
繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置
【課題】繊維スライバの破断または停止を短時間で確実に監視することのできる単純な監視装置を提供する。
【解決手段】繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置であって、移動する繊維スライバに接触して位置決めされる監視要素を使用しており、少なくとも一つの繊維スライバを延伸システムまで供給する供給装置の近傍または供給装置内に配置されるという監視装置であって、前記繊維スライバ(7、7a〜7f)のための監視要素(12)は、テンションが掛けられた前記繊維スライバ(7、7a〜7f)により偏向されるよう配置された偏向要素(12b、12b1〜12b6)を含んでおり、前記繊維スライバ(7、7a〜7f)のテンションが喪失したときには、前記偏向要素はスイッチ動作を開始する、監視装置が提供される。
【解決手段】繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置であって、移動する繊維スライバに接触して位置決めされる監視要素を使用しており、少なくとも一つの繊維スライバを延伸システムまで供給する供給装置の近傍または供給装置内に配置されるという監視装置であって、前記繊維スライバ(7、7a〜7f)のための監視要素(12)は、テンションが掛けられた前記繊維スライバ(7、7a〜7f)により偏向されるよう配置された偏向要素(12b、12b1〜12b6)を含んでおり、前記繊維スライバ(7、7a〜7f)のテンションが喪失したときには、前記偏向要素はスイッチ動作を開始する、監視装置が提供される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置であって、移動する繊維スライバに接触して位置決めされる監視要素を使用しており、少なくとも一つの繊維スライバを延伸システムまで供給する供給装置の近傍または供給装置内に配置されるという監視装置に関する。
【背景技術】
【0002】
練篠機においては、繊維スライバはケンスから取出されて、延伸システムの供給テーブル上のローラ対まで供給装置を通って供給される。供給装置は延伸システムの供給テーブルの上流区分に配置される。処理されるべき繊維スライバを包含するケンスは供給装置の両側部または一方の側部に配置される。各ケンスの繊維スライバはケンスから垂直方向上方に引出されて、供給装置により練篠機に向かって90°転向される。全てのケンスの繊維スライバは供給装置によって互いに平行に案内される。繊維スライバを練篠機まで搬送するときに、個々の繊維スライバが破断する場合がある。このことは、スライバがコイル状に巻かれることについての欠陥にほとんど帰因するものである。そのような目的のために、繊維破断を検出して発信する監視装置が繊維スライバの搬送経路に配置される。
【0003】
繊維破断の信号によって練篠機を停止させ、それにより、破断した繊維が練篠機に進入する前に、操作者は、破断した繊維の端部をつなぐことができる。監視装置を供給装置の内部または供給装置と練篠機との間に配置することも可能である。さらに、繊維スライバが停止することもある。スライバが破断または停止しているときに、繊維スライバはテンションを喪失する。繊維スライバの供給速度が高いときには、監視装置により全ての繊維破断が確実に検出されるわけではないという問題が生じる。繊維スライバの供給速度が高いときには、繊維スライバが比較的軽量であるので、監視装置、例えば光バリアを通過する前に、繊維スライバの端部が監視経路の高さの深みにまで下落しないことがあり、それにより、落ちたスライバの端部により信号が発信できないことが生じうる。そのような場合には、スライバの端部は、練篠機の入口における計量ローラまたは接触ローラを通過して、その箇所においてのみスライバの破断として検出される。このような場合には、スライバの端部をそれ以上つなぐのが不可能であり、むしろ新しいスライバの開始端部をねじ込む(thread in)必要がある。練篠機に進入させる前に、スライバの端部をつなぐことは、時間をかなり長く消費することになる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
それゆえ、本発明は前述した形式の監視装置を形成する際の問題を解決し、前述した欠点を回避すると共に、繊維スライバが破断または停止したときに短時間でそれらを確実に監視することのできる単純な監視装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
前述した課題は請求項1の特徴によって解決される。
すなわち、1番目の発明によれば、繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置であって、移動する繊維スライバに接触して位置決めされる監視要素を使用しており、少なくとも一つの繊維スライバを延伸システムまで供給する供給装置の近傍または供給装置内に配置されるという監視装置であって、前記繊維スライバ(7、7a〜7f)のための監視要素(12)は、テンションが掛けられた前記繊維スライバ(7、7a〜7f)により偏向されるよう配置された偏向要素(12b、12b1〜12b6)を含んでおり、前記繊維スライバ(7、7a〜7f)のテンションが喪失したときには、前記偏向要素はスイッチ動作を開始する、監視装置が提供される。
【0006】
監視要素は、繊維スライバに接触することにより繊維スライバのテンションの喪失を直接的に検出し、迅速で確実な監視を単純な方法で達成する。さらに、このことは、少なくとも一つの繊維スライバの破断または停止の際に迅速且つ安全に遮断することによって、繊維機械の効率を高めことになる。
【0007】
請求項2から請求項28は本発明の有利な改良を包含する。
すなわち2番目の発明によれば、1番目の発明において、前記監視要素が弾性的にテンション掛け可能である。
3番目の発明によれば、1番目または2番目の発明において、前記監視要素が少なくとも部分的に金属を含んでいる。
4番目の発明によれば、1番目から3番目のいずれかの発明において、前記テンション掛けされた繊維スライバによって前記監視要素が非移動式カウンタ要素に対して持ち上げられるよう配置されている。
5番目の発明によれば、1番目から4番目のいずれかの発明において、前記監視要素および前記カウンタ要素はスイッチ装置を形成する。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記スイッチ装置は、前記監視要素が移動するときに電気パルスを発生することができる。
7番目の発明によれば、1番目から6番目のいずれかの発明において、前記監視要素は板バネの形態をなしている。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記監視要素は凸状に湾曲している。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記スライバに対する前記監視要素の接触領域は平滑である。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記テンション掛けされた繊維スライバは前記監視要素を弾性的に付勢する。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記監視要素は固有の弾力性により付勢されるよう配置されている。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記監視要素および前記カウンタ要素は接触式スイッチとして協働する。
13番目の発明によれば、1番目から12番目のいずれかの発明において、前記監視装置前および前記カウンタ要素は非接触式スイッチとして協働する。
14番目の発明によれば、1番目から13番目のいずれかの発明において、前記非接触式スイッチは測定装置である。
15番目の発明によれば、1番目から14番目のいずれかの発明において、前記測定装置は近接イニシエータを含む。
16番目の発明によれば、1番目から15番目のいずれかの発明において、前記測定装置は誘導性近接スイッチを含む。
17番目の発明によれば、1番目から16番目のいずれかの発明において、前記移動は、前記繊維スライバのテンションの喪失により起動されるよう配置されている。
18番目の発明によれば、1番目から17番目のいずれかの発明において、前記テンションの喪失は少なくとも一つの繊維スライバの停止により生じる。
19番目の発明によれば、1番目から18番目のいずれかの発明において、前記テンションの喪失は少なくとも一つの繊維スライバの引裂または破断を通じて生じる。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記スイッチ装置は前記機械の遮断装置に接続されている。
21番目の発明によれば、1番目から20番目のいずれかの発明において、前記監視要素、例えば板バネ、および前記カウンタ要素は電圧源に接続されている。
22番目の発明によれば、1番目から21番目のいずれかの発明において、前記カウンタ要素は少なくとも部分的に金属を含んでいる。
23番目の発明によれば、1番目から22番目のいずれかの発明において、複数の監視要素、例えば板バネが保持要素、例えばチューブなどに取付けられている。
24番目の発明によれば、1番目から23番目のいずれかの発明において、監視要素が繊維スライバのそれぞれに対して存在する。
25番目の発明によれば、1番目から24番目のいずれかの発明において、前記監視要素は前記供給装置および前記延伸システムとの間に配置されている。
26番目の発明によれば、1番目から25番目のいずれかの発明において、前記監視要素、例えば板バネ、および前記カウンタ要素は互いに電気的に絶縁されている。
27番目の発明によれば、1番目から26番目のいずれかの発明において、テンションの喪失のときに、前記繊維スライバは重力により下方に偏向される。
28番目の発明によれば、1番目から27番目のいずれかの発明において、前記偏向要素はバネ負荷されている。
【図面の簡単な説明】
【0008】
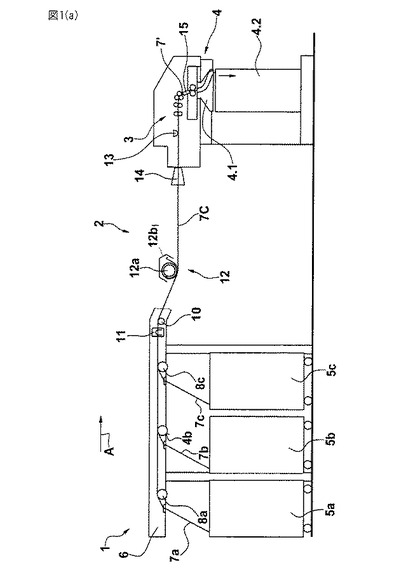
【図1(a)】本発明に基づく装置を備えた練篠機の牽伸システムおよび供給テーブルの概略的な側面図である。
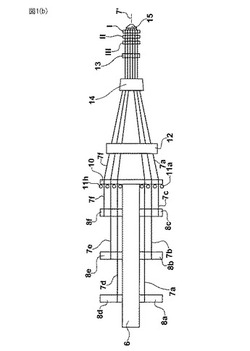
【図1(b)】図1(a)に示される装置の頂面図である。
【図2】(a)テンションが掛けられた繊維スライバおよびテンションが掛けられた板バネを備えた、本発明に基づく装置の側面図であり、板バネの一方の端部領域はカウンタ要素に接触していない。(b)図2(a)に対応する本発明に基づく装置を示す図であり、繊維スライバにはテンションが掛かっておらず(垂下しており)、板バネにもテンションが掛かっておらず、板バネの端部領域はカウンタ要素に接触している。
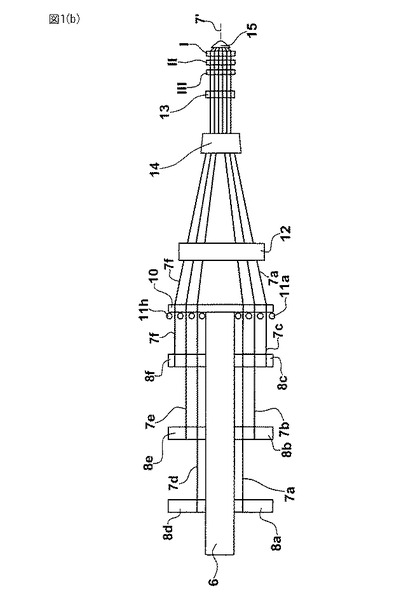
【図3】板バネの他方の端部領域がカウンタ要素に接触しており、板バネとカウンタ要素とが電圧供給源に接続されている実施形態を示す図である。
【図4】バネ負荷された偏向要素を示す図である。
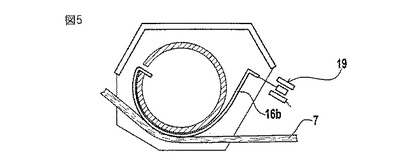
【図5】誘導式変位センサが板バネに関連付けられている、非接触式スイッチを備えた本発明に基づく実施形態を示す図である。
【発明を実施するための形態】
【0009】
図面に示される典型的な実施形態によって本発明を以下に詳細に説明する。
図1(a)により側面図は、練篠機、例えばTrutzschler社製練篠機TD02の供給領域1、サプライ(supply)領域2、牽伸システム3およびスライバ堆積領域4を示している。供給領域1においては、練篠機の三つの紡績ケンス5a〜5c(丸形ケンス)がスライバ供給テーブル6(クリール)の下方に二列をなして配置されており、供給スライバ7a〜7cがスライバ変路要素8a〜8c、例えば変路ローラ、変路バーなどの上に引き出されて、牽伸システム3に供給される。繊維スライバ7a〜7cは紡績ケンス5a〜5cから持ち上げられて、スライバ供給テーブル6を通って牽伸システム3まで案内される。牽伸システム3を通過した後、延伸された繊維スライバ7’はカンコイラ4の回転プレートに進入して、配達ケンス内にコイルをなして堆積される。供給テーブル6は、スライバ供給装置全体の領域を越えて練篠機ほどの遠方まで延びている。繊維スライバ供給装置によって、繊維スライバ7は紡績ケンス5のそれぞれから練篠機まで供給される。各スライバ変路要素8a、8cの領域においては、繊維スライバ7を案内する案内要素が存在している。文字Aは繊維スライバ7a、7b、7cの走行方向を示している。供給テーブル6の供給端部においては、繊維スライバ7a〜7fのための案内装置が存在しており、この案内装置は円形断面からなる水平方向バー10を含んでいる。水平方向バー10の後方側には、八つの円筒体11a〜11hが取付けられている。これら円筒体11a〜11hの軸線は鉛直方向に整列されており、これら円筒体11a〜11hの胴部の間の距離は、繊維スライバの移動が損なわれることなしに、繊維スライバ7a〜7fが通過するのに十分に大きい。このように、頂部にて開放した案内チャネルが繊維スライバ7a〜7fのために形成される。つまり、円筒体11a〜11hは案内要素としての役目を果たす。本発明に基づく監視装置12は供給テーブル6の下流でかつ牽伸システム3の上流に配置されている。
【0010】
図1(b)に示されるように、供給テーブル6の各側部には、三つの紡績ケンス5(図示しない)からなる列が互いに平行に配置されている。動作時、各繊維スライバ7を六つ全ての紡績ケンス5から同時に引出すことができる。あるいは、繊維スライバ7を一方の側部のみから、例えば三つの紡績ケンス5a〜5cのみから引出しつつ、他方の側部における紡績ケンス5d〜5fを交換するようにしてもよい。さらに、供給テーブル6の各側部においては、三つのスライバ変路要素8a、8b、8cおよび8d、8e、8fが作動方向Aにおいてそれぞれ順次に配置されている。各対のスライバ変路要素8aおよび8d、8bおよび8e、8cおよび8fは互いに同軸に配置されている。供給領域1における繊維スライバ7の長さは内側から外側に向かって減少している。図1(a)および図1(b)に示されるように、繊維スライバ7a〜7fは、供給領域1の供給テーブル6から案内配列体(バー10、円筒体11a〜11e)の上方でかつ監視装置12の下方において、スライバファンネル14、牽伸システム3、ウェブ案内部15、除去(take−off)ローラを備えたスライバファンネル、および回転プレート4.1を通過して、ケンス4.2まで走行する。
【0011】
図1(b)においては、牽伸システム3の下方ローラIII、II、Iが示されている。図1(b)によれば、スライバ変路要素8および監視装置12の間の領域においては、六つの繊維スライバ7からなる合成された繊維スライバが、供給クリールの張力を受ける。監視装置12と牽伸システム3の供給ローラIIIとの間の領域においては、六つの繊維スライバ7からなる合成された繊維スライバが搬送のテンションを受ける。
【0012】
監視装置12は繊維スライバ7a〜7fのそれぞれに関連づけられている。監視装置12は共通のカウンタ要素12a(counter−element)と、板バネ12b1〜12b6の形態をなす六つの偏向要素を含んでいる。動作時、図1(a)、図1(b)の内容に基づいてテンション掛けされた繊維スライバ7a〜7fは板バネ12b1〜12b6に押し当たって下方から押圧して、これらを上方に偏向させ、それにより、板バネ12b1〜12b6にテンションが掛かって、これら板バネ12b1〜12b6が繊維スライバ7a〜7fに圧力を及ぼすようになる。繊維スライバ7a〜7fにテンションが掛かっていないときには、板バネ12b1〜12b6への圧力は減少するかまたは完全になくなり(繊維スライバ7a〜7fが下落する)、その結果、板バネ12b1〜12b6は緩和して、緩和されたそれらの初期位置まで概ねまたは完全に戻る(図2(a)と図3とを比較されたい)。
【0013】
図2(a)および図2(b)に示されるように、繊維スライバ7のための監視装置12は、共通のカウンタ要素12aと、板バネ12bの形態をなす個々の偏向要素とを含んでいる。カウンタ要素は、複数の側面からなるチューブの形態または一側において開放する円筒体胴部の一部分の形態をなしており、例えばシート状金属からなる。板バネ12bは凸状に湾曲しており、延長小片121、122を端部領域のそれぞれに備えている。これら延長小片121、122は板バネ本体からほぼ直角に突出している。延長小片122はチューブ16の連続スロット内に突出して、チューブ16内に固定されている。チューブ16は全ての板バネ12b1〜12b6をつないで保持している。延長小片121の開放端部とカウンタ要素12aの電気的に接続された内面との間には、図2(a)に示されるような隙間aが存在している。動作時、テンション掛けされた繊維スライバ7は、板バネ12bをチューブ16の外方横方向面に押当ててこの外方横方向面の方向に押圧し、従って、延長小片がカウンタ要素12aに向かって持ち上がるようになる。スライバの破断のときには、繊維スライバ7のテンションは減少し、図2(b)に示されるようにスライバは下落する。それゆえ、板バネ12bは緩和された初期位置に戻る、つまり、チューブ16から離間するようになる。延長小片121の自由端はカウンタ要素12aの電気的に接続された内面を押圧し、タッチすることにより接触式スイッチとして機能して電気回路をクローズする(図3を参照されたい)。
【0014】
図3を参照すると、電圧源17、スイッチ装置18例えば機械の遮断スイッチ、および接触式スイッチを含む電気回路が設けられている。接触式スイッチは、一方では金属製チューブ16、他方ではカウンタ要素12aに作用する板バネ12bからなる。図示される実施例においては、接触式スイッチは、板バネ12bの延長小片122の近傍に位置する領域123がカウンタ要素12aに接触することによって閉鎖される。繊維スライバ7にはテンションが掛かっていない場合には、板バネ12bはそのテンションを喪失するようになる。電圧源17の一方の極がチューブ16、従って、全ての板バネ12b1〜12b6に印加されている。電圧源17の他方の極はカウンタ要素12aに印加されている。チューブ16およびカウンタ要素12aは電気的に互いに絶縁されている。
【0015】
図4を参照すると、偏向要素12bは金属シートなどからなり、偏向要素12bの一方の端部領域124は、例えば固定されたカウンタ取付部21において支持された圧縮バネ20によってバネ負荷されている。
【0016】
図5によれば、非接触式スイッチが板バネ12bに関連づけられている。この目的のために、プランジャコイル191およびプランジャモータ192を含む誘導式変位センサ19が延長小片121に関連付けられていて、制御装置(図示しない)、例えば機械制御部に電気的に接続されている。図示される実施例においては、板バネ12bは動作時にテンションが掛けられる。スライバ破断のとき、および対応する板バネ12bの緩和のときには、プランジャコイル192は電気パルスを発信する。
【0017】
誘導式近接スイッチ、光検出器などを非接触式スイッチとして使用することも可能である。
【0018】
本発明に基づく装置をレベリング無しの練篠機、例えばTrutzschler社製練篠機TD02において使用でき、またオートレベラ付きの練篠機、例えばTrutzschler社製練篠機TD03において使用することもできる。
【0019】
動作時、弾性的に付勢された板バネにおけるテンション掛けされた繊維スライバの接触圧力は、繊維スライバのカウンタ圧力よりも大きく、それにより、板バネは降伏(yield)するようになる。
【符号の説明】
【0020】
1 供給領域
2 サプライ領域
3 牽伸システム
4 カンコイラ
4.1 回転プレート
4.2 ケンス
5、5a〜5f 紡績ケンス
6 供給テーブル
7、7a〜7f 繊維スライバ
8a〜8c、 スライバ変路要素
10 水平方向バー
11a〜11h 円筒体
12 監視装置
12a カウンタ要素
12b1〜12b6 板バネ
121、122 延長小片
123 領域
124 端部領域
14 スライバファンネル
16 チューブ
17 電圧源
19 誘導式変位センサ
20 圧縮バネ
21 カウンタ取付部
191 プランジャコイル
192 プランジャモータ
【技術分野】
【0001】
本発明は、繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置であって、移動する繊維スライバに接触して位置決めされる監視要素を使用しており、少なくとも一つの繊維スライバを延伸システムまで供給する供給装置の近傍または供給装置内に配置されるという監視装置に関する。
【背景技術】
【0002】
練篠機においては、繊維スライバはケンスから取出されて、延伸システムの供給テーブル上のローラ対まで供給装置を通って供給される。供給装置は延伸システムの供給テーブルの上流区分に配置される。処理されるべき繊維スライバを包含するケンスは供給装置の両側部または一方の側部に配置される。各ケンスの繊維スライバはケンスから垂直方向上方に引出されて、供給装置により練篠機に向かって90°転向される。全てのケンスの繊維スライバは供給装置によって互いに平行に案内される。繊維スライバを練篠機まで搬送するときに、個々の繊維スライバが破断する場合がある。このことは、スライバがコイル状に巻かれることについての欠陥にほとんど帰因するものである。そのような目的のために、繊維破断を検出して発信する監視装置が繊維スライバの搬送経路に配置される。
【0003】
繊維破断の信号によって練篠機を停止させ、それにより、破断した繊維が練篠機に進入する前に、操作者は、破断した繊維の端部をつなぐことができる。監視装置を供給装置の内部または供給装置と練篠機との間に配置することも可能である。さらに、繊維スライバが停止することもある。スライバが破断または停止しているときに、繊維スライバはテンションを喪失する。繊維スライバの供給速度が高いときには、監視装置により全ての繊維破断が確実に検出されるわけではないという問題が生じる。繊維スライバの供給速度が高いときには、繊維スライバが比較的軽量であるので、監視装置、例えば光バリアを通過する前に、繊維スライバの端部が監視経路の高さの深みにまで下落しないことがあり、それにより、落ちたスライバの端部により信号が発信できないことが生じうる。そのような場合には、スライバの端部は、練篠機の入口における計量ローラまたは接触ローラを通過して、その箇所においてのみスライバの破断として検出される。このような場合には、スライバの端部をそれ以上つなぐのが不可能であり、むしろ新しいスライバの開始端部をねじ込む(thread in)必要がある。練篠機に進入させる前に、スライバの端部をつなぐことは、時間をかなり長く消費することになる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
それゆえ、本発明は前述した形式の監視装置を形成する際の問題を解決し、前述した欠点を回避すると共に、繊維スライバが破断または停止したときに短時間でそれらを確実に監視することのできる単純な監視装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
前述した課題は請求項1の特徴によって解決される。
すなわち、1番目の発明によれば、繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置であって、移動する繊維スライバに接触して位置決めされる監視要素を使用しており、少なくとも一つの繊維スライバを延伸システムまで供給する供給装置の近傍または供給装置内に配置されるという監視装置であって、前記繊維スライバ(7、7a〜7f)のための監視要素(12)は、テンションが掛けられた前記繊維スライバ(7、7a〜7f)により偏向されるよう配置された偏向要素(12b、12b1〜12b6)を含んでおり、前記繊維スライバ(7、7a〜7f)のテンションが喪失したときには、前記偏向要素はスイッチ動作を開始する、監視装置が提供される。
【0006】
監視要素は、繊維スライバに接触することにより繊維スライバのテンションの喪失を直接的に検出し、迅速で確実な監視を単純な方法で達成する。さらに、このことは、少なくとも一つの繊維スライバの破断または停止の際に迅速且つ安全に遮断することによって、繊維機械の効率を高めことになる。
【0007】
請求項2から請求項28は本発明の有利な改良を包含する。
すなわち2番目の発明によれば、1番目の発明において、前記監視要素が弾性的にテンション掛け可能である。
3番目の発明によれば、1番目または2番目の発明において、前記監視要素が少なくとも部分的に金属を含んでいる。
4番目の発明によれば、1番目から3番目のいずれかの発明において、前記テンション掛けされた繊維スライバによって前記監視要素が非移動式カウンタ要素に対して持ち上げられるよう配置されている。
5番目の発明によれば、1番目から4番目のいずれかの発明において、前記監視要素および前記カウンタ要素はスイッチ装置を形成する。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記スイッチ装置は、前記監視要素が移動するときに電気パルスを発生することができる。
7番目の発明によれば、1番目から6番目のいずれかの発明において、前記監視要素は板バネの形態をなしている。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記監視要素は凸状に湾曲している。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記スライバに対する前記監視要素の接触領域は平滑である。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記テンション掛けされた繊維スライバは前記監視要素を弾性的に付勢する。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記監視要素は固有の弾力性により付勢されるよう配置されている。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記監視要素および前記カウンタ要素は接触式スイッチとして協働する。
13番目の発明によれば、1番目から12番目のいずれかの発明において、前記監視装置前および前記カウンタ要素は非接触式スイッチとして協働する。
14番目の発明によれば、1番目から13番目のいずれかの発明において、前記非接触式スイッチは測定装置である。
15番目の発明によれば、1番目から14番目のいずれかの発明において、前記測定装置は近接イニシエータを含む。
16番目の発明によれば、1番目から15番目のいずれかの発明において、前記測定装置は誘導性近接スイッチを含む。
17番目の発明によれば、1番目から16番目のいずれかの発明において、前記移動は、前記繊維スライバのテンションの喪失により起動されるよう配置されている。
18番目の発明によれば、1番目から17番目のいずれかの発明において、前記テンションの喪失は少なくとも一つの繊維スライバの停止により生じる。
19番目の発明によれば、1番目から18番目のいずれかの発明において、前記テンションの喪失は少なくとも一つの繊維スライバの引裂または破断を通じて生じる。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記スイッチ装置は前記機械の遮断装置に接続されている。
21番目の発明によれば、1番目から20番目のいずれかの発明において、前記監視要素、例えば板バネ、および前記カウンタ要素は電圧源に接続されている。
22番目の発明によれば、1番目から21番目のいずれかの発明において、前記カウンタ要素は少なくとも部分的に金属を含んでいる。
23番目の発明によれば、1番目から22番目のいずれかの発明において、複数の監視要素、例えば板バネが保持要素、例えばチューブなどに取付けられている。
24番目の発明によれば、1番目から23番目のいずれかの発明において、監視要素が繊維スライバのそれぞれに対して存在する。
25番目の発明によれば、1番目から24番目のいずれかの発明において、前記監視要素は前記供給装置および前記延伸システムとの間に配置されている。
26番目の発明によれば、1番目から25番目のいずれかの発明において、前記監視要素、例えば板バネ、および前記カウンタ要素は互いに電気的に絶縁されている。
27番目の発明によれば、1番目から26番目のいずれかの発明において、テンションの喪失のときに、前記繊維スライバは重力により下方に偏向される。
28番目の発明によれば、1番目から27番目のいずれかの発明において、前記偏向要素はバネ負荷されている。
【図面の簡単な説明】
【0008】
【図1(a)】本発明に基づく装置を備えた練篠機の牽伸システムおよび供給テーブルの概略的な側面図である。
【図1(b)】図1(a)に示される装置の頂面図である。
【図2】(a)テンションが掛けられた繊維スライバおよびテンションが掛けられた板バネを備えた、本発明に基づく装置の側面図であり、板バネの一方の端部領域はカウンタ要素に接触していない。(b)図2(a)に対応する本発明に基づく装置を示す図であり、繊維スライバにはテンションが掛かっておらず(垂下しており)、板バネにもテンションが掛かっておらず、板バネの端部領域はカウンタ要素に接触している。
【図3】板バネの他方の端部領域がカウンタ要素に接触しており、板バネとカウンタ要素とが電圧供給源に接続されている実施形態を示す図である。
【図4】バネ負荷された偏向要素を示す図である。
【図5】誘導式変位センサが板バネに関連付けられている、非接触式スイッチを備えた本発明に基づく実施形態を示す図である。
【発明を実施するための形態】
【0009】
図面に示される典型的な実施形態によって本発明を以下に詳細に説明する。
図1(a)により側面図は、練篠機、例えばTrutzschler社製練篠機TD02の供給領域1、サプライ(supply)領域2、牽伸システム3およびスライバ堆積領域4を示している。供給領域1においては、練篠機の三つの紡績ケンス5a〜5c(丸形ケンス)がスライバ供給テーブル6(クリール)の下方に二列をなして配置されており、供給スライバ7a〜7cがスライバ変路要素8a〜8c、例えば変路ローラ、変路バーなどの上に引き出されて、牽伸システム3に供給される。繊維スライバ7a〜7cは紡績ケンス5a〜5cから持ち上げられて、スライバ供給テーブル6を通って牽伸システム3まで案内される。牽伸システム3を通過した後、延伸された繊維スライバ7’はカンコイラ4の回転プレートに進入して、配達ケンス内にコイルをなして堆積される。供給テーブル6は、スライバ供給装置全体の領域を越えて練篠機ほどの遠方まで延びている。繊維スライバ供給装置によって、繊維スライバ7は紡績ケンス5のそれぞれから練篠機まで供給される。各スライバ変路要素8a、8cの領域においては、繊維スライバ7を案内する案内要素が存在している。文字Aは繊維スライバ7a、7b、7cの走行方向を示している。供給テーブル6の供給端部においては、繊維スライバ7a〜7fのための案内装置が存在しており、この案内装置は円形断面からなる水平方向バー10を含んでいる。水平方向バー10の後方側には、八つの円筒体11a〜11hが取付けられている。これら円筒体11a〜11hの軸線は鉛直方向に整列されており、これら円筒体11a〜11hの胴部の間の距離は、繊維スライバの移動が損なわれることなしに、繊維スライバ7a〜7fが通過するのに十分に大きい。このように、頂部にて開放した案内チャネルが繊維スライバ7a〜7fのために形成される。つまり、円筒体11a〜11hは案内要素としての役目を果たす。本発明に基づく監視装置12は供給テーブル6の下流でかつ牽伸システム3の上流に配置されている。
【0010】
図1(b)に示されるように、供給テーブル6の各側部には、三つの紡績ケンス5(図示しない)からなる列が互いに平行に配置されている。動作時、各繊維スライバ7を六つ全ての紡績ケンス5から同時に引出すことができる。あるいは、繊維スライバ7を一方の側部のみから、例えば三つの紡績ケンス5a〜5cのみから引出しつつ、他方の側部における紡績ケンス5d〜5fを交換するようにしてもよい。さらに、供給テーブル6の各側部においては、三つのスライバ変路要素8a、8b、8cおよび8d、8e、8fが作動方向Aにおいてそれぞれ順次に配置されている。各対のスライバ変路要素8aおよび8d、8bおよび8e、8cおよび8fは互いに同軸に配置されている。供給領域1における繊維スライバ7の長さは内側から外側に向かって減少している。図1(a)および図1(b)に示されるように、繊維スライバ7a〜7fは、供給領域1の供給テーブル6から案内配列体(バー10、円筒体11a〜11e)の上方でかつ監視装置12の下方において、スライバファンネル14、牽伸システム3、ウェブ案内部15、除去(take−off)ローラを備えたスライバファンネル、および回転プレート4.1を通過して、ケンス4.2まで走行する。
【0011】
図1(b)においては、牽伸システム3の下方ローラIII、II、Iが示されている。図1(b)によれば、スライバ変路要素8および監視装置12の間の領域においては、六つの繊維スライバ7からなる合成された繊維スライバが、供給クリールの張力を受ける。監視装置12と牽伸システム3の供給ローラIIIとの間の領域においては、六つの繊維スライバ7からなる合成された繊維スライバが搬送のテンションを受ける。
【0012】
監視装置12は繊維スライバ7a〜7fのそれぞれに関連づけられている。監視装置12は共通のカウンタ要素12a(counter−element)と、板バネ12b1〜12b6の形態をなす六つの偏向要素を含んでいる。動作時、図1(a)、図1(b)の内容に基づいてテンション掛けされた繊維スライバ7a〜7fは板バネ12b1〜12b6に押し当たって下方から押圧して、これらを上方に偏向させ、それにより、板バネ12b1〜12b6にテンションが掛かって、これら板バネ12b1〜12b6が繊維スライバ7a〜7fに圧力を及ぼすようになる。繊維スライバ7a〜7fにテンションが掛かっていないときには、板バネ12b1〜12b6への圧力は減少するかまたは完全になくなり(繊維スライバ7a〜7fが下落する)、その結果、板バネ12b1〜12b6は緩和して、緩和されたそれらの初期位置まで概ねまたは完全に戻る(図2(a)と図3とを比較されたい)。
【0013】
図2(a)および図2(b)に示されるように、繊維スライバ7のための監視装置12は、共通のカウンタ要素12aと、板バネ12bの形態をなす個々の偏向要素とを含んでいる。カウンタ要素は、複数の側面からなるチューブの形態または一側において開放する円筒体胴部の一部分の形態をなしており、例えばシート状金属からなる。板バネ12bは凸状に湾曲しており、延長小片121、122を端部領域のそれぞれに備えている。これら延長小片121、122は板バネ本体からほぼ直角に突出している。延長小片122はチューブ16の連続スロット内に突出して、チューブ16内に固定されている。チューブ16は全ての板バネ12b1〜12b6をつないで保持している。延長小片121の開放端部とカウンタ要素12aの電気的に接続された内面との間には、図2(a)に示されるような隙間aが存在している。動作時、テンション掛けされた繊維スライバ7は、板バネ12bをチューブ16の外方横方向面に押当ててこの外方横方向面の方向に押圧し、従って、延長小片がカウンタ要素12aに向かって持ち上がるようになる。スライバの破断のときには、繊維スライバ7のテンションは減少し、図2(b)に示されるようにスライバは下落する。それゆえ、板バネ12bは緩和された初期位置に戻る、つまり、チューブ16から離間するようになる。延長小片121の自由端はカウンタ要素12aの電気的に接続された内面を押圧し、タッチすることにより接触式スイッチとして機能して電気回路をクローズする(図3を参照されたい)。
【0014】
図3を参照すると、電圧源17、スイッチ装置18例えば機械の遮断スイッチ、および接触式スイッチを含む電気回路が設けられている。接触式スイッチは、一方では金属製チューブ16、他方ではカウンタ要素12aに作用する板バネ12bからなる。図示される実施例においては、接触式スイッチは、板バネ12bの延長小片122の近傍に位置する領域123がカウンタ要素12aに接触することによって閉鎖される。繊維スライバ7にはテンションが掛かっていない場合には、板バネ12bはそのテンションを喪失するようになる。電圧源17の一方の極がチューブ16、従って、全ての板バネ12b1〜12b6に印加されている。電圧源17の他方の極はカウンタ要素12aに印加されている。チューブ16およびカウンタ要素12aは電気的に互いに絶縁されている。
【0015】
図4を参照すると、偏向要素12bは金属シートなどからなり、偏向要素12bの一方の端部領域124は、例えば固定されたカウンタ取付部21において支持された圧縮バネ20によってバネ負荷されている。
【0016】
図5によれば、非接触式スイッチが板バネ12bに関連づけられている。この目的のために、プランジャコイル191およびプランジャモータ192を含む誘導式変位センサ19が延長小片121に関連付けられていて、制御装置(図示しない)、例えば機械制御部に電気的に接続されている。図示される実施例においては、板バネ12bは動作時にテンションが掛けられる。スライバ破断のとき、および対応する板バネ12bの緩和のときには、プランジャコイル192は電気パルスを発信する。
【0017】
誘導式近接スイッチ、光検出器などを非接触式スイッチとして使用することも可能である。
【0018】
本発明に基づく装置をレベリング無しの練篠機、例えばTrutzschler社製練篠機TD02において使用でき、またオートレベラ付きの練篠機、例えばTrutzschler社製練篠機TD03において使用することもできる。
【0019】
動作時、弾性的に付勢された板バネにおけるテンション掛けされた繊維スライバの接触圧力は、繊維スライバのカウンタ圧力よりも大きく、それにより、板バネは降伏(yield)するようになる。
【符号の説明】
【0020】
1 供給領域
2 サプライ領域
3 牽伸システム
4 カンコイラ
4.1 回転プレート
4.2 ケンス
5、5a〜5f 紡績ケンス
6 供給テーブル
7、7a〜7f 繊維スライバ
8a〜8c、 スライバ変路要素
10 水平方向バー
11a〜11h 円筒体
12 監視装置
12a カウンタ要素
12b1〜12b6 板バネ
121、122 延長小片
123 領域
124 端部領域
14 スライバファンネル
16 チューブ
17 電圧源
19 誘導式変位センサ
20 圧縮バネ
21 カウンタ取付部
191 プランジャコイル
192 プランジャモータ
【特許請求の範囲】
【請求項1】
繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置であって、移動する繊維スライバに接触して位置決めされる監視要素を使用しており、少なくとも一つの繊維スライバを延伸システムまで供給する供給装置の近傍または供給装置内に配置されるという監視装置であって、
前記繊維スライバ(7、7a〜7f)のための監視要素(12)は、テンションが掛けられた前記繊維スライバ(7、7a〜7f)により偏向されるよう配置された偏向要素(12b、12b1〜12b6)を含んでおり、前記繊維スライバ(7、7a〜7f)のテンションが喪失したときには、前記偏向要素はスイッチ動作を開始する、監視装置。
【請求項2】
前記監視要素が弾性的にテンション掛け可能である請求項1に記載の監視装置。
【請求項3】
前記監視要素が少なくとも部分的に金属を含んでいる請求項1または2に記載の監視装置。
【請求項4】
前記テンション掛けされた繊維スライバによって前記監視要素が非移動式カウンタ要素に対して持ち上げられるよう配置されている請求項1から3のいずれか一項に記載の監視装置。
【請求項5】
前記監視要素および前記カウンタ要素はスイッチ装置を形成する請求項1から4のいずれか一項に記載の監視装置。
【請求項6】
前記スイッチ装置は、前記監視要素が移動するときに電気パルスを発生することができる請求項1から5のいずれか一項に記載の監視装置。
【請求項7】
前記監視要素は板バネの形態をなしている請求項1から6のいずれか一項に記載の監視装置。
【請求項8】
前記監視要素は凸状に湾曲している請求項1から7のいずれか一項に記載の監視装置。
【請求項9】
前記スライバに対する前記監視要素の接触領域は平滑である請求項1から8のいずれか一項に記載の監視装置。
【請求項10】
前記テンション掛けされた繊維スライバは前記監視要素を弾性的に付勢する請求項1から9のいずれか一項に記載の監視装置。
【請求項11】
前記監視要素は固有の弾力性により付勢されるよう配置されている請求項1から10のいずれか一項に記載の監視装置。
【請求項12】
前記監視要素および前記カウンタ要素は接触式スイッチとして協働する請求項1から11のいずれか一項に記載の監視装置。
【請求項13】
前記監視装置前および前記カウンタ要素は非接触式スイッチとして協働する請求項1から12のいずれか一項に記載の監視装置。
【請求項14】
前記非接触式スイッチは測定装置である請求項1から13のいずれか一項に記載の監視装置。
【請求項15】
前記測定装置は近接イニシエータを含む請求項1から14のいずれか一項に記載の監視装置。
【請求項16】
前記測定装置は誘導性近接スイッチを含む請求項1から15のいずれか一項に記載の監視装置。
【請求項17】
前記移動は、前記繊維スライバのテンションの喪失により起動されるよう配置されている請求項1から16のいずれか一項に記載の監視装置。
【請求項18】
前記テンションの喪失は少なくとも一つの繊維スライバの停止により生じる請求項1から17のいずれか一項に記載の監視装置。
【請求項19】
前記テンションの喪失は少なくとも一つの繊維スライバの引裂または破断を通じて生じる請求項1から18のいずれか一項に記載の監視装置。
【請求項20】
前記スイッチ装置は前記機械の遮断装置に接続されている請求項1から19のいずれか一項に記載の監視装置。
【請求項21】
前記監視要素、例えば板バネ、および前記カウンタ要素は電圧源に接続されている請求項1から20のいずれか一項に記載の監視装置。
【請求項22】
前記カウンタ要素は少なくとも部分的に金属を含んでいる請求項1から21のいずれか一項に記載の監視装置。
【請求項23】
複数の監視要素、例えば板バネが保持要素、例えばチューブなどに取付けられている請求項1から22のいずれか一項に記載の監視装置。
【請求項24】
監視要素が繊維スライバのそれぞれに対して存在する請求項1から23のいずれか一項に記載の監視装置。
【請求項25】
前記監視要素は前記供給装置および前記延伸システムとの間に配置されている請求項1から24のいずれか一項に記載の監視装置。
【請求項26】
前記監視要素、例えば板バネ、および前記カウンタ要素は互いに電気的に絶縁されている請求項1から25のいずれか一項に記載の監視装置。
【請求項27】
テンションの喪失のときに、前記繊維スライバは重力により下方に偏向される請求項1から26のいずれか一項に記載の監視装置。
【請求項28】
前記偏向要素はバネ負荷されている請求項1から27のいずれか一項に記載の監視装置。
【請求項1】
繊維機械の延伸システム、例えば練篠機、カード機、コーマにおいて少なくとも一つの移動する繊維スライバを監視する監視装置であって、移動する繊維スライバに接触して位置決めされる監視要素を使用しており、少なくとも一つの繊維スライバを延伸システムまで供給する供給装置の近傍または供給装置内に配置されるという監視装置であって、
前記繊維スライバ(7、7a〜7f)のための監視要素(12)は、テンションが掛けられた前記繊維スライバ(7、7a〜7f)により偏向されるよう配置された偏向要素(12b、12b1〜12b6)を含んでおり、前記繊維スライバ(7、7a〜7f)のテンションが喪失したときには、前記偏向要素はスイッチ動作を開始する、監視装置。
【請求項2】
前記監視要素が弾性的にテンション掛け可能である請求項1に記載の監視装置。
【請求項3】
前記監視要素が少なくとも部分的に金属を含んでいる請求項1または2に記載の監視装置。
【請求項4】
前記テンション掛けされた繊維スライバによって前記監視要素が非移動式カウンタ要素に対して持ち上げられるよう配置されている請求項1から3のいずれか一項に記載の監視装置。
【請求項5】
前記監視要素および前記カウンタ要素はスイッチ装置を形成する請求項1から4のいずれか一項に記載の監視装置。
【請求項6】
前記スイッチ装置は、前記監視要素が移動するときに電気パルスを発生することができる請求項1から5のいずれか一項に記載の監視装置。
【請求項7】
前記監視要素は板バネの形態をなしている請求項1から6のいずれか一項に記載の監視装置。
【請求項8】
前記監視要素は凸状に湾曲している請求項1から7のいずれか一項に記載の監視装置。
【請求項9】
前記スライバに対する前記監視要素の接触領域は平滑である請求項1から8のいずれか一項に記載の監視装置。
【請求項10】
前記テンション掛けされた繊維スライバは前記監視要素を弾性的に付勢する請求項1から9のいずれか一項に記載の監視装置。
【請求項11】
前記監視要素は固有の弾力性により付勢されるよう配置されている請求項1から10のいずれか一項に記載の監視装置。
【請求項12】
前記監視要素および前記カウンタ要素は接触式スイッチとして協働する請求項1から11のいずれか一項に記載の監視装置。
【請求項13】
前記監視装置前および前記カウンタ要素は非接触式スイッチとして協働する請求項1から12のいずれか一項に記載の監視装置。
【請求項14】
前記非接触式スイッチは測定装置である請求項1から13のいずれか一項に記載の監視装置。
【請求項15】
前記測定装置は近接イニシエータを含む請求項1から14のいずれか一項に記載の監視装置。
【請求項16】
前記測定装置は誘導性近接スイッチを含む請求項1から15のいずれか一項に記載の監視装置。
【請求項17】
前記移動は、前記繊維スライバのテンションの喪失により起動されるよう配置されている請求項1から16のいずれか一項に記載の監視装置。
【請求項18】
前記テンションの喪失は少なくとも一つの繊維スライバの停止により生じる請求項1から17のいずれか一項に記載の監視装置。
【請求項19】
前記テンションの喪失は少なくとも一つの繊維スライバの引裂または破断を通じて生じる請求項1から18のいずれか一項に記載の監視装置。
【請求項20】
前記スイッチ装置は前記機械の遮断装置に接続されている請求項1から19のいずれか一項に記載の監視装置。
【請求項21】
前記監視要素、例えば板バネ、および前記カウンタ要素は電圧源に接続されている請求項1から20のいずれか一項に記載の監視装置。
【請求項22】
前記カウンタ要素は少なくとも部分的に金属を含んでいる請求項1から21のいずれか一項に記載の監視装置。
【請求項23】
複数の監視要素、例えば板バネが保持要素、例えばチューブなどに取付けられている請求項1から22のいずれか一項に記載の監視装置。
【請求項24】
監視要素が繊維スライバのそれぞれに対して存在する請求項1から23のいずれか一項に記載の監視装置。
【請求項25】
前記監視要素は前記供給装置および前記延伸システムとの間に配置されている請求項1から24のいずれか一項に記載の監視装置。
【請求項26】
前記監視要素、例えば板バネ、および前記カウンタ要素は互いに電気的に絶縁されている請求項1から25のいずれか一項に記載の監視装置。
【請求項27】
テンションの喪失のときに、前記繊維スライバは重力により下方に偏向される請求項1から26のいずれか一項に記載の監視装置。
【請求項28】
前記偏向要素はバネ負荷されている請求項1から27のいずれか一項に記載の監視装置。
【図1(a)】


【図1(b)】
【図2】

【図3】
【図4】

【図5】
【図1(b)】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−263858(P2009−263858A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2009−108101(P2009−108101)
【出願日】平成21年4月27日(2009.4.27)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成21年4月27日(2009.4.27)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
[ Back to top ]