
羽ばたき浮上移動装置
【課題】ユーザが容易に交換することができる羽部を備えた羽ばたき浮上移動装置を提供する。
【解決手段】アクチュエータ2は、上部超音波モータ21および下部超音波モータ22を備えている。上部超音波モータ21は、上部プレート231を駆動する。下部超音波モータ22は、下部プレート232を駆動する。上部プレート231には、羽固定プレート234が回転可能に接続されている。下部プレート232および羽固定プレート234のそれぞれには、中間プレート233が回転可能に接続されている。羽部は、固定プレート234に取り付け可能に構成されているとともに、アクチュエータ2から取り外し可能に構成されている。
【解決手段】アクチュエータ2は、上部超音波モータ21および下部超音波モータ22を備えている。上部超音波モータ21は、上部プレート231を駆動する。下部超音波モータ22は、下部プレート232を駆動する。上部プレート231には、羽固定プレート234が回転可能に接続されている。下部プレート232および羽固定プレート234のそれぞれには、中間プレート233が回転可能に接続されている。羽部は、固定プレート234に取り付け可能に構成されているとともに、アクチュエータ2から取り外し可能に構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、羽ばたき浮上移動装置の羽部に関するものである。
【背景技術】
【0002】
羽ばたき浮上移動装置は、従来の固定翼を有する飛行機およびヘリコプターよりも機動性において優れている。そのため、近年、羽ばたき飛行するロボットの工学的な実現を目指した研究が盛んになっている。特に、トンボおよびハエなどの昆虫が行っているようなホバリング(停空飛翔)の工学的な応用が期待されている。昆虫に見られるような高い機動力を羽ばたき浮上移動装置に発揮させるためには、左羽部および右羽部のそれぞれを少なくとも2自由度で駆動することが必要である。たとえば、特開2006−69482号公報においては、前述の2自由度の運動を、プレート、薄いフィルムによって構成されたヒンジ(蝶番)、および2つの回転部材(これらは、以後、「上部ロータ」および「下部ロータ」と呼ばれる。)を用いて、羽部の根元部を2自由度で駆動する方法が開示されている。
【特許文献1】特開2006−69482号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記の従来の羽ばたき浮上移動装置においては、羽ばたき浮上移動装置のユーザ自身が損傷した羽部を新たな羽部へ交換することが困難であるという問題がある。以下、その問題が具体的に説明される。
【0004】
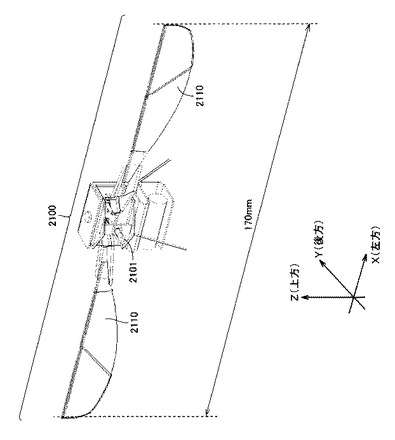
図12は、特開2006−69482号公報に開示された羽ばたき浮上移動装置の外観図である。図12に示されるように、左および右の羽部2110は、筐体2101から外方に突出している。それにより、羽部2110は羽ばたき飛行中に他の物体に衝突し易い。また、羽部2110は、極めて軽量であることを必要とするため、極めて細い枠およびフィルムによって形成されている。そのため、羽部2110は、外部からの衝撃により破損し易い。その結果、羽部2110の破損が頻繁に生じてしまう。したがって、ユーザによるメンテナンスの容易性の観点から、羽部を容易に交換することができる羽ばたき浮上移動装置が求められている。
【0005】
また、羽部2110は、それに隣接するアクチュエータを構成するプレート部にフィルムを介して接続されている。羽部2110の交換のためには、破損した羽部2110をフィルムから取り外すこと、および、新たな羽部2110をフィルムに再度接着することが必要になる。
【0006】
しかしながら、羽部2110とプレート部との間隔が大きすぎると、アクチュエータの構成する機構の動作の精度が低下する。一方、逆に、羽部2110とプレート部との間隔が小さすぎると、羽部2110の根元部とプレート部とが接触してしまうため、アクチュエータを構成する機構が適正に動作することができない。したがって、羽部2110とプレートとの間隔は、アクチュエータを構成する機構の動作に悪影響を及ぼさない程度に設定されることが必要である。そのためには、高度な製作技術が要求される。
【0007】
また、前述の機構は、羽ばたき浮上移動装置の軽量化のために、極力小型化されている。そのため、羽部2110とプレート部との間隔は極めて小さい。したがって、羽ばたき浮上移動装置のユーザが羽部2110を交換すると、羽部2110とアクチュエータとの組み付け誤差に起因して羽ばたき浮上移動装置の性能に問題が生じることがある。
【0008】
以上から分かるように、従来の羽ばたき浮上移動装置によれば、現実的には、ユーザが破損した羽部2110を交換することができない。したがって、羽ばたき浮上移動装置の寿命は極めて短い。
【0009】
本発明は、上述の事情に鑑みなされたものであり、その目的は、ユーザが容易に交換することができる羽部を備えた羽ばたき浮上移動装置を提供することである。
【課題を解決するための手段】
【0010】
本発明の羽ばたき浮上移動装置は、羽ばたき運動する羽部と、羽部を駆動するアクチュエータと、アクチュエータを制御する制御部とを備えている。また、羽部は、アクチュエータに取り付け可能に構成されているとともに、アクチュエータから取り外し可能に構成されている。この構成によれば、羽部を容易に交換することができる。
【0011】
また、アクチュエータは、制御部により制御される第1モータと、第1モータから独立して制御部により制御される第2モータと、第1モータにより直接的に駆動される第1被駆動部と、第2モータにより直接的に駆動される第2被駆動部と、第1被駆動部に対して回転可能に接続された第1中間部と、第2被駆動部および第1中間部のそれぞれに対して回転可能に接続された第2中間部と含んでいてもよい。この場合、羽部は、第1中間部および第2中間部のうちのいずれか一方の中間部に取り付け可能に構成されているとともに、一方の中間部から取り外し可能に構成されていることが望ましい。また、制御部は、第1モータおよび第2モータに第1被駆動部および第2被駆動部を駆動させることにより、羽部がその根元部を中心軸とする往復回転運動およびその前縁部を中心軸とする捻り運動をするように、第1中間部および第2中間部の姿勢を変化させることが望ましい。この構成によれば、中間部への羽部の取り付けおよび中間部からの羽部の取り外しにより、羽部を容易に交換することができる。
【0012】
また、羽部は、その前縁部に沿って延びる折板構造を有しており、その折板構造が、羽部の一方の主表面側においてのみ突出していることが望ましい。この場合、一方の主表面は、羽部の両主表面のうちのアクチュエータに接触している主表面の裏側の主表面であることが望ましい。この構成によれば、羽部の折板構造とアクチュエータとが接触することがない。そのため、羽部の交換を容易にすることができる。
【0013】
また、羽部がアクチュエータに接着剤により固定されていることが望ましい。この構成によれば、アクチュエータに羽部を取り付けるための専用の構造を設ける必要がない。そのため、アクチュエータの重量の増加を抑制し、かつ、羽部の取り付け作業を複雑化させることを防止しながら、羽部を容易に交換することできる羽ばたき浮上移動装置を提供することができる。
【0014】
また、アクチェータが羽部のアクチュエータに対する位置を規定する位置決め用凸部を有しており、位置決め用凸部が折板構造によって形成される位置決め用溝に嵌まり込むことが望ましい。この構成によれば、羽部のアクチュエータに対する位置決めの正確さを容易に向上させることができる。
【0015】
また、位置決め用凸部が位置決め用溝に内接する形状を有していることが望ましい。この構成によれば、羽部のアクチュエータに対する位置決めの正確さを最大限に向上させることができる。
【0016】
また、アクチュエータが羽部の根元部が挿入されるポケット部を有していることが望ましい。この構成によれば、接着剤を用いることなく、羽部のアクチュエータに対する位置を固定することができる。
【0017】
また、アクチュエータが突出部を有し、羽部の根元部が、突出部が嵌め込まれる凹部または貫通孔を有していることが望ましい。この構成によれば、羽部の面内方向における羽部のアクチュエータに対する移動が突出部によって拘束される。
【0018】
また、アクチュエータが平面視においてU字を描く溝を有し、突出部がU字の内側の領域に設けられていることが望ましい。この構成によれば、U字の内側の領域が面外方向に容易に撓む。そのため、突出部をアクチュエータの主表面に向かう方向に押すことにより、凹部または貫通孔から容易に取り外すことができる。
【0019】
また、突出部が羽部の根元部側から羽部の先端側へ窪む溝状の凹みを有し、貫通孔の周辺の部分が前記溝状の凹みに嵌り込むことが望ましい。この構成によれば、羽部が羽ばたき運動中にアクチュエータから外れてしまうことが確実に防止される。
【0020】
また、U字を描く溝は、U字の下部が羽部の先端部に向かうように、かつ、U字の上部が羽部の根元部に向かうように設けられていることが望ましい。この構成によれば、羽部が羽ばたき運動しているときに、アクチュエータのうちのU字を描く溝の内側の領域に生じる力は、圧縮力ではなく、引っ張り力である。したがって、膜厚が小さい羽部であっても、アクチュエータのうちのU字を描く溝の内側の領域が座屈することが防止される。
【発明の効果】
【0021】
本発明によれば、羽ばたき浮上移動装置の羽部を容易に交換することが可能になる。
【発明を実施するための最良の形態】
【0022】
(実施の形態1)
以下、図1〜図6を用いて、本発明の実施の形態1の浮上移動装置が説明される。なお、本発明の目的は、羽ばたき浮上移動装置の羽部を容易に交換する手法を提供することである。そのため、羽ばたき浮上移動装置の各構成要素としては、その代表例のみが挙げられる。したがって、本発明の範囲は、以下に記載される代表例の構成要素に限定されない。
【0023】
(羽ばたき浮上移動装置の全体構成)
<全体構成>
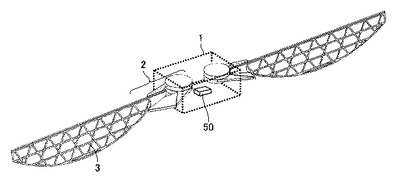
以下、図1を用いて、本発明の実施の形態の羽ばたき浮上移動装置の構成が説明される。
【0024】
羽ばたき浮上移動装置は、筐体1を備えている。筐体1にはアクチュエータ2が固定されている。アクチュエータ2には羽部3が取り付けられている。また、アクチュエータ2は、筐体1内に搭載された制御部50に格納された駆動回路およびプログラムからの指示によって駆動される。
【0025】
また、筐体1は左右対称である。また、アクチュエータ2および羽部3も、筐体1の対称面に対して鏡面対称に配置されている。本実施の形態の羽ばたき浮上移動装置は、一般的な羽ばたき浮上移動装置の構成と同様である。しかしながら、羽ばたき飛行の特性が損なわれない限り、本発明の羽ばたき装置の構成は、本実施の形態の羽ばたき装置の構成に限定されない。以下においては、左および右のアクチュエータおよび羽部のうちの一方の説明がなされ、左および右のアクチュエータおよび羽部のうちの他方の説明はなされない。また、実施の形態の羽ばたき浮上移動装置の駆動回路および筐体1の形状等は、本発明の羽ばたき浮上移動装置の一例であり、本発明の羽ばたき浮上移動装置の構造は、羽部の羽ばたき動作により流体中を飛行することができるものであれば、実施の形態の羽ばたき装置の構造に限定されない。
【0026】
<アクチュエータ>
次に、図2〜図4を用いてアクチュエータ2の構成が説明される。
【0027】
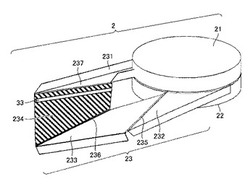
[アクチュエータの構成]
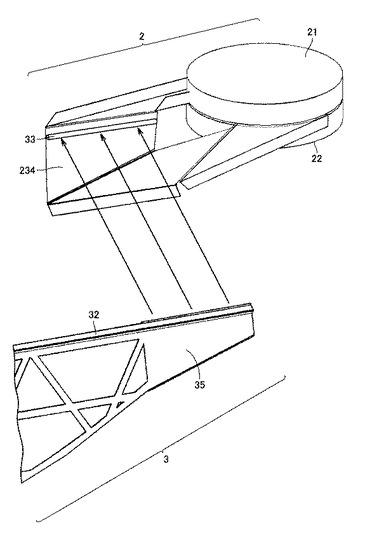
アクチュエータ2は、羽部3に接続される複合メカニカルリンク23を備えている。複合メカニカルリンク23は、上部超音波モータ21と下部超音波モータ22とにより駆動される。複合メカニカルリンク23は、本発明の第1被駆動部の一例の上部プレート231と、本発明の第2被駆動部の一例の下部プレート232とを備えている。また、複合メカニカルリンク23は、本発明の第1中間部の一例の中間プレート233と、本発明の第2中間部の一例の羽固定プレート234とを備えている。上部プレート231は、上部超音波モータ21に直接固定されている。下部プレート232は、下部超音波モータ22に直接固定されている。
【0028】
さらに、複合メカニカルリンク23は、上部プレート231と羽固定プレート234とを回転可能に接続するアラミドフィルム237、羽固定プレート234と中間プレート233とを回転可能に接続するアラミドフィルム236、および中間プレート233と下部プレート232とを回転可能に接続するアラミドフィルム235とを備えている。言い換えれば、中間プレート233の1つの辺縁は、アラミドフィルム235が介在する状態で、下部プレート232の1つの辺縁に回転可能に接続されている。中間プレート233の他の辺縁は、アラミドフィルム236が介在する状態で、羽固定プレート234の1つの辺縁に回転可能に接続されている。羽固定プレート234の他方の辺縁は、アラミドフィルム237が介在する状態で、上部プレート231の1つの辺縁に回転可能に接続されている。
【0029】
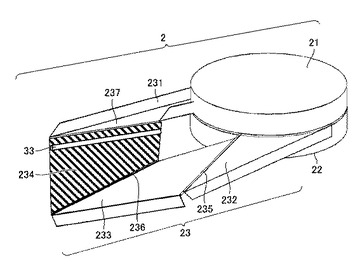
図2に示される構造から羽部3のみが取り外された構造が図3に示されている。図3におけるハッチングで示された領域が羽固定プレート234である。すなわち、羽部3は、羽固定プレート234に取り付け可能であるとともに、羽固定プレート234から取り外し可能である。なお、羽部3が、羽固定プレート234ではなく、中間プレート233に取り外し可能な態様で取り付けられていてもよい。
【0030】
[アクチュエータのモータ]
上部プレート231を駆動するモータおよび下部プレート232を駆動するモータのそれぞれとしては、正回転および逆回転をすることが可能であり、かつ、パワーの質量に対する比が大きいという理由で、本実施の形態においては、超音波モータが用いられている。しかしながら、アクチュエータを駆動するためのモータの種類は、超音波モータに限定されず、他のいかなる種類のモータであってもよい。たとえば、本発明のアクチュエータは、人工筋肉によって構成されていてもよい。この場合においても、人工筋肉は、上部超音波モータ21および下部超音波モータ22がそれぞれ上部プレート231および下部プレート232を駆動させる態様と同様の態様で、上部プレート231および下部プレート232を駆動させることができるものとする。また、本発明の羽ばたき浮上移動装置は、人工筋肉が羽固定プレート234を駆動させることによって羽部3に羽ばたき動作をさせることができるのであれば、人工筋肉が上部超音波モータ21および下部超音波モータ22とは異なる動作を羽固定プレート234にさせるものであってもよい。つまり、羽固定プレート234に羽部3を取付けるための構造以外の構造は、いかなるものであってもよい。
【0031】
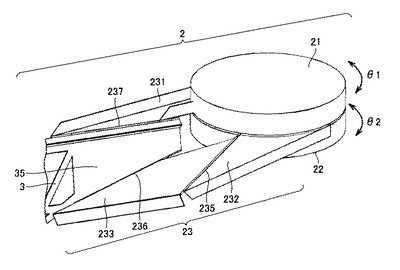
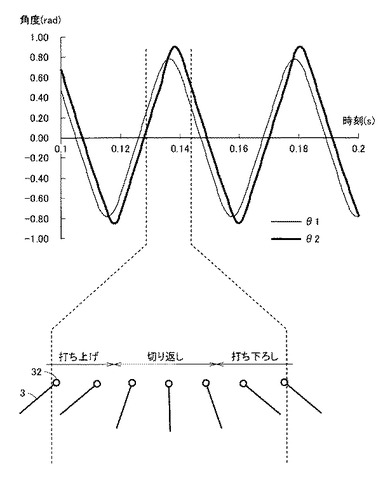
また、上部超音波モータ21および下部超音波モータ22は、図1に示される制御部50に搭載された駆動回路およびプログラムによって駆動される。それにより、図4に示されるような態様で、円盤形状の上部超音波モータ21が、中心軸まわりに回転角θ1(図3参照)で回転往復運動をし、かつ、円盤形状の下部超音波モータ22が、中心軸まわりに回転角θ2(図3参照)で回転往復運動をする。上部超音波モータ21の回転中心軸と下部超音波モータ22の回転中心軸とは一致している。
【0032】
したがって、羽部3は、図4に示されるように、上部超音波モータ21および下部超音波モータ22の中心軸をその回転中心軸として、所定の平面に沿って往復回転運動をするとともに、羽部3の前縁部、すなわち概ねアラミドフィルム237が延びる方向に沿った軸を中心軸とする捻り運動をする。この往復運動の周波数は、25Hzである。また、前述の往復回転運動および捻り運動は、いずれも、上部超音波モータ21および下部超音波モータ22のそれぞれの回転角を独立して制御することにより実現される。このときの超音波モータの回転角を制御する駆動回路およびその制御のためのアルゴリズムは、カメラのレンズ駆動機構などで既に実用化されている技術であるので、その説明は省略される。
【0033】
本実施の形態においては、図4に示される羽ばたき動作によって、羽ばたき浮上移動装置の羽部3は、前後方向において往復運動をするとともに、往復運動の反転の前後で、前縁部を回転軸とする捻り運動をすることになる。しかしながら、本発明の羽ばたき浮上移動装置は、図4に示される羽ばたき動作以外の羽ばたき方をするものであってもよい。つまり、本発明の羽ばたき浮上移動装置は、羽固定プレート234に羽部3を取付けるための構造を特徴とするため、その羽ばたき動作は特に実施の形態において示されたものに限定されず、いかなるものであってもよい。
【0034】
[羽固定プレート]
図5に示されるように、羽固定プレート234には、羽部3の根元部35が接着されている。また、羽固定プレート234には、後述される羽部3の折板構造32に対応する部位に、位置決め用の用凸部33が設けられている。本実施の形態においては、用凸部33を製作することが容易であることを重視して、折板構造32および羽固定プレート234によって形成される三角柱の空間に内接する径の円柱が、羽固定プレート234に固定されている。その円柱の固定方法および形状は、本発明の目的を達成することができる限り、いかなるものであってもよい。
【0035】
また、本実施の形態においては、本発明の中間部として、羽固定プレート234のようなプレート状の部材が用いられているが、羽部3が取付けられかつ取外され得るものであれば、中間部の構造は、プレート状に限定されず、いかなる形状を有していてもよい。
【0036】
<羽部>
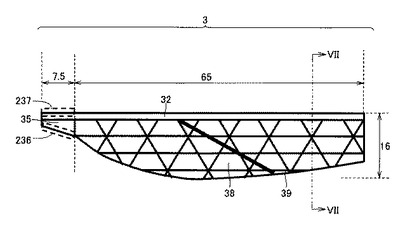
羽部3は、軽量化を目的として、図6および図7に示されるように、CFRP(繊維強化プラスチック)で構成される外枠39にアラミドフィルム38を貼り付けることによって形成される。なお、外枠39の一部は、三角形の領域を形成するように設けられている。また、羽部3の根元部35は、後述されるように、アクチュエータ2における複合メカニカルリンク23の羽固定プレート234に取り外し可能な態様で取り付けられている。また、図6には、点線にて上下のアラミドフィルム236および237の位置も示されている。アラミドフィルム236および237は、いずれも、羽固定プレート234に接着されているものであり、羽部3に直接固定されているものではない。
【0037】
なお、本実施の形態においては、羽部3の構造を具体的に規定しているが、羽部3の構造は、本発明の中間部、具体的には、羽固定プレーと234に取付けられ得るものであってかつ羽固定プレート234から取外され得るものであれば、いかなるものであってもよい。
【0038】
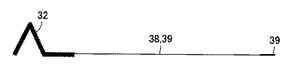
羽部3の前縁部に沿って、折板構造32が延びている。すなわち、外枠39は、羽部3の前縁部において、その長手方向に沿って延びる溝を有している。折板構造32は、羽部3に要求される強度の条件および重さの条件の双方を具備する。折板構造32は、一般的に昆虫の羽に設けられており、それはコルゲーションと呼ばれる。また、折板構造32は、一般に、前縁部を含む平面内の曲げに対する羽部3の剛性を大きくしながら、前縁部を中心軸とする捻りに対する羽部3の剛性を低くすることができるものであれば、その形状はいかなるものであってもよい。しかしながら、本発明の羽部3の実現性を考慮すると、羽部3が羽固定プレート234に装着された際に、折板構造32が羽固定プレート234に接触しないことが望ましい。そのため、本実施の形態においては、折板構造32は、羽固定プレート234が取り付けられる面の裏側の面から外方へ突出しているが、羽固定プレート234が取り付けられる面から外方へ突出していないものとする。なお、図7においては、1つの山形部が設けられた折板構造32が示されているが、複数の山形部が設けられた折板構造32であってもよい。
【0039】
なお、本実施の形態においては、羽部3の前縁部に折板構造32が設けられている構造が説明されたが、羽部3の前縁部に折板構造32が設けられていないものであってもよい。つまり、折板構造32は、羽部3を羽固定プレート234に対して高い制度で位置決めするに必要なものであって、羽部3を固定プレート234に取付け可能にしかつ羽部3を固定プレート234から取外し可能にするための必須の構成ではない。
【0040】
(羽接続プレートと羽部の接続)
次ぎに、図5を用いて、羽部の羽接続プレートへの取り付け手法が説明される。
【0041】
羽部3は、折板構造32を除いて実質的に平面形状を有している。そのため、羽部3は、接着剤によって、実質的に平面形状を有する羽固定プレート234に容易に接着され得る。なお、羽部3が平面形状を有していることは、本発明に必須の要件ではない。羽部3を羽固定プレート234に取付けることができかつ羽部3を羽固定プレート234取外すことができるのであれば、羽部3の形状はいかなるものであってもよい。
【0042】
また、位置決め用凸部33が、羽部3における折板構造32によって構成される位置決め用溝に嵌り込むことにより、羽部3の羽固定プレート234に対する位置関係が規定される。そのため、羽部3の交換に起因する羽固定プレート234に対する羽部3の位置決め誤差はほとんど生じない。
【0043】
なお、本発明者らの実験によれば、接着強度、剥がし易さ、および硬化時間の短さの3つの要素から評価して、シアノアクリレート系の接着剤が、羽部3と羽固定プレーと234との位置関係の固定のために適していることが判明している。なお、接着剤は、羽部3と羽固定プレート234とを固定することができるものであれば、いかなる種類のものであってもよい。
【0044】
(発明の効果)
従来においては、羽部3の前縁部および後縁部に、直接、アラミドフィルム236およびアラミドフィルム237が接続されていた。一方、本実施の形態においては、アラミドフィルム236およびアラミドフィルム237に接続された羽固定プレート234に羽部3が取り付けられている。したがって、羽ばたき浮上移動装置のユーザは、アラミドフィルム236およびアラミドフィルム237を切断したり、アラミドフィルム236およびアラミドフィルム237を再度作成したりすることなく、羽部3を交換することができる。そのため、アラミドフィルム236およびアラミドフィルム237の切断および再作成に起因する複合メカニカルリンク23に対する羽部3の組み付け精度の低下を防止することができる。
【0045】
上記本実施の形態の羽ばたき浮上移動装置によれば、羽固定プレート234の分だけ、羽ばたき浮上移動装置の質量および羽ばたき駆動トルクが増加することになる。しかしながら、実質上、羽固定プレート234に起因する羽ばたき浮上移動装置の質量の増加は、無視できる程度に小さい。その理由は、羽固定プレート234は、羽部3の根元プレートに接着された状態で、羽ばたき運動に耐える程度の厚さを有していさえすればよいからである。また、羽固定プレート234は、羽部3の回転中心位置の近傍に設けられている。そのため、羽固定プレート234の増加に起因する慣性(イナーシャ)の増大もほとんどない。
【0046】
本発明者らが製造した羽ばたき浮上移動装置によれば、羽固定プレート234の質量は8mgであり、その回転半径は約20mmである。また、羽部3の質量は約20mgであり、その回転半径は約80mmである。すなわち、羽固定プレート234による慣性(イナーシャ)の増加は羽部3の全体の慣性の約1/40である。
【0047】
(補足事項)
なお、本実施の形態の羽ばたき浮上移動装置と従来の羽ばたき浮上移動装置との差異を明確にするため、従来技術の羽ばたき浮上移動装置のメカニカルリンクと本実施の形態の羽ばたき浮上移動装置のメカニカルリンクとの相違点を述べた。しかしながら、本発明の羽ばたき浮上移動装置は、本実施の形態の羽ばたき浮上移動装置に限定されるものではなく、羽部3の一端部がアクチュエータに固定された状態で、羽部3に往復回転運動および捻り運動をさせることにより浮上力を生み出すことができる羽ばたき浮上移動装置であれば、いかなるものであってもよい。なお、本実施の形態においては、往復運動における運動方向の反転の前後の所定期間において、前縁部を回転中心軸とする捻り運動を羽部3にさせることによって、羽部3に回転揚力が生じている。ただし、本発明の羽ばたき浮上移動装置は、この往復運動および捻り運動の組合せ以外の運動によって羽ばたき浮上移動装置に羽ばたき動作をさせ、浮上力を生じさせるものであってもよい。
【0048】
(実施の形態2)
次に、図8を用いて、本発明の実施の形態2の羽ばたき浮上移動装置が説明される。なお、本実施の形態の羽ばたき浮上移動装置の部位のうち、実施の形態1の羽ばたき浮上移動装置の部位との同一の構成および機能を有する部位は、実施の形態1において用いられた参照符号と同一の参照符号を付されており、その説明は必要がなければ、繰り返されない。
【0049】
(羽固定プレート)
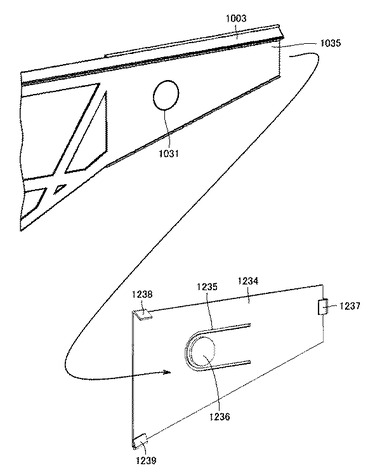
羽固定プレート1234には、図8に示されるように、平面視においてU字形状を有する溝1235が設けられている。また、U字形状を有する溝1235の底部の近傍に、薄い円柱状の突出部1236が設けられている。羽部1003が、羽固定プレート1234に固定されている状態では、突出部1236が、後述される羽部1003の根元部1035の凹部または貫通孔1031に嵌り込んでいる。さらに、羽固定プレート1234には、図8に示されるような爪部1237、1238、および1239が設けられている。したがって、羽部1003は、羽固定プレート1234に固定される。より具体的には、羽部3は、爪部1237、1238、および1239によって羽固定プレート1234の主表面に対して垂直な方向の移動が拘束されるとともに、突出部1236によって羽固定プレート1234の主表面に平行な方向の移動が拘束される。また、図8から分かるように、羽部3の平面視において、U字形状を有する溝1235は、U字の下部が羽部3の先端を向くように、かつ、U字の上部すなわち開口部が根元を向くように配置されている。これは、次のような理由のためである。
【0050】
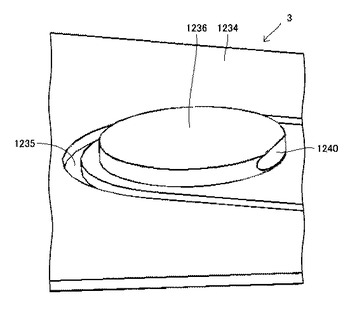
一般に、羽部3の駆動により、羽部3の先端部に向かって引張り力が作用する。このとき、U字形状の内側の領域にかかる力は引っ張り方向に作用する。つまり、U字形状の内側の領域に圧縮力が作用することはない。そのため、U字形状の内側の領域は、その膜厚が小さくても、座屈することがない。したがって、羽固定プレート1234の材料として、比較的薄い材料を用いることができる。さらに、図9に示されるように、突出部1236に凹み1240が設けられていてもよい。凹み1240に貫通孔1031の周縁部が係止されるものであれば、貫通孔1031の周縁部の移動固定プレート1234から離れる方向の移動が凹み1240によって拘束される。そのため、羽部3の羽固定プレート1234からの脱落を確実に防止することができる。
【0051】
(発明の効果)
本実施の形態の羽ばたき浮上移動装置によれば、羽部3の羽固定プレート1234に対する固定のために接着剤を用いる必要がない。そのため、羽部3をより容易に交換することができる。
【0052】
(補足)
なお、本実施の形態の羽ばたき浮上移動装置と従来の羽ばたき浮上移動装置との差異を明確にするため、従来技術の羽ばたき浮上移動装置のメカニカルリンクと本実施の形態の羽ばたき浮上移動装置のメカニカルリンクとの対比を述べた。しかしながら、本発明の羽ばたき浮上移動装置は、本実施の形態の羽ばたき浮上移動装置に限定されるものではなく、羽部3の一端部が固定された状態で、羽部3を往復回転運動および捻り運動をさせることにより浮上力を生み出すことができる羽ばたき浮上移動装置であれば、いかなるものであってもよい。また、実施の形態1と同様に、羽ばたき浮上移動装置の羽ばたき方はいかなるものであってもよい。
【0053】
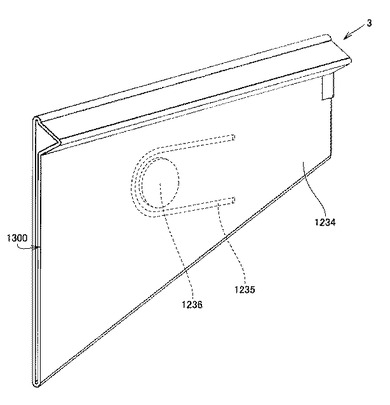
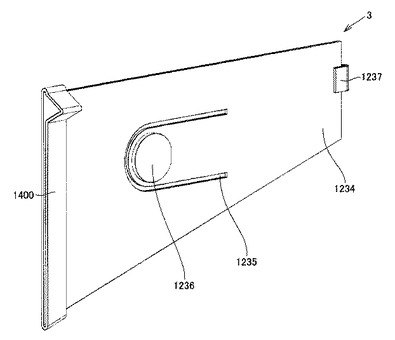
また、図10に示されるように、爪部1237、1238、および1239の代わりに、羽固定プレート1234がポケット状の構造1300を有していてもよい。ポケット構造1300とは、袋状構造であって、その内側に羽部3の根元部1035が挿入され得る構造である。ポケット構造1300の内面には、前述の突出部1236が設けられている。したがって、羽部3がポケット構造1300内に挿入されると、凹部または貫通孔1031と突出部1236とが嵌り合う。また、図11に示されるように、軽量化のために、爪部1237と、爪部1238および1239の代わりの帯状部1400に置き換えられてもよい。また、複数の帯状部1400が設けられていてもよい。また、爪部1237、1238、1239、ポケット構造1300、および帯状部1400は、羽部3の固定プレート1234の主表面に対して垂直な方向の移動を拘束する機能を有しているのであれば、いかなるものであってもよい。さらに、実施の形態1において説明された羽部3と羽固定プレーと1234との接着剤による接着と、本字実施の形態において説明された羽固定プレート1234に設けられた爪部、ポケット構造、および帯状部による羽部3の羽固定プレート1234に対する固定との双方が用いられてもよい。
【0054】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0055】
【図1】実施の形態の羽ばたき浮上移動装置の概略を示す図である。
【図2】実施の形態1の羽ばたき浮上移動装置におけるアクチュエータの概略図である。
【図3】実施の形態1の羽ばたき浮上移動装置の羽固定プレートの概略図である。
【図4】実施の形態1の羽ばたき浮上移動装置の羽部の駆動状態を説明するための図である。
【図5】実施の形態1の羽ばたき浮上移動装置の羽固定プレートへの羽部の根元部の固定方法を説明するための図である。
【図6】実施の形態1の羽ばたき浮上移動装置の羽部の概略図である。
【図7】図6のVII−VII線断面図である。
【図8】実施の形態2の羽ばたき浮上移動装置の羽固定プレートへの羽部の根元部の固定方法を説明するための図である。
【図9】実施の形態2の羽ばたき浮上移動装置の羽固定プレートへの羽部の根元部の固定方法を説明するための図である。
【図10】実施の形態2の羽ばたき浮上移動装置の他の例の羽固定プレートを示す図である。
【図11】実施の形態2の羽ばたき浮上移動装置のさらに他の例の羽固定プレートを示す図である。
【図12】従来の羽ばたき浮上移動装置の概略図である。
【符号の説明】
【0056】
1 筐体、2 アクチュエータ、3,1003 羽部、21 上部超音波モータ、22 下部超音波モータ、35 根元部、234,1234 羽固定プレート。
【技術分野】
【0001】
本発明は、羽ばたき浮上移動装置の羽部に関するものである。
【背景技術】
【0002】
羽ばたき浮上移動装置は、従来の固定翼を有する飛行機およびヘリコプターよりも機動性において優れている。そのため、近年、羽ばたき飛行するロボットの工学的な実現を目指した研究が盛んになっている。特に、トンボおよびハエなどの昆虫が行っているようなホバリング(停空飛翔)の工学的な応用が期待されている。昆虫に見られるような高い機動力を羽ばたき浮上移動装置に発揮させるためには、左羽部および右羽部のそれぞれを少なくとも2自由度で駆動することが必要である。たとえば、特開2006−69482号公報においては、前述の2自由度の運動を、プレート、薄いフィルムによって構成されたヒンジ(蝶番)、および2つの回転部材(これらは、以後、「上部ロータ」および「下部ロータ」と呼ばれる。)を用いて、羽部の根元部を2自由度で駆動する方法が開示されている。
【特許文献1】特開2006−69482号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記の従来の羽ばたき浮上移動装置においては、羽ばたき浮上移動装置のユーザ自身が損傷した羽部を新たな羽部へ交換することが困難であるという問題がある。以下、その問題が具体的に説明される。
【0004】
図12は、特開2006−69482号公報に開示された羽ばたき浮上移動装置の外観図である。図12に示されるように、左および右の羽部2110は、筐体2101から外方に突出している。それにより、羽部2110は羽ばたき飛行中に他の物体に衝突し易い。また、羽部2110は、極めて軽量であることを必要とするため、極めて細い枠およびフィルムによって形成されている。そのため、羽部2110は、外部からの衝撃により破損し易い。その結果、羽部2110の破損が頻繁に生じてしまう。したがって、ユーザによるメンテナンスの容易性の観点から、羽部を容易に交換することができる羽ばたき浮上移動装置が求められている。
【0005】
また、羽部2110は、それに隣接するアクチュエータを構成するプレート部にフィルムを介して接続されている。羽部2110の交換のためには、破損した羽部2110をフィルムから取り外すこと、および、新たな羽部2110をフィルムに再度接着することが必要になる。
【0006】
しかしながら、羽部2110とプレート部との間隔が大きすぎると、アクチュエータの構成する機構の動作の精度が低下する。一方、逆に、羽部2110とプレート部との間隔が小さすぎると、羽部2110の根元部とプレート部とが接触してしまうため、アクチュエータを構成する機構が適正に動作することができない。したがって、羽部2110とプレートとの間隔は、アクチュエータを構成する機構の動作に悪影響を及ぼさない程度に設定されることが必要である。そのためには、高度な製作技術が要求される。
【0007】
また、前述の機構は、羽ばたき浮上移動装置の軽量化のために、極力小型化されている。そのため、羽部2110とプレート部との間隔は極めて小さい。したがって、羽ばたき浮上移動装置のユーザが羽部2110を交換すると、羽部2110とアクチュエータとの組み付け誤差に起因して羽ばたき浮上移動装置の性能に問題が生じることがある。
【0008】
以上から分かるように、従来の羽ばたき浮上移動装置によれば、現実的には、ユーザが破損した羽部2110を交換することができない。したがって、羽ばたき浮上移動装置の寿命は極めて短い。
【0009】
本発明は、上述の事情に鑑みなされたものであり、その目的は、ユーザが容易に交換することができる羽部を備えた羽ばたき浮上移動装置を提供することである。
【課題を解決するための手段】
【0010】
本発明の羽ばたき浮上移動装置は、羽ばたき運動する羽部と、羽部を駆動するアクチュエータと、アクチュエータを制御する制御部とを備えている。また、羽部は、アクチュエータに取り付け可能に構成されているとともに、アクチュエータから取り外し可能に構成されている。この構成によれば、羽部を容易に交換することができる。
【0011】
また、アクチュエータは、制御部により制御される第1モータと、第1モータから独立して制御部により制御される第2モータと、第1モータにより直接的に駆動される第1被駆動部と、第2モータにより直接的に駆動される第2被駆動部と、第1被駆動部に対して回転可能に接続された第1中間部と、第2被駆動部および第1中間部のそれぞれに対して回転可能に接続された第2中間部と含んでいてもよい。この場合、羽部は、第1中間部および第2中間部のうちのいずれか一方の中間部に取り付け可能に構成されているとともに、一方の中間部から取り外し可能に構成されていることが望ましい。また、制御部は、第1モータおよび第2モータに第1被駆動部および第2被駆動部を駆動させることにより、羽部がその根元部を中心軸とする往復回転運動およびその前縁部を中心軸とする捻り運動をするように、第1中間部および第2中間部の姿勢を変化させることが望ましい。この構成によれば、中間部への羽部の取り付けおよび中間部からの羽部の取り外しにより、羽部を容易に交換することができる。
【0012】
また、羽部は、その前縁部に沿って延びる折板構造を有しており、その折板構造が、羽部の一方の主表面側においてのみ突出していることが望ましい。この場合、一方の主表面は、羽部の両主表面のうちのアクチュエータに接触している主表面の裏側の主表面であることが望ましい。この構成によれば、羽部の折板構造とアクチュエータとが接触することがない。そのため、羽部の交換を容易にすることができる。
【0013】
また、羽部がアクチュエータに接着剤により固定されていることが望ましい。この構成によれば、アクチュエータに羽部を取り付けるための専用の構造を設ける必要がない。そのため、アクチュエータの重量の増加を抑制し、かつ、羽部の取り付け作業を複雑化させることを防止しながら、羽部を容易に交換することできる羽ばたき浮上移動装置を提供することができる。
【0014】
また、アクチェータが羽部のアクチュエータに対する位置を規定する位置決め用凸部を有しており、位置決め用凸部が折板構造によって形成される位置決め用溝に嵌まり込むことが望ましい。この構成によれば、羽部のアクチュエータに対する位置決めの正確さを容易に向上させることができる。
【0015】
また、位置決め用凸部が位置決め用溝に内接する形状を有していることが望ましい。この構成によれば、羽部のアクチュエータに対する位置決めの正確さを最大限に向上させることができる。
【0016】
また、アクチュエータが羽部の根元部が挿入されるポケット部を有していることが望ましい。この構成によれば、接着剤を用いることなく、羽部のアクチュエータに対する位置を固定することができる。
【0017】
また、アクチュエータが突出部を有し、羽部の根元部が、突出部が嵌め込まれる凹部または貫通孔を有していることが望ましい。この構成によれば、羽部の面内方向における羽部のアクチュエータに対する移動が突出部によって拘束される。
【0018】
また、アクチュエータが平面視においてU字を描く溝を有し、突出部がU字の内側の領域に設けられていることが望ましい。この構成によれば、U字の内側の領域が面外方向に容易に撓む。そのため、突出部をアクチュエータの主表面に向かう方向に押すことにより、凹部または貫通孔から容易に取り外すことができる。
【0019】
また、突出部が羽部の根元部側から羽部の先端側へ窪む溝状の凹みを有し、貫通孔の周辺の部分が前記溝状の凹みに嵌り込むことが望ましい。この構成によれば、羽部が羽ばたき運動中にアクチュエータから外れてしまうことが確実に防止される。
【0020】
また、U字を描く溝は、U字の下部が羽部の先端部に向かうように、かつ、U字の上部が羽部の根元部に向かうように設けられていることが望ましい。この構成によれば、羽部が羽ばたき運動しているときに、アクチュエータのうちのU字を描く溝の内側の領域に生じる力は、圧縮力ではなく、引っ張り力である。したがって、膜厚が小さい羽部であっても、アクチュエータのうちのU字を描く溝の内側の領域が座屈することが防止される。
【発明の効果】
【0021】
本発明によれば、羽ばたき浮上移動装置の羽部を容易に交換することが可能になる。
【発明を実施するための最良の形態】
【0022】
(実施の形態1)
以下、図1〜図6を用いて、本発明の実施の形態1の浮上移動装置が説明される。なお、本発明の目的は、羽ばたき浮上移動装置の羽部を容易に交換する手法を提供することである。そのため、羽ばたき浮上移動装置の各構成要素としては、その代表例のみが挙げられる。したがって、本発明の範囲は、以下に記載される代表例の構成要素に限定されない。
【0023】
(羽ばたき浮上移動装置の全体構成)
<全体構成>
以下、図1を用いて、本発明の実施の形態の羽ばたき浮上移動装置の構成が説明される。
【0024】
羽ばたき浮上移動装置は、筐体1を備えている。筐体1にはアクチュエータ2が固定されている。アクチュエータ2には羽部3が取り付けられている。また、アクチュエータ2は、筐体1内に搭載された制御部50に格納された駆動回路およびプログラムからの指示によって駆動される。
【0025】
また、筐体1は左右対称である。また、アクチュエータ2および羽部3も、筐体1の対称面に対して鏡面対称に配置されている。本実施の形態の羽ばたき浮上移動装置は、一般的な羽ばたき浮上移動装置の構成と同様である。しかしながら、羽ばたき飛行の特性が損なわれない限り、本発明の羽ばたき装置の構成は、本実施の形態の羽ばたき装置の構成に限定されない。以下においては、左および右のアクチュエータおよび羽部のうちの一方の説明がなされ、左および右のアクチュエータおよび羽部のうちの他方の説明はなされない。また、実施の形態の羽ばたき浮上移動装置の駆動回路および筐体1の形状等は、本発明の羽ばたき浮上移動装置の一例であり、本発明の羽ばたき浮上移動装置の構造は、羽部の羽ばたき動作により流体中を飛行することができるものであれば、実施の形態の羽ばたき装置の構造に限定されない。
【0026】
<アクチュエータ>
次に、図2〜図4を用いてアクチュエータ2の構成が説明される。
【0027】
[アクチュエータの構成]
アクチュエータ2は、羽部3に接続される複合メカニカルリンク23を備えている。複合メカニカルリンク23は、上部超音波モータ21と下部超音波モータ22とにより駆動される。複合メカニカルリンク23は、本発明の第1被駆動部の一例の上部プレート231と、本発明の第2被駆動部の一例の下部プレート232とを備えている。また、複合メカニカルリンク23は、本発明の第1中間部の一例の中間プレート233と、本発明の第2中間部の一例の羽固定プレート234とを備えている。上部プレート231は、上部超音波モータ21に直接固定されている。下部プレート232は、下部超音波モータ22に直接固定されている。
【0028】
さらに、複合メカニカルリンク23は、上部プレート231と羽固定プレート234とを回転可能に接続するアラミドフィルム237、羽固定プレート234と中間プレート233とを回転可能に接続するアラミドフィルム236、および中間プレート233と下部プレート232とを回転可能に接続するアラミドフィルム235とを備えている。言い換えれば、中間プレート233の1つの辺縁は、アラミドフィルム235が介在する状態で、下部プレート232の1つの辺縁に回転可能に接続されている。中間プレート233の他の辺縁は、アラミドフィルム236が介在する状態で、羽固定プレート234の1つの辺縁に回転可能に接続されている。羽固定プレート234の他方の辺縁は、アラミドフィルム237が介在する状態で、上部プレート231の1つの辺縁に回転可能に接続されている。
【0029】
図2に示される構造から羽部3のみが取り外された構造が図3に示されている。図3におけるハッチングで示された領域が羽固定プレート234である。すなわち、羽部3は、羽固定プレート234に取り付け可能であるとともに、羽固定プレート234から取り外し可能である。なお、羽部3が、羽固定プレート234ではなく、中間プレート233に取り外し可能な態様で取り付けられていてもよい。
【0030】
[アクチュエータのモータ]
上部プレート231を駆動するモータおよび下部プレート232を駆動するモータのそれぞれとしては、正回転および逆回転をすることが可能であり、かつ、パワーの質量に対する比が大きいという理由で、本実施の形態においては、超音波モータが用いられている。しかしながら、アクチュエータを駆動するためのモータの種類は、超音波モータに限定されず、他のいかなる種類のモータであってもよい。たとえば、本発明のアクチュエータは、人工筋肉によって構成されていてもよい。この場合においても、人工筋肉は、上部超音波モータ21および下部超音波モータ22がそれぞれ上部プレート231および下部プレート232を駆動させる態様と同様の態様で、上部プレート231および下部プレート232を駆動させることができるものとする。また、本発明の羽ばたき浮上移動装置は、人工筋肉が羽固定プレート234を駆動させることによって羽部3に羽ばたき動作をさせることができるのであれば、人工筋肉が上部超音波モータ21および下部超音波モータ22とは異なる動作を羽固定プレート234にさせるものであってもよい。つまり、羽固定プレート234に羽部3を取付けるための構造以外の構造は、いかなるものであってもよい。
【0031】
また、上部超音波モータ21および下部超音波モータ22は、図1に示される制御部50に搭載された駆動回路およびプログラムによって駆動される。それにより、図4に示されるような態様で、円盤形状の上部超音波モータ21が、中心軸まわりに回転角θ1(図3参照)で回転往復運動をし、かつ、円盤形状の下部超音波モータ22が、中心軸まわりに回転角θ2(図3参照)で回転往復運動をする。上部超音波モータ21の回転中心軸と下部超音波モータ22の回転中心軸とは一致している。
【0032】
したがって、羽部3は、図4に示されるように、上部超音波モータ21および下部超音波モータ22の中心軸をその回転中心軸として、所定の平面に沿って往復回転運動をするとともに、羽部3の前縁部、すなわち概ねアラミドフィルム237が延びる方向に沿った軸を中心軸とする捻り運動をする。この往復運動の周波数は、25Hzである。また、前述の往復回転運動および捻り運動は、いずれも、上部超音波モータ21および下部超音波モータ22のそれぞれの回転角を独立して制御することにより実現される。このときの超音波モータの回転角を制御する駆動回路およびその制御のためのアルゴリズムは、カメラのレンズ駆動機構などで既に実用化されている技術であるので、その説明は省略される。
【0033】
本実施の形態においては、図4に示される羽ばたき動作によって、羽ばたき浮上移動装置の羽部3は、前後方向において往復運動をするとともに、往復運動の反転の前後で、前縁部を回転軸とする捻り運動をすることになる。しかしながら、本発明の羽ばたき浮上移動装置は、図4に示される羽ばたき動作以外の羽ばたき方をするものであってもよい。つまり、本発明の羽ばたき浮上移動装置は、羽固定プレート234に羽部3を取付けるための構造を特徴とするため、その羽ばたき動作は特に実施の形態において示されたものに限定されず、いかなるものであってもよい。
【0034】
[羽固定プレート]
図5に示されるように、羽固定プレート234には、羽部3の根元部35が接着されている。また、羽固定プレート234には、後述される羽部3の折板構造32に対応する部位に、位置決め用の用凸部33が設けられている。本実施の形態においては、用凸部33を製作することが容易であることを重視して、折板構造32および羽固定プレート234によって形成される三角柱の空間に内接する径の円柱が、羽固定プレート234に固定されている。その円柱の固定方法および形状は、本発明の目的を達成することができる限り、いかなるものであってもよい。
【0035】
また、本実施の形態においては、本発明の中間部として、羽固定プレート234のようなプレート状の部材が用いられているが、羽部3が取付けられかつ取外され得るものであれば、中間部の構造は、プレート状に限定されず、いかなる形状を有していてもよい。
【0036】
<羽部>
羽部3は、軽量化を目的として、図6および図7に示されるように、CFRP(繊維強化プラスチック)で構成される外枠39にアラミドフィルム38を貼り付けることによって形成される。なお、外枠39の一部は、三角形の領域を形成するように設けられている。また、羽部3の根元部35は、後述されるように、アクチュエータ2における複合メカニカルリンク23の羽固定プレート234に取り外し可能な態様で取り付けられている。また、図6には、点線にて上下のアラミドフィルム236および237の位置も示されている。アラミドフィルム236および237は、いずれも、羽固定プレート234に接着されているものであり、羽部3に直接固定されているものではない。
【0037】
なお、本実施の形態においては、羽部3の構造を具体的に規定しているが、羽部3の構造は、本発明の中間部、具体的には、羽固定プレーと234に取付けられ得るものであってかつ羽固定プレート234から取外され得るものであれば、いかなるものであってもよい。
【0038】
羽部3の前縁部に沿って、折板構造32が延びている。すなわち、外枠39は、羽部3の前縁部において、その長手方向に沿って延びる溝を有している。折板構造32は、羽部3に要求される強度の条件および重さの条件の双方を具備する。折板構造32は、一般的に昆虫の羽に設けられており、それはコルゲーションと呼ばれる。また、折板構造32は、一般に、前縁部を含む平面内の曲げに対する羽部3の剛性を大きくしながら、前縁部を中心軸とする捻りに対する羽部3の剛性を低くすることができるものであれば、その形状はいかなるものであってもよい。しかしながら、本発明の羽部3の実現性を考慮すると、羽部3が羽固定プレート234に装着された際に、折板構造32が羽固定プレート234に接触しないことが望ましい。そのため、本実施の形態においては、折板構造32は、羽固定プレート234が取り付けられる面の裏側の面から外方へ突出しているが、羽固定プレート234が取り付けられる面から外方へ突出していないものとする。なお、図7においては、1つの山形部が設けられた折板構造32が示されているが、複数の山形部が設けられた折板構造32であってもよい。
【0039】
なお、本実施の形態においては、羽部3の前縁部に折板構造32が設けられている構造が説明されたが、羽部3の前縁部に折板構造32が設けられていないものであってもよい。つまり、折板構造32は、羽部3を羽固定プレート234に対して高い制度で位置決めするに必要なものであって、羽部3を固定プレート234に取付け可能にしかつ羽部3を固定プレート234から取外し可能にするための必須の構成ではない。
【0040】
(羽接続プレートと羽部の接続)
次ぎに、図5を用いて、羽部の羽接続プレートへの取り付け手法が説明される。
【0041】
羽部3は、折板構造32を除いて実質的に平面形状を有している。そのため、羽部3は、接着剤によって、実質的に平面形状を有する羽固定プレート234に容易に接着され得る。なお、羽部3が平面形状を有していることは、本発明に必須の要件ではない。羽部3を羽固定プレート234に取付けることができかつ羽部3を羽固定プレート234取外すことができるのであれば、羽部3の形状はいかなるものであってもよい。
【0042】
また、位置決め用凸部33が、羽部3における折板構造32によって構成される位置決め用溝に嵌り込むことにより、羽部3の羽固定プレート234に対する位置関係が規定される。そのため、羽部3の交換に起因する羽固定プレート234に対する羽部3の位置決め誤差はほとんど生じない。
【0043】
なお、本発明者らの実験によれば、接着強度、剥がし易さ、および硬化時間の短さの3つの要素から評価して、シアノアクリレート系の接着剤が、羽部3と羽固定プレーと234との位置関係の固定のために適していることが判明している。なお、接着剤は、羽部3と羽固定プレート234とを固定することができるものであれば、いかなる種類のものであってもよい。
【0044】
(発明の効果)
従来においては、羽部3の前縁部および後縁部に、直接、アラミドフィルム236およびアラミドフィルム237が接続されていた。一方、本実施の形態においては、アラミドフィルム236およびアラミドフィルム237に接続された羽固定プレート234に羽部3が取り付けられている。したがって、羽ばたき浮上移動装置のユーザは、アラミドフィルム236およびアラミドフィルム237を切断したり、アラミドフィルム236およびアラミドフィルム237を再度作成したりすることなく、羽部3を交換することができる。そのため、アラミドフィルム236およびアラミドフィルム237の切断および再作成に起因する複合メカニカルリンク23に対する羽部3の組み付け精度の低下を防止することができる。
【0045】
上記本実施の形態の羽ばたき浮上移動装置によれば、羽固定プレート234の分だけ、羽ばたき浮上移動装置の質量および羽ばたき駆動トルクが増加することになる。しかしながら、実質上、羽固定プレート234に起因する羽ばたき浮上移動装置の質量の増加は、無視できる程度に小さい。その理由は、羽固定プレート234は、羽部3の根元プレートに接着された状態で、羽ばたき運動に耐える程度の厚さを有していさえすればよいからである。また、羽固定プレート234は、羽部3の回転中心位置の近傍に設けられている。そのため、羽固定プレート234の増加に起因する慣性(イナーシャ)の増大もほとんどない。
【0046】
本発明者らが製造した羽ばたき浮上移動装置によれば、羽固定プレート234の質量は8mgであり、その回転半径は約20mmである。また、羽部3の質量は約20mgであり、その回転半径は約80mmである。すなわち、羽固定プレート234による慣性(イナーシャ)の増加は羽部3の全体の慣性の約1/40である。
【0047】
(補足事項)
なお、本実施の形態の羽ばたき浮上移動装置と従来の羽ばたき浮上移動装置との差異を明確にするため、従来技術の羽ばたき浮上移動装置のメカニカルリンクと本実施の形態の羽ばたき浮上移動装置のメカニカルリンクとの相違点を述べた。しかしながら、本発明の羽ばたき浮上移動装置は、本実施の形態の羽ばたき浮上移動装置に限定されるものではなく、羽部3の一端部がアクチュエータに固定された状態で、羽部3に往復回転運動および捻り運動をさせることにより浮上力を生み出すことができる羽ばたき浮上移動装置であれば、いかなるものであってもよい。なお、本実施の形態においては、往復運動における運動方向の反転の前後の所定期間において、前縁部を回転中心軸とする捻り運動を羽部3にさせることによって、羽部3に回転揚力が生じている。ただし、本発明の羽ばたき浮上移動装置は、この往復運動および捻り運動の組合せ以外の運動によって羽ばたき浮上移動装置に羽ばたき動作をさせ、浮上力を生じさせるものであってもよい。
【0048】
(実施の形態2)
次に、図8を用いて、本発明の実施の形態2の羽ばたき浮上移動装置が説明される。なお、本実施の形態の羽ばたき浮上移動装置の部位のうち、実施の形態1の羽ばたき浮上移動装置の部位との同一の構成および機能を有する部位は、実施の形態1において用いられた参照符号と同一の参照符号を付されており、その説明は必要がなければ、繰り返されない。
【0049】
(羽固定プレート)
羽固定プレート1234には、図8に示されるように、平面視においてU字形状を有する溝1235が設けられている。また、U字形状を有する溝1235の底部の近傍に、薄い円柱状の突出部1236が設けられている。羽部1003が、羽固定プレート1234に固定されている状態では、突出部1236が、後述される羽部1003の根元部1035の凹部または貫通孔1031に嵌り込んでいる。さらに、羽固定プレート1234には、図8に示されるような爪部1237、1238、および1239が設けられている。したがって、羽部1003は、羽固定プレート1234に固定される。より具体的には、羽部3は、爪部1237、1238、および1239によって羽固定プレート1234の主表面に対して垂直な方向の移動が拘束されるとともに、突出部1236によって羽固定プレート1234の主表面に平行な方向の移動が拘束される。また、図8から分かるように、羽部3の平面視において、U字形状を有する溝1235は、U字の下部が羽部3の先端を向くように、かつ、U字の上部すなわち開口部が根元を向くように配置されている。これは、次のような理由のためである。
【0050】
一般に、羽部3の駆動により、羽部3の先端部に向かって引張り力が作用する。このとき、U字形状の内側の領域にかかる力は引っ張り方向に作用する。つまり、U字形状の内側の領域に圧縮力が作用することはない。そのため、U字形状の内側の領域は、その膜厚が小さくても、座屈することがない。したがって、羽固定プレート1234の材料として、比較的薄い材料を用いることができる。さらに、図9に示されるように、突出部1236に凹み1240が設けられていてもよい。凹み1240に貫通孔1031の周縁部が係止されるものであれば、貫通孔1031の周縁部の移動固定プレート1234から離れる方向の移動が凹み1240によって拘束される。そのため、羽部3の羽固定プレート1234からの脱落を確実に防止することができる。
【0051】
(発明の効果)
本実施の形態の羽ばたき浮上移動装置によれば、羽部3の羽固定プレート1234に対する固定のために接着剤を用いる必要がない。そのため、羽部3をより容易に交換することができる。
【0052】
(補足)
なお、本実施の形態の羽ばたき浮上移動装置と従来の羽ばたき浮上移動装置との差異を明確にするため、従来技術の羽ばたき浮上移動装置のメカニカルリンクと本実施の形態の羽ばたき浮上移動装置のメカニカルリンクとの対比を述べた。しかしながら、本発明の羽ばたき浮上移動装置は、本実施の形態の羽ばたき浮上移動装置に限定されるものではなく、羽部3の一端部が固定された状態で、羽部3を往復回転運動および捻り運動をさせることにより浮上力を生み出すことができる羽ばたき浮上移動装置であれば、いかなるものであってもよい。また、実施の形態1と同様に、羽ばたき浮上移動装置の羽ばたき方はいかなるものであってもよい。
【0053】
また、図10に示されるように、爪部1237、1238、および1239の代わりに、羽固定プレート1234がポケット状の構造1300を有していてもよい。ポケット構造1300とは、袋状構造であって、その内側に羽部3の根元部1035が挿入され得る構造である。ポケット構造1300の内面には、前述の突出部1236が設けられている。したがって、羽部3がポケット構造1300内に挿入されると、凹部または貫通孔1031と突出部1236とが嵌り合う。また、図11に示されるように、軽量化のために、爪部1237と、爪部1238および1239の代わりの帯状部1400に置き換えられてもよい。また、複数の帯状部1400が設けられていてもよい。また、爪部1237、1238、1239、ポケット構造1300、および帯状部1400は、羽部3の固定プレート1234の主表面に対して垂直な方向の移動を拘束する機能を有しているのであれば、いかなるものであってもよい。さらに、実施の形態1において説明された羽部3と羽固定プレーと1234との接着剤による接着と、本字実施の形態において説明された羽固定プレート1234に設けられた爪部、ポケット構造、および帯状部による羽部3の羽固定プレート1234に対する固定との双方が用いられてもよい。
【0054】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0055】
【図1】実施の形態の羽ばたき浮上移動装置の概略を示す図である。
【図2】実施の形態1の羽ばたき浮上移動装置におけるアクチュエータの概略図である。
【図3】実施の形態1の羽ばたき浮上移動装置の羽固定プレートの概略図である。
【図4】実施の形態1の羽ばたき浮上移動装置の羽部の駆動状態を説明するための図である。
【図5】実施の形態1の羽ばたき浮上移動装置の羽固定プレートへの羽部の根元部の固定方法を説明するための図である。
【図6】実施の形態1の羽ばたき浮上移動装置の羽部の概略図である。
【図7】図6のVII−VII線断面図である。
【図8】実施の形態2の羽ばたき浮上移動装置の羽固定プレートへの羽部の根元部の固定方法を説明するための図である。
【図9】実施の形態2の羽ばたき浮上移動装置の羽固定プレートへの羽部の根元部の固定方法を説明するための図である。
【図10】実施の形態2の羽ばたき浮上移動装置の他の例の羽固定プレートを示す図である。
【図11】実施の形態2の羽ばたき浮上移動装置のさらに他の例の羽固定プレートを示す図である。
【図12】従来の羽ばたき浮上移動装置の概略図である。
【符号の説明】
【0056】
1 筐体、2 アクチュエータ、3,1003 羽部、21 上部超音波モータ、22 下部超音波モータ、35 根元部、234,1234 羽固定プレート。
【特許請求の範囲】
【請求項1】
羽ばたき運動する羽部と、
前記羽部を駆動するアクチュエータと、
前記アクチュエータを制御する制御部とを備え、
前記羽部は、前記アクチュエータに取り付け可能に構成されているとともに、前記アクチュエータから取り外し可能に構成されている、羽ばたき浮上移動装置。
【請求項2】
前記アクチュエータは、
前記制御部により制御される第1モータと、
前記第1モータから独立して前記制御部により制御される第2モータと、
前記第1モータにより直接的に駆動される第1被駆動部と、
前記第2モータにより直接的に駆動される第2被駆動部と、
前記第1被駆動部に対して回転可能に接続された第1中間部と、
前記第2被駆動部および前記第1中間部のそれぞれに対して回転可能に接続された第2中間部と含み、
前記羽部は、前記第1中間部および前記第2中間部のうちのいずれか一方の中間部に取り付け可能に構成されているとともに、前記一方の中間部から取り外し可能に構成されており、
前記制御部は、前記第1モータおよび前記第2モータに前記第1被駆動部および前記第2被駆動部を駆動させることにより、前記羽部がその根元部を中心軸とする往復回転運動およびその前縁部を中心軸とする捻り運動をするように、前記第1中間部および前記第2中間部の姿勢を変化させる、請求項1に記載の羽ばたき浮上移動装置。
【請求項3】
前記羽部は、その前縁部に沿って延びる折板構造を有し、
前記折板構造は、前記羽部の一方の主表面側においてのみ突出しており、
前記一方の主表面は、前記羽部の両主表面のうちの前記アクチュエータに接触している主表面の裏側の主表面である、請求項1または2に記載の羽ばたき浮上移動装置。
【請求項4】
前記羽部は、前記アクチュエータに接着剤により固定されている、請求項1〜3のいずれかに記載の羽ばたき浮上移動装置。
【請求項5】
前記アクチェータは、前記羽部の前記アクチュエータに対する位置を規定する位置決め用凸部を有しており、
前記位置決め用凸部は、前記折板構造によって形成される位置決め用溝に嵌まり込む、請求項1〜4のいずれかに記載の羽ばたき浮上移動装置。
【請求項6】
前記位置決め用凸部は、前記位置決め用溝に内接する形状を有している、請求項5に記載の羽ばたき浮上移動装置。
【請求項7】
前記アクチュエータは、前記羽部の根元部が挿入されるポケット部を有している、請求項1〜6のいずれかに記載の羽ばたき浮上移動装置。
【請求項8】
前記アクチュエータは、突出部を有し、
前記羽部の根元部は、前記突出部が嵌め込まれる凹部または貫通孔を有している、請求項1〜7のいずれかに記載の羽ばたき浮上移動装置。
【請求項9】
前記アクチュエータは、平面視においてU字を描く溝を有し、
前記突出部が、前記U字の内側の領域に設けられている、請求項8に記載の羽ばたき浮上移動装置。
【請求項10】
前記突出部は、前記羽部の根元部側から前記羽部の先端側へ窪む溝状の凹みを有し、
前記貫通孔の周辺の部分が前記溝状の凹みに嵌まり込む、請求項9に記載の羽ばたき浮上移動装置。
【請求項11】
前記U字を描く溝は、前記U字の下部が前記羽部の先端部に向かうように、かつ、前記U字の上部が前記羽部の根元部に向かうように設けられている、請求項9または10に記載の羽ばたき浮上移動装置。
【請求項1】
羽ばたき運動する羽部と、
前記羽部を駆動するアクチュエータと、
前記アクチュエータを制御する制御部とを備え、
前記羽部は、前記アクチュエータに取り付け可能に構成されているとともに、前記アクチュエータから取り外し可能に構成されている、羽ばたき浮上移動装置。
【請求項2】
前記アクチュエータは、
前記制御部により制御される第1モータと、
前記第1モータから独立して前記制御部により制御される第2モータと、
前記第1モータにより直接的に駆動される第1被駆動部と、
前記第2モータにより直接的に駆動される第2被駆動部と、
前記第1被駆動部に対して回転可能に接続された第1中間部と、
前記第2被駆動部および前記第1中間部のそれぞれに対して回転可能に接続された第2中間部と含み、
前記羽部は、前記第1中間部および前記第2中間部のうちのいずれか一方の中間部に取り付け可能に構成されているとともに、前記一方の中間部から取り外し可能に構成されており、
前記制御部は、前記第1モータおよび前記第2モータに前記第1被駆動部および前記第2被駆動部を駆動させることにより、前記羽部がその根元部を中心軸とする往復回転運動およびその前縁部を中心軸とする捻り運動をするように、前記第1中間部および前記第2中間部の姿勢を変化させる、請求項1に記載の羽ばたき浮上移動装置。
【請求項3】
前記羽部は、その前縁部に沿って延びる折板構造を有し、
前記折板構造は、前記羽部の一方の主表面側においてのみ突出しており、
前記一方の主表面は、前記羽部の両主表面のうちの前記アクチュエータに接触している主表面の裏側の主表面である、請求項1または2に記載の羽ばたき浮上移動装置。
【請求項4】
前記羽部は、前記アクチュエータに接着剤により固定されている、請求項1〜3のいずれかに記載の羽ばたき浮上移動装置。
【請求項5】
前記アクチェータは、前記羽部の前記アクチュエータに対する位置を規定する位置決め用凸部を有しており、
前記位置決め用凸部は、前記折板構造によって形成される位置決め用溝に嵌まり込む、請求項1〜4のいずれかに記載の羽ばたき浮上移動装置。
【請求項6】
前記位置決め用凸部は、前記位置決め用溝に内接する形状を有している、請求項5に記載の羽ばたき浮上移動装置。
【請求項7】
前記アクチュエータは、前記羽部の根元部が挿入されるポケット部を有している、請求項1〜6のいずれかに記載の羽ばたき浮上移動装置。
【請求項8】
前記アクチュエータは、突出部を有し、
前記羽部の根元部は、前記突出部が嵌め込まれる凹部または貫通孔を有している、請求項1〜7のいずれかに記載の羽ばたき浮上移動装置。
【請求項9】
前記アクチュエータは、平面視においてU字を描く溝を有し、
前記突出部が、前記U字の内側の領域に設けられている、請求項8に記載の羽ばたき浮上移動装置。
【請求項10】
前記突出部は、前記羽部の根元部側から前記羽部の先端側へ窪む溝状の凹みを有し、
前記貫通孔の周辺の部分が前記溝状の凹みに嵌まり込む、請求項9に記載の羽ばたき浮上移動装置。
【請求項11】
前記U字を描く溝は、前記U字の下部が前記羽部の先端部に向かうように、かつ、前記U字の上部が前記羽部の根元部に向かうように設けられている、請求項9または10に記載の羽ばたき浮上移動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−292329(P2009−292329A)
【公開日】平成21年12月17日(2009.12.17)
【国際特許分類】
【出願番号】特願2008−148240(P2008−148240)
【出願日】平成20年6月5日(2008.6.5)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
【公開日】平成21年12月17日(2009.12.17)
【国際特許分類】
【出願日】平成20年6月5日(2008.6.5)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
[ Back to top ]