
織物繊維から成る繊維スライバを分類もしくは選択し、特にコーミングすると共に供給デバイスを有する装置
【課題】簡素であり且つ時間当たりに生産される量を相当に増大する。
【解決手段】織物繊維から成る少なくとも一本の繊維スライバを分類もしくは選択し、特にコーミングする装置において、異なる送給器箇所から吐出された所定本数の繊維スライバを、繊維ラップを吐出する少なくとも一台の牽伸システム・ユニットの送給ローラ対に対して供給する供給デバイスと、上記牽伸システム・ユニットの下流に配置されたコーミング・デバイスとが在る。設備に関して簡素な様式で、時間当たりに製造される量(生産性)を相当に増大し得るために、上記コーミング・デバイスはロータ・コーミング機械であると共に、上記繊維ラップは直接的に上記ロータ・コーミング機械へと送給されるべく配置される。
【解決手段】織物繊維から成る少なくとも一本の繊維スライバを分類もしくは選択し、特にコーミングする装置において、異なる送給器箇所から吐出された所定本数の繊維スライバを、繊維ラップを吐出する少なくとも一台の牽伸システム・ユニットの送給ローラ対に対して供給する供給デバイスと、上記牽伸システム・ユニットの下流に配置されたコーミング・デバイスとが在る。設備に関して簡素な様式で、時間当たりに製造される量(生産性)を相当に増大し得るために、上記コーミング・デバイスはロータ・コーミング機械であると共に、上記繊維ラップは直接的に上記ロータ・コーミング機械へと送給されるべく配置される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、織物繊維から成る繊維スライバを繊維分類もしくは選択し、特にコーミングする装置に関する。そのような装置は、異なる送給器箇所から吐出された所定本数の繊維スライバを、繊維ラップを吐出する少なくとも一台の牽伸システム・ユニットの送給ローラ対に供給する供給デバイスと、上記牽伸システム・ユニットの下流に配置されたコーミング・デバイスとを有する。
【背景技術】
【0002】
綿のコーミング(combing)においては、カード・スライバが牽伸されると共に、ラップ(lap)の形態でロール上に巻回される。コーミングは、そのラップから短繊維を分離すると共に全ての繊維の平行度を高めるために使用される。その結果、平均繊維長は比較的に長くなることから、破壊強度は大きくなり、且つ、引き続き作製される原糸の均一性が高くなる。また上記ラップから分離された短寸片の繊維タフトに対して梳(す)き入れを行うことにより、梳き取りが不連続的に実施される。上記梳き入れの後、繊維タフト片は再び組み合わされる。綿の紡績においては、フラット・コーミング機械(flat combing machine)が使用される。
【0003】
公知の装置(EP 0 349 852 B1)において、送給軸架から到来する繊維スライバは3台の牽伸システムに供給され、牽伸された繊維スライバは次に相互に重ねて載置され(二重化され)、収集デバイスにおいて巻回ラップへと形成される。コーミング前処理機により前処理された巻回ラップをコーミング機械に供給するために、上記コーミング前処理機からの複数個の巻回ラップは、複数個の巻回ラップを受容する巻回ラップ収集容器を備えた搬送移動体に積載される。受容された巻回ラップは、上記収集容器上に位置決めされて、移動可能な上記搬送移動体によりコーミング機械まで搬送される。次に、上記コーミング機械の複数個のヘッドを充填する適切な位置において、巻回ラップは上記搬送移動体により上記収集容器から放出され、巻回ラップ用の非積荷芯管は上記搬送移動体により上記コーミング機械から取外されて該搬送移動体上の適切な容器内に収集される。上記搬送移動体の戻り行程の後で、各芯管は適切な受容ステーションにてまたは上記コーミング前処理機にて上記搬送移動体により放出される。そのような装置の欠点は、巻回ラップを作成する機器と該巻回ラップの搬送とに関して必要とされる負担である。更なる問題は、巻回ラップが丸められるときに、繊維ラップにおける平行整列を阻害するマット化プロセス(matting process)が行われることである。特定の不都合は、繊維ラップの上記コーミング機械への供給作用が、巻回ラップの形成および搬送により引き起こされる中断によって不連続とされることである。
【0004】
EP 1 586 682 Aは、たとえば8個のコーミング・ヘッドが次々と同時に動作するというコーミング機械を開示している。これらのコーミング・ヘッドの駆動は、各コーミング・ヘッドに隣接して配置された側方駆動手段により行われる。そのような側方駆動手段は、長手シャフトにより各コーミング・ヘッドの個別要素に駆動可能に接続されたギヤ・ユニットを有している。個々のコーミング・ヘッドにて形成された繊維スライバは、コンベア・テーブル上で次々と、後続の牽伸システムへと移送され、該牽伸システムにおいては、繊維スライバは牽伸されてから組み合わされて一般的なコーミング機械スライバを形成する。上記牽伸システムにおいて作成された繊維スライバは、次に、ファネル・ホィール(巻取器プレート)によりケンス内に投入される。上記コーミング機械の複数個のコーミング・ヘッドは各々、送給デバイスと、枢動的に取付けられた固定位置のニッパ・アセンブリと、上記ニッパ・アセンブリにより供給された繊維タフトを梳き取り処理するコーム・セグメントを有すると共に回転可能に取付けられた円形のコーム(comb)と、頂部コームと、梳き取り処理された繊維タフトを上記ニッパ・アセンブリから取り外す固定位置の取り外しデバイスとを有する。そのようなコーミング機械の欠点は特に、多数の機器が必要とされ且つ時間当たりの製造速度が低いことである。8個の個別のコーミング・ヘッドが在るものの、それらは合計で、8個の送給デバイス、8個の固定位置ニッパ・アセンブリ、コーム・セグメントを備えた8個の円形コーム、8個の頂部コーム、および、8個の取り外しデバイスを有している。特定の問題は、各コーミング・ヘッドの動作の不連続様式であることである。更なる欠点は、大きな質量の加速および反転移動から帰着するものであり、大きな動作速度が不可能であることである。最後に、機械の振動がかなりの量であるので、コーミング済みスライバの投入が不規則になる。更に、下側のニッパ・プレートのニッパ唇部と取外しシリンダの挟持点との間の隔たり即ち距離は、構造的かつ空間的に制限されている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
故に、本発明の基礎となる課題は、冒頭部にて記述された種類の装置であって、言及された不都合を解消すると共に、特に設備に関して簡素であり且つ時間当たりに生産される量(生産性)を相当に増大できるという装置を提供するに在る。
【課題を解決するための手段】
【0006】
この課題は、請求項1の特徴部分の特徴により解決される。
すなわち、1番目の発明によれば、織物繊維から成る少なくとも一本の繊維スライバを分類もしくは選択し、特にコーミングする装置であって、該装置は、異なる送給器箇所から吐出された所定本数の繊維スライバを、繊維ラップを吐出する少なくとも一台の牽伸システム・ユニットの送給ローラ対に供給する供給デバイスと、上記牽伸システム・ユニットの下流に配置されたコーミング・デバイスとを有する、という装置において、上記コーミング・デバイスはロータ・コーミング機械(2;21〜27)であると共に、上記繊維ラップ(16;161〜167)は直接的に且つ中断されることなしに上記ロータ・コーミング機械(2;21〜27)へと送給されるべく配置されており、中断されることなしに迅速に回転すべく回転可能に取付けられた少なくとも一個のローラ(12、13)が、供給手段(8;10、11、27a、27b、28a、28b)の下流に配置されることを特徴とする、装置が提供される。
【0007】
公知の装置と対照的に、繊維ラップをロータ・コーミング機械へと直接的に送給することによって、必要な機器の台数を相当に減少させられると共に、特に、繊維材料を連続的に処理することが可能となる。この利点は、公知のコーミング機械と異なり、上記ロータ・コーミング機械はまた、必要な機器の台数が減少され乍らも全体的には相当に増大された生産性が達成される様にも繊維材料の連続的な処理を可能にするという事実により強調される。
【0008】
請求項2乃至58は、本発明の好適な発展例を包含する。
2番目の発明によれば、1番目の発明において、前記送給器箇所は紡績用ケンスである。
3番目の発明によれば、1番目または2番目の発明において、前記送給器箇所はケンス無し繊維スライバ・パッケージである。
4番目の発明によれば、1番目から3番目のいずれかの発明において、少なくとも2台の牽伸システム・ユニットが存在する。
5番目の発明によれば、1番目から4番目のいずれかの発明において、スライバ二重化デバイスが、前記牽伸システムの下流に配置される。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記繊維ラップはラップ形成デバイスから直接的に送給されるべく配置される。
7番目の発明によれば、1番目から6番目のいずれかの発明において、前記繊維ラップは前記少なくとも一台の牽伸システム・ユニットから直接的に送給される。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記繊維ラップは前記スライバ二重化デバイスから直接的に送給されるべく配置される。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記繊維ラップは巻回ラップを形成することなしに送給されるべく配置される。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記繊維ラップは巻回ラップを搬送することなしに送給されるべく配置される。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記繊維ラップは巻回ラップを位置決めすることなしに送給されるべく配置される。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記繊維ラップは連続的に送給されるべく配置される。
13番目の発明によれば、1番目から12番目のいずれかの発明において、繊維スライバ(16;161〜163)(ラップ)が前記ロータ・コーミング機械(2;21〜27)に供給され、上記ロータ・コーミング機械においては、繊維スライバ(301〜303)の自由端部から所定距離にて該繊維スライバを挟持する挟持デバイス(18、19、20;21、22、23)が配備され、たとえば短繊維、ネップ、塵埃の如き非挟持構成要素をゆるめて上記自由端部から除去するために、上記繊維スライバ(301〜303)の挟持部位から上記自由端部までコーミング作用を生成する生成手段(15、31、32)が存在し、回転可能に取付けられた少なくとも一個のローラ(12、13)が前記供給手段(8;10、11、27a、27b、28a、28b)の下流に配置されており、該ローラは、当該ローラ(12、13)の周縁部の回りに離間して分布された上記繊維スライバ(16;301〜303)用挟持デバイス(18、19、20;21、22、23)を備えており、コーミング作用を生成する上記生成手段(15、31、32)(コーミング要素)は上記ローラ(13)の周縁部に関係付けられる。
14番目の発明によれば、1番目から13番目のいずれかの発明において、前記挟持デバイスは、コーミング作用を生成する前記生成手段(コーミング要素)と協働する。
15番目の発明によれば、1番目から14番目のいずれかの発明において、コーミング作用を生成する前記生成手段(コーミング要素)は、前記ローラの前記周縁部と対向して配置される。
16番目の発明によれば、1番目から15番目のいずれかの発明において、コーミング作用を生成する前記生成手段(コーミング要素)と前記挟持デバイスとの間にはスペースが在る。
17番目の発明によれば、1番目から16番目のいずれかの発明において、コーミング作用を生成する前記手段(コーミング要素)と前記ローラの前記周縁部との間にはスペースが在る。
18番目の発明によれば、1番目から17番目のいずれかの発明において、梳き取りの間において、梳き取り処理されつつある繊維スライバは、コーミング作用を生成する生成手段(コーミング要素)および挟持デバイスに係合する。
19番目の発明によれば、1番目から18番目のいずれかの発明において、前記供給手段は頂部コーム・ローラを備える。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記供給手段は、針布、ニードルなどを有するローラを備える。
21番目の発明によれば、1番目から20番目のいずれかの発明において、前記供給手段はコーム循環要素を備える。
22番目の発明によれば、1番目から21番目のいずれかの発明において、前記供給手段は2本の無限循環ベルトを備える。
23番目の発明によれば、1番目から22番目のいずれかの発明において、前記供給手段は少なくとも2個の送給ローラを備える。
24番目の発明によれば、1番目から23番目のいずれかの発明において、前記供給手段は低速送給ローラおよび送給テーブルを備える。
25番目の発明によれば、1番目から24番目のいずれかの発明において、前記供給手段は牽伸システムから形成される。
26番目の発明によれば、1番目から25番目のいずれかの発明において、前記供給手段と前記回転可能ローラとの間には頂部コームが配置される。
27番目の発明によれば、1番目から26番目のいずれかの発明において、前記供給手段は固定される。
28番目の発明によれば、1番目から27番目のいずれかの発明において、前記供給手段は前記繊維ラップを連続的に搬送する。
29番目の発明によれば、1番目から28番目のいずれかの発明において、前記供給手段により吐出された繊維スライバを段階的に個別の繊維タフトへと分離する分離手段が配備される。
30番目の発明によれば、1番目から29番目のいずれかの発明において、個別の繊維タフトを生成する前記手段は回転可能に取付けられた第1ローラを備える。
31番目の発明によれば、1番目から30番目のいずれかの発明において、前記第1ローラは、該第1ローラの周縁部の回りにおいて離間して分布された第1挟持デバイスを備える。
32番目の発明によれば、1番目から31番目のいずれかの発明において、前記第1挟持デバイスは各々、ニッパ・デバイスを有する。
33番目の発明によれば、1番目から32番目のいずれかの発明において、前記繊維タフトを、後続の繊維分類デバイス(コーミング・デバイス)へと移送する手段が在る。
34番目の発明によれば、1番目から33番目のいずれかの発明において、前記第1ローラは、前記繊維タフトを後続の繊維分類デバイス(コーミング・デバイス)へと移送するために配備される。
35番目の発明によれば、1番目から34番目のいずれかの発明において、前記繊維タフトを移送するときに第1挟持要素と第2挟持デバイスとが協働する。
36番目の発明によれば、1番目から35番目のいずれかの発明において、前記第1ローラに対して軸心的に平行に回転可能に取付けられた第2ローラが関係付けられる。
37番目の発明によれば、1番目から36番目のいずれかの発明において、前記第1ローラおよび前記第2ローラは相互に逆方向に回転する。
38番目の発明によれば、1番目から37番目のいずれかの発明において、前記第2ローラは、該ローラの周縁部の回りに離間して分布された第2挟持デバイスを備える。
39番目の発明によれば、1番目から38番目のいずれかの発明において、前記第2挟持デバイスは各々、ニッパ・デバイスを有する。
40番目の発明によれば、1番目から39番目のいずれかの発明において、前記ニッパ・デバイスは、回転可能または変位可能に取付けられた把持要素(上側ニッパ)を有する。
41番目の発明によれば、1番目から40番目のいずれかの発明において、前記ニッパ・デバイスは、固定的に取付けられた対向要素(下側ニッパ)を有する。
42番目の発明によれば、1番目から41番目のいずれかの発明において、前記第2挟持デバイスは、コーミング作用を生成する前記生成手段と協働する。
43番目の発明によれば、1番目から42番目のいずれかの発明において、コーミング作用を生成する前記生成手段は、前記第2ローラの外周縁から所定距離に配置される。
44番目の発明によれば、1番目から43番目のいずれかの発明において、前記第2ローラは取出しデバイスに関係付けられる。
45番目の発明によれば、1番目から44番目のいずれかの発明において、前記第2ローラ(コーミング・ロータ)に対して軸心的に平行に、回転可能に取付けられた取出しローラが在る。
46番目の発明によれば、1番目から45番目のいずれかの発明において、前記取出しローラの下流には牽伸デバイスが配置される。
47番目の発明によれば、1番目から46番目のいずれかの発明において、前記取出しローラの下流にはスライバ投入デバイスが配置される。
48番目の発明によれば、1番目から47番目のいずれかの発明において、前記スライバ投入デバイスは巻取器とケンスとを備える。
49番目の発明によれば、1番目から48番目のいずれかの発明において、前記スライバ投入デバイスは、巻取器と、ケンス無しスライバ・パッケージとを備える。
50番目の発明によれば、1番目から49番目のいずれかの発明において、2台以上のロータ・コーミング機械が存在する。
51番目の発明によれば、1番目から50番目のいずれかの発明において、各ロータ・コーミング機械の下流には牽伸システムが配置される。
52番目の発明によれば、1番目から51番目のいずれかの発明において、前記コーミング要素(31)は、たとえば回転清浄化ローラ(63)などの清浄化デバイスに関係付けられる。
53番目の発明によれば、1番目から52番目のいずれかの発明において、前記清浄化ローラ(63)は抽出デバイス(64)に関係付けられる。
54番目の発明によれば、1番目から53番目のいずれかの発明において、前記コーミング要素(32)は、たとえば回転清浄化ローラ(65)などの清浄化デバイスに関係付けられる。
55番目の発明によれば、1番目から54番目のいずれかの発明において、前記清浄化ローラ(65)は抽出デバイス(66)に関係付けられる。
56番目の発明によれば、1番目から55番目のいずれかの発明において、前記コーミング・デバイスはロータ・コーミング機械(2;21〜27)であり、且つ、前記繊維ラップ(16;161〜167)は上記ロータ・コーミング機械(2;21〜27)に直接的に送給される。
57番目の発明によれば、1番目から56番目のいずれかの発明において、供給された繊維スライバ(301、302)の吸引のために、少なくとも一台の吸引デバイス(52、53、54、55;56、57、58、59)が、前記供給手段(8;10、11、27a、27b、28a、28b)から前記第1ローラ(12)まで上記繊維スライバ(301)を取り込む領域において、および/または、上記第1ローラ(12)から前記第2ローラ(13)まで上記繊維材料(302)を取り込む領域において、前記挟持デバイスに関係付けられる。
58番目の発明によれば、1番目から57番目のいずれかの発明において、前記供給デバイスから前記第1ローラまで前記繊維スライバを吐出する領域において、および/または、上記第1ローラから前記第2ローラまで前記繊維材料を吐出する領域において、少なくとも一個の送風開口(39)が配備される。
【発明を実施するための最良の形態】
【0009】
本発明は、以下において図面中に示された好適実施例に関して相当に詳細に記述される。
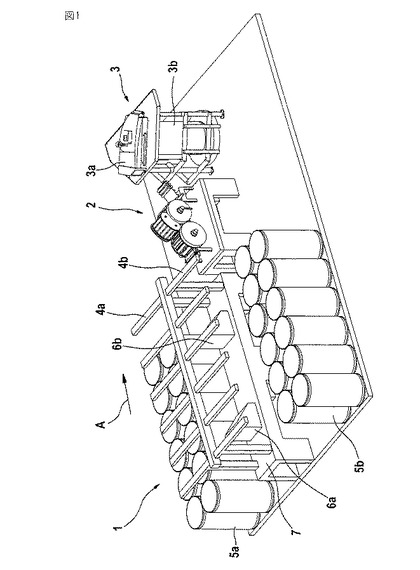
図1に依ると、コーミング前処理機1は、スライバの送給を受け且つラップを吐出する紡績機械と、相互に平行に配置された2個の送給テーブル4a、4b(軸架)とを有し、送給テーブル4a、4bの各々の下方には(不図示の)繊維スライバを収容する2列のケンス5a、5bが配置されている。ケンス5a、5bから引き出された繊維スライバは方向を変更された後で、相次いで配置されたコーミング前処理機1の2台の牽伸システム6a、6bへと進行する。形成された繊維スライバ・ウェブは、牽伸システム6aからウェブ・テーブル7に案内され、次いで牽伸システム6bの吐出口にては、相互に積み重ねて布置されると共に、牽伸システムにおいて作製された繊維スライバ・ウェブと束ねられる。牽伸システム6aおよび6bの夫々によって、複数本の繊維スライバは組み合わされてラップを形成すると共に一体的に牽伸される。牽伸された複数のラップ(実施例においては2枚のラップが示される)は、相互に重ねて載置されることで二重化される。その様に形成されたラップは、下流のロータ・コーミング機械2の供給デバイス(送給要素)へと直接的に導入される。繊維材料の流れは中断されない。コーミングされた繊維ウェブは、ロータ・コーミング機械2の吐出口にて吐出され、ファネル(図10(a)を参照)を通過してコーマ・スライバを形成し、次いで、下流のスライバ投入デバイス3へと投入される。参照符号Aは、動作方向を表す。
【0010】
オートレベラ牽伸システム50(図2を参照)が、ロータ・コーミング機械2とスライバ投入デバイス3との間に配置され得る。これにより、上記コーマ・スライバは牽伸される。
【0011】
更なる構成に依れば、1台以上のロータ・コーミング機械2が配備される。例えば2台のロータ・コーミング機械2aおよび2bが存在する場合には、吐出された2本のコーマ・スライバ17は、下流のオートレベラ牽伸システム50を一体的に通過して、牽伸された1本のコーマ・スライバとしてスライバ投入デバイス3に投入され得る。
【0012】
スライバ投入デバイス3は回転する巻取器ヘッド3aを備え、該ヘッドによりコーマ・スライバはケンス3b内に投入載置されるか、または、ケンス無しスライバ・パッケージの形態(不図示)で載置され得る。
【0013】
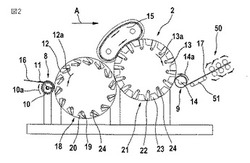
図2はロータ・コーミング機械2を示しており、ロータ・コーミング機械2は、送給ローラ10および送給トレイ11を備える供給デバイス8と、第1ローラ12(旋回ロータ)と、第2ローラ13(コーミング・ロータ)と、取出しローラ14を備える取出しデバイス9と、周回するカード頂部コーミング・アセンブリ15とを有している。これらローラ10、12、13および14の回転方向は夫々、湾曲矢印10a、12a、13aおよび14aにより示される。到来する繊維ラップは参照番号16により表されると共に、吐出された繊維ウェブは参照番号17により表される。ローラ10、12、13および14は、相次いで配置される。矢印Aは動作方向を表している。
【0014】
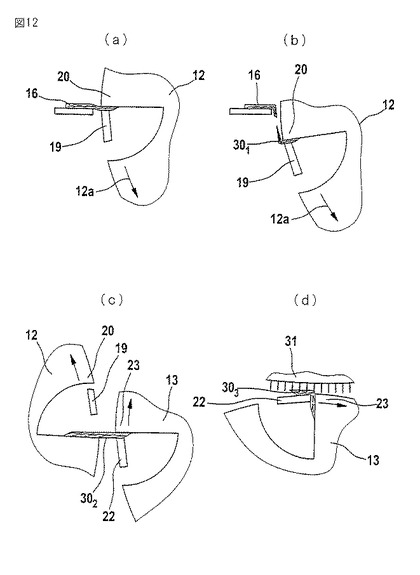
第1ローラ12、はその外周縁の領域において、複数個の第1挟持デバイス18(図3参照)を備えている。これら挟持デバイス18は、該ローラ12の幅に亙り延びていて各々が上側ニッパ19(把持要素)と下側ニッパ20(対向要素)とから構成されている。ローラ12の中心点もしくは枢動軸心を向く上記上側ニッパの一端領域において、各上側ニッパ19は、ローラ12に取付けられた枢動軸受24a(図11参照)に回転可能に取付けられている。下側ニッパ20は、固定されまたは移動可能とされ得るようにローラ12上に取付けられる(図11参照)。上側ニッパ19の自由端部は、ローラ12の周縁部に臨んでいる。上側ニッパ19および下側ニッパ20は、それらが繊維スライバ16、301、302を把持(挟持)し且つそれを解放する(図12(a)乃至図12(c)を参照)様に協働する。
【0015】
第2ローラ13は、その外周縁の領域において、複数個の二部材式挟持デバイス21を備えている。二部材式挟持デバイス21(図3参照)は、第2ローラ13の幅に亙り延びていて各々が上側ニッパ22(把持要素)と下側ニッパ23(対向要素)とから構成されている。ローラ13の中心点もしくは枢動軸心を向く上記上側ニッパの一端領域において、各上側ニッパ22は、ローラ13に取付けられた枢動軸受24b(図11参照)に回転可能に取付けられる。下側ニッパ23は、固定され(図8参照)または移動可能(図1参照)とされ得るようにローラ13上に取付けられる。上側ニッパ22の自由端部は、ローラ13の周縁部に臨んでいる。上側ニッパ22および下側ニッパ23は、それらが繊維スライバ302、303を把持(挟持)し且つそれを解放する(図8;図10(a)、図10(b);図12(c)、図12(d))様に協働する。ローラ12の場合には、送給ローラ10と第2ローラ13との間におけるローラ周縁部の回りで各挟持デバイス18は閉じられ(それらは一端にて(不図示の)繊維束を挟持し)、且つ、第2ローラ13と送給ローラ10との間におけるローラ周縁部の回りで各挟持デバイス18は開かれる。ローラ13においては、第1ローラ12とドッファ14との間におけるローラ周縁部の回りで各挟持デバイス21は閉じられ(それらは一端にて(不図示の)繊維束を挟持し)、且つ、ドッファ14と第1ローラ12との間におけるローラ周縁部の回りで各挟持デバイス21は開かれる。参照番号50は、たとえばオートレベラ牽伸システムなどの牽伸システム50を表している。牽伸システム50は好適には、巻取器ヘッド3aの上方に配置される。参照番号51は、たとえばコンベア・ベルトなどの、駆動されて上昇するコンベア51を表している。搬送目的で、上方へと傾斜された板金などを使用してもよい。
【0016】
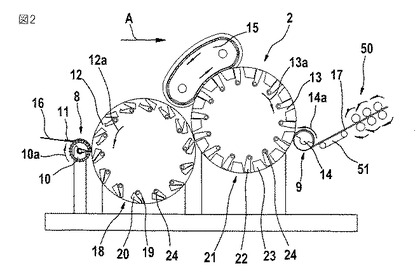
図3に依れば2個の固定式カム・ディスク25および26が配備され、第1挟持デバイス18を有するローラ12と第2挟持デバイス21を有するローラ13とがカム・ディスクの回りにて、夫々、矢印12aおよび13aの方向に回転される。積載された上側ニッパ19および22は、カム・ディスク25、26の外周縁とローラ12、13の内側円筒状表面との間の中間スペース内に配置される。カム・ディスク25および26の回りにおけるローラ12および13の回転により、上側ニッパ19および22は枢動軸心24aおよび24bの回りで回転される。その様にして、第1挟持デバイス18および第2挟持デバイス21の開閉動作が実施される。
【0017】
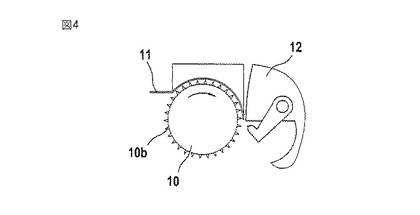
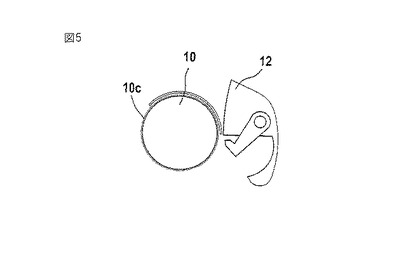
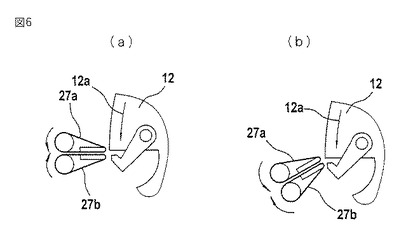
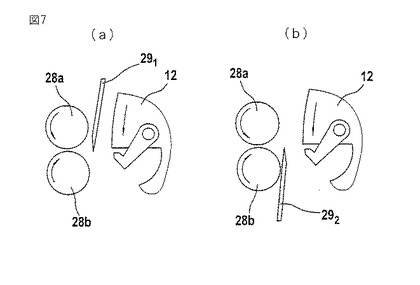
図4に依れば、送給ローラ10はその周縁部の回りに、上記幅に亙り軸心方向に平行に配置されたコーム・セグメント10bを有する。図5に依れば、送給ローラ10はその周縁部の回りに、針布10c、好適には全鋼針布を有する。図6(a)、図6(b)に依れば、上記供給デバイスは2本の無限回転ベルト27a、27bから成り、到来する繊維ラップ16のためのコンベア間隙がこれらベルト間に在る。図6(a)におけるコンベア間隙はローラ12に対して概ね径方向に配置され、図6(b)におけるコンベア間隙は回転方向12aに対向して配置される。図7(a)および図7(b)に依れば、(湾曲矢印を参照した回転方向に対して)送給ローラ対28a、28bと第1ローラ12との間には、頂部コーム291および292が夫々配置されている。頂部コーム291のコーム歯は上方から繊維ラップ16に係合し、且つ、頂部コーム292のコーム歯は下方から繊維ラップ16に係合する。
【0018】
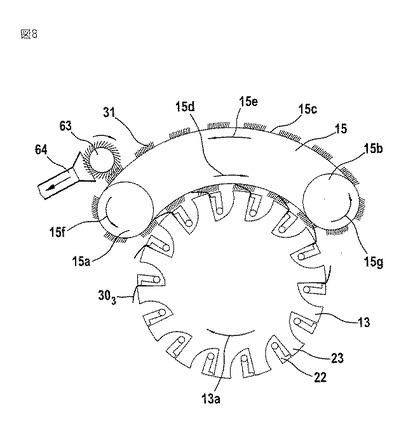
図8に依れば、幾つかの挟持デバイス21によって、各繊維束303はその一端にて、すなわちそれらの自由端部から所定距離にて、上側ニッパ22と下側ニッパ23との間で挟持される。その場合、繊維束303はそれらの自由端部の方向に屈曲され、該繊維束303の自由端部領域は各々、回転方向13aと逆方向に向けられる。周回する頂部コーミング・アセンブリ15は、2個の案内ローラ15aおよび15bの回りで無限に周回する可撓ベルト要素15cを備えており、可撓ベルト要素15cの外側部には、複数個のコーミング要素31を有するベルト要素15cが備えられている。コーミング要素31のコーム歯の自由端部はベルト要素15cから離間した方向を指している。コーミング要素31は、ローラ13の周縁部から所定距離における梳き取り領域に配置される。上記梳き取り領域においてベルト要素15cの運動方向15dおよびローラ13の運動方向13aは同一であり、すなわち同一方向動作が適用される。しかし、コーミング要素31を有するベルト要素15cの速度と、スライバ束303を含め挟持要素21を有するローラ13の速度とは異なり、すなわち、相対速度が適用される。上記作用領域(コーミング領域)におけるローラ13の円周速度は、コーミング要素31の運動の速度よりも大きい。
【0019】
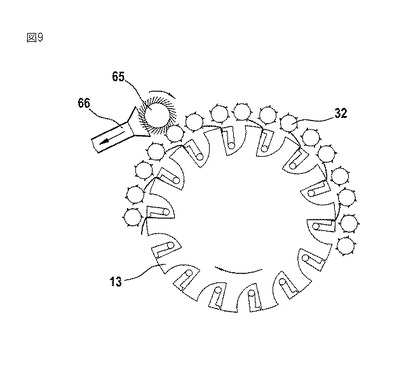
図9に依れば上記コーミング要素は、ドッファ14とローラ12との間の領域(図2参照)においてローラ13に対向して該ローラ13の周囲部から所定距離に位置する複数個の回転コーミング・ローラ32により形成される。
【0020】
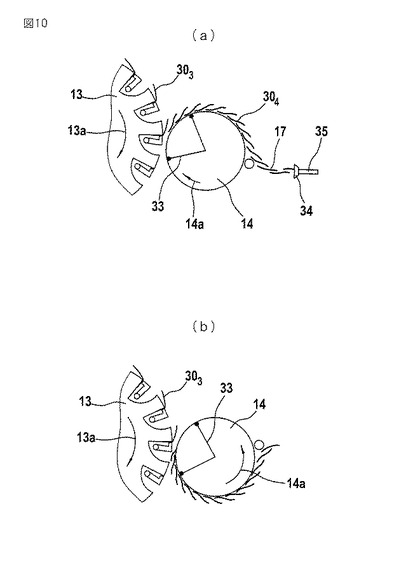
図10(a)に依れば、ローラ13およびドッファ14の回転方向13aおよび14aは同一(両方とも時計方向)である。結果として、逆方向の継ぎ合わせが実施される。コーミングされた繊維束304は、上記ドッファの円筒状表面上に屋根瓦の様式で相互に重ねて載置される。ドッファ14の内部においては、固定された篩要素33が在る。ドッファ14の円筒状表面は、空気透過性の開口を有する。ドッファ14と内側円筒状表面との間のスペースに負圧−pを掛けることにより、繊維束303はローラ13からドッファ14の外側円筒状表面上へと吸引される。篩要素33から外れたところで、すなわち負圧の無い領域においては、繊維束303はドッファ14の外側円筒状表面から取り外され得る。
【0021】
図10(b)に依ると、ローラ13およびドッファ14の回転方向13aおよび14aは相互に逆である。結果として、同一方向の継ぎ合わせが実施される。コーミングされた繊維束303は、図10(a)に係る構成に関して記述されたのと実質的に同様にドッファ14によってローラ13から移動される。ドッファ14の下流にはスライバ・ファネル34が在り、スライバ・ファネル34内には、重なり合う繊維束304が進入して、これらの繊維束はコーミング済みスライバ35として出射しまたは引き出される。
【0022】
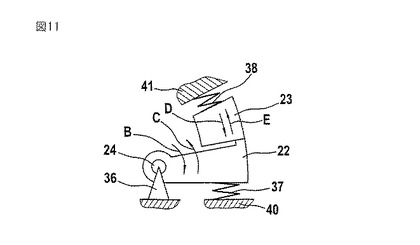
図11に依れば上側ニッパ22は実質的に単一アーム式の回転可能レバーアームの形態である。このレバーアームは、該レバーアームの一端領域において枢動軸心24の回りで矢印BおよびCの方向に回転可能である。軸受36がローラ13に取付けられている。上側ニッパ22は、たとえば圧縮スプリングなどのスプリング37によって弾性的に付勢される。この弾性的な付勢作用は、カム・ディスク26と協働し、それにより、上側ニッパ22がスプリング37の圧縮力に抗してカム・ディスク26(図3参照)により偏向される様になる。下側ニッパ23はその一端の領域において例えば圧縮スプリングであるスプリング38により弾性的に付勢されることから、下側ニッパ23は矢印DおよびEの方向に移動可能である。その結果、上側ニッパ22を閉じる際に下側ニッパ23における圧力衝撃は弾性的に緩衝され、繊維束303の振動、摩耗および劣化は相当に減少されるようになる。参照番号40および41は固定軸受を表し、該軸受上にはスプリング37および38の各々の一端が支持される。
【0023】
第1挟持デバイス18の上側ニッパ19および下側ニッパ20は、第2挟持デバイス21について図11に示された様式に対応する様式で弾性的に付勢され得る。
【0024】
図12(a)乃至図12(d)はロータ・コーミング機械2(ツー・ロータ式コーミング機械)の場合における繊維選択の動作シーケンスを概略形態で示しており、これら図面は相次ぐ時系列順にて以下の段階を示している:第1挟持デバイス18による、送給されたラップ16の挟持(図12(a))、第1ローラ12の回転方向12aにおける繊維タフト301の摘出(図12(b))、繊維タフト302が挟持されている上記挟持デバイスを開くことによるローラ12からローラ13への繊維タフト302の移送、および、コーミング要素31への推進係合による繊維タフト303のコーミング。
【0025】
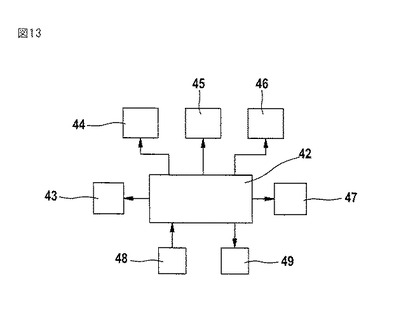
図13に依れば、たとえばマイクロプロセッサを備えたマイクロコンピュータなどの電子的制御/調整デバイス42(機械およびシステムの制御手段)が配備されている。電子的制御/調整デバイス42には、特に、ロータ・コーミング機械2のローラ10、12、13、14、および、周回するカード頂部アセンブリ15(案内ローラ15a)のための電気モータなどの駆動デバイス43、44、45、46、47が接続されている。参照番号48は入力デバイス48を表し、参照番号49は表示デバイス49を表している。好適には、コーミング前処理機1、牽伸システム50、コンベア・ベルト51と、スライバ投入デバイス3とのための駆動デバイスも接続される(不図示)。
【0026】
ローラ12および13が共通ギヤにより駆動される限りにおいて、該共通ギヤのための駆動モータは制御/調整デバイス42に接続される。
【0027】
たとえば、上記送給ローラに対する円周速度は約0.2〜1.0m/秒であり、第1ローラ12に対しては約2.0〜6.0m/秒、第2ローラ13に対しては約2.0〜6.0m/秒、上記ドッファに対しては約0.4〜1.5m/秒、および、上記周回するカード頂部アセンブリに対しては約1.5〜4.5m/秒である。第1ローラ12および第2ローラ13の直径は、たとえば約0.3m〜0.8mである。
【0028】
本発明に係る装置の動作モードおよび動作シーケンスは以下の通りである。
【0029】
ラップ調製:
複数本のスライバが組み合わされることでラップ16が形成され、一体的に牽伸される。複数枚のラップ16は、相互に重ねて載置されることで二重化され得る。結果的に形成されたラップ16は、ロータ・コーミング機械2の送給要素10内に直接的に導入される。材料の流れは、巻回ラップを形成することにより中断されることはない。
【0030】
送給:
フラット・コーミング機械と異なり、上流のラップ16はコンベア要素により連続的に送給される。送給される量は、第1ロータ12(旋回ロータ)のニッパ18(反転ニッパ)の2度の閉じ時点の間において搬送されるラップ16の長さにより決定される。
【0031】
挟持1:
ラップ16から外方に突出していて整列された繊維タフトは、第1ロータ12(旋回ロータ)の挟持ニッパ18(反転ニッパ)により挟持される。第1ロータ12の挟持デバイス18は、摘出機能を前提とする。
【0032】
摘出:
反転ニッパ18が配置された旋回ロータ12の回転の結果として、挟持された繊維タフトは送給されたラップから摘出されるが、反転ニッパ8により挟持されないラップ16における繊維は保持される様に、ラップ16に作用する保持力が必要とされる。上記保持力は、送給手段のコンベア要素により、または、送給トレイもしくは頂部コームの如き付加的手段により付与される。上記保持力を生成する上記要素は、頂部コームの機能を前提とする。
【0033】
挟持2:
繊維タフトは整列されると共に、第2ロータ13(コーミング・ロータ)の挟持デバイス21(コーミング・ニッパ)へと移送される。コーミング・デバイス21が閉じる時点における上記反転ニッパの挟持線と上記コーミング・ニッパの挟持線との間の距離により、上記隔たりが決定される。
【0034】
コーミング:
コーミング・ニッパ21から外方に突出する繊維タフトは、挟持されていない繊維であってコーミングにより排除される繊維を包含する。
【0035】
継ぎ合わせ(Piecing):
梳き取り処理された繊維タフト303は、取出しローラ14上に載置される。吸引により作用されていて空気透過性である取出しローラ14の表面によって、繊維タフトは、取出しローラ14上に載置されて緊張延伸される。各繊維タフトは相互に重ねて載置され、屋根瓦のように重なり合い、繊維部分のウェブ304を形成する。
【0036】
ウェブ取り外しおよびコーマ・スライバの形成:
ウェブ17は、吸引により影響されない取出しローラ14上の箇所において該取出しローラ14から取り外されると共に、ファネル34内へと案内される。
【0037】
コーマ・スライバ処置:
結果的に形成されたコーマ・スライバは二重化かつ牽伸されて(牽伸システム50)、次に、たとえば巻取器3aによりケンス3b内に投入される。
【0038】
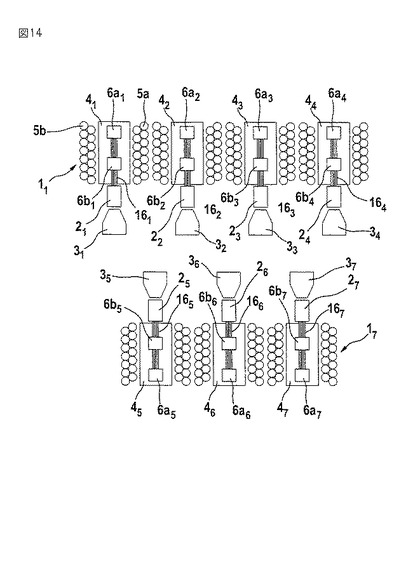
図14は、7台のコーミング前処理デバイス11〜17を備える配置構成を示し、夫々の場合において4列の繊維スライバ用ケンス5a、5bは供給軸架41〜47を有する(図1参照)。各供給軸架41〜47の下流には2つの牽伸システム6a1〜6a7および6b1〜6b7を備える牽伸システム・デバイスが配置され、該2つの牽伸システム6a1〜6a7および6b1〜6b7を備える各牽伸システム・デバイスの下流には、ラップ161〜167が直接的かつ連続的に送給されるロータ・コーミング機械21〜27が配置される。各ロータ・コーミング機械21〜27の下流には、スライバ投入デバイス31〜37が配置される。
【0039】
図8において参照番号は63は回転清浄化ローラを表し、該回転清浄化ローラは、梳き取られた繊維、ネップ(nep)、塵埃などの構成要素をコーミング要素31から解(ほぐ)すと共に、それらを収集/抽出デバイス56へと推進する。図9において各コーミング・ローラは同様に、抽出デバイス66を備えた清浄化ローラ65を備えている。
【0040】
本発明に係るロータ・コーミング機械2を用いると、たとえば3000〜5000ニップ/分などの、2000を超えるニップ/分が達成される。
【0041】
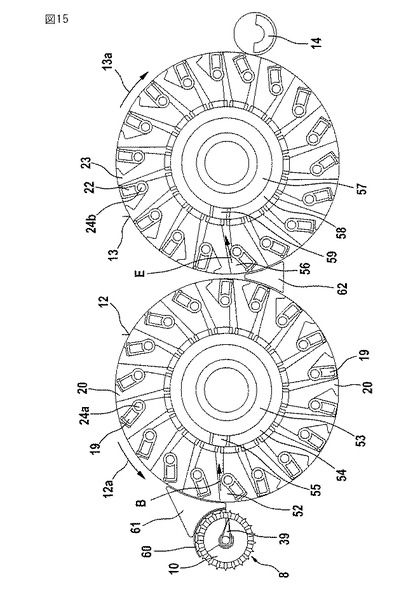
図15に依れば、挟持デバイス19、20および22、23を備えていて回転可能に取付けられたローラ12および13は、吸引チャネル52および56(吸引開口)を夫々付加的に備えている。供給デバイス8とローラ12との間における吐出領域およびローラ12および13の間における吐出領域において、吸引チャネル52、56は、搬送されつつある繊維の整列および移動に影響する。その様にして、供給デバイス8からの繊維材料を第1ローラ12上へと取り込むと共に第2ローラ13へと吐出するための時間は相当に減少され、それにより、ニップ速度は高められるようになる。吸引開口52、56はローラ12および13内に夫々配置されると共に、該ローラと共に回転する。各挟持デバイス19、20および22、23(ニッパ・デバイス)に対しては、少なくとも一個の吸引開口が関連付けられる。吸引開口52、56は各々、把持要素(上側ニッパ)と対向要素(下側ニッパ)との間に配置される。ロータ12、13の内部には、吸引開口52、56における吸引流により夫々生成された過小圧力領域53〜55および57〜59が在る。過小圧力は、流れ生成機に接続することにより生成され得る。個々の吸引開口52、56における吸引流は、該吸引流がローラ円周部上における特定の選択的角度位置においてのみ適用される様に、過小圧力領域と吸引開口との間において切換えられ得る。上記切換えの目的で、対応する角度位置において開口57および59を夫々備えたバルブもしくはバルブ管54、58が使用され得る。上記把持要素(上側ニッパ)の移動によって、吸引流の解除も達成され得る。更に、対応する角度位置においてのみ過小圧力の領域を配置できる。
【0042】
さらに、供給デバイス8の領域および/または各ローラ間の移送の領域においては、送風流が提供され得る。送風流の供給源(送風ノズル39)が送給ローラ10の内側に配置されると共に、該供給源は、上記供給デバイスの空気透過性表面または空気通路の開口を通じて、上記第1ローラの方向において外側に向かう効果を有する。さらに、供給デバイス8の領域において、送出される空気流を生成する上記要素は、該供給デバイス8の直下または直上において固定的に配置され得る。ローラ12、13間の移送の領域において、送出空気流源は、各ニッパ・デバイスの直下もしくは直上にて第1ローラ12の周縁部に配置され得る。送出空気を生成するために、圧縮空気ノズルまたは空気ブレードを使用してもよい。
【0043】
吸引流Bは好適には、案内だけでなく、供給デバイス8の領域において、ラップと、摘出されるべきタフトとの間の分離プロセスにも影響して、そのようなプロセスを短縮化し得る。
【0044】
付加的な空気案内要素60および側方篩61、62を配置した結果、上記流れの方向は影響され、各ロータにより回転して巻き込まれた空気が分離され得る。その様にして、設定に対する時間を更に短縮化できる。特に、ラップ上において第1ロータ12と供給デバイス8との間における篩要素、および、上記ローラの各側における篩要素は、有効であることが判明している。
【0045】
梳き取り処理された繊維部分303は、第2ローラ13から継ぎ合わせローラ14上へと通過する。
【0046】
本発明に係る上記ロータ・コーミング機械の使用に際しては、コーミングされるべき繊維材料の機械的コーミングが達成され、すなわち、コーミングのために機械的手段が用いられる。コーミングされるべき繊維材料の空気的コーミングは無く、すなわち、たとえば吸引および/または送出される空気流などの空気流は使用されない。
【0047】
本発明に係る上記ロータ・コーミング機械においては、中断されることなしに迅速に回転するローラであって挟持デバイスを有するというローラが存在する。中断を以て回転するローラ、段階的に回転するローラ、または、静止状態と回転状態との間において交互的に回転するローラは使用されない。
【図面の簡単な説明】
【0048】
【図1】コーミング前処理デバイスと、ロータ・コーミング機械と、スライバ投入デバイスとを備えていて繊維材料をコーミングするデバイスの概略的斜視図である。
【図2】2個のローラを有する本発明に係るロータ・コーミング機械の概略的側面図である。
【図3】2個のカム・ディスクを有する図2に係るロータ・コーミング機械の斜視図である。
【図4】供給手段としての頂部コーム・ローラを示す図である。
【図5】供給手段としての針布装着ローラを示す図である。
【図6】(a)供給手段としての二重ベルト・デバイスを示す図である。(b)供給手段としての二重ベルト・デバイスを示す他の図である。
【図7】(a)上方からの頂部コームを有する供給手段としての2個の送給ローラを示す図である。(b)下方からの頂部コームを有する供給手段としての2個の送給ローラを示す図である。
【図8】挟持デバイスと、コーミング要素のための回転頂部デバイスとを有する第2ローラ(コーミング・ローラ)の側面図である。
【図9】挟持デバイスと、コーミング要素としての円形コーム(コーム・ローラ)とを有する第2ローラ(コーミング・ローラ)の側面図である。
【図10】(a)第2ローラ(コーミング・ロータ)と、逆方向継ぎ合わせのための取出しローラとを示す図である。(b)第2ローラ(コーミング・ロータ)と、同一方向継ぎ合わせのための取出しローラとを示す図である。
【図11】スプリング負荷された上側ニッパ(把持要素)とスプリング負荷された下側ニッパ(対向要素)とを備える挟持デバイスの概略図である。
【図12】(a)〜(d)ツー・ロータ(two rotor)式コーミング機械の場合における繊維選択の動作シーケンスを概略形態で示す図である。
【図13】紡績用前処理機、ロータ紡機およびスライバ投入デバイスに対する電子的制御/調整デバイスを示すブロック回路図である。
【図14】7台のコーミング前処理機および7台のロータ・コーミング機械から成る配置構成の概略的平面図である。
【図15】複数個の吸引開口を含むロータ・コーミング機械の第1および第2ローラの概略的側面図である。
【符号の説明】
【0049】
1 コーミング前処理機
2、21〜27 ロータ・コーミング機械
3 スライバ投入デバイス
3a 巻取器
3b ケンス
4a、4b 送給テーブル
5a、5b 繊維スライバ用ケンス
6a、6b 牽伸システム
7 テーブル
8 供給デバイス
9 取出しデバイス
10 送給ローラ
12、13 ローラ
11 送給トレイ
15 頂部コーミング・アセンブリ
16、161〜167 繊維ラップ
18、19、20、21 挟持デバイス
22 上側ニッパ
23 下側ニッパ
27a、27b 無限回転ベルト
28a、28b 送給ローラ対
301〜304 繊維スライバ
31 コーミング要素
32 ローラ
33 篩要素
34 ファネル
42 電子的制御/調整デバイス
50 牽伸システム
51 コンベア
52 吸引チャネル
53〜55、57〜59 過小圧力領域
54、58 バルブ管
65 清浄化ローラ
66 抽出デバイス
【技術分野】
【0001】
本発明は、織物繊維から成る繊維スライバを繊維分類もしくは選択し、特にコーミングする装置に関する。そのような装置は、異なる送給器箇所から吐出された所定本数の繊維スライバを、繊維ラップを吐出する少なくとも一台の牽伸システム・ユニットの送給ローラ対に供給する供給デバイスと、上記牽伸システム・ユニットの下流に配置されたコーミング・デバイスとを有する。
【背景技術】
【0002】
綿のコーミング(combing)においては、カード・スライバが牽伸されると共に、ラップ(lap)の形態でロール上に巻回される。コーミングは、そのラップから短繊維を分離すると共に全ての繊維の平行度を高めるために使用される。その結果、平均繊維長は比較的に長くなることから、破壊強度は大きくなり、且つ、引き続き作製される原糸の均一性が高くなる。また上記ラップから分離された短寸片の繊維タフトに対して梳(す)き入れを行うことにより、梳き取りが不連続的に実施される。上記梳き入れの後、繊維タフト片は再び組み合わされる。綿の紡績においては、フラット・コーミング機械(flat combing machine)が使用される。
【0003】
公知の装置(EP 0 349 852 B1)において、送給軸架から到来する繊維スライバは3台の牽伸システムに供給され、牽伸された繊維スライバは次に相互に重ねて載置され(二重化され)、収集デバイスにおいて巻回ラップへと形成される。コーミング前処理機により前処理された巻回ラップをコーミング機械に供給するために、上記コーミング前処理機からの複数個の巻回ラップは、複数個の巻回ラップを受容する巻回ラップ収集容器を備えた搬送移動体に積載される。受容された巻回ラップは、上記収集容器上に位置決めされて、移動可能な上記搬送移動体によりコーミング機械まで搬送される。次に、上記コーミング機械の複数個のヘッドを充填する適切な位置において、巻回ラップは上記搬送移動体により上記収集容器から放出され、巻回ラップ用の非積荷芯管は上記搬送移動体により上記コーミング機械から取外されて該搬送移動体上の適切な容器内に収集される。上記搬送移動体の戻り行程の後で、各芯管は適切な受容ステーションにてまたは上記コーミング前処理機にて上記搬送移動体により放出される。そのような装置の欠点は、巻回ラップを作成する機器と該巻回ラップの搬送とに関して必要とされる負担である。更なる問題は、巻回ラップが丸められるときに、繊維ラップにおける平行整列を阻害するマット化プロセス(matting process)が行われることである。特定の不都合は、繊維ラップの上記コーミング機械への供給作用が、巻回ラップの形成および搬送により引き起こされる中断によって不連続とされることである。
【0004】
EP 1 586 682 Aは、たとえば8個のコーミング・ヘッドが次々と同時に動作するというコーミング機械を開示している。これらのコーミング・ヘッドの駆動は、各コーミング・ヘッドに隣接して配置された側方駆動手段により行われる。そのような側方駆動手段は、長手シャフトにより各コーミング・ヘッドの個別要素に駆動可能に接続されたギヤ・ユニットを有している。個々のコーミング・ヘッドにて形成された繊維スライバは、コンベア・テーブル上で次々と、後続の牽伸システムへと移送され、該牽伸システムにおいては、繊維スライバは牽伸されてから組み合わされて一般的なコーミング機械スライバを形成する。上記牽伸システムにおいて作成された繊維スライバは、次に、ファネル・ホィール(巻取器プレート)によりケンス内に投入される。上記コーミング機械の複数個のコーミング・ヘッドは各々、送給デバイスと、枢動的に取付けられた固定位置のニッパ・アセンブリと、上記ニッパ・アセンブリにより供給された繊維タフトを梳き取り処理するコーム・セグメントを有すると共に回転可能に取付けられた円形のコーム(comb)と、頂部コームと、梳き取り処理された繊維タフトを上記ニッパ・アセンブリから取り外す固定位置の取り外しデバイスとを有する。そのようなコーミング機械の欠点は特に、多数の機器が必要とされ且つ時間当たりの製造速度が低いことである。8個の個別のコーミング・ヘッドが在るものの、それらは合計で、8個の送給デバイス、8個の固定位置ニッパ・アセンブリ、コーム・セグメントを備えた8個の円形コーム、8個の頂部コーム、および、8個の取り外しデバイスを有している。特定の問題は、各コーミング・ヘッドの動作の不連続様式であることである。更なる欠点は、大きな質量の加速および反転移動から帰着するものであり、大きな動作速度が不可能であることである。最後に、機械の振動がかなりの量であるので、コーミング済みスライバの投入が不規則になる。更に、下側のニッパ・プレートのニッパ唇部と取外しシリンダの挟持点との間の隔たり即ち距離は、構造的かつ空間的に制限されている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
故に、本発明の基礎となる課題は、冒頭部にて記述された種類の装置であって、言及された不都合を解消すると共に、特に設備に関して簡素であり且つ時間当たりに生産される量(生産性)を相当に増大できるという装置を提供するに在る。
【課題を解決するための手段】
【0006】
この課題は、請求項1の特徴部分の特徴により解決される。
すなわち、1番目の発明によれば、織物繊維から成る少なくとも一本の繊維スライバを分類もしくは選択し、特にコーミングする装置であって、該装置は、異なる送給器箇所から吐出された所定本数の繊維スライバを、繊維ラップを吐出する少なくとも一台の牽伸システム・ユニットの送給ローラ対に供給する供給デバイスと、上記牽伸システム・ユニットの下流に配置されたコーミング・デバイスとを有する、という装置において、上記コーミング・デバイスはロータ・コーミング機械(2;21〜27)であると共に、上記繊維ラップ(16;161〜167)は直接的に且つ中断されることなしに上記ロータ・コーミング機械(2;21〜27)へと送給されるべく配置されており、中断されることなしに迅速に回転すべく回転可能に取付けられた少なくとも一個のローラ(12、13)が、供給手段(8;10、11、27a、27b、28a、28b)の下流に配置されることを特徴とする、装置が提供される。
【0007】
公知の装置と対照的に、繊維ラップをロータ・コーミング機械へと直接的に送給することによって、必要な機器の台数を相当に減少させられると共に、特に、繊維材料を連続的に処理することが可能となる。この利点は、公知のコーミング機械と異なり、上記ロータ・コーミング機械はまた、必要な機器の台数が減少され乍らも全体的には相当に増大された生産性が達成される様にも繊維材料の連続的な処理を可能にするという事実により強調される。
【0008】
請求項2乃至58は、本発明の好適な発展例を包含する。
2番目の発明によれば、1番目の発明において、前記送給器箇所は紡績用ケンスである。
3番目の発明によれば、1番目または2番目の発明において、前記送給器箇所はケンス無し繊維スライバ・パッケージである。
4番目の発明によれば、1番目から3番目のいずれかの発明において、少なくとも2台の牽伸システム・ユニットが存在する。
5番目の発明によれば、1番目から4番目のいずれかの発明において、スライバ二重化デバイスが、前記牽伸システムの下流に配置される。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記繊維ラップはラップ形成デバイスから直接的に送給されるべく配置される。
7番目の発明によれば、1番目から6番目のいずれかの発明において、前記繊維ラップは前記少なくとも一台の牽伸システム・ユニットから直接的に送給される。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記繊維ラップは前記スライバ二重化デバイスから直接的に送給されるべく配置される。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記繊維ラップは巻回ラップを形成することなしに送給されるべく配置される。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記繊維ラップは巻回ラップを搬送することなしに送給されるべく配置される。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記繊維ラップは巻回ラップを位置決めすることなしに送給されるべく配置される。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記繊維ラップは連続的に送給されるべく配置される。
13番目の発明によれば、1番目から12番目のいずれかの発明において、繊維スライバ(16;161〜163)(ラップ)が前記ロータ・コーミング機械(2;21〜27)に供給され、上記ロータ・コーミング機械においては、繊維スライバ(301〜303)の自由端部から所定距離にて該繊維スライバを挟持する挟持デバイス(18、19、20;21、22、23)が配備され、たとえば短繊維、ネップ、塵埃の如き非挟持構成要素をゆるめて上記自由端部から除去するために、上記繊維スライバ(301〜303)の挟持部位から上記自由端部までコーミング作用を生成する生成手段(15、31、32)が存在し、回転可能に取付けられた少なくとも一個のローラ(12、13)が前記供給手段(8;10、11、27a、27b、28a、28b)の下流に配置されており、該ローラは、当該ローラ(12、13)の周縁部の回りに離間して分布された上記繊維スライバ(16;301〜303)用挟持デバイス(18、19、20;21、22、23)を備えており、コーミング作用を生成する上記生成手段(15、31、32)(コーミング要素)は上記ローラ(13)の周縁部に関係付けられる。
14番目の発明によれば、1番目から13番目のいずれかの発明において、前記挟持デバイスは、コーミング作用を生成する前記生成手段(コーミング要素)と協働する。
15番目の発明によれば、1番目から14番目のいずれかの発明において、コーミング作用を生成する前記生成手段(コーミング要素)は、前記ローラの前記周縁部と対向して配置される。
16番目の発明によれば、1番目から15番目のいずれかの発明において、コーミング作用を生成する前記生成手段(コーミング要素)と前記挟持デバイスとの間にはスペースが在る。
17番目の発明によれば、1番目から16番目のいずれかの発明において、コーミング作用を生成する前記手段(コーミング要素)と前記ローラの前記周縁部との間にはスペースが在る。
18番目の発明によれば、1番目から17番目のいずれかの発明において、梳き取りの間において、梳き取り処理されつつある繊維スライバは、コーミング作用を生成する生成手段(コーミング要素)および挟持デバイスに係合する。
19番目の発明によれば、1番目から18番目のいずれかの発明において、前記供給手段は頂部コーム・ローラを備える。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記供給手段は、針布、ニードルなどを有するローラを備える。
21番目の発明によれば、1番目から20番目のいずれかの発明において、前記供給手段はコーム循環要素を備える。
22番目の発明によれば、1番目から21番目のいずれかの発明において、前記供給手段は2本の無限循環ベルトを備える。
23番目の発明によれば、1番目から22番目のいずれかの発明において、前記供給手段は少なくとも2個の送給ローラを備える。
24番目の発明によれば、1番目から23番目のいずれかの発明において、前記供給手段は低速送給ローラおよび送給テーブルを備える。
25番目の発明によれば、1番目から24番目のいずれかの発明において、前記供給手段は牽伸システムから形成される。
26番目の発明によれば、1番目から25番目のいずれかの発明において、前記供給手段と前記回転可能ローラとの間には頂部コームが配置される。
27番目の発明によれば、1番目から26番目のいずれかの発明において、前記供給手段は固定される。
28番目の発明によれば、1番目から27番目のいずれかの発明において、前記供給手段は前記繊維ラップを連続的に搬送する。
29番目の発明によれば、1番目から28番目のいずれかの発明において、前記供給手段により吐出された繊維スライバを段階的に個別の繊維タフトへと分離する分離手段が配備される。
30番目の発明によれば、1番目から29番目のいずれかの発明において、個別の繊維タフトを生成する前記手段は回転可能に取付けられた第1ローラを備える。
31番目の発明によれば、1番目から30番目のいずれかの発明において、前記第1ローラは、該第1ローラの周縁部の回りにおいて離間して分布された第1挟持デバイスを備える。
32番目の発明によれば、1番目から31番目のいずれかの発明において、前記第1挟持デバイスは各々、ニッパ・デバイスを有する。
33番目の発明によれば、1番目から32番目のいずれかの発明において、前記繊維タフトを、後続の繊維分類デバイス(コーミング・デバイス)へと移送する手段が在る。
34番目の発明によれば、1番目から33番目のいずれかの発明において、前記第1ローラは、前記繊維タフトを後続の繊維分類デバイス(コーミング・デバイス)へと移送するために配備される。
35番目の発明によれば、1番目から34番目のいずれかの発明において、前記繊維タフトを移送するときに第1挟持要素と第2挟持デバイスとが協働する。
36番目の発明によれば、1番目から35番目のいずれかの発明において、前記第1ローラに対して軸心的に平行に回転可能に取付けられた第2ローラが関係付けられる。
37番目の発明によれば、1番目から36番目のいずれかの発明において、前記第1ローラおよび前記第2ローラは相互に逆方向に回転する。
38番目の発明によれば、1番目から37番目のいずれかの発明において、前記第2ローラは、該ローラの周縁部の回りに離間して分布された第2挟持デバイスを備える。
39番目の発明によれば、1番目から38番目のいずれかの発明において、前記第2挟持デバイスは各々、ニッパ・デバイスを有する。
40番目の発明によれば、1番目から39番目のいずれかの発明において、前記ニッパ・デバイスは、回転可能または変位可能に取付けられた把持要素(上側ニッパ)を有する。
41番目の発明によれば、1番目から40番目のいずれかの発明において、前記ニッパ・デバイスは、固定的に取付けられた対向要素(下側ニッパ)を有する。
42番目の発明によれば、1番目から41番目のいずれかの発明において、前記第2挟持デバイスは、コーミング作用を生成する前記生成手段と協働する。
43番目の発明によれば、1番目から42番目のいずれかの発明において、コーミング作用を生成する前記生成手段は、前記第2ローラの外周縁から所定距離に配置される。
44番目の発明によれば、1番目から43番目のいずれかの発明において、前記第2ローラは取出しデバイスに関係付けられる。
45番目の発明によれば、1番目から44番目のいずれかの発明において、前記第2ローラ(コーミング・ロータ)に対して軸心的に平行に、回転可能に取付けられた取出しローラが在る。
46番目の発明によれば、1番目から45番目のいずれかの発明において、前記取出しローラの下流には牽伸デバイスが配置される。
47番目の発明によれば、1番目から46番目のいずれかの発明において、前記取出しローラの下流にはスライバ投入デバイスが配置される。
48番目の発明によれば、1番目から47番目のいずれかの発明において、前記スライバ投入デバイスは巻取器とケンスとを備える。
49番目の発明によれば、1番目から48番目のいずれかの発明において、前記スライバ投入デバイスは、巻取器と、ケンス無しスライバ・パッケージとを備える。
50番目の発明によれば、1番目から49番目のいずれかの発明において、2台以上のロータ・コーミング機械が存在する。
51番目の発明によれば、1番目から50番目のいずれかの発明において、各ロータ・コーミング機械の下流には牽伸システムが配置される。
52番目の発明によれば、1番目から51番目のいずれかの発明において、前記コーミング要素(31)は、たとえば回転清浄化ローラ(63)などの清浄化デバイスに関係付けられる。
53番目の発明によれば、1番目から52番目のいずれかの発明において、前記清浄化ローラ(63)は抽出デバイス(64)に関係付けられる。
54番目の発明によれば、1番目から53番目のいずれかの発明において、前記コーミング要素(32)は、たとえば回転清浄化ローラ(65)などの清浄化デバイスに関係付けられる。
55番目の発明によれば、1番目から54番目のいずれかの発明において、前記清浄化ローラ(65)は抽出デバイス(66)に関係付けられる。
56番目の発明によれば、1番目から55番目のいずれかの発明において、前記コーミング・デバイスはロータ・コーミング機械(2;21〜27)であり、且つ、前記繊維ラップ(16;161〜167)は上記ロータ・コーミング機械(2;21〜27)に直接的に送給される。
57番目の発明によれば、1番目から56番目のいずれかの発明において、供給された繊維スライバ(301、302)の吸引のために、少なくとも一台の吸引デバイス(52、53、54、55;56、57、58、59)が、前記供給手段(8;10、11、27a、27b、28a、28b)から前記第1ローラ(12)まで上記繊維スライバ(301)を取り込む領域において、および/または、上記第1ローラ(12)から前記第2ローラ(13)まで上記繊維材料(302)を取り込む領域において、前記挟持デバイスに関係付けられる。
58番目の発明によれば、1番目から57番目のいずれかの発明において、前記供給デバイスから前記第1ローラまで前記繊維スライバを吐出する領域において、および/または、上記第1ローラから前記第2ローラまで前記繊維材料を吐出する領域において、少なくとも一個の送風開口(39)が配備される。
【発明を実施するための最良の形態】
【0009】
本発明は、以下において図面中に示された好適実施例に関して相当に詳細に記述される。
図1に依ると、コーミング前処理機1は、スライバの送給を受け且つラップを吐出する紡績機械と、相互に平行に配置された2個の送給テーブル4a、4b(軸架)とを有し、送給テーブル4a、4bの各々の下方には(不図示の)繊維スライバを収容する2列のケンス5a、5bが配置されている。ケンス5a、5bから引き出された繊維スライバは方向を変更された後で、相次いで配置されたコーミング前処理機1の2台の牽伸システム6a、6bへと進行する。形成された繊維スライバ・ウェブは、牽伸システム6aからウェブ・テーブル7に案内され、次いで牽伸システム6bの吐出口にては、相互に積み重ねて布置されると共に、牽伸システムにおいて作製された繊維スライバ・ウェブと束ねられる。牽伸システム6aおよび6bの夫々によって、複数本の繊維スライバは組み合わされてラップを形成すると共に一体的に牽伸される。牽伸された複数のラップ(実施例においては2枚のラップが示される)は、相互に重ねて載置されることで二重化される。その様に形成されたラップは、下流のロータ・コーミング機械2の供給デバイス(送給要素)へと直接的に導入される。繊維材料の流れは中断されない。コーミングされた繊維ウェブは、ロータ・コーミング機械2の吐出口にて吐出され、ファネル(図10(a)を参照)を通過してコーマ・スライバを形成し、次いで、下流のスライバ投入デバイス3へと投入される。参照符号Aは、動作方向を表す。
【0010】
オートレベラ牽伸システム50(図2を参照)が、ロータ・コーミング機械2とスライバ投入デバイス3との間に配置され得る。これにより、上記コーマ・スライバは牽伸される。
【0011】
更なる構成に依れば、1台以上のロータ・コーミング機械2が配備される。例えば2台のロータ・コーミング機械2aおよび2bが存在する場合には、吐出された2本のコーマ・スライバ17は、下流のオートレベラ牽伸システム50を一体的に通過して、牽伸された1本のコーマ・スライバとしてスライバ投入デバイス3に投入され得る。
【0012】
スライバ投入デバイス3は回転する巻取器ヘッド3aを備え、該ヘッドによりコーマ・スライバはケンス3b内に投入載置されるか、または、ケンス無しスライバ・パッケージの形態(不図示)で載置され得る。
【0013】
図2はロータ・コーミング機械2を示しており、ロータ・コーミング機械2は、送給ローラ10および送給トレイ11を備える供給デバイス8と、第1ローラ12(旋回ロータ)と、第2ローラ13(コーミング・ロータ)と、取出しローラ14を備える取出しデバイス9と、周回するカード頂部コーミング・アセンブリ15とを有している。これらローラ10、12、13および14の回転方向は夫々、湾曲矢印10a、12a、13aおよび14aにより示される。到来する繊維ラップは参照番号16により表されると共に、吐出された繊維ウェブは参照番号17により表される。ローラ10、12、13および14は、相次いで配置される。矢印Aは動作方向を表している。
【0014】
第1ローラ12、はその外周縁の領域において、複数個の第1挟持デバイス18(図3参照)を備えている。これら挟持デバイス18は、該ローラ12の幅に亙り延びていて各々が上側ニッパ19(把持要素)と下側ニッパ20(対向要素)とから構成されている。ローラ12の中心点もしくは枢動軸心を向く上記上側ニッパの一端領域において、各上側ニッパ19は、ローラ12に取付けられた枢動軸受24a(図11参照)に回転可能に取付けられている。下側ニッパ20は、固定されまたは移動可能とされ得るようにローラ12上に取付けられる(図11参照)。上側ニッパ19の自由端部は、ローラ12の周縁部に臨んでいる。上側ニッパ19および下側ニッパ20は、それらが繊維スライバ16、301、302を把持(挟持)し且つそれを解放する(図12(a)乃至図12(c)を参照)様に協働する。
【0015】
第2ローラ13は、その外周縁の領域において、複数個の二部材式挟持デバイス21を備えている。二部材式挟持デバイス21(図3参照)は、第2ローラ13の幅に亙り延びていて各々が上側ニッパ22(把持要素)と下側ニッパ23(対向要素)とから構成されている。ローラ13の中心点もしくは枢動軸心を向く上記上側ニッパの一端領域において、各上側ニッパ22は、ローラ13に取付けられた枢動軸受24b(図11参照)に回転可能に取付けられる。下側ニッパ23は、固定され(図8参照)または移動可能(図1参照)とされ得るようにローラ13上に取付けられる。上側ニッパ22の自由端部は、ローラ13の周縁部に臨んでいる。上側ニッパ22および下側ニッパ23は、それらが繊維スライバ302、303を把持(挟持)し且つそれを解放する(図8;図10(a)、図10(b);図12(c)、図12(d))様に協働する。ローラ12の場合には、送給ローラ10と第2ローラ13との間におけるローラ周縁部の回りで各挟持デバイス18は閉じられ(それらは一端にて(不図示の)繊維束を挟持し)、且つ、第2ローラ13と送給ローラ10との間におけるローラ周縁部の回りで各挟持デバイス18は開かれる。ローラ13においては、第1ローラ12とドッファ14との間におけるローラ周縁部の回りで各挟持デバイス21は閉じられ(それらは一端にて(不図示の)繊維束を挟持し)、且つ、ドッファ14と第1ローラ12との間におけるローラ周縁部の回りで各挟持デバイス21は開かれる。参照番号50は、たとえばオートレベラ牽伸システムなどの牽伸システム50を表している。牽伸システム50は好適には、巻取器ヘッド3aの上方に配置される。参照番号51は、たとえばコンベア・ベルトなどの、駆動されて上昇するコンベア51を表している。搬送目的で、上方へと傾斜された板金などを使用してもよい。
【0016】
図3に依れば2個の固定式カム・ディスク25および26が配備され、第1挟持デバイス18を有するローラ12と第2挟持デバイス21を有するローラ13とがカム・ディスクの回りにて、夫々、矢印12aおよび13aの方向に回転される。積載された上側ニッパ19および22は、カム・ディスク25、26の外周縁とローラ12、13の内側円筒状表面との間の中間スペース内に配置される。カム・ディスク25および26の回りにおけるローラ12および13の回転により、上側ニッパ19および22は枢動軸心24aおよび24bの回りで回転される。その様にして、第1挟持デバイス18および第2挟持デバイス21の開閉動作が実施される。
【0017】
図4に依れば、送給ローラ10はその周縁部の回りに、上記幅に亙り軸心方向に平行に配置されたコーム・セグメント10bを有する。図5に依れば、送給ローラ10はその周縁部の回りに、針布10c、好適には全鋼針布を有する。図6(a)、図6(b)に依れば、上記供給デバイスは2本の無限回転ベルト27a、27bから成り、到来する繊維ラップ16のためのコンベア間隙がこれらベルト間に在る。図6(a)におけるコンベア間隙はローラ12に対して概ね径方向に配置され、図6(b)におけるコンベア間隙は回転方向12aに対向して配置される。図7(a)および図7(b)に依れば、(湾曲矢印を参照した回転方向に対して)送給ローラ対28a、28bと第1ローラ12との間には、頂部コーム291および292が夫々配置されている。頂部コーム291のコーム歯は上方から繊維ラップ16に係合し、且つ、頂部コーム292のコーム歯は下方から繊維ラップ16に係合する。
【0018】
図8に依れば、幾つかの挟持デバイス21によって、各繊維束303はその一端にて、すなわちそれらの自由端部から所定距離にて、上側ニッパ22と下側ニッパ23との間で挟持される。その場合、繊維束303はそれらの自由端部の方向に屈曲され、該繊維束303の自由端部領域は各々、回転方向13aと逆方向に向けられる。周回する頂部コーミング・アセンブリ15は、2個の案内ローラ15aおよび15bの回りで無限に周回する可撓ベルト要素15cを備えており、可撓ベルト要素15cの外側部には、複数個のコーミング要素31を有するベルト要素15cが備えられている。コーミング要素31のコーム歯の自由端部はベルト要素15cから離間した方向を指している。コーミング要素31は、ローラ13の周縁部から所定距離における梳き取り領域に配置される。上記梳き取り領域においてベルト要素15cの運動方向15dおよびローラ13の運動方向13aは同一であり、すなわち同一方向動作が適用される。しかし、コーミング要素31を有するベルト要素15cの速度と、スライバ束303を含め挟持要素21を有するローラ13の速度とは異なり、すなわち、相対速度が適用される。上記作用領域(コーミング領域)におけるローラ13の円周速度は、コーミング要素31の運動の速度よりも大きい。
【0019】
図9に依れば上記コーミング要素は、ドッファ14とローラ12との間の領域(図2参照)においてローラ13に対向して該ローラ13の周囲部から所定距離に位置する複数個の回転コーミング・ローラ32により形成される。
【0020】
図10(a)に依れば、ローラ13およびドッファ14の回転方向13aおよび14aは同一(両方とも時計方向)である。結果として、逆方向の継ぎ合わせが実施される。コーミングされた繊維束304は、上記ドッファの円筒状表面上に屋根瓦の様式で相互に重ねて載置される。ドッファ14の内部においては、固定された篩要素33が在る。ドッファ14の円筒状表面は、空気透過性の開口を有する。ドッファ14と内側円筒状表面との間のスペースに負圧−pを掛けることにより、繊維束303はローラ13からドッファ14の外側円筒状表面上へと吸引される。篩要素33から外れたところで、すなわち負圧の無い領域においては、繊維束303はドッファ14の外側円筒状表面から取り外され得る。
【0021】
図10(b)に依ると、ローラ13およびドッファ14の回転方向13aおよび14aは相互に逆である。結果として、同一方向の継ぎ合わせが実施される。コーミングされた繊維束303は、図10(a)に係る構成に関して記述されたのと実質的に同様にドッファ14によってローラ13から移動される。ドッファ14の下流にはスライバ・ファネル34が在り、スライバ・ファネル34内には、重なり合う繊維束304が進入して、これらの繊維束はコーミング済みスライバ35として出射しまたは引き出される。
【0022】
図11に依れば上側ニッパ22は実質的に単一アーム式の回転可能レバーアームの形態である。このレバーアームは、該レバーアームの一端領域において枢動軸心24の回りで矢印BおよびCの方向に回転可能である。軸受36がローラ13に取付けられている。上側ニッパ22は、たとえば圧縮スプリングなどのスプリング37によって弾性的に付勢される。この弾性的な付勢作用は、カム・ディスク26と協働し、それにより、上側ニッパ22がスプリング37の圧縮力に抗してカム・ディスク26(図3参照)により偏向される様になる。下側ニッパ23はその一端の領域において例えば圧縮スプリングであるスプリング38により弾性的に付勢されることから、下側ニッパ23は矢印DおよびEの方向に移動可能である。その結果、上側ニッパ22を閉じる際に下側ニッパ23における圧力衝撃は弾性的に緩衝され、繊維束303の振動、摩耗および劣化は相当に減少されるようになる。参照番号40および41は固定軸受を表し、該軸受上にはスプリング37および38の各々の一端が支持される。
【0023】
第1挟持デバイス18の上側ニッパ19および下側ニッパ20は、第2挟持デバイス21について図11に示された様式に対応する様式で弾性的に付勢され得る。
【0024】
図12(a)乃至図12(d)はロータ・コーミング機械2(ツー・ロータ式コーミング機械)の場合における繊維選択の動作シーケンスを概略形態で示しており、これら図面は相次ぐ時系列順にて以下の段階を示している:第1挟持デバイス18による、送給されたラップ16の挟持(図12(a))、第1ローラ12の回転方向12aにおける繊維タフト301の摘出(図12(b))、繊維タフト302が挟持されている上記挟持デバイスを開くことによるローラ12からローラ13への繊維タフト302の移送、および、コーミング要素31への推進係合による繊維タフト303のコーミング。
【0025】
図13に依れば、たとえばマイクロプロセッサを備えたマイクロコンピュータなどの電子的制御/調整デバイス42(機械およびシステムの制御手段)が配備されている。電子的制御/調整デバイス42には、特に、ロータ・コーミング機械2のローラ10、12、13、14、および、周回するカード頂部アセンブリ15(案内ローラ15a)のための電気モータなどの駆動デバイス43、44、45、46、47が接続されている。参照番号48は入力デバイス48を表し、参照番号49は表示デバイス49を表している。好適には、コーミング前処理機1、牽伸システム50、コンベア・ベルト51と、スライバ投入デバイス3とのための駆動デバイスも接続される(不図示)。
【0026】
ローラ12および13が共通ギヤにより駆動される限りにおいて、該共通ギヤのための駆動モータは制御/調整デバイス42に接続される。
【0027】
たとえば、上記送給ローラに対する円周速度は約0.2〜1.0m/秒であり、第1ローラ12に対しては約2.0〜6.0m/秒、第2ローラ13に対しては約2.0〜6.0m/秒、上記ドッファに対しては約0.4〜1.5m/秒、および、上記周回するカード頂部アセンブリに対しては約1.5〜4.5m/秒である。第1ローラ12および第2ローラ13の直径は、たとえば約0.3m〜0.8mである。
【0028】
本発明に係る装置の動作モードおよび動作シーケンスは以下の通りである。
【0029】
ラップ調製:
複数本のスライバが組み合わされることでラップ16が形成され、一体的に牽伸される。複数枚のラップ16は、相互に重ねて載置されることで二重化され得る。結果的に形成されたラップ16は、ロータ・コーミング機械2の送給要素10内に直接的に導入される。材料の流れは、巻回ラップを形成することにより中断されることはない。
【0030】
送給:
フラット・コーミング機械と異なり、上流のラップ16はコンベア要素により連続的に送給される。送給される量は、第1ロータ12(旋回ロータ)のニッパ18(反転ニッパ)の2度の閉じ時点の間において搬送されるラップ16の長さにより決定される。
【0031】
挟持1:
ラップ16から外方に突出していて整列された繊維タフトは、第1ロータ12(旋回ロータ)の挟持ニッパ18(反転ニッパ)により挟持される。第1ロータ12の挟持デバイス18は、摘出機能を前提とする。
【0032】
摘出:
反転ニッパ18が配置された旋回ロータ12の回転の結果として、挟持された繊維タフトは送給されたラップから摘出されるが、反転ニッパ8により挟持されないラップ16における繊維は保持される様に、ラップ16に作用する保持力が必要とされる。上記保持力は、送給手段のコンベア要素により、または、送給トレイもしくは頂部コームの如き付加的手段により付与される。上記保持力を生成する上記要素は、頂部コームの機能を前提とする。
【0033】
挟持2:
繊維タフトは整列されると共に、第2ロータ13(コーミング・ロータ)の挟持デバイス21(コーミング・ニッパ)へと移送される。コーミング・デバイス21が閉じる時点における上記反転ニッパの挟持線と上記コーミング・ニッパの挟持線との間の距離により、上記隔たりが決定される。
【0034】
コーミング:
コーミング・ニッパ21から外方に突出する繊維タフトは、挟持されていない繊維であってコーミングにより排除される繊維を包含する。
【0035】
継ぎ合わせ(Piecing):
梳き取り処理された繊維タフト303は、取出しローラ14上に載置される。吸引により作用されていて空気透過性である取出しローラ14の表面によって、繊維タフトは、取出しローラ14上に載置されて緊張延伸される。各繊維タフトは相互に重ねて載置され、屋根瓦のように重なり合い、繊維部分のウェブ304を形成する。
【0036】
ウェブ取り外しおよびコーマ・スライバの形成:
ウェブ17は、吸引により影響されない取出しローラ14上の箇所において該取出しローラ14から取り外されると共に、ファネル34内へと案内される。
【0037】
コーマ・スライバ処置:
結果的に形成されたコーマ・スライバは二重化かつ牽伸されて(牽伸システム50)、次に、たとえば巻取器3aによりケンス3b内に投入される。
【0038】
図14は、7台のコーミング前処理デバイス11〜17を備える配置構成を示し、夫々の場合において4列の繊維スライバ用ケンス5a、5bは供給軸架41〜47を有する(図1参照)。各供給軸架41〜47の下流には2つの牽伸システム6a1〜6a7および6b1〜6b7を備える牽伸システム・デバイスが配置され、該2つの牽伸システム6a1〜6a7および6b1〜6b7を備える各牽伸システム・デバイスの下流には、ラップ161〜167が直接的かつ連続的に送給されるロータ・コーミング機械21〜27が配置される。各ロータ・コーミング機械21〜27の下流には、スライバ投入デバイス31〜37が配置される。
【0039】
図8において参照番号は63は回転清浄化ローラを表し、該回転清浄化ローラは、梳き取られた繊維、ネップ(nep)、塵埃などの構成要素をコーミング要素31から解(ほぐ)すと共に、それらを収集/抽出デバイス56へと推進する。図9において各コーミング・ローラは同様に、抽出デバイス66を備えた清浄化ローラ65を備えている。
【0040】
本発明に係るロータ・コーミング機械2を用いると、たとえば3000〜5000ニップ/分などの、2000を超えるニップ/分が達成される。
【0041】
図15に依れば、挟持デバイス19、20および22、23を備えていて回転可能に取付けられたローラ12および13は、吸引チャネル52および56(吸引開口)を夫々付加的に備えている。供給デバイス8とローラ12との間における吐出領域およびローラ12および13の間における吐出領域において、吸引チャネル52、56は、搬送されつつある繊維の整列および移動に影響する。その様にして、供給デバイス8からの繊維材料を第1ローラ12上へと取り込むと共に第2ローラ13へと吐出するための時間は相当に減少され、それにより、ニップ速度は高められるようになる。吸引開口52、56はローラ12および13内に夫々配置されると共に、該ローラと共に回転する。各挟持デバイス19、20および22、23(ニッパ・デバイス)に対しては、少なくとも一個の吸引開口が関連付けられる。吸引開口52、56は各々、把持要素(上側ニッパ)と対向要素(下側ニッパ)との間に配置される。ロータ12、13の内部には、吸引開口52、56における吸引流により夫々生成された過小圧力領域53〜55および57〜59が在る。過小圧力は、流れ生成機に接続することにより生成され得る。個々の吸引開口52、56における吸引流は、該吸引流がローラ円周部上における特定の選択的角度位置においてのみ適用される様に、過小圧力領域と吸引開口との間において切換えられ得る。上記切換えの目的で、対応する角度位置において開口57および59を夫々備えたバルブもしくはバルブ管54、58が使用され得る。上記把持要素(上側ニッパ)の移動によって、吸引流の解除も達成され得る。更に、対応する角度位置においてのみ過小圧力の領域を配置できる。
【0042】
さらに、供給デバイス8の領域および/または各ローラ間の移送の領域においては、送風流が提供され得る。送風流の供給源(送風ノズル39)が送給ローラ10の内側に配置されると共に、該供給源は、上記供給デバイスの空気透過性表面または空気通路の開口を通じて、上記第1ローラの方向において外側に向かう効果を有する。さらに、供給デバイス8の領域において、送出される空気流を生成する上記要素は、該供給デバイス8の直下または直上において固定的に配置され得る。ローラ12、13間の移送の領域において、送出空気流源は、各ニッパ・デバイスの直下もしくは直上にて第1ローラ12の周縁部に配置され得る。送出空気を生成するために、圧縮空気ノズルまたは空気ブレードを使用してもよい。
【0043】
吸引流Bは好適には、案内だけでなく、供給デバイス8の領域において、ラップと、摘出されるべきタフトとの間の分離プロセスにも影響して、そのようなプロセスを短縮化し得る。
【0044】
付加的な空気案内要素60および側方篩61、62を配置した結果、上記流れの方向は影響され、各ロータにより回転して巻き込まれた空気が分離され得る。その様にして、設定に対する時間を更に短縮化できる。特に、ラップ上において第1ロータ12と供給デバイス8との間における篩要素、および、上記ローラの各側における篩要素は、有効であることが判明している。
【0045】
梳き取り処理された繊維部分303は、第2ローラ13から継ぎ合わせローラ14上へと通過する。
【0046】
本発明に係る上記ロータ・コーミング機械の使用に際しては、コーミングされるべき繊維材料の機械的コーミングが達成され、すなわち、コーミングのために機械的手段が用いられる。コーミングされるべき繊維材料の空気的コーミングは無く、すなわち、たとえば吸引および/または送出される空気流などの空気流は使用されない。
【0047】
本発明に係る上記ロータ・コーミング機械においては、中断されることなしに迅速に回転するローラであって挟持デバイスを有するというローラが存在する。中断を以て回転するローラ、段階的に回転するローラ、または、静止状態と回転状態との間において交互的に回転するローラは使用されない。
【図面の簡単な説明】
【0048】
【図1】コーミング前処理デバイスと、ロータ・コーミング機械と、スライバ投入デバイスとを備えていて繊維材料をコーミングするデバイスの概略的斜視図である。
【図2】2個のローラを有する本発明に係るロータ・コーミング機械の概略的側面図である。
【図3】2個のカム・ディスクを有する図2に係るロータ・コーミング機械の斜視図である。
【図4】供給手段としての頂部コーム・ローラを示す図である。
【図5】供給手段としての針布装着ローラを示す図である。
【図6】(a)供給手段としての二重ベルト・デバイスを示す図である。(b)供給手段としての二重ベルト・デバイスを示す他の図である。
【図7】(a)上方からの頂部コームを有する供給手段としての2個の送給ローラを示す図である。(b)下方からの頂部コームを有する供給手段としての2個の送給ローラを示す図である。
【図8】挟持デバイスと、コーミング要素のための回転頂部デバイスとを有する第2ローラ(コーミング・ローラ)の側面図である。
【図9】挟持デバイスと、コーミング要素としての円形コーム(コーム・ローラ)とを有する第2ローラ(コーミング・ローラ)の側面図である。
【図10】(a)第2ローラ(コーミング・ロータ)と、逆方向継ぎ合わせのための取出しローラとを示す図である。(b)第2ローラ(コーミング・ロータ)と、同一方向継ぎ合わせのための取出しローラとを示す図である。
【図11】スプリング負荷された上側ニッパ(把持要素)とスプリング負荷された下側ニッパ(対向要素)とを備える挟持デバイスの概略図である。
【図12】(a)〜(d)ツー・ロータ(two rotor)式コーミング機械の場合における繊維選択の動作シーケンスを概略形態で示す図である。
【図13】紡績用前処理機、ロータ紡機およびスライバ投入デバイスに対する電子的制御/調整デバイスを示すブロック回路図である。
【図14】7台のコーミング前処理機および7台のロータ・コーミング機械から成る配置構成の概略的平面図である。
【図15】複数個の吸引開口を含むロータ・コーミング機械の第1および第2ローラの概略的側面図である。
【符号の説明】
【0049】
1 コーミング前処理機
2、21〜27 ロータ・コーミング機械
3 スライバ投入デバイス
3a 巻取器
3b ケンス
4a、4b 送給テーブル
5a、5b 繊維スライバ用ケンス
6a、6b 牽伸システム
7 テーブル
8 供給デバイス
9 取出しデバイス
10 送給ローラ
12、13 ローラ
11 送給トレイ
15 頂部コーミング・アセンブリ
16、161〜167 繊維ラップ
18、19、20、21 挟持デバイス
22 上側ニッパ
23 下側ニッパ
27a、27b 無限回転ベルト
28a、28b 送給ローラ対
301〜304 繊維スライバ
31 コーミング要素
32 ローラ
33 篩要素
34 ファネル
42 電子的制御/調整デバイス
50 牽伸システム
51 コンベア
52 吸引チャネル
53〜55、57〜59 過小圧力領域
54、58 バルブ管
65 清浄化ローラ
66 抽出デバイス
【特許請求の範囲】
【請求項1】
織物繊維から成る少なくとも一本の繊維スライバを分類もしくは選択し、特にコーミングする装置であって、該装置は、異なる送給器箇所から吐出された所定本数の繊維スライバを、繊維ラップを吐出する少なくとも一台の牽伸システム・ユニットの送給ローラ対に供給する供給デバイスと、上記牽伸システム・ユニットの下流に配置されたコーミング・デバイスとを有する、という装置において、
上記コーミング・デバイスはロータ・コーミング機械(2;21〜27)であると共に、上記繊維ラップ(16;161〜167)は直接的に且つ中断されることなしに上記ロータ・コーミング機械(2;21〜27)へと送給されるべく配置されており、
中断されることなしに迅速に回転すべく回転可能に取付けられた少なくとも一個のローラ(12、13)が、供給手段(8;10、11、27a、27b、28a、28b)の下流に配置されることを特徴とする、装置。
【請求項2】
前記送給器箇所は紡績用ケンスであることを特徴とする、請求項1記載の装置。
【請求項3】
前記送給器箇所はケンス無し繊維スライバ・パッケージであることを特徴とする、請求項1または2に記載の装置。
【請求項4】
少なくとも2台の牽伸システム・ユニットが存在することを特徴とする、請求項1乃至3のいずれか一項に記載の装置。
【請求項5】
スライバ二重化デバイスが、前記牽伸システムの下流に配置されることを特徴とする、請求項1乃至4のいずれか一項に記載の装置。
【請求項6】
前記繊維ラップはラップ形成デバイスから直接的に送給されるべく配置されることを特徴とする、請求項1乃至5のいずれか一項に記載の装置。
【請求項7】
前記繊維ラップは前記少なくとも一台の牽伸システム・ユニットから直接的に送給されるべく配置されることを特徴とする、請求項1乃至6のいずれか一項に記載の装置。
【請求項8】
前記繊維ラップは前記スライバ二重化デバイスから直接的に送給されるべく配置されることを特徴とする、請求項1乃至7のいずれか一項に記載の装置。
【請求項9】
前記繊維ラップは巻回ラップを形成することなしに送給されるべく配置されることを特徴とする、請求項1乃至8のいずれか一項に記載の装置。
【請求項10】
前記繊維ラップは巻回ラップを搬送することなしに送給されるべく配置されることを特徴とする、請求項1乃至9のいずれか一項に記載の装置。
【請求項11】
前記繊維ラップは巻回ラップを位置決めすることなしに送給されるべく配置されることを特徴とする、請求項1乃至10のいずれか一項に記載の装置。
【請求項12】
前記繊維ラップは連続的に送給されるべく配置されることを特徴とする、請求項1乃至11のいずれか一項に記載の装置。
【請求項13】
繊維スライバ(16;161〜163)(ラップ)が前記ロータ・コーミング機械(2;21〜27)に供給され、
上記ロータ・コーミング機械においては、繊維スライバ(301〜303)の自由端部から所定距離にて該繊維スライバを挟持する挟持デバイス(18、19、20;21、22、23)が配備され、
たとえば短繊維、ネップ、塵埃の如き非挟持構成要素をゆるめて上記自由端部から除去するために、上記繊維スライバ(301〜303)の挟持部位から上記自由端部までコーミング作用を生成する生成手段(15、31、32)が存在し、
回転可能に取付けられた少なくとも一個のローラ(12、13)が前記供給手段(8;10、11、27a、27b、28a、28b)の下流に配置されており、該ローラは、当該ローラ(12、13)の周縁部の回りに離間して分布された上記繊維スライバ(16;301〜303)用挟持デバイス(18、19、20;21、22、23)を備えており、
コーミング作用を生成する上記生成手段(15、31、32)(コーミング要素)は上記ローラ(13)の周縁部に関係付けられることを特徴とする、請求項1乃至12のいずれか一項に記載の装置。
【請求項14】
前記挟持デバイスは、コーミング作用を生成する前記生成手段(コーミング要素)と協働することを特徴とする、請求項1乃至13のいずれか一項に記載の装置。
【請求項15】
コーミング作用を生成する前記生成手段(コーミング要素)は、前記ローラの前記周縁部と対向して配置されることを特徴とする、請求項1乃至14のいずれか一項に記載の装置。
【請求項16】
コーミング作用を生成する前記生成手段(コーミング要素)と前記挟持デバイスとの間にはスペースが在ることを特徴とする、請求項1乃至15のいずれか一項に記載の装置。
【請求項17】
コーミング作用を生成する前記手段(コーミング要素)と前記ローラの前記周縁部との間にはスペースが在ることを特徴とする、請求項1乃至16のいずれか一項に記載の装置。
【請求項18】
梳き取りの間において、梳き取り処理されつつある繊維スライバは、コーミング作用を生成する生成手段(コーミング要素)および挟持デバイスに係合することを特徴とする、請求項1乃至17のいずれか一項に記載の装置。
【請求項19】
前記供給手段は頂部コーム・ローラを備えることを特徴とする、請求項1乃至18のいずれか一項に記載の装置。
【請求項20】
前記供給手段は、針布、ニードルなどを有するローラを備えることを特徴とする、請求項1または19に記載の装置。
【請求項21】
前記供給手段はコーム循環要素を備えることを特徴とする、請求項1乃至20のいずれか一項に記載の装置。
【請求項22】
前記供給手段は2本の無限循環ベルトを備えることを特徴とする、請求項1乃至21のいずれか一項に記載の装置。
【請求項23】
前記供給手段は少なくとも2個の送給ローラを備えることを特徴とする、請求項1乃至22のいずれか一項に記載の装置。
【請求項24】
前記供給手段は低速送給ローラおよび送給テーブルを備えることを特徴とする、請求項1乃至23のいずれか一項に記載の装置。
【請求項25】
前記供給手段は牽伸システムから形成されることを特徴とする、請求項1乃至24のいずれか一項に記載の装置。
【請求項26】
前記供給手段と前記回転可能ローラとの間には頂部コームが配置されることを特徴とする、請求項1乃至25のいずれか一項に記載の装置。
【請求項27】
前記供給手段は固定されることを特徴とする、請求項1乃至26のいずれか一項に記載の装置。
【請求項28】
前記供給手段は前記繊維ラップを連続的に搬送することを特徴とする、請求項1乃至27のいずれか一項に記載の装置。
【請求項29】
前記供給手段により吐出された繊維スライバを段階的に個別の繊維タフトへと分離する分離手段が配備されることを特徴とする、請求項1乃至28のいずれか一項に記載の装置。
【請求項30】
個別の繊維タフトを生成する前記手段は回転可能に取付けられた第1ローラを備えることを特徴とする、請求項1乃至29のいずれか一項に記載の装置。
【請求項31】
前記第1ローラは、該第1ローラの周縁部の回りにおいて離間して分布された第1挟持デバイスを備えることを特徴とする、請求項1乃至30のいずれか一項に記載の装置。
【請求項32】
前記第1挟持デバイスは各々、ニッパ・デバイスを有することを特徴とする、請求項1乃至31のいずれか一項に記載の装置。
【請求項33】
前記繊維タフトを、後続の繊維分類デバイス(コーミング・デバイス)へと移送する手段が在ることを特徴とする、請求項1乃至32のいずれか一項に記載の装置。
【請求項34】
前記第1ローラは、前記繊維タフトを後続の繊維分類デバイス(コーミング・デバイス)へと移送するために配備されることを特徴とする、請求項1乃至33のいずれか一項に記載の装置。
【請求項35】
前記繊維タフトを移送するときに第1挟持要素と第2挟持デバイスとが協働することを特徴とする、請求項1乃至34のいずれか一項に記載の装置。
【請求項36】
前記第1ローラに対して軸心的に平行に回転可能に取付けられた第2ローラが関係付けられることを特徴とする、請求項1乃至35のいずれか一項に記載の装置。
【請求項37】
前記第1ローラおよび前記第2ローラは相互に逆方向に回転することを特徴とする、請求項1乃至36のいずれか一項に記載の装置。
【請求項38】
前記第2ローラは、該ローラの周縁部の回りに離間して分布された第2挟持デバイスを備えることを特徴とする、請求項1乃至37のいずれか一項に記載の装置。
【請求項39】
前記第2挟持デバイスは各々、ニッパ・デバイスを有することを特徴とする、請求項1乃至38のいずれか一項に記載の装置。
【請求項40】
前記ニッパ・デバイスは、回転可能または変位可能に取付けられた把持要素(上側ニッパ)を有することを特徴とする、請求項1乃至39のいずれか一項に記載の装置。
【請求項41】
前記ニッパ・デバイスは、固定的に取付けられた対向要素(下側ニッパ)を有することを特徴とする、請求項1乃至40のいずれか一項に記載の装置。
【請求項42】
前記第2挟持デバイスは、コーミング作用を生成する前記生成手段と協働することを特徴とする、請求項1乃至41のいずれか一項に記載の装置。
【請求項43】
コーミング作用を生成する前記生成手段は、前記第2ローラの外周縁から所定距離に配置されることを特徴とする、請求項1乃至42のいずれか一項に記載の装置。
【請求項44】
前記第2ローラは取出しデバイスに関係付けられることを特徴とする、請求項1乃至43のいずれか一項に記載の装置。
【請求項45】
前記第2ローラ(コーミング・ロータ)に対して軸心的に平行に、回転可能に取付けられた取出しローラが在ることを特徴とする、請求項1乃至44のいずれか一項に記載の装置。
【請求項46】
前記取出しローラの下流には牽伸デバイスが配置されることを特徴とする、請求項1乃至45のいずれか一項に記載の装置。
【請求項47】
前記取出しローラの下流にはスライバ投入デバイスが配置されることを特徴とする、請求項1乃至46のいずれか一項に記載の装置。
【請求項48】
前記スライバ投入デバイスは巻取器とケンスとを備えることを特徴とする、請求項1乃至47のいずれか一項に記載の装置。
【請求項49】
前記スライバ投入デバイスは、巻取器と、ケンス無しスライバ・パッケージとを備えることを特徴とする、請求項1乃至48のいずれか一項に記載の装置。
【請求項50】
2台以上のロータ・コーミング機械が存在することを特徴とする、請求項1乃至49のいずれか一項に記載の装置。
【請求項51】
各ロータ・コーミング機械の下流には牽伸システムが配置されることを特徴とする、請求項1乃至50のいずれか一項に記載の装置。
【請求項52】
前記コーミング要素(31)は、たとえば回転清浄化ローラ(63)などの清浄化デバイスに関係付けられることを特徴とする、請求項1乃至51のいずれか一項に記載の装置。
【請求項53】
前記清浄化ローラ(63)は抽出デバイス(64)に関係付けられることを特徴とする、請求項1乃至52のいずれか一項に記載の装置。
【請求項54】
前記コーミング要素(32)は、たとえば回転清浄化ローラ(65)などの清浄化デバイスに関係付けられることを特徴とする、請求項1乃至53のいずれか一項に記載の装置。
【請求項55】
前記清浄化ローラ(65)は抽出デバイス(66)に関係付けられることを特徴とする、請求項1乃至54のいずれか一項に記載の装置。
【請求項56】
前記コーミング・デバイスはロータ・コーミング機械(2;21〜27)であり、且つ、前記繊維ラップ(16;161〜167)は上記ロータ・コーミング機械(2;21〜27)に直接的に送給されることを特徴とする、請求項1乃至55のいずれか一項に記載の装置。
【請求項57】
供給された繊維スライバ(301、302)の吸引のために、少なくとも一台の吸引デバイス(52、53、54、55;56、57、58、59)が、前記供給手段(8;10、11、27a、27b、28a、28b)から前記第1ローラ(12)まで上記繊維スライバ(301)を取り込む領域において、および/または、上記第1ローラ(12)から前記第2ローラ(13)まで上記繊維材料(302)を取り込む領域において、前記挟持デバイスに関係付けられることを特徴とする、請求項1乃至56のいずれか一項に記載の装置。
【請求項58】
前記供給デバイスから前記第1ローラまで前記繊維スライバを吐出する領域において、および/または、上記第1ローラから前記第2ローラまで前記繊維材料を吐出する領域において、少なくとも一個の送風開口(39)が配備されることを特徴とする、請求項1乃至57のいずれか一項に記載の装置。
【請求項1】
織物繊維から成る少なくとも一本の繊維スライバを分類もしくは選択し、特にコーミングする装置であって、該装置は、異なる送給器箇所から吐出された所定本数の繊維スライバを、繊維ラップを吐出する少なくとも一台の牽伸システム・ユニットの送給ローラ対に供給する供給デバイスと、上記牽伸システム・ユニットの下流に配置されたコーミング・デバイスとを有する、という装置において、
上記コーミング・デバイスはロータ・コーミング機械(2;21〜27)であると共に、上記繊維ラップ(16;161〜167)は直接的に且つ中断されることなしに上記ロータ・コーミング機械(2;21〜27)へと送給されるべく配置されており、
中断されることなしに迅速に回転すべく回転可能に取付けられた少なくとも一個のローラ(12、13)が、供給手段(8;10、11、27a、27b、28a、28b)の下流に配置されることを特徴とする、装置。
【請求項2】
前記送給器箇所は紡績用ケンスであることを特徴とする、請求項1記載の装置。
【請求項3】
前記送給器箇所はケンス無し繊維スライバ・パッケージであることを特徴とする、請求項1または2に記載の装置。
【請求項4】
少なくとも2台の牽伸システム・ユニットが存在することを特徴とする、請求項1乃至3のいずれか一項に記載の装置。
【請求項5】
スライバ二重化デバイスが、前記牽伸システムの下流に配置されることを特徴とする、請求項1乃至4のいずれか一項に記載の装置。
【請求項6】
前記繊維ラップはラップ形成デバイスから直接的に送給されるべく配置されることを特徴とする、請求項1乃至5のいずれか一項に記載の装置。
【請求項7】
前記繊維ラップは前記少なくとも一台の牽伸システム・ユニットから直接的に送給されるべく配置されることを特徴とする、請求項1乃至6のいずれか一項に記載の装置。
【請求項8】
前記繊維ラップは前記スライバ二重化デバイスから直接的に送給されるべく配置されることを特徴とする、請求項1乃至7のいずれか一項に記載の装置。
【請求項9】
前記繊維ラップは巻回ラップを形成することなしに送給されるべく配置されることを特徴とする、請求項1乃至8のいずれか一項に記載の装置。
【請求項10】
前記繊維ラップは巻回ラップを搬送することなしに送給されるべく配置されることを特徴とする、請求項1乃至9のいずれか一項に記載の装置。
【請求項11】
前記繊維ラップは巻回ラップを位置決めすることなしに送給されるべく配置されることを特徴とする、請求項1乃至10のいずれか一項に記載の装置。
【請求項12】
前記繊維ラップは連続的に送給されるべく配置されることを特徴とする、請求項1乃至11のいずれか一項に記載の装置。
【請求項13】
繊維スライバ(16;161〜163)(ラップ)が前記ロータ・コーミング機械(2;21〜27)に供給され、
上記ロータ・コーミング機械においては、繊維スライバ(301〜303)の自由端部から所定距離にて該繊維スライバを挟持する挟持デバイス(18、19、20;21、22、23)が配備され、
たとえば短繊維、ネップ、塵埃の如き非挟持構成要素をゆるめて上記自由端部から除去するために、上記繊維スライバ(301〜303)の挟持部位から上記自由端部までコーミング作用を生成する生成手段(15、31、32)が存在し、
回転可能に取付けられた少なくとも一個のローラ(12、13)が前記供給手段(8;10、11、27a、27b、28a、28b)の下流に配置されており、該ローラは、当該ローラ(12、13)の周縁部の回りに離間して分布された上記繊維スライバ(16;301〜303)用挟持デバイス(18、19、20;21、22、23)を備えており、
コーミング作用を生成する上記生成手段(15、31、32)(コーミング要素)は上記ローラ(13)の周縁部に関係付けられることを特徴とする、請求項1乃至12のいずれか一項に記載の装置。
【請求項14】
前記挟持デバイスは、コーミング作用を生成する前記生成手段(コーミング要素)と協働することを特徴とする、請求項1乃至13のいずれか一項に記載の装置。
【請求項15】
コーミング作用を生成する前記生成手段(コーミング要素)は、前記ローラの前記周縁部と対向して配置されることを特徴とする、請求項1乃至14のいずれか一項に記載の装置。
【請求項16】
コーミング作用を生成する前記生成手段(コーミング要素)と前記挟持デバイスとの間にはスペースが在ることを特徴とする、請求項1乃至15のいずれか一項に記載の装置。
【請求項17】
コーミング作用を生成する前記手段(コーミング要素)と前記ローラの前記周縁部との間にはスペースが在ることを特徴とする、請求項1乃至16のいずれか一項に記載の装置。
【請求項18】
梳き取りの間において、梳き取り処理されつつある繊維スライバは、コーミング作用を生成する生成手段(コーミング要素)および挟持デバイスに係合することを特徴とする、請求項1乃至17のいずれか一項に記載の装置。
【請求項19】
前記供給手段は頂部コーム・ローラを備えることを特徴とする、請求項1乃至18のいずれか一項に記載の装置。
【請求項20】
前記供給手段は、針布、ニードルなどを有するローラを備えることを特徴とする、請求項1または19に記載の装置。
【請求項21】
前記供給手段はコーム循環要素を備えることを特徴とする、請求項1乃至20のいずれか一項に記載の装置。
【請求項22】
前記供給手段は2本の無限循環ベルトを備えることを特徴とする、請求項1乃至21のいずれか一項に記載の装置。
【請求項23】
前記供給手段は少なくとも2個の送給ローラを備えることを特徴とする、請求項1乃至22のいずれか一項に記載の装置。
【請求項24】
前記供給手段は低速送給ローラおよび送給テーブルを備えることを特徴とする、請求項1乃至23のいずれか一項に記載の装置。
【請求項25】
前記供給手段は牽伸システムから形成されることを特徴とする、請求項1乃至24のいずれか一項に記載の装置。
【請求項26】
前記供給手段と前記回転可能ローラとの間には頂部コームが配置されることを特徴とする、請求項1乃至25のいずれか一項に記載の装置。
【請求項27】
前記供給手段は固定されることを特徴とする、請求項1乃至26のいずれか一項に記載の装置。
【請求項28】
前記供給手段は前記繊維ラップを連続的に搬送することを特徴とする、請求項1乃至27のいずれか一項に記載の装置。
【請求項29】
前記供給手段により吐出された繊維スライバを段階的に個別の繊維タフトへと分離する分離手段が配備されることを特徴とする、請求項1乃至28のいずれか一項に記載の装置。
【請求項30】
個別の繊維タフトを生成する前記手段は回転可能に取付けられた第1ローラを備えることを特徴とする、請求項1乃至29のいずれか一項に記載の装置。
【請求項31】
前記第1ローラは、該第1ローラの周縁部の回りにおいて離間して分布された第1挟持デバイスを備えることを特徴とする、請求項1乃至30のいずれか一項に記載の装置。
【請求項32】
前記第1挟持デバイスは各々、ニッパ・デバイスを有することを特徴とする、請求項1乃至31のいずれか一項に記載の装置。
【請求項33】
前記繊維タフトを、後続の繊維分類デバイス(コーミング・デバイス)へと移送する手段が在ることを特徴とする、請求項1乃至32のいずれか一項に記載の装置。
【請求項34】
前記第1ローラは、前記繊維タフトを後続の繊維分類デバイス(コーミング・デバイス)へと移送するために配備されることを特徴とする、請求項1乃至33のいずれか一項に記載の装置。
【請求項35】
前記繊維タフトを移送するときに第1挟持要素と第2挟持デバイスとが協働することを特徴とする、請求項1乃至34のいずれか一項に記載の装置。
【請求項36】
前記第1ローラに対して軸心的に平行に回転可能に取付けられた第2ローラが関係付けられることを特徴とする、請求項1乃至35のいずれか一項に記載の装置。
【請求項37】
前記第1ローラおよび前記第2ローラは相互に逆方向に回転することを特徴とする、請求項1乃至36のいずれか一項に記載の装置。
【請求項38】
前記第2ローラは、該ローラの周縁部の回りに離間して分布された第2挟持デバイスを備えることを特徴とする、請求項1乃至37のいずれか一項に記載の装置。
【請求項39】
前記第2挟持デバイスは各々、ニッパ・デバイスを有することを特徴とする、請求項1乃至38のいずれか一項に記載の装置。
【請求項40】
前記ニッパ・デバイスは、回転可能または変位可能に取付けられた把持要素(上側ニッパ)を有することを特徴とする、請求項1乃至39のいずれか一項に記載の装置。
【請求項41】
前記ニッパ・デバイスは、固定的に取付けられた対向要素(下側ニッパ)を有することを特徴とする、請求項1乃至40のいずれか一項に記載の装置。
【請求項42】
前記第2挟持デバイスは、コーミング作用を生成する前記生成手段と協働することを特徴とする、請求項1乃至41のいずれか一項に記載の装置。
【請求項43】
コーミング作用を生成する前記生成手段は、前記第2ローラの外周縁から所定距離に配置されることを特徴とする、請求項1乃至42のいずれか一項に記載の装置。
【請求項44】
前記第2ローラは取出しデバイスに関係付けられることを特徴とする、請求項1乃至43のいずれか一項に記載の装置。
【請求項45】
前記第2ローラ(コーミング・ロータ)に対して軸心的に平行に、回転可能に取付けられた取出しローラが在ることを特徴とする、請求項1乃至44のいずれか一項に記載の装置。
【請求項46】
前記取出しローラの下流には牽伸デバイスが配置されることを特徴とする、請求項1乃至45のいずれか一項に記載の装置。
【請求項47】
前記取出しローラの下流にはスライバ投入デバイスが配置されることを特徴とする、請求項1乃至46のいずれか一項に記載の装置。
【請求項48】
前記スライバ投入デバイスは巻取器とケンスとを備えることを特徴とする、請求項1乃至47のいずれか一項に記載の装置。
【請求項49】
前記スライバ投入デバイスは、巻取器と、ケンス無しスライバ・パッケージとを備えることを特徴とする、請求項1乃至48のいずれか一項に記載の装置。
【請求項50】
2台以上のロータ・コーミング機械が存在することを特徴とする、請求項1乃至49のいずれか一項に記載の装置。
【請求項51】
各ロータ・コーミング機械の下流には牽伸システムが配置されることを特徴とする、請求項1乃至50のいずれか一項に記載の装置。
【請求項52】
前記コーミング要素(31)は、たとえば回転清浄化ローラ(63)などの清浄化デバイスに関係付けられることを特徴とする、請求項1乃至51のいずれか一項に記載の装置。
【請求項53】
前記清浄化ローラ(63)は抽出デバイス(64)に関係付けられることを特徴とする、請求項1乃至52のいずれか一項に記載の装置。
【請求項54】
前記コーミング要素(32)は、たとえば回転清浄化ローラ(65)などの清浄化デバイスに関係付けられることを特徴とする、請求項1乃至53のいずれか一項に記載の装置。
【請求項55】
前記清浄化ローラ(65)は抽出デバイス(66)に関係付けられることを特徴とする、請求項1乃至54のいずれか一項に記載の装置。
【請求項56】
前記コーミング・デバイスはロータ・コーミング機械(2;21〜27)であり、且つ、前記繊維ラップ(16;161〜167)は上記ロータ・コーミング機械(2;21〜27)に直接的に送給されることを特徴とする、請求項1乃至55のいずれか一項に記載の装置。
【請求項57】
供給された繊維スライバ(301、302)の吸引のために、少なくとも一台の吸引デバイス(52、53、54、55;56、57、58、59)が、前記供給手段(8;10、11、27a、27b、28a、28b)から前記第1ローラ(12)まで上記繊維スライバ(301)を取り込む領域において、および/または、上記第1ローラ(12)から前記第2ローラ(13)まで上記繊維材料(302)を取り込む領域において、前記挟持デバイスに関係付けられることを特徴とする、請求項1乃至56のいずれか一項に記載の装置。
【請求項58】
前記供給デバイスから前記第1ローラまで前記繊維スライバを吐出する領域において、および/または、上記第1ローラから前記第2ローラまで前記繊維材料を吐出する領域において、少なくとも一個の送風開口(39)が配備されることを特徴とする、請求項1乃至57のいずれか一項に記載の装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2008−101318(P2008−101318A)
【公開日】平成20年5月1日(2008.5.1)
【国際特許分類】
【出願番号】特願2007−272781(P2007−272781)
【出願日】平成19年10月19日(2007.10.19)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
【公開日】平成20年5月1日(2008.5.1)
【国際特許分類】
【出願日】平成19年10月19日(2007.10.19)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
[ Back to top ]