
縦編機
【課題】コンパクトで合理的な構造を有し、輸送や工場設置が容易な縦編機を提供する。
【解決手段】単一支持構造体2と、単一支持構造体2に装着される少なくとも1つの針床3と、単一支持構造体2に装着され、糸を針床3へ供給するための少なくとも1つの糸ガイドバー4と、糸ガイドバー4及び針床3への糸供給装置5と、縦編機1の動作のための電気・電子手段6であって、縦編機1の動作のための少なくとも主電子手段8を備え、主電子手段8が、編機1のモータを操作するための少なくとも電力用電子機器装置及び/又はサーボドライブを備えるとともに単一支持構造体2に装着される、電気・電子手段6と、を備える。
【解決手段】単一支持構造体2と、単一支持構造体2に装着される少なくとも1つの針床3と、単一支持構造体2に装着され、糸を針床3へ供給するための少なくとも1つの糸ガイドバー4と、糸ガイドバー4及び針床3への糸供給装置5と、縦編機1の動作のための電気・電子手段6であって、縦編機1の動作のための少なくとも主電子手段8を備え、主電子手段8が、編機1のモータを操作するための少なくとも電力用電子機器装置及び/又はサーボドライブを備えるとともに単一支持構造体2に装着される、電気・電子手段6と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、縦編機、すなわち、一般に縦織機、ラッシェル織機、又は、トリコット織機と称され、様々なタイプの織物製品の製造で、通常使用される直線編機に関する。
【背景技術】
【0002】
既知の縦編機は、そのうちの2つの典型例が米国特許出願第4,761,973号及び米国特許出願第5,855,126号に開示されており、単一支持構造体から形成される。単一支持構造体内には、例えば針床、糸ガイドバー、針床及びバーの作動のための機構、糸供給装置、及び、編機によって生産される織物を下げるための装置など、編機の編み作業の実行のための全ての機械部品が収容されて装着される。
【0003】
そのような単一支持構造体以外に、既知の縦編機は、常に、第1の構造体から十分に分離される第2の外部構造体、一般的には制御キャビネット又はパネルを含んでおり、当該構造体内には、編機の殆どの繊細な電子部品が収容され(特に、モータを操作するためのサーボドライバなどの電力用電子機器、及び、幾つかの処理ユニット)、また、当該構造体は、複数の接続ケーブルによって単一支持構造体に対して接続される。
【0004】
そのような構造は一連の理由に起因しており、主な理由のうちの1つは、非常に高い速度での莫大な質量の移動に起因して縦編機にはよくある高い振動を、そのような繊細な電子部品が受けないようにすることの必要性である。
【0005】
実際、縦編機における振動がかなり高く、現代の編機の制御用電子機器及び処理用電子機器などの繊細な電子部品にとって極めて危険であることは良く知られている。
【0006】
前述した既知の解決策は、幾つかの関連する欠点を有している。
【0007】
まず第一に、2つの別個の構造体の存在によって編機が更に複雑になり、両方の構造体の構成、必要とされる様々な接続の構成、及び、それらのインタフェースの構成のためのコストが更に高くなる。
【0008】
また、そのような構造は編機の設置の複雑さを高め、それにより、別個の部品の接続が必要になるととともに、これらの作業中に故障及び損傷の危険が高まる。
【0009】
また、編機のための輸送コスト及び関連する危険性も増大される。
【0010】
更に、編機の全体構造は大きすぎてあまり合理的でなく、また、繊細で高価なインタフェースの存在、及び、2つの構造体同士の間の接続の存在は、厄介であり、使用中に編機が故障及び損傷する危険性を高める。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】米国特許出願第4,761,973号明細書
【特許文献2】米国特許出願第5,855,126号明細書
【発明の概要】
【発明が解決しようとする課題】
【0012】
本発明の目的は、前述した欠点を伴わない縦編機を提案することによって従来技術の問題を解決することである。
【0013】
特に、本発明の目的は、コンパクトで合理的な構造を有する縦編機であって、あまり大きすぎることなく、したがって、実現し、輸送し、工場に設置することが容易な、縦編機を提供することである。結果として、本発明の目的は、一体のモジュール構造を有する縦編機であって、様々な電子部品に容易にアクセスできる縦編機を提供することである。
【0014】
本発明の更なる他の目的は、動作中に高い信頼性を有する縦編機を提案することである。
【0015】
また、本発明の目的は、編機の装着ステップ中における故障の危険性と、使用中における機械に対する損傷の危険性とをかなり減少させる縦編機を提示することである。
【0016】
本発明の最後の目的は、実現が容易であり、また、その実施、輸送、設置のための時間が短くコストが低い縦編機を実現することである。
【0017】
以下の説明から更に明らかとなるべきこれらの目的及び他の目的は、添付の請求項に係る縦編機により本発明にしたがって達成される。
【0018】
更なる特徴及び利点は、以下の図面に例示目的で開示される本発明の好ましいが排他的ではない実施形態の説明から更に明らかになる。
【図面の簡単な説明】
【0019】
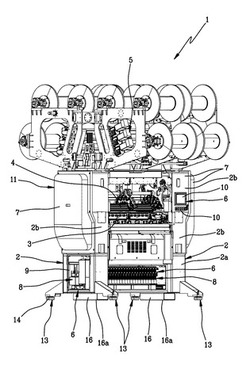
【図1】幾つかの閉塞カバーが取り外された本実施形態に係る縦編機の斜視図である。
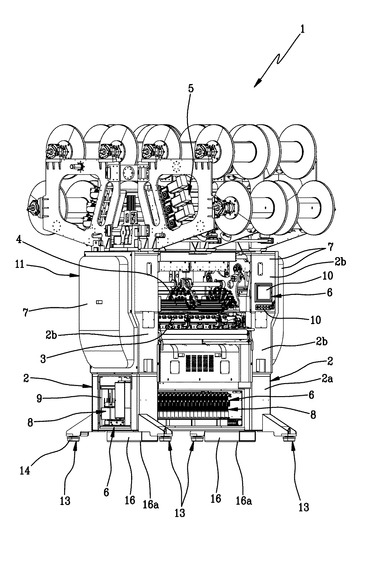
【図2】図1の編機の下部の正面図である。
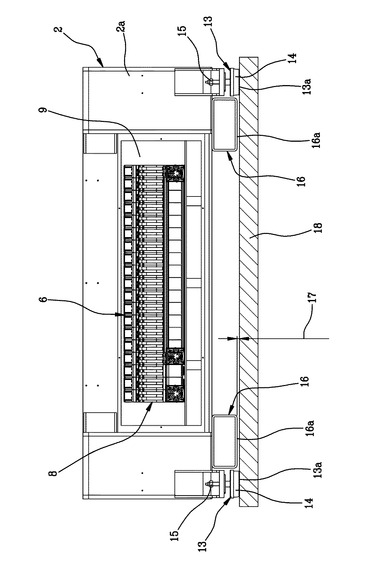
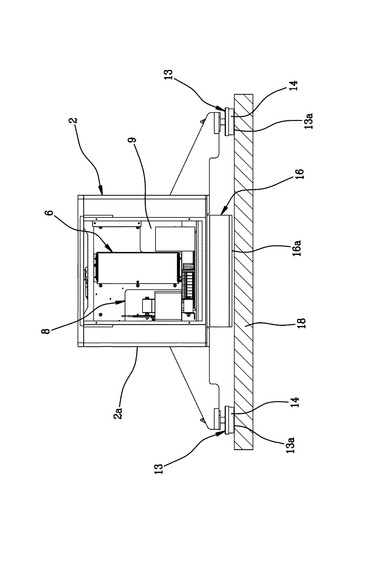
【図3】図1の編機の下部の側面図である。
【図4】図1の編機の内部構成要素の詳細図である。
【図5】図1の編機の代替実施形態の図2の図と同様の図である。
【発明を実施するための形態】
【0020】
上記図面を参照すると、本発明に係る縦編機1は単一支持構造体2を備える。本発明によれば、そのような単一支持構造体2は、唯一の独立した構造体であり、例えば接続ケーブルによって間接的に接続される複数の別個の分離した支持構造体を備えておらず、したがって、主支持構造体とは別個の従来のキャビネットを含んでいない。単一支持構造体2は、組み立てられて互いに一体化されることにより1つの全体的な支持構造体、すなわち、唯一のブロックを構築する更に多くの分離された構造部品によっても実現することができる。
【0021】
この本文において、用語「単一支持構造体」とは、縦編機1の全ての構成部品(したがって、カバーも)を支持し及び/又は収容するように互いに装着されて接続される支持構造要素の組を意味しており、また、本発明によれば、構造要素のこの組は、唯一のブロックを形成し、上記構造体の外側で接続ケーブルによって互いに接続される幾つかの別個のブロックを形成しない。
【0022】
縦編機1は、少なくとも1つの針床3であって、好ましくは少なくとも2つの針床3、糸を針床3へ供給するための少なくとも1つの糸ガイドバー4であって、好ましくは固定タイプ又はジャカード織タイプの複数の糸ガイドバー4、及び、図示の例では単一支持構造体2の上側に装着されて糸を糸ガイドバー4及び針床3へ供給するための糸供給装置5など、単一支持構造体2に装着される複数のそれ自体従来の構成部品を更に備えている。
【0023】
編機1は、例えば、針床によって形成される織物を下げるための装置、針床及び糸ガイドバーを駆動するための機構など、完全に従来どおりであり縦編機という定義において暗黙のものであるためにこの明細書では詳しく説明及び開示されない他の従来の構成部品を更に備える。
【0024】
編機1は、例えば、編機1の様々な内部構成部品の電気接続のため、編機1の作業プログラムの作成のため、及び、前述した全ての構成部品の動作の制御のため、それ自体従来のものであり且つ縦編機1の動作に不可欠な複数の電気・電子手段6を更に備える。
【0025】
本発明によれば、編機1の上記電気・電子手段6は、全てが編機1の上記単一支持構造体2に対して完全に装着される。
【0026】
好ましい実施形態において、縦編機1の動作のための電気・電子手段6は、単一支持構造体2と一体化され、収容され、及び、装着され、したがって、単一支持構造体2及び対応する閉塞カバー7のほぼ内側に収容される。
【0027】
「ほぼ内側」は、本明細書においては、ユーザインタフェースモニタ及びプログラミングキーボードなどの何らかの構成部品が編機1の単一支持構造体2のカバーに装着される場合も含んでいる。
【0028】
編機1の電気・電子手段6は構成部品の幾つかのサブセットを含んでおり、そのうちの主要なものは以下の通りである。
【0029】
1−縦編機1の動作のための主電子手段8。本発明によれば、主電子手段8は、従来技術では単一支持構造体2から分離された外側キャビネットの内側に常に配置された、機械モータを操作するための少なくともパワーエレクトロニクス及び/又はサーボドライブを備えている。好ましくは、このサブセットは、例えば従来の処理ユニット及び関連する構成部品などの、編機1及びその構成部品が実行しなければならない動作を処理し、時としてマスター部品と称される電子部品も含んでいる。
【0030】
好ましくは、これらの主電子手段8は、処理装置及び制御装置、すなわち、編機の動作のためのCPU又はプロセッサ、及び、編機の残りの部分に対する接続のためのI/O装置、すなわち、アナログ・デジタル入力/出力装置などの他の電子装置、の少なくとも一部を含むことができる。
【0031】
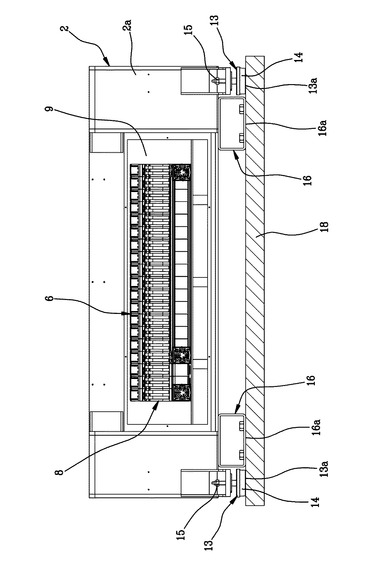
本発明によれば、主電子手段8は、単一支持構造体2に装着され、好ましくは単一支持構造体2内に装着され、より好ましくは単一支持構造体2の下部2aに得られる少なくとも1つのハウジング区画室9内に装着される。
【0032】
このハウジング区画室9は、針床3及び糸ガイドバー4の下側に配置されることが好ましい。このように、他の部品よりも繊細なこれらの電子部品は、地面から離れたその高さ及びその構造の頑丈さのおかげにより振動を殆ど受けない編機1の部分に位置づけられる。
【0033】
好ましくは、主電子要素8は、地面から20〜100cm離れた高さに装着され、とにかく20cmを下回らない高さに装着されることが有益であり好ましい。
【0034】
2−ユーザインタフェース電子手段10は、編機1のオペレータへのデータ入力・出力を管理するために主電子手段8に対して接続される。ユーザインタフェース電子手段10は、例えば、モニタ、キーボード、複数の制御キー、及び、必要に応じて処理ユニット又はCPUの一部、並びに、データ、電源のための必要な接続ケーブルなどを含むことができる。
【0035】
ユーザインタフェース電子手段10は、下部2aよりも上側及び/又は下部2aよりも高い高さ、例えば針床3及び糸ガイドバー4などの動作部品とほぼ同じ高さに配置される上記単一支持構造体2の中央部及び/又は側部2bに装着される。
【0036】
3−縦編機1の機械部品を制御するための副電子手段11。副電子手段は、それらが「スレーブ」であるため、すなわち、主電子手段8に接続され且つ主電子手段8によって制御されるため、スレーブ電子手段とも称される。副電子手段11は、例えば、モータの専用のエレクトロニクス、上記モータと一体化される電子機器、センサ、エンコーダ、圧電装置、アナログ/デジタル変換器、データ又は電源接続ケーブルなどを含むことができる。これらの副電子手段11は、主電子手段8ほど繊細ではなく、好ましくは、単一支持構造体2に装着され且つ支持構造体の中央部及び/又は側部2bで上記支持構造体の内側に装着され、いずれにしても下部2aの上側及び/又は下部2aよりも高い高さに配置される。
【0037】
4−編機1の様々な部品の接続のための従来の電気手段であって、例えば接続ケーブルなどであり、そのうちの僅かは、例えば電源ネットワークへの接続のために編機1の単一支持構造体2の外側に延びることができるもの。しかしながら、編機の内部部品の接続のための全ての電気手段は、単一支持構造体の内側に収容されることが好ましい。
【0038】
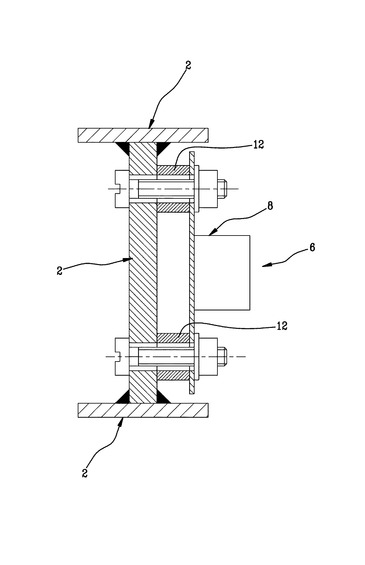
本実施形態によれば、縦編機1の動作のための電気・電子手段6、及び/又は、縦編機1の動作のための主電子手段8、及び/又は、縦編機1の機械部品の制御のための副電子手段11の少なくとも一部は、好ましくは弾性タイプの振動減衰要素12によって単一支持構造体2に装着される。
【0039】
図4に示されるように、特に主電子手段8は、単一支持構造体2と上記主電子手段8との間に配置される好ましくは弾性タイプの振動減衰要素12によって編機1の単一支持構造体2に装着され、要素12は、主電子要素8へ伝えられる振動の更なる減少を可能にする。
【0040】
振動減衰要素12は、また、必要に応じて編機の他の減衰要素も、任意の適切な弾性減衰材料、例えばVULCOLAN(登録商標)から形成することができる。
【0041】
先に言及された電気・電子手段6の全てを装着するとき、電気・電子手段の故障の危険性を減らすためにこの措置を講じることができる。本発明によれば、縦編機1は、単一支持構造体2を支持してしたがって編機を支持するために適切な地面18に載置するための複数の脚部13を更に備えており、また特に、開示された実施形態は4つの脚部13を含んでいる。これらの載置脚部13には、編機1における振動を吸収して該振動の大きさを減らすようになっている弾性要素などの振動減衰装置14が設けられるのが有利である。
【0042】
また、これらの脚部13は、例えば、回転要素を回転させることにより編機1を昇降させることができるそれ自体従来のタイプのネジ機構15によって高さ調整でき、それによって単一支持構造体2及び縦編機1の地面18からの高さを変えられることが好ましい。本発明によれば、縦編機1は、単一支持構造体2の下側に装着され且つ載置面16aを備える少なくとも1つの追加の減衰要素16を更に備える。
【0043】
複数の上記追加の減衰要素16を設けることができ、また、開示された実施形態では、2つの減衰要素が編機1の両側に対称的に配置される。
【0044】
載置面16aは、編機1が静止した状態で地面18から所定の距離17を隔てられ、そして、編機1の少なくとも一定の動作状態(すなわち、少なくとも所定の動作速度での一定の運転状態)中に載置面16aが地面18と接触して、編機の振動を減衰するように構成される。
【0045】
更に詳しくは、追加の減衰要素16の載置面16aは、編機1が静止した状態で脚部13の地面上の載置面13aから大きな距離17を隔てられ、そして、編機1の少なくとも一定の動作状態中に、少なくとも脚部13の地面上の載置面13aの高さまで、あるいは更に先まで下降できるように構成される。
【0046】
したがって、編機1が運転中のとき、残留振動により、追加の減衰要素16は、地面18と接触する(脚部13には、例えば弾性タイプの、したがって、編機1の垂直動作を減少させることができる上記振動減衰装置14が設けられているため)とともに、追加の減衰要素16の載置面16aを通じて振動エネルギを地面18へ解放し、それにより、上記振動が減衰されて該振動の大きさが低減される。
【0047】
編機1が静止した状態における、追加の減衰要素16の載置面16aと脚部13の地面上の載置面13aの高さとの間の距離17は、縦編機1の少なくとも動作状態中に上記載置面16aへ伝えられる振動の振幅よりも小さく、そのため、追加の減衰要素16の載置面16aが地面18に接触できる。
【0048】
編機1が静止した状態における追加の減衰要素16の上記載置面16aと上記脚部13の地面上の載置面13aとの間の距離は、1〜5mmの範囲であることが好ましく、又は、代替実施形態では1mm未満であることが好ましい。
【0049】
高さ調整可能な脚部13は、載置される地面18の特定の外観及び様々なニーズに応じて追加の減衰要素16の載置面16aの地面からの高さ17を調整することもできるのが有益である。
【0050】
好ましくは、追加の減衰要素16の載置面16aの幅及び/又は長さは、単一支持構造体2の下部の幅及び/又は長さのそれぞれの少なくとも50%に対応し、また、特に、追加の減衰要素16は、単一支持構造体2の下部2aの延在部のかなりの部分で延びることが好ましい。
【0051】
この追加の減衰要素16は、下部2aの2つの水平寸法のうちの1つに沿ってほぼ全体的に延びることができるのが有益である。
【0052】
第1の代替実施形態では、任意の適した締結手段、例えばボルト等によって単一支持構造体2を地面に結合させることができる。特に、図5に示される実施形態において、追加の要素16は、地面まで延びて、それらの載置面16aを地面と接触させるとともに、例えばボルトによって地面に締結される。
【0053】
代替的な方法として、追加の要素16は、地面まで延び、地面に締結されることなく、機械荷重の一部を支持してもよい。
【0054】
添付図面に示されない他の代替実施形態において、追加の要素16は、例えば載置面16aの下側に適用される振動減衰装置と共に下側に設けることができ、また、この振動減衰装置は、順に地面と接触することができ、あるいは、地面から特定の距離17を隔てることができる。
【0055】
このように想起される本発明は様々に変更及び変形することができ、また、これらの変更及び変形の全ては本発明の思想の枠組みの範囲内に入る。実際に、様々なニーズに応じて任意の材料又はサイズを使用できる。また、全ての細部を他の技術的に等価な要素と置き換えることができる。
【0056】
本発明は重要な利点を達成する。第一に、本発明に係る縦編機は、コンパクトで、合理的な、あまり大きくない構造を有する。その結果、本発明に係る編機は、実現し、輸送し、工場に設置することが容易である。また、そのような編機は、一体化されたモジュール構造を有し、様々な電子部品の検査及びメンテナンスのために容易にアクセスできる。更に、本発明に係る編機は、動作中に信頼性が高く、既知の機械に対してメンテナンスの必要性及びコストを低減する。また、本発明に係る編機の構造は、編機の装着ステップ中の故障の危険性と、使用中の機械に対する損傷の危険性とをかなり減少させる。これは、機械構造がただ1つしかなくコンパクトであって、損傷を受ける外部接続がないからである。最終的に、本発明に係る縦編機は、実現が容易であり、また、その実施、輸送、設置のための時間が短くコストが低いことに留意すべきである。
【符号の説明】
【0057】
1…縦編機、2…単一支持構造体、2a…下部、2b…側部、3…針床、4…糸ガイドバー、5…糸供給装置、6…電気・電子手段、7…閉塞カバー、8…主電子手段、9…ハウジング区画室、10…ユーザインタフェース電子手段、11…副電子手段、12…振動減衰要素、13…脚部、13a…載置面、14…振動減衰装置、15…ネジ機構、16…減衰要素、16a…載置面、17…距離、18…地面
【技術分野】
【0001】
本発明は、縦編機、すなわち、一般に縦織機、ラッシェル織機、又は、トリコット織機と称され、様々なタイプの織物製品の製造で、通常使用される直線編機に関する。
【背景技術】
【0002】
既知の縦編機は、そのうちの2つの典型例が米国特許出願第4,761,973号及び米国特許出願第5,855,126号に開示されており、単一支持構造体から形成される。単一支持構造体内には、例えば針床、糸ガイドバー、針床及びバーの作動のための機構、糸供給装置、及び、編機によって生産される織物を下げるための装置など、編機の編み作業の実行のための全ての機械部品が収容されて装着される。
【0003】
そのような単一支持構造体以外に、既知の縦編機は、常に、第1の構造体から十分に分離される第2の外部構造体、一般的には制御キャビネット又はパネルを含んでおり、当該構造体内には、編機の殆どの繊細な電子部品が収容され(特に、モータを操作するためのサーボドライバなどの電力用電子機器、及び、幾つかの処理ユニット)、また、当該構造体は、複数の接続ケーブルによって単一支持構造体に対して接続される。
【0004】
そのような構造は一連の理由に起因しており、主な理由のうちの1つは、非常に高い速度での莫大な質量の移動に起因して縦編機にはよくある高い振動を、そのような繊細な電子部品が受けないようにすることの必要性である。
【0005】
実際、縦編機における振動がかなり高く、現代の編機の制御用電子機器及び処理用電子機器などの繊細な電子部品にとって極めて危険であることは良く知られている。
【0006】
前述した既知の解決策は、幾つかの関連する欠点を有している。
【0007】
まず第一に、2つの別個の構造体の存在によって編機が更に複雑になり、両方の構造体の構成、必要とされる様々な接続の構成、及び、それらのインタフェースの構成のためのコストが更に高くなる。
【0008】
また、そのような構造は編機の設置の複雑さを高め、それにより、別個の部品の接続が必要になるととともに、これらの作業中に故障及び損傷の危険が高まる。
【0009】
また、編機のための輸送コスト及び関連する危険性も増大される。
【0010】
更に、編機の全体構造は大きすぎてあまり合理的でなく、また、繊細で高価なインタフェースの存在、及び、2つの構造体同士の間の接続の存在は、厄介であり、使用中に編機が故障及び損傷する危険性を高める。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】米国特許出願第4,761,973号明細書
【特許文献2】米国特許出願第5,855,126号明細書
【発明の概要】
【発明が解決しようとする課題】
【0012】
本発明の目的は、前述した欠点を伴わない縦編機を提案することによって従来技術の問題を解決することである。
【0013】
特に、本発明の目的は、コンパクトで合理的な構造を有する縦編機であって、あまり大きすぎることなく、したがって、実現し、輸送し、工場に設置することが容易な、縦編機を提供することである。結果として、本発明の目的は、一体のモジュール構造を有する縦編機であって、様々な電子部品に容易にアクセスできる縦編機を提供することである。
【0014】
本発明の更なる他の目的は、動作中に高い信頼性を有する縦編機を提案することである。
【0015】
また、本発明の目的は、編機の装着ステップ中における故障の危険性と、使用中における機械に対する損傷の危険性とをかなり減少させる縦編機を提示することである。
【0016】
本発明の最後の目的は、実現が容易であり、また、その実施、輸送、設置のための時間が短くコストが低い縦編機を実現することである。
【0017】
以下の説明から更に明らかとなるべきこれらの目的及び他の目的は、添付の請求項に係る縦編機により本発明にしたがって達成される。
【0018】
更なる特徴及び利点は、以下の図面に例示目的で開示される本発明の好ましいが排他的ではない実施形態の説明から更に明らかになる。
【図面の簡単な説明】
【0019】
【図1】幾つかの閉塞カバーが取り外された本実施形態に係る縦編機の斜視図である。
【図2】図1の編機の下部の正面図である。
【図3】図1の編機の下部の側面図である。
【図4】図1の編機の内部構成要素の詳細図である。
【図5】図1の編機の代替実施形態の図2の図と同様の図である。
【発明を実施するための形態】
【0020】
上記図面を参照すると、本発明に係る縦編機1は単一支持構造体2を備える。本発明によれば、そのような単一支持構造体2は、唯一の独立した構造体であり、例えば接続ケーブルによって間接的に接続される複数の別個の分離した支持構造体を備えておらず、したがって、主支持構造体とは別個の従来のキャビネットを含んでいない。単一支持構造体2は、組み立てられて互いに一体化されることにより1つの全体的な支持構造体、すなわち、唯一のブロックを構築する更に多くの分離された構造部品によっても実現することができる。
【0021】
この本文において、用語「単一支持構造体」とは、縦編機1の全ての構成部品(したがって、カバーも)を支持し及び/又は収容するように互いに装着されて接続される支持構造要素の組を意味しており、また、本発明によれば、構造要素のこの組は、唯一のブロックを形成し、上記構造体の外側で接続ケーブルによって互いに接続される幾つかの別個のブロックを形成しない。
【0022】
縦編機1は、少なくとも1つの針床3であって、好ましくは少なくとも2つの針床3、糸を針床3へ供給するための少なくとも1つの糸ガイドバー4であって、好ましくは固定タイプ又はジャカード織タイプの複数の糸ガイドバー4、及び、図示の例では単一支持構造体2の上側に装着されて糸を糸ガイドバー4及び針床3へ供給するための糸供給装置5など、単一支持構造体2に装着される複数のそれ自体従来の構成部品を更に備えている。
【0023】
編機1は、例えば、針床によって形成される織物を下げるための装置、針床及び糸ガイドバーを駆動するための機構など、完全に従来どおりであり縦編機という定義において暗黙のものであるためにこの明細書では詳しく説明及び開示されない他の従来の構成部品を更に備える。
【0024】
編機1は、例えば、編機1の様々な内部構成部品の電気接続のため、編機1の作業プログラムの作成のため、及び、前述した全ての構成部品の動作の制御のため、それ自体従来のものであり且つ縦編機1の動作に不可欠な複数の電気・電子手段6を更に備える。
【0025】
本発明によれば、編機1の上記電気・電子手段6は、全てが編機1の上記単一支持構造体2に対して完全に装着される。
【0026】
好ましい実施形態において、縦編機1の動作のための電気・電子手段6は、単一支持構造体2と一体化され、収容され、及び、装着され、したがって、単一支持構造体2及び対応する閉塞カバー7のほぼ内側に収容される。
【0027】
「ほぼ内側」は、本明細書においては、ユーザインタフェースモニタ及びプログラミングキーボードなどの何らかの構成部品が編機1の単一支持構造体2のカバーに装着される場合も含んでいる。
【0028】
編機1の電気・電子手段6は構成部品の幾つかのサブセットを含んでおり、そのうちの主要なものは以下の通りである。
【0029】
1−縦編機1の動作のための主電子手段8。本発明によれば、主電子手段8は、従来技術では単一支持構造体2から分離された外側キャビネットの内側に常に配置された、機械モータを操作するための少なくともパワーエレクトロニクス及び/又はサーボドライブを備えている。好ましくは、このサブセットは、例えば従来の処理ユニット及び関連する構成部品などの、編機1及びその構成部品が実行しなければならない動作を処理し、時としてマスター部品と称される電子部品も含んでいる。
【0030】
好ましくは、これらの主電子手段8は、処理装置及び制御装置、すなわち、編機の動作のためのCPU又はプロセッサ、及び、編機の残りの部分に対する接続のためのI/O装置、すなわち、アナログ・デジタル入力/出力装置などの他の電子装置、の少なくとも一部を含むことができる。
【0031】
本発明によれば、主電子手段8は、単一支持構造体2に装着され、好ましくは単一支持構造体2内に装着され、より好ましくは単一支持構造体2の下部2aに得られる少なくとも1つのハウジング区画室9内に装着される。
【0032】
このハウジング区画室9は、針床3及び糸ガイドバー4の下側に配置されることが好ましい。このように、他の部品よりも繊細なこれらの電子部品は、地面から離れたその高さ及びその構造の頑丈さのおかげにより振動を殆ど受けない編機1の部分に位置づけられる。
【0033】
好ましくは、主電子要素8は、地面から20〜100cm離れた高さに装着され、とにかく20cmを下回らない高さに装着されることが有益であり好ましい。
【0034】
2−ユーザインタフェース電子手段10は、編機1のオペレータへのデータ入力・出力を管理するために主電子手段8に対して接続される。ユーザインタフェース電子手段10は、例えば、モニタ、キーボード、複数の制御キー、及び、必要に応じて処理ユニット又はCPUの一部、並びに、データ、電源のための必要な接続ケーブルなどを含むことができる。
【0035】
ユーザインタフェース電子手段10は、下部2aよりも上側及び/又は下部2aよりも高い高さ、例えば針床3及び糸ガイドバー4などの動作部品とほぼ同じ高さに配置される上記単一支持構造体2の中央部及び/又は側部2bに装着される。
【0036】
3−縦編機1の機械部品を制御するための副電子手段11。副電子手段は、それらが「スレーブ」であるため、すなわち、主電子手段8に接続され且つ主電子手段8によって制御されるため、スレーブ電子手段とも称される。副電子手段11は、例えば、モータの専用のエレクトロニクス、上記モータと一体化される電子機器、センサ、エンコーダ、圧電装置、アナログ/デジタル変換器、データ又は電源接続ケーブルなどを含むことができる。これらの副電子手段11は、主電子手段8ほど繊細ではなく、好ましくは、単一支持構造体2に装着され且つ支持構造体の中央部及び/又は側部2bで上記支持構造体の内側に装着され、いずれにしても下部2aの上側及び/又は下部2aよりも高い高さに配置される。
【0037】
4−編機1の様々な部品の接続のための従来の電気手段であって、例えば接続ケーブルなどであり、そのうちの僅かは、例えば電源ネットワークへの接続のために編機1の単一支持構造体2の外側に延びることができるもの。しかしながら、編機の内部部品の接続のための全ての電気手段は、単一支持構造体の内側に収容されることが好ましい。
【0038】
本実施形態によれば、縦編機1の動作のための電気・電子手段6、及び/又は、縦編機1の動作のための主電子手段8、及び/又は、縦編機1の機械部品の制御のための副電子手段11の少なくとも一部は、好ましくは弾性タイプの振動減衰要素12によって単一支持構造体2に装着される。
【0039】
図4に示されるように、特に主電子手段8は、単一支持構造体2と上記主電子手段8との間に配置される好ましくは弾性タイプの振動減衰要素12によって編機1の単一支持構造体2に装着され、要素12は、主電子要素8へ伝えられる振動の更なる減少を可能にする。
【0040】
振動減衰要素12は、また、必要に応じて編機の他の減衰要素も、任意の適切な弾性減衰材料、例えばVULCOLAN(登録商標)から形成することができる。
【0041】
先に言及された電気・電子手段6の全てを装着するとき、電気・電子手段の故障の危険性を減らすためにこの措置を講じることができる。本発明によれば、縦編機1は、単一支持構造体2を支持してしたがって編機を支持するために適切な地面18に載置するための複数の脚部13を更に備えており、また特に、開示された実施形態は4つの脚部13を含んでいる。これらの載置脚部13には、編機1における振動を吸収して該振動の大きさを減らすようになっている弾性要素などの振動減衰装置14が設けられるのが有利である。
【0042】
また、これらの脚部13は、例えば、回転要素を回転させることにより編機1を昇降させることができるそれ自体従来のタイプのネジ機構15によって高さ調整でき、それによって単一支持構造体2及び縦編機1の地面18からの高さを変えられることが好ましい。本発明によれば、縦編機1は、単一支持構造体2の下側に装着され且つ載置面16aを備える少なくとも1つの追加の減衰要素16を更に備える。
【0043】
複数の上記追加の減衰要素16を設けることができ、また、開示された実施形態では、2つの減衰要素が編機1の両側に対称的に配置される。
【0044】
載置面16aは、編機1が静止した状態で地面18から所定の距離17を隔てられ、そして、編機1の少なくとも一定の動作状態(すなわち、少なくとも所定の動作速度での一定の運転状態)中に載置面16aが地面18と接触して、編機の振動を減衰するように構成される。
【0045】
更に詳しくは、追加の減衰要素16の載置面16aは、編機1が静止した状態で脚部13の地面上の載置面13aから大きな距離17を隔てられ、そして、編機1の少なくとも一定の動作状態中に、少なくとも脚部13の地面上の載置面13aの高さまで、あるいは更に先まで下降できるように構成される。
【0046】
したがって、編機1が運転中のとき、残留振動により、追加の減衰要素16は、地面18と接触する(脚部13には、例えば弾性タイプの、したがって、編機1の垂直動作を減少させることができる上記振動減衰装置14が設けられているため)とともに、追加の減衰要素16の載置面16aを通じて振動エネルギを地面18へ解放し、それにより、上記振動が減衰されて該振動の大きさが低減される。
【0047】
編機1が静止した状態における、追加の減衰要素16の載置面16aと脚部13の地面上の載置面13aの高さとの間の距離17は、縦編機1の少なくとも動作状態中に上記載置面16aへ伝えられる振動の振幅よりも小さく、そのため、追加の減衰要素16の載置面16aが地面18に接触できる。
【0048】
編機1が静止した状態における追加の減衰要素16の上記載置面16aと上記脚部13の地面上の載置面13aとの間の距離は、1〜5mmの範囲であることが好ましく、又は、代替実施形態では1mm未満であることが好ましい。
【0049】
高さ調整可能な脚部13は、載置される地面18の特定の外観及び様々なニーズに応じて追加の減衰要素16の載置面16aの地面からの高さ17を調整することもできるのが有益である。
【0050】
好ましくは、追加の減衰要素16の載置面16aの幅及び/又は長さは、単一支持構造体2の下部の幅及び/又は長さのそれぞれの少なくとも50%に対応し、また、特に、追加の減衰要素16は、単一支持構造体2の下部2aの延在部のかなりの部分で延びることが好ましい。
【0051】
この追加の減衰要素16は、下部2aの2つの水平寸法のうちの1つに沿ってほぼ全体的に延びることができるのが有益である。
【0052】
第1の代替実施形態では、任意の適した締結手段、例えばボルト等によって単一支持構造体2を地面に結合させることができる。特に、図5に示される実施形態において、追加の要素16は、地面まで延びて、それらの載置面16aを地面と接触させるとともに、例えばボルトによって地面に締結される。
【0053】
代替的な方法として、追加の要素16は、地面まで延び、地面に締結されることなく、機械荷重の一部を支持してもよい。
【0054】
添付図面に示されない他の代替実施形態において、追加の要素16は、例えば載置面16aの下側に適用される振動減衰装置と共に下側に設けることができ、また、この振動減衰装置は、順に地面と接触することができ、あるいは、地面から特定の距離17を隔てることができる。
【0055】
このように想起される本発明は様々に変更及び変形することができ、また、これらの変更及び変形の全ては本発明の思想の枠組みの範囲内に入る。実際に、様々なニーズに応じて任意の材料又はサイズを使用できる。また、全ての細部を他の技術的に等価な要素と置き換えることができる。
【0056】
本発明は重要な利点を達成する。第一に、本発明に係る縦編機は、コンパクトで、合理的な、あまり大きくない構造を有する。その結果、本発明に係る編機は、実現し、輸送し、工場に設置することが容易である。また、そのような編機は、一体化されたモジュール構造を有し、様々な電子部品の検査及びメンテナンスのために容易にアクセスできる。更に、本発明に係る編機は、動作中に信頼性が高く、既知の機械に対してメンテナンスの必要性及びコストを低減する。また、本発明に係る編機の構造は、編機の装着ステップ中の故障の危険性と、使用中の機械に対する損傷の危険性とをかなり減少させる。これは、機械構造がただ1つしかなくコンパクトであって、損傷を受ける外部接続がないからである。最終的に、本発明に係る縦編機は、実現が容易であり、また、その実施、輸送、設置のための時間が短くコストが低いことに留意すべきである。
【符号の説明】
【0057】
1…縦編機、2…単一支持構造体、2a…下部、2b…側部、3…針床、4…糸ガイドバー、5…糸供給装置、6…電気・電子手段、7…閉塞カバー、8…主電子手段、9…ハウジング区画室、10…ユーザインタフェース電子手段、11…副電子手段、12…振動減衰要素、13…脚部、13a…載置面、14…振動減衰装置、15…ネジ機構、16…減衰要素、16a…載置面、17…距離、18…地面
【特許請求の範囲】
【請求項1】
縦編機(1)において、
単一支持構造体(2)と、
前記単一支持構造体(2)に装着される少なくとも1つの針床(3)と、
前記単一支持構造体(2)に装着され、糸を前記針床(3)へ供給するための少なくとも1つの糸ガイドバー(4)と、
前記糸ガイドバー(4)及び前記針床(3)への糸供給装置(5)と、
前記縦編機(1)の動作のための電気・電子手段(6)であって、前記縦編機(1)の動作のための主電子手段(8)を少なくとも備え、前記主電子手段(8)が、前記縦編機(1)のモータを操作するための電力用電子機器及び/又は前記縦編機(1)のモータを操作するためのサーボドライブ及び/又は前記縦編機(1)の電子処理装置を少なくとも備えるとともに、前記単一支持構造体(2)に締結される、電気・電子手段(6)と、
を備える縦編機(1)。
【請求項2】
前記縦編機(1)の動作のための前記主電子手段(8)が前記単一支持構造体(2)内に装着されることを特徴とする、請求項1に記載の縦編機。
【請求項3】
前記縦編機(1)の動作のための前記主電子手段(8)が、前記針床(3)及び前記糸ガイドバー(4)よりも低い高さで、前記単一支持構造体(2)の下部に得られる少なくとも1つのハウジング区画室(9)内に装着されることを特徴とする、請求項2に記載の縦編機。
【請求項4】
前記ハウジング区画室(9)が、前記単一支持構造体(2)の下部に得られるとともに、前記針床(3)及び前記糸ガイドバー(4)よりも下側に配置されることを特徴とする、請求項3に記載の縦編機。
【請求項5】
前記縦編機(1)の動作のための前記電気・電子手段(6)が、前記縦編機(1)の部品のための接続ケーブルを含み、全てが前記単一支持構造体(2)に対して完全に締結されることを特徴とする、請求項1〜4のいずれか一項に記載の縦編機。
【請求項6】
前記縦編機(1)の動作のための前記電気・電子手段(6)が、前記縦編機(1)の部品のための接続ケーブルを含み、前記単一支持構造体(2)と一体化されて内部に装着されることを特徴とする、請求項1〜5のいずれか一項に記載の縦編機。
【請求項7】
前記単一支持構造体(2)が、唯一の独立した構造であり、及び/又は、互いに一体に接続される複数の部品から成ることを特徴とする、請求項1〜6のいずれか一項に記載の縦編機。
【請求項8】
前記電気・電子手段(6)が、前記主電子手段(8)に対して接続されるユーザインタフェース電子手段(10)であって、前記下部(2a)よりも上側及び/又は前記下部(2a)よりも高い高さに配置される前記単一支持構造体(2)の中央部及び/又は側部(2b)で前記支持構造体(2)に対して締結されるユーザインタフェース電子手段(10)を更に備えることを特徴とする、請求項1〜7のいずれか一項に記載の縦編機。
【請求項9】
前記電気・電子手段(6)が、前記縦編機(1)の機械部品を制御するための副電子手段(11)を更に備え、副電子手段(11)が、前記主電子手段(8)に対して接続され且つ前記下部(2a)よりも上側及び/又は前記下部(2a)よりも高い高さに配置される前記単一支持構造体(2)の中央部及び/又は側部(2b)で前記支持構造体(2)に対して締結されることを特徴とする、請求項1〜8のいずれか一項に記載の縦編機。
【請求項10】
前記単一支持構造体(2)が、前記縦編機(1)を支持するようになっており、地面(18)に載置するための複数の脚部(13)を更に備えるとともに、前記単一支持構造体(2)の下部(2a)の下側に装着され且つ載置面(16a)を備える少なくとも1つの追加の減衰要素(16)を更に備え、前記載置面(16a)が、前記縦編機(1)が静止した状態で地面(18)から所定の距離(17)を隔てるように、また、前記縦編機の振動を減衰させるため、前記縦編機(1)の少なくとも一定の動作状態中に地面(18)と接触するように構成されることを特徴とする、請求項1〜9のいずれか一項に記載の縦編機。
【請求項11】
前記追加の減衰要素(16)の前記載置面(16a)が、前記縦編機(1)が静止した状態で前記脚部(13)の地面上の載置面(13a)から大きな距離(17)を隔てるように、また、前記縦編機(1)の少なくとも動作状態中に少なくとも前記脚部(13)の地面上の載置面(13a)の高さまで下降するように構成されることを特徴とする、請求項10に記載の縦編機。
【請求項12】
前記縦編機(1)が静止した状態での前記追加の減衰要素(16)の前記載置面(16a)と前記脚部(13)の地面上の載置面(13a)の高さとの間の距離(17)が、前記縦編機(1)の少なくとも一定の動作状態中に前記載置面(16a)へ伝えられる振動の振幅よりも小さいことを特徴とする、請求項10又は11に記載の縦編機。
【請求項13】
前記縦編機(1)が静止した状態での前記追加の減衰要素(16)の前記載置面(16a)と前記脚部(13)の地面上の載置面(13a)の高さとの間の距離(17)が1〜5mmの範囲であることを特徴とする、請求項10〜12のいずれか一項に記載の縦編機。
【請求項14】
前記追加の減衰要素(16)を複数備えることを特徴とする、請求項10〜13のいずれか一項に記載の縦編機。
【請求項15】
前記縦編機(1)を支持するために適切な地面(18)に載置するための複数の脚部(13)を備え、前記脚部(13)には振動減衰装置(14)が設けられることを特徴とする、請求項1〜14のいずれか一項に記載の縦編機。
【請求項16】
前記脚部(13)が、高さ調整でき、それによって単一支持構造体(2)及び前記縦編機(1)の地面(18)からの高さ及び/又は前記載置面(16a)の地面からの距離(17)を変えられることを特徴とする、請求項1〜15のいずれか一項に記載の縦編機。
【請求項17】
地面(18)に載置される下側載置面(16a)を有する複数の追加の減衰要素(16)を備えることを特徴とする、請求項16に記載の縦編機。
【請求項18】
前記追加の減衰要素(16)には、前記載置面(16a)に締結される振動減衰装置が設けられることを特徴とする、請求項10〜17のいずれか一項に記載の縦編機。
【請求項19】
前記単一支持構造体(2)が締結手段によって地面に結合されることを特徴とする、請求項1〜18のいずれか一項に記載の縦編機。
【請求項20】
前記縦編機(1)の動作のための前記電気・電子手段(6)、及び/又は、前記縦編機(1)の動作のための前記主電子手段8、及び/又は、前記縦編機(1)の機械部品の制御のための前記副電子手段(11)の少なくとも一部は、前記単一支持構造体との間に配置される振動減衰要素(12)によって前記単一支持構造体(2)に対して締結されることを特徴とする、請求項1〜19のいずれか一項に記載の縦編機。
【請求項1】
縦編機(1)において、
単一支持構造体(2)と、
前記単一支持構造体(2)に装着される少なくとも1つの針床(3)と、
前記単一支持構造体(2)に装着され、糸を前記針床(3)へ供給するための少なくとも1つの糸ガイドバー(4)と、
前記糸ガイドバー(4)及び前記針床(3)への糸供給装置(5)と、
前記縦編機(1)の動作のための電気・電子手段(6)であって、前記縦編機(1)の動作のための主電子手段(8)を少なくとも備え、前記主電子手段(8)が、前記縦編機(1)のモータを操作するための電力用電子機器及び/又は前記縦編機(1)のモータを操作するためのサーボドライブ及び/又は前記縦編機(1)の電子処理装置を少なくとも備えるとともに、前記単一支持構造体(2)に締結される、電気・電子手段(6)と、
を備える縦編機(1)。
【請求項2】
前記縦編機(1)の動作のための前記主電子手段(8)が前記単一支持構造体(2)内に装着されることを特徴とする、請求項1に記載の縦編機。
【請求項3】
前記縦編機(1)の動作のための前記主電子手段(8)が、前記針床(3)及び前記糸ガイドバー(4)よりも低い高さで、前記単一支持構造体(2)の下部に得られる少なくとも1つのハウジング区画室(9)内に装着されることを特徴とする、請求項2に記載の縦編機。
【請求項4】
前記ハウジング区画室(9)が、前記単一支持構造体(2)の下部に得られるとともに、前記針床(3)及び前記糸ガイドバー(4)よりも下側に配置されることを特徴とする、請求項3に記載の縦編機。
【請求項5】
前記縦編機(1)の動作のための前記電気・電子手段(6)が、前記縦編機(1)の部品のための接続ケーブルを含み、全てが前記単一支持構造体(2)に対して完全に締結されることを特徴とする、請求項1〜4のいずれか一項に記載の縦編機。
【請求項6】
前記縦編機(1)の動作のための前記電気・電子手段(6)が、前記縦編機(1)の部品のための接続ケーブルを含み、前記単一支持構造体(2)と一体化されて内部に装着されることを特徴とする、請求項1〜5のいずれか一項に記載の縦編機。
【請求項7】
前記単一支持構造体(2)が、唯一の独立した構造であり、及び/又は、互いに一体に接続される複数の部品から成ることを特徴とする、請求項1〜6のいずれか一項に記載の縦編機。
【請求項8】
前記電気・電子手段(6)が、前記主電子手段(8)に対して接続されるユーザインタフェース電子手段(10)であって、前記下部(2a)よりも上側及び/又は前記下部(2a)よりも高い高さに配置される前記単一支持構造体(2)の中央部及び/又は側部(2b)で前記支持構造体(2)に対して締結されるユーザインタフェース電子手段(10)を更に備えることを特徴とする、請求項1〜7のいずれか一項に記載の縦編機。
【請求項9】
前記電気・電子手段(6)が、前記縦編機(1)の機械部品を制御するための副電子手段(11)を更に備え、副電子手段(11)が、前記主電子手段(8)に対して接続され且つ前記下部(2a)よりも上側及び/又は前記下部(2a)よりも高い高さに配置される前記単一支持構造体(2)の中央部及び/又は側部(2b)で前記支持構造体(2)に対して締結されることを特徴とする、請求項1〜8のいずれか一項に記載の縦編機。
【請求項10】
前記単一支持構造体(2)が、前記縦編機(1)を支持するようになっており、地面(18)に載置するための複数の脚部(13)を更に備えるとともに、前記単一支持構造体(2)の下部(2a)の下側に装着され且つ載置面(16a)を備える少なくとも1つの追加の減衰要素(16)を更に備え、前記載置面(16a)が、前記縦編機(1)が静止した状態で地面(18)から所定の距離(17)を隔てるように、また、前記縦編機の振動を減衰させるため、前記縦編機(1)の少なくとも一定の動作状態中に地面(18)と接触するように構成されることを特徴とする、請求項1〜9のいずれか一項に記載の縦編機。
【請求項11】
前記追加の減衰要素(16)の前記載置面(16a)が、前記縦編機(1)が静止した状態で前記脚部(13)の地面上の載置面(13a)から大きな距離(17)を隔てるように、また、前記縦編機(1)の少なくとも動作状態中に少なくとも前記脚部(13)の地面上の載置面(13a)の高さまで下降するように構成されることを特徴とする、請求項10に記載の縦編機。
【請求項12】
前記縦編機(1)が静止した状態での前記追加の減衰要素(16)の前記載置面(16a)と前記脚部(13)の地面上の載置面(13a)の高さとの間の距離(17)が、前記縦編機(1)の少なくとも一定の動作状態中に前記載置面(16a)へ伝えられる振動の振幅よりも小さいことを特徴とする、請求項10又は11に記載の縦編機。
【請求項13】
前記縦編機(1)が静止した状態での前記追加の減衰要素(16)の前記載置面(16a)と前記脚部(13)の地面上の載置面(13a)の高さとの間の距離(17)が1〜5mmの範囲であることを特徴とする、請求項10〜12のいずれか一項に記載の縦編機。
【請求項14】
前記追加の減衰要素(16)を複数備えることを特徴とする、請求項10〜13のいずれか一項に記載の縦編機。
【請求項15】
前記縦編機(1)を支持するために適切な地面(18)に載置するための複数の脚部(13)を備え、前記脚部(13)には振動減衰装置(14)が設けられることを特徴とする、請求項1〜14のいずれか一項に記載の縦編機。
【請求項16】
前記脚部(13)が、高さ調整でき、それによって単一支持構造体(2)及び前記縦編機(1)の地面(18)からの高さ及び/又は前記載置面(16a)の地面からの距離(17)を変えられることを特徴とする、請求項1〜15のいずれか一項に記載の縦編機。
【請求項17】
地面(18)に載置される下側載置面(16a)を有する複数の追加の減衰要素(16)を備えることを特徴とする、請求項16に記載の縦編機。
【請求項18】
前記追加の減衰要素(16)には、前記載置面(16a)に締結される振動減衰装置が設けられることを特徴とする、請求項10〜17のいずれか一項に記載の縦編機。
【請求項19】
前記単一支持構造体(2)が締結手段によって地面に結合されることを特徴とする、請求項1〜18のいずれか一項に記載の縦編機。
【請求項20】
前記縦編機(1)の動作のための前記電気・電子手段(6)、及び/又は、前記縦編機(1)の動作のための前記主電子手段8、及び/又は、前記縦編機(1)の機械部品の制御のための前記副電子手段(11)の少なくとも一部は、前記単一支持構造体との間に配置される振動減衰要素(12)によって前記単一支持構造体(2)に対して締結されることを特徴とする、請求項1〜19のいずれか一項に記載の縦編機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−293178(P2009−293178A)
【公開日】平成21年12月17日(2009.12.17)
【国際特許分類】
【外国語出願】
【出願番号】特願2009−71663(P2009−71663)
【出願日】平成21年3月24日(2009.3.24)
【出願人】(509082330)
【Fターム(参考)】
【公開日】平成21年12月17日(2009.12.17)
【国際特許分類】
【出願番号】特願2009−71663(P2009−71663)
【出願日】平成21年3月24日(2009.3.24)
【出願人】(509082330)
【Fターム(参考)】
[ Back to top ]