
統合制御変速レバー装置
【課題】多様な変速モードを実現し、エンジン制御と懸架制御およびステアリング制御を可能にした、統合制御変速レバー装置を提供する。
【解決手段】手で把持して動くオートレバーがP(駐車)−R(後進)−N(中立)−D(走行)のオートモードを基本的な移動経路とし、D(走行)位置から分岐して少なくとも1つの相異なる2ケ所の位置にオートレバーの移動経路をさらに形成するゲートパターンを備え、ゲートパターンに沿って1ケ所に移動したオートレバーの位置においては、オートモード以外の変速モードのための電気信号が発生され、ゲートパターンに沿ってまた他の1ケ所に移動したオートレバーの位置においては、変速機制御とは関係なく、車両の装置を制御するためのまた他の電気信号が発生されることを特徴とする。
【解決手段】手で把持して動くオートレバーがP(駐車)−R(後進)−N(中立)−D(走行)のオートモードを基本的な移動経路とし、D(走行)位置から分岐して少なくとも1つの相異なる2ケ所の位置にオートレバーの移動経路をさらに形成するゲートパターンを備え、ゲートパターンに沿って1ケ所に移動したオートレバーの位置においては、オートモード以外の変速モードのための電気信号が発生され、ゲートパターンに沿ってまた他の1ケ所に移動したオートレバーの位置においては、変速機制御とは関係なく、車両の装置を制御するためのまた他の電気信号が発生されることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、統合制御変速レバー装置に係り、より詳しくは、車両の操作装置である変速レバーにおいて、M(スポーツ)モードの以外に付加的な多様なモードが変速レバーを利用してさらに実現されることによって、運転者の利便性を極大化した統合制御変速レバー装置に関する。
【背景技術】
【0002】
一般的に、変速レバーは手動変速機や機械式自動変速機や自動変速機の変速段を車速に合わせて変更するための操作装置であり、P(駐車)−R(後進)−N(中立)−D(走行)等の変速段を実現するためのゲートパターン(Gate Pattern)に沿って動く。
【0003】
車両の品質と商品価値に対する満足度は、自動車の走行時になされる変速操作感に大きく左右されるだけでなく、運転者の変速好みを満足させられる変速パターンにも大きく左右される。
運転者の変速好みを満足させる装置の一例として、自動変速機付き車両において、手動変速機の感覚が味わえる手動変速モード操作を可能にする、いわゆるティプトロニック(tiptronic)タイプ変速レバー装置がある。
【0004】
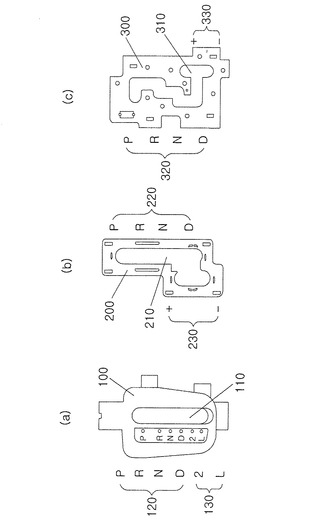
図12には、典型的なティプトロニック(tiptronic)タイプ変速レバー装置に適用されたゲートパターンを示した。
図12(a)は、インジケーティングパネル100にP(駐車)−R(後進)−N(中立)−D(走行)のオート変速モード120と2−Lの手動変速モード130が一直線上で配列されたゲートパターン110であり、図12(b)はインジケーティングパネル200にP(駐車)−R(後進)−N(中立)−D(走行)のオート変速モード220と+/−の手動変速モード230がJ形状で配列されたゲートパターン210であり、図12(c)はインジケーティングパネル300にP(駐車)−R(後進)−N(中立)−D(走行)のオート変速モード320と+/−の手動変速モード330がH形状で配列されたゲートパターン310である。
【0005】
通常、上記のオート変速モード(120,220,320)はオートモードと称し、上記の手動変速モード(130,230,330)はスポーツモードやMモードと称する。
オート変速モード(120,220,320)は、P(駐車)−R(後進)−N(中立)−D(走行)に沿って変速段が自動変速される方式であり、手動変速モード(130,230,330)は、変速レバーを自動変速機の状態で操作して運転し、運転者の意思によって現在の変速段から1速を減速または加速して固定できる方式である。
【0006】
すなわち、手動変速モード(130,230,330)時に、変速レバーをD(走行)から分岐した手動変速モード(130,230,330)に移動させると、移動した変速段を維持した走行状態となり、この状態で変速レバーを後方に引いて放せば、1段タウンシフトに減速(−)することができ、逆に、前方に押して放せば、1段アップシフトに加速(+)することができる。
この操作時において、運転者は、手動変速機とは異なり、クラッチペダルを踏んだり加速ペダルから足を離したりしないので迅速な変速応答性を感じることができるため、運転者の変速好みを満足させることができ、変速操作感と共に車両の品質と商品価値に対する満足感を大幅に高めることができる。
【0007】
しかし、運転者には、自動車からより多くの機能の提供を受けたいとの欲求があり、運転者の欲求に沿った技術の一例として、変速操作を通じて車両の品質と商品価値に対する満足度を大幅に高めたスマート変速レバーが挙げられる。
スマート変速レバーは、変速機と機械的に連結される変速レバーとは異なり、レバーの位置変化を検知するコントローラ(TCUまたはECU)と、これを動力に伝達するアクチュエータを利用するものである(例えば、特許文献1、2参照)。
【0008】
スマート変速レバーにおいても、運転者はゲートパターン(Gate Pattern)に沿って変速レバーを位置変更して所望の変速段に変更する操作を行うが、より多様で便利な付加機能を実現できる。
スマート変速レバーは全種類の変速機の操作装置として使用することができ、これを適用した代表的な例として、シフトバイワイヤ(SBW;Shift By Wire)タイプ変速システムがある(例えば、特許文献3参照)。
【0009】
上記のスマート変速レバーに適用された、多様な操作機能実現のための付加機能として、パーキングリリースアクチュエータ(PRA;Parking Release Actuator)構成を例に挙げることができる。
これは、変速レバーがゲートパターンの特定位置にある時、パーキングリリースアクチュエータ(PRA)に制御信号を送ることによって、変速機を制御するTCU故障(Fail)や始動オフまたはN段駐車/洗車/手動解除/悪意的な強制解除遮断などに対する安全性を強化する付加機能である。
【0010】
スマート変速レバーを通じて多くの機能を提供された運転者は、より多くの利便性を要望するため、スマート変速レバーにおいても、さらに多くの機能を実現して、運転者の品質と商品価値の向上要求に応じなければならないという課題を抱えている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】韓国特許公開10−2008−0021386明細書
【特許文献2】特開2009−143528号公報
【特許文献3】特開2005−67583号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
本発明は、上記の問題点を解決するためになされたものであって、その目的とするところは、多様な変速モードを実現し、かつ、オートレバーの特定のゲートパターン位置において変速モードと違った制御信号を発生させることによって、M(スポーツ)モードのダイナミックな変速操作感を感じさせ、さらにオートレバーの位置操作に応じた電気信号によりエンジン制御と懸架制御およびステアリング制御を可能にした、統合制御変速レバー装置を提供することにある。
【課題を解決するための手段】
【0013】
上記目的を達成するためになされた本発明の統合制御変速レバー装置は、手で把持して動くオートレバーがP(駐車)−R(後進)−N(中立)−D(走行)のオートモードを基本的な移動経路とし、D(走行)位置から分岐して少なくとも1つの相異なる2ケ所の位置にオートレバーの移動経路をさらに形成するゲートパターンを備え、
ゲートパターンに沿って1ケ所に移動したオートレバーの位置においては、オートモード以外の変速モードのための電気信号が発生され、
ゲートパターンに沿ってまた他の1ケ所に移動したオートレバーの位置においては、変速機制御とは関係なく、車両の装置を制御するためのまた他の電気信号が発生されることを特徴とする。
【0014】
ゲートパターンにおいては、オートモード以外の変速モードである+/−のMモードがD(走行)位置から一側位置に分岐して電気信号を発生し、車両の装置を制御するための統合モードがD(走行)位置から他方位置に分岐してまた他の電気信号を発生させることが好ましい。
Mモードは、オートレバーに連結されて共に動く変速ロッドの移動を検知するMセンサで1段アップシフト加速状態である+モードと1段タウンシフト減速状態である−モードのための電気信号を発生させ、統合モードは、オートレバーの相異なる移動位置であるE−S位置とS−E位置において各々異なる電気信号を発生させることが好ましい。
【0015】
統合モードは、オートレバーの統合モード進入に応じたエフォート(Effort)感を付与し、E−S統合モードとS−E統合モード進入位置を検知する統合モードセンサユニットと、オートレバーがE−S統合モードとS−E統合モードに移動してもD(走行)状態を維持させる走行維持ユニットと、E−S統合モードやS−E統合モード操作に応じた変速節度感を付与する節度感ユニットを利用して実現されることが好ましい。
【0016】
統合モードセンサユニットは、オートレバーの統合モード移動時にオートレバーに結合され、レバーハウジングにシフト軸を介してヒンジ結合された変速ロッドと締結される移動ブロックと、オートレバーのE−S位置からS−E位置への移動時に移動ブロックの直線移動を回転運動に切り替えると同時にE−S位置からS−E位置への移動を検出し、エフォート(Effort)感を生成するモード切り替え検出部とから構成されることが好ましい。
【0017】
モード切り替え検出部は、移動ブロックとラック−ピニオン結合されて自転する偏心カムと、偏心カムを左右両側から支持し、少なくとも一側において偏心カムの回転による位相変化により押し出されて圧縮弾性変形されることによってエフォート感を形成させる1対のローラと、偏心カムの回転による位相変化を検出して、E−S統合モードやS−E統合モードに対する電気信号を発生させるセンシング部材とから構成されることが好ましい。
【0018】
センシング部材は非接触式であることが好ましい。
センシング部材は、偏心カムに設けられて共に回転するマグネットと、マグネットの回転に応じたN−S極性変化を検知してECUに伝送する電気信号を発生する検出センサとから構成されることが好ましい。
【0019】
走行維持ユニットは、P(駐車)−R(後進)−N(中立)−D(走行)に沿って変速段を変化させるコントロールケーブルが連結され、シフト軸をヒンジ軸にしてレバーハウジングに結合された係合レバーと、オートレバーのMモード進入後、係合レバーをMモード状態に維持するM係止部材と、オートレバーの統合モード進入後、係合レバーを統合モード状態に維持する統合モード係止部材と、オートレバーに備えられたセーフティーボタンを押す時、変速ロッドとの結合を解除させることによってMモードや統合モードの進入後、D(走行)位置を維持させる連動解除部材とから構成されることが好ましい。
【0020】
M係止部材と統合モード係止部材は、変速ロッドの位置移動時、変速ロッドから力を受けて係合レバーを加圧することによってレバーハウジングに固定させるロックピンと、ロックピンが押されて移動する時に圧縮されて弾性復帰力を生成するリターンスプリングとで構成されることが好ましい。
連動解除部材は、押されたセーフティーボタンを検知したECUを通じて作動するソレノイドの作用により係合レバーと変速ロッドの結合を解除させることが好ましい。
【0021】
節度感ユニットは、変速ロッドのMモードと統合モードの移動経路においてレバーハウジングの内面部位を利用して形成されたグルーブと、グルーブに接触して動くブレットとから構成されたことが好ましい。
グルーブはD(走行)位置に対する変速節度感を形成するD溝を基準にMモードに対する変速節度感を形成するM溝と、統合モードに対する変速節度感を形成する統合モード溝とから構成され、M溝と統合モード溝はD溝に対してより深く陥没して段差を形成したことが好ましい。
ブレットは、変速ロッドの下部に形成されたブレット軸に結合され、グルーブに接触する端部をボール形状に形成されたことが好ましい。
【発明の効果】
【0022】
本発明は、多様な変速モードを実現し、かつ、M(スポーツ)モードのダイナミックな変速操作感を基本的に提供し、さらに、ゲートパターンに対するオートレバーの特定の位置変化に応じた電気信号によりエンジン制御と懸架制御およびステアリング制御を可能にすることによって、運転者により多い機能と共により良い利便性も提供できる効果がある。
また、本発明は、ゲートパターンに対するオートレバーの特定の位置変化に応じた電気信号により変速モード以外の多様な機能を実現することによって、自動車の性能と品質および商品価値をより高める効果がある。
【図面の簡単な説明】
【0023】
【図1】本発明による統合制御変速レバー装置の構成斜視図と上面図である。
【図2】本発明によるゲートパターンの構成図である。
【図3】本発明によるゲートパターンの変形例の構成図である。(a)はEタイプIのゲートパターン、(b)はD−EタイプJのゲートパターン、(c)はD−EタイプHのゲートパターンである。
【図4】本発明によるMセンサユニットの構成とMモードへの作動を示した図である。
【図5】本発明による統合モードセンサユニットの構成図である。(a)はレバーハウジングの側面図、(b)は統合モードセンサユニットの拡大図である。
【図6】本発明による統合モード切り替え時にD(走行)位置を固定させる走行維持ユニットの構成図である。(a)は、係合レバー、M係止部材、総合モード係止部材の拡大側面図、(b)は連動解除部材の拡大図である。
【図7】本発明による連動解除部材の構成と作動を示す図である。(a)は連動解除係止部材の作動を示す正面図、(b)は連動解除部材の作動図である。
【図8】本発明による、Mモードや統合モード時に変速節度感を与えるための節度感ユニットの構成図である。(a)は節度感ユニットの拡大側面図、(b)は複数の溝が形成されたグループの拡大図である。
【図9】本発明による統合モード移動とそれに応じた統合モードセンサユニットの構成と作動を示す図である。(a)は総合モードへの移動を示すオートレバーの作動図、(b)はオートレバーのE−SからS−E位置への移動を示す作動図である。
【図10】本発明による統合モード移動とそれに応じた走行維持ユニットの作動図である。(a)はM係止部材、総合モード係止部材の拡大側面図、(b)はその作動図である。
【図11】本発明によるMモード及び統合モードへの移動時の節度感ユニットの作動図である。
【図12】従来技術のシフトバイワイヤオートレバー装置に備えられたMモード実現のためのゲートパターンである。(a)はEタイプIのゲートパターン、(b)はD−EタイプJのゲートパターン、(C)はD−EタイプHのゲートパターンである。
【発明を実施するための形態】
【0024】
以下、本発明の実施形態を添付図面を参照して詳細に説明する。
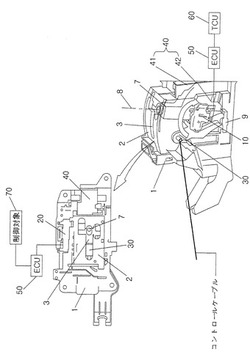
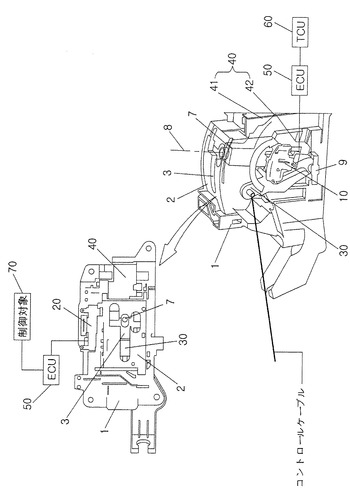
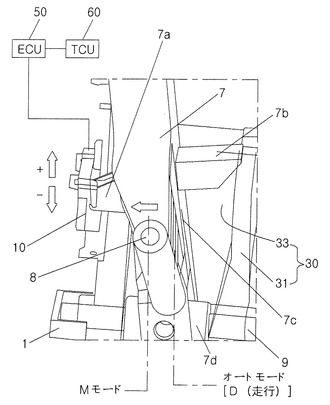
図1に、本発明による統合制御変速レバー装置の構成斜視図と上面図を示した。
図示したとおり、統合制御変速レバー装置は、運転席部位に備えられたレバーハウジング1と、ゲートパターン3のオートモードとMモードおよび統合モードに応じて位置変化する運転者操作用オートレバー8を備えた変速ロッド7と、オートレバー8のMモード位置転換過程とそれに応じたM段制御信号を発生させるMセンサユニット10と、オートレバー8の統合モード位置転換過程とそれに応じた多様な統合制御信号を発生させる統合モード実現手段と、オートレバー8のオートモードとMモード切り替えに応じた変速段に合わせてTCU(Transmission Control Unit)60を制御し、統合モード切り替え時にTCU60の制御と共に変速機以外の車両電装機器である制御対象70の制御ロジックをさらに含むECU(Engine Control Unit)50とから構成される。
【0025】
レバーハウジング1には、変速ロッド7の下部部位がシフト軸9を介してヒンジ結合される。
レバーハウジング1の上面をなすインジケーティングパネル2に形成されたゲートパターン3には、変速ロッド7に結合され、運転者が把持して操作するオートレバー8が位置する。
【0026】
オートレバー8には運転者が指で押すセーフティーボタンが備えられる。セーフティーボタンは、エンジン始動時、オートレバー8のロック状態を解除するために通常装着される装置である。
本実施形態において、セーフティーボタンは、P(駐車)−R(後進)−N(中立)−D(走行)に沿って変速段を変化させるコントロールケーブルが連結された係合レバー31とオートレバー8の連結状態を解除する。この構成の詳細については後述する。
【0027】
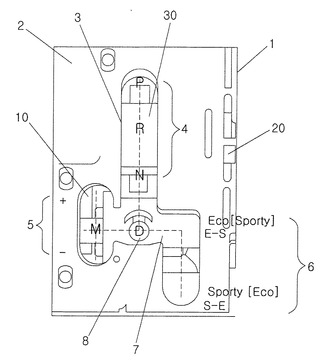
図2は、本実施形態によるゲートパターンの構成図である。
図示したとおり、ゲートパターン3は、変速段変更のためのオートモード4とMモード5を基本に備え、これとは異なる少なくとも1つの機能が提供される統合モード6をさらに備えることにより、より多様な制御機能を実現できる。
【0028】
ゲートパターン3は、P(駐車)−R(後進)−N(中立)−D(走行)のオートモード4と、オートモード4の一側面に分岐した+/−の2つの変速段を有するMモード5と、オートモード4からMモードの反対側面に分岐したE−S/S−E機能を実現する統合モード6とで形成される。
ここで、S−EはSport−Ecoを意味し、E−SはEco−Sportを意味する。
Mモード5と統合モード6はオートモード4のD(走行)から左右に分岐する。このようなゲートパターン3をD−EタイプJと称する。
【0029】
上述したとおり、オートモード4は、P(駐車)−R(後進)−N(中立)−D(走行)に沿って変速段を変速する自動変速機制御方式であり、Mモード5は、現在の変速段から1速を減速(−)または加速(+)する手動変速機制御方式であり、これは従来より実現されている方式である。
一方、統合モード6は、オートレバー8を総合モード部位に位置させて、後方に引いて放すか(S−E)または前方に押して放す(E−S)ことによって変速機以外の車両電装機器である制御対象70を制御するための電気信号を発生させる負荷機能制御方式であり、統合モード6において発生する電気信号はECU50に入力される。
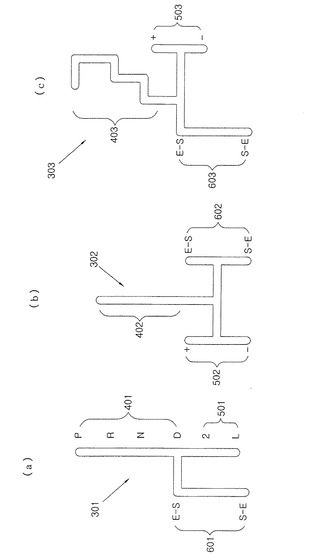
上記のゲートパターン3は多様に変形することができ、図3(a)〜(c)にその変形例を示した。
【0030】
図3(a)のゲートパターン301は、EタイプIであり、これは、P(駐車)−R(後進)−N(中立)−D(走行)のオートモード401と、オートモード401に直線上に続いた+/−のMモード501と、Mモード501の図中左側側面に位置するオートモード401のD(走行)から分岐したE−S/S−Eの統合モード601で形成される。
また、図3(b)のゲートパターン302は、D−E変形タイプJであり、これは、P(駐車)−R(後進)−N(中立)−D(走行)のオートモード402と、オートモード402のD(走行)から図中左側の側面部位に分岐した+/−のMモード502と、オートモード402のD(走行)から図中右側の側面部位に分岐してMモード502の反対側に位置したE−S/S−Eの統合モード602で形成される。
【0031】
また、図3(c)のゲートパターン303は、D−EタイプHであり、これは、P(駐車)−R(後進)−N(中立)−D(走行)のオートモード403と、オートモード403のD(走行)から図中右側の側面部位に分岐した+/−のMモード503と、オートモード403のD(走行)から図中左側の側面部位に分岐してMモード502の反対側に位置したE−S/S−Eの統合モード603で形成される。
本実施形態において、ゲートパターン(3、301、302、303)は同一の機能を実現し、必要に応じて適切に適用される。
【0032】
一方、図4に本実施形態によるMセンサユニットの構成とオートレバ−のMモードへの作動を示した。図示したとおり、Mセンサユニット10は、Mモード5を形成したレバーハウジング1に設けられ、オートレバー8が前方に押される(+)、または後方引っ張られる(−)の作動を検知し、検知されたM+やM−位置に対する電気信号をECU50に提供することによってTCU60を通じてM+またはM−変速制御が実現される。
すなわち、オートモード4のD(走行)走行中、運転者がMモード5を実現しようとすれば、オートレバー8をMモード5側に押して変速ロッド7を移動させた後、オートレバー8をM+側に軽く押すかまたはM−側に軽く引く動作が行われる。
【0033】
この時、Mセンサユニット10は、オートレバー8と結合された変速ロッド7の一側面に突出した第1レバー突起7aがM+側に移動したこと及びM−側に移動したことを検知し、Mモード5のM+であれば1段アップシフト加速状態、Mモード5のM−であれば1段タウンシフト減速状態を実現させる。
【0034】
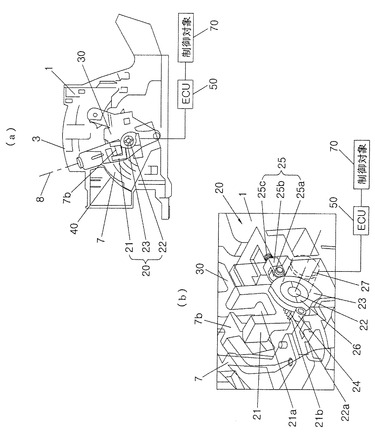
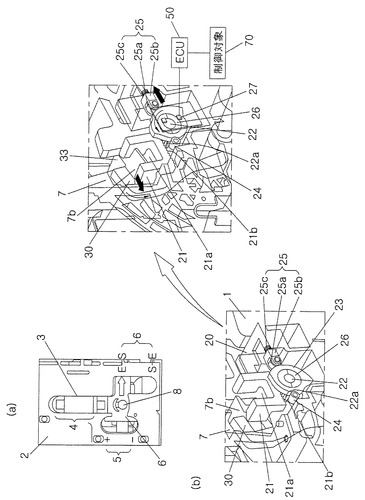
一方、図5に、本実施形態による統合モードセンサユニットの構成を示した。図示したとおり、統合モード6実現手段は、レバーハウジング1に設けられ、オートレバー8の統合モード6に進入に応じたエフォート(Effort)を付与し、E−S統合モードとS−E統合モード進入位置を検知する統合モードセンサユニット20と、オートレバー8がE−S統合モードとS−E統合モードに移動してもD(走行)状態を維持させる走行維持ユニット30と、E−S統合モードやS−E統合モード操作に応じた変速節度感を付与する節度感ユニット40とから構成される。
【0035】
E−S統合モードは、オートレバー8を前方に押して放す時に電気信号を発生させ、S−E統合モードは、オートレバー8を後方に引いて放す時に電気信号を発生させる方式であり、これは、Mモード5のM+とM−方式と同一である。
しかし、Mモード5のM+とM−電気信号はECU50を経てTCU60に出力されるのに反し、統合モード6のE−SとS−E電気信号はECU50を経て制御対象70に出力される。
この時、ECU50は、E−S電気信号とS−E電気信号を各々別個に認識することによって制御対象70に出力信号を個別に提供する。
本実施形態において、制御対象70は変速機以外の電子制御タイプ電装機器であり、一例として、ECU50に含まれた制御ロジックに応じて制御されるエンジンや電子式懸架装置や電動式ステアリング装置などが挙げられる。実際の実車適用時には、統合モード6において発生する電気信号の多様性を利用することによって全ての電子制御タイプの電装機器を制御することが可能である。
【0036】
また、統合モードセンサユニット20は、オートレバー8が統合モード6側に移動した時、オートレバー8に結合された変速ロッド7の動きに従う移動ブロック21と、オートレバー8のE−S統合モード側またはS−E統合モード側への移動に応じた移動ブロック21の直線移動を回転運動に切り替えると同時にE−S→S−E位置移動を検出し、エフォート(Effort)感を生成するモード切り替え検出部とから構成される。
移動ブロック21が変速ロッド7の動きを伝達するための構造は多様に構成することができるが、本実施形態においては、移動ブロック21に開口して形成された連動空間21aと、変速ロッド7の一側面に突出して形成された第2レバー突起7bからなる構造である。
【0037】
オートレバー8が統合モード6に移動すると、オートレバー8の動きにより、変速ロッド7の第2レバー突起7bが移動ブロック21の連動空間21aに嵌入する。
また、モード切り替え検出部は、移動ブロック21に形成されたラックギア21bと噛合するピニオン22aを備え、自転する回転軸22と、回転軸22に固定されて共に回転し、互いに対称する位置に突出部位を形成した偏心カム23と、偏心カム23の位相変化に応じた反力を生成するローラと、偏心カム23の回転による位相変化を検出し、E−S統合モードやS−E統合モードに対する電気信号を発生させるセンシング部材とから構成される。
【0038】
ローラ部材は、レバーハウジング1に設けられ、自転し、偏心カム23と直接接触する固定ローラ24と、固定ローラ24の反対側においてレバーハウジング1に設けられ、偏心カム23の位相変化に応じて、偏心カム23から押し出されたり偏心カム23に近寄ったりする可変ローラ25とから構成される。
可変ローラ25は、偏心カム23の位相変化に応じて直接的な力を受けるローラ25aと、ローラ25aが自転するようにヒンジ軸に結合したブラケット25bと、ブラケット25bを弾性支持しつつ、ブラケット25bが押された時に弾性圧縮する弾性部材25cとから構成される。
弾性部材25cはコイルスプリングで構成される。
【0039】
また、センシング部材は非接触式であって、このために偏心カム23に設けられ、偏心カム23と共に回転するマグネット26と、マグネット26の回転に応じた極性変化を検知する検出センサ27とから構成される。
これにより、検出センサ27は、カム23と共に回転するマグネット26の前面部においてマグネット26の回転に応じたN極とS極の位相変化を検知し、これを電気信号に切り替えてECU50に伝送する。
【0040】
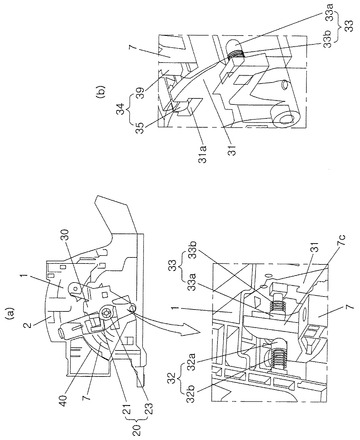
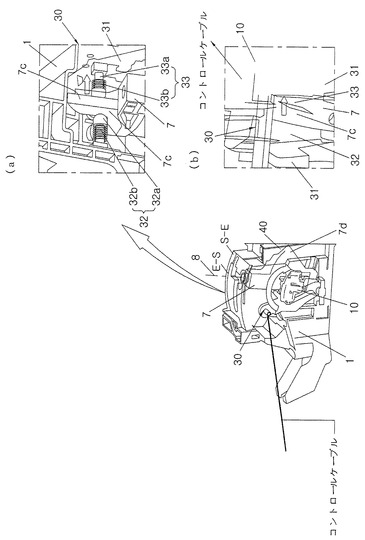
図6に、本実施形態による統合モード切り替え時にD(走行)位置を固定させる走行維持ユニットの構成を示した。
図6(a)に示したとおり、走行維持ユニット30は、オートモード4であるP(駐車)−R(後進)−N(中立)−D(走行)の変速段を変化させるコントロールケーブルと連結された係合レバー31と、オートレバー8のMモード5進入後、係合レバー31をMモード状態に維持するM係止部材32と、オートレバー8の統合モード6進入後、係合レバー31を統合モード状態に維持する統合モード係止部材33と、オートレバー8に備えられたセーフティーボタンを押す時に変速ロッド7との結合を解除させることによって、Mモード5や統合モード6の進入後、D(走行)位置を維持させる連動解除部材34とから構成される。
【0041】
また、図6(b)に示したとおり、係合レバー31は、左右両側に側面部を形成してその内部空間に変速ロッド7を収容し、連結されたコントロールケーブルを引っ張るためにシフト軸9をヒンジ軸にしてレバーハウジング1に連結される。
また、M係止部材32は、変速ロッド7がMモード5側に位置移動する時、変速ロッド7の一側の接触面7cから力を受けて係合レバー31の一側面部(図中左側)を加圧することによってレバーハウジング1に対する固定力を生成するロックピン32aと、ロックピン32aが押されて移動する時に圧縮されて弾性復帰力を生成するリターンスプリング32bとから構成される。
【0042】
統合モード係止部材33は、変速ロッド7が統合モード6側に位置移動する時、変速ロッド7の反対側の接触面7cから力を受けて係合レバー31の反対側の側面部(図中右側)を加圧することによってレバーハウジング1に対する固定力を生成するロックピン33aと、ロックピン33aが押されて移動する時に圧縮されて弾性復帰力を生成するリターンスプリング33bとから構成される。
ここで、ロックピン(32a、33a)は、その端部が係合レバー31の両側の側面部(図中左側と図中右側)に形成された溝部位に嵌合された状態を形成する。
リターンスプリング33bはコイルスプリングタイプを使用する。
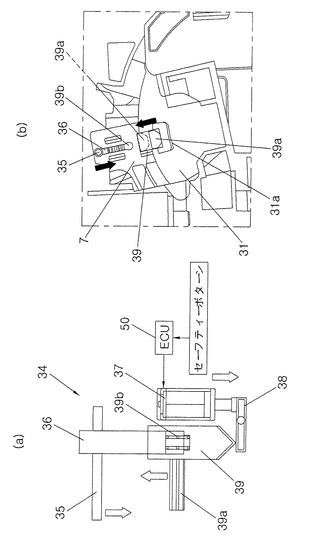
図7に、本発明によるセーフティーボタンの操作時に変速段を変化させる係合レバーとの結合状態を解除することによってMモードや統合モード切り替え後に係合レバーがD(走行)位置を維持するようにする連動解除部材の構成図を示した。
連動解除部材34は、オートレバー8に備えられたセーフティーボタンが押されて、係合レバー31と変速ロッド7の結合が解除された状態で、係合レバー31をホールドするための構成であり、従来技術として広く採用されている。
【0043】
図7(a)に示したとおり、連動解除部材34は、変速ロッド7部位において上昇/下降し、チューブ36を貫通した連動ピン35と、セーフティーボタンの操作を検知したECU50の制御によって作動されるソレノイド37と、ソレノイド37のロッド引き出し時にテコ作用によってその反対部位が上昇する連動レバー38と、下側部位が連動レバー38の動きによって上昇/下降し、上側部位にはリターンスプリング39bによって弾性支持されたチューブ36を結合した連動ロッド39と、連動ロッド39の上昇時、係合レバー31の一側面部に形成された係止溝31aから抜け出るスライド突起39aとから構成される。
ここで、スライド突起39aは通常Mセンサユニット10側に位置する。
【0044】
図7(b)に示したとおり、統合モード6の進入前、オートレバー8に備えられたセーフティーボタンが押されて連動解除部材34が作動し、統合モード6に進入した後、変速ロッド7の係合レバー31との結合が解除される。
すなわち、セーフティーボタンを押すことによって連動ピン35が下降し、それと同時にソレノイド37が作動することによって連動レバー38を通じてスライド突起39aが上昇し、これによって係合レバー31の係止溝31aから抜け出た状態に変わる。
この操作により、オートレバー8によって変速ロッド7が動いても、係合レバー31は変速ロッド7から自由な状態を維持する。
この状態でMモード5または統合モード6が実現されれば、係合レバー31は、M係止部材32や統合モード係止部材33の作用により、レバーハウジング1のブラケット部位と密着して拘束された状態に変わる。
【0045】
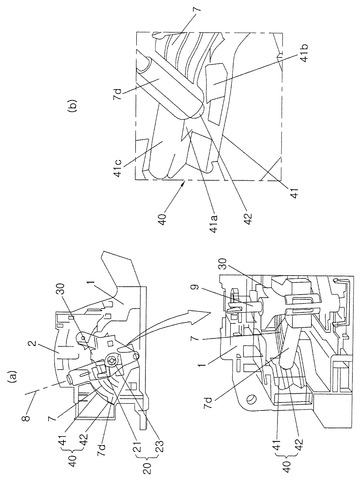
図8に、本実施形態により、Mモードや統合モード時に変速節度感を与えるための節度感ユニットの構成図を示した。
図8(a)に示したとおり、節度感ユニット40は、変速ロッド7のMモード5と統合モード6の移動経路においてレバーハウジング1の内部に形成されたグルーブ41と、グルーブ41側に向かう変速ロッド7のブレット軸7dに結合され、その末端をグルーブ41に接触させたブレット42とから構成される。
【0046】
また、グルーブ41は、オートモード4のD(走行)位置に対する節度感を形成するD溝41aと、D溝41aを基準にMモード5側に形成されたM溝41bと、D溝41aを基準に統合モード6側に形成された統合モード溝41cとから構成される。
ここで、M溝41bと統合モード溝41cは、D溝41aに対してより深く陥没して段差を形成した構造からなる。
【0047】
図8(b)に示したとおり、D溝41aはオートレバー8をD(走行)に移動させる時に変速節度感を付与し、M溝41bはMモード5からオートレバー8を移動させる時に変速節度感を付与し、統合モード溝41cは統合モード6からオートレバー8を移動させる時に変速節度感を付与する。
【0048】
M溝41bの一側端部はM+位置であり、反対側端部はM−位置であり、統合モード溝41cの一側端部はE−S位置であり、反対側端部はS−E位置である。
また、ブレット42は、グルーブ41に接触する端部をボール形状に形成することにより、グルーブ41に接触した状態でグルーブ41に沿って移動する時に摩擦抵抗を最小化できる。
【0049】
図9は、統合モード実現時のオートレバー8の移動を示し、本実施形態においては、統合モード実現時、図7を参照して説明したとおり、セーフティーボタンを押して、先ず連動解除部材34を作動させる。
上記のとおりセーフティーボタンが押されて連動解除部材34が作動すれば、図9(a)に示したとおり、D(走行)位置にあるオートレバー8を統合モード6のE−S側に移動できる。
【0050】
上記の移動操作により、オートレバー8に結合された変速ロッド7がエコモード6側に移動しながら、変速ロッド7の第2レバー突起7bも共に押し出され、移動ブロック21の連動空間21aに嵌入される。
上記のとおり、D(走行)→統合モード6のE−S移動は、グルーブ41のD溝41aから統合モード溝41cへの位置転換を意味し、これにより、運転者は変速節度感を感じることができる。
上記のD(走行)→統合モード6のE−S移動は、本実施形態のガイドパターン3に沿ったものであり、図3に示したガイドパターン(301,302,303)ではそれに合わせて構成される。
【0051】
図9(b)は、統合モード移動後E−SからS−Eに移動した時の統合モードセンサユニット20の作動状態を示したものである。図示したとおり、変速ロッド7と移動ブロック21が共に結合された状態でオートレバー8が後方に引っ張られてE−S位置からS−E位置に移動すると、移動ブロック21は、変速ロッド7の第2レバー突起7bを通じてオートレバー8の移動方向に共に動く。
この時、オートレバー8がE−S→S−E位置に移動完了する時点では、変速ロッド7の第2レバー突起7bを通じてオートレバー8の移動方向に係合レバー31も力を受けるシフト軸9をヒンジ軸とした動きをするが、このような小さい動きでは変速段を移動させるコントロールケーブルが影響を受けない。
【0052】
次に、移動ブロック21がオートレバー8の移動方向に共に動くと、回転軸22は移動ブロック21のラックギア21bに噛合したピニオン22aを介して回転し、回転軸22に固定された偏心カム23が回転軸22と同じ方向に回転することによって、偏心カム23に備えられたマグネット26のN極とS極の位相に変化が生じる。
【0053】
この偏心カム23の回転過程でカム偏心部位が可変ローラ25のローラ25aを押し出し、可変ローラ25においては弾性部材25cの圧縮変形による反力が生まれ、これにより、運転者は統合モード6がE−S→S−Eに切り替えたことを認識できる。
上記の過程において、検出センサ27は回転によるマグネット26の極性変化に応じて変化した電気信号をECU50に送出し、ECU50は、これをロジックに適用して処理した後、その結果に応じて制御対象70を制御するために算出された信号値を出力する。
【0054】
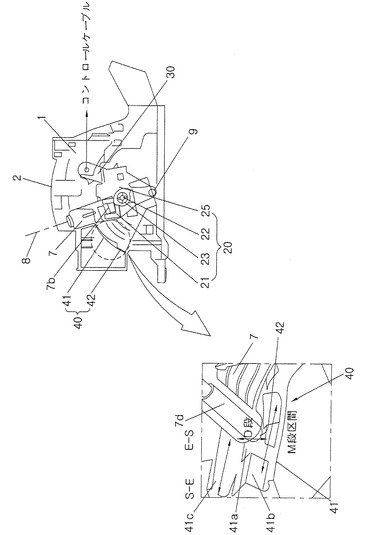
図10は、統合モード移動と移動後E−SからS−E位置に移動する時の走行維持ユニット30の作動状態を示した。
オートレバー8がD(走行)→統合モード6のE−S位置に移動すると、図10(a)に示したとおり、オートレバー8に結合された変速ロッド7はオートレバー8と同一方向に傾き、これにより、M係止部材32の反対側に位置した統合モード係止部材33は変速ロッド7の接触面7cから力を受ける。
【0055】
上記のとおり統合モード係止部材33が変速ロッド7から力を受けると、ロックピン33aはリターンスプリング33bを圧縮しつつ係合レバー31の側面部(図中右側)側を加圧し、力を受けた係合レバー31はレバーハウジング1の内部ブラケット部位に密着して固定力を形成することによってD(走行)位置に対する変化を防止できる。
一方、M係止部材32は、変速ロッド7を間に置いて統合モード係止部材33の反対側に位置し、このレイアウトにおいて、オートレバー8をMモード5側に位置移動させると、その作用は上記した統合モード係止部材33と同様になされる。
【0056】
図11に、本実施形態によるMモードや統合モード移動時の節度感ユニットの作動図を示した。
図示したとおり、オートレバー8がD(走行)位置にあれば、変速ロッド7のブレット軸7dに結合されたブレット42はD溝41aに位置することによって運転者にD(走行)変速節度感を提供する。
上記のD(走行)位置から運転者がオートレバー8をMモード5側に移動させれば、オートレバー8と共に変速ロッド7のブレット軸7dもMモード5側に移動し、ブレット42がD溝41aに乗ってM溝41b側へ移る。
この時、ブレット42はD溝41aに比べてより低い位置であるM溝41bへ移り、その過程で運転者にD(走行)→M溝41bに応じた変速節度感を提供する。
【0057】
一方、上記のD(走行)位置から運転者がオートレバー8を統合モード6側に移動させれば、オートレバー8と共に変速ロッド7のブレット軸7dも統合モード6側に移動することによって、ブレット42がD溝41aに乗って統合モード溝41c側へ移る。
この時、ブレット42はD溝41aに比べてより低い位置である統合モード溝41cへ移り、その過程で運転者にD(走行)→統合モード溝41cに応じた変速節度感を提供できる。
【0058】
上記のとおり本実施形態による統合制御変速レバー装置は、P(駐車)−R(後進)−N(中立)−D(走行)のオートモード4と共にダイナミックな変速操作感を感じることができる+/−のMモード5を基本機能として提供し、ゲートパターン3におけるオートレバー8の位置変化に応じた電気信号をECU(Engine Control Unit)50に提供する統合モード6をさらに備えることにより、運転者の簡単なオートレバー8の操作だけで変速機以外にエンジンや懸架装置やステアリング装置などに対する制御が可能である。このため、利便性を大幅に向上させることができ、特に実車適用時に自動車の性能と品質および商品価値をより高めることができる。
【符号の説明】
【0059】
1 レバーハウジング
2、100、200、300 インジケーティングパネル
3、110、210、301,302、303、310 ゲートパターン
4、120、220、320、401、402、403 オートモード(オート変速モード)
5、130、230、330、501、502、503 Mモード(スポーツモード、手動変速モード)
6、601、602、603 統合モード
7 変速ロッド
7a 第1レバー突起
7b 第2レバー突起
7c 接触面
7d ブレット軸
8 オートレバー
9 シフト軸
10 Mセンサユニット
20 統合モードセンサユニット
21 移動ブロック
21a 連動空間
21b ラックギア
22 回転軸
22a ピニオン
23 偏心カム
24 固定ローラ
25 可変ローラ
25a ローラ
25b ブラケット
25c 弾性部材
26 マグネット
27 検出センサ
30 走行維持ユニット
31 係合レバー
31a 係止溝
32 M係止部材
33 統合モード係止部材
32a、33a ロックピン
32b、33b、39b リターンスプリング
34 連動解除部材
35 連動ピン
36 チューブ
37 ソレノイド
38 連動レバー
39 連動ロッド
39a スライド突起
40 節度感ユニット
41 グルーブ
41a D溝
41b M溝
41c 統合モード溝
42 ブレット
50 ECU(Engine Control Unit)
60 TCU(Transmission Control Unit)
70 制御対象
E−S Eco−Sport
S−E Sport−Eco
【技術分野】
【0001】
本発明は、統合制御変速レバー装置に係り、より詳しくは、車両の操作装置である変速レバーにおいて、M(スポーツ)モードの以外に付加的な多様なモードが変速レバーを利用してさらに実現されることによって、運転者の利便性を極大化した統合制御変速レバー装置に関する。
【背景技術】
【0002】
一般的に、変速レバーは手動変速機や機械式自動変速機や自動変速機の変速段を車速に合わせて変更するための操作装置であり、P(駐車)−R(後進)−N(中立)−D(走行)等の変速段を実現するためのゲートパターン(Gate Pattern)に沿って動く。
【0003】
車両の品質と商品価値に対する満足度は、自動車の走行時になされる変速操作感に大きく左右されるだけでなく、運転者の変速好みを満足させられる変速パターンにも大きく左右される。
運転者の変速好みを満足させる装置の一例として、自動変速機付き車両において、手動変速機の感覚が味わえる手動変速モード操作を可能にする、いわゆるティプトロニック(tiptronic)タイプ変速レバー装置がある。
【0004】
図12には、典型的なティプトロニック(tiptronic)タイプ変速レバー装置に適用されたゲートパターンを示した。
図12(a)は、インジケーティングパネル100にP(駐車)−R(後進)−N(中立)−D(走行)のオート変速モード120と2−Lの手動変速モード130が一直線上で配列されたゲートパターン110であり、図12(b)はインジケーティングパネル200にP(駐車)−R(後進)−N(中立)−D(走行)のオート変速モード220と+/−の手動変速モード230がJ形状で配列されたゲートパターン210であり、図12(c)はインジケーティングパネル300にP(駐車)−R(後進)−N(中立)−D(走行)のオート変速モード320と+/−の手動変速モード330がH形状で配列されたゲートパターン310である。
【0005】
通常、上記のオート変速モード(120,220,320)はオートモードと称し、上記の手動変速モード(130,230,330)はスポーツモードやMモードと称する。
オート変速モード(120,220,320)は、P(駐車)−R(後進)−N(中立)−D(走行)に沿って変速段が自動変速される方式であり、手動変速モード(130,230,330)は、変速レバーを自動変速機の状態で操作して運転し、運転者の意思によって現在の変速段から1速を減速または加速して固定できる方式である。
【0006】
すなわち、手動変速モード(130,230,330)時に、変速レバーをD(走行)から分岐した手動変速モード(130,230,330)に移動させると、移動した変速段を維持した走行状態となり、この状態で変速レバーを後方に引いて放せば、1段タウンシフトに減速(−)することができ、逆に、前方に押して放せば、1段アップシフトに加速(+)することができる。
この操作時において、運転者は、手動変速機とは異なり、クラッチペダルを踏んだり加速ペダルから足を離したりしないので迅速な変速応答性を感じることができるため、運転者の変速好みを満足させることができ、変速操作感と共に車両の品質と商品価値に対する満足感を大幅に高めることができる。
【0007】
しかし、運転者には、自動車からより多くの機能の提供を受けたいとの欲求があり、運転者の欲求に沿った技術の一例として、変速操作を通じて車両の品質と商品価値に対する満足度を大幅に高めたスマート変速レバーが挙げられる。
スマート変速レバーは、変速機と機械的に連結される変速レバーとは異なり、レバーの位置変化を検知するコントローラ(TCUまたはECU)と、これを動力に伝達するアクチュエータを利用するものである(例えば、特許文献1、2参照)。
【0008】
スマート変速レバーにおいても、運転者はゲートパターン(Gate Pattern)に沿って変速レバーを位置変更して所望の変速段に変更する操作を行うが、より多様で便利な付加機能を実現できる。
スマート変速レバーは全種類の変速機の操作装置として使用することができ、これを適用した代表的な例として、シフトバイワイヤ(SBW;Shift By Wire)タイプ変速システムがある(例えば、特許文献3参照)。
【0009】
上記のスマート変速レバーに適用された、多様な操作機能実現のための付加機能として、パーキングリリースアクチュエータ(PRA;Parking Release Actuator)構成を例に挙げることができる。
これは、変速レバーがゲートパターンの特定位置にある時、パーキングリリースアクチュエータ(PRA)に制御信号を送ることによって、変速機を制御するTCU故障(Fail)や始動オフまたはN段駐車/洗車/手動解除/悪意的な強制解除遮断などに対する安全性を強化する付加機能である。
【0010】
スマート変速レバーを通じて多くの機能を提供された運転者は、より多くの利便性を要望するため、スマート変速レバーにおいても、さらに多くの機能を実現して、運転者の品質と商品価値の向上要求に応じなければならないという課題を抱えている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】韓国特許公開10−2008−0021386明細書
【特許文献2】特開2009−143528号公報
【特許文献3】特開2005−67583号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
本発明は、上記の問題点を解決するためになされたものであって、その目的とするところは、多様な変速モードを実現し、かつ、オートレバーの特定のゲートパターン位置において変速モードと違った制御信号を発生させることによって、M(スポーツ)モードのダイナミックな変速操作感を感じさせ、さらにオートレバーの位置操作に応じた電気信号によりエンジン制御と懸架制御およびステアリング制御を可能にした、統合制御変速レバー装置を提供することにある。
【課題を解決するための手段】
【0013】
上記目的を達成するためになされた本発明の統合制御変速レバー装置は、手で把持して動くオートレバーがP(駐車)−R(後進)−N(中立)−D(走行)のオートモードを基本的な移動経路とし、D(走行)位置から分岐して少なくとも1つの相異なる2ケ所の位置にオートレバーの移動経路をさらに形成するゲートパターンを備え、
ゲートパターンに沿って1ケ所に移動したオートレバーの位置においては、オートモード以外の変速モードのための電気信号が発生され、
ゲートパターンに沿ってまた他の1ケ所に移動したオートレバーの位置においては、変速機制御とは関係なく、車両の装置を制御するためのまた他の電気信号が発生されることを特徴とする。
【0014】
ゲートパターンにおいては、オートモード以外の変速モードである+/−のMモードがD(走行)位置から一側位置に分岐して電気信号を発生し、車両の装置を制御するための統合モードがD(走行)位置から他方位置に分岐してまた他の電気信号を発生させることが好ましい。
Mモードは、オートレバーに連結されて共に動く変速ロッドの移動を検知するMセンサで1段アップシフト加速状態である+モードと1段タウンシフト減速状態である−モードのための電気信号を発生させ、統合モードは、オートレバーの相異なる移動位置であるE−S位置とS−E位置において各々異なる電気信号を発生させることが好ましい。
【0015】
統合モードは、オートレバーの統合モード進入に応じたエフォート(Effort)感を付与し、E−S統合モードとS−E統合モード進入位置を検知する統合モードセンサユニットと、オートレバーがE−S統合モードとS−E統合モードに移動してもD(走行)状態を維持させる走行維持ユニットと、E−S統合モードやS−E統合モード操作に応じた変速節度感を付与する節度感ユニットを利用して実現されることが好ましい。
【0016】
統合モードセンサユニットは、オートレバーの統合モード移動時にオートレバーに結合され、レバーハウジングにシフト軸を介してヒンジ結合された変速ロッドと締結される移動ブロックと、オートレバーのE−S位置からS−E位置への移動時に移動ブロックの直線移動を回転運動に切り替えると同時にE−S位置からS−E位置への移動を検出し、エフォート(Effort)感を生成するモード切り替え検出部とから構成されることが好ましい。
【0017】
モード切り替え検出部は、移動ブロックとラック−ピニオン結合されて自転する偏心カムと、偏心カムを左右両側から支持し、少なくとも一側において偏心カムの回転による位相変化により押し出されて圧縮弾性変形されることによってエフォート感を形成させる1対のローラと、偏心カムの回転による位相変化を検出して、E−S統合モードやS−E統合モードに対する電気信号を発生させるセンシング部材とから構成されることが好ましい。
【0018】
センシング部材は非接触式であることが好ましい。
センシング部材は、偏心カムに設けられて共に回転するマグネットと、マグネットの回転に応じたN−S極性変化を検知してECUに伝送する電気信号を発生する検出センサとから構成されることが好ましい。
【0019】
走行維持ユニットは、P(駐車)−R(後進)−N(中立)−D(走行)に沿って変速段を変化させるコントロールケーブルが連結され、シフト軸をヒンジ軸にしてレバーハウジングに結合された係合レバーと、オートレバーのMモード進入後、係合レバーをMモード状態に維持するM係止部材と、オートレバーの統合モード進入後、係合レバーを統合モード状態に維持する統合モード係止部材と、オートレバーに備えられたセーフティーボタンを押す時、変速ロッドとの結合を解除させることによってMモードや統合モードの進入後、D(走行)位置を維持させる連動解除部材とから構成されることが好ましい。
【0020】
M係止部材と統合モード係止部材は、変速ロッドの位置移動時、変速ロッドから力を受けて係合レバーを加圧することによってレバーハウジングに固定させるロックピンと、ロックピンが押されて移動する時に圧縮されて弾性復帰力を生成するリターンスプリングとで構成されることが好ましい。
連動解除部材は、押されたセーフティーボタンを検知したECUを通じて作動するソレノイドの作用により係合レバーと変速ロッドの結合を解除させることが好ましい。
【0021】
節度感ユニットは、変速ロッドのMモードと統合モードの移動経路においてレバーハウジングの内面部位を利用して形成されたグルーブと、グルーブに接触して動くブレットとから構成されたことが好ましい。
グルーブはD(走行)位置に対する変速節度感を形成するD溝を基準にMモードに対する変速節度感を形成するM溝と、統合モードに対する変速節度感を形成する統合モード溝とから構成され、M溝と統合モード溝はD溝に対してより深く陥没して段差を形成したことが好ましい。
ブレットは、変速ロッドの下部に形成されたブレット軸に結合され、グルーブに接触する端部をボール形状に形成されたことが好ましい。
【発明の効果】
【0022】
本発明は、多様な変速モードを実現し、かつ、M(スポーツ)モードのダイナミックな変速操作感を基本的に提供し、さらに、ゲートパターンに対するオートレバーの特定の位置変化に応じた電気信号によりエンジン制御と懸架制御およびステアリング制御を可能にすることによって、運転者により多い機能と共により良い利便性も提供できる効果がある。
また、本発明は、ゲートパターンに対するオートレバーの特定の位置変化に応じた電気信号により変速モード以外の多様な機能を実現することによって、自動車の性能と品質および商品価値をより高める効果がある。
【図面の簡単な説明】
【0023】
【図1】本発明による統合制御変速レバー装置の構成斜視図と上面図である。
【図2】本発明によるゲートパターンの構成図である。
【図3】本発明によるゲートパターンの変形例の構成図である。(a)はEタイプIのゲートパターン、(b)はD−EタイプJのゲートパターン、(c)はD−EタイプHのゲートパターンである。
【図4】本発明によるMセンサユニットの構成とMモードへの作動を示した図である。
【図5】本発明による統合モードセンサユニットの構成図である。(a)はレバーハウジングの側面図、(b)は統合モードセンサユニットの拡大図である。
【図6】本発明による統合モード切り替え時にD(走行)位置を固定させる走行維持ユニットの構成図である。(a)は、係合レバー、M係止部材、総合モード係止部材の拡大側面図、(b)は連動解除部材の拡大図である。
【図7】本発明による連動解除部材の構成と作動を示す図である。(a)は連動解除係止部材の作動を示す正面図、(b)は連動解除部材の作動図である。
【図8】本発明による、Mモードや統合モード時に変速節度感を与えるための節度感ユニットの構成図である。(a)は節度感ユニットの拡大側面図、(b)は複数の溝が形成されたグループの拡大図である。
【図9】本発明による統合モード移動とそれに応じた統合モードセンサユニットの構成と作動を示す図である。(a)は総合モードへの移動を示すオートレバーの作動図、(b)はオートレバーのE−SからS−E位置への移動を示す作動図である。
【図10】本発明による統合モード移動とそれに応じた走行維持ユニットの作動図である。(a)はM係止部材、総合モード係止部材の拡大側面図、(b)はその作動図である。
【図11】本発明によるMモード及び統合モードへの移動時の節度感ユニットの作動図である。
【図12】従来技術のシフトバイワイヤオートレバー装置に備えられたMモード実現のためのゲートパターンである。(a)はEタイプIのゲートパターン、(b)はD−EタイプJのゲートパターン、(C)はD−EタイプHのゲートパターンである。
【発明を実施するための形態】
【0024】
以下、本発明の実施形態を添付図面を参照して詳細に説明する。
図1に、本発明による統合制御変速レバー装置の構成斜視図と上面図を示した。
図示したとおり、統合制御変速レバー装置は、運転席部位に備えられたレバーハウジング1と、ゲートパターン3のオートモードとMモードおよび統合モードに応じて位置変化する運転者操作用オートレバー8を備えた変速ロッド7と、オートレバー8のMモード位置転換過程とそれに応じたM段制御信号を発生させるMセンサユニット10と、オートレバー8の統合モード位置転換過程とそれに応じた多様な統合制御信号を発生させる統合モード実現手段と、オートレバー8のオートモードとMモード切り替えに応じた変速段に合わせてTCU(Transmission Control Unit)60を制御し、統合モード切り替え時にTCU60の制御と共に変速機以外の車両電装機器である制御対象70の制御ロジックをさらに含むECU(Engine Control Unit)50とから構成される。
【0025】
レバーハウジング1には、変速ロッド7の下部部位がシフト軸9を介してヒンジ結合される。
レバーハウジング1の上面をなすインジケーティングパネル2に形成されたゲートパターン3には、変速ロッド7に結合され、運転者が把持して操作するオートレバー8が位置する。
【0026】
オートレバー8には運転者が指で押すセーフティーボタンが備えられる。セーフティーボタンは、エンジン始動時、オートレバー8のロック状態を解除するために通常装着される装置である。
本実施形態において、セーフティーボタンは、P(駐車)−R(後進)−N(中立)−D(走行)に沿って変速段を変化させるコントロールケーブルが連結された係合レバー31とオートレバー8の連結状態を解除する。この構成の詳細については後述する。
【0027】
図2は、本実施形態によるゲートパターンの構成図である。
図示したとおり、ゲートパターン3は、変速段変更のためのオートモード4とMモード5を基本に備え、これとは異なる少なくとも1つの機能が提供される統合モード6をさらに備えることにより、より多様な制御機能を実現できる。
【0028】
ゲートパターン3は、P(駐車)−R(後進)−N(中立)−D(走行)のオートモード4と、オートモード4の一側面に分岐した+/−の2つの変速段を有するMモード5と、オートモード4からMモードの反対側面に分岐したE−S/S−E機能を実現する統合モード6とで形成される。
ここで、S−EはSport−Ecoを意味し、E−SはEco−Sportを意味する。
Mモード5と統合モード6はオートモード4のD(走行)から左右に分岐する。このようなゲートパターン3をD−EタイプJと称する。
【0029】
上述したとおり、オートモード4は、P(駐車)−R(後進)−N(中立)−D(走行)に沿って変速段を変速する自動変速機制御方式であり、Mモード5は、現在の変速段から1速を減速(−)または加速(+)する手動変速機制御方式であり、これは従来より実現されている方式である。
一方、統合モード6は、オートレバー8を総合モード部位に位置させて、後方に引いて放すか(S−E)または前方に押して放す(E−S)ことによって変速機以外の車両電装機器である制御対象70を制御するための電気信号を発生させる負荷機能制御方式であり、統合モード6において発生する電気信号はECU50に入力される。
上記のゲートパターン3は多様に変形することができ、図3(a)〜(c)にその変形例を示した。
【0030】
図3(a)のゲートパターン301は、EタイプIであり、これは、P(駐車)−R(後進)−N(中立)−D(走行)のオートモード401と、オートモード401に直線上に続いた+/−のMモード501と、Mモード501の図中左側側面に位置するオートモード401のD(走行)から分岐したE−S/S−Eの統合モード601で形成される。
また、図3(b)のゲートパターン302は、D−E変形タイプJであり、これは、P(駐車)−R(後進)−N(中立)−D(走行)のオートモード402と、オートモード402のD(走行)から図中左側の側面部位に分岐した+/−のMモード502と、オートモード402のD(走行)から図中右側の側面部位に分岐してMモード502の反対側に位置したE−S/S−Eの統合モード602で形成される。
【0031】
また、図3(c)のゲートパターン303は、D−EタイプHであり、これは、P(駐車)−R(後進)−N(中立)−D(走行)のオートモード403と、オートモード403のD(走行)から図中右側の側面部位に分岐した+/−のMモード503と、オートモード403のD(走行)から図中左側の側面部位に分岐してMモード502の反対側に位置したE−S/S−Eの統合モード603で形成される。
本実施形態において、ゲートパターン(3、301、302、303)は同一の機能を実現し、必要に応じて適切に適用される。
【0032】
一方、図4に本実施形態によるMセンサユニットの構成とオートレバ−のMモードへの作動を示した。図示したとおり、Mセンサユニット10は、Mモード5を形成したレバーハウジング1に設けられ、オートレバー8が前方に押される(+)、または後方引っ張られる(−)の作動を検知し、検知されたM+やM−位置に対する電気信号をECU50に提供することによってTCU60を通じてM+またはM−変速制御が実現される。
すなわち、オートモード4のD(走行)走行中、運転者がMモード5を実現しようとすれば、オートレバー8をMモード5側に押して変速ロッド7を移動させた後、オートレバー8をM+側に軽く押すかまたはM−側に軽く引く動作が行われる。
【0033】
この時、Mセンサユニット10は、オートレバー8と結合された変速ロッド7の一側面に突出した第1レバー突起7aがM+側に移動したこと及びM−側に移動したことを検知し、Mモード5のM+であれば1段アップシフト加速状態、Mモード5のM−であれば1段タウンシフト減速状態を実現させる。
【0034】
一方、図5に、本実施形態による統合モードセンサユニットの構成を示した。図示したとおり、統合モード6実現手段は、レバーハウジング1に設けられ、オートレバー8の統合モード6に進入に応じたエフォート(Effort)を付与し、E−S統合モードとS−E統合モード進入位置を検知する統合モードセンサユニット20と、オートレバー8がE−S統合モードとS−E統合モードに移動してもD(走行)状態を維持させる走行維持ユニット30と、E−S統合モードやS−E統合モード操作に応じた変速節度感を付与する節度感ユニット40とから構成される。
【0035】
E−S統合モードは、オートレバー8を前方に押して放す時に電気信号を発生させ、S−E統合モードは、オートレバー8を後方に引いて放す時に電気信号を発生させる方式であり、これは、Mモード5のM+とM−方式と同一である。
しかし、Mモード5のM+とM−電気信号はECU50を経てTCU60に出力されるのに反し、統合モード6のE−SとS−E電気信号はECU50を経て制御対象70に出力される。
この時、ECU50は、E−S電気信号とS−E電気信号を各々別個に認識することによって制御対象70に出力信号を個別に提供する。
本実施形態において、制御対象70は変速機以外の電子制御タイプ電装機器であり、一例として、ECU50に含まれた制御ロジックに応じて制御されるエンジンや電子式懸架装置や電動式ステアリング装置などが挙げられる。実際の実車適用時には、統合モード6において発生する電気信号の多様性を利用することによって全ての電子制御タイプの電装機器を制御することが可能である。
【0036】
また、統合モードセンサユニット20は、オートレバー8が統合モード6側に移動した時、オートレバー8に結合された変速ロッド7の動きに従う移動ブロック21と、オートレバー8のE−S統合モード側またはS−E統合モード側への移動に応じた移動ブロック21の直線移動を回転運動に切り替えると同時にE−S→S−E位置移動を検出し、エフォート(Effort)感を生成するモード切り替え検出部とから構成される。
移動ブロック21が変速ロッド7の動きを伝達するための構造は多様に構成することができるが、本実施形態においては、移動ブロック21に開口して形成された連動空間21aと、変速ロッド7の一側面に突出して形成された第2レバー突起7bからなる構造である。
【0037】
オートレバー8が統合モード6に移動すると、オートレバー8の動きにより、変速ロッド7の第2レバー突起7bが移動ブロック21の連動空間21aに嵌入する。
また、モード切り替え検出部は、移動ブロック21に形成されたラックギア21bと噛合するピニオン22aを備え、自転する回転軸22と、回転軸22に固定されて共に回転し、互いに対称する位置に突出部位を形成した偏心カム23と、偏心カム23の位相変化に応じた反力を生成するローラと、偏心カム23の回転による位相変化を検出し、E−S統合モードやS−E統合モードに対する電気信号を発生させるセンシング部材とから構成される。
【0038】
ローラ部材は、レバーハウジング1に設けられ、自転し、偏心カム23と直接接触する固定ローラ24と、固定ローラ24の反対側においてレバーハウジング1に設けられ、偏心カム23の位相変化に応じて、偏心カム23から押し出されたり偏心カム23に近寄ったりする可変ローラ25とから構成される。
可変ローラ25は、偏心カム23の位相変化に応じて直接的な力を受けるローラ25aと、ローラ25aが自転するようにヒンジ軸に結合したブラケット25bと、ブラケット25bを弾性支持しつつ、ブラケット25bが押された時に弾性圧縮する弾性部材25cとから構成される。
弾性部材25cはコイルスプリングで構成される。
【0039】
また、センシング部材は非接触式であって、このために偏心カム23に設けられ、偏心カム23と共に回転するマグネット26と、マグネット26の回転に応じた極性変化を検知する検出センサ27とから構成される。
これにより、検出センサ27は、カム23と共に回転するマグネット26の前面部においてマグネット26の回転に応じたN極とS極の位相変化を検知し、これを電気信号に切り替えてECU50に伝送する。
【0040】
図6に、本実施形態による統合モード切り替え時にD(走行)位置を固定させる走行維持ユニットの構成を示した。
図6(a)に示したとおり、走行維持ユニット30は、オートモード4であるP(駐車)−R(後進)−N(中立)−D(走行)の変速段を変化させるコントロールケーブルと連結された係合レバー31と、オートレバー8のMモード5進入後、係合レバー31をMモード状態に維持するM係止部材32と、オートレバー8の統合モード6進入後、係合レバー31を統合モード状態に維持する統合モード係止部材33と、オートレバー8に備えられたセーフティーボタンを押す時に変速ロッド7との結合を解除させることによって、Mモード5や統合モード6の進入後、D(走行)位置を維持させる連動解除部材34とから構成される。
【0041】
また、図6(b)に示したとおり、係合レバー31は、左右両側に側面部を形成してその内部空間に変速ロッド7を収容し、連結されたコントロールケーブルを引っ張るためにシフト軸9をヒンジ軸にしてレバーハウジング1に連結される。
また、M係止部材32は、変速ロッド7がMモード5側に位置移動する時、変速ロッド7の一側の接触面7cから力を受けて係合レバー31の一側面部(図中左側)を加圧することによってレバーハウジング1に対する固定力を生成するロックピン32aと、ロックピン32aが押されて移動する時に圧縮されて弾性復帰力を生成するリターンスプリング32bとから構成される。
【0042】
統合モード係止部材33は、変速ロッド7が統合モード6側に位置移動する時、変速ロッド7の反対側の接触面7cから力を受けて係合レバー31の反対側の側面部(図中右側)を加圧することによってレバーハウジング1に対する固定力を生成するロックピン33aと、ロックピン33aが押されて移動する時に圧縮されて弾性復帰力を生成するリターンスプリング33bとから構成される。
ここで、ロックピン(32a、33a)は、その端部が係合レバー31の両側の側面部(図中左側と図中右側)に形成された溝部位に嵌合された状態を形成する。
リターンスプリング33bはコイルスプリングタイプを使用する。
図7に、本発明によるセーフティーボタンの操作時に変速段を変化させる係合レバーとの結合状態を解除することによってMモードや統合モード切り替え後に係合レバーがD(走行)位置を維持するようにする連動解除部材の構成図を示した。
連動解除部材34は、オートレバー8に備えられたセーフティーボタンが押されて、係合レバー31と変速ロッド7の結合が解除された状態で、係合レバー31をホールドするための構成であり、従来技術として広く採用されている。
【0043】
図7(a)に示したとおり、連動解除部材34は、変速ロッド7部位において上昇/下降し、チューブ36を貫通した連動ピン35と、セーフティーボタンの操作を検知したECU50の制御によって作動されるソレノイド37と、ソレノイド37のロッド引き出し時にテコ作用によってその反対部位が上昇する連動レバー38と、下側部位が連動レバー38の動きによって上昇/下降し、上側部位にはリターンスプリング39bによって弾性支持されたチューブ36を結合した連動ロッド39と、連動ロッド39の上昇時、係合レバー31の一側面部に形成された係止溝31aから抜け出るスライド突起39aとから構成される。
ここで、スライド突起39aは通常Mセンサユニット10側に位置する。
【0044】
図7(b)に示したとおり、統合モード6の進入前、オートレバー8に備えられたセーフティーボタンが押されて連動解除部材34が作動し、統合モード6に進入した後、変速ロッド7の係合レバー31との結合が解除される。
すなわち、セーフティーボタンを押すことによって連動ピン35が下降し、それと同時にソレノイド37が作動することによって連動レバー38を通じてスライド突起39aが上昇し、これによって係合レバー31の係止溝31aから抜け出た状態に変わる。
この操作により、オートレバー8によって変速ロッド7が動いても、係合レバー31は変速ロッド7から自由な状態を維持する。
この状態でMモード5または統合モード6が実現されれば、係合レバー31は、M係止部材32や統合モード係止部材33の作用により、レバーハウジング1のブラケット部位と密着して拘束された状態に変わる。
【0045】
図8に、本実施形態により、Mモードや統合モード時に変速節度感を与えるための節度感ユニットの構成図を示した。
図8(a)に示したとおり、節度感ユニット40は、変速ロッド7のMモード5と統合モード6の移動経路においてレバーハウジング1の内部に形成されたグルーブ41と、グルーブ41側に向かう変速ロッド7のブレット軸7dに結合され、その末端をグルーブ41に接触させたブレット42とから構成される。
【0046】
また、グルーブ41は、オートモード4のD(走行)位置に対する節度感を形成するD溝41aと、D溝41aを基準にMモード5側に形成されたM溝41bと、D溝41aを基準に統合モード6側に形成された統合モード溝41cとから構成される。
ここで、M溝41bと統合モード溝41cは、D溝41aに対してより深く陥没して段差を形成した構造からなる。
【0047】
図8(b)に示したとおり、D溝41aはオートレバー8をD(走行)に移動させる時に変速節度感を付与し、M溝41bはMモード5からオートレバー8を移動させる時に変速節度感を付与し、統合モード溝41cは統合モード6からオートレバー8を移動させる時に変速節度感を付与する。
【0048】
M溝41bの一側端部はM+位置であり、反対側端部はM−位置であり、統合モード溝41cの一側端部はE−S位置であり、反対側端部はS−E位置である。
また、ブレット42は、グルーブ41に接触する端部をボール形状に形成することにより、グルーブ41に接触した状態でグルーブ41に沿って移動する時に摩擦抵抗を最小化できる。
【0049】
図9は、統合モード実現時のオートレバー8の移動を示し、本実施形態においては、統合モード実現時、図7を参照して説明したとおり、セーフティーボタンを押して、先ず連動解除部材34を作動させる。
上記のとおりセーフティーボタンが押されて連動解除部材34が作動すれば、図9(a)に示したとおり、D(走行)位置にあるオートレバー8を統合モード6のE−S側に移動できる。
【0050】
上記の移動操作により、オートレバー8に結合された変速ロッド7がエコモード6側に移動しながら、変速ロッド7の第2レバー突起7bも共に押し出され、移動ブロック21の連動空間21aに嵌入される。
上記のとおり、D(走行)→統合モード6のE−S移動は、グルーブ41のD溝41aから統合モード溝41cへの位置転換を意味し、これにより、運転者は変速節度感を感じることができる。
上記のD(走行)→統合モード6のE−S移動は、本実施形態のガイドパターン3に沿ったものであり、図3に示したガイドパターン(301,302,303)ではそれに合わせて構成される。
【0051】
図9(b)は、統合モード移動後E−SからS−Eに移動した時の統合モードセンサユニット20の作動状態を示したものである。図示したとおり、変速ロッド7と移動ブロック21が共に結合された状態でオートレバー8が後方に引っ張られてE−S位置からS−E位置に移動すると、移動ブロック21は、変速ロッド7の第2レバー突起7bを通じてオートレバー8の移動方向に共に動く。
この時、オートレバー8がE−S→S−E位置に移動完了する時点では、変速ロッド7の第2レバー突起7bを通じてオートレバー8の移動方向に係合レバー31も力を受けるシフト軸9をヒンジ軸とした動きをするが、このような小さい動きでは変速段を移動させるコントロールケーブルが影響を受けない。
【0052】
次に、移動ブロック21がオートレバー8の移動方向に共に動くと、回転軸22は移動ブロック21のラックギア21bに噛合したピニオン22aを介して回転し、回転軸22に固定された偏心カム23が回転軸22と同じ方向に回転することによって、偏心カム23に備えられたマグネット26のN極とS極の位相に変化が生じる。
【0053】
この偏心カム23の回転過程でカム偏心部位が可変ローラ25のローラ25aを押し出し、可変ローラ25においては弾性部材25cの圧縮変形による反力が生まれ、これにより、運転者は統合モード6がE−S→S−Eに切り替えたことを認識できる。
上記の過程において、検出センサ27は回転によるマグネット26の極性変化に応じて変化した電気信号をECU50に送出し、ECU50は、これをロジックに適用して処理した後、その結果に応じて制御対象70を制御するために算出された信号値を出力する。
【0054】
図10は、統合モード移動と移動後E−SからS−E位置に移動する時の走行維持ユニット30の作動状態を示した。
オートレバー8がD(走行)→統合モード6のE−S位置に移動すると、図10(a)に示したとおり、オートレバー8に結合された変速ロッド7はオートレバー8と同一方向に傾き、これにより、M係止部材32の反対側に位置した統合モード係止部材33は変速ロッド7の接触面7cから力を受ける。
【0055】
上記のとおり統合モード係止部材33が変速ロッド7から力を受けると、ロックピン33aはリターンスプリング33bを圧縮しつつ係合レバー31の側面部(図中右側)側を加圧し、力を受けた係合レバー31はレバーハウジング1の内部ブラケット部位に密着して固定力を形成することによってD(走行)位置に対する変化を防止できる。
一方、M係止部材32は、変速ロッド7を間に置いて統合モード係止部材33の反対側に位置し、このレイアウトにおいて、オートレバー8をMモード5側に位置移動させると、その作用は上記した統合モード係止部材33と同様になされる。
【0056】
図11に、本実施形態によるMモードや統合モード移動時の節度感ユニットの作動図を示した。
図示したとおり、オートレバー8がD(走行)位置にあれば、変速ロッド7のブレット軸7dに結合されたブレット42はD溝41aに位置することによって運転者にD(走行)変速節度感を提供する。
上記のD(走行)位置から運転者がオートレバー8をMモード5側に移動させれば、オートレバー8と共に変速ロッド7のブレット軸7dもMモード5側に移動し、ブレット42がD溝41aに乗ってM溝41b側へ移る。
この時、ブレット42はD溝41aに比べてより低い位置であるM溝41bへ移り、その過程で運転者にD(走行)→M溝41bに応じた変速節度感を提供する。
【0057】
一方、上記のD(走行)位置から運転者がオートレバー8を統合モード6側に移動させれば、オートレバー8と共に変速ロッド7のブレット軸7dも統合モード6側に移動することによって、ブレット42がD溝41aに乗って統合モード溝41c側へ移る。
この時、ブレット42はD溝41aに比べてより低い位置である統合モード溝41cへ移り、その過程で運転者にD(走行)→統合モード溝41cに応じた変速節度感を提供できる。
【0058】
上記のとおり本実施形態による統合制御変速レバー装置は、P(駐車)−R(後進)−N(中立)−D(走行)のオートモード4と共にダイナミックな変速操作感を感じることができる+/−のMモード5を基本機能として提供し、ゲートパターン3におけるオートレバー8の位置変化に応じた電気信号をECU(Engine Control Unit)50に提供する統合モード6をさらに備えることにより、運転者の簡単なオートレバー8の操作だけで変速機以外にエンジンや懸架装置やステアリング装置などに対する制御が可能である。このため、利便性を大幅に向上させることができ、特に実車適用時に自動車の性能と品質および商品価値をより高めることができる。
【符号の説明】
【0059】
1 レバーハウジング
2、100、200、300 インジケーティングパネル
3、110、210、301,302、303、310 ゲートパターン
4、120、220、320、401、402、403 オートモード(オート変速モード)
5、130、230、330、501、502、503 Mモード(スポーツモード、手動変速モード)
6、601、602、603 統合モード
7 変速ロッド
7a 第1レバー突起
7b 第2レバー突起
7c 接触面
7d ブレット軸
8 オートレバー
9 シフト軸
10 Mセンサユニット
20 統合モードセンサユニット
21 移動ブロック
21a 連動空間
21b ラックギア
22 回転軸
22a ピニオン
23 偏心カム
24 固定ローラ
25 可変ローラ
25a ローラ
25b ブラケット
25c 弾性部材
26 マグネット
27 検出センサ
30 走行維持ユニット
31 係合レバー
31a 係止溝
32 M係止部材
33 統合モード係止部材
32a、33a ロックピン
32b、33b、39b リターンスプリング
34 連動解除部材
35 連動ピン
36 チューブ
37 ソレノイド
38 連動レバー
39 連動ロッド
39a スライド突起
40 節度感ユニット
41 グルーブ
41a D溝
41b M溝
41c 統合モード溝
42 ブレット
50 ECU(Engine Control Unit)
60 TCU(Transmission Control Unit)
70 制御対象
E−S Eco−Sport
S−E Sport−Eco
【特許請求の範囲】
【請求項1】
手で把持して動くオートレバーがP(駐車)−R(後進)−N(中立)−D(走行)のオートモードを基本的な移動経路とし、前記D(走行)位置から分岐して少なくとも1つの相異なる2ケ所の位置に前記オートレバーの移動経路をさらに形成するゲートパターンを備え、
前記ゲートパターンに沿って1ケ所に移動した前記オートレバーの位置においては、前記オートモード以外の変速モードのための電気信号が発生され、
前記ゲートパターンに沿ってまた他の1ケ所に移動した前記オートレバーの位置においては、変速機制御とは関係なく、車両の装置を制御するためのまた他の電気信号が発生されることを特徴とする統合制御変速レバー装置。
【請求項2】
前記ゲートパターンにおいては、前記オートモード以外の変速モードである+/−のMモードがD(走行)位置から一側位置に分岐して電気信号を発生し、車両の装置を制御するための統合モードがD(走行)位置から他方位置に分岐してまた他の電気信号を発生させることを特徴とする請求項1に記載の統合制御変速レバー装置。
【請求項3】
前記Mモードは、前記オートレバーに連結されて共に動く変速ロッドの移動を検知するMセンサで1段アップシフト加速状態である+モードと1段タウンシフト減速状態である−モードのための電気信号を発生させ、前記統合モードは、前記オートレバーの相異なる移動位置であるE−S位置とS−E位置において各々異なる電気信号を発生させることを特徴とする請求項2に記載の統合制御変速レバー装置。
【請求項4】
前記統合モードは、前記オートレバーの前記統合モード進入に応じたエフォート(Effort)感を付与し、E−S統合モードと前記S−E統合モード進入位置を検知する統合モードセンサユニットと、前記オートレバーが前記E−S統合モードと前記S−E統合モードに移動してもD(走行)状態を維持させる走行維持ユニットと、前記E−S統合モードや前記S−E統合モード操作に応じた変速節度感を付与する節度感ユニットを利用して実現されることを特徴とする請求項3に記載の統合制御変速レバー装置。
【請求項5】
前記統合モードセンサユニットは、前記オートレバーの前記統合モード移動時に前記オートレバーに結合され、レバーハウジングにシフト軸を介してヒンジ結合された前記変速ロッドと締結される移動ブロックと、前記オートレバーのE−S位置からS−E位置への移動時に前記移動ブロックの直線移動を回転運動に切り替えると同時にE−S位置からS−E位置への移動を検出し、エフォート(Effort)感を生成するモード切り替え検出部とから構成されることを特徴とする請求項4に記載の統合制御変速レバー装置。
【請求項6】
前記モード切り替え検出部は、前記移動ブロックとラック−ピニオン結合されて自転する偏心カムと、前記偏心カムを左右両側から支持し、少なくとも一側において前記偏心カムの回転による位相変化により押し出されて圧縮弾性変形されることによってエフォート感を形成させる1対のローラと、前記偏心カムの回転による位相変化を検出して、前記E−S統合モードや前記S−E統合モードに対する電気信号を発生させるセンシング部材とから構成されることを特徴とする請求項5に記載の統合制御変速レバー装置。
【請求項7】
前記センシング部材は非接触式であることを特徴とする請求項6に記載の統合制御変速レバー装置。
【請求項8】
前記センシング部材は、前記偏心カムに設けられて共に回転するマグネットと、前記マグネットの回転に応じたN−S極性変化を検知してECUに伝送する電気信号を発生する検出センサとから構成されることを特徴とする請求項7に記載の統合制御変速レバー装置。
【請求項9】
前記走行維持ユニットは、P(駐車)−R(後進)−N(中立)−D(走行)に沿って変速段を変化させるコントロールケーブルが連結され、前記シフト軸をヒンジ軸にして前記レバーハウジングに結合された係合レバーと、前記オートレバーの前記Mモード進入後、前記係合レバーを前記Mモード状態に維持するM係止部材と、前記オートレバーの前記統合モード進入後、前記係合レバーを前記統合モード状態に維持する統合モード係止部材と、前記オートレバーに備えられたセーフティーボタンを押す時、前記変速ロッドとの結合を解除させることによって前記Mモードや前記統合モードの進入後、D(走行)位置を維持させる連動解除部材とから構成されることを特徴とする請求項4に記載の統合制御変速レバー装置。
【請求項10】
前記M係止部材と前記統合モード係止部材は、前記変速ロッドの位置移動時、前記変速ロッドから力を受けて前記係合レバーを加圧することによって前記レバーハウジングに固定させるロックピンと、前記ロックピンが押されて移動する時に圧縮されて弾性復帰力を生成するリターンスプリングとで構成されることを特徴とする請求項9に記載の統合制御変速レバー装置。
【請求項11】
前記連動解除部材は、押された前記セーフティーボタンを検知した前記ECUを通じて作動するソレノイドの作用により前記係合レバーと前記変速ロッドの結合を解除させることを特徴とする請求項9に記載の統合制御変速レバー装置。
【請求項12】
前記節度感ユニットは、前記変速ロッドの前記Mモードと前記統合モードの移動経路において前記レバーハウジングの内面部位を利用して形成されたグルーブと、前記グルーブに接触して動くブレットとから構成されたことを特徴とする請求項4に記載の統合制御変速レバー装置。
【請求項13】
前記グルーブは、D(走行)位置に対する変速節度感を形成するD溝を基準に前記Mモードに対する変速節度感を形成するM溝と、前記統合モードに対する変速節度感を形成する統合モード溝とから構成されることを特徴とする請求項12に記載の統合制御変速レバー装置。
【請求項14】
前記M溝と前記統合モード溝は、前記D溝に対してより深く陥没して段差を形成したことを特徴とする請求項13に記載の統合制御変速レバー装置。
【請求項15】
前記ブレットは、前記変速ロッドの下部に形成されたブレット軸に結合されたことを特徴とする請求項13に記載の統合制御変速レバー装置。
【請求項16】
前記ブレットは、前記グルーブに接触する端部をボール形状に形成されたことを特徴とする請求項15に記載の統合制御変速レバー装置。
【請求項1】
手で把持して動くオートレバーがP(駐車)−R(後進)−N(中立)−D(走行)のオートモードを基本的な移動経路とし、前記D(走行)位置から分岐して少なくとも1つの相異なる2ケ所の位置に前記オートレバーの移動経路をさらに形成するゲートパターンを備え、
前記ゲートパターンに沿って1ケ所に移動した前記オートレバーの位置においては、前記オートモード以外の変速モードのための電気信号が発生され、
前記ゲートパターンに沿ってまた他の1ケ所に移動した前記オートレバーの位置においては、変速機制御とは関係なく、車両の装置を制御するためのまた他の電気信号が発生されることを特徴とする統合制御変速レバー装置。
【請求項2】
前記ゲートパターンにおいては、前記オートモード以外の変速モードである+/−のMモードがD(走行)位置から一側位置に分岐して電気信号を発生し、車両の装置を制御するための統合モードがD(走行)位置から他方位置に分岐してまた他の電気信号を発生させることを特徴とする請求項1に記載の統合制御変速レバー装置。
【請求項3】
前記Mモードは、前記オートレバーに連結されて共に動く変速ロッドの移動を検知するMセンサで1段アップシフト加速状態である+モードと1段タウンシフト減速状態である−モードのための電気信号を発生させ、前記統合モードは、前記オートレバーの相異なる移動位置であるE−S位置とS−E位置において各々異なる電気信号を発生させることを特徴とする請求項2に記載の統合制御変速レバー装置。
【請求項4】
前記統合モードは、前記オートレバーの前記統合モード進入に応じたエフォート(Effort)感を付与し、E−S統合モードと前記S−E統合モード進入位置を検知する統合モードセンサユニットと、前記オートレバーが前記E−S統合モードと前記S−E統合モードに移動してもD(走行)状態を維持させる走行維持ユニットと、前記E−S統合モードや前記S−E統合モード操作に応じた変速節度感を付与する節度感ユニットを利用して実現されることを特徴とする請求項3に記載の統合制御変速レバー装置。
【請求項5】
前記統合モードセンサユニットは、前記オートレバーの前記統合モード移動時に前記オートレバーに結合され、レバーハウジングにシフト軸を介してヒンジ結合された前記変速ロッドと締結される移動ブロックと、前記オートレバーのE−S位置からS−E位置への移動時に前記移動ブロックの直線移動を回転運動に切り替えると同時にE−S位置からS−E位置への移動を検出し、エフォート(Effort)感を生成するモード切り替え検出部とから構成されることを特徴とする請求項4に記載の統合制御変速レバー装置。
【請求項6】
前記モード切り替え検出部は、前記移動ブロックとラック−ピニオン結合されて自転する偏心カムと、前記偏心カムを左右両側から支持し、少なくとも一側において前記偏心カムの回転による位相変化により押し出されて圧縮弾性変形されることによってエフォート感を形成させる1対のローラと、前記偏心カムの回転による位相変化を検出して、前記E−S統合モードや前記S−E統合モードに対する電気信号を発生させるセンシング部材とから構成されることを特徴とする請求項5に記載の統合制御変速レバー装置。
【請求項7】
前記センシング部材は非接触式であることを特徴とする請求項6に記載の統合制御変速レバー装置。
【請求項8】
前記センシング部材は、前記偏心カムに設けられて共に回転するマグネットと、前記マグネットの回転に応じたN−S極性変化を検知してECUに伝送する電気信号を発生する検出センサとから構成されることを特徴とする請求項7に記載の統合制御変速レバー装置。
【請求項9】
前記走行維持ユニットは、P(駐車)−R(後進)−N(中立)−D(走行)に沿って変速段を変化させるコントロールケーブルが連結され、前記シフト軸をヒンジ軸にして前記レバーハウジングに結合された係合レバーと、前記オートレバーの前記Mモード進入後、前記係合レバーを前記Mモード状態に維持するM係止部材と、前記オートレバーの前記統合モード進入後、前記係合レバーを前記統合モード状態に維持する統合モード係止部材と、前記オートレバーに備えられたセーフティーボタンを押す時、前記変速ロッドとの結合を解除させることによって前記Mモードや前記統合モードの進入後、D(走行)位置を維持させる連動解除部材とから構成されることを特徴とする請求項4に記載の統合制御変速レバー装置。
【請求項10】
前記M係止部材と前記統合モード係止部材は、前記変速ロッドの位置移動時、前記変速ロッドから力を受けて前記係合レバーを加圧することによって前記レバーハウジングに固定させるロックピンと、前記ロックピンが押されて移動する時に圧縮されて弾性復帰力を生成するリターンスプリングとで構成されることを特徴とする請求項9に記載の統合制御変速レバー装置。
【請求項11】
前記連動解除部材は、押された前記セーフティーボタンを検知した前記ECUを通じて作動するソレノイドの作用により前記係合レバーと前記変速ロッドの結合を解除させることを特徴とする請求項9に記載の統合制御変速レバー装置。
【請求項12】
前記節度感ユニットは、前記変速ロッドの前記Mモードと前記統合モードの移動経路において前記レバーハウジングの内面部位を利用して形成されたグルーブと、前記グルーブに接触して動くブレットとから構成されたことを特徴とする請求項4に記載の統合制御変速レバー装置。
【請求項13】
前記グルーブは、D(走行)位置に対する変速節度感を形成するD溝を基準に前記Mモードに対する変速節度感を形成するM溝と、前記統合モードに対する変速節度感を形成する統合モード溝とから構成されることを特徴とする請求項12に記載の統合制御変速レバー装置。
【請求項14】
前記M溝と前記統合モード溝は、前記D溝に対してより深く陥没して段差を形成したことを特徴とする請求項13に記載の統合制御変速レバー装置。
【請求項15】
前記ブレットは、前記変速ロッドの下部に形成されたブレット軸に結合されたことを特徴とする請求項13に記載の統合制御変速レバー装置。
【請求項16】
前記ブレットは、前記グルーブに接触する端部をボール形状に形成されたことを特徴とする請求項15に記載の統合制御変速レバー装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−32134(P2013−32134A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2011−258645(P2011−258645)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(591251636)現代自動車株式会社 (1,064)
【出願人】(500518050)起亞自動車株式会社 (449)
【出願人】(507140276)エスエル株式会社 (13)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(591251636)現代自動車株式会社 (1,064)
【出願人】(500518050)起亞自動車株式会社 (449)
【出願人】(507140276)エスエル株式会社 (13)
【Fターム(参考)】
[ Back to top ]