
線条体送出装置およびその方法
【課題】小型軽量化した線条体送出装置及びその方法を提供する。
【解決手段】送出モータ7がボビン5を回転駆動することにより、線条体3がボビン5から送出される。線トラバース機構13は、ボールネジ15と、ボールネジ15を正逆両方向に回転駆動するボールネジ駆動モータ17と、ボールネジ15により左右方向へ滑動するスライダ21と、キャリア23を備える。スライダ21に接続されたキャリア23には、ガイドプーリ33,35が軸支されるとともに、位置検出器25が設けられている。ボビン5から送出された線条体3の方向は、ガイドプーリ33,35によりボビン軸方向と平行な方向へ変換される。位置検出器25は、線条体3のボビン軸方向の位置を検出し、制御装置47は、位置検出器25の検出信号によりボールネジ駆動モータ17を駆動し、ダンサプーリ39が目標位置となるように送出モータ7を駆動する。
【解決手段】送出モータ7がボビン5を回転駆動することにより、線条体3がボビン5から送出される。線トラバース機構13は、ボールネジ15と、ボールネジ15を正逆両方向に回転駆動するボールネジ駆動モータ17と、ボールネジ15により左右方向へ滑動するスライダ21と、キャリア23を備える。スライダ21に接続されたキャリア23には、ガイドプーリ33,35が軸支されるとともに、位置検出器25が設けられている。ボビン5から送出された線条体3の方向は、ガイドプーリ33,35によりボビン軸方向と平行な方向へ変換される。位置検出器25は、線条体3のボビン軸方向の位置を検出し、制御装置47は、位置検出器25の検出信号によりボールネジ駆動モータ17を駆動し、ダンサプーリ39が目標位置となるように送出モータ7を駆動する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ボビンに巻かれた線条体を送出する線条体送出装置およびその方法に関する。
【背景技術】
【0002】
従来よりボビンに巻かれた光ファイバ素線等の線条体を張力試験のためのプルーフテスターに送出するために、特許文献1に記載のボビントラバース法が用いられている。このボビントラバース法は、送出モータにより回転駆動されるボビンから線条体を送出する際に、線条体の送出位置に応じてボビンをボビン軸方向に往復移動させることにより、線条体の走行位置を常に一定の行路に保持する方法である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−12370号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記ボビントラバース法では、送出モータとともにボビンをボビン軸方向へ往復移動させるボビントラバース機構が大規模となり、線条体送出装置が大型重量化するという問題点があった。
【0005】
上記問題点を解決するために、本発明の目的は、小型軽量化した線条体送出装置及びその方法を提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために本発明は、ボビンを回転駆動してボビンに巻かれた線条体を送出する送出モータと、前記ボビンから送出された線条体の方向をボビン軸方向と平行な方向へ変換するガイドプーリと、前記ボビンと前記ガイドプーリとの間の位置における前記線条体の前記ボビン軸方向の位置を検出する位置検出手段と、前記ガイドプーリにより方向変換された線条体を基準線速度で送出するキャプスタンと、前記ガイドプーリと前記キャプスタンとの間に上下移動自在に配置され前記線条体が掛け回されたダンサプーリと、前記ガイドプーリ及び前記位置検出手段を前記ボビン軸方向へ往復駆動させる線トラバース機構と、前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度を制御するとともに、前記位置検出手段が検出した線条体の位置が前記線トラバース機構の所定範囲内となるように前記線トラバース機構を制御する制御装置と、を備えたことを要旨とする線条体送出装置である。
【0007】
また本発明に係る線条体送出装置においては、前記位置検出手段は、レーザ光を投光するレーザ投光器と、該レーザ投光器からのレーザ光を反射する反射板と、該反射板で反射されたレーザ光を受光するレーザ受光器と、を備えてなり、前記反射板は、前記レーザ光の周波数帯域内における反射率より該帯域外における反射率を低くしたことを要旨とする。
【0008】
また本発明に係る線条体送出装置においては、前記制御装置は、前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度を比例積分(PI)制御し、前記送出モータの停止状態から増速して定速状態となったときに、PI制御における積分項の値を減少させるとともに比例ゲインを増加させて、前記定速状態を維持することにより、前記線条体の断線時に、前記増加させた比例ゲインを用いて前記送出モータの回転を定速状態から停止させることを要旨とする。
【0009】
また本発明は、ボビンを回転駆動してボビンに巻かれた線条体を送出する送出モータと、前記ボビンから送出された線条体の方向をボビン軸方向と平行な方向へ変換するガイドプーリと、前記ボビンと前記ガイドプーリとの間の位置における前記線条体の前記ボビン軸方向の位置を検出する位置検出手段と、前記ガイドプーリにより方向変換された線条体を基準線速度で送出するキャプスタンと、前記ガイドプーリと前記キャプスタンとの間に上下移動自在に配置され前記線条体が掛け回されたダンサプーリと、前記ガイドプーリ及び前記位置検出手段を前記ボビン軸方向へ往復駆動させる線トラバース機構と、前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度を制御する制御装置と、を備えた線条体送出装置により線条体を送出する線条体送出方法であって、前記制御装置は、前記キャプスタンを停止状態から起動して前記線条体の基準線速度まで増速し、前記キャプスタンの増速に応じて前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度をPI制御し、前記送出モータの回転速度が定速状態となったときに、PI制御における積分項の値を減少させるとともに、比例ゲインを増加させて前記定速状態を維持し、前記線条体の断線が検出されたときに、前記キャプスタンを急速に停止させるとともに、前記増加させた比例ゲインを用いて前記送出モータの回転速度を制御することを要旨とする。
【発明の効果】
【0010】
本発明によれば、ボビントラバース機構がボビン及び送出モータを往復駆動するのではなく、線トラバース機構がガイドプーリと位置検出手段とをボビン軸方向へ往復駆動させるので、線条体送出装置を小型軽量化することができるという効果がある。
【0011】
また本発明によれば、線条体の位置検出のために、レーザ投光器と、反射板と、レーザ受光器とを用い、反射板は、レーザ光の周波数帯域内における反射率より該帯域外における反射率を低くしたことにより、外部光の影響を低減して正確な線条体の位置検出を行うことができるという効果がある。
【0012】
また本発明によれば、制御装置は、ダンサプーリの位置が所定の目標位置となるように送出モータの回転速度をPI制御し、送出モータの停止状態から増速して定速状態となったときに、PI制御における積分項の値を減少させるとともに比例ゲインを増加させて、定速状態を維持することにより、線条体の断線時に、積分項の影響を受けることなく、送出モータの回転速度を安定的に速やかに停止状態へ移行させることができるという効果がある。
【図面の簡単な説明】
【0013】
【図1】本発明に係る線条体送出装置の実施形態を説明するの概略構成図である。
【図2】制御装置の構成を説明する制御ブロック図である。
【図3】送出モータ制御部の詳細を説明する詳細制御ブロック図である。
【発明を実施するための形態】
【0014】
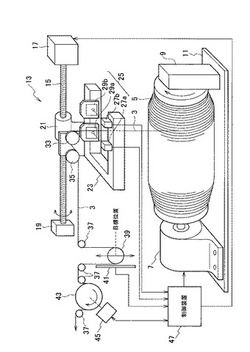
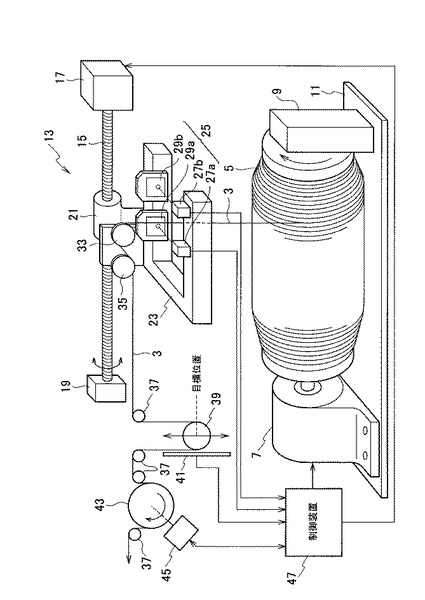
以下、本発明の実施の形態について図面を参照して説明する。図1は、本発明に係る線条体送出装置の実施形態を説明する概略構成図である。光ファイバ素線などの線条体3は、ボビン5に巻かれた状態で供給される。線条体送出装置1は、ボビン5から図外のプルーフテスタ等へ線条体3を送出する装置である。送出モータ7と軸受9がボビン5の両端を軸支するとともに、送出モータ7がボビン5を回転駆動することにより、線条体3がボビン5から送出される。送出モータ7と軸受9とは、ボビン保持台11に固定されている。
【0015】
線トラバース機構13は、ボールネジ15と、ボールネジ15の一端部を正逆両方向に回転駆動するボールネジ駆動モータ17と、ボールネジ15の他端部を軸支する軸受19と、ボールネジ15により図中左右方向へ滑動するスライダ21と、キャリア23を備える。
【0016】
キャリア23には、ガイドプーリ33,35が軸支されているとともに、位置検出器25が設けられている。キャリア23は、スライダ21に接続され、ボールネジ15の正逆回転により図中左右方向へ往復駆動される。したがって、線トラバース機構13は、ガイドプーリ33,35と、位置検出器25とを一体としてボビン軸方向と平行な方向へ往復駆動する機構である。
【0017】
ガイドプーリ33,35は、ボビン5から送出された線条体3の方向をボビン軸方向と平行な方向(図中左右方向)へ変換する。位置検出器25は、ボビン5とガイドプーリ33との間における線条体3のボビン軸方向の位置を検出する。位置検出器25は、レーザ投光器とレーザ受光器とを一体としたレーザ投受光器27a,27bと、反射板29a,29bとを備えている。
【0018】
本発明によれば、ボビン及びボビンを回転させる送出モータを往復駆動するボビントラバース機構に代えて、線トラバース機構13がガイドプーリ33,35と位置検出器25とをボビン軸方向へ往復駆動させるので、線条体送出装置1を小型軽量化することができるという効果がある。
【0019】
レーザ投受光器27a,27bは、それぞれレーザ投光器とレーザ受光器とを一体としたもので、小型軽量な半導体レーザダイオードによりレーザ光を投光し、半導体フォトダイオードまたはフォトトランジスタによりレーザ光を受光する。レーザ投受光器27aは反射板29aへ向かってレーザ光を投光するとともに、反射板29aで反射されたレーザ光を受光する。レーザ投受光器27bは反射板29bへ向かってレーザ光を投光するとともに、反射板29bで反射されたレーザ光を受光する。
【0020】
レーザ投受光器27a,27bと、反射板29a,29bとの間に線条体3が入ると、受光強度が低下することにより、レーザ投受光器27a,27bが線条体3の位置を検出する。本実施の形態では、線条体の位置検出にレーザ光を用いたので、検出のためのスポット径を小さくすることができ、光ファイバ素線等の細径の線条体でも正確に位置を検出することができる。
【0021】
反射鏡29a,29bは、レーザ光の周波数帯域内における反射率が高く、レーザ光の周波数帯域外における反射率が低くなるように、レーザ光の周波数帯域に合わせた反射特性を有するダイクロイックミラーを用いるのが好ましい。ダイクロイックミラーは、透明な基板上に、高屈折率と低屈折率の2種類の誘電体を交互に波長の1/4の厚さの薄膜として多層重ねて形成したものである。これによりダイクロイックミラーは、特定の波長の光を高い反射率で反射し、その他の波長の光を透過させることができる。反射鏡29a,29bにダイクロイックミラーを用いることにより、レーザ光の周波数帯域の光のみが反射されるので、外部光の影響を低減して正確な線条体の位置検出を行うことができるという効果がある。
【0022】
ガイドプーリ33,35により、ボビン軸方向と平行な方向(図中左右方向)へ変換された線条体3は、アイドラプーリ37、ダンサプーリ39、アイドラプーリ37、37、キャプスタン43、アイドラプーリ37を経て図外のプルーフテスタへ送出される。キャプスタン43は、キャプスタンモータ45により回転駆動され、基準線速度で線条体を送出する。ダンサプーリ39は、ガイドプーリ33,35と、キャプスタン43との間に上下移動自在に配置され、線条体3が掛け回されている。ダンサプーリ39は、自重または図示しない錘により下方に負荷され、この負荷と線条体3の張力により図示しないガイドレールに沿って上下移動する。ダンサプーリ位置検出器41は、ダンサプーリ39の位置検出信号を制御装置47へ送る。ここで、ダンサプーリ位置検出器41が出力する位置信号は、例えば、目標位置にある場合に0とし、目標位置より上方を正極性とし下方を負極性とした、目標位置からの偏差に応じてリニアな信号とする。
【0023】
制御装置47は、ダンサプーリ39の位置が所定の目標位置となるように、送出モータ7の回転速度を制御するとともに、線条体3の位置が位置検出器25の2つのレーザ光の間に収まるように、ボールネジ駆動モータ17の回転方向と回転速度を制御する。また制御装置47は、図外のプルーフテスタへ送出される線条体3の線速度が基準線速度となるように、キャプスタンモータ45の回転速度を制御する。
【0024】
制御装置47は、特に限定されないが、本実施の形態では、CPUと、プログラムROMと、作業用RAMと、入出力インタフェースとを備えたマイクロプロセッサで構成され、その制御機能は、プログラムROMに格納された制御プログラムにより、実現されているものとする。
【0025】
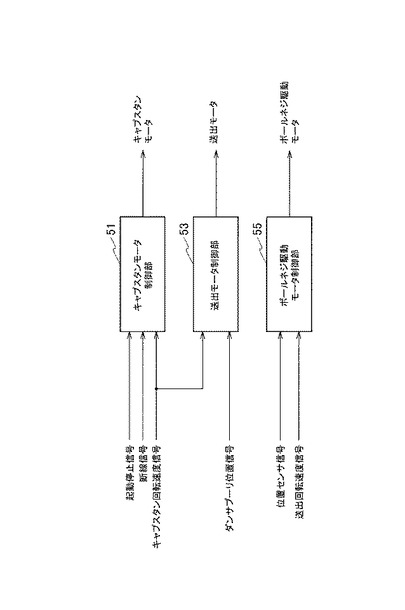
図2は、制御装置47の構成を説明する制御ブロック図である。制御装置47は、キャプスタンモータ制御部51と、送出モータ制御部53と、ボールネジ駆動モータ制御部55とを備えている。
【0026】
キャプスタンモータ制御部51は、図外の上位装置またはプルーフテスタから、キャプスタン43の起動停止を指示する起動停止信号と、プルーフテスタが線条体3の断線を検出したことを示す断線信号とを入力する。また、キャプスタンモータ45からキャプスタン回転速度信号を入力する。そして、キャプスタンモータ制御部51は、キャプスタン43の停止時に、起動停止信号が起動を示した場合、キャプスタンモータ45を起動して、キャプスタン43の周速度が基準線速度となるように加速する。逆に、キャプスタン43の回転時に、起動停止信号が停止を示せば、キャプスタンモータ45を停止させる。また、断線信号が入力したときに、回転中のキャプスタンモータ45を停止させる。
【0027】
送出モータ制御部53は、キャプスタン回転速度信号と、ダンサプーリ位置検出器41の検出信号とを入力し、ダンサプーリの位置が所定の目標位置となるように、送出モータ7の回転速度を制御する。ダンサプーリ位置検出器41が検出したダンサプーリ39の検出位置信号が正極性であれば、ボビン5から送出する線条体3の線速度が遅すぎるので、送出モータ制御部53は、送出モータ7の回転速度を増加させるように制御する。逆に、ダンサプーリ位置検出器41が検出したダンサプーリ39の検出位置信号が負極性であれば、ボビン5から送出する線条体3の線速度が速すぎるので、送出モータ制御部53は、送出モータ7の回転速度を低下させるように制御する。
【0028】
ボールネジ駆動モータ制御部55は、ボビン5から送出される線条体3の走行位置がレーザ投受光器27aのレーザ光とレーザ投受光器27bのレーザ光との間に保持されるように、ボールネジ駆動モータ17の回転方向と回転速度とを制御する。ボビン5から送出される線条体3の走行位置は、送出が進むに従って、図中右または左にずれてくる。例えば線条体3の走行位置がレーザ投受光器27aのレーザ光にかかると、レーザ投受光器27aが検出信号をボールネジ駆動モータ制御部55へ送信する。この検出信号を受信したボールネジ駆動モータ制御部55は、スライダ21を図中左へ移動させる方向へボールネジ駆動モータ17を駆動する。これとは逆に、線条体3の走行位置がレーザ投受光器27bのレーザ光にかかると、レーザ投受光器27bが検出信号をボールネジ駆動モータ制御部55へ送信する。この検出信号を受信したボールネジ駆動モータ制御部55は、スライダ21を図中右へ移動させる方向へボールネジ駆動モータ17を駆動する。これにより、ボビン5からガイドプーリ33へ送出される線条体3の走行位置は、レーザ投受光器27aのレーザ光とレーザ投受光器27bのレーザ光との間の所定範囲内に保持される。
【0029】
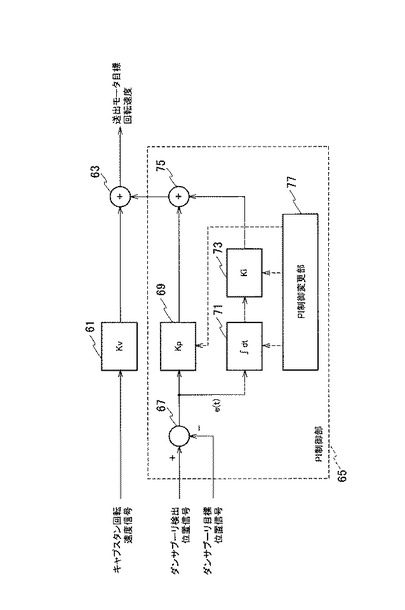
図3は、送出モータ制御部53による送出モータ目標回転速度の演算内容の詳細を説明する詳細ブロック図である。送出モータ制御部53は、キャプスタン回転速度信号に比例定数Kvを乗算する乗算部61と、ダンサプーリ39の位置を所定の目標位置に制御するPI制御部65と、乗算部61の出力にPI制御部65の出力を加算する加算部63とを備えている。
【0030】
ここで、キャプスタン43の直径をD1,ボビン5の直径をD2とすれば、比例定数Kvは、Kv=D1/D2として決定できる。
【0031】
PI制御部65は、ダンサプーリ検出位置信号からダンサプーリ目標位置信号を減算して偏差信号e(t)を生成する減算部67と、偏差信号e(t)に比例定数Kpを乗算して比例項を出力する乗算部69と、偏差信号e(t)を積分する積分部71と、偏差信号e(t)の積分値に比例定数Kiを乗算して積分項を出力する乗算部73と、比例項と積分項とを加算する加算部75と、PI制御変更部77とを備えている。
【0032】
以上の構成により、加算部63が出力する送出モータ目標回転速度は、キャプスタン回転速度に比例定数Kvを乗じた項と、PI制御の比例項と、PI制御の積分項との和となる。
【0033】
PI制御変更部77は、送出モータ7の定速状態を判定するために、例えば、送出モータ7の回転速度を検出して、その回転速度の所定時間内の変動幅が所定以内ととなったときに、定速状態と判定する。また、ダンサプーリ検出位置信号及び送出モータ目標回転速度のそれぞれの所定時間内の変動幅が所定以内となったときに、送出モータ7の定速状態と判定してもよい。
【0034】
PI制御変更部77は、送出モータ7の停止状態から増速して定速状態となったときに、PI制御における積分項の値である乗算器73の出力を減少させるとともに、比例ゲインKpを増加させて、送出モータ目標回転速度を維持することにより、送出モータ7の定速状態を維持する。そして、線条体3の断線時に、増加させた比例ゲインKpを用いて送出モータ7の回転を定速状態から停止させる制御を行う。乗算器73の出力を減少させる場合、積分器71の出力を減少させてもよいし、比例定数Kiを減少させてもよい。また、PI制御変更部77は、PI制御における積分項の値を減少する場合、積分器71の出力を0とするか、あるいは比例定数Kiを0とする制御を行ってもよい。
【0035】
このように送出モータ7の定速状態において、積分項の値を減少または0とすることにより、定速状態で線条体3の断線が検出され、キャプスタンモータ45及び送出モータ7を停止させる際に、積分項の影響が少なくなるかあるいは0となり、送出モータ7を速やかに安定的に停止させることができ、この際にダンサプーリ39が跳ねるような不安定な現象が生じることはない。
【0036】
尚、実施形態の変形例として、送出モータ制御部53へキャプスタン回転速度信号を入力することなく、キャプスタン43の回転中は、線条体3の基準線速度に対応するキャプスタン基準回転速度にKvを乗じた値を加算部63へ供給するように変更してもよい。但し、この場合には、ダンサプーリ39の上下移動範囲を大きくとる必要がある。
【0037】
以上、実施形態を用いて本発明を詳細に説明したが、本発明は本明細書中に説明した実施形態に限定されるものではない。本発明の範囲は、特許請求の範囲の記載及び特許請求の範囲の記載と均等の範囲により決定されるものである。
【符号の説明】
【0038】
1 線条体送出装置
3 線条体
5 ボビン
7 送出モータ
9 軸受
11 ボビン保持台
13 線トラバース機構
15 ボールネジ
17 ボールネジ駆動モータ
19 軸受
21 スライダ
23 キャリア
25 位置検出器
27a、27b レーザ投受光器
29a,29b 反射板
33、35 ガイドプーリ
37 アイドラプーリ
39 ダンサプーリ
41 ダンサプーリ位置検出器
43 キャプスタン
45 キャプスタンモータ
47 制御装置
51 キャプスタンモータ制御部
53 送出モータ制御部
55 ボールネジ駆動モータ制御部
65 PI制御部
【技術分野】
【0001】
この発明は、ボビンに巻かれた線条体を送出する線条体送出装置およびその方法に関する。
【背景技術】
【0002】
従来よりボビンに巻かれた光ファイバ素線等の線条体を張力試験のためのプルーフテスターに送出するために、特許文献1に記載のボビントラバース法が用いられている。このボビントラバース法は、送出モータにより回転駆動されるボビンから線条体を送出する際に、線条体の送出位置に応じてボビンをボビン軸方向に往復移動させることにより、線条体の走行位置を常に一定の行路に保持する方法である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−12370号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記ボビントラバース法では、送出モータとともにボビンをボビン軸方向へ往復移動させるボビントラバース機構が大規模となり、線条体送出装置が大型重量化するという問題点があった。
【0005】
上記問題点を解決するために、本発明の目的は、小型軽量化した線条体送出装置及びその方法を提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために本発明は、ボビンを回転駆動してボビンに巻かれた線条体を送出する送出モータと、前記ボビンから送出された線条体の方向をボビン軸方向と平行な方向へ変換するガイドプーリと、前記ボビンと前記ガイドプーリとの間の位置における前記線条体の前記ボビン軸方向の位置を検出する位置検出手段と、前記ガイドプーリにより方向変換された線条体を基準線速度で送出するキャプスタンと、前記ガイドプーリと前記キャプスタンとの間に上下移動自在に配置され前記線条体が掛け回されたダンサプーリと、前記ガイドプーリ及び前記位置検出手段を前記ボビン軸方向へ往復駆動させる線トラバース機構と、前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度を制御するとともに、前記位置検出手段が検出した線条体の位置が前記線トラバース機構の所定範囲内となるように前記線トラバース機構を制御する制御装置と、を備えたことを要旨とする線条体送出装置である。
【0007】
また本発明に係る線条体送出装置においては、前記位置検出手段は、レーザ光を投光するレーザ投光器と、該レーザ投光器からのレーザ光を反射する反射板と、該反射板で反射されたレーザ光を受光するレーザ受光器と、を備えてなり、前記反射板は、前記レーザ光の周波数帯域内における反射率より該帯域外における反射率を低くしたことを要旨とする。
【0008】
また本発明に係る線条体送出装置においては、前記制御装置は、前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度を比例積分(PI)制御し、前記送出モータの停止状態から増速して定速状態となったときに、PI制御における積分項の値を減少させるとともに比例ゲインを増加させて、前記定速状態を維持することにより、前記線条体の断線時に、前記増加させた比例ゲインを用いて前記送出モータの回転を定速状態から停止させることを要旨とする。
【0009】
また本発明は、ボビンを回転駆動してボビンに巻かれた線条体を送出する送出モータと、前記ボビンから送出された線条体の方向をボビン軸方向と平行な方向へ変換するガイドプーリと、前記ボビンと前記ガイドプーリとの間の位置における前記線条体の前記ボビン軸方向の位置を検出する位置検出手段と、前記ガイドプーリにより方向変換された線条体を基準線速度で送出するキャプスタンと、前記ガイドプーリと前記キャプスタンとの間に上下移動自在に配置され前記線条体が掛け回されたダンサプーリと、前記ガイドプーリ及び前記位置検出手段を前記ボビン軸方向へ往復駆動させる線トラバース機構と、前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度を制御する制御装置と、を備えた線条体送出装置により線条体を送出する線条体送出方法であって、前記制御装置は、前記キャプスタンを停止状態から起動して前記線条体の基準線速度まで増速し、前記キャプスタンの増速に応じて前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度をPI制御し、前記送出モータの回転速度が定速状態となったときに、PI制御における積分項の値を減少させるとともに、比例ゲインを増加させて前記定速状態を維持し、前記線条体の断線が検出されたときに、前記キャプスタンを急速に停止させるとともに、前記増加させた比例ゲインを用いて前記送出モータの回転速度を制御することを要旨とする。
【発明の効果】
【0010】
本発明によれば、ボビントラバース機構がボビン及び送出モータを往復駆動するのではなく、線トラバース機構がガイドプーリと位置検出手段とをボビン軸方向へ往復駆動させるので、線条体送出装置を小型軽量化することができるという効果がある。
【0011】
また本発明によれば、線条体の位置検出のために、レーザ投光器と、反射板と、レーザ受光器とを用い、反射板は、レーザ光の周波数帯域内における反射率より該帯域外における反射率を低くしたことにより、外部光の影響を低減して正確な線条体の位置検出を行うことができるという効果がある。
【0012】
また本発明によれば、制御装置は、ダンサプーリの位置が所定の目標位置となるように送出モータの回転速度をPI制御し、送出モータの停止状態から増速して定速状態となったときに、PI制御における積分項の値を減少させるとともに比例ゲインを増加させて、定速状態を維持することにより、線条体の断線時に、積分項の影響を受けることなく、送出モータの回転速度を安定的に速やかに停止状態へ移行させることができるという効果がある。
【図面の簡単な説明】
【0013】
【図1】本発明に係る線条体送出装置の実施形態を説明するの概略構成図である。
【図2】制御装置の構成を説明する制御ブロック図である。
【図3】送出モータ制御部の詳細を説明する詳細制御ブロック図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について図面を参照して説明する。図1は、本発明に係る線条体送出装置の実施形態を説明する概略構成図である。光ファイバ素線などの線条体3は、ボビン5に巻かれた状態で供給される。線条体送出装置1は、ボビン5から図外のプルーフテスタ等へ線条体3を送出する装置である。送出モータ7と軸受9がボビン5の両端を軸支するとともに、送出モータ7がボビン5を回転駆動することにより、線条体3がボビン5から送出される。送出モータ7と軸受9とは、ボビン保持台11に固定されている。
【0015】
線トラバース機構13は、ボールネジ15と、ボールネジ15の一端部を正逆両方向に回転駆動するボールネジ駆動モータ17と、ボールネジ15の他端部を軸支する軸受19と、ボールネジ15により図中左右方向へ滑動するスライダ21と、キャリア23を備える。
【0016】
キャリア23には、ガイドプーリ33,35が軸支されているとともに、位置検出器25が設けられている。キャリア23は、スライダ21に接続され、ボールネジ15の正逆回転により図中左右方向へ往復駆動される。したがって、線トラバース機構13は、ガイドプーリ33,35と、位置検出器25とを一体としてボビン軸方向と平行な方向へ往復駆動する機構である。
【0017】
ガイドプーリ33,35は、ボビン5から送出された線条体3の方向をボビン軸方向と平行な方向(図中左右方向)へ変換する。位置検出器25は、ボビン5とガイドプーリ33との間における線条体3のボビン軸方向の位置を検出する。位置検出器25は、レーザ投光器とレーザ受光器とを一体としたレーザ投受光器27a,27bと、反射板29a,29bとを備えている。
【0018】
本発明によれば、ボビン及びボビンを回転させる送出モータを往復駆動するボビントラバース機構に代えて、線トラバース機構13がガイドプーリ33,35と位置検出器25とをボビン軸方向へ往復駆動させるので、線条体送出装置1を小型軽量化することができるという効果がある。
【0019】
レーザ投受光器27a,27bは、それぞれレーザ投光器とレーザ受光器とを一体としたもので、小型軽量な半導体レーザダイオードによりレーザ光を投光し、半導体フォトダイオードまたはフォトトランジスタによりレーザ光を受光する。レーザ投受光器27aは反射板29aへ向かってレーザ光を投光するとともに、反射板29aで反射されたレーザ光を受光する。レーザ投受光器27bは反射板29bへ向かってレーザ光を投光するとともに、反射板29bで反射されたレーザ光を受光する。
【0020】
レーザ投受光器27a,27bと、反射板29a,29bとの間に線条体3が入ると、受光強度が低下することにより、レーザ投受光器27a,27bが線条体3の位置を検出する。本実施の形態では、線条体の位置検出にレーザ光を用いたので、検出のためのスポット径を小さくすることができ、光ファイバ素線等の細径の線条体でも正確に位置を検出することができる。
【0021】
反射鏡29a,29bは、レーザ光の周波数帯域内における反射率が高く、レーザ光の周波数帯域外における反射率が低くなるように、レーザ光の周波数帯域に合わせた反射特性を有するダイクロイックミラーを用いるのが好ましい。ダイクロイックミラーは、透明な基板上に、高屈折率と低屈折率の2種類の誘電体を交互に波長の1/4の厚さの薄膜として多層重ねて形成したものである。これによりダイクロイックミラーは、特定の波長の光を高い反射率で反射し、その他の波長の光を透過させることができる。反射鏡29a,29bにダイクロイックミラーを用いることにより、レーザ光の周波数帯域の光のみが反射されるので、外部光の影響を低減して正確な線条体の位置検出を行うことができるという効果がある。
【0022】
ガイドプーリ33,35により、ボビン軸方向と平行な方向(図中左右方向)へ変換された線条体3は、アイドラプーリ37、ダンサプーリ39、アイドラプーリ37、37、キャプスタン43、アイドラプーリ37を経て図外のプルーフテスタへ送出される。キャプスタン43は、キャプスタンモータ45により回転駆動され、基準線速度で線条体を送出する。ダンサプーリ39は、ガイドプーリ33,35と、キャプスタン43との間に上下移動自在に配置され、線条体3が掛け回されている。ダンサプーリ39は、自重または図示しない錘により下方に負荷され、この負荷と線条体3の張力により図示しないガイドレールに沿って上下移動する。ダンサプーリ位置検出器41は、ダンサプーリ39の位置検出信号を制御装置47へ送る。ここで、ダンサプーリ位置検出器41が出力する位置信号は、例えば、目標位置にある場合に0とし、目標位置より上方を正極性とし下方を負極性とした、目標位置からの偏差に応じてリニアな信号とする。
【0023】
制御装置47は、ダンサプーリ39の位置が所定の目標位置となるように、送出モータ7の回転速度を制御するとともに、線条体3の位置が位置検出器25の2つのレーザ光の間に収まるように、ボールネジ駆動モータ17の回転方向と回転速度を制御する。また制御装置47は、図外のプルーフテスタへ送出される線条体3の線速度が基準線速度となるように、キャプスタンモータ45の回転速度を制御する。
【0024】
制御装置47は、特に限定されないが、本実施の形態では、CPUと、プログラムROMと、作業用RAMと、入出力インタフェースとを備えたマイクロプロセッサで構成され、その制御機能は、プログラムROMに格納された制御プログラムにより、実現されているものとする。
【0025】
図2は、制御装置47の構成を説明する制御ブロック図である。制御装置47は、キャプスタンモータ制御部51と、送出モータ制御部53と、ボールネジ駆動モータ制御部55とを備えている。
【0026】
キャプスタンモータ制御部51は、図外の上位装置またはプルーフテスタから、キャプスタン43の起動停止を指示する起動停止信号と、プルーフテスタが線条体3の断線を検出したことを示す断線信号とを入力する。また、キャプスタンモータ45からキャプスタン回転速度信号を入力する。そして、キャプスタンモータ制御部51は、キャプスタン43の停止時に、起動停止信号が起動を示した場合、キャプスタンモータ45を起動して、キャプスタン43の周速度が基準線速度となるように加速する。逆に、キャプスタン43の回転時に、起動停止信号が停止を示せば、キャプスタンモータ45を停止させる。また、断線信号が入力したときに、回転中のキャプスタンモータ45を停止させる。
【0027】
送出モータ制御部53は、キャプスタン回転速度信号と、ダンサプーリ位置検出器41の検出信号とを入力し、ダンサプーリの位置が所定の目標位置となるように、送出モータ7の回転速度を制御する。ダンサプーリ位置検出器41が検出したダンサプーリ39の検出位置信号が正極性であれば、ボビン5から送出する線条体3の線速度が遅すぎるので、送出モータ制御部53は、送出モータ7の回転速度を増加させるように制御する。逆に、ダンサプーリ位置検出器41が検出したダンサプーリ39の検出位置信号が負極性であれば、ボビン5から送出する線条体3の線速度が速すぎるので、送出モータ制御部53は、送出モータ7の回転速度を低下させるように制御する。
【0028】
ボールネジ駆動モータ制御部55は、ボビン5から送出される線条体3の走行位置がレーザ投受光器27aのレーザ光とレーザ投受光器27bのレーザ光との間に保持されるように、ボールネジ駆動モータ17の回転方向と回転速度とを制御する。ボビン5から送出される線条体3の走行位置は、送出が進むに従って、図中右または左にずれてくる。例えば線条体3の走行位置がレーザ投受光器27aのレーザ光にかかると、レーザ投受光器27aが検出信号をボールネジ駆動モータ制御部55へ送信する。この検出信号を受信したボールネジ駆動モータ制御部55は、スライダ21を図中左へ移動させる方向へボールネジ駆動モータ17を駆動する。これとは逆に、線条体3の走行位置がレーザ投受光器27bのレーザ光にかかると、レーザ投受光器27bが検出信号をボールネジ駆動モータ制御部55へ送信する。この検出信号を受信したボールネジ駆動モータ制御部55は、スライダ21を図中右へ移動させる方向へボールネジ駆動モータ17を駆動する。これにより、ボビン5からガイドプーリ33へ送出される線条体3の走行位置は、レーザ投受光器27aのレーザ光とレーザ投受光器27bのレーザ光との間の所定範囲内に保持される。
【0029】
図3は、送出モータ制御部53による送出モータ目標回転速度の演算内容の詳細を説明する詳細ブロック図である。送出モータ制御部53は、キャプスタン回転速度信号に比例定数Kvを乗算する乗算部61と、ダンサプーリ39の位置を所定の目標位置に制御するPI制御部65と、乗算部61の出力にPI制御部65の出力を加算する加算部63とを備えている。
【0030】
ここで、キャプスタン43の直径をD1,ボビン5の直径をD2とすれば、比例定数Kvは、Kv=D1/D2として決定できる。
【0031】
PI制御部65は、ダンサプーリ検出位置信号からダンサプーリ目標位置信号を減算して偏差信号e(t)を生成する減算部67と、偏差信号e(t)に比例定数Kpを乗算して比例項を出力する乗算部69と、偏差信号e(t)を積分する積分部71と、偏差信号e(t)の積分値に比例定数Kiを乗算して積分項を出力する乗算部73と、比例項と積分項とを加算する加算部75と、PI制御変更部77とを備えている。
【0032】
以上の構成により、加算部63が出力する送出モータ目標回転速度は、キャプスタン回転速度に比例定数Kvを乗じた項と、PI制御の比例項と、PI制御の積分項との和となる。
【0033】
PI制御変更部77は、送出モータ7の定速状態を判定するために、例えば、送出モータ7の回転速度を検出して、その回転速度の所定時間内の変動幅が所定以内ととなったときに、定速状態と判定する。また、ダンサプーリ検出位置信号及び送出モータ目標回転速度のそれぞれの所定時間内の変動幅が所定以内となったときに、送出モータ7の定速状態と判定してもよい。
【0034】
PI制御変更部77は、送出モータ7の停止状態から増速して定速状態となったときに、PI制御における積分項の値である乗算器73の出力を減少させるとともに、比例ゲインKpを増加させて、送出モータ目標回転速度を維持することにより、送出モータ7の定速状態を維持する。そして、線条体3の断線時に、増加させた比例ゲインKpを用いて送出モータ7の回転を定速状態から停止させる制御を行う。乗算器73の出力を減少させる場合、積分器71の出力を減少させてもよいし、比例定数Kiを減少させてもよい。また、PI制御変更部77は、PI制御における積分項の値を減少する場合、積分器71の出力を0とするか、あるいは比例定数Kiを0とする制御を行ってもよい。
【0035】
このように送出モータ7の定速状態において、積分項の値を減少または0とすることにより、定速状態で線条体3の断線が検出され、キャプスタンモータ45及び送出モータ7を停止させる際に、積分項の影響が少なくなるかあるいは0となり、送出モータ7を速やかに安定的に停止させることができ、この際にダンサプーリ39が跳ねるような不安定な現象が生じることはない。
【0036】
尚、実施形態の変形例として、送出モータ制御部53へキャプスタン回転速度信号を入力することなく、キャプスタン43の回転中は、線条体3の基準線速度に対応するキャプスタン基準回転速度にKvを乗じた値を加算部63へ供給するように変更してもよい。但し、この場合には、ダンサプーリ39の上下移動範囲を大きくとる必要がある。
【0037】
以上、実施形態を用いて本発明を詳細に説明したが、本発明は本明細書中に説明した実施形態に限定されるものではない。本発明の範囲は、特許請求の範囲の記載及び特許請求の範囲の記載と均等の範囲により決定されるものである。
【符号の説明】
【0038】
1 線条体送出装置
3 線条体
5 ボビン
7 送出モータ
9 軸受
11 ボビン保持台
13 線トラバース機構
15 ボールネジ
17 ボールネジ駆動モータ
19 軸受
21 スライダ
23 キャリア
25 位置検出器
27a、27b レーザ投受光器
29a,29b 反射板
33、35 ガイドプーリ
37 アイドラプーリ
39 ダンサプーリ
41 ダンサプーリ位置検出器
43 キャプスタン
45 キャプスタンモータ
47 制御装置
51 キャプスタンモータ制御部
53 送出モータ制御部
55 ボールネジ駆動モータ制御部
65 PI制御部
【特許請求の範囲】
【請求項1】
ボビンを回転駆動してボビンに巻かれた線条体を送出する送出モータと、
前記ボビンから送出された線条体の方向をボビン軸方向と平行な方向へ変換するガイドプーリと、
前記ボビンと前記ガイドプーリとの間における前記線条体の前記ボビン軸方向の位置を検出する位置検出手段と、
前記ガイドプーリにより方向変換された線条体を基準線速度で送出するキャプスタンと、
前記ガイドプーリと前記キャプスタンとの間に上下移動自在に配置され前記線条体が掛け回されたダンサプーリと、
該ダンサプーリの位置を検出するダンサプーリ位置検出手段と、
前記ガイドプーリ及び前記位置検出手段を一体として前記ボビン軸方向と平行な方向へ往復駆動する線トラバース機構と、
前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度を制御するとともに、前記位置検出手段が検出した線条体の位置が前記線トラバース機構の所定範囲内となるように前記線トラバース機構を制御する制御装置と、
を備えたことを特徴とする線条体送出装置。
【請求項2】
前記位置検出手段は、レーザ光を投光するレーザ投光器と、該レーザ投光器からのレーザ光を反射する反射板と、該反射板で反射されたレーザ光を受光するレーザ受光器と、を備えてなり、
前記反射板は、前記レーザ光の周波数帯域内における反射率より該帯域外における反射率を低くしたことを特徴とする請求項1に記載の線条体送出装置。
【請求項3】
前記制御装置は、
前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度をPI制御し、
前記送出モータの停止状態から増速して定速状態となったときに、PI制御における積分項の値を減少させるとともに比例ゲインを増加させて、前記定速状態を維持することにより、前記線条体の断線時に、前記増加させた比例ゲインを用いて前記送出モータの回転を定速状態から停止させることを特徴とする請求項1または請求項2に記載の線条体送出装置。
【請求項4】
ボビンを回転駆動してボビンに巻かれた線条体を送出する送出モータと、
前記ボビンから送出された線条体の方向をボビン軸方向と平行な方向へ変換するガイドプーリと、
前記ボビンと前記ガイドプーリとの間における前記線条体の前記ボビン軸方向の位置を検出する位置検出手段と、
前記ガイドプーリにより方向変換された線条体を基準線速度で送出するキャプスタンと、
前記ガイドプーリと前記キャプスタンとの間に上下移動自在に配置され前記線条体が掛け回されたダンサプーリと、
該ダンサプーリの位置を検出するダンサプーリ位置検出手段と、
前記ガイドプーリ及び前記位置検出手段を一体として前記ボビン軸方向と平行な方向へへ往復駆動する線トラバース機構と、
前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度を制御する制御装置と、を備えた線条体送出装置により線条体を送出する線条体送出方法であって、
前記制御装置は、前記キャプスタンを停止状態から起動して前記線条体の基準線速度まで増速し、
前記キャプスタンの増速に応じて前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度をPI制御し、
前記送出モータの回転速度が定速状態となったときに、PI制御における積分項の値を減少させるとともに、比例ゲインを増加させて前記定速状態を維持し、
前記線条体の断線が検出されたときに、前記キャプスタンを停止させるとともに、前記増加させた比例ゲインを用いて前記送出モータの回転速度を制御することを特徴とする線条体送出方法。
【請求項1】
ボビンを回転駆動してボビンに巻かれた線条体を送出する送出モータと、
前記ボビンから送出された線条体の方向をボビン軸方向と平行な方向へ変換するガイドプーリと、
前記ボビンと前記ガイドプーリとの間における前記線条体の前記ボビン軸方向の位置を検出する位置検出手段と、
前記ガイドプーリにより方向変換された線条体を基準線速度で送出するキャプスタンと、
前記ガイドプーリと前記キャプスタンとの間に上下移動自在に配置され前記線条体が掛け回されたダンサプーリと、
該ダンサプーリの位置を検出するダンサプーリ位置検出手段と、
前記ガイドプーリ及び前記位置検出手段を一体として前記ボビン軸方向と平行な方向へ往復駆動する線トラバース機構と、
前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度を制御するとともに、前記位置検出手段が検出した線条体の位置が前記線トラバース機構の所定範囲内となるように前記線トラバース機構を制御する制御装置と、
を備えたことを特徴とする線条体送出装置。
【請求項2】
前記位置検出手段は、レーザ光を投光するレーザ投光器と、該レーザ投光器からのレーザ光を反射する反射板と、該反射板で反射されたレーザ光を受光するレーザ受光器と、を備えてなり、
前記反射板は、前記レーザ光の周波数帯域内における反射率より該帯域外における反射率を低くしたことを特徴とする請求項1に記載の線条体送出装置。
【請求項3】
前記制御装置は、
前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度をPI制御し、
前記送出モータの停止状態から増速して定速状態となったときに、PI制御における積分項の値を減少させるとともに比例ゲインを増加させて、前記定速状態を維持することにより、前記線条体の断線時に、前記増加させた比例ゲインを用いて前記送出モータの回転を定速状態から停止させることを特徴とする請求項1または請求項2に記載の線条体送出装置。
【請求項4】
ボビンを回転駆動してボビンに巻かれた線条体を送出する送出モータと、
前記ボビンから送出された線条体の方向をボビン軸方向と平行な方向へ変換するガイドプーリと、
前記ボビンと前記ガイドプーリとの間における前記線条体の前記ボビン軸方向の位置を検出する位置検出手段と、
前記ガイドプーリにより方向変換された線条体を基準線速度で送出するキャプスタンと、
前記ガイドプーリと前記キャプスタンとの間に上下移動自在に配置され前記線条体が掛け回されたダンサプーリと、
該ダンサプーリの位置を検出するダンサプーリ位置検出手段と、
前記ガイドプーリ及び前記位置検出手段を一体として前記ボビン軸方向と平行な方向へへ往復駆動する線トラバース機構と、
前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度を制御する制御装置と、を備えた線条体送出装置により線条体を送出する線条体送出方法であって、
前記制御装置は、前記キャプスタンを停止状態から起動して前記線条体の基準線速度まで増速し、
前記キャプスタンの増速に応じて前記ダンサプーリの位置が所定の目標位置となるように前記送出モータの回転速度をPI制御し、
前記送出モータの回転速度が定速状態となったときに、PI制御における積分項の値を減少させるとともに、比例ゲインを増加させて前記定速状態を維持し、
前記線条体の断線が検出されたときに、前記キャプスタンを停止させるとともに、前記増加させた比例ゲインを用いて前記送出モータの回転速度を制御することを特徴とする線条体送出方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−41112(P2012−41112A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2010−182223(P2010−182223)
【出願日】平成22年8月17日(2010.8.17)
【出願人】(000005186)株式会社フジクラ (4,463)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成22年8月17日(2010.8.17)
【出願人】(000005186)株式会社フジクラ (4,463)
【Fターム(参考)】
[ Back to top ]