
絞り具の装着装置
【課題】絞りの自動化を容易にするとともに斬新な模様形成を可能にする。
【解決手段】布材Nを押し込むためのニードル31と、当該ニードル31を受け入れる収容穴11を備え、押し込まれた布材Nの外周に圧接する開口111,112を収容穴11の内周に形成した絞り具1と、当該絞り具1が挿置される凹所271を備えたカートリッジ27と、ニードル31を保持してこれを押し込み方向と引き出し方向へ移動させるロボットハンドと、絞り具1の収容穴11内に布材Nを押し込んだ状態でニードル31が引き出された時に当該ニードル31と一体に凹所271から引き出される絞り具1を、ニードル31の先端方向へ押しやって、絞り具1を布材Nと共にニードル31から離脱させる操作片42とを備える。
【解決手段】布材Nを押し込むためのニードル31と、当該ニードル31を受け入れる収容穴11を備え、押し込まれた布材Nの外周に圧接する開口111,112を収容穴11の内周に形成した絞り具1と、当該絞り具1が挿置される凹所271を備えたカートリッジ27と、ニードル31を保持してこれを押し込み方向と引き出し方向へ移動させるロボットハンドと、絞り具1の収容穴11内に布材Nを押し込んだ状態でニードル31が引き出された時に当該ニードル31と一体に凹所271から引き出される絞り具1を、ニードル31の先端方向へ押しやって、絞り具1を布材Nと共にニードル31から離脱させる操作片42とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は絞り工程を自動化できる絞り具の装着装置に関する。
【背景技術】
【0002】
絞りは、従来、布材の一部を糸で縛ったり、縫い締めたりする、いわゆる括り作業によって圧力をかけて布材を染めることによって、圧力のかかった部分に染料が浸入しないようにして布材に模様を形成するものである。上記括り作業は人手を要するものであるため、労賃の安い開発途上国との価格競争では不利である。また、近年、ポリエステル材に絞りによる変形を付与して、ゴム紐等を使用するよりも身体に優しい伸縮性のある衣類を実現する試みもなされており、このような日用品の分野で絞りの自動化が熱望されている。
【0003】
なお、特許文献1には、括り作業を形状記憶樹脂の線材で行なうことにより、線材の原形形状への復元性を利用して布材を強固に締め付けるようした絞り製品の製造法が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−49779
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は前述の要請に応えてなされたもので、絞りの自動化を容易にし、併せて斬新な模様形成を可能とした絞り具の装着装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本第1発明では、布材(N)を押し込むための棒体(31)と、当該棒体(31)を受け入れる収容穴(11)を備え、押し込まれた布材(N)の外周に圧接する圧接部(111,112)を前記収容穴(11)の内周に形成した絞り具(1)と、当該絞り具(1)が挿置される凹所(271)を備えた絞り具保持部材(27)と、前記棒体(31)を保持してこれを押し込み方向と引き出し方向へ移動させる棒体駆動手段(H)と、絞り具(1)の収容穴(11)内に布材(N)を押し込んだ状態で前記棒体(31)が引き出された時に当該棒体(31)と一体に前記凹所(271)から引き出される前記絞り具(1)を、前記棒体(31)の先端方向へ押しやって、絞り具(1)を布材(N)と共に前記棒体(31)から離脱させる絞り具離脱手段(4)とを備える。
【0007】
本第1発明において、棒材駆動手段によって棒材を押し込み方向へ移動させて布材を棒材で絞り具の収容穴内へ押し込むと、絞り具の圧接部が布材の外周に圧接する。棒材を引き出し方向へ移動させると、絞り具の収容穴内に布材を押し込んだ状態で棒体が引き出される。そこで、絞り具離脱手段によって絞り具を布材と共に棒体から離脱させる。絞り具はその収容穴内に押し込まれた布材の外周に圧接しており、このようにして布材の絞り部位に絞り具が装着される。本第1発明によれば、従来の括り作業が不要であるから絞りの自動化が容易になるとともに、括りでは得られない斬新な模様形成が可能である。
【0008】
本第2発明では、前記絞り具離脱手段(3)は、前記棒体(31)が挿通され当該棒体(31)よりもやや大きいしごき穴(421)を設けた操作部材(42)と、当該操作部材(42)を棒体(31)に沿って先端方向へ移動させる駆動手段(49)を備えている。
【0009】
本第2発明においては、駆動手段によって操作部材を棒体に沿って先端方向へ移動させることによって絞り具を布材と共に棒体から容易に離脱させることができる。
【0010】
本第3発明では、前記絞り具保持部材(27)に前記凹所(271)を複数設けてそれぞれの凹所(271)内に前記絞り具(1)を挿置し、当該絞り具(1)が一の凹所(271)から引き出された後に、前記絞り具(1)が挿置された他の凹所(271)が前記棒体(31)と対向する位置に至るように前記絞り具保持部材(27)を移動させる移動駆動手段(2)を設ける。
【0011】
本第3発明によれば、移動駆動手段によって絞り具を順次棒体と対向する位置に至らせることができるから、布材への絞り具の連続的な装着が容易となる。
【0012】
本第4発明では、前記移動駆動手段(2)は可動部材(24)を備えており、前記絞り具保持部材(27)は可動部材(24)に着脱可能に設けられている。
【0013】
本第4発明においては、凹所内に挿置された絞り具を全て布材に装着して空になった絞り具保持部材を可動部材から離脱させ、これに代えて、絞り具を全ての凹所内に予め挿置した新たな絞り具保持部材を可動部材に装着することにより、無駄時間を最小限にして布材への絞り具の装着をさらに効率的に行うことができる。
【0014】
なお、上記カッコ内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明の効果】
【0015】
以上のように、本発明の絞り具の装着装置によれば、絞りの自動化が容易となり、しかも斬新な模様形成が可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明の装着装置によって布材に装着される絞り具の一例を示す断面図である。
【図2】絞り具の平面図である。
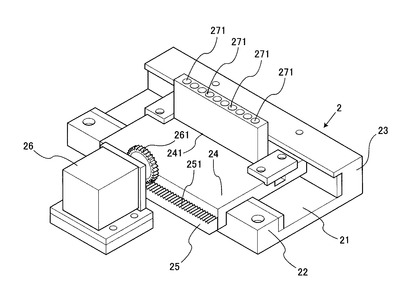
【図3】装着装置の全体斜視図である。
【図4】移動駆動機構の斜視図である。
【図5】移動駆動機構と布材押込み機構の横断面図である。
【図6】絞り具離脱機構の斜視図である。
【図7】絞り具の布材への装着工程を示す断面図である。
【図8】絞り具の布材への装着工程を示す断面図である。
【図9】布材に装着された絞り具の側面図である。
【図10】絞り模様の一例を示す平面図である。
【発明を実施するための形態】
【0017】
なお、以下に説明する実施形態はあくまで一例であり、本発明の要旨を逸脱しない範囲で当業者が行う種々の設計的改良も本発明の範囲に含まれる。
【0018】
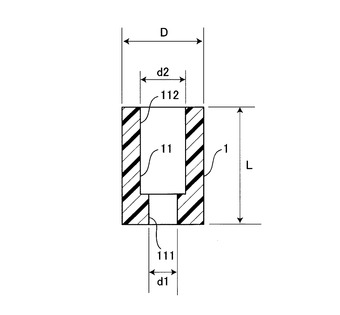
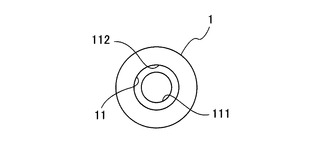
図1、図2には本発明で使用する絞り具の一例の断面図と平面図をそれぞれ示す。絞り具1は硬度50度程度のシリコンゴム材を切削加工して得たもので、全体が円筒形となっている。円筒形の絞り具1内には収容穴11としての円形の貫通孔が軸方向へ形成されており、貫通孔はその内径が一端で段付きに小径となっている。これにより、絞り具の収容穴11は一端の第1開口111が他端の第2開口112よりも小径となっている。このような絞り具1の各部寸法の一例は、絞りの対象となる布材の厚みが0.2mmである場合に、全長L=8mm、外径D=6mm、第1開口111の内径d1=1.6mm、その長さ=2mm、第2開口112の内径d2=2.8mmに設定すると良い。なお、絞り具1の周壁の肉厚は1.2mm〜1.7mm程度とするのが好ましい。
【0019】
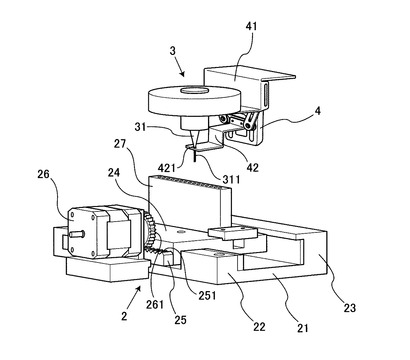
このような絞り具1を布材に装着する場合には図3に示す装着装置を使用する。装着装置は、フロア側に設けられた移動駆動機構2と、棒体駆動手段としてのロボットハンドH(図5参照)の先端に設けられた布材押込み機構3とで構成されている。その詳細を図4および図5を参照しつつ以下に説明する。移動駆動機構2はフロアに固定された矩形のベース体21を備えており、当該ベース体21の両側には平行にガイドレール22,23が突出形成されている。そして、これらガイドレール22,23に幅方向を規制されて可動部材としての可動ベース体24がガイドレール22,23に沿って直線往復動可能に配設されている。
【0020】
可動ベース体24の一方の側縁には、歯形251を上方へ向けてラック部材25が固定されており、当該ラック部材25の歯形251にギア体261が噛合している。ギア体261はステッピングモータ26の出力軸262(図5)に装着されている。これにより、図略の制御装置の出力でステッピングモータ26が駆動されて、ギア体261とラック部材251を介して可動ベース体24が必要量だけ直線移動させられる。
【0021】
可動べース体24の他方の側縁に近い板面上には当該可動ベース体24の移動方向へ延びる直線溝241が形成されて、ここに、絞り具保持部材としての厚肉板体のカートリッジ27が起立姿勢で嵌着されている。すなわち、カートリッジ27は板体の下縁が直線溝241内に押し込まれて起立姿勢に保持されるとともに、その上端面には長手方向へ一定間隔をおいて複数(本実施形態では10個)の凹所271が形成されている。凹所271は円柱状に窪んで、その深さは絞り具1の全長L(図1)に等しく、凹所271の内径は、絞り具1の後述する弾性拡径変形を見込んでその外径Dよりもやや(例えば1mm程度)大きくしてある。
【0022】
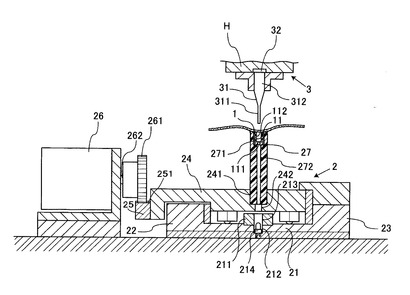
上記各凹所271内には予め図5に示すように絞り具1が、その第1開口111が凹所271の底面に向くように挿置されている。カートリッジ27の板体内には上記各凹所271の底面中心から下方へ延びる貫通穴272が形成されており、これら貫通穴272はカートリッジ27の下端面に開口している。
【0023】
可動ベース体24の直線溝241の溝底面には上記貫通孔272に連通する長穴242が可動ベース体24の移動方向へ形成されている。長穴242に対向するベース体21の上面には、可動ベース体24の移動方向の一箇所にボス部211が設けられて、その中心にベース体21に形成した凹陥部212に連通する貫通孔213が形成されている。凹陥部212内には発光ダイオード(LED)214が設置されており、その出力光が、貫通孔213,272を経て凹所271内に位置する絞り具1の第1開口111へ至り、収容穴11を経てその第2開口112から上方へ向かっている。この発光ダイオード214の光軸は、布材押込み機構3に設けた棒体としてのニードル31の軸中心に一致している。
【0024】
ニードル31はロボットハンドH(図5)の先端に下方へ向けて垂設されており、ニードル31は小径の針部311とロボットハンドHに装着される大径の基部312よりなる。ニードル31の背後にはロードセル32が設置されて、ニードル31による後述の布材Nの押し込み時に過大な負荷が生じた場合には押し込みを中止して、布材Nの破損を回避するようにしている。なお、ニードル31の、針部311の外径の一例は1mmφである。
【0025】
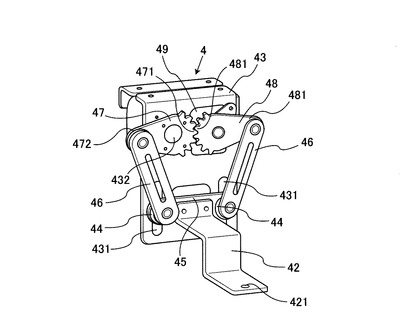
ロボットハンドHの先端には図3に示すステー41によって絞り具離脱機構4が取り付けられており、絞り具離脱機構4から延びる操作片42の先端がニードル31に向けて延びている。絞り具離脱機構4の詳細を図6に示す。図6において、絞り具離脱機構4は上記ステー41(図3)に連結される本体枠43を備えており、本体枠43の下半には左右位置に上下方向へ延びる長穴状のガイド穴431が形成されている。そして各ガイド穴431内にこれに沿って上下動可能に円形の摺動部材44が配設されている。
【0026】
左右の摺動部材44の間に水平姿勢のリンク板45が架設されており、リンク板45の中央に上記操作片42の基端が固定されている。操作片42は途中で段付きに屈曲しつつ前方へ延び、水平となった板面先端に円形のしごき穴421が形成されて、ここにニードル31の針部311が挿通されている(図3)。なお、しごき穴421の内径は針部311の外径よりもやや大きい程度としてある。
【0027】
左右の摺動部材44にはそれぞれ斜め上方へ延びるリンク板46の下端が連結されている。本体枠43の上半には左右位置に歯車体47,48が設けられている。歯車体48は、本体枠43の背後に設置された駆動モータ49の出力軸に装着されており、他方の歯車体47は本体枠43に支持された回転軸432に装着されている。そして、これら歯車体47,48は互いの対向する周面に形成された歯形471,481が噛合している。これにより、駆動モータ49によって歯車体48が一定量回動させられると、歯車体47も反対方向へ同量回動させられる。
【0028】
各歯車体47,48からはそれぞれ外方へリンク部472,481が延出しており、各リンク部472,481の先端に上記リンク板46の上端が連結されている。このような構造により、駆動モータ49によって歯車体47,48を互いに反対方向へ同量正逆回動させると、これに伴ってリンク板46が上下方向へ移動し、リンク板45および操作片42が昇降させられる。なお、上記ステッピングモータ26(図4)、駆動モータ49(図6)、ロボットハンドH(図3)は図略の制御装置の出力信号でそれぞれ作動させられて、以下に説明する絞り具装着工程が遂行される。
【0029】
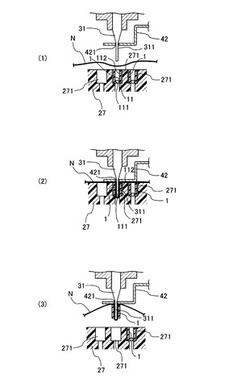
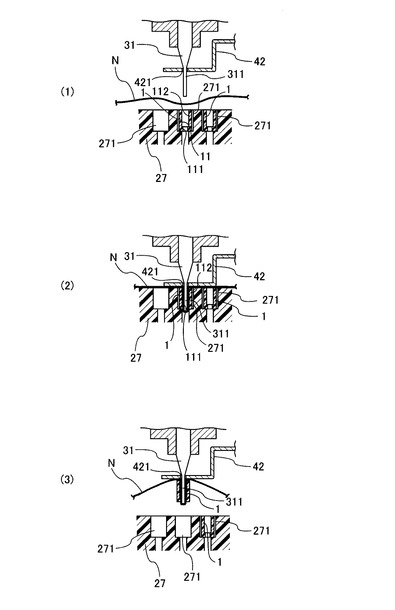
このような装着装置で絞り具1を布材Nに装着する場合には、ステッピングモータ26によって可動ベース体24を適当に移動させて、図7(1)に示すように、カートリッジ27の、絞り具1が挿置された凹所271の一つをニードル31の直下に位置させる。この際、駆動モータ49によって操作片42は最上位置へ引き上げておく。
【0030】
その後、上記凹所271とニードル31の間に布材Nを位置させ、布材Nの絞り部位を、凹所271内に挿置された絞り具1の第2開口112の位置に合致させる。この際、第2開口112は下方からLED光で照らされているから、布材Nの絞り部位に付されたマークが第2開口112に合致したか否かを容易に判定することができる。
【0031】
この状態でロボットハンドHを下降させて、ニードル31の針部311で布材Nを絞り具1の収容穴11内へ押し込む(図7(2))。この際、シリコンゴム材で構成された絞り具1は針部311の先端側が位置する第1開口111と針部311の基端側が位置する第2開口112がそれぞれ弾性的に拡径変形して布材Nを受け入れる。ニードル針部311の先端は第1開口111を経て下方へ突出し、これに伴って布材Nも一部が第1開口111から絞り具1外へ露出する。
【0032】
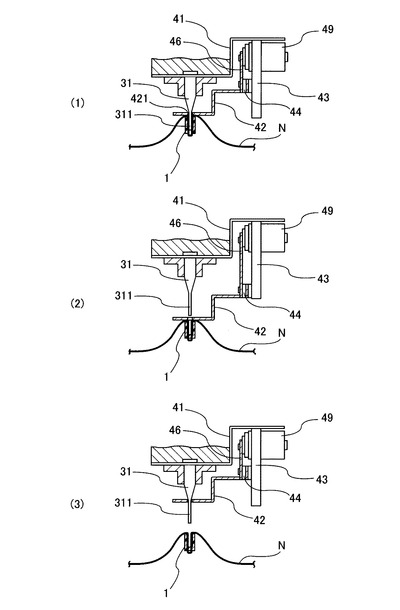
この後、ロボットハンドHを上昇させると、拡径変形された絞り具1はその収縮弾性力によって布材Nと共にニードル31と一体に凹所271内から上方へ引き出される(図7(3))。そこで、駆動モータ49を作動させて操作片42を図8(1)に示す最上位置から図8(2)に示すように、ニードル31先端(下端)よりも下方の最下位置まで下降させる。これにより、絞り具1は布材Nと共にニードル31の先端方向へ押しやられて当該ニードル31から下方へ離脱させられる(図8(3))。
【0033】
この際、絞り具1の第1開口111(図1、図2参照)および第2開口112が原形に復して縮径し、押し込まれた布材Nの外周に上記各開口111,112の内周面が圧接する。ここで、第2開口112付近では絞られた布材Nの容積が大きくなっているから実際には第2開口112内には布材Nが充満しており、当該開口112の内周面は布材Nの外周に十分な圧接力で圧接する。このようにして布材Nの絞り部位に絞り具1が装着される。
【0034】
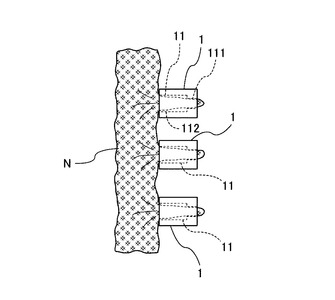
続いて、ステッピングモータ26によって可動ベース体24を移動させて、カートリッジ27の、絞り具1が挿置された新たな凹所271をニードル31の直下に位置させる。そして、上述と同様の工程で絞り具1を布材Nの他の絞り部位に装着する。このようにして、可動ベース体24上のカートリッジ27を順次その長手方向へ移動させて、絞り具1が挿置された新たな凹所271をニードル31の直下に位置させて、複数(本実施形態では10個)の絞り具1を布材Nの各絞り部位に装着する(図9)。凹所271内の絞り具1を全て布材に装着して空になったカートリッジ27は可動ベース体24の直線溝241内から上方へ抜き出され、これに代えて、全ての凹所271内に絞り具1が挿置された新たなカートリッジ27が直線溝241内に嵌着されて、上述の工程で布材Nへの絞り具1の装着が行われる。
【0035】
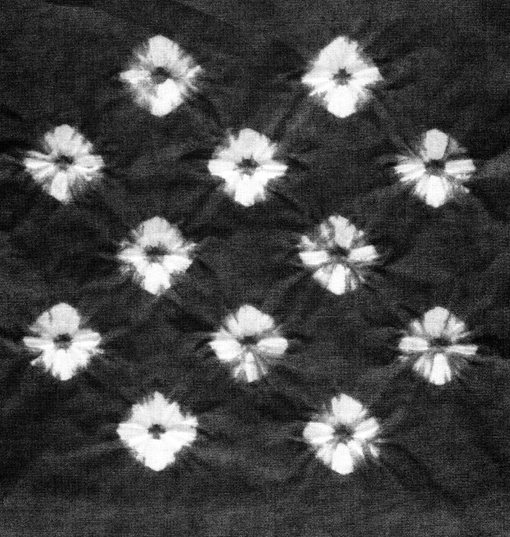
絞り具1を装着した布材Nを染料中に浸漬すると、絞り具1内には染料が浸入しないから、絞り具1を装着した部分は染料で染まらず白抜きとなった絞り模様が得られる(図10)。絞り具1を使用したことにより、従来の糸とは異なる斬新な絞り模様が形成されており、絞り具1の内周面形状を適宜変更することによってさらに多様な模様を形成することが可能である。
【0036】
染め工程が終わった後は布材Nに張力を与えるように引っ張れば、第1開口111と第2開口112で弾性的に布材Nに装着されていた絞り具1は容易に布材Nから離脱させられる。離脱させた絞り具1は再使用可能である。なお、布材Nとしてポリエステル材等を使用して、絞り具1を装着した布材Nに湿熱等の処理を施すことにより、絞りによる変形を付与した伸縮性のある衣類を得ることができ、この場合には布材を必ずしも染料に浸す必要は無い。
【0037】
このように、本発明の絞り具を使用すると、従来の糸等を使用した括り作業が不要となるから、絞り工程の自動化と工程全体の時間短縮が可能となり、価格競争力のある安価な絞り製品を提供することができる。
【0038】
なお、上記実施形態において、布材の移送は自動装置で行なうことができる。また、絞り具は上記実施形態のように必ずしもシリコンゴムの如き全体を弾性のある材料で構成する必要はなく、収容穴の内周面に弾性圧接部を形成する等の構造でも良いが、全体を弾性のある材料で構成した方が構造簡易かつ安価に実現できる。また、上記実施形態では絞り具離脱機構をロボットハンドに一体に設けたが、これに代えて、操作片を別のロボットハンドに把持させて絞り具離脱作業を行わせるようにしても良い。
【符号の説明】
【0039】
1…絞り具、11…収容穴、111…第1開口(圧接部)、112…第2開口(圧接部)、2…移動駆動機構、24…可動ベース体(可動部材)、27…カートリッジ(絞り具保持部材)、271…凹所、31…ニードル(棒体)、311…針部、4…絞り具離脱機構、H…ロボットハンド(棒体駆動手段)、N…布材。
【技術分野】
【0001】
本発明は絞り工程を自動化できる絞り具の装着装置に関する。
【背景技術】
【0002】
絞りは、従来、布材の一部を糸で縛ったり、縫い締めたりする、いわゆる括り作業によって圧力をかけて布材を染めることによって、圧力のかかった部分に染料が浸入しないようにして布材に模様を形成するものである。上記括り作業は人手を要するものであるため、労賃の安い開発途上国との価格競争では不利である。また、近年、ポリエステル材に絞りによる変形を付与して、ゴム紐等を使用するよりも身体に優しい伸縮性のある衣類を実現する試みもなされており、このような日用品の分野で絞りの自動化が熱望されている。
【0003】
なお、特許文献1には、括り作業を形状記憶樹脂の線材で行なうことにより、線材の原形形状への復元性を利用して布材を強固に締め付けるようした絞り製品の製造法が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−49779
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は前述の要請に応えてなされたもので、絞りの自動化を容易にし、併せて斬新な模様形成を可能とした絞り具の装着装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本第1発明では、布材(N)を押し込むための棒体(31)と、当該棒体(31)を受け入れる収容穴(11)を備え、押し込まれた布材(N)の外周に圧接する圧接部(111,112)を前記収容穴(11)の内周に形成した絞り具(1)と、当該絞り具(1)が挿置される凹所(271)を備えた絞り具保持部材(27)と、前記棒体(31)を保持してこれを押し込み方向と引き出し方向へ移動させる棒体駆動手段(H)と、絞り具(1)の収容穴(11)内に布材(N)を押し込んだ状態で前記棒体(31)が引き出された時に当該棒体(31)と一体に前記凹所(271)から引き出される前記絞り具(1)を、前記棒体(31)の先端方向へ押しやって、絞り具(1)を布材(N)と共に前記棒体(31)から離脱させる絞り具離脱手段(4)とを備える。
【0007】
本第1発明において、棒材駆動手段によって棒材を押し込み方向へ移動させて布材を棒材で絞り具の収容穴内へ押し込むと、絞り具の圧接部が布材の外周に圧接する。棒材を引き出し方向へ移動させると、絞り具の収容穴内に布材を押し込んだ状態で棒体が引き出される。そこで、絞り具離脱手段によって絞り具を布材と共に棒体から離脱させる。絞り具はその収容穴内に押し込まれた布材の外周に圧接しており、このようにして布材の絞り部位に絞り具が装着される。本第1発明によれば、従来の括り作業が不要であるから絞りの自動化が容易になるとともに、括りでは得られない斬新な模様形成が可能である。
【0008】
本第2発明では、前記絞り具離脱手段(3)は、前記棒体(31)が挿通され当該棒体(31)よりもやや大きいしごき穴(421)を設けた操作部材(42)と、当該操作部材(42)を棒体(31)に沿って先端方向へ移動させる駆動手段(49)を備えている。
【0009】
本第2発明においては、駆動手段によって操作部材を棒体に沿って先端方向へ移動させることによって絞り具を布材と共に棒体から容易に離脱させることができる。
【0010】
本第3発明では、前記絞り具保持部材(27)に前記凹所(271)を複数設けてそれぞれの凹所(271)内に前記絞り具(1)を挿置し、当該絞り具(1)が一の凹所(271)から引き出された後に、前記絞り具(1)が挿置された他の凹所(271)が前記棒体(31)と対向する位置に至るように前記絞り具保持部材(27)を移動させる移動駆動手段(2)を設ける。
【0011】
本第3発明によれば、移動駆動手段によって絞り具を順次棒体と対向する位置に至らせることができるから、布材への絞り具の連続的な装着が容易となる。
【0012】
本第4発明では、前記移動駆動手段(2)は可動部材(24)を備えており、前記絞り具保持部材(27)は可動部材(24)に着脱可能に設けられている。
【0013】
本第4発明においては、凹所内に挿置された絞り具を全て布材に装着して空になった絞り具保持部材を可動部材から離脱させ、これに代えて、絞り具を全ての凹所内に予め挿置した新たな絞り具保持部材を可動部材に装着することにより、無駄時間を最小限にして布材への絞り具の装着をさらに効率的に行うことができる。
【0014】
なお、上記カッコ内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明の効果】
【0015】
以上のように、本発明の絞り具の装着装置によれば、絞りの自動化が容易となり、しかも斬新な模様形成が可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明の装着装置によって布材に装着される絞り具の一例を示す断面図である。
【図2】絞り具の平面図である。
【図3】装着装置の全体斜視図である。
【図4】移動駆動機構の斜視図である。
【図5】移動駆動機構と布材押込み機構の横断面図である。
【図6】絞り具離脱機構の斜視図である。
【図7】絞り具の布材への装着工程を示す断面図である。
【図8】絞り具の布材への装着工程を示す断面図である。
【図9】布材に装着された絞り具の側面図である。
【図10】絞り模様の一例を示す平面図である。
【発明を実施するための形態】
【0017】
なお、以下に説明する実施形態はあくまで一例であり、本発明の要旨を逸脱しない範囲で当業者が行う種々の設計的改良も本発明の範囲に含まれる。
【0018】
図1、図2には本発明で使用する絞り具の一例の断面図と平面図をそれぞれ示す。絞り具1は硬度50度程度のシリコンゴム材を切削加工して得たもので、全体が円筒形となっている。円筒形の絞り具1内には収容穴11としての円形の貫通孔が軸方向へ形成されており、貫通孔はその内径が一端で段付きに小径となっている。これにより、絞り具の収容穴11は一端の第1開口111が他端の第2開口112よりも小径となっている。このような絞り具1の各部寸法の一例は、絞りの対象となる布材の厚みが0.2mmである場合に、全長L=8mm、外径D=6mm、第1開口111の内径d1=1.6mm、その長さ=2mm、第2開口112の内径d2=2.8mmに設定すると良い。なお、絞り具1の周壁の肉厚は1.2mm〜1.7mm程度とするのが好ましい。
【0019】
このような絞り具1を布材に装着する場合には図3に示す装着装置を使用する。装着装置は、フロア側に設けられた移動駆動機構2と、棒体駆動手段としてのロボットハンドH(図5参照)の先端に設けられた布材押込み機構3とで構成されている。その詳細を図4および図5を参照しつつ以下に説明する。移動駆動機構2はフロアに固定された矩形のベース体21を備えており、当該ベース体21の両側には平行にガイドレール22,23が突出形成されている。そして、これらガイドレール22,23に幅方向を規制されて可動部材としての可動ベース体24がガイドレール22,23に沿って直線往復動可能に配設されている。
【0020】
可動ベース体24の一方の側縁には、歯形251を上方へ向けてラック部材25が固定されており、当該ラック部材25の歯形251にギア体261が噛合している。ギア体261はステッピングモータ26の出力軸262(図5)に装着されている。これにより、図略の制御装置の出力でステッピングモータ26が駆動されて、ギア体261とラック部材251を介して可動ベース体24が必要量だけ直線移動させられる。
【0021】
可動べース体24の他方の側縁に近い板面上には当該可動ベース体24の移動方向へ延びる直線溝241が形成されて、ここに、絞り具保持部材としての厚肉板体のカートリッジ27が起立姿勢で嵌着されている。すなわち、カートリッジ27は板体の下縁が直線溝241内に押し込まれて起立姿勢に保持されるとともに、その上端面には長手方向へ一定間隔をおいて複数(本実施形態では10個)の凹所271が形成されている。凹所271は円柱状に窪んで、その深さは絞り具1の全長L(図1)に等しく、凹所271の内径は、絞り具1の後述する弾性拡径変形を見込んでその外径Dよりもやや(例えば1mm程度)大きくしてある。
【0022】
上記各凹所271内には予め図5に示すように絞り具1が、その第1開口111が凹所271の底面に向くように挿置されている。カートリッジ27の板体内には上記各凹所271の底面中心から下方へ延びる貫通穴272が形成されており、これら貫通穴272はカートリッジ27の下端面に開口している。
【0023】
可動ベース体24の直線溝241の溝底面には上記貫通孔272に連通する長穴242が可動ベース体24の移動方向へ形成されている。長穴242に対向するベース体21の上面には、可動ベース体24の移動方向の一箇所にボス部211が設けられて、その中心にベース体21に形成した凹陥部212に連通する貫通孔213が形成されている。凹陥部212内には発光ダイオード(LED)214が設置されており、その出力光が、貫通孔213,272を経て凹所271内に位置する絞り具1の第1開口111へ至り、収容穴11を経てその第2開口112から上方へ向かっている。この発光ダイオード214の光軸は、布材押込み機構3に設けた棒体としてのニードル31の軸中心に一致している。
【0024】
ニードル31はロボットハンドH(図5)の先端に下方へ向けて垂設されており、ニードル31は小径の針部311とロボットハンドHに装着される大径の基部312よりなる。ニードル31の背後にはロードセル32が設置されて、ニードル31による後述の布材Nの押し込み時に過大な負荷が生じた場合には押し込みを中止して、布材Nの破損を回避するようにしている。なお、ニードル31の、針部311の外径の一例は1mmφである。
【0025】
ロボットハンドHの先端には図3に示すステー41によって絞り具離脱機構4が取り付けられており、絞り具離脱機構4から延びる操作片42の先端がニードル31に向けて延びている。絞り具離脱機構4の詳細を図6に示す。図6において、絞り具離脱機構4は上記ステー41(図3)に連結される本体枠43を備えており、本体枠43の下半には左右位置に上下方向へ延びる長穴状のガイド穴431が形成されている。そして各ガイド穴431内にこれに沿って上下動可能に円形の摺動部材44が配設されている。
【0026】
左右の摺動部材44の間に水平姿勢のリンク板45が架設されており、リンク板45の中央に上記操作片42の基端が固定されている。操作片42は途中で段付きに屈曲しつつ前方へ延び、水平となった板面先端に円形のしごき穴421が形成されて、ここにニードル31の針部311が挿通されている(図3)。なお、しごき穴421の内径は針部311の外径よりもやや大きい程度としてある。
【0027】
左右の摺動部材44にはそれぞれ斜め上方へ延びるリンク板46の下端が連結されている。本体枠43の上半には左右位置に歯車体47,48が設けられている。歯車体48は、本体枠43の背後に設置された駆動モータ49の出力軸に装着されており、他方の歯車体47は本体枠43に支持された回転軸432に装着されている。そして、これら歯車体47,48は互いの対向する周面に形成された歯形471,481が噛合している。これにより、駆動モータ49によって歯車体48が一定量回動させられると、歯車体47も反対方向へ同量回動させられる。
【0028】
各歯車体47,48からはそれぞれ外方へリンク部472,481が延出しており、各リンク部472,481の先端に上記リンク板46の上端が連結されている。このような構造により、駆動モータ49によって歯車体47,48を互いに反対方向へ同量正逆回動させると、これに伴ってリンク板46が上下方向へ移動し、リンク板45および操作片42が昇降させられる。なお、上記ステッピングモータ26(図4)、駆動モータ49(図6)、ロボットハンドH(図3)は図略の制御装置の出力信号でそれぞれ作動させられて、以下に説明する絞り具装着工程が遂行される。
【0029】
このような装着装置で絞り具1を布材Nに装着する場合には、ステッピングモータ26によって可動ベース体24を適当に移動させて、図7(1)に示すように、カートリッジ27の、絞り具1が挿置された凹所271の一つをニードル31の直下に位置させる。この際、駆動モータ49によって操作片42は最上位置へ引き上げておく。
【0030】
その後、上記凹所271とニードル31の間に布材Nを位置させ、布材Nの絞り部位を、凹所271内に挿置された絞り具1の第2開口112の位置に合致させる。この際、第2開口112は下方からLED光で照らされているから、布材Nの絞り部位に付されたマークが第2開口112に合致したか否かを容易に判定することができる。
【0031】
この状態でロボットハンドHを下降させて、ニードル31の針部311で布材Nを絞り具1の収容穴11内へ押し込む(図7(2))。この際、シリコンゴム材で構成された絞り具1は針部311の先端側が位置する第1開口111と針部311の基端側が位置する第2開口112がそれぞれ弾性的に拡径変形して布材Nを受け入れる。ニードル針部311の先端は第1開口111を経て下方へ突出し、これに伴って布材Nも一部が第1開口111から絞り具1外へ露出する。
【0032】
この後、ロボットハンドHを上昇させると、拡径変形された絞り具1はその収縮弾性力によって布材Nと共にニードル31と一体に凹所271内から上方へ引き出される(図7(3))。そこで、駆動モータ49を作動させて操作片42を図8(1)に示す最上位置から図8(2)に示すように、ニードル31先端(下端)よりも下方の最下位置まで下降させる。これにより、絞り具1は布材Nと共にニードル31の先端方向へ押しやられて当該ニードル31から下方へ離脱させられる(図8(3))。
【0033】
この際、絞り具1の第1開口111(図1、図2参照)および第2開口112が原形に復して縮径し、押し込まれた布材Nの外周に上記各開口111,112の内周面が圧接する。ここで、第2開口112付近では絞られた布材Nの容積が大きくなっているから実際には第2開口112内には布材Nが充満しており、当該開口112の内周面は布材Nの外周に十分な圧接力で圧接する。このようにして布材Nの絞り部位に絞り具1が装着される。
【0034】
続いて、ステッピングモータ26によって可動ベース体24を移動させて、カートリッジ27の、絞り具1が挿置された新たな凹所271をニードル31の直下に位置させる。そして、上述と同様の工程で絞り具1を布材Nの他の絞り部位に装着する。このようにして、可動ベース体24上のカートリッジ27を順次その長手方向へ移動させて、絞り具1が挿置された新たな凹所271をニードル31の直下に位置させて、複数(本実施形態では10個)の絞り具1を布材Nの各絞り部位に装着する(図9)。凹所271内の絞り具1を全て布材に装着して空になったカートリッジ27は可動ベース体24の直線溝241内から上方へ抜き出され、これに代えて、全ての凹所271内に絞り具1が挿置された新たなカートリッジ27が直線溝241内に嵌着されて、上述の工程で布材Nへの絞り具1の装着が行われる。
【0035】
絞り具1を装着した布材Nを染料中に浸漬すると、絞り具1内には染料が浸入しないから、絞り具1を装着した部分は染料で染まらず白抜きとなった絞り模様が得られる(図10)。絞り具1を使用したことにより、従来の糸とは異なる斬新な絞り模様が形成されており、絞り具1の内周面形状を適宜変更することによってさらに多様な模様を形成することが可能である。
【0036】
染め工程が終わった後は布材Nに張力を与えるように引っ張れば、第1開口111と第2開口112で弾性的に布材Nに装着されていた絞り具1は容易に布材Nから離脱させられる。離脱させた絞り具1は再使用可能である。なお、布材Nとしてポリエステル材等を使用して、絞り具1を装着した布材Nに湿熱等の処理を施すことにより、絞りによる変形を付与した伸縮性のある衣類を得ることができ、この場合には布材を必ずしも染料に浸す必要は無い。
【0037】
このように、本発明の絞り具を使用すると、従来の糸等を使用した括り作業が不要となるから、絞り工程の自動化と工程全体の時間短縮が可能となり、価格競争力のある安価な絞り製品を提供することができる。
【0038】
なお、上記実施形態において、布材の移送は自動装置で行なうことができる。また、絞り具は上記実施形態のように必ずしもシリコンゴムの如き全体を弾性のある材料で構成する必要はなく、収容穴の内周面に弾性圧接部を形成する等の構造でも良いが、全体を弾性のある材料で構成した方が構造簡易かつ安価に実現できる。また、上記実施形態では絞り具離脱機構をロボットハンドに一体に設けたが、これに代えて、操作片を別のロボットハンドに把持させて絞り具離脱作業を行わせるようにしても良い。
【符号の説明】
【0039】
1…絞り具、11…収容穴、111…第1開口(圧接部)、112…第2開口(圧接部)、2…移動駆動機構、24…可動ベース体(可動部材)、27…カートリッジ(絞り具保持部材)、271…凹所、31…ニードル(棒体)、311…針部、4…絞り具離脱機構、H…ロボットハンド(棒体駆動手段)、N…布材。
【特許請求の範囲】
【請求項1】
布材を押し込むための棒体と、当該棒体を受け入れる収容穴を備え、押し込まれた布材の外周に圧接する圧接部を前記収容穴の内周に形成した絞り具と、当該絞り具が挿置される凹所を備えた絞り具保持部材と、前記棒体を保持してこれを押し込み方向と引き出し方向へ移動させる棒体駆動手段と、絞り具の収容穴内に布材を押し込んだ状態で前記棒体が引き出された時に当該棒体と一体に前記凹所から引き出される前記絞り具を、前記棒体の先端方向へ押しやって、絞り具を布材と共に前記棒体から離脱させる絞り具離脱手段とを備える絞り具の装着装置。
【請求項2】
前記絞り具離脱手段は、前記棒体が挿通され当該棒体よりもやや大きいしごき穴を設けた操作部材と、当該操作部材を棒体に沿って先端方向へ移動させる駆動手段を備えている請求項1に記載の絞り具の装着装置。
【請求項3】
前記絞り具保持部材に前記凹所を複数設けてそれぞれの凹所内に前記絞り具を挿置し、当該絞り具が一の凹所から引き出された後に、前記絞り具が挿置された他の凹所が前記棒体と対向する位置に至るように前記絞り具保持部材を移動させる移動駆動手段を設けた請求項1に記載の絞り具の装着装置。
【請求項4】
前記移動駆動手段は可動部材を備えており、前記絞り具保持部材は可動部材に着脱可能に設けられている請求項3に記載の絞り具の装着装置。
【請求項1】
布材を押し込むための棒体と、当該棒体を受け入れる収容穴を備え、押し込まれた布材の外周に圧接する圧接部を前記収容穴の内周に形成した絞り具と、当該絞り具が挿置される凹所を備えた絞り具保持部材と、前記棒体を保持してこれを押し込み方向と引き出し方向へ移動させる棒体駆動手段と、絞り具の収容穴内に布材を押し込んだ状態で前記棒体が引き出された時に当該棒体と一体に前記凹所から引き出される前記絞り具を、前記棒体の先端方向へ押しやって、絞り具を布材と共に前記棒体から離脱させる絞り具離脱手段とを備える絞り具の装着装置。
【請求項2】
前記絞り具離脱手段は、前記棒体が挿通され当該棒体よりもやや大きいしごき穴を設けた操作部材と、当該操作部材を棒体に沿って先端方向へ移動させる駆動手段を備えている請求項1に記載の絞り具の装着装置。
【請求項3】
前記絞り具保持部材に前記凹所を複数設けてそれぞれの凹所内に前記絞り具を挿置し、当該絞り具が一の凹所から引き出された後に、前記絞り具が挿置された他の凹所が前記棒体と対向する位置に至るように前記絞り具保持部材を移動させる移動駆動手段を設けた請求項1に記載の絞り具の装着装置。
【請求項4】
前記移動駆動手段は可動部材を備えており、前記絞り具保持部材は可動部材に着脱可能に設けられている請求項3に記載の絞り具の装着装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−36125(P2013−36125A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−171451(P2011−171451)
【出願日】平成23年8月5日(2011.8.5)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 日本機械学会ロボティクス・メカトロニクス会議 講演集 平成23年5月26日発行
【出願人】(391002487)学校法人大同学園 (23)
【出願人】(511191989)有限会社名南機械製作所 (1)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月5日(2011.8.5)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 日本機械学会ロボティクス・メカトロニクス会議 講演集 平成23年5月26日発行
【出願人】(391002487)学校法人大同学園 (23)
【出願人】(511191989)有限会社名南機械製作所 (1)
【Fターム(参考)】
[ Back to top ]