルギーγ」は、結晶粒A1の方位ξ1と結晶粒A1の方位ξ2との差分Δξの絶対値と、解析温度設定部106により設定された解析温度θ(t)とに対応した「単位長さ当たりの粒界エネルギーγ」を、粒界エネルギー記憶部108に記憶されたグラフ等から読み出すことにより得られる。尚、以下の説明では、単位長さ当たりの粒界エネルギーγを、必要に応じて粒界エネルギーγと略称する。また、粒界エネルギー記憶部108は、例えば、RAM又はハードディスクを用いて構成される。
【0033】
粒界エネルギー設定部109は、方位設定部107により設定された結晶粒Aの方位ξと、解析温度設定部106により取得された解析温度θ(t)とに基づいて、粒界設定部105により設定された全ての粒界uの粒界エネルギーγを、前述したようにして粒界エネルギー記憶部108に記憶されたグラフ等から読み出す。そして、粒界エネルギー設定部109は、読み出した粒界エネルギーγを、RAM又はハードディスクに設定(記憶)する。
【0034】
易動度記憶部110は、易動度Mi[cm2/(V・sec)]と、粒界uを介して互
いに隣接する2つの結晶粒Aの方位ξの差分Δξの絶対値と、解析温度θ(t)との関係を示すグラフ、数値列、式、又はそれらの組み合わせを記憶する。尚、以下の説明では、これらグラフ、数値列、式、又はそれらの組み合わせをグラフ等と称する。
例えば、図4(c)に示した粒界u1における易動度Miは、結晶粒A1の方位ξ1と結晶粒A2の方位ξ2との差分Δξの絶対値と、解析温度設定部106により取得された解析温度θ(t)とに対応した易動度Miを、易動度記憶部110に記憶されたグラフ等から読み出すことにより得られる。尚、易動度記憶部110は、例えば、RAM又はハードディスクを用いて構成される。
【0035】
易動度設定部111は、方位設定部107により設定された結晶粒Aの方位ξと、解析温度設定部106により取得された解析温度θ(t)とに基づいて、粒界設定部105により設定された全ての粒界uの易動度Miを、前述したようにして易動度記憶部110に記憶されたグラフ等から読み出す。そして、易動度設定部111は、読み出した易動度Miを、RAM又はハードディスクに設定(記憶)する。
【0036】
解析時間設定部112は、例えば、ユーザによる操作装置300の操作に基づいて、解析完了時間T[sec]を取得して、RAM又はハードディスクに設定(記憶)する。そして、解析時間設定部112は、解析完了時間Tが経過するまで、時間tを監視する。
解析点判別部113は、点設定部103により設定された全ての点(二重点及び三重点)iを、計算対象の点として、重複することなく順番に指定する。そして、解析点判別部113は、指定した点iが、二重点であるのか、それとも三重点であるのかを判別する。
【0037】
二重点用駆動力計算部114は、解析点判別部113により、計算対象の点iが解析対象領域の境界線上にない二重点であると判別された場合に、その二重点に生じる駆動力Fi(t)を計算する。
図6は、解析対象領域の境界線上にない二重点に生じる駆動力Fi(t)の計算方法の一例を説明する図である。
【0038】
図6において、二重点iと、その二重点に隣接する2つの点i−1、i+1とにより定まる円弧41の曲率半径をRi(t)[m]とする。また、二重点iが属する粒界uの単位長さ当たりの粒界エネルギーの大きさ(絶対値)をγiとする。そうすると、二重点iに生じる駆動力Fi(t)の大きさは、以下の(1)式で表される。また、二重点iに生じる駆動力Fi(t)の方向は、二重点iから曲率中心Oに向かう方向である。
【0039】
【数1】
【0040】
この(1)式は、以下のようにして導出される。
まず、二重点iが属する粒界uの粒界ベクトルγiの大きさ(絶対値)と同じ大きさを有し、且つ、二重点iから点i−1、i+1に向かう方向を有する2つのベクトルfi1、fi2のベクトル和が、二重点iに生じる駆動力Frであると仮定する(図6を参照)。そうすると、二重点iに生じる駆動力Frの大きさは、以下の(2)式で表される。
【0041】
【数2】
【0042】
ここで、lは、二重点iから点i−1(又は点i+1)までの直線42、43の長さ[m]である。また、αは、二重点i及び曲率中心Oを結ぶ直線と、点i−1(又は点i+1)及び曲率中心Oを結ぶ直線とのなす角度[°]である。
二重点iに生じる駆動力を(2)式のようにして定義してもよいが、このようにして定義してしまうと、二重点iに生じる駆動力が、二重点iから点i−1(又は点i+1)までの直線42、43の長さlに依存してしまう。すなわち、二重点iに生じる駆動力が、1つの粒界uに対して設定された二重点iの数に依存してしまう。例えば、図6(c)に示すように、粒界u1に対して3つの二重点i2〜i4が設定された場合と、粒界u1に対して5つの二重点が設定された場合とで、二重点iに生じる駆動力が異なってしまう。
【0043】
そこで、二重点iに生じる駆動力が、二重点iから点i−1(又は点i+1)までの直線42、43の長さlに依存しないように、(2)式の右辺を、その長さlで割った値を、二重点iに生じる駆動力Fi(t)の大きさとして定義した((1)式を参照)。
【0044】
以上のようにして(1)式を用いて、二重点iに生じる駆動力Fi(t)を求めるために、二重点用駆動力計算部114は、計算対象の二重点i、及びその二重点iに隣接する2つの点i−1、i+1の情報を、点設定部103から読み出す。次に、二重点用駆動力計算部114は、二重点iと、その二重点iに隣接する2つの点i−1、i+1とにより定まる円弧41の曲率中心O及び曲率半径Ri(t)を計算する。また、二重点用駆動力計算部114は、計算対象の二重点iに属する粒界uの単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。
【0045】
そして、二重点用駆動力計算部114は、曲率半径Ri(t)と、単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、二重点iに生じる駆動力Fi(t)の大きさを計算する。また、二重点用駆動力計算部114は、計算対象の二重点iから曲率中心Oに向かう方向を計算し、二重点iに生じる駆動力Fi(t)の方向を決定する。
【0046】
図3の説明に戻り、三重点用駆動力計算部115は、解析点判別部113により、計算対象の点iが解析対象領域の境界線上にない三重点であると判別された場合に、その三重点に生じる駆動力Fi(t)を計算する。図7は、解析対象領域の境界線上にない三重点に生じる駆動力Fi(t)の計算方法の一例を説明する図である。尚、図7では、三重点iに生じる駆動力Fi(t)を計算する場合を例に挙げて説明する。また、図7では、三重点iに隣接する3つの点を夫々「1」、「2」、「3」で表記している。
【0047】
まず、三重点用駆動力計算部115は、計算対象の三重点iと、その三重点iに隣接する3つの点1、2、3の情報を、点設定部103から読み出す。そして、三重点用駆動力計算部115は、計算対象の三重点iから、点1、2、3に向かう方向を有する単位ベクトルを計算する。また、三重点用駆動力計算部115は、点1、2、3が属する粒界uにおける単位長さ当たりの粒界エネルギーγi1、γi2、γi3の大きさ(絶対値)を、粒界エネルギー設定部109から取得する。
そして、三重点用駆動力計算部115は、単位長さ当たりの粒界エネルギーγi1、γi2、γi3の大きさ(絶対値)と、計算対象の三重点iから点1、2、3に向かう方向を有する単位ベクトル(dij(t)/|dij(t)|)とを、以下の(3)式に代入して、計算対象の三重点iに生じる駆動力Fi(t)を計算する。
【0048】
【数3】
【0049】
尚、(3)式において、jは、計算対象の三重点iに隣接する3つの点を識別するための変数である。
このように、本実施形態では、点1、2、3が属する粒界uにおける単位長さ当たりの粒界エネルギーγi1、γi2、γi3の大きさ(絶対値)と同じ大きさを有し、且つ、計算対象の三重点iから、その三重点iに隣接する点に向かう方向を有する3つのベクトルDi1(t)、Di2(t)、Di3(t)のベクトル和が、三重点iに生じる駆動力Fi(t)として計算される。
【0050】
図3の説明に戻り、境界点用駆動力計算部118は、解析点判別部113により、計算対象の点iが解析対象領域の境界線上にある境界点(単点、二重点、及び三重点)であると判別された場合に、その境界点に生じる駆動力Fi(t)を計算する。図8は、解析対象領域の境界線上にある点(境界点)に生じる駆動力Fi(t)の計算方法の一例を説明する図である。尚、図8(a)は、図4に示した領域33に対応する図であり、図8(b)は、領域34に対応する図であり、図8(c)は、領域35に対応する図であり、図8(d)は、領域36に対応する図である。
【0051】
図8において、本実施形態では、境界点用駆動力計算部118は、前述した二重点用駆動力計算部114と同様に、(1)式を用いて、境界点iに生じる駆動力Fi(t)を計算する。前述したように、(1)式では、曲率半径Ri(t)を使用する。そこで、境界点用駆動力計算部118は、境界点i21〜i24に隣接する点i25〜i34(図8では二重点)と解析対象領域の境界線に対して線対称となる仮想的な仮想点81〜88を設定する。そして、境界点用駆動力計算部118は、境界点i21〜i24と、その境界点i21〜i24に隣接する点25〜i34と、設定した仮想点81〜88とにより定まる円弧91〜98の曲率中心Oa〜Oh及び曲率半径Ri(t)を計算する。このようにして計算される曲率中心Oa〜Ohは、解析対象領域の境界線上に位置することになる。
次に、境界点用駆動力計算部118は、計算対象の境界点iに属する粒界uの単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。
次に、境界点用駆動力計算部118は、曲率半径Ri(t)と、単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点iに生じる駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点iから曲率中心Oに向かう方向を計算し、計算した方向に対応する解析対象領域の境界線上の方向を、境界点iに生じる駆動力Fi(t)の方向として決定する。前述したように、曲率中心Oa〜Ohは、解析対象領域の境界線上に位置するので、境界点iは、当該境界線上を移動することになる。
【0052】
より具体的に説明すると、境界点iが、単点の場合には、図8(a)の左図に示すように、境界点用駆動力計算部118は、境界点i21と、二重点i25と、仮想点81とにより定まる円弧91の曲率中心Oa及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i21に属する粒界u(結晶粒A16、A17の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点iに生じる駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i21から曲率中心Oaに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i21に生じる駆動力Fi(t)の方向として決定する。こうして、図8(a)の右図に示すように、境界点i21は、解析対象領域の境界線上に沿って移動し、新たな境界点i21'となる。
【0053】
境界点iが二重点の場合には、図8(b)の左図に示すように、境界点用駆動力計算部118は、境界点i22と、二重点i26と、仮想点82とにより定まる円弧92の曲率中心Ob及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i22に属する第1の粒界u(結晶粒A18、A19の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i22に生じる第1の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i22から曲率中心Obに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i22に生じる第1の駆動力Fi(t)の方向として決定する。
【0054】
更に、境界点用駆動力計算部118は、境界点i22と、二重点i27と、仮想点83とにより定まる円弧93の曲率中心Oc及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i22に属する第2の粒界u(結晶粒A19、A20の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i22に生じる第2の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i22から曲率中心Ocに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i22に生じる第2の駆動力Fi(t)の方向として決定する。
以上のようして、図8(b)の右図に示すように、二重点である境界点i22は、2つの境界点i22'、i22''に分裂する。
【0055】
境界点iが三重点の場合には、図8(c)の左図に示すように、境界点用駆動力計算部118は、境界点i23と、二重点i28と、仮想点84とにより定まる円弧94の曲率中心Od及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i23に属する第1の粒界u(結晶粒A21、A22の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i23に生じる第1の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i23から曲率中心Odに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i23に生じる第1の駆動力Fi(t)の方向として決定する。
【0056】
そして、境界点用駆動力計算部118は、境界点i23と、二重点i29と、仮想点85とにより定まる円弧95の曲率中心Oe及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i23に属する第2の粒界u(結晶粒A22、A23の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i23に生じる第2の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i23から曲率中心Oeに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i23に生じる第2の駆動力Fi(t)の方向として決定する。
【0057】
更に、境界点用駆動力計算部118は、境界点i23と、二重点i30と、仮想点86とにより定まる円弧96の曲率中心Of及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i23に属する第3の粒界u(結晶粒A23、A24の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i23に生じる第3の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i23から曲率中心Ofに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i23に生じる第3の駆動力Fi(t)の方向として決定する。
以上のようして、図8(c)の右図に示すように、三重点である境界点i23は、3つの境界点i23'、i23''、i23'''に分裂する。
【0058】
以上は、境界点iが、解析対象領域の四隅(角)にない場合における駆動力Fi(t)の計算方法の一例である。一方、境界点iが、解析対象領域の四隅(角)にある場合には、境界点iに隣接する点と解析対象領域の境界線に対して線対称となる仮想点が2つ存在する。そこで、本実施形態では、前記線対称となる仮想点の2つの夫々について、前述したようにして駆動力Fi(t)を求め、求めた駆動力Fi(t)のうち、大きい方の駆動力Fi(t)を採用するようにしている。ここで、図8(d)を参照しながら、解析対象領域の四隅にある境界点iが単点である場合を例に挙げて、解析対象領域の四隅にある境界点iに生じる駆動力Fi(t)の計算方法の一例を説明する。
【0059】
図8(d)の左図に示すように、解析対象領域の四隅にある境界点i24に隣接する点34と解析対象領域の境界線に対して線対称となる仮想点は2つある(点87、88)。そこで、まず、境界点用駆動力計算部118は、境界点i24と、二重点i34と、仮想点87とにより定まる円弧97の曲率中心Og及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i24に属する第1の粒界u(結晶粒A16、A25の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i24に生じる第1の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i24から曲率中心Ogに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i24に生じる第1の駆動力Fi(t)の方向として決定する。
【0060】
更に、境界点用駆動力計算部118は、境界点i24と、二重点i37と、仮想点88とにより定まる円弧98の曲率中心Oh及び曲率半径Ri(t)を計算する。次に、境界点用駆動力計算部118は、計算対象の境界点i24に属する第2の粒界u(結晶粒A16、A25の粒界)の単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。次に、境界点用駆動力計算部118は、計算した曲率半径Ri(t)と、取得した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点i24に生じる第2の駆動力Fi(t)の大きさを計算する。また、境界点用駆動力計算部118は、計算対象の境界点i24から曲率中心Ohに向かう方向を計算し、計算した方向(解析対象領域の境界線上の方向)を、境界点i24に生じる第2の駆動力Fi(t)の方向として決定する。
【0061】
そして、境界点用駆動力計算部118は、計算した第1の駆動力Fi(t)と第2の駆動力Fi(t)とのうち、大きさが大きい方の駆動力Fi(t)を採用する。図8(d)に示す例では、第1の駆動力Fi(t)の方が、第2の駆動力Fi(t)よりも大きさが大きいものとする。そうすると、図8(d)の右図に示すように、境界点i24は、解析対象領域の境界線上に沿って移動し、新たな境界点i24'となる。
本実施形態では、以上のようにすることによって、境界点iと、当該境界点iと隣接する点とを最短距離で相互に結ぶラインpの長さが、境界点iを移動する前よりも短くなるように、境界点iを移動させるようにしている。
【0062】
図3の説明に戻り、位置計算部116は、単点i、二重点i、及び三重点iの時間の経過に伴う位置の変化を計算する。
まず、境界点iと、境界点iでない二重点iの時間の経過に伴う位置の変化を計算する方法の一例を説明する。
位置計算部116は、二重点用駆動力計算部114により計算された駆動力Fi(t)を示すベクトル(計算対象の点iに生じる駆動力Fi(t)を示すベクトル)を取得する。また、位置計算部116は、計算対象の点iが属する粒界uの易動度Miを、易動度設定部111から取得する。
ここで、計算対象の点iが境界点である場合であって、二重点(三重点)である場合、位置計算部116は、計算対象の点iが属する粒界uの易動度Miを2つ(3つ)取得することになる。図8(b)に示す例では、結晶粒A18、A19の粒界uの易動度Mi1と、結晶粒A19、A20の粒界uの易動度Mi2とを取得する。また、図8(c)に示す例では、結晶粒A21、A22の粒界uの易動度Mi1と、結晶粒A22、A23の粒界uの易動度Mi2と、結晶粒A23、A24の粒界uの易動度Mi3とを取得する。
【0063】
そして、位置計算部116は、計算対象の点iが属する粒界uの易動度Miと、計算対象の点iの駆動力Fi(t)を示すベクトルとを、以下の(4)式に代入して、計算対象の点iの速度vi(t)を示すベクトルを計算する。
ここで、計算対象の点iが境界点である場合であって、二重点(三重点)である場合、位置計算部116は、計算対象の点iの速度vi(t)を示すベクトルを2つ(3つ)計算することになる。
【0064】
【数4】
【0065】
その後、位置計算部116は、点設定部103に設定されている「計算対象の点iの現在の位置ri(t)を示すベクトル」を取得する。そして、位置計算部116は、計算対象の点iの速度vi(t)を示すベクトルと、計算対象の点iの現在の位置ri(t)を示すベクトルと、時間Δtとを、以下の(5)式に代入して、現在の時間tからΔt[sec]が経過したときに、計算対象の点iが存在する位置ri(t+Δt)を示すベクトルを計算する。本実施形態では、このようにして、計算対象の点iの時間の経過に伴う位置の変化が計算される。
ここで、計算対象の点iが境界点である場合であって、二重点(三重点)である場合、位置計算部116は、現在の時間tからΔt[sec]が経過したときに、計算対象の点iが存在する位置ri(t+Δt)を示すベクトルを2つ(3つ)計算することになる。
尚、時間Δtは、点iの位置を計算するタイミング(間隔)を規定するものであり、解析対象となる電磁鋼鈑の種類や、解析条件、解析精度等に応じて予め定められている。
【0066】
【数5】
【0067】
そして、位置計算部116は、計算対象の点iが存在する位置ri(t+Δt)を示すベクトルを、点設定部103に出力する。このようにすることによって、前述したように、計算対象の点iの現在の位置ri(t)を示すベクトルが、点設定部103で設定される。
【0068】
次に、境界点でない三重点iの時間の経過に伴う位置の変化を計算する方法の一例を説明する。
位置計算部116は、位置計算部116は、計算対象の三重点iが属する3つの粒界uの易動度Mi1〜Mi3を、易動度設定部111から取得する。
【0069】
そして、位置計算部116は、計算対象の三重点iが属する3つの粒界uの易動度Mi1〜Mi3を用いて、計算対象の三重点iの易動度Miを計算する。具体的に、位置計算部116は、計算対象の三重点iから点1、2、3に向かう方向を有する単位ベクトル(dij(t)/|dij(t)|)と、計算対象の三重点iが属する3つの粒界uの易動度Mi1〜Mi3とを、以下の(6)式に代入して、計算対象の三重点iの易動度Miを計算する。
【0070】
【数6】
【0071】
尚、(6)式において、jは、計算対象の三重点iに隣接する3つの点を識別するための変数である。
また、位置計算部116は、三重点用駆動力計算部115により計算された駆動力Fi(t)を示すベクトル(計算対象の三重点iに生じる駆動力Fi(t)を示すベクトル)を取得する。そして、位置計算部116は、計算対象の三重点iが属する粒界uの易動度Miと、計算対象の三重点iの駆動力Fi(t)を示すベクトルとを、前述した(4)式に代入して、計算対象の三重点iの速度vi(t)を示すベクトルを計算する。
【0072】
その後、位置計算部116は、点設定部103に設定されている「計算対象の三重点iの現在の位置ri(t)を示すベクトル」を取得する。そして、位置計算部116は、計算対象の三重点iの速度vi(t)を示すベクトルと、計算対象の三重点iの現在の位置ri(t)を示すベクトルと、時間Δtとを、前述した(5)式に代入して、現在の時間tからΔt[sec]が経過したときに、計算対象の三重点iが存在する位置ri(t+Δt)を示すベクトルを計算する。本実施形態では、このようにして、計算対象の三重点iの時間の経過に伴う位置の変化が計算される。尚、前述したように、時間Δtは、点iの位置を計算するタイミング(間隔)を規定するものであり、解析対象となる電磁鋼鈑の種類や、解析条件、解析精度等に応じて予め定められている。
【0073】
そして、位置計算部116は、計算対象の三重点iが存在する位置ri(t+Δt)を示すベクトルを、点設定部103に出力する。このようにすることによって、前述したように、計算対象の三重点iの現在の位置ri(t)を示すベクトルが、点設定部103で設定される。
【0074】
解析時間設定部112は、位置計算部116において、解析完了時間Tが経過したとき、又は解析完了時間Tが経過した後の位置ri(t+Δt)が、位置計算部116に計算されたか否かを判定することによって、解析完了時間Tまで解析が終了したか否かを判定する。
【0075】
解析画像表示部117は、解析時間判別部112により、解析完了時間Tまで解析が終了したと判定されると、位置計算部116により計算された「点iの位置ri(t+Δt)のベクトル」に基づいて、時間tが0(ゼロ)からT[sec]までの間に、結晶粒Aの状態がどのように推移するのかを示す画像を、表示装置200に表示させる。
【0076】
次に、図9のフローチャートを参照しながら、結晶粒解析装置110が行う処理動作の一例を説明する。尚、ユーザによる操作装置300の操作に基づいて、CPUが、ROMやハードディスクから制御プログラムを読み出して実行を開始することにより、図9に示すフローチャートの処理が開始される。
【0077】
まず、図9−1のステップS1において、結晶画像取得部101は、電磁鋼鈑の結晶粒Aの画像信号と、その画像信号に含まれる各結晶粒Aの方位ξを示す信号とが入力されるまで待機する。電磁鋼鈑の結晶粒Aの画像信号(結晶粒画像信号)と、その画像信号に含まれる各結晶粒Aの方位ξを示す信号とが入力されると、ステップS2に進む。
このように本実施形態では、例えば、ステップS1の処理を行うことにより、画像信号取得手段の一例が実現される。
【0078】
ステップS2に進むと、結晶画像表示部102は、ステップS1で取得された結晶粒画像信号に基づく結晶粒画像31を、表示装置200に表示させる。このとき、結晶画像表示部102は、解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)と、解析完了時間Tとの入力をユーザに促すための画像も表示装置200に表示させる。そして、ここでは、解析温度θ(t)と、解析完了時間Tとが順次入力された後に、結晶粒画像31を参照しながらユーザが点i(単点、二重点、又は三重点)を指定できるようにする場合を例に挙げて説明する。
【0079】
次に、ステップS3において、解析温度設定部106は、ユーザによる操作装置300の操作に基づいて、解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)が入力されるまで待機する。そして、解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)が入力されると、ステップS4に進む。ステップS4に進むと、解析温度設定部106は、入力された解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)を、RAM又はハードディスクに設定する。尚、図9のフローチャートでは、解析対象の電磁鋼鈑(結晶粒A)の解析温度θ(t)が、一定値である場合を例に挙げて説明する。
【0080】
次に、ステップS5において、解析時間設定部112は、ユーザによる操作装置300の操作に基づいて、解析完了時間Tが入力されるまで待機する。そして、解析完了時間Tが入力されると、ステップS6に進む。ステップS6に進むと、解析時間設定部112は、入力された解析完了時間Tを、RAM又はハードディスクに設定する。
次に、ステップS7において、点設定部103は、結晶画像表示部102により表示された結晶粒画像に対して、点i(単点、二重点、又は三重点)が指定されるまで待機する。前述したように、本実施形態では、解析対象領域の境界線上では、単点、二重点、及び三重点の何れもが指定可能であるが、解析対象領域の境界線以外では、二重点及び三重点の何れかが指定可能となっている。
【0081】
以上のようにして、点i(単点、二重点、又は三重点)が指定されると、ステップS8に進む。ステップS8に進むと、点設定部103は、ステップS7で指定されたと判定した点iの位置ri(t)を示すベクトルを計算して、RAM又はハードディスクに設定する。
このように本実施形態では、例えば、ステップS8の処理を行うことにより、点設定手段の一例が実現される。
次に、ステップS9において、点設定部103は、ユーザによる操作装置300の操作に基づいて、点(単点、二重点、又は三重点)iを指定する作業の終了指示がなされたか否かを判定する。この判定の結果、点iを指定する作業の終了指示がなされていない場合には、ステップS7に戻り、既に指定された点(単点、二重点、又は三重点)iと別の点(単点、二重点又は三重点)iが指定されるまで待機する。
一方、点iを指定する作業の終了指示がなされた場合には、ステップS10に進む。ステップS10に進むと、点設定部103は、ステップS7で指定されたと判定した点(単点、二重点、又は三重点)iの数(すなわち、ステップS7の処理を行った回数)NIを計算して、RAM又はハードディスクに設定する。
【0082】
次に、ステップS11において、ライン設定部104は、ステップS8で設定された点(単点、二重点、又は三重点)iのうち、同一の粒界u上で互いに隣接する2つの点iにより特定されるラインpを、RAM又はハードディスクに設定する。すなわち、ライン設定部104は、ラインpを、そのラインpを特定する2つの点iにより定義する。例えば、図4(c)に示したラインp1は、以下の(6)式のように定義される。
p1={i1,i2} ・・・(6)
【0083】
次に、ステップS12において、粒界設定部105は、ステップS11で設定されたラインpのうち、ステップS8により設定された三重点iを両端として互いに接続されたラインpにより特定される粒界uを、RAM又はハードディスクに設定する。更に、粒界設定部105は、ステップS8により設定された三重点iを一端とし、同様にステップS8により設定された境界点iを他端として互いに接続されたラインpにより特定される粒界uも、RAM又はハードディスクに設定する。すなわち、粒界設定部105は、粒界uを、その粒界uを特定する複数のラインpにより定義する。例えば、図4(c)に示した粒界u1は、以下の(7)式のように定義される。
u1={p1,p2,p3,p4} ・・・(7)
【0084】
次に、ステップS13において、方位設定部107は、ステップS1で入力されたと判定された「結晶粒画像31に含まれる各結晶粒Aの方位ξを示す信号」に基づいて、結晶粒画像31に含まれる全ての結晶粒Aの方位ξを、RAM又はハードディスクに設定する。
次に、ステップS14において、粒界エネルギー設定部109は、ステップS14で設定された結晶粒Aの方位ξと、ステップS4で設定された解析温度θ(t)とに基づいて、粒界エネルギー記憶部108に記憶されたグラフ等から、ステップS12で設定された全ての粒界uの単位長さ当たりの粒界エネルギーγを読み出す。そして、粒界エネルギー設定部109は、読み出した単位長さ当たりの粒界エネルギーγを、RAM又はハードディスクに設定する。
【0085】
次に、ステップS15において、易動度設定部111は、ステップS14で設定された結晶粒Aの方位ξと、ステップS4で設定された解析温度θ(t)とに基づいて、易動度記憶部110に記憶されたグラフ等から、ステップS12で設定された全ての粒界uの易動度Miを読み出す。そして、易動度設定部111は、読み出した易動度Miを、RAM又はハードディスクに設定する。
【0086】
次に、図9−2のステップS16において、点設定部103は、境界点iを分離することにより増える境界点iの数NJに「0(ゼロ)」を設定する。
次に、ステップS17において、点設定部103は、計算対象の点を示す変数iに「1」を設定する。
次に、ステップS18において、解析点判別部113は、計算対象の点を示す変数iにより特定される点(計算対象の点)が、境界点であるか否かを判定する。この判定の結果、計算対象の点が境界点である場合には、後述するステップS22に進む。
【0087】
一方、計算対象の点が境界点でない場合には、ステップS19に進む。ステップS19に進むと、解析点判別部113は、計算対象の点を示す変数iが、計算対象の点の総数NIより小さいか否かを判定する。この判定の結果、計算対象の点を示す変数iが、計算対象の点の総数NIより小さい場合には、現在設定されている全ての点iについて境界点か否かを判定していないと判断し、ステップS20に進む。
【0088】
ステップS20に進むと、点設定部103は、計算対象の点を示す変数iに「1」を加算して、計算対象の点を変更する。そして、変更した点に対して、ステップS18以降の処理を再度行う。
一方、ステップS19において、計算対象の点を示す変数iが、計算対象の点の総数NI以上であると判定された場合には、現在設定されている全ての点iについて境界点か否かを判定したと判断し、ステップS21に進む。ステップS21に進むと、点設定部103は、計算対象の点の総数NIに、境界点iを分離することにより増える境界点iの数NJを加算して、計算対象の点の総数NIを更新する。そして、後述する図9−3のステップS26に進む。
【0089】
ステップS18において、計算対象の点が境界点であると判定された場合には、ステップS22に進む。ステップS22に進むと、解析点判別部113は、計算対象の境界点が、単点か否かを判定する。この判定の結果、計算対象の境界点が、単点である場合には、前述したステップS19に進み、計算対象の点を示す変数iが、計算対象の点の総数NIより小さいか否かを判定する。
【0090】
一方、計算対象の境界点が、単点でない場合には、ステップS23に進む。ステップS23に進むと、解析点判別部113は、計算対象の境界点iが、二重点か否かを判定する。この判定の結果、計算対象の境界点iが、二重点である場合には、ステップS24に進む。ステップS24に進むと、点設定部103は、境界点iを分離することにより増える境界点iの数NJに「1」を加算する。そして、前述したステップS19に進み、計算対象の点を示す変数iが、計算対象の点の総数NIより小さいか否かを判定する。
【0091】
一方、ステップS23の判定の結果、計算対象の境界点が、二重点ではなく三重点である場合には、ステップS25に進む。ステップS25に進むと、点設定部103は、境界点iを分離することにより増える境界点iの数NJに「2」を加算する。そして、前述したステップS19に進み、計算対象の点を示す変数iが、計算対象の点の総数NIより小さいか否かを判定する。
【0092】
以上のようにして、境界点の分離を考慮した計算対象の点の総数NIが決定すると、図9−3のステップS26に進む。ステップS26に進むと、解析時間設定部112は、時間tを「0(ゼロ)」に設定する。
次に、ステップS27において、解析点判別部113は、計算対象の点を示す変数iを「1」に設定する。これにより計算対象の点iが設定される。
【0093】
次に、ステップS28において、解析点判別部113は、計算対象の点が、境界点か否かを判定する。この判定の結果、計算対象の点が、境界点である場合には、後述する図9−4のステップS46に進む。
一方、計算対象の点が、境界点でない場合には、ステップS29に進む。ステップS29に進むと、解析点判別部113は、計算対象の点iが、二重点か否かを判定する。この判定の結果、計算対象の点が、二重点でなく、三重点である場合には、後述するステップS42に進む。一方、計算対象の点が、二重点である場合には、ステップS30に進む。
ステップS30に進むと、二重点用駆動力計算部114は、計算対象の二重点i、及びその二重点に隣接する2つの点i−1、i+1の情報を、点設定部103から読み出す。そして、二重点用駆動力計算部114は、二重点iと、その二重点iに隣接する2つの点i−1、i+1とにより定まる円弧41の曲率中心O及び曲率半径Ri(t)を計算する。
【0094】
次に、ステップS31において、二重点用駆動力計算部114は、計算対象の点が属する粒界uの単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から読み出す。
次に、ステップS32において、二重点用駆動力計算部114は、ステップS30で計算した曲率半径Ri(t)と、ステップS31で読み出した単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、二重点iに生じる駆動力Fi(t)の大きさを計算する。
【0095】
また、二重点用駆動力計算部114は、計算対象の二重点iの現在の位置ri(t)を示すベクトルを点設定部103から読み出す。そして、二重点用駆動力計算部114は、計算対象の二重点iの現在の位置ri(t)を示すベクトルと、ステップS30で計算した曲率中心Oとから、計算対象の二重点iから曲率中心Oに向かう方向を計算し、二重点iに生じる駆動力Fi(t)の方向を決定する。これにより、二重点iに生じる駆動力Fi(t)を示すベクトルが得られる。
【0096】
次に、ステップS33において、位置計算部116は、計算対象の点(二重点)が属する粒界uに対応する易動度Miを、易動度設定部111から読み出す。
次に、ステップS34において、位置計算部116は、計算対象の点の現在の位置ri(t)を示すベクトルを点設定部103から受け取る。
【0097】
次に、ステップS35において、位置計算部116は、ステップS32(又は後述するステップS43、S49)で得られた「計算対象の点に生じる駆動力Fi(t)を示すベクトル」と、ステップS33(又は後述するステップS44、S50)で読み出された「計算対象の点が属する粒界uの易動度Mi」とを、(4)式に代入して、計算対象の点iの速度vi(t)を示すベクトルを計算する。
そして、位置計算部116は、計算対象の点iの速度vi(t)を示すベクトルと、計算対象の点の現在の位置ri(t)を示すベクトルと、時間Δtとを、(5)式に代入して、現在の時間tからΔt[sec]が経過したときに、計算対象の点iが存在する位置ri(t+Δt)を示すベクトルを計算する。
【0098】
次に、ステップS36において、解析点判別部113は、計算対象の点を示す変数iが、計算対象の点の総数NIより小さいか否かを判定する。この判定の結果、計算対象の点を示す変数iが、計算対象の点の総数NIより小さい場合には、時間t+Δtにおける位置を、現在設定されている全ての点iについて計算していないと判定し、ステップS37に進む。
【0099】
ステップS37に進むと、解析点判別部113は、計算対象の点を示す変数iに「1」を加算して、計算対象の点を変更する。そして、変更した点に対して、ステップS28以降の処理を再度行う。
一方、ステップS36において、計算対象の点を示す変数iが、計算対象の点の総数NI以上であると判定された場合には、時間t+Δtにおける位置を、点設定部103で現在設定されている全ての点iについて計算したと判定し、ステップS38に進む。
【0100】
ステップS38に進むと、位置計算部116は、計算対象の点iが存在する位置ri(t+Δt)を示すベクトルを、点設定部103に出力する。これにより、計算対象の点の現在の位置ri(t)を示すベクトルが、点設定部103で設定(又は更新)される。
次に、ステップS39において、解析時間設定部112は、時間tが、ステップS6で設定した解析完了時間Tよりも大きいか否かを判定する。すなわち、解析完了時間Tが経過したか否かを判定する。この判定の結果、時間tが、ステップS6で設定した解析完了時間Tより大きくない場合(解析完了時間Tが経過していない場合)には、ステップ40に進む。ステップS40に進むと、解析時間設定部112は、現在設定している時間tに時間Δtを加算して、時間tを更新する。そして、ステップS27以降の処理を再度行い、更新した時間tから時間Δtが経過した場合の点iの位置ri(t+Δt)を計算する。
【0101】
一方、ステップS39において、時間tが、ステップS6で設定した解析完了時間Tよりも大きいと判定され場合(解析完了時間Tが経過した場合)には、ステップS41に進む。ステップS41に進むと、解析画像表示部117は、ステップS35で計算された「点iの位置ri(t+Δt)のベクトル」に基づいて、時間tが0(ゼロ)からT[sec]までの間に、結晶粒Aの状態がどのように推移するのかを示す画像を、表示装置200に表示させる。そして、図9のフローチャートを終了する。
【0102】
ステップS29において、計算対象の点が、二重点ではなく、三重点であると判定された場合には、ステップS42に進む。ステップS42に進むと、三重点用駆動力計算部115は、点1、2、3が属する粒界uにおける単位長さ当たりの粒界エネルギーγi1、γi2、γi3の大きさ(絶対値)を、粒界エネルギー設定部109から読み出す。
また、三重点用駆動力計算部115は、計算対象の三重点iと、その三重点iに隣接する3つの点1、2、3の情報を、点設定部103から読み出す。そして、三重点用駆動力計算部115は、計算対象の三重点iから、点1、2、3に向かう方向を有する単位ベクトルを計算する。
【0103】
次に、ステップS43において、三重点用駆動力計算部115は、ステップS42で読み出した「単位長さ当たりの粒界エネルギーγi1、γi2、γi3の大きさ」と、ステップS42で計算した「計算対象の三重点iから、点1、2、3に向かう方向を有する単位ベクトル」とを(3)式に代入して、計算対象の三重点iに生じる駆動力Fi(t)を計算する。
【0104】
次に、ステップS44において、計算対象の点(三重点)が属する3つの粒界uに対応する易動度Mi1〜Mi3を、易動度設定部111から読み出す。
次に、ステップS45において、位置計算部116は、計算対象の三重点が属する3つの粒界uの易動度Mi1〜Mi3と、計算対象の三重点から点1、2、3に向かう方向を有する単位ベクトル(dij(t)/|dij(t)|)とを、(6)式に代入して、計算対象の三重点iの易動度Miを計算する。尚、計算対象の三重点iから点1、2、3に向かう方向を有する単位ベクトルは、ステップS42で計算されたものを使用することができる。そして、前述したステップS34以降の処理を行い、時間t+Δtにおける三重点iの位置ri(t+Δt)のベクトルを前述したようにして計算する。
【0105】
また、ステップS28において、計算対象の点が、境界点であると判定された場合には、図9−4のステップS46に進む。
ステップS46に進むと、境界点用駆動力計算部118は、境界点i21〜i24に隣接する点i25〜i34(図8では二重点)と解析対象領域の境界線に対して線対称となる仮想点81〜88を設定する。
次に、ステップS47において、境界点用駆動力計算部118は、境界点i21〜i24と、その境界点i21〜i24に隣接する点25〜i34と、設定した仮想点81〜88とにより定まる円弧91〜98の曲率中心Oa〜Oh及び曲率半径Ri(t)を計算する。
【0106】
次に、ステップS48において、計算対象の境界点iに属する粒界uの単位長さ当たりの粒界エネルギーγiを、粒界エネルギー設定部109から取得する。前述したように、境界点iが単点である場合には、その境界点iが属する1つの粒界uの単位長さ当たりの粒界エネルギーγiを取得する。また、境界点iが二重点又は三重点である場合には、ステップS24又はステップS25で分離することになった各境界点iが属する1つの粒界uの単位長さ当たりの粒界エネルギーγiを取得する。
【0107】
次に、ステップS49において、境界点用駆動力計算部118は、ステップS47で計算された曲率半径Ri(t)と、ステップS48で読み出された単位長さ当たりの粒界エネルギーγiとを(1)式に代入して、境界点iに生じる駆動力Fi(t)の大きさを計算する。そして、境界点用駆動力計算部118は、計算対象の境界点iから曲率中心Oに向かう方向を計算し、計算した方向を、境界点iに生じる駆動力Fi(t)の方向として決定する。
【0108】
前述したように、解析対象領域の四隅にない境界点i(単点である境界点i、又は分離される各境界点i)については、境界点iに生じる駆動力Fi(t)が1つ算出される。
一方、解析対象領域の四隅にある境界点iについては、解析対象領域の境界線に対して線対称となる仮想点が2つできるので、線対称となる仮想点の2つの夫々について求めた2つの駆動力Fi(t)のうち、大きい方の駆動力Fi(t)を採用する(図8(d)を参照)。
【0109】
次に、ステップS50において、位置計算部116は、計算対象の境界点iが属する粒界uに対応する易動度Miを、易動度設定部111から読み出す。前述したように、計算対象の点iが境界点である場合であって、元々二重点(三重点)である場合、位置計算部116は、計算対象の分離される各境界点iが属する粒界uの易動度Miを1つ取得することになる。
そして、前述した図9−3のステップS34に進み、位置計算部116は、計算対象の境界点の現在の位置をri(t)示すベクトルを取得する。
以上のように本実施形態では、例えば、ステップS46〜50、S34、S35の処理を行うことにより、境界点位置変更の一例が実現される。そして、例えば、ステップS46の処理を行うことにより、仮想点設定手段の一例が実現され、例えば、ステップS49の処理を行うことにより、駆動力演算手段の一例が実現され、例えば、ステップS34、S35の処理を行うことにより、位置演算手段の一例が実現される。
【0110】
尚、ステップS3で入力される解析温度θ(t)が時間に依存する場合、例えば、ステップS39の後に、ステップS40で設定された時間t+Δtにおける解析温度θ(t+Δt)を読み出し、その解析温度θ(t+Δt)における単位長さ当たりの粒界エネルギーγと易動度Miとを再設定してから、ステップS27以降の処理を行うようにすればよい。
【0111】
次に、以上のような処理を行う結晶粒解析装置100の実施例を説明する。尚、ここでは、チタン(Ti)の目標含有量が0.04[%]の深絞り鋼を製造する場合を例に挙げて説明する。
まず、結晶粒解析装置100による解析結果を適用せずに、(比較対象となる)深絞り鋼を製造した。具体的には、まず、転炉溶製されたスラブを、熱延巻き取り温度が600[℃]となるように熱間圧延した。尚、熱延巻き取り温度のバラツキは、標準偏差で30[℃]であった。そして、このようにして熱間圧延された薄板鋼板を酸洗した後に冷間圧延し、その冷間圧延により圧延された薄板鋼板を、CAPL(Continuous Annealing and Processing Line、連続焼鈍ライン)で850[℃]、5分間焼鈍して、比較対象となる製品を製造した。このようにして製造された製品のうち、r(ランクフォード)値が2.0よりも大きいものを良品、そうでないものを不良品とした。そうすると、歩留まりが97.5[%]以上になった。
【0112】
次に、結晶粒解析装置100による解析を行った。解析を行うためのサンプルを得るために、まず、熱間圧延した後に、前述したように酸洗・冷間圧延した(焼鈍前の)薄板鋼板(1つのコイル)の一部を採取する。採取箇所は、相対的に熱延巻き取り温度が高い部分と、相対的に熱延巻き取り温度が中程度の部分と、相対的に熱延巻き取り温度が低い部分である。そして、それら採取した薄板鋼板を、700[℃]、10秒間焼鈍して3種類のサンプルを得た。図10に、熱延巻き取り温度と、サンプルの数との関係の一例を示す。図10では、熱延巻き取り温度が相対的に低いサンプルがAで示す領域に属し、熱延巻き取り温度が相対的に中程度のサンプルがBで示す領域に属し、熱延巻き取り温度が相対的に高いサンプルがCで示す領域に属していることを表している。尚、以下の説明では、熱延巻き取り温度が相対的に高いサンプル、熱延巻き取り温度が相対的に中程度のサンプル、熱延巻き取り温度が相対的に低いサンプルを、必要に応じて高温サンプル、中温サンプル、低温サンプルと称する。
【0113】
以上のようにして得られた高温サンプル、中温サンプル、低温サンプルを、EBSP法で解析して、サンプルの結晶粒Aの画像信号と、その画像信号に含まれる各結晶粒Aの方位ξを示す信号とを、結晶粒解析装置100に入力した。
次に、焼鈍温度と焼鈍時間とにより定められる焼鈍条件に基づいて、中温サンプルの解析温度θ(t)を結晶粒解析装置100に入力した。そして、中温サンプルを、入力した焼鈍条件で焼鈍した場合に、中温サンプルの結晶粒Aの状態がどのように変化するのかを、前述したようにして結晶粒解析装置100で解析した。そして、解析した結果に基づいて、中温サンプルに対するr値を、別途用意したプログラムを実行することにより計算した。この計算したr値が2.0より大きくなるように、焼鈍条件(すなわち、解析温度θ(t))を変えて、結晶粒解析装置100による解析を繰り返し行った。その結果、計算したr値が2.0より大きくなる「中温サンプルの焼鈍条件」は、図11(a)に示すようになった。
【0114】
そして、中温サンプルに対する解析結果と略同じ解析結果が得られるように、焼鈍条件(すなわち、解析温度θ(t))を変えて、低温サンプル及び高温サンプルに対する解析を繰り返し行い、中温サンプルに対する解析結果と略同じ解析結果が得られる焼鈍条件を決定した。その結果、低温サンプルに対する焼鈍条件は、図11(b)に示すようになり、高温サンプルに対する焼鈍条件は、図11(c)に示すようになった。
【0115】
そして、前述したように酸洗・冷間圧延した(焼鈍前の)薄板鋼板のうち、相対的に熱延巻き取り温度が高い部分の焼鈍条件を、図11(c)に示す焼鈍条件とし、相対的に熱延巻き取り温度が中程度部分の焼鈍条件を、図11(a)に示す焼鈍条件とし、相対的に熱延巻き取り温度が低い部分の焼鈍条件を、図11(b)に示す焼鈍条件として製品を製造した。そして、比較対象の製品と同様に、r(ランクフォード)値が2.0よりも大きいものを良品、そうでないものを不良品とした。その結果、歩留まりが99[%]以上になった。
従って、結晶粒解析装置100による解析を行った結果に基づいて、1つのコイルに対する焼鈍条件を変えることにより、製品の歩留まりが向上することが確認できた。
【0116】
以上のように本実施形態では、結晶粒Aの粒界uの両端点に対応する三重点iに生じる駆動力Fi(t)と、結晶粒Aの中間点に対応する二重点iに生じる駆動力Fi(t)と、解析対象領域の境界線上の境界点iに生じる駆動力Fi(t)を計算し、計算した駆動力Fi(t)に基づいて、各点iの位置がどのように移動するかを計算することによって、結晶粒Aがどのように変化するのかを解析するようにした。したがって、結晶粒A(粒界u)の形状を、解析対象領域の境界線における部分を含め、出来るだけ正確に再現できるモデルを容易に構築することができる。よって、結晶粒が時間の経過と共にどのように変化するのかを、従来よりも容易に且つ正確に解析することが可能になる。
【0117】
また、本実施形態では、二重点iの駆動力Fi(t)の大きさを(1)式に従って計算するようにした。すなわち、二重点iの駆動力Fi(t)の大きさを、その二重点iと、その二重点iに隣接する2つの点i+1、i−1とにより定まる円弧41の曲率(曲率半径Ri(t)の逆数)と、その二重点iが属する粒界uの単位長さ当たりの粒界エネルギーの大きさ(絶対値)γiとの積に基づいて決定するようにした。そして、二重点iの駆動力Fi(t)の方向を、その二重点iから、円弧41の曲率中心Oに向かう方向とした。
【0118】
また、本実施形態では、三重点iの駆動力Fi(t)を(3)式に従って計算するようにした。すなわち、三重点iに隣接する点が属する粒界の粒界エネルギーと同じ大きさを持ち、且つその三重点iから、その三重点iに隣接する点に向かう方向を持つベクトルを、その三重点iに隣接する3つの点の夫々について計算し、計算した3つのベクトルのベクトル和を、三重点iの駆動力Fi(t)として決定した。
【0119】
また、本実施形態では、境界点iの駆動力Fi(t)の大きさを二重点iと同様に、(1)式に従って計算するようにした。すなわち、境界点i21〜i24と隣接する点i25〜i34と、解析対象領域に対して線対称となる仮想点81〜88を設定し、これら境界点i21〜i24と、点i25〜i34と、仮想点81〜88とにより定まる円弧91〜98の曲率(曲率半径Ri(t)の逆数)と、その境界点iが属する粒界uの単位長さ当たりの粒界エネルギーの大きさ(絶対値)γiとの積に基づいて、境界点iの駆動力Fi(t)の大きさを決定する。そして、境界点iの駆動力Fi(t)の方向を、その境界点iから、円弧91〜98の曲率中心Oa〜Ohに向かう方向(すなわち、境界線上の方向)に対応する方向とした。更に、境界点iが二重点(三重点)である場合には、それらを分離した各境界点iが属する1つの粒界uの単位長さ当たりの粒界エネルギーを用いて夫々1つずつ駆動力Fi(t)を計算し、計算した駆動力Fi(t)に基づいて、境界点iを2つ(3つ)の単点に分離するようにした。
【0120】
したがって、境界点iを含む各点iが時間の経過と共に移動する様子を、大きな計算負荷をかけることなく、出来るだけ正確に解析することができる。そして、境界点iについては、周期的境界条件といった、実際とは異なる制限を受けた近似を行うことなく、移動する様子を解析することができる。よって、所望の電磁鋼鈑を、結晶粒解析装置100により解析した結果を、その電磁鋼鈑を製造するための操業条件に反映させることにより、操業時間の短縮や、製品の歩留まりの向上等を実現することができ、製品の納期短縮や、製品のコスト削減等を実現することができる。
【0121】
尚、本実施形態では、ユーザが、結晶粒画像31を見ながら、操作装置300を使用して、点iを指定する場合を例に挙げて説明したが、必ずしもこのようにする必要はない。例えば、EBSP法で解析することにより得られた結晶粒画像信号に基づいて、結晶粒解析装置100(コンピュータ)が自動的に、点iを指定するようにしてもよい。この場合、粒界uの長さに応じて二重点iの数を異ならせたり、粒界uの曲率に応じて二重点iの数を異ならせたり(例えば、直線的な部分よりも凸凹している部分に多くの二重点iを指定したり)することができる。また、境界点iについても、解析対象領域の境界線と粒界とが交わっている点に基づいて、結晶粒解析装置100(コンピュータ)が自動的に指定することができる。
【0122】
また、本実施形態では、粒界設定部105により、粒界uを定義するようにしたが、点i、ラインp、及び結晶粒Aを用いれば、粒界uは自ずと定まるので、必ずしも粒界uを定義する必要はない。
また、本実施形態では、粒界エネルギー設定部109、易動度設定部111は、粒界uを介して互いに隣接する2つの結晶粒Aの方位ξの差分Δξの絶対値に基づいて、単位長さ当たりの粒界エネルギーγ、易動度Miを設定するようにしたが、粒界uを介して互いに隣接する2つの結晶粒Aの方位ξの差分Δξそのものに基づいて、単位長さ当たりの粒界エネルギーγ、易動度Miを設定するようにしてもよい。
また、図9−3のフローチャートにおいて、ステップS40で時間を更新しているので、計算負荷を軽減するために、ステップ38の処理を行わないようにしてもよい。
【0123】
また、本実施形態では、(6)式を用いて、計算対象の三重点iにおける易動度Miを求めるようにしたが、計算対象の三重点iが属する3つの粒界uに対応する易動度Mi1〜Mi3を用いて、計算対象の三重点iの易動度Miを求めるようにしていれば、必ずしもこのようにする必要はない。例えば、以下の(8)式を用いて、計算対象の三重点iにおける易動度Miを求めるようにしてもよい。
【0124】
【数7】
【0125】
また、境界点iに生じる駆動力Fi(t)を算出する方法は、前述した方法に限定されるものではない。例えば、図12に示すようにして駆動力Fi(t)を算出することができる。図12は、解析対象領域の境界線上にある境界点に生じる駆動力Fi(t)の計算方法の他の例を説明する図である。尚、図12(a)は、図4に示した領域33に対応する図であり、図12(b)は、領域34に対応する図であり、図12(c)は、領域35に対応する図であり、図12(d)は、領域36に対応する図である。
【0126】
図12(a)に示すように、境界点iが単点である場合には、以下の(9)式により、境界点iに生じる駆動力Fij(t)を求めることができる。また、図12(b)に示すように、境界点iが二重点である場合には、以下の(10)式、(11)式により、境界点iに生じる駆動力Fik(t)、Fil(t)を求めることができる。また、図12(c)に示すように、境界点iが三重点である場合には、以下の(12)式〜(14)式により、境界点iに生じる駆動力Fim(t)、Fin(t)、Fio(t)を求めることができる。更に、境界点iが、解析対象領域の四隅にある単点である場合には、以下の(15)式により、境界点iに生じる駆動力Fi(t)を求めることができる。
【0127】
ここで、γiは、単位長さ当たりの粒界ベクトルである。例えば、図12(a)に示す例では、γijは、結晶粒A16、A17の粒界uにおける単位長さ当たりの粒界ベクトルであり、その方向は、点i21から点i25に向かう方向である。また、τは、解析対象領域の境界線に平行な単位ベクトルである。(15)式のτ1は、解析対象領域の垂直方向の境界線に平行な単位ベクトルであり、τ2は、解析対象領域の水平方向の境界線に平行な単位ベクトルである。また、ηは、解析対象領域の境界線における摩擦力に相当する力であり、予め設定されるものである。
【0128】
【数8】
【0129】
また、本実施形態では、境界点iが単点、二重点、及び三重点の場合を例に挙げて示したが、境界点iがm重点(mは4以上の整数)である場合でも、二重点及び三重点のときと同様にして、時間の経過に伴う位置の変更を行うことができる。この場合、境界点iの数はm個に分裂するので、このような境界点iを移動させる場合には、計算対象の点の総数NIを(m−1)個増やして処理を行うことになる。
【0130】
また、前述した実施例では、結晶粒解析装置100が解析する材料の一例である電磁鋼鈑として、薄板鋼板を例に挙げて説明したが、結晶粒解析装置100が解析する材料は、このようなものに限定されない。例えば、形状は、薄板に限定されず、厚板、線材等であってもよい。また、電磁鋼板の他に、ステンレス、チタン、アルミニウム等、全ての金属材料を適用することができる。尚、結晶粒解析装置100が解析する材料が異なる場合には、粒界エネルギー記憶部108や易動度記憶部110に記憶されるグラフ等の内容等、結晶粒解析装置100に入力されるデータが、材料に応じて異なることになる。
【0131】
以上説明した本発明の実施形態のうち、CPUが実行する部分は、コンピュータがプログラムを実行することによって実現することができる。また、プログラムをコンピュータに供給するための手段、例えばかかるプログラムを記録したCD−ROM等のコンピュータ読み取り可能な記録媒体、又はかかるプログラムを伝送する伝送媒体も本発明の実施形態として適用することができる。また、上記プログラムを記録したコンピュータ読み取り可能な記録媒体などのプログラムプロダクトも本発明の実施の形態として適用することができる。上記のプログラム、コンピュータ読み取り可能な記録媒体、伝送媒体及びプログラムプロダクトは、本発明の範疇に含まれる。
また、前述した実施形態は、何れも本発明を実施するにあたっての具体化の例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその技術思想、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【図面の簡単な説明】
【0132】
【図1】本発明の実施形態を示し、結晶粒解析装置で行われる解析方法の一例を概念的に示す図である。
【図2】本発明の実施形態を示し、解析対象領域付近において結晶粒をモデル化した様子の一例を示す図である。
【図3】本発明の実施形態を示し、結晶粒解析装置の機能構成の一例を示すブロック図である。
【図4】本発明の実施形態を示し、結晶粒画像と、二重点及び三重点と、ライン及び粒界との一例を示す図である。
【図5】本発明の実施形態を示し、解析対象領域の境界線上に設定される点と、解析対象領域の境界線を含む位置に設定されるライン及び粒界の一例を示す図である。
【図6】本発明の実施形態を示し、二重点に生じる駆動力の計算方法の一例を説明する図である。
【図7】本発明の実施形態を示し、三重点に生じる駆動力の計算方法の一例を説明する図である。
【図8】本発明の実施形態を示し、解析対象領域の境界線上にある点に生じる駆動力の計算方法の一例を説明する図である。
【図9−1】本発明の実施形態を示し、結晶粒解析装置が行う処理動作の一例を説明するフローチャートである。
【図9−2】本発明の実施形態を示し、図9−1に続くフローチャートである。
【図9−3】本発明の実施形態を示し、図9−2に続くフローチャートである。
【図9−4】本発明の実施形態を示し、図9−3に続くフローチャートである。
【図10】本発明の実施形態を示し、熱延巻き取り温度と、サンプルの数との関係の一例を示す図である。
【図11】本発明の実施形態を示し、1つのコイルに対する焼鈍条件であって、相対的に熱延巻き取り温度が中程度の部分の焼鈍条件と、相対的に熱延巻き取り温度が高い部分の焼鈍条件と、相対的に熱延巻き取り温度が低い部分の焼鈍条件との一例を示す図である。
【図12】本発明の実施形態を示し、解析対象領域の境界線上にある境界点に生じる駆動力の計算方法の他の例を説明する図である。
【符号の説明】
【0133】
100 結晶粒解析装置
101 結晶画像取得部
102 結晶画像表示部
103 点設定部
104 ライン設定部
105 粒界設定部
106 解析温度設定部
107 方位設定部
108 粒界エネルギー記憶部
109 粒界エネルギー設定部
110 易動度記憶部
111 易動度設定部
112 解析時間設定部
113 解析点判別部
114 二重点用駆動力計算部
115 三重点用駆動力計算部
116 位置計算部
118 境界点用駆動力計算部
200 表示装置
300 操作装置
a 結晶粒
i 二重点、三重点、境界点
p ライン
u 粒界
【特許請求の範囲】
【請求項1】
金属材料における結晶の画像信号を取得する画像信号取得手段と、
前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定手段と、
前記点設定手段により設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更手段とを有することを特徴とする結晶粒解析装置。
【請求項2】
前記境界点位置変更手段は、前記解析対象領域の境界線に対して、前記境界点と隣接する点と線対称となる位置に仮想的な仮想点を設定する仮想点設定手段と、
前記境界点と、前記境界点に隣接する点と、前記仮想点とにより定まる円弧の曲率と、前記境界点が属する粒界に対して設定された単位長さ当たりの粒界エネルギーとの積に基づく大きさを有し、且つ前記境界点から前記円弧の曲率中心に向かう方向を有するベクトルを、前記境界点に生じる駆動力として演算する駆動力演算手段と、
前記駆動力演算手段により演算された駆動力を用いて、前記境界点の時間の経過に伴う新たな位置を演算する位置演算手段とを有することを特徴とする請求項1に記載の結晶粒解析装置。
【請求項3】
前記仮想点設定手段は、前記境界点と隣接する点の数がm個(mは2以上の整数)ある場合、前記解析対象領域の境界線に対して、前記m個の点と線対称となる位置にm個の仮想点を設定し、
前記駆動力演算手段は、前記境界点に生じる駆動力を、前記m個の仮想点毎に演算し、
前記位置演算手段は、前記駆動力演算手段により演算された駆動力を用いて、前記境界点にかわる前記m個の境界点の位置を演算することを特徴とする請求項2に記載の結晶粒解析装置。
【請求項4】
前記仮想点設定手段は、前記境界点が、前記解析対象領域の角にある場合、前記解析対象領域の境界線に対して、前記境界点に隣接する点と線対称となる位置に2個の仮想点を設定し、
前記駆動力演算手段は、前記境界点に生じる駆動力を、前記2個の仮想点毎に演算し、
前記位置演算手段は、前記駆動力演算手段により演算された駆動力のうち、値が大きい方の駆動力を用いて、前記境界点の新たな位置を演算することを特徴とする請求項2又は3に記載の結晶粒解析装置。
【請求項5】
金属材料における結晶の画像信号を取得する画像信号取得ステップと、
前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定ステップと、
前記点設定ステップにより設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更ステップとを有することを特徴とする結晶粒解析方法。
【請求項6】
金属材料における結晶の画像信号を取得する画像信号取得ステップと、
前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定ステップと、
前記点設定ステップにより設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更ステップとをコンピュータに実行させることを特徴とするコンピュータプログラム。
【請求項1】
金属材料における結晶の画像信号を取得する画像信号取得手段と、
前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定手段と、
前記点設定手段により設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更手段とを有することを特徴とする結晶粒解析装置。
【請求項2】
前記境界点位置変更手段は、前記解析対象領域の境界線に対して、前記境界点と隣接する点と線対称となる位置に仮想的な仮想点を設定する仮想点設定手段と、
前記境界点と、前記境界点に隣接する点と、前記仮想点とにより定まる円弧の曲率と、前記境界点が属する粒界に対して設定された単位長さ当たりの粒界エネルギーとの積に基づく大きさを有し、且つ前記境界点から前記円弧の曲率中心に向かう方向を有するベクトルを、前記境界点に生じる駆動力として演算する駆動力演算手段と、
前記駆動力演算手段により演算された駆動力を用いて、前記境界点の時間の経過に伴う新たな位置を演算する位置演算手段とを有することを特徴とする請求項1に記載の結晶粒解析装置。
【請求項3】
前記仮想点設定手段は、前記境界点と隣接する点の数がm個(mは2以上の整数)ある場合、前記解析対象領域の境界線に対して、前記m個の点と線対称となる位置にm個の仮想点を設定し、
前記駆動力演算手段は、前記境界点に生じる駆動力を、前記m個の仮想点毎に演算し、
前記位置演算手段は、前記駆動力演算手段により演算された駆動力を用いて、前記境界点にかわる前記m個の境界点の位置を演算することを特徴とする請求項2に記載の結晶粒解析装置。
【請求項4】
前記仮想点設定手段は、前記境界点が、前記解析対象領域の角にある場合、前記解析対象領域の境界線に対して、前記境界点に隣接する点と線対称となる位置に2個の仮想点を設定し、
前記駆動力演算手段は、前記境界点に生じる駆動力を、前記2個の仮想点毎に演算し、
前記位置演算手段は、前記駆動力演算手段により演算された駆動力のうち、値が大きい方の駆動力を用いて、前記境界点の新たな位置を演算することを特徴とする請求項2又は3に記載の結晶粒解析装置。
【請求項5】
金属材料における結晶の画像信号を取得する画像信号取得ステップと、
前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定ステップと、
前記点設定ステップにより設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更ステップとを有することを特徴とする結晶粒解析方法。
【請求項6】
金属材料における結晶の画像信号を取得する画像信号取得ステップと、
前記結晶に含まれる結晶粒の粒界と、前記画像信号に基づく解析対象領域の境界線との交点に対応する境界点と、前記境界点とは異なる点であって、前記結晶に含まれる結晶粒の粒界に対応する非境界点とが、前記画像信号に基づいて指定されると、その指定された点を設定する点設定ステップと、
前記点設定ステップにより設定された境界点に関する情報と、当該境界点に隣接する点に関する情報とを用いて、前記境界点と、前記境界点に隣接する点とを相互に最短距離で結ぶラインの長さが短くなる方向に、前記境界点の位置を変更する境界点位置変更ステップとをコンピュータに実行させることを特徴とするコンピュータプログラム。
【図1】

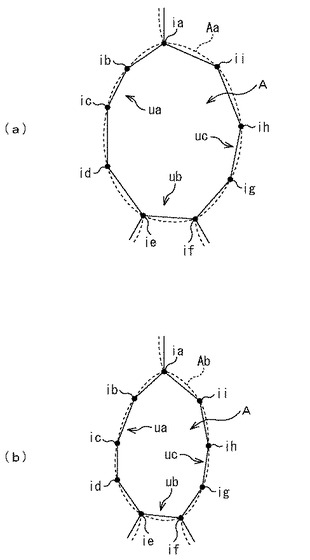
【図2】
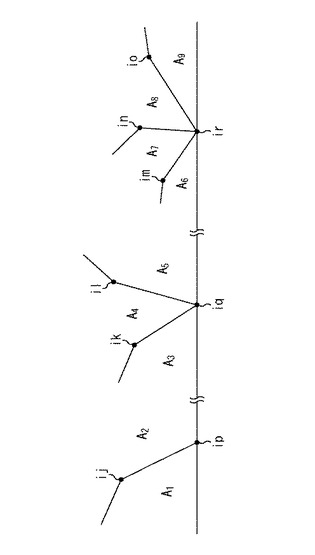
【図3】
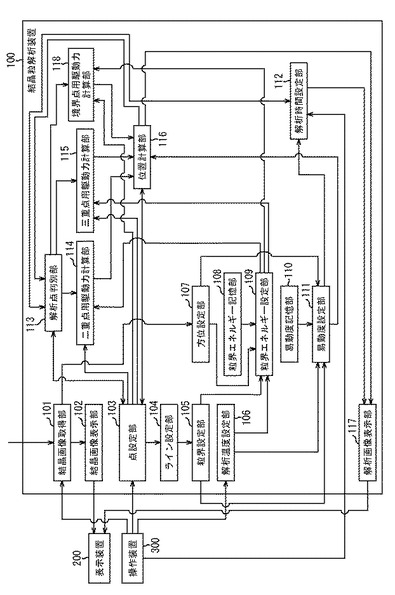
【図4】
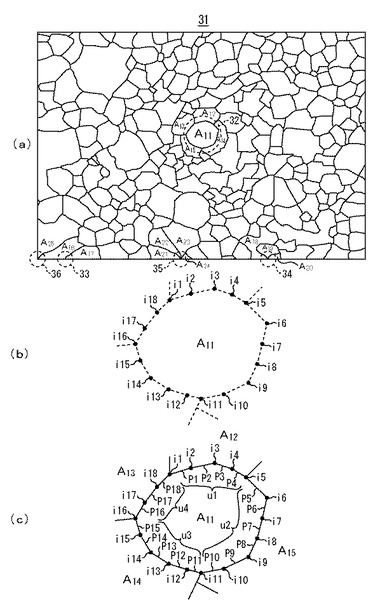
【図5】
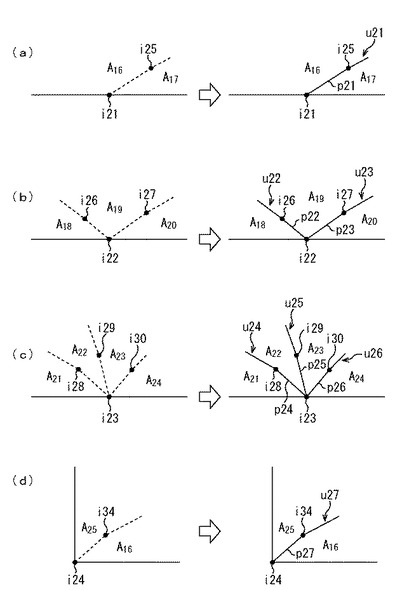
【図6】
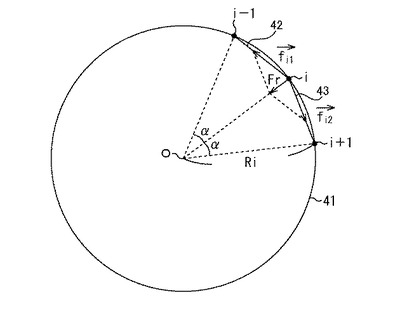
【図7】
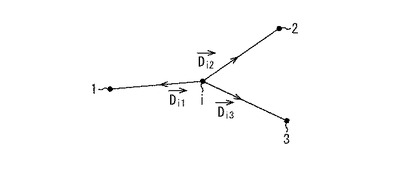
【図8】
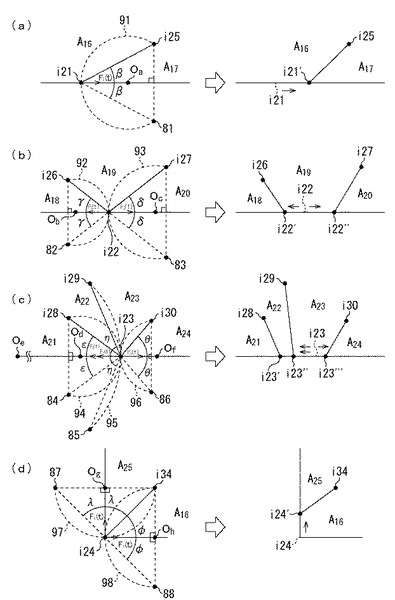
【図9−1】
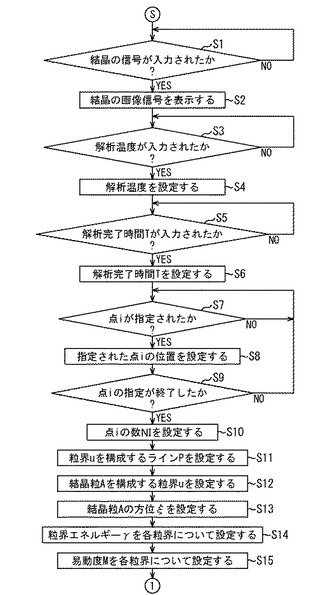
【図9−2】
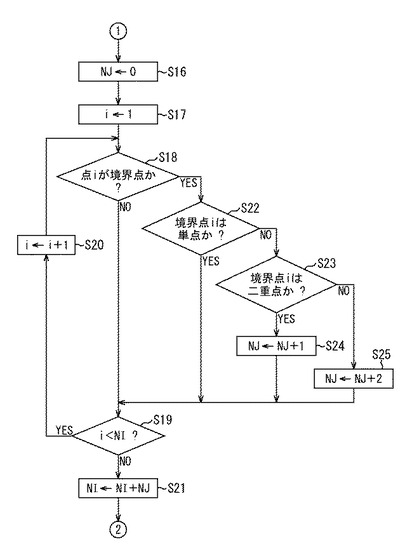
【図9−3】
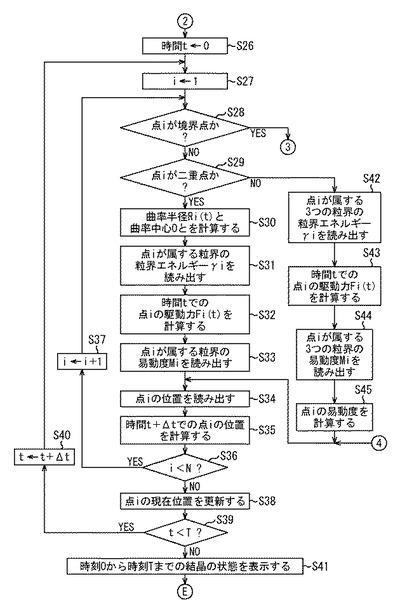
【図9−4】
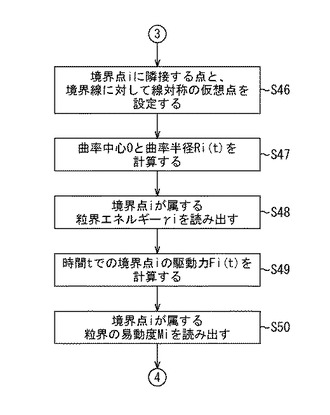
【図10】
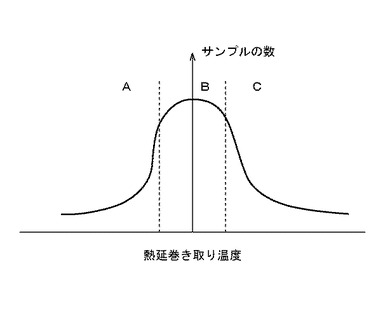
【図11】
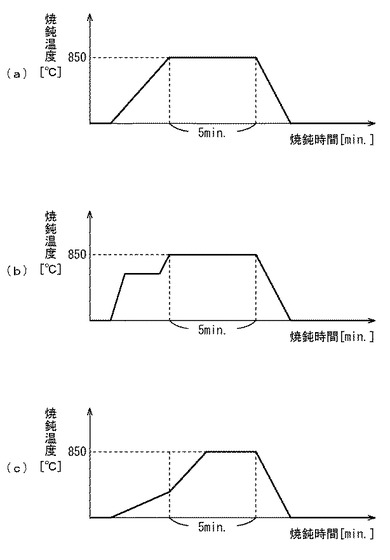
【図12】
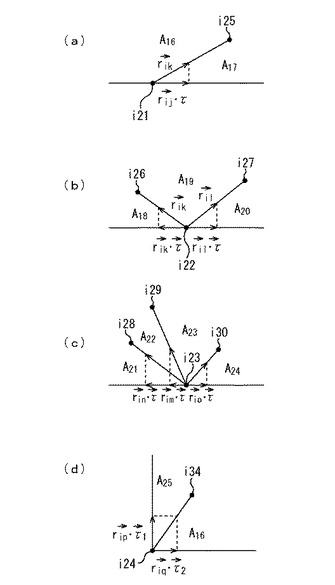
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9−1】
【図9−2】
【図9−3】
【図9−4】
【図10】
【図11】
【図12】
【公開番号】特開2009−229306(P2009−229306A)
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願番号】特願2008−76540(P2008−76540)
【出願日】平成20年3月24日(2008.3.24)
【出願人】(000006655)新日本製鐵株式会社 (6,474)
【Fターム(参考)】
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願日】平成20年3月24日(2008.3.24)
【出願人】(000006655)新日本製鐵株式会社 (6,474)
【Fターム(参考)】
[ Back to top ]