
繊維ウェブをニードリングするための装置
本発明は、繊維ウェブをニードリングするための装置であって、少なくとも1つのニードルビームが設けられている。ニードルビームは、下面で、複数のニードルを有するニードルボードを備えており、ニードルビームは、可動に保持されたビーム支持体を介してガイドされるようになっている。ビーム支持体は、鉛直方向駆動装置によって、上下運動で往復式に駆動される。ビーム支持体を直線ガイドするためのガイド装置が設けられており、ガイド装置は、少なくとも1つの揺れ腕を備えており、揺れ腕は、1端部で、回動支承部によって機械フレームに保持されている。ビーム支持体においてできるだけ真っ直ぐなガイド軌道を形成するために、本発明によれば、揺れ腕の、前記端部とは反対側の端部と、ビーム支持体とが、連結運動機構の複数の構成部材を介して、結合されている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1の上位概念に記載の、繊維ウェブをニードリング(ニードルパンチ)するための装置に関する。
【0002】
載設された繊維ウェブを硬化して構造化するために、繊維ウェブに多数のニードルを突き刺すことが公知であり、この場合ニードルは、上下往復運動でガイドされる。ニードルは平滑でなく、突刺方向に開いた鈎を備えているので、ニードルを繊維ウェブに突き刺す際に繊維ウェブの個々の繊維が取り出され、繊維ウェブの内側で交絡される。これによって繊維ウェブの内側で所望のフェルト効果および硬化が得られる。多数のニードルをガイドするために、ニードルがニードルビームの下面に配置されたニードリング装置が用いられる。ニードルビームは、可動のビーム支持体を介して保持され、ビーム支持体は、鉛直方向駆動装置によって、鉛直方向往復運動で駆動される。鉛直方向運動に際してニードルをできるだけ真っ直ぐに繊維ウェブに突き刺すために、公知であるが、ビーム支持体にガイド装置が係合し、ガイド装置によって、ビーム支持体の鉛直方向運動がガイドされる。
【0003】
たとえばドイツ連邦共和国特許出願公開第4431055号明細書において、繊維ウェブをニードリングするための装置が公知であり、ここではガイド装置が、揺れ腕によって形成されており、揺れ腕は、1端部で、回動支承部を介して機械フレームに保持され、この端部とは反対側の端部は、回動継手を介して、ビーム支持体に連結されている。ビーム支持体は、揺れ腕によって規定されたガイド軌道に沿ってガイドされる。ビーム支持体のガイド軌道は、ここでは円弧状である。円弧状のガイド軌道にもかかわらずニードルによる突刺通路を形成するために、曲がったニードルが用いられ、曲がったニードルは、ビーム支持体のガイド軌道に適合されている。
【0004】
米国特許第4241479号明細書において、繊維ウェブをニードリングするための別の装置が公知であり、ここではビーム支持体を直線ガイドするためのガイド装置は、2つの揺れ腕によって形成され、揺れ腕は、支持支承部において機械フレームに対して保持されている。支持支承部は、少なくとも1つの歯の隙間を備えており、隙間に、揺れ腕の、歯として形成された端部が係合する。公知の装置は、外向きに延びる揺れ腕を機械フレームにガイドするために比較的大きなスペースを必要としている。さらに揺れ腕と支持支承部との間の歯列における潤滑およびシールは特に問題となっている。
【0005】
欧州特許公開第0364105号明細書において、繊維ウェブをニードリングするための別の装置が公知であり、ここではガイド装置が、少なくとも1つのガイドロッドを備えており、ガイドロッドは、機械フレームに保持されたガイドブシュにガイドされている。ガイドロッドの自由端部は、ビーム支持体と結合されているので、ビーム支持体は、鉛直方向運動に際して、ガイドロッドとガイドブシュとによって規定されるガイド軌道を維持する。この公知のニードリング装置も同様にビーム支持体をガイドするための2つの部分から成る滑り対偶をベースとしており、その潤滑およびシールは特に問題となっており、ニードリング装置に関する大きな手間が要求される。
【0006】
背景技術において公知の、ビーム支持体を直線ガイドするためのガイド装置は、鉛直方向でのニードルビームの駆動しか許容しない。公知のガイド装置をビーム支持体の水平方向運動を行うように装備変更することは不可能であるか、もしくは極めて大きな手間につながる。
【0007】
本発明の課題は、冒頭で述べたような、繊維ウェブをニードリングするための装置を改良して、コンパクトで簡単な運動機構によって長手方向のビーム支持体の直線ガイドを実現するガイド装置を備えたものを提供することである。
【0008】
本発明の別の課題は、本発明による繊維ウェブをニードリングするための装置において、ビーム支持体を直線ガイドするためのガイド装置をフレキシブルで確実に機能するように形成することである。
【0009】
この課題は、本発明によれば、請求項1の特徴部に記載した構成手段を有する、繊維ウェブをニードリングするための装置によって解決される。
【0010】
本発明の有利な形態は、各従属請求項に記載した構成および構成の組み合わせによって規定した。
【0011】
本発明の利点によれば、機械フレームに対するビーム支持体の枢着が、回動支承部にガイドされる揺れ腕によって維持される。揺れ腕によって規定されるガイド軌道は、有利には、連結運動機構の介在によって変更され、ニードリングの要求に適合される。したがって本発明によれば、揺れ腕の反対側の端部は、連結機構の複数の構成部材を介してビーム支持体と結合されている。ニードルビームを直線ガイドするための、ビーム支持体に作用するガイド軌道は、揺れ腕と連結運動機構との協働によって規定することができる。
【0012】
本発明の別の有利な形態によれば、連結運動機構の構成部材は、枢着ロッドおよびフレームレバーによって形成されており、枢着ロッドは、回動継手を介して、ビーム支持体と結合されており、フレームレバーは、回動支承部によって、機械フレームに保持されている。したがってビーム支持体の鉛直方向運動は、専らガイド装置の回動可能なレバーによって受容し、ガイドすることができる。レバー手段の回動運動は、有利には回動支承部または回動継手によって実現されるので、ガイド装置全体は、トライボロジーを有している。回動支承部も回動継手も、周囲に対して、簡単にシールすることができるので、ビーム支持体の安定した確実なガイドが保証されている。
【0013】
連結運動機構の内側におけるフレームレバーの構成に応じて、ビーム支持体を直線ガイドするための様々なガイド軌道が実現される。1形態によれば、フレームレバーは、揺動レバーとして形成されており、揺動レバーは、中央部分で、回動支承部を備えている。揺動レバーは、1端部で、回動継手を介して、枢着ロッドと結合されていて、かつこの端部とは反対側の端部で、第2の回動継手を介して、揺れ腕と結合されている。枢着ロッドによって支持ビームに作用するガイド軌道は、枢着ロッドの長さと揺動レバーの長さとの調和に応じてほぼ真っ直ぐに形成することができる。
【0014】
できるだけ狭いスペースでビーム支持体の真っ直ぐなガイド軌道を形成するために、本発明の有利な形態によれば、フレームレバーは、第2の揺れ腕として形成されており、第1の揺れ腕および第2の揺れ腕は、回動継手を介してそれぞれ枢着ロッドと結合されている。回動支承部の位置ならびに揺れ腕の長さの選択によって、枢着ロッドとビーム支持体との間の枢着点は、最大鉛直方向運動行程にわたってほぼ真っ直ぐに形成することができる。本発明のこの形態は、特に繊維ウェブに高品質にニードリングするのに適している。多数のニードルは、ニードルビームで、繊維ウェブをニードリングするための鉛直方向の上下運動で正確にガイドされるので、繊維ウェブの内側で極めて均等なニードリング構造が形成される。
【0015】
揺れ腕の配置構造は、機械型式、組込性能ならびに所望のガイド特性に関して自由に選択することができる。したがって、たとえば揺れ腕の回動継手は、相互間隔を有して、枢着ロッドに形成されており、回動継手は、ビーム支持体と枢着ロッドとの間で、枢着ロッドの自由端部に、または枢着ロッドの中央部分に形成されている。
【0016】
特に有利には、本発明の別の形態によれば、揺れ腕の1つの回動支承部は、偏心支承部として、偏心軸の周りに形成されており、偏心軸は、運動装置によって選択的に駆動されるか、または固定されるようになっている。したがってビーム支持体において一定の水平方向運動を形成することができる。このために偏心軸は、運動装置によって駆動することができる。選択的に運動装置によって、偏心軸は、必要な場合に固定されるので、枢着ロッドによって形成された直線ガイドだけがビーム支持体に作用する。
【0017】
枢着ロッドの構成ならびに揺れ腕の回動継手の結合に応じて、揺れ腕の両方の回動支承部は、有利には相互間隔を有して、ビーム支持体の上方に配置されている。したがって特にコンパクトで省スペースのガイド装置を実現することができる。
【0018】
ビーム支持体のガイドの安定性を改善するために、本発明の有利な形態によれば、揺れ腕の両方の回動支承部は、ビーム支持体のビーム中央に対して対称的に配置されている。
【0019】
このためにビーム支持体は、枢着ロッドを結合するために、回動継手をビーム支持体のビーム中央に備えている。ビーム支持体の鉛直方向運動は、確実に安定して、直線ガイドのための枢着ロッドに伝達することができる。
【0020】
本発明によるニードリング装置の使用に関する特に高い融通性は、本発明の別の形態によって得られ、この場合、揺れ腕の回動支承部は、偏心支承部として、偏心軸の周りに形成されており、偏心軸は、運動装置によって選択的に駆動されるか、または固定されるようになっている。これによって選択的に、ビーム支持体において重畳した水平方向運動を行うことができるので、繊維ウェブの要求に応じて、定位置の偏心軸による水平方向運動なしに、または可動の偏心軸による水平方向運動でニードリング可能である。
【0021】
不織布ウェブの高品質のニードリングを達成するために、本発明の有利な形態によれば、鉛直方向駆動装置は、別個の偏心駆動装置を介して駆動される2つの連接棒がビーム支持体と結合されるように、形成される。このために偏心駆動装置は、それぞれクランク軸を備えており、クランク軸は、連接棒ヘッドを介して連接棒と結合されている。連接棒は、連接棒環部で、回動継手を介して、ビーム支持体と結合されている。このような鉛直方向駆動装置によって、ニードルビームの調節およびガイドにおいて高い融通性が提供され、これによって異なる繊維を備えた様々な繊維ウェブに製品固有の方法でニードリングすることができる。
【0022】
このような鉛直方向駆動装置の構成では、揺れ腕と、ガイド装置の連結運動機構とは、鉛直方向駆動装置の連接棒の間に配置されており、これによって極めて狭い機械構造が得られる。選択的に揺れ腕および連結運動機構は、鉛直方向駆動装置の傍に配置することもでき、これによってたとえばガイド装置を側方に設置することができる。
【0023】
本発明によるニードリング装置は、相応の長いニードルボードを備えた大きな作業幅を実現するために、有利には、機械内で並んで配置された複数の鉛直方向駆動装置を備えており、鉛直方向駆動装置は、まとめてビーム支持体に作用する。この場合有利には、各鉛直方向駆動装置に直線ガイドがそれぞれ対応して配置されており、直線ガイドの揺れ腕は、それぞれ連結機構を介してビーム支持体と結合されている。
【0024】
ニードルビームの重畳した水平方向運動は、有利には、本発明による別の形態によって実現され、この場合、鉛直方向駆動装置は、両方のクランク軸を位相調節するための位相調節装置を備えている。この場合クランク軸は、位相角度だけ変位して駆動することができるので、ビーム支持体は、揺動運動を行い、揺動運動は、鉛直方向の間隔によって、ニードルに、鉛直方向運動の他に水平方向運動をもたらす。この別の形態は、小さく、無段階に調節可能な水平方向運動をニードルビームに行うために特に有利である。
【0025】
以下に、図面に基づいて、本発明を詳説する。
【図面の簡単な説明】
【0026】
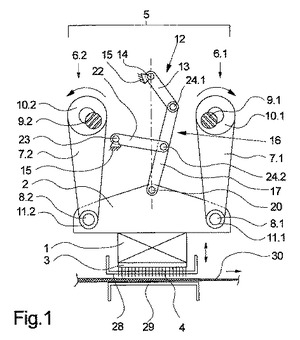
【図1】本発明によるニードリング装置の第1形態を示す側面図である。
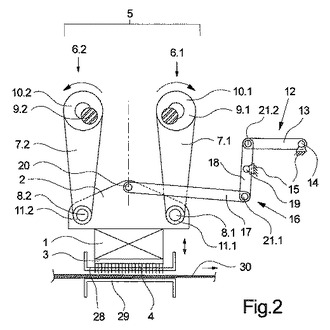
【図2】本発明によるニードリング装置の別の1形態を示す側面図である。
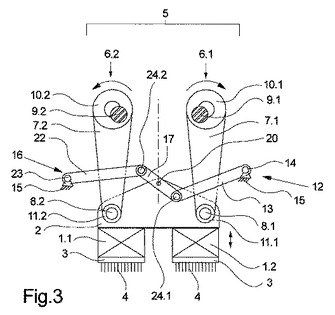
【図3】本発明によるニードリング装置の別の1形態を示す側面図である。
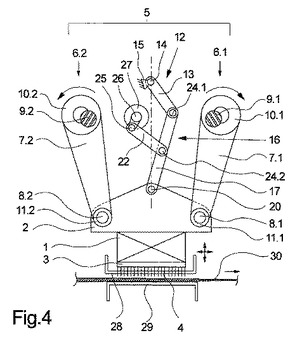
【図4】本発明によるニードリング装置の別の1形態を示す側面図である。
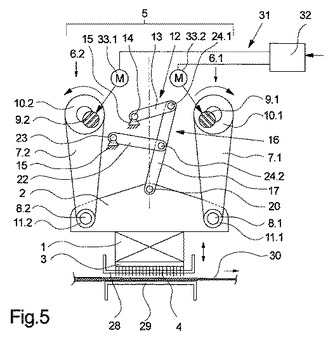
【図5】本発明によるニードリング装置の別の1形態を示す側面図である。
【0027】
図1には、本発明による、繊維ウェブをニードリングするための装置の第1形態を示した。図1に示した、本発明によるニードリング装置の第1形態では、ビーム支持体2が設けられており、ビーム支持体2は、下面で、ニードルビーム1を保持している。ニードルビーム1は、下面で、多数のニードル4を備えたニードルボード3を保持している。ニードル4を備えたニードルボード3に、載置プレート29と引き離し部材としての分離部材28が対応して配置されており、ここでは載置プレート29と分離部材28との間に、概ね一定の送り速度で繊維ウェブ30がガイドされる。繊維ウェブ30の運動方向は、矢印で示した。
【0028】
ビーム支持体2に、鉛直方向駆動装置5が作用する。鉛直方向駆動装置5によって、ビーム支持体2は、鉛直方向に往復運動されるので、ニードルビーム1は、ニードルボード3と共に、上下運動を行う。鉛直方向駆動装置5は、本形態では、平行に配置された2つの偏心駆動装置6.1,6.2によって形成されている。偏心駆動装置6.1,6.2は、平行に配置された2つのクランク軸9.1,9.2を備えており、クランク軸9.1,9.2は、ビーム支持体2の上方に配置されている。クランク軸9.1,9.2は、それぞれ少なくとも1つの連接棒を収容するための少なくとも1つの偏心区分を備えている。図1には、ビーム支持体2に配置された連接棒7.1,7.2を示しており、連接棒7.1,7.2は、連接棒ヘッド10.1,10.2で、クランク軸9.1,9,2に保持されている。連接棒7.1,7.2は、反対側に位置する連接棒環部11.1,11.2で、2つの連接棒回動継手8.1,8.2を介してビーム支持体2と結合されている。クランク軸9.1は、連接棒7.1と共に、またクランク軸9.2は、連接棒7.2と共に、それぞれ偏心駆動装置6.1,6.2を形成し、これによってビーム支持体2は、上下運動でガイドされる。クランク軸9.1,9.2は、同方向または逆方向に同期して駆動されるので、ビーム支持体2は、少なくともほぼ平行にガイドされるようになっている。
【0029】
ビーム支持体2の鉛直方向運動をガイドするために、ガイド装置12が設けられており、ガイド装置12は、本形態では、揺れ腕13を備えており、揺れ腕13は、回動支承部14を介して、機械フレーム15と結合されている。揺れ腕13の自由端部は、連結運動機構16を介して、ビーム支持体2と結合されている。連結運動機構16は、本形態では、枢着ロッド17と第2の揺れ腕22とによって形成されている。第2の揺れ腕22は、第1の揺れ腕13に対して間隔を有して、第2の回動支承部23によって、機械フレーム15と回動可能に保持されている。第1の揺れ腕13の自由端部と、第2の揺れ腕22の自由端部とは、相互間隔を有して、それぞれ回動継手24.1,24.2を介して、枢着ロッド17と連結されている。回動継手24.1,24.2は、枢着ロッド17の端部区分に形成されている。反対側の端部区分で、枢着ロッド17は、回動継手20によって、ビーム支持体2と結合されている。回動継手20は、ビーム支持体2のビーム中央に形成されている。
【0030】
揺れ腕13、および連結運動機構16の構成部材は、ビーム支持体2の上方に配置されている。このために機械フレーム15に設けられた回動支承部14,23は、鉛直方向駆動装置5の連接棒7.1,7.2の間に配置されている。これによって極めてコンパクトで狭い構造が得られる。したがって鉛直方向駆動装置5およびガイド装置12は、ビーム支持体2の上方にコンパクトな構造ユニットを形成する。
【0031】
回動支承部14,23の位置ならびに第1の揺れ腕13および第2の揺れ腕22の長さは、枢着ロッド17が、ビーム支持体2の枢着点(枢着点は回動継手20によって特定される)で、鉛直方向駆動装置5の往復運動行程全体にわたって鉛直方向にビーム支持体2の真っ直ぐなガイドが行われるように、選択されている。ビーム支持体2の直線ガイドは、有利には機械フレーム15に対して、専らガイド装置12の構成部分が回動運動することによって実現される。回動支承部14,23ならびに回動継手24.1,24.2は、僅かな摩擦で形成されているので、全体としてビーム支持体2の僅かな摩擦の直線ガイドが存在し、鉛直方向駆動装置5による追加的なトルクは必要としない。回動支承部14,23および回動継手20,24.1,24.2の使用は、市販の潤滑系が使用できるので極めて有利であり、潤滑系は、周囲に対してシールされているので、残留潤滑剤が周囲に達することはない。
【0032】
運転中、鉛直方向駆動装置5のクランク軸9.1,9.2は、有利には、逆向きの回動方向で同じ回動数で駆動される。連接棒7.1,7.2によって、クランク軸9.1,9.2の運動は、ビーム支持体2に伝達され、ビーム支持体2は、上下運動を行う。ビーム支持体2の鉛直方向運動は、ガイド装置12の枢着ロッド17を介して受容され、揺れ腕13,22に伝達される。回動支承部14,23に取り付けられた揺れ腕13,22は、回動運動を行う。揺れ腕13、揺れ腕22および枢着ロッド17の運動機構は、枢着ロッド17の自由端部が回動継手20で鉛直方向運動するように選択されている。したがってビーム支持体2は、鉛直方向駆動装置5の上下運動行程全体にわたって、真っ直ぐなガイド軌道に沿って保持される。
【0033】
図1に示した形態では、連結運動機構16の構成部材は、ビーム支持体2に揺れ腕13を結合するために、たとえば枢着ロッドおよび第2の揺れ腕として形成されている。原則として、連結運動機構16の構成部材は、別のレバー構成によって実現してもよい。
【0034】
本発明によるニードリング装置の、図2に示した形態は、回動支承部を介して機械フレームに取り付けられた揺れ腕を、連結運動機構を介して、ビーム支持体を直線ガイドするためにビーム支持体と結合する別の1構成を成している。
【0035】
図2に示した形態は、鉛直方向駆動装置5、ビーム支持体2ならびにビーム支持体2によって保持された装置の構造および形状において、前述の形態と同じであり、したがって前述の記載が適用される。図1に示した形態に対して、図2に示した形態では、ガイド装置12は、大体において連接棒7.1,7.2の側方に配置されている。ガイド装置12は、1つの揺れ腕13を備えており、揺れ腕13は、回動支承部14において機械フレーム15に取り付けられている。揺れ腕13は、回動支承部14に回動可能に支承されている。
【0036】
ビーム支持体2に揺れ腕13を結合するために、連結運動機構16は、揺動レバー18および枢着ロッド17によって形成されている。揺動レバー18は、ビーム支持体2の斜め上で、回動支承部19において機械フレーム15に保持されている。揺動レバー18は、回動支承部19に枢着式に取り付けられているので、上位の自由端部と下位の自由端部とは、回動支承部19に対して相対的に旋回可能である。揺動レバー18の上位の自由端部は、回動継手21.2を介して、揺れ腕13の自由端部と枢着式に結合されている。揺動レバー18の下位端部は、回動継手21.1を介して、枢着ロッド17と枢着式に連結されている。枢着ロッド17は、自由端部で、ビーム支持体2の中央まで延びており、そこで回動継手20を介してビーム支持体2と枢着式に結合されている。
【0037】
鉛直方向駆動装置5によって駆動されるビーム支持体2の鉛直方向運動は、枢着ロッド17を介して、ガイド装置12の運動機構によって規定されるガイド軌道上に維持される。枢着ロッド17の長さに応じて、ビーム支持体2は、ほぼ真っ直ぐなガイド軌道に沿ってガイドすることができる。ここでもビームビーム支持体2の並進運動は、専らガイド装置15の構成部分の回動運動によってガイドされる。
【0038】
本発明によるニードリング装置の、図2に示した形態は、ビーム支持体を、選択的に水平方向往復運動と重畳して駆動するのに適している。このために揺れ腕13の回動支承部14は、偏心支承部および偏心軸によって代用され、偏心支承部および偏心軸は、揺れ腕13における水平方向往復運動を導入するための運動装置を介して駆動される。したがって水平方向往復運動を伝達するための直線ガイドが用いられる。ビーム支持体を専ら鉛直方向往復運動で駆動しようとする場合、偏心軸は固定されるので、偏心支承部は、専ら揺れ腕の回動支承部として用いられる。したがって揺れ腕に、水平方向運動は導入されない。
【0039】
図3には、本発明によるニードリング装置の別の形態を概略側面図で示した。図3に示した形態は、図1に示した形態と大体において同一であるので、ここでは、違いについて説明するにとどめ、その他の点については前述の説明が適用される。
【0040】
図3に示した形態では、ビーム支持体2にそれぞれ2つのニードルビーム1.1,1.2が保持されており、ニードルビーム1.1,1.2は、それぞれ下面で、ニードルボード3および多数のニードル4を支持する。ビーム支持体2は、鉛直方向駆動装置5と連結されており、鉛直方向駆動装置5は、前述の形態と同様に形成されている。ビーム支持体2の直線ガイドのために、ガイド装置12が設けられており、ガイド装置12は、第1の揺れ腕13と第2の揺れ腕22とから形成されている。第1の揺れ腕13は、回動支承部14を介して機械フレーム15に取り付けられている。このために回動支承部14は、側方でビーム支持体2の傍に配置されている。第2の揺れ腕22は、回動支承部23において保持されており、回動支承部23は、ビーム支持体2とは反対側で機械フレーム15に配置されている。第1の揺れ腕13ならびに第2の揺れ腕22は、それぞれビーム支持体2のビーム中央に向かって対向するように延びている。ビーム支持体2の中央部分に、枢着ロッド17が設けられており、枢着ロッド17は、中央部分で、回動継手20を介してビーム支持体2と結合されている。枢着ロッド17の自由端部は、回動支承部24.1,24.2を介して、第1の揺れ腕13、第2の揺れ腕22と連結されている。
【0041】
図3に示したガイド装置12では、揺れ腕13,22は、同じ長さを有している。ビーム支持体2に対する枢着ロッド17の枢着点で、揺れ腕13,22の回動運動によって生じるガイド軌道を維持するために、揺れ腕13,22は、ビーム支持体2に対して異なる角度位置で配置されている。したがって回動継手20によって規定された枢着ロッド17の枢着点に、ビーム支持体2の鉛直運動中にほぼ真っ直ぐなガイド軌道を形成することができる。
【0042】
ガイド装置12ならびに回動支承部14,23による機械フレーム15における両側の枢着の対称的な配置構造によって、ビーム支持体2の極めて安定したガイドが達成される。
【0043】
本発明によるニードリング装置の前述の形態は、繊維ウェブをニードリングするのに適しており、ここではニードルは、鉛直方向で上下運動を行う。ビーム支持体の直線ガイドによって、ニードルはできるだけ正確な鉛直方向運動を行う。
【0044】
ニードルが、繊維ウェブをニードリングするために、純粋な鉛直方向運動の他に、重畳する水平方向運動を行う必要がある場合、ガイド装置12は、有利には、選択的にビーム支持体2が上下運動の他に水平方向往復運動を行うように、拡張することができる。図4には、本発明による1形態を概略側面図で示した。本形態は、図1に示した形態と同一であるので、前述の説明が適用され、以下に違いについて説明するにとどめる。
【0045】
図1に示した形態に対して、図4に示した形態では、ガイド装置12の内側において、第2の揺れ腕22の回動支承部は、偏心支承部25によって代用されている。偏心支承部25は、偏心軸26に形成されており、偏心軸26は、回転して、揺れ腕22を駆動する。偏心軸26は、運動装置27と連結されており、運動装置27によって、偏心軸26は、選択的にその位置で固定されるか、または駆動される。
【0046】
固定された偏心軸26では、揺れ腕22は、偏心支承部25によって固定され、専ら偏心支承部25を中心とした回動運動でガイドされる。この状態で、枢着ロッド17は、ビーム支持体2に対して専らビーム支持体の鉛直方向運動をガイドするように働く。枢着ロッド17の自由端部は、回動継手20で、有利には鉛直線に沿ってガイドされるので、ビーム支持体2は、鉛直方向運動の間、真っ直ぐにガイドされる。
【0047】
運動装置27が偏心軸26を駆動する場合、ビーム支持体2は、鉛直方向運動に重畳して一定の水平方向運動で駆動される。枢着ロッド17は、押圧ロッドとして機能し、ビーム支持体2を、回動継手20を介して、重畳した水平方向運動でガイドする。ビーム支持体2ひいてはニードルビーム1は、楕円の運動を行う。偏心軸26の回転数と鉛直方向駆動装置5のクランク軸9.1,9.2の回転数とは、この場合同じであるので、偏心軸26の偏心度に関係する水平方向運動行程が、ニードルビーム1に形成される。
【0048】
図4に示した形態では、ビーム支持体2における重畳した水平方向運動を実現するために、選択的に揺れ腕13の回動支承部14を偏心軸の設けられた偏心支承部によって形成することもできるので、偏心軸を駆動する際に、揺れ腕13を介して、水平方向運動成分が導入される。第2の揺れ腕22は、回動支承部で、機械フレームにガイドされる。両方の揺れ腕を偏心軸に保持することもでき、この場合偏心軸は、運動装置によって、選択的に駆動可能であるか、または固定可能である。
【0049】
したがって繊維ウェブをニードリングするための本発明による装置によって、ニードルビームをガイドしかつ駆動するために高い融通性が提供される。特に均等な繊維構造を有する高品質の繊維製品を製造するために、純粋な鉛直方向のニードリングを実現することができる。
【0050】
図5には、本発明による装置の別の形態を概略側面図で示した。図5に示した形態は、鉛直方向駆動装置5を除いて、図1に示した形態と同一であるので、ここでは鉛直方向駆動装置の相違点について言及するにとどめ、その他の点については前述の説明が適用される。
【0051】
図5に示した形態では、鉛直方向駆動装置に、位相調節装置31が対応して配置されている。位相調節装置31は、2つの調節モータ33.1,33.2を備えており、調節モータ33.1,33.2は、クランク軸9.1,9,2に対応して配置されている。調節モータ33.1,33.2は、制御装置32と接続されている。制御装置32を介して、調節モータ33.1,33.2はそれぞれ独立して作動させることができ、これによってクランク軸9.1,9,2はその位置に関して相対回動することができる。したがってクランク軸9.1,9,2の間の位相位置は、任意に調節することができる。これによってビーム支持体2において、ニードルビーム1の純粋な鉛直方向の上下運動の他に、重畳した水平方向運動を行うことができる。したがってクランク軸9.1,9,2の同位相ならびに両クランク軸の同期駆動において、ほぼ鉛直の上下運動が行われる。クランク軸9.1,9,2の位相位置が変位する場合、連接棒7.1,7.2を介して、ビーム支持体2に斜め姿勢が導入され、斜め姿勢は、後続の運動で、繊維ウェブ30の運動方向に向けられた運動成分を形成する。クランク軸9.1,9,2の間の位相調節の大きさは、直に水平方向運動の運動行程長さに対して比例的である。水平方向運動の運動行程は、クランク軸9.1,9,2の位相差角に関して無段階に調節することができる。
【0052】
位相調節装置31は、選択的に、調節モータと、クランク軸9.1,9.2に作用する調節伝動装置とによって形成することもできる。ここで言及しておくと、クランク軸9.1,9,2は、位相角で相互に変位して駆動されており、これによって、繊維ウェブをニードリングするために、鉛直方向運動の他に水平方向運動を行うことができる。
【0053】
ビーム支持体の運動のガイドは、ここでもガイド装置12によっても行われ、ガイド装置12は、図1に示した形態と同様に、揺れ腕13と、連接棒17と第2の揺れ腕22とから形成された連結運動機構16とによって形成される。
【0054】
本発明による繊維ウェブをニードリングするための装置の、図1〜図4に示した形態は、ビーム支持体を直線ガイドするためのガイド装置の構造および形状において例示したものに過ぎない。原則として、連結運動機構は、揺れ腕をビーム支持体と連結するために3つ以上の構成部材を備えていてもよい。同様に1つのビーム支持体に複数の鉛直方向駆動装置が同時に作用してもよい。この場合各鉛直方向駆動装置または鉛直方向駆動装置群に、複数の直線ガイドが対応して配置されている。
【符号の説明】
【0055】
1.1,1.2 ニードルビーム、 2 ビーム支持体、 3 ニードルボード、 4 ニードル、 5 鉛直方向駆動装置、 6.1,6.2 偏心駆動装置、 7.1,7.2 連接棒、 8.1,8.2 連接棒回動継手、 9.1,9.2 クランク軸、 10.1,10.2 連接棒ヘッド、 11.1,11.2 連接棒環部、 12 ガイド装置、 13 第1の揺れ腕、 14 回動支承部(第1の揺れ腕)、 15 機械フレーム、 16 連結運動機構、 17 枢着ロッド、 18 揺動レバー、 19 回動支承部、 20 回動継手(枢着ロッド/ビーム支持体)、 21.1 回動継手(揺動レバー)、 21.2 回動継手(揺動レバー/揺れ腕)、 22 第2の揺れ腕、 23 回動支承部(第2の揺れ腕)、 24.1 回動継手(枢着ロッド/ビーム支持体)、 24.2 回動継手(枢着ロッド/第2の揺れ腕)、 25 偏心支承部、 26 偏心軸、 27 運動装置、 28 分離部材、 29 載置プレート、 30 繊維ウェブ、 31 位相調節装置、 32 制御装置、 33.1,33.2 調節モータ
【技術分野】
【0001】
本発明は、請求項1の上位概念に記載の、繊維ウェブをニードリング(ニードルパンチ)するための装置に関する。
【0002】
載設された繊維ウェブを硬化して構造化するために、繊維ウェブに多数のニードルを突き刺すことが公知であり、この場合ニードルは、上下往復運動でガイドされる。ニードルは平滑でなく、突刺方向に開いた鈎を備えているので、ニードルを繊維ウェブに突き刺す際に繊維ウェブの個々の繊維が取り出され、繊維ウェブの内側で交絡される。これによって繊維ウェブの内側で所望のフェルト効果および硬化が得られる。多数のニードルをガイドするために、ニードルがニードルビームの下面に配置されたニードリング装置が用いられる。ニードルビームは、可動のビーム支持体を介して保持され、ビーム支持体は、鉛直方向駆動装置によって、鉛直方向往復運動で駆動される。鉛直方向運動に際してニードルをできるだけ真っ直ぐに繊維ウェブに突き刺すために、公知であるが、ビーム支持体にガイド装置が係合し、ガイド装置によって、ビーム支持体の鉛直方向運動がガイドされる。
【0003】
たとえばドイツ連邦共和国特許出願公開第4431055号明細書において、繊維ウェブをニードリングするための装置が公知であり、ここではガイド装置が、揺れ腕によって形成されており、揺れ腕は、1端部で、回動支承部を介して機械フレームに保持され、この端部とは反対側の端部は、回動継手を介して、ビーム支持体に連結されている。ビーム支持体は、揺れ腕によって規定されたガイド軌道に沿ってガイドされる。ビーム支持体のガイド軌道は、ここでは円弧状である。円弧状のガイド軌道にもかかわらずニードルによる突刺通路を形成するために、曲がったニードルが用いられ、曲がったニードルは、ビーム支持体のガイド軌道に適合されている。
【0004】
米国特許第4241479号明細書において、繊維ウェブをニードリングするための別の装置が公知であり、ここではビーム支持体を直線ガイドするためのガイド装置は、2つの揺れ腕によって形成され、揺れ腕は、支持支承部において機械フレームに対して保持されている。支持支承部は、少なくとも1つの歯の隙間を備えており、隙間に、揺れ腕の、歯として形成された端部が係合する。公知の装置は、外向きに延びる揺れ腕を機械フレームにガイドするために比較的大きなスペースを必要としている。さらに揺れ腕と支持支承部との間の歯列における潤滑およびシールは特に問題となっている。
【0005】
欧州特許公開第0364105号明細書において、繊維ウェブをニードリングするための別の装置が公知であり、ここではガイド装置が、少なくとも1つのガイドロッドを備えており、ガイドロッドは、機械フレームに保持されたガイドブシュにガイドされている。ガイドロッドの自由端部は、ビーム支持体と結合されているので、ビーム支持体は、鉛直方向運動に際して、ガイドロッドとガイドブシュとによって規定されるガイド軌道を維持する。この公知のニードリング装置も同様にビーム支持体をガイドするための2つの部分から成る滑り対偶をベースとしており、その潤滑およびシールは特に問題となっており、ニードリング装置に関する大きな手間が要求される。
【0006】
背景技術において公知の、ビーム支持体を直線ガイドするためのガイド装置は、鉛直方向でのニードルビームの駆動しか許容しない。公知のガイド装置をビーム支持体の水平方向運動を行うように装備変更することは不可能であるか、もしくは極めて大きな手間につながる。
【0007】
本発明の課題は、冒頭で述べたような、繊維ウェブをニードリングするための装置を改良して、コンパクトで簡単な運動機構によって長手方向のビーム支持体の直線ガイドを実現するガイド装置を備えたものを提供することである。
【0008】
本発明の別の課題は、本発明による繊維ウェブをニードリングするための装置において、ビーム支持体を直線ガイドするためのガイド装置をフレキシブルで確実に機能するように形成することである。
【0009】
この課題は、本発明によれば、請求項1の特徴部に記載した構成手段を有する、繊維ウェブをニードリングするための装置によって解決される。
【0010】
本発明の有利な形態は、各従属請求項に記載した構成および構成の組み合わせによって規定した。
【0011】
本発明の利点によれば、機械フレームに対するビーム支持体の枢着が、回動支承部にガイドされる揺れ腕によって維持される。揺れ腕によって規定されるガイド軌道は、有利には、連結運動機構の介在によって変更され、ニードリングの要求に適合される。したがって本発明によれば、揺れ腕の反対側の端部は、連結機構の複数の構成部材を介してビーム支持体と結合されている。ニードルビームを直線ガイドするための、ビーム支持体に作用するガイド軌道は、揺れ腕と連結運動機構との協働によって規定することができる。
【0012】
本発明の別の有利な形態によれば、連結運動機構の構成部材は、枢着ロッドおよびフレームレバーによって形成されており、枢着ロッドは、回動継手を介して、ビーム支持体と結合されており、フレームレバーは、回動支承部によって、機械フレームに保持されている。したがってビーム支持体の鉛直方向運動は、専らガイド装置の回動可能なレバーによって受容し、ガイドすることができる。レバー手段の回動運動は、有利には回動支承部または回動継手によって実現されるので、ガイド装置全体は、トライボロジーを有している。回動支承部も回動継手も、周囲に対して、簡単にシールすることができるので、ビーム支持体の安定した確実なガイドが保証されている。
【0013】
連結運動機構の内側におけるフレームレバーの構成に応じて、ビーム支持体を直線ガイドするための様々なガイド軌道が実現される。1形態によれば、フレームレバーは、揺動レバーとして形成されており、揺動レバーは、中央部分で、回動支承部を備えている。揺動レバーは、1端部で、回動継手を介して、枢着ロッドと結合されていて、かつこの端部とは反対側の端部で、第2の回動継手を介して、揺れ腕と結合されている。枢着ロッドによって支持ビームに作用するガイド軌道は、枢着ロッドの長さと揺動レバーの長さとの調和に応じてほぼ真っ直ぐに形成することができる。
【0014】
できるだけ狭いスペースでビーム支持体の真っ直ぐなガイド軌道を形成するために、本発明の有利な形態によれば、フレームレバーは、第2の揺れ腕として形成されており、第1の揺れ腕および第2の揺れ腕は、回動継手を介してそれぞれ枢着ロッドと結合されている。回動支承部の位置ならびに揺れ腕の長さの選択によって、枢着ロッドとビーム支持体との間の枢着点は、最大鉛直方向運動行程にわたってほぼ真っ直ぐに形成することができる。本発明のこの形態は、特に繊維ウェブに高品質にニードリングするのに適している。多数のニードルは、ニードルビームで、繊維ウェブをニードリングするための鉛直方向の上下運動で正確にガイドされるので、繊維ウェブの内側で極めて均等なニードリング構造が形成される。
【0015】
揺れ腕の配置構造は、機械型式、組込性能ならびに所望のガイド特性に関して自由に選択することができる。したがって、たとえば揺れ腕の回動継手は、相互間隔を有して、枢着ロッドに形成されており、回動継手は、ビーム支持体と枢着ロッドとの間で、枢着ロッドの自由端部に、または枢着ロッドの中央部分に形成されている。
【0016】
特に有利には、本発明の別の形態によれば、揺れ腕の1つの回動支承部は、偏心支承部として、偏心軸の周りに形成されており、偏心軸は、運動装置によって選択的に駆動されるか、または固定されるようになっている。したがってビーム支持体において一定の水平方向運動を形成することができる。このために偏心軸は、運動装置によって駆動することができる。選択的に運動装置によって、偏心軸は、必要な場合に固定されるので、枢着ロッドによって形成された直線ガイドだけがビーム支持体に作用する。
【0017】
枢着ロッドの構成ならびに揺れ腕の回動継手の結合に応じて、揺れ腕の両方の回動支承部は、有利には相互間隔を有して、ビーム支持体の上方に配置されている。したがって特にコンパクトで省スペースのガイド装置を実現することができる。
【0018】
ビーム支持体のガイドの安定性を改善するために、本発明の有利な形態によれば、揺れ腕の両方の回動支承部は、ビーム支持体のビーム中央に対して対称的に配置されている。
【0019】
このためにビーム支持体は、枢着ロッドを結合するために、回動継手をビーム支持体のビーム中央に備えている。ビーム支持体の鉛直方向運動は、確実に安定して、直線ガイドのための枢着ロッドに伝達することができる。
【0020】
本発明によるニードリング装置の使用に関する特に高い融通性は、本発明の別の形態によって得られ、この場合、揺れ腕の回動支承部は、偏心支承部として、偏心軸の周りに形成されており、偏心軸は、運動装置によって選択的に駆動されるか、または固定されるようになっている。これによって選択的に、ビーム支持体において重畳した水平方向運動を行うことができるので、繊維ウェブの要求に応じて、定位置の偏心軸による水平方向運動なしに、または可動の偏心軸による水平方向運動でニードリング可能である。
【0021】
不織布ウェブの高品質のニードリングを達成するために、本発明の有利な形態によれば、鉛直方向駆動装置は、別個の偏心駆動装置を介して駆動される2つの連接棒がビーム支持体と結合されるように、形成される。このために偏心駆動装置は、それぞれクランク軸を備えており、クランク軸は、連接棒ヘッドを介して連接棒と結合されている。連接棒は、連接棒環部で、回動継手を介して、ビーム支持体と結合されている。このような鉛直方向駆動装置によって、ニードルビームの調節およびガイドにおいて高い融通性が提供され、これによって異なる繊維を備えた様々な繊維ウェブに製品固有の方法でニードリングすることができる。
【0022】
このような鉛直方向駆動装置の構成では、揺れ腕と、ガイド装置の連結運動機構とは、鉛直方向駆動装置の連接棒の間に配置されており、これによって極めて狭い機械構造が得られる。選択的に揺れ腕および連結運動機構は、鉛直方向駆動装置の傍に配置することもでき、これによってたとえばガイド装置を側方に設置することができる。
【0023】
本発明によるニードリング装置は、相応の長いニードルボードを備えた大きな作業幅を実現するために、有利には、機械内で並んで配置された複数の鉛直方向駆動装置を備えており、鉛直方向駆動装置は、まとめてビーム支持体に作用する。この場合有利には、各鉛直方向駆動装置に直線ガイドがそれぞれ対応して配置されており、直線ガイドの揺れ腕は、それぞれ連結機構を介してビーム支持体と結合されている。
【0024】
ニードルビームの重畳した水平方向運動は、有利には、本発明による別の形態によって実現され、この場合、鉛直方向駆動装置は、両方のクランク軸を位相調節するための位相調節装置を備えている。この場合クランク軸は、位相角度だけ変位して駆動することができるので、ビーム支持体は、揺動運動を行い、揺動運動は、鉛直方向の間隔によって、ニードルに、鉛直方向運動の他に水平方向運動をもたらす。この別の形態は、小さく、無段階に調節可能な水平方向運動をニードルビームに行うために特に有利である。
【0025】
以下に、図面に基づいて、本発明を詳説する。
【図面の簡単な説明】
【0026】
【図1】本発明によるニードリング装置の第1形態を示す側面図である。
【図2】本発明によるニードリング装置の別の1形態を示す側面図である。
【図3】本発明によるニードリング装置の別の1形態を示す側面図である。
【図4】本発明によるニードリング装置の別の1形態を示す側面図である。
【図5】本発明によるニードリング装置の別の1形態を示す側面図である。
【0027】
図1には、本発明による、繊維ウェブをニードリングするための装置の第1形態を示した。図1に示した、本発明によるニードリング装置の第1形態では、ビーム支持体2が設けられており、ビーム支持体2は、下面で、ニードルビーム1を保持している。ニードルビーム1は、下面で、多数のニードル4を備えたニードルボード3を保持している。ニードル4を備えたニードルボード3に、載置プレート29と引き離し部材としての分離部材28が対応して配置されており、ここでは載置プレート29と分離部材28との間に、概ね一定の送り速度で繊維ウェブ30がガイドされる。繊維ウェブ30の運動方向は、矢印で示した。
【0028】
ビーム支持体2に、鉛直方向駆動装置5が作用する。鉛直方向駆動装置5によって、ビーム支持体2は、鉛直方向に往復運動されるので、ニードルビーム1は、ニードルボード3と共に、上下運動を行う。鉛直方向駆動装置5は、本形態では、平行に配置された2つの偏心駆動装置6.1,6.2によって形成されている。偏心駆動装置6.1,6.2は、平行に配置された2つのクランク軸9.1,9.2を備えており、クランク軸9.1,9.2は、ビーム支持体2の上方に配置されている。クランク軸9.1,9.2は、それぞれ少なくとも1つの連接棒を収容するための少なくとも1つの偏心区分を備えている。図1には、ビーム支持体2に配置された連接棒7.1,7.2を示しており、連接棒7.1,7.2は、連接棒ヘッド10.1,10.2で、クランク軸9.1,9,2に保持されている。連接棒7.1,7.2は、反対側に位置する連接棒環部11.1,11.2で、2つの連接棒回動継手8.1,8.2を介してビーム支持体2と結合されている。クランク軸9.1は、連接棒7.1と共に、またクランク軸9.2は、連接棒7.2と共に、それぞれ偏心駆動装置6.1,6.2を形成し、これによってビーム支持体2は、上下運動でガイドされる。クランク軸9.1,9.2は、同方向または逆方向に同期して駆動されるので、ビーム支持体2は、少なくともほぼ平行にガイドされるようになっている。
【0029】
ビーム支持体2の鉛直方向運動をガイドするために、ガイド装置12が設けられており、ガイド装置12は、本形態では、揺れ腕13を備えており、揺れ腕13は、回動支承部14を介して、機械フレーム15と結合されている。揺れ腕13の自由端部は、連結運動機構16を介して、ビーム支持体2と結合されている。連結運動機構16は、本形態では、枢着ロッド17と第2の揺れ腕22とによって形成されている。第2の揺れ腕22は、第1の揺れ腕13に対して間隔を有して、第2の回動支承部23によって、機械フレーム15と回動可能に保持されている。第1の揺れ腕13の自由端部と、第2の揺れ腕22の自由端部とは、相互間隔を有して、それぞれ回動継手24.1,24.2を介して、枢着ロッド17と連結されている。回動継手24.1,24.2は、枢着ロッド17の端部区分に形成されている。反対側の端部区分で、枢着ロッド17は、回動継手20によって、ビーム支持体2と結合されている。回動継手20は、ビーム支持体2のビーム中央に形成されている。
【0030】
揺れ腕13、および連結運動機構16の構成部材は、ビーム支持体2の上方に配置されている。このために機械フレーム15に設けられた回動支承部14,23は、鉛直方向駆動装置5の連接棒7.1,7.2の間に配置されている。これによって極めてコンパクトで狭い構造が得られる。したがって鉛直方向駆動装置5およびガイド装置12は、ビーム支持体2の上方にコンパクトな構造ユニットを形成する。
【0031】
回動支承部14,23の位置ならびに第1の揺れ腕13および第2の揺れ腕22の長さは、枢着ロッド17が、ビーム支持体2の枢着点(枢着点は回動継手20によって特定される)で、鉛直方向駆動装置5の往復運動行程全体にわたって鉛直方向にビーム支持体2の真っ直ぐなガイドが行われるように、選択されている。ビーム支持体2の直線ガイドは、有利には機械フレーム15に対して、専らガイド装置12の構成部分が回動運動することによって実現される。回動支承部14,23ならびに回動継手24.1,24.2は、僅かな摩擦で形成されているので、全体としてビーム支持体2の僅かな摩擦の直線ガイドが存在し、鉛直方向駆動装置5による追加的なトルクは必要としない。回動支承部14,23および回動継手20,24.1,24.2の使用は、市販の潤滑系が使用できるので極めて有利であり、潤滑系は、周囲に対してシールされているので、残留潤滑剤が周囲に達することはない。
【0032】
運転中、鉛直方向駆動装置5のクランク軸9.1,9.2は、有利には、逆向きの回動方向で同じ回動数で駆動される。連接棒7.1,7.2によって、クランク軸9.1,9.2の運動は、ビーム支持体2に伝達され、ビーム支持体2は、上下運動を行う。ビーム支持体2の鉛直方向運動は、ガイド装置12の枢着ロッド17を介して受容され、揺れ腕13,22に伝達される。回動支承部14,23に取り付けられた揺れ腕13,22は、回動運動を行う。揺れ腕13、揺れ腕22および枢着ロッド17の運動機構は、枢着ロッド17の自由端部が回動継手20で鉛直方向運動するように選択されている。したがってビーム支持体2は、鉛直方向駆動装置5の上下運動行程全体にわたって、真っ直ぐなガイド軌道に沿って保持される。
【0033】
図1に示した形態では、連結運動機構16の構成部材は、ビーム支持体2に揺れ腕13を結合するために、たとえば枢着ロッドおよび第2の揺れ腕として形成されている。原則として、連結運動機構16の構成部材は、別のレバー構成によって実現してもよい。
【0034】
本発明によるニードリング装置の、図2に示した形態は、回動支承部を介して機械フレームに取り付けられた揺れ腕を、連結運動機構を介して、ビーム支持体を直線ガイドするためにビーム支持体と結合する別の1構成を成している。
【0035】
図2に示した形態は、鉛直方向駆動装置5、ビーム支持体2ならびにビーム支持体2によって保持された装置の構造および形状において、前述の形態と同じであり、したがって前述の記載が適用される。図1に示した形態に対して、図2に示した形態では、ガイド装置12は、大体において連接棒7.1,7.2の側方に配置されている。ガイド装置12は、1つの揺れ腕13を備えており、揺れ腕13は、回動支承部14において機械フレーム15に取り付けられている。揺れ腕13は、回動支承部14に回動可能に支承されている。
【0036】
ビーム支持体2に揺れ腕13を結合するために、連結運動機構16は、揺動レバー18および枢着ロッド17によって形成されている。揺動レバー18は、ビーム支持体2の斜め上で、回動支承部19において機械フレーム15に保持されている。揺動レバー18は、回動支承部19に枢着式に取り付けられているので、上位の自由端部と下位の自由端部とは、回動支承部19に対して相対的に旋回可能である。揺動レバー18の上位の自由端部は、回動継手21.2を介して、揺れ腕13の自由端部と枢着式に結合されている。揺動レバー18の下位端部は、回動継手21.1を介して、枢着ロッド17と枢着式に連結されている。枢着ロッド17は、自由端部で、ビーム支持体2の中央まで延びており、そこで回動継手20を介してビーム支持体2と枢着式に結合されている。
【0037】
鉛直方向駆動装置5によって駆動されるビーム支持体2の鉛直方向運動は、枢着ロッド17を介して、ガイド装置12の運動機構によって規定されるガイド軌道上に維持される。枢着ロッド17の長さに応じて、ビーム支持体2は、ほぼ真っ直ぐなガイド軌道に沿ってガイドすることができる。ここでもビームビーム支持体2の並進運動は、専らガイド装置15の構成部分の回動運動によってガイドされる。
【0038】
本発明によるニードリング装置の、図2に示した形態は、ビーム支持体を、選択的に水平方向往復運動と重畳して駆動するのに適している。このために揺れ腕13の回動支承部14は、偏心支承部および偏心軸によって代用され、偏心支承部および偏心軸は、揺れ腕13における水平方向往復運動を導入するための運動装置を介して駆動される。したがって水平方向往復運動を伝達するための直線ガイドが用いられる。ビーム支持体を専ら鉛直方向往復運動で駆動しようとする場合、偏心軸は固定されるので、偏心支承部は、専ら揺れ腕の回動支承部として用いられる。したがって揺れ腕に、水平方向運動は導入されない。
【0039】
図3には、本発明によるニードリング装置の別の形態を概略側面図で示した。図3に示した形態は、図1に示した形態と大体において同一であるので、ここでは、違いについて説明するにとどめ、その他の点については前述の説明が適用される。
【0040】
図3に示した形態では、ビーム支持体2にそれぞれ2つのニードルビーム1.1,1.2が保持されており、ニードルビーム1.1,1.2は、それぞれ下面で、ニードルボード3および多数のニードル4を支持する。ビーム支持体2は、鉛直方向駆動装置5と連結されており、鉛直方向駆動装置5は、前述の形態と同様に形成されている。ビーム支持体2の直線ガイドのために、ガイド装置12が設けられており、ガイド装置12は、第1の揺れ腕13と第2の揺れ腕22とから形成されている。第1の揺れ腕13は、回動支承部14を介して機械フレーム15に取り付けられている。このために回動支承部14は、側方でビーム支持体2の傍に配置されている。第2の揺れ腕22は、回動支承部23において保持されており、回動支承部23は、ビーム支持体2とは反対側で機械フレーム15に配置されている。第1の揺れ腕13ならびに第2の揺れ腕22は、それぞれビーム支持体2のビーム中央に向かって対向するように延びている。ビーム支持体2の中央部分に、枢着ロッド17が設けられており、枢着ロッド17は、中央部分で、回動継手20を介してビーム支持体2と結合されている。枢着ロッド17の自由端部は、回動支承部24.1,24.2を介して、第1の揺れ腕13、第2の揺れ腕22と連結されている。
【0041】
図3に示したガイド装置12では、揺れ腕13,22は、同じ長さを有している。ビーム支持体2に対する枢着ロッド17の枢着点で、揺れ腕13,22の回動運動によって生じるガイド軌道を維持するために、揺れ腕13,22は、ビーム支持体2に対して異なる角度位置で配置されている。したがって回動継手20によって規定された枢着ロッド17の枢着点に、ビーム支持体2の鉛直運動中にほぼ真っ直ぐなガイド軌道を形成することができる。
【0042】
ガイド装置12ならびに回動支承部14,23による機械フレーム15における両側の枢着の対称的な配置構造によって、ビーム支持体2の極めて安定したガイドが達成される。
【0043】
本発明によるニードリング装置の前述の形態は、繊維ウェブをニードリングするのに適しており、ここではニードルは、鉛直方向で上下運動を行う。ビーム支持体の直線ガイドによって、ニードルはできるだけ正確な鉛直方向運動を行う。
【0044】
ニードルが、繊維ウェブをニードリングするために、純粋な鉛直方向運動の他に、重畳する水平方向運動を行う必要がある場合、ガイド装置12は、有利には、選択的にビーム支持体2が上下運動の他に水平方向往復運動を行うように、拡張することができる。図4には、本発明による1形態を概略側面図で示した。本形態は、図1に示した形態と同一であるので、前述の説明が適用され、以下に違いについて説明するにとどめる。
【0045】
図1に示した形態に対して、図4に示した形態では、ガイド装置12の内側において、第2の揺れ腕22の回動支承部は、偏心支承部25によって代用されている。偏心支承部25は、偏心軸26に形成されており、偏心軸26は、回転して、揺れ腕22を駆動する。偏心軸26は、運動装置27と連結されており、運動装置27によって、偏心軸26は、選択的にその位置で固定されるか、または駆動される。
【0046】
固定された偏心軸26では、揺れ腕22は、偏心支承部25によって固定され、専ら偏心支承部25を中心とした回動運動でガイドされる。この状態で、枢着ロッド17は、ビーム支持体2に対して専らビーム支持体の鉛直方向運動をガイドするように働く。枢着ロッド17の自由端部は、回動継手20で、有利には鉛直線に沿ってガイドされるので、ビーム支持体2は、鉛直方向運動の間、真っ直ぐにガイドされる。
【0047】
運動装置27が偏心軸26を駆動する場合、ビーム支持体2は、鉛直方向運動に重畳して一定の水平方向運動で駆動される。枢着ロッド17は、押圧ロッドとして機能し、ビーム支持体2を、回動継手20を介して、重畳した水平方向運動でガイドする。ビーム支持体2ひいてはニードルビーム1は、楕円の運動を行う。偏心軸26の回転数と鉛直方向駆動装置5のクランク軸9.1,9.2の回転数とは、この場合同じであるので、偏心軸26の偏心度に関係する水平方向運動行程が、ニードルビーム1に形成される。
【0048】
図4に示した形態では、ビーム支持体2における重畳した水平方向運動を実現するために、選択的に揺れ腕13の回動支承部14を偏心軸の設けられた偏心支承部によって形成することもできるので、偏心軸を駆動する際に、揺れ腕13を介して、水平方向運動成分が導入される。第2の揺れ腕22は、回動支承部で、機械フレームにガイドされる。両方の揺れ腕を偏心軸に保持することもでき、この場合偏心軸は、運動装置によって、選択的に駆動可能であるか、または固定可能である。
【0049】
したがって繊維ウェブをニードリングするための本発明による装置によって、ニードルビームをガイドしかつ駆動するために高い融通性が提供される。特に均等な繊維構造を有する高品質の繊維製品を製造するために、純粋な鉛直方向のニードリングを実現することができる。
【0050】
図5には、本発明による装置の別の形態を概略側面図で示した。図5に示した形態は、鉛直方向駆動装置5を除いて、図1に示した形態と同一であるので、ここでは鉛直方向駆動装置の相違点について言及するにとどめ、その他の点については前述の説明が適用される。
【0051】
図5に示した形態では、鉛直方向駆動装置に、位相調節装置31が対応して配置されている。位相調節装置31は、2つの調節モータ33.1,33.2を備えており、調節モータ33.1,33.2は、クランク軸9.1,9,2に対応して配置されている。調節モータ33.1,33.2は、制御装置32と接続されている。制御装置32を介して、調節モータ33.1,33.2はそれぞれ独立して作動させることができ、これによってクランク軸9.1,9,2はその位置に関して相対回動することができる。したがってクランク軸9.1,9,2の間の位相位置は、任意に調節することができる。これによってビーム支持体2において、ニードルビーム1の純粋な鉛直方向の上下運動の他に、重畳した水平方向運動を行うことができる。したがってクランク軸9.1,9,2の同位相ならびに両クランク軸の同期駆動において、ほぼ鉛直の上下運動が行われる。クランク軸9.1,9,2の位相位置が変位する場合、連接棒7.1,7.2を介して、ビーム支持体2に斜め姿勢が導入され、斜め姿勢は、後続の運動で、繊維ウェブ30の運動方向に向けられた運動成分を形成する。クランク軸9.1,9,2の間の位相調節の大きさは、直に水平方向運動の運動行程長さに対して比例的である。水平方向運動の運動行程は、クランク軸9.1,9,2の位相差角に関して無段階に調節することができる。
【0052】
位相調節装置31は、選択的に、調節モータと、クランク軸9.1,9.2に作用する調節伝動装置とによって形成することもできる。ここで言及しておくと、クランク軸9.1,9,2は、位相角で相互に変位して駆動されており、これによって、繊維ウェブをニードリングするために、鉛直方向運動の他に水平方向運動を行うことができる。
【0053】
ビーム支持体の運動のガイドは、ここでもガイド装置12によっても行われ、ガイド装置12は、図1に示した形態と同様に、揺れ腕13と、連接棒17と第2の揺れ腕22とから形成された連結運動機構16とによって形成される。
【0054】
本発明による繊維ウェブをニードリングするための装置の、図1〜図4に示した形態は、ビーム支持体を直線ガイドするためのガイド装置の構造および形状において例示したものに過ぎない。原則として、連結運動機構は、揺れ腕をビーム支持体と連結するために3つ以上の構成部材を備えていてもよい。同様に1つのビーム支持体に複数の鉛直方向駆動装置が同時に作用してもよい。この場合各鉛直方向駆動装置または鉛直方向駆動装置群に、複数の直線ガイドが対応して配置されている。
【符号の説明】
【0055】
1.1,1.2 ニードルビーム、 2 ビーム支持体、 3 ニードルボード、 4 ニードル、 5 鉛直方向駆動装置、 6.1,6.2 偏心駆動装置、 7.1,7.2 連接棒、 8.1,8.2 連接棒回動継手、 9.1,9.2 クランク軸、 10.1,10.2 連接棒ヘッド、 11.1,11.2 連接棒環部、 12 ガイド装置、 13 第1の揺れ腕、 14 回動支承部(第1の揺れ腕)、 15 機械フレーム、 16 連結運動機構、 17 枢着ロッド、 18 揺動レバー、 19 回動支承部、 20 回動継手(枢着ロッド/ビーム支持体)、 21.1 回動継手(揺動レバー)、 21.2 回動継手(揺動レバー/揺れ腕)、 22 第2の揺れ腕、 23 回動支承部(第2の揺れ腕)、 24.1 回動継手(枢着ロッド/ビーム支持体)、 24.2 回動継手(枢着ロッド/第2の揺れ腕)、 25 偏心支承部、 26 偏心軸、 27 運動装置、 28 分離部材、 29 載置プレート、 30 繊維ウェブ、 31 位相調節装置、 32 制御装置、 33.1,33.2 調節モータ
【特許請求の範囲】
【請求項1】
繊維ウェブ(30)をニードリングするための装置であって、
少なくとも1つのニードルビーム(1)が設けられており、該ニードルビーム(1)は、下面で、複数のニードル(4)を有するニードルボード(3)を備えており、
ニードルビーム(1)を保持するための、可動に保持されたビーム支持体(2)が設けられており、
ビーム支持体(2)と結合された、上下運動で往復式にビーム支持体(2)を駆動するための鉛直方向駆動装置(5)が設けられており、
ビーム支持体(2)を直線ガイドするためのガイド装置(12)が設けられており、該ガイド装置(12)は、少なくとも1つの揺れ腕(13)を備えており、該揺れ腕(13)は、1端部で、回動支承部(14)によって機械フレーム(15)に保持されている、繊維ウェブをニードリングするための装置において、
揺れ腕(13)の、前記端部とは反対側の端部と、ビーム支持体(2)とが、複数の構成部材(17,22)を備えた連結運動機構(16)を介して、結合されていることを特徴とする、繊維ウェブをニードリングするための装置。
【請求項2】
連結運動機構(16)の構成部材は、枢着ロッド(17)およびフレームレバー(22)によって形成されており、枢着ロッド(17)は、回動継手(20)を介して、ビーム支持体(2)と結合されており、フレームレバー(22)は、回動支承部(19,23)によって、機械フレーム(15)に保持されている、請求項1記載の装置。
【請求項3】
フレームレバーは、揺動レバー(18)として形成されており、該揺動レバー(18)は、中央部分で、回動支承部(19)を備えており、揺動レバー(18)は、1端部で、回動継手(21.1)を介して、枢着ロッド(17)と結合されていて、かつ該端部とは反対側の端部で、第2の回動継手(21.2)を介して、揺れ腕(13)と結合されている、請求項2記載の装置。
【請求項4】
フレームレバーは、第2の揺れ腕(22)として形成されており、第1の揺れ腕(13)および第2の揺れ腕(22)は、回動継手(24.1,24.2)を介してそれぞれ枢着ロッド(17)と結合されている、請求項2記載の装置。
【請求項5】
揺れ腕(13,22)の回動継手(24.1,24.2)は、相互間隔を有して、枢着ロッド(17)に形成されており、回動継手(20)は、ビーム支持体(2)と枢着ロッド(17)との間で、該枢着ロッド(17)の自由端部に、または該枢着ロッド(17)の中央部分に形成されている、請求項4記載の装置。
【請求項6】
揺れ腕(22)の回動支承部(23)は、偏心支承部(25)として、偏心軸(26)の周りに形成されており、該偏心軸(26)は、運動装置(27)によって選択的に駆動されるか、または固定されるようになっている、請求項4または5記載の装置。
【請求項7】
揺れ腕(13,22)の両方の回動支承部(14,23)は、相互間隔を有して、ビーム支持体(2)の上方に配置されている、請求項4から6までのいずれか1項記載の装置。
【請求項8】
揺れ腕の両方の回動支承部(14,23)は、ビーム支持体(7)のビーム中央に対して対称的に配置されている、請求項7記載の装置。
【請求項9】
ビーム支持体(2)は、枢着ロッド(17)を結合するために回動継手(20)をビーム中央に備えている、請求項2から8までのいずれか1項記載の装置。
【請求項10】
揺れ腕(13)の回動支承部(14)は、偏心支承部(25)として、偏心軸(26)の周りに形成されており、該偏心軸(26)は、運動装置(27)によって選択的に駆動されるか、または固定されるようになっている、請求項1から9までのいずれか1項記載の装置。
【請求項11】
鉛直方向駆動装置(5)は、2つの偏心駆動装置(6.1,6.2)によって形成されており、該偏心駆動装置(6.1,6.2)は、クランク軸(9.1,9,2)と、連接棒ヘッド(10.1,10.2)を介してクランク軸と結合された連接棒(7.1,7.2)とを備えており、連接棒(7.1,7.2)は、連接棒環部(11.1,11.2)で、回動継手(8.1,8.2)を介して、ビーム支持体(2)と結合されている、請求項1から10までのいずれか1項記載の装置。
【請求項12】
揺れ腕(13)と、連結運動機構(16)の構成部材とは、鉛直方向駆動装置(5)の連接棒(7.1,7.2)の間か、または鉛直方向駆動装置(5)の連接棒(7.1,7.2)の傍に配置されている、請求項11記載の装置。
【請求項13】
鉛直方向駆動装置(5)は、両方のクランク軸(9.1,9,2)を位相調節するための位相調節装置(31)を備えている、請求項11または12記載の装置。
【請求項1】
繊維ウェブ(30)をニードリングするための装置であって、
少なくとも1つのニードルビーム(1)が設けられており、該ニードルビーム(1)は、下面で、複数のニードル(4)を有するニードルボード(3)を備えており、
ニードルビーム(1)を保持するための、可動に保持されたビーム支持体(2)が設けられており、
ビーム支持体(2)と結合された、上下運動で往復式にビーム支持体(2)を駆動するための鉛直方向駆動装置(5)が設けられており、
ビーム支持体(2)を直線ガイドするためのガイド装置(12)が設けられており、該ガイド装置(12)は、少なくとも1つの揺れ腕(13)を備えており、該揺れ腕(13)は、1端部で、回動支承部(14)によって機械フレーム(15)に保持されている、繊維ウェブをニードリングするための装置において、
揺れ腕(13)の、前記端部とは反対側の端部と、ビーム支持体(2)とが、複数の構成部材(17,22)を備えた連結運動機構(16)を介して、結合されていることを特徴とする、繊維ウェブをニードリングするための装置。
【請求項2】
連結運動機構(16)の構成部材は、枢着ロッド(17)およびフレームレバー(22)によって形成されており、枢着ロッド(17)は、回動継手(20)を介して、ビーム支持体(2)と結合されており、フレームレバー(22)は、回動支承部(19,23)によって、機械フレーム(15)に保持されている、請求項1記載の装置。
【請求項3】
フレームレバーは、揺動レバー(18)として形成されており、該揺動レバー(18)は、中央部分で、回動支承部(19)を備えており、揺動レバー(18)は、1端部で、回動継手(21.1)を介して、枢着ロッド(17)と結合されていて、かつ該端部とは反対側の端部で、第2の回動継手(21.2)を介して、揺れ腕(13)と結合されている、請求項2記載の装置。
【請求項4】
フレームレバーは、第2の揺れ腕(22)として形成されており、第1の揺れ腕(13)および第2の揺れ腕(22)は、回動継手(24.1,24.2)を介してそれぞれ枢着ロッド(17)と結合されている、請求項2記載の装置。
【請求項5】
揺れ腕(13,22)の回動継手(24.1,24.2)は、相互間隔を有して、枢着ロッド(17)に形成されており、回動継手(20)は、ビーム支持体(2)と枢着ロッド(17)との間で、該枢着ロッド(17)の自由端部に、または該枢着ロッド(17)の中央部分に形成されている、請求項4記載の装置。
【請求項6】
揺れ腕(22)の回動支承部(23)は、偏心支承部(25)として、偏心軸(26)の周りに形成されており、該偏心軸(26)は、運動装置(27)によって選択的に駆動されるか、または固定されるようになっている、請求項4または5記載の装置。
【請求項7】
揺れ腕(13,22)の両方の回動支承部(14,23)は、相互間隔を有して、ビーム支持体(2)の上方に配置されている、請求項4から6までのいずれか1項記載の装置。
【請求項8】
揺れ腕の両方の回動支承部(14,23)は、ビーム支持体(7)のビーム中央に対して対称的に配置されている、請求項7記載の装置。
【請求項9】
ビーム支持体(2)は、枢着ロッド(17)を結合するために回動継手(20)をビーム中央に備えている、請求項2から8までのいずれか1項記載の装置。
【請求項10】
揺れ腕(13)の回動支承部(14)は、偏心支承部(25)として、偏心軸(26)の周りに形成されており、該偏心軸(26)は、運動装置(27)によって選択的に駆動されるか、または固定されるようになっている、請求項1から9までのいずれか1項記載の装置。
【請求項11】
鉛直方向駆動装置(5)は、2つの偏心駆動装置(6.1,6.2)によって形成されており、該偏心駆動装置(6.1,6.2)は、クランク軸(9.1,9,2)と、連接棒ヘッド(10.1,10.2)を介してクランク軸と結合された連接棒(7.1,7.2)とを備えており、連接棒(7.1,7.2)は、連接棒環部(11.1,11.2)で、回動継手(8.1,8.2)を介して、ビーム支持体(2)と結合されている、請求項1から10までのいずれか1項記載の装置。
【請求項12】
揺れ腕(13)と、連結運動機構(16)の構成部材とは、鉛直方向駆動装置(5)の連接棒(7.1,7.2)の間か、または鉛直方向駆動装置(5)の連接棒(7.1,7.2)の傍に配置されている、請求項11記載の装置。
【請求項13】
鉛直方向駆動装置(5)は、両方のクランク軸(9.1,9,2)を位相調節するための位相調節装置(31)を備えている、請求項11または12記載の装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2010−535948(P2010−535948A)
【公表日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2010−519406(P2010−519406)
【出願日】平成20年7月16日(2008.7.16)
【国際出願番号】PCT/EP2008/059291
【国際公開番号】WO2009/019111
【国際公開日】平成21年2月12日(2009.2.12)
【出願人】(307031976)エーリコン テクスティル ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト (105)
【氏名又は名称原語表記】Oerlikon Textile GmbH & CO. KG
【住所又は居所原語表記】Leverkuser Strasse 65, D−42897 Remscheid, Germany
【Fターム(参考)】
【公表日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成20年7月16日(2008.7.16)
【国際出願番号】PCT/EP2008/059291
【国際公開番号】WO2009/019111
【国際公開日】平成21年2月12日(2009.2.12)
【出願人】(307031976)エーリコン テクスティル ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト (105)
【氏名又は名称原語表記】Oerlikon Textile GmbH & CO. KG
【住所又は居所原語表記】Leverkuser Strasse 65, D−42897 Remscheid, Germany
【Fターム(参考)】
[ Back to top ]