
緊急車両誘導装置、プログラム及び方法
【課題】緊急車両の走行経路に沿って、緊急車両がスムーズに走行できるように、走行経路に沿って存在する一連の交通信号機の信号パラメータを調整する。
【解決手段】緊急車両1が通過する経路上の交差点の渋滞状況、各交差点への到達時刻を考慮し、各交差点へ到達する時点で、当該緊急車両の走行道路で信号待ちしている車両が存在しなくなくなる、あるいは渋滞が解消されるように交通信号機6ごとに青信号時間TBを制御し、各交通信号機6に通知する。
【効果】各交通信号機6は、受信した青信号時間TBをもとに信号制御を行うので、緊急車両はスムーズに交差点を通過することができる。
【解決手段】緊急車両1が通過する経路上の交差点の渋滞状況、各交差点への到達時刻を考慮し、各交差点へ到達する時点で、当該緊急車両の走行道路で信号待ちしている車両が存在しなくなくなる、あるいは渋滞が解消されるように交通信号機6ごとに青信号時間TBを制御し、各交通信号機6に通知する。
【効果】各交通信号機6は、受信した青信号時間TBをもとに信号制御を行うので、緊急車両はスムーズに交差点を通過することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、緊急車両を迅速に目的地へ到達させるための交通信号機の信号パラメータを算出する技術に関するものである。一般に交通信号機の信号パラメータには、サイクル時間、スプリット、オフセットがある。サイクル時間とは「青,黄,赤」と一周期の変化に要する時間のことである。スプリットとは、一周期時間内に占める、ある方向が青表示である時間の割合である。オフセットとは、隣接する交通信号機との青表示開始時刻のずれのことである。
【背景技術】
【0002】
一般道路上を走行する消防自動車や警察の緊急自動車などの緊急車両を、短時間で目的地に誘導する技術が種々提案されている。緊急車両は、渋滞時には信号待ちで長時間停車を余儀なくされる。そこで、緊急車両の誘導には、交通信号機の信号パラメータを調整することが有効とされている。
例えば下記特許文献1には、車両(緊急車両でもよく、緊急車両以外の車両でもよい)から送信された渋滞判定のための情報及び当該車両の位置情報を受信し、受信した渋滞判定のための情報及び当該車両の位置情報に基づいて、交通信号機の制御情報を生成し、この制御情報を交通信号機へ送信する発明が記載されている。この文献における交通信号機の制御内容は、渋滞発生の有無及び渋滞度合いに応じて、サイクル時間、スプリット、オフセットなどの信号パラメータを適宜調整することである、とされている。
【特許文献1】特開2006-343814号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、緊急車両を短時間で目的地に誘導するためには、渋滞度に応じて、信号パラメータのどの部分をどのように具体的に調整するのか、という観点からの解析が求められる。
例えば、緊急車両の走行経路が分かっていて緊急車両の通過順に交通信号機の制御を行う場合、一番手前の交通信号機を青に強制点灯しても、渋滞が発生していれば一般の車両が進むことができず、緊急車両の走行を妨げる場合がある。また、次の信号を青にしても、その次の信号が赤のままだと、一般車両が動けず緊急車両の妨げになる場合がある。
【0004】
そこで本発明は、緊急車両の走行経路に沿って、緊急車両がスムーズに走行することができるように、走行経路に沿って存在する一連の交通信号機の信号パラメータを調整することのできる緊急車両誘導装置、プログラム及び方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の緊急車両誘導装置は、緊急車両の現在地情報と目的地情報に基づいて目的地までの経路を取得する経路取得手段と、前記経路に沿った交差点に存在する交通信号機の信号パラメータを算出する信号パラメータ算出手段と、算出された信号パラメータに基づく制御情報を交通信号機に通知する制御情報通知手段とを備え、前記信号パラメータ算出手段は、前記経路上の渋滞状況を把握して、渋滞状況に応じて、前記緊急車両が当該経路に沿った交差点を通過する時点で、渋滞が解消するように前記交通信号機の信号パラメータを算出することを特徴とする(請求項1)。
【0006】
この発明によれば、緊急車両から現在地、目的地情報を受信すると、現在の渋滞状況を考慮した目的地までの経路を取得する。取得した経路上の交差点の渋滞状況、各交通信号機への到達時刻を考慮し、各交差点へ到達する時点で、緊急車両の走行道路の渋滞が解消されるように交通信号機ごとに信号パラメータを算出し、各交通信号機に信号パラメータに基づく制御情報を通知することができる。各交通信号機は、受信した信号パラメータをもとに信号制御を行うので、緊急車両はスムーズに交差点を通過することができる。
【0007】
前記緊急車両誘導装置は、車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するプローブ情報収集手段を備え、前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点の信号待ち停車末尾位置を推定し、この推定された信号待ち停車末尾位置を用いて信号待ち車両台数を求めることにより、信号待ち停車している車両が青信号で通過できる青信号時間を設定するものであっても良い(請求項2)。このようにして、プローブ情報収集手段により車両の走行情報を受信し、その走行情報に基づいて、各交差点の方向別の渋滞状況を把握し、渋滞が解消するように青信号時間を設定することができる。
【0008】
信号待ち停車末尾位置の推定は、当該車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該車両停止時の赤信号経過時間とに基づき、行うこともできる(請求項3)。
また、プローブ情報を収集した車両が2台である場合には、当該各車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該各車両停止時の赤信号経過時間とに基づき、交差点の信号待ち停車末尾位置を推定することもできる(請求項4)。
【0009】
前記信号パラメータ算出手段は、交差点における前記経路に沿った道路の交通容量(後に説明する(4)式におけるNY)を考慮した上で、信号待ち停車している車両が青信号で通過できるように青信号時間を設定することが好ましい(請求項5)。特に交通容量を考慮することにより、信号パラメータの制御精度を上げることができる。
前記信号パラメータ算出手段は、プローブ情報を収集した同一の車両が同一交差点で、2回続いて赤信号で停車した場合に、当該車両の各停止時の交差点からの距離と、当該交差点の青信号の時間とに基づき、信号待ち台数を推定することができるので、前記経路に沿った道路の交通容量を求めることができる(請求項6)。
【0010】
前記信号パラメータ算出手段は、同一交差点を複数の緊急車両が通過する場合は、各緊急車両から受信した緊急度情報から緊急車両の優先度付けを行い、信号パラメータの算出を行うことが好ましい(請求項7)。この処理は、複数の緊急車両が同一の交差点を違う方向から通過する場合に有効な制御となる。
前記信号パラメータ算出手段は、各交差点の渋滞状況の把握を車線ごとに行い、車線単位の渋滞状況を考慮した信号パラメータの算出を行うことが好ましい(請求項8)。複数の車線を有する道路の場合、渋滞度は車線ごとに異なる場合があるため、車線ごとに渋滞状況の把握を行えば、より精度の高い信号パラメータの算出をすることができる。
【0011】
前記信号パラメータ算出手段は、信号パラメータを送信後も緊急車両が通過予定の交差点の渋滞状況を確認し、緊急車両の通過予定の経路の渋滞が解消されていない場合は、再度、信号パラメータを算出することが好ましい(請求項9)。この再算出により、渋滞度が時間の経過とともに変わっていく場合であっても、緊急車両をスムーズに通過させるための信号パラメータを最適なものに更新することができる。
【0012】
本発明の緊急車両誘導プログラムは、コンピュータに格納されて実行されるプログラムであって、実質的に前記緊急車両誘導装置の発明と同一の発明に係るプログラムである(請求項10)。
また、本発明の緊急車両誘導方法は、実質的に前記緊急車両誘導装置の発明と同一の発明に係る方法である(請求項11)。
【発明の効果】
【0013】
以上のように本発明によれば、緊急車両通過が最短で目的地に到達できる経路を提供するとともに、直近の交通信号機の制御だけでなく、緊急車両の走行する経路上の全ての交差点の交通信号機の制御を行うことにより、緊急車両がその経路をスムーズに走行できるように信号パラメータを調整することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施の形態を、添付図面を参照しながら詳細に説明する。
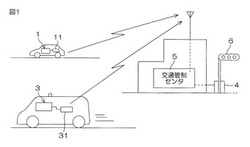
図1は、本発明の緊急車両誘導装置を含む緊急車両誘導システムの全体構成を示す図である。
緊急車両誘導システムは、交通管制センタ5と、緊急車両の車載装置3とを含み、プローブ車両に搭載された車載装置1を利用するものである。この交通管制センタ5が本発明の緊急車両誘導装置の機能を果たす。「プローブ車両」とは、交通管制センタ5との通信により、車両の走行軌跡、速度などの情報をアップリンクすることができる車両をいう。
【0015】
プローブ車両の車載装置1は、車両識別のためのコードを持ち、このコードを用いて交通管制センタ5と通信することができる。車載装置1は、当該車両の時刻ごとの位置、速度等の情報(走行情報という)を生成し送信する。
緊急車両の車載装置3は、目的地情報(経路計算条件を含む)を設定し、設定された目的地情報を交通管制センタ5に送信する。交通管制センタ5は、交通信号機6の制御装置4と通信回線で接続されていて、制御装置4に対し、信号パラメータに基づく制御情報を送信する。制御装置4は受信した制御情報に基づいて交通信号機6の信号を制御する。
【0016】
車載装置1,3と交通管制センタ5との間の通信を行う通信機11,31には、携帯電話機などの広域通信方式を用いることができる。また、路上通信機を介することを前提にするならば、車載装置1,3と路上通信機との間で、光ビーコン、無線LAN、DSRC(Dedicated Short Range Communication)等の、比較的エリアの狭い通信方式を用いることもでき、この場合、路上通信機と交通管制センタ5との間は、専用通信回線で接続することになる。前記路上通信機の設置場所は、車両と通信できる場所であれば任意であり、例えば、交通信号機6の設置場所と同一または交通信号機6の近くであってもよい。
【0017】
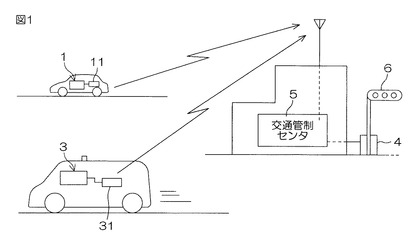
図2は、車載装置1の内部構成を示すブロック図である。車載装置1は、交通管制センタ5との間で路車間通信を行う通信機11、人工衛星の電波を利用して時刻ごとの車両位置検出を行うGPS受信機13、車両の速度パルスに基づいて車両の速度データを得る車速センサ15、車両の方位データを得る方位センサ17、前記GPS受信機13、車速センサ15及び方位センサ17等から得られる各種データに基づいて車両の時刻ごとの位置、速度などの走行情報を算出し通信機11に供給するための演算装置19、ドライバに案内情報(緊急車両の接近情報など)を伝えるスピーカ23、表示装置25、並びに算出された位置、時刻のデータを一時的に記憶するメモリ21を備えている。
【0018】
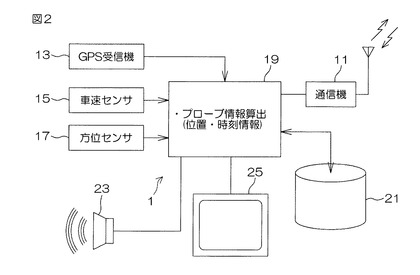
図3は、緊急車両の車載装置3の内部構成を示すブロック図である。車載装置3は、交通管制センタ5との間で路車間通信を行う通信機31、人工衛星の電波を利用して時刻ごとの車両位置検出を行うGPS受信機33、車両の速度パルスに基づいて車両の速度データを得る車速センサ35、車両の方位データを得る方位センサ37、前記GPS受信機33、車速センサ35及び方位センサ37等から得られる各種データに基づいて車両の時刻ごとの位置などの走行情報を算出するとともに、目的地を設定し、前記走行情報、目的地情報を通信機31に供給するナビゲーション装置39、緊急車両のドライバに案内情報を伝えるスピーカ43、地図を表示して車両の現在地、目的地までの経路などを緊急車両のドライバに指示するための表示装置45、表示装置45に付属するタッチキー47、並びに道路地図データを格納している道路地図データ41を備えている。
【0019】
前記ナビゲーション装置39は、設定した目的地情報及び車両の現在時刻の位置(現在地)に基づいて目的地に到達するための最短時間経路又は最短距離経路(以下「最適経路」という)を、交通管制センタ5から通信機31を通して受信することができる。なお、前記ナビゲーション装置39は、最適経路を、通信機31を通して交通管制センタ5から受信することとともに、あるいは受信することに代えて、自ら最適経路を算出する機能を有していてもよい。
【0020】
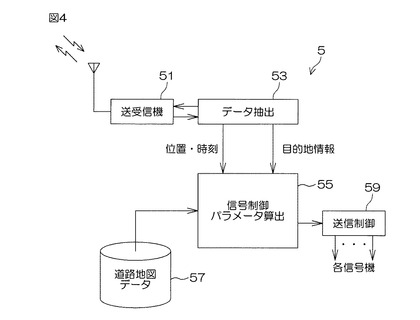
図4は、交通管制センタ5の内部構成を示すブロック図である。交通管制センタ5は、プローブ車両の車載装置1から走行情報を含む通信信号を受信し、緊急車両の車載装置3から走行情報、目的地情報を含む通信信号を受信するための送受信機51、通信信号の中から目的地情報・走行情報などを抽出するデータ抽出部53、信号パラメータ算出部55、道路マッチング処理に用いるための道路地図データ57、算出された信号パラメータを交通信号機6の制御装置4に送信するため制御情報を作成する送信制御部59を備えている。
【0021】
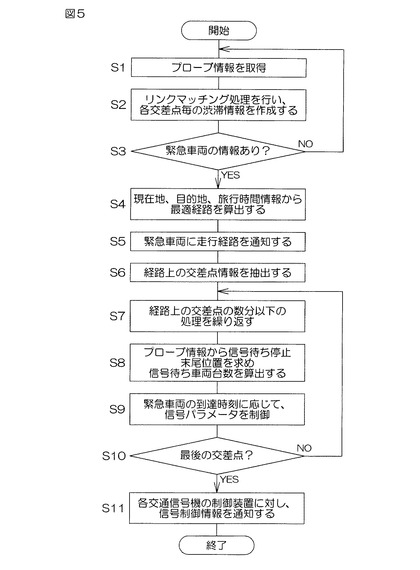
以下、信号パラメータ算出部55が実行する処理を、フローチャート(図5)を用いて詳説する。この信号パラメータ算出部55の機能の全部又は一部は、CD−ROMやハードディスクなど所定の媒体に記録されたプログラムを、交通管制センタ5のコンピュータが実行することにより実現される。
まず、信号パラメータ算出部55は、プローブ車両の車載装置1から走行情報(プローブ情報という)を取得する(ステップS1)。そしてこれらの取得したプローブ情報に基づいて、各プローブ車両について道路マッチング処理(プローブ車両の軌跡を地図上の道路区間に沿わせるための処理)を行い、交差点ごとの渋滞情報を作成する(ステップS2)。
【0022】
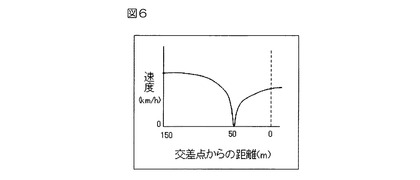
この渋滞情報作成処理は、プローブ情報に基づいて信号待ち停車末尾位置を検出する処理である。図6、図7を用いて詳しく説明する。
(a)1回の信号サイクル時間で取得したプローブ情報が1件の場合
例えばプローブ情報から得られる、車両の速度と、交差点からの距離との関係が、図6のように、交差点の手前50mの位置で車両が停止しているものとする。
【0023】
この場合、信号パラメータの情報とプローブ情報から、プローブ車両の停車時間と赤信号時間との関係を求める。赤信号時間が60秒、車両の停止開始時刻が赤信号点灯開始から30秒経過後とすると、赤信号の点灯から30秒間で50mまで信号待ち停車末尾位置が延びたことになり、1回の赤信号の最終的な信号待ち停車末尾位置は100m(=50m×(60秒÷30秒))と予測できる。車の平均車長と平均車間距離との和を5mとすると、信号待ち車両台数は20台と推測できる。
【0024】
一般に、信号待ち停車末尾位置Lは、次の(1)式を用いて推定される。
L=LS×(TR÷TΔR) (1)
ここで、LS:車両停止時の交差点からの距離、TR:赤信号の時間、TΔR:車両停止時の赤信号経過時間である。
(b)1回の信号サイクルで取得したプローブ情報が2件以上ある場合
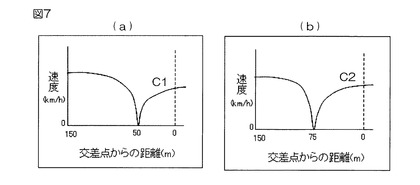
1回の信号サイクルの間に、図7(a),(b)に示すようにプローブ情報が2件受信された場合、それらのプローブ車両をC1,C2で表す。プローブ車両C1,C2の車両停止時刻と、車両停止位置(交差点からの距離)情報から信号待ち停車末尾位置を検知する。
【0025】
例えば赤信号の時間が60秒、プローブ車両C1の停止開始時刻が赤信号点灯から30秒経過後、プローブ車両C2の停止開始時刻が赤信号点灯から40秒経過後とすると、直近の10秒間で25m渋滞末尾が延びたことになり、最終的な信号待ち停車末尾位置は、125m(=75m+25m×(60−40)÷(40−30))と予測できる。
一般に、信号待ち停車末尾位置Lは、次の(2)式で推定される。
【0026】
L=LS2+[(LS2−LS1)×(TR−TΔR2)÷(TΔR2−TΔR1)](2)
ここで、LS1、LS2:車両停止時の交差点からの距離、TR:赤信号の時間、TΔR1、TΔR2:各車両停止時の赤信号経過時間である。
ただし、プローブ車両C1とプローブ車両C2の停止開始時の赤信号経過時間の差(TΔR2−TΔR1)が所定値(例えば、10秒)以下の場合は、プローブ車両C2の情報だけで信号待ち停車末尾位置の算出を行うことが好ましい。この理由は、赤信号経過時間の差(TΔR2−TΔR1)が小さい値のときは、それを分母として計算したとき、誤差が大きくなるからである。
【0027】
なお1回の信号サイクルで、プローブ情報が3件以上ある場合は、当該サイクル内での最後の情報と1つ前の情報(赤信号経過時間の差が所定値(例えば、10秒)以下の場合は、所定値以上になるまで、前の情報に遡る)から算出してもよい。なお1回の信号サイクルで、プローブ情報が2件以上ある場合も、最後の1件の情報だけで信号待ち停車末尾位置を算出してもよい。
【0028】
次に、緊急車両の車載装置3から、現在地、目的地情報を受信しているかどうか参照する(図5;ステップS3)。現在地、目的地情報を受信していれば、現在地、目的地、道路の旅行時間情報に基づいて目的地に到達するための最適経路を算出する(ステップS4)。なお、道路の旅行時間情報は、交通管制センタ5が外部機関から取得している情報である。
【0029】
この最適経路算出処理の概要を説明すると、目的地に至る各経路を構成する通過道路区間の旅行時間を加算していって、最終的に最短で目的地に到達できる経路を特定し、その経路を構成する道路区間を決定する処理である。
最適経路が算出できれば、その最適経路の情報を緊急車両に通知する(ステップS5)。
【0030】
なお、緊急車両のナビゲーション装置39が最適経路を算出する機能を有している場合、緊急車両側で最適経路を算出してもよい。この場合、逆に、緊急車両が、その最適経路の情報を交通管制センタ5に通知することになる。
そして、最適経路の情報を把握した交通管制センタ5は、その緊急車両が現在地から目的地まで通過する経路上の交差点情報を抽出する(ステップS6)。
【0031】
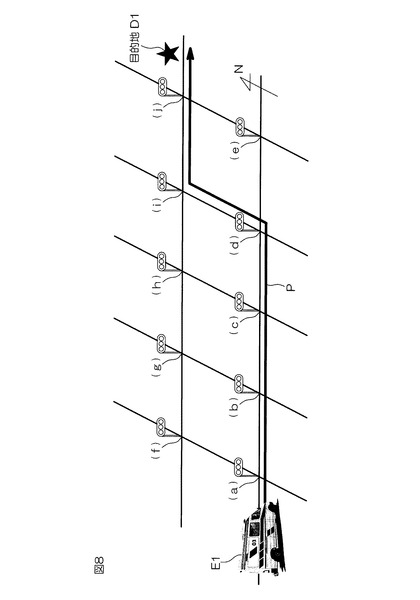
図8は、道路地図とその地図上にある交差点(a)〜(j)を示す図である。緊急車両E1を車のアイコンで、目的地D1を星印で表している。東西南北の方位は、図8に示すとおり、図の上側を北とする。
緊急車両E1の現在地、目的地情報より、交差点(a)→(b)→(c)→(d)→(i)→(j)の順に通過する最適経路Pが算出されたものとする。最適経路Pに沿った各交差点(a),(b),(c),(d),(i),(j)について、各交差点への緊急車両E1の到達時刻を計算し、各交差点への進入道路の信号待ち停車末尾位置を求め、信号待ち車両台数を算出する(ステップS8)。
【0032】
各交差点への現在時刻からの到達時間、交差点への進入道路の信号待ち車両台数が以下の表1のとおりであるとする。
【0033】
【表1】

【0034】
信号パラメータ算出部55は、前記結果をもとに信号パラメータの算出を行い(ステップS9)、各交通信号機の制御装置4にその信号パラメータに基づく制御情報を通知する(ステップS11)。
以上の処理を各交差点について行う(ステップS7→S10)。
ここで信号パラメータの算出について説明する。モデルを簡単にするため、全ての交差点のサイクル時間を2分に固定し、その中の青信号の時間TB (秒)の調整を行う。青時間TBを、次の式で求めるものとする。
【0035】
TB=60×(2N÷NS)×a (3)
ここで、N:交差点の信号待ち車両台数、NS:交差点に進入する車両が当該交差点を通過できる単位時間(分)あたりの台数(交通容量という。飽和交通流率ともいう。)である。(3)式ではNS=30台/分と固定する。
前記(3)式で、2Nとする理由は、Nは赤信号の間に発生する信号車両待ち車両台数であり、青信号の間にも同等の数の車両が到達すると考えて2倍しているからである。NSで割っているのは、NSが1分間で交差点を通過できる台数であるので、2Nの台数が通過するのに何分必要かを求めるためである。60をかけているのは、(2N/NS)の単位が分であるので、秒単位にするためである。また、前記(3)式で、信号待ち車両台数は、あくまで推定値となるため、ある程度余裕をみて青信号時間を長くするために係数a(a>1)を掛けている。
【0036】
この(3)式を用いて計算した青信号時間TBを、交通信号機の制御に適用することにより、交差点で信号待ち停車している車両が青信号ですべて発進して交差点からなくなるようになる。
青信号時間TBの計算例は、表2のとおりとなる。
【0037】
【表2】
【0038】
この表2によれば、緊急車両E1が当該交差点に到達する時間が1分以内の場合、交差点の進入方向の信号は、車両が通過するまで青にする。1分以上5分未満の場合、a=2として青信号時間TBを計算する。ただし、TB<60ならTB=60、TB>100ならTB=100とする。このように、TBに上限を設けるのは、1サイクル時間に占める青時間を長くしすぎると、交差する(他のフェーズの)道路の交通量が減少してしまい渋滞を招くからである。この例では、1サイクル時間を2分(120秒)と仮定しているので、青信号時間の上限を100秒として、赤(黄・全赤を含む)の時間も最低20秒確保している。また、交通量が少なく青時間を60秒以下にできる場合も、緊急車両E1が通過するので、最低半分の時間を青信号にしておくために、最低60秒としている。
【0039】
到達時間が5分以上10分未満の場合、a=1.5とする。10分以上の場合、a=1.2とする。このように、係数aの値を減少させているのは、あまり早く(到達するかなり前から)青信号を長くすると、交差する道路の渋滞が発生しやすいため、救急車の到達がまだ先の場合は、余裕分を少なくし、青の時間があまり長くなりすぎないようにするためである。
【0040】
以上の(3)式を用いた算出方法により、各交差点の進入道路の青信号の時間を計算すると表3のとおりとなる。
【0041】
【表3】
【0042】
なお、前記(3)式において、係数aを、緊急車両の到達時刻によらず固定値(例えばa=1.5)としてもよい。
また、青信号時間も信号待ち車両台数によらず固定値(例えば、90秒)としてもよく、通常の青信号の時間である60秒に対して定数倍(例えば、1.5倍)としてもよい。また、交差点(b)以降についても、緊急車両E1の到達予定時刻の1分前から進入道路の信号を青信号にすることが好ましい。
【0043】
いままでの説明では、車両が交差点を通過できる単位時間(分)あたりの台数(交通容量)NSを固定値としたが、実際、青信号で単位時間あたりに交差点を通過できる車両の台数は、交差点の形状や駐車台数や工事等により変化する。例えば、一車線の道路の場合、左折方向の歩行者数が多い場合や、右折専用レーンがない場合、交通容量が小さくなる。複数車線の道路の場合、駐車や工事により車線規制されている場合は交通容量が小さくなる。このように各交差点の道路事情に応じて通過可能台数は異なる。そこで、各交差点の進入道路の交通容量も考慮した青信号時間の算出を行う。
【0044】
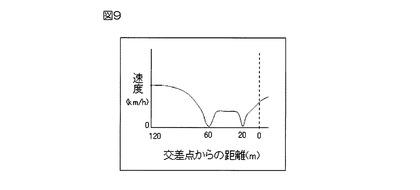
図9は、プローブ情報から得られる、速度と交差点からの距離との関係を示す。プローブ車両は、図示のように、交差点の渋滞のため同一交差点の2回続く赤信号で停車しているものとする。一回目の停車位置は、交差点から60m、二回目の停車位置は、交差点から20mであるとする。この場合、1回の青信号の時間内で車両が進んだ距離は、40mである。平均車長と平均車間距離との和を5mとすると、当該車線を青信号で通過できた台数は8台であることがわかり、交通容量を推定できる。
【0045】
信号待ちによる2回停車が発生していない場合は、1回の信号待ち停車後に車両が進む距離の最大値を交通容量とすればよい。ただし、最大値が標準的な交通容量とされている30台/分より小さくなる場合は、交通容量を標準値の30台/分としてもよい。
各交差点への現在時刻からの到達時間、進入道路の信号待ち車両台数、交通容量NYが表4のようになる場合を考える。
【0046】
【表4】
【0047】
青時間TBは次の式で表すものとする。
TB=60×(2N÷NY)×a (4)
ここで、N:信号待ち車両台数、NY:交差点に進入する車両が交差点を通過できる単位時間(分)あたりの台数(交通容量)である。今回はNYを固定しないものとする。
前記(4)式は、交差点への現在時刻からの到達時間に応じて次の表5のようになる。
【0048】
【表5】
【0049】
前記(4)式を用いて青信号時間TBを計算した結果は以下の表6のようになる。
【0050】
【表6】
【0051】
表6において、交差点(b),(j)の青信号時間が表3と比べて長くなっているが、これは交差点(b),(j)への進入道路の交通容量NYが小さいためである。また交差点(i)の青信号時間が表3と比べて短くなっているが、これは交差点(i)の進入道路の交通容量NYが大きいためである。
次に、複数の緊急車両が同一交差点をある所定時間内(例えば、10分以内)に続けて通過する予定の場合、緊急車両の優先度に応じて信号パラメータの制御を行う例を説明する。
【0052】
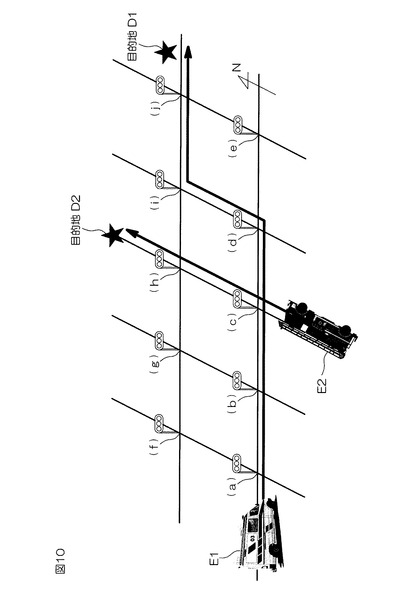
図10は、道路地図とその地図上にある交差点(a)〜(j)を示す図であり、2台の緊急車両E1,E2が描かれている。緊急車両E1は救急車のアイコン、緊急車両E2は消防車のアイコンで表している。各緊急車両E1の目的地をそれぞれD1,D2で表す。緊急車両E1は、交差点(a)→(b)→(c)→(d)→(i)→(j)の順に通過し、緊急車両E2は、交差点(c)→(h)の順に通過するものとする。緊急車両E1,E2は、同一交差点(c)を続けて通過する予定である。
【0053】
図10の場合において、緊急車両E1,E2がそれぞれ通過する予定の交差点(c)の青信号時間の設定は、次のように行う。
交差点(c)について、交通信号機の2分のサイクル時間に対し、以上に説明した(3)式又は(4)式で求められた、緊急車両E1が西から東へ進む道路に適用される青時間は100秒であったとする。また、緊急車両E1のことをまったく考慮せずに、緊急車両E2が南から北へ進む道路に適用される青時間は80秒であったとする。
【0054】
ここで緊急車両E1,E2の優先度を設定する。優先度は、緊急車両E2が緊急車両E1よりも高いものとし、交差点(c)では南から北方向の青信号時間を優先して、南→北:80秒、西→東:40秒(=120−80)の設定を行う。
緊急車両E2が交差点(c)を通過した時点で、交差点(c)の信号パラメータを緊急車両E1優先の設定に変更する。その結果、西→東:100秒、南→北:20秒となる。
【0055】
また、優先度の高い緊急車両E2の到達が緊急車両E1の到達から所定時間以上(例えば、2分以上)遅れるのであれば、まず優先度よりも、先に通過する緊急車両E1の青信号時間を優先にして、緊急車両E2が交差点(c)を通過した時点で、交差点(c)の信号パラメータを緊急車両E1優先の設定に変更してもよい。
今までの説明では、交差点に進入する道路に複数の車線があっても、特に車線を意識せずに、1本の道路として処理していたが、高精度位置認識技術が確立し、高精度地図データベースが整備されることを前提とすれば、走行車線の認識が十分に可能となる。
【0056】
このときは、プローブ情報から走行車線の認識を行うことができるので、車線ごとの信号待ち停車末尾位置、及び交通容量を算出することができる。
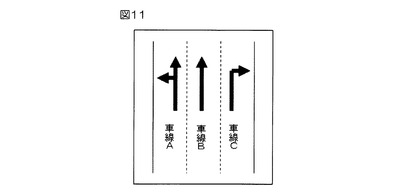
例えば、図8の交差点(d)に進入する道路が、図11に示されるように、3本の車線を持っているものとする。左車線Aは直進・左折用、中央車線Bは直進用、右車線Cは右折用の車線であるとする。
【0057】
各車線の信号待ち車両台数が、それぞれ、車線A:10台、車線B:10台、車線C:5台であり、交通容量(台/分)が、それぞれ、車線A:20台、車線B:30台、車線C:30台とする。
交差点(d)を左折通過する車線Aのプローブ情報をもとに信号情報を制御する場合、(4)式に従って青信号時間を計算すると、100秒と算出される。車線Bの情報をもとに信号情報を制御した場合、(4)式に従って青信号時間を計算すると、交通容量の違いに応じて80秒と算出される。
【0058】
このように、車線ごとに最適な青信号時間を算出することができるので、緊急車両が当該交差点を左折する場合100秒を適用し、直進する場合80秒を適用すれば、さらに交通の実態に即した緊急車両の信号誘導システムを構築することができる。
また、走行車線の認識が行えない場合は、緊急車両が左折することが予定されている場合、プローブ情報から当該交差点で左折した車両を認識し、そのプローブ情報から左折車線の信号待ち停車末尾位置や交通容量を算出し、信号パラメータを算出してもよい。
【0059】
交通管制センタ5は、緊急車両の接近情報を、緊急車両の周辺を走行する各プローブ車両に通知することとしてもよい。通知を受けた各車両の車載システムは、スピーカ23を通して音声にて、あるいは、表示装置25を通して画面表示にて、緊急車両の接近情報をドライバに通知することができる。このようにドライバに緊急車両の接近情報を通知することで、ドライバに安心感を与えることができる。
【0060】
また、交通管制センタ5は、緊急車両の接近情報を、道路の情報掲示装置に通知し、緊急車両の接近を道路情報掲示板で表示するようにしてもよい。道路情報掲示板の表示により、道路を走行する全車両に対して緊急車両の接近を通知することができる。交通管制センタ5と通信できない車両も存在することを考慮すると、道路情報掲示板は、有効な通知手段になる。
【0061】
以上で、本発明の実施の形態を説明したが、本発明の実施は、前記の形態に限定されるものではない。例えば、以上に説明した緊急車両誘導装置において、交通管制センタ5は、緊急車両が目的地に向けて走行を始める前に最適経路計算、信号パラメータの算出を行っていたが、緊急車両が走行を始めた後も、定期的(例えば、2分ごと)に通過予定交差点の渋滞状況(信号待ち停車末尾位置)の確認を行い、信号待ち停車末尾位置が変更している交差点については、青信号時間の再計算を行い、信号パラメータの再計算を行うことが好ましい。信号待ち停車末尾位置は、時々刻々変わっていくことが多いので、緊急車両をスムーズに通過させるための信号パラメータを、常に最適なものに更新することができる。
【0062】
また、交通管制センタ5はプローブ車両から受信した走行情報に基づいて各交差点の渋滞状況の把握を行っていたが、交通管制センタ5が外部機関から各道路の渋滞長の情報を取得できるのであれば、その取得した情報を活用してもよい。また、各交差点付近に設置された車両検知器からの検知情報に基づいて、信号待ち停車末尾位置を推定しても良い。
【図面の簡単な説明】
【0063】
【図1】本発明の緊急車両誘導装置を含む緊急車両誘導システムの全体構成を示す図である。
【図2】車載装置1の内部構成を示すブロック図である。
【図3】緊急車両の車載装置3の内部構成を示すブロック図である。
【図4】交通管制センタ5の内部構成を示すブロック図である。
【図5】信号パラメータ算出部55の処理をフローチャートである。
【図6】プローブ情報から得られる、速度と交差点からの距離との関係を示すグラフである。
【図7】2台のプローブ情報から得られる、速度と交差点からの距離との各関係を示すグラフである。
【図8】道路地図とその地図上にある交差点(a)〜(j)を示す図である。
【図9】プローブ情報から得られる、速度と交差点からの距離との関係を示すグラフである。
【図10】道路地図とその地図上にある交差点(a)〜(j)を示す図であり、2台の緊急車両E1,E2が描かれている。
【図11】交差点に進入する3本の斜線を持っている道路を示す地図である。
【符号の説明】
【0064】
1 プローブ車両の車載装置
3 緊急車両の車載装置
4 信号機の制御装置
5 交通管制センタ
6 交通信号機
11,31 通信機
13,33 GPS受信機
15,35 車速センサ
17,37 方位センサ
19 演算装置
39 ナビゲーション装置
41 道路地図データ
51 送受信機
53 データ抽出部
55 信号パラメータ算出部
57 道路地図データ
59 送信制御部
(a)〜(j) 交差点
【技術分野】
【0001】
本発明は、緊急車両を迅速に目的地へ到達させるための交通信号機の信号パラメータを算出する技術に関するものである。一般に交通信号機の信号パラメータには、サイクル時間、スプリット、オフセットがある。サイクル時間とは「青,黄,赤」と一周期の変化に要する時間のことである。スプリットとは、一周期時間内に占める、ある方向が青表示である時間の割合である。オフセットとは、隣接する交通信号機との青表示開始時刻のずれのことである。
【背景技術】
【0002】
一般道路上を走行する消防自動車や警察の緊急自動車などの緊急車両を、短時間で目的地に誘導する技術が種々提案されている。緊急車両は、渋滞時には信号待ちで長時間停車を余儀なくされる。そこで、緊急車両の誘導には、交通信号機の信号パラメータを調整することが有効とされている。
例えば下記特許文献1には、車両(緊急車両でもよく、緊急車両以外の車両でもよい)から送信された渋滞判定のための情報及び当該車両の位置情報を受信し、受信した渋滞判定のための情報及び当該車両の位置情報に基づいて、交通信号機の制御情報を生成し、この制御情報を交通信号機へ送信する発明が記載されている。この文献における交通信号機の制御内容は、渋滞発生の有無及び渋滞度合いに応じて、サイクル時間、スプリット、オフセットなどの信号パラメータを適宜調整することである、とされている。
【特許文献1】特開2006-343814号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、緊急車両を短時間で目的地に誘導するためには、渋滞度に応じて、信号パラメータのどの部分をどのように具体的に調整するのか、という観点からの解析が求められる。
例えば、緊急車両の走行経路が分かっていて緊急車両の通過順に交通信号機の制御を行う場合、一番手前の交通信号機を青に強制点灯しても、渋滞が発生していれば一般の車両が進むことができず、緊急車両の走行を妨げる場合がある。また、次の信号を青にしても、その次の信号が赤のままだと、一般車両が動けず緊急車両の妨げになる場合がある。
【0004】
そこで本発明は、緊急車両の走行経路に沿って、緊急車両がスムーズに走行することができるように、走行経路に沿って存在する一連の交通信号機の信号パラメータを調整することのできる緊急車両誘導装置、プログラム及び方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の緊急車両誘導装置は、緊急車両の現在地情報と目的地情報に基づいて目的地までの経路を取得する経路取得手段と、前記経路に沿った交差点に存在する交通信号機の信号パラメータを算出する信号パラメータ算出手段と、算出された信号パラメータに基づく制御情報を交通信号機に通知する制御情報通知手段とを備え、前記信号パラメータ算出手段は、前記経路上の渋滞状況を把握して、渋滞状況に応じて、前記緊急車両が当該経路に沿った交差点を通過する時点で、渋滞が解消するように前記交通信号機の信号パラメータを算出することを特徴とする(請求項1)。
【0006】
この発明によれば、緊急車両から現在地、目的地情報を受信すると、現在の渋滞状況を考慮した目的地までの経路を取得する。取得した経路上の交差点の渋滞状況、各交通信号機への到達時刻を考慮し、各交差点へ到達する時点で、緊急車両の走行道路の渋滞が解消されるように交通信号機ごとに信号パラメータを算出し、各交通信号機に信号パラメータに基づく制御情報を通知することができる。各交通信号機は、受信した信号パラメータをもとに信号制御を行うので、緊急車両はスムーズに交差点を通過することができる。
【0007】
前記緊急車両誘導装置は、車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するプローブ情報収集手段を備え、前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点の信号待ち停車末尾位置を推定し、この推定された信号待ち停車末尾位置を用いて信号待ち車両台数を求めることにより、信号待ち停車している車両が青信号で通過できる青信号時間を設定するものであっても良い(請求項2)。このようにして、プローブ情報収集手段により車両の走行情報を受信し、その走行情報に基づいて、各交差点の方向別の渋滞状況を把握し、渋滞が解消するように青信号時間を設定することができる。
【0008】
信号待ち停車末尾位置の推定は、当該車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該車両停止時の赤信号経過時間とに基づき、行うこともできる(請求項3)。
また、プローブ情報を収集した車両が2台である場合には、当該各車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該各車両停止時の赤信号経過時間とに基づき、交差点の信号待ち停車末尾位置を推定することもできる(請求項4)。
【0009】
前記信号パラメータ算出手段は、交差点における前記経路に沿った道路の交通容量(後に説明する(4)式におけるNY)を考慮した上で、信号待ち停車している車両が青信号で通過できるように青信号時間を設定することが好ましい(請求項5)。特に交通容量を考慮することにより、信号パラメータの制御精度を上げることができる。
前記信号パラメータ算出手段は、プローブ情報を収集した同一の車両が同一交差点で、2回続いて赤信号で停車した場合に、当該車両の各停止時の交差点からの距離と、当該交差点の青信号の時間とに基づき、信号待ち台数を推定することができるので、前記経路に沿った道路の交通容量を求めることができる(請求項6)。
【0010】
前記信号パラメータ算出手段は、同一交差点を複数の緊急車両が通過する場合は、各緊急車両から受信した緊急度情報から緊急車両の優先度付けを行い、信号パラメータの算出を行うことが好ましい(請求項7)。この処理は、複数の緊急車両が同一の交差点を違う方向から通過する場合に有効な制御となる。
前記信号パラメータ算出手段は、各交差点の渋滞状況の把握を車線ごとに行い、車線単位の渋滞状況を考慮した信号パラメータの算出を行うことが好ましい(請求項8)。複数の車線を有する道路の場合、渋滞度は車線ごとに異なる場合があるため、車線ごとに渋滞状況の把握を行えば、より精度の高い信号パラメータの算出をすることができる。
【0011】
前記信号パラメータ算出手段は、信号パラメータを送信後も緊急車両が通過予定の交差点の渋滞状況を確認し、緊急車両の通過予定の経路の渋滞が解消されていない場合は、再度、信号パラメータを算出することが好ましい(請求項9)。この再算出により、渋滞度が時間の経過とともに変わっていく場合であっても、緊急車両をスムーズに通過させるための信号パラメータを最適なものに更新することができる。
【0012】
本発明の緊急車両誘導プログラムは、コンピュータに格納されて実行されるプログラムであって、実質的に前記緊急車両誘導装置の発明と同一の発明に係るプログラムである(請求項10)。
また、本発明の緊急車両誘導方法は、実質的に前記緊急車両誘導装置の発明と同一の発明に係る方法である(請求項11)。
【発明の効果】
【0013】
以上のように本発明によれば、緊急車両通過が最短で目的地に到達できる経路を提供するとともに、直近の交通信号機の制御だけでなく、緊急車両の走行する経路上の全ての交差点の交通信号機の制御を行うことにより、緊急車両がその経路をスムーズに走行できるように信号パラメータを調整することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施の形態を、添付図面を参照しながら詳細に説明する。
図1は、本発明の緊急車両誘導装置を含む緊急車両誘導システムの全体構成を示す図である。
緊急車両誘導システムは、交通管制センタ5と、緊急車両の車載装置3とを含み、プローブ車両に搭載された車載装置1を利用するものである。この交通管制センタ5が本発明の緊急車両誘導装置の機能を果たす。「プローブ車両」とは、交通管制センタ5との通信により、車両の走行軌跡、速度などの情報をアップリンクすることができる車両をいう。
【0015】
プローブ車両の車載装置1は、車両識別のためのコードを持ち、このコードを用いて交通管制センタ5と通信することができる。車載装置1は、当該車両の時刻ごとの位置、速度等の情報(走行情報という)を生成し送信する。
緊急車両の車載装置3は、目的地情報(経路計算条件を含む)を設定し、設定された目的地情報を交通管制センタ5に送信する。交通管制センタ5は、交通信号機6の制御装置4と通信回線で接続されていて、制御装置4に対し、信号パラメータに基づく制御情報を送信する。制御装置4は受信した制御情報に基づいて交通信号機6の信号を制御する。
【0016】
車載装置1,3と交通管制センタ5との間の通信を行う通信機11,31には、携帯電話機などの広域通信方式を用いることができる。また、路上通信機を介することを前提にするならば、車載装置1,3と路上通信機との間で、光ビーコン、無線LAN、DSRC(Dedicated Short Range Communication)等の、比較的エリアの狭い通信方式を用いることもでき、この場合、路上通信機と交通管制センタ5との間は、専用通信回線で接続することになる。前記路上通信機の設置場所は、車両と通信できる場所であれば任意であり、例えば、交通信号機6の設置場所と同一または交通信号機6の近くであってもよい。
【0017】
図2は、車載装置1の内部構成を示すブロック図である。車載装置1は、交通管制センタ5との間で路車間通信を行う通信機11、人工衛星の電波を利用して時刻ごとの車両位置検出を行うGPS受信機13、車両の速度パルスに基づいて車両の速度データを得る車速センサ15、車両の方位データを得る方位センサ17、前記GPS受信機13、車速センサ15及び方位センサ17等から得られる各種データに基づいて車両の時刻ごとの位置、速度などの走行情報を算出し通信機11に供給するための演算装置19、ドライバに案内情報(緊急車両の接近情報など)を伝えるスピーカ23、表示装置25、並びに算出された位置、時刻のデータを一時的に記憶するメモリ21を備えている。
【0018】
図3は、緊急車両の車載装置3の内部構成を示すブロック図である。車載装置3は、交通管制センタ5との間で路車間通信を行う通信機31、人工衛星の電波を利用して時刻ごとの車両位置検出を行うGPS受信機33、車両の速度パルスに基づいて車両の速度データを得る車速センサ35、車両の方位データを得る方位センサ37、前記GPS受信機33、車速センサ35及び方位センサ37等から得られる各種データに基づいて車両の時刻ごとの位置などの走行情報を算出するとともに、目的地を設定し、前記走行情報、目的地情報を通信機31に供給するナビゲーション装置39、緊急車両のドライバに案内情報を伝えるスピーカ43、地図を表示して車両の現在地、目的地までの経路などを緊急車両のドライバに指示するための表示装置45、表示装置45に付属するタッチキー47、並びに道路地図データを格納している道路地図データ41を備えている。
【0019】
前記ナビゲーション装置39は、設定した目的地情報及び車両の現在時刻の位置(現在地)に基づいて目的地に到達するための最短時間経路又は最短距離経路(以下「最適経路」という)を、交通管制センタ5から通信機31を通して受信することができる。なお、前記ナビゲーション装置39は、最適経路を、通信機31を通して交通管制センタ5から受信することとともに、あるいは受信することに代えて、自ら最適経路を算出する機能を有していてもよい。
【0020】
図4は、交通管制センタ5の内部構成を示すブロック図である。交通管制センタ5は、プローブ車両の車載装置1から走行情報を含む通信信号を受信し、緊急車両の車載装置3から走行情報、目的地情報を含む通信信号を受信するための送受信機51、通信信号の中から目的地情報・走行情報などを抽出するデータ抽出部53、信号パラメータ算出部55、道路マッチング処理に用いるための道路地図データ57、算出された信号パラメータを交通信号機6の制御装置4に送信するため制御情報を作成する送信制御部59を備えている。
【0021】
以下、信号パラメータ算出部55が実行する処理を、フローチャート(図5)を用いて詳説する。この信号パラメータ算出部55の機能の全部又は一部は、CD−ROMやハードディスクなど所定の媒体に記録されたプログラムを、交通管制センタ5のコンピュータが実行することにより実現される。
まず、信号パラメータ算出部55は、プローブ車両の車載装置1から走行情報(プローブ情報という)を取得する(ステップS1)。そしてこれらの取得したプローブ情報に基づいて、各プローブ車両について道路マッチング処理(プローブ車両の軌跡を地図上の道路区間に沿わせるための処理)を行い、交差点ごとの渋滞情報を作成する(ステップS2)。
【0022】
この渋滞情報作成処理は、プローブ情報に基づいて信号待ち停車末尾位置を検出する処理である。図6、図7を用いて詳しく説明する。
(a)1回の信号サイクル時間で取得したプローブ情報が1件の場合
例えばプローブ情報から得られる、車両の速度と、交差点からの距離との関係が、図6のように、交差点の手前50mの位置で車両が停止しているものとする。
【0023】
この場合、信号パラメータの情報とプローブ情報から、プローブ車両の停車時間と赤信号時間との関係を求める。赤信号時間が60秒、車両の停止開始時刻が赤信号点灯開始から30秒経過後とすると、赤信号の点灯から30秒間で50mまで信号待ち停車末尾位置が延びたことになり、1回の赤信号の最終的な信号待ち停車末尾位置は100m(=50m×(60秒÷30秒))と予測できる。車の平均車長と平均車間距離との和を5mとすると、信号待ち車両台数は20台と推測できる。
【0024】
一般に、信号待ち停車末尾位置Lは、次の(1)式を用いて推定される。
L=LS×(TR÷TΔR) (1)
ここで、LS:車両停止時の交差点からの距離、TR:赤信号の時間、TΔR:車両停止時の赤信号経過時間である。
(b)1回の信号サイクルで取得したプローブ情報が2件以上ある場合
1回の信号サイクルの間に、図7(a),(b)に示すようにプローブ情報が2件受信された場合、それらのプローブ車両をC1,C2で表す。プローブ車両C1,C2の車両停止時刻と、車両停止位置(交差点からの距離)情報から信号待ち停車末尾位置を検知する。
【0025】
例えば赤信号の時間が60秒、プローブ車両C1の停止開始時刻が赤信号点灯から30秒経過後、プローブ車両C2の停止開始時刻が赤信号点灯から40秒経過後とすると、直近の10秒間で25m渋滞末尾が延びたことになり、最終的な信号待ち停車末尾位置は、125m(=75m+25m×(60−40)÷(40−30))と予測できる。
一般に、信号待ち停車末尾位置Lは、次の(2)式で推定される。
【0026】
L=LS2+[(LS2−LS1)×(TR−TΔR2)÷(TΔR2−TΔR1)](2)
ここで、LS1、LS2:車両停止時の交差点からの距離、TR:赤信号の時間、TΔR1、TΔR2:各車両停止時の赤信号経過時間である。
ただし、プローブ車両C1とプローブ車両C2の停止開始時の赤信号経過時間の差(TΔR2−TΔR1)が所定値(例えば、10秒)以下の場合は、プローブ車両C2の情報だけで信号待ち停車末尾位置の算出を行うことが好ましい。この理由は、赤信号経過時間の差(TΔR2−TΔR1)が小さい値のときは、それを分母として計算したとき、誤差が大きくなるからである。
【0027】
なお1回の信号サイクルで、プローブ情報が3件以上ある場合は、当該サイクル内での最後の情報と1つ前の情報(赤信号経過時間の差が所定値(例えば、10秒)以下の場合は、所定値以上になるまで、前の情報に遡る)から算出してもよい。なお1回の信号サイクルで、プローブ情報が2件以上ある場合も、最後の1件の情報だけで信号待ち停車末尾位置を算出してもよい。
【0028】
次に、緊急車両の車載装置3から、現在地、目的地情報を受信しているかどうか参照する(図5;ステップS3)。現在地、目的地情報を受信していれば、現在地、目的地、道路の旅行時間情報に基づいて目的地に到達するための最適経路を算出する(ステップS4)。なお、道路の旅行時間情報は、交通管制センタ5が外部機関から取得している情報である。
【0029】
この最適経路算出処理の概要を説明すると、目的地に至る各経路を構成する通過道路区間の旅行時間を加算していって、最終的に最短で目的地に到達できる経路を特定し、その経路を構成する道路区間を決定する処理である。
最適経路が算出できれば、その最適経路の情報を緊急車両に通知する(ステップS5)。
【0030】
なお、緊急車両のナビゲーション装置39が最適経路を算出する機能を有している場合、緊急車両側で最適経路を算出してもよい。この場合、逆に、緊急車両が、その最適経路の情報を交通管制センタ5に通知することになる。
そして、最適経路の情報を把握した交通管制センタ5は、その緊急車両が現在地から目的地まで通過する経路上の交差点情報を抽出する(ステップS6)。
【0031】
図8は、道路地図とその地図上にある交差点(a)〜(j)を示す図である。緊急車両E1を車のアイコンで、目的地D1を星印で表している。東西南北の方位は、図8に示すとおり、図の上側を北とする。
緊急車両E1の現在地、目的地情報より、交差点(a)→(b)→(c)→(d)→(i)→(j)の順に通過する最適経路Pが算出されたものとする。最適経路Pに沿った各交差点(a),(b),(c),(d),(i),(j)について、各交差点への緊急車両E1の到達時刻を計算し、各交差点への進入道路の信号待ち停車末尾位置を求め、信号待ち車両台数を算出する(ステップS8)。
【0032】
各交差点への現在時刻からの到達時間、交差点への進入道路の信号待ち車両台数が以下の表1のとおりであるとする。
【0033】
【表1】
【0034】
信号パラメータ算出部55は、前記結果をもとに信号パラメータの算出を行い(ステップS9)、各交通信号機の制御装置4にその信号パラメータに基づく制御情報を通知する(ステップS11)。
以上の処理を各交差点について行う(ステップS7→S10)。
ここで信号パラメータの算出について説明する。モデルを簡単にするため、全ての交差点のサイクル時間を2分に固定し、その中の青信号の時間TB (秒)の調整を行う。青時間TBを、次の式で求めるものとする。
【0035】
TB=60×(2N÷NS)×a (3)
ここで、N:交差点の信号待ち車両台数、NS:交差点に進入する車両が当該交差点を通過できる単位時間(分)あたりの台数(交通容量という。飽和交通流率ともいう。)である。(3)式ではNS=30台/分と固定する。
前記(3)式で、2Nとする理由は、Nは赤信号の間に発生する信号車両待ち車両台数であり、青信号の間にも同等の数の車両が到達すると考えて2倍しているからである。NSで割っているのは、NSが1分間で交差点を通過できる台数であるので、2Nの台数が通過するのに何分必要かを求めるためである。60をかけているのは、(2N/NS)の単位が分であるので、秒単位にするためである。また、前記(3)式で、信号待ち車両台数は、あくまで推定値となるため、ある程度余裕をみて青信号時間を長くするために係数a(a>1)を掛けている。
【0036】
この(3)式を用いて計算した青信号時間TBを、交通信号機の制御に適用することにより、交差点で信号待ち停車している車両が青信号ですべて発進して交差点からなくなるようになる。
青信号時間TBの計算例は、表2のとおりとなる。
【0037】
【表2】
【0038】
この表2によれば、緊急車両E1が当該交差点に到達する時間が1分以内の場合、交差点の進入方向の信号は、車両が通過するまで青にする。1分以上5分未満の場合、a=2として青信号時間TBを計算する。ただし、TB<60ならTB=60、TB>100ならTB=100とする。このように、TBに上限を設けるのは、1サイクル時間に占める青時間を長くしすぎると、交差する(他のフェーズの)道路の交通量が減少してしまい渋滞を招くからである。この例では、1サイクル時間を2分(120秒)と仮定しているので、青信号時間の上限を100秒として、赤(黄・全赤を含む)の時間も最低20秒確保している。また、交通量が少なく青時間を60秒以下にできる場合も、緊急車両E1が通過するので、最低半分の時間を青信号にしておくために、最低60秒としている。
【0039】
到達時間が5分以上10分未満の場合、a=1.5とする。10分以上の場合、a=1.2とする。このように、係数aの値を減少させているのは、あまり早く(到達するかなり前から)青信号を長くすると、交差する道路の渋滞が発生しやすいため、救急車の到達がまだ先の場合は、余裕分を少なくし、青の時間があまり長くなりすぎないようにするためである。
【0040】
以上の(3)式を用いた算出方法により、各交差点の進入道路の青信号の時間を計算すると表3のとおりとなる。
【0041】
【表3】
【0042】
なお、前記(3)式において、係数aを、緊急車両の到達時刻によらず固定値(例えばa=1.5)としてもよい。
また、青信号時間も信号待ち車両台数によらず固定値(例えば、90秒)としてもよく、通常の青信号の時間である60秒に対して定数倍(例えば、1.5倍)としてもよい。また、交差点(b)以降についても、緊急車両E1の到達予定時刻の1分前から進入道路の信号を青信号にすることが好ましい。
【0043】
いままでの説明では、車両が交差点を通過できる単位時間(分)あたりの台数(交通容量)NSを固定値としたが、実際、青信号で単位時間あたりに交差点を通過できる車両の台数は、交差点の形状や駐車台数や工事等により変化する。例えば、一車線の道路の場合、左折方向の歩行者数が多い場合や、右折専用レーンがない場合、交通容量が小さくなる。複数車線の道路の場合、駐車や工事により車線規制されている場合は交通容量が小さくなる。このように各交差点の道路事情に応じて通過可能台数は異なる。そこで、各交差点の進入道路の交通容量も考慮した青信号時間の算出を行う。
【0044】
図9は、プローブ情報から得られる、速度と交差点からの距離との関係を示す。プローブ車両は、図示のように、交差点の渋滞のため同一交差点の2回続く赤信号で停車しているものとする。一回目の停車位置は、交差点から60m、二回目の停車位置は、交差点から20mであるとする。この場合、1回の青信号の時間内で車両が進んだ距離は、40mである。平均車長と平均車間距離との和を5mとすると、当該車線を青信号で通過できた台数は8台であることがわかり、交通容量を推定できる。
【0045】
信号待ちによる2回停車が発生していない場合は、1回の信号待ち停車後に車両が進む距離の最大値を交通容量とすればよい。ただし、最大値が標準的な交通容量とされている30台/分より小さくなる場合は、交通容量を標準値の30台/分としてもよい。
各交差点への現在時刻からの到達時間、進入道路の信号待ち車両台数、交通容量NYが表4のようになる場合を考える。
【0046】
【表4】
【0047】
青時間TBは次の式で表すものとする。
TB=60×(2N÷NY)×a (4)
ここで、N:信号待ち車両台数、NY:交差点に進入する車両が交差点を通過できる単位時間(分)あたりの台数(交通容量)である。今回はNYを固定しないものとする。
前記(4)式は、交差点への現在時刻からの到達時間に応じて次の表5のようになる。
【0048】
【表5】
【0049】
前記(4)式を用いて青信号時間TBを計算した結果は以下の表6のようになる。
【0050】
【表6】
【0051】
表6において、交差点(b),(j)の青信号時間が表3と比べて長くなっているが、これは交差点(b),(j)への進入道路の交通容量NYが小さいためである。また交差点(i)の青信号時間が表3と比べて短くなっているが、これは交差点(i)の進入道路の交通容量NYが大きいためである。
次に、複数の緊急車両が同一交差点をある所定時間内(例えば、10分以内)に続けて通過する予定の場合、緊急車両の優先度に応じて信号パラメータの制御を行う例を説明する。
【0052】
図10は、道路地図とその地図上にある交差点(a)〜(j)を示す図であり、2台の緊急車両E1,E2が描かれている。緊急車両E1は救急車のアイコン、緊急車両E2は消防車のアイコンで表している。各緊急車両E1の目的地をそれぞれD1,D2で表す。緊急車両E1は、交差点(a)→(b)→(c)→(d)→(i)→(j)の順に通過し、緊急車両E2は、交差点(c)→(h)の順に通過するものとする。緊急車両E1,E2は、同一交差点(c)を続けて通過する予定である。
【0053】
図10の場合において、緊急車両E1,E2がそれぞれ通過する予定の交差点(c)の青信号時間の設定は、次のように行う。
交差点(c)について、交通信号機の2分のサイクル時間に対し、以上に説明した(3)式又は(4)式で求められた、緊急車両E1が西から東へ進む道路に適用される青時間は100秒であったとする。また、緊急車両E1のことをまったく考慮せずに、緊急車両E2が南から北へ進む道路に適用される青時間は80秒であったとする。
【0054】
ここで緊急車両E1,E2の優先度を設定する。優先度は、緊急車両E2が緊急車両E1よりも高いものとし、交差点(c)では南から北方向の青信号時間を優先して、南→北:80秒、西→東:40秒(=120−80)の設定を行う。
緊急車両E2が交差点(c)を通過した時点で、交差点(c)の信号パラメータを緊急車両E1優先の設定に変更する。その結果、西→東:100秒、南→北:20秒となる。
【0055】
また、優先度の高い緊急車両E2の到達が緊急車両E1の到達から所定時間以上(例えば、2分以上)遅れるのであれば、まず優先度よりも、先に通過する緊急車両E1の青信号時間を優先にして、緊急車両E2が交差点(c)を通過した時点で、交差点(c)の信号パラメータを緊急車両E1優先の設定に変更してもよい。
今までの説明では、交差点に進入する道路に複数の車線があっても、特に車線を意識せずに、1本の道路として処理していたが、高精度位置認識技術が確立し、高精度地図データベースが整備されることを前提とすれば、走行車線の認識が十分に可能となる。
【0056】
このときは、プローブ情報から走行車線の認識を行うことができるので、車線ごとの信号待ち停車末尾位置、及び交通容量を算出することができる。
例えば、図8の交差点(d)に進入する道路が、図11に示されるように、3本の車線を持っているものとする。左車線Aは直進・左折用、中央車線Bは直進用、右車線Cは右折用の車線であるとする。
【0057】
各車線の信号待ち車両台数が、それぞれ、車線A:10台、車線B:10台、車線C:5台であり、交通容量(台/分)が、それぞれ、車線A:20台、車線B:30台、車線C:30台とする。
交差点(d)を左折通過する車線Aのプローブ情報をもとに信号情報を制御する場合、(4)式に従って青信号時間を計算すると、100秒と算出される。車線Bの情報をもとに信号情報を制御した場合、(4)式に従って青信号時間を計算すると、交通容量の違いに応じて80秒と算出される。
【0058】
このように、車線ごとに最適な青信号時間を算出することができるので、緊急車両が当該交差点を左折する場合100秒を適用し、直進する場合80秒を適用すれば、さらに交通の実態に即した緊急車両の信号誘導システムを構築することができる。
また、走行車線の認識が行えない場合は、緊急車両が左折することが予定されている場合、プローブ情報から当該交差点で左折した車両を認識し、そのプローブ情報から左折車線の信号待ち停車末尾位置や交通容量を算出し、信号パラメータを算出してもよい。
【0059】
交通管制センタ5は、緊急車両の接近情報を、緊急車両の周辺を走行する各プローブ車両に通知することとしてもよい。通知を受けた各車両の車載システムは、スピーカ23を通して音声にて、あるいは、表示装置25を通して画面表示にて、緊急車両の接近情報をドライバに通知することができる。このようにドライバに緊急車両の接近情報を通知することで、ドライバに安心感を与えることができる。
【0060】
また、交通管制センタ5は、緊急車両の接近情報を、道路の情報掲示装置に通知し、緊急車両の接近を道路情報掲示板で表示するようにしてもよい。道路情報掲示板の表示により、道路を走行する全車両に対して緊急車両の接近を通知することができる。交通管制センタ5と通信できない車両も存在することを考慮すると、道路情報掲示板は、有効な通知手段になる。
【0061】
以上で、本発明の実施の形態を説明したが、本発明の実施は、前記の形態に限定されるものではない。例えば、以上に説明した緊急車両誘導装置において、交通管制センタ5は、緊急車両が目的地に向けて走行を始める前に最適経路計算、信号パラメータの算出を行っていたが、緊急車両が走行を始めた後も、定期的(例えば、2分ごと)に通過予定交差点の渋滞状況(信号待ち停車末尾位置)の確認を行い、信号待ち停車末尾位置が変更している交差点については、青信号時間の再計算を行い、信号パラメータの再計算を行うことが好ましい。信号待ち停車末尾位置は、時々刻々変わっていくことが多いので、緊急車両をスムーズに通過させるための信号パラメータを、常に最適なものに更新することができる。
【0062】
また、交通管制センタ5はプローブ車両から受信した走行情報に基づいて各交差点の渋滞状況の把握を行っていたが、交通管制センタ5が外部機関から各道路の渋滞長の情報を取得できるのであれば、その取得した情報を活用してもよい。また、各交差点付近に設置された車両検知器からの検知情報に基づいて、信号待ち停車末尾位置を推定しても良い。
【図面の簡単な説明】
【0063】
【図1】本発明の緊急車両誘導装置を含む緊急車両誘導システムの全体構成を示す図である。
【図2】車載装置1の内部構成を示すブロック図である。
【図3】緊急車両の車載装置3の内部構成を示すブロック図である。
【図4】交通管制センタ5の内部構成を示すブロック図である。
【図5】信号パラメータ算出部55の処理をフローチャートである。
【図6】プローブ情報から得られる、速度と交差点からの距離との関係を示すグラフである。
【図7】2台のプローブ情報から得られる、速度と交差点からの距離との各関係を示すグラフである。
【図8】道路地図とその地図上にある交差点(a)〜(j)を示す図である。
【図9】プローブ情報から得られる、速度と交差点からの距離との関係を示すグラフである。
【図10】道路地図とその地図上にある交差点(a)〜(j)を示す図であり、2台の緊急車両E1,E2が描かれている。
【図11】交差点に進入する3本の斜線を持っている道路を示す地図である。
【符号の説明】
【0064】
1 プローブ車両の車載装置
3 緊急車両の車載装置
4 信号機の制御装置
5 交通管制センタ
6 交通信号機
11,31 通信機
13,33 GPS受信機
15,35 車速センサ
17,37 方位センサ
19 演算装置
39 ナビゲーション装置
41 道路地図データ
51 送受信機
53 データ抽出部
55 信号パラメータ算出部
57 道路地図データ
59 送信制御部
(a)〜(j) 交差点
【特許請求の範囲】
【請求項1】
緊急車両の現在地情報と目的地情報に基づいて目的地までの経路を取得する経路取得手段と、
前記経路に沿った交差点に存在する交通信号機の信号パラメータを算出する信号パラメータ算出手段と、
算出された信号パラメータに基づく制御情報を交通信号機に通知する制御情報通知手段とを備え、
前記信号パラメータ算出手段は、前記経路上の渋滞状況を把握して、渋滞状況に応じて、前記緊急車両が当該経路に沿った交差点を通過する時点で、渋滞が解消するように前記交通信号機の信号パラメータを算出するものであることを特徴とする緊急車両誘導装置。
【請求項2】
車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するプローブ情報収集手段を備え、前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点の信号待ち停車末尾位置を推定し、この推定された信号待ち停車末尾位置を用いて信号待ち車両台数を求めることにより、信号待ち停車している車両が青信号で通過できる青信号時間を設定する請求項1記載の緊急車両誘導装置。
【請求項3】
前記信号パラメータ算出手段は、当該車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該車両停止時の赤信号経過時間とに基づき、交差点の信号待ち停車末尾位置を推定する請求項2記載の緊急車両誘導装置。
【請求項4】
前記信号パラメータ算出手段は、プローブ情報を収集した車両が2台である場合に、当該各車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該各車両停止時の赤信号経過時間とに基づき、交差点の信号待ち停車末尾位置を推定する請求項2記載の緊急車両誘導装置。
【請求項5】
車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するプローブ情報収集手段を備え、前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点の信号待ち停車末尾位置を推定し、この推定された信号待ち停車末尾位置を用いて信号待ち車両台数を求め、この信号待ち車両台数と当該交差点における前記経路に沿った道路の交通容量とに基づいて、信号待ち停車している車両が青信号で通過できる青信号時間を設定する請求項1記載の緊急車両誘導装置。
【請求項6】
前記信号パラメータ算出手段は、プローブ情報を収集した同一の車両が、同一交差点で、2回続いた赤信号でそれぞれ停車した場合に、当該車両の各停止時の交差点からの距離と、当該交差点の青信号の時間とに基づき、前記経路に沿った道路の交通容量を求める請求項5記載の緊急車両誘導装置。
【請求項7】
前記信号パラメータ算出手段は、同一交差点を複数の緊急車両が通過する場合は、各緊急車両から受信した緊急度情報から緊急車両の優先度付けを行い、信号パラメータの算出を行う請求項1から請求項6までのいずれか1項記載の緊急車両誘導装置。
【請求項8】
前記信号パラメータ算出手段は、各交差点の渋滞状況の把握を車線ごとに行い、車線単位の渋滞状況を考慮した信号パラメータの算出を行う請求項1から請求項7までのいずれか1項記載の緊急車両誘導装置。
【請求項9】
前記信号パラメータ算出手段は、制御情報を通知後も緊急車両が通過予定の交差点の渋滞状況を確認し、緊急車両の通過予定の経路の渋滞が解消されていない場合は、再度、信号パラメータを算出する請求項1から請求項8までのいずれか1項記載の緊急車両誘導装置。
【請求項10】
コンピュータに格納されることによって実行される緊急車両誘導プログラムであって、
緊急車両の現在地情報と目的地情報に基づいて目的地までの経路を取得するステップと、
前記経路に沿った交差点に存在する交通信号機の信号パラメータを算出するステップと、
算出された信号パラメータに基づく制御情報を交通信号機に通知するステップとを備え、
前記信号パラメータを算出するステップは、前記経路上の渋滞状況を把握して、渋滞状況に応じて、前記緊急車両が当該経路に沿った交差点を通過する時点で、渋滞が解消するように前記交通信号機の信号パラメータを算出するものであることを特徴とするプログラム。
【請求項11】
緊急車両の現在地情報と目的地情報に基づいて目的地までの経路を取得する工程と、
前記経路に沿った交差点に存在する交通信号機の信号パラメータを算出する工程と、
算出された信号パラメータに基づく制御情報を交通信号機に通知する工程とを備え、
前記信号パラメータを算出する工程において、前記経路上の渋滞状況を把握して、渋滞状況に応じて、前記緊急車両が当該経路に沿った交差点を通過する時点で、渋滞が解消するように前記交通信号機の信号パラメータを算出することを特徴とする緊急車両誘導方法。
【請求項1】
緊急車両の現在地情報と目的地情報に基づいて目的地までの経路を取得する経路取得手段と、
前記経路に沿った交差点に存在する交通信号機の信号パラメータを算出する信号パラメータ算出手段と、
算出された信号パラメータに基づく制御情報を交通信号機に通知する制御情報通知手段とを備え、
前記信号パラメータ算出手段は、前記経路上の渋滞状況を把握して、渋滞状況に応じて、前記緊急車両が当該経路に沿った交差点を通過する時点で、渋滞が解消するように前記交通信号機の信号パラメータを算出するものであることを特徴とする緊急車両誘導装置。
【請求項2】
車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するプローブ情報収集手段を備え、前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点の信号待ち停車末尾位置を推定し、この推定された信号待ち停車末尾位置を用いて信号待ち車両台数を求めることにより、信号待ち停車している車両が青信号で通過できる青信号時間を設定する請求項1記載の緊急車両誘導装置。
【請求項3】
前記信号パラメータ算出手段は、当該車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該車両停止時の赤信号経過時間とに基づき、交差点の信号待ち停車末尾位置を推定する請求項2記載の緊急車両誘導装置。
【請求項4】
前記信号パラメータ算出手段は、プローブ情報を収集した車両が2台である場合に、当該各車両停止時の交差点からの距離と、当該交差点の赤信号の時間と、当該各車両停止時の赤信号経過時間とに基づき、交差点の信号待ち停車末尾位置を推定する請求項2記載の緊急車両誘導装置。
【請求項5】
車両が走行した時刻ごとの位置の情報を含むプローブ情報を収集するプローブ情報収集手段を備え、前記信号パラメータ算出手段は、前記プローブ情報収集手段により収集されたプローブ情報に基づき、交差点の信号待ち停車末尾位置を推定し、この推定された信号待ち停車末尾位置を用いて信号待ち車両台数を求め、この信号待ち車両台数と当該交差点における前記経路に沿った道路の交通容量とに基づいて、信号待ち停車している車両が青信号で通過できる青信号時間を設定する請求項1記載の緊急車両誘導装置。
【請求項6】
前記信号パラメータ算出手段は、プローブ情報を収集した同一の車両が、同一交差点で、2回続いた赤信号でそれぞれ停車した場合に、当該車両の各停止時の交差点からの距離と、当該交差点の青信号の時間とに基づき、前記経路に沿った道路の交通容量を求める請求項5記載の緊急車両誘導装置。
【請求項7】
前記信号パラメータ算出手段は、同一交差点を複数の緊急車両が通過する場合は、各緊急車両から受信した緊急度情報から緊急車両の優先度付けを行い、信号パラメータの算出を行う請求項1から請求項6までのいずれか1項記載の緊急車両誘導装置。
【請求項8】
前記信号パラメータ算出手段は、各交差点の渋滞状況の把握を車線ごとに行い、車線単位の渋滞状況を考慮した信号パラメータの算出を行う請求項1から請求項7までのいずれか1項記載の緊急車両誘導装置。
【請求項9】
前記信号パラメータ算出手段は、制御情報を通知後も緊急車両が通過予定の交差点の渋滞状況を確認し、緊急車両の通過予定の経路の渋滞が解消されていない場合は、再度、信号パラメータを算出する請求項1から請求項8までのいずれか1項記載の緊急車両誘導装置。
【請求項10】
コンピュータに格納されることによって実行される緊急車両誘導プログラムであって、
緊急車両の現在地情報と目的地情報に基づいて目的地までの経路を取得するステップと、
前記経路に沿った交差点に存在する交通信号機の信号パラメータを算出するステップと、
算出された信号パラメータに基づく制御情報を交通信号機に通知するステップとを備え、
前記信号パラメータを算出するステップは、前記経路上の渋滞状況を把握して、渋滞状況に応じて、前記緊急車両が当該経路に沿った交差点を通過する時点で、渋滞が解消するように前記交通信号機の信号パラメータを算出するものであることを特徴とするプログラム。
【請求項11】
緊急車両の現在地情報と目的地情報に基づいて目的地までの経路を取得する工程と、
前記経路に沿った交差点に存在する交通信号機の信号パラメータを算出する工程と、
算出された信号パラメータに基づく制御情報を交通信号機に通知する工程とを備え、
前記信号パラメータを算出する工程において、前記経路上の渋滞状況を把握して、渋滞状況に応じて、前記緊急車両が当該経路に沿った交差点を通過する時点で、渋滞が解消するように前記交通信号機の信号パラメータを算出することを特徴とする緊急車両誘導方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−146137(P2009−146137A)
【公開日】平成21年7月2日(2009.7.2)
【国際特許分類】
【出願番号】特願2007−322285(P2007−322285)
【出願日】平成19年12月13日(2007.12.13)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
【公開日】平成21年7月2日(2009.7.2)
【国際特許分類】
【出願日】平成19年12月13日(2007.12.13)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
[ Back to top ]