
線条体の引出方法及び給糸装置
【課題】巻装された糸、紐、ロープ、ワイヤ、テープなどの線条体を接線方法に引出す手段に関し、簡単な構造及び制御で引出される線条体の張力を所定値以下ないし略一定値に維持する技術手段を得る。
【解決手段】可変速モータ9で回転駆動される被駆動軸7に引出される糸その他の線条体を巻装した給糸体1を自由回転可能に軸支し、引出される線条体の張力が設定値を越えないように、又は設定値を維持するように可変速モータ9の回転数を制御する。給糸体1は、被駆動軸7に自由回転可能に支持されている。従って、給糸体1の回転速度は、被駆動軸7の回転速度とは無関係に、線条体2の引出速度により規定される。被駆動軸7の回転により、被駆動軸7とこれに自由回転可能に軸支されている給糸体1との回転数差が小さくなり、給糸体1の回転負荷が低減され、引出される線条体2の張力の増大が防止される。
【解決手段】可変速モータ9で回転駆動される被駆動軸7に引出される糸その他の線条体を巻装した給糸体1を自由回転可能に軸支し、引出される線条体の張力が設定値を越えないように、又は設定値を維持するように可変速モータ9の回転数を制御する。給糸体1は、被駆動軸7に自由回転可能に支持されている。従って、給糸体1の回転速度は、被駆動軸7の回転速度とは無関係に、線条体2の引出速度により規定される。被駆動軸7の回転により、被駆動軸7とこれに自由回転可能に軸支されている給糸体1との回転数差が小さくなり、給糸体1の回転負荷が低減され、引出される線条体2の張力の増大が防止される。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、巻装された糸、紐、ロープ、ワイヤ、テープなどの線条体を接線方法に引出す方法及び当該引き出しにより線条体を供給する給糸(給紐、給ロープ、給ワイヤ、給テープを含む。以下及び特許請求の範囲において同じ。)装置に関するもので、特に分繊などの糸処理時における糸の引出しないし供給に特に好適な上記方法及び装置に関するものである。
【背景技術】
【0002】
分繊機等で分繊される糸の給糸体からの引き出しは、巻取側から糸に付与される張力で給糸体を回転させつつ糸を接線方向にを引き出すことによって行われている。すなわち、糸を巻装した給糸体を機台に自由回転可能に軸支された支軸に装着し、糸に付与される張力で給糸体を回転させつつ糸を給糸体の接線方向に引出すというものである。
【0003】
糸の引出時に糸から給糸体に付与される回転力は、糸の張力に給糸体の半径を乗じた値となり、一方、給糸体の回転速度は、給糸体の半径の減少に伴って増加する。そのため、糸の引出しが進んで給糸体の半径が小さくなるにつれて、引出される糸に作用する張力が増大し、過大な張力により糸が延伸されて性質が変化したり、糸切れが生じたりする。
【0004】
このような問題が生じないようにするためには、糸の引出し速度を遅くすればよいが、生産性が低下するという問題がある。下記特許文献1には給糸体の周面に駆動ローラを接触させて引出される糸の張力を一定にする分繊糸製造方法が示されている。
【特許文献1】特開平6‐116807号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
巻取側から糸に付与される張力で給糸体を回転させつつ糸を引出す方法では、糸の引出し速度を高速化すると、給糸体の半径が減少したときに、糸が延伸されて性質が変化したり糸切れが生じたりするということが起こる。前記特許文献1で提案された方法によれば、給糸体の半径が小さくなったときも一定張力で糸を引出すことができるが、駆動ローラの周速を糸の引出し速度と正確に一致させる必要があり、駆動ローラの速度制御が難しい。
【0006】
この発明は、簡単な構造及び制御で給糸体から引出される糸その他の線条体の張力を所定値以下ないし略一定値に維持する方法及び当該方法で線条体を供給する給糸装置を得ることを課題としている。
【課題を解決するための手段】
【0007】
この発明は、可変速モータ9で回転駆動される被駆動軸7に引出される糸その他の線条体を巻装した給糸体1をその中心軸回りに自由回転可能に軸支し、引出される線条体の張力が設定値を越えないように、又は設定値を維持するように可変速モータ9の回転数を制御することによって、上記課題を解決している。
【0008】
給糸体1は、被駆動軸7に自由回転可能に支持されている。従って、給糸体1の回転速度は、被駆動軸7の回転速度とは無関係に、線条体2の引出速度により規定される。被駆動軸7の回転は、これに軸支されている給糸体1の自由回転抵抗を軽減する作用をしている。
【0009】
小さな張力で線条体の引出しが可能なときは、可変速モータ9を駆動することなく、被駆動軸7を停止させた状態で線条体を引出すことができる。線条体の引出しが進んで給糸体1の半径が小さくなり、回転速度が上昇して線条体の張力が増大したとき、被駆動軸7を給糸体1の回転方向と同方向に回転させる。これにより、被駆動軸7とこれに自由回転可能に軸支されている給糸体1との回転数差が小さくなり、給糸体1の回転負荷が低減され、引出される線条体2の張力の増大が防止され、線条体2に過大な張力が作用することがない。
【0010】
上記技術思想に基づく本願請求項1の発明に係る線条体の引出方法は、機台5に糸その他の線条体2を巻装した給糸体1を自由回転可能に装着し、引出す線条体2に付与される張力により給糸体1を回転させつつ接線方向に線条体2を引出す方法において、給糸体1を被駆動軸7a、7bに自由回転可能に装着すると共に、前記張力を検出する張力センサ11と、前記被駆動軸を糸引出時における給糸体1の回転方向と同方向に回転させる可変速モータ9とを設け、張力センサ11で張力の増大が検出されたときに前記モータ9を増速することを特徴とするものである。
【0011】
また、上記技術思想に基づく本願請求項2の発明に係る線条体の供給装置は、機台5に自由回転可能に設けた支軸7aと、糸その他の線条体2を巻装した給糸体1を当該支軸で自由回転可能に支持する軸受8と、給糸体1から引出される線条体2の張力を検出する張力センサ11と、支軸7aを線条体2の引出時における給糸体1の回転方向と同方向に駆動する可変速モータ9と、前記センサ11で検出された張力が増大したときに前記モータ9を増速させる制御装置4とを備えていることを特徴とするものである。
【0012】
また本願請求項3の発明に係る線条体の供給装置は、機台5に自由回転可能に設けた基軸7bと、この基軸に同一軸線回りに自由回転可能に支持されて、糸その他の線条体2を巻装した給糸体1を支持する支軸21と、給糸体1から引出される線条体2の張力を検出する張力センサ11と、基軸7bを線条体2の引出時における給糸体1の回転方向と同方向に駆動する可変速モータ9と、前記センサ11で検出された張力が増大したときに前記モータ9を増速させる制御装置4とを備えていることを特徴とするものである。
【発明の効果】
【0013】
この発明では、給糸体1はあくまでも自由回転状態で軸支されて、引出される線条体2の張力のみによって回転駆動されるので、引出し速度と可変速モータ9の速度との同期制御を必要としない。制御遅れや制御誤差があったとしても、引出される線条体2の張力を変動させるだけであり、その変動幅を許容範囲内に抑えることは容易である。また、給糸体1の支持構造も、2段階の自由回転軸受で支持して、その中間の軸に可変速モータ9を連結するだけの構造であり、給糸体1の機械的な支持構造も簡単である。
【0014】
この発明は、分繊機その他の糸処理装置において、一定張力で糸を引出すのに特に有効であるが、糸の引出しに限定されるものではなく、巻装した紐、ロープ、ワイヤ、テープなどの各種の線条体の引出しに利用することができる。すなわちこの発明により、糸その他の線条体を巻装した給糸体から当該線条体をその接線方向に一定張力で引出すための、機械的構造が簡単で制御が容易な給糸装置を提供することができるという効果がある。
【発明を実施するための最良の形態】
【0015】
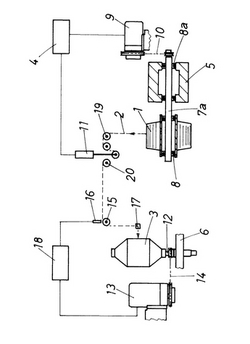
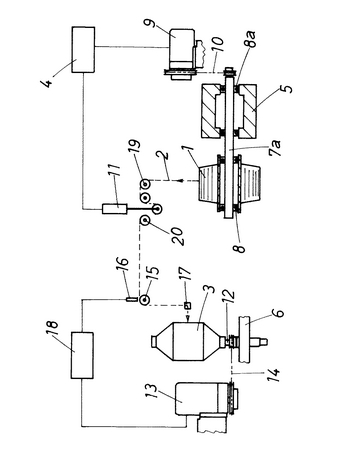
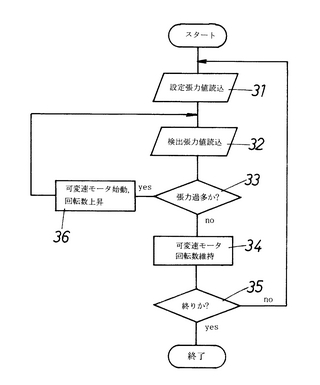
以下、図面を参照してこの発明の実施形態を説明する。図1は、給糸体1から糸2を引出して糸パッケージ3に巻取る装置のハードウェア構成を示したブロック図、図2は、図1の装置における張力制御装置4の制御手順を示すフローチャートである。
【0016】
図1において、5及び6は機台、7aは機台5に自由回転軸受8aで軸支された支軸、1は支軸7aに自由回転軸受8で軸支された給糸体、9は可変速モータ、10は可変速モータ9の回転を支軸7aに伝達するベルト伝動装置、11は給糸体1から接線方向に引出された糸2の張力を検出する張力センサ、4は張力センサ11の検出信号に基づいて可変速モータ9の回転停止及び回転速度を制御する張力制御装置である。
【0017】
12は機台6に植立されたスピンドル軸、3はスピンドル軸12に装着された糸パッケージ、13はスピンドルモータ、14はスピンドルモータ13の回転をスピンドル軸12に伝達するベルト伝動装置、15は糸速検出プーリ、16は糸速センサ、17はトラバーサ、18は巻取速度制御装置である。
【0018】
給糸体1から接線方向に解除された糸2は、プーリ19ないし20で適宜案内され、その途中で張力センサ11により糸2の張力が検出されている。張力センサ11は、張力変動による糸の弛み量を位置センサで検出する一般的な構造のものを図示したが、どのような構造のものであってもよく、糸張力と検出出力が比例関係にならないセンサであってもかまわない。可変速モータ9も特に構造は問わないが、制御速度の精度をそれほど必要としないので、インバータ制御の汎用モータを使用するのが実用的である。
【0019】
給糸体1から引出された糸2は、糸速検出プーリ15及びトラバーサ17を経て糸パッケージ3に巻き取られる。巻取速度は、スピンドルモータ13の回転速度によって制御される。一般的には、糸速センサ16で検出される糸速度が一定となるように、スピンドルモータを制御しており、従って糸パッケージ3の径が大きくなるに従って、スピンドルモータ13の回転数は低減する。
【0020】
張力制御装置4には、予め張力設定値を登録しておく。糸の引出し初期、すなわち給糸体1の径が大きいときは、糸2の張力は設定された張力値より小さく、このときは可変速モータ9は停止している。張力制御装置4は、図2に示す手順で可変速モータ9を制御しており、糸の引出し初期においては、張力の判別ステップ33がNoとなるので、可変速モータ9は、回転数ゼロの当初の停止状態を維持している。
【0021】
糸2の引出しに伴って給糸体1の半径が小さくなるに従って、張力センサ11で検出される張力値が徐々に増大する。図2のステップ31で読み込んだ設定張力値がステップ32で読み込んだ検出張力値より大きいことが判別ステップ33で検出されると、ステップ36で可変速モータ9の回転を開始する。そして、ステップ32で改めて検出張力値を読み込み、検出張力が設定張力値より小さくなるまで、ステップ36から32のループを繰り返して、可変速モータ9の回転を上昇させる。検出張力値が設定張力値より小さくなったときに、判別ステップ33からステップ34へと移動して、可変速モータ9の回転数を維持する。
【0022】
給糸体1の径が更に減少して、検出張力値が設定張力値を超える毎に、ステップ36、ステップ32及び33の繰り返しにより、検出張力値が設定張力値より小さくなるまで可変速モータ9の回転数を上昇させる。この制御を繰り返すことにより、引出される糸2の張力を設定値以下に維持して糸の引出しを行う。所定長の糸の引出しが終了したら、ステップ35を抜けて制御を終了し、可変速モータ9を停止させる。
【0023】
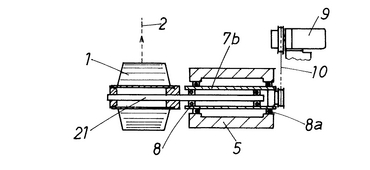
図1に示した例では、給糸体1は支軸7aに軸受8で自由回転可能に軸支されている。この発明の構造では、給糸体1が2段階の自由回転軸受8、8aを介して機台5に装着され、その中間の軸が可変速モータ9で駆動されるようになっていればよく、従って、図3に示すような給糸体支持構造も可能である。
【0024】
図3に示す構造では、機台5に自由回転軸受8aを介して中空軸7bが軸支され、当該中空軸に第2段の自由回転軸受8を介して支軸21が軸支され、給糸体1は当該支軸21に相対回転不能に嵌装されている。そして、可変速モータ9は、ベルト伝動装置10で中空軸7bを回転駆動している。この構造では、支軸21は給糸体1と共に回転するが、当該支軸21は中空軸7bに自由回転自在であり、この支軸21の回転負荷が可変速モータ9による中空軸7bの駆動により軽減されて、図1と同様に引出される糸の張力の増大を防止できる。
【図面の簡単な説明】
【0025】
【図1】この発明の一実施形態を示すブロック図
【図2】張力制御装置の制御手順を示すフローチャート
【図3】給糸体の支持構造の第2例を示すブロック図
【符号の説明】
【0026】
1 給糸体
4 張力制御装置
7 被駆動軸
7a 支軸
7b 中空軸
8 自由回転軸受
9 可変速モータ
11 張力センサ
【技術分野】
【0001】
この発明は、巻装された糸、紐、ロープ、ワイヤ、テープなどの線条体を接線方法に引出す方法及び当該引き出しにより線条体を供給する給糸(給紐、給ロープ、給ワイヤ、給テープを含む。以下及び特許請求の範囲において同じ。)装置に関するもので、特に分繊などの糸処理時における糸の引出しないし供給に特に好適な上記方法及び装置に関するものである。
【背景技術】
【0002】
分繊機等で分繊される糸の給糸体からの引き出しは、巻取側から糸に付与される張力で給糸体を回転させつつ糸を接線方向にを引き出すことによって行われている。すなわち、糸を巻装した給糸体を機台に自由回転可能に軸支された支軸に装着し、糸に付与される張力で給糸体を回転させつつ糸を給糸体の接線方向に引出すというものである。
【0003】
糸の引出時に糸から給糸体に付与される回転力は、糸の張力に給糸体の半径を乗じた値となり、一方、給糸体の回転速度は、給糸体の半径の減少に伴って増加する。そのため、糸の引出しが進んで給糸体の半径が小さくなるにつれて、引出される糸に作用する張力が増大し、過大な張力により糸が延伸されて性質が変化したり、糸切れが生じたりする。
【0004】
このような問題が生じないようにするためには、糸の引出し速度を遅くすればよいが、生産性が低下するという問題がある。下記特許文献1には給糸体の周面に駆動ローラを接触させて引出される糸の張力を一定にする分繊糸製造方法が示されている。
【特許文献1】特開平6‐116807号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
巻取側から糸に付与される張力で給糸体を回転させつつ糸を引出す方法では、糸の引出し速度を高速化すると、給糸体の半径が減少したときに、糸が延伸されて性質が変化したり糸切れが生じたりするということが起こる。前記特許文献1で提案された方法によれば、給糸体の半径が小さくなったときも一定張力で糸を引出すことができるが、駆動ローラの周速を糸の引出し速度と正確に一致させる必要があり、駆動ローラの速度制御が難しい。
【0006】
この発明は、簡単な構造及び制御で給糸体から引出される糸その他の線条体の張力を所定値以下ないし略一定値に維持する方法及び当該方法で線条体を供給する給糸装置を得ることを課題としている。
【課題を解決するための手段】
【0007】
この発明は、可変速モータ9で回転駆動される被駆動軸7に引出される糸その他の線条体を巻装した給糸体1をその中心軸回りに自由回転可能に軸支し、引出される線条体の張力が設定値を越えないように、又は設定値を維持するように可変速モータ9の回転数を制御することによって、上記課題を解決している。
【0008】
給糸体1は、被駆動軸7に自由回転可能に支持されている。従って、給糸体1の回転速度は、被駆動軸7の回転速度とは無関係に、線条体2の引出速度により規定される。被駆動軸7の回転は、これに軸支されている給糸体1の自由回転抵抗を軽減する作用をしている。
【0009】
小さな張力で線条体の引出しが可能なときは、可変速モータ9を駆動することなく、被駆動軸7を停止させた状態で線条体を引出すことができる。線条体の引出しが進んで給糸体1の半径が小さくなり、回転速度が上昇して線条体の張力が増大したとき、被駆動軸7を給糸体1の回転方向と同方向に回転させる。これにより、被駆動軸7とこれに自由回転可能に軸支されている給糸体1との回転数差が小さくなり、給糸体1の回転負荷が低減され、引出される線条体2の張力の増大が防止され、線条体2に過大な張力が作用することがない。
【0010】
上記技術思想に基づく本願請求項1の発明に係る線条体の引出方法は、機台5に糸その他の線条体2を巻装した給糸体1を自由回転可能に装着し、引出す線条体2に付与される張力により給糸体1を回転させつつ接線方向に線条体2を引出す方法において、給糸体1を被駆動軸7a、7bに自由回転可能に装着すると共に、前記張力を検出する張力センサ11と、前記被駆動軸を糸引出時における給糸体1の回転方向と同方向に回転させる可変速モータ9とを設け、張力センサ11で張力の増大が検出されたときに前記モータ9を増速することを特徴とするものである。
【0011】
また、上記技術思想に基づく本願請求項2の発明に係る線条体の供給装置は、機台5に自由回転可能に設けた支軸7aと、糸その他の線条体2を巻装した給糸体1を当該支軸で自由回転可能に支持する軸受8と、給糸体1から引出される線条体2の張力を検出する張力センサ11と、支軸7aを線条体2の引出時における給糸体1の回転方向と同方向に駆動する可変速モータ9と、前記センサ11で検出された張力が増大したときに前記モータ9を増速させる制御装置4とを備えていることを特徴とするものである。
【0012】
また本願請求項3の発明に係る線条体の供給装置は、機台5に自由回転可能に設けた基軸7bと、この基軸に同一軸線回りに自由回転可能に支持されて、糸その他の線条体2を巻装した給糸体1を支持する支軸21と、給糸体1から引出される線条体2の張力を検出する張力センサ11と、基軸7bを線条体2の引出時における給糸体1の回転方向と同方向に駆動する可変速モータ9と、前記センサ11で検出された張力が増大したときに前記モータ9を増速させる制御装置4とを備えていることを特徴とするものである。
【発明の効果】
【0013】
この発明では、給糸体1はあくまでも自由回転状態で軸支されて、引出される線条体2の張力のみによって回転駆動されるので、引出し速度と可変速モータ9の速度との同期制御を必要としない。制御遅れや制御誤差があったとしても、引出される線条体2の張力を変動させるだけであり、その変動幅を許容範囲内に抑えることは容易である。また、給糸体1の支持構造も、2段階の自由回転軸受で支持して、その中間の軸に可変速モータ9を連結するだけの構造であり、給糸体1の機械的な支持構造も簡単である。
【0014】
この発明は、分繊機その他の糸処理装置において、一定張力で糸を引出すのに特に有効であるが、糸の引出しに限定されるものではなく、巻装した紐、ロープ、ワイヤ、テープなどの各種の線条体の引出しに利用することができる。すなわちこの発明により、糸その他の線条体を巻装した給糸体から当該線条体をその接線方向に一定張力で引出すための、機械的構造が簡単で制御が容易な給糸装置を提供することができるという効果がある。
【発明を実施するための最良の形態】
【0015】
以下、図面を参照してこの発明の実施形態を説明する。図1は、給糸体1から糸2を引出して糸パッケージ3に巻取る装置のハードウェア構成を示したブロック図、図2は、図1の装置における張力制御装置4の制御手順を示すフローチャートである。
【0016】
図1において、5及び6は機台、7aは機台5に自由回転軸受8aで軸支された支軸、1は支軸7aに自由回転軸受8で軸支された給糸体、9は可変速モータ、10は可変速モータ9の回転を支軸7aに伝達するベルト伝動装置、11は給糸体1から接線方向に引出された糸2の張力を検出する張力センサ、4は張力センサ11の検出信号に基づいて可変速モータ9の回転停止及び回転速度を制御する張力制御装置である。
【0017】
12は機台6に植立されたスピンドル軸、3はスピンドル軸12に装着された糸パッケージ、13はスピンドルモータ、14はスピンドルモータ13の回転をスピンドル軸12に伝達するベルト伝動装置、15は糸速検出プーリ、16は糸速センサ、17はトラバーサ、18は巻取速度制御装置である。
【0018】
給糸体1から接線方向に解除された糸2は、プーリ19ないし20で適宜案内され、その途中で張力センサ11により糸2の張力が検出されている。張力センサ11は、張力変動による糸の弛み量を位置センサで検出する一般的な構造のものを図示したが、どのような構造のものであってもよく、糸張力と検出出力が比例関係にならないセンサであってもかまわない。可変速モータ9も特に構造は問わないが、制御速度の精度をそれほど必要としないので、インバータ制御の汎用モータを使用するのが実用的である。
【0019】
給糸体1から引出された糸2は、糸速検出プーリ15及びトラバーサ17を経て糸パッケージ3に巻き取られる。巻取速度は、スピンドルモータ13の回転速度によって制御される。一般的には、糸速センサ16で検出される糸速度が一定となるように、スピンドルモータを制御しており、従って糸パッケージ3の径が大きくなるに従って、スピンドルモータ13の回転数は低減する。
【0020】
張力制御装置4には、予め張力設定値を登録しておく。糸の引出し初期、すなわち給糸体1の径が大きいときは、糸2の張力は設定された張力値より小さく、このときは可変速モータ9は停止している。張力制御装置4は、図2に示す手順で可変速モータ9を制御しており、糸の引出し初期においては、張力の判別ステップ33がNoとなるので、可変速モータ9は、回転数ゼロの当初の停止状態を維持している。
【0021】
糸2の引出しに伴って給糸体1の半径が小さくなるに従って、張力センサ11で検出される張力値が徐々に増大する。図2のステップ31で読み込んだ設定張力値がステップ32で読み込んだ検出張力値より大きいことが判別ステップ33で検出されると、ステップ36で可変速モータ9の回転を開始する。そして、ステップ32で改めて検出張力値を読み込み、検出張力が設定張力値より小さくなるまで、ステップ36から32のループを繰り返して、可変速モータ9の回転を上昇させる。検出張力値が設定張力値より小さくなったときに、判別ステップ33からステップ34へと移動して、可変速モータ9の回転数を維持する。
【0022】
給糸体1の径が更に減少して、検出張力値が設定張力値を超える毎に、ステップ36、ステップ32及び33の繰り返しにより、検出張力値が設定張力値より小さくなるまで可変速モータ9の回転数を上昇させる。この制御を繰り返すことにより、引出される糸2の張力を設定値以下に維持して糸の引出しを行う。所定長の糸の引出しが終了したら、ステップ35を抜けて制御を終了し、可変速モータ9を停止させる。
【0023】
図1に示した例では、給糸体1は支軸7aに軸受8で自由回転可能に軸支されている。この発明の構造では、給糸体1が2段階の自由回転軸受8、8aを介して機台5に装着され、その中間の軸が可変速モータ9で駆動されるようになっていればよく、従って、図3に示すような給糸体支持構造も可能である。
【0024】
図3に示す構造では、機台5に自由回転軸受8aを介して中空軸7bが軸支され、当該中空軸に第2段の自由回転軸受8を介して支軸21が軸支され、給糸体1は当該支軸21に相対回転不能に嵌装されている。そして、可変速モータ9は、ベルト伝動装置10で中空軸7bを回転駆動している。この構造では、支軸21は給糸体1と共に回転するが、当該支軸21は中空軸7bに自由回転自在であり、この支軸21の回転負荷が可変速モータ9による中空軸7bの駆動により軽減されて、図1と同様に引出される糸の張力の増大を防止できる。
【図面の簡単な説明】
【0025】
【図1】この発明の一実施形態を示すブロック図
【図2】張力制御装置の制御手順を示すフローチャート
【図3】給糸体の支持構造の第2例を示すブロック図
【符号の説明】
【0026】
1 給糸体
4 張力制御装置
7 被駆動軸
7a 支軸
7b 中空軸
8 自由回転軸受
9 可変速モータ
11 張力センサ
【特許請求の範囲】
【請求項1】
機台に糸その他の線条体を巻装した給糸体を自由回転可能に装着し、引出す線条体に付与される張力により当該給糸体を回転させつつ接線方向に線条体を引出す方法において、
前記給糸体を被駆動軸に自由回転可能に装着すると共に、前記張力を検出する張力センサと、前記被駆動軸を糸引出時における給糸体の回転方向と同方向に回転させる可変速モータとを設け、前記張力センサで張力の増大が検出されたときに前記モータを増速する、線条体の引出方法。
【請求項2】
機台に自由回転可能に設けた支軸と、糸その他の線条体を巻装した給糸体を当該支軸で自由回転可能に支持する軸受と、当該給糸体から引出される線条体の張力を検出する張力センサと、前記支軸を線条体の引出時における給糸体の回転方向と同方向に駆動する可変速モータと、前記センサで検出された張力が増大したときに前記モータを増速させる制御装置とを備えている、線条体の供給装置。
【請求項3】
機台に自由回転可能に設けた基軸と、この基軸に同一軸線回りに自由回転可能に支持されて糸その他の線条体を巻装した給糸体を支持する支軸と、当該給糸体から引出される線条体の張力を検出する張力センサと、前記基軸を線条体の引出時における給糸体の回転方向と同方向に駆動する可変速モータと、前記センサで検出された張力が増大したときに前記モータを増速させる制御装置とを備えている、線条体の供給装置。
【請求項1】
機台に糸その他の線条体を巻装した給糸体を自由回転可能に装着し、引出す線条体に付与される張力により当該給糸体を回転させつつ接線方向に線条体を引出す方法において、
前記給糸体を被駆動軸に自由回転可能に装着すると共に、前記張力を検出する張力センサと、前記被駆動軸を糸引出時における給糸体の回転方向と同方向に回転させる可変速モータとを設け、前記張力センサで張力の増大が検出されたときに前記モータを増速する、線条体の引出方法。
【請求項2】
機台に自由回転可能に設けた支軸と、糸その他の線条体を巻装した給糸体を当該支軸で自由回転可能に支持する軸受と、当該給糸体から引出される線条体の張力を検出する張力センサと、前記支軸を線条体の引出時における給糸体の回転方向と同方向に駆動する可変速モータと、前記センサで検出された張力が増大したときに前記モータを増速させる制御装置とを備えている、線条体の供給装置。
【請求項3】
機台に自由回転可能に設けた基軸と、この基軸に同一軸線回りに自由回転可能に支持されて糸その他の線条体を巻装した給糸体を支持する支軸と、当該給糸体から引出される線条体の張力を検出する張力センサと、前記基軸を線条体の引出時における給糸体の回転方向と同方向に駆動する可変速モータと、前記センサで検出された張力が増大したときに前記モータを増速させる制御装置とを備えている、線条体の供給装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−199460(P2006−199460A)
【公開日】平成18年8月3日(2006.8.3)
【国際特許分類】
【出願番号】特願2005−14145(P2005−14145)
【出願日】平成17年1月21日(2005.1.21)
【出願人】(505026756)
【Fターム(参考)】
【公開日】平成18年8月3日(2006.8.3)
【国際特許分類】
【出願日】平成17年1月21日(2005.1.21)
【出願人】(505026756)
【Fターム(参考)】
[ Back to top ]