
給水装置の始動方法および給水装置
【課題】学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法を提供する。
【解決手段】給水装置は、ポンプ14と、ポンプ14を駆動するモータ16と、モータ16の回転周波数を制御するインバータ18と、ポンプ14の吐出側の圧力を検知する圧力センサ34と、内部メモリ48とを備える。圧力センサ34の検出圧力が予め設定された圧力以下になった日の曜日および時刻を内部メモリ48に記憶させ、ポンプ14を次週の同曜日同時刻の数分前から所定の時間だけ強制的に運転させる。
【解決手段】給水装置は、ポンプ14と、ポンプ14を駆動するモータ16と、モータ16の回転周波数を制御するインバータ18と、ポンプ14の吐出側の圧力を検知する圧力センサ34と、内部メモリ48とを備える。圧力センサ34の検出圧力が予め設定された圧力以下になった日の曜日および時刻を内部メモリ48に記憶させ、ポンプ14を次週の同曜日同時刻の数分前から所定の時間だけ強制的に運転させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、給水装置の始動方法および給水装置に係り、特に学校などの施設における給水のために設置される給水装置の始動方法および給水装置に関するものである。
【背景技術】
【0002】
水道本管(配水管)からの水を受水槽を介さずに直接に加圧ポンプ(ブースタポンプ)で加圧し、末端給水機器(需要先)へ給水する直結型給水装置が従来から用いられている。このような従来の直結型給水装置は、比較的高層の集合住宅やビルなど、大型のポンプによるブーストアップが不可欠な大規模な建物を対象としており、このような建物においては、ポンプの異常停止が断水に直結するため、ポンプを複数台備えてバックアップ機能を持たせることが必要不可欠である。このため、従来の給水装置は、複数台のポンプを備えており、運転中に特定のポンプや速度制御用のインバータの異常が検知された場合には、他の正常なポンプやインバータに運転を切替えて給水を継続するようになっている。
【0003】
例えば、学校などの施設でトイレ洗浄用のフラッシュバルブを一斉に使用した場合、瞬間的に大量の水が流れるため、ポンプによる給水が不足する場合がある。このため、上述した複数台のポンプを順次追加しながら給水装置を起動し、使用水量の急激な増大に対応している。しかしながら、従来の給水装置の始動方法では、ポンプの追加が必要水量に間に合わず、追加の遅れにより急激な圧力低下が生じ、正常な給水圧力まで回復するのに時間を要することがあった。したがって、このような給水装置の始動時の給水圧力不足を解消する方法が要望されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、このような従来技術の問題点に鑑みてなされたもので、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法および給水装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明の一態様は、ポンプと、前記ポンプを駆動するモータと、前記モータの回転周波数を制御するインバータと、前記ポンプの吐出側の圧力を検知する圧力センサと、内部メモリとを備えた給水装置の始動方法であって、前記圧力センサの検出圧力が予め設定された圧力以下になった日の曜日および時刻を前記内部メモリに記憶させ、前記ポンプを次週の同曜日同時刻の数分前から所定の時間だけ強制的に運転させることを特徴とする。
【0006】
本発明の好ましい態様は、前記ポンプの強制運転中に圧力変動が生じなかった場合は、前記ポンプをその次の週の同曜日同時刻に通常運転させることを特徴とする。
本発明の好ましい態様は、前記ポンプ、前記モータ、及び前記インバータは、それぞれ複数台のポンプ、複数台のモータ、及び複数台のインバータであり、前記複数台のインバータは前記複数台のモータにそれぞれ接続されており、前記複数台のポンプを同一速度で起動させることを特徴とする。
本発明の好ましい態様は、前記ポンプは複数台のポンプであり、該複数台のポンプは、前記インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを含み、前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする。
【0007】
本発明の他の態様は、インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを備えた給水装置の始動方法であって、前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする。
【0008】
本発明のさらに他の態様は、ポンプと、前記ポンプを駆動するモータと、前記モータの回転周波数を制御するインバータと、前記ポンプの吐出側の圧力を検知する圧力センサと、前記圧力センサの検出圧力が予め設定された圧力以下になった日の曜日および時刻を記憶する内部メモリとを備え、前記ポンプは次週の同曜日同時刻の数分前から所定の時間だけ強制的に運転されることを特徴とする給水装置である。
【0009】
本発明の好ましい態様は、前記ポンプの強制運転中に圧力変動が生じなかった場合は、前記ポンプはその次の週の同曜日同時刻に通常運転されることを特徴とする。
本発明の好ましい態様は、前記ポンプ、前記モータ、及び前記インバータは、それぞれ複数台のポンプ、複数台のモータ、及び複数台のインバータであり、前記複数台のインバータは前記複数台のモータにそれぞれ接続されており、前記複数台のポンプは同一速度で起動されることを特徴とする。
本発明の好ましい態様は、前記ポンプは複数台のポンプであり、該複数台のポンプは、前記インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを含み、前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする。
【0010】
本発明のさらに他の態様は、インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを備えた給水装置であって、前記第2のポンプは前記第1のポンプよりも先に駆動され、その後、所定時間経過後に前記第1のポンプが駆動されることを特徴とする。
【0011】
本発明の一参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法が提供される。この方法によれば、検出圧力が所定の停止圧力から所定の始動圧力以下になったときに給水装置が始動される。上記検出圧力が上記所定の停止圧力から上記所定の始動圧力に変化する過程において、所定の基準時刻における上記検出圧力が所定の基準値よりも低い場合に、次回の始動時の始動圧力が上げられる。この場合において、上記所定の基準値は、上記停止時圧力と上記始動圧力との中間値とすることができる。
【0012】
本発明の他の参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法が提供される。この方法によれば、検出圧力が所定の停止圧力から所定の始動圧力以下になったときに給水装置が始動される。上記検出圧力が上記所定の停止圧力から上記所定の始動圧力に変化する過程において、所定の基準値の圧力が検出される時刻が所定の基準時刻よりも早い場合に、次回の始動時の始動圧力が上げられる。この場合において、上記所定の基準値は、上記停止時圧力と上記始動圧力との中間値とすることができる。
【0013】
本発明のさらに他の参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法が提供される。この方法によれば、複数のポンプのモータが同一周波数で起動される(揃速起動工程)。同一周波数で運転されているn台のモータの運転周波数と目標圧力の下限値に対応する下限周波数との差が、上記モータの最大運転周波数と上記下限周波数との差の(n−1)/n以下であるか否かが判断される(周波数判断工程)。上記周波数判断工程において(n−1)/n以下であると判断された場合に、運転されているポンプのうちの1台が停止された後、上記周波数判断工程が繰り返される(反覆工程)。上記周波数判断工程において(n−1)/n以下ではないと判断された場合に、少なくとも1つのポンプのモータの周波数を固定するとともに、他のポンプのモータの周波数を変化させる(運転移行工程)。この場合において、運転されているポンプが1台になるまで上記反覆工程を繰り返すことが好ましい。
【0014】
本発明のさらに他の参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法が提供される。この方法によれば、検出圧力が所定の停止圧力から所定の始動圧力以下になったときに給水装置が始動される。上記検出圧力が上記所定の停止圧力から上記所定の始動圧力に変化する過程において、所定の期間における上記検出圧力の低下が上記停止時圧力と上記始動圧力との差に対する所定の割合より大きい場合に、次回の始動時の始動圧力が上げられる。
【0015】
本発明のさらに他の参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法が提供される。この方法によれば、複数のポンプのモータを同一周波数で起動される(揃速起動工程)。同一周波数で運転されている複数台のモータの運転周波数に基づいて、運転されている複数台のポンプのうち一部を停止してもよいかが判断される(周波数判断工程)。上記周波数判断工程において停止してもよいと判断された場合に、運転されているポンプの一部が停止される(停止工程)。この場合において、上記周波数判断工程において停止する必要がないと判断された場合には、少なくとも1つのポンプのモータの周波数が固定される(運転移行工程)ことが望ましい。
【0016】
本発明のさらに他の参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置が提供される。この給水装置は、複数のポンプと、上記複数のポンプを駆動するモータと、上記ポンプの吐出側の圧力が所定の圧力に維持されるように上記モータの速度を制御する制御部とを備えている。上記制御部は、次のように上記モータを制御する。複数のポンプのモータを同一周波数で起動する(揃速起動工程)。同一周波数で運転されているn台のモータの運転周波数と目標圧力の下限値に対応する下限周波数との差が、上記モータの最大運転周波数と上記下限周波数との差の(n−1)/n以下であるか否かを判断する(周波数判断工程)。上記周波数判断工程において(n−1)/n以下であると判断された場合に、運転されているポンプのうちの1台を停止した後、上記周波数判断工程を繰り返す(反覆工程)。上記周波数判断工程において(n−1)/n以下ではないと判断された場合に、少なくとも1つのポンプのモータの周波数を固定するとともに、他のポンプのモータの周波数を変化させる(運転移行工程)。
【発明の効果】
【0017】
本発明に係る給水装置の始動方法および給水装置によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態における給水装置を示す模式図である。
【図2】図1に示す給水装置におけるポンプの運転特性曲線を示すグラフである。
【図3】図1に示す給水装置の始動時の圧力変化の一例を示すグラフである。
【図4】図1に示す給水装置の始動時の圧力変化の他の例を示すグラフである。
【図5】本発明の他の実施形態における給水装置を示す模式図である。
【図6】図1に示す給水装置の構造の一例を示す正面図である。
【図7】図6の平面図である。
【図8】図1に示す給水装置の構造の他の例を示す正面図である。
【図9】図8の平面図である。
【図10】本発明の他の実施形態における給水装置の始動方法を示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明に係る給水装置の実施形態について図1から図10を参照して詳細に説明する。なお、図1から図10において、同一または相当する構成要素には、同一の符号を付して重複した説明を省略する。
【0020】
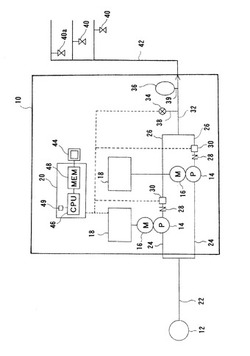
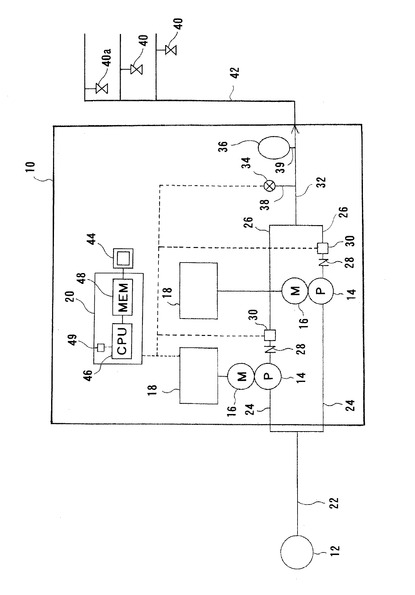
図1は、本発明の一実施形態における給水装置10を示す模式図である。図1に示すように、給水装置10は、水道本管12に接続される複数台のポンプ14と、ポンプ14を駆動するモータ16と、モータ16の回転周波数を制御するインバータ18と、インバータ18をはじめとする各種機器を制御する制御部20とを備えている。モータ16は制御部20に接続されており、例えば、モータ16に設けた光学式または磁気式のロータリーエンコーダからの出力信号によりモータ16またはポンプ14の回転速度が制御部20でモニタされるようになっている。ここでは、複数台のポンプ14を備えた給水装置について説明するが、ポンプが1台の場合もあり得る。
【0021】
給水装置10のポンプ14は、水道本管12から延びる上流給水管22に吸込管24を介してそれぞれ接続され、ポンプ14の吐出側には吐出管26が接続されている。各吐出管26には、ポンプ14が停止した場合に吐出側から吸込側に水が逆流することを防止し、吐出管26内の圧力を維持するための逆止弁28と、吐出管26内の水量が少なくなったことを検出するフロースイッチ30とが設けられている。このフロースイッチ30は、ポンプ14から吐出管26に吐出される水量が設定量Qminよりも少なくなると動作し、過少水量検出信号を発する。フロースイッチ30は制御部20に接続されており、フロースイッチ30の出力信号により吐出管26内の過少水量が制御部20でモニタされるようになっている。なお、フロースイッチ30を垂直吐出管に配置する場合には、垂直吐出管をモータ16の軸方向と同一の方向に配置すれば、ポンプ14からの吐き出し流体による流れの影響を避けることができ、安定した検知が可能となる。
【0022】
図1に示すように、それぞれのポンプ14からの吐出管26は1本の合流管32に合流されており、この合流管32には、合流管32の圧力を検知する圧力センサ34と、合流管32中の水を蓄えておく圧力タンク36とが、それぞれ枝管38,39を介して取り付けられている。圧力センサ34は制御部20に接続されており、圧力センサ34の出力信号により合流管32(吐出管26)内の水圧が制御部20でモニタされるようになっている。
【0023】
給水装置10の合流管32は、ビルやマンションなどの建物内の需要家の給水末端40に延びる下流給水管42に接続されており、上述した給水装置10により水道本管12の水が需要家に供給されるようになっている。これらの給水末端40は、例えば、分岐した下流給水管42のそれぞれに設けられる給湯器や給水栓、トイレ洗浄用のフラッシュバルブなどである。
【0024】
ここで、図1に示すように、制御部20には、液晶画面等の表示部と数値入力用のテンキーまたは増減ボタンとを有する入力パネル44が取り付けられている。この入力パネル44を介して、操作者は、目標圧力の上限値(上限圧力)PUや下限値(下限圧力)PL、過少水量時の停止圧力P0、上限圧力PUと下限圧力PLとの差圧PD、その他制御に必要な情報を入力できるようになっている。例えば、入力パネル44の液晶画面のタッチパネルやボタンを押すことにより上記制御に必要な情報を入力できるようになっている。また、上限圧力PUおよび下限圧力PLは、例えば、ポンプ14を設置するときの条件、すなわち、給水を行う建物の高さや、給水栓までの配管の長さ、配管抵抗、保証すべき吐出管内の圧力などを考慮して、入力パネル44を介して設定および変更できるようになっている。
【0025】
図1に示すように、制御部20は、中央演算処理装置(CPU)46と内部メモリ48とタイマ49とを備えており、入力パネル44から入力された情報は、CPU46を介して内部メモリ48に記憶される。制御部20の内部では、モータ16のゲート制御信号が演算され、このゲート制御信号がインバータ18に送られてインバータ18内部のゲートトランジスタが駆動される。インバータ18は、電気的に接続されたモータ16に速度制御信号を送り、所定の回転速度でポンプ14を駆動させる。なお、ポンプ14の駆動にあたっては、例えば、パルス幅変調(PWM)やパルス振幅変調(PAM)により交流電圧を無段階に制御することにより、効率良く高速でポンプ14を運転することができる。
【0026】
制御部20は、入力パネル44から入力された情報および圧力センサ34からの出力信号等に基づいて、インバータ18を介してポンプ14の回転速度(回転周波数)を可変速制御する。すなわち、制御部20は、インバータ18を制御して所定の交流電圧もしくは直流電圧をモータ16に印加し、モータ16を増減速させる。モータ16の回転が高速になるのに伴って、ポンプ14の吐出量が増大する。このとき、吐出管26内の水圧は上昇するが、この圧力は圧力センサ34により逐次検出されており、制御部20は、圧力センサ34により検出される圧力が目標圧力に一致するように、ポンプ14の回転速度をフィードバック制御する。
【0027】
ここで、需要家の給水末端40において水が使用され、圧力センサ34により検出される検出圧力が予め設定された始動圧力P1以下に低下すると、給水装置10のポンプ14が始動される。ポンプ14がモータ16により駆動されると、水道本管12の水が吸込管24を介してポンプ14に吸い込まれ、所定の圧力で吐出管26に吐出される。吐出管26に吐出された水は、合流管32および下流給水管42を通って需要側の給水末端40に給水される。ポンプ14により揚水される水は、中層住宅や高層住宅、商業用ビルなどの最も高い位置に設けられる給水末端40aにも十分給水できる圧力に加圧される。
【0028】
ポンプ14の運転中に、給水末端40における水の使用量が少なくなり、水量が設定量Qminよりも少なくなってフロースイッチ30が動作すると、ポンプ14の運転が停止される。このポンプ14の停止にあたっては、一時的にポンプ14の運転速度を上げて吐出圧力を上げることによって、圧力タンク36内に十分な水を蓄圧する。最終的には、圧力タンク36内の水が所定の停止圧力P0に昇圧された状態で給水装置10が停止される。
【0029】
その後、給水末端40において水が使用されると、しばらくは圧力タンク36から水が供給されるが、圧力タンク36の水が少なくなり、圧力センサ34の検出圧力が上述した始動圧力P1以下に低下すると、ポンプ14が再び起動される。
【0030】
なお、ポンプ14の始動開始後一定の時間においては、フロースイッチ30からの過少水量検出信号をキャンセルするようにしてもよい。このようにすることで、給水設備の諸条件により、ポンプ14が始動してからしばらくの間は水が流れないような場合であっても、過少水量の検出によってポンプ14が停止されることを防止することができる。また、ポンプ14の吐出圧力が所定の値よりも低い場合には、フロースイッチ30から過少水量検知信号が送られてもポンプ14の停止処理を行わないように制御部20をプログラムしてもよい。このようにすることで、ポンプ14の運転中の吐出圧力を常に所定の値よりも低くならないようにすることができ、過少水量による停止処理の頻度を低くすることができる。
【0031】
ここで、上述したように、制御部20は、圧力センサ34により検出された圧力が目標圧力に一致するように、ポンプ14の回転速度を制御するが、このときの制御としては、ポンプ14の吐出圧力が一定になるようにポンプ14の回転速度を制御する吐出圧力一定制御や、配管の末端圧力が一定となるようにポンプ14の吐出圧力の目標値を逐次演算し、この目標値にポンプ14の吐出圧力が一致するようにポンプ14の回転速度を制御する推定末端圧力一定制御などがなされる。これらの制御方法のうち、推定末端圧力一定制御について説明する。
【0032】
推定末端圧力は、最高所および/または最長配管の末端40aにおける圧力を推定したものであり、この末端40aがポンプ14の目標吐出圧力を支配する。この末端における圧力を一定にするようなポンプ14の吐出圧力が目標圧力として演算され、ポンプ14の吐出圧力が目標圧力となるようにポンプ14の回転速度が制御される。
【0033】
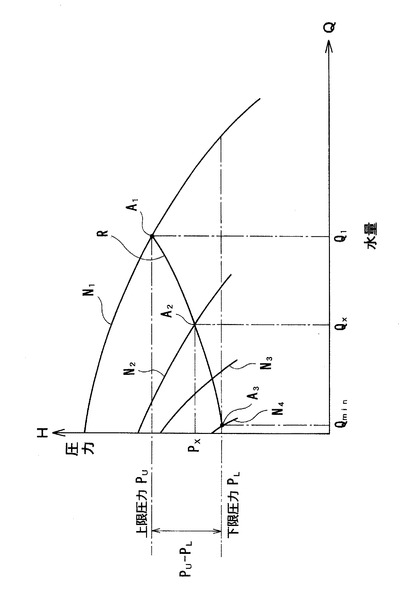
図2は、ポンプ14の運転特性曲線を示すものであり、横軸が水量、縦軸が圧力(ヘッドまたは揚程)を表している。曲線N1〜N4は、各回転速度におけるポンプ14の運転特性を示しており、N1は、ポンプ14の最高回転速度における特性曲線である。ここで、抵抗曲線Rは、ポンプ14から給水末端40までの使用水量に応じた管路損失であり、水量が0の点を原点として使用水量Qの略二乗に比例する曲線となっている。
【0034】
推定末端圧力一定制御においては、使用水量に応じた(抵抗曲線Rで示される)管路損失を見込んだ制御がなされるため、抵抗曲線Rに沿って目標圧力が逐次演算される。この演算された目標圧力は制御部20の内部メモリ48に一時的に記憶される。制御部20は、ポンプ14の吐出圧力が、演算された目標圧力となるようにポンプ14の回転速度を制御する。
【0035】
図2において、最高回転速度における運転点は点A1であり、この点A1における圧力は上限圧力PU、水量はQ1となっている。ポンプ14の回転速度を下げることにより、運転点は、点A1から点A2、点A3を通る抵抗曲線R上を移動する。例えば、図2に示すように、水量Qxのときの目標圧力Pxが抵抗曲線Rに沿って演算され、ポンプ14の吐出圧力がこの目標圧力Pxになるようにポンプ14の回転速度が設定される。
【0036】
水量が設定量Qminよりも少なくなってフロースイッチ30が動作すると、ポンプ14の停止処理が開始される。このポンプ停止処理においては、ポンプ14の吐出圧力の目標値を上述した抵抗曲線Rに沿った目標圧力から、予め設定された停止圧力P0に一時的に変更する。これにより、ポンプ14の回転速度が上げられ、最終的にはポンプ14の吐出圧力は停止圧力P0に達し、ポンプ14が停止される。なお、フロースイッチ30が動作した後、過少水量の状態が一定時間継続してはじめてポンプ14の停止処理を開始することが好ましい。この過少水量の状態の継続時間は、例えば、直前のポンプ14の運転状態により逐次変化させることができる。このようにすることで、ポンプ14の停止処理およびそれに続くポンプ14の起動処理の頻度を減らし、装置の耐久性の向上および長寿命化を図ることができる。
【0037】
制御部20は、内部メモリ48に記憶された上限圧力PUおよび下限圧力PLに基づいて上記停止圧力P0を演算できるようになっている。例えば、停止圧力P0が上限圧力PUまたはこれ以上の値となるように演算される。また、制御部20は、ポンプ14の始動圧力P1も演算できるようになっており、例えば、下限圧力PLと同等の圧力または下限圧力PLより若干低い圧力となるように始動圧力P1が演算される。
【0038】
また、下限圧力PLを入力された上限圧力PUから演算してもよい。例えば、給水末端40の最高位置がビルの5階である場合には、上限圧力PUを14mとし、上限圧力PUから約15%低い12mを下限圧力PLとしてもよい。このように、下限圧力PLを上限圧力PUよりも約15%低く設定するのは、配管抵抗分がおよそ15%程度と見積もられるからである。
【0039】
例えば、上述した制御部20の入力パネル44を介して上限圧力PUと割合D%とを入力し、下限圧力PLをPL=PU−(PU×D%)により求めてもよい。あるいは、上限圧力PUと差圧PDとを入力し、下限圧力PLをPL=PU−PDにより求めてもよい。なお、上限圧力PUと下限圧力PLとを同一の値に設定すれば、吐出圧力一定制御を行うことができる。この場合には、停止圧力P0はPU(=PL)となり、始動圧力はPU−PDとなるため、ポンプ14による過剰な加圧は行われない。
【0040】
ここで、上述した給水装置10が例えば学校などの施設における給水のために設置されている場合、休み時間などにトイレ洗浄用のフラッシュバルブが同時に使用されることにより給水不足が生じる場合がある。本実施形態では、このような給水不足を解消するために、以下に述べるような方法により給水装置10を始動する。
【0041】
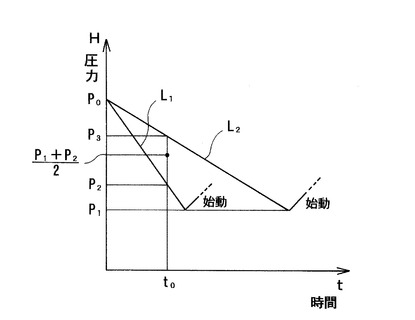
上述したように、給水末端40で水が使用され、圧力センサ34の検出圧力が停止圧力P0から低下し、始動圧力P1になると給水装置10が始動される。このとき、圧力低下が始まってから所定の時刻における圧力センサ34の検出圧力を内部メモリ48に記憶し、この値と基準値、例えば停止圧力P0と始動圧力P1との中間値((P0+P1)/2))とを比較する。検出圧力が基準値よりも低いということは、急激な圧力低下が生じていることを示しているため、このことを内部メモリ48に記憶しておく。例えば、図3のグラフL1に示すように、圧力低下が始まってから所定の時刻t0における検出圧力P2が停止圧力P0と始動圧力P1との中間値((P0+P1)/2))よりも低い場合には、内部メモリ48には急激な圧力低下が生じていることが記憶される。一方、グラフL2に示すように、所定の時刻t0における検出圧力P3が停止圧力P0と始動圧力P1との中間値((P0+P1)/2))よりも高い場合には、通常の圧力低下として扱われる。
【0042】
急激な圧力低下が内部メモリ48に記憶された場合には、次回給水装置10が始動されるときの始動圧力をP1よりも高く設定することによって、早めにポンプ14が起動されるようにする。このようにすれば、次回給水装置10が始動されるときには、ポンプ14が通常よりも早めに起動されるので、大量の水の同時使用に対しても十分な給水を行うことができる。
【0043】
例えば、上限圧力PUと下限圧力PLとの差が5m以上ある場合は、始動圧力を上限圧力PUと下限圧力PLとの中間値((PU+PL)/2))に設定することができる。上限圧力PUと下限圧力PLとの差が5mより小さい場合は、始動圧力を上限圧力PUから2.5m低い値(PU−2.5)に設定することができる。なお、通常の圧力低下として扱われる場合には、例えば、上限圧力PUと下限圧力PLとの差が5m以上ある場合は、始動圧力をPLとし、上限圧力PUと下限圧力PLとの差が5mより小さい場合は、始動圧力を上限圧力PUから5m低い値(PU−5)に設定することができる。
【0044】
上述の例では、所定の時刻t0における検出圧力に基づいて急激な圧力低下を判断しているが、検出圧力が所定の基準値になったときの時刻に基づいて判断することもできる。すなわち、図3のグラフにおいて、圧力センサ34の検出圧力が停止圧力P0と始動圧力P1との中間値((P0+P1)/2))になるときの時刻が、所定の時刻t0よりも早い場合には急激な圧力低下が生じていると判断し、所定の時刻t0よりも遅い場合には通常の圧力低下であると判断することができる。
【0045】
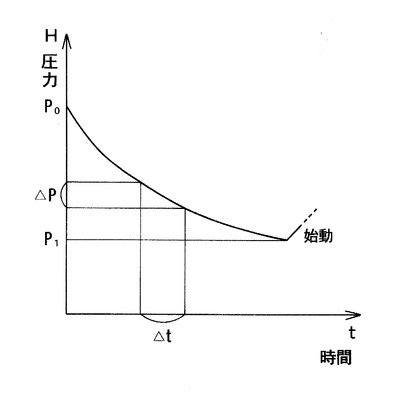
また、図4に示すように、給水装置10の始動時に、圧力センサ34の検出圧力が停止圧力P0から始動圧力P1に変化する過程において、任意の期間Δtにおける検出圧力の低下ΔPが、停止時圧力P0と始動圧力P1との差(P0−P1)に対する所定の割合より大きい場合に、次回の始動時の始動圧力を上げることとしてもよい。
【0046】
このような方法により、トイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる。また、この方法以外に、給水圧力不足を解消するために以下のような方法を行うこともできる。
【0047】
例えば、制御部20に内蔵されたタイマ49に日時認識機能(時計機能)を設け、トイレ洗浄用のフラッシュバルブの同時使用などにより大量の水が一時的に使用され、圧力センサ34の検出圧力が予め設定された圧力以下になった場合、その日の曜日および時刻を内部メモリ48に記憶しておく。学校などにおいては、次週の同曜日同時刻には同じように給水不足が生じると考えられるため、次週の同曜日同時刻の数分前になると、圧力センサ34の検出圧力に関係なく、ポンプ14を所定の時間だけ強制的に運転させてもよい。このような方法によっても、急激な圧力低下による始動時の給水圧力不足を解消することができる。
【0048】
この場合において、ポンプ14の強制運転中に、実際に大量の水が使用され、圧力変動が生じた場合には、その次の週の同曜日同時刻についても同様の強制運転を行い、圧力変動が生じなかった場合には、その次の週の同曜日同時刻には、ポンプ14の強制運転を行わず通常の運転を行うこととしてもよい。
【0049】
また、通常、ポンプ14を起動するときには、圧力センサ34の検出圧力からモータ16の運転周波数が決定され、決定された周波数にてポンプ14が起動される。このため、水量が多い状態でポンプ14が起動されると、インバータ18によるポンプ起動のタイムラグが生じ、圧力低下が生じる場合がある。これを解消するため、まず、給水装置10の始動時には、演算された目標圧力に関係なく、ポンプ14を最大運転周波数で起動し、その後、所定時間経過後に推定末端圧力一定制御または吐出圧力一定制御に移行させてもよい。この場合において、ポンプ14の周波数を起動時に最大運転周波数まで上げるときに、周波数の時間変化がグラフ上でS字を描くように周波数を変化させるS字加速運転を行ってもよいし、最大運転周波数になるまでの時間を通常時よりも短く設定してもよい。
【0050】
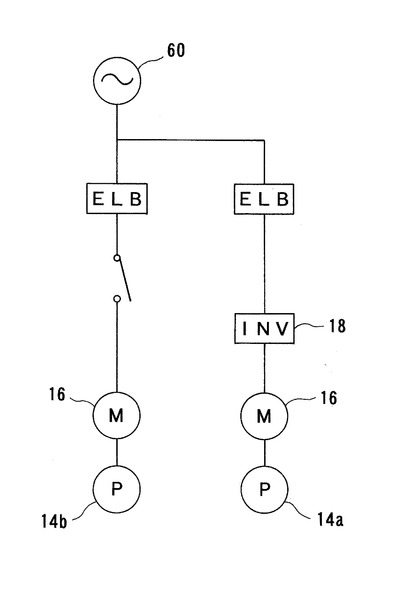
また、図5に示すように、給水装置が、インバータ18により制御されるモータ16により駆動されるポンプ14aと、商用電源60に直接接続されたモータ16により駆動されるポンプ14bとから構成される場合は、通常、省エネルギーのため先にインバータ18付のポンプ14aが駆動され、その後水量が足らなくなったときに商用電源60に直結されたポンプ14bが駆動される。しかしながら、上述したようにインバータ18付のポンプ14aでは起動時にタイムラグが生じるため、急激な圧力低下が生じた場合には給水圧力不足が生じる可能性がある。このような給水圧力不足を解消するため、給水装置の始動時には、先に商用電源60に直結されたポンプ14bを駆動し、瞬時にポンプ14bを起動させ、その後、所定時間経過後にインバータ18付のポンプ14aを駆動することとしてもよい。
【0051】
また、給水末端40aがトイレ等である場合には、人が便座に座ったり、便器の前に立ったりする動作に反応する人感センサをトイレに設置し、この人感センサが作動したときに、実際の水の使用状況に関係なく、所定時間ポンプを強制的に起動させることとしてもよい。
【0052】
図6は図1に示す給水装置10の構造の一例を示す正面図、図7は図6の平面図である。図6および図7に示すように、給水装置10は、ベース50上に設置された2台のポンプ14と、それぞれのポンプ14を駆動する2台のモータ16と、各モータ16の回転速度を制御する制御部20とを備えている。
【0053】
各ポンプ14には、上流給水管からの水を吸い込む吸込管24と、加圧した水を吐出する吐出管26とが取り付けられている。各吐出管26には、吐出管26の水量が所定の量よりも少なくなったことを検出するフロースイッチ30が設けられている。また、これらの吐出管26は合流管32に合流されている。2台のポンプ14の間には、圧力タンク36がベース50上に設置されており、この圧力タンク36は合流管32に接続されている。また、合流管32には、吐出される水の圧力を検出する圧力センサ34が設けられている。
【0054】
このような構成の給水装置10において、吸込管24から吸い込まれた水は、ポンプ14により加圧された後、合流管32を通って吐出口52から吐出され、下流給水管を介して給水端末に供給される。ここで、ポンプ14の吐出側の圧力が所定の目標圧力になるように、各モータ16の回転速度が可変制御される。
【0055】
なお、給水装置10の全体の振動を防止するために、ベース50の任意の位置に切欠き孔(図示せず)を形成することが好ましい。このような切欠き孔を振動の共振点に形成することにより、防振効果を得ることができ。また、ベース50にリブ(図示せず)を設けることで、より一層の防振効果を得ることができる。切欠き孔の形状は、別の共振点が生じるような角部を有していなければ、どのようなものであってもよい。例えば、円形や楕円形の切欠き孔を設けることができる。
【0056】
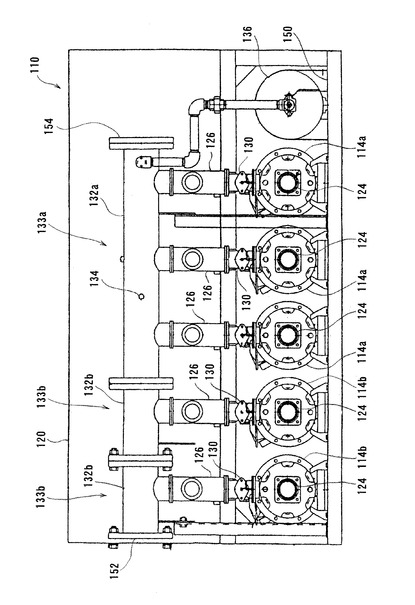
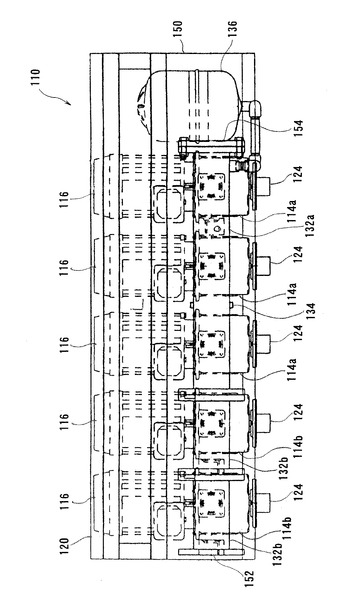
上述の例では、2台のポンプ14を備えた給水装置10について説明したが、ポンプ14の台数は2台に限られるものではない。図8および図9は、5台のポンプを備えた給水装置110の例であり、図8は正面図、図9は平面図である。図8および図9に示すように、給水装置110は、ベース150上に設置された5台のポンプ114a,114bと、それぞれのポンプを駆動するモータ116と、各モータ116の回転速度を制御する制御部120とを備えている。
【0057】
各ポンプ114a,114bには、上流給水管からの水を吸い込む吸込管124と、加圧した水を吐出する吐出管126とが取り付けられている。各吐出管126には、吐出管126の水量が所定の量よりも少なくなったことを検出するフロースイッチ130が設けられている。
【0058】
図8および図9に示す給水装置110は、3台のポンプ114aの吐出管126に接続される第1の合流管132aに、ポンプ114bの吐出管126に接続される第2の合流管132bを2つ接続した構造となっている。このように、3台のポンプ114aから構成されるベースユニット133aに、1台のポンプ114bから構成される付加ユニット133bをポンプ114aの並び方向に任意の数だけ接続することで、ユーザの要求に応じたポンプ台数の給水装置を簡単に構成することができる。
【0059】
また、第1の合流管132aには、吐出される水の圧力を検出する圧力センサ134が設けられている。ベース150上には、圧力タンク136が設置されており、この圧力タンク136は第1の合流管132aに接続されている。このように、制御部120の下部に圧力タンク136をポンプ114a,114bと並列に設置することにより、圧力タンク136のメンテナンス時および交換時に圧力タンク136内の水が制御部120にかかることが防止される。
【0060】
この例では、第1の合流管132aの端部には、ブラインドフランジ154を取り付けられており、反対側の第2の合流管132bの端部に吐出口152が形成されている。なお、第2の合流管132bの端部にブラインドフランジ154を取り付け、第1の合流管132aの端部に吐出口152を形成してもよい。
【0061】
このような構成の給水装置110において、吸込管124から吸い込まれた水は、ポンプ114a,114bにより加圧された後、各合流管132a,132bを通って吐出口152から吐出され、下流給水管を介して給水端末に供給される。ここで、ポンプ14の吐出側の圧力が所定の目標圧力になるように、各モータ116の回転速度が可変制御される。
【0062】
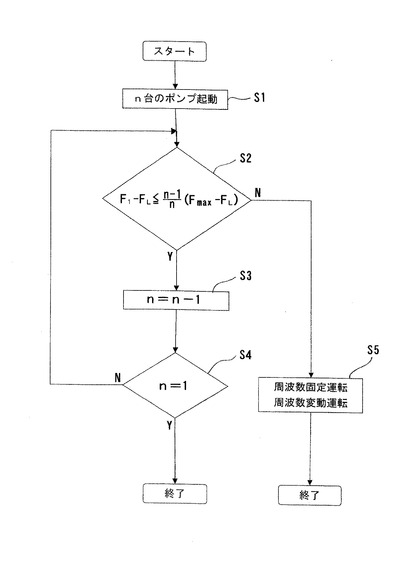
図8および図9に示す給水装置110のように、多数のポンプを備えている場合には、上述した急激な圧力低下に対して、図10に示すフローチャートのような方法により対応することもできる。すなわち、給水装置110の始動時に、複数台のポンプ、例えば5台のポンプ114a,114b(以下、ポンプ114aと114bをまとめて符号114で表す)を同時に起動する。このとき、すべてのポンプ114を同一速度(同一周波数)で運転する(揃速起動工程S1)。このように、給水装置110の始動時に複数のポンプ114を同時に起動することにより、急激な圧力低下による始動時の給水圧力不足を解消することができる。
【0063】
給水装置110の始動後、所定の時間が経過したときに、モータ116の運転周波数F1と上述した下限圧力PLに対応するモータ116の周波数FLとの差(F1−FL)が、モータ116の運転最大周波数Fmaxと下限周波数FLとの差(Fmax−FL)の(n−1)/n以下であるか否かを判断する(周波数判断工程S2)。ここで、nは、運転しているポンプ114の台数である。
【0064】
周波数判断工程S2においてF1−FLがFmax−FLの(n−1)/n以下となっている場合には、運転しているn台のポンプ114のうち1台を停止させる(停止工程(解列動作S3)。このとき、運転しているポンプ114が1台になったかどうかが判断され(台数判断工程S4)、1台になったときは、通常のポンプ1台の運転に切り替わる。運転しているポンプ114が複数台ある場合は、上述した周波数判断工程S2に戻り、ポンプ1台になるまで上述した処理が繰り返される(反覆工程)。つまり、ポンプの運転台数を減らしても現在の目標圧力を保つことができるかどうかという判断を、周波数FLに基づいて行うことで、適正なポンプの運転台数まで減らすことができる。なお、本実施形態では周波数判断工程S2においてはポンプ1台を停止してよいかについて判断しているが、3台以上のポンプが運転されている場合には、複数台のポンプを停止してよいかの判断を行うようにしてもよい。
【0065】
周波数判断工程S2においてF1−FLがFmax−FLの(n−1)/n以下となっていなかった場合には、少なくとも1つのポンプ114のモータ116の周波数を固定するとともに、他のポンプ114のモータ116の周波数を変化させる(運転移行工程S5)。
【0066】
このように、図10に示す例によれば、給水装置110の始動時に複数のポンプ114を同時に起動しているので、急激な圧力低下による始動時の給水圧力不足を解消することができる。
【0067】
なお、上述の実施形態においては、給水装置が水道本管に直接接続される場合について説明したが、これに限られるものではなく、例えば、給水装置の上流に水道水をいったん貯留する受水槽を設置し、この受水槽に貯留された水を給水装置により各需要家に供給することとしてもよい。
【0068】
これまで本発明の一実施形態について説明したが、本発明は上述の実施形態に限定されず、その技術的思想の範囲内において種々異なる形態にて実施されてよいことは言うまでもない。
【符号の説明】
【0069】
10,110 給水装置
12 水道本管
14,114a,114b ポンプ
16,116 モータ
18 インバータ
20 制御部
22 上流給水管
24,124 吸込管
26,126 吐出管
28 逆止弁
30,130 フロースイッチ
32,132a,132b 合流管
34,134 圧力センサ
36,136 圧力タンク
38,39 枝管
40 給水末端
42 下流給水管
44 入力パネル
46 CPU
48 内部メモリ
49 タイマ
50,150 ベース
52,152 吐出口
【技術分野】
【0001】
本発明は、給水装置の始動方法および給水装置に係り、特に学校などの施設における給水のために設置される給水装置の始動方法および給水装置に関するものである。
【背景技術】
【0002】
水道本管(配水管)からの水を受水槽を介さずに直接に加圧ポンプ(ブースタポンプ)で加圧し、末端給水機器(需要先)へ給水する直結型給水装置が従来から用いられている。このような従来の直結型給水装置は、比較的高層の集合住宅やビルなど、大型のポンプによるブーストアップが不可欠な大規模な建物を対象としており、このような建物においては、ポンプの異常停止が断水に直結するため、ポンプを複数台備えてバックアップ機能を持たせることが必要不可欠である。このため、従来の給水装置は、複数台のポンプを備えており、運転中に特定のポンプや速度制御用のインバータの異常が検知された場合には、他の正常なポンプやインバータに運転を切替えて給水を継続するようになっている。
【0003】
例えば、学校などの施設でトイレ洗浄用のフラッシュバルブを一斉に使用した場合、瞬間的に大量の水が流れるため、ポンプによる給水が不足する場合がある。このため、上述した複数台のポンプを順次追加しながら給水装置を起動し、使用水量の急激な増大に対応している。しかしながら、従来の給水装置の始動方法では、ポンプの追加が必要水量に間に合わず、追加の遅れにより急激な圧力低下が生じ、正常な給水圧力まで回復するのに時間を要することがあった。したがって、このような給水装置の始動時の給水圧力不足を解消する方法が要望されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、このような従来技術の問題点に鑑みてなされたもので、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法および給水装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明の一態様は、ポンプと、前記ポンプを駆動するモータと、前記モータの回転周波数を制御するインバータと、前記ポンプの吐出側の圧力を検知する圧力センサと、内部メモリとを備えた給水装置の始動方法であって、前記圧力センサの検出圧力が予め設定された圧力以下になった日の曜日および時刻を前記内部メモリに記憶させ、前記ポンプを次週の同曜日同時刻の数分前から所定の時間だけ強制的に運転させることを特徴とする。
【0006】
本発明の好ましい態様は、前記ポンプの強制運転中に圧力変動が生じなかった場合は、前記ポンプをその次の週の同曜日同時刻に通常運転させることを特徴とする。
本発明の好ましい態様は、前記ポンプ、前記モータ、及び前記インバータは、それぞれ複数台のポンプ、複数台のモータ、及び複数台のインバータであり、前記複数台のインバータは前記複数台のモータにそれぞれ接続されており、前記複数台のポンプを同一速度で起動させることを特徴とする。
本発明の好ましい態様は、前記ポンプは複数台のポンプであり、該複数台のポンプは、前記インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを含み、前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする。
【0007】
本発明の他の態様は、インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを備えた給水装置の始動方法であって、前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする。
【0008】
本発明のさらに他の態様は、ポンプと、前記ポンプを駆動するモータと、前記モータの回転周波数を制御するインバータと、前記ポンプの吐出側の圧力を検知する圧力センサと、前記圧力センサの検出圧力が予め設定された圧力以下になった日の曜日および時刻を記憶する内部メモリとを備え、前記ポンプは次週の同曜日同時刻の数分前から所定の時間だけ強制的に運転されることを特徴とする給水装置である。
【0009】
本発明の好ましい態様は、前記ポンプの強制運転中に圧力変動が生じなかった場合は、前記ポンプはその次の週の同曜日同時刻に通常運転されることを特徴とする。
本発明の好ましい態様は、前記ポンプ、前記モータ、及び前記インバータは、それぞれ複数台のポンプ、複数台のモータ、及び複数台のインバータであり、前記複数台のインバータは前記複数台のモータにそれぞれ接続されており、前記複数台のポンプは同一速度で起動されることを特徴とする。
本発明の好ましい態様は、前記ポンプは複数台のポンプであり、該複数台のポンプは、前記インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを含み、前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする。
【0010】
本発明のさらに他の態様は、インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを備えた給水装置であって、前記第2のポンプは前記第1のポンプよりも先に駆動され、その後、所定時間経過後に前記第1のポンプが駆動されることを特徴とする。
【0011】
本発明の一参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法が提供される。この方法によれば、検出圧力が所定の停止圧力から所定の始動圧力以下になったときに給水装置が始動される。上記検出圧力が上記所定の停止圧力から上記所定の始動圧力に変化する過程において、所定の基準時刻における上記検出圧力が所定の基準値よりも低い場合に、次回の始動時の始動圧力が上げられる。この場合において、上記所定の基準値は、上記停止時圧力と上記始動圧力との中間値とすることができる。
【0012】
本発明の他の参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法が提供される。この方法によれば、検出圧力が所定の停止圧力から所定の始動圧力以下になったときに給水装置が始動される。上記検出圧力が上記所定の停止圧力から上記所定の始動圧力に変化する過程において、所定の基準値の圧力が検出される時刻が所定の基準時刻よりも早い場合に、次回の始動時の始動圧力が上げられる。この場合において、上記所定の基準値は、上記停止時圧力と上記始動圧力との中間値とすることができる。
【0013】
本発明のさらに他の参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法が提供される。この方法によれば、複数のポンプのモータが同一周波数で起動される(揃速起動工程)。同一周波数で運転されているn台のモータの運転周波数と目標圧力の下限値に対応する下限周波数との差が、上記モータの最大運転周波数と上記下限周波数との差の(n−1)/n以下であるか否かが判断される(周波数判断工程)。上記周波数判断工程において(n−1)/n以下であると判断された場合に、運転されているポンプのうちの1台が停止された後、上記周波数判断工程が繰り返される(反覆工程)。上記周波数判断工程において(n−1)/n以下ではないと判断された場合に、少なくとも1つのポンプのモータの周波数を固定するとともに、他のポンプのモータの周波数を変化させる(運転移行工程)。この場合において、運転されているポンプが1台になるまで上記反覆工程を繰り返すことが好ましい。
【0014】
本発明のさらに他の参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法が提供される。この方法によれば、検出圧力が所定の停止圧力から所定の始動圧力以下になったときに給水装置が始動される。上記検出圧力が上記所定の停止圧力から上記所定の始動圧力に変化する過程において、所定の期間における上記検出圧力の低下が上記停止時圧力と上記始動圧力との差に対する所定の割合より大きい場合に、次回の始動時の始動圧力が上げられる。
【0015】
本発明のさらに他の参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置の始動方法が提供される。この方法によれば、複数のポンプのモータを同一周波数で起動される(揃速起動工程)。同一周波数で運転されている複数台のモータの運転周波数に基づいて、運転されている複数台のポンプのうち一部を停止してもよいかが判断される(周波数判断工程)。上記周波数判断工程において停止してもよいと判断された場合に、運転されているポンプの一部が停止される(停止工程)。この場合において、上記周波数判断工程において停止する必要がないと判断された場合には、少なくとも1つのポンプのモータの周波数が固定される(運転移行工程)ことが望ましい。
【0016】
本発明のさらに他の参考例によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる給水装置が提供される。この給水装置は、複数のポンプと、上記複数のポンプを駆動するモータと、上記ポンプの吐出側の圧力が所定の圧力に維持されるように上記モータの速度を制御する制御部とを備えている。上記制御部は、次のように上記モータを制御する。複数のポンプのモータを同一周波数で起動する(揃速起動工程)。同一周波数で運転されているn台のモータの運転周波数と目標圧力の下限値に対応する下限周波数との差が、上記モータの最大運転周波数と上記下限周波数との差の(n−1)/n以下であるか否かを判断する(周波数判断工程)。上記周波数判断工程において(n−1)/n以下であると判断された場合に、運転されているポンプのうちの1台を停止した後、上記周波数判断工程を繰り返す(反覆工程)。上記周波数判断工程において(n−1)/n以下ではないと判断された場合に、少なくとも1つのポンプのモータの周波数を固定するとともに、他のポンプのモータの周波数を変化させる(運転移行工程)。
【発明の効果】
【0017】
本発明に係る給水装置の始動方法および給水装置によれば、学校などの施設におけるトイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態における給水装置を示す模式図である。
【図2】図1に示す給水装置におけるポンプの運転特性曲線を示すグラフである。
【図3】図1に示す給水装置の始動時の圧力変化の一例を示すグラフである。
【図4】図1に示す給水装置の始動時の圧力変化の他の例を示すグラフである。
【図5】本発明の他の実施形態における給水装置を示す模式図である。
【図6】図1に示す給水装置の構造の一例を示す正面図である。
【図7】図6の平面図である。
【図8】図1に示す給水装置の構造の他の例を示す正面図である。
【図9】図8の平面図である。
【図10】本発明の他の実施形態における給水装置の始動方法を示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明に係る給水装置の実施形態について図1から図10を参照して詳細に説明する。なお、図1から図10において、同一または相当する構成要素には、同一の符号を付して重複した説明を省略する。
【0020】
図1は、本発明の一実施形態における給水装置10を示す模式図である。図1に示すように、給水装置10は、水道本管12に接続される複数台のポンプ14と、ポンプ14を駆動するモータ16と、モータ16の回転周波数を制御するインバータ18と、インバータ18をはじめとする各種機器を制御する制御部20とを備えている。モータ16は制御部20に接続されており、例えば、モータ16に設けた光学式または磁気式のロータリーエンコーダからの出力信号によりモータ16またはポンプ14の回転速度が制御部20でモニタされるようになっている。ここでは、複数台のポンプ14を備えた給水装置について説明するが、ポンプが1台の場合もあり得る。
【0021】
給水装置10のポンプ14は、水道本管12から延びる上流給水管22に吸込管24を介してそれぞれ接続され、ポンプ14の吐出側には吐出管26が接続されている。各吐出管26には、ポンプ14が停止した場合に吐出側から吸込側に水が逆流することを防止し、吐出管26内の圧力を維持するための逆止弁28と、吐出管26内の水量が少なくなったことを検出するフロースイッチ30とが設けられている。このフロースイッチ30は、ポンプ14から吐出管26に吐出される水量が設定量Qminよりも少なくなると動作し、過少水量検出信号を発する。フロースイッチ30は制御部20に接続されており、フロースイッチ30の出力信号により吐出管26内の過少水量が制御部20でモニタされるようになっている。なお、フロースイッチ30を垂直吐出管に配置する場合には、垂直吐出管をモータ16の軸方向と同一の方向に配置すれば、ポンプ14からの吐き出し流体による流れの影響を避けることができ、安定した検知が可能となる。
【0022】
図1に示すように、それぞれのポンプ14からの吐出管26は1本の合流管32に合流されており、この合流管32には、合流管32の圧力を検知する圧力センサ34と、合流管32中の水を蓄えておく圧力タンク36とが、それぞれ枝管38,39を介して取り付けられている。圧力センサ34は制御部20に接続されており、圧力センサ34の出力信号により合流管32(吐出管26)内の水圧が制御部20でモニタされるようになっている。
【0023】
給水装置10の合流管32は、ビルやマンションなどの建物内の需要家の給水末端40に延びる下流給水管42に接続されており、上述した給水装置10により水道本管12の水が需要家に供給されるようになっている。これらの給水末端40は、例えば、分岐した下流給水管42のそれぞれに設けられる給湯器や給水栓、トイレ洗浄用のフラッシュバルブなどである。
【0024】
ここで、図1に示すように、制御部20には、液晶画面等の表示部と数値入力用のテンキーまたは増減ボタンとを有する入力パネル44が取り付けられている。この入力パネル44を介して、操作者は、目標圧力の上限値(上限圧力)PUや下限値(下限圧力)PL、過少水量時の停止圧力P0、上限圧力PUと下限圧力PLとの差圧PD、その他制御に必要な情報を入力できるようになっている。例えば、入力パネル44の液晶画面のタッチパネルやボタンを押すことにより上記制御に必要な情報を入力できるようになっている。また、上限圧力PUおよび下限圧力PLは、例えば、ポンプ14を設置するときの条件、すなわち、給水を行う建物の高さや、給水栓までの配管の長さ、配管抵抗、保証すべき吐出管内の圧力などを考慮して、入力パネル44を介して設定および変更できるようになっている。
【0025】
図1に示すように、制御部20は、中央演算処理装置(CPU)46と内部メモリ48とタイマ49とを備えており、入力パネル44から入力された情報は、CPU46を介して内部メモリ48に記憶される。制御部20の内部では、モータ16のゲート制御信号が演算され、このゲート制御信号がインバータ18に送られてインバータ18内部のゲートトランジスタが駆動される。インバータ18は、電気的に接続されたモータ16に速度制御信号を送り、所定の回転速度でポンプ14を駆動させる。なお、ポンプ14の駆動にあたっては、例えば、パルス幅変調(PWM)やパルス振幅変調(PAM)により交流電圧を無段階に制御することにより、効率良く高速でポンプ14を運転することができる。
【0026】
制御部20は、入力パネル44から入力された情報および圧力センサ34からの出力信号等に基づいて、インバータ18を介してポンプ14の回転速度(回転周波数)を可変速制御する。すなわち、制御部20は、インバータ18を制御して所定の交流電圧もしくは直流電圧をモータ16に印加し、モータ16を増減速させる。モータ16の回転が高速になるのに伴って、ポンプ14の吐出量が増大する。このとき、吐出管26内の水圧は上昇するが、この圧力は圧力センサ34により逐次検出されており、制御部20は、圧力センサ34により検出される圧力が目標圧力に一致するように、ポンプ14の回転速度をフィードバック制御する。
【0027】
ここで、需要家の給水末端40において水が使用され、圧力センサ34により検出される検出圧力が予め設定された始動圧力P1以下に低下すると、給水装置10のポンプ14が始動される。ポンプ14がモータ16により駆動されると、水道本管12の水が吸込管24を介してポンプ14に吸い込まれ、所定の圧力で吐出管26に吐出される。吐出管26に吐出された水は、合流管32および下流給水管42を通って需要側の給水末端40に給水される。ポンプ14により揚水される水は、中層住宅や高層住宅、商業用ビルなどの最も高い位置に設けられる給水末端40aにも十分給水できる圧力に加圧される。
【0028】
ポンプ14の運転中に、給水末端40における水の使用量が少なくなり、水量が設定量Qminよりも少なくなってフロースイッチ30が動作すると、ポンプ14の運転が停止される。このポンプ14の停止にあたっては、一時的にポンプ14の運転速度を上げて吐出圧力を上げることによって、圧力タンク36内に十分な水を蓄圧する。最終的には、圧力タンク36内の水が所定の停止圧力P0に昇圧された状態で給水装置10が停止される。
【0029】
その後、給水末端40において水が使用されると、しばらくは圧力タンク36から水が供給されるが、圧力タンク36の水が少なくなり、圧力センサ34の検出圧力が上述した始動圧力P1以下に低下すると、ポンプ14が再び起動される。
【0030】
なお、ポンプ14の始動開始後一定の時間においては、フロースイッチ30からの過少水量検出信号をキャンセルするようにしてもよい。このようにすることで、給水設備の諸条件により、ポンプ14が始動してからしばらくの間は水が流れないような場合であっても、過少水量の検出によってポンプ14が停止されることを防止することができる。また、ポンプ14の吐出圧力が所定の値よりも低い場合には、フロースイッチ30から過少水量検知信号が送られてもポンプ14の停止処理を行わないように制御部20をプログラムしてもよい。このようにすることで、ポンプ14の運転中の吐出圧力を常に所定の値よりも低くならないようにすることができ、過少水量による停止処理の頻度を低くすることができる。
【0031】
ここで、上述したように、制御部20は、圧力センサ34により検出された圧力が目標圧力に一致するように、ポンプ14の回転速度を制御するが、このときの制御としては、ポンプ14の吐出圧力が一定になるようにポンプ14の回転速度を制御する吐出圧力一定制御や、配管の末端圧力が一定となるようにポンプ14の吐出圧力の目標値を逐次演算し、この目標値にポンプ14の吐出圧力が一致するようにポンプ14の回転速度を制御する推定末端圧力一定制御などがなされる。これらの制御方法のうち、推定末端圧力一定制御について説明する。
【0032】
推定末端圧力は、最高所および/または最長配管の末端40aにおける圧力を推定したものであり、この末端40aがポンプ14の目標吐出圧力を支配する。この末端における圧力を一定にするようなポンプ14の吐出圧力が目標圧力として演算され、ポンプ14の吐出圧力が目標圧力となるようにポンプ14の回転速度が制御される。
【0033】
図2は、ポンプ14の運転特性曲線を示すものであり、横軸が水量、縦軸が圧力(ヘッドまたは揚程)を表している。曲線N1〜N4は、各回転速度におけるポンプ14の運転特性を示しており、N1は、ポンプ14の最高回転速度における特性曲線である。ここで、抵抗曲線Rは、ポンプ14から給水末端40までの使用水量に応じた管路損失であり、水量が0の点を原点として使用水量Qの略二乗に比例する曲線となっている。
【0034】
推定末端圧力一定制御においては、使用水量に応じた(抵抗曲線Rで示される)管路損失を見込んだ制御がなされるため、抵抗曲線Rに沿って目標圧力が逐次演算される。この演算された目標圧力は制御部20の内部メモリ48に一時的に記憶される。制御部20は、ポンプ14の吐出圧力が、演算された目標圧力となるようにポンプ14の回転速度を制御する。
【0035】
図2において、最高回転速度における運転点は点A1であり、この点A1における圧力は上限圧力PU、水量はQ1となっている。ポンプ14の回転速度を下げることにより、運転点は、点A1から点A2、点A3を通る抵抗曲線R上を移動する。例えば、図2に示すように、水量Qxのときの目標圧力Pxが抵抗曲線Rに沿って演算され、ポンプ14の吐出圧力がこの目標圧力Pxになるようにポンプ14の回転速度が設定される。
【0036】
水量が設定量Qminよりも少なくなってフロースイッチ30が動作すると、ポンプ14の停止処理が開始される。このポンプ停止処理においては、ポンプ14の吐出圧力の目標値を上述した抵抗曲線Rに沿った目標圧力から、予め設定された停止圧力P0に一時的に変更する。これにより、ポンプ14の回転速度が上げられ、最終的にはポンプ14の吐出圧力は停止圧力P0に達し、ポンプ14が停止される。なお、フロースイッチ30が動作した後、過少水量の状態が一定時間継続してはじめてポンプ14の停止処理を開始することが好ましい。この過少水量の状態の継続時間は、例えば、直前のポンプ14の運転状態により逐次変化させることができる。このようにすることで、ポンプ14の停止処理およびそれに続くポンプ14の起動処理の頻度を減らし、装置の耐久性の向上および長寿命化を図ることができる。
【0037】
制御部20は、内部メモリ48に記憶された上限圧力PUおよび下限圧力PLに基づいて上記停止圧力P0を演算できるようになっている。例えば、停止圧力P0が上限圧力PUまたはこれ以上の値となるように演算される。また、制御部20は、ポンプ14の始動圧力P1も演算できるようになっており、例えば、下限圧力PLと同等の圧力または下限圧力PLより若干低い圧力となるように始動圧力P1が演算される。
【0038】
また、下限圧力PLを入力された上限圧力PUから演算してもよい。例えば、給水末端40の最高位置がビルの5階である場合には、上限圧力PUを14mとし、上限圧力PUから約15%低い12mを下限圧力PLとしてもよい。このように、下限圧力PLを上限圧力PUよりも約15%低く設定するのは、配管抵抗分がおよそ15%程度と見積もられるからである。
【0039】
例えば、上述した制御部20の入力パネル44を介して上限圧力PUと割合D%とを入力し、下限圧力PLをPL=PU−(PU×D%)により求めてもよい。あるいは、上限圧力PUと差圧PDとを入力し、下限圧力PLをPL=PU−PDにより求めてもよい。なお、上限圧力PUと下限圧力PLとを同一の値に設定すれば、吐出圧力一定制御を行うことができる。この場合には、停止圧力P0はPU(=PL)となり、始動圧力はPU−PDとなるため、ポンプ14による過剰な加圧は行われない。
【0040】
ここで、上述した給水装置10が例えば学校などの施設における給水のために設置されている場合、休み時間などにトイレ洗浄用のフラッシュバルブが同時に使用されることにより給水不足が生じる場合がある。本実施形態では、このような給水不足を解消するために、以下に述べるような方法により給水装置10を始動する。
【0041】
上述したように、給水末端40で水が使用され、圧力センサ34の検出圧力が停止圧力P0から低下し、始動圧力P1になると給水装置10が始動される。このとき、圧力低下が始まってから所定の時刻における圧力センサ34の検出圧力を内部メモリ48に記憶し、この値と基準値、例えば停止圧力P0と始動圧力P1との中間値((P0+P1)/2))とを比較する。検出圧力が基準値よりも低いということは、急激な圧力低下が生じていることを示しているため、このことを内部メモリ48に記憶しておく。例えば、図3のグラフL1に示すように、圧力低下が始まってから所定の時刻t0における検出圧力P2が停止圧力P0と始動圧力P1との中間値((P0+P1)/2))よりも低い場合には、内部メモリ48には急激な圧力低下が生じていることが記憶される。一方、グラフL2に示すように、所定の時刻t0における検出圧力P3が停止圧力P0と始動圧力P1との中間値((P0+P1)/2))よりも高い場合には、通常の圧力低下として扱われる。
【0042】
急激な圧力低下が内部メモリ48に記憶された場合には、次回給水装置10が始動されるときの始動圧力をP1よりも高く設定することによって、早めにポンプ14が起動されるようにする。このようにすれば、次回給水装置10が始動されるときには、ポンプ14が通常よりも早めに起動されるので、大量の水の同時使用に対しても十分な給水を行うことができる。
【0043】
例えば、上限圧力PUと下限圧力PLとの差が5m以上ある場合は、始動圧力を上限圧力PUと下限圧力PLとの中間値((PU+PL)/2))に設定することができる。上限圧力PUと下限圧力PLとの差が5mより小さい場合は、始動圧力を上限圧力PUから2.5m低い値(PU−2.5)に設定することができる。なお、通常の圧力低下として扱われる場合には、例えば、上限圧力PUと下限圧力PLとの差が5m以上ある場合は、始動圧力をPLとし、上限圧力PUと下限圧力PLとの差が5mより小さい場合は、始動圧力を上限圧力PUから5m低い値(PU−5)に設定することができる。
【0044】
上述の例では、所定の時刻t0における検出圧力に基づいて急激な圧力低下を判断しているが、検出圧力が所定の基準値になったときの時刻に基づいて判断することもできる。すなわち、図3のグラフにおいて、圧力センサ34の検出圧力が停止圧力P0と始動圧力P1との中間値((P0+P1)/2))になるときの時刻が、所定の時刻t0よりも早い場合には急激な圧力低下が生じていると判断し、所定の時刻t0よりも遅い場合には通常の圧力低下であると判断することができる。
【0045】
また、図4に示すように、給水装置10の始動時に、圧力センサ34の検出圧力が停止圧力P0から始動圧力P1に変化する過程において、任意の期間Δtにおける検出圧力の低下ΔPが、停止時圧力P0と始動圧力P1との差(P0−P1)に対する所定の割合より大きい場合に、次回の始動時の始動圧力を上げることとしてもよい。
【0046】
このような方法により、トイレ洗浄用のフラッシュバルブを同時使用したときなどに生じる給水圧力不足を解消することができる。また、この方法以外に、給水圧力不足を解消するために以下のような方法を行うこともできる。
【0047】
例えば、制御部20に内蔵されたタイマ49に日時認識機能(時計機能)を設け、トイレ洗浄用のフラッシュバルブの同時使用などにより大量の水が一時的に使用され、圧力センサ34の検出圧力が予め設定された圧力以下になった場合、その日の曜日および時刻を内部メモリ48に記憶しておく。学校などにおいては、次週の同曜日同時刻には同じように給水不足が生じると考えられるため、次週の同曜日同時刻の数分前になると、圧力センサ34の検出圧力に関係なく、ポンプ14を所定の時間だけ強制的に運転させてもよい。このような方法によっても、急激な圧力低下による始動時の給水圧力不足を解消することができる。
【0048】
この場合において、ポンプ14の強制運転中に、実際に大量の水が使用され、圧力変動が生じた場合には、その次の週の同曜日同時刻についても同様の強制運転を行い、圧力変動が生じなかった場合には、その次の週の同曜日同時刻には、ポンプ14の強制運転を行わず通常の運転を行うこととしてもよい。
【0049】
また、通常、ポンプ14を起動するときには、圧力センサ34の検出圧力からモータ16の運転周波数が決定され、決定された周波数にてポンプ14が起動される。このため、水量が多い状態でポンプ14が起動されると、インバータ18によるポンプ起動のタイムラグが生じ、圧力低下が生じる場合がある。これを解消するため、まず、給水装置10の始動時には、演算された目標圧力に関係なく、ポンプ14を最大運転周波数で起動し、その後、所定時間経過後に推定末端圧力一定制御または吐出圧力一定制御に移行させてもよい。この場合において、ポンプ14の周波数を起動時に最大運転周波数まで上げるときに、周波数の時間変化がグラフ上でS字を描くように周波数を変化させるS字加速運転を行ってもよいし、最大運転周波数になるまでの時間を通常時よりも短く設定してもよい。
【0050】
また、図5に示すように、給水装置が、インバータ18により制御されるモータ16により駆動されるポンプ14aと、商用電源60に直接接続されたモータ16により駆動されるポンプ14bとから構成される場合は、通常、省エネルギーのため先にインバータ18付のポンプ14aが駆動され、その後水量が足らなくなったときに商用電源60に直結されたポンプ14bが駆動される。しかしながら、上述したようにインバータ18付のポンプ14aでは起動時にタイムラグが生じるため、急激な圧力低下が生じた場合には給水圧力不足が生じる可能性がある。このような給水圧力不足を解消するため、給水装置の始動時には、先に商用電源60に直結されたポンプ14bを駆動し、瞬時にポンプ14bを起動させ、その後、所定時間経過後にインバータ18付のポンプ14aを駆動することとしてもよい。
【0051】
また、給水末端40aがトイレ等である場合には、人が便座に座ったり、便器の前に立ったりする動作に反応する人感センサをトイレに設置し、この人感センサが作動したときに、実際の水の使用状況に関係なく、所定時間ポンプを強制的に起動させることとしてもよい。
【0052】
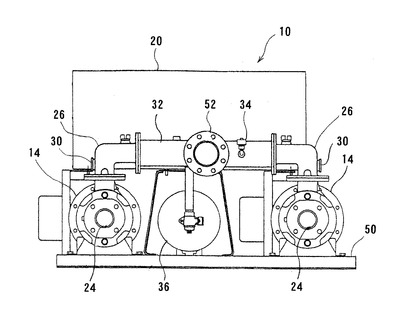
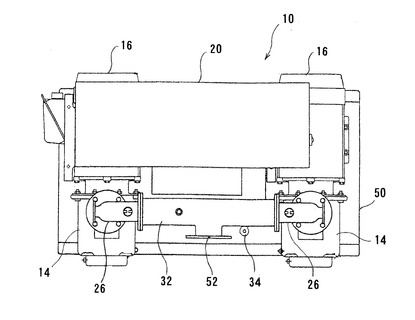
図6は図1に示す給水装置10の構造の一例を示す正面図、図7は図6の平面図である。図6および図7に示すように、給水装置10は、ベース50上に設置された2台のポンプ14と、それぞれのポンプ14を駆動する2台のモータ16と、各モータ16の回転速度を制御する制御部20とを備えている。
【0053】
各ポンプ14には、上流給水管からの水を吸い込む吸込管24と、加圧した水を吐出する吐出管26とが取り付けられている。各吐出管26には、吐出管26の水量が所定の量よりも少なくなったことを検出するフロースイッチ30が設けられている。また、これらの吐出管26は合流管32に合流されている。2台のポンプ14の間には、圧力タンク36がベース50上に設置されており、この圧力タンク36は合流管32に接続されている。また、合流管32には、吐出される水の圧力を検出する圧力センサ34が設けられている。
【0054】
このような構成の給水装置10において、吸込管24から吸い込まれた水は、ポンプ14により加圧された後、合流管32を通って吐出口52から吐出され、下流給水管を介して給水端末に供給される。ここで、ポンプ14の吐出側の圧力が所定の目標圧力になるように、各モータ16の回転速度が可変制御される。
【0055】
なお、給水装置10の全体の振動を防止するために、ベース50の任意の位置に切欠き孔(図示せず)を形成することが好ましい。このような切欠き孔を振動の共振点に形成することにより、防振効果を得ることができ。また、ベース50にリブ(図示せず)を設けることで、より一層の防振効果を得ることができる。切欠き孔の形状は、別の共振点が生じるような角部を有していなければ、どのようなものであってもよい。例えば、円形や楕円形の切欠き孔を設けることができる。
【0056】
上述の例では、2台のポンプ14を備えた給水装置10について説明したが、ポンプ14の台数は2台に限られるものではない。図8および図9は、5台のポンプを備えた給水装置110の例であり、図8は正面図、図9は平面図である。図8および図9に示すように、給水装置110は、ベース150上に設置された5台のポンプ114a,114bと、それぞれのポンプを駆動するモータ116と、各モータ116の回転速度を制御する制御部120とを備えている。
【0057】
各ポンプ114a,114bには、上流給水管からの水を吸い込む吸込管124と、加圧した水を吐出する吐出管126とが取り付けられている。各吐出管126には、吐出管126の水量が所定の量よりも少なくなったことを検出するフロースイッチ130が設けられている。
【0058】
図8および図9に示す給水装置110は、3台のポンプ114aの吐出管126に接続される第1の合流管132aに、ポンプ114bの吐出管126に接続される第2の合流管132bを2つ接続した構造となっている。このように、3台のポンプ114aから構成されるベースユニット133aに、1台のポンプ114bから構成される付加ユニット133bをポンプ114aの並び方向に任意の数だけ接続することで、ユーザの要求に応じたポンプ台数の給水装置を簡単に構成することができる。
【0059】
また、第1の合流管132aには、吐出される水の圧力を検出する圧力センサ134が設けられている。ベース150上には、圧力タンク136が設置されており、この圧力タンク136は第1の合流管132aに接続されている。このように、制御部120の下部に圧力タンク136をポンプ114a,114bと並列に設置することにより、圧力タンク136のメンテナンス時および交換時に圧力タンク136内の水が制御部120にかかることが防止される。
【0060】
この例では、第1の合流管132aの端部には、ブラインドフランジ154を取り付けられており、反対側の第2の合流管132bの端部に吐出口152が形成されている。なお、第2の合流管132bの端部にブラインドフランジ154を取り付け、第1の合流管132aの端部に吐出口152を形成してもよい。
【0061】
このような構成の給水装置110において、吸込管124から吸い込まれた水は、ポンプ114a,114bにより加圧された後、各合流管132a,132bを通って吐出口152から吐出され、下流給水管を介して給水端末に供給される。ここで、ポンプ14の吐出側の圧力が所定の目標圧力になるように、各モータ116の回転速度が可変制御される。
【0062】
図8および図9に示す給水装置110のように、多数のポンプを備えている場合には、上述した急激な圧力低下に対して、図10に示すフローチャートのような方法により対応することもできる。すなわち、給水装置110の始動時に、複数台のポンプ、例えば5台のポンプ114a,114b(以下、ポンプ114aと114bをまとめて符号114で表す)を同時に起動する。このとき、すべてのポンプ114を同一速度(同一周波数)で運転する(揃速起動工程S1)。このように、給水装置110の始動時に複数のポンプ114を同時に起動することにより、急激な圧力低下による始動時の給水圧力不足を解消することができる。
【0063】
給水装置110の始動後、所定の時間が経過したときに、モータ116の運転周波数F1と上述した下限圧力PLに対応するモータ116の周波数FLとの差(F1−FL)が、モータ116の運転最大周波数Fmaxと下限周波数FLとの差(Fmax−FL)の(n−1)/n以下であるか否かを判断する(周波数判断工程S2)。ここで、nは、運転しているポンプ114の台数である。
【0064】
周波数判断工程S2においてF1−FLがFmax−FLの(n−1)/n以下となっている場合には、運転しているn台のポンプ114のうち1台を停止させる(停止工程(解列動作S3)。このとき、運転しているポンプ114が1台になったかどうかが判断され(台数判断工程S4)、1台になったときは、通常のポンプ1台の運転に切り替わる。運転しているポンプ114が複数台ある場合は、上述した周波数判断工程S2に戻り、ポンプ1台になるまで上述した処理が繰り返される(反覆工程)。つまり、ポンプの運転台数を減らしても現在の目標圧力を保つことができるかどうかという判断を、周波数FLに基づいて行うことで、適正なポンプの運転台数まで減らすことができる。なお、本実施形態では周波数判断工程S2においてはポンプ1台を停止してよいかについて判断しているが、3台以上のポンプが運転されている場合には、複数台のポンプを停止してよいかの判断を行うようにしてもよい。
【0065】
周波数判断工程S2においてF1−FLがFmax−FLの(n−1)/n以下となっていなかった場合には、少なくとも1つのポンプ114のモータ116の周波数を固定するとともに、他のポンプ114のモータ116の周波数を変化させる(運転移行工程S5)。
【0066】
このように、図10に示す例によれば、給水装置110の始動時に複数のポンプ114を同時に起動しているので、急激な圧力低下による始動時の給水圧力不足を解消することができる。
【0067】
なお、上述の実施形態においては、給水装置が水道本管に直接接続される場合について説明したが、これに限られるものではなく、例えば、給水装置の上流に水道水をいったん貯留する受水槽を設置し、この受水槽に貯留された水を給水装置により各需要家に供給することとしてもよい。
【0068】
これまで本発明の一実施形態について説明したが、本発明は上述の実施形態に限定されず、その技術的思想の範囲内において種々異なる形態にて実施されてよいことは言うまでもない。
【符号の説明】
【0069】
10,110 給水装置
12 水道本管
14,114a,114b ポンプ
16,116 モータ
18 インバータ
20 制御部
22 上流給水管
24,124 吸込管
26,126 吐出管
28 逆止弁
30,130 フロースイッチ
32,132a,132b 合流管
34,134 圧力センサ
36,136 圧力タンク
38,39 枝管
40 給水末端
42 下流給水管
44 入力パネル
46 CPU
48 内部メモリ
49 タイマ
50,150 ベース
52,152 吐出口
【特許請求の範囲】
【請求項1】
ポンプと、前記ポンプを駆動するモータと、前記モータの回転周波数を制御するインバータと、前記ポンプの吐出側の圧力を検知する圧力センサと、内部メモリとを備えた給水装置の始動方法であって、
前記圧力センサの検出圧力が予め設定された圧力以下になった日の曜日および時刻を前記内部メモリに記憶させ、
前記ポンプを次週の同曜日同時刻の数分前から所定の時間だけ強制的に運転させることを特徴とする給水装置の始動方法。
【請求項2】
前記ポンプの強制運転中に圧力変動が生じなかった場合は、前記ポンプをその次の週の同曜日同時刻に通常運転させることを特徴とする請求項1に記載の給水装置の始動方法。
【請求項3】
前記ポンプ、前記モータ、及び前記インバータは、それぞれ複数台のポンプ、複数台のモータ、及び複数台のインバータであり、前記複数台のインバータは前記複数台のモータにそれぞれ接続されており、
前記複数台のポンプを同一速度で起動させることを特徴とする請求項1または2に記載の給水装置の始動方法。
【請求項4】
前記ポンプは複数台のポンプであり、該複数台のポンプは、前記インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを含み、
前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする請求項1または2に記載の給水装置の始動方法。
【請求項5】
インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを備えた給水装置の始動方法であって、
前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする給水装置の始動方法。
【請求項6】
ポンプと、
前記ポンプを駆動するモータと、
前記モータの回転周波数を制御するインバータと、
前記ポンプの吐出側の圧力を検知する圧力センサと、
前記圧力センサの検出圧力が予め設定された圧力以下になった日の曜日および時刻を記憶する内部メモリとを備え、
前記ポンプは次週の同曜日同時刻の数分前から所定の時間だけ強制的に運転されることを特徴とする給水装置。
【請求項7】
前記ポンプの強制運転中に圧力変動が生じなかった場合は、前記ポンプはその次の週の同曜日同時刻に通常運転されることを特徴とする請求項6に記載の給水装置。
【請求項8】
前記ポンプ、前記モータ、及び前記インバータは、それぞれ複数台のポンプ、複数台のモータ、及び複数台のインバータであり、前記複数台のインバータは前記複数台のモータにそれぞれ接続されており、
前記複数台のポンプは同一速度で起動されることを特徴とする請求項6または7に記載の給水装置。
【請求項9】
前記ポンプは複数台のポンプであり、該複数台のポンプは、前記インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを含み、
前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする請求項6または7に記載の給水装置。
【請求項10】
インバータにより制御されるモータにより駆動される第1のポンプと、
商用電源に直接接続されたモータにより駆動される第2のポンプとを備えた給水装置であって、
前記第2のポンプは前記第1のポンプよりも先に駆動され、その後、所定時間経過後に前記第1のポンプが駆動されることを特徴とする給水装置。
【請求項1】
ポンプと、前記ポンプを駆動するモータと、前記モータの回転周波数を制御するインバータと、前記ポンプの吐出側の圧力を検知する圧力センサと、内部メモリとを備えた給水装置の始動方法であって、
前記圧力センサの検出圧力が予め設定された圧力以下になった日の曜日および時刻を前記内部メモリに記憶させ、
前記ポンプを次週の同曜日同時刻の数分前から所定の時間だけ強制的に運転させることを特徴とする給水装置の始動方法。
【請求項2】
前記ポンプの強制運転中に圧力変動が生じなかった場合は、前記ポンプをその次の週の同曜日同時刻に通常運転させることを特徴とする請求項1に記載の給水装置の始動方法。
【請求項3】
前記ポンプ、前記モータ、及び前記インバータは、それぞれ複数台のポンプ、複数台のモータ、及び複数台のインバータであり、前記複数台のインバータは前記複数台のモータにそれぞれ接続されており、
前記複数台のポンプを同一速度で起動させることを特徴とする請求項1または2に記載の給水装置の始動方法。
【請求項4】
前記ポンプは複数台のポンプであり、該複数台のポンプは、前記インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを含み、
前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする請求項1または2に記載の給水装置の始動方法。
【請求項5】
インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを備えた給水装置の始動方法であって、
前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする給水装置の始動方法。
【請求項6】
ポンプと、
前記ポンプを駆動するモータと、
前記モータの回転周波数を制御するインバータと、
前記ポンプの吐出側の圧力を検知する圧力センサと、
前記圧力センサの検出圧力が予め設定された圧力以下になった日の曜日および時刻を記憶する内部メモリとを備え、
前記ポンプは次週の同曜日同時刻の数分前から所定の時間だけ強制的に運転されることを特徴とする給水装置。
【請求項7】
前記ポンプの強制運転中に圧力変動が生じなかった場合は、前記ポンプはその次の週の同曜日同時刻に通常運転されることを特徴とする請求項6に記載の給水装置。
【請求項8】
前記ポンプ、前記モータ、及び前記インバータは、それぞれ複数台のポンプ、複数台のモータ、及び複数台のインバータであり、前記複数台のインバータは前記複数台のモータにそれぞれ接続されており、
前記複数台のポンプは同一速度で起動されることを特徴とする請求項6または7に記載の給水装置。
【請求項9】
前記ポンプは複数台のポンプであり、該複数台のポンプは、前記インバータにより制御されるモータにより駆動される第1のポンプと、商用電源に直接接続されたモータにより駆動される第2のポンプとを含み、
前記給水装置の始動時には、先に前記第2のポンプを駆動させ、その後、所定時間経過後に前記第1のポンプを駆動させることを特徴とする請求項6または7に記載の給水装置。
【請求項10】
インバータにより制御されるモータにより駆動される第1のポンプと、
商用電源に直接接続されたモータにより駆動される第2のポンプとを備えた給水装置であって、
前記第2のポンプは前記第1のポンプよりも先に駆動され、その後、所定時間経過後に前記第1のポンプが駆動されることを特徴とする給水装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−229699(P2012−229699A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2012−162199(P2012−162199)
【出願日】平成24年7月23日(2012.7.23)
【分割の表示】特願2010−249272(P2010−249272)の分割
【原出願日】平成16年12月3日(2004.12.3)
【出願人】(000000239)株式会社荏原製作所 (1,477)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成24年7月23日(2012.7.23)
【分割の表示】特願2010−249272(P2010−249272)の分割
【原出願日】平成16年12月3日(2004.12.3)
【出願人】(000000239)株式会社荏原製作所 (1,477)
【Fターム(参考)】
[ Back to top ]