
編成搬送台車設備
【課題】複数の独立換向式の車輪装置を有する複数の台車を使用して、大型の運搬物を運搬する。
【解決手段】複数台のうち1台をマスタ台車(MC)とし、残りをスレイブ台車(SC)とし、マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から台車群の編成旋回中心を求め、この編成旋回中心から各車輪装置の編成スレイブ軸目標舵角を演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)とを設け、スレイブ台車(SC)に車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、マスタ台車(MC)からスレイブ台車(SC)の舵角指令部(M20B)に編成目標舵角を送信する伝送ケーブル(43A)を設けた。
【解決手段】複数台のうち1台をマスタ台車(MC)とし、残りをスレイブ台車(SC)とし、マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から台車群の編成旋回中心を求め、この編成旋回中心から各車輪装置の編成スレイブ軸目標舵角を演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)とを設け、スレイブ台車(SC)に車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、マスタ台車(MC)からスレイブ台車(SC)の舵角指令部(M20B)に編成目標舵角を送信する伝送ケーブル(43A)を設けた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、1台の台車で搬送できない船殻ブロックなどのような大型の運搬物を、複数の台車により運搬する編成搬送台車設備に関する。
【背景技術】
【0002】
船殻ブロックなどのような大型の運搬物は、1台の台車で搬送できないため、複数の台車を所定位置に配置した台車群に積載し、運搬することがある。
従来技術として、たとえば特許文献1および2に示すように、牽引車の後部に台車をリンクまたはヒンジ付きロッドを介して連結するものがあるが、この場合、コーナー部などの搬送中に、運搬物に対する台車の姿勢がそれぞれ変化するため、運搬物を鉛直軸心周りに回転自在に支持する特殊な治具を使用しない限り、大型の運搬物の運搬は困難である。また大型の搬送物を運搬する機会はそう多くなく、このために、特別に大型の搬送台車を新たに製造するのはコストがかかりすぎる。
【0003】
大型の運搬物を複数の搬送台車に積載して運搬する技術を開示した従来文献は見当たらない。
【特許文献1】特開2006−224803
【特許文献2】特開2004−195997
【特許文献3】特開2001−328555
【発明の開示】
【発明が解決しようとする課題】
【0004】
そこで、本出願人は、特許文献3において、運転席の操舵装置により車輪の舵角がそれぞれ操作される複数の独立換向式の車輪装置を有する搬送台車を提案しており、このような搬送台車を複数台使用して大型の運搬物を運搬することが考えられる。
【0005】
本発明は、複数の独立換向式の車輪装置を有する複数の自走式の台車を使用して、大型の運搬物をスムーズに運搬することができる編成搬送台車設備を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1記載の発明は、複数の独立換向式の車輪装置(MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4)と、操舵装置(M3,S3)により操作された操舵角に基づいて車輪装置の目標舵角を演算する運転制御部(M20A,S20A)、および前記目標舵角に基づいて舵角指令を前記車輪装置にそれぞれ出力して操舵する舵角指令部(M20B,S20B)を有する操舵コントローラ(M20,S20)とを具備した複数の台車により台車群を形成し、当該台車群により型の運搬物を積載して運搬する編成搬送台車設備であって、複数の台車のうち、1台を主動走行するマスタ台車(MC)とするとともに、残りをマスタ台車(MC)に従動走行するスレイブ台車(SC)とし、マスタ台車の操舵コントローラ(M20)に、台車群の台車の配置を示す編成運転モードと台車群の走行方向を示す走行モードとを判断する編成モード判断部(32M)と、編成モード判断部(32M)の信号に基づいて、操舵装置(M3,S3)により操作された操舵角から編成旋回中心(OS1〜OS6)を求め、当該編成旋回中心からマスタ台車およびスレイブ台車の各車輪装置の編成スレイブ軸目標舵角をそれぞれ演算する編成運転制御部(20C)とを設け、マスタ台車からスレイブ台車の操舵コントローラ(S20)に、編成スレイブ軸目標舵角を送信するステアリング伝送手段(41A〜41C,42,43A〜43C)を設け、スレイブ台車の操舵コントローラ(S20)は、前記編成運転制御部から前記ステアリング伝送手段を介して舵角指令部(S20B)に入力された編成スレイブ軸目標舵角に基づいて、車輪装置をそれぞれ操舵するように構成されたものである。
【0007】
請求項2記載の発明は、請求項1記載の構成において、ステアリング伝送手段は、マスタ台車(MC)に配置された複数のマスタ側コネクタ(41A〜41C)と、スレイブ台車(SC)に配置されたスレイブ側コレクタ(42)と、マスタ側コネクタ(41A〜41C)とスレイブ側コレクタ(42)とを接続する伝送ケーブル(43A〜43C)とを具備し、伝送ケーブル(43A〜43C)が接続されたマスタ側コネクタ(41A〜41C)を検出する編成状態検出器(31)を設け、編成モード判断部(32M)は、編成状態検出器の検出信号に基づいて、単独運転か編成運転かを判断するとともに編成運転モードを判断するように構成されたものである。
【0008】
請求項3記載の発明は、請求項1または2記載の構成において、編成運転モードは、少なくとも、マスタ台車(MC)に対してスレイブ台車(SC)が縦列位置に配置される縦列編成モードと、マスタ台車(MC)に対してスレイブ台車(SC)が並列位置に配置される並列編成モードと、マスタ台車(MS)に対してスレイブ台車(SC)が縦列位置と並列位置と対角位置とにそれぞれ配置される複合編成モードとを具備したものである。
【0009】
なお、括弧内の符号は、実施の形態に対応する符号で、参考のために付したものである。なお、重複する符号は省略している。
【発明の効果】
【0010】
請求項1記載の発明によれば、複数の独立換向式の車輪装置を具備した複数の台車を所定位置に配置し、マスタ台車の操舵コントローラに、編成モード判断部と編成運転制御部とを設けて、マスタ台車とスレイブ台車の車輪装置の編成スレイブ軸目標舵角を演算し、編成運転制御部からステアリング伝送手段を介してスレイブ台車の舵角指令部に編成スレイブ軸目標舵角を送信し、スレイブ台車の各車輪装置をそれぞれ操舵するように構成したので、マスタ台車の編成運転制御部により、マスタ台車とスレイブ台車の各車輪装置をステアリングして、台車群を一体に直進や旋回、横行走行させることができ、大型の運搬物をスムーズに運搬することができる。
【0011】
請求項2記載の発明によれば、編成状態検出器により、マスタ台車に配置されたマスタ側コネクタに対する伝送ケーブルの接続状態を検出して、編成モード判断部により編成運転モードを判断することができるので、編成運転モードの台車や車輪装置の位置データなどに基づいて編成搬送のステアリング制御、自動的に迅速に行うことができる。
【0012】
請求項3記載の発明によれば、少なくとも縦列編成モード、並列編成モードおよび複合編成モードを自動的に選択して、大型の運搬物を自動的に搬送することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態を図面に基づいて説明する。
[実施の形態1]
[台車の基本構造]
まず、編成搬送の基本となる単独運転用の台車を図10〜図13を参照して説明する。
【0014】
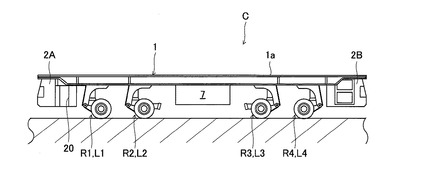
図10に示すように、単独運転用の台車Cは、上面に運搬物を積載する荷台面1aが形成された台車本体1の下面で前後位置に、前部運転席2Aおよび後部運転席2Bがそれぞれ設けられ、下面中央部にエンジン7が配置されている。また台車本体1の底面部には、複数組、たとえば左右一対で前後に4組、合計8個の独立換向式の車輪装置R1〜R4,L1〜L4が設けられており、運転席2A,2Bにそれぞれ設けられた操舵装置であるステアリングホイール3(図12)により、操舵コントローラ20を介して各車輪装置R1〜R4,L1〜L4を操舵するように構成されている。
【0015】
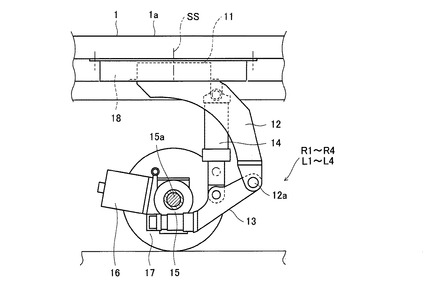
各車輪装置R1〜R4,L1〜L4は、図11に示すように、台車本体1にスレイブ軸SSを中心に旋回自在に支持された旋回体11と、この旋回体11から斜め下方に伸びる上アーム部12の下端部に水平ピン12aを介して上下揺動自在に支持された下アーム部13と、旋回体11と下アーム部13と間に連結されたサスペンションシリンダ14と、下アーム部13の下端部に設けられた車軸部15に回転軸15aを介して回転自在に支持されるとともに駆動モータ16により回転駆動される複数の車輪17と、台車本体1に設けられて旋回体11を介して車輪17をスレイブ軸SS周りに転舵する操舵駆動装置18とで構成され、前記操舵駆動装置18は、旋回駆動装置である油圧式ステアリングモータ18a(図12)により減速用のギヤ装置を介して旋回体11を回転させるように構成されている。また図12に示すように、各車輪装置R1〜R4,L1〜L4には、車輪17の実舵角を検出する舵角検出器19がそれぞれ設けられている。
【0016】
そして前部および後部の運転席2A,2Bには、ステアリングホイール4の他に、運転席2A,2Bを設定する運転席選択スイッチ5、走行モード選択レバー6、シフトレバーおよび操作パネルなどが具備されている。
【0017】
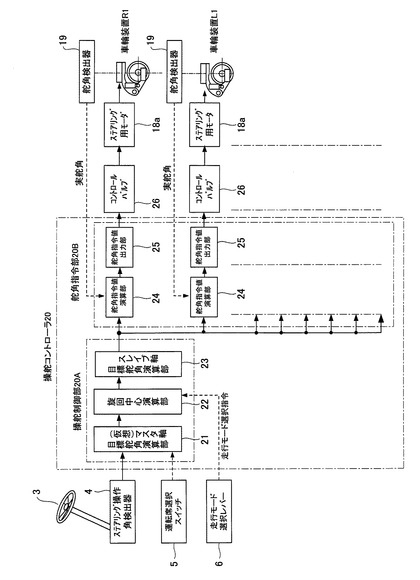
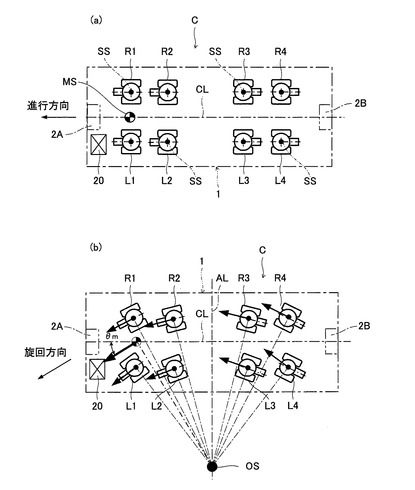
この単独運転用の台車Cの操舵コントローラ20を図12、図13を参照して説明する。マイクロコンピュータからなる操舵コントローラ20は、車輪装置R1〜R4,L1〜L4のスレイブ軸目標舵角(目標舵角)を求める操舵制御部20Aと、車輪装置R1〜R4,L1〜L4ごとに設けられてステアリング指令(舵角指令値)を各車輪装置R1〜R4,L1〜L4に出力する舵角指令部20Bとを具備している。そして、たとえば運転席選択スイッチ5により前部運転席2Aが選択され、かつ走行モード切替レバー6により全輪換向方式による直進走行モードが選択された場合、台車本体1の幅方向の中心を通る車体中心軸CL上で進行方向の最前列の車輪装置R1,L1(または最後列の車輪装置R4,L4)間に、(仮想の)マスタ軸MSが設定される。このマスタ軸MSは、台車本体1の旋回中心OSを求める際の基準となるものである。
【0018】
操舵制御部20Aにおいて、マスタ軸目標舵角演算部21では、前部運転席12Aのステアリング操舵角検出器4により検出されたステアリング操舵角に基づいて、マスタ軸MSにおけるマスタ軸目標舵角θmを演算する。そして旋回中心演算部22では、このマスタ軸目標舵角θmに基づいて台車本体1の旋回中心OSを求める。ここで、直進走行モードにおける旋回中心OSは、台車本体1の車体中心軸CLに、台車本体1の前後方向の中心位置で直交する中央横断軸AL上に設定される。さらにスレイブ軸目標舵角演算部23により、旋回中心OSと各車輪装置R1〜R4,L1〜L4のスレイブ軸SSまでの距離および角度に基づいてスレイブ軸目標舵角をそれぞれ演算する。
【0019】
舵角指令部20Bにおいて、舵角指令値演算部24では、前記スレイブ軸目標舵角と、各車輪装置R1〜R4,L1〜L4の舵角検出器19から出力される実舵角とに基づいて、車輪17を転舵させる舵角指令値を演算し、さらに舵角指令値出力部25では、舵角指令値に基づいて油圧式のステアリングモータ18aを介して車輪17を転舵させるバルブ操作指令値を求めて、コントロールバルブ26にそれぞれ出力し、ステアリングモータ18aを所定量回転駆動して各車輪装置R1〜R4,L1〜L4の車輪17をそれぞれ所定角度転舵させる。
【0020】
[編成搬送台車設備]
次に本発明に係る編成搬送台車設備を図1〜図8に基づいて説明する。
複数の台車Cを所定位置に配置して大型の運搬物を積載し搬送する編成搬送は、複数の台車Cのうち、1台を主動走行するマスタ台車MCとし、残りをマスタ台車MCに従動走行するスレイブ台車SCまたは第1〜第3スレイブ台車SC,SC1〜SC3とし、マスタ台車MCとスレイブ台車SC,SC1〜SC3とを連動させて一体に走行させるものである。
【0021】
ここで、マスタ台車MCとスレイブ台車S,SC1〜SC3において、単独運転用の台車Cと共通する部材の符号は、マスタ台車MCについては、符号の前にMを付し、スレイブ台車SC,SC1〜SC3については、符号の前にSを付して表す。したがって、たとえばマスタ台車MCの車輪装置は、MR1〜MR4,ML1〜ML4となり、スレイブ台車SC,SC1〜SC3の車輪装置は、SR1〜SR4,SL1〜SL4となる。
【0022】
(編成運転モード)
まず、台車群における台車の配置を示す基本的な編成運転モードを図1、図5および図7を参照して簡単に説明する。
【0023】
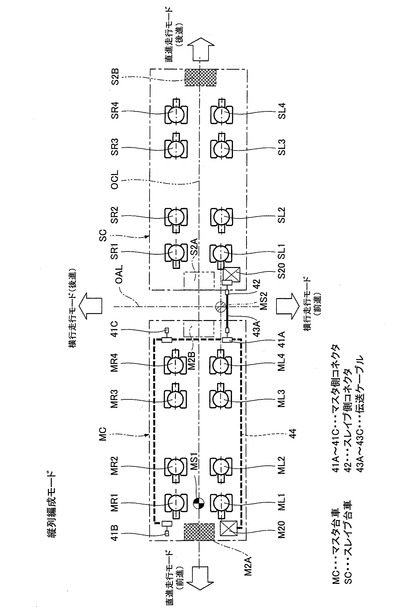
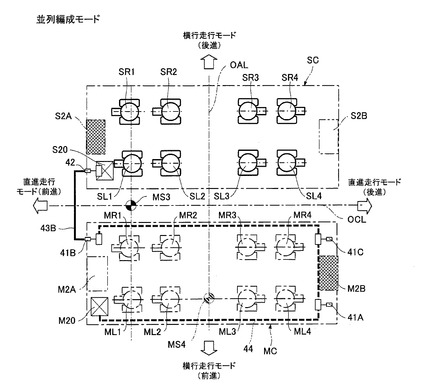
図1は縦列編成モードを示し、マスタ台車MCに対して、従動走行させるスレイブ台車SCを、台車群の幅方向の中心を通る編成進行軸OCL(車体中心軸CLと同じ)上で所定距離後方の縦列位置に配置している。
【0024】
図5は並列編成モードを示し、マスタ台車MCに対してスレイブ台車SCを、台車群の前後方向の中心を通る(編成進行軸OCLに台車群の前後方向の中央で直交する)編成中央横断軸OAL(中央横断軸ALと同じ)上で所定距離右側の並列位置に配置している。
【0025】
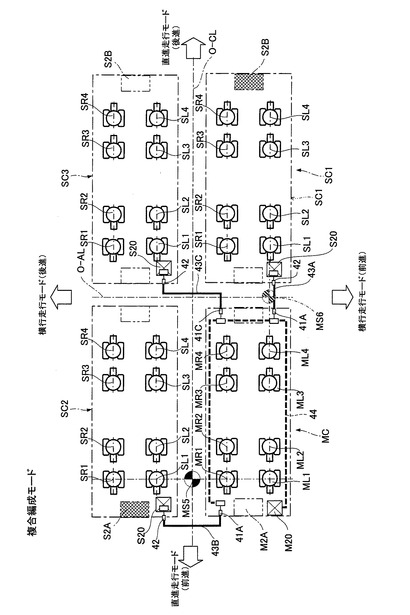
図7は複合編成モードを示し、マスタ台車MCに対して、第1スレイブ台車SC1を編成進行軸OCL上の縦列位置に配置し、第2スレイブ台車SC2を編成中央横断軸OAL上の並列位置に配置し、第3スレイブ台車SC3をマスタ台車MCの対角位置(第1スレイブ台車SC1の並列位置、または第2スレイブ台車SC2の縦列位置)に配置している。これら編成運転モードは運搬物の大きさと形状に基づいて選択される。
【0026】
(編成運転モードの検出)
マスタ台車MCには、スレイブ台車SC、SC1〜SC3の操舵コントローラS20との間で信号を送受する伝送ケーブル43A〜43Cを接続するための複数のマスタ側コネクタ41A〜41Cが設置されている。すなわち、台車本体M1の後部の左側に配置されて縦列位置のスレイブ台車SC(または第1スレイブ台車SC1)に接続するためのマスタ側コネクタ41Aと、台車本体M1の前部の右側に配置されて並列位置のスレイブ台車SC(または第2スレイブ台車SC2)に接続するためのマスタ側コネクタ41Bと、台車本体M1の後部右側に配置されて対角位置の第3スレイブ台車SC3に接続するためのマスタ側コネクタ41Cとを有し、これらマスタ側コネクタ41A〜41Cと操舵コントローラM20とが接続ケーブル44により接続される。前記伝送ケーブル43A〜43Cはそれぞれ通信ケーブルと非常停止配線から構成されている。
【0027】
またスレイブ台車SC、SC1〜SC3には、車両本体S1の前部左側に操舵コントローラS20に接続されるスレイブ側コネクタ42が設けられ、マスタ側コネクタ41A〜41Cに伝送ケーブル43A〜43Cを介してスレイブ側コネクタ42が接続されることにより、マスタ台車MCの操舵コントローラM20とスレイブ台車SC、SC1〜SC3の操舵コントローラS20との間に、互いにステアリング用の制御データと情報データとが送受されて同時に扱えるオープンフィールドネットワーク(CC-Link)が形成される。前記伝送ケーブル43A〜43C、マスタ側コネクタ41A〜41C、スレイブ側コネクタ42および接続ケーブル44などにより、ステアリング伝送手段が構成されている。
【0028】
(操舵コントローラ)
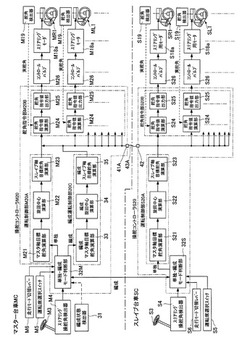
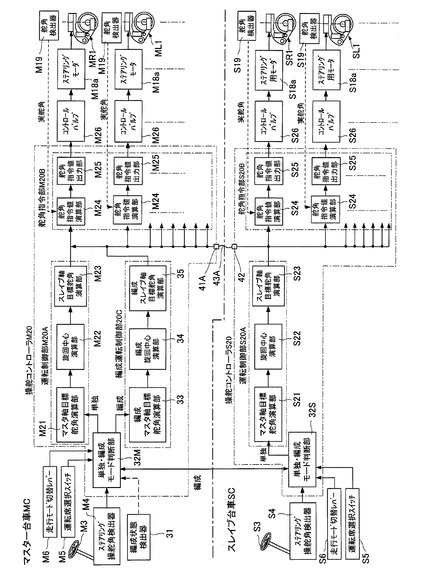
図2に示すように、マスタ台車MCには、単独/編成運転を判断し、かつ編成運転モードを検出するための編成状態検出器31が設けられている。また操舵コントローラM20には、編成状態検出器31の検出信号に基づいて単独/編成運転を判断するとともに編成運転モードを判断するマスタ側の単独・編成モード判断部(編成モード判断部)32Mと、編成時にステアリングの目標舵角である編成スレイブ軸目標舵角を演算する編成運転制御部20Cと、単独運転用の操舵制御部M20Aと、前記操舵制御部M20Aまたは編成運転制御部20Cで演算された目標舵角に基づいて各車輪装置MR1〜MR4,ML1〜ML4にそれぞれ舵角指令値を出力する舵角指令部M20Bとが具備されている。
【0029】
前記編成状態検出器31は、伝送ケーブル43A〜43Cが接続されたマスタ側コネクタ41A〜41Cを検出するもので、単独・編成モード判断部32Mでは、マスタ側コネクタ41Aが接続状態であると縦列編成モードと判断し、またマスタ側コネクタ41Bが接続状態であると並列編成モードと判断し、さらにマスタ側コネクタ41A〜41Cがそれぞれ接続状態であると複合列編成モードと判断する。この編成状態検出器31は、たとえばマスタ側コネクタ41A〜41Cにそれぞれ一定の電圧を印加して、電圧計でマスタ側コネクタ41A〜41Cの各電圧をそれぞれ計測することにより、伝送ケーブル43A〜43Cが接続されて電圧が低下するマスタ側コネクタ41A〜41Cを検出することができる。
【0030】
単独・編成モード判断部32Mでは、編成状態検出器31と走行モード切替レバーM6と運転席選択スイッチM5の信号がそれぞれ入力されており、編成状態検出器31の検出信号により単独/編成運転を判断し、さらに編成運転モードを判断する。そしてこの単独・編成モード判断部32Mで編成運転モードと判断されると、ステアリング操舵角検出器M4により検出されたステアリング操舵角が、単独・編成モード判断部32Mから編成運転制御部40の編成マスタ軸目標舵角演算部33に入力される。
【0031】
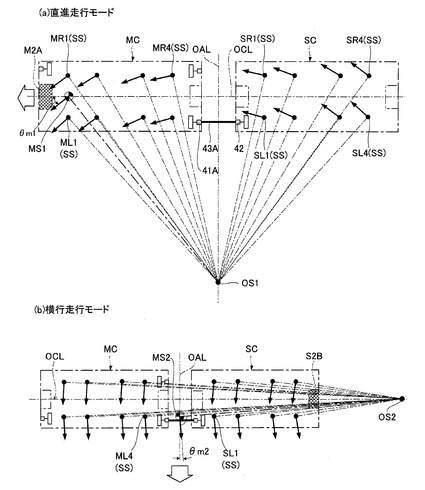
編成マスタ軸目標舵角演算部33では、ステアリング操舵角と走行モードに基づき予め設定された(仮想の)編成マスタ軸MS1〜MS6における編成マスタ軸目標舵角θm1〜θm6を演算する。たとえば縦列編成モードにおいて、図4(a)に示すように、直進/斜行走行モードにおける(仮想の)編成マスタ軸MS1は、編成進行軸OCL上で前進方向の最前列の車輪装置MR1,ML1間の中央部に設定される。また横行走行モードにおける編成マスタ軸MS2は、編成中央横断軸OAL上で横行走行モードの前進方向の最前列で中央の車輪装置ML4,SL1間の中央部に設定される。
【0032】
スレイブ台車SC、SC1〜SC3の操舵コントローラS20には、スレイブ側の単独・編成モード判断部(編成モード判断部)32Sと、単独運転時に使用される操舵制御部S20Aと、マスタ台車MCの操舵制御部M20Aまたは編成運転制御部20Cで演算された編成スレイブ軸目標舵角に基づいて各車輪装置SR1〜SR4,SL1〜SL4にそれぞれ舵角指令値を出力する舵角指令部M20Bとが具備されている。単独・編成モード判断部32Sには、ステアリング操舵角検出器S4と走行モード切替レバーS6と運転席選択スイッチS5の信号がそれぞれ入力され、単独・編成モード判断部32Mとの間でステアリング用の制御データを交換するように構成されている。たとえばスレイブ台車SC、SC1〜SC3の運転席S2A,S2Bが選択されると、ステアリング操舵角検出器S4から出力されたステアリング操舵角データが単独・編成モード判断部32Sからマスタ台車MCの単独・編成モード判断部32Mに送信されて制御される。
【0033】
(縦列編成モード)
縦列編成モードの編成搬送台車設備について、図1〜図4を参照して説明する。
この縦列編成モードでは、マスタ台車MCの前部運転席M2Aと、スレイブ台車SCの後部運転席S2Bが選択可能な指定運転席として設定され、走行モードと走行方向に対応して視界が確保しやすい側が選択される。直進走行モードで前進する時は、マスタ台車MCの前部運転席M2Aが選択され、ステアリングホイールM3の操作に基づいて、マスタ台車MCとスレイブ台車SCのステアリングが行われる。
【0034】
図4(a)に示すように、直進走行モードが選択されると、編成マスタ軸目標舵角演算部33により編成マスタ軸MS1における編成マスタ軸目標舵角θm1を求め、編成旋回中心演算部34により、編成マスタ軸目標舵角θm1に基づいて編成中央横断軸OAL上に編成台車群の編成旋回中心OS1を求める。そして編成スレイブ軸目標舵角演算部35により、編成旋回中心OS1と各車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4のスレイブ軸SSの位置から編成スレイブ軸目標舵角をそれぞれ演算する。
【0035】
また図4(b)に示すように、横行走行モードが選択されると、編成マスタ軸目標舵角演算部33により編成マスタ軸MS2における編成マスタ軸目標舵角θm1を求め、編成旋回中心演算部34により、編成マスタ軸目標舵角θm1に基づいて、編成進行軸OCL上に編成台車群の編成旋回中心OS2を求める。そして編成スレイブ軸目標舵角演算部35により、編成旋回中心OS2と各車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4のスレイブ軸SSの位置から編成スレイブ軸目標舵角をそれぞれ演算する。
【0036】
編成スレイブ軸目標舵角演算部35で求められた編成スレイブ軸目標舵角が舵角指令部M20B,S20Bの舵角指令値演算部M24,S24に送られ、舵角指令値演算部M24,S24により、編成スレイブ軸目標舵角と各舵角検出器M19,S19から出力される実舵角とに基いて舵角指令値をそれぞれ演算する。さらに舵角指令値出力部M25,S25からコントロールバルブ26に、前記舵角指令値をバルブ操作指令値として出力する。そしてこのバルブ操作指令値に基づいてコントロールバルブ26が操作されてステアリングモータ18aが所定量作動され、各車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4の車輪17がそれぞれ転舵される。
【0037】
(縦列編成モードのステアリング制御)
図2、図3を参照して縦列編成モードのステアリング制御を説明する。
大型の運搬物を縦列編成モードにより搬送する場合、マスタ台車MCに対してスレイブ台車SCを予め設定された後方の縦列位置に配置し、マスタ台車MCのマスタ側コネクタ41Aとスレイブ台車SCのスレイブ側コネクタ42とを伝送ケーブル43Aにより接続する。
【0038】
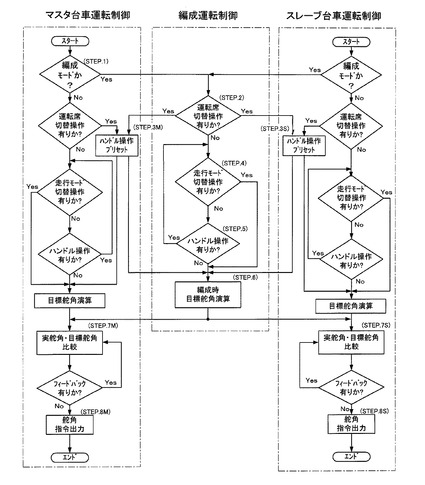
マスタ台車MCの前部運転席M2Aを使用する場合、単独・編成モード判断部32Mでは、編成状態検出器31の検出信号に基づいて、縦列編成モードを判断し(STEP.1)、単独・編成モード判断部32Mからスレイブ台車SCの単独・編成モード判断部32Mに縦列編成モード信号を送信する。そしてステアリング操舵角検出器M4から送られたステアリング操舵角を編成運転制御部20Cに出力する。
【0039】
さらに単独・編成モード判断部32Mでは、マスタ台車MCまたはスレイブ台車SCの運転席選択スイッチM5,S5から運転席切替操作信号が入力されたかどうかを検出し(STEP.2)、運転席切替操作信号が入力された場合には、マスタ台車MCおよびスレイブ台車SCでそれぞれステアリング操舵角のプリセット(STEP.3M)(STEP.3S)を行う。このプリセットは、運転席切換時に編成マスタ軸MS1,MS2を切り換えるため、台車本体M1,S1の状態から編成マスタ軸MS1,MS2の実舵角と車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4の車輪17の実舵角とを整合するように修正するためのものである。さらに走行モード切替レバーM6から走行モード切替操作信号が入力されたかどうかを検出し(STEP.4)、走行モード切替操作信号が直進走行モードのままで、入力されない場合には、引き続いてステアリング操舵角検出器M4によりステアリングホイールM3の操作があったかどうかを検出し(STEP.5)、ステアリングホイールM3が操作された場合には(STEP.4)に戻り、操ステアリングホイールM3が操作されていない場合には編成スレイブ軸目標操舵角を演算する(STEP.6)。この(STEP.6)における編成スレイブ軸目標舵角の演算は、編成マスタ軸目標舵角演算部32Mにより編成マスタ軸MS1における編成マスタ軸目標舵角θm1を求め、編成旋回中心演算部34により編成旋回中心OS1を求め、編成スレイブ軸目標舵角演算部35により各スレイブ軸SSの編成スレイブ軸目標舵角をそれぞれ演算する。
【0040】
マスタ台車MCおよびスレイブ台車SCの舵角指令部M20B,S20Bでは、各舵角指令値演算部M24,S24により、編成スレイブ軸目標舵角と実舵角とに基づいて舵角指令値を演算し(STEP.7M)(STEP.7S)、舵角指令値出力部M25,S25によりそれぞれ舵角指令値をコントロールバルブM25,S25に送り(STEP.8M)(STEP.8S)、車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4をそれぞれ操作して車輪17を転舵する。
【0041】
(並列編成モード)
図5〜図6を参照して並列編成モードを説明する。並列編成モードでは、スレイブ台車SCの前部運転席S2Aか、マスタ台車SCの後部運転席M2Bが指定運転席として選択可能に設定される。
【0042】
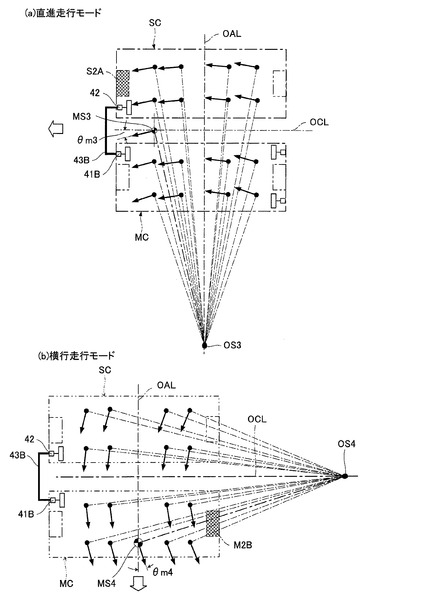
並列編成モードで、直進/斜行走行モード時の編成マスタ軸MS3は、マスタ台車MCとスレイブ台車SC間で台車群の幅方向の中央を縦断する編成進行軸OCL上で、マスタ台車MCとスレイブ台車SCの最前列の車輪装置MR1、SL1間の中央位置に設定され、また編成旋回中心OS3は、図6(a)に示すように、台車群の前後向の中央を横断する編成中央横断軸OAL上に設定される。
【0043】
また並列編成モードで、横行走行モード時の編成マスタ軸MS4は、編成中央横断軸OAL上で、最前列となる車輪装置ML3,ML4間の中心位置に設定され、また編成旋回中心OS4は、図6(b)に示すように、編成進行軸OCL上に設定される。
【0044】
(複合編成モード)
図7〜図8を参照して複合編成モードを説明する。複合編成モードでは、第2スレイブ台車SC2の前部運転席S2Aか、第1スレイブ台車SC1の後部運転席M2Bが指定運転席として選択可能に設定される。
【0045】
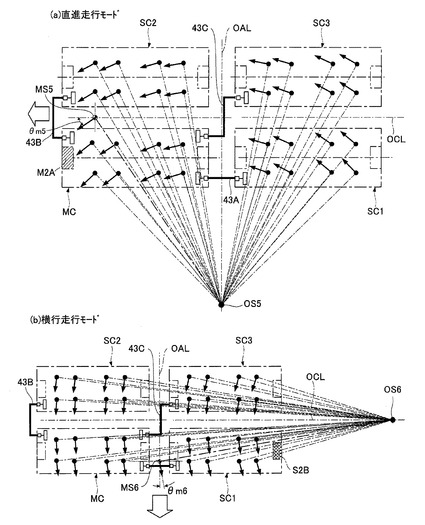
図8(a)に示すように、複合編成モードで、直進/斜行走行モード時の編成マスタ軸MS5は、台車群の中央を縦断する編成進行軸OCL上で、マスタ台車MCとスレイブ台車SCの最前列の車輪装置MR1,SL1間の中央位置に設定され、その編成旋回中心OS5は、マスタ台車MCおよび第2スレイブ台車SC2と、第1スレイブ台車SC1および第3スレイブ台車SC3の間で台車群の中央を横断する編成中央横断軸OAL上に設定される。
【0046】
また複合編成モードで、横行走行モード時の編成マスタ軸MS6は、編成中央横断軸OAL上で最前列となる車輪装置ML4,SL1間の中心位置に設定され、その編成旋回中心OS6は、編成進行軸OCL上に設定される。
【0047】
(他の編成モード)
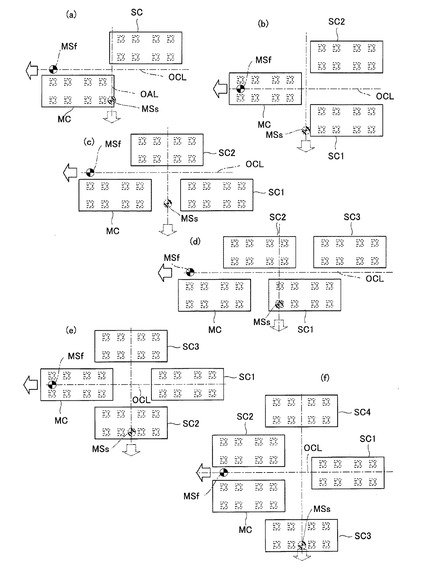
その他、大型の運搬物の形状や大きさにより、いろいろな編成運転を行うことができる。たとえば図9(a)に示すように、マスタ台車MCに対してスレイブ台車SCを斜め後方の対角位置に配置することもできる。この場合の編成進行軸OCLは、台車群の中央を縦断する位置にあり、編成中央横断軸OALは、台車群の中央を横断する位置に設定される。また直進走行モード時の編成マスタ軸MSfは、編成進行軸OCL上でマスタ台車MCの最前列の車輪装置MR1に対応して設定され、横行走行モード時の編成マスタ軸MSsは、編成中央横断軸OAL上で最前列の車輪装置SL1に対応して設定される。
【0048】
また図9(b),(c)に示すように、マスタ台車MCと第1,第2スレイブ台車SC1,SC2とを、三角形や変則三角形の頂点位置に配置してもよい。この場合の編成進行軸OCLは、台車群の中央を縦断する位置に設定され、編成中央横断軸OALは、台車群の中央を横断する位置に設定される。また直進走行モード時の編成マスタ軸MSfは、編成進行軸OCL上でマスタ台車MCの最前列の車輪装置MR1に対応して設定され、横行走行モード時の編成マスタ軸MSsは、編成中央横断軸OAL上で、最前列の車輪装置SL1に対応して、または最前列の車輪装置MS4,SL1間に設定される。
【0049】
さらに図9(d),(e)に示すように、マスタ台車MCと第1〜第3スレイブ台車SC1〜SC3とを、菱型や平行四辺形の頂点位置に配置することもできる。この場合の編成進行軸OCLは、台車群の中央を縦断する位置に設定され、編成中央横断軸OAL、台車群の中央を横断する位置に設定される。また直進走行モード時の編成マスタ軸MSfは、編成進行軸OCL上で最前列の車輪装置MR1,ML1間またはMR1,SL1間に対応して設定され、横行走行モード時の編成マスタ軸MSsは、編成中央横断軸OAL上で、最前列の車輪装置SL2,SL3間に対応して設定される。
【0050】
さらにまた図9(f)に示すように、マスタ台車MCと第1〜第4スレイブ台車SC1〜SC4とを、変則五角形の頂点位置に配置することもできる。
【図面の簡単な説明】
【0051】
【図1】本発明に係る編成搬送台車設備の実施の形態を示し、縦列編成モードを説明する平面図である。
【図2】編成搬送台車設備の制御装置を示すブロック図である。
【図3】編成搬送台車設備の制御装置の制御手順を示すフロー図である。
【図4】縦列編成モードのステアリングによる車輪の向きを示す平面図で、(a)は直進走行モード、(b)は横行走行モードを示す。
【図5】並列編成モードを説明する平面図である。
【図6】並列編成モードのステアリングによる車輪の向きを示す平面図で、(a)は直進走行モード、(b)は横行走行モードを示す。
【図7】複合編成モードを説明する平面図である。
【図8】複合編成モードのステアリングによる車輪の向きを示す平面図で、(a)は直進走行モード、(b)は横行走行モードを示す。
【図9】他の編成運転モードを説明する平面図で、(a)はスレイブ台車SCを対角位置に配置した編成モード、(b),(c)は、三角形や変則三角形の頂点位置に配置した編成モード、(d),(e)は、平行四辺形や菱型の頂点位置に配置した編成モード、(f)は変則5角形の頂点位置に配置した不整列編成モードである。
【図10】基本とする台車の側面図である。
【図11】台車の車輪装置の拡大側面図である。
【図12】台車の制御装置を示すブロック図である。
【図13】台車のステアリングを説明する概略平面図で、(a)は停止状態、(b)はステアリング状態を示す。
【符号の説明】
【0052】
MC マスタ台車
SC,SC1〜SC3 スレイブ台車
MR1〜MR4,ML1〜ML4 車輪装置
SR1〜SR4,SL1〜SL4 車輪装置
MS1〜MS6 編成マスタ軸
OCL 編成進行軸
OAL 編成中央横断軸
OS1〜OS6 編成旋回中心
M2A,S2A 前部運転席
M2B,S2B 後部運転席
M3,S3 ステアリングホイール(操舵装置)
M4,S4 ステアリング操舵角検出器
M5,S5 運転席選択スイッチ
M6,S6 走行モード切替レバー
M20,S20 操舵コントローラ
M20A,S20A 運転制御部
M20B,S20B 舵角指令部
20C 編成運転制御部
M24,S24 舵角指令値演算部
M25,S25 舵角指令値出力部
31 編成状態検出器
32M 単独・編成モード判断部(編成モード判断部)
32S 単独・編成モード判断部(編成モード判断部)
33 編成マスタ軸目標舵角演算部
34 編成旋回中心演算部
35 編成スレイブ軸目標舵角演算部
41A〜41C マスタ側コネクタ
42 スレイブ側コネクタ
43A〜43C 伝送ケーブル
【技術分野】
【0001】
本発明は、1台の台車で搬送できない船殻ブロックなどのような大型の運搬物を、複数の台車により運搬する編成搬送台車設備に関する。
【背景技術】
【0002】
船殻ブロックなどのような大型の運搬物は、1台の台車で搬送できないため、複数の台車を所定位置に配置した台車群に積載し、運搬することがある。
従来技術として、たとえば特許文献1および2に示すように、牽引車の後部に台車をリンクまたはヒンジ付きロッドを介して連結するものがあるが、この場合、コーナー部などの搬送中に、運搬物に対する台車の姿勢がそれぞれ変化するため、運搬物を鉛直軸心周りに回転自在に支持する特殊な治具を使用しない限り、大型の運搬物の運搬は困難である。また大型の搬送物を運搬する機会はそう多くなく、このために、特別に大型の搬送台車を新たに製造するのはコストがかかりすぎる。
【0003】
大型の運搬物を複数の搬送台車に積載して運搬する技術を開示した従来文献は見当たらない。
【特許文献1】特開2006−224803
【特許文献2】特開2004−195997
【特許文献3】特開2001−328555
【発明の開示】
【発明が解決しようとする課題】
【0004】
そこで、本出願人は、特許文献3において、運転席の操舵装置により車輪の舵角がそれぞれ操作される複数の独立換向式の車輪装置を有する搬送台車を提案しており、このような搬送台車を複数台使用して大型の運搬物を運搬することが考えられる。
【0005】
本発明は、複数の独立換向式の車輪装置を有する複数の自走式の台車を使用して、大型の運搬物をスムーズに運搬することができる編成搬送台車設備を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1記載の発明は、複数の独立換向式の車輪装置(MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4)と、操舵装置(M3,S3)により操作された操舵角に基づいて車輪装置の目標舵角を演算する運転制御部(M20A,S20A)、および前記目標舵角に基づいて舵角指令を前記車輪装置にそれぞれ出力して操舵する舵角指令部(M20B,S20B)を有する操舵コントローラ(M20,S20)とを具備した複数の台車により台車群を形成し、当該台車群により型の運搬物を積載して運搬する編成搬送台車設備であって、複数の台車のうち、1台を主動走行するマスタ台車(MC)とするとともに、残りをマスタ台車(MC)に従動走行するスレイブ台車(SC)とし、マスタ台車の操舵コントローラ(M20)に、台車群の台車の配置を示す編成運転モードと台車群の走行方向を示す走行モードとを判断する編成モード判断部(32M)と、編成モード判断部(32M)の信号に基づいて、操舵装置(M3,S3)により操作された操舵角から編成旋回中心(OS1〜OS6)を求め、当該編成旋回中心からマスタ台車およびスレイブ台車の各車輪装置の編成スレイブ軸目標舵角をそれぞれ演算する編成運転制御部(20C)とを設け、マスタ台車からスレイブ台車の操舵コントローラ(S20)に、編成スレイブ軸目標舵角を送信するステアリング伝送手段(41A〜41C,42,43A〜43C)を設け、スレイブ台車の操舵コントローラ(S20)は、前記編成運転制御部から前記ステアリング伝送手段を介して舵角指令部(S20B)に入力された編成スレイブ軸目標舵角に基づいて、車輪装置をそれぞれ操舵するように構成されたものである。
【0007】
請求項2記載の発明は、請求項1記載の構成において、ステアリング伝送手段は、マスタ台車(MC)に配置された複数のマスタ側コネクタ(41A〜41C)と、スレイブ台車(SC)に配置されたスレイブ側コレクタ(42)と、マスタ側コネクタ(41A〜41C)とスレイブ側コレクタ(42)とを接続する伝送ケーブル(43A〜43C)とを具備し、伝送ケーブル(43A〜43C)が接続されたマスタ側コネクタ(41A〜41C)を検出する編成状態検出器(31)を設け、編成モード判断部(32M)は、編成状態検出器の検出信号に基づいて、単独運転か編成運転かを判断するとともに編成運転モードを判断するように構成されたものである。
【0008】
請求項3記載の発明は、請求項1または2記載の構成において、編成運転モードは、少なくとも、マスタ台車(MC)に対してスレイブ台車(SC)が縦列位置に配置される縦列編成モードと、マスタ台車(MC)に対してスレイブ台車(SC)が並列位置に配置される並列編成モードと、マスタ台車(MS)に対してスレイブ台車(SC)が縦列位置と並列位置と対角位置とにそれぞれ配置される複合編成モードとを具備したものである。
【0009】
なお、括弧内の符号は、実施の形態に対応する符号で、参考のために付したものである。なお、重複する符号は省略している。
【発明の効果】
【0010】
請求項1記載の発明によれば、複数の独立換向式の車輪装置を具備した複数の台車を所定位置に配置し、マスタ台車の操舵コントローラに、編成モード判断部と編成運転制御部とを設けて、マスタ台車とスレイブ台車の車輪装置の編成スレイブ軸目標舵角を演算し、編成運転制御部からステアリング伝送手段を介してスレイブ台車の舵角指令部に編成スレイブ軸目標舵角を送信し、スレイブ台車の各車輪装置をそれぞれ操舵するように構成したので、マスタ台車の編成運転制御部により、マスタ台車とスレイブ台車の各車輪装置をステアリングして、台車群を一体に直進や旋回、横行走行させることができ、大型の運搬物をスムーズに運搬することができる。
【0011】
請求項2記載の発明によれば、編成状態検出器により、マスタ台車に配置されたマスタ側コネクタに対する伝送ケーブルの接続状態を検出して、編成モード判断部により編成運転モードを判断することができるので、編成運転モードの台車や車輪装置の位置データなどに基づいて編成搬送のステアリング制御、自動的に迅速に行うことができる。
【0012】
請求項3記載の発明によれば、少なくとも縦列編成モード、並列編成モードおよび複合編成モードを自動的に選択して、大型の運搬物を自動的に搬送することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態を図面に基づいて説明する。
[実施の形態1]
[台車の基本構造]
まず、編成搬送の基本となる単独運転用の台車を図10〜図13を参照して説明する。
【0014】
図10に示すように、単独運転用の台車Cは、上面に運搬物を積載する荷台面1aが形成された台車本体1の下面で前後位置に、前部運転席2Aおよび後部運転席2Bがそれぞれ設けられ、下面中央部にエンジン7が配置されている。また台車本体1の底面部には、複数組、たとえば左右一対で前後に4組、合計8個の独立換向式の車輪装置R1〜R4,L1〜L4が設けられており、運転席2A,2Bにそれぞれ設けられた操舵装置であるステアリングホイール3(図12)により、操舵コントローラ20を介して各車輪装置R1〜R4,L1〜L4を操舵するように構成されている。
【0015】
各車輪装置R1〜R4,L1〜L4は、図11に示すように、台車本体1にスレイブ軸SSを中心に旋回自在に支持された旋回体11と、この旋回体11から斜め下方に伸びる上アーム部12の下端部に水平ピン12aを介して上下揺動自在に支持された下アーム部13と、旋回体11と下アーム部13と間に連結されたサスペンションシリンダ14と、下アーム部13の下端部に設けられた車軸部15に回転軸15aを介して回転自在に支持されるとともに駆動モータ16により回転駆動される複数の車輪17と、台車本体1に設けられて旋回体11を介して車輪17をスレイブ軸SS周りに転舵する操舵駆動装置18とで構成され、前記操舵駆動装置18は、旋回駆動装置である油圧式ステアリングモータ18a(図12)により減速用のギヤ装置を介して旋回体11を回転させるように構成されている。また図12に示すように、各車輪装置R1〜R4,L1〜L4には、車輪17の実舵角を検出する舵角検出器19がそれぞれ設けられている。
【0016】
そして前部および後部の運転席2A,2Bには、ステアリングホイール4の他に、運転席2A,2Bを設定する運転席選択スイッチ5、走行モード選択レバー6、シフトレバーおよび操作パネルなどが具備されている。
【0017】
この単独運転用の台車Cの操舵コントローラ20を図12、図13を参照して説明する。マイクロコンピュータからなる操舵コントローラ20は、車輪装置R1〜R4,L1〜L4のスレイブ軸目標舵角(目標舵角)を求める操舵制御部20Aと、車輪装置R1〜R4,L1〜L4ごとに設けられてステアリング指令(舵角指令値)を各車輪装置R1〜R4,L1〜L4に出力する舵角指令部20Bとを具備している。そして、たとえば運転席選択スイッチ5により前部運転席2Aが選択され、かつ走行モード切替レバー6により全輪換向方式による直進走行モードが選択された場合、台車本体1の幅方向の中心を通る車体中心軸CL上で進行方向の最前列の車輪装置R1,L1(または最後列の車輪装置R4,L4)間に、(仮想の)マスタ軸MSが設定される。このマスタ軸MSは、台車本体1の旋回中心OSを求める際の基準となるものである。
【0018】
操舵制御部20Aにおいて、マスタ軸目標舵角演算部21では、前部運転席12Aのステアリング操舵角検出器4により検出されたステアリング操舵角に基づいて、マスタ軸MSにおけるマスタ軸目標舵角θmを演算する。そして旋回中心演算部22では、このマスタ軸目標舵角θmに基づいて台車本体1の旋回中心OSを求める。ここで、直進走行モードにおける旋回中心OSは、台車本体1の車体中心軸CLに、台車本体1の前後方向の中心位置で直交する中央横断軸AL上に設定される。さらにスレイブ軸目標舵角演算部23により、旋回中心OSと各車輪装置R1〜R4,L1〜L4のスレイブ軸SSまでの距離および角度に基づいてスレイブ軸目標舵角をそれぞれ演算する。
【0019】
舵角指令部20Bにおいて、舵角指令値演算部24では、前記スレイブ軸目標舵角と、各車輪装置R1〜R4,L1〜L4の舵角検出器19から出力される実舵角とに基づいて、車輪17を転舵させる舵角指令値を演算し、さらに舵角指令値出力部25では、舵角指令値に基づいて油圧式のステアリングモータ18aを介して車輪17を転舵させるバルブ操作指令値を求めて、コントロールバルブ26にそれぞれ出力し、ステアリングモータ18aを所定量回転駆動して各車輪装置R1〜R4,L1〜L4の車輪17をそれぞれ所定角度転舵させる。
【0020】
[編成搬送台車設備]
次に本発明に係る編成搬送台車設備を図1〜図8に基づいて説明する。
複数の台車Cを所定位置に配置して大型の運搬物を積載し搬送する編成搬送は、複数の台車Cのうち、1台を主動走行するマスタ台車MCとし、残りをマスタ台車MCに従動走行するスレイブ台車SCまたは第1〜第3スレイブ台車SC,SC1〜SC3とし、マスタ台車MCとスレイブ台車SC,SC1〜SC3とを連動させて一体に走行させるものである。
【0021】
ここで、マスタ台車MCとスレイブ台車S,SC1〜SC3において、単独運転用の台車Cと共通する部材の符号は、マスタ台車MCについては、符号の前にMを付し、スレイブ台車SC,SC1〜SC3については、符号の前にSを付して表す。したがって、たとえばマスタ台車MCの車輪装置は、MR1〜MR4,ML1〜ML4となり、スレイブ台車SC,SC1〜SC3の車輪装置は、SR1〜SR4,SL1〜SL4となる。
【0022】
(編成運転モード)
まず、台車群における台車の配置を示す基本的な編成運転モードを図1、図5および図7を参照して簡単に説明する。
【0023】
図1は縦列編成モードを示し、マスタ台車MCに対して、従動走行させるスレイブ台車SCを、台車群の幅方向の中心を通る編成進行軸OCL(車体中心軸CLと同じ)上で所定距離後方の縦列位置に配置している。
【0024】
図5は並列編成モードを示し、マスタ台車MCに対してスレイブ台車SCを、台車群の前後方向の中心を通る(編成進行軸OCLに台車群の前後方向の中央で直交する)編成中央横断軸OAL(中央横断軸ALと同じ)上で所定距離右側の並列位置に配置している。
【0025】
図7は複合編成モードを示し、マスタ台車MCに対して、第1スレイブ台車SC1を編成進行軸OCL上の縦列位置に配置し、第2スレイブ台車SC2を編成中央横断軸OAL上の並列位置に配置し、第3スレイブ台車SC3をマスタ台車MCの対角位置(第1スレイブ台車SC1の並列位置、または第2スレイブ台車SC2の縦列位置)に配置している。これら編成運転モードは運搬物の大きさと形状に基づいて選択される。
【0026】
(編成運転モードの検出)
マスタ台車MCには、スレイブ台車SC、SC1〜SC3の操舵コントローラS20との間で信号を送受する伝送ケーブル43A〜43Cを接続するための複数のマスタ側コネクタ41A〜41Cが設置されている。すなわち、台車本体M1の後部の左側に配置されて縦列位置のスレイブ台車SC(または第1スレイブ台車SC1)に接続するためのマスタ側コネクタ41Aと、台車本体M1の前部の右側に配置されて並列位置のスレイブ台車SC(または第2スレイブ台車SC2)に接続するためのマスタ側コネクタ41Bと、台車本体M1の後部右側に配置されて対角位置の第3スレイブ台車SC3に接続するためのマスタ側コネクタ41Cとを有し、これらマスタ側コネクタ41A〜41Cと操舵コントローラM20とが接続ケーブル44により接続される。前記伝送ケーブル43A〜43Cはそれぞれ通信ケーブルと非常停止配線から構成されている。
【0027】
またスレイブ台車SC、SC1〜SC3には、車両本体S1の前部左側に操舵コントローラS20に接続されるスレイブ側コネクタ42が設けられ、マスタ側コネクタ41A〜41Cに伝送ケーブル43A〜43Cを介してスレイブ側コネクタ42が接続されることにより、マスタ台車MCの操舵コントローラM20とスレイブ台車SC、SC1〜SC3の操舵コントローラS20との間に、互いにステアリング用の制御データと情報データとが送受されて同時に扱えるオープンフィールドネットワーク(CC-Link)が形成される。前記伝送ケーブル43A〜43C、マスタ側コネクタ41A〜41C、スレイブ側コネクタ42および接続ケーブル44などにより、ステアリング伝送手段が構成されている。
【0028】
(操舵コントローラ)
図2に示すように、マスタ台車MCには、単独/編成運転を判断し、かつ編成運転モードを検出するための編成状態検出器31が設けられている。また操舵コントローラM20には、編成状態検出器31の検出信号に基づいて単独/編成運転を判断するとともに編成運転モードを判断するマスタ側の単独・編成モード判断部(編成モード判断部)32Mと、編成時にステアリングの目標舵角である編成スレイブ軸目標舵角を演算する編成運転制御部20Cと、単独運転用の操舵制御部M20Aと、前記操舵制御部M20Aまたは編成運転制御部20Cで演算された目標舵角に基づいて各車輪装置MR1〜MR4,ML1〜ML4にそれぞれ舵角指令値を出力する舵角指令部M20Bとが具備されている。
【0029】
前記編成状態検出器31は、伝送ケーブル43A〜43Cが接続されたマスタ側コネクタ41A〜41Cを検出するもので、単独・編成モード判断部32Mでは、マスタ側コネクタ41Aが接続状態であると縦列編成モードと判断し、またマスタ側コネクタ41Bが接続状態であると並列編成モードと判断し、さらにマスタ側コネクタ41A〜41Cがそれぞれ接続状態であると複合列編成モードと判断する。この編成状態検出器31は、たとえばマスタ側コネクタ41A〜41Cにそれぞれ一定の電圧を印加して、電圧計でマスタ側コネクタ41A〜41Cの各電圧をそれぞれ計測することにより、伝送ケーブル43A〜43Cが接続されて電圧が低下するマスタ側コネクタ41A〜41Cを検出することができる。
【0030】
単独・編成モード判断部32Mでは、編成状態検出器31と走行モード切替レバーM6と運転席選択スイッチM5の信号がそれぞれ入力されており、編成状態検出器31の検出信号により単独/編成運転を判断し、さらに編成運転モードを判断する。そしてこの単独・編成モード判断部32Mで編成運転モードと判断されると、ステアリング操舵角検出器M4により検出されたステアリング操舵角が、単独・編成モード判断部32Mから編成運転制御部40の編成マスタ軸目標舵角演算部33に入力される。
【0031】
編成マスタ軸目標舵角演算部33では、ステアリング操舵角と走行モードに基づき予め設定された(仮想の)編成マスタ軸MS1〜MS6における編成マスタ軸目標舵角θm1〜θm6を演算する。たとえば縦列編成モードにおいて、図4(a)に示すように、直進/斜行走行モードにおける(仮想の)編成マスタ軸MS1は、編成進行軸OCL上で前進方向の最前列の車輪装置MR1,ML1間の中央部に設定される。また横行走行モードにおける編成マスタ軸MS2は、編成中央横断軸OAL上で横行走行モードの前進方向の最前列で中央の車輪装置ML4,SL1間の中央部に設定される。
【0032】
スレイブ台車SC、SC1〜SC3の操舵コントローラS20には、スレイブ側の単独・編成モード判断部(編成モード判断部)32Sと、単独運転時に使用される操舵制御部S20Aと、マスタ台車MCの操舵制御部M20Aまたは編成運転制御部20Cで演算された編成スレイブ軸目標舵角に基づいて各車輪装置SR1〜SR4,SL1〜SL4にそれぞれ舵角指令値を出力する舵角指令部M20Bとが具備されている。単独・編成モード判断部32Sには、ステアリング操舵角検出器S4と走行モード切替レバーS6と運転席選択スイッチS5の信号がそれぞれ入力され、単独・編成モード判断部32Mとの間でステアリング用の制御データを交換するように構成されている。たとえばスレイブ台車SC、SC1〜SC3の運転席S2A,S2Bが選択されると、ステアリング操舵角検出器S4から出力されたステアリング操舵角データが単独・編成モード判断部32Sからマスタ台車MCの単独・編成モード判断部32Mに送信されて制御される。
【0033】
(縦列編成モード)
縦列編成モードの編成搬送台車設備について、図1〜図4を参照して説明する。
この縦列編成モードでは、マスタ台車MCの前部運転席M2Aと、スレイブ台車SCの後部運転席S2Bが選択可能な指定運転席として設定され、走行モードと走行方向に対応して視界が確保しやすい側が選択される。直進走行モードで前進する時は、マスタ台車MCの前部運転席M2Aが選択され、ステアリングホイールM3の操作に基づいて、マスタ台車MCとスレイブ台車SCのステアリングが行われる。
【0034】
図4(a)に示すように、直進走行モードが選択されると、編成マスタ軸目標舵角演算部33により編成マスタ軸MS1における編成マスタ軸目標舵角θm1を求め、編成旋回中心演算部34により、編成マスタ軸目標舵角θm1に基づいて編成中央横断軸OAL上に編成台車群の編成旋回中心OS1を求める。そして編成スレイブ軸目標舵角演算部35により、編成旋回中心OS1と各車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4のスレイブ軸SSの位置から編成スレイブ軸目標舵角をそれぞれ演算する。
【0035】
また図4(b)に示すように、横行走行モードが選択されると、編成マスタ軸目標舵角演算部33により編成マスタ軸MS2における編成マスタ軸目標舵角θm1を求め、編成旋回中心演算部34により、編成マスタ軸目標舵角θm1に基づいて、編成進行軸OCL上に編成台車群の編成旋回中心OS2を求める。そして編成スレイブ軸目標舵角演算部35により、編成旋回中心OS2と各車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4のスレイブ軸SSの位置から編成スレイブ軸目標舵角をそれぞれ演算する。
【0036】
編成スレイブ軸目標舵角演算部35で求められた編成スレイブ軸目標舵角が舵角指令部M20B,S20Bの舵角指令値演算部M24,S24に送られ、舵角指令値演算部M24,S24により、編成スレイブ軸目標舵角と各舵角検出器M19,S19から出力される実舵角とに基いて舵角指令値をそれぞれ演算する。さらに舵角指令値出力部M25,S25からコントロールバルブ26に、前記舵角指令値をバルブ操作指令値として出力する。そしてこのバルブ操作指令値に基づいてコントロールバルブ26が操作されてステアリングモータ18aが所定量作動され、各車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4の車輪17がそれぞれ転舵される。
【0037】
(縦列編成モードのステアリング制御)
図2、図3を参照して縦列編成モードのステアリング制御を説明する。
大型の運搬物を縦列編成モードにより搬送する場合、マスタ台車MCに対してスレイブ台車SCを予め設定された後方の縦列位置に配置し、マスタ台車MCのマスタ側コネクタ41Aとスレイブ台車SCのスレイブ側コネクタ42とを伝送ケーブル43Aにより接続する。
【0038】
マスタ台車MCの前部運転席M2Aを使用する場合、単独・編成モード判断部32Mでは、編成状態検出器31の検出信号に基づいて、縦列編成モードを判断し(STEP.1)、単独・編成モード判断部32Mからスレイブ台車SCの単独・編成モード判断部32Mに縦列編成モード信号を送信する。そしてステアリング操舵角検出器M4から送られたステアリング操舵角を編成運転制御部20Cに出力する。
【0039】
さらに単独・編成モード判断部32Mでは、マスタ台車MCまたはスレイブ台車SCの運転席選択スイッチM5,S5から運転席切替操作信号が入力されたかどうかを検出し(STEP.2)、運転席切替操作信号が入力された場合には、マスタ台車MCおよびスレイブ台車SCでそれぞれステアリング操舵角のプリセット(STEP.3M)(STEP.3S)を行う。このプリセットは、運転席切換時に編成マスタ軸MS1,MS2を切り換えるため、台車本体M1,S1の状態から編成マスタ軸MS1,MS2の実舵角と車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4の車輪17の実舵角とを整合するように修正するためのものである。さらに走行モード切替レバーM6から走行モード切替操作信号が入力されたかどうかを検出し(STEP.4)、走行モード切替操作信号が直進走行モードのままで、入力されない場合には、引き続いてステアリング操舵角検出器M4によりステアリングホイールM3の操作があったかどうかを検出し(STEP.5)、ステアリングホイールM3が操作された場合には(STEP.4)に戻り、操ステアリングホイールM3が操作されていない場合には編成スレイブ軸目標操舵角を演算する(STEP.6)。この(STEP.6)における編成スレイブ軸目標舵角の演算は、編成マスタ軸目標舵角演算部32Mにより編成マスタ軸MS1における編成マスタ軸目標舵角θm1を求め、編成旋回中心演算部34により編成旋回中心OS1を求め、編成スレイブ軸目標舵角演算部35により各スレイブ軸SSの編成スレイブ軸目標舵角をそれぞれ演算する。
【0040】
マスタ台車MCおよびスレイブ台車SCの舵角指令部M20B,S20Bでは、各舵角指令値演算部M24,S24により、編成スレイブ軸目標舵角と実舵角とに基づいて舵角指令値を演算し(STEP.7M)(STEP.7S)、舵角指令値出力部M25,S25によりそれぞれ舵角指令値をコントロールバルブM25,S25に送り(STEP.8M)(STEP.8S)、車輪装置MR1〜MR4,ML1〜ML4,SR1〜SR4,SL1〜SL4をそれぞれ操作して車輪17を転舵する。
【0041】
(並列編成モード)
図5〜図6を参照して並列編成モードを説明する。並列編成モードでは、スレイブ台車SCの前部運転席S2Aか、マスタ台車SCの後部運転席M2Bが指定運転席として選択可能に設定される。
【0042】
並列編成モードで、直進/斜行走行モード時の編成マスタ軸MS3は、マスタ台車MCとスレイブ台車SC間で台車群の幅方向の中央を縦断する編成進行軸OCL上で、マスタ台車MCとスレイブ台車SCの最前列の車輪装置MR1、SL1間の中央位置に設定され、また編成旋回中心OS3は、図6(a)に示すように、台車群の前後向の中央を横断する編成中央横断軸OAL上に設定される。
【0043】
また並列編成モードで、横行走行モード時の編成マスタ軸MS4は、編成中央横断軸OAL上で、最前列となる車輪装置ML3,ML4間の中心位置に設定され、また編成旋回中心OS4は、図6(b)に示すように、編成進行軸OCL上に設定される。
【0044】
(複合編成モード)
図7〜図8を参照して複合編成モードを説明する。複合編成モードでは、第2スレイブ台車SC2の前部運転席S2Aか、第1スレイブ台車SC1の後部運転席M2Bが指定運転席として選択可能に設定される。
【0045】
図8(a)に示すように、複合編成モードで、直進/斜行走行モード時の編成マスタ軸MS5は、台車群の中央を縦断する編成進行軸OCL上で、マスタ台車MCとスレイブ台車SCの最前列の車輪装置MR1,SL1間の中央位置に設定され、その編成旋回中心OS5は、マスタ台車MCおよび第2スレイブ台車SC2と、第1スレイブ台車SC1および第3スレイブ台車SC3の間で台車群の中央を横断する編成中央横断軸OAL上に設定される。
【0046】
また複合編成モードで、横行走行モード時の編成マスタ軸MS6は、編成中央横断軸OAL上で最前列となる車輪装置ML4,SL1間の中心位置に設定され、その編成旋回中心OS6は、編成進行軸OCL上に設定される。
【0047】
(他の編成モード)
その他、大型の運搬物の形状や大きさにより、いろいろな編成運転を行うことができる。たとえば図9(a)に示すように、マスタ台車MCに対してスレイブ台車SCを斜め後方の対角位置に配置することもできる。この場合の編成進行軸OCLは、台車群の中央を縦断する位置にあり、編成中央横断軸OALは、台車群の中央を横断する位置に設定される。また直進走行モード時の編成マスタ軸MSfは、編成進行軸OCL上でマスタ台車MCの最前列の車輪装置MR1に対応して設定され、横行走行モード時の編成マスタ軸MSsは、編成中央横断軸OAL上で最前列の車輪装置SL1に対応して設定される。
【0048】
また図9(b),(c)に示すように、マスタ台車MCと第1,第2スレイブ台車SC1,SC2とを、三角形や変則三角形の頂点位置に配置してもよい。この場合の編成進行軸OCLは、台車群の中央を縦断する位置に設定され、編成中央横断軸OALは、台車群の中央を横断する位置に設定される。また直進走行モード時の編成マスタ軸MSfは、編成進行軸OCL上でマスタ台車MCの最前列の車輪装置MR1に対応して設定され、横行走行モード時の編成マスタ軸MSsは、編成中央横断軸OAL上で、最前列の車輪装置SL1に対応して、または最前列の車輪装置MS4,SL1間に設定される。
【0049】
さらに図9(d),(e)に示すように、マスタ台車MCと第1〜第3スレイブ台車SC1〜SC3とを、菱型や平行四辺形の頂点位置に配置することもできる。この場合の編成進行軸OCLは、台車群の中央を縦断する位置に設定され、編成中央横断軸OAL、台車群の中央を横断する位置に設定される。また直進走行モード時の編成マスタ軸MSfは、編成進行軸OCL上で最前列の車輪装置MR1,ML1間またはMR1,SL1間に対応して設定され、横行走行モード時の編成マスタ軸MSsは、編成中央横断軸OAL上で、最前列の車輪装置SL2,SL3間に対応して設定される。
【0050】
さらにまた図9(f)に示すように、マスタ台車MCと第1〜第4スレイブ台車SC1〜SC4とを、変則五角形の頂点位置に配置することもできる。
【図面の簡単な説明】
【0051】
【図1】本発明に係る編成搬送台車設備の実施の形態を示し、縦列編成モードを説明する平面図である。
【図2】編成搬送台車設備の制御装置を示すブロック図である。
【図3】編成搬送台車設備の制御装置の制御手順を示すフロー図である。
【図4】縦列編成モードのステアリングによる車輪の向きを示す平面図で、(a)は直進走行モード、(b)は横行走行モードを示す。
【図5】並列編成モードを説明する平面図である。
【図6】並列編成モードのステアリングによる車輪の向きを示す平面図で、(a)は直進走行モード、(b)は横行走行モードを示す。
【図7】複合編成モードを説明する平面図である。
【図8】複合編成モードのステアリングによる車輪の向きを示す平面図で、(a)は直進走行モード、(b)は横行走行モードを示す。
【図9】他の編成運転モードを説明する平面図で、(a)はスレイブ台車SCを対角位置に配置した編成モード、(b),(c)は、三角形や変則三角形の頂点位置に配置した編成モード、(d),(e)は、平行四辺形や菱型の頂点位置に配置した編成モード、(f)は変則5角形の頂点位置に配置した不整列編成モードである。
【図10】基本とする台車の側面図である。
【図11】台車の車輪装置の拡大側面図である。
【図12】台車の制御装置を示すブロック図である。
【図13】台車のステアリングを説明する概略平面図で、(a)は停止状態、(b)はステアリング状態を示す。
【符号の説明】
【0052】
MC マスタ台車
SC,SC1〜SC3 スレイブ台車
MR1〜MR4,ML1〜ML4 車輪装置
SR1〜SR4,SL1〜SL4 車輪装置
MS1〜MS6 編成マスタ軸
OCL 編成進行軸
OAL 編成中央横断軸
OS1〜OS6 編成旋回中心
M2A,S2A 前部運転席
M2B,S2B 後部運転席
M3,S3 ステアリングホイール(操舵装置)
M4,S4 ステアリング操舵角検出器
M5,S5 運転席選択スイッチ
M6,S6 走行モード切替レバー
M20,S20 操舵コントローラ
M20A,S20A 運転制御部
M20B,S20B 舵角指令部
20C 編成運転制御部
M24,S24 舵角指令値演算部
M25,S25 舵角指令値出力部
31 編成状態検出器
32M 単独・編成モード判断部(編成モード判断部)
32S 単独・編成モード判断部(編成モード判断部)
33 編成マスタ軸目標舵角演算部
34 編成旋回中心演算部
35 編成スレイブ軸目標舵角演算部
41A〜41C マスタ側コネクタ
42 スレイブ側コネクタ
43A〜43C 伝送ケーブル
【特許請求の範囲】
【請求項1】
複数の独立換向式の車輪装置と、操舵装置により操作された操舵角に基づいて車輪装置の目標舵角を演算する運転制御部、および前記目標舵角に基づいて舵角指令を前記車輪装置にそれぞれ出力して操舵する舵角指令部を有する操舵コントローラとを具備した複数の台車により台車群を形成し、当該台車群に大型の運搬物を積載して運搬する編成搬送台車設備であって、
複数の台車のうち、1台を主動走行するマスタ台車とするとともに、残りをマスタ台車に従動走行するスレイブ台車とし、
マスタ台車の操舵コントローラに、台車群の台車の配置を示す編成運転モードと台車群の走行方向を示す走行モードとを判断する編成モード判断部と、編成モード判断部の信号に基づいて、操舵装置により操作された操舵角から編成旋回中心を求め、当該編成旋回中心からマスタ台車およびスレイブ台車の各車輪装置の編成スレイブ軸目標舵角をそれぞれ演算する編成運転制御部とを設け、
マスタ台車からスレイブ台車の操舵コントローラに、編成スレイブ軸目標舵角を送信するステアリング伝送手段を設け、
スレイブ台車では、前記編成運転制御部から前記ステアリング伝送手段を介して舵角指令部に入力された編成スレイブ軸目標舵角に基づいて、車輪装置をそれぞれ操舵するように構成された
ことを特徴とする編成搬送台車設備。
【請求項2】
ステアリング伝送手段は、マスタ台車に配置された複数のマスタ側コネクタと、スレイブ台車に配置されたスレイブ側コレクタと、マスタ側コネクタとスレイブ側コレクタとを接続する伝送ケーブルとを具備し、
伝送ケーブルが接続されたマスタ側コネクタを検出する編成状態検出器を設け、
編成モード判断部は、編成状態検出器の検出信号に基づいて、単独運転か編成運転かを判断するとともに編成運転モードを判断するように構成された
ことを特徴とする請求項1記載の編成搬送台車設備。
【請求項3】
編成運転モードは、少なくとも、マスタ台車に対してスレイブ台車が縦列位置に配置される縦列編成モードと、マスタ台車に対してスレイブ台車が並列位置に配置される横列編成モードと、マスタ台車に対してスレイブ台車が縦列位置と並列位置と対角位置とにそれぞれ配置される複合編成モードとを具備した
ことを特徴とする請求項1または2記載の編成搬送台車設備。
【請求項1】
複数の独立換向式の車輪装置と、操舵装置により操作された操舵角に基づいて車輪装置の目標舵角を演算する運転制御部、および前記目標舵角に基づいて舵角指令を前記車輪装置にそれぞれ出力して操舵する舵角指令部を有する操舵コントローラとを具備した複数の台車により台車群を形成し、当該台車群に大型の運搬物を積載して運搬する編成搬送台車設備であって、
複数の台車のうち、1台を主動走行するマスタ台車とするとともに、残りをマスタ台車に従動走行するスレイブ台車とし、
マスタ台車の操舵コントローラに、台車群の台車の配置を示す編成運転モードと台車群の走行方向を示す走行モードとを判断する編成モード判断部と、編成モード判断部の信号に基づいて、操舵装置により操作された操舵角から編成旋回中心を求め、当該編成旋回中心からマスタ台車およびスレイブ台車の各車輪装置の編成スレイブ軸目標舵角をそれぞれ演算する編成運転制御部とを設け、
マスタ台車からスレイブ台車の操舵コントローラに、編成スレイブ軸目標舵角を送信するステアリング伝送手段を設け、
スレイブ台車では、前記編成運転制御部から前記ステアリング伝送手段を介して舵角指令部に入力された編成スレイブ軸目標舵角に基づいて、車輪装置をそれぞれ操舵するように構成された
ことを特徴とする編成搬送台車設備。
【請求項2】
ステアリング伝送手段は、マスタ台車に配置された複数のマスタ側コネクタと、スレイブ台車に配置されたスレイブ側コレクタと、マスタ側コネクタとスレイブ側コレクタとを接続する伝送ケーブルとを具備し、
伝送ケーブルが接続されたマスタ側コネクタを検出する編成状態検出器を設け、
編成モード判断部は、編成状態検出器の検出信号に基づいて、単独運転か編成運転かを判断するとともに編成運転モードを判断するように構成された
ことを特徴とする請求項1記載の編成搬送台車設備。
【請求項3】
編成運転モードは、少なくとも、マスタ台車に対してスレイブ台車が縦列位置に配置される縦列編成モードと、マスタ台車に対してスレイブ台車が並列位置に配置される横列編成モードと、マスタ台車に対してスレイブ台車が縦列位置と並列位置と対角位置とにそれぞれ配置される複合編成モードとを具備した
ことを特徴とする請求項1または2記載の編成搬送台車設備。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−36631(P2010−36631A)
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願番号】特願2008−199109(P2008−199109)
【出願日】平成20年8月1日(2008.8.1)
【出願人】(000003241)TCM株式会社 (319)
【Fターム(参考)】
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願日】平成20年8月1日(2008.8.1)
【出願人】(000003241)TCM株式会社 (319)
【Fターム(参考)】
[ Back to top ]