
給湯装置及びその方法
【課題】 本発明は注湯量分を高精度に汲み上げて全量を一気に注湯することにより、注湯時間を短縮して生産性を向上させることができる給湯方法及びその装置を目的とするものである。
【解決手段】 少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアーム5に取り付けられる取鍋4により溶湯を汲み上げて鋳型に注湯する給湯装置であって、取鍋4で汲み上げられた溶湯を流出させて注湯量と一致するよう取鍋4を俯角傾動させる回動角度調整自在な回動軸5bをロボットアーム5に取り付け、注湯量に応じて回動軸5bの回動角度を制御する制御機構を設けた給湯装置及びロボットアーム5に支持された取鍋4を溶湯炉2内に浸漬させて溶湯を汲み上げたうえ、ロボットアーム5の先端に設けた回動角度調整自在な回動軸5bにより取鍋4を一定の俯角度に傾動させて取鍋4内の溶湯を俯角度分流出させて溶湯量を注湯量と一致させる給湯方法である。
【解決手段】 少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアーム5に取り付けられる取鍋4により溶湯を汲み上げて鋳型に注湯する給湯装置であって、取鍋4で汲み上げられた溶湯を流出させて注湯量と一致するよう取鍋4を俯角傾動させる回動角度調整自在な回動軸5bをロボットアーム5に取り付け、注湯量に応じて回動軸5bの回動角度を制御する制御機構を設けた給湯装置及びロボットアーム5に支持された取鍋4を溶湯炉2内に浸漬させて溶湯を汲み上げたうえ、ロボットアーム5の先端に設けた回動角度調整自在な回動軸5bにより取鍋4を一定の俯角度に傾動させて取鍋4内の溶湯を俯角度分流出させて溶湯量を注湯量と一致させる給湯方法である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は各種鋳造において注湯量分の鉄やアルミニウム等の溶湯を型に注湯する給湯装置及びその方法に関するものである。
【背景技術】
【0002】
従来、鋳型に注湯する溶湯量は鋳型を載置した台車を持ち上げて重量を計量器で計量するものがある(例えば、特許文献1参照)。また、溶湯を入れた取鍋の重量を測定する力センサをハンドと取鍋の間に設けて残りの溶湯重量を計測するとともに、溶湯の流れ状態を監視するカメラと、押湯の上昇を検出する距離センサとを設けたものがある(例えば、特許文献2参照)。
【0003】
しかし、特許文献1のものは鋳型と台車を持ち上げて計量するため装置が大掛かりなるという問題があるうえに、台車の位置決めを高精度で行なえないため、注湯時には作業員による確認が必要となる問題がある。また、特許文献2のものは、力センサの他にカメラや距離センサを協働させて注湯を行うためシステムのチューニングが難しいという問題がある。さらに、特許文献1、2のいずれも注湯量を確認しながら注湯を行うため注湯に時間がかかり生産性を高められないうえに、取鍋に貯留されている溶湯により注湯を繰り返すため最後の注湯を完了するまでに時間がかかって溶湯の温度が低下し成形不良を生じることがあるいう問題がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−90616号公報
【特許文献2】特開平8−168871号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は注湯量分を高精度に汲み上げて全量を一気に注湯することにより、注湯時間を短縮して生産性を向上させることができるうえに成形不良を生じにくい給湯装置及びその方法を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
本発明は、少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアームを設けるとともに、該ロボットアームに溶湯炉から溶湯を汲み上げて鋳型に注湯する取鍋を取り付けた給湯装置であって、取鍋で汲み上げられた溶湯を流出させて注湯量と一致するよう取鍋を俯角傾動させる回動角度調整自在な回動軸をロボットアームに取り付けるとともに、注湯量に応じて回動軸の回動角度を制御する制御機構を設けた給湯装置及び少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアームに取り付けられる取鍋により溶湯を汲み上げて鋳型に注湯する給湯方法であって、前記ロボットアームに支持された取鍋を溶湯炉内に浸漬させて溶湯を汲み上げたうえ、ロボットアームの先端に設けた回動角度調整自在な回動軸により取鍋を一定の俯角度に傾動させて取鍋内の溶湯を俯角度分流出させて溶湯量を注湯量と一致させる給湯方法である。
【0007】
なお、給湯装置において、鉛直線が取鍋の重心を通る重量測定用のロードセルを回転軸に取り付けたり、制御機構に、溶湯を汲み上げた取鍋を移送中に緊急停止信号が入力された時、ロボットアームの移送処理が完了までロボットアームの駆動機構を停止しないように制御する機能を組み込んだり、ロボットアームに緊急停止信号が入力されたとき、取鍋から溶湯がこぼれない減速度となるよう回生抵抗をロボットアームの駆動機構に設けたり、回転軸に取鍋着脱用のツールチャックを取り付けたりしてもよい。
【発明の効果】
【0008】
本発明は、少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアームを設けるとともに、該ロボットアームに溶湯炉から溶湯を汲み上げて鋳型に注湯する取鍋を取り付けた給湯装置であって、取鍋で汲み上げられた溶湯を流出させて注湯量と一致するよう取鍋を俯角傾動させる回動角度調整自在な回動軸をロボットアームに取り付けるとともに、注湯量に応じて回動軸の回動角度を制御する制御機構を設けたことを特徴とする給湯装置であって、前記ロボットアームに支持された取鍋を溶湯炉内に浸漬させて溶湯を汲み上げたうえ、ロボットアームの先端に設けた回動角度調整自在な回動軸により取鍋を一定の俯角度に傾動させて取鍋内の溶湯を俯角度分流出させて溶湯量を注湯量と一致させることにより、取鍋内の溶湯量は高精度で注湯量分とすることができるので、取鍋内の溶湯をダイカスト成形機の供給口から一気に流し込むことができるので、注湯は短時間で完了しダイカスト成形機の稼働率を向上でき生産性を高めることができる。しかも、注湯は取鍋に貯留された溶湯を全量使用するため、溶湯は成形に最適な温度領域で注湯しているので成形不良の発生を減少できる。
【0009】
請求項2のように、鉛直線が取鍋の重心を通る重量測定用のロードセルを回転軸に取り付けることにより、溶湯量が注湯量と一致しているか正確に確認することができる。
【0010】
請求項3のように、制御機構に、溶湯を汲み上げた取鍋を移送中に緊急停止信号が入力された時、ロボットアームの移送処理が完了までロボットアームの駆動機構を停止しないように制御する機能を組み込むことにより、ロボットアームは緊急停止されず、取鍋の移送処理が完了した後に停止されるので、取鍋内の溶湯が反動で溢れ出ることがなく、溢れ出た溶湯の除去作業によりダイカスト成形を停止する必要がないので、稼働率の低下がなく生産性の向上を図ることができる。
【0011】
請求項4のように、ロボットアームに緊急停止信号が入力されたとき、取鍋から溶湯がこぼれない減速度となるよう回生抵抗をロボットアームの駆動機構に設けたことにより、ロボットアームは取鍋内の溶湯が溢れ出ることのない減速度で停止されるので、取鍋内の溶湯が反動で溢れ出ることがない。
【0012】
請求項5のように、回転軸に取鍋着脱用のツールチャックを取り付けることにより、
ツールチャックから取鍋を外して、ツールチャックに他のツールを取り付けることができる。
【図面の簡単な説明】
【0013】
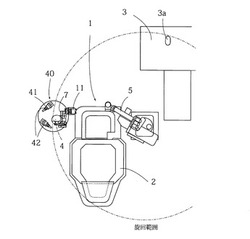
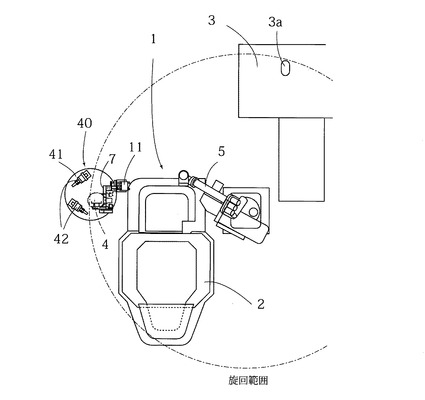
【図1】本発明の好ましい実施形態を示す平面図である。
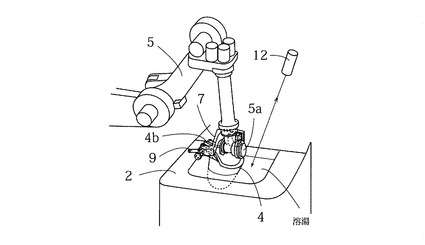
【図2】同じく溶湯の汲み出し状態を示す斜視図である。
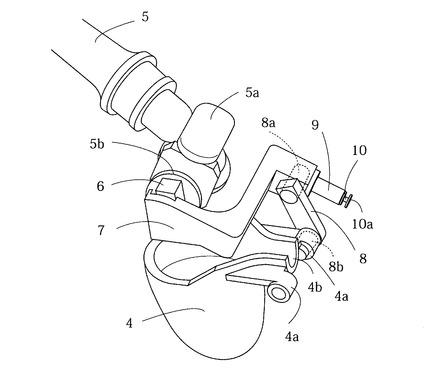
【図3】同じく要部を拡大して示す斜視図である。
【図4】ツール交換ステーションを示す平面図である。
【図5】同じく側面図である。
【図6】同じく正面図である。
【図7】同じくツールチャックのロック解除を示す側面図である。
【図8】同じく平面図である。
【発明を実施するための形態】
【0014】
次に、本発明の給湯装置をダイカスト成形装置に用いた実施形態を図に基づいて詳細に説明する。
1は溶湯炉2から溶湯を汲み上げてダイカスト成形機3に注湯する給湯装置であり、該給湯装置1には溶湯炉2からの溶湯の汲み上げステーションとダイカスト成形機3への注湯ステーション及び取鍋4の脱着を行うツール交換ステーション40間を旋回移動するロボットアーム5が設けられている。該ロボットアーム5は取鍋4の移送時に緊急停止時信号が検出されたとき、移送処理が完了するまでロボットアーム5の駆動機構を停止させないようにしたり、取鍋4内の溶湯が慣性で飛び出ない減速度でロボットアーム5を停止させるよう駆動機構を後記の制御機構で制御したりする。
【0015】
ロボットアーム5の駆動機構の停止の遅延動作は、ロボットアーム5で溶湯を移送中に緊急停止信号が装置に入力された場合、制御機構はロボットアーム5が溶湯の移送ステップを完了して停止動作を行なうまでロボットアーム5の駆動機構を停止させないようにプログラム制御する。
【0016】
また、ロボットアーム5の一定減速度での停止は、ロボットアーム5の駆動機構に組み込まれた回生ブレーキの回生抵抗を溶湯が取鍋4から溢れ出ない減速度となるように変更することにより行なう。
【0017】
また、ロボットアーム5のヘッド5aには回動角度調整自在な回動軸5bが設けられている。該回動軸5bは1°単位で回動角を変えて回動軸5bに取り付けられる取鍋4の傾動角度を調整自在としている。取鍋4を水平から1°俯角させた場合に流出される溶湯量は決まっているので、注湯量に応じて取鍋4の傾動俯角はロボットアーム5のコントローラに組み込まれた制御機構により演算され、回動軸5bの回動角度を制御している。
【0018】
また、前記制御機構は取鍋4による溶湯の汲み上げ後、回動軸5bに取り付けられている重量測定用のロードセル6により取鍋重量と溶湯重量が含まれる総重量を測定し、総重量から取鍋重量を減算して溶湯重量を演算算出し、該溶湯重量とダイカスト成形機3に注湯される規定量との差を算出し、許容範囲内であればダイカスト成形機3への注湯を行う。なお、ロードセル6はその鉛直線上に取鍋の重心が位置するように回転軸に取り付けられているので、取鍋内の溶湯量を正確に計測することができる
【0019】
そして、溶湯が少ない場合は、取鍋4を再度溶湯炉2内に浸漬させて溶湯の再汲み上げをし、算出された不足分量に基づいて取鍋4の俯角度を上向きに調整し溶湯の流出量を減少させて注湯量と一致させる。また、溶湯が多い場合は、算出された超過分量に基づいて取鍋4の俯角度を下向きに調整し溶湯の流出量を増加させて注湯量と一致させる。
【0020】
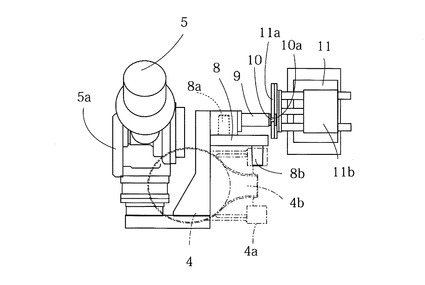
また、前記ロードセル6には取鍋4を着脱自在に取り付ける略L形のツールチャック7が取り付けられており、該ツールチャック7には取鍋4に取り付けられたブラケット8のチャック用ピン8aを着脱自在に嵌合させる取付孔7aが形成されている。
【0021】
9はツールチャック7には前記取付孔7aに嵌合されるチャック用ピン8aを抜け止めするロック機構であり、該ロック機構9はチャック用ピン8aに直交する方向から嵌合されるばねに付勢されたフランジ10a付きのロックピン10を設けたもので、該ロックピン10は外部に張出されているフランジ10aを解除機構11のストッパ11aに係止させばね力に抗して引っ張りチャック用ピン8aを抜き出すことによりツールチャック7のロックは解除され、取鍋4はロボットアーム5から取り外すことができる。
【0022】
また、前記ブラケット8の他端には取鍋4に形成された取付孔4aに嵌合固定される固定ピン8bが形成されている。また、取鍋4の取付孔4aは取鍋4の注ぎ口4bの両側に配設されている。
【0023】
前記解除機構11はツール交換ステーション40に隣接して設けられるものであり、該解除機構11はロックピン10のフランジ10aを係止させるストッパ11aと、該ストッパ11aを進退動させるリニアスライダ11bとからなり、ロックピン10のストッパ11aへの係止はロボットアーム5により行う。
【0024】
また、前記ツール交換ステーション40はロボットアームの旋回内のターンテーブル41上に取鍋保持ブラケット42を複数立設させたものであり、取鍋4の使われていない取付孔4aに取鍋保持ブラケット42の係止ピンを嵌合させて保持させたうえ、前記解除機構11により取鍋4をツールチャック7から外すことにより取鍋4はロボットアーム5から取鍋保持ブラケット42に移行される。なお、取鍋4を取り付ける場合は前記と逆の操作を行えばよい。このようにして取鍋4を取り外したツールチャック7には例えば、溶湯炉2の湯面掻き棒等をチャックして溶湯炉2の湯面に浮いているノロを除去する。
【0025】
12は溶湯炉2の湯面を検出するレベルセンサであり、該レベルセンサ12で検出された湯面高さに基づいて、溶湯炉2内の溶湯量を確認し取鍋4の溶湯炉2内への浸漬深さを決定し、取鍋4に所定量の溶湯が汲み上げられるようにするとともに、取鍋4を浸漬させても溶湯を所定量汲み上げることができない湯面高さの場合、溶湯の汲み上げを中止し取鍋4が溶湯炉2の底面と衝突して破損することがないようにしている。また、レベルセンサは取鍋による溶湯の汲み上げ回数が確認でき、取鍋により汲み上げられる溶湯量が不足することを防止できる。
【0026】
このような給湯装置1は、先ず、ツール交換ステーション40で取鍋保持ブラケット42に保持されている待機中の取鍋4をロボットアーム5のツールチャック7に取り付ける。そして、ツールチャック7に取鍋4が取り付けられたら、ロボットアーム5は取鍋4を溶湯炉2まで搬送移動させる。
【0027】
溶湯炉2ではレベルセンサ12で湯面高さが検出されているので、湯面高さに基づいて取鍋4を溶湯が所定量汲み上げられる深さまで溶湯炉2内に降下浸漬させる。このとき取鍋4の背側を俯角傾動させて背側開口縁が湯面より下方に位置するよう溶湯炉2に浸漬させる。この俯角は汲み上げ時間を短縮するためには溶湯を流出させる際の傾動俯角より大きくすることが好ましい。
【0028】
このようにして所定量の溶湯が取鍋4に汲み上げられたら、回動軸5bは制御機構により設定された角度回動して、取鍋4を予め設定された俯角に傾動させたうえロボットアーム5を少し上昇させて背側の開口縁を溶湯より高くすれば、取鍋4内の溶湯は傾動俯角により流出されることとなる。そして、傾動俯角分取鍋4内の溶湯が流出されたとき残留している溶湯は注湯量と略等しくなる。
【0029】
次いで、ロボットアーム5を上昇させ、取鍋4を溶湯炉2より引き上げて溶湯を汲み上げた取鍋4の重量をロードセル6により計測する。計測重量値から取鍋4とツールチャック7の重量分を減算して、取鍋4内の溶湯重量を算出して予め設定されているダイカスト成形機3への注湯量と同じであるかの比較を行う。
【0030】
このとき注湯量と同じであれば取鍋4をダイカスト成形機3に搬送して注湯を行う。そして、溶湯量が注湯量より少なかった場合、制御機構は不足分量に応じて回動軸5bの回動角を再設定し、取鍋4の俯角を1°単位で減少させて不足分の溶湯が取鍋4より流出しないようにする。また、溶湯量が注湯量より多かった場合、制御機構は超過分量に応じて回動軸5bの回動角を再設定し、取鍋4の俯角を1°単位で増加させて超過分の溶湯が取鍋4より流出するようにする。
【0031】
そして、再びロボットアーム5により取鍋4を持ち上げ、再度ロードセル6により溶湯重量を測定する。誤差が基準値以内であれば、ロボットアーム5により取鍋4をダイカスト成形機3の注湯口3aまで移送させる。
【0032】
溶湯を汲んだ取鍋4の移送時、装置が緊急停止信号を発した場合、制御機構は取鍋4の移送処理が完了するまでロボットアーム5の駆動機構を停止させないようにするか、取鍋4内の溶湯が慣性で飛び出ない減速度でロボットアーム5を停止させるよう駆動機構を制御機構で制御することにより、取鍋4から溶湯が溢れ出ることを防止する。
【0033】
そして、トラブルの復旧後、装置を再起動するものであるが、取鍋4に溶湯を貯留したまま停止させた場合は、取鍋4をツール交換ステーション40に旋回移動させて、ロック機構9を解除して、取鍋4を取鍋保持ブラケット42に支持させ、取鍋4内の溶湯の除去作業を行なう。
【0034】
また、緊急停止信号が発せられない場合は、ダイカスト成形機3の注湯口3aまで移送された取鍋4は回動軸5bにより最大俯角になるよう回動され、取鍋4に貯留されている溶湯を全量一気に流し込む。このような急速注湯が行われることにより溶湯は温度低下を起こすことなく最適な温度で注湯されるので、成形不良の発生を減少できる。
【0035】
また、必要に応じて溶湯炉2の湯面に浮かぶノロを除去する場合は、ロボットアーム5をツール交換ステーション40に旋回移動させて、ロック機構9を解除して、取鍋4を取鍋保持ブラケット42に支持させる。そして、ツールチャック7に図示しないノロ掻き棒等をチャックさせたうえ、ロボットアーム5を溶湯汲み上げステーションまで旋回移動させてツールチャック7にチャックされたノロ掻き棒で湯面のノロ除去を行う。
【符号の説明】
【0036】
1 給湯装置
2 溶湯炉
3 ダイカスト成形機
3a 注湯口
4 取鍋
4a 取付孔
4b 注ぎ口
5 ロボットアーム
5a ヘッド
5b 回動軸
6 ロードセル
7 ツールチャック
7a 取付孔
8 ブラケット
8a チャック用ピン
8b 抜け止めピン
9 ロック機構
10 ロックピン
10a フランジ
11 解除機構
11a ストッパ
11b リニアスライダ
12 レベルセンサ
40 ツール交換ステーション
41 ターンテーブル
42 取鍋保持ブラケット
【技術分野】
【0001】
本発明は各種鋳造において注湯量分の鉄やアルミニウム等の溶湯を型に注湯する給湯装置及びその方法に関するものである。
【背景技術】
【0002】
従来、鋳型に注湯する溶湯量は鋳型を載置した台車を持ち上げて重量を計量器で計量するものがある(例えば、特許文献1参照)。また、溶湯を入れた取鍋の重量を測定する力センサをハンドと取鍋の間に設けて残りの溶湯重量を計測するとともに、溶湯の流れ状態を監視するカメラと、押湯の上昇を検出する距離センサとを設けたものがある(例えば、特許文献2参照)。
【0003】
しかし、特許文献1のものは鋳型と台車を持ち上げて計量するため装置が大掛かりなるという問題があるうえに、台車の位置決めを高精度で行なえないため、注湯時には作業員による確認が必要となる問題がある。また、特許文献2のものは、力センサの他にカメラや距離センサを協働させて注湯を行うためシステムのチューニングが難しいという問題がある。さらに、特許文献1、2のいずれも注湯量を確認しながら注湯を行うため注湯に時間がかかり生産性を高められないうえに、取鍋に貯留されている溶湯により注湯を繰り返すため最後の注湯を完了するまでに時間がかかって溶湯の温度が低下し成形不良を生じることがあるいう問題がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−90616号公報
【特許文献2】特開平8−168871号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は注湯量分を高精度に汲み上げて全量を一気に注湯することにより、注湯時間を短縮して生産性を向上させることができるうえに成形不良を生じにくい給湯装置及びその方法を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
本発明は、少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアームを設けるとともに、該ロボットアームに溶湯炉から溶湯を汲み上げて鋳型に注湯する取鍋を取り付けた給湯装置であって、取鍋で汲み上げられた溶湯を流出させて注湯量と一致するよう取鍋を俯角傾動させる回動角度調整自在な回動軸をロボットアームに取り付けるとともに、注湯量に応じて回動軸の回動角度を制御する制御機構を設けた給湯装置及び少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアームに取り付けられる取鍋により溶湯を汲み上げて鋳型に注湯する給湯方法であって、前記ロボットアームに支持された取鍋を溶湯炉内に浸漬させて溶湯を汲み上げたうえ、ロボットアームの先端に設けた回動角度調整自在な回動軸により取鍋を一定の俯角度に傾動させて取鍋内の溶湯を俯角度分流出させて溶湯量を注湯量と一致させる給湯方法である。
【0007】
なお、給湯装置において、鉛直線が取鍋の重心を通る重量測定用のロードセルを回転軸に取り付けたり、制御機構に、溶湯を汲み上げた取鍋を移送中に緊急停止信号が入力された時、ロボットアームの移送処理が完了までロボットアームの駆動機構を停止しないように制御する機能を組み込んだり、ロボットアームに緊急停止信号が入力されたとき、取鍋から溶湯がこぼれない減速度となるよう回生抵抗をロボットアームの駆動機構に設けたり、回転軸に取鍋着脱用のツールチャックを取り付けたりしてもよい。
【発明の効果】
【0008】
本発明は、少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアームを設けるとともに、該ロボットアームに溶湯炉から溶湯を汲み上げて鋳型に注湯する取鍋を取り付けた給湯装置であって、取鍋で汲み上げられた溶湯を流出させて注湯量と一致するよう取鍋を俯角傾動させる回動角度調整自在な回動軸をロボットアームに取り付けるとともに、注湯量に応じて回動軸の回動角度を制御する制御機構を設けたことを特徴とする給湯装置であって、前記ロボットアームに支持された取鍋を溶湯炉内に浸漬させて溶湯を汲み上げたうえ、ロボットアームの先端に設けた回動角度調整自在な回動軸により取鍋を一定の俯角度に傾動させて取鍋内の溶湯を俯角度分流出させて溶湯量を注湯量と一致させることにより、取鍋内の溶湯量は高精度で注湯量分とすることができるので、取鍋内の溶湯をダイカスト成形機の供給口から一気に流し込むことができるので、注湯は短時間で完了しダイカスト成形機の稼働率を向上でき生産性を高めることができる。しかも、注湯は取鍋に貯留された溶湯を全量使用するため、溶湯は成形に最適な温度領域で注湯しているので成形不良の発生を減少できる。
【0009】
請求項2のように、鉛直線が取鍋の重心を通る重量測定用のロードセルを回転軸に取り付けることにより、溶湯量が注湯量と一致しているか正確に確認することができる。
【0010】
請求項3のように、制御機構に、溶湯を汲み上げた取鍋を移送中に緊急停止信号が入力された時、ロボットアームの移送処理が完了までロボットアームの駆動機構を停止しないように制御する機能を組み込むことにより、ロボットアームは緊急停止されず、取鍋の移送処理が完了した後に停止されるので、取鍋内の溶湯が反動で溢れ出ることがなく、溢れ出た溶湯の除去作業によりダイカスト成形を停止する必要がないので、稼働率の低下がなく生産性の向上を図ることができる。
【0011】
請求項4のように、ロボットアームに緊急停止信号が入力されたとき、取鍋から溶湯がこぼれない減速度となるよう回生抵抗をロボットアームの駆動機構に設けたことにより、ロボットアームは取鍋内の溶湯が溢れ出ることのない減速度で停止されるので、取鍋内の溶湯が反動で溢れ出ることがない。
【0012】
請求項5のように、回転軸に取鍋着脱用のツールチャックを取り付けることにより、
ツールチャックから取鍋を外して、ツールチャックに他のツールを取り付けることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の好ましい実施形態を示す平面図である。
【図2】同じく溶湯の汲み出し状態を示す斜視図である。
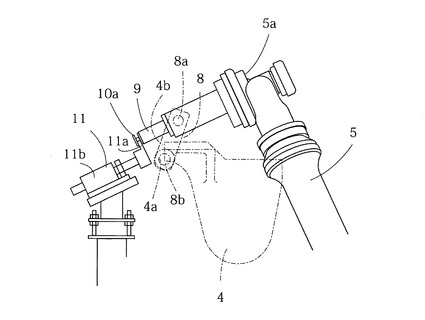
【図3】同じく要部を拡大して示す斜視図である。
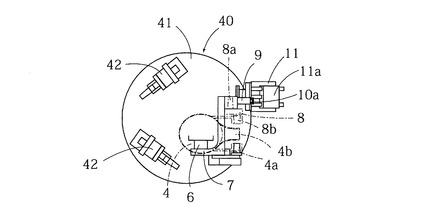
【図4】ツール交換ステーションを示す平面図である。
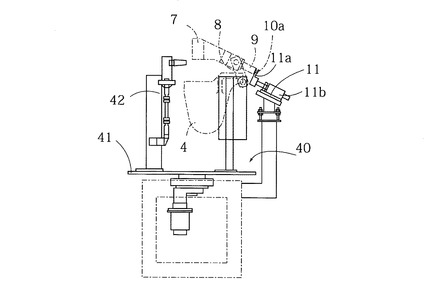
【図5】同じく側面図である。
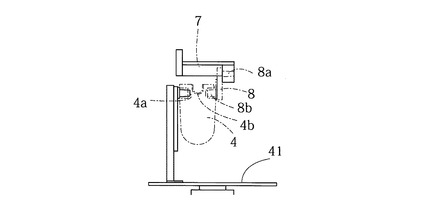
【図6】同じく正面図である。
【図7】同じくツールチャックのロック解除を示す側面図である。
【図8】同じく平面図である。
【発明を実施するための形態】
【0014】
次に、本発明の給湯装置をダイカスト成形装置に用いた実施形態を図に基づいて詳細に説明する。
1は溶湯炉2から溶湯を汲み上げてダイカスト成形機3に注湯する給湯装置であり、該給湯装置1には溶湯炉2からの溶湯の汲み上げステーションとダイカスト成形機3への注湯ステーション及び取鍋4の脱着を行うツール交換ステーション40間を旋回移動するロボットアーム5が設けられている。該ロボットアーム5は取鍋4の移送時に緊急停止時信号が検出されたとき、移送処理が完了するまでロボットアーム5の駆動機構を停止させないようにしたり、取鍋4内の溶湯が慣性で飛び出ない減速度でロボットアーム5を停止させるよう駆動機構を後記の制御機構で制御したりする。
【0015】
ロボットアーム5の駆動機構の停止の遅延動作は、ロボットアーム5で溶湯を移送中に緊急停止信号が装置に入力された場合、制御機構はロボットアーム5が溶湯の移送ステップを完了して停止動作を行なうまでロボットアーム5の駆動機構を停止させないようにプログラム制御する。
【0016】
また、ロボットアーム5の一定減速度での停止は、ロボットアーム5の駆動機構に組み込まれた回生ブレーキの回生抵抗を溶湯が取鍋4から溢れ出ない減速度となるように変更することにより行なう。
【0017】
また、ロボットアーム5のヘッド5aには回動角度調整自在な回動軸5bが設けられている。該回動軸5bは1°単位で回動角を変えて回動軸5bに取り付けられる取鍋4の傾動角度を調整自在としている。取鍋4を水平から1°俯角させた場合に流出される溶湯量は決まっているので、注湯量に応じて取鍋4の傾動俯角はロボットアーム5のコントローラに組み込まれた制御機構により演算され、回動軸5bの回動角度を制御している。
【0018】
また、前記制御機構は取鍋4による溶湯の汲み上げ後、回動軸5bに取り付けられている重量測定用のロードセル6により取鍋重量と溶湯重量が含まれる総重量を測定し、総重量から取鍋重量を減算して溶湯重量を演算算出し、該溶湯重量とダイカスト成形機3に注湯される規定量との差を算出し、許容範囲内であればダイカスト成形機3への注湯を行う。なお、ロードセル6はその鉛直線上に取鍋の重心が位置するように回転軸に取り付けられているので、取鍋内の溶湯量を正確に計測することができる
【0019】
そして、溶湯が少ない場合は、取鍋4を再度溶湯炉2内に浸漬させて溶湯の再汲み上げをし、算出された不足分量に基づいて取鍋4の俯角度を上向きに調整し溶湯の流出量を減少させて注湯量と一致させる。また、溶湯が多い場合は、算出された超過分量に基づいて取鍋4の俯角度を下向きに調整し溶湯の流出量を増加させて注湯量と一致させる。
【0020】
また、前記ロードセル6には取鍋4を着脱自在に取り付ける略L形のツールチャック7が取り付けられており、該ツールチャック7には取鍋4に取り付けられたブラケット8のチャック用ピン8aを着脱自在に嵌合させる取付孔7aが形成されている。
【0021】
9はツールチャック7には前記取付孔7aに嵌合されるチャック用ピン8aを抜け止めするロック機構であり、該ロック機構9はチャック用ピン8aに直交する方向から嵌合されるばねに付勢されたフランジ10a付きのロックピン10を設けたもので、該ロックピン10は外部に張出されているフランジ10aを解除機構11のストッパ11aに係止させばね力に抗して引っ張りチャック用ピン8aを抜き出すことによりツールチャック7のロックは解除され、取鍋4はロボットアーム5から取り外すことができる。
【0022】
また、前記ブラケット8の他端には取鍋4に形成された取付孔4aに嵌合固定される固定ピン8bが形成されている。また、取鍋4の取付孔4aは取鍋4の注ぎ口4bの両側に配設されている。
【0023】
前記解除機構11はツール交換ステーション40に隣接して設けられるものであり、該解除機構11はロックピン10のフランジ10aを係止させるストッパ11aと、該ストッパ11aを進退動させるリニアスライダ11bとからなり、ロックピン10のストッパ11aへの係止はロボットアーム5により行う。
【0024】
また、前記ツール交換ステーション40はロボットアームの旋回内のターンテーブル41上に取鍋保持ブラケット42を複数立設させたものであり、取鍋4の使われていない取付孔4aに取鍋保持ブラケット42の係止ピンを嵌合させて保持させたうえ、前記解除機構11により取鍋4をツールチャック7から外すことにより取鍋4はロボットアーム5から取鍋保持ブラケット42に移行される。なお、取鍋4を取り付ける場合は前記と逆の操作を行えばよい。このようにして取鍋4を取り外したツールチャック7には例えば、溶湯炉2の湯面掻き棒等をチャックして溶湯炉2の湯面に浮いているノロを除去する。
【0025】
12は溶湯炉2の湯面を検出するレベルセンサであり、該レベルセンサ12で検出された湯面高さに基づいて、溶湯炉2内の溶湯量を確認し取鍋4の溶湯炉2内への浸漬深さを決定し、取鍋4に所定量の溶湯が汲み上げられるようにするとともに、取鍋4を浸漬させても溶湯を所定量汲み上げることができない湯面高さの場合、溶湯の汲み上げを中止し取鍋4が溶湯炉2の底面と衝突して破損することがないようにしている。また、レベルセンサは取鍋による溶湯の汲み上げ回数が確認でき、取鍋により汲み上げられる溶湯量が不足することを防止できる。
【0026】
このような給湯装置1は、先ず、ツール交換ステーション40で取鍋保持ブラケット42に保持されている待機中の取鍋4をロボットアーム5のツールチャック7に取り付ける。そして、ツールチャック7に取鍋4が取り付けられたら、ロボットアーム5は取鍋4を溶湯炉2まで搬送移動させる。
【0027】
溶湯炉2ではレベルセンサ12で湯面高さが検出されているので、湯面高さに基づいて取鍋4を溶湯が所定量汲み上げられる深さまで溶湯炉2内に降下浸漬させる。このとき取鍋4の背側を俯角傾動させて背側開口縁が湯面より下方に位置するよう溶湯炉2に浸漬させる。この俯角は汲み上げ時間を短縮するためには溶湯を流出させる際の傾動俯角より大きくすることが好ましい。
【0028】
このようにして所定量の溶湯が取鍋4に汲み上げられたら、回動軸5bは制御機構により設定された角度回動して、取鍋4を予め設定された俯角に傾動させたうえロボットアーム5を少し上昇させて背側の開口縁を溶湯より高くすれば、取鍋4内の溶湯は傾動俯角により流出されることとなる。そして、傾動俯角分取鍋4内の溶湯が流出されたとき残留している溶湯は注湯量と略等しくなる。
【0029】
次いで、ロボットアーム5を上昇させ、取鍋4を溶湯炉2より引き上げて溶湯を汲み上げた取鍋4の重量をロードセル6により計測する。計測重量値から取鍋4とツールチャック7の重量分を減算して、取鍋4内の溶湯重量を算出して予め設定されているダイカスト成形機3への注湯量と同じであるかの比較を行う。
【0030】
このとき注湯量と同じであれば取鍋4をダイカスト成形機3に搬送して注湯を行う。そして、溶湯量が注湯量より少なかった場合、制御機構は不足分量に応じて回動軸5bの回動角を再設定し、取鍋4の俯角を1°単位で減少させて不足分の溶湯が取鍋4より流出しないようにする。また、溶湯量が注湯量より多かった場合、制御機構は超過分量に応じて回動軸5bの回動角を再設定し、取鍋4の俯角を1°単位で増加させて超過分の溶湯が取鍋4より流出するようにする。
【0031】
そして、再びロボットアーム5により取鍋4を持ち上げ、再度ロードセル6により溶湯重量を測定する。誤差が基準値以内であれば、ロボットアーム5により取鍋4をダイカスト成形機3の注湯口3aまで移送させる。
【0032】
溶湯を汲んだ取鍋4の移送時、装置が緊急停止信号を発した場合、制御機構は取鍋4の移送処理が完了するまでロボットアーム5の駆動機構を停止させないようにするか、取鍋4内の溶湯が慣性で飛び出ない減速度でロボットアーム5を停止させるよう駆動機構を制御機構で制御することにより、取鍋4から溶湯が溢れ出ることを防止する。
【0033】
そして、トラブルの復旧後、装置を再起動するものであるが、取鍋4に溶湯を貯留したまま停止させた場合は、取鍋4をツール交換ステーション40に旋回移動させて、ロック機構9を解除して、取鍋4を取鍋保持ブラケット42に支持させ、取鍋4内の溶湯の除去作業を行なう。
【0034】
また、緊急停止信号が発せられない場合は、ダイカスト成形機3の注湯口3aまで移送された取鍋4は回動軸5bにより最大俯角になるよう回動され、取鍋4に貯留されている溶湯を全量一気に流し込む。このような急速注湯が行われることにより溶湯は温度低下を起こすことなく最適な温度で注湯されるので、成形不良の発生を減少できる。
【0035】
また、必要に応じて溶湯炉2の湯面に浮かぶノロを除去する場合は、ロボットアーム5をツール交換ステーション40に旋回移動させて、ロック機構9を解除して、取鍋4を取鍋保持ブラケット42に支持させる。そして、ツールチャック7に図示しないノロ掻き棒等をチャックさせたうえ、ロボットアーム5を溶湯汲み上げステーションまで旋回移動させてツールチャック7にチャックされたノロ掻き棒で湯面のノロ除去を行う。
【符号の説明】
【0036】
1 給湯装置
2 溶湯炉
3 ダイカスト成形機
3a 注湯口
4 取鍋
4a 取付孔
4b 注ぎ口
5 ロボットアーム
5a ヘッド
5b 回動軸
6 ロードセル
7 ツールチャック
7a 取付孔
8 ブラケット
8a チャック用ピン
8b 抜け止めピン
9 ロック機構
10 ロックピン
10a フランジ
11 解除機構
11a ストッパ
11b リニアスライダ
12 レベルセンサ
40 ツール交換ステーション
41 ターンテーブル
42 取鍋保持ブラケット
【特許請求の範囲】
【請求項1】
少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアームを設けるとともに、該ロボットアームに溶湯炉から溶湯を汲み上げて鋳型に注湯する取鍋を取り付けた給湯装置であって、取鍋で汲み上げられた溶湯を流出させて注湯量と一致するよう取鍋を俯角傾動させる回動角度調整自在な回動軸をロボットアームに取り付けるとともに、注湯量に応じて回動軸の回動角度を制御する制御機構を設けたことを特徴とする給湯装置。
【請求項2】
鉛直線が取鍋の重心を通る重量測定用のロードセルを回転軸に取り付けたことを特徴とする請求項1に記載の給湯装置。
【請求項3】
制御機構に、溶湯を汲み上げた取鍋を移送中に緊急停止信号が入力された時、ロボットアームの移送処理が完了までロボットアームの駆動機構を停止しないように制御する機能を組み込んだことを特徴とする請求項1または2に記載の給湯装置。
【請求項4】
ロボットアームに緊急停止信号が入力されたとき、取鍋から溶湯がこぼれない減速度となるよう回生抵抗をロボットアームの駆動機構に設けたことを特徴とする請求項1から3のいずれかに記載の給湯装置。
【請求項5】
回転軸に取鍋着脱用のツールチャックを取り付けたことを特徴とする請求項1から3のいずれかに記載の給湯装置。
【請求項6】
少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアームに取り付けられる取鍋により溶湯を汲み上げて鋳型に注湯する給湯方法であって、前記ロボットアームに支持された取鍋を溶湯炉内に浸漬させて溶湯を汲み上げたうえ、ロボットアームの先端に設けた回動角度調整自在な回動軸により取鍋を一定の俯角度に傾動させて取鍋内の溶湯を俯角度分流出させて溶湯量を注湯量と一致させることを特徴とする給湯方法。
【請求項1】
少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアームを設けるとともに、該ロボットアームに溶湯炉から溶湯を汲み上げて鋳型に注湯する取鍋を取り付けた給湯装置であって、取鍋で汲み上げられた溶湯を流出させて注湯量と一致するよう取鍋を俯角傾動させる回動角度調整自在な回動軸をロボットアームに取り付けるとともに、注湯量に応じて回動軸の回動角度を制御する制御機構を設けたことを特徴とする給湯装置。
【請求項2】
鉛直線が取鍋の重心を通る重量測定用のロードセルを回転軸に取り付けたことを特徴とする請求項1に記載の給湯装置。
【請求項3】
制御機構に、溶湯を汲み上げた取鍋を移送中に緊急停止信号が入力された時、ロボットアームの移送処理が完了までロボットアームの駆動機構を停止しないように制御する機能を組み込んだことを特徴とする請求項1または2に記載の給湯装置。
【請求項4】
ロボットアームに緊急停止信号が入力されたとき、取鍋から溶湯がこぼれない減速度となるよう回生抵抗をロボットアームの駆動機構に設けたことを特徴とする請求項1から3のいずれかに記載の給湯装置。
【請求項5】
回転軸に取鍋着脱用のツールチャックを取り付けたことを特徴とする請求項1から3のいずれかに記載の給湯装置。
【請求項6】
少なくとも溶湯汲みステーションと注湯ステーション間を旋回移動するロボットアームに取り付けられる取鍋により溶湯を汲み上げて鋳型に注湯する給湯方法であって、前記ロボットアームに支持された取鍋を溶湯炉内に浸漬させて溶湯を汲み上げたうえ、ロボットアームの先端に設けた回動角度調整自在な回動軸により取鍋を一定の俯角度に傾動させて取鍋内の溶湯を俯角度分流出させて溶湯量を注湯量と一致させることを特徴とする給湯方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−71317(P2012−71317A)
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2010−216476(P2010−216476)
【出願日】平成22年9月28日(2010.9.28)
【出願人】(393011038)菱栄エンジニアリング株式会社 (59)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成22年9月28日(2010.9.28)
【出願人】(393011038)菱栄エンジニアリング株式会社 (59)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]