
統合制御装置及びこれを備えた船舶
【課題】2機の蒸気タービンを有し各蒸気タービンによって駆動される2本の推進軸の回転数を同期させることができる統合制御装置とこれを備えた船舶を提供する。
【解決手段】蒸気タービン3A,3Bと、蒸気タービンに接続された推進軸19A,19Bと、蒸気タービンに蒸気を供給する蒸気発生装置14A,14Bと、蒸気タービンを制御する主機制御装置22A,22Bと、を各々有した2つの推進装置1A,1Bを統合制御する統合制御装置2であって、各推進装置の運転状況と、各推進装置の出力と、各推進軸の回転数と、のいずれかに応じて、各蒸気タービンの制御を行うように各主機制御装置を制御することを特徴とする。
【解決手段】蒸気タービン3A,3Bと、蒸気タービンに接続された推進軸19A,19Bと、蒸気タービンに蒸気を供給する蒸気発生装置14A,14Bと、蒸気タービンを制御する主機制御装置22A,22Bと、を各々有した2つの推進装置1A,1Bを統合制御する統合制御装置2であって、各推進装置の運転状況と、各推進装置の出力と、各推進軸の回転数と、のいずれかに応じて、各蒸気タービンの制御を行うように各主機制御装置を制御することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、統合制御装置及びこれを備えた船舶について、特に、2機2軸の蒸気タービン船の回転数同期制御に関するものである。
【背景技術】
【0002】
一般に、プロペラを回転させる推進軸と、推進軸を駆動する推進用蒸気タービンとを各々2つ有する2機2軸の蒸気タービン船において、推進用蒸気タービンに蒸気を供給する蒸気発生装置と、推進用蒸気タービンを制御する主機遠隔制御装置とは、各々2つ備えられている。これら推進用蒸気タービン、蒸気発生装置、推進軸、主機遠隔制御装置等を含めた推進装置は、各軸で互いに独立している。2機2軸の蒸気タービンの制御については、特許文献1にターニング時における回転数同期操作を自動で行う発明が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−108803号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、蒸気タービンの通常運転時においては、各蒸気タービンに蒸気を供給するボイラ等の蒸気発生装置の特性の差異や不具合により一方の蒸気タービンの出力が低下し両推進軸の回転数を同期させることができないという問題があった。
特許文献1に開示されている発明は、ターニング時の同期装置についてであり、通常運転時における回転数の自動同期については開示されていない。
【0005】
本発明は、このような事情に鑑みてなされたものであって、2機の蒸気タービンを有し各蒸気タービンによって駆動される2本の推進軸の回転数を同期させることができる統合制御装置とこれを備えた船舶を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の統合制御装置及びこれを備えた船舶は以下の手段を採用する。
すなわち、本発明に係る統合制御装置は、蒸気タービンと、該蒸気タービンに接続された推進軸と、前記蒸気タービンに蒸気を供給する蒸気発生装置と、前記蒸気タービンを制御する主機制御装置と、を各々有した2つの推進装置を統合制御する統合制御装置であって、各前記推進装置の運転状況と、各前記推進装置の出力と、各前記推進軸の回転数と、のいずれかに応じて、各前記蒸気タービンの制御を行うように各前記主機制御装置を制御することを特徴とする。
【0007】
推進装置の運転状況と、推進装置の出力と、推進軸の回転数とのいずれかに応じて、統合制御装置から各主機制御装置へと各蒸気タービンの運転を制御する信号が送信されるので、蒸気タービン毎に運転を制御することができる。従って、両推進軸の回転数を同期させることが可能となる。
【0008】
さらに、本発明に係る統合制御装置は、各前記推進軸の回転数を指示回転数に一致するように増減速させる回転数制御とするように各前記主機制御装置を制御することを特徴とする。
【0009】
各蒸気タービンを回転数制御することとした。そのため、指示回転数に対応した蒸気量を供給した際に各推進軸の回転数が指示回転数以下になった場合でも、さらに蒸気量を供給することによって各推進軸の回転数を指示回転数に一致させるように増速させることができる。また、指示回転数に対応した蒸気量を供給した際に各推進軸の回転数が指示回転数以上になった場合には、蒸気量の供給を減少させることによって各推進軸の回転数を指示回転数に一致させるように減速させることができる。従って、指示回転数が両推進軸で同じ場合には、両推進軸の回転数を同期させることができる。
【0010】
さらに、本発明に係る統合制御装置は、前記推進装置の一方が停止し指示出力が低下した場合には、一方の前記主機制御装置によって停止した一方の前記蒸気タービンの運転を停止させ、他方の前記主機制御装置によって指示出力に一致するように他方の前記蒸気タービンの出力を増加または減少させる出力制御とすることを特徴とする。
【0011】
一方の蒸気タービンの損傷や推進装置等に不具合が発生し一方の推進装置を停止させなければならない場合には、一方の主機制御装置によって一方の蒸気タービンを停止させ、他方の主機制御装置に他方の蒸気タービンを両推進装置運転時の指示回転数相当の指示出力に一致するように出力を増加または減少させる出力制御とする信号を送信することとした。そのため、他方の蒸気タービンを有する他方の推進装置によって両推進装置運転時の指示回転数相当の指示出力を発生させることが可能となる。
【0012】
また、両推進装置に不具合が生じていない場合であっても、一方の蒸気タービンを停止させて他方の推進装置によって両推進装置運転時の指示回転数相当の指示出力を発生させることが可能となる。両蒸気タービンを部分負荷運転する場合と比べて、一方の蒸気タービンを高負荷で運転する場合には、運転している蒸気タービンのタービン性能が良くなる。そのため、蒸気タービンの燃料消費を低減することができる。従って燃料コストの削減を図ることができる。
【0013】
さらに、本発明に係る統合制御装置によれば、各前記推進装置は、各前記蒸気タービンの他端に軸発電機を有し、各前記推進装置の出力に応じて、各前記軸発電機の電力の出力先の制御と、各前記主機制御装置によって各前記蒸気タービンの出力を増加または減少させる出力制御とすることを特徴とする。
【0014】
軸発電機により発生された電力の出力先を制御する(例えば、出力先として他方の推進装置側の軸発電機)こととしたので、負荷が不足している推進装置側の軸発電機に電力を供給することができる(この場合、電力を供給された側の軸発電機は電動機として作動する)。そのため、負荷が不足している推進装置を加勢することができる。さらに、統合制御装置は、両主機制御装置に各推進用蒸気タービンを出力制御するように信号を送信することとした。従って、各推進装置の出力を同期させることができ、両推進軸の回転数を同期させることができる。
なお、軸発電機は、電力を供給する場合には発電機として作動し、電力を供給された場合には電動機(モータ)として作動する。
【0015】
さらに、本発明に係る統合制御装置によれば、各前記蒸気発生装置は、再熱器を有し、各前記蒸気タービンは、再熱タービンとされ、前記再熱器が停止した場合には、各前記主機制御装置が各前記蒸気タービンを規定回転数に一致するように回転数を減速させ、回転数制御を行うことを特徴とする。
【0016】
再熱器をバイパスしなければならい程度の重篤な不具合が生じた場合には、再熱タービン内に供給される主蒸気と再熱器から供給される過熱蒸気との熱量に差が生じ、再熱タービン内の温度分布に偏りが生じる。そのため、再熱タービンから蒸気漏れが発生する恐れがある。しかし、統合制御装置は、再熱タービンを規定回転数に一致するように減速させ、回転数制御するように主機制御装置を制御することとした。そのため、再熱タービン内に供給される蒸気量が絞られて主蒸気と再熱器から供給される過熱蒸気との熱量の差が小さくなり、再熱タービン内の温度分布の偏りが小さくなる。従って、再熱タービンの安全な運転が可能となる。
なお、規定回転数とは、船舶の港湾航行速度に応じた回転数をいう。
【0017】
また、本発明に係る船舶は、上記のいずれかに記載の前記統合制御装置を備えたことを特徴とする。
【0018】
両推進軸の回転数を同期させることができるので、操船者の負担の軽減を図ることができ、船舶の推進効率を向上することが可能となる。また、一方の推進装置の損傷時には、他方の推進装置によって運航が可能であるため運航に対する信頼性を維持することが可能となる。
【発明の効果】
【0019】
推進装置の運転状況と、推進装置の出力と、推進軸の回転数とのいずれかに応じて、統合制御装置から各主機制御装置へと各蒸気タービンの運転を制御する信号が送信されるので、蒸気タービン毎に運転を制御することができる。従って、両推進軸の回転数を同期させることが可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態に係る統合制御装置を備えた推進装置の概略構成図である。
【図2】船舶の港湾航行中における図1に示した統合制御装置の制御を示すフローチャートである。
【図3】船舶の外洋航行中における図1に示した統合制御装置の制御を示すフローチャートである。
【図4】第2実施形態に係る図1に示した右舷側の推進装置が停止した場合の推進装置の概略構成図である。
【図5】図4に示した統合制御装置の制御を示すフローチャートである。
【図6】第3実施形態に係る図1に示した右舷側の再熱器が停止した場合の推進装置の概略構成図である。
【図7】図6に示した統合制御装置の制御を示すフローチャートである。
【図8】第4実施形態に係る図1に示した両再熱器が停止した場合の推進装置の概略構成図である。
【図9】船舶の外洋航行中における図8に示した統合制御装置の制御を示すフローチャートである。
【発明を実施するための形態】
【0021】
[第1実施形態]
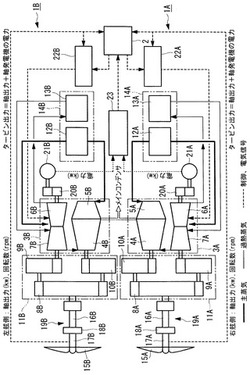
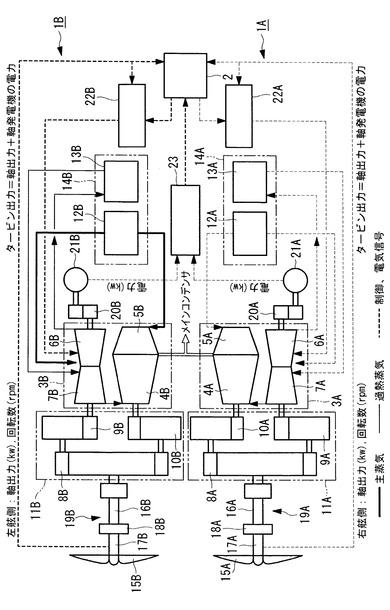
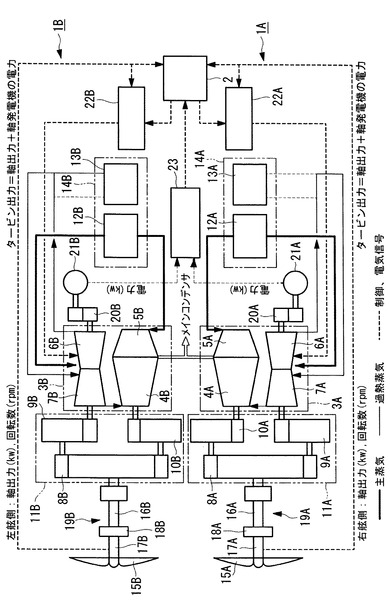
図1には、本発明の第1実施形態に係る統合制御装置を備えた推進装置の概略構成図が示されている。
本実施形態に係る蒸気タービン船は、2つ(右舷用、左舷用)の推進装置1A,1Bと、1つの統合制御装置2とを備えている。
推進装置1A,1Bは、甲板下の機関室(図示せず)内に設置されている。各推進装置1A,1Bは、それぞれ推進用蒸気タービン(蒸気タービン)3A,3Bと、減速機11A,11Bと、蒸気発生装置14A,14Bと、推進軸19A,19Bと、軸発電機(軸発電機)21A,21Bと、主機遠隔制御装置(主機制御装置)22A,22Bとを備えている。両推進装置1A,1B間には、1つの電力制御システム23が電気的に接続されている。
【0022】
推進用蒸気タービン3A,3Bは、再熱タービンであり、前進用低圧タービン4A,4Bと、前進用高圧タービン6A,6Bと、前進用中圧タービン7A,7Bと、後進用タービン5A,5Bとを備えている。前進用低圧タービン4Aと、前進用高圧タービン6Aと、前進用中圧タービン7Aとは、1機の主機を構成している。同様に、前進用低圧タービン4Bと、前進用高圧タービン6Bと、前進用中圧タービン7Bとは、1機の主機を構成している。主機は、前進用低圧タービン4A,4Bと後進用タービン5A,5Bとが一本のタービン軸(図示せず)を介して連結されている。前進用高圧タービン6A,6Bと前進用中圧タービン7A,7Bとは、一本のタービン軸(図示せず)を介して連結されている。また、前進用高圧タービン6A,6Bの船首側には、軸発電機21A,21Bが接続されている。
推進用蒸気タービン3A,3Bには、供給される蒸気量を調整するノズル弁(図示せず)が設けられ、ノズル弁には昇速・減速を検知するリフトセンサ(図示せず)が備えられている。
【0023】
減速機11A,11Bは、高圧タービン側第1減速機9A,9Bと、低圧タービン側第1減速機10A,10Bと、第2減速機8A,8Bとを備えている。高圧タービン側第1減速機9A,9Bと、低圧タービン側第1減速機10A,10Bと、第2減速機8A,8Bとは推進用蒸気タービン3A,3Bの船尾側に備えられている。高圧タービン側第1減速機9A,9Bには、前進用中圧タービン7A,7Bのタービン軸が接続されている。低圧タービン側第1減速機10A,10Bには、前進用低圧タービン4A,4Bのタービン軸が接続されている。高圧タービン側第1減速機9A,9B及び低圧タービン側第1減速機10A,10Bの他端には、第2減速機8A,8Bが接続されている。
【0024】
蒸気発生装置14A,14Bは、主ボイラ12A,12Bと、再熱器13A,13Bとを備えている。
推進軸19A,19Bは、中間軸16A,16Bと、プロペラ軸17A,17Bと、クラッチ18A,18Bとを有している。中間軸16A,16Bは、第2減速機8A,8Bに接続されている。さらに、中間軸16A,16Bの他端には、クラッチ18A,18Bを介してプロペラ軸17A,17Bが接続されている。クラッチ18A,18Bは、嵌脱することによってプロペラ軸17A,17Bと中間軸16A,16Bとの間を切り離し又は嵌合する。プロペラ軸17A,17Bの他端には、固定ピッチプロペラであるプロペラ15A,15Bが設けられている。
プロペラ軸17A,17Bには、回転数発信器(図示せず)及び出力検出器(図示せず)が備えられている。
軸発電機21A,21Bは、推進用蒸気タービン3A,3Bの船首側に減速機20A,20Bを介して接続されている。
【0025】
主機遠隔制御装置22A,22Bは、機関室内に設けられた機関制御室(図示せず)に備えられている。主機遠隔制御装置22A,22Bには、プロペラ軸17A,17Bに設けられている回転数発信器及び出力検出器よりプロペラ軸17A,17Bの回転数(以下「実回転数」という)及び軸出力(以下「実軸出力」という)の信号と、軸発電機21A,21Bが発生あるいは消費する電力の信号と、統合制御装置2からの操作信号(運転情報)とが入力される。
主機遠隔制御装置22A,22Bは、推進用蒸気タービン3A,3Bに設けられているノズル弁の弁リフトを制御することによって推進用蒸気タービン3A,3Bの始動、停止、前後進、増減速の制御を行う。また、主機遠隔制御装置22A,22Bは、指示回転数または指示出力に応じた推進用蒸気タービン3A,3Bのノズル弁の指示弁リフトを算出する中央演算処理装置(図示せず)を有している。
主機遠隔制御装置22A,22Bは、中央演算処理装置によって、操船者が発信する操作信号に対応する各プロペラ軸17A,17Bの指示回転数を算出する。さらに、中央演算処理装置は、指示回転数および指示出力に対応した推進用蒸気タービン3A,3Bのノズル弁の指示弁リフトを算出する。また、中央演算処理装置は、操船者が発信する操作信号に応じた各推進用蒸気タービン3A,3Bの指示出力を算出する。
主機遠隔制御装置22A,22Bは、船舶が港湾航行中は、操船者が発信する操作信号より算出される指示回転数に一致するように推進用蒸気タービン3A,3Bに供給される蒸気量を制御して各推進用蒸気タービン3A,3Bの回転数を増減速させる回転数制御を行う。また、主機遠隔制御装置22A,22Bは、船舶が外洋航行中は、操船者が発信する操作信号より算出される推進用蒸気タービン3A,3Bのノズル弁の指示弁リフトに一致するように各推進用蒸気タービン3A,3Bのノズル弁が制御される弁リフト制御を行う。しかし、選択される制御方法によって、主機遠隔制御装置22A,22Bは、弁リフト制御、回転数制御、推進装置1A,1Bの合計出力や軸発電機21A,21Bにより発生あるいは消費される電力やプロペラ軸17A,17Bの軸出力から算出される指示出力に一致するように推進用蒸気タービン3A,3Bに蒸気量を供給する出力制御を行う。
【0026】
電力制御システム(PMS:Power Management System)23は、機関制御室内に設けられている。電力制御システム23は、軸発電機21A,21B及び機関室内に設けられている発電機(図示せず)によって発生された電力の監視、制御、保護を行っている。電力制御システム23は、機関室内に設置されている補機類(図示せず)の駆動電源や船内照明等の船内電力へと電力を振り分けている。
【0027】
統合制御装置2は、機関制御室に設置されている中央制御盤(図示せず)内に設けられている。統合制御装置2には、プロペラ軸17A,17Bに設けられている回転数発信器及び出力検出器から得られる実回転数及び実軸出力の信号と、軸発電機21A,21Bが発生あるいは消費する電力の信号と、推進装置1A,1Bの運転情報とが入力される。
【0028】
次に、船舶の前進時における推進装置1A,1Bの運転方法について説明する。
主ボイラ12A,12Bで発生した主蒸気は、ノズル弁を介して前進用高圧タービン6A,6Bに供給される。前進用高圧タービン6A,6Bに流入した主蒸気は、ノズル(図示せず)内を流動中に、その保有する熱エネルギが運動エネルギに変換され、高速流動の蒸気となる。この高速流動の蒸気は、タービン翼(図示せず)に作用して前進用高圧タービン6A,6Bのタービン軸を回転駆動させる。
【0029】
前進用高圧タービン6A,6Bを通過した蒸気は、再熱器13A,13Bに導かれる。再熱器13A,13Bに導かれた蒸気は、再過熱され飽和温度以上に熱せられて過熱蒸気にされる。過熱蒸気は、前進用中圧タービン7A,7Bに供給される。
【0030】
前進用中圧タービン7A,7Bには、再熱器13A,13Bから過熱蒸気が導かれる。前進用中圧タービン7A,7Bに供給された過熱蒸気は、前進用高圧タービン6A,6Bと同様に、ノズル(図示せず)内を流動中に、その保有する熱エネルギが運動エネルギに変換され、高速流動の蒸気となる。この高速流動の蒸気は、タービン翼(図示せず)に作用して前進用高圧タービン6A,6Bのタービン軸をさらに回転駆動させる。前進用中圧タービン7A,7Bを通過した蒸気は、前進用低圧タービン4A,4Bに導かれる。
【0031】
前進用低圧タービン4A,4Bに導かれた蒸気は、前進用高圧タービン6A,6B及び前進用中圧タービン7A,7Bと同様に、ノズル(図示せず)内を流動中にその保有する熱エネルギが運動エネルギに変換され、高速流動の蒸気となる。この高速流動の蒸気は、タービン翼(図示せず)に作用して前進用低圧タービン4A,4Bのタービン軸を回転駆動させる。
【0032】
前進用高圧タービン6A,6B及び前進用中圧タービン7A,7Bによって駆動されたタービン軸の出力は、高圧タービン側第1減速機9A,9Bによって低下される。前進用低圧タービン4A,4Bのタービン軸の出力は、低圧タービン側第1減速機10A,10Bによって低下される。高圧タービン側第1減速機9A,9B及び低圧タービン側第1減速機10A,10Bの出力は、第2減速機8A,8Bに伝達される。第2減速機8A,8Bにより、高圧タービン側第1減速機9A,9B及び低圧タービン側第1減速機10A,10Bの出力は、合成されて1つの出力となる。1つになった出力は、第2減速機8A,8Bにおいてさらに低下される。
低下された出力は、中間軸16A,16Bに伝達される。中間軸16A,16Bに伝達された出力は、クラッチ18A,18Bが嵌合状態の場合にはプロペラ軸17A,17Bに伝達される。中間軸16A,16Bからプロペラ軸17A,17Bへと出力が伝達されることによりプロペラ15A,15Bが回転駆動され推力が発生する。一方、クラッチ18A,18Bが脱状態の場合には、中間軸16A,16Bの出力はプロペラ軸17A,17Bへと伝達されない。プロペラ軸17A,17Bに出力が伝達されないためプロペラ15A,15Bが回転駆動されず推力が発生しない。また、クラッチ18A,18Bが脱状態の場合には、プロペラ15A,15Bが空転しても空転の影響が推進用蒸気タービン3A,3Bには伝達されない。
【0033】
船首側の減速機20A,20Bは、前進用高圧タービン6A,6B及び前進用中圧タービン7A,7Bのタービン軸が回転駆動されることによって駆動される。船首側の減速機20A,20Bが駆動されることにより軸発電機21A,21Bが駆動される。これによって、軸発電機21A,21Bは電力を発生する発電機として作動する。また、軸発電機21A,21Bは、電力を供給されることによって出力加勢のための電動機(モータ)として作動することもできる。
【0034】
次に、図2に基づいて、船舶が港湾航行中に操船者が発する船速度指示に応じたプロペラ軸の実回転数が得られない場合における制御について説明する。
操船者は、船橋(図示せず)に設置されている制御盤(図示せず)に設けられているエンジンテレグラフ(図示せず)によって船速度指示の操作信号を発信する(S1)。発信された操作信号は、中央制御盤内に設けられている統合制御装置2(図1参照)に送信される。各推進装置1A,1Bは、船舶の長期間の航行によりプロペラ15A,15Bへの汚れの付着や、各蒸気発生装置14A,14Bの蒸気発生状況等の差異により、操船者の発する船速度指示の操作信号に応じた指示回転数にまでプロペラ軸17A,17Bの実回転数が達しないことがある。統合制御装置2は、両主機遠隔制御装置22A,22Bへ各推進用蒸気タービン3A,3Bを回転数制御によって制御するように信号を送信する(S2)。主機遠隔制御装置22A,22Bは、操船者が発信する操作信号から算出される指示回転数に一致するように推進用蒸気タービン3A,3Bに供給される蒸気量を制御して推進用蒸気タービン3A,3Bを増減速させる回転数制御を行う。各主機遠隔制御装置22A,22Bは、操作信号に応じた指示回転数を算出し、各推進用蒸気タービン3A,3Bのノズル弁へ回転数の指示信号を送信する(S3,S3’)。各推進用蒸気タービン3A,3Bのノズル弁は、回転数の指示信号に応じて各推進用蒸気タービン3A,3Bを増減速させるように開度が制御される。また、各プロペラ軸17A,17Bの実回転数と実軸出力との信号は、中央制御盤に設けられている統合制御装置2に送信される(S4,S4’)。各推進用蒸気タービン3A,3Bのノズル弁の制御は、各プロペラ軸17A,17Bの実回転数が指示回転数に一致するようにステップS4,S4’が繰り返される(S5,S5’)。各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後、各プロペラ軸17A,17Bの実回転数と実軸出力との信号は、中央制御盤(S6,S6’)と各主機遠隔制御装置22B,22Aとに送信される(S7,S7’)。
【0035】
なお、各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後も、各プロペラ軸17A,17Bの実回転数および実軸出力は逐次監視され、指示回転数と実回転数とに偏差が生じた場合には、指示回転数に一致するように各プロペラ軸17A,17Bの実回転数を増減速させるように回転数制御が行われる。
【0036】
次に、図3に基づいて、船舶が外洋航行中に操船者が発する船速度指示の操作信号に応じたプロペラ軸の実回転数が得られない場合における制御について説明する。
操船者は、船橋に設置されている制御盤に設けられているエンジンテレグラフによって船速度指示の操作信号を発信する(S11)。発信された操作信号は中央制御盤内に設けられている統合制御装置2へ送信される。各推進装置1A,1Bは、船舶の長期間の航行によりプロペラ15A,15Bへの汚れの付着や、各蒸気発生装置14A,14Bの蒸気発生状況等の差異により操船者の発する船速度指示に応じた指示回転数にプロペラ軸17A,17Bの実回転数まで達さないことがある。統合制御装置2は、両主機遠隔制御装置22A,22Bへ操船者が発信する操作信号から算出される推進用蒸気タービン3A,3Bのノズル弁の指示弁リフトによって各推進用蒸気タービン3A,3Bの増減速を制御する弁リフト制御を行った後、各推進用蒸気タービン3A,3Bを回転数制御によって制御するように信号を送信する(S12)。
【0037】
各主機遠隔制御装置22A,22Bは、制御方法としてまず弁リフト制御を行う。各主機遠隔制御装置22A,22Bは、操作信号に応じた指示弁リフトを算出し、各推進用蒸気タービン3A,3Bのノズル弁へ弁リフトの指示信号を送信する(S13,S13’)。各推進用蒸気タービン3A,3Bのノズル弁は、弁リフトの指示信号に応じて各推進用蒸気タービン3A,3Bを増減速させるように開度が制御される(S14,S14’)。各推進用蒸気タービン3A,3Bのノズル弁の制御は、弁リフトが指示弁リフトに一致するようにステップS14,S14’が繰り返される(S15,S15’)。各推進用蒸気タービン3A,3Bのノズル弁の弁リフトが指示弁リフトに達した後、各主機遠隔制御装置22A,22Bは、各推進用蒸気タービン3A,3Bの制御方法として回転数制御を行う(S16,S16’)。各主機遠隔制御装置22A,22Bは、操作信号に応じた指示回転数を算出する。各推進用蒸気タービン3A,3Bのノズル弁は、回転数の指示信号に応じて各推進用蒸気タービン3A,3Bを増減速させるように制御される(S17,S17’)。各推進用蒸気タービン3A,3Bのノズル弁の制御は、各プロペラ軸17A,17Bの実回転数が指示回転数に一致するようにステップS17,S17’が繰り返される(S18,S18’)。各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後、各プロペラ軸17A,17Bの実回転数と実軸出力と各軸発電機21A,21Bが発生する電力の信号とが中央制御盤(S19,19’)と各主機遠隔制御装置22A,22Bとに送信される(S20,S20’)。
【0038】
なお、各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後も、各プロペラ軸17A,17Bの実回転数および実軸出力は逐次監視され、指示回転数と実回転数とに偏差が生じた場合には、指示回転数に一致するように各プロペラ軸17A,17Bの実回転数を増減速させる回転数制御が行われる。
【0039】
以上の通り、本実施形態に係る統合制御装置2及びこれを備えた船舶によれば、以下の作用効果を奏する。
プロペラ15A,15Bへの汚れの付着や、各蒸気発生装置14A,14Bの蒸気発生状況等の差異(推進装置の運転状況)に応じて、統合制御装置2から各主機遠隔制御装置22A,22Bへと各推進用蒸気タービン3A,3Bの運転を制御する信号が送信されるので、推進用蒸気タービン3A,3B毎に運転を制御することができる。従って、両プロペラ軸17A,17Bの実回転数を同期させることが可能となる。
【0040】
外洋航行中に各プロペラ軸17A,17Bの実回転数が指示回転数にまで達さない場合には、各推進用蒸気タービン3A,3Bを弁リフト制御した後に回転数制御することとした。そのため、指示回転数に対応した蒸気量を供給しても各プロペラ軸17A,17Bの実回転数が指示回転数以下になった場合であっても、さらに各推進用蒸気タービン3A,3Bのノズル弁の制御を行う(蒸気量を供給する)ことによって各プロペラ軸17A,17Bの実回転数を指示回転数に一致させるように増速させることができる。また、指示回転数に対応した蒸気量を供給した際に各プロペラ軸17A,17Bの実回転数が指示回転数以上になった場合には、各推進用蒸気タービン3A,3Bのノズル弁の制御をする(蒸気量の供給を減少させる)ことによって各プロペラ軸17A,17Bの実回転数を指示回転数に一致させるように減速させることができる。従って、指示回転数が両プロペラ軸17A,17Bで同じ場合には、両プロペラ軸17A,17Bの実回転数を同期させることができる。
【0041】
また、各プロペラ軸17A,17Bの実回転数が規定回転数(港湾航行モード上限船速相当の回転数)以下で運転される港湾航行では、各推進用蒸気タービン3A,3Bは回転数制御によって継続制御される。そのため、指示回転数に対応した蒸気量を供給しても各プロペラ軸17A,17Bの実回転数が指示回転数以下になった場合であっても、さらに各推進用蒸気タービン3A,3Bのノズル弁の制御を行うことによって各プロペラ軸17A,17Bの実回転数を指示回転数に一致させるように増速させることができる。また、指示回転数に対応した蒸気量を供給した際に各プロペラ軸17A,17Bの実回転数が指示回転数以上になった場合には、各推進用蒸気タービン3A,3Bのノズル弁の制御をすることによって各プロペラ軸17A,17Bの実回転数を指示回転数に一致させるように減速させることができる。従って、指示回転数が両プロペラ軸17A,17Bで同じ場合には、両プロペラ軸17A,17Bの実回転数を同期させることができる。
【0042】
また、潮流や波風などの影響により、各プロペラ軸17A,17Bの実回転数が上昇しすぎる(追い回し)の場合でも、各推進用蒸気タービン3A,3Bのノズル弁を制御して蒸気量を減少させることによって各プロペラ軸17A,17Bの実回転数を指示回転数に向けて減速させることができる。したがって、両プロペラ軸17A,17Bの実回転数を同期させることができる。
【0043】
両プロペラ軸17A,17Bの実回転数を同期させることができるので、操船者の負担の軽減を図ることができ、船舶の推進効率を向上することが可能となる。
【0044】
なお、本実施形態では、クラッチ18A,18Bを用いて説明したが、本発明はこれに限定されるものではなく、クラッチ18A,18Bを設けずプロペラ15A,15Bを可変ピッチプロペラとしても良い。
また、蒸気発生装置14A,14Bとして主ボイラ12A,12Bと再熱器13A,13Bとして説明したが、主ボイラ12A,12Bのみとし推進用蒸気タービン3A,3Bを非再熱タービンとしても良い。
【0045】
[第2実施形態]
以下、本発明の第2実施形態について説明する。本実施形態の船舶および統合制御装置を備えている推進装置の構成と運転方法は、右舷側の推進装置が停止している点において第1実施形態と相違し、その他は同様である。したがって、同一の構成および運転方法については、同一の符号を付してその説明を省略する。
【0046】
図4には、図1に示した推進装置1A,1Bのうち右舷側の推進装置1Aが停止していることが示されている。
右舷側の推進用蒸気タービン3Aの損傷や推進軸19Aの損傷等の場合には、右舷側の推進装置1Aの運転が停止される。また、右舷側の推進装置1Aが停止した場合には、右舷側のプロペラ15Aがつれ廻りによって空転することがある。プロペラ15Aが空転すると、右舷側の推進用蒸気タービン3Aに影響を及ぼす恐れが生じる。そのため、プロペラ15Aの空転による推進用蒸気タービン3Aへの影響を防止するため、中間軸16Aに設けられているクラッチ18Aは脱状態にされる。
【0047】
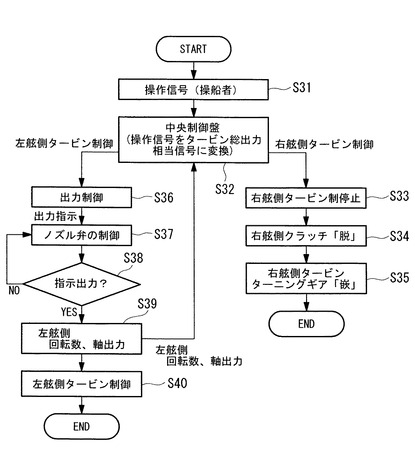
次に、図5に基づいて、船舶が航行中に右舷側の推進装置が停止した場合における制御について説明する。
操船者は、船橋に設置されている制御盤に設けられているエンジンテレグラフによって船速度指示の操作信号を発信する(S31)。発信された操作信号は、中央制御盤内に設けられている統合制御装置2に送信される。統合制御装置2は、右舷側の主機遠隔制御装置22Aへ右舷側の推進用蒸気タービン3Aを停止する信号を送信する(S32)。右舷側の主機遠隔制御装置22Aは、右舷側の推進用蒸気タービン3Aの制御を停止する(S33)。操船者は、制御盤から右舷側のクラッチ18Aを脱状態にする(S34)。右舷側のクラッチ18Aが脱状態になった後、右舷側の推進用蒸気タービン3Aに備えられているターニングギア(図示せず)が嵌合される(S35)。
【0048】
この後、船舶は、左舷側の推進装置1Bのみによって運転される。そのため、左舷側の推進用蒸気タービン3Bを弁リフト制御又は回転数制御のまま制御したのでは、両推進装置1A,1Bが運転した場合における指示回転数相当のタービン総出力の半分の出力での運転となる。そのため、船舶は、操作信号による指示弁リフトあるいは指示回転数相当の船速を得ることができない。そこで統合制御装置2は、操作信号を両推進装置1A,1B運転時の指示回転数相当のタービン総出力(指示出力)信号に変換する。変換されたタービン総出力の信号は、左舷側の主機遠隔制御装置22Bに送信される。左舷側の主機遠隔制御装置22Bには、統合制御装置2から出力制御によって制御するように信号が送信される(S32)。左舷側の主機遠隔制御装置22Bは、左舷側の推進用蒸気タービン3Bの制御方法として出力制御を行う(S36)。左舷側の主機遠隔制御装置22Bは、左舷側の推進用蒸気タービン3Bのノズル弁へ出力の指示信号を送信する。推進用蒸気タービン3Bのノズル弁は、出力の指示信号に応じて左舷側の推進用蒸気タービン3Bを増減速させるように開度が制御される(S37)。左舷側の推進用蒸気タービン3Bのノズル弁の制御は、左舷側の推進蒸気タービン3Bの出力が指示出力であるタービン総出力に一致するようにステップS37が繰り返される(S38)。左舷側の推進用蒸気タービン3Bの出力が指示出力にまで達した後、左舷側のプロペラ軸17Bの実回転数と実軸出力との信号が、中央制御盤(S39)と左舷側の主機遠隔制御装置22Bとに送信される(S40)。
【0049】
なお、左舷側のプロペラ軸17Bの実回転数が指示回転数にまで達した後も、左舷側のプロペラ軸17Bの実回転数および実軸出力は逐次監視され、指示回転数と実回転数とに偏差が生じた場合には、指示回転数に一致するように左舷側のプロペラ軸17Bの実回転数を増減速させる出力制御が行われる。
【0050】
以上の通り、本実施形態に係る統合制御装置2及びこれを備えた船舶によれば、以下の作用効果を奏する。
右舷側(一方)の推進用蒸気タービン3Aの損傷や推進装置1A等に不具合が発生し右舷側の推進装置1Aを停止させなければならない場合には、右舷側の主機遠隔制御装置22Aによって右舷側の推進用蒸気タービン3Aを停止し、左舷側(他方)の主機遠隔制御装置22Bに左舷側の推進用蒸気タービン3Bを両推進装置1A,1B運転時の指示回転数相当のタービン総出力(指示出力)に一致するように出力を増加または減少させる出力制御とする信号を送信することとした。そのため、左舷側の推進用蒸気タービン3Bを有する左舷側の推進装置1Bによって両推進装置1A,1B運転時の指示回転数相当のタービン総出力を発生させることが可能となる。
【0051】
但し、左舷側の推進用蒸気タービン3Bにて発生し得る出力は、両推進装置1A,1B運転時の合計出力の約50%となるため、左舷側の主機遠隔制御装置22Bへの指示回転数またはタービン総出力には上限を設ける必要がある。
【0052】
また、両推進装置1A,1Bに不具合が生じていない場合であっても、一方の推進用蒸気タービン3A又は3Bを停止させて他方の推進装置1A又は1Bによって両推進装置1A,1B運転時の指示回転数相当のタービン総出力を発生させることが可能となる。両推進用蒸気タービン3A,3Bを部分負荷で運転する場合と比べて、右舷側の推進装置1A又は左舷側の推進装置1Bのどちらか一方を高負荷で運転する場合には、運転している蒸気タービン3A又は3Bのタービン性能が良くなる。そのため、蒸気タービン3A,3Bの燃料消費を低減することができる。従って燃料コストの削減を図ることができる。
【0053】
また、船舶は、右舷側の推進装置1Aの損傷時には、左舷側の推進装置1Bによって運航が可能であるため運航に対する信頼性を維持することが可能となる。
【0054】
[第3実施形態]
以下、本発明の第3実施形態について説明する。本実施形態の船舶および統合制御装置を備えている推進装置の構成及び運転方法は、右舷側の再熱器が停止し右舷側の軸発電機が電動機として作動している点において第1実施形態と相違し、その他は同様である。したがって、同一の構成については、同一の符号を付してその説明を省略する。
【0055】
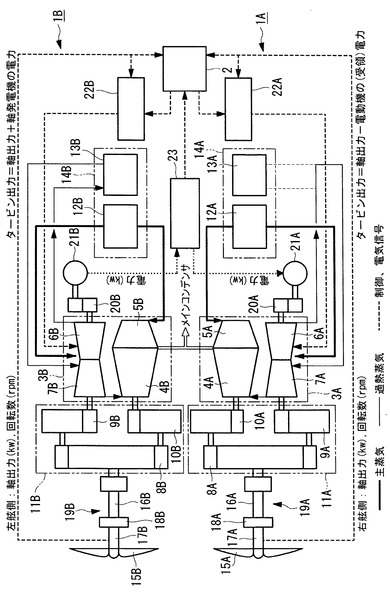
図6には、図1に示した推進装置1A,1Bのうち右舷側の再熱器13Aが停止し再熱器13Aに接続されている過熱蒸気供給ラインがバイパスされていることが示されている。
右舷側の再熱器13Aに設けられているバーナ(図示せず)が失火等した場合には、右舷側の再熱器13Aの運転は停止される。右舷側の再熱器13Aが停止しているため、右舷側の推進用蒸気タービン3Aの前進用中圧タービン7Aには、再熱器13Aから過熱蒸気が供給されない。そのため、右舷側の前進用中圧タービン7Aに供給される熱量が減少し、右舷側の高圧タービン側第1減速機9Aに伝達される出力が低下する。右舷側の高圧タービン側第1減速機9Aに伝達される出力が低下するので、右舷側の高圧タービン側第1減速機9Aに接続されている右舷側の第2減速機8Aに伝達される出力が低下する。低下した出力は、第2減速機8Aを介して右舷側の推進軸19Aに伝達される。従って、右舷側のクラッチ18Aが嵌合している場合には、右舷側のプロペラ軸17Aの実回転数と実軸出力とが低下する。
【0056】
また、右舷側の前進用低圧タービン4Aに供給される熱量も減少するため、右舷側の低圧タービン側第1減速機10Aに伝達される出力が低下する。右舷側の低圧タービン側第1減速機10Aに伝達される出力が低下するので、右舷側の低圧タービン側第1減速機10Aに接続されている右舷側の第2減速機8Aに伝達される出力が低下する。低下した出力は、第2減速機8Aを介して右舷側の推進軸19Aに伝達される。従って、右舷側のクラッチ18Aが嵌合している場合には、右舷側のプロペラ軸17Aの実回転数と実軸出力とが低下する。
【0057】
また、右舷側の前進用中圧タービン7Aに供給される熱量が減少するので、右舷側の前進用中圧タービン7A及び前進用高圧タービン6Aに接続されているタービン軸の出力が低下する。タービン軸の出力が低下するので、タービン軸の船首側に接続されている減速機20Aの出力が低下する。減速機20Aの出力が低下するので、減速機20Aに接続されている軸発電機21Aが発生する電力も低下する。
【0058】
なお、左舷側の推進装置1Bは、供給される蒸気の熱量に変化がないため左舷側のプロペラ軸17Bの実回転数、実軸出力、軸発電機21Bが発生する電力に変化は生じない。
【0059】
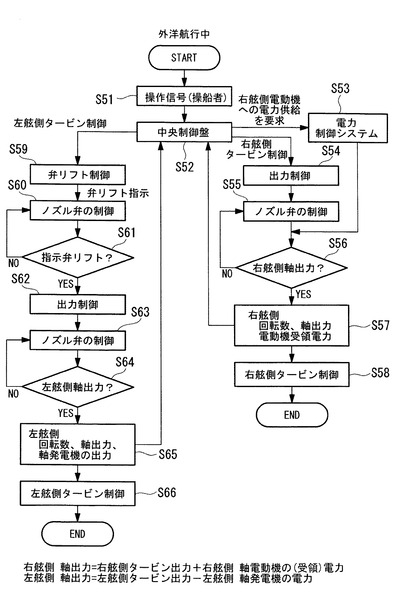
次に、図7に基づいて、船舶が外洋航行中に右舷側の再熱器のバーナが失火した場合における制御について説明する。
操船者は、船橋に設置されている制御盤に設けられているエンジンテレグラフによって船速度指示の操作信号を発信する(S51)。発信された操作信号は、中央制御盤内に設けられている統合制御装置2に送信される。統合制御装置2は、電力制御システム23へ左舷側の軸発電機21Bから得られた電力を右舷側の軸発電機21Aへ供給するように信号を送信する(S52)。この場合、右舷側の軸発電機21Aは、電動機として作動する。電力制御システム23は、左舷側の軸発電機21Bが発生した電力を右舷側の軸発電機21Aを駆動する電力として供給する(S53)。
【0060】
統合制御装置2は、右舷側の主機遠隔制御装置22Aへ右舷側の推進用蒸気タービン3Aを出力制御するように信号を送信する(S52)。右舷側の主機遠隔制御装置22Aは、制御方法として出力制御を行う(S54)。右舷側の主機遠隔制御装置22Aは、操作信号から指示軸出力を算出し、右舷側の推進用蒸気タービン3Aのノズル弁へ出力の指示信号を送信する。右舷側の推進用蒸気タービン3Aのノズル弁は、出力の指示信号に応じて右舷側の推進用蒸気タービン3Aを増減速させるように開度が制御される(S55)。右舷側の推進用蒸気タービン3Aのノズル弁は、右舷側の推進蒸気タービン3Aの出力がステップS53で左舷側の軸発電機21Bから右舷側の軸発電機21Aへと供給された電力との合計である指示軸出力に一致するように右舷側の推進用蒸気タービン3Aを増減速させるようにステップS55が繰り返される(S56)。右舷側の軸発電機21Aに加勢された電力と出力制御されている右舷側の推進用蒸気タービン3Aの出力との合計出力が指示軸出力にまで達した後、右舷側のプロペラ軸17Aの実回転数と実軸出力と右舷側の電動機として作動している軸発電機21Aの受領電力との信号が、中央制御盤(S57)と右舷側の主機遠隔制御装置22Aとに送信される(S58)。
【0061】
統合制御装置2は、左舷側の主機遠隔制御装置22Bへ左舷側の推進用蒸気タービン3Bを弁リフト制御の後、出力制御によって制御するように信号を送信する(S52)。左舷側の主機遠隔制御装置22Bは、制御方法として弁リフト制御を行う(S59)。左舷側の主機遠隔制御装置22Bは、操作信号から指示弁リフトを算出し、左舷側の推進用蒸気タービン3Bのノズル弁へ弁リフトの指示信号を送信する。左舷側の推進用蒸気タービン3Bのノズル弁は、弁リフトの指示信号に応じて左舷側の推進用蒸気タービン3Bを増減速させるように開度が制御される(S60)。左舷側の推進用蒸気タービン3Bのノズル弁の制御は、左舷側の推進用蒸気タービン3Bの弁リフトの指示信号が指示弁リフトに一致するようにステップS60が繰り返される(S61)。左舷側の推進用蒸気タービン3Bのノズル弁の弁リフトが指示弁リフトにまで達した後、左舷側の主機遠隔制御装置22Bは、制御方法として出力制御を行う(S62)。左舷側の主機遠隔制御装置22Bは、操作信号から指示軸出力を算出し、左舷側の推進用蒸気タービン3Bのノズル弁へ出力指示の信号を送信する。左舷側の推進用蒸気タービン3Bのノズル弁は、出力指示の信号に応じて左舷側の推進用蒸気タービン3Bを増減速させるように開度が制御される(S63)。左舷側の推進用蒸気タービン3Bのノズル弁は、左舷側の推進用蒸気タービン3Bの出力が左舷側の軸発電機21Bにより発生される電力と指示軸出力との合計出力となるように、推進用蒸気タービン3Bに供給される蒸気量を制御するように開度が制御される。左舷側の推進用蒸気タービン3Bのノズル弁の制御は、左舷側のプロペラ軸17Bの実軸出力が指示軸出力に一致するようにステップS63が繰り返される(S64)。左舷側の推進用蒸気タービン3Bの出力により、左舷側のプロペラ軸17Bの実軸出力が指示軸出力にまで達した後、左舷側のプロペラ軸17Bの実回転数と実軸出力と左舷側の軸発電機21Bが発生する電力の信号とは、中央制御盤(S65)と左舷側の主機遠隔制御装置22Bとに送信される(S66)。
【0062】
なお、右舷側の軸発電機21Aに加勢された電力と右舷側の推進用蒸気タービン3Aの出力との合計出力が指示軸出力にまで達した後も、右舷側の軸発電機21Aに加勢された電力および右舷側の推進用蒸気タービン3Aの出力の合計出力は逐次監視され、指示軸出力と右舷側の軸発電機21Aに加勢された電力および右舷側の推進用蒸気タービン3Aの出力の合計出力とに偏差が生じた場合には、右舷側の軸発電機21Aに加勢された電力および右舷側の推進用蒸気タービン3Aの出力の合計出力が指示軸出力に一致するように右舷側の推進用蒸気タービン3Aの出力を増加または減少させるように出力制御が行われる。
【0063】
また、左舷側のプロペラ軸17Bの実軸出力が指示軸出力にまで達した後も、左舷側のプロペラ軸17Bの実回転数および実軸出力は逐次監視され、指示軸出力と実軸出力とに偏差が生じた場合には、指示軸出力に一致するように左舷側のプロペラ軸17Bの実軸出力を増加または減少させるように出力制御が行われる。
【0064】
以上の通り、本実施形態に係る統合制御装置2及びこれを備えた船舶によれば、以下の作用効果を奏する。
左舷側の軸発電機21Bで発生した電力の出力先を制御することとしたので、右舷側の軸発電機21A(負荷が不足している推進装置側の軸発電機)に電力を供給することができる。そのため、右舷側の推進装置1A(負荷が不足している推進装置)を加勢することできる。さらに、統合制御装置2は、両主機遠隔制御装置22A,22Bに各推進用蒸気タービン3A,3Bを出力制御するように信号を送信することとした。したがって、最終的に両推進装置1A,1Bの実軸出力が指示軸出力に一致するように調整されるため各推進装置1A,1Bの実軸出力を同期させることができ、推進軸19A,19Bの回転数を同期させることができる。
【0065】
[第4実施形態]
以下、本発明の第4実施形態について説明する。本実施形態の船舶および統合制御装置を備えている推進装置の構成及び運転方法は、両再熱器の運転が停止し両再熱器に供給される過熱蒸気供給ラインがバイパスされている点において第1実施形態と相違し、その他は同様である。したがって、同一の構成については、同一の符号を付してその説明を省略する。
【0066】
図8には、図1に示した推進装置のうち両再熱器および両再熱器へ過熱蒸気を供給する過熱蒸気供給ラインがバイパスされていることが示されている。
船舶が外洋航行中に、再熱器13A,13Bに設けられている蒸気が通過するチューブ(図示せず)等が損傷した場合には、再熱器13A,13Bの運転が停止される。再熱器13A,13Bの運転が停止しているため、前進用中圧タービン7A,7Bには過熱されていない温度の低下した蒸気が前進用高圧タービン6A,6Bから直接導かれることになる。一方、主ボイラ12A,12Bは正常稼働しているため、前進用高圧タービン6A,6Bには主ボイラ12A,12Bから主蒸気が導かれている。前進用中圧タービン7A,7Bと前進用高圧タービン6A,6Bとの間には、導かれている蒸気の温度差によってタービン軸方向に温度分布の偏りが生じる。このタービン軸方向の温度分布の偏りによって、タービン軸方向に不均一な熱膨張が生じる。そのために、前進用中圧タービン7A,7Bと前進用高圧タービン6A,6Bとの車室(図示せず)の水平継手面から蒸気漏れが発生する恐れが生じる。この蒸気漏れを防止して、各推進用蒸気タービン3A,3Bの安全な運用を行うために、両推進用蒸気タービン3A,3Bは規定回転数にまで自動減速される。これにより、船舶は、港湾航行速度を上限とした昇速制限によって運航される。
【0067】
次に、図9に基づいて、船舶が外洋航行中に両再熱器が損傷した場合における制御について説明する。
再熱器13A,13Bが停止した場合には、両推進用蒸気タービン3A,3Bの安全装置(図示せず)である自動減速装置が作動する。これによって、両推進用蒸気タービン3A,3Bの出力が自動的に低下し、両推進装置1A,1Bの速度が減速される(S70)。これにより、船舶は、港湾航行速度に対応した速度にまで船速が減速される。両推進用蒸気タービン3A,3Bの自動減速後、操船者が船橋に設置されている制御盤に設けられているエンジンテレグラフによって船速度指示の操作信号を発信する(S71)。発信された操作信号と、両推進用蒸気タービン3A,3Bの自動減速及び両再熱器13A,13Bの停止の信号とは、中央制御盤内に設けられている統合制御装置2へ送信される。統合制御装置2は、両推進用蒸気タービン3A,3Bの出力を港湾航行速度を上限とした昇速制限までの出力制限とする(S72)。
【0068】
統合制御装置2は、各主機遠隔制御装置22A,22Bへ各推進用蒸気タービン3A,3Bを出力制御によって制御するように信号を送信する(S72)。各主機遠隔制御装置22A,22Bは、推進用蒸気タービン3A,3Bのノズル弁へ回転数の指示信号を送信する(S73,S73’)。各主機遠隔制御装置22A,22Bは、操作信号から指示回転数を算出する。また、各推進用蒸気タービン3A,3Bのノズル弁は、弁リフトの指示信号に応じて各推進用蒸気タービン3A,3Bを増減速させるように開度が制御される(S74,S74’)。各推進用蒸気タービン3A,3Bのノズル弁の制御は、各プロペラ軸17A,17Bの実回転数が指示回転数に一致するようにステップS74,S74’が繰り返される(S75,S75’)。各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後、各プロペラ軸17A,17Bの実回転数と実軸出力との信号が、中央制御盤(S76,S76’)と各主機遠隔制御装置22A,22Bとに送信される(S77,S77’)。
【0069】
なお、各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後も、各プロペラ軸17A,17Bの実回転数および実軸出力は逐次監視され、指示回転数と実回転数とに偏差が生じた場合には、指示回転数に一致するように各プロペラ軸17A,17Bの実回転数を増減速させる回転数制御が行われる。
【0070】
以上の通り、本実施形態に係る統合制御装置2及びこれを備える船舶によれば、以下の作用効果を奏する。
再熱器13A,13Bをバイパスしなければならい程度の重篤に不具合が生じた場合には、前進用高圧タービン6A,6Bと前進用中圧タービン7A,7B(再熱タービン内)へと供給される主蒸気と再熱器13A,13Bから供給される過熱蒸気との熱量に差を生じ、推進用蒸気タービン3A,3Bの温度分布に偏りが生じる。そのため、推進用蒸気タービン3A,3Bの車室の水平継手面内から蒸気漏れが発生する恐れがある。しかし、統合制御装置2は、推進用蒸気タービン3A,3Bを船舶の港湾航行速度に応じた回転数(規定回転数)にまで減速させ、回転数制御することとした。そのため、前進用高圧タービン6A,6Bと前進用中圧タービン7A,7Bとに供給される蒸気量が絞られて主蒸気と再熱器13A,13Bから供給される過熱蒸気との熱量の差が小さくなり、前進用高圧タービン6A,6Bと前進用中圧タービン7A,7Bの温度分布の偏りが小さくなる。従って、推進用蒸気タービン3A,3Bの安全な運転が可能となる。
【符号の説明】
【0071】
1A,1B 推進装置
2 統合制御装置
3A,3B 蒸気タービン(推進用蒸気タービン)
14A,14B 蒸気発生装置
19A,19B 推進軸
22A,22B 主機制御装置(主機遠隔制御装置)
【技術分野】
【0001】
本発明は、統合制御装置及びこれを備えた船舶について、特に、2機2軸の蒸気タービン船の回転数同期制御に関するものである。
【背景技術】
【0002】
一般に、プロペラを回転させる推進軸と、推進軸を駆動する推進用蒸気タービンとを各々2つ有する2機2軸の蒸気タービン船において、推進用蒸気タービンに蒸気を供給する蒸気発生装置と、推進用蒸気タービンを制御する主機遠隔制御装置とは、各々2つ備えられている。これら推進用蒸気タービン、蒸気発生装置、推進軸、主機遠隔制御装置等を含めた推進装置は、各軸で互いに独立している。2機2軸の蒸気タービンの制御については、特許文献1にターニング時における回転数同期操作を自動で行う発明が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−108803号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、蒸気タービンの通常運転時においては、各蒸気タービンに蒸気を供給するボイラ等の蒸気発生装置の特性の差異や不具合により一方の蒸気タービンの出力が低下し両推進軸の回転数を同期させることができないという問題があった。
特許文献1に開示されている発明は、ターニング時の同期装置についてであり、通常運転時における回転数の自動同期については開示されていない。
【0005】
本発明は、このような事情に鑑みてなされたものであって、2機の蒸気タービンを有し各蒸気タービンによって駆動される2本の推進軸の回転数を同期させることができる統合制御装置とこれを備えた船舶を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の統合制御装置及びこれを備えた船舶は以下の手段を採用する。
すなわち、本発明に係る統合制御装置は、蒸気タービンと、該蒸気タービンに接続された推進軸と、前記蒸気タービンに蒸気を供給する蒸気発生装置と、前記蒸気タービンを制御する主機制御装置と、を各々有した2つの推進装置を統合制御する統合制御装置であって、各前記推進装置の運転状況と、各前記推進装置の出力と、各前記推進軸の回転数と、のいずれかに応じて、各前記蒸気タービンの制御を行うように各前記主機制御装置を制御することを特徴とする。
【0007】
推進装置の運転状況と、推進装置の出力と、推進軸の回転数とのいずれかに応じて、統合制御装置から各主機制御装置へと各蒸気タービンの運転を制御する信号が送信されるので、蒸気タービン毎に運転を制御することができる。従って、両推進軸の回転数を同期させることが可能となる。
【0008】
さらに、本発明に係る統合制御装置は、各前記推進軸の回転数を指示回転数に一致するように増減速させる回転数制御とするように各前記主機制御装置を制御することを特徴とする。
【0009】
各蒸気タービンを回転数制御することとした。そのため、指示回転数に対応した蒸気量を供給した際に各推進軸の回転数が指示回転数以下になった場合でも、さらに蒸気量を供給することによって各推進軸の回転数を指示回転数に一致させるように増速させることができる。また、指示回転数に対応した蒸気量を供給した際に各推進軸の回転数が指示回転数以上になった場合には、蒸気量の供給を減少させることによって各推進軸の回転数を指示回転数に一致させるように減速させることができる。従って、指示回転数が両推進軸で同じ場合には、両推進軸の回転数を同期させることができる。
【0010】
さらに、本発明に係る統合制御装置は、前記推進装置の一方が停止し指示出力が低下した場合には、一方の前記主機制御装置によって停止した一方の前記蒸気タービンの運転を停止させ、他方の前記主機制御装置によって指示出力に一致するように他方の前記蒸気タービンの出力を増加または減少させる出力制御とすることを特徴とする。
【0011】
一方の蒸気タービンの損傷や推進装置等に不具合が発生し一方の推進装置を停止させなければならない場合には、一方の主機制御装置によって一方の蒸気タービンを停止させ、他方の主機制御装置に他方の蒸気タービンを両推進装置運転時の指示回転数相当の指示出力に一致するように出力を増加または減少させる出力制御とする信号を送信することとした。そのため、他方の蒸気タービンを有する他方の推進装置によって両推進装置運転時の指示回転数相当の指示出力を発生させることが可能となる。
【0012】
また、両推進装置に不具合が生じていない場合であっても、一方の蒸気タービンを停止させて他方の推進装置によって両推進装置運転時の指示回転数相当の指示出力を発生させることが可能となる。両蒸気タービンを部分負荷運転する場合と比べて、一方の蒸気タービンを高負荷で運転する場合には、運転している蒸気タービンのタービン性能が良くなる。そのため、蒸気タービンの燃料消費を低減することができる。従って燃料コストの削減を図ることができる。
【0013】
さらに、本発明に係る統合制御装置によれば、各前記推進装置は、各前記蒸気タービンの他端に軸発電機を有し、各前記推進装置の出力に応じて、各前記軸発電機の電力の出力先の制御と、各前記主機制御装置によって各前記蒸気タービンの出力を増加または減少させる出力制御とすることを特徴とする。
【0014】
軸発電機により発生された電力の出力先を制御する(例えば、出力先として他方の推進装置側の軸発電機)こととしたので、負荷が不足している推進装置側の軸発電機に電力を供給することができる(この場合、電力を供給された側の軸発電機は電動機として作動する)。そのため、負荷が不足している推進装置を加勢することができる。さらに、統合制御装置は、両主機制御装置に各推進用蒸気タービンを出力制御するように信号を送信することとした。従って、各推進装置の出力を同期させることができ、両推進軸の回転数を同期させることができる。
なお、軸発電機は、電力を供給する場合には発電機として作動し、電力を供給された場合には電動機(モータ)として作動する。
【0015】
さらに、本発明に係る統合制御装置によれば、各前記蒸気発生装置は、再熱器を有し、各前記蒸気タービンは、再熱タービンとされ、前記再熱器が停止した場合には、各前記主機制御装置が各前記蒸気タービンを規定回転数に一致するように回転数を減速させ、回転数制御を行うことを特徴とする。
【0016】
再熱器をバイパスしなければならい程度の重篤な不具合が生じた場合には、再熱タービン内に供給される主蒸気と再熱器から供給される過熱蒸気との熱量に差が生じ、再熱タービン内の温度分布に偏りが生じる。そのため、再熱タービンから蒸気漏れが発生する恐れがある。しかし、統合制御装置は、再熱タービンを規定回転数に一致するように減速させ、回転数制御するように主機制御装置を制御することとした。そのため、再熱タービン内に供給される蒸気量が絞られて主蒸気と再熱器から供給される過熱蒸気との熱量の差が小さくなり、再熱タービン内の温度分布の偏りが小さくなる。従って、再熱タービンの安全な運転が可能となる。
なお、規定回転数とは、船舶の港湾航行速度に応じた回転数をいう。
【0017】
また、本発明に係る船舶は、上記のいずれかに記載の前記統合制御装置を備えたことを特徴とする。
【0018】
両推進軸の回転数を同期させることができるので、操船者の負担の軽減を図ることができ、船舶の推進効率を向上することが可能となる。また、一方の推進装置の損傷時には、他方の推進装置によって運航が可能であるため運航に対する信頼性を維持することが可能となる。
【発明の効果】
【0019】
推進装置の運転状況と、推進装置の出力と、推進軸の回転数とのいずれかに応じて、統合制御装置から各主機制御装置へと各蒸気タービンの運転を制御する信号が送信されるので、蒸気タービン毎に運転を制御することができる。従って、両推進軸の回転数を同期させることが可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態に係る統合制御装置を備えた推進装置の概略構成図である。
【図2】船舶の港湾航行中における図1に示した統合制御装置の制御を示すフローチャートである。
【図3】船舶の外洋航行中における図1に示した統合制御装置の制御を示すフローチャートである。
【図4】第2実施形態に係る図1に示した右舷側の推進装置が停止した場合の推進装置の概略構成図である。
【図5】図4に示した統合制御装置の制御を示すフローチャートである。
【図6】第3実施形態に係る図1に示した右舷側の再熱器が停止した場合の推進装置の概略構成図である。
【図7】図6に示した統合制御装置の制御を示すフローチャートである。
【図8】第4実施形態に係る図1に示した両再熱器が停止した場合の推進装置の概略構成図である。
【図9】船舶の外洋航行中における図8に示した統合制御装置の制御を示すフローチャートである。
【発明を実施するための形態】
【0021】
[第1実施形態]
図1には、本発明の第1実施形態に係る統合制御装置を備えた推進装置の概略構成図が示されている。
本実施形態に係る蒸気タービン船は、2つ(右舷用、左舷用)の推進装置1A,1Bと、1つの統合制御装置2とを備えている。
推進装置1A,1Bは、甲板下の機関室(図示せず)内に設置されている。各推進装置1A,1Bは、それぞれ推進用蒸気タービン(蒸気タービン)3A,3Bと、減速機11A,11Bと、蒸気発生装置14A,14Bと、推進軸19A,19Bと、軸発電機(軸発電機)21A,21Bと、主機遠隔制御装置(主機制御装置)22A,22Bとを備えている。両推進装置1A,1B間には、1つの電力制御システム23が電気的に接続されている。
【0022】
推進用蒸気タービン3A,3Bは、再熱タービンであり、前進用低圧タービン4A,4Bと、前進用高圧タービン6A,6Bと、前進用中圧タービン7A,7Bと、後進用タービン5A,5Bとを備えている。前進用低圧タービン4Aと、前進用高圧タービン6Aと、前進用中圧タービン7Aとは、1機の主機を構成している。同様に、前進用低圧タービン4Bと、前進用高圧タービン6Bと、前進用中圧タービン7Bとは、1機の主機を構成している。主機は、前進用低圧タービン4A,4Bと後進用タービン5A,5Bとが一本のタービン軸(図示せず)を介して連結されている。前進用高圧タービン6A,6Bと前進用中圧タービン7A,7Bとは、一本のタービン軸(図示せず)を介して連結されている。また、前進用高圧タービン6A,6Bの船首側には、軸発電機21A,21Bが接続されている。
推進用蒸気タービン3A,3Bには、供給される蒸気量を調整するノズル弁(図示せず)が設けられ、ノズル弁には昇速・減速を検知するリフトセンサ(図示せず)が備えられている。
【0023】
減速機11A,11Bは、高圧タービン側第1減速機9A,9Bと、低圧タービン側第1減速機10A,10Bと、第2減速機8A,8Bとを備えている。高圧タービン側第1減速機9A,9Bと、低圧タービン側第1減速機10A,10Bと、第2減速機8A,8Bとは推進用蒸気タービン3A,3Bの船尾側に備えられている。高圧タービン側第1減速機9A,9Bには、前進用中圧タービン7A,7Bのタービン軸が接続されている。低圧タービン側第1減速機10A,10Bには、前進用低圧タービン4A,4Bのタービン軸が接続されている。高圧タービン側第1減速機9A,9B及び低圧タービン側第1減速機10A,10Bの他端には、第2減速機8A,8Bが接続されている。
【0024】
蒸気発生装置14A,14Bは、主ボイラ12A,12Bと、再熱器13A,13Bとを備えている。
推進軸19A,19Bは、中間軸16A,16Bと、プロペラ軸17A,17Bと、クラッチ18A,18Bとを有している。中間軸16A,16Bは、第2減速機8A,8Bに接続されている。さらに、中間軸16A,16Bの他端には、クラッチ18A,18Bを介してプロペラ軸17A,17Bが接続されている。クラッチ18A,18Bは、嵌脱することによってプロペラ軸17A,17Bと中間軸16A,16Bとの間を切り離し又は嵌合する。プロペラ軸17A,17Bの他端には、固定ピッチプロペラであるプロペラ15A,15Bが設けられている。
プロペラ軸17A,17Bには、回転数発信器(図示せず)及び出力検出器(図示せず)が備えられている。
軸発電機21A,21Bは、推進用蒸気タービン3A,3Bの船首側に減速機20A,20Bを介して接続されている。
【0025】
主機遠隔制御装置22A,22Bは、機関室内に設けられた機関制御室(図示せず)に備えられている。主機遠隔制御装置22A,22Bには、プロペラ軸17A,17Bに設けられている回転数発信器及び出力検出器よりプロペラ軸17A,17Bの回転数(以下「実回転数」という)及び軸出力(以下「実軸出力」という)の信号と、軸発電機21A,21Bが発生あるいは消費する電力の信号と、統合制御装置2からの操作信号(運転情報)とが入力される。
主機遠隔制御装置22A,22Bは、推進用蒸気タービン3A,3Bに設けられているノズル弁の弁リフトを制御することによって推進用蒸気タービン3A,3Bの始動、停止、前後進、増減速の制御を行う。また、主機遠隔制御装置22A,22Bは、指示回転数または指示出力に応じた推進用蒸気タービン3A,3Bのノズル弁の指示弁リフトを算出する中央演算処理装置(図示せず)を有している。
主機遠隔制御装置22A,22Bは、中央演算処理装置によって、操船者が発信する操作信号に対応する各プロペラ軸17A,17Bの指示回転数を算出する。さらに、中央演算処理装置は、指示回転数および指示出力に対応した推進用蒸気タービン3A,3Bのノズル弁の指示弁リフトを算出する。また、中央演算処理装置は、操船者が発信する操作信号に応じた各推進用蒸気タービン3A,3Bの指示出力を算出する。
主機遠隔制御装置22A,22Bは、船舶が港湾航行中は、操船者が発信する操作信号より算出される指示回転数に一致するように推進用蒸気タービン3A,3Bに供給される蒸気量を制御して各推進用蒸気タービン3A,3Bの回転数を増減速させる回転数制御を行う。また、主機遠隔制御装置22A,22Bは、船舶が外洋航行中は、操船者が発信する操作信号より算出される推進用蒸気タービン3A,3Bのノズル弁の指示弁リフトに一致するように各推進用蒸気タービン3A,3Bのノズル弁が制御される弁リフト制御を行う。しかし、選択される制御方法によって、主機遠隔制御装置22A,22Bは、弁リフト制御、回転数制御、推進装置1A,1Bの合計出力や軸発電機21A,21Bにより発生あるいは消費される電力やプロペラ軸17A,17Bの軸出力から算出される指示出力に一致するように推進用蒸気タービン3A,3Bに蒸気量を供給する出力制御を行う。
【0026】
電力制御システム(PMS:Power Management System)23は、機関制御室内に設けられている。電力制御システム23は、軸発電機21A,21B及び機関室内に設けられている発電機(図示せず)によって発生された電力の監視、制御、保護を行っている。電力制御システム23は、機関室内に設置されている補機類(図示せず)の駆動電源や船内照明等の船内電力へと電力を振り分けている。
【0027】
統合制御装置2は、機関制御室に設置されている中央制御盤(図示せず)内に設けられている。統合制御装置2には、プロペラ軸17A,17Bに設けられている回転数発信器及び出力検出器から得られる実回転数及び実軸出力の信号と、軸発電機21A,21Bが発生あるいは消費する電力の信号と、推進装置1A,1Bの運転情報とが入力される。
【0028】
次に、船舶の前進時における推進装置1A,1Bの運転方法について説明する。
主ボイラ12A,12Bで発生した主蒸気は、ノズル弁を介して前進用高圧タービン6A,6Bに供給される。前進用高圧タービン6A,6Bに流入した主蒸気は、ノズル(図示せず)内を流動中に、その保有する熱エネルギが運動エネルギに変換され、高速流動の蒸気となる。この高速流動の蒸気は、タービン翼(図示せず)に作用して前進用高圧タービン6A,6Bのタービン軸を回転駆動させる。
【0029】
前進用高圧タービン6A,6Bを通過した蒸気は、再熱器13A,13Bに導かれる。再熱器13A,13Bに導かれた蒸気は、再過熱され飽和温度以上に熱せられて過熱蒸気にされる。過熱蒸気は、前進用中圧タービン7A,7Bに供給される。
【0030】
前進用中圧タービン7A,7Bには、再熱器13A,13Bから過熱蒸気が導かれる。前進用中圧タービン7A,7Bに供給された過熱蒸気は、前進用高圧タービン6A,6Bと同様に、ノズル(図示せず)内を流動中に、その保有する熱エネルギが運動エネルギに変換され、高速流動の蒸気となる。この高速流動の蒸気は、タービン翼(図示せず)に作用して前進用高圧タービン6A,6Bのタービン軸をさらに回転駆動させる。前進用中圧タービン7A,7Bを通過した蒸気は、前進用低圧タービン4A,4Bに導かれる。
【0031】
前進用低圧タービン4A,4Bに導かれた蒸気は、前進用高圧タービン6A,6B及び前進用中圧タービン7A,7Bと同様に、ノズル(図示せず)内を流動中にその保有する熱エネルギが運動エネルギに変換され、高速流動の蒸気となる。この高速流動の蒸気は、タービン翼(図示せず)に作用して前進用低圧タービン4A,4Bのタービン軸を回転駆動させる。
【0032】
前進用高圧タービン6A,6B及び前進用中圧タービン7A,7Bによって駆動されたタービン軸の出力は、高圧タービン側第1減速機9A,9Bによって低下される。前進用低圧タービン4A,4Bのタービン軸の出力は、低圧タービン側第1減速機10A,10Bによって低下される。高圧タービン側第1減速機9A,9B及び低圧タービン側第1減速機10A,10Bの出力は、第2減速機8A,8Bに伝達される。第2減速機8A,8Bにより、高圧タービン側第1減速機9A,9B及び低圧タービン側第1減速機10A,10Bの出力は、合成されて1つの出力となる。1つになった出力は、第2減速機8A,8Bにおいてさらに低下される。
低下された出力は、中間軸16A,16Bに伝達される。中間軸16A,16Bに伝達された出力は、クラッチ18A,18Bが嵌合状態の場合にはプロペラ軸17A,17Bに伝達される。中間軸16A,16Bからプロペラ軸17A,17Bへと出力が伝達されることによりプロペラ15A,15Bが回転駆動され推力が発生する。一方、クラッチ18A,18Bが脱状態の場合には、中間軸16A,16Bの出力はプロペラ軸17A,17Bへと伝達されない。プロペラ軸17A,17Bに出力が伝達されないためプロペラ15A,15Bが回転駆動されず推力が発生しない。また、クラッチ18A,18Bが脱状態の場合には、プロペラ15A,15Bが空転しても空転の影響が推進用蒸気タービン3A,3Bには伝達されない。
【0033】
船首側の減速機20A,20Bは、前進用高圧タービン6A,6B及び前進用中圧タービン7A,7Bのタービン軸が回転駆動されることによって駆動される。船首側の減速機20A,20Bが駆動されることにより軸発電機21A,21Bが駆動される。これによって、軸発電機21A,21Bは電力を発生する発電機として作動する。また、軸発電機21A,21Bは、電力を供給されることによって出力加勢のための電動機(モータ)として作動することもできる。
【0034】
次に、図2に基づいて、船舶が港湾航行中に操船者が発する船速度指示に応じたプロペラ軸の実回転数が得られない場合における制御について説明する。
操船者は、船橋(図示せず)に設置されている制御盤(図示せず)に設けられているエンジンテレグラフ(図示せず)によって船速度指示の操作信号を発信する(S1)。発信された操作信号は、中央制御盤内に設けられている統合制御装置2(図1参照)に送信される。各推進装置1A,1Bは、船舶の長期間の航行によりプロペラ15A,15Bへの汚れの付着や、各蒸気発生装置14A,14Bの蒸気発生状況等の差異により、操船者の発する船速度指示の操作信号に応じた指示回転数にまでプロペラ軸17A,17Bの実回転数が達しないことがある。統合制御装置2は、両主機遠隔制御装置22A,22Bへ各推進用蒸気タービン3A,3Bを回転数制御によって制御するように信号を送信する(S2)。主機遠隔制御装置22A,22Bは、操船者が発信する操作信号から算出される指示回転数に一致するように推進用蒸気タービン3A,3Bに供給される蒸気量を制御して推進用蒸気タービン3A,3Bを増減速させる回転数制御を行う。各主機遠隔制御装置22A,22Bは、操作信号に応じた指示回転数を算出し、各推進用蒸気タービン3A,3Bのノズル弁へ回転数の指示信号を送信する(S3,S3’)。各推進用蒸気タービン3A,3Bのノズル弁は、回転数の指示信号に応じて各推進用蒸気タービン3A,3Bを増減速させるように開度が制御される。また、各プロペラ軸17A,17Bの実回転数と実軸出力との信号は、中央制御盤に設けられている統合制御装置2に送信される(S4,S4’)。各推進用蒸気タービン3A,3Bのノズル弁の制御は、各プロペラ軸17A,17Bの実回転数が指示回転数に一致するようにステップS4,S4’が繰り返される(S5,S5’)。各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後、各プロペラ軸17A,17Bの実回転数と実軸出力との信号は、中央制御盤(S6,S6’)と各主機遠隔制御装置22B,22Aとに送信される(S7,S7’)。
【0035】
なお、各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後も、各プロペラ軸17A,17Bの実回転数および実軸出力は逐次監視され、指示回転数と実回転数とに偏差が生じた場合には、指示回転数に一致するように各プロペラ軸17A,17Bの実回転数を増減速させるように回転数制御が行われる。
【0036】
次に、図3に基づいて、船舶が外洋航行中に操船者が発する船速度指示の操作信号に応じたプロペラ軸の実回転数が得られない場合における制御について説明する。
操船者は、船橋に設置されている制御盤に設けられているエンジンテレグラフによって船速度指示の操作信号を発信する(S11)。発信された操作信号は中央制御盤内に設けられている統合制御装置2へ送信される。各推進装置1A,1Bは、船舶の長期間の航行によりプロペラ15A,15Bへの汚れの付着や、各蒸気発生装置14A,14Bの蒸気発生状況等の差異により操船者の発する船速度指示に応じた指示回転数にプロペラ軸17A,17Bの実回転数まで達さないことがある。統合制御装置2は、両主機遠隔制御装置22A,22Bへ操船者が発信する操作信号から算出される推進用蒸気タービン3A,3Bのノズル弁の指示弁リフトによって各推進用蒸気タービン3A,3Bの増減速を制御する弁リフト制御を行った後、各推進用蒸気タービン3A,3Bを回転数制御によって制御するように信号を送信する(S12)。
【0037】
各主機遠隔制御装置22A,22Bは、制御方法としてまず弁リフト制御を行う。各主機遠隔制御装置22A,22Bは、操作信号に応じた指示弁リフトを算出し、各推進用蒸気タービン3A,3Bのノズル弁へ弁リフトの指示信号を送信する(S13,S13’)。各推進用蒸気タービン3A,3Bのノズル弁は、弁リフトの指示信号に応じて各推進用蒸気タービン3A,3Bを増減速させるように開度が制御される(S14,S14’)。各推進用蒸気タービン3A,3Bのノズル弁の制御は、弁リフトが指示弁リフトに一致するようにステップS14,S14’が繰り返される(S15,S15’)。各推進用蒸気タービン3A,3Bのノズル弁の弁リフトが指示弁リフトに達した後、各主機遠隔制御装置22A,22Bは、各推進用蒸気タービン3A,3Bの制御方法として回転数制御を行う(S16,S16’)。各主機遠隔制御装置22A,22Bは、操作信号に応じた指示回転数を算出する。各推進用蒸気タービン3A,3Bのノズル弁は、回転数の指示信号に応じて各推進用蒸気タービン3A,3Bを増減速させるように制御される(S17,S17’)。各推進用蒸気タービン3A,3Bのノズル弁の制御は、各プロペラ軸17A,17Bの実回転数が指示回転数に一致するようにステップS17,S17’が繰り返される(S18,S18’)。各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後、各プロペラ軸17A,17Bの実回転数と実軸出力と各軸発電機21A,21Bが発生する電力の信号とが中央制御盤(S19,19’)と各主機遠隔制御装置22A,22Bとに送信される(S20,S20’)。
【0038】
なお、各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後も、各プロペラ軸17A,17Bの実回転数および実軸出力は逐次監視され、指示回転数と実回転数とに偏差が生じた場合には、指示回転数に一致するように各プロペラ軸17A,17Bの実回転数を増減速させる回転数制御が行われる。
【0039】
以上の通り、本実施形態に係る統合制御装置2及びこれを備えた船舶によれば、以下の作用効果を奏する。
プロペラ15A,15Bへの汚れの付着や、各蒸気発生装置14A,14Bの蒸気発生状況等の差異(推進装置の運転状況)に応じて、統合制御装置2から各主機遠隔制御装置22A,22Bへと各推進用蒸気タービン3A,3Bの運転を制御する信号が送信されるので、推進用蒸気タービン3A,3B毎に運転を制御することができる。従って、両プロペラ軸17A,17Bの実回転数を同期させることが可能となる。
【0040】
外洋航行中に各プロペラ軸17A,17Bの実回転数が指示回転数にまで達さない場合には、各推進用蒸気タービン3A,3Bを弁リフト制御した後に回転数制御することとした。そのため、指示回転数に対応した蒸気量を供給しても各プロペラ軸17A,17Bの実回転数が指示回転数以下になった場合であっても、さらに各推進用蒸気タービン3A,3Bのノズル弁の制御を行う(蒸気量を供給する)ことによって各プロペラ軸17A,17Bの実回転数を指示回転数に一致させるように増速させることができる。また、指示回転数に対応した蒸気量を供給した際に各プロペラ軸17A,17Bの実回転数が指示回転数以上になった場合には、各推進用蒸気タービン3A,3Bのノズル弁の制御をする(蒸気量の供給を減少させる)ことによって各プロペラ軸17A,17Bの実回転数を指示回転数に一致させるように減速させることができる。従って、指示回転数が両プロペラ軸17A,17Bで同じ場合には、両プロペラ軸17A,17Bの実回転数を同期させることができる。
【0041】
また、各プロペラ軸17A,17Bの実回転数が規定回転数(港湾航行モード上限船速相当の回転数)以下で運転される港湾航行では、各推進用蒸気タービン3A,3Bは回転数制御によって継続制御される。そのため、指示回転数に対応した蒸気量を供給しても各プロペラ軸17A,17Bの実回転数が指示回転数以下になった場合であっても、さらに各推進用蒸気タービン3A,3Bのノズル弁の制御を行うことによって各プロペラ軸17A,17Bの実回転数を指示回転数に一致させるように増速させることができる。また、指示回転数に対応した蒸気量を供給した際に各プロペラ軸17A,17Bの実回転数が指示回転数以上になった場合には、各推進用蒸気タービン3A,3Bのノズル弁の制御をすることによって各プロペラ軸17A,17Bの実回転数を指示回転数に一致させるように減速させることができる。従って、指示回転数が両プロペラ軸17A,17Bで同じ場合には、両プロペラ軸17A,17Bの実回転数を同期させることができる。
【0042】
また、潮流や波風などの影響により、各プロペラ軸17A,17Bの実回転数が上昇しすぎる(追い回し)の場合でも、各推進用蒸気タービン3A,3Bのノズル弁を制御して蒸気量を減少させることによって各プロペラ軸17A,17Bの実回転数を指示回転数に向けて減速させることができる。したがって、両プロペラ軸17A,17Bの実回転数を同期させることができる。
【0043】
両プロペラ軸17A,17Bの実回転数を同期させることができるので、操船者の負担の軽減を図ることができ、船舶の推進効率を向上することが可能となる。
【0044】
なお、本実施形態では、クラッチ18A,18Bを用いて説明したが、本発明はこれに限定されるものではなく、クラッチ18A,18Bを設けずプロペラ15A,15Bを可変ピッチプロペラとしても良い。
また、蒸気発生装置14A,14Bとして主ボイラ12A,12Bと再熱器13A,13Bとして説明したが、主ボイラ12A,12Bのみとし推進用蒸気タービン3A,3Bを非再熱タービンとしても良い。
【0045】
[第2実施形態]
以下、本発明の第2実施形態について説明する。本実施形態の船舶および統合制御装置を備えている推進装置の構成と運転方法は、右舷側の推進装置が停止している点において第1実施形態と相違し、その他は同様である。したがって、同一の構成および運転方法については、同一の符号を付してその説明を省略する。
【0046】
図4には、図1に示した推進装置1A,1Bのうち右舷側の推進装置1Aが停止していることが示されている。
右舷側の推進用蒸気タービン3Aの損傷や推進軸19Aの損傷等の場合には、右舷側の推進装置1Aの運転が停止される。また、右舷側の推進装置1Aが停止した場合には、右舷側のプロペラ15Aがつれ廻りによって空転することがある。プロペラ15Aが空転すると、右舷側の推進用蒸気タービン3Aに影響を及ぼす恐れが生じる。そのため、プロペラ15Aの空転による推進用蒸気タービン3Aへの影響を防止するため、中間軸16Aに設けられているクラッチ18Aは脱状態にされる。
【0047】
次に、図5に基づいて、船舶が航行中に右舷側の推進装置が停止した場合における制御について説明する。
操船者は、船橋に設置されている制御盤に設けられているエンジンテレグラフによって船速度指示の操作信号を発信する(S31)。発信された操作信号は、中央制御盤内に設けられている統合制御装置2に送信される。統合制御装置2は、右舷側の主機遠隔制御装置22Aへ右舷側の推進用蒸気タービン3Aを停止する信号を送信する(S32)。右舷側の主機遠隔制御装置22Aは、右舷側の推進用蒸気タービン3Aの制御を停止する(S33)。操船者は、制御盤から右舷側のクラッチ18Aを脱状態にする(S34)。右舷側のクラッチ18Aが脱状態になった後、右舷側の推進用蒸気タービン3Aに備えられているターニングギア(図示せず)が嵌合される(S35)。
【0048】
この後、船舶は、左舷側の推進装置1Bのみによって運転される。そのため、左舷側の推進用蒸気タービン3Bを弁リフト制御又は回転数制御のまま制御したのでは、両推進装置1A,1Bが運転した場合における指示回転数相当のタービン総出力の半分の出力での運転となる。そのため、船舶は、操作信号による指示弁リフトあるいは指示回転数相当の船速を得ることができない。そこで統合制御装置2は、操作信号を両推進装置1A,1B運転時の指示回転数相当のタービン総出力(指示出力)信号に変換する。変換されたタービン総出力の信号は、左舷側の主機遠隔制御装置22Bに送信される。左舷側の主機遠隔制御装置22Bには、統合制御装置2から出力制御によって制御するように信号が送信される(S32)。左舷側の主機遠隔制御装置22Bは、左舷側の推進用蒸気タービン3Bの制御方法として出力制御を行う(S36)。左舷側の主機遠隔制御装置22Bは、左舷側の推進用蒸気タービン3Bのノズル弁へ出力の指示信号を送信する。推進用蒸気タービン3Bのノズル弁は、出力の指示信号に応じて左舷側の推進用蒸気タービン3Bを増減速させるように開度が制御される(S37)。左舷側の推進用蒸気タービン3Bのノズル弁の制御は、左舷側の推進蒸気タービン3Bの出力が指示出力であるタービン総出力に一致するようにステップS37が繰り返される(S38)。左舷側の推進用蒸気タービン3Bの出力が指示出力にまで達した後、左舷側のプロペラ軸17Bの実回転数と実軸出力との信号が、中央制御盤(S39)と左舷側の主機遠隔制御装置22Bとに送信される(S40)。
【0049】
なお、左舷側のプロペラ軸17Bの実回転数が指示回転数にまで達した後も、左舷側のプロペラ軸17Bの実回転数および実軸出力は逐次監視され、指示回転数と実回転数とに偏差が生じた場合には、指示回転数に一致するように左舷側のプロペラ軸17Bの実回転数を増減速させる出力制御が行われる。
【0050】
以上の通り、本実施形態に係る統合制御装置2及びこれを備えた船舶によれば、以下の作用効果を奏する。
右舷側(一方)の推進用蒸気タービン3Aの損傷や推進装置1A等に不具合が発生し右舷側の推進装置1Aを停止させなければならない場合には、右舷側の主機遠隔制御装置22Aによって右舷側の推進用蒸気タービン3Aを停止し、左舷側(他方)の主機遠隔制御装置22Bに左舷側の推進用蒸気タービン3Bを両推進装置1A,1B運転時の指示回転数相当のタービン総出力(指示出力)に一致するように出力を増加または減少させる出力制御とする信号を送信することとした。そのため、左舷側の推進用蒸気タービン3Bを有する左舷側の推進装置1Bによって両推進装置1A,1B運転時の指示回転数相当のタービン総出力を発生させることが可能となる。
【0051】
但し、左舷側の推進用蒸気タービン3Bにて発生し得る出力は、両推進装置1A,1B運転時の合計出力の約50%となるため、左舷側の主機遠隔制御装置22Bへの指示回転数またはタービン総出力には上限を設ける必要がある。
【0052】
また、両推進装置1A,1Bに不具合が生じていない場合であっても、一方の推進用蒸気タービン3A又は3Bを停止させて他方の推進装置1A又は1Bによって両推進装置1A,1B運転時の指示回転数相当のタービン総出力を発生させることが可能となる。両推進用蒸気タービン3A,3Bを部分負荷で運転する場合と比べて、右舷側の推進装置1A又は左舷側の推進装置1Bのどちらか一方を高負荷で運転する場合には、運転している蒸気タービン3A又は3Bのタービン性能が良くなる。そのため、蒸気タービン3A,3Bの燃料消費を低減することができる。従って燃料コストの削減を図ることができる。
【0053】
また、船舶は、右舷側の推進装置1Aの損傷時には、左舷側の推進装置1Bによって運航が可能であるため運航に対する信頼性を維持することが可能となる。
【0054】
[第3実施形態]
以下、本発明の第3実施形態について説明する。本実施形態の船舶および統合制御装置を備えている推進装置の構成及び運転方法は、右舷側の再熱器が停止し右舷側の軸発電機が電動機として作動している点において第1実施形態と相違し、その他は同様である。したがって、同一の構成については、同一の符号を付してその説明を省略する。
【0055】
図6には、図1に示した推進装置1A,1Bのうち右舷側の再熱器13Aが停止し再熱器13Aに接続されている過熱蒸気供給ラインがバイパスされていることが示されている。
右舷側の再熱器13Aに設けられているバーナ(図示せず)が失火等した場合には、右舷側の再熱器13Aの運転は停止される。右舷側の再熱器13Aが停止しているため、右舷側の推進用蒸気タービン3Aの前進用中圧タービン7Aには、再熱器13Aから過熱蒸気が供給されない。そのため、右舷側の前進用中圧タービン7Aに供給される熱量が減少し、右舷側の高圧タービン側第1減速機9Aに伝達される出力が低下する。右舷側の高圧タービン側第1減速機9Aに伝達される出力が低下するので、右舷側の高圧タービン側第1減速機9Aに接続されている右舷側の第2減速機8Aに伝達される出力が低下する。低下した出力は、第2減速機8Aを介して右舷側の推進軸19Aに伝達される。従って、右舷側のクラッチ18Aが嵌合している場合には、右舷側のプロペラ軸17Aの実回転数と実軸出力とが低下する。
【0056】
また、右舷側の前進用低圧タービン4Aに供給される熱量も減少するため、右舷側の低圧タービン側第1減速機10Aに伝達される出力が低下する。右舷側の低圧タービン側第1減速機10Aに伝達される出力が低下するので、右舷側の低圧タービン側第1減速機10Aに接続されている右舷側の第2減速機8Aに伝達される出力が低下する。低下した出力は、第2減速機8Aを介して右舷側の推進軸19Aに伝達される。従って、右舷側のクラッチ18Aが嵌合している場合には、右舷側のプロペラ軸17Aの実回転数と実軸出力とが低下する。
【0057】
また、右舷側の前進用中圧タービン7Aに供給される熱量が減少するので、右舷側の前進用中圧タービン7A及び前進用高圧タービン6Aに接続されているタービン軸の出力が低下する。タービン軸の出力が低下するので、タービン軸の船首側に接続されている減速機20Aの出力が低下する。減速機20Aの出力が低下するので、減速機20Aに接続されている軸発電機21Aが発生する電力も低下する。
【0058】
なお、左舷側の推進装置1Bは、供給される蒸気の熱量に変化がないため左舷側のプロペラ軸17Bの実回転数、実軸出力、軸発電機21Bが発生する電力に変化は生じない。
【0059】
次に、図7に基づいて、船舶が外洋航行中に右舷側の再熱器のバーナが失火した場合における制御について説明する。
操船者は、船橋に設置されている制御盤に設けられているエンジンテレグラフによって船速度指示の操作信号を発信する(S51)。発信された操作信号は、中央制御盤内に設けられている統合制御装置2に送信される。統合制御装置2は、電力制御システム23へ左舷側の軸発電機21Bから得られた電力を右舷側の軸発電機21Aへ供給するように信号を送信する(S52)。この場合、右舷側の軸発電機21Aは、電動機として作動する。電力制御システム23は、左舷側の軸発電機21Bが発生した電力を右舷側の軸発電機21Aを駆動する電力として供給する(S53)。
【0060】
統合制御装置2は、右舷側の主機遠隔制御装置22Aへ右舷側の推進用蒸気タービン3Aを出力制御するように信号を送信する(S52)。右舷側の主機遠隔制御装置22Aは、制御方法として出力制御を行う(S54)。右舷側の主機遠隔制御装置22Aは、操作信号から指示軸出力を算出し、右舷側の推進用蒸気タービン3Aのノズル弁へ出力の指示信号を送信する。右舷側の推進用蒸気タービン3Aのノズル弁は、出力の指示信号に応じて右舷側の推進用蒸気タービン3Aを増減速させるように開度が制御される(S55)。右舷側の推進用蒸気タービン3Aのノズル弁は、右舷側の推進蒸気タービン3Aの出力がステップS53で左舷側の軸発電機21Bから右舷側の軸発電機21Aへと供給された電力との合計である指示軸出力に一致するように右舷側の推進用蒸気タービン3Aを増減速させるようにステップS55が繰り返される(S56)。右舷側の軸発電機21Aに加勢された電力と出力制御されている右舷側の推進用蒸気タービン3Aの出力との合計出力が指示軸出力にまで達した後、右舷側のプロペラ軸17Aの実回転数と実軸出力と右舷側の電動機として作動している軸発電機21Aの受領電力との信号が、中央制御盤(S57)と右舷側の主機遠隔制御装置22Aとに送信される(S58)。
【0061】
統合制御装置2は、左舷側の主機遠隔制御装置22Bへ左舷側の推進用蒸気タービン3Bを弁リフト制御の後、出力制御によって制御するように信号を送信する(S52)。左舷側の主機遠隔制御装置22Bは、制御方法として弁リフト制御を行う(S59)。左舷側の主機遠隔制御装置22Bは、操作信号から指示弁リフトを算出し、左舷側の推進用蒸気タービン3Bのノズル弁へ弁リフトの指示信号を送信する。左舷側の推進用蒸気タービン3Bのノズル弁は、弁リフトの指示信号に応じて左舷側の推進用蒸気タービン3Bを増減速させるように開度が制御される(S60)。左舷側の推進用蒸気タービン3Bのノズル弁の制御は、左舷側の推進用蒸気タービン3Bの弁リフトの指示信号が指示弁リフトに一致するようにステップS60が繰り返される(S61)。左舷側の推進用蒸気タービン3Bのノズル弁の弁リフトが指示弁リフトにまで達した後、左舷側の主機遠隔制御装置22Bは、制御方法として出力制御を行う(S62)。左舷側の主機遠隔制御装置22Bは、操作信号から指示軸出力を算出し、左舷側の推進用蒸気タービン3Bのノズル弁へ出力指示の信号を送信する。左舷側の推進用蒸気タービン3Bのノズル弁は、出力指示の信号に応じて左舷側の推進用蒸気タービン3Bを増減速させるように開度が制御される(S63)。左舷側の推進用蒸気タービン3Bのノズル弁は、左舷側の推進用蒸気タービン3Bの出力が左舷側の軸発電機21Bにより発生される電力と指示軸出力との合計出力となるように、推進用蒸気タービン3Bに供給される蒸気量を制御するように開度が制御される。左舷側の推進用蒸気タービン3Bのノズル弁の制御は、左舷側のプロペラ軸17Bの実軸出力が指示軸出力に一致するようにステップS63が繰り返される(S64)。左舷側の推進用蒸気タービン3Bの出力により、左舷側のプロペラ軸17Bの実軸出力が指示軸出力にまで達した後、左舷側のプロペラ軸17Bの実回転数と実軸出力と左舷側の軸発電機21Bが発生する電力の信号とは、中央制御盤(S65)と左舷側の主機遠隔制御装置22Bとに送信される(S66)。
【0062】
なお、右舷側の軸発電機21Aに加勢された電力と右舷側の推進用蒸気タービン3Aの出力との合計出力が指示軸出力にまで達した後も、右舷側の軸発電機21Aに加勢された電力および右舷側の推進用蒸気タービン3Aの出力の合計出力は逐次監視され、指示軸出力と右舷側の軸発電機21Aに加勢された電力および右舷側の推進用蒸気タービン3Aの出力の合計出力とに偏差が生じた場合には、右舷側の軸発電機21Aに加勢された電力および右舷側の推進用蒸気タービン3Aの出力の合計出力が指示軸出力に一致するように右舷側の推進用蒸気タービン3Aの出力を増加または減少させるように出力制御が行われる。
【0063】
また、左舷側のプロペラ軸17Bの実軸出力が指示軸出力にまで達した後も、左舷側のプロペラ軸17Bの実回転数および実軸出力は逐次監視され、指示軸出力と実軸出力とに偏差が生じた場合には、指示軸出力に一致するように左舷側のプロペラ軸17Bの実軸出力を増加または減少させるように出力制御が行われる。
【0064】
以上の通り、本実施形態に係る統合制御装置2及びこれを備えた船舶によれば、以下の作用効果を奏する。
左舷側の軸発電機21Bで発生した電力の出力先を制御することとしたので、右舷側の軸発電機21A(負荷が不足している推進装置側の軸発電機)に電力を供給することができる。そのため、右舷側の推進装置1A(負荷が不足している推進装置)を加勢することできる。さらに、統合制御装置2は、両主機遠隔制御装置22A,22Bに各推進用蒸気タービン3A,3Bを出力制御するように信号を送信することとした。したがって、最終的に両推進装置1A,1Bの実軸出力が指示軸出力に一致するように調整されるため各推進装置1A,1Bの実軸出力を同期させることができ、推進軸19A,19Bの回転数を同期させることができる。
【0065】
[第4実施形態]
以下、本発明の第4実施形態について説明する。本実施形態の船舶および統合制御装置を備えている推進装置の構成及び運転方法は、両再熱器の運転が停止し両再熱器に供給される過熱蒸気供給ラインがバイパスされている点において第1実施形態と相違し、その他は同様である。したがって、同一の構成については、同一の符号を付してその説明を省略する。
【0066】
図8には、図1に示した推進装置のうち両再熱器および両再熱器へ過熱蒸気を供給する過熱蒸気供給ラインがバイパスされていることが示されている。
船舶が外洋航行中に、再熱器13A,13Bに設けられている蒸気が通過するチューブ(図示せず)等が損傷した場合には、再熱器13A,13Bの運転が停止される。再熱器13A,13Bの運転が停止しているため、前進用中圧タービン7A,7Bには過熱されていない温度の低下した蒸気が前進用高圧タービン6A,6Bから直接導かれることになる。一方、主ボイラ12A,12Bは正常稼働しているため、前進用高圧タービン6A,6Bには主ボイラ12A,12Bから主蒸気が導かれている。前進用中圧タービン7A,7Bと前進用高圧タービン6A,6Bとの間には、導かれている蒸気の温度差によってタービン軸方向に温度分布の偏りが生じる。このタービン軸方向の温度分布の偏りによって、タービン軸方向に不均一な熱膨張が生じる。そのために、前進用中圧タービン7A,7Bと前進用高圧タービン6A,6Bとの車室(図示せず)の水平継手面から蒸気漏れが発生する恐れが生じる。この蒸気漏れを防止して、各推進用蒸気タービン3A,3Bの安全な運用を行うために、両推進用蒸気タービン3A,3Bは規定回転数にまで自動減速される。これにより、船舶は、港湾航行速度を上限とした昇速制限によって運航される。
【0067】
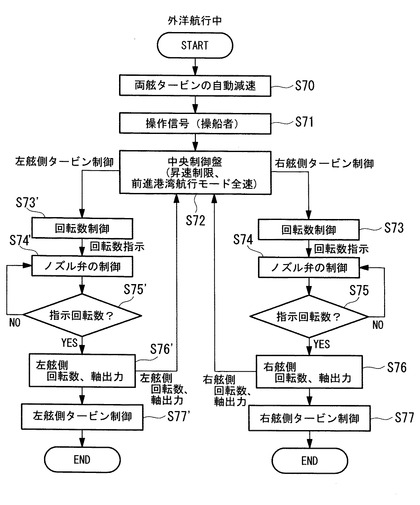
次に、図9に基づいて、船舶が外洋航行中に両再熱器が損傷した場合における制御について説明する。
再熱器13A,13Bが停止した場合には、両推進用蒸気タービン3A,3Bの安全装置(図示せず)である自動減速装置が作動する。これによって、両推進用蒸気タービン3A,3Bの出力が自動的に低下し、両推進装置1A,1Bの速度が減速される(S70)。これにより、船舶は、港湾航行速度に対応した速度にまで船速が減速される。両推進用蒸気タービン3A,3Bの自動減速後、操船者が船橋に設置されている制御盤に設けられているエンジンテレグラフによって船速度指示の操作信号を発信する(S71)。発信された操作信号と、両推進用蒸気タービン3A,3Bの自動減速及び両再熱器13A,13Bの停止の信号とは、中央制御盤内に設けられている統合制御装置2へ送信される。統合制御装置2は、両推進用蒸気タービン3A,3Bの出力を港湾航行速度を上限とした昇速制限までの出力制限とする(S72)。
【0068】
統合制御装置2は、各主機遠隔制御装置22A,22Bへ各推進用蒸気タービン3A,3Bを出力制御によって制御するように信号を送信する(S72)。各主機遠隔制御装置22A,22Bは、推進用蒸気タービン3A,3Bのノズル弁へ回転数の指示信号を送信する(S73,S73’)。各主機遠隔制御装置22A,22Bは、操作信号から指示回転数を算出する。また、各推進用蒸気タービン3A,3Bのノズル弁は、弁リフトの指示信号に応じて各推進用蒸気タービン3A,3Bを増減速させるように開度が制御される(S74,S74’)。各推進用蒸気タービン3A,3Bのノズル弁の制御は、各プロペラ軸17A,17Bの実回転数が指示回転数に一致するようにステップS74,S74’が繰り返される(S75,S75’)。各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後、各プロペラ軸17A,17Bの実回転数と実軸出力との信号が、中央制御盤(S76,S76’)と各主機遠隔制御装置22A,22Bとに送信される(S77,S77’)。
【0069】
なお、各プロペラ軸17A,17Bの実回転数が指示回転数にまで達した後も、各プロペラ軸17A,17Bの実回転数および実軸出力は逐次監視され、指示回転数と実回転数とに偏差が生じた場合には、指示回転数に一致するように各プロペラ軸17A,17Bの実回転数を増減速させる回転数制御が行われる。
【0070】
以上の通り、本実施形態に係る統合制御装置2及びこれを備える船舶によれば、以下の作用効果を奏する。
再熱器13A,13Bをバイパスしなければならい程度の重篤に不具合が生じた場合には、前進用高圧タービン6A,6Bと前進用中圧タービン7A,7B(再熱タービン内)へと供給される主蒸気と再熱器13A,13Bから供給される過熱蒸気との熱量に差を生じ、推進用蒸気タービン3A,3Bの温度分布に偏りが生じる。そのため、推進用蒸気タービン3A,3Bの車室の水平継手面内から蒸気漏れが発生する恐れがある。しかし、統合制御装置2は、推進用蒸気タービン3A,3Bを船舶の港湾航行速度に応じた回転数(規定回転数)にまで減速させ、回転数制御することとした。そのため、前進用高圧タービン6A,6Bと前進用中圧タービン7A,7Bとに供給される蒸気量が絞られて主蒸気と再熱器13A,13Bから供給される過熱蒸気との熱量の差が小さくなり、前進用高圧タービン6A,6Bと前進用中圧タービン7A,7Bの温度分布の偏りが小さくなる。従って、推進用蒸気タービン3A,3Bの安全な運転が可能となる。
【符号の説明】
【0071】
1A,1B 推進装置
2 統合制御装置
3A,3B 蒸気タービン(推進用蒸気タービン)
14A,14B 蒸気発生装置
19A,19B 推進軸
22A,22B 主機制御装置(主機遠隔制御装置)
【特許請求の範囲】
【請求項1】
蒸気タービンと、該蒸気タービンに接続された推進軸と、前記蒸気タービンに蒸気を供給する蒸気発生装置と、前記蒸気タービンを制御する主機制御装置と、を各々有した2つの推進装置を統合制御する統合制御装置であって、
各前記推進装置の運転状況と、各前記推進装置の出力と、各前記推進軸の回転数と、のいずれかに応じて、各前記蒸気タービンの制御を行うように各前記主機制御装置を制御することを特徴とする統合制御装置。
【請求項2】
各前記推進軸の回転数を指示回転数に一致するように増減速させる回転数制御とするように各前記主機制御装置を制御することを特徴とする請求項1に記載の統合制御装置。
【請求項3】
前記推進装置の一方が停止し指示出力が低下した場合には、一方の前記主機制御装置によって停止した一方の前記蒸気タービンの運転を停止させ、他方の前記主機制御装置によって指示出力に一致するように他方の前記蒸気タービンの出力を増加または減少させる出力制御とすることを特徴とする請求項1又は請求項2に記載の統合制御装置。
【請求項4】
各前記推進装置は、前記蒸気タービンの他端に軸発電機を有し、
各前記推進装置の出力に応じて、各前記軸発電機の電力の出力先の制御と、各前記主機制御装置によって各前記蒸気タービンの出力を増加または減少させる出力制御とすることを特徴とする請求項1から請求項3のいずれかに記載の統合制御装置。
【請求項5】
各前記蒸気発生装置は、再熱器を有し、
各前記蒸気タービンは、再熱タービンとされ、
前記再熱器が停止した場合には、各前記主機制御装置が各前記蒸気タービンを規定回転数に一致するように回転数を減速させ、回転数制御を行うことを特徴とする請求項1から請求項4のいずれかに記載の統合制御装置。
【請求項6】
請求項1から請求項5のいずれかに記載の統合制御装置を備えたことを特徴とする船舶。
【請求項1】
蒸気タービンと、該蒸気タービンに接続された推進軸と、前記蒸気タービンに蒸気を供給する蒸気発生装置と、前記蒸気タービンを制御する主機制御装置と、を各々有した2つの推進装置を統合制御する統合制御装置であって、
各前記推進装置の運転状況と、各前記推進装置の出力と、各前記推進軸の回転数と、のいずれかに応じて、各前記蒸気タービンの制御を行うように各前記主機制御装置を制御することを特徴とする統合制御装置。
【請求項2】
各前記推進軸の回転数を指示回転数に一致するように増減速させる回転数制御とするように各前記主機制御装置を制御することを特徴とする請求項1に記載の統合制御装置。
【請求項3】
前記推進装置の一方が停止し指示出力が低下した場合には、一方の前記主機制御装置によって停止した一方の前記蒸気タービンの運転を停止させ、他方の前記主機制御装置によって指示出力に一致するように他方の前記蒸気タービンの出力を増加または減少させる出力制御とすることを特徴とする請求項1又は請求項2に記載の統合制御装置。
【請求項4】
各前記推進装置は、前記蒸気タービンの他端に軸発電機を有し、
各前記推進装置の出力に応じて、各前記軸発電機の電力の出力先の制御と、各前記主機制御装置によって各前記蒸気タービンの出力を増加または減少させる出力制御とすることを特徴とする請求項1から請求項3のいずれかに記載の統合制御装置。
【請求項5】
各前記蒸気発生装置は、再熱器を有し、
各前記蒸気タービンは、再熱タービンとされ、
前記再熱器が停止した場合には、各前記主機制御装置が各前記蒸気タービンを規定回転数に一致するように回転数を減速させ、回転数制御を行うことを特徴とする請求項1から請求項4のいずれかに記載の統合制御装置。
【請求項6】
請求項1から請求項5のいずれかに記載の統合制御装置を備えたことを特徴とする船舶。
【図1】



【図2】

【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−37300(P2011−37300A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2009−183533(P2009−183533)
【出願日】平成21年8月6日(2009.8.6)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成21年8月6日(2009.8.6)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]