
給電プラグロック装置
【課題】ロック部材の位置を計算で求めながらロック部材を駆動手段により動作させる場合、計算位置と現実位置との間に誤差を生じ難くすることができる給電プラグロック装置を提供する。
【解決手段】給電プラグロック装置のディスク38をロック位置/アンロック位置に移動させる際、まずは給電プラグロックモータ27を電流検知制御にて制御して、ディスク38を動作終端位置に向けて回転させる。ディスク38が節度機構48の節度ピース49に当接すると、ディスク38が節度ピース49にて負荷を受けて、モータ電流が閾値以上となり、電流検知制御が終了、つまり給電プラグロックモータ27が停止する。この後は、節度機構48の節度荷重でディスク38を押して、ディスク38を動作終端位置(ロック位置/アンロック位置)まで運ぶ。
【解決手段】給電プラグロック装置のディスク38をロック位置/アンロック位置に移動させる際、まずは給電プラグロックモータ27を電流検知制御にて制御して、ディスク38を動作終端位置に向けて回転させる。ディスク38が節度機構48の節度ピース49に当接すると、ディスク38が節度ピース49にて負荷を受けて、モータ電流が閾値以上となり、電流検知制御が終了、つまり給電プラグロックモータ27が停止する。この後は、節度機構48の節度荷重でディスク38を押して、ディスク38を動作終端位置(ロック位置/アンロック位置)まで運ぶ。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば車両等の物品に接続された給電プラグを物品にロックして、給電プラグの不正取り外しを防止する給電プラグロック装置に関する。
【背景技術】
【0002】
近年、環境問題への意識の高まりから、二酸化炭素の排出量の少ない車両として、例えばハイブリッド車や電気自動車等の普及が進んでいる。これら車両は、バッテリの電力でモータを回転させ、モータの駆動力により走行するものである。よって、長距離走行してバッテリ残量が減ると、その度にバッテリを充電しなくてはならない(特許文献1等参照)。
【0003】
ところで、バッテリ充電は、バッテリの構成要素である電池セルで化合物やイオンの電解反応を伴うため、充電時間が相対的に長くかかる現状がある。よって、バッテリ充電中、仮に車両から立ち去ってしまうと、その隙に第三者によって給電プラグを付け替えられるなどして、電力を盗電される可能性も否めない。従って、バッテリ充電可能な車両では、給電プラグを車両に接続した際、給電プラグが不正に車両から引き抜かれないようにロック装置を搭載することが検討されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−161898号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
この種の給電プラグロック装置としては、接続時の抜け止めとして給電プラグに設けられた揺動操作式の爪状の部材(通称、ロックアーム)を、インレット側の可動式のロックバーにて操作規制する形式が考案されている。この場合、ロックアームがインレットの突部に係止したとき、ロックバーがロックアームの上方に位置してロックアームの開き操作が制限されると、給電プラグがインレットにロックされる。また、この状態からロックバーがロックアームから離間すると、ロックがアンロックに切り換わる。
【0006】
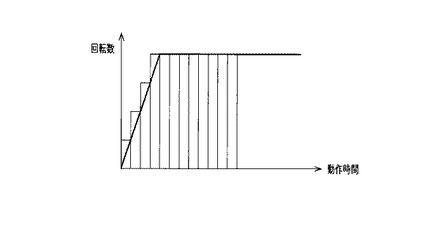
ロックバーをモータ等により行う電動式の場合、ロックバーを電流検知制御(電流検知方式)にて動作させる方式が考案されている。図8に示すように、電流検知制御は、例えばモータに流れる電流(負荷時電流値)を測定し、電流測定値からモータ回転数(負荷時回転数)を推測し、このモータ回転数によってロックバーの距離を積算する。そして、電流が閾値を継続して超えた時点で、ロックバーの移動距離が最小必要距離に到達していれば、正常位置で停動電流発生とし判定し、モータへの通電を停止する。この電流検知制御を用いれば、例えばセンサ類が不要となるので、装置体格を小型化することが可能となる。
【0007】
ここで、負荷時電流値から負荷時回転数を計算する式の中には、例えばモータの無負荷回転数と無負荷電流値とのパラメータがあり、これらには、モータが最も遅い条件(例えば雰囲気温度85度のとき)の値が代入されている。このように条件を設定するのは、現実はロック状態となっていないのに、計算はロックを完了していると判断してしまうことがよくないからである。
【0008】
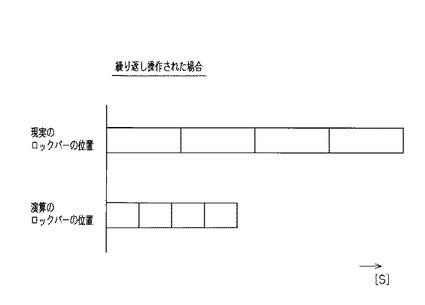
このとき、状況下が仮にモータが最も早い条件(例えば雰囲気温度−40度のとき)だった場合は、現実と計算のズレが大きく、図9に示すように、これがロックやロック/アンロックの繰り返し操作で累積していくと、現実はロックバーが動作終端位置に到達しているにもかかわらず、計算は動作終端位置に到達していないと判断し、例えばユーザに誤った通知(エラーの誤報)を行ってしまう可能性があった。
【0009】
本発明の目的は、ロック部材の位置を計算で求めながらロック部材を駆動手段により動作させる場合、計算位置と現実位置との間に誤差を生じ難くすることができる給電プラグロック装置を提供することにある。
【課題を解決するための手段】
【0010】
前記問題点を解決するために、本発明では、インレットに給電プラグが接続されたとき、前記インレット側のロック部材が前記給電プラグに係止することにより、前記給電プラグの不正取り外しを防止する給電プラグロック装置において、前記ロック部材を動作させる際の駆動源となる駆動手段と、前記駆動手段により前記ロック部材を動作終端位置の手前まで移動させ、このときの前記ロック部材の位置を演算して該位置を把握しておく制御手段と、前記駆動手段が停止した後、機械的な荷重で前記ロック部材を前記動作終端位置まで移動させる可動機構とを備え、前記可動機構が利くまでは前記ロック部材を前記制御にて動作させ、前記可動機構が利く状態となったとき、前記制御を終了して前記ロック部材を前記可動機構にて機械的に前記動作終端位置に運ぶことを要旨とする。
【0011】
本発明の構成によれば、ロック部材を動作終端位置(ロック位置やアンロック位置)に動かす際、まずは制御手段がロック部材の動作量(例えば移動距離)を計算しながらロック部材を所定の目的位置まで到達させ、目的位置到達後は可動機構によってロック部材を動作終端位置まで機械的に運ぶ。このように、ロック部材を機械的に運ぶようにすれば、ロック部材は強制的に動作終端位置まで運ばれるので、ロック部材は結果として動作終端位置に位置する。このため、制御手段が計算により求めた制御終了時におけるロック部材の位置(計算位置)が、結果として動作終端位置となるので、計算位置と現実位置とが一致する。よって、ロック部材の計算位置と現実位置とに誤差を生じ難くすることが可能となる。
【0012】
本発明では、前記可動機構は、付勢部材の付勢力により押された節度ピースの節度荷重にて前記ロック部材を移動させる節度機構により、前記ロック部材を前記動作終端位置まで移動させることを要旨とする。この構成によれば、可動機構を節度機構という簡素な構造としたので、給電プラグロック装置の構造が簡素化なもので済む。
【0013】
本発明では、前記制御手段は、前記駆動手段に流れる電流を測定し、該測定値から前記駆動手段の動作量を推測し、この推測値により前記ロック部材の移動距離を求め、前記電流が閾値を超えたとき、前記移動距離が最小必要距離に到達していれば、前記駆動手段の通電を停止する電流検知制御によって、前記駆動手段を制御することを要旨とする。この構成によれば、ロック部材の位置を検出するのに、センサ等の部品を使用せずに済むので、部品点数の削減や、装置体格を小型化することが可能となる。
【発明の効果】
【0014】
本発明によれば、ロック部材の位置を計算で求めながらロック部材を駆動手段により動作させる場合、計算位置と現実位置との間に誤差を生じ難くすることができる。
【図面の簡単な説明】
【0015】
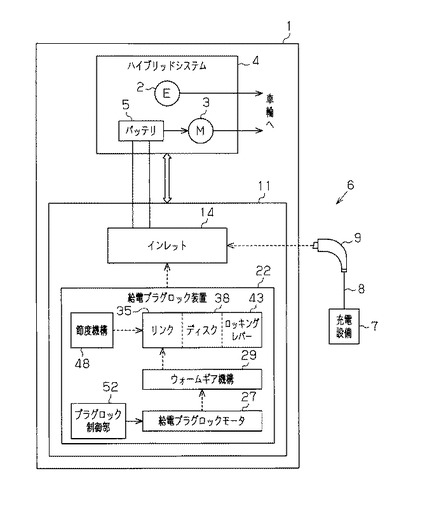
【図1】一実施形態の給電プラグロック装置のブロック図。
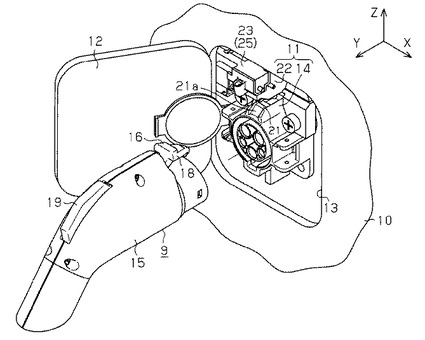
【図2】給電プラグをインレットに接続するときの外観を示す斜視図。
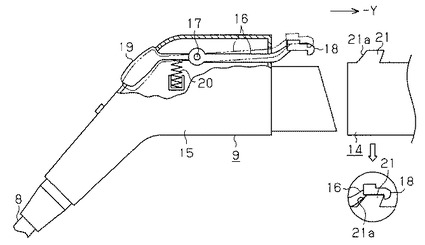
【図3】給電プラグをインレットに接続するときの外観を示す側面図。
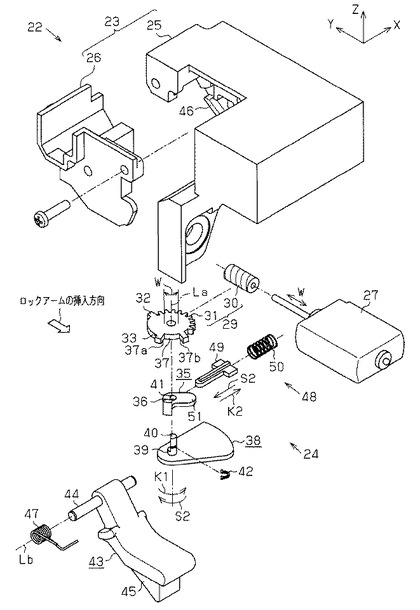
【図4】給電プラグロック装置の分解斜視図。
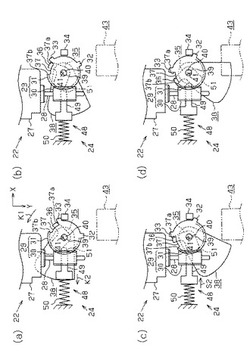
【図5】(a)〜(d)は給電プラグロック装置の動きを示す遷移図。
【図6】給電プラグが半嵌合した状態の模式図。
【図7】給電プラグロック装置の動作をまとめた関係図。
【図8】電流検知制御の概要を示すグラフ。
【図9】計算位置と現実位置とでズレが累積していく様子を示す概要図。
【発明を実施するための形態】
【0016】
以下、本発明を具体化した給電プラグロック装置の一実施形態を図1〜図7に従って説明する。
図1に示すように、ハイブリッド車(以下、単に車両1と記す)には、車輪を回す動力をエンジン2及びモータ3にて発生させるハイブリッドシステム4が設けられている。ハイブリッドシステム4には、モータ3の電源としてバッテリ5が設けられている。また、車両1には、外部電源にてバッテリ5を充電する充電システム6が設けられている。充電システム6は、例えば街の一角に設置された充電スタンドや住宅の商用電源などを充電設備7として、充電設備7の充電ケーブル8の先端に設けられた給電プラグ9を車両1に接続してバッテリ5を充電する。
【0017】
図1及び図2に示すように、車体10の側壁には、給電プラグ9の接続箇所として受電コネクタ11が設けられている。受電コネクタ11は、横開き式のリッド12によって開閉される収納室13に収納されている。受電コネクタ11には、電気接続端子(パワー端子、制御端子等)を有するインレット14が設けられている。
【0018】
図2及び図3に示すように、給電プラグ9は、充電システム6の電源側であって、インレット14に接続される電気接続端子が設けられている。給電プラグ9のプラグ本体15には、接続時の抜け止めとしてロックアーム16が揺動可能に取り付けられている。ロックアーム16は、長手方向中央を回動軸17として、長手方向と交差する方向に揺動する。ロックアーム16は、先端の爪部18と根元の操作部19とがプラグ本体15の外部に露出されている。ロックアーム16には、操作部19寄りの位置に、ロックアーム16を閉じ側に常時付勢する付勢部材20が設けられている。
【0019】
給電プラグ9を受電コネクタ11に接続する際には、給電プラグ9を受電コネクタ11へ挿入方向(図3の−Y軸方向)に真っ直ぐ挿し込む。このとき、爪部18がインレット14の突部21に当接すると、ロックアーム16は斜面21aに案内されて突部21を上る。そして、給電プラグ9がインレット14に完挿されると、付勢部材20の付勢力によってロックアーム16が閉じ側に揺動する。このため、爪部18が突部21に引っ掛かり、給電プラグ9がインレット14に抜け止めされる。ハイブリッドシステム4は、インレット14に給電プラグ9が完挿されたことを確認すると、給電プラグ9(充電設備7)にバッテリ5の充電を実行させる。
【0020】
充電終了後、給電プラグ9をインレット14から取り外す際には、操作部19を押してロックアーム16を開き側に揺動させ、突部21から離間させる。そして、この状態で給電プラグ9をインレット14から真っ直ぐ引き抜くことで、車両1から取り外す。
【0021】
図4及び図5に示すように、受電コネクタ11には、インレット14に接続された給電プラグ9の不正取り外しを防止する給電プラグロック装置22が設けられている。給電プラグロック装置22には、ケース23の内部に、給電プラグロック装置22の機構部分としてロック機構24が設けられている。本例のロック機構24は、ロック動作/アンロック動作を途中まではモータを駆動源に電動で行い、途中からモータではなく、機械部品の節度荷重にて機械的に実行するものである。
【0022】
ケース23は、ケース23の本体部分をなすロックボディ25と、ロックボディ25の開口を閉じるリッド26とからなる。ケース23の内部には、給電プラグロック装置22の駆動源として給電プラグロックモータ27が収納されている。給電プラグロックモータ27は、例えばDCモータが使用されるとともに、モータ軸28が装置奥行き幅方向(図4のY軸方向)を向くように配置されている。なお、給電プラグロックモータ27が駆動手段に相当する。
【0023】
モータ軸28には、給電プラグロックモータ27にて回るウォームギヤ機構29が連結されている。ウォームギヤ機構29は、モータ軸28に取り付けられたウォームギヤ30と、ウォームギヤ30と噛合するヘリカルギヤ31とからなる。ウォームギヤ機構29は、入力の回転を、方向を略90度変換して出力するギヤの一種である。ウォームギヤ機構29は、ヘリカルギヤ31側からウォームギヤ30を故意に回されることを防止する機能、いわゆるセルフロック機能を持つ。
【0024】
ヘリカルギヤ31の側壁には、ヘリカルギヤ31の回動位置を位置決めする一対の位置決め突32,33が突設されている。これら位置決め突32,33は、ヘリカルギヤ31をロック位置に位置決めするロック位置用位置決め突32と、ヘリカルギヤ31をアンロック位置に位置決めするアンロック位置用位置決め突33とからなる。これら位置決め突32,33は、ケース23の内部に設けられた図5に示すケース側位置決め突34に当接可能である。
【0025】
ヘリカルギヤ31には、略板状を呈するリンク35がヘリカルギヤ31の軸La回りに回動可能に連結されている。リンク35は、ヘリカルギヤ31に重ね配置されつつ、ヘリカルギヤ31に対し同一軸心位置に配置されている。リンク35の端縁には、装置高さ方向(図4のZ軸方向)に延びる係止突36が形成され、この係止突36がリンク35の側壁の係止溝37に係合されている。リンク35は、ヘリカルギヤ31の回動時、係止突36が係止溝37の内壁面37a,37bのいずれかと当接するとき、ヘリカルギヤ31と一体回動する。また、リンク35は、係止溝37の長さWだけ、ヘリカルギヤ31に対して相対回動可能でもある。なお、リンク35及び係止溝37が可動機構を構成する。
【0026】
リンク35には、ロックアーム16の操作を規制可能な略扇状のディスク38がリンク35と同期回動可能に連結されている。ディスク38の根元には、装置高さ方向(図4のZ軸方向)に延びる回動軸39が形成され、回動軸39の先端に英大文字D字状に形成された係止部40が、リンク35の中央部に同形状にて形成された取付孔41に係止されている。ディスク38は、Eリング42にてディスク38に抜け止めされている。なお、ディスク38がロック部材を構成する。リンク35及びディスク38は、ヘリカルギヤ31と同一軸心上で回転可能である。
【0027】
ケース23には、ディスク38と協同してロックアーム16を位置規制するロッキングレバー43が、装置奥行き方向に延びる軸部材44のLb回りに回動可能に取り付けられている。ディスク38の下部には、ロックアーム16の爪部18に当接可能な略三角形状のアーム当接部45が突設されている。アーム当接部45は、ケース23の底面に形成された開口部46から外部に露出し、給電プラグ9をインレット14に抜き挿しするとき、ロックアーム16に当接する。軸部材44には、ロッキングレバー43をロックアーム16側に常時付勢する付勢部材47が介装されている。なお、ロッキングレバー43がロック部材を構成する。
【0028】
本例のロック機構24は、ロック動作の際、給電プラグロックモータ27の一方向の回転によりヘリカルギヤ31の内壁面37aでリンク35の係止突36を押すことにより、リンク35及びディスク38をロック方向(図4の矢印K1方向)に回動させ、これらをロック途中位置まで移動させる。また、ロック機構24は、アンロック動作の際、給電プラグロックモータ27の他方向の回転によりヘリカルギヤ31の内壁面37bでリンク35の係止突36を押すことにより、リンク35及びディスク38をアンロック方向(図4の矢印S1方向)に回動させ、アンロック途中位置まで移動させる。
【0029】
ケース23には、ロック途中位置/アンロック途中位置まで到達したリンク35及びディスク38を、動作終端位置であるロック位置/アンロック位置まで、節度荷重によって機械的に回動させる節度機構48が設けられている。節度機構48には、リンク35を回動方向に押し込む節度ピース49と、節度ピース49をリンク35側に常時付勢する付勢部材50とが設けられている。節度ピース49は、平面視略T字状に形成されるとともに、先端が曲面状に形成されている。付勢部材50は、例えばコイルばねが使用されている。なお、節度機構48が可動機構を構成する。
【0030】
リンク35がアンロック位置からロック位置に向かって回動するとき、又はその逆方向に回動するとき、リンク35は曲面状の押込部51にて付勢部材50の付勢力に抗して節度ピース49を奥(図4の矢印K2方向)に押し込みながら回動する。そして、押込部51が節度ピース49を上り切ると、今度は付勢部材50の付勢力によって節度ピース49がリンク側(図4の矢印S2方向)に飛び出す動きをとり、節度ピース49が押込部51を押すことでリンク35及びディスク38がロック位置へ回動する。
【0031】
ディスク38がロック位置に到達してロッキングレバー43の上方に位置すると、ロッキングレバー43の上方への回動が規制される。このため、給電プラグロック装置22がロック状態をとる。一方、ディスク38がアンロック位置に到達してロッキングレバー43から離間すると、ロッキングレバー43の上方への回動が許容される。このため、給電プラグロック装置22がアンロック状態をとる。
【0032】
図1に示すように、給電プラグロック装置22には、給電プラグロック装置22のロック動作/アンロック動作を制御するプラグロック制御部52が設けられている。プラグロック制御部52は、例えばIC(Integrated Circuit)から構成されている。プラグロック制御部52は、給電プラグロックモータ27を制御してディスク38を回転させることにより、ロック状態/アンロック状態を切り換える。なお、プラグロック制御部52が制御手段に相当する。
【0033】
プラグロック制御部52は、給電プラグロックモータ27を電流検知制御にて制御することにより、ロック動作/アンロック動作を実行する。電流検知制御は、給電プラグロックモータ27に流れる電流を測定し、電流測定値からモータ回転数を推測し、このモータ回転数(推測値)によってディスク38(リンク35)の距離を積算する。そして、電流が閾値を継続して超えた時点で、ディスク38の移動距離が最小必要距離に到達していれば、正常位置で停動電流発生とし判定し、モータ通電を停止する。一方、電流が閾値を継続して超えた時点で、ディスク38の移動距離が最小必要距離に到達していなければ、異常位置で停動電流発生と判定し、規定時間通電した後、モータ通電を終了する。なお、モータ回転数が動作量に相当する。
【0034】
本例の場合、ロック動作/アンロック動作のとき、リンク35は節度ピース49を乗り上げようとする動きをとるので、このとき給電プラグロックモータ27に負荷がかかり、結果、給電プラグロックモータ27に流れる電流が大きくなる。よって、プラグロック制御部52は、この時点で給電プラグロックモータ27に流れる電流が閾値以上となることを確認してモータ通電を停止し、以降のリンク35及びディスク38の回動を節度機構48の節度荷重にて実行させることにより、ディスク38をロック位置/アンロックに位置させる。
【0035】
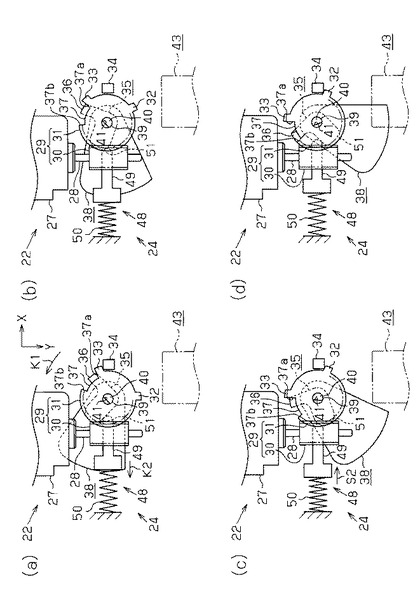
次に、本例の給電プラグロック装置22の動作を、図5を用いて説明する。
給電プラグロック装置22が図5(a)に示すアンロック状態のとき、プラグロック制御部52はロックトリガを入力すると、給電プラグロックモータ27を一方向に回転(例えば正転)させ、ロック動作を開始する。このとき、ヘリカルギヤ31がロック方向(図5(a)の矢印K1方向)に回動し、ヘリカルギヤ31の内壁面37aがリンク35の係止突36を後から押すことにより、ヘリカルギヤ31とリンク35とディスク38とが一体となってロック方向に回動する。また、リンク35の押込部51が節度ピース49を押し、節度ピース49が奥方向(図5(a)の矢印K2方向)に直線移動する。
【0036】
図5(b)に示すように、ロック動作時、リンク35が節度ピース49を上り切ろうとするとき(又は上り切ったとき)、給電プラグロックモータ27に最も大きな負荷がかかるので、給電プラグロックモータ27に流れる電流が大きくなる。このため、プラグロック制御部52は、電流が閾値以上となることを確認し、この時点で給電プラグロックモータ27の通電を停止する。なお、この後、リンク35は慣性力で回転を継続する。
【0037】
図5(c)に示すように、リンク35が節度ピース49を上り切ったとき、ヘリカルギヤ31のロック位置用位置決め突32がケース側位置決め突34に当たり、ヘリカルギヤ31のそれ以上の回動が規制される。よって、この時点でヘリカルギヤ31は回動できなくなり、これ以降はリンク35及びディスク38のみがロック方向へ回動可能となる。
【0038】
また、リンク35が節度ピース49を上り切ると、今度は節度ピース49が付勢部材50の付勢力にてリンク35を後から押す動作をとり、節度ピース49が手前側(図5(c)の矢印K2方向)に直線移動する。つまり、電流検知制御による給電プラグロックモータ27の停止後は、節度機構48の節度荷重にてリンク35及びディスク38のロック位置への回動が継続される。このとき、リンク35及びディスク38は、係止溝37の長さWだけ、ロック方向に回動する動きをとる。
【0039】
そして、図5(d)に示すように、リンク35の係止突36が、ヘリカルギヤ31の係止溝37の内壁面37bに当接すると、リンク35及びディスク38の回動が停止する。このとき、ディスク38はロッキングレバー43の上方に位置し、ロッキングレバー43の回動を規制することで、インレット14に突部21に係止されたロックアーム16の開き操作を制限する。よって、給電プラグロック装置22がロック状態となり、給電プラグ9がインレット14に固定される。
【0040】
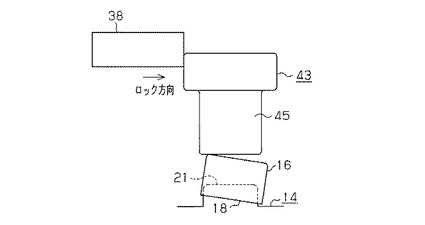
ところで、図6に示すように、ロックアーム16がインレット14の突部21に係止したとき、例えば爪部18の噛み合わせが悪いときなどは、爪部18が所定量浮いて突部21に係止する状態、いわゆる半嵌合をとるときもある。この状況下では、浮いたロックアーム16にてロッキングレバー43が上方に所定量回動した状態となるので、ディスク38の移動経路上にロッキングレバー43が飛び出してしまう。よって、ディスク38がロック方向に回動するとき、飛び出たロッキングレバー43の壁にディスク38が衝突してしまい、ディスク38はロック位置の手前で回動が止まってしまうことになる。
【0041】
この場合、例えばロックアーム16を上下左右に動かして噛み合いを正せば、爪部18は下がって正常位置をとり、ロッキングレバー43も付勢部材47の付勢力で下側に回動する。よって、この後は、節度荷重によってリンク35及びディスク38がロック方向への回動を再開し、ロック位置に到達することになる。つまり、半嵌合が生じていても、ロックアーム16の噛み合いを正せば、節度機構48によってディスク38を正常なロック位置まで回動させることが可能である。なお、アンロック動作は、ロック動作と動作原理が基本的に同じであるので、説明は省略する。
【0042】
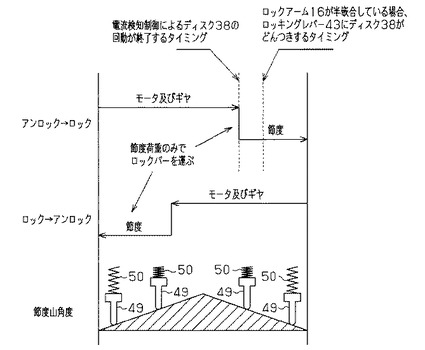
以上により、本例においては、図7に示すように、最初は給電プラグロックモータ27を電流検知制御により動作させる制御にてディスク38を回動させ、電流検知制御で給電プラグロックモータ27が停止した後は、節度機構48の節度荷重によりディスク38を動作終端位置のロック位置/アンロック位置まで運ぶ。つまり、本例の場合は、半嵌合時にディスク38がロッキングレバー43にどんつきするタイミングよりも、電流検知制御によるディスク38の回動を終了するタイミングを早く設定している。
【0043】
このため、本例は、電流検知制御終了後、ディスク38は強制的に動作終端位置まで運ばれるので、ディスク38は結果として動作終端位置に位置することになる。よって、プラグロック制御部52が計算にて求めた位置(動作終了の判定位置)と、ディスク38の現実位置とを一致させることが可能となる。従って、プラグロック制御部52が求めたディスク38の計算位置と現実位置との間に誤差を生じ難くすることが可能となる。このため、仮にロック動作が繰り返されたり、ロック/アンロックの繰り返しが実行されたりしても、距離のズレが蓄積されずに済むので、ディスク38の位置の誤判定が生じ難くなる。
【0044】
また、仮にディスク38がロックアーム16に半嵌合する状態をとっていても、例えばロックアーム16を位置直しするなどして半嵌合が解消されれば、節度機構48の節度荷重によって、ディスク38をロック位置まで動かすことが可能となる。よって、給電プラグロック装置22がロック動作を実行したにもかかわらず、ロック状態に移行できないまま放置されてしまうことを防止することも可能となる。
【0045】
本実施形態の構成によれば、以下に記載の効果を得ることができる。
(1)給電プラグロックモータ27を電流検知制御することによりディスク38を動作終端位置(ロック位置、アンロック位置)の手前まで送り、その位置から動作終端位置までは節度機構48の節度荷重にてディスク38を機械的に運ぶ。よって、プラグロック制御部52が計算により求めるディスク38の位置と現実位置とが一致、つまりイニシャライズ(初期化)されるので、計算位置と現実位置との間に誤差を生じ難くすることができる。
【0046】
(2)ディスク38がロックアーム16に半嵌合していても、半嵌合が解消されれば、節度機構48の節度荷重によってディスク38をロック位置に位置させることができる。よって、ロック動作の動作確実性を確保することがきる。
【0047】
(3)給電プラグロックモータ27ではディスク38を途中位置まで運ぶだけでよい。よって、給電プラグロックモータ27の通電時間が短く済むので、省電力とすることができる。
【0048】
なお、実施形態はこれまでに述べた構成に限らず、以下の態様に変更してもよい。
・ディスク38を途中位置まで運ぶときに使用する制御は、電流検知制御に限定されない。例えば、タイマ制御を使用し、タイマがタイムアップするまでモータ通電して、ディスク38を所定位置まで回動させるものでもよい。
【0049】
・モータの動作トリガ(ロックトリガ、アンロックトリガ)は、例えば車両のドアロック連動とする場合、ドアロックモータに流れる電流(電圧)でもよいし、専用の操作手段が操作されたときに出力されるスイッチ信号でもよい。
【0050】
・ロック部材は、回転式に限らず、直線方向にスライド移動する直線式としてもよい。
・ロック機構24は、実施形態に述べた例に限らず、適宜変更可能である。例えば、ディスク38が直にロックアーム16の開き操作を規制するものでもよい。
【0051】
・ロック機構24は、ロック部材が給電プラグ9の孔に挿し込まれてロック状態をとるものでもよい。
・駆動手段は、モータに限らず、例えばソレノイドを使用してもよい。
【0052】
・可動機構は、節度機構48に限定されず、他の機械的な機構を用いてもよい。
・本例の思想は、ロック側及びアンロック側の少なくともいずれかに採用されていればよい。
【0053】
・車両1は、ハイブリッド車に限定されず、例えばモータのみで走行する電気自動車でもよい。
・給電プラグロック装置22は、車両1に適用されることに限らず、他の装置や機器に応用してもよい。
【符号の説明】
【0054】
9…給電プラグ、14…インレット、22…給電プラグロック装置、27…駆動手段としての給電プラグロックモータ、35…可動機構を構成するリンク、37…可動機構を構成する係止溝、38…ロック部材を構成するディスク、43…ロック部材を構成するロッキングレバー、48…可動機構を構成する節度機構、49…節度ピース、50…付勢部材、52…制御手段としてのプラグロック制御部。
【技術分野】
【0001】
本発明は、例えば車両等の物品に接続された給電プラグを物品にロックして、給電プラグの不正取り外しを防止する給電プラグロック装置に関する。
【背景技術】
【0002】
近年、環境問題への意識の高まりから、二酸化炭素の排出量の少ない車両として、例えばハイブリッド車や電気自動車等の普及が進んでいる。これら車両は、バッテリの電力でモータを回転させ、モータの駆動力により走行するものである。よって、長距離走行してバッテリ残量が減ると、その度にバッテリを充電しなくてはならない(特許文献1等参照)。
【0003】
ところで、バッテリ充電は、バッテリの構成要素である電池セルで化合物やイオンの電解反応を伴うため、充電時間が相対的に長くかかる現状がある。よって、バッテリ充電中、仮に車両から立ち去ってしまうと、その隙に第三者によって給電プラグを付け替えられるなどして、電力を盗電される可能性も否めない。従って、バッテリ充電可能な車両では、給電プラグを車両に接続した際、給電プラグが不正に車両から引き抜かれないようにロック装置を搭載することが検討されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−161898号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
この種の給電プラグロック装置としては、接続時の抜け止めとして給電プラグに設けられた揺動操作式の爪状の部材(通称、ロックアーム)を、インレット側の可動式のロックバーにて操作規制する形式が考案されている。この場合、ロックアームがインレットの突部に係止したとき、ロックバーがロックアームの上方に位置してロックアームの開き操作が制限されると、給電プラグがインレットにロックされる。また、この状態からロックバーがロックアームから離間すると、ロックがアンロックに切り換わる。
【0006】
ロックバーをモータ等により行う電動式の場合、ロックバーを電流検知制御(電流検知方式)にて動作させる方式が考案されている。図8に示すように、電流検知制御は、例えばモータに流れる電流(負荷時電流値)を測定し、電流測定値からモータ回転数(負荷時回転数)を推測し、このモータ回転数によってロックバーの距離を積算する。そして、電流が閾値を継続して超えた時点で、ロックバーの移動距離が最小必要距離に到達していれば、正常位置で停動電流発生とし判定し、モータへの通電を停止する。この電流検知制御を用いれば、例えばセンサ類が不要となるので、装置体格を小型化することが可能となる。
【0007】
ここで、負荷時電流値から負荷時回転数を計算する式の中には、例えばモータの無負荷回転数と無負荷電流値とのパラメータがあり、これらには、モータが最も遅い条件(例えば雰囲気温度85度のとき)の値が代入されている。このように条件を設定するのは、現実はロック状態となっていないのに、計算はロックを完了していると判断してしまうことがよくないからである。
【0008】
このとき、状況下が仮にモータが最も早い条件(例えば雰囲気温度−40度のとき)だった場合は、現実と計算のズレが大きく、図9に示すように、これがロックやロック/アンロックの繰り返し操作で累積していくと、現実はロックバーが動作終端位置に到達しているにもかかわらず、計算は動作終端位置に到達していないと判断し、例えばユーザに誤った通知(エラーの誤報)を行ってしまう可能性があった。
【0009】
本発明の目的は、ロック部材の位置を計算で求めながらロック部材を駆動手段により動作させる場合、計算位置と現実位置との間に誤差を生じ難くすることができる給電プラグロック装置を提供することにある。
【課題を解決するための手段】
【0010】
前記問題点を解決するために、本発明では、インレットに給電プラグが接続されたとき、前記インレット側のロック部材が前記給電プラグに係止することにより、前記給電プラグの不正取り外しを防止する給電プラグロック装置において、前記ロック部材を動作させる際の駆動源となる駆動手段と、前記駆動手段により前記ロック部材を動作終端位置の手前まで移動させ、このときの前記ロック部材の位置を演算して該位置を把握しておく制御手段と、前記駆動手段が停止した後、機械的な荷重で前記ロック部材を前記動作終端位置まで移動させる可動機構とを備え、前記可動機構が利くまでは前記ロック部材を前記制御にて動作させ、前記可動機構が利く状態となったとき、前記制御を終了して前記ロック部材を前記可動機構にて機械的に前記動作終端位置に運ぶことを要旨とする。
【0011】
本発明の構成によれば、ロック部材を動作終端位置(ロック位置やアンロック位置)に動かす際、まずは制御手段がロック部材の動作量(例えば移動距離)を計算しながらロック部材を所定の目的位置まで到達させ、目的位置到達後は可動機構によってロック部材を動作終端位置まで機械的に運ぶ。このように、ロック部材を機械的に運ぶようにすれば、ロック部材は強制的に動作終端位置まで運ばれるので、ロック部材は結果として動作終端位置に位置する。このため、制御手段が計算により求めた制御終了時におけるロック部材の位置(計算位置)が、結果として動作終端位置となるので、計算位置と現実位置とが一致する。よって、ロック部材の計算位置と現実位置とに誤差を生じ難くすることが可能となる。
【0012】
本発明では、前記可動機構は、付勢部材の付勢力により押された節度ピースの節度荷重にて前記ロック部材を移動させる節度機構により、前記ロック部材を前記動作終端位置まで移動させることを要旨とする。この構成によれば、可動機構を節度機構という簡素な構造としたので、給電プラグロック装置の構造が簡素化なもので済む。
【0013】
本発明では、前記制御手段は、前記駆動手段に流れる電流を測定し、該測定値から前記駆動手段の動作量を推測し、この推測値により前記ロック部材の移動距離を求め、前記電流が閾値を超えたとき、前記移動距離が最小必要距離に到達していれば、前記駆動手段の通電を停止する電流検知制御によって、前記駆動手段を制御することを要旨とする。この構成によれば、ロック部材の位置を検出するのに、センサ等の部品を使用せずに済むので、部品点数の削減や、装置体格を小型化することが可能となる。
【発明の効果】
【0014】
本発明によれば、ロック部材の位置を計算で求めながらロック部材を駆動手段により動作させる場合、計算位置と現実位置との間に誤差を生じ難くすることができる。
【図面の簡単な説明】
【0015】
【図1】一実施形態の給電プラグロック装置のブロック図。
【図2】給電プラグをインレットに接続するときの外観を示す斜視図。
【図3】給電プラグをインレットに接続するときの外観を示す側面図。
【図4】給電プラグロック装置の分解斜視図。
【図5】(a)〜(d)は給電プラグロック装置の動きを示す遷移図。
【図6】給電プラグが半嵌合した状態の模式図。
【図7】給電プラグロック装置の動作をまとめた関係図。
【図8】電流検知制御の概要を示すグラフ。
【図9】計算位置と現実位置とでズレが累積していく様子を示す概要図。
【発明を実施するための形態】
【0016】
以下、本発明を具体化した給電プラグロック装置の一実施形態を図1〜図7に従って説明する。
図1に示すように、ハイブリッド車(以下、単に車両1と記す)には、車輪を回す動力をエンジン2及びモータ3にて発生させるハイブリッドシステム4が設けられている。ハイブリッドシステム4には、モータ3の電源としてバッテリ5が設けられている。また、車両1には、外部電源にてバッテリ5を充電する充電システム6が設けられている。充電システム6は、例えば街の一角に設置された充電スタンドや住宅の商用電源などを充電設備7として、充電設備7の充電ケーブル8の先端に設けられた給電プラグ9を車両1に接続してバッテリ5を充電する。
【0017】
図1及び図2に示すように、車体10の側壁には、給電プラグ9の接続箇所として受電コネクタ11が設けられている。受電コネクタ11は、横開き式のリッド12によって開閉される収納室13に収納されている。受電コネクタ11には、電気接続端子(パワー端子、制御端子等)を有するインレット14が設けられている。
【0018】
図2及び図3に示すように、給電プラグ9は、充電システム6の電源側であって、インレット14に接続される電気接続端子が設けられている。給電プラグ9のプラグ本体15には、接続時の抜け止めとしてロックアーム16が揺動可能に取り付けられている。ロックアーム16は、長手方向中央を回動軸17として、長手方向と交差する方向に揺動する。ロックアーム16は、先端の爪部18と根元の操作部19とがプラグ本体15の外部に露出されている。ロックアーム16には、操作部19寄りの位置に、ロックアーム16を閉じ側に常時付勢する付勢部材20が設けられている。
【0019】
給電プラグ9を受電コネクタ11に接続する際には、給電プラグ9を受電コネクタ11へ挿入方向(図3の−Y軸方向)に真っ直ぐ挿し込む。このとき、爪部18がインレット14の突部21に当接すると、ロックアーム16は斜面21aに案内されて突部21を上る。そして、給電プラグ9がインレット14に完挿されると、付勢部材20の付勢力によってロックアーム16が閉じ側に揺動する。このため、爪部18が突部21に引っ掛かり、給電プラグ9がインレット14に抜け止めされる。ハイブリッドシステム4は、インレット14に給電プラグ9が完挿されたことを確認すると、給電プラグ9(充電設備7)にバッテリ5の充電を実行させる。
【0020】
充電終了後、給電プラグ9をインレット14から取り外す際には、操作部19を押してロックアーム16を開き側に揺動させ、突部21から離間させる。そして、この状態で給電プラグ9をインレット14から真っ直ぐ引き抜くことで、車両1から取り外す。
【0021】
図4及び図5に示すように、受電コネクタ11には、インレット14に接続された給電プラグ9の不正取り外しを防止する給電プラグロック装置22が設けられている。給電プラグロック装置22には、ケース23の内部に、給電プラグロック装置22の機構部分としてロック機構24が設けられている。本例のロック機構24は、ロック動作/アンロック動作を途中まではモータを駆動源に電動で行い、途中からモータではなく、機械部品の節度荷重にて機械的に実行するものである。
【0022】
ケース23は、ケース23の本体部分をなすロックボディ25と、ロックボディ25の開口を閉じるリッド26とからなる。ケース23の内部には、給電プラグロック装置22の駆動源として給電プラグロックモータ27が収納されている。給電プラグロックモータ27は、例えばDCモータが使用されるとともに、モータ軸28が装置奥行き幅方向(図4のY軸方向)を向くように配置されている。なお、給電プラグロックモータ27が駆動手段に相当する。
【0023】
モータ軸28には、給電プラグロックモータ27にて回るウォームギヤ機構29が連結されている。ウォームギヤ機構29は、モータ軸28に取り付けられたウォームギヤ30と、ウォームギヤ30と噛合するヘリカルギヤ31とからなる。ウォームギヤ機構29は、入力の回転を、方向を略90度変換して出力するギヤの一種である。ウォームギヤ機構29は、ヘリカルギヤ31側からウォームギヤ30を故意に回されることを防止する機能、いわゆるセルフロック機能を持つ。
【0024】
ヘリカルギヤ31の側壁には、ヘリカルギヤ31の回動位置を位置決めする一対の位置決め突32,33が突設されている。これら位置決め突32,33は、ヘリカルギヤ31をロック位置に位置決めするロック位置用位置決め突32と、ヘリカルギヤ31をアンロック位置に位置決めするアンロック位置用位置決め突33とからなる。これら位置決め突32,33は、ケース23の内部に設けられた図5に示すケース側位置決め突34に当接可能である。
【0025】
ヘリカルギヤ31には、略板状を呈するリンク35がヘリカルギヤ31の軸La回りに回動可能に連結されている。リンク35は、ヘリカルギヤ31に重ね配置されつつ、ヘリカルギヤ31に対し同一軸心位置に配置されている。リンク35の端縁には、装置高さ方向(図4のZ軸方向)に延びる係止突36が形成され、この係止突36がリンク35の側壁の係止溝37に係合されている。リンク35は、ヘリカルギヤ31の回動時、係止突36が係止溝37の内壁面37a,37bのいずれかと当接するとき、ヘリカルギヤ31と一体回動する。また、リンク35は、係止溝37の長さWだけ、ヘリカルギヤ31に対して相対回動可能でもある。なお、リンク35及び係止溝37が可動機構を構成する。
【0026】
リンク35には、ロックアーム16の操作を規制可能な略扇状のディスク38がリンク35と同期回動可能に連結されている。ディスク38の根元には、装置高さ方向(図4のZ軸方向)に延びる回動軸39が形成され、回動軸39の先端に英大文字D字状に形成された係止部40が、リンク35の中央部に同形状にて形成された取付孔41に係止されている。ディスク38は、Eリング42にてディスク38に抜け止めされている。なお、ディスク38がロック部材を構成する。リンク35及びディスク38は、ヘリカルギヤ31と同一軸心上で回転可能である。
【0027】
ケース23には、ディスク38と協同してロックアーム16を位置規制するロッキングレバー43が、装置奥行き方向に延びる軸部材44のLb回りに回動可能に取り付けられている。ディスク38の下部には、ロックアーム16の爪部18に当接可能な略三角形状のアーム当接部45が突設されている。アーム当接部45は、ケース23の底面に形成された開口部46から外部に露出し、給電プラグ9をインレット14に抜き挿しするとき、ロックアーム16に当接する。軸部材44には、ロッキングレバー43をロックアーム16側に常時付勢する付勢部材47が介装されている。なお、ロッキングレバー43がロック部材を構成する。
【0028】
本例のロック機構24は、ロック動作の際、給電プラグロックモータ27の一方向の回転によりヘリカルギヤ31の内壁面37aでリンク35の係止突36を押すことにより、リンク35及びディスク38をロック方向(図4の矢印K1方向)に回動させ、これらをロック途中位置まで移動させる。また、ロック機構24は、アンロック動作の際、給電プラグロックモータ27の他方向の回転によりヘリカルギヤ31の内壁面37bでリンク35の係止突36を押すことにより、リンク35及びディスク38をアンロック方向(図4の矢印S1方向)に回動させ、アンロック途中位置まで移動させる。
【0029】
ケース23には、ロック途中位置/アンロック途中位置まで到達したリンク35及びディスク38を、動作終端位置であるロック位置/アンロック位置まで、節度荷重によって機械的に回動させる節度機構48が設けられている。節度機構48には、リンク35を回動方向に押し込む節度ピース49と、節度ピース49をリンク35側に常時付勢する付勢部材50とが設けられている。節度ピース49は、平面視略T字状に形成されるとともに、先端が曲面状に形成されている。付勢部材50は、例えばコイルばねが使用されている。なお、節度機構48が可動機構を構成する。
【0030】
リンク35がアンロック位置からロック位置に向かって回動するとき、又はその逆方向に回動するとき、リンク35は曲面状の押込部51にて付勢部材50の付勢力に抗して節度ピース49を奥(図4の矢印K2方向)に押し込みながら回動する。そして、押込部51が節度ピース49を上り切ると、今度は付勢部材50の付勢力によって節度ピース49がリンク側(図4の矢印S2方向)に飛び出す動きをとり、節度ピース49が押込部51を押すことでリンク35及びディスク38がロック位置へ回動する。
【0031】
ディスク38がロック位置に到達してロッキングレバー43の上方に位置すると、ロッキングレバー43の上方への回動が規制される。このため、給電プラグロック装置22がロック状態をとる。一方、ディスク38がアンロック位置に到達してロッキングレバー43から離間すると、ロッキングレバー43の上方への回動が許容される。このため、給電プラグロック装置22がアンロック状態をとる。
【0032】
図1に示すように、給電プラグロック装置22には、給電プラグロック装置22のロック動作/アンロック動作を制御するプラグロック制御部52が設けられている。プラグロック制御部52は、例えばIC(Integrated Circuit)から構成されている。プラグロック制御部52は、給電プラグロックモータ27を制御してディスク38を回転させることにより、ロック状態/アンロック状態を切り換える。なお、プラグロック制御部52が制御手段に相当する。
【0033】
プラグロック制御部52は、給電プラグロックモータ27を電流検知制御にて制御することにより、ロック動作/アンロック動作を実行する。電流検知制御は、給電プラグロックモータ27に流れる電流を測定し、電流測定値からモータ回転数を推測し、このモータ回転数(推測値)によってディスク38(リンク35)の距離を積算する。そして、電流が閾値を継続して超えた時点で、ディスク38の移動距離が最小必要距離に到達していれば、正常位置で停動電流発生とし判定し、モータ通電を停止する。一方、電流が閾値を継続して超えた時点で、ディスク38の移動距離が最小必要距離に到達していなければ、異常位置で停動電流発生と判定し、規定時間通電した後、モータ通電を終了する。なお、モータ回転数が動作量に相当する。
【0034】
本例の場合、ロック動作/アンロック動作のとき、リンク35は節度ピース49を乗り上げようとする動きをとるので、このとき給電プラグロックモータ27に負荷がかかり、結果、給電プラグロックモータ27に流れる電流が大きくなる。よって、プラグロック制御部52は、この時点で給電プラグロックモータ27に流れる電流が閾値以上となることを確認してモータ通電を停止し、以降のリンク35及びディスク38の回動を節度機構48の節度荷重にて実行させることにより、ディスク38をロック位置/アンロックに位置させる。
【0035】
次に、本例の給電プラグロック装置22の動作を、図5を用いて説明する。
給電プラグロック装置22が図5(a)に示すアンロック状態のとき、プラグロック制御部52はロックトリガを入力すると、給電プラグロックモータ27を一方向に回転(例えば正転)させ、ロック動作を開始する。このとき、ヘリカルギヤ31がロック方向(図5(a)の矢印K1方向)に回動し、ヘリカルギヤ31の内壁面37aがリンク35の係止突36を後から押すことにより、ヘリカルギヤ31とリンク35とディスク38とが一体となってロック方向に回動する。また、リンク35の押込部51が節度ピース49を押し、節度ピース49が奥方向(図5(a)の矢印K2方向)に直線移動する。
【0036】
図5(b)に示すように、ロック動作時、リンク35が節度ピース49を上り切ろうとするとき(又は上り切ったとき)、給電プラグロックモータ27に最も大きな負荷がかかるので、給電プラグロックモータ27に流れる電流が大きくなる。このため、プラグロック制御部52は、電流が閾値以上となることを確認し、この時点で給電プラグロックモータ27の通電を停止する。なお、この後、リンク35は慣性力で回転を継続する。
【0037】
図5(c)に示すように、リンク35が節度ピース49を上り切ったとき、ヘリカルギヤ31のロック位置用位置決め突32がケース側位置決め突34に当たり、ヘリカルギヤ31のそれ以上の回動が規制される。よって、この時点でヘリカルギヤ31は回動できなくなり、これ以降はリンク35及びディスク38のみがロック方向へ回動可能となる。
【0038】
また、リンク35が節度ピース49を上り切ると、今度は節度ピース49が付勢部材50の付勢力にてリンク35を後から押す動作をとり、節度ピース49が手前側(図5(c)の矢印K2方向)に直線移動する。つまり、電流検知制御による給電プラグロックモータ27の停止後は、節度機構48の節度荷重にてリンク35及びディスク38のロック位置への回動が継続される。このとき、リンク35及びディスク38は、係止溝37の長さWだけ、ロック方向に回動する動きをとる。
【0039】
そして、図5(d)に示すように、リンク35の係止突36が、ヘリカルギヤ31の係止溝37の内壁面37bに当接すると、リンク35及びディスク38の回動が停止する。このとき、ディスク38はロッキングレバー43の上方に位置し、ロッキングレバー43の回動を規制することで、インレット14に突部21に係止されたロックアーム16の開き操作を制限する。よって、給電プラグロック装置22がロック状態となり、給電プラグ9がインレット14に固定される。
【0040】
ところで、図6に示すように、ロックアーム16がインレット14の突部21に係止したとき、例えば爪部18の噛み合わせが悪いときなどは、爪部18が所定量浮いて突部21に係止する状態、いわゆる半嵌合をとるときもある。この状況下では、浮いたロックアーム16にてロッキングレバー43が上方に所定量回動した状態となるので、ディスク38の移動経路上にロッキングレバー43が飛び出してしまう。よって、ディスク38がロック方向に回動するとき、飛び出たロッキングレバー43の壁にディスク38が衝突してしまい、ディスク38はロック位置の手前で回動が止まってしまうことになる。
【0041】
この場合、例えばロックアーム16を上下左右に動かして噛み合いを正せば、爪部18は下がって正常位置をとり、ロッキングレバー43も付勢部材47の付勢力で下側に回動する。よって、この後は、節度荷重によってリンク35及びディスク38がロック方向への回動を再開し、ロック位置に到達することになる。つまり、半嵌合が生じていても、ロックアーム16の噛み合いを正せば、節度機構48によってディスク38を正常なロック位置まで回動させることが可能である。なお、アンロック動作は、ロック動作と動作原理が基本的に同じであるので、説明は省略する。
【0042】
以上により、本例においては、図7に示すように、最初は給電プラグロックモータ27を電流検知制御により動作させる制御にてディスク38を回動させ、電流検知制御で給電プラグロックモータ27が停止した後は、節度機構48の節度荷重によりディスク38を動作終端位置のロック位置/アンロック位置まで運ぶ。つまり、本例の場合は、半嵌合時にディスク38がロッキングレバー43にどんつきするタイミングよりも、電流検知制御によるディスク38の回動を終了するタイミングを早く設定している。
【0043】
このため、本例は、電流検知制御終了後、ディスク38は強制的に動作終端位置まで運ばれるので、ディスク38は結果として動作終端位置に位置することになる。よって、プラグロック制御部52が計算にて求めた位置(動作終了の判定位置)と、ディスク38の現実位置とを一致させることが可能となる。従って、プラグロック制御部52が求めたディスク38の計算位置と現実位置との間に誤差を生じ難くすることが可能となる。このため、仮にロック動作が繰り返されたり、ロック/アンロックの繰り返しが実行されたりしても、距離のズレが蓄積されずに済むので、ディスク38の位置の誤判定が生じ難くなる。
【0044】
また、仮にディスク38がロックアーム16に半嵌合する状態をとっていても、例えばロックアーム16を位置直しするなどして半嵌合が解消されれば、節度機構48の節度荷重によって、ディスク38をロック位置まで動かすことが可能となる。よって、給電プラグロック装置22がロック動作を実行したにもかかわらず、ロック状態に移行できないまま放置されてしまうことを防止することも可能となる。
【0045】
本実施形態の構成によれば、以下に記載の効果を得ることができる。
(1)給電プラグロックモータ27を電流検知制御することによりディスク38を動作終端位置(ロック位置、アンロック位置)の手前まで送り、その位置から動作終端位置までは節度機構48の節度荷重にてディスク38を機械的に運ぶ。よって、プラグロック制御部52が計算により求めるディスク38の位置と現実位置とが一致、つまりイニシャライズ(初期化)されるので、計算位置と現実位置との間に誤差を生じ難くすることができる。
【0046】
(2)ディスク38がロックアーム16に半嵌合していても、半嵌合が解消されれば、節度機構48の節度荷重によってディスク38をロック位置に位置させることができる。よって、ロック動作の動作確実性を確保することがきる。
【0047】
(3)給電プラグロックモータ27ではディスク38を途中位置まで運ぶだけでよい。よって、給電プラグロックモータ27の通電時間が短く済むので、省電力とすることができる。
【0048】
なお、実施形態はこれまでに述べた構成に限らず、以下の態様に変更してもよい。
・ディスク38を途中位置まで運ぶときに使用する制御は、電流検知制御に限定されない。例えば、タイマ制御を使用し、タイマがタイムアップするまでモータ通電して、ディスク38を所定位置まで回動させるものでもよい。
【0049】
・モータの動作トリガ(ロックトリガ、アンロックトリガ)は、例えば車両のドアロック連動とする場合、ドアロックモータに流れる電流(電圧)でもよいし、専用の操作手段が操作されたときに出力されるスイッチ信号でもよい。
【0050】
・ロック部材は、回転式に限らず、直線方向にスライド移動する直線式としてもよい。
・ロック機構24は、実施形態に述べた例に限らず、適宜変更可能である。例えば、ディスク38が直にロックアーム16の開き操作を規制するものでもよい。
【0051】
・ロック機構24は、ロック部材が給電プラグ9の孔に挿し込まれてロック状態をとるものでもよい。
・駆動手段は、モータに限らず、例えばソレノイドを使用してもよい。
【0052】
・可動機構は、節度機構48に限定されず、他の機械的な機構を用いてもよい。
・本例の思想は、ロック側及びアンロック側の少なくともいずれかに採用されていればよい。
【0053】
・車両1は、ハイブリッド車に限定されず、例えばモータのみで走行する電気自動車でもよい。
・給電プラグロック装置22は、車両1に適用されることに限らず、他の装置や機器に応用してもよい。
【符号の説明】
【0054】
9…給電プラグ、14…インレット、22…給電プラグロック装置、27…駆動手段としての給電プラグロックモータ、35…可動機構を構成するリンク、37…可動機構を構成する係止溝、38…ロック部材を構成するディスク、43…ロック部材を構成するロッキングレバー、48…可動機構を構成する節度機構、49…節度ピース、50…付勢部材、52…制御手段としてのプラグロック制御部。
【特許請求の範囲】
【請求項1】
インレットに給電プラグが接続されたとき、前記インレット側のロック部材が前記給電プラグに係止することにより、前記給電プラグの不正取り外しを防止する給電プラグロック装置において、
前記ロック部材を動作させる際の駆動源となる駆動手段と、
前記駆動手段により前記ロック部材を動作終端位置の手前まで移動させ、このときの前記ロック部材の位置を演算して該位置を把握しておく制御手段と、
前記駆動手段が停止した後、機械的な荷重で前記ロック部材を前記動作終端位置まで移動させる可動機構とを備え、
前記可動機構が利くまでは前記ロック部材を前記制御にて動作させ、前記可動機構が利く状態となったとき、前記制御を終了して前記ロック部材を前記可動機構にて機械的に前記動作終端位置に運ぶ
ことを特徴とする給電プラグロック装置。
【請求項2】
前記可動機構は、付勢部材の付勢力により押された節度ピースの節度荷重にて前記ロック部材を移動させる節度機構により、前記ロック部材を前記動作終端位置まで移動させる
ことを特徴とする請求項1に記載の給電プラグロック装置。
【請求項3】
前記制御手段は、前記駆動手段に流れる電流を測定し、該測定値から前記駆動手段の動作量を推測し、この推測値により前記ロック部材の移動距離を求め、前記電流が閾値を超えたとき、前記移動距離が最小必要距離に到達していれば、前記駆動手段の通電を停止する電流検知制御によって、前記駆動手段を制御する
ことを特徴とする請求項1又は2に記載の給電プラグロック装置。
【請求項1】
インレットに給電プラグが接続されたとき、前記インレット側のロック部材が前記給電プラグに係止することにより、前記給電プラグの不正取り外しを防止する給電プラグロック装置において、
前記ロック部材を動作させる際の駆動源となる駆動手段と、
前記駆動手段により前記ロック部材を動作終端位置の手前まで移動させ、このときの前記ロック部材の位置を演算して該位置を把握しておく制御手段と、
前記駆動手段が停止した後、機械的な荷重で前記ロック部材を前記動作終端位置まで移動させる可動機構とを備え、
前記可動機構が利くまでは前記ロック部材を前記制御にて動作させ、前記可動機構が利く状態となったとき、前記制御を終了して前記ロック部材を前記可動機構にて機械的に前記動作終端位置に運ぶ
ことを特徴とする給電プラグロック装置。
【請求項2】
前記可動機構は、付勢部材の付勢力により押された節度ピースの節度荷重にて前記ロック部材を移動させる節度機構により、前記ロック部材を前記動作終端位置まで移動させる
ことを特徴とする請求項1に記載の給電プラグロック装置。
【請求項3】
前記制御手段は、前記駆動手段に流れる電流を測定し、該測定値から前記駆動手段の動作量を推測し、この推測値により前記ロック部材の移動距離を求め、前記電流が閾値を超えたとき、前記移動距離が最小必要距離に到達していれば、前記駆動手段の通電を停止する電流検知制御によって、前記駆動手段を制御する
ことを特徴とする請求項1又は2に記載の給電プラグロック装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−209099(P2012−209099A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−73127(P2011−73127)
【出願日】平成23年3月29日(2011.3.29)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月29日(2011.3.29)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
[ Back to top ]