
統合シミュレータ
【課題】統合シミュレータの実行効率を向上する。
【解決手段】交通流シミュレータとITSシミュレータと、を備え、交通流シミュレータによる車両位置の結果に基づいてITSアプリケーションが車両動作に与える影響を求め、この影響を交通流シミュレータに反映して車両動作を模擬することを繰り返して車両の動作を模擬する統合シミュレータであって、交通流シミュレータは、タイムステップtにおける車両位置を、タイムステップt−n(n≧2)以前の前記交通流シミュレータおよび前記ITSシミュレータの結果に基づいて求めるものであり、前記統合シミュレータは、タイムステップtまでのシミュレーションが完了している際に、タイムステップt+1〜t+nにおける車両の位置およびITSが車両動作に与える影響を求めるn個のシミュレーションを並列に実行する。
【解決手段】交通流シミュレータとITSシミュレータと、を備え、交通流シミュレータによる車両位置の結果に基づいてITSアプリケーションが車両動作に与える影響を求め、この影響を交通流シミュレータに反映して車両動作を模擬することを繰り返して車両の動作を模擬する統合シミュレータであって、交通流シミュレータは、タイムステップtにおける車両位置を、タイムステップt−n(n≧2)以前の前記交通流シミュレータおよび前記ITSシミュレータの結果に基づいて求めるものであり、前記統合シミュレータは、タイムステップtまでのシミュレーションが完了している際に、タイムステップt+1〜t+nにおける車両の位置およびITSが車両動作に与える影響を求めるn個のシミュレーションを並列に実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のシミュレータを統合してシミュレーションを行う統合シミュレータに関し、特に統合シミュレータにおける各要素シミュレータの連携方法に関する。
【背景技術】
【0002】
ITS(Intelligent Transport System)として、路車間通信や車車間通信などを用いた様々なアプリケーションが検討されている。ITSアプリケーションの動作検証のためには、現実の交通環境下で数十〜数百台の車両を用いた実証実験を行う必要がある。このような実証実験は非常に大がかりでコストを要する。開発の最終段階ではこのような手法による検証が必要であるが、開発初期段階からこのような検証を頻繁に行うことは現実的ではない。そこで、計算機を用いたシミュレーションによるITSアプリケーションの検証が不可欠となる。
【0003】
通信を利用するITSアプリケーションを評価するためには、ITSアプリケーションシミュレーションに、各時刻における車両位置を決定するミクロ交通流シミュレーション、送信機器と受信機器の通信可能性を評価する電波伝搬シミュレーション、通信による情報が伝達可能かを評価するネットワークシミュレーションを組み合わせる必要がある。本発明者らは、それぞれの要素シミュレータと通信する統合プラットフォームを開発し、各要素シミュレータの選択や交換が可能な疎結合アーキテクチャの統合シミュレーションシステムを開発している(図1参照)。
【0004】
上記の統合シミュレーションにおいては、まず、交通流シミュレータが時刻t(n)の車両位置を計算する。この計算結果を利用して通信シミュレータ(電波伝搬シミュレータとネットワークシミュレータ)において、各車両間の通信をシミュレーションする。そして、通信結果を利用してITSアプリケーションの動作をシミュレーションする。この結果を用いて、時刻t(n+1)の車両位置を交通流シミュレータによって求める。以下、この処理が繰り返される。このように、従来の統合シミュレーションにおいては、個々の要素シミュレータの結果を利用して他の要素シミュレータが直列的に処理を行って、シミュレーションが実施される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−350549号公報
【特許文献2】特開2004−38785号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のようなシミュレーションは計算量が膨大になるため、計算機資源を効率的に使用して高速に計算できることが望まれる。本発明は、複数のシミュレータを統合してシミュレーションを行う統合シミュレータにおいて、実行効率を向上させることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために本発明では、複数のシミュレータを統合した統合シミュレーションを以下の手段または処理によって行う。
【0008】
本発明に係る統合シミュレータは、第1〜第N(Nは2以上の整数)の複数の要素シミュレータを連携させて、第1の要素シミュレータの計算結果に基づいて第2の要素シミュ
レータが計算を行い、第2の要素シミュレータの計算結果に基づいて第3の要素シミュレータが計算を行い、・・・、第N−1の要素シミュレータの計算結果に基づいて第Nの要素シミュレータが計算を行ってシミュレーション結果を得る統合シミュレータである。本発明において、第1の要素シミュレータは、タイムステップtにおけるシミュレーション結果を、タイムステップt−n(nは2以上の整数)以前の第1〜第Nの要素シミュレータの結果に基づいて求めるものである。そして、本統合シミュレータにおいては、タイムステップtまでのシミュレーションが完了している際には、タイムステップt+1,t+2,・・・、t+nのシミュレーション結果を並列に実行する。
【0009】
本発明に係る統合シミュレータは、要素シミュレータとして交通流シミュレータとITSシミュレータとを採用し、ITSアプリケーションを模擬するシミュレータとして構成することができる。交通流シミュレータは、いわゆる交通マイクロシミュレータであり、車両の移動を模擬し、各時刻での車両位置を求める。また、ITSシミュレータは、ITSアプリケーションの動作を模擬し、ITSアプリケーションが車両動作に与える影響を求める。なお、ITSシミュレータは、さらに複数の要素シミュレータから構成されても構わない。たとえば、ITSシミュレータは、通信機間の通信可能性を評価する電波伝搬シミュレータ、通信による情報が伝達可能かを評価するネットワークシミュレータ、ITSアプリケーションの動作を模擬するITSアプリケーションシミュレータから構成されても良い。そして、本統合シミュレータは、各時刻における車両位置を交通流シミュレータによって求め、その結果に基づいて、同時刻におけるITSアプリケーションが車両動作に与える影響を求め、さらに、その結果を交通流シミュレータに反映して次の時刻における車両動作を模擬する。この処理を繰り返して、本統合シミュレータは車両の動作を模擬する。
【0010】
ここで交通流シミュレータは、タイムステップtにおける車両位置を、タイムステップt−n(nは2以上の整数)以前の交通流シミュレータおよびITSシミュレータの結果に基づいて求める。そして、タイムステップtまでの交通流シミュレータおよびITSシミュレータの計算が終わっているときには、タイムスタップt+1、t+2、・・・、t+nにおける車両位置およびその車両位置におけるITSアプリケーションの動作を、並列に求める。
【0011】
上記のように、交通流シミュレータはnタイムステップ前よりも古い情報だけに基づいて車両の位置を求めているので、タイムステップtまでの計算が完了している場合には、上記n個(タイムステップt+1、t+2、・・・、t+n)についてのシミュレーションを並列して行うことができる。このように、並列して計算を行うことで、1タイムステップ分の全シミュレータによる計算が終了する前に他の計算を行うことができる。したがって、計算機資源を効率的に活用することができ、シミュレーションの実行効率を向上できる。
【0012】
交通流シミュレータはタイムステップtの車両位置を求める際に、タイムステップt−n以前の情報だけしか用いていないため、直近のnタイムステップの情報を利用することができない。しかしながら、ITSアプリケーションが動作を開始してから車両の動作に影響を与えるまでにはタイムラグが発生する。したがって、上述のnタイムステップが、このタイムラグよりも小さくなるように定めておけば、シミュレーションの精度を悪化させることなく、実行効率を向上させることができる。
【0013】
本発明において、ITSシミュレータは上述したように複数の要素シミュレータから構成されても良い。この場合、交通流シミュレータと、ITSシミュレータを構成する各要素シミュレータ(たとえば、電波伝搬シミュレータ、ネットワークシミュレータ、ITSアプリケーションシミュレータ)をそれぞれ個別のコンピュータシステムで実行すること
が好ましい。このようにすれば、上記のn個のシミュレーションをパイプライン並列処理することができる。なお、個別のコンピュータシステムには、物理的に異なるコンピュータシステムだけでなく、仮想化技術を用いて1台のコンピュータ上で実行される複数の仮想マシンも含まれる。
【0014】
また、本発明において、n個のコンピュータシステムを用意し、それぞれが上記の交通流シミュレータおよびITSシミュレータを実行可能としても良い。この場合は、n個のコンピュータシステムが並列して動作することで、上記n個のシミュレーションを並列に処理される。
【0015】
なお、本発明は、上記手段の少なくとも一部を有する統合シミュレータとして捉えることができる。また、本発明は、上記処理の少なくとも一部を含む統合シミュレータ用いたシミュレーション方法、または、このような方法を実現するためのプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0016】
本発明によれば、複数のシミュレータを統合してシミュレーションを行う統合シミュレータにおいて、実行効率が向上する。
【図面の簡単な説明】
【0017】
【図1】疎結合アーキテクチャによる統合シミュレータのシステム構成を示す図。
【図2】第1の実施形態における統合シミュレータの構成図。
【図3】第1の実施形態における要素シミュレータの連携を示す図。
【図4】ITSアプリケーションの動作が、車両動作に影響を与えるまでの遅延時間を説明する図。
【図5】第1の実施形態における統合シミュレーションプラットフォームの処理の流れを示すフローチャート。
【図6】第2の実施形態における統合シミュレータの構成図。
【図7】従来の手法による要素シミュレータの連携を示す図。
【発明を実施するための形態】
【0018】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0019】
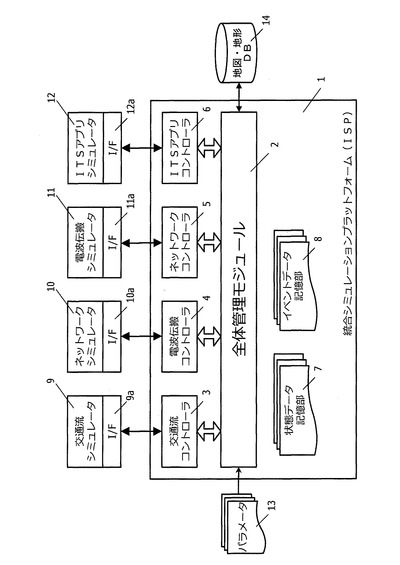
図1は、要素シミュレータを連携させて、通信を利用したITSアプリケーションを評価可能な統合シミュレータの機能構成を示す図である。複数の要素から現象をシミュレーションする場合は、それぞれの要素シミュレータを内部で密に組み合わせる方式もあるが、本発明においてはそれぞれ単体で動作する要素シミュレータを疎に結合する方式を採用している。疎結合アーキテクチャは、統合シミュレーションプラットフォーム(以下、ISPとも表記する)1を用意し、各要素シミュレータを通信により結合する。このような方式を採用する理由は、評価目的に応じて、要素シミュレータを適宜選択・交換可能とするためである。
【0020】
本発明に係る統合シミュレータは、ISP1によって交通流シミュレータ9、ネットワークシミュレータ10、電波伝搬シミュレータ11、ITSアプリケーションシミュレータ12を要素シミュレータとして用いる。交通流シミュレータ9は、車両の移動を模擬して、各時刻の車両を決めるミクロ交通流シミュレータである。ネットワークシミュレータ10は、通信によって情報が伝達できるかを評価する。電波伝搬シミュレータ11は、車両の位置が刻々と変化する各時点において、車両間あるいは車両と路側通信設備との間で通信が可能か否かを評価する。ITSアプリケーションシミュレータ12は、車載機器や
路側設備のITSアプリケーションの動作を評価する。なお、ネットワークシミュレータ10と電波伝搬シミュレータ11をあわせて、無線通信を評価する通信シミュレータと捉えることもできる。また、ネットワークシミュレータ10と電波伝搬シミュレータ11とITSアプリケーションシミュレータ12をあわせて、無線通信を利用したITSシステムを評価するITSシミュレータと捉えることもできる。
【0021】
ISP1は、各要素シミュレータの連携を管理する全体管理モジュール2と、各要素シミュレータを制御する各種コントローラ(交通流コントローラ3、ネットワークコントローラ4、電波伝搬コントローラ5、ITSアプリケーションコントローラ6)を有する。ISP1は、各要素シミュレータの各タイムステップにおける状態を記憶する状態データ記憶部7、シミュレーションにおいて発生するイベント(たとえば、ドライバによる急制動、ITSアプリケーションによる衝突回避制御の開始、通信の発生など)を記憶するイベントデータ記憶部8を備える。
【0022】
全体管理モジュール2は、シミュレーション開始時刻、終了時刻、1タイムステップの時間などを含むシミュレーションパラメータ13を受け付けてシミュレーションを開始する。全体管理モジュール2は、状態データ記憶部7に格納されている状態データや、イベントデータ記憶部8に格納されているイベントデータ、地図・地形データベース14に格納されている地図・地形データを、コントローラ経由で各要素シミュレータに渡して、要素シミュレーションを実行させて、その結果を受け取る。要素シミュレータによる計算結果は、状態データ記憶部7やイベントデータ記憶部8に記憶される。なお、コントローラと各要素シミュレータの間には、要素シミュレータごとの差異を吸収するためのインタフェース9a,10a,11a,12aが設けられており、要素シミュレータを修正することなく利用可能である。
【0023】
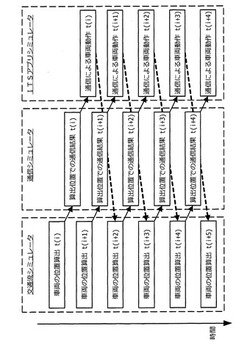
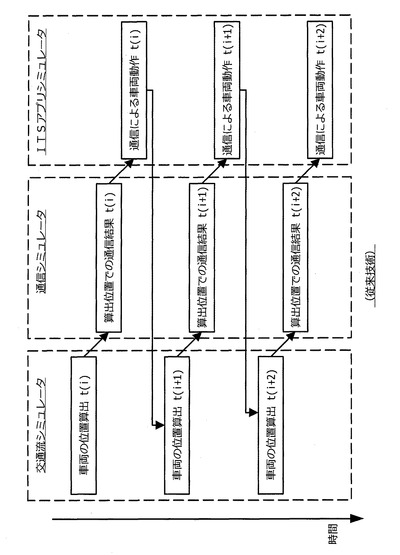
このような統合シミュレータを用いた従来の計算のフローを図7を参照して説明する。まず、初期値(時刻t(0)での各種状態)を交通流シミュレータ9に渡して、時刻t(1)での各車両の位置を算出する。なお、時刻t(i)はシミュレーション内での論理時刻であり、i番目のタイムステップを表す。次に、算出したt(1)での車両位置を入力として受け付けて、通信のシミュレーションを実行する。通信のシミュレーションは、ネットワークシミュレータ10によってレイヤー7からレイヤー1までのシミュレーションを行い、電波伝搬シミュレータ11によって電波伝搬のシミュレーションを行い、再度ネットワークシミュレータ10によってレイヤー1からレイヤー7までのシミュレーションを行うことで行われる。図7では、ネットワークシミュレータ10と電波伝搬シミュレータ11とをあわせて、通信シミュレータと表している。もっとも、両シミュレータ間でのデータのやりとりは直接行われるのではなく、上述したようにISP1を介して行われる。次に、時刻t(1)での通信のシミュレーション結果に基づいて、ITSアプリケーションシミュレータ12によって、ITSアプリケーションの動作を模擬する。ここで、たとえば、警告や衝突回避制御を行うことが判断されると、その影響が次タイムステップ以降の車両動作に影響を与えることになる。ここまでの処理により時刻t(1)までのシミュレーションが完了したことになる。以降は、t(1)の各要素シミュレータの計算結果に基づいて、再度交通流シミュレータ、通信シミュレータ、ITSアプリケーションシミュレータを順次実行することを繰り返して、シミュレーションを行っていく。
【0024】
ここで、各要素シミュレータを順次実行させていく図7に示すような手法では、シミュレータごとに空き時間(実行していない時間)が大量に発生するという問題がある。図7において3つの要素シミュレータによる1タイムステップ分の計算時間が同じである場合には、空き時間が2/3となる。より効率的に実行するには、各シミュレータでの空き時間を少なくすることが望ましい。
【0025】
本発明では、交通流シミュレータ(マイクロシミュレータ)において、十分に小さな時間刻み(タイムステップ)でシミュレーションを行っているときに、1タイムステップごとの結果を反映して次タイムステップのシミュレーションを実行するのではなく、複数タイムステップごとに前回の計算結果を反映させることで、実行効率を引き上げる。具体的には、時刻t(i)の車両位置を交通流シミュレータ9において求める際に、時刻t(i−n)以前の各要素シミュレータの計算結果のみを利用する。ここで、nは2以上の整数である。したがって、時刻t(i)までの各要素シミュレータの計算が終了しているときには、t(i−n+1)までの結果に基づいてt(i+1)での車両位置、t(i−n+2)までの結果に基づいてt(i+2)での車両位置、・・・、t(i)までの結果に基づいてt(i+n)での車両位置を求めるn個のシミュレーションを並列に実行することができる。
【0026】
統合シミュレータシステムを具体的にどのように構成するかは、いくつかの手法が考えられる。
【0027】
(第1の実施形態)
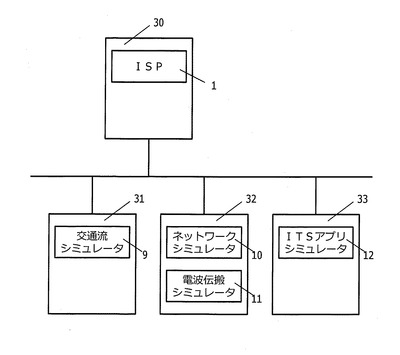
第1の手法は、図2に示すように、ISPおよび各要素シミュレータを、個別のコンピュータシステムに配置する手法である。ここでは、ネットワークを介して接続されたコンピュータシステム30,31,32,33のそれぞれに、ISP1、交通流シミュレータ9、ネットワークシミュレータ10及び電波伝搬シミュレータ11,ITSアプリケーションシミュレータ12をインストールしている。なお、各コンピュータシステム30〜33はそれぞれ1つのみのコンピュータで構成される必要はなく、複数のコンピュータから構成されるものであっても良い。すなわち、それぞれのシミュレータが独立したシステムで実行されていればよい。
【0028】
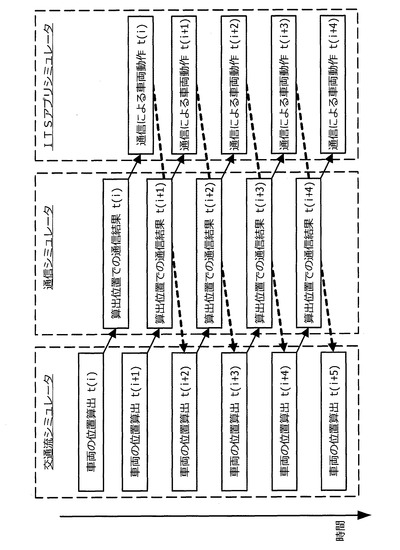
このような構成を採用した場合の計算のフローを図3を参照して説明する。ここでは、n=2として、2つのシミュレーションを並列に実行している。まず、t(i−2)までのシミュレーション結果に基づいて、交通流シミュレータによってt(i)の車両位置を求める。このt(i)の車両位置を入力として受け付けて、通信のシミュレーションおよびITSアプリケーションのシミュレーションを行う点は上記従来の手法と同様である。ここで、交通流シミュレータによってt(i)の車両位置の計算が完了した時点で交通流シミュレータが利用可能になるので、ISP1は交通流シミュレータにt(i−1)までのシミュレーション結果に基づいてt(i+1)での車両位置を計算させる。このように、ITSアプリケーションシミュレータによるシミュレーション結果を、1タイムステップ後の交通流シミュレーションに反映させるのではなく、n(図3ではn=2)タイムステップ後の交通流シミュレーションに反映させるため、パイプライン処理的にn個のシミュレーションを並列に実行できる。なお、図2では、要素シミュレータが3つのコンピュータシステムによって実行されているので、最大で3つのタイムステップに関するシミュレーションを並列に実行可能である。
【0029】
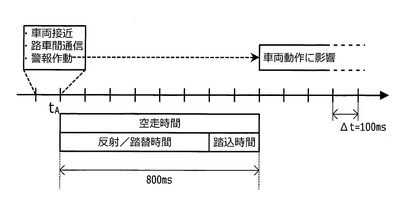
なお、ITSアプリケーションシミュレーションの結果をnタイムステップより後のシミュレーションのみに反映させるために、シミュレーション精度の低下が懸念される。この点について説明する。ITSアプリケーションは、ドライバに対して衝突の警告を発したり、車両の制御に介入したりする。しかしながら、衝突の警告を発してから、実際の車両が減速動作を開始するまでには所定の遅延がある。図4はITSアプリケーションの実行から車両動作に影響が出るまでの遅延時間を説明する図である。時刻tAで、2台の車両が接近し衝突の危険があることが路車間通信や車車間通信で判明し、ITSアプリケーション(車載機器)がドライバに警告を発した状況を考える。警告が報知されてから、ドライバがこの警告を認識し反応するまでの時間(反射時間)、アクセルからブレーキに足を踏み換える時間(踏替時間)、ブレーキを踏み込んでから実際にブレーキが効き始める
までの時間(踏込時間)の後に実際にブレーキが効き始めて車両動作に影響が現れる。これらの時間は個人によって差はあるものの、概ね、反射時間が0.4秒程度、踏替時間が0.2秒程度、踏込時間が0.1〜0.3秒であり、合計0.8秒程度の空走時間が生じる。したがって、ITSアプリケーションの動作を直後の交通流シミュレーションに反映させる必要はない。シミュレーションのタイムステップを100ミリ秒(=0.1秒)、つまり上記の遅延時間(空走時間)よりも十分短くしている場合には、ITSアプリケーションの動作を数ステップ後の交通流シミュレーションに反映させれば精度の低下はない。ここで、上記のnは、nタイムステップが上記遅延時間(ITSアプリケーションが動作してから、それが車両動作に影響を与えるまでの時間)よりも短く設定しておけば、シミュレーション精度低下の問題は発生しない。なお、ITSアプリケーションが自動制御を行い人間の操作が介入しない場合であっても、車両動作までに影響が出るまでには時間を要する。たとえば、ITSアプリケーションが車両のブレーキを自動で行う場合であっても、実際にブレーキが効き始めるには上記踏込時間と同程度の時間を要する。
【0030】
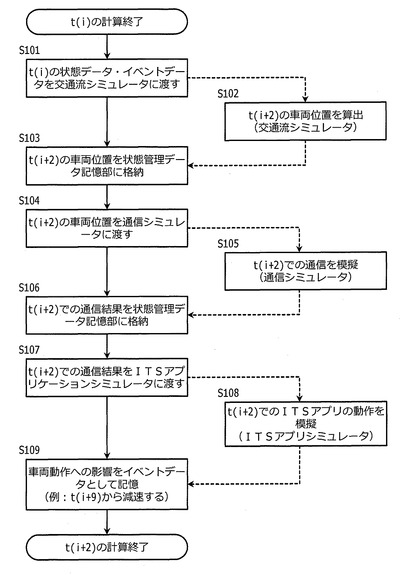
本実施形態におけるISP(統合シミュレーションプラットフォーム)1の動作を、図5のフローチャートを参照して説明する。このフローチャートは、n=2の場合を例に説明している。まず、ISP1が、時刻t(i)までのシミュレーションが終了したことを検知すると、t(i)の状態データ(車両位置等)やイベントデータを交通流シミュレータに渡して、交通流シミュレーションを実行させる(S101)。交通流シミュレータは、t(i)までの実行結果に基づいてt(i+2)の車両位置を求め、ISP1に送信する(S102)。ISP1は、t(i+2)の車両位置を状態管理データ記憶部に格納する(S103)とともに、この車両位置を通信シミュレータに渡す(S104)。通信シミュレータは、t(i+2)での車両位置における通信を模擬し、その結果をISP1に送信する(S105)。ISP1は、t(i+2)における通信結果を状態管理データ記憶部に格納する(S106)とともに、この結果をITSアプリケーションシミュレータに渡す(S107)。ITSアプリケーションシミュレータは、t(i+2)における通信結果に基づいてITSアプリケーションの動作を模擬し、ISP1に渡す(S108)。ISP1は、ITSアプリケーションの動作が車両動作に影響を与える時刻を求めて、その時刻と車両動作に与える影響の内容とを、イベントデータ記憶部に格納する(S109)。たとえば、「t(i+9)から車両が減速する」という情報を記憶しても良いし、「t(i+7)からドライバがブレーキを作動させる」という情報を記憶しても良い。ITSアプリケーションの動作が車両動作に影響を与えるまでの遅延時間は、ITSアプリの動作ごとにあらかじめ定めておいても良いし、ドライバごとに変化させるために交通流シミュレータが有するドライバモデルを参照して決定しても良い。
【0031】
なお、n個のシミュレーションを並列して実行しているため、並列に実行されるn個のシミュレーション列のそれぞれでITSアプリケーションが作動すると計算される場合がある。しかしながら、実際にはそのような車両動作に影響を与えるイベントの発生は1回のみであるため、複数回同じイベントを処理しないための仕組みが必要である。ここでは、たとえば、t(i)でイベント(たとえば、警告の報知、運転への介入)が発生した場合に、ISP1の共有データベースに、t(i)で当該イベントが発生した旨のフラグを格納する。このフラグは、所定のタイムステップ(たとえば、nタイムステップ)後までの同一イベントの発生を禁止することを示すフラグである。ITSアプリケーションシミュレータは、ITSアプリケーション動作の模擬の後、共有データベースを参照して直近のnタイムステップ以内にフラグが立っていないか検査してから、フラグが立っていない場合のみイベントデータをイベントデータ記憶部に格納する。直近のnタイムステップ以内にフラグが立っている場合は、イベントデータの格納を行わない。このようにすれば、並列に実行されるシミュレーション列のそれぞれで連続して同じイベントが発生することを防ぐことができる。
【0032】
t(i)についてのシミュレーションが終了するたびに、t(i+n)のシミュレーションを開始しているので、結局n個のシミュレーションが同時に並列して実行されることになる。なお、シミュレーション開始時点においては、直近nタイムステップ分の結果が得られていないので並列処理を実行できない。そこで、シミュレーション開始直後のnタイムステップ分に関しては、たとえば従来と同様の手法によって結果を得てから、上述したようにn個のシミュレーションを行えばよい。
【0033】
このように、統合シミュレータはn個(ここではn=2)のシミュレーションが並列に実行される。したがって、図3に示すように3つのシミュレータの空き時間を1/3まで減少させて、効率的に演算資源を用いたシミュレーションが実行できる。
【0034】
(第2の実施形態)
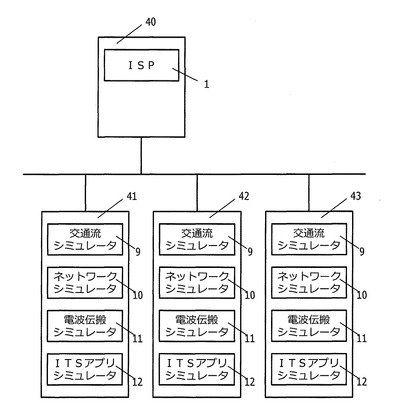
統合シミュレータの具体的構成例の第2の手法について、図6を参照して説明する。本実施形態では、ISP1が配置されたコンピュータシステム40と、それぞれ、交通流シミュレータ9、ネットワークシミュレータ10、電波伝搬シミュレータ11、ITSアプリケーションシミュレータ12が配置された3個のコンピュータシステム41、42、43から構成される。なお、ここでn=3の場合を例にして説明しているので、3台のコンピュータシステムが用いられている。
【0035】
本実施形態においては、各コンピュータシステムが全ての要素シミュレータを備えているため、n個のシミュレーションを完全に並行に実施することができる。本実施形態によっても、上記第1の実施形態と同様の効果が得られる。さらに、パイプライン的な並列処理では問題が生じうるハードウェア資源の競合の問題も起こらない。さらに、コンピュータシステムを増やすことで、並列実行するシミュレーションの数を容易に増やせる。もっとも、第1の実施形態で説明したようにn×1タイムステップの論理時間が、ITSアプリケーションが車両動作に影響を与える遅延時間以内となるようにする必要がある。
【0036】
(その他)
上記の説明では、シミュレーション開始直後のnタイムステップ以外は、常にn個のシミュレーションが並列に実行されるものとして説明した。しかしながら、必ずしも常にn個のシミュレーションを並列に実行しなくても構わない。たとえば、ITSアプリケーションの動作が車両動作に重大な影響を与える場合は、シミュレーション開始時と同様に並列化せずに計算するようにしても良い。より具体的には、タイムステップt(i)において特定のイベントが発生した場合には、ISP1は、並列処理によって求められているタイムステップt(i+1)以降の計算結果を破棄する。そして、タイムステップt(i)の計算結果を基に、各要素シミュレータを連携してt(i+1)の計算結果を求める。さらに、1タイムステップずつnタイムステップ分の計算を実行する。タイムステップt(i+n−1)までの計算結果が得られたら、n個のシミュレーション列を並列に動作させる処理(図5のフローチャート)を再開する。
【0037】
このようにすることで、重大なイベントが発生した場合のシミュレーション精度を向上させることができる。このような計算動作を行う場合、並列実行に伴う処理の効率化の効果が得られなくなるが、交通流マイクロシミュレーションにおいては重大なイベントが発生しない状況がほとんどである。どのようなイベントが発生したときに再計算を行うかの定義にもよるが、車両動作に大きく影響を与えるようなイベントの発生は1%以下である。したがって、99%以上の確率でシミュレーションの並列化が行え、従来の手法と比べて効率的な処理が実現可能である。
【0038】
また、上記の説明では複数のコンピュータが連携して統合シミュレータを構成する例を用いているが、たとえば、複数のプロセッサコアを有するコンピュータで上記統合シミュ
レータを構成しても構わない。ここで「複数のプロセッサコア」は、1つのCPUが複数のプロセッサコアを有する場合、複数のCPUを有する場合、1つのプロセッサコアを論理的に複数のプロセッサコアとして扱う場合(たとえば、インテル社のハイパースレッディング・テクノロジー)および、これらの組み合わせが考えられる。このようなマルチコア環境において複数の仮想マシンを構築して統合シミュレータを構成しても良い。
【0039】
また、上記の説明では、疎結合アーキテクチャを採用した統合シミュレータを例に説明しているが、本発明は各要素シミュレータを内部で密に組み合わせる密結合アーキテクチャの統合シミュレータに対しても用いることが可能である。
【符号の説明】
【0040】
1 統合シミュレーションプラットフォーム(ISP)
2 全体管理モジュール
9 交通流シミュレータ
10 ネットワークシミュレータ
11 電波伝搬シミュレータ
12 ITSアプリケーションシミュレータ
【技術分野】
【0001】
本発明は、複数のシミュレータを統合してシミュレーションを行う統合シミュレータに関し、特に統合シミュレータにおける各要素シミュレータの連携方法に関する。
【背景技術】
【0002】
ITS(Intelligent Transport System)として、路車間通信や車車間通信などを用いた様々なアプリケーションが検討されている。ITSアプリケーションの動作検証のためには、現実の交通環境下で数十〜数百台の車両を用いた実証実験を行う必要がある。このような実証実験は非常に大がかりでコストを要する。開発の最終段階ではこのような手法による検証が必要であるが、開発初期段階からこのような検証を頻繁に行うことは現実的ではない。そこで、計算機を用いたシミュレーションによるITSアプリケーションの検証が不可欠となる。
【0003】
通信を利用するITSアプリケーションを評価するためには、ITSアプリケーションシミュレーションに、各時刻における車両位置を決定するミクロ交通流シミュレーション、送信機器と受信機器の通信可能性を評価する電波伝搬シミュレーション、通信による情報が伝達可能かを評価するネットワークシミュレーションを組み合わせる必要がある。本発明者らは、それぞれの要素シミュレータと通信する統合プラットフォームを開発し、各要素シミュレータの選択や交換が可能な疎結合アーキテクチャの統合シミュレーションシステムを開発している(図1参照)。
【0004】
上記の統合シミュレーションにおいては、まず、交通流シミュレータが時刻t(n)の車両位置を計算する。この計算結果を利用して通信シミュレータ(電波伝搬シミュレータとネットワークシミュレータ)において、各車両間の通信をシミュレーションする。そして、通信結果を利用してITSアプリケーションの動作をシミュレーションする。この結果を用いて、時刻t(n+1)の車両位置を交通流シミュレータによって求める。以下、この処理が繰り返される。このように、従来の統合シミュレーションにおいては、個々の要素シミュレータの結果を利用して他の要素シミュレータが直列的に処理を行って、シミュレーションが実施される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−350549号公報
【特許文献2】特開2004−38785号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のようなシミュレーションは計算量が膨大になるため、計算機資源を効率的に使用して高速に計算できることが望まれる。本発明は、複数のシミュレータを統合してシミュレーションを行う統合シミュレータにおいて、実行効率を向上させることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために本発明では、複数のシミュレータを統合した統合シミュレーションを以下の手段または処理によって行う。
【0008】
本発明に係る統合シミュレータは、第1〜第N(Nは2以上の整数)の複数の要素シミュレータを連携させて、第1の要素シミュレータの計算結果に基づいて第2の要素シミュ
レータが計算を行い、第2の要素シミュレータの計算結果に基づいて第3の要素シミュレータが計算を行い、・・・、第N−1の要素シミュレータの計算結果に基づいて第Nの要素シミュレータが計算を行ってシミュレーション結果を得る統合シミュレータである。本発明において、第1の要素シミュレータは、タイムステップtにおけるシミュレーション結果を、タイムステップt−n(nは2以上の整数)以前の第1〜第Nの要素シミュレータの結果に基づいて求めるものである。そして、本統合シミュレータにおいては、タイムステップtまでのシミュレーションが完了している際には、タイムステップt+1,t+2,・・・、t+nのシミュレーション結果を並列に実行する。
【0009】
本発明に係る統合シミュレータは、要素シミュレータとして交通流シミュレータとITSシミュレータとを採用し、ITSアプリケーションを模擬するシミュレータとして構成することができる。交通流シミュレータは、いわゆる交通マイクロシミュレータであり、車両の移動を模擬し、各時刻での車両位置を求める。また、ITSシミュレータは、ITSアプリケーションの動作を模擬し、ITSアプリケーションが車両動作に与える影響を求める。なお、ITSシミュレータは、さらに複数の要素シミュレータから構成されても構わない。たとえば、ITSシミュレータは、通信機間の通信可能性を評価する電波伝搬シミュレータ、通信による情報が伝達可能かを評価するネットワークシミュレータ、ITSアプリケーションの動作を模擬するITSアプリケーションシミュレータから構成されても良い。そして、本統合シミュレータは、各時刻における車両位置を交通流シミュレータによって求め、その結果に基づいて、同時刻におけるITSアプリケーションが車両動作に与える影響を求め、さらに、その結果を交通流シミュレータに反映して次の時刻における車両動作を模擬する。この処理を繰り返して、本統合シミュレータは車両の動作を模擬する。
【0010】
ここで交通流シミュレータは、タイムステップtにおける車両位置を、タイムステップt−n(nは2以上の整数)以前の交通流シミュレータおよびITSシミュレータの結果に基づいて求める。そして、タイムステップtまでの交通流シミュレータおよびITSシミュレータの計算が終わっているときには、タイムスタップt+1、t+2、・・・、t+nにおける車両位置およびその車両位置におけるITSアプリケーションの動作を、並列に求める。
【0011】
上記のように、交通流シミュレータはnタイムステップ前よりも古い情報だけに基づいて車両の位置を求めているので、タイムステップtまでの計算が完了している場合には、上記n個(タイムステップt+1、t+2、・・・、t+n)についてのシミュレーションを並列して行うことができる。このように、並列して計算を行うことで、1タイムステップ分の全シミュレータによる計算が終了する前に他の計算を行うことができる。したがって、計算機資源を効率的に活用することができ、シミュレーションの実行効率を向上できる。
【0012】
交通流シミュレータはタイムステップtの車両位置を求める際に、タイムステップt−n以前の情報だけしか用いていないため、直近のnタイムステップの情報を利用することができない。しかしながら、ITSアプリケーションが動作を開始してから車両の動作に影響を与えるまでにはタイムラグが発生する。したがって、上述のnタイムステップが、このタイムラグよりも小さくなるように定めておけば、シミュレーションの精度を悪化させることなく、実行効率を向上させることができる。
【0013】
本発明において、ITSシミュレータは上述したように複数の要素シミュレータから構成されても良い。この場合、交通流シミュレータと、ITSシミュレータを構成する各要素シミュレータ(たとえば、電波伝搬シミュレータ、ネットワークシミュレータ、ITSアプリケーションシミュレータ)をそれぞれ個別のコンピュータシステムで実行すること
が好ましい。このようにすれば、上記のn個のシミュレーションをパイプライン並列処理することができる。なお、個別のコンピュータシステムには、物理的に異なるコンピュータシステムだけでなく、仮想化技術を用いて1台のコンピュータ上で実行される複数の仮想マシンも含まれる。
【0014】
また、本発明において、n個のコンピュータシステムを用意し、それぞれが上記の交通流シミュレータおよびITSシミュレータを実行可能としても良い。この場合は、n個のコンピュータシステムが並列して動作することで、上記n個のシミュレーションを並列に処理される。
【0015】
なお、本発明は、上記手段の少なくとも一部を有する統合シミュレータとして捉えることができる。また、本発明は、上記処理の少なくとも一部を含む統合シミュレータ用いたシミュレーション方法、または、このような方法を実現するためのプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0016】
本発明によれば、複数のシミュレータを統合してシミュレーションを行う統合シミュレータにおいて、実行効率が向上する。
【図面の簡単な説明】
【0017】
【図1】疎結合アーキテクチャによる統合シミュレータのシステム構成を示す図。
【図2】第1の実施形態における統合シミュレータの構成図。
【図3】第1の実施形態における要素シミュレータの連携を示す図。
【図4】ITSアプリケーションの動作が、車両動作に影響を与えるまでの遅延時間を説明する図。
【図5】第1の実施形態における統合シミュレーションプラットフォームの処理の流れを示すフローチャート。
【図6】第2の実施形態における統合シミュレータの構成図。
【図7】従来の手法による要素シミュレータの連携を示す図。
【発明を実施するための形態】
【0018】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0019】
図1は、要素シミュレータを連携させて、通信を利用したITSアプリケーションを評価可能な統合シミュレータの機能構成を示す図である。複数の要素から現象をシミュレーションする場合は、それぞれの要素シミュレータを内部で密に組み合わせる方式もあるが、本発明においてはそれぞれ単体で動作する要素シミュレータを疎に結合する方式を採用している。疎結合アーキテクチャは、統合シミュレーションプラットフォーム(以下、ISPとも表記する)1を用意し、各要素シミュレータを通信により結合する。このような方式を採用する理由は、評価目的に応じて、要素シミュレータを適宜選択・交換可能とするためである。
【0020】
本発明に係る統合シミュレータは、ISP1によって交通流シミュレータ9、ネットワークシミュレータ10、電波伝搬シミュレータ11、ITSアプリケーションシミュレータ12を要素シミュレータとして用いる。交通流シミュレータ9は、車両の移動を模擬して、各時刻の車両を決めるミクロ交通流シミュレータである。ネットワークシミュレータ10は、通信によって情報が伝達できるかを評価する。電波伝搬シミュレータ11は、車両の位置が刻々と変化する各時点において、車両間あるいは車両と路側通信設備との間で通信が可能か否かを評価する。ITSアプリケーションシミュレータ12は、車載機器や
路側設備のITSアプリケーションの動作を評価する。なお、ネットワークシミュレータ10と電波伝搬シミュレータ11をあわせて、無線通信を評価する通信シミュレータと捉えることもできる。また、ネットワークシミュレータ10と電波伝搬シミュレータ11とITSアプリケーションシミュレータ12をあわせて、無線通信を利用したITSシステムを評価するITSシミュレータと捉えることもできる。
【0021】
ISP1は、各要素シミュレータの連携を管理する全体管理モジュール2と、各要素シミュレータを制御する各種コントローラ(交通流コントローラ3、ネットワークコントローラ4、電波伝搬コントローラ5、ITSアプリケーションコントローラ6)を有する。ISP1は、各要素シミュレータの各タイムステップにおける状態を記憶する状態データ記憶部7、シミュレーションにおいて発生するイベント(たとえば、ドライバによる急制動、ITSアプリケーションによる衝突回避制御の開始、通信の発生など)を記憶するイベントデータ記憶部8を備える。
【0022】
全体管理モジュール2は、シミュレーション開始時刻、終了時刻、1タイムステップの時間などを含むシミュレーションパラメータ13を受け付けてシミュレーションを開始する。全体管理モジュール2は、状態データ記憶部7に格納されている状態データや、イベントデータ記憶部8に格納されているイベントデータ、地図・地形データベース14に格納されている地図・地形データを、コントローラ経由で各要素シミュレータに渡して、要素シミュレーションを実行させて、その結果を受け取る。要素シミュレータによる計算結果は、状態データ記憶部7やイベントデータ記憶部8に記憶される。なお、コントローラと各要素シミュレータの間には、要素シミュレータごとの差異を吸収するためのインタフェース9a,10a,11a,12aが設けられており、要素シミュレータを修正することなく利用可能である。
【0023】
このような統合シミュレータを用いた従来の計算のフローを図7を参照して説明する。まず、初期値(時刻t(0)での各種状態)を交通流シミュレータ9に渡して、時刻t(1)での各車両の位置を算出する。なお、時刻t(i)はシミュレーション内での論理時刻であり、i番目のタイムステップを表す。次に、算出したt(1)での車両位置を入力として受け付けて、通信のシミュレーションを実行する。通信のシミュレーションは、ネットワークシミュレータ10によってレイヤー7からレイヤー1までのシミュレーションを行い、電波伝搬シミュレータ11によって電波伝搬のシミュレーションを行い、再度ネットワークシミュレータ10によってレイヤー1からレイヤー7までのシミュレーションを行うことで行われる。図7では、ネットワークシミュレータ10と電波伝搬シミュレータ11とをあわせて、通信シミュレータと表している。もっとも、両シミュレータ間でのデータのやりとりは直接行われるのではなく、上述したようにISP1を介して行われる。次に、時刻t(1)での通信のシミュレーション結果に基づいて、ITSアプリケーションシミュレータ12によって、ITSアプリケーションの動作を模擬する。ここで、たとえば、警告や衝突回避制御を行うことが判断されると、その影響が次タイムステップ以降の車両動作に影響を与えることになる。ここまでの処理により時刻t(1)までのシミュレーションが完了したことになる。以降は、t(1)の各要素シミュレータの計算結果に基づいて、再度交通流シミュレータ、通信シミュレータ、ITSアプリケーションシミュレータを順次実行することを繰り返して、シミュレーションを行っていく。
【0024】
ここで、各要素シミュレータを順次実行させていく図7に示すような手法では、シミュレータごとに空き時間(実行していない時間)が大量に発生するという問題がある。図7において3つの要素シミュレータによる1タイムステップ分の計算時間が同じである場合には、空き時間が2/3となる。より効率的に実行するには、各シミュレータでの空き時間を少なくすることが望ましい。
【0025】
本発明では、交通流シミュレータ(マイクロシミュレータ)において、十分に小さな時間刻み(タイムステップ)でシミュレーションを行っているときに、1タイムステップごとの結果を反映して次タイムステップのシミュレーションを実行するのではなく、複数タイムステップごとに前回の計算結果を反映させることで、実行効率を引き上げる。具体的には、時刻t(i)の車両位置を交通流シミュレータ9において求める際に、時刻t(i−n)以前の各要素シミュレータの計算結果のみを利用する。ここで、nは2以上の整数である。したがって、時刻t(i)までの各要素シミュレータの計算が終了しているときには、t(i−n+1)までの結果に基づいてt(i+1)での車両位置、t(i−n+2)までの結果に基づいてt(i+2)での車両位置、・・・、t(i)までの結果に基づいてt(i+n)での車両位置を求めるn個のシミュレーションを並列に実行することができる。
【0026】
統合シミュレータシステムを具体的にどのように構成するかは、いくつかの手法が考えられる。
【0027】
(第1の実施形態)
第1の手法は、図2に示すように、ISPおよび各要素シミュレータを、個別のコンピュータシステムに配置する手法である。ここでは、ネットワークを介して接続されたコンピュータシステム30,31,32,33のそれぞれに、ISP1、交通流シミュレータ9、ネットワークシミュレータ10及び電波伝搬シミュレータ11,ITSアプリケーションシミュレータ12をインストールしている。なお、各コンピュータシステム30〜33はそれぞれ1つのみのコンピュータで構成される必要はなく、複数のコンピュータから構成されるものであっても良い。すなわち、それぞれのシミュレータが独立したシステムで実行されていればよい。
【0028】
このような構成を採用した場合の計算のフローを図3を参照して説明する。ここでは、n=2として、2つのシミュレーションを並列に実行している。まず、t(i−2)までのシミュレーション結果に基づいて、交通流シミュレータによってt(i)の車両位置を求める。このt(i)の車両位置を入力として受け付けて、通信のシミュレーションおよびITSアプリケーションのシミュレーションを行う点は上記従来の手法と同様である。ここで、交通流シミュレータによってt(i)の車両位置の計算が完了した時点で交通流シミュレータが利用可能になるので、ISP1は交通流シミュレータにt(i−1)までのシミュレーション結果に基づいてt(i+1)での車両位置を計算させる。このように、ITSアプリケーションシミュレータによるシミュレーション結果を、1タイムステップ後の交通流シミュレーションに反映させるのではなく、n(図3ではn=2)タイムステップ後の交通流シミュレーションに反映させるため、パイプライン処理的にn個のシミュレーションを並列に実行できる。なお、図2では、要素シミュレータが3つのコンピュータシステムによって実行されているので、最大で3つのタイムステップに関するシミュレーションを並列に実行可能である。
【0029】
なお、ITSアプリケーションシミュレーションの結果をnタイムステップより後のシミュレーションのみに反映させるために、シミュレーション精度の低下が懸念される。この点について説明する。ITSアプリケーションは、ドライバに対して衝突の警告を発したり、車両の制御に介入したりする。しかしながら、衝突の警告を発してから、実際の車両が減速動作を開始するまでには所定の遅延がある。図4はITSアプリケーションの実行から車両動作に影響が出るまでの遅延時間を説明する図である。時刻tAで、2台の車両が接近し衝突の危険があることが路車間通信や車車間通信で判明し、ITSアプリケーション(車載機器)がドライバに警告を発した状況を考える。警告が報知されてから、ドライバがこの警告を認識し反応するまでの時間(反射時間)、アクセルからブレーキに足を踏み換える時間(踏替時間)、ブレーキを踏み込んでから実際にブレーキが効き始める
までの時間(踏込時間)の後に実際にブレーキが効き始めて車両動作に影響が現れる。これらの時間は個人によって差はあるものの、概ね、反射時間が0.4秒程度、踏替時間が0.2秒程度、踏込時間が0.1〜0.3秒であり、合計0.8秒程度の空走時間が生じる。したがって、ITSアプリケーションの動作を直後の交通流シミュレーションに反映させる必要はない。シミュレーションのタイムステップを100ミリ秒(=0.1秒)、つまり上記の遅延時間(空走時間)よりも十分短くしている場合には、ITSアプリケーションの動作を数ステップ後の交通流シミュレーションに反映させれば精度の低下はない。ここで、上記のnは、nタイムステップが上記遅延時間(ITSアプリケーションが動作してから、それが車両動作に影響を与えるまでの時間)よりも短く設定しておけば、シミュレーション精度低下の問題は発生しない。なお、ITSアプリケーションが自動制御を行い人間の操作が介入しない場合であっても、車両動作までに影響が出るまでには時間を要する。たとえば、ITSアプリケーションが車両のブレーキを自動で行う場合であっても、実際にブレーキが効き始めるには上記踏込時間と同程度の時間を要する。
【0030】
本実施形態におけるISP(統合シミュレーションプラットフォーム)1の動作を、図5のフローチャートを参照して説明する。このフローチャートは、n=2の場合を例に説明している。まず、ISP1が、時刻t(i)までのシミュレーションが終了したことを検知すると、t(i)の状態データ(車両位置等)やイベントデータを交通流シミュレータに渡して、交通流シミュレーションを実行させる(S101)。交通流シミュレータは、t(i)までの実行結果に基づいてt(i+2)の車両位置を求め、ISP1に送信する(S102)。ISP1は、t(i+2)の車両位置を状態管理データ記憶部に格納する(S103)とともに、この車両位置を通信シミュレータに渡す(S104)。通信シミュレータは、t(i+2)での車両位置における通信を模擬し、その結果をISP1に送信する(S105)。ISP1は、t(i+2)における通信結果を状態管理データ記憶部に格納する(S106)とともに、この結果をITSアプリケーションシミュレータに渡す(S107)。ITSアプリケーションシミュレータは、t(i+2)における通信結果に基づいてITSアプリケーションの動作を模擬し、ISP1に渡す(S108)。ISP1は、ITSアプリケーションの動作が車両動作に影響を与える時刻を求めて、その時刻と車両動作に与える影響の内容とを、イベントデータ記憶部に格納する(S109)。たとえば、「t(i+9)から車両が減速する」という情報を記憶しても良いし、「t(i+7)からドライバがブレーキを作動させる」という情報を記憶しても良い。ITSアプリケーションの動作が車両動作に影響を与えるまでの遅延時間は、ITSアプリの動作ごとにあらかじめ定めておいても良いし、ドライバごとに変化させるために交通流シミュレータが有するドライバモデルを参照して決定しても良い。
【0031】
なお、n個のシミュレーションを並列して実行しているため、並列に実行されるn個のシミュレーション列のそれぞれでITSアプリケーションが作動すると計算される場合がある。しかしながら、実際にはそのような車両動作に影響を与えるイベントの発生は1回のみであるため、複数回同じイベントを処理しないための仕組みが必要である。ここでは、たとえば、t(i)でイベント(たとえば、警告の報知、運転への介入)が発生した場合に、ISP1の共有データベースに、t(i)で当該イベントが発生した旨のフラグを格納する。このフラグは、所定のタイムステップ(たとえば、nタイムステップ)後までの同一イベントの発生を禁止することを示すフラグである。ITSアプリケーションシミュレータは、ITSアプリケーション動作の模擬の後、共有データベースを参照して直近のnタイムステップ以内にフラグが立っていないか検査してから、フラグが立っていない場合のみイベントデータをイベントデータ記憶部に格納する。直近のnタイムステップ以内にフラグが立っている場合は、イベントデータの格納を行わない。このようにすれば、並列に実行されるシミュレーション列のそれぞれで連続して同じイベントが発生することを防ぐことができる。
【0032】
t(i)についてのシミュレーションが終了するたびに、t(i+n)のシミュレーションを開始しているので、結局n個のシミュレーションが同時に並列して実行されることになる。なお、シミュレーション開始時点においては、直近nタイムステップ分の結果が得られていないので並列処理を実行できない。そこで、シミュレーション開始直後のnタイムステップ分に関しては、たとえば従来と同様の手法によって結果を得てから、上述したようにn個のシミュレーションを行えばよい。
【0033】
このように、統合シミュレータはn個(ここではn=2)のシミュレーションが並列に実行される。したがって、図3に示すように3つのシミュレータの空き時間を1/3まで減少させて、効率的に演算資源を用いたシミュレーションが実行できる。
【0034】
(第2の実施形態)
統合シミュレータの具体的構成例の第2の手法について、図6を参照して説明する。本実施形態では、ISP1が配置されたコンピュータシステム40と、それぞれ、交通流シミュレータ9、ネットワークシミュレータ10、電波伝搬シミュレータ11、ITSアプリケーションシミュレータ12が配置された3個のコンピュータシステム41、42、43から構成される。なお、ここでn=3の場合を例にして説明しているので、3台のコンピュータシステムが用いられている。
【0035】
本実施形態においては、各コンピュータシステムが全ての要素シミュレータを備えているため、n個のシミュレーションを完全に並行に実施することができる。本実施形態によっても、上記第1の実施形態と同様の効果が得られる。さらに、パイプライン的な並列処理では問題が生じうるハードウェア資源の競合の問題も起こらない。さらに、コンピュータシステムを増やすことで、並列実行するシミュレーションの数を容易に増やせる。もっとも、第1の実施形態で説明したようにn×1タイムステップの論理時間が、ITSアプリケーションが車両動作に影響を与える遅延時間以内となるようにする必要がある。
【0036】
(その他)
上記の説明では、シミュレーション開始直後のnタイムステップ以外は、常にn個のシミュレーションが並列に実行されるものとして説明した。しかしながら、必ずしも常にn個のシミュレーションを並列に実行しなくても構わない。たとえば、ITSアプリケーションの動作が車両動作に重大な影響を与える場合は、シミュレーション開始時と同様に並列化せずに計算するようにしても良い。より具体的には、タイムステップt(i)において特定のイベントが発生した場合には、ISP1は、並列処理によって求められているタイムステップt(i+1)以降の計算結果を破棄する。そして、タイムステップt(i)の計算結果を基に、各要素シミュレータを連携してt(i+1)の計算結果を求める。さらに、1タイムステップずつnタイムステップ分の計算を実行する。タイムステップt(i+n−1)までの計算結果が得られたら、n個のシミュレーション列を並列に動作させる処理(図5のフローチャート)を再開する。
【0037】
このようにすることで、重大なイベントが発生した場合のシミュレーション精度を向上させることができる。このような計算動作を行う場合、並列実行に伴う処理の効率化の効果が得られなくなるが、交通流マイクロシミュレーションにおいては重大なイベントが発生しない状況がほとんどである。どのようなイベントが発生したときに再計算を行うかの定義にもよるが、車両動作に大きく影響を与えるようなイベントの発生は1%以下である。したがって、99%以上の確率でシミュレーションの並列化が行え、従来の手法と比べて効率的な処理が実現可能である。
【0038】
また、上記の説明では複数のコンピュータが連携して統合シミュレータを構成する例を用いているが、たとえば、複数のプロセッサコアを有するコンピュータで上記統合シミュ
レータを構成しても構わない。ここで「複数のプロセッサコア」は、1つのCPUが複数のプロセッサコアを有する場合、複数のCPUを有する場合、1つのプロセッサコアを論理的に複数のプロセッサコアとして扱う場合(たとえば、インテル社のハイパースレッディング・テクノロジー)および、これらの組み合わせが考えられる。このようなマルチコア環境において複数の仮想マシンを構築して統合シミュレータを構成しても良い。
【0039】
また、上記の説明では、疎結合アーキテクチャを採用した統合シミュレータを例に説明しているが、本発明は各要素シミュレータを内部で密に組み合わせる密結合アーキテクチャの統合シミュレータに対しても用いることが可能である。
【符号の説明】
【0040】
1 統合シミュレーションプラットフォーム(ISP)
2 全体管理モジュール
9 交通流シミュレータ
10 ネットワークシミュレータ
11 電波伝搬シミュレータ
12 ITSアプリケーションシミュレータ
【特許請求の範囲】
【請求項1】
第1〜第N(Nは2以上の整数)の複数の要素シミュレータを連携させて、第1の要素シミュレータの計算結果に基づいて第2の要素シミュレータが計算を行い、第2の要素シミュレータの計算結果に基づいて第3の要素シミュレータが計算を行い、・・・、第N−1の要素シミュレータの計算結果に基づいて第Nの要素シミュレータが計算を行ってシミュレーション結果を得る統合シミュレータであって、
前記第1の要素シミュレータは、タイムステップtにおけるシミュレーション結果を、タイムステップt−n(nは2以上の整数)以前の前記第1〜第Nの要素シミュレータの結果に基づいて求めるものであり、
前記統合シミュレータは、タイムステップtまでのシミュレーションが完了している際に、タイムステップt+1,t+2,・・・、t+nのシミュレーション計算を並列に実行する
ことを特徴とする統合シミュレータ。
【請求項2】
前記第1〜第Nの要素シミュレータはそれぞれ個別のコンピュータシステムにおいて実行されるものである
ことを特徴とする請求項1に記載の統合シミュレータ。
【請求項3】
それぞれが前記第1〜第Nの要素シミュレータを実行可能なn個のコンピュータシステムを有しており、前記n個のシミュレーションを前記n個のコンピュータシステムにおいて並列して実行する
ことを特徴とする請求項1に記載の統合シミュレータ。
【請求項4】
車両の移動を模擬し、各時刻での車両位置を求める交通流シミュレータと、
車両の位置を入力として、ITSアプリケーションの動作を模擬し、ITSアプリケーションが車両動作に与える影響を求めるITSシミュレータと、
を備え、
交通流シミュレータによる車両位置の結果に基づいてITSアプリケーションが車両動作に与える影響を求め、該影響を交通流シミュレータに反映して車両動作を模擬することを繰り返して車両の動作を模擬する統合シミュレータであって、
前記交通流シミュレータは、タイムステップtにおける車両位置を、タイムステップt−n(nは2以上の整数)以前の前記交通流シミュレータおよび前記ITSシミュレータの結果に基づいて求めるものであり、
前記統合シミュレータは、タイムステップtまでのシミュレーションが完了している際に、タイムステップt+1,t+2、・・・、t+nにおける車両の位置およびITSが車両動作に与える影響を求めるn個のシミュレーションを並列に実行する
ことを特徴とする統合シミュレータ。
【請求項5】
前記nは、nタイムステップが、ITSアプリケーションが車両動作に影響を与える動作を行ってから、実際に車両動作に影響が出るまでの時間よりも小さくなるように定められる
ことを特徴とする請求項4に記載の統合シミュレータ。
【請求項6】
前記ITSシミュレータは、複数の要素シミュレータから構成され、
前記交通流シミュレータおよび前記複数の要素シミュレータは、それぞれ個別のコンピュータシステムにおいて実行される
ことを特徴とする請求項4または5に記載の統合シミュレータ。
【請求項7】
前記統合シミュレータは、それぞれが前記交通流シミュレータと前記ITSシミュレー
タとを実行可能なn個のコンピュータシステムを有しており、前記n個のシミュレーションを前記n個のコンピュータシステムにおいて並列して実行する
ことを特徴とする請求項4または5に記載の統合シミュレータ。
【請求項1】
第1〜第N(Nは2以上の整数)の複数の要素シミュレータを連携させて、第1の要素シミュレータの計算結果に基づいて第2の要素シミュレータが計算を行い、第2の要素シミュレータの計算結果に基づいて第3の要素シミュレータが計算を行い、・・・、第N−1の要素シミュレータの計算結果に基づいて第Nの要素シミュレータが計算を行ってシミュレーション結果を得る統合シミュレータであって、
前記第1の要素シミュレータは、タイムステップtにおけるシミュレーション結果を、タイムステップt−n(nは2以上の整数)以前の前記第1〜第Nの要素シミュレータの結果に基づいて求めるものであり、
前記統合シミュレータは、タイムステップtまでのシミュレーションが完了している際に、タイムステップt+1,t+2,・・・、t+nのシミュレーション計算を並列に実行する
ことを特徴とする統合シミュレータ。
【請求項2】
前記第1〜第Nの要素シミュレータはそれぞれ個別のコンピュータシステムにおいて実行されるものである
ことを特徴とする請求項1に記載の統合シミュレータ。
【請求項3】
それぞれが前記第1〜第Nの要素シミュレータを実行可能なn個のコンピュータシステムを有しており、前記n個のシミュレーションを前記n個のコンピュータシステムにおいて並列して実行する
ことを特徴とする請求項1に記載の統合シミュレータ。
【請求項4】
車両の移動を模擬し、各時刻での車両位置を求める交通流シミュレータと、
車両の位置を入力として、ITSアプリケーションの動作を模擬し、ITSアプリケーションが車両動作に与える影響を求めるITSシミュレータと、
を備え、
交通流シミュレータによる車両位置の結果に基づいてITSアプリケーションが車両動作に与える影響を求め、該影響を交通流シミュレータに反映して車両動作を模擬することを繰り返して車両の動作を模擬する統合シミュレータであって、
前記交通流シミュレータは、タイムステップtにおける車両位置を、タイムステップt−n(nは2以上の整数)以前の前記交通流シミュレータおよび前記ITSシミュレータの結果に基づいて求めるものであり、
前記統合シミュレータは、タイムステップtまでのシミュレーションが完了している際に、タイムステップt+1,t+2、・・・、t+nにおける車両の位置およびITSが車両動作に与える影響を求めるn個のシミュレーションを並列に実行する
ことを特徴とする統合シミュレータ。
【請求項5】
前記nは、nタイムステップが、ITSアプリケーションが車両動作に影響を与える動作を行ってから、実際に車両動作に影響が出るまでの時間よりも小さくなるように定められる
ことを特徴とする請求項4に記載の統合シミュレータ。
【請求項6】
前記ITSシミュレータは、複数の要素シミュレータから構成され、
前記交通流シミュレータおよび前記複数の要素シミュレータは、それぞれ個別のコンピュータシステムにおいて実行される
ことを特徴とする請求項4または5に記載の統合シミュレータ。
【請求項7】
前記統合シミュレータは、それぞれが前記交通流シミュレータと前記ITSシミュレー
タとを実行可能なn個のコンピュータシステムを有しており、前記n個のシミュレーションを前記n個のコンピュータシステムにおいて並列して実行する
ことを特徴とする請求項4または5に記載の統合シミュレータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−108160(P2011−108160A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2009−264990(P2009−264990)
【出願日】平成21年11月20日(2009.11.20)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願日】平成21年11月20日(2009.11.20)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]