
羽根駆動装置及び光学機器
【課題】立体画像の撮影用の羽根駆動装置及びそれを備えた光学機器を提供することを課題とする。
【解決手段】開口を有した基板と、第1溝、前記開口より小さい第1及び第2絞り開口、を有し、前記第1開口に対して進退可能な第1羽根と、第2溝を有し、前記開口に進退可能な第2羽根と、前記第1溝に係合して所定位置を中心に回転可能な第1駆動ピンを有した第1駆動部材と、前記第2溝に係合して所定位置を中心に回転可能な第2駆動ピンを有した第2駆動部材と、を備え、前記第1及び第2絞り開口の双方が前記開口に重なった閉鎖状態で前記第2駆動ピンが一方向に回転することにより、前記第2羽根は、前記第1絞り開口のみを遮蔽した位置と前記第2絞り開口のみを遮蔽した位置との間を往復移動する、羽根駆動装置。
【解決手段】開口を有した基板と、第1溝、前記開口より小さい第1及び第2絞り開口、を有し、前記第1開口に対して進退可能な第1羽根と、第2溝を有し、前記開口に進退可能な第2羽根と、前記第1溝に係合して所定位置を中心に回転可能な第1駆動ピンを有した第1駆動部材と、前記第2溝に係合して所定位置を中心に回転可能な第2駆動ピンを有した第2駆動部材と、を備え、前記第1及び第2絞り開口の双方が前記開口に重なった閉鎖状態で前記第2駆動ピンが一方向に回転することにより、前記第2羽根は、前記第1絞り開口のみを遮蔽した位置と前記第2絞り開口のみを遮蔽した位置との間を往復移動する、羽根駆動装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、羽根駆動装置及び光学機器に関する。
【背景技術】
【0002】
特許文献1には、立体画像を撮影可能なカメラが開示されている。このカメラには、右目用画像を撮影するためのレンズ及び撮像素子と、左目用画像を撮影するためのレンズ及び撮像素子とが個別に設けられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4533735号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、立体画像を撮影するための羽根駆動装置は開示されていない。
【0005】
そこで本発明は、立体画像の撮影用の羽根駆動装置及びそれを備えた光学機器を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的は、開口を有した基板と、第1溝、前記開口より小さい第1及び第2絞り開口、を有し、前記第1開口に対して進退可能な第1羽根と、第2溝を有し、前記開口に進退可能な第2羽根と、前記第1溝に係合して所定位置を中心に回転可能な第1駆動ピンを有した第1駆動部材と、前記第2溝に係合して所定位置を中心に回転可能な第2駆動ピンを有した第2駆動部材と、を備え、前記第1及び第2絞り開口の双方が前記開口に重なった閉鎖状態で前記第2駆動ピンが一方向に回転することにより、前記第2羽根は、前記第1絞り開口のみを遮蔽した位置と前記第2絞り開口のみを遮蔽した位置との間を往復移動する、羽根駆動装置によって達成できる。
【0007】
第2羽根の往復移動は第2駆動ピンが一方向に回転することにより実行される。このため、第2羽根は往復移動の速度を向上させることができ、また第2羽根は往復移動に伴う作動音を抑制することができる。これにより、立体映像の撮影に適した羽駆動装置を提供できる。
【0008】
上記目的は、上記羽根駆動装置を備えた光学機器によっても達成できる。
【発明の効果】
【0009】
本発明によれば、立体画像の撮影用の羽根駆動装置及びそれを備えた光学機器を提供できる。
【図面の簡単な説明】
【0010】
【図1】図1は、本実施例の羽根駆動装置の説明図である。
【図2】図2は、本実施例の羽根駆動装置の説明図である。
【図3】図3は、本実施例の羽根駆動装置の説明図である。
【図4】図4は、第2羽根が第2絞り開口を閉鎖した状態で第2駆動部材を停止して第1駆動部材を駆動する場合の図である。
【図5】図5A〜5Cは、第1羽根のロックの説明図である。
【図6】図6は、第1羽根、第2羽根との断面図である。
【発明を実施するための形態】
【0011】
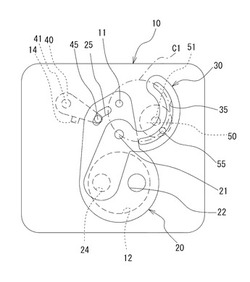
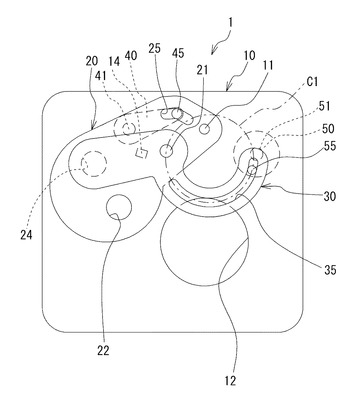
図1〜図3は、本実施例の羽根駆動装置1の説明図である。羽根駆動装置1は、カメラなどの光学機器に採用される羽根駆動装置である。羽根駆動装置1は、基板10、第1羽根20、第2羽根30、第1駆動部材40、第2駆動部材50を備えている。基板10には、開口12が設けられている。被写体側の光は開口12を通過し、カメラ側に設けられたCCDやCMOSセンサ等の撮像素子へ入射する。これにより撮像素子で結像される。図1は、第1羽根20、第2羽根30が開口12から退避した退避状態を示している。従って、図1では開口12が全開状態にある。図2、図3は、第1羽根20、第2羽根30が開口12を閉鎖した閉鎖状態を示している。第1羽根20、第2羽根30は、基板10の一方の面側に配置されている。第1駆動部材40、第2駆動部材50は、基板10の他方の面側に配置されている。第1駆動部材40、第2駆動部材50は、それぞれ不図示のアクチュエータにより回転する。
【0012】
尚、図1〜4において基板10を示す四角形状に対し、開口12、軸11、第1駆動部材40の軸41、第2駆動部材50の軸51、ストッパ14の位置が図毎にずれているが、これらの位置関係は固定されている。
【0013】
第1羽根20は、第1絞り開口22、第2絞り開口24の2つの開口が形成されている。第1絞り開口22、第2絞り開口24は、同一の大きさである。第1絞り開口22、第2絞り開口24のそれぞれの大きさは、開口12よりも小さい。第1羽根20は、基板10の軸11により回転可能に支持されている。尚、軸11は必ずしも開口12が形成された基板10に形成されていなくてもよく、開口12に対して定位置に設ければよい。第2羽根30は、詳しくは後述するが連結部材21により第1羽根20に対して回転可能に連結されている。基板10には、ストッパ14が設けられている。ストッパ14は、基板10の第1駆動部材40が設けられた側の面に設けられている。
【0014】
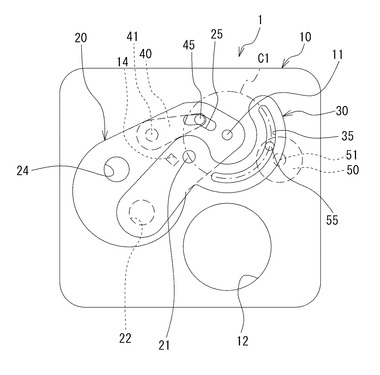
尚、本実施例においてはストッパ14により第1駆動部材40の回転を規制して第1羽根20を位置決めする例を挙げたが、図2に示すように、第1羽根20に当接するストッパ14´を追加して第1羽根20を位置決めしてもよい。ストッパ14及び14´は共に、第1羽根20が開口12から退避した退避状態から閉鎖した閉鎖状態に移行させる閉鎖状態側の回転を抑制する役割を有している。また、第1羽根20に当接するストッパ14´のみを用いて第1羽根20の閉鎖状態側の回転を抑制してもよい。
【0015】
第1羽根20、第2羽根30には、それぞれ第1溝25、第2溝35が形成されている。第1駆動部材40、第2駆動部材50は、それぞれ第1駆動ピン45、第2駆動ピン55を有している。第1駆動ピン45、第2駆動ピン55は、それぞれ第1溝25、第2溝35が係合している。第1駆動部材40は、レバー状であり、第2駆動部材50は、円板状であるがこのような形状に限定されない。第1駆動ピン45、第2駆動ピン55はいずれも、基板10に対する所定の位置、すなわち、それぞれの軸41、51を中心として回転する。基板10には、第1駆動ピン45、第2駆動ピン55の移動を逃がすための不図示の溝が形成されている。第1溝25は、2つの直線状の部分から構成される。第2溝35は円弧状である。
【0016】
第1駆動部材40、第2駆動部材50は、それぞれ個別に設けられたアクチュエータ(不図示)によって駆動する。具体的には、このアクチュエータは、周方向に異なる極性に着磁されたロータと、ロータとの間で磁気的吸引力及び反発力が作用するステータと、ステータを励磁するためのコイルと、を備えている。各ロータは、例えば各ロータの回転軸を介して、第1駆動部材40、第2駆動部材50に連結されている。これにより、各ロータの回転動力が第1駆動部材40、第2駆動部材50に伝達される。
【0017】
図1に示した状態では、第2羽根30は第1羽根20の第1絞り開口22を閉鎖している。図1に示した状態からストッパ14に当接するまで第1駆動部材40が時計方向に回転することにより、図2に示すように第1羽根20、第2羽根30が開口12を閉鎖する。この際に、第2羽根30は連結部材21により第1羽根20に連結されているので、第2羽根30は第1羽根20と共に開口12を閉鎖する位置に移動する。
【0018】
また、この際に第2駆動部材50は停止した状態にある。ここで、図1、図2に示すように、第2溝35の円弧形状の中心と、第1羽根20の回転中心である軸11との位置は略一致している。また、この状態で、第2駆動部材50に連結されたロータは無通電で停止している。即ち、無通電で停止しているロータの位置は、第2溝35の円弧形状の中心と第1羽根の回転中心とが一致した状態での第2溝35内に位置するように設定されている。このため、第1駆動部材40を駆動することにより、第2羽根30は、第1羽根20との相対的な位置関係を一定に保ったまま、第1羽根20と共に軸11を支点として回転することができる。
【0019】
尚、第2駆動部材50を駆動するアクチュエータは、無通電でロータが停止可能なステップモータである。具体的には、ロータの周方向に着磁された複数の異なる極性とステータとの間に作用する磁力により発生する保持トルクにより、ロータは無通電状態で所定の位置に停止する。これにより、図1に示した退避状態から第1駆動部材40のみが駆動して第1羽根20、第2羽根30が移動した場合であっても、第2駆動部材50は駆動しない。これにより、第1羽根20と共に第2羽根30が反時計方向に回転して、第2駆動ピン55は第2溝35内を相対移動する。また、図1、図2に示すように、第2羽根30は、第1羽根20の第2絞り開口24から退避し第1絞り開口22を閉鎖している。第2羽根30は、この状態を維持しつつ退避状態から閉鎖状態に移行可能である。
【0020】
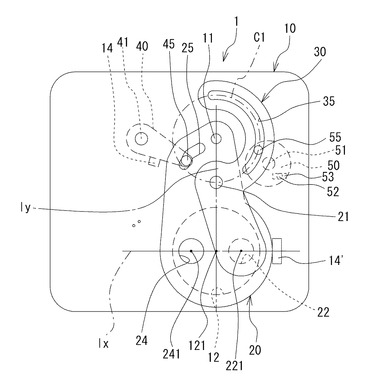
図2に示すように、閉鎖状態においては、開口12内に第1絞り開口22、第2絞り開口24の双方が完全に重なっている。そして、開口12の中心121を通る直線lx上で中心121に関して左右対称な位置に第1絞り開口22、第2絞り開口24それぞれの中心221、241が並んでいる。このとき、直線lxと直交し、中心121を通る直線ly上に軸11と連結部材21とが並ぶ。換言すれば、開口12、第1絞り開口22、第2絞り開口24の各大きさや、第1絞り開口22、第2絞り開口24の位置関係は、このような条件を満たすように設計されている。
【0021】
次に、第2羽根30の駆動について説明する。
図3に示すように、第2駆動部材50が反時計方向又は時計方向に回転することにより、第2駆動ピン55は第2溝35内を移動する。これにより、第2羽根30は連結部材21を支点として所定範囲を往復する。換言すれば第2羽根30は連結部材21を支点として所定の角度範囲を揺動する。これにより、図2、図3に示すように、第2羽根30は、第1絞り開口22、第2絞り開口24を交互に遮蔽するように第1絞り開口22、第2絞り開口24の間を往復動する。これにより、第1絞り開口22を通過して撮像素子に入射する光と、第2絞り開口24を通過して撮像素子に入射する光とを交互に切り替えることができる。従って、交互に2つの異なる視点に基づいた2種類の像を結像することができる。この2種類の画像に基づいて、立体画像を形成することができる。
【0022】
第2駆動部材50は、一方向に回転することにより、第2羽根30は、所定範囲を往復移動する。これにより、例えば、第2駆動部材50の回転方向を交互に切り替えることにより第2羽根30を往復移動させる場合と比較して、高速で第2羽根30を往復動させることができる。これにより、2つの視点の異なる画像を交互に高フレームレートで撮影することができる。
【0023】
また、第2羽根30を往復移動させる場合は、第2羽根30を位置決めするためのストッパに当接する作動音が発生するが、本実施例においては第2駆動部材50を一方向に回転させ、第2羽根30を位置決めするためのストッパを設けることなく第2羽根30を位置決め可能である。この構成により第2羽根30の作動音をなくして第1絞り開口22、第2絞り開口24を交互に遮蔽することができる。これにより2つの視点の異なる画像を、動作音を抑制して交互に高フレームレートで撮影することができる。
【0024】
ここで、第2羽根30と第1羽根20とを連結させずに第2羽根30を駆動することが考えられる。この場合、第2羽根30は、開口12から退避した退避位置と、第1羽根20が開口12を閉鎖した状態で第1絞り開口22を閉鎖する第1閉鎖位置と、第1羽根20が開口12を閉鎖した状態で第2絞り開口24を閉鎖する第2閉鎖位置との間を移動させる必要がある。この場合、第2駆動部材50を一方向にのみ回転させて第2羽根30を3つの位置に移動させる場合、第2羽根30は、退避位置、第1閉鎖位置、第2閉鎖位置との順に交互に移動することになる。これにより、第2羽根30は、一旦、退避位置に移動して、再度第1及び第2閉鎖位置に移動することになる。このため、第2羽根30の移動距離が大きくなり高速化には不向きである。また、第2羽根30は必ず退避位置を通過することになり、高フレームレートで異なる視点の画像を取得することができない。また、この場合、第2羽根30が一旦退避位置に位置している場合には、第1絞り開口22、第2絞り開口24の双方が開いた状態になるため、撮影画像にも悪影響を与えるおそれがある。
【0025】
本実施例の場合、上述したように第1羽根20、第2羽根30が連結されており、第2羽根30は第1駆動部材40の駆動により第1羽根20と共に開口12から退避した退避状態から開口12を閉鎖する閉鎖状態に移行する。このため第2羽根30は第2駆動部材50の駆動により第1絞り開口22を閉鎖する位置と第2絞り開口24を閉鎖する位置とを往復動するので、2つの視点の異なる画像を交互に高フレームレートで撮影することができる。
【0026】
本実施例の羽根駆動装置1は、例えば、カメラ側に設けられた単一のレンズよりも被写体側に配置される。第1絞り開口22、第2絞り開口24が交互に閉鎖されることにより、レンズへの入射位置が異なる光が交互に入射する。従って、例えば上述した特許第4533735号公報に開示されているカメラのように、右目用画像を取得するためのレンズ及び撮像素子と、左目用画像を取得するためのレンズ及び撮像素子とを個別に設ける必要はない。従って、一般的なレンズと単一の撮像素子とを備えたカメラに対して本実施例の羽根駆動装置を採用することができ、これにより一般的なカメラでも立体画像を撮影することができる。
【0027】
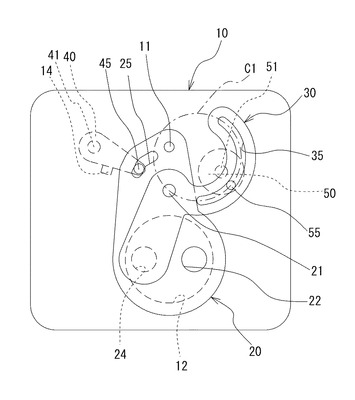
尚、図3の状態から退避状態に戻るためには、第2羽根30が第1絞り開口22を閉鎖した状態(図2の状態)で第2駆動部材50を停止させてから、第1駆動部材40を駆動して退避状態に移行させる必要がある。図4は、第2羽根30が第2絞り開口24を閉鎖した状態で第2駆動部材50を停止して第1駆動部材40を駆動する場合の図である。図3に示すように、第2羽根30が第2絞り開口24を閉鎖した状態では、第2溝35に沿った仮想円C1の中心の位置と、第1羽根20の回転中心である軸11の位置とがずれている。このため、この状態で第1駆動部材40が駆動することにより、図4に示すように、第2羽根30が回転して第2駆動部材50が回転させられる。
【0028】
本実施例の場合、第2駆動部材50の駆動源として、無通電でロータを停止可能なステップモータを採用しているので、第2駆動部材50の駆動源の保持力が、第1駆動部材40の駆動の抵抗となることが考えられる。また、図4に示すように、第2羽根30の一部が開口12に重なっている。このため、開口12を全開にした状態での撮影画像にも影響を与える。このため、本実施例の羽根駆動装置1では、第2羽根30が第1絞り開口22を閉鎖した状態で第2駆動部材50を停止させてから、第1駆動部材40を駆動することにより退避状態に復帰する。
【0029】
例えば、第2駆動部材50の第2駆動ピン55が図1、図2に示した位置で停止したことを検出するセンサを設けて、このセンサから出力信号に基づいてカメラ側の制御回路により第2駆動部材50の駆動の可否を決定するようにしてもよい。センサは、例えば第2駆動部材50を駆動するアクチュエータのロータの停止位置を検出する磁気センサ等である。磁気センサとしては、例えばホールセンサである。これに限らず、例えば図2に示すように、第2駆動部材50の所定位置に反射板52を設け、反射板52と対向する位置に反射型フォトセンサ53を設けて第2駆動部材50の位置を検出するなどしてもよい。また、反射板52に代えて透孔を設け、前記反射型フォトセンサに代えて、前記透孔を介して発光部と受光部とが対向するように設けられた透過型フォトセンサを設けてもよい。
【0030】
次に、第1羽根20のロックについて説明する。
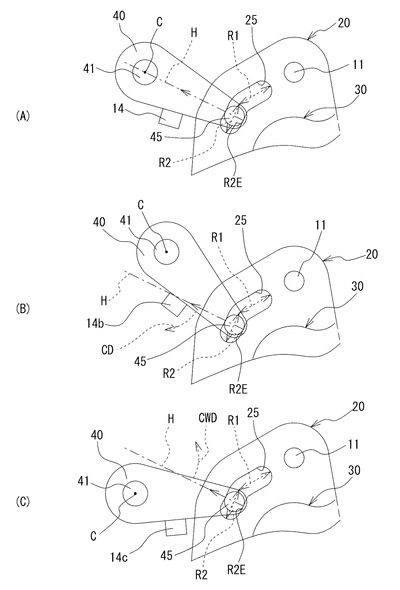
図5A〜5Cは、第1羽根20のロックの説明図である。尚、図5A〜5Cにおいては、理解を容易にするために全て実線で描いている。図5Aは、第1羽根20が閉鎖位置に位置している場合での第1駆動ピン45周辺の拡大図である。第1羽根20が開口12を閉鎖する閉鎖位置に位置している場合には、第1駆動ピン45が当接する第1溝25の縁R2Eに垂直な垂線Hは、第1駆動部材40の回転中心Cを通過している。何らかの原因により第1羽根20に軸11を中心として時計方向の力が作用した場合、第1駆動ピン45は垂線Hの方向に力を受ける。しかしながら、垂線Hは第1駆動部材40の回転中心Cを通過しているので、第1駆動部材40は回転しない。このため、第1羽根20は閉鎖位置でロックされる。これにより、閉鎖位置からの第1羽根20の不用意な位置ずれが防止される。
【0031】
図5Bは、第1駆動部材40の回転中心Cが垂線Hを介してストッパ14bとは逆側に配置され、第1羽根20がロックされている場合の説明図である。この場合、垂線Hは第1駆動部材40の回転中心Cを通過していない。垂線Hは、第1駆動部材40に対して時計方向CDに回転しようとする方向、換言すれば、第1羽根20を退避状態から閉鎖状態に回転させるように作用する方向となっている。第1羽根20に時計方向に力が作用すると、第1駆動部材40に対しては垂線Hの方向に力が作用するので、第1駆動部材40は時計方向CDに回転しようとする。しかしながらストッパ14bが設けられているため第1駆動部材40の時計方向の回転は抑制される。同様に、第1羽根20と当接するストッパ14b´が設けられている場合は、第1駆動部材40に対しては垂線Hの方向に力が作用して第1駆動部材40が時計方向に回転しようとしても、第1羽根20の閉鎖状態側の回転は抑制されている。このため、第1羽根20は閉鎖位置でロックされ、閉鎖位置からの第1羽根20の不用意な位置ズレが防止される。
【0032】
図5Cは、第1駆動部材40の回転中心Cとストッパ14cとが垂線Hに対して同一側に配置され、第1羽根20がロックされない場合の説明図である。この場合、第1羽根20に時計方向の力が作用した場合、垂線Hは、第1駆動部材40に対して反時計方向CWDに回転しようとする方向、換言すれば、第1羽根20を閉鎖状態から退避状態に回転させるように作用する方向となっている。このため第1駆動部材40がストッパ14cから離れる方向に力が作用するため、この場合においては、閉鎖位置から第1羽根20が位置ズレを起こす可能性がある。従って、この場合には第1羽根20はロックすることはできない。
【0033】
尚、第1溝25は、2つの直線状の領域R1、R2から構成される。領域R1、R2は、互いに延びている方向が異なっている。図1に示した退避状態においては、第1駆動ピン45は領域R1と領域R2との境界付近に位置する。図1に示した退避状態から第1駆動部材40が時計方向に回転すると、第1駆動ピン45は、領域R1と領域R2との境界付近から領域R1側の端部に向かって移動し始める。更に第1駆動部材40が時計方向に回転すると、第1羽根20が図2に示した閉鎖位置に移動する前に、第1駆動ピン45は領域R1から領域R2側に向かって移動する。第1羽根20が閉鎖位置に位置する際には第1駆動ピン45は領域R1を脱して領域R2側に位置する。このように、領域R1は、主に第1羽根20を退避位置及び閉鎖位置間を移動させるための機能を有し、領域R2は主に第1羽根20を閉鎖位置でロックするために機能している。尚、本実施例においては第1溝25が、2つの直線状の部分から構成される例を挙げたが、円弧形状やカム曲線で構成されてもよく、これらの組み合わせ形状で構成されてもよい。
【0034】
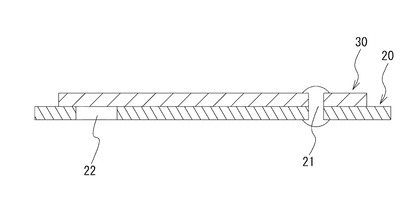
次に、連結部材21の構造について簡単に説明する。図6は、第1羽根20、第2羽根30との断面図である。連結部材21は、上端若しくは下端がカシメされたピン状の部材である。これにより、第1羽根20、第2羽根30は互いに連結されている。尚、第1羽根20と第2羽根30とを回転可能に連結するための部品はこのようなものに限定されない。
【0035】
以上本発明の好ましい実施形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、変形・変更が可能である。
【符号の説明】
【0036】
10 基板
12 開口
14 ストッパ
20 第1羽根
22 第1絞り開口
24 第2絞り開口
25 第1溝
30 第2羽根
35 第2溝
40 第1駆動部材
45 第1駆動ピン
50 第2駆動部材
55 第2駆動ピン
【技術分野】
【0001】
本発明は、羽根駆動装置及び光学機器に関する。
【背景技術】
【0002】
特許文献1には、立体画像を撮影可能なカメラが開示されている。このカメラには、右目用画像を撮影するためのレンズ及び撮像素子と、左目用画像を撮影するためのレンズ及び撮像素子とが個別に設けられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4533735号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、立体画像を撮影するための羽根駆動装置は開示されていない。
【0005】
そこで本発明は、立体画像の撮影用の羽根駆動装置及びそれを備えた光学機器を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的は、開口を有した基板と、第1溝、前記開口より小さい第1及び第2絞り開口、を有し、前記第1開口に対して進退可能な第1羽根と、第2溝を有し、前記開口に進退可能な第2羽根と、前記第1溝に係合して所定位置を中心に回転可能な第1駆動ピンを有した第1駆動部材と、前記第2溝に係合して所定位置を中心に回転可能な第2駆動ピンを有した第2駆動部材と、を備え、前記第1及び第2絞り開口の双方が前記開口に重なった閉鎖状態で前記第2駆動ピンが一方向に回転することにより、前記第2羽根は、前記第1絞り開口のみを遮蔽した位置と前記第2絞り開口のみを遮蔽した位置との間を往復移動する、羽根駆動装置によって達成できる。
【0007】
第2羽根の往復移動は第2駆動ピンが一方向に回転することにより実行される。このため、第2羽根は往復移動の速度を向上させることができ、また第2羽根は往復移動に伴う作動音を抑制することができる。これにより、立体映像の撮影に適した羽駆動装置を提供できる。
【0008】
上記目的は、上記羽根駆動装置を備えた光学機器によっても達成できる。
【発明の効果】
【0009】
本発明によれば、立体画像の撮影用の羽根駆動装置及びそれを備えた光学機器を提供できる。
【図面の簡単な説明】
【0010】
【図1】図1は、本実施例の羽根駆動装置の説明図である。
【図2】図2は、本実施例の羽根駆動装置の説明図である。
【図3】図3は、本実施例の羽根駆動装置の説明図である。
【図4】図4は、第2羽根が第2絞り開口を閉鎖した状態で第2駆動部材を停止して第1駆動部材を駆動する場合の図である。
【図5】図5A〜5Cは、第1羽根のロックの説明図である。
【図6】図6は、第1羽根、第2羽根との断面図である。
【発明を実施するための形態】
【0011】
図1〜図3は、本実施例の羽根駆動装置1の説明図である。羽根駆動装置1は、カメラなどの光学機器に採用される羽根駆動装置である。羽根駆動装置1は、基板10、第1羽根20、第2羽根30、第1駆動部材40、第2駆動部材50を備えている。基板10には、開口12が設けられている。被写体側の光は開口12を通過し、カメラ側に設けられたCCDやCMOSセンサ等の撮像素子へ入射する。これにより撮像素子で結像される。図1は、第1羽根20、第2羽根30が開口12から退避した退避状態を示している。従って、図1では開口12が全開状態にある。図2、図3は、第1羽根20、第2羽根30が開口12を閉鎖した閉鎖状態を示している。第1羽根20、第2羽根30は、基板10の一方の面側に配置されている。第1駆動部材40、第2駆動部材50は、基板10の他方の面側に配置されている。第1駆動部材40、第2駆動部材50は、それぞれ不図示のアクチュエータにより回転する。
【0012】
尚、図1〜4において基板10を示す四角形状に対し、開口12、軸11、第1駆動部材40の軸41、第2駆動部材50の軸51、ストッパ14の位置が図毎にずれているが、これらの位置関係は固定されている。
【0013】
第1羽根20は、第1絞り開口22、第2絞り開口24の2つの開口が形成されている。第1絞り開口22、第2絞り開口24は、同一の大きさである。第1絞り開口22、第2絞り開口24のそれぞれの大きさは、開口12よりも小さい。第1羽根20は、基板10の軸11により回転可能に支持されている。尚、軸11は必ずしも開口12が形成された基板10に形成されていなくてもよく、開口12に対して定位置に設ければよい。第2羽根30は、詳しくは後述するが連結部材21により第1羽根20に対して回転可能に連結されている。基板10には、ストッパ14が設けられている。ストッパ14は、基板10の第1駆動部材40が設けられた側の面に設けられている。
【0014】
尚、本実施例においてはストッパ14により第1駆動部材40の回転を規制して第1羽根20を位置決めする例を挙げたが、図2に示すように、第1羽根20に当接するストッパ14´を追加して第1羽根20を位置決めしてもよい。ストッパ14及び14´は共に、第1羽根20が開口12から退避した退避状態から閉鎖した閉鎖状態に移行させる閉鎖状態側の回転を抑制する役割を有している。また、第1羽根20に当接するストッパ14´のみを用いて第1羽根20の閉鎖状態側の回転を抑制してもよい。
【0015】
第1羽根20、第2羽根30には、それぞれ第1溝25、第2溝35が形成されている。第1駆動部材40、第2駆動部材50は、それぞれ第1駆動ピン45、第2駆動ピン55を有している。第1駆動ピン45、第2駆動ピン55は、それぞれ第1溝25、第2溝35が係合している。第1駆動部材40は、レバー状であり、第2駆動部材50は、円板状であるがこのような形状に限定されない。第1駆動ピン45、第2駆動ピン55はいずれも、基板10に対する所定の位置、すなわち、それぞれの軸41、51を中心として回転する。基板10には、第1駆動ピン45、第2駆動ピン55の移動を逃がすための不図示の溝が形成されている。第1溝25は、2つの直線状の部分から構成される。第2溝35は円弧状である。
【0016】
第1駆動部材40、第2駆動部材50は、それぞれ個別に設けられたアクチュエータ(不図示)によって駆動する。具体的には、このアクチュエータは、周方向に異なる極性に着磁されたロータと、ロータとの間で磁気的吸引力及び反発力が作用するステータと、ステータを励磁するためのコイルと、を備えている。各ロータは、例えば各ロータの回転軸を介して、第1駆動部材40、第2駆動部材50に連結されている。これにより、各ロータの回転動力が第1駆動部材40、第2駆動部材50に伝達される。
【0017】
図1に示した状態では、第2羽根30は第1羽根20の第1絞り開口22を閉鎖している。図1に示した状態からストッパ14に当接するまで第1駆動部材40が時計方向に回転することにより、図2に示すように第1羽根20、第2羽根30が開口12を閉鎖する。この際に、第2羽根30は連結部材21により第1羽根20に連結されているので、第2羽根30は第1羽根20と共に開口12を閉鎖する位置に移動する。
【0018】
また、この際に第2駆動部材50は停止した状態にある。ここで、図1、図2に示すように、第2溝35の円弧形状の中心と、第1羽根20の回転中心である軸11との位置は略一致している。また、この状態で、第2駆動部材50に連結されたロータは無通電で停止している。即ち、無通電で停止しているロータの位置は、第2溝35の円弧形状の中心と第1羽根の回転中心とが一致した状態での第2溝35内に位置するように設定されている。このため、第1駆動部材40を駆動することにより、第2羽根30は、第1羽根20との相対的な位置関係を一定に保ったまま、第1羽根20と共に軸11を支点として回転することができる。
【0019】
尚、第2駆動部材50を駆動するアクチュエータは、無通電でロータが停止可能なステップモータである。具体的には、ロータの周方向に着磁された複数の異なる極性とステータとの間に作用する磁力により発生する保持トルクにより、ロータは無通電状態で所定の位置に停止する。これにより、図1に示した退避状態から第1駆動部材40のみが駆動して第1羽根20、第2羽根30が移動した場合であっても、第2駆動部材50は駆動しない。これにより、第1羽根20と共に第2羽根30が反時計方向に回転して、第2駆動ピン55は第2溝35内を相対移動する。また、図1、図2に示すように、第2羽根30は、第1羽根20の第2絞り開口24から退避し第1絞り開口22を閉鎖している。第2羽根30は、この状態を維持しつつ退避状態から閉鎖状態に移行可能である。
【0020】
図2に示すように、閉鎖状態においては、開口12内に第1絞り開口22、第2絞り開口24の双方が完全に重なっている。そして、開口12の中心121を通る直線lx上で中心121に関して左右対称な位置に第1絞り開口22、第2絞り開口24それぞれの中心221、241が並んでいる。このとき、直線lxと直交し、中心121を通る直線ly上に軸11と連結部材21とが並ぶ。換言すれば、開口12、第1絞り開口22、第2絞り開口24の各大きさや、第1絞り開口22、第2絞り開口24の位置関係は、このような条件を満たすように設計されている。
【0021】
次に、第2羽根30の駆動について説明する。
図3に示すように、第2駆動部材50が反時計方向又は時計方向に回転することにより、第2駆動ピン55は第2溝35内を移動する。これにより、第2羽根30は連結部材21を支点として所定範囲を往復する。換言すれば第2羽根30は連結部材21を支点として所定の角度範囲を揺動する。これにより、図2、図3に示すように、第2羽根30は、第1絞り開口22、第2絞り開口24を交互に遮蔽するように第1絞り開口22、第2絞り開口24の間を往復動する。これにより、第1絞り開口22を通過して撮像素子に入射する光と、第2絞り開口24を通過して撮像素子に入射する光とを交互に切り替えることができる。従って、交互に2つの異なる視点に基づいた2種類の像を結像することができる。この2種類の画像に基づいて、立体画像を形成することができる。
【0022】
第2駆動部材50は、一方向に回転することにより、第2羽根30は、所定範囲を往復移動する。これにより、例えば、第2駆動部材50の回転方向を交互に切り替えることにより第2羽根30を往復移動させる場合と比較して、高速で第2羽根30を往復動させることができる。これにより、2つの視点の異なる画像を交互に高フレームレートで撮影することができる。
【0023】
また、第2羽根30を往復移動させる場合は、第2羽根30を位置決めするためのストッパに当接する作動音が発生するが、本実施例においては第2駆動部材50を一方向に回転させ、第2羽根30を位置決めするためのストッパを設けることなく第2羽根30を位置決め可能である。この構成により第2羽根30の作動音をなくして第1絞り開口22、第2絞り開口24を交互に遮蔽することができる。これにより2つの視点の異なる画像を、動作音を抑制して交互に高フレームレートで撮影することができる。
【0024】
ここで、第2羽根30と第1羽根20とを連結させずに第2羽根30を駆動することが考えられる。この場合、第2羽根30は、開口12から退避した退避位置と、第1羽根20が開口12を閉鎖した状態で第1絞り開口22を閉鎖する第1閉鎖位置と、第1羽根20が開口12を閉鎖した状態で第2絞り開口24を閉鎖する第2閉鎖位置との間を移動させる必要がある。この場合、第2駆動部材50を一方向にのみ回転させて第2羽根30を3つの位置に移動させる場合、第2羽根30は、退避位置、第1閉鎖位置、第2閉鎖位置との順に交互に移動することになる。これにより、第2羽根30は、一旦、退避位置に移動して、再度第1及び第2閉鎖位置に移動することになる。このため、第2羽根30の移動距離が大きくなり高速化には不向きである。また、第2羽根30は必ず退避位置を通過することになり、高フレームレートで異なる視点の画像を取得することができない。また、この場合、第2羽根30が一旦退避位置に位置している場合には、第1絞り開口22、第2絞り開口24の双方が開いた状態になるため、撮影画像にも悪影響を与えるおそれがある。
【0025】
本実施例の場合、上述したように第1羽根20、第2羽根30が連結されており、第2羽根30は第1駆動部材40の駆動により第1羽根20と共に開口12から退避した退避状態から開口12を閉鎖する閉鎖状態に移行する。このため第2羽根30は第2駆動部材50の駆動により第1絞り開口22を閉鎖する位置と第2絞り開口24を閉鎖する位置とを往復動するので、2つの視点の異なる画像を交互に高フレームレートで撮影することができる。
【0026】
本実施例の羽根駆動装置1は、例えば、カメラ側に設けられた単一のレンズよりも被写体側に配置される。第1絞り開口22、第2絞り開口24が交互に閉鎖されることにより、レンズへの入射位置が異なる光が交互に入射する。従って、例えば上述した特許第4533735号公報に開示されているカメラのように、右目用画像を取得するためのレンズ及び撮像素子と、左目用画像を取得するためのレンズ及び撮像素子とを個別に設ける必要はない。従って、一般的なレンズと単一の撮像素子とを備えたカメラに対して本実施例の羽根駆動装置を採用することができ、これにより一般的なカメラでも立体画像を撮影することができる。
【0027】
尚、図3の状態から退避状態に戻るためには、第2羽根30が第1絞り開口22を閉鎖した状態(図2の状態)で第2駆動部材50を停止させてから、第1駆動部材40を駆動して退避状態に移行させる必要がある。図4は、第2羽根30が第2絞り開口24を閉鎖した状態で第2駆動部材50を停止して第1駆動部材40を駆動する場合の図である。図3に示すように、第2羽根30が第2絞り開口24を閉鎖した状態では、第2溝35に沿った仮想円C1の中心の位置と、第1羽根20の回転中心である軸11の位置とがずれている。このため、この状態で第1駆動部材40が駆動することにより、図4に示すように、第2羽根30が回転して第2駆動部材50が回転させられる。
【0028】
本実施例の場合、第2駆動部材50の駆動源として、無通電でロータを停止可能なステップモータを採用しているので、第2駆動部材50の駆動源の保持力が、第1駆動部材40の駆動の抵抗となることが考えられる。また、図4に示すように、第2羽根30の一部が開口12に重なっている。このため、開口12を全開にした状態での撮影画像にも影響を与える。このため、本実施例の羽根駆動装置1では、第2羽根30が第1絞り開口22を閉鎖した状態で第2駆動部材50を停止させてから、第1駆動部材40を駆動することにより退避状態に復帰する。
【0029】
例えば、第2駆動部材50の第2駆動ピン55が図1、図2に示した位置で停止したことを検出するセンサを設けて、このセンサから出力信号に基づいてカメラ側の制御回路により第2駆動部材50の駆動の可否を決定するようにしてもよい。センサは、例えば第2駆動部材50を駆動するアクチュエータのロータの停止位置を検出する磁気センサ等である。磁気センサとしては、例えばホールセンサである。これに限らず、例えば図2に示すように、第2駆動部材50の所定位置に反射板52を設け、反射板52と対向する位置に反射型フォトセンサ53を設けて第2駆動部材50の位置を検出するなどしてもよい。また、反射板52に代えて透孔を設け、前記反射型フォトセンサに代えて、前記透孔を介して発光部と受光部とが対向するように設けられた透過型フォトセンサを設けてもよい。
【0030】
次に、第1羽根20のロックについて説明する。
図5A〜5Cは、第1羽根20のロックの説明図である。尚、図5A〜5Cにおいては、理解を容易にするために全て実線で描いている。図5Aは、第1羽根20が閉鎖位置に位置している場合での第1駆動ピン45周辺の拡大図である。第1羽根20が開口12を閉鎖する閉鎖位置に位置している場合には、第1駆動ピン45が当接する第1溝25の縁R2Eに垂直な垂線Hは、第1駆動部材40の回転中心Cを通過している。何らかの原因により第1羽根20に軸11を中心として時計方向の力が作用した場合、第1駆動ピン45は垂線Hの方向に力を受ける。しかしながら、垂線Hは第1駆動部材40の回転中心Cを通過しているので、第1駆動部材40は回転しない。このため、第1羽根20は閉鎖位置でロックされる。これにより、閉鎖位置からの第1羽根20の不用意な位置ずれが防止される。
【0031】
図5Bは、第1駆動部材40の回転中心Cが垂線Hを介してストッパ14bとは逆側に配置され、第1羽根20がロックされている場合の説明図である。この場合、垂線Hは第1駆動部材40の回転中心Cを通過していない。垂線Hは、第1駆動部材40に対して時計方向CDに回転しようとする方向、換言すれば、第1羽根20を退避状態から閉鎖状態に回転させるように作用する方向となっている。第1羽根20に時計方向に力が作用すると、第1駆動部材40に対しては垂線Hの方向に力が作用するので、第1駆動部材40は時計方向CDに回転しようとする。しかしながらストッパ14bが設けられているため第1駆動部材40の時計方向の回転は抑制される。同様に、第1羽根20と当接するストッパ14b´が設けられている場合は、第1駆動部材40に対しては垂線Hの方向に力が作用して第1駆動部材40が時計方向に回転しようとしても、第1羽根20の閉鎖状態側の回転は抑制されている。このため、第1羽根20は閉鎖位置でロックされ、閉鎖位置からの第1羽根20の不用意な位置ズレが防止される。
【0032】
図5Cは、第1駆動部材40の回転中心Cとストッパ14cとが垂線Hに対して同一側に配置され、第1羽根20がロックされない場合の説明図である。この場合、第1羽根20に時計方向の力が作用した場合、垂線Hは、第1駆動部材40に対して反時計方向CWDに回転しようとする方向、換言すれば、第1羽根20を閉鎖状態から退避状態に回転させるように作用する方向となっている。このため第1駆動部材40がストッパ14cから離れる方向に力が作用するため、この場合においては、閉鎖位置から第1羽根20が位置ズレを起こす可能性がある。従って、この場合には第1羽根20はロックすることはできない。
【0033】
尚、第1溝25は、2つの直線状の領域R1、R2から構成される。領域R1、R2は、互いに延びている方向が異なっている。図1に示した退避状態においては、第1駆動ピン45は領域R1と領域R2との境界付近に位置する。図1に示した退避状態から第1駆動部材40が時計方向に回転すると、第1駆動ピン45は、領域R1と領域R2との境界付近から領域R1側の端部に向かって移動し始める。更に第1駆動部材40が時計方向に回転すると、第1羽根20が図2に示した閉鎖位置に移動する前に、第1駆動ピン45は領域R1から領域R2側に向かって移動する。第1羽根20が閉鎖位置に位置する際には第1駆動ピン45は領域R1を脱して領域R2側に位置する。このように、領域R1は、主に第1羽根20を退避位置及び閉鎖位置間を移動させるための機能を有し、領域R2は主に第1羽根20を閉鎖位置でロックするために機能している。尚、本実施例においては第1溝25が、2つの直線状の部分から構成される例を挙げたが、円弧形状やカム曲線で構成されてもよく、これらの組み合わせ形状で構成されてもよい。
【0034】
次に、連結部材21の構造について簡単に説明する。図6は、第1羽根20、第2羽根30との断面図である。連結部材21は、上端若しくは下端がカシメされたピン状の部材である。これにより、第1羽根20、第2羽根30は互いに連結されている。尚、第1羽根20と第2羽根30とを回転可能に連結するための部品はこのようなものに限定されない。
【0035】
以上本発明の好ましい実施形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、変形・変更が可能である。
【符号の説明】
【0036】
10 基板
12 開口
14 ストッパ
20 第1羽根
22 第1絞り開口
24 第2絞り開口
25 第1溝
30 第2羽根
35 第2溝
40 第1駆動部材
45 第1駆動ピン
50 第2駆動部材
55 第2駆動ピン
【特許請求の範囲】
【請求項1】
開口を有した基板と、
第1溝、前記開口より小さい第1及び第2絞り開口、を有し、前記第1開口に対して進退可能な第1羽根と、
第2溝を有し、前記開口に進退可能な第2羽根と、
前記第1溝に係合して所定位置を中心に回転可能な第1駆動ピンを有した第1駆動部材と、
前記第2溝に係合して所定位置を中心に回転可能な第2駆動ピンを有した第2駆動部材と、を備え、
前記第1及び第2絞り開口の双方が前記開口に重なった閉鎖状態で前記第2駆動ピンが一方向に回転することにより、前記第2羽根は、前記第1絞り開口のみを遮蔽した位置と前記第2絞り開口のみを遮蔽した位置との間を往復移動する、羽根駆動装置。
【請求項2】
前記第2羽根は前記第1羽根に対して回転可能に連結されており、
前記第1駆動ピンが回転することにより前記第2羽根は前記第1羽根と共に前記開口に進退移動する、請求項1の羽根駆動装置。
【請求項3】
前記閉鎖状態で、前記第1駆動部材を前記閉鎖状態とする方向に回転不能とするストッパを備え、
前記閉鎖状態で、前記第1駆動部材の回転中心は、前記第1駆動ピンに当接している前記係合溝の内縁の垂線上に位置している、または、前記閉鎖状態で、前記垂線は、前記第1駆動部材に対して、前記第1羽根を前記開口から退避した退避状態から前記閉鎖状態に回転させるように作用する方向となる、請求項1又は2の羽根駆動装置。
【請求項4】
前記第2駆動部材を駆動するためのアクチュエータを備え、
前記アクチュエータは、無通電で所定位置で停止可能であり前記第2駆動部材に連結されたロータを含み、
前記第2溝は、所定位置を中心とする円弧形状であり、
前記第1羽根の回転中心と前記円弧の中心とが一致している際に、前記ロータが無通電で停止している際の前記第2駆動ピンの位置は前記第2溝内に位置し、この状態から前記第1羽根と前記第1羽根とを前記開口から退避させる、請求項1乃至3の何れかの羽根駆動装置。
【請求項5】
請求項1乃至4の何れかの羽根駆動装置を備えた光学機器。
【請求項1】
開口を有した基板と、
第1溝、前記開口より小さい第1及び第2絞り開口、を有し、前記第1開口に対して進退可能な第1羽根と、
第2溝を有し、前記開口に進退可能な第2羽根と、
前記第1溝に係合して所定位置を中心に回転可能な第1駆動ピンを有した第1駆動部材と、
前記第2溝に係合して所定位置を中心に回転可能な第2駆動ピンを有した第2駆動部材と、を備え、
前記第1及び第2絞り開口の双方が前記開口に重なった閉鎖状態で前記第2駆動ピンが一方向に回転することにより、前記第2羽根は、前記第1絞り開口のみを遮蔽した位置と前記第2絞り開口のみを遮蔽した位置との間を往復移動する、羽根駆動装置。
【請求項2】
前記第2羽根は前記第1羽根に対して回転可能に連結されており、
前記第1駆動ピンが回転することにより前記第2羽根は前記第1羽根と共に前記開口に進退移動する、請求項1の羽根駆動装置。
【請求項3】
前記閉鎖状態で、前記第1駆動部材を前記閉鎖状態とする方向に回転不能とするストッパを備え、
前記閉鎖状態で、前記第1駆動部材の回転中心は、前記第1駆動ピンに当接している前記係合溝の内縁の垂線上に位置している、または、前記閉鎖状態で、前記垂線は、前記第1駆動部材に対して、前記第1羽根を前記開口から退避した退避状態から前記閉鎖状態に回転させるように作用する方向となる、請求項1又は2の羽根駆動装置。
【請求項4】
前記第2駆動部材を駆動するためのアクチュエータを備え、
前記アクチュエータは、無通電で所定位置で停止可能であり前記第2駆動部材に連結されたロータを含み、
前記第2溝は、所定位置を中心とする円弧形状であり、
前記第1羽根の回転中心と前記円弧の中心とが一致している際に、前記ロータが無通電で停止している際の前記第2駆動ピンの位置は前記第2溝内に位置し、この状態から前記第1羽根と前記第1羽根とを前記開口から退避させる、請求項1乃至3の何れかの羽根駆動装置。
【請求項5】
請求項1乃至4の何れかの羽根駆動装置を備えた光学機器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−133225(P2012−133225A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2010−286668(P2010−286668)
【出願日】平成22年12月22日(2010.12.22)
【出願人】(396004981)セイコープレシジョン株式会社 (481)
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願日】平成22年12月22日(2010.12.22)
【出願人】(396004981)セイコープレシジョン株式会社 (481)
【Fターム(参考)】
[ Back to top ]