
締付工具
【課題】 作業者が、ネジ類から受ける反力に抗して、支持しやすい締付工具を具現化する。
【解決手段】 締付工具は、モータと、ネジ類に係合する工具と、モータと工具との間に介装されている一対のクラッチ部材と、一対のクラッチ部材の少なくとも一方を他方に押圧する付勢手段を備えている。一対のクラッチ部材には、少なくとも第1係合部と第2係合部が形成されている。第1係合部は、工具に加えられているトルクが第1所定値以上となると、一対のクラッチ部材の係合を解除する。第2係合部は、工具に加えられているトルクが第1所定値よりも大きい第2所定値以上となると、一対のクラッチ部材の係合を解除する。そして、一対のクラッチ部材は、第1係合部の係合が解除された後に、第2係合部が係合することを特徴とする。
【解決手段】 締付工具は、モータと、ネジ類に係合する工具と、モータと工具との間に介装されている一対のクラッチ部材と、一対のクラッチ部材の少なくとも一方を他方に押圧する付勢手段を備えている。一対のクラッチ部材には、少なくとも第1係合部と第2係合部が形成されている。第1係合部は、工具に加えられているトルクが第1所定値以上となると、一対のクラッチ部材の係合を解除する。第2係合部は、工具に加えられているトルクが第1所定値よりも大きい第2所定値以上となると、一対のクラッチ部材の係合を解除する。そして、一対のクラッチ部材は、第1係合部の係合が解除された後に、第2係合部が係合することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ネジ類(ボルト、ナット、スクリュウ等)を締付ける締付工具に関する。特に、モータから工具へ伝達するトルクを制限するクラッチ機構を備える締付工具に関する。
【背景技術】
【0002】
モータから工具へ伝達するトルクを制限するクラッチ機構を備え、ネジ類を規定された締付トルクで締付ける締付工具が開発されている(例えば特許文献1)。クラッチ機構は、一対のクラッチ部材と、一対のクラッチ部材の一方を他方に押圧する付勢手段を用いて構成されている。一対のクラッチ部材は、一方がモータ側に接続されており、他方が工具側に接続されている。クラッチ機構では、一対のクラッチ部材が互いに係合することによってモータからのトルクが工具へ伝達され、一対のクラッチ部材の係合が解除されることによってモータから工具へのトルク伝達が遮断される。
一対のクラッチ部材には、係合部が形成されている。係合部は、工具に加えられているトルクが所定値未満のときには一対のクラッチ部材の係合を維持し、工具に加えられているトルクが所定値以上となると一対のクラッチ部材の係合を解除するように構成されている。
【特許文献1】実公昭50−33759号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
締付工具では、ネジ類を締付けている間、ネジ類から反力を受ける。作業者は、ネジ類から受ける反力に抗して、締付工具を支持する必要がある。
従来の締付工具では、ネジ類の頭部が母材に着座した時点から、締付トルクが所定値に到達する時点まで、ネジ類から受ける反力が急激に増大する。作業者は、急激に増大していく反力に抗して、締付工具を支持し続ける必要があり、比較的に大きな力を締付工具に加え続けなければならない。
本発明は、上記の問題を解決する。本発明は、ネジ類から受ける反力に抗して、作業者が支持しやすい締付工具を提供する。
【課題を解決するための手段】
【0004】
本発明によって具現化される締付工具は、モータと、ネジ類に係合する工具と、モータと工具との間に介装されており、互いに係合することによってモータからのトルクを工具へ伝達し、互いの係合を解除することによってモータから工具へのトルク伝達を遮断する一対のクラッチ部材と、一対のクラッチ部材の少なくとも一方を他方に押圧する付勢手段とを備えている。一対のクラッチ部材には、少なくとも第1係合部と第2係合部が設けられている。第1係合部は、工具に加えられているトルクが第1所定値未満のときには一対のクラッチ部材の係合を維持し、工具に加えられているトルクが第1所定値以上となると一対のクラッチ部材の係合を解除する。第2係合部は、工具に加えられているトルクが第1所定値よりも大きい第2所定値未満のときには一対のクラッチ部材の係合を維持し、工具に加えられているトルクが第2所定値以上となると一対のクラッチ部材の係合を解除する。一対のクラッチ部材は、第1係合部の係合が解除された後に、第2係合部が係合することを特徴とする。
【0005】
この締付工具では、一対のクラッチ部材が、先ず第1係合部によって係合される。一対のクラッチ部材は、ネジ類から工具に加えられているトルク(即ち、モータが現に加えているトルクであり、反力に等しい)が第1所定値に達するまで、係合した状態が維持される。そして、ネジ類から工具に加えられているトルクが第1所定値に達すると、一対のクラッチ部材の係合が解除される。一対のクラッチ部材の係合が解除されると、モータから工具へのトルク伝達が遮断される。その結果、締付工具がネジ類から受ける反力は、第1所定値に到達した時点で一旦低下する。
一対のクラッチ部材は、第1係合部による係合が解除されると、続いて第2係合部によって係合される。一対のクラッチ部材は、ネジ類から工具に加えられているトルクが第2所定値に達するまで、係合した状態が維持される。そして、ネジ類から工具に加えられているトルクが第2所定値に達すると、一対のクラッチ部材の係合が解除される。この段階で、ネジ類の締付トルクは第2所定値に達しており、締付工具がネジ類から受ける反力も第2所定値まで増大する。
この締付工具では、ネジ類を第2所定値の締付トルクによって締付ける際に、締付トルクが第1所定値に到達した時点で、一対のクラッチの係合が一旦解除される。それにより、締付工具がネジ類から受ける反力は、第1所定値に到達した時点で一旦低下し、その後に第2所定値まで増大する。締付工具がネジ類から受ける反力は、ネジ類が着座した時点で突然に増大するが、先ずは第1所定値に制限されることで、作業者は締付工具を無理なく支持し続けることができる。そして、締付工具がネジ類から受ける反力は、続いて第2所定値まで増大するが、作業者はその増大を予期することができるので、作業者は締付工具を無理なく支持し続けることができる。
【0006】
第1係合部と第2係合部のそれぞれには、他方のクラッチ部材と当接する傾斜面が形成されていることが好ましい。この場合、第1係合部の傾斜面よりも、第2係合部の傾斜面のほうが、傾斜角度が大きいことが好ましい。
各係合部に他方のクラッチ部材と当接する傾斜面を形成すると、前記した第1所定値や第2所定値は、傾斜面の傾斜角度によって調整することが可能となる。このとき、第1係合部の傾斜面のよりも、第2係合部の傾斜面の方が、傾斜角度が大きくなるように形成することによって、第1所定値よりも第2所定値の方が大きくなるように定めることができる。
【0007】
上記の締付工具では、一対のクラッチ部材の第2係合部の係合が解除された時に、モータの駆動を中止させるモータ制御手段が付加されていることが好ましい。
それにより、ネジ類の締付トルクが第2所定値に到達した時点で、モータの動作を中止させることができる。
【0008】
モータ制御手段は、一対のクラッチ部材の係合が所定回数に亘って解除された時に、モータの駆動を中止させることが好ましい。
上記した締付工具では、ネジ類の締付トルクが第2所定値に到達するまでに、一対のクラッチ部材が複数回に亘って係合解除される。そのことから、一対のクラッチ部材が係合解除された回数を計数し、その回数が所定回数に到達した時点でモータの駆動を中止させることによって、ネジ類の締付トルクが規定されたトルクに到達した時点で、モータの動作を中止させることができる。
【発明の効果】
【0009】
本発明によると、締付工具がネジ類から受ける反力に抗して作業者が支持しやすい締付工具を具現化することができる。
【発明を実施するための最良の形態】
【0010】
最初に、以下に説明する実施例の主要な特徴を列記する。
(形態1) 締付工具は、第1クラッチ部材と第2クラッチ部材を備えている。第1クラッチ部材はモータ側に接続されており、第2クラッチ部材は工具側に接続されている。
(形態2) 第1クラッチ部材と第2クラッチ部材の一方には、第1係合部と第2係合部と第3係合部が設けられている。第1クラッチ部材と第2クラッチ部材の他方には、第1係合部と第2係合部と第3係合部に当接する当接部が設けられている。当接部は、第1クラッチ部材と第2クラッチ部材との相対回転位置に応じて、第1係合部と第2係合部と第3係合部のいずれかに当接する。
(形態3) 締付工具は、一対のクラッチ部材の係合が解除されたことを検出する手段を備えている。
【実施例】
【0011】
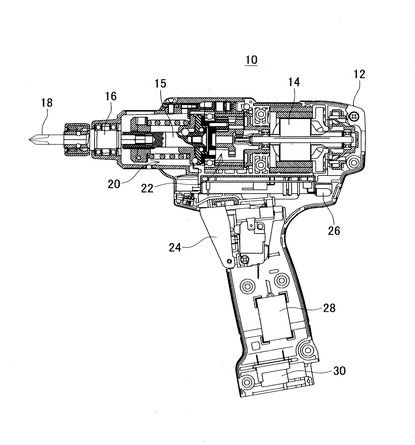
図1は、実施例1の電動ドライバ10の内部構成を示している。図1に示すように、電動ドライバ10は、ハウジング12と、ハウジングに内蔵されているモータ14と、ハウジング12に対して回転可能に支持されている工具チャック16と、ハウジング12に対して回転可能に支持されているスピンドル15と、モータ14の回転トルクをスピンドル15に伝達する減速機22およびクラッチ機構20を備えている。工具チャック16は、スピンドル15に対して固定されている。工具チャック16は、ネジ類(ボルト、ナット、スクリュウ等)に係合する工具(例えばドライバビット)18を着脱可能に構成されている。電動ドライバ10は、モータ14を回転させることによって、工具チャック16に装着されたドライバビット18を回転させる。
電動ドライバ10は、作業者が操作するトリガスイッチ24と、作業者に視認可能に設けられている表示ランプ26と、モータ14や表示ランプ26等の動作を制御する制御回路28と、電源となる電池パック(図9に示す)100を接続するためのコネクタ30を備えている。
【0012】
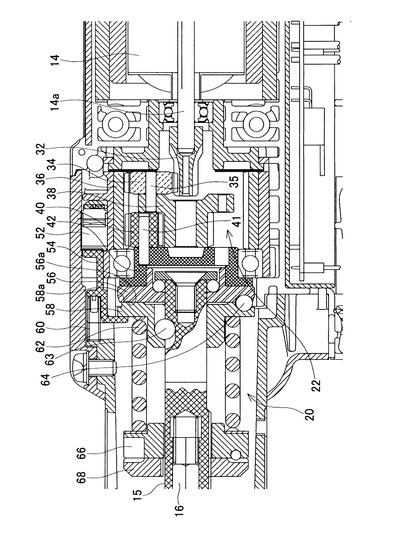
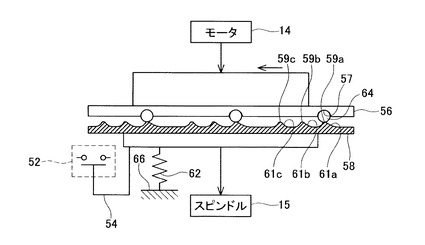
図2は、電動ドライバ10の減速機22およびクラッチ機構20を拡大して示している。図2に示すように、減速機22は、第1太陽ギヤ32と、3つの第1衛星ギヤ34(一部は図示省略)と、内歯ギヤ36と、第2太陽ギヤ38と、3つの第2衛星ギヤ(一部は図示省略)40と、出力部材42を備えている。第1太陽ギヤ32は、モータ14の出力軸14aに固定されている。第1衛星ギヤ34は、第1太陽ギヤ32と内歯ギヤ36の両者に噛合しており、第1太陽ギヤ32の回転を受けて自転しながら第1太陽ギヤ32の周囲を公転する。第2太陽ギヤ38には、第1衛星ギヤ34の自転軸35が固定されており、第1衛星ギヤ34の公転運動に従動して回転するようになっている。第2衛星ギヤ40は、第2太陽ギヤ38と内歯ギヤ36の両者に噛合しており、第2太陽ギヤ38の回転を受けて自転しながら第2太陽ギヤ38の周囲を公転する。出力部材42には、第2衛星ギヤ40の自転軸41が固定されており、第2衛星ギヤ40の公転運動に従動して回転する。このように、減速機22は、2段階に設けられた遊星ギヤ構造を備えており、モータ14の回転運動を所定の減速比で減速し、出力部材42の回転運動に出力する。即ち、出力部材42の回転トルクは、モータ14の回転トルクに対して、その減速比の逆数倍に増幅される。
【0013】
クラッチ機構20は、第1クラッチ部材56と、第2クラッチ部材58と、3つの当接球体64(一部図示省略)と、圧縮バネ62と、3つの接続球体63(一部図示省略)と、バネ拘束部材66と、調整部材68を備えている。
第1クラッチ部材56は、減速機22の出力部材42に固定されており、モータ14の回転に伴って出力部材42とともに回転する。一方、第2クラッチ部材58は、スピンドル15に設けられている。第2クラッチ部材58は、接続球体63を介してスピンドル15に接続されており、スピンドル15に対して相対回転不能に接続されているとともに、スピンドル15の軸方向には移動可能に支持されている。
第1クラッチ部材56には、第1対向面56aが形成されている。第2クラッチ部材58には、第2対向面58aが形成されている。第1クラッチ部材56の第1対向面56aと第2クラッチ部材58の第2対向面58aは、互いに対向している。当接球体64は、第1クラッチ部材56の第1対向面56aと第2クラッチ部材58の第2対向面58aとの間に介在している。圧縮バネ62は、第2クラッチ部材58を第1クラッチ部材56に向けて付勢している。第1クラッチ部材56と第2クラッチ部材58は、当接球体64を介して回転方向に関して係合する。第1クラッチ部材56と第2クラッチ部材58は、互いに係合することによってモータ14からのトルクをスピンドル15側へと伝達し、互いの係合を解除することによってモータ14からスピンドル15へのトルク伝達を遮断する。
バネ拘束部材66は、圧縮バネ62の反第2クラッチ部材58側の端部を拘束している。調整部材68は、スピンドル15の側面に螺合しており、回転することによってスピンドル15の軸方向に移動する。調整部材68がスピンドル15の軸方向に沿って移動することによって、バネ拘束部材66もスピンドル15の軸方向に沿って移動する。作業者は、調整部材68を回転させることによって、圧縮バネ62が第2クラッチ部材58を第1クラッチ部材56側へと押圧する押圧力を調整することができる。
【0014】
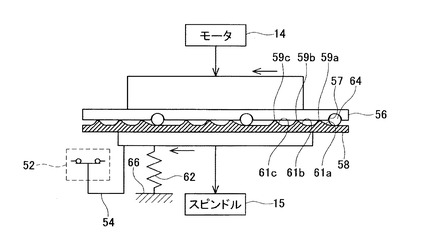
図2に示すように、電動ドライバ10は、第2クラッチ部材58の移動に伴って移動する連動部材54と、連動部材54の移動に伴ってオン/オフする検出スイッチ52と、連動部材54を検出スイッチ52側に向けて付勢している付勢バネ60を備えている。第2クラッチ部材58が第1クラッチ部材56側に位置している状態では、連動部材54は付勢バネ60による付勢力を受けて検出スイッチ52側に位置している。このとき、検出スイッチ52はオン状態となる。即ち、第1クラッチ部材56と第2クラッチ部材58が係合している間、検出スイッチ52はオン状態となる。一方、第2クラッチ部材58が第1クラッチ部材56から離間する方向に移動すると、連動部材54も検出スイッチ52から離間する方向に移動する。このとき、検出スイッチ52はオフ状態となる。即ち、第1クラッチ部材56と第2クラッチ部材58の係合が解除されている状態では、検出スイッチ52はオフ状態となる。
【0015】
次に、第1クラッチ部材56の第1対向面56aと第2クラッチ部材58の第2対向面58aについて説明する。
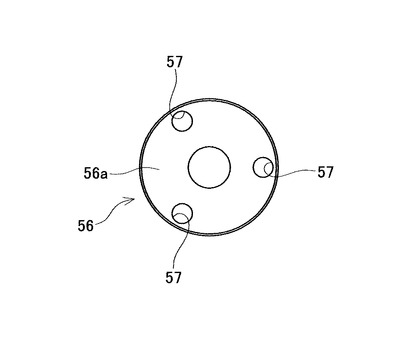
図3は、第1対向面56a側からみた第1クラッチ部材56を示している。図3に示すように、第1クラッチ部材56の第1対向面56aには、当接球体64が遊嵌するための凹部57が3箇所に形成されている。凹部57は、略半球形状に形成されている。3箇所の凹部57は、周方向に沿って等間隔に配置されている。当接球体64は、第1クラッチ部材56の凹部57によって保持され、第1クラッチ部材56と略一体となって回転する。そのことから、当接球体64は第1クラッチ部材56の一部とみなすこともでき、第1クラッチ部材56と当接球体64を一体に形成するようにしてもよい。
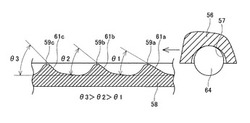
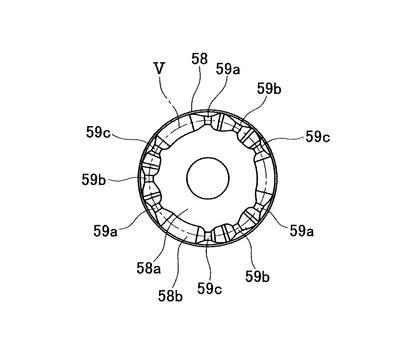
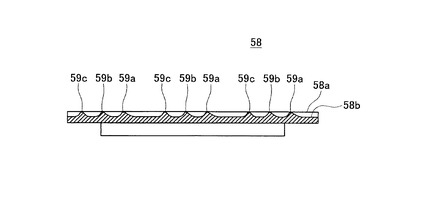
図4は、第2対向面58a側からみた第2クラッチ部材58を示している。図5は、図4に示す円形切断線Vにおける断面を展開して示している。図4、図5に示すように、第2クラッチ部材58の第2対向面58aには、周方向に沿って伸びている溝部58bが形成されている。溝部58bは、第1クラッチ部材56の凹部57と対向する位置に設けられている。溝部58bには、第1係合突起部59aと第2係合突起部59bと第3係合突起部59cとを一組とする係合突起部群59a、59b、59cが3組形成されている。3組の係合突起部群59a、59b、59cは、周方向に沿って等間隔に配置されている。
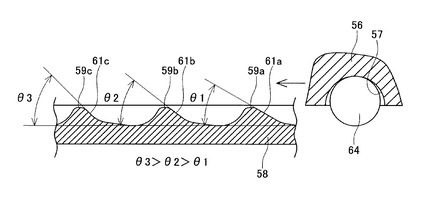
図6は、一組の係合突起部群59a、59b、59cを拡大して示している。図6に示すように、一組の係合突起部群59a、59b、59cでは、第2クラッチ部材58に対して第1クラッチ部材56が相対回転する方向に沿って、第1係合突起部59a、第2係合突起部59b、第3係合突起部59cの順に配置されている。
各係合突起部59a、59b、59cには、当接斜面61a、61b、61cが形成されている。当接斜面61a、61b、61cには、第1クラッチ部材56がモータ14によって回転させられたときに、第1クラッチ部材56側に保持されている当接球体64が当接する。第1係合突起部59aでは、第1当接斜面61aが傾斜角度θ1で形成されている。第2係合突起部59bでは、第2当接斜面61bが傾斜角度θ2で形成されている。第3係合突起部59cでは、第3当接斜面61cが傾斜角度θ3で形成されている。そして、傾斜角度θ1、θ2、θ3の大小関係は、θ1<θ2<θ3となっている。
【0016】
図7、図8を参照して、クラッチ機構20の動作について説明する。図7、図8は、第1クラッチ部材56と第2クラッチ部材58を周方向に展開して示している。図7に示すように、モータ14によって第1クラッチ部材56が回転させられると、第1クラッチ部材56の凹部57に遊嵌している当接球体64が、第2クラッチ部材58の第1係合突起部59aの第1当接斜面61aに当接する。当接球体64は第1係合突起部59aを乗り越えようとするが、圧縮バネ62による付勢力によって、当接球体64が第1係合突起部59aを乗り越えることが抑止される。第1クラッチ部材56と第2クラッチ部材58は回転方向に関して係合した状態となり、両者は一体となって回転する。それにより、モータ14の出力するトルクは、クラッチ機構20を介してスピンドル15へと伝達される。このとき、検出スイッチ52はオン状態となる。
一方、図8に示すように、スピンドル15に回転を規制するトルクを加えると、圧縮バネ62の付勢力に逆らって、当接球体64は第1係合突起部59aを乗り越える。このとき、第1クラッチ部材56と第2クラッチ部材58は回転方向に関して係合解除され、モータ14からスピンドル15へのトルク伝達が遮断される。即ち、電動ドライバ10によってネジを締付けたときに、その締付トルクが第1の所定値(例えばR1)に達すると、第1クラッチ部材56と第2クラッチ部材58間のトルク伝達が遮断される。このときの第1トルクR1は、主に、圧縮バネ62による付勢力と、第1当接斜面61aの傾斜角度θ1に応じて決まる。第1当接斜面61aの傾斜角度θ1が大きいほど、第1トルクR1は大きくなる。
【0017】
当接球体64が第1係合突起部59aを乗り越えると、第1クラッチ部材56は第2クラッチ部材58に対して相対回転し、当接球体64は第2係合突起部59bの第2当接斜面61bに当接する。それにより、第1クラッチ部材56と第2クラッチ部材58は、回転方向に関して再び係合する。そして、ネジ類に加えている締付トルクが第2の所定値(例えばR2)となると、当接球体64は第2係合突起部59bを乗り越える。当接球体64が第2係合突起部59bを乗り越えることによって、第1クラッチ部材56と第2クラッチ部材58間のトルク伝達は再び遮断される。このときの第2トルクR2は、主に、圧縮バネ62による付勢力と、第2当接斜面61bの傾斜角度θ2に応じて決まる。第2当接斜面61bの傾斜角度θ2は、第1当接斜面61aの傾斜角度θ1よりも大きいことから、第2トルクR2は第1トルクR1よりも大きくなる。
【0018】
当接球体64が第2係合突起部59bを乗り越えると、第1クラッチ部材56は第2クラッチ部材58に対して相対回転し、当接球体64が第3係合突起部59cの第3当接斜面61cに当接する。それにより、第1クラッチ部材56と第2クラッチ部材58は、回転方向に関して再び係合する。そして、ネジ類に加えている締付トルクが第3の所定値(例えばR3)となると、当接球体64は第3係合突起部59cを乗り越える。当接球体64が第3係合突起部59cを乗り越えることによって、第1クラッチ部材56と第2クラッチ部材58間のトルク伝達は再び遮断される。このときの第3トルクR3は、主に、圧縮バネ62による付勢力と、第3当接斜面61cの傾斜角度θ3に応じて決まる。第3当接斜面61cの傾斜角度θ3は、第2当接斜面61bの傾斜角度θ2よりも大きいことから、第3トルクR3は第2トルクR2よりも大きくなる。即ち、第1トルクR1<第2トルクR2<第3トルクR3の関係となっている。
当接球体64は、第3係合突起部59bcを乗り越えると、第1係合突起部59aの第1当接斜面61aに再び当接し、クラッチ機構20は図7に示す状態に戻る。
このように、クラッチ機構20では、ネジ類に加えているトルクが第1トルクR1となった時点で一時的にトルク伝達が遮断され、次いで、ネジ類に加えているトルクが第2トルクR2となった時点で一時的にトルク伝達が遮断され、次いで、ネジ類に加えている締付トルクが第3トルクR3となった時点でトルク伝達が遮断される。
【0019】
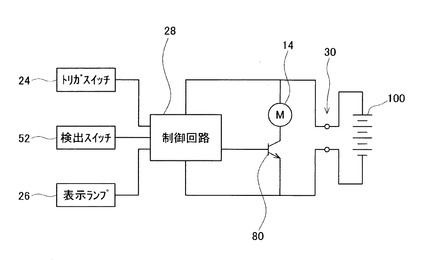
図9は、電動ドライバ10の回路構成を模式的に示している。図9に示すように、電動ドライバ10では、コネクタ30に接続された電池パック100から、モータ14に電力が供給されるとともに、制御回路28に電力が供給される。モータ14をコネクタ30を介して電池パック100に接続する回路上には、半導体スイッチ80が介挿されている。半導体スイッチ80は、制御回路28から出力される駆動信号によって、オン状態とオフ状態が切換えられる。
制御回路28は、マイクロコンピュータや定電圧電源回路等を備えている。制御回路28には、トリガスイッチ24や検出スイッチ52や表示ランプ26が接続されている。制御回路28は、トリガスイッチ24の出力信号と、検出スイッチ52の出力信号に基づいて、半導体スイッチ80や表示ランプ26の動作を制御する。
【0020】
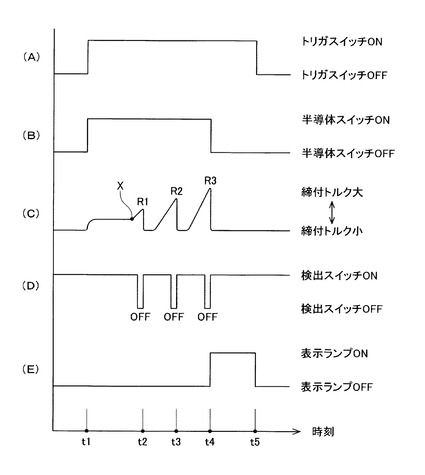
図10は、電動ドライバ10の各部の動作を経時的に示すタイムチャートである。図10を参照して、制御回路28の動作等について説明する。図10中の(A)はトリガスイッチ24のオン/オフ状態を示している。(B)は半導体スイッチ80のオン/オフ状態を示している。(C)はドライバビット18がネジ類から受ける反力トルクを示している。ドライバビット18がネジ類から受ける反力トルクは、ドライバビット18がネジ類に加えているトルクに略等しい。(D)は検出スイッチ52のオン/オフ状態を示している。(E)は表示ランプ26のオン/オフ状態を示している。
先ず、作業者は、ドライバビット18をネジに係合させ、トリガスイッチ24をオン操作する。この時点を時刻t1とする。時刻t1においてトリガスイッチ24にオン操作が加えられると、制御回路28は半導体スイッチ80に駆動信号を出力し、半導体スイッチ80をオンさせる。半導体スイッチ80がオンすることによって、モータ14が電池パック100(詳しくは電池パックに内蔵されている電池)に電気的に接続され、モータ14が回転を開始する。クラッチ機構20では、第1クラッチ部材56側に保持されている当接球体64が、第2クラッチ部材58側に設けられている第1係合突起部59aの第1当接斜面61aに当接し、モータ14からのトルクがスピンドル15側へと伝達される。モータ14によってドライバビット18は回転させられることとなり、ネジ類は母材へとねじ込まれていく。なお、作業者がトリガスイッチ24のオン操作を中止すると、制御回路28は半導体スイッチ80へ駆動信号の出力を中止し、モータ14は停止する。ここでは、後述する時刻t5まで、作業者がトリガスイッチ24のオン操作を継続するものとする。
【0021】
図10の(C)に示すように、ドライバビット18がネジ類から受ける反力トルクは、ネジの頭部が着座するまでは比較的に小さな値で推移し、ネジ類の頭部が着座した時点(図中のX)から急速に増大する。時刻t2において、ドライバビット18がネジから受ける反力トルク、即ち、ネジに加えている締付トルクが第1トルクR1に到達すると、当接球体64が第1係合突起部59aを乗り越え、第1クラッチ部材56と第2クラッチ部材58との間のトルク伝達が遮断される。第1係合突起部59aを乗り越えた当接球体64は、続いて第2係合突起部59bの第2当接斜面61bに当接する。それにより、第1クラッチ部材56と第2クラッチ部材58とは再び係合し、モータ14の出力するトルクがスピンドル15側へと伝達される。
時刻t3において、ドライバビット18がネジから受ける反力トルク、即ち、ネジの締付トルクが第2トルクR2に到達すると、当接球体64が第2係合突起部59bを乗り越え、第1クラッチ部材56と第2クラッチ部材58との間のトルク伝達が遮断される。第2係合突起部59bを乗り越えた当接球体64は、続いて第3係合突起部59cの第3当接斜面61cに当接する。それにより、第1クラッチ部材56と第2クラッチ部材58とは再び係合し、モータ14の出力するトルクがスピンドル15側へと伝達される。
時刻t4において、ドライバビット18がネジから受ける反力トルク、即ち、ネジの締付トルクが第3トルクR3に到達すると、当接球体64が第3係合突起部59cを乗り越え、第1クラッチ部材56と第2クラッチ部材58との間のトルク伝達が遮断される。
このように、クラッチ機構20では、ネジ類の締付トルクが第1トルクR1に達した時点と、ネジ類の締付トルクが第2トルクR2に達した時点と、ネジ類の締付トルクが第3トルクR3に達した時点の3回に亘って、トルク伝達が一時的に遮断される。電動ドライバ10がネジ類から受ける反力トルクは、ネジ類が着座した時点で突然に増大するが、先ずは第1トルクR1に制限されることで、作業者は締付工具を無理なく支持し続けることができる。電動ドライバ10がネジ類から受ける反力は、続いて第1トルクR1よりも大きい第2トルクR2まで増大するが、作業者はその増大を予期することができるので、作業者は締付工具を無理なく支持し続けることができる。そして、電動ドライバ10がネジ類から受ける反力は、続いて第2トルクR2よりも大きい第3トルクR3まで増大するが、作業者はその増大を予期することができるので、作業者は締付工具を無理なく支持し続けることができる。作業者は、ネジ類から受ける反力トルクに抗して、電動ドライバ10を無理なく支持し続けることができる。
【0022】
図10の(D)に示すように、検出スイッチ52は、クラッチ機構20がトルク伝達を遮断する時点(時刻t2、t3、t4)において一時的にオフ状態となる。検出スイッチ52が1度目のオフ状態となった時点(時刻t2)は、ネジ類の締付トルクが第1トルクR1に到達した時点に対応する。検出スイッチ52が2度目のオフ状態となった時点(時刻t3)は、ネジ類の締付トルクが第2トルクR2に到達した時点に対応する。検出スイッチ52が3度目のオフ状態となった時点(時刻t4)は、ネジ類の締付トルクが第3トルクR3に到達した時点を示す。制御回路28は、検出スイッチ52がオフ状態となった回数を計数しており、検出スイッチ52が3度目のオフ状態となったときに、図10の(B)に示すように半導体スイッチ80をオフするとともに、図10(E)に示すように表示ランプをオンさせる。それにより、モータ14の回転が中止されるとともに、ネジの締付トルクが第3トルクR3に到達したことが作業者に報知される。作業者は、表示ランプ26の点灯を確認した後、トリガスイッチ24をオフ操作する(時刻t5)。制御回路28は、トリガスイッチ24のオフ操作を受けて、表示ランプ26を消灯する。以上により、締付工具10は、第3トルクR3に等しい締付トルクによってネジ類を締付けた後に、動作を終了する。先に説明したように、第3トルクR3の値は、調整部材68を操作することによって調整することができる。第3トルクR3の値を締付トルクの目標値に等しく設定しておくことによって、目標とする締付トルクによってネジを締付けることができる。また、第3トルクR3の値を調整することによって、第1トルクR2や第2トルクR2の値も併せて調整される。
なお、制御回路28がネジ類の締付けを完了したと判断する検出スイッチ52のオフ回数は、クラッチ機構20に設けられている係合突起部59a、59b、59cの種類数に対応している。そのことから、例えばクラッチ機構20に2種類の係合突起部に設けられている場合には、検出スイッチ52が2度目のオフ状態となった時点で、制御回路28がネジ類の締付けが完了したと判断することとなる。
【0023】
以上、本発明の実施形態について詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。
例えば、検出スイッチが、当接球体64が第3係合突起部59cを乗り越えたときのみを検出するようにしてもよい。この場合、例えば第3係合突起部59cの高さを、他の係合突起部59a、59bの高さと相違させ、当接球体64が第3係合突起部59cを乗り越えたときのみ、検出スイッチ52がオフするように構成することができる。
第1クラッチ部材56の第1対向面56aの構成と、第2クラッチ部材58の第2対向面56aの構成は、相互に反転させることができる。即ち、第1クラッチ部材56側に係合突起部59a、59b、59cを設け、第2クラッチ部材58側に当接球体64を保持させてもよい。当接球体64は、クラッチ部材56、58と一体に設けることもできる。
【0024】
本明細書または図面に説明した技術要素は、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時の請求項に記載の組合せに限定されるものではない。本明細書または図面に例示した技術は複数の目的を同時に達成するものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
【図面の簡単な説明】
【0025】
【図1】電動ドライバの構成を示す図。
【図2】減速機とクラッチ機構の構成を拡大して示す図。
【図3】第1クラッチ部材を第1対向面側から見た図。
【図4】第2クラッチ部材の第2対向面側から見た図。
【図5】図4のV線による断面を展開して示す図。
【図6】係合突起部群を拡大して示す図。
【図7】第1クラッチ部材と第2クラッチ部材が係合している状態を示す図。
【図8】第1クラッチ部材と第2クラッチ部材が係合解除された状態を示す図。
【図9】電動ドライバの電気構成を模式的に示す図。
【図10】電動ドライバの動作の流れを示すタイムチャート。
【符号の説明】
【0026】
10・・電動ドライバ
12・・ハウジング
14・・モータ
15・・スピンドル
16・・工具チャック
18、・・ドライバビット(工具)
20・・クラッチ機構
22・・減速機
24・・トリガスイッチ
26・・表示ランプ
28・・制御回路
30・・コネクタ
52・・検出スイッチ
56・・第1クラッチ部材
57・・凹部
58・・第2クラッチ部材
58b・・溝部
59a、59b、59c・・係合突起部群
61a、61b、61c・・当接斜面
62・・圧縮バネ
63・・接続球体
64・・当接球体
【技術分野】
【0001】
本発明は、ネジ類(ボルト、ナット、スクリュウ等)を締付ける締付工具に関する。特に、モータから工具へ伝達するトルクを制限するクラッチ機構を備える締付工具に関する。
【背景技術】
【0002】
モータから工具へ伝達するトルクを制限するクラッチ機構を備え、ネジ類を規定された締付トルクで締付ける締付工具が開発されている(例えば特許文献1)。クラッチ機構は、一対のクラッチ部材と、一対のクラッチ部材の一方を他方に押圧する付勢手段を用いて構成されている。一対のクラッチ部材は、一方がモータ側に接続されており、他方が工具側に接続されている。クラッチ機構では、一対のクラッチ部材が互いに係合することによってモータからのトルクが工具へ伝達され、一対のクラッチ部材の係合が解除されることによってモータから工具へのトルク伝達が遮断される。
一対のクラッチ部材には、係合部が形成されている。係合部は、工具に加えられているトルクが所定値未満のときには一対のクラッチ部材の係合を維持し、工具に加えられているトルクが所定値以上となると一対のクラッチ部材の係合を解除するように構成されている。
【特許文献1】実公昭50−33759号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
締付工具では、ネジ類を締付けている間、ネジ類から反力を受ける。作業者は、ネジ類から受ける反力に抗して、締付工具を支持する必要がある。
従来の締付工具では、ネジ類の頭部が母材に着座した時点から、締付トルクが所定値に到達する時点まで、ネジ類から受ける反力が急激に増大する。作業者は、急激に増大していく反力に抗して、締付工具を支持し続ける必要があり、比較的に大きな力を締付工具に加え続けなければならない。
本発明は、上記の問題を解決する。本発明は、ネジ類から受ける反力に抗して、作業者が支持しやすい締付工具を提供する。
【課題を解決するための手段】
【0004】
本発明によって具現化される締付工具は、モータと、ネジ類に係合する工具と、モータと工具との間に介装されており、互いに係合することによってモータからのトルクを工具へ伝達し、互いの係合を解除することによってモータから工具へのトルク伝達を遮断する一対のクラッチ部材と、一対のクラッチ部材の少なくとも一方を他方に押圧する付勢手段とを備えている。一対のクラッチ部材には、少なくとも第1係合部と第2係合部が設けられている。第1係合部は、工具に加えられているトルクが第1所定値未満のときには一対のクラッチ部材の係合を維持し、工具に加えられているトルクが第1所定値以上となると一対のクラッチ部材の係合を解除する。第2係合部は、工具に加えられているトルクが第1所定値よりも大きい第2所定値未満のときには一対のクラッチ部材の係合を維持し、工具に加えられているトルクが第2所定値以上となると一対のクラッチ部材の係合を解除する。一対のクラッチ部材は、第1係合部の係合が解除された後に、第2係合部が係合することを特徴とする。
【0005】
この締付工具では、一対のクラッチ部材が、先ず第1係合部によって係合される。一対のクラッチ部材は、ネジ類から工具に加えられているトルク(即ち、モータが現に加えているトルクであり、反力に等しい)が第1所定値に達するまで、係合した状態が維持される。そして、ネジ類から工具に加えられているトルクが第1所定値に達すると、一対のクラッチ部材の係合が解除される。一対のクラッチ部材の係合が解除されると、モータから工具へのトルク伝達が遮断される。その結果、締付工具がネジ類から受ける反力は、第1所定値に到達した時点で一旦低下する。
一対のクラッチ部材は、第1係合部による係合が解除されると、続いて第2係合部によって係合される。一対のクラッチ部材は、ネジ類から工具に加えられているトルクが第2所定値に達するまで、係合した状態が維持される。そして、ネジ類から工具に加えられているトルクが第2所定値に達すると、一対のクラッチ部材の係合が解除される。この段階で、ネジ類の締付トルクは第2所定値に達しており、締付工具がネジ類から受ける反力も第2所定値まで増大する。
この締付工具では、ネジ類を第2所定値の締付トルクによって締付ける際に、締付トルクが第1所定値に到達した時点で、一対のクラッチの係合が一旦解除される。それにより、締付工具がネジ類から受ける反力は、第1所定値に到達した時点で一旦低下し、その後に第2所定値まで増大する。締付工具がネジ類から受ける反力は、ネジ類が着座した時点で突然に増大するが、先ずは第1所定値に制限されることで、作業者は締付工具を無理なく支持し続けることができる。そして、締付工具がネジ類から受ける反力は、続いて第2所定値まで増大するが、作業者はその増大を予期することができるので、作業者は締付工具を無理なく支持し続けることができる。
【0006】
第1係合部と第2係合部のそれぞれには、他方のクラッチ部材と当接する傾斜面が形成されていることが好ましい。この場合、第1係合部の傾斜面よりも、第2係合部の傾斜面のほうが、傾斜角度が大きいことが好ましい。
各係合部に他方のクラッチ部材と当接する傾斜面を形成すると、前記した第1所定値や第2所定値は、傾斜面の傾斜角度によって調整することが可能となる。このとき、第1係合部の傾斜面のよりも、第2係合部の傾斜面の方が、傾斜角度が大きくなるように形成することによって、第1所定値よりも第2所定値の方が大きくなるように定めることができる。
【0007】
上記の締付工具では、一対のクラッチ部材の第2係合部の係合が解除された時に、モータの駆動を中止させるモータ制御手段が付加されていることが好ましい。
それにより、ネジ類の締付トルクが第2所定値に到達した時点で、モータの動作を中止させることができる。
【0008】
モータ制御手段は、一対のクラッチ部材の係合が所定回数に亘って解除された時に、モータの駆動を中止させることが好ましい。
上記した締付工具では、ネジ類の締付トルクが第2所定値に到達するまでに、一対のクラッチ部材が複数回に亘って係合解除される。そのことから、一対のクラッチ部材が係合解除された回数を計数し、その回数が所定回数に到達した時点でモータの駆動を中止させることによって、ネジ類の締付トルクが規定されたトルクに到達した時点で、モータの動作を中止させることができる。
【発明の効果】
【0009】
本発明によると、締付工具がネジ類から受ける反力に抗して作業者が支持しやすい締付工具を具現化することができる。
【発明を実施するための最良の形態】
【0010】
最初に、以下に説明する実施例の主要な特徴を列記する。
(形態1) 締付工具は、第1クラッチ部材と第2クラッチ部材を備えている。第1クラッチ部材はモータ側に接続されており、第2クラッチ部材は工具側に接続されている。
(形態2) 第1クラッチ部材と第2クラッチ部材の一方には、第1係合部と第2係合部と第3係合部が設けられている。第1クラッチ部材と第2クラッチ部材の他方には、第1係合部と第2係合部と第3係合部に当接する当接部が設けられている。当接部は、第1クラッチ部材と第2クラッチ部材との相対回転位置に応じて、第1係合部と第2係合部と第3係合部のいずれかに当接する。
(形態3) 締付工具は、一対のクラッチ部材の係合が解除されたことを検出する手段を備えている。
【実施例】
【0011】
図1は、実施例1の電動ドライバ10の内部構成を示している。図1に示すように、電動ドライバ10は、ハウジング12と、ハウジングに内蔵されているモータ14と、ハウジング12に対して回転可能に支持されている工具チャック16と、ハウジング12に対して回転可能に支持されているスピンドル15と、モータ14の回転トルクをスピンドル15に伝達する減速機22およびクラッチ機構20を備えている。工具チャック16は、スピンドル15に対して固定されている。工具チャック16は、ネジ類(ボルト、ナット、スクリュウ等)に係合する工具(例えばドライバビット)18を着脱可能に構成されている。電動ドライバ10は、モータ14を回転させることによって、工具チャック16に装着されたドライバビット18を回転させる。
電動ドライバ10は、作業者が操作するトリガスイッチ24と、作業者に視認可能に設けられている表示ランプ26と、モータ14や表示ランプ26等の動作を制御する制御回路28と、電源となる電池パック(図9に示す)100を接続するためのコネクタ30を備えている。
【0012】
図2は、電動ドライバ10の減速機22およびクラッチ機構20を拡大して示している。図2に示すように、減速機22は、第1太陽ギヤ32と、3つの第1衛星ギヤ34(一部は図示省略)と、内歯ギヤ36と、第2太陽ギヤ38と、3つの第2衛星ギヤ(一部は図示省略)40と、出力部材42を備えている。第1太陽ギヤ32は、モータ14の出力軸14aに固定されている。第1衛星ギヤ34は、第1太陽ギヤ32と内歯ギヤ36の両者に噛合しており、第1太陽ギヤ32の回転を受けて自転しながら第1太陽ギヤ32の周囲を公転する。第2太陽ギヤ38には、第1衛星ギヤ34の自転軸35が固定されており、第1衛星ギヤ34の公転運動に従動して回転するようになっている。第2衛星ギヤ40は、第2太陽ギヤ38と内歯ギヤ36の両者に噛合しており、第2太陽ギヤ38の回転を受けて自転しながら第2太陽ギヤ38の周囲を公転する。出力部材42には、第2衛星ギヤ40の自転軸41が固定されており、第2衛星ギヤ40の公転運動に従動して回転する。このように、減速機22は、2段階に設けられた遊星ギヤ構造を備えており、モータ14の回転運動を所定の減速比で減速し、出力部材42の回転運動に出力する。即ち、出力部材42の回転トルクは、モータ14の回転トルクに対して、その減速比の逆数倍に増幅される。
【0013】
クラッチ機構20は、第1クラッチ部材56と、第2クラッチ部材58と、3つの当接球体64(一部図示省略)と、圧縮バネ62と、3つの接続球体63(一部図示省略)と、バネ拘束部材66と、調整部材68を備えている。
第1クラッチ部材56は、減速機22の出力部材42に固定されており、モータ14の回転に伴って出力部材42とともに回転する。一方、第2クラッチ部材58は、スピンドル15に設けられている。第2クラッチ部材58は、接続球体63を介してスピンドル15に接続されており、スピンドル15に対して相対回転不能に接続されているとともに、スピンドル15の軸方向には移動可能に支持されている。
第1クラッチ部材56には、第1対向面56aが形成されている。第2クラッチ部材58には、第2対向面58aが形成されている。第1クラッチ部材56の第1対向面56aと第2クラッチ部材58の第2対向面58aは、互いに対向している。当接球体64は、第1クラッチ部材56の第1対向面56aと第2クラッチ部材58の第2対向面58aとの間に介在している。圧縮バネ62は、第2クラッチ部材58を第1クラッチ部材56に向けて付勢している。第1クラッチ部材56と第2クラッチ部材58は、当接球体64を介して回転方向に関して係合する。第1クラッチ部材56と第2クラッチ部材58は、互いに係合することによってモータ14からのトルクをスピンドル15側へと伝達し、互いの係合を解除することによってモータ14からスピンドル15へのトルク伝達を遮断する。
バネ拘束部材66は、圧縮バネ62の反第2クラッチ部材58側の端部を拘束している。調整部材68は、スピンドル15の側面に螺合しており、回転することによってスピンドル15の軸方向に移動する。調整部材68がスピンドル15の軸方向に沿って移動することによって、バネ拘束部材66もスピンドル15の軸方向に沿って移動する。作業者は、調整部材68を回転させることによって、圧縮バネ62が第2クラッチ部材58を第1クラッチ部材56側へと押圧する押圧力を調整することができる。
【0014】
図2に示すように、電動ドライバ10は、第2クラッチ部材58の移動に伴って移動する連動部材54と、連動部材54の移動に伴ってオン/オフする検出スイッチ52と、連動部材54を検出スイッチ52側に向けて付勢している付勢バネ60を備えている。第2クラッチ部材58が第1クラッチ部材56側に位置している状態では、連動部材54は付勢バネ60による付勢力を受けて検出スイッチ52側に位置している。このとき、検出スイッチ52はオン状態となる。即ち、第1クラッチ部材56と第2クラッチ部材58が係合している間、検出スイッチ52はオン状態となる。一方、第2クラッチ部材58が第1クラッチ部材56から離間する方向に移動すると、連動部材54も検出スイッチ52から離間する方向に移動する。このとき、検出スイッチ52はオフ状態となる。即ち、第1クラッチ部材56と第2クラッチ部材58の係合が解除されている状態では、検出スイッチ52はオフ状態となる。
【0015】
次に、第1クラッチ部材56の第1対向面56aと第2クラッチ部材58の第2対向面58aについて説明する。
図3は、第1対向面56a側からみた第1クラッチ部材56を示している。図3に示すように、第1クラッチ部材56の第1対向面56aには、当接球体64が遊嵌するための凹部57が3箇所に形成されている。凹部57は、略半球形状に形成されている。3箇所の凹部57は、周方向に沿って等間隔に配置されている。当接球体64は、第1クラッチ部材56の凹部57によって保持され、第1クラッチ部材56と略一体となって回転する。そのことから、当接球体64は第1クラッチ部材56の一部とみなすこともでき、第1クラッチ部材56と当接球体64を一体に形成するようにしてもよい。
図4は、第2対向面58a側からみた第2クラッチ部材58を示している。図5は、図4に示す円形切断線Vにおける断面を展開して示している。図4、図5に示すように、第2クラッチ部材58の第2対向面58aには、周方向に沿って伸びている溝部58bが形成されている。溝部58bは、第1クラッチ部材56の凹部57と対向する位置に設けられている。溝部58bには、第1係合突起部59aと第2係合突起部59bと第3係合突起部59cとを一組とする係合突起部群59a、59b、59cが3組形成されている。3組の係合突起部群59a、59b、59cは、周方向に沿って等間隔に配置されている。
図6は、一組の係合突起部群59a、59b、59cを拡大して示している。図6に示すように、一組の係合突起部群59a、59b、59cでは、第2クラッチ部材58に対して第1クラッチ部材56が相対回転する方向に沿って、第1係合突起部59a、第2係合突起部59b、第3係合突起部59cの順に配置されている。
各係合突起部59a、59b、59cには、当接斜面61a、61b、61cが形成されている。当接斜面61a、61b、61cには、第1クラッチ部材56がモータ14によって回転させられたときに、第1クラッチ部材56側に保持されている当接球体64が当接する。第1係合突起部59aでは、第1当接斜面61aが傾斜角度θ1で形成されている。第2係合突起部59bでは、第2当接斜面61bが傾斜角度θ2で形成されている。第3係合突起部59cでは、第3当接斜面61cが傾斜角度θ3で形成されている。そして、傾斜角度θ1、θ2、θ3の大小関係は、θ1<θ2<θ3となっている。
【0016】
図7、図8を参照して、クラッチ機構20の動作について説明する。図7、図8は、第1クラッチ部材56と第2クラッチ部材58を周方向に展開して示している。図7に示すように、モータ14によって第1クラッチ部材56が回転させられると、第1クラッチ部材56の凹部57に遊嵌している当接球体64が、第2クラッチ部材58の第1係合突起部59aの第1当接斜面61aに当接する。当接球体64は第1係合突起部59aを乗り越えようとするが、圧縮バネ62による付勢力によって、当接球体64が第1係合突起部59aを乗り越えることが抑止される。第1クラッチ部材56と第2クラッチ部材58は回転方向に関して係合した状態となり、両者は一体となって回転する。それにより、モータ14の出力するトルクは、クラッチ機構20を介してスピンドル15へと伝達される。このとき、検出スイッチ52はオン状態となる。
一方、図8に示すように、スピンドル15に回転を規制するトルクを加えると、圧縮バネ62の付勢力に逆らって、当接球体64は第1係合突起部59aを乗り越える。このとき、第1クラッチ部材56と第2クラッチ部材58は回転方向に関して係合解除され、モータ14からスピンドル15へのトルク伝達が遮断される。即ち、電動ドライバ10によってネジを締付けたときに、その締付トルクが第1の所定値(例えばR1)に達すると、第1クラッチ部材56と第2クラッチ部材58間のトルク伝達が遮断される。このときの第1トルクR1は、主に、圧縮バネ62による付勢力と、第1当接斜面61aの傾斜角度θ1に応じて決まる。第1当接斜面61aの傾斜角度θ1が大きいほど、第1トルクR1は大きくなる。
【0017】
当接球体64が第1係合突起部59aを乗り越えると、第1クラッチ部材56は第2クラッチ部材58に対して相対回転し、当接球体64は第2係合突起部59bの第2当接斜面61bに当接する。それにより、第1クラッチ部材56と第2クラッチ部材58は、回転方向に関して再び係合する。そして、ネジ類に加えている締付トルクが第2の所定値(例えばR2)となると、当接球体64は第2係合突起部59bを乗り越える。当接球体64が第2係合突起部59bを乗り越えることによって、第1クラッチ部材56と第2クラッチ部材58間のトルク伝達は再び遮断される。このときの第2トルクR2は、主に、圧縮バネ62による付勢力と、第2当接斜面61bの傾斜角度θ2に応じて決まる。第2当接斜面61bの傾斜角度θ2は、第1当接斜面61aの傾斜角度θ1よりも大きいことから、第2トルクR2は第1トルクR1よりも大きくなる。
【0018】
当接球体64が第2係合突起部59bを乗り越えると、第1クラッチ部材56は第2クラッチ部材58に対して相対回転し、当接球体64が第3係合突起部59cの第3当接斜面61cに当接する。それにより、第1クラッチ部材56と第2クラッチ部材58は、回転方向に関して再び係合する。そして、ネジ類に加えている締付トルクが第3の所定値(例えばR3)となると、当接球体64は第3係合突起部59cを乗り越える。当接球体64が第3係合突起部59cを乗り越えることによって、第1クラッチ部材56と第2クラッチ部材58間のトルク伝達は再び遮断される。このときの第3トルクR3は、主に、圧縮バネ62による付勢力と、第3当接斜面61cの傾斜角度θ3に応じて決まる。第3当接斜面61cの傾斜角度θ3は、第2当接斜面61bの傾斜角度θ2よりも大きいことから、第3トルクR3は第2トルクR2よりも大きくなる。即ち、第1トルクR1<第2トルクR2<第3トルクR3の関係となっている。
当接球体64は、第3係合突起部59bcを乗り越えると、第1係合突起部59aの第1当接斜面61aに再び当接し、クラッチ機構20は図7に示す状態に戻る。
このように、クラッチ機構20では、ネジ類に加えているトルクが第1トルクR1となった時点で一時的にトルク伝達が遮断され、次いで、ネジ類に加えているトルクが第2トルクR2となった時点で一時的にトルク伝達が遮断され、次いで、ネジ類に加えている締付トルクが第3トルクR3となった時点でトルク伝達が遮断される。
【0019】
図9は、電動ドライバ10の回路構成を模式的に示している。図9に示すように、電動ドライバ10では、コネクタ30に接続された電池パック100から、モータ14に電力が供給されるとともに、制御回路28に電力が供給される。モータ14をコネクタ30を介して電池パック100に接続する回路上には、半導体スイッチ80が介挿されている。半導体スイッチ80は、制御回路28から出力される駆動信号によって、オン状態とオフ状態が切換えられる。
制御回路28は、マイクロコンピュータや定電圧電源回路等を備えている。制御回路28には、トリガスイッチ24や検出スイッチ52や表示ランプ26が接続されている。制御回路28は、トリガスイッチ24の出力信号と、検出スイッチ52の出力信号に基づいて、半導体スイッチ80や表示ランプ26の動作を制御する。
【0020】
図10は、電動ドライバ10の各部の動作を経時的に示すタイムチャートである。図10を参照して、制御回路28の動作等について説明する。図10中の(A)はトリガスイッチ24のオン/オフ状態を示している。(B)は半導体スイッチ80のオン/オフ状態を示している。(C)はドライバビット18がネジ類から受ける反力トルクを示している。ドライバビット18がネジ類から受ける反力トルクは、ドライバビット18がネジ類に加えているトルクに略等しい。(D)は検出スイッチ52のオン/オフ状態を示している。(E)は表示ランプ26のオン/オフ状態を示している。
先ず、作業者は、ドライバビット18をネジに係合させ、トリガスイッチ24をオン操作する。この時点を時刻t1とする。時刻t1においてトリガスイッチ24にオン操作が加えられると、制御回路28は半導体スイッチ80に駆動信号を出力し、半導体スイッチ80をオンさせる。半導体スイッチ80がオンすることによって、モータ14が電池パック100(詳しくは電池パックに内蔵されている電池)に電気的に接続され、モータ14が回転を開始する。クラッチ機構20では、第1クラッチ部材56側に保持されている当接球体64が、第2クラッチ部材58側に設けられている第1係合突起部59aの第1当接斜面61aに当接し、モータ14からのトルクがスピンドル15側へと伝達される。モータ14によってドライバビット18は回転させられることとなり、ネジ類は母材へとねじ込まれていく。なお、作業者がトリガスイッチ24のオン操作を中止すると、制御回路28は半導体スイッチ80へ駆動信号の出力を中止し、モータ14は停止する。ここでは、後述する時刻t5まで、作業者がトリガスイッチ24のオン操作を継続するものとする。
【0021】
図10の(C)に示すように、ドライバビット18がネジ類から受ける反力トルクは、ネジの頭部が着座するまでは比較的に小さな値で推移し、ネジ類の頭部が着座した時点(図中のX)から急速に増大する。時刻t2において、ドライバビット18がネジから受ける反力トルク、即ち、ネジに加えている締付トルクが第1トルクR1に到達すると、当接球体64が第1係合突起部59aを乗り越え、第1クラッチ部材56と第2クラッチ部材58との間のトルク伝達が遮断される。第1係合突起部59aを乗り越えた当接球体64は、続いて第2係合突起部59bの第2当接斜面61bに当接する。それにより、第1クラッチ部材56と第2クラッチ部材58とは再び係合し、モータ14の出力するトルクがスピンドル15側へと伝達される。
時刻t3において、ドライバビット18がネジから受ける反力トルク、即ち、ネジの締付トルクが第2トルクR2に到達すると、当接球体64が第2係合突起部59bを乗り越え、第1クラッチ部材56と第2クラッチ部材58との間のトルク伝達が遮断される。第2係合突起部59bを乗り越えた当接球体64は、続いて第3係合突起部59cの第3当接斜面61cに当接する。それにより、第1クラッチ部材56と第2クラッチ部材58とは再び係合し、モータ14の出力するトルクがスピンドル15側へと伝達される。
時刻t4において、ドライバビット18がネジから受ける反力トルク、即ち、ネジの締付トルクが第3トルクR3に到達すると、当接球体64が第3係合突起部59cを乗り越え、第1クラッチ部材56と第2クラッチ部材58との間のトルク伝達が遮断される。
このように、クラッチ機構20では、ネジ類の締付トルクが第1トルクR1に達した時点と、ネジ類の締付トルクが第2トルクR2に達した時点と、ネジ類の締付トルクが第3トルクR3に達した時点の3回に亘って、トルク伝達が一時的に遮断される。電動ドライバ10がネジ類から受ける反力トルクは、ネジ類が着座した時点で突然に増大するが、先ずは第1トルクR1に制限されることで、作業者は締付工具を無理なく支持し続けることができる。電動ドライバ10がネジ類から受ける反力は、続いて第1トルクR1よりも大きい第2トルクR2まで増大するが、作業者はその増大を予期することができるので、作業者は締付工具を無理なく支持し続けることができる。そして、電動ドライバ10がネジ類から受ける反力は、続いて第2トルクR2よりも大きい第3トルクR3まで増大するが、作業者はその増大を予期することができるので、作業者は締付工具を無理なく支持し続けることができる。作業者は、ネジ類から受ける反力トルクに抗して、電動ドライバ10を無理なく支持し続けることができる。
【0022】
図10の(D)に示すように、検出スイッチ52は、クラッチ機構20がトルク伝達を遮断する時点(時刻t2、t3、t4)において一時的にオフ状態となる。検出スイッチ52が1度目のオフ状態となった時点(時刻t2)は、ネジ類の締付トルクが第1トルクR1に到達した時点に対応する。検出スイッチ52が2度目のオフ状態となった時点(時刻t3)は、ネジ類の締付トルクが第2トルクR2に到達した時点に対応する。検出スイッチ52が3度目のオフ状態となった時点(時刻t4)は、ネジ類の締付トルクが第3トルクR3に到達した時点を示す。制御回路28は、検出スイッチ52がオフ状態となった回数を計数しており、検出スイッチ52が3度目のオフ状態となったときに、図10の(B)に示すように半導体スイッチ80をオフするとともに、図10(E)に示すように表示ランプをオンさせる。それにより、モータ14の回転が中止されるとともに、ネジの締付トルクが第3トルクR3に到達したことが作業者に報知される。作業者は、表示ランプ26の点灯を確認した後、トリガスイッチ24をオフ操作する(時刻t5)。制御回路28は、トリガスイッチ24のオフ操作を受けて、表示ランプ26を消灯する。以上により、締付工具10は、第3トルクR3に等しい締付トルクによってネジ類を締付けた後に、動作を終了する。先に説明したように、第3トルクR3の値は、調整部材68を操作することによって調整することができる。第3トルクR3の値を締付トルクの目標値に等しく設定しておくことによって、目標とする締付トルクによってネジを締付けることができる。また、第3トルクR3の値を調整することによって、第1トルクR2や第2トルクR2の値も併せて調整される。
なお、制御回路28がネジ類の締付けを完了したと判断する検出スイッチ52のオフ回数は、クラッチ機構20に設けられている係合突起部59a、59b、59cの種類数に対応している。そのことから、例えばクラッチ機構20に2種類の係合突起部に設けられている場合には、検出スイッチ52が2度目のオフ状態となった時点で、制御回路28がネジ類の締付けが完了したと判断することとなる。
【0023】
以上、本発明の実施形態について詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。
例えば、検出スイッチが、当接球体64が第3係合突起部59cを乗り越えたときのみを検出するようにしてもよい。この場合、例えば第3係合突起部59cの高さを、他の係合突起部59a、59bの高さと相違させ、当接球体64が第3係合突起部59cを乗り越えたときのみ、検出スイッチ52がオフするように構成することができる。
第1クラッチ部材56の第1対向面56aの構成と、第2クラッチ部材58の第2対向面56aの構成は、相互に反転させることができる。即ち、第1クラッチ部材56側に係合突起部59a、59b、59cを設け、第2クラッチ部材58側に当接球体64を保持させてもよい。当接球体64は、クラッチ部材56、58と一体に設けることもできる。
【0024】
本明細書または図面に説明した技術要素は、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時の請求項に記載の組合せに限定されるものではない。本明細書または図面に例示した技術は複数の目的を同時に達成するものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
【図面の簡単な説明】
【0025】
【図1】電動ドライバの構成を示す図。
【図2】減速機とクラッチ機構の構成を拡大して示す図。
【図3】第1クラッチ部材を第1対向面側から見た図。
【図4】第2クラッチ部材の第2対向面側から見た図。
【図5】図4のV線による断面を展開して示す図。
【図6】係合突起部群を拡大して示す図。
【図7】第1クラッチ部材と第2クラッチ部材が係合している状態を示す図。
【図8】第1クラッチ部材と第2クラッチ部材が係合解除された状態を示す図。
【図9】電動ドライバの電気構成を模式的に示す図。
【図10】電動ドライバの動作の流れを示すタイムチャート。
【符号の説明】
【0026】
10・・電動ドライバ
12・・ハウジング
14・・モータ
15・・スピンドル
16・・工具チャック
18、・・ドライバビット(工具)
20・・クラッチ機構
22・・減速機
24・・トリガスイッチ
26・・表示ランプ
28・・制御回路
30・・コネクタ
52・・検出スイッチ
56・・第1クラッチ部材
57・・凹部
58・・第2クラッチ部材
58b・・溝部
59a、59b、59c・・係合突起部群
61a、61b、61c・・当接斜面
62・・圧縮バネ
63・・接続球体
64・・当接球体
【特許請求の範囲】
【請求項1】
モータと、
ネジ類に係合する工具と、
モータと工具との間に介装されており、互いに係合することによってモータからのトルクを工具へ伝達し、互いの係合を解除することによってモータから工具へのトルク伝達を遮断する一対のクラッチ部材と、
一対のクラッチ部材の少なくとも一方を他方に押圧する付勢手段とを備え、
一対のクラッチ部材には、少なくとも第1係合部と第2係合部が設けられており、
第1係合部は、工具に加えられているトルクが第1所定値未満のときには一対のクラッチ部材の係合を維持し、工具に加えられているトルクが第1所定値以上となると一対のクラッチ部材の係合を解除し、
第2係合部は、工具に加えられているトルクが第1所定値よりも大きい第2所定値未満のときには一対のクラッチ部材の係合を維持し、工具に加えられているトルクが第2所定値以上となると一対のクラッチ部材の係合を解除し、
一対のクラッチ部材は、第1係合部の係合が解除された後に、第2係合部が係合することを特徴とする締付工具。
【請求項2】
前記第1係合部と第2係合部のそれぞれには、他方のクラッチ部材と当接する傾斜面が形成されており、
第1係合部の傾斜面よりも、第2係合部の傾斜面のほうが、傾斜角度が大きいことを特徴とする請求項1の締付工具。
【請求項3】
前記一対のクラッチ部材の前記第2係合部の係合が解除された時に、前記モータの駆動を中止させるモータ制御手段が付加されていることを特徴とする請求項1又は2の締付工具。
【請求項4】
前記モータ制御手段は、前記一対のクラッチ部材の係合が所定回数に亘って解除された時に、前記モータの駆動を中止させることを特徴とする請求項3の締付工具。
【請求項1】
モータと、
ネジ類に係合する工具と、
モータと工具との間に介装されており、互いに係合することによってモータからのトルクを工具へ伝達し、互いの係合を解除することによってモータから工具へのトルク伝達を遮断する一対のクラッチ部材と、
一対のクラッチ部材の少なくとも一方を他方に押圧する付勢手段とを備え、
一対のクラッチ部材には、少なくとも第1係合部と第2係合部が設けられており、
第1係合部は、工具に加えられているトルクが第1所定値未満のときには一対のクラッチ部材の係合を維持し、工具に加えられているトルクが第1所定値以上となると一対のクラッチ部材の係合を解除し、
第2係合部は、工具に加えられているトルクが第1所定値よりも大きい第2所定値未満のときには一対のクラッチ部材の係合を維持し、工具に加えられているトルクが第2所定値以上となると一対のクラッチ部材の係合を解除し、
一対のクラッチ部材は、第1係合部の係合が解除された後に、第2係合部が係合することを特徴とする締付工具。
【請求項2】
前記第1係合部と第2係合部のそれぞれには、他方のクラッチ部材と当接する傾斜面が形成されており、
第1係合部の傾斜面よりも、第2係合部の傾斜面のほうが、傾斜角度が大きいことを特徴とする請求項1の締付工具。
【請求項3】
前記一対のクラッチ部材の前記第2係合部の係合が解除された時に、前記モータの駆動を中止させるモータ制御手段が付加されていることを特徴とする請求項1又は2の締付工具。
【請求項4】
前記モータ制御手段は、前記一対のクラッチ部材の係合が所定回数に亘って解除された時に、前記モータの駆動を中止させることを特徴とする請求項3の締付工具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−210059(P2007−210059A)
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願番号】特願2006−31427(P2006−31427)
【出願日】平成18年2月8日(2006.2.8)
【出願人】(000137292)株式会社マキタ (1,210)
【Fターム(参考)】
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願日】平成18年2月8日(2006.2.8)
【出願人】(000137292)株式会社マキタ (1,210)
【Fターム(参考)】
[ Back to top ]