
羽ばたき飛行装置
【課題】フェザリング運動を利用することなく、簡単な構造で羽ばたき運動による低速飛行を可能にすることができ、安定した飛行ができる羽ばたき飛行装置を提供する。
【解決手段】胴部11と、胴部を軸にして羽ばたき運動を行う左右一対の主翼12とを備え、各主翼がシート状の翼面部材15と翼面部材の前縁を支持する翼骨部材14とを有する羽ばたき飛行装置であって、胴部に支持される動力源21と、動力源で発生した動力を翼骨部材に伝達して翼骨部材の振り下ろし動作および振り上げ動作を行わせる翼骨運動機構と、少なくとも振り下ろし動作時の翼面部材の形状、または、振り上げ動作時の翼面部材の形状のいずれかを能動的に変形させる翼面形状変形手段23,24とを備え、振り下ろしと振り上げの翼面形状を積極的に変化させて空気力を変化させる。
【解決手段】胴部11と、胴部を軸にして羽ばたき運動を行う左右一対の主翼12とを備え、各主翼がシート状の翼面部材15と翼面部材の前縁を支持する翼骨部材14とを有する羽ばたき飛行装置であって、胴部に支持される動力源21と、動力源で発生した動力を翼骨部材に伝達して翼骨部材の振り下ろし動作および振り上げ動作を行わせる翼骨運動機構と、少なくとも振り下ろし動作時の翼面部材の形状、または、振り上げ動作時の翼面部材の形状のいずれかを能動的に変形させる翼面形状変形手段23,24とを備え、振り下ろしと振り上げの翼面形状を積極的に変化させて空気力を変化させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主翼の振り下ろし動作と振り上げ動作とが繰り返される羽ばたき運動によって飛行する羽ばたき飛行装置に関する。
【背景技術】
【0002】
羽ばたき運動を利用して飛行する羽ばたき飛行装置は、ヘリコプタのような回転翼機とともに、低速飛行が可能な飛行装置として開発がなされており、たとえば飛行玩具として利用されている。
【0003】
低速飛行を行う羽ばたき飛行装置では、羽ばたき運動により推力を発生させるとともに、羽ばたき運動の振り下ろし動作および振り上げ動作によって発生する揚力をできるだけ大きくすることが求められている。
【0004】
揚力を得る一つの方法として、振り下ろし時の主翼のピッチ角と振り上げ時の主翼のピッチ角とを周期的に変更するフェザリング運動により、所望の揚力を得るようにすることが開示されている(特許文献1参照)。
【0005】
また、別の方法として、羽ばたき翼の後縁を非固定とするとともに、非固定にした羽ばたき翼の背骨部分にバネを設け、このバネの後端部に後縁高調節糸を結ぶようにし、羽ばたき翼を振り下ろすときは後縁高調節糸が張って翼面膜の上昇を制限し、羽ばたき翼を振り上げるときは空気の抵抗で翼面膜が一時的に下降するようにして、空気抵抗を逸らし、主翼スパーの振り上げを素早く行って機体降下を最小限に抑えるようにした羽ばたき飛行機が開示されている(特許文献2参照)。
【特許文献1】特開2005−119658号公報
【特許文献2】特開2002−85860号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
フェザリング運動を利用して揚力を生み出す飛行装置では、主翼(羽ばたき翼)による振り下ろし動作と振り上げ動作(一般にフラッピング運動ともいう)を行うとともに、フェザリング軸(例えば主翼スパーをフェザリング軸とする)の回りに、主翼をねじる運動を与える必要があり、どうしても構造が複雑になる。
【0007】
これに対し、特許文献2に記載されているような、主翼を支える背骨部分をバネ構造にして、振り下ろし動作時と振り上げ動作時の背骨の位置・形状を変化させるようにした構造の飛行装置では、フェザリング運動を利用しなくても、振り下ろし動作時と振り上げ動作時の主翼の形状が受動的に変化させられることにより、振り下ろし時の上昇力と振り上げ時の下降力とに差異が生じる結果、揚力が発生するようにしている。
この場合、簡単な構造で揚力を得ることができるが、横風等で背骨部分が左右に変形してしまうと主翼が左右非対称になり安定した飛行ができなくなるおそれがある。
【0008】
そこで、本発明は、フェザリング運動を利用することなく、簡単な構造で羽ばたき運動による低速飛行を可能にすることができ、安定した飛行ができる羽ばたき飛行装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するためになされた本発明の羽ばたき飛行装置は、胴部と、胴部を軸にして羽ばたき運動を行う左右一対の主翼とを備え、各主翼がシート状の翼面部材と翼面部材の前縁を支持する翼骨部材とを有する羽ばたき飛行装置であって、胴部に支持される動力源と、動力源で発生した動力を翼骨部材に伝達して翼骨部材の振り下ろし動作および振り上げ動作を行わせる翼骨運動機構と、少なくとも振り下ろし動作時の翼面部材の形状、または、振り上げ動作時の翼面部材の形状のいずれかを能動的に変形させる翼面形状変形手段とを備えるようにしている。
【0010】
すなわち、本発明によれば、翼面部材の形状を変化させる簡単な機構を設けて、振り下ろし動作時の翼面部材の形状と振り上げ動作時の翼面部材の形状とを、能動的に変化させる。ここで「能動的」とは、動力によって翼骨部材を振り下ろしたり、振り上げたりしたときに、空気の影響を受けて受動的に翼面形状が変化することを利用するものではなく、翼面部材に何らかの拘束力を働かせて変形することを意味する。
振り下ろし動作時の翼面部材の形状と振り上げ動作時の翼面部材の形状とを能動的に変化させることにより、振り下ろし動作時の翼面部材の形状と振り上げ動作時の翼面部材とを能動的に変化させることにより、振り下ろし動作時と振り上げ時の空気力が変化する。その結果、羽ばたき機の姿勢を制御する力を発生させることができる。
【発明の効果】
【0011】
本発明によれば、翼面部材の形状を能動的に変化させたことによりフェザリング運動を用いることなく、大きな揚力を発生させることができ、簡単な構造で羽ばたき飛行を安定して行うことができる。
【0012】
(他の課題を解決するための手段および効果)
上記発明において、翼面形状変形手段は、翼面部材を能動的に変形させる変形量を調整する変形量調整機構をさらに備えるようにしてもよい。
これにより、振り下ろし動作時または振り上げ動作時の翼面形状を調整することができ、飛行時の環境に応じて姿勢を制御するための空気力を調整することができる。
【0013】
上記発明において、ピッチ方向の角速度計と、ピッチ方向の角速度に応じて前記変形量調整機構を作動して翼面部材を能動的に変形させる変形量を調整する変形量制御部とを備えるようにしてもよい。
これにより、変形量制御部が、角速度計により求めたピッチ方向の角速度に応じて、翼面部材を能動的に変形させる変形量を調整して頭上げモーメント、頭下げモーメントを制御することができるので、ピッチ方向の姿勢を安定化させることができる。
【0014】
上記発明において、翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなるようにしてもよい。
ここで糸部材は、ほとんど変形しない非弾性糸であってもよいし、ゴム糸のような弾性糸であってもよい。好ましくは翼面部材に用いる材料が弾性を有するときには非弾性糸を用い、翼面部材に用いる材料が弾性を有しないときは弾性糸を用いるようにして、何らかの原因で大きな力が加わったときに翼面部材または糸の弾性力で吸収させることで衝撃を吸収するようにしてもよい。
これによれば、振り下ろし動作時に翼面中央付近が糸部材により引張られて翼面中央付近が上に凸となり、あるいは、振り上げ動作時に翼面中央付近が糸部材により引張られて翼面中央付近が下に凸となり、翼が発生する空気力を変化させることができる。
【0015】
上記発明において、翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなり、前記変形量調整機構は胴部に傾動自在に取り付けられた支点部材により構成され、前記糸部材の一端が左翼面、他端が右翼面の中央付近にそれぞれ固定されるとともに、支点部材が前記糸部材の中間付近を支え、支点部材の傾き角の調整により翼面中央の下降量または上昇量を制限するようにしてもよい。
これによれば、1つの変形量調整機構で、左右同時かつ均等に翼の形状を制限することができる。
【0016】
上記発明において、翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなり、前記変形量調整機構は、胴部にそれぞれ独立に傾動自在に取り付けられた左翼支点部材と右翼支点部材とにより構成され、前記糸部材は左翼面中央付近と左翼支点部材とを結ぶ左翼糸部材、および、右翼面中央付近と右翼支点部材とを結ぶ右翼糸部材とからなり、各支点部材の傾き角の調整により各翼面中央付近の下降量または上昇量を独立に制限するようにしてもよい。
これによれば、左右の翼の形状を独立に制限することができるので、飛行方向を調整することができるようになる。
【0017】
上記発明において、翼面形状変形手段は、振り下ろし動作時に、翼面を下方から押圧して翼面中央付近の下降を制限することにより翼面中央付近が上に凸となるように能動的に変形させる押圧部材、または、振り上げ動作時に翼面を上方から押圧して翼面中央付近の上昇を制限することにより翼面中央付近が下に凸となるように能動的に変形させる押圧部材からなるようにしてもよい。
これによれば、振り下ろし動作時に翼面中央付近が押圧部材に押し上げられて翼面中央付近が上に凸となり、あるいは振り上げ動作時に翼面中央付近が押圧部材により押し下げられて翼面中央付近が下に凸となり、翼が発生する空気力を変化させることができる。
【0018】
上記発明において、翼面形状変形手段は、胴部にそれぞれ独立に支持された左翼押圧部材と右翼押圧部材とにより構成され、各押圧部材は各翼面中央付近に接する高さが独立に調整できるよう構成されてもよい。
これによれば、押圧部材を用いた調整においても、左右の翼の形状を独立に制限することができるので、飛行方向を調整することができるようになる。
【0019】
上記発明において、翼面形状変形手段は、翼面に貼り付けられ翼面を能動的に変形させる圧電素子またはバイオメタルからなる翼変形素子と、翼骨部材の振り下ろし動作および振り上げ動作に同期して翼変形素子を作動して翼面形状を周期的に変形する翼変形素子制御部とからなるようにしてもよい。
これによれば、翼変形素子制御部が、翼骨部材の振り下ろし動作および振り上げ動作に同期して翼変形素子を作動して翼面形状を周期的に変形し、例えば、振り下ろし動作時に翼を上に凸にして強い上昇力を発生し、振り上げ動作時に解除して制御を解除することで空気力を変化させることができる。
【0020】
上記発明において、翼面形状変形手段は、左翼用の翼変形素子と右翼用の翼変形素子とが独立に設けられ、翼変形素子制御部は、左翼用の翼変形素子と右翼用の翼変形素子とを独立に制御するようにしてもよい。
これによれば、翼変形素子を用いた調整においても、左右の翼の形状を独立に制限することができるので、飛行方向を調整することができるようになる。
【0021】
上記発明において、翼面形状変形手段は、左右の主翼それぞれに対し左右の主翼が胴部に固定された位置の近傍を胴部に沿って前後に並ぶ複数の位置で、それぞれ下方に能動的に引張る糸部材からなるようにしてもよい。
これによれば、振り下ろし動作時あるいは振り上げ動作時に左右の主翼が胴部に固定された位置の近傍(主翼の付け根近傍部分)の張力を変化させることにより、翼が発生する空気力を変化させることができる。
【0022】
上記発明において、翼面形状変形手段は、左右の主翼それぞれに対し左右の主翼が胴部に固定された位置の近傍を胴部に沿って前後に並ぶ複数の位置で、それぞれ下方に能動的に引張る糸部材からなり、変形量調整機構は、胴部に沿って前後に並ぶ複数の位置で、胴部に傾動自在に取り付けられた支点部材およびローラにより構成され、前記糸部材は一端が胴部近傍の左翼面または胴部近傍の右翼面にそれぞれ固定されるとともに、他端がローラを介して支点部材に固定されるようにしてもよい。
これによれば、翼が発生する空気力を制御することができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施形態について、図面を用いて説明する。なお、以下に説明するいくつかの実施例は、一例にすぎず、本発明の要旨を逸脱しない範囲で変形実施することが可能である。
【0024】
(実施形態1)
最初に、糸を用いて翼面の移動を制限することにより、主翼形状を能動的に変形させる実施形態について説明する。
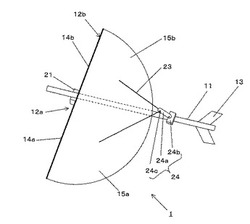
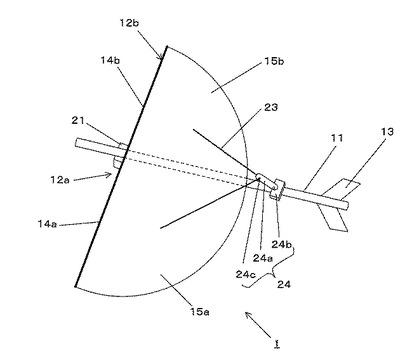
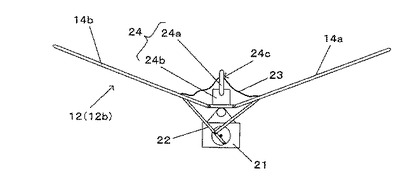
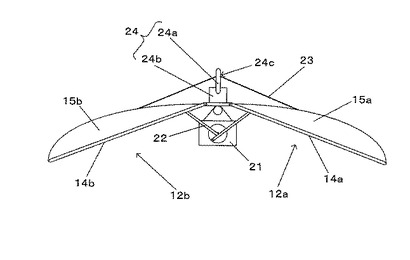
図1は本発明の一実施形態である羽ばたき飛行装置の構成を示す斜視図である。また、図2は機体前方から見た正面図である。
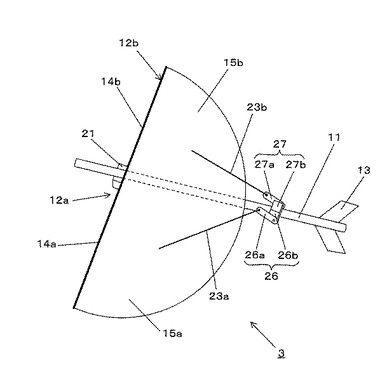
羽ばたき飛行装置1の構造は、主として胴部11と、主翼12(左翼12a、右翼12b)、尾翼13、小型モータ21(電池を含む)、リンク機構22、翼拘束糸23、糸調節機構24からなる。
【0025】
胴部11は棒状体からなり、主翼12(左翼12a、右翼12b)、尾翼13の他に、小型モータ21が取り付けられる。胴部11自体は強度を持たせるとともに軽量化を図るために木材、アルミ材が用いられる。
【0026】
主翼12は、胴部11を中心にして左右対称に延びる翼骨14(左翼骨14a、右翼骨14b)と、翼面15(左翼面15a、右翼面15b)とからなる。翼骨14は木材、アルミ材で形成される。翼面15は合成樹脂フィルムや紙等の変形可能なシート材で形成され、胴部11に接着剤で張り付けるようにしてある。翼面15の前縁は翼骨14で支持するようにしてある。一方、翼面15の後縁は自由に変形できるようにしてある。これにより、主翼12(左翼12a、右翼12b)の翼骨14を振り下ろしたり、振り上げたりして羽ばたき運動を行うと、翼面15の前縁側は翼骨15の動きに追随して上下に移動するが、翼面15の中央から後縁にかけては風圧の抵抗を受け、撓りながら追従することになる。
【0027】
尾翼13は、固定翼にするため、翼面の周囲を翼骨により支持するようにしてある。尾翼13は飛行姿勢を安定させるための補助翼として用いられる。
【0028】
小型モータ21は胴部11に支持され、羽ばたき運動の駆動装置として作用する。
リンク機構22は小型モータ21と翼骨14(14a、14b)との間を連結し、小型モータ21により発生した回転運動を、周知のリンク構造によって翼骨14の上下動に変換することにより、翼骨14の羽ばたき運動を起こさせる。
【0029】
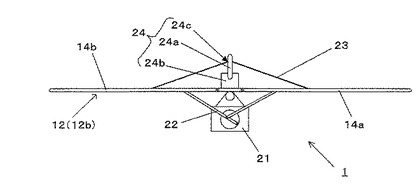
翼拘束糸23は、一端が左翼面15aの中央付近に固定され、他端が右翼面15bの中央付近に固定され、両翼を結ぶようにしてある。糸調節機構24は、アーム24aと、アーム24aを傾動させるモータ24bとからなり、アーム24aの先に設けた孔24cを、翼拘束糸23の中間部分が貫通するようにしてある。
アーム24aの傾動角を調整することにより、翼面15が振り下ろされたときに翼面の中央付近が翼拘束糸23によって引かれる結果、翼面形状が能動的に変形するようになる。
【0030】
そしてモータ24bを駆動して傾動角を変化させて、翼拘束糸23による翼面15(15a、15b)の拘束状態を変化させることで、振り下ろし動作の際に翼面15の下降できる限界を調整することにより、翼面形状が調整されるようにしてある。
【0031】
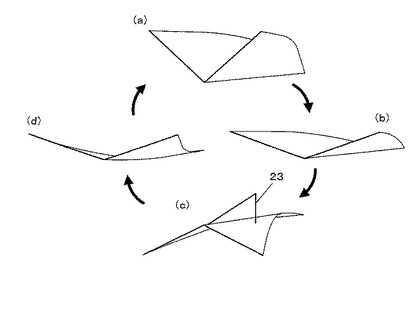
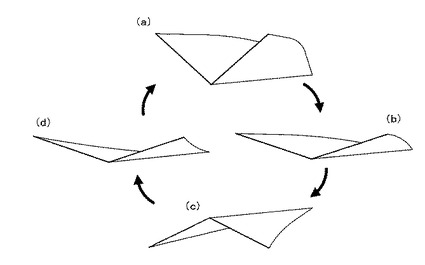
次に、飛行動作について説明する。図3は羽ばたき運動の1周期における主翼12(左翼12a、右翼12b)の状態を模式的に示した図である。
主翼12を最も振り上げた状態(図3(a))から、振り下ろして水平に近づけ(図3(b))、さらに振り下ろして最も振り下ろした状態(図3(c))になると、再び振り上げて水平に近づけ(図3(d))、さらに振り上げて最も振り上げた状態(図3(a))に戻ることで、1回の羽ばたき運動が完結する。この1回の羽ばたき動作のうちで図3(b)と図3(c)で示した状態の間で翼拘束糸23が主翼12の翼面15の拘束を始め、図3(c)と図3(d)で示した状態の間で翼拘束糸23が主翼12の翼面15の拘束を解除する。
【0032】
図4は主翼12を最も振り上げた状態(すなわち図3(a)の状態)ときの羽ばたき飛行装置10の正面図であり、図5は主翼12を最も振り下ろした状態(すなわち図3(c)の状態)ときの羽ばたき飛行装置10の正面図である。最も振り上げた状態(図3(a))のとき翼拘束糸23は緩んでおり、翼面15は羽ばたき運動によって自然に撓るだけの動きをしている。これに対し、最も振り下ろした状態(図3(c))のとき翼拘束糸23は翼面15を引張って翼面15が大きく上に凸になるように調整している。
この結果、翼が発生する空気力を変化させることができる。
【0033】
比較のため、図6に翼拘束糸23を用いないで羽ばたき運動を行ったときの主翼の状態を示す。図6(a)は最も振り上げた状態、図6(c)は最も振り下ろした状態である。
図3(a)と図6(a)とではほとんど同じである。図3(c)と図6(c)とを比較すると、図6(c)では翼拘束糸によって翼面15の下降が制限されていないためあまり撓っていない。
図3と図6との比較により、翼拘束糸23によって振り下ろし動作時での翼面15の下降が制限されて大きく撓らせることができ、これにより、空気力を変化させることができる。
【0034】
なお、飛行中に風の影響等を受ける場合のように、空気力を調整する必要があるときは、糸調節機構24を作動して、翼拘束糸23の引張り具合を調整することができる。
また、本実施形態では翼拘束糸23によって振り下ろし動作時での翼面15の下降が制限されて大きく撓らせたが、振り上げ動作時での翼面15の上昇を制限するようにした場合も同様に、空気力を変化させることができる。
【0035】
(実施形態2)
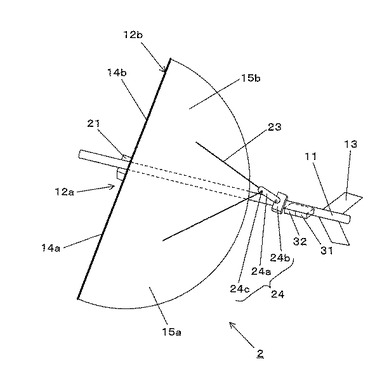
図7は本発明の第二実施形態である羽ばたき飛行装置2の構成を示す斜視図である。
図1で説明した羽ばたき飛行装置1と同様の部分については同符号を付すことにより、説明の一部を省略する。
本実施形態では、図1で説明した羽ばたき飛行装置10の胴部11に角速度センサ31と角速度センサ31からの角速度信号に基づいて糸調節機構24を作動して、翼拘束糸23の引張り具合を調整する制御機器32とが搭載されている。制御機器32はマイコンからなり、角速度信号に基づいて機体のピッチ角の変位を測定し、それに応じて羽ばたき運動を調整することでピッチ角が一定になるようにフィードバック制御を行う。これにより、ピッチ角が大きく変化しないように頭上げモーメント、あるいは頭下げモーメントを発生することができ、安定した飛行を行わせることができる。
【0036】
(実施形態3)
図8は本発明の第三実施形態である羽ばたき飛行装置3の構成を示す斜視図である。本実施形態では、図1で説明した羽ばたき飛行装置10の胴部11に設けた翼拘束糸23および糸調節機構24を、左右それぞれ独立にし、左翼拘束糸23a,右翼拘束糸23b、左翼糸調節機構26、右翼糸調節機構27にする。
これにより、左翼12aと右翼12bとが独立に揚力を調整することができるようになり、左旋回、右旋回などの飛行方向の制御を加えることができるようになる。
【0037】
(実施形態4)
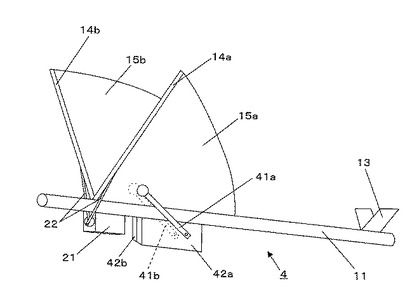
図9は本発明の第四実施形態である羽ばたき飛行装置4の構成を示す斜視図である。本実施形態では、図1で説明した翼拘束糸23、糸調節機構24に代えて、押圧アーム41(左アーム41a、右アーム41b)を傾動させるアーム傾動機構42(左アーム傾動機構42a、右アーム傾動機構42b)が胴部11に取り付けられている。
そして、アーム傾動機構42(左アーム傾動機構42a、右アーム傾動機構42b)により、翼面15が振り下ろされたときに翼面15の中央付近が押圧アーム41(左アーム41a、右アーム41b)に接する高さを調整して翼面15が下降できる限界を適切にしておくことで、振り下ろし動作のときに翼面15中央付近が能動的に変形するようにする。
【0038】
そしてアーム傾動機構42を駆動して傾動角を変化させて、押圧アーム41による拘束状態を変化させることで、振り下ろし動作の際に翼面15の中央付近の下降量が制限され、翼面形状が調整されるようにしてある。
これにより、図3で説明した実施形態と同様に、羽ばたき動作の1周期のうち、振り下ろし動作の途中で押圧アーム41が主翼12の翼面15の拘束を始め、振り上げ動作の途中で翼面15の拘束を解除する。なお、本実施形態においても左右の押圧アーム41を独立に制御してもよい。
また、振り上げ動作のときに翼面15の中央付近の上昇量が制限されるようにして翼面15中央付近が能動的に変形するようにしてもよい。
【0039】
(実施形態5)
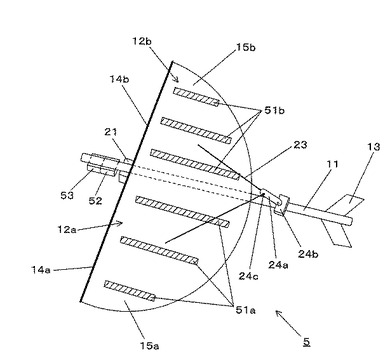
図10は本発明の第五実施形態である羽ばたき飛行装置5の構成を示す斜視図である。本実施形態では、図1で説明した翼拘束糸23、糸調節機構24に代えて、翼面15を機械的に歪ませて変形を与える圧電素子51(翼変形素子)と、リンク機構22の回転状態を検出して主翼12の振り下ろし動作および振り上げ動作を検出するセンサ52と、センサ52からの信号に基づいて振り下ろし動作および振り上げ動作に同期させて圧電素子51を作動し翼面形状を周期的に変形する翼変形素子制御部53とが胴部11に取り付けられている。なお、圧電素子51に代えてバイオメタルを用いてもよい。またセンサ52は直接主翼12の翼骨14の動きを検出してもよい。
翼変形素子制御部52は、マイコンからなり、図3で説明した実施形態と同様に、羽ばたき動作の1周期のうち、振り下ろし動作の途中で圧電素子51が主翼12の翼面15の能動的な変形を始め、振り上げ動作の途中で翼面15の能動的な変形を解除する。
これにより、空気力を変化させることができる。なお、本実施形態においても左右の圧電素子51を独立に制御してもよい。また、羽ばたきに同期させずに圧電素子を作動させてもよい。
【0040】
(実施形態6)
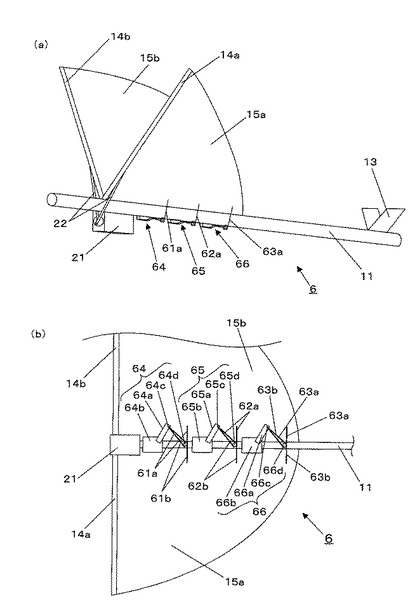
図11は本発明の第六実施形態である羽ばたき飛行装置6の構成を示す図であり、図11(a)はその斜視図、図11(b)はその底面側から見た要部拡大図である。
本実施形態では、図1で説明した翼拘束糸23、糸調節機構24に代えて、前から、翼拘束糸61(左翼拘束糸61a,右翼拘束糸61b)、翼拘束糸62(左翼拘束糸62a,右翼拘束糸62b)、翼拘束糸63(左翼拘束糸63a,右翼拘束糸63b)が、この順で翼面15a,15bに固定され、また、糸調節機構64(アーム64a,モータ64b、孔64c,ローラ64d)、糸調節機構65(アーム65a,モータ65b、孔65c,ローラ65d)、糸調節機構66(アーム66a,モータ66b、孔66c,ローラ66d)がこの順で胴部11に支持されている。
【0041】
左翼拘束糸61aは、一端が左翼面15aに固定され、他端が糸の方向を変えるためのローラ64dを介してアーム64aの孔64cに結ばれている。同様に、右翼拘束糸61bは、一端が右翼面15bに固定され、他端が糸の方向を変えるためのローラ64dを介してアーム64aの孔64cに結ばれている。ローラ64dは左翼拘束糸用と右翼拘束糸用との一対のローラが同軸状に取り付けてあり、それぞれが逆方向に回転できるようにしてある。なお、摩擦を小さくした円筒側面を有する丸棒体をローラ64として取り付け、各糸が円筒側面上を滑るようにしてもよい。
同様に、左翼拘束糸62aは、一端が左翼面15aに固定され、他端がローラ65dを介してアーム65aの孔65cに結ばれている。右翼拘束糸62bは、一端が右翼面15bに固定され、他端がローラ65dを介してアーム65aの孔65cに結ばれている。
同様に、左翼拘束糸63aは、一端が左翼面15aに固定され、他端がローラ66dを介してアーム66aの孔66cに結ばれている。右翼拘束糸63bは、一端が右翼面15bに固定され、他端がローラ66dを介してアーム66aの孔66cに結ばれている。
【0042】
アーム64a,65a,66aの傾動角を調整することにより、翼拘束糸61、62、63の張力を独立に変化させることができ、これにより胴部11に取り付けられた位置近傍の翼面15の翼形状が変形されるようにしてある。
これにより、空気力を変化させることができる。なお、本実施形態においても左右の翼抑制糸を独立に制御してもよい。その場合は左右の主翼ごとに糸調節機構を設けることになる。
【産業上の利用可能性】
【0043】
本発明は、羽ばたき動作により低速で飛行を行う羽ばたき飛行装置に利用することができ、具体的には飛行玩具、あるいはセンサや軽量カメラを搭載した監視用飛行装置として利用することができる。
【図面の簡単な説明】
【0044】
【図1】本発明の一実施形態であるはばたき飛行装置の斜視図。
【図2】図1の羽ばたき飛行装置の正面図。
【図3】羽ばたき運動の1周期における主翼12(左翼12a、右翼12b)の状態を模式的に示した図(拘束を与えた場合)。
【図4】主翼12を最も振り上げた状態ときの羽ばたき飛行装置の正面図。
【図5】主翼12を最も振り下げた状態ときの羽ばたき飛行装置の正面図。
【図6】羽ばたき運動の1周期における主翼12(左翼12a、右翼12b)の状態を模式的に示した図(拘束を与えない場合)。
【図7】本発明の第二実施形態である羽ばたき飛行装置2の構成を示す斜視図。
【図8】本発明の第三実施形態である羽ばたき飛行装置3の構成を示す斜視図。
【図9】本発明の第四実施形態である羽ばたき飛行装置4の構成を示す斜視図。
【図10】本発明の第五実施形態である羽ばたき飛行装置5の構成を示す斜視図。
【図11】本発明の第六実施形態である羽ばたき飛行装置5の構成を示す斜視図および底面図。
【符号の説明】
【0045】
1〜5: 羽ばたき飛行装置
11: 胴部
12(12a、12b): 主翼(左翼、右翼)
13: 尾翼
14(14a、14b): 翼骨(左翼骨、右翼骨)
15(15a、15b): 翼面(左翼面、右翼面)
23、23a、23b: 翼拘束糸、左翼拘束糸、右翼拘束糸
24、24a、24b: 糸調節機構、左翼糸調節機構、右翼糸調節機構
31: 角速度センサ
32: 制御機器
41(41a、41b): 押圧アーム(左押圧アーム、右押圧アーム)
42(42a、42b): 押圧アーム傾動機構(左押圧アーム傾動機構、右押圧アーム傾動機構)
51: 圧電素子
52: センサ
53: 翼変形素子制御部
61〜63(61a〜63a、61b〜63b): 翼拘束糸、左翼拘束糸、右翼拘束糸
64〜66: 糸調節機構
【技術分野】
【0001】
本発明は、主翼の振り下ろし動作と振り上げ動作とが繰り返される羽ばたき運動によって飛行する羽ばたき飛行装置に関する。
【背景技術】
【0002】
羽ばたき運動を利用して飛行する羽ばたき飛行装置は、ヘリコプタのような回転翼機とともに、低速飛行が可能な飛行装置として開発がなされており、たとえば飛行玩具として利用されている。
【0003】
低速飛行を行う羽ばたき飛行装置では、羽ばたき運動により推力を発生させるとともに、羽ばたき運動の振り下ろし動作および振り上げ動作によって発生する揚力をできるだけ大きくすることが求められている。
【0004】
揚力を得る一つの方法として、振り下ろし時の主翼のピッチ角と振り上げ時の主翼のピッチ角とを周期的に変更するフェザリング運動により、所望の揚力を得るようにすることが開示されている(特許文献1参照)。
【0005】
また、別の方法として、羽ばたき翼の後縁を非固定とするとともに、非固定にした羽ばたき翼の背骨部分にバネを設け、このバネの後端部に後縁高調節糸を結ぶようにし、羽ばたき翼を振り下ろすときは後縁高調節糸が張って翼面膜の上昇を制限し、羽ばたき翼を振り上げるときは空気の抵抗で翼面膜が一時的に下降するようにして、空気抵抗を逸らし、主翼スパーの振り上げを素早く行って機体降下を最小限に抑えるようにした羽ばたき飛行機が開示されている(特許文献2参照)。
【特許文献1】特開2005−119658号公報
【特許文献2】特開2002−85860号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
フェザリング運動を利用して揚力を生み出す飛行装置では、主翼(羽ばたき翼)による振り下ろし動作と振り上げ動作(一般にフラッピング運動ともいう)を行うとともに、フェザリング軸(例えば主翼スパーをフェザリング軸とする)の回りに、主翼をねじる運動を与える必要があり、どうしても構造が複雑になる。
【0007】
これに対し、特許文献2に記載されているような、主翼を支える背骨部分をバネ構造にして、振り下ろし動作時と振り上げ動作時の背骨の位置・形状を変化させるようにした構造の飛行装置では、フェザリング運動を利用しなくても、振り下ろし動作時と振り上げ動作時の主翼の形状が受動的に変化させられることにより、振り下ろし時の上昇力と振り上げ時の下降力とに差異が生じる結果、揚力が発生するようにしている。
この場合、簡単な構造で揚力を得ることができるが、横風等で背骨部分が左右に変形してしまうと主翼が左右非対称になり安定した飛行ができなくなるおそれがある。
【0008】
そこで、本発明は、フェザリング運動を利用することなく、簡単な構造で羽ばたき運動による低速飛行を可能にすることができ、安定した飛行ができる羽ばたき飛行装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するためになされた本発明の羽ばたき飛行装置は、胴部と、胴部を軸にして羽ばたき運動を行う左右一対の主翼とを備え、各主翼がシート状の翼面部材と翼面部材の前縁を支持する翼骨部材とを有する羽ばたき飛行装置であって、胴部に支持される動力源と、動力源で発生した動力を翼骨部材に伝達して翼骨部材の振り下ろし動作および振り上げ動作を行わせる翼骨運動機構と、少なくとも振り下ろし動作時の翼面部材の形状、または、振り上げ動作時の翼面部材の形状のいずれかを能動的に変形させる翼面形状変形手段とを備えるようにしている。
【0010】
すなわち、本発明によれば、翼面部材の形状を変化させる簡単な機構を設けて、振り下ろし動作時の翼面部材の形状と振り上げ動作時の翼面部材の形状とを、能動的に変化させる。ここで「能動的」とは、動力によって翼骨部材を振り下ろしたり、振り上げたりしたときに、空気の影響を受けて受動的に翼面形状が変化することを利用するものではなく、翼面部材に何らかの拘束力を働かせて変形することを意味する。
振り下ろし動作時の翼面部材の形状と振り上げ動作時の翼面部材の形状とを能動的に変化させることにより、振り下ろし動作時の翼面部材の形状と振り上げ動作時の翼面部材とを能動的に変化させることにより、振り下ろし動作時と振り上げ時の空気力が変化する。その結果、羽ばたき機の姿勢を制御する力を発生させることができる。
【発明の効果】
【0011】
本発明によれば、翼面部材の形状を能動的に変化させたことによりフェザリング運動を用いることなく、大きな揚力を発生させることができ、簡単な構造で羽ばたき飛行を安定して行うことができる。
【0012】
(他の課題を解決するための手段および効果)
上記発明において、翼面形状変形手段は、翼面部材を能動的に変形させる変形量を調整する変形量調整機構をさらに備えるようにしてもよい。
これにより、振り下ろし動作時または振り上げ動作時の翼面形状を調整することができ、飛行時の環境に応じて姿勢を制御するための空気力を調整することができる。
【0013】
上記発明において、ピッチ方向の角速度計と、ピッチ方向の角速度に応じて前記変形量調整機構を作動して翼面部材を能動的に変形させる変形量を調整する変形量制御部とを備えるようにしてもよい。
これにより、変形量制御部が、角速度計により求めたピッチ方向の角速度に応じて、翼面部材を能動的に変形させる変形量を調整して頭上げモーメント、頭下げモーメントを制御することができるので、ピッチ方向の姿勢を安定化させることができる。
【0014】
上記発明において、翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなるようにしてもよい。
ここで糸部材は、ほとんど変形しない非弾性糸であってもよいし、ゴム糸のような弾性糸であってもよい。好ましくは翼面部材に用いる材料が弾性を有するときには非弾性糸を用い、翼面部材に用いる材料が弾性を有しないときは弾性糸を用いるようにして、何らかの原因で大きな力が加わったときに翼面部材または糸の弾性力で吸収させることで衝撃を吸収するようにしてもよい。
これによれば、振り下ろし動作時に翼面中央付近が糸部材により引張られて翼面中央付近が上に凸となり、あるいは、振り上げ動作時に翼面中央付近が糸部材により引張られて翼面中央付近が下に凸となり、翼が発生する空気力を変化させることができる。
【0015】
上記発明において、翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなり、前記変形量調整機構は胴部に傾動自在に取り付けられた支点部材により構成され、前記糸部材の一端が左翼面、他端が右翼面の中央付近にそれぞれ固定されるとともに、支点部材が前記糸部材の中間付近を支え、支点部材の傾き角の調整により翼面中央の下降量または上昇量を制限するようにしてもよい。
これによれば、1つの変形量調整機構で、左右同時かつ均等に翼の形状を制限することができる。
【0016】
上記発明において、翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなり、前記変形量調整機構は、胴部にそれぞれ独立に傾動自在に取り付けられた左翼支点部材と右翼支点部材とにより構成され、前記糸部材は左翼面中央付近と左翼支点部材とを結ぶ左翼糸部材、および、右翼面中央付近と右翼支点部材とを結ぶ右翼糸部材とからなり、各支点部材の傾き角の調整により各翼面中央付近の下降量または上昇量を独立に制限するようにしてもよい。
これによれば、左右の翼の形状を独立に制限することができるので、飛行方向を調整することができるようになる。
【0017】
上記発明において、翼面形状変形手段は、振り下ろし動作時に、翼面を下方から押圧して翼面中央付近の下降を制限することにより翼面中央付近が上に凸となるように能動的に変形させる押圧部材、または、振り上げ動作時に翼面を上方から押圧して翼面中央付近の上昇を制限することにより翼面中央付近が下に凸となるように能動的に変形させる押圧部材からなるようにしてもよい。
これによれば、振り下ろし動作時に翼面中央付近が押圧部材に押し上げられて翼面中央付近が上に凸となり、あるいは振り上げ動作時に翼面中央付近が押圧部材により押し下げられて翼面中央付近が下に凸となり、翼が発生する空気力を変化させることができる。
【0018】
上記発明において、翼面形状変形手段は、胴部にそれぞれ独立に支持された左翼押圧部材と右翼押圧部材とにより構成され、各押圧部材は各翼面中央付近に接する高さが独立に調整できるよう構成されてもよい。
これによれば、押圧部材を用いた調整においても、左右の翼の形状を独立に制限することができるので、飛行方向を調整することができるようになる。
【0019】
上記発明において、翼面形状変形手段は、翼面に貼り付けられ翼面を能動的に変形させる圧電素子またはバイオメタルからなる翼変形素子と、翼骨部材の振り下ろし動作および振り上げ動作に同期して翼変形素子を作動して翼面形状を周期的に変形する翼変形素子制御部とからなるようにしてもよい。
これによれば、翼変形素子制御部が、翼骨部材の振り下ろし動作および振り上げ動作に同期して翼変形素子を作動して翼面形状を周期的に変形し、例えば、振り下ろし動作時に翼を上に凸にして強い上昇力を発生し、振り上げ動作時に解除して制御を解除することで空気力を変化させることができる。
【0020】
上記発明において、翼面形状変形手段は、左翼用の翼変形素子と右翼用の翼変形素子とが独立に設けられ、翼変形素子制御部は、左翼用の翼変形素子と右翼用の翼変形素子とを独立に制御するようにしてもよい。
これによれば、翼変形素子を用いた調整においても、左右の翼の形状を独立に制限することができるので、飛行方向を調整することができるようになる。
【0021】
上記発明において、翼面形状変形手段は、左右の主翼それぞれに対し左右の主翼が胴部に固定された位置の近傍を胴部に沿って前後に並ぶ複数の位置で、それぞれ下方に能動的に引張る糸部材からなるようにしてもよい。
これによれば、振り下ろし動作時あるいは振り上げ動作時に左右の主翼が胴部に固定された位置の近傍(主翼の付け根近傍部分)の張力を変化させることにより、翼が発生する空気力を変化させることができる。
【0022】
上記発明において、翼面形状変形手段は、左右の主翼それぞれに対し左右の主翼が胴部に固定された位置の近傍を胴部に沿って前後に並ぶ複数の位置で、それぞれ下方に能動的に引張る糸部材からなり、変形量調整機構は、胴部に沿って前後に並ぶ複数の位置で、胴部に傾動自在に取り付けられた支点部材およびローラにより構成され、前記糸部材は一端が胴部近傍の左翼面または胴部近傍の右翼面にそれぞれ固定されるとともに、他端がローラを介して支点部材に固定されるようにしてもよい。
これによれば、翼が発生する空気力を制御することができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施形態について、図面を用いて説明する。なお、以下に説明するいくつかの実施例は、一例にすぎず、本発明の要旨を逸脱しない範囲で変形実施することが可能である。
【0024】
(実施形態1)
最初に、糸を用いて翼面の移動を制限することにより、主翼形状を能動的に変形させる実施形態について説明する。
図1は本発明の一実施形態である羽ばたき飛行装置の構成を示す斜視図である。また、図2は機体前方から見た正面図である。
羽ばたき飛行装置1の構造は、主として胴部11と、主翼12(左翼12a、右翼12b)、尾翼13、小型モータ21(電池を含む)、リンク機構22、翼拘束糸23、糸調節機構24からなる。
【0025】
胴部11は棒状体からなり、主翼12(左翼12a、右翼12b)、尾翼13の他に、小型モータ21が取り付けられる。胴部11自体は強度を持たせるとともに軽量化を図るために木材、アルミ材が用いられる。
【0026】
主翼12は、胴部11を中心にして左右対称に延びる翼骨14(左翼骨14a、右翼骨14b)と、翼面15(左翼面15a、右翼面15b)とからなる。翼骨14は木材、アルミ材で形成される。翼面15は合成樹脂フィルムや紙等の変形可能なシート材で形成され、胴部11に接着剤で張り付けるようにしてある。翼面15の前縁は翼骨14で支持するようにしてある。一方、翼面15の後縁は自由に変形できるようにしてある。これにより、主翼12(左翼12a、右翼12b)の翼骨14を振り下ろしたり、振り上げたりして羽ばたき運動を行うと、翼面15の前縁側は翼骨15の動きに追随して上下に移動するが、翼面15の中央から後縁にかけては風圧の抵抗を受け、撓りながら追従することになる。
【0027】
尾翼13は、固定翼にするため、翼面の周囲を翼骨により支持するようにしてある。尾翼13は飛行姿勢を安定させるための補助翼として用いられる。
【0028】
小型モータ21は胴部11に支持され、羽ばたき運動の駆動装置として作用する。
リンク機構22は小型モータ21と翼骨14(14a、14b)との間を連結し、小型モータ21により発生した回転運動を、周知のリンク構造によって翼骨14の上下動に変換することにより、翼骨14の羽ばたき運動を起こさせる。
【0029】
翼拘束糸23は、一端が左翼面15aの中央付近に固定され、他端が右翼面15bの中央付近に固定され、両翼を結ぶようにしてある。糸調節機構24は、アーム24aと、アーム24aを傾動させるモータ24bとからなり、アーム24aの先に設けた孔24cを、翼拘束糸23の中間部分が貫通するようにしてある。
アーム24aの傾動角を調整することにより、翼面15が振り下ろされたときに翼面の中央付近が翼拘束糸23によって引かれる結果、翼面形状が能動的に変形するようになる。
【0030】
そしてモータ24bを駆動して傾動角を変化させて、翼拘束糸23による翼面15(15a、15b)の拘束状態を変化させることで、振り下ろし動作の際に翼面15の下降できる限界を調整することにより、翼面形状が調整されるようにしてある。
【0031】
次に、飛行動作について説明する。図3は羽ばたき運動の1周期における主翼12(左翼12a、右翼12b)の状態を模式的に示した図である。
主翼12を最も振り上げた状態(図3(a))から、振り下ろして水平に近づけ(図3(b))、さらに振り下ろして最も振り下ろした状態(図3(c))になると、再び振り上げて水平に近づけ(図3(d))、さらに振り上げて最も振り上げた状態(図3(a))に戻ることで、1回の羽ばたき運動が完結する。この1回の羽ばたき動作のうちで図3(b)と図3(c)で示した状態の間で翼拘束糸23が主翼12の翼面15の拘束を始め、図3(c)と図3(d)で示した状態の間で翼拘束糸23が主翼12の翼面15の拘束を解除する。
【0032】
図4は主翼12を最も振り上げた状態(すなわち図3(a)の状態)ときの羽ばたき飛行装置10の正面図であり、図5は主翼12を最も振り下ろした状態(すなわち図3(c)の状態)ときの羽ばたき飛行装置10の正面図である。最も振り上げた状態(図3(a))のとき翼拘束糸23は緩んでおり、翼面15は羽ばたき運動によって自然に撓るだけの動きをしている。これに対し、最も振り下ろした状態(図3(c))のとき翼拘束糸23は翼面15を引張って翼面15が大きく上に凸になるように調整している。
この結果、翼が発生する空気力を変化させることができる。
【0033】
比較のため、図6に翼拘束糸23を用いないで羽ばたき運動を行ったときの主翼の状態を示す。図6(a)は最も振り上げた状態、図6(c)は最も振り下ろした状態である。
図3(a)と図6(a)とではほとんど同じである。図3(c)と図6(c)とを比較すると、図6(c)では翼拘束糸によって翼面15の下降が制限されていないためあまり撓っていない。
図3と図6との比較により、翼拘束糸23によって振り下ろし動作時での翼面15の下降が制限されて大きく撓らせることができ、これにより、空気力を変化させることができる。
【0034】
なお、飛行中に風の影響等を受ける場合のように、空気力を調整する必要があるときは、糸調節機構24を作動して、翼拘束糸23の引張り具合を調整することができる。
また、本実施形態では翼拘束糸23によって振り下ろし動作時での翼面15の下降が制限されて大きく撓らせたが、振り上げ動作時での翼面15の上昇を制限するようにした場合も同様に、空気力を変化させることができる。
【0035】
(実施形態2)
図7は本発明の第二実施形態である羽ばたき飛行装置2の構成を示す斜視図である。
図1で説明した羽ばたき飛行装置1と同様の部分については同符号を付すことにより、説明の一部を省略する。
本実施形態では、図1で説明した羽ばたき飛行装置10の胴部11に角速度センサ31と角速度センサ31からの角速度信号に基づいて糸調節機構24を作動して、翼拘束糸23の引張り具合を調整する制御機器32とが搭載されている。制御機器32はマイコンからなり、角速度信号に基づいて機体のピッチ角の変位を測定し、それに応じて羽ばたき運動を調整することでピッチ角が一定になるようにフィードバック制御を行う。これにより、ピッチ角が大きく変化しないように頭上げモーメント、あるいは頭下げモーメントを発生することができ、安定した飛行を行わせることができる。
【0036】
(実施形態3)
図8は本発明の第三実施形態である羽ばたき飛行装置3の構成を示す斜視図である。本実施形態では、図1で説明した羽ばたき飛行装置10の胴部11に設けた翼拘束糸23および糸調節機構24を、左右それぞれ独立にし、左翼拘束糸23a,右翼拘束糸23b、左翼糸調節機構26、右翼糸調節機構27にする。
これにより、左翼12aと右翼12bとが独立に揚力を調整することができるようになり、左旋回、右旋回などの飛行方向の制御を加えることができるようになる。
【0037】
(実施形態4)
図9は本発明の第四実施形態である羽ばたき飛行装置4の構成を示す斜視図である。本実施形態では、図1で説明した翼拘束糸23、糸調節機構24に代えて、押圧アーム41(左アーム41a、右アーム41b)を傾動させるアーム傾動機構42(左アーム傾動機構42a、右アーム傾動機構42b)が胴部11に取り付けられている。
そして、アーム傾動機構42(左アーム傾動機構42a、右アーム傾動機構42b)により、翼面15が振り下ろされたときに翼面15の中央付近が押圧アーム41(左アーム41a、右アーム41b)に接する高さを調整して翼面15が下降できる限界を適切にしておくことで、振り下ろし動作のときに翼面15中央付近が能動的に変形するようにする。
【0038】
そしてアーム傾動機構42を駆動して傾動角を変化させて、押圧アーム41による拘束状態を変化させることで、振り下ろし動作の際に翼面15の中央付近の下降量が制限され、翼面形状が調整されるようにしてある。
これにより、図3で説明した実施形態と同様に、羽ばたき動作の1周期のうち、振り下ろし動作の途中で押圧アーム41が主翼12の翼面15の拘束を始め、振り上げ動作の途中で翼面15の拘束を解除する。なお、本実施形態においても左右の押圧アーム41を独立に制御してもよい。
また、振り上げ動作のときに翼面15の中央付近の上昇量が制限されるようにして翼面15中央付近が能動的に変形するようにしてもよい。
【0039】
(実施形態5)
図10は本発明の第五実施形態である羽ばたき飛行装置5の構成を示す斜視図である。本実施形態では、図1で説明した翼拘束糸23、糸調節機構24に代えて、翼面15を機械的に歪ませて変形を与える圧電素子51(翼変形素子)と、リンク機構22の回転状態を検出して主翼12の振り下ろし動作および振り上げ動作を検出するセンサ52と、センサ52からの信号に基づいて振り下ろし動作および振り上げ動作に同期させて圧電素子51を作動し翼面形状を周期的に変形する翼変形素子制御部53とが胴部11に取り付けられている。なお、圧電素子51に代えてバイオメタルを用いてもよい。またセンサ52は直接主翼12の翼骨14の動きを検出してもよい。
翼変形素子制御部52は、マイコンからなり、図3で説明した実施形態と同様に、羽ばたき動作の1周期のうち、振り下ろし動作の途中で圧電素子51が主翼12の翼面15の能動的な変形を始め、振り上げ動作の途中で翼面15の能動的な変形を解除する。
これにより、空気力を変化させることができる。なお、本実施形態においても左右の圧電素子51を独立に制御してもよい。また、羽ばたきに同期させずに圧電素子を作動させてもよい。
【0040】
(実施形態6)
図11は本発明の第六実施形態である羽ばたき飛行装置6の構成を示す図であり、図11(a)はその斜視図、図11(b)はその底面側から見た要部拡大図である。
本実施形態では、図1で説明した翼拘束糸23、糸調節機構24に代えて、前から、翼拘束糸61(左翼拘束糸61a,右翼拘束糸61b)、翼拘束糸62(左翼拘束糸62a,右翼拘束糸62b)、翼拘束糸63(左翼拘束糸63a,右翼拘束糸63b)が、この順で翼面15a,15bに固定され、また、糸調節機構64(アーム64a,モータ64b、孔64c,ローラ64d)、糸調節機構65(アーム65a,モータ65b、孔65c,ローラ65d)、糸調節機構66(アーム66a,モータ66b、孔66c,ローラ66d)がこの順で胴部11に支持されている。
【0041】
左翼拘束糸61aは、一端が左翼面15aに固定され、他端が糸の方向を変えるためのローラ64dを介してアーム64aの孔64cに結ばれている。同様に、右翼拘束糸61bは、一端が右翼面15bに固定され、他端が糸の方向を変えるためのローラ64dを介してアーム64aの孔64cに結ばれている。ローラ64dは左翼拘束糸用と右翼拘束糸用との一対のローラが同軸状に取り付けてあり、それぞれが逆方向に回転できるようにしてある。なお、摩擦を小さくした円筒側面を有する丸棒体をローラ64として取り付け、各糸が円筒側面上を滑るようにしてもよい。
同様に、左翼拘束糸62aは、一端が左翼面15aに固定され、他端がローラ65dを介してアーム65aの孔65cに結ばれている。右翼拘束糸62bは、一端が右翼面15bに固定され、他端がローラ65dを介してアーム65aの孔65cに結ばれている。
同様に、左翼拘束糸63aは、一端が左翼面15aに固定され、他端がローラ66dを介してアーム66aの孔66cに結ばれている。右翼拘束糸63bは、一端が右翼面15bに固定され、他端がローラ66dを介してアーム66aの孔66cに結ばれている。
【0042】
アーム64a,65a,66aの傾動角を調整することにより、翼拘束糸61、62、63の張力を独立に変化させることができ、これにより胴部11に取り付けられた位置近傍の翼面15の翼形状が変形されるようにしてある。
これにより、空気力を変化させることができる。なお、本実施形態においても左右の翼抑制糸を独立に制御してもよい。その場合は左右の主翼ごとに糸調節機構を設けることになる。
【産業上の利用可能性】
【0043】
本発明は、羽ばたき動作により低速で飛行を行う羽ばたき飛行装置に利用することができ、具体的には飛行玩具、あるいはセンサや軽量カメラを搭載した監視用飛行装置として利用することができる。
【図面の簡単な説明】
【0044】
【図1】本発明の一実施形態であるはばたき飛行装置の斜視図。
【図2】図1の羽ばたき飛行装置の正面図。
【図3】羽ばたき運動の1周期における主翼12(左翼12a、右翼12b)の状態を模式的に示した図(拘束を与えた場合)。
【図4】主翼12を最も振り上げた状態ときの羽ばたき飛行装置の正面図。
【図5】主翼12を最も振り下げた状態ときの羽ばたき飛行装置の正面図。
【図6】羽ばたき運動の1周期における主翼12(左翼12a、右翼12b)の状態を模式的に示した図(拘束を与えない場合)。
【図7】本発明の第二実施形態である羽ばたき飛行装置2の構成を示す斜視図。
【図8】本発明の第三実施形態である羽ばたき飛行装置3の構成を示す斜視図。
【図9】本発明の第四実施形態である羽ばたき飛行装置4の構成を示す斜視図。
【図10】本発明の第五実施形態である羽ばたき飛行装置5の構成を示す斜視図。
【図11】本発明の第六実施形態である羽ばたき飛行装置5の構成を示す斜視図および底面図。
【符号の説明】
【0045】
1〜5: 羽ばたき飛行装置
11: 胴部
12(12a、12b): 主翼(左翼、右翼)
13: 尾翼
14(14a、14b): 翼骨(左翼骨、右翼骨)
15(15a、15b): 翼面(左翼面、右翼面)
23、23a、23b: 翼拘束糸、左翼拘束糸、右翼拘束糸
24、24a、24b: 糸調節機構、左翼糸調節機構、右翼糸調節機構
31: 角速度センサ
32: 制御機器
41(41a、41b): 押圧アーム(左押圧アーム、右押圧アーム)
42(42a、42b): 押圧アーム傾動機構(左押圧アーム傾動機構、右押圧アーム傾動機構)
51: 圧電素子
52: センサ
53: 翼変形素子制御部
61〜63(61a〜63a、61b〜63b): 翼拘束糸、左翼拘束糸、右翼拘束糸
64〜66: 糸調節機構
【特許請求の範囲】
【請求項1】
胴部と、胴部を軸にして羽ばたき運動を行う左右一対の主翼とを備え、各主翼がシート状の翼面部材と翼面部材の前縁を支持する翼骨部材とを有する羽ばたき飛行装置であって、
胴部に支持される動力源と、
動力源で発生した動力を翼骨部材に伝達して翼骨部材の振り下ろし動作および振り上げ動作を行わせる翼骨運動機構と、
少なくとも振り下ろし動作時の翼面部材の形状、または、振り上げ動作時の翼面部材の形状のいずれかを能動的に変形させる翼面形状変形手段とを備えたことを特徴とする羽ばたき飛行装置。
【請求項2】
翼面形状変形手段は、翼面部材を能動的に変形させる変形量を調整する変形量調整機構をさらに備えたことを特徴とする請求項1に記載の羽ばたき飛行装置。
【請求項3】
ピッチ方向の角速度計と、ピッチ方向の角速度に応じて前記変形量調整機構を作動して翼面部材を能動的に変形させる変形量を調整する変形量制御部とを備えたことを特徴とする請求項2に記載の羽ばたき飛行装置。
【請求項4】
前記翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなることを特徴とする請求項1に記載の羽ばたき飛行装置。
【請求項5】
前記翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなり、前記変形量調整機構は胴部に傾動自在に取り付けられた支点部材により構成され、前記糸部材の一端が左翼面、他端が右翼面の中央付近にそれぞれ固定されるとともに、支点部材が前記糸部材の中間付近を支え、支点部材の傾き角の調整により翼面中央の下降量または上昇量を制限することを特徴とする請求項2に記載の羽ばたき飛行装置。
【請求項6】
前記翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなり、前記変形量調整機構は、胴部にそれぞれ独立に傾動自在に取り付けられた左翼支点部材と右翼支点部材とにより構成され、前記糸部材は左翼面中央付近と左翼支点部材とを結ぶ左翼糸部材、および、右翼面中央付近と右翼支点部材とを結ぶ右翼糸部材とからなり、各支点部材の傾き角の調整により各翼面中央付近の下降量または上昇量を独立に制限することを特徴とする請求項2に記載の羽ばたき飛行装置。
【請求項7】
前記翼面形状変形手段は、振り下ろし動作時に、翼面を下方から押圧して翼面中央付近の下降を制限することにより翼面中央付近が上に凸となるように能動的に変形させる押圧部材、または、振り上げ動作時に翼面を上方から押圧して翼面中央付近の上昇を制限することにより翼面中央付近が下に凸となるように能動的に変形させる押圧部材からなる請求項1に記載の羽ばたき飛行装置。
【請求項8】
前記翼面形状変形手段は、胴部にそれぞれ独立に支持された左翼押圧部材と右翼押圧部材とにより構成され、各押圧部材は各翼面中央付近に接する高さが独立に調整できるよう構成されることを特徴とする請求項7に記載の羽ばたき飛行装置。
【請求項9】
前記翼面形状変形手段は、翼面に貼り付けられ翼面を能動的に変形させる圧電素子またはバイオメタルからなる翼変形素子と、翼骨部材の振り下ろし動作および振り上げ動作に同期して翼変形素子を作動して翼面形状を周期的に変形する翼変形素子制御部とからなる請求項1に記載の羽ばたき飛行装置。
【請求項10】
前記翼面形状変形手段は、左翼用の翼変形素子と右翼用の翼変形素子とが独立に設けられ、翼変形素子制御部は、左翼用の翼変形素子と右翼用の翼変形素子とを独立に制御する請求項9に記載の羽ばたき飛行装置。
【請求項11】
前記翼面形状変形手段は、左右の主翼それぞれに対し左右の主翼が胴部に固定された位置の近傍を胴部に沿って前後に並ぶ複数の位置で、それぞれ下方に能動的に引張る糸部材からなる請求項1に記載の羽ばたき飛行装置。
【請求項12】
前記翼面形状変形手段は、左右の主翼それぞれに対し左右の主翼が胴部に固定された位置の近傍を胴部に沿って前後に並ぶ複数の位置で、それぞれ下方に能動的に引張る糸部材からなり、前記変形量調整機構は、胴部に沿って前後に並ぶ複数の位置で胴部に傾動自在に取り付けられた支点部材およびローラにより構成され、前記糸部材は一端が胴部近傍の左翼面または胴部近傍の右翼面にそれぞれ固定されるとともに、他端がローラを介して支点部材に固定される請求項2に記載の羽ばたき飛行装置。
【請求項1】
胴部と、胴部を軸にして羽ばたき運動を行う左右一対の主翼とを備え、各主翼がシート状の翼面部材と翼面部材の前縁を支持する翼骨部材とを有する羽ばたき飛行装置であって、
胴部に支持される動力源と、
動力源で発生した動力を翼骨部材に伝達して翼骨部材の振り下ろし動作および振り上げ動作を行わせる翼骨運動機構と、
少なくとも振り下ろし動作時の翼面部材の形状、または、振り上げ動作時の翼面部材の形状のいずれかを能動的に変形させる翼面形状変形手段とを備えたことを特徴とする羽ばたき飛行装置。
【請求項2】
翼面形状変形手段は、翼面部材を能動的に変形させる変形量を調整する変形量調整機構をさらに備えたことを特徴とする請求項1に記載の羽ばたき飛行装置。
【請求項3】
ピッチ方向の角速度計と、ピッチ方向の角速度に応じて前記変形量調整機構を作動して翼面部材を能動的に変形させる変形量を調整する変形量制御部とを備えたことを特徴とする請求項2に記載の羽ばたき飛行装置。
【請求項4】
前記翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなることを特徴とする請求項1に記載の羽ばたき飛行装置。
【請求項5】
前記翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなり、前記変形量調整機構は胴部に傾動自在に取り付けられた支点部材により構成され、前記糸部材の一端が左翼面、他端が右翼面の中央付近にそれぞれ固定されるとともに、支点部材が前記糸部材の中間付近を支え、支点部材の傾き角の調整により翼面中央の下降量または上昇量を制限することを特徴とする請求項2に記載の羽ばたき飛行装置。
【請求項6】
前記翼面形状変形手段は、振り下ろし動作時に翼面中央付近の下降を制限して翼面中央付近が上に凸となるように翼面部材を斜め上方に能動的に引張る糸部材、または、振り上げ動作時に翼面中央付近の上昇を制限して翼面中央付近が下に凸となるように翼面部材を斜め下方に能動的に引張る糸部材からなり、前記変形量調整機構は、胴部にそれぞれ独立に傾動自在に取り付けられた左翼支点部材と右翼支点部材とにより構成され、前記糸部材は左翼面中央付近と左翼支点部材とを結ぶ左翼糸部材、および、右翼面中央付近と右翼支点部材とを結ぶ右翼糸部材とからなり、各支点部材の傾き角の調整により各翼面中央付近の下降量または上昇量を独立に制限することを特徴とする請求項2に記載の羽ばたき飛行装置。
【請求項7】
前記翼面形状変形手段は、振り下ろし動作時に、翼面を下方から押圧して翼面中央付近の下降を制限することにより翼面中央付近が上に凸となるように能動的に変形させる押圧部材、または、振り上げ動作時に翼面を上方から押圧して翼面中央付近の上昇を制限することにより翼面中央付近が下に凸となるように能動的に変形させる押圧部材からなる請求項1に記載の羽ばたき飛行装置。
【請求項8】
前記翼面形状変形手段は、胴部にそれぞれ独立に支持された左翼押圧部材と右翼押圧部材とにより構成され、各押圧部材は各翼面中央付近に接する高さが独立に調整できるよう構成されることを特徴とする請求項7に記載の羽ばたき飛行装置。
【請求項9】
前記翼面形状変形手段は、翼面に貼り付けられ翼面を能動的に変形させる圧電素子またはバイオメタルからなる翼変形素子と、翼骨部材の振り下ろし動作および振り上げ動作に同期して翼変形素子を作動して翼面形状を周期的に変形する翼変形素子制御部とからなる請求項1に記載の羽ばたき飛行装置。
【請求項10】
前記翼面形状変形手段は、左翼用の翼変形素子と右翼用の翼変形素子とが独立に設けられ、翼変形素子制御部は、左翼用の翼変形素子と右翼用の翼変形素子とを独立に制御する請求項9に記載の羽ばたき飛行装置。
【請求項11】
前記翼面形状変形手段は、左右の主翼それぞれに対し左右の主翼が胴部に固定された位置の近傍を胴部に沿って前後に並ぶ複数の位置で、それぞれ下方に能動的に引張る糸部材からなる請求項1に記載の羽ばたき飛行装置。
【請求項12】
前記翼面形状変形手段は、左右の主翼それぞれに対し左右の主翼が胴部に固定された位置の近傍を胴部に沿って前後に並ぶ複数の位置で、それぞれ下方に能動的に引張る糸部材からなり、前記変形量調整機構は、胴部に沿って前後に並ぶ複数の位置で胴部に傾動自在に取り付けられた支点部材およびローラにより構成され、前記糸部材は一端が胴部近傍の左翼面または胴部近傍の右翼面にそれぞれ固定されるとともに、他端がローラを介して支点部材に固定される請求項2に記載の羽ばたき飛行装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−90770(P2009−90770A)
【公開日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願番号】特願2007−262093(P2007−262093)
【出願日】平成19年10月5日(2007.10.5)
【出願人】(505127721)公立大学法人大阪府立大学 (688)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願日】平成19年10月5日(2007.10.5)
【出願人】(505127721)公立大学法人大阪府立大学 (688)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]