
羽根駆動装置及び光学機器

【課題】大型化を抑制しつつ羽根の作動特性のバラツキが抑制された複数のアクチュエータを備えた羽根駆動装置及びそれを備えた光学機器提供することを課題とする。
【解決手段】羽根駆動装置は、開口を有した基板と、前記開口から退避した位置と前記開口の少なくとも一部を覆う位置との間を移動可能な羽根と、第1軸を中心に回転可能な第1ロータ、第1ステータを含み、前記羽根を駆動可能な第1アクチュエータと、第2軸を中心に回転可能な第2ロータ、第2ステータを含み、前記羽根を駆動可能な第2アクチュエータと、前記第1及び第2アクチュエータをそれぞれ位置決めする第1及び第2位置決め部と、前記第1及び第2アクチュエータをそれぞれ前記第1及び第2位置決め部に向けて付勢する第1付勢部材と、を備えている。
【解決手段】羽根駆動装置は、開口を有した基板と、前記開口から退避した位置と前記開口の少なくとも一部を覆う位置との間を移動可能な羽根と、第1軸を中心に回転可能な第1ロータ、第1ステータを含み、前記羽根を駆動可能な第1アクチュエータと、第2軸を中心に回転可能な第2ロータ、第2ステータを含み、前記羽根を駆動可能な第2アクチュエータと、前記第1及び第2アクチュエータをそれぞれ位置決めする第1及び第2位置決め部と、前記第1及び第2アクチュエータをそれぞれ前記第1及び第2位置決め部に向けて付勢する第1付勢部材と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、羽根駆動装置及び光学機器に関する。
【背景技術】
【0002】
羽根駆動装置には、開口を有した基板と、開口を開閉可能な羽根と、羽根を駆動するアクチュエータとを備えたものがある。アクチュエータは、基板に一体に又は別体に設けられた位置決め部により位置決めされる。羽根の作動特性を安定させるために、位置決め部に向けてアクチュエータを付勢する付勢部材を設けることが考えられる。特許文献1には、アクチュエータのステータを付勢する付勢部材を備えた羽根駆動装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−256473号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
羽根駆動装置には、複数のアクチュエータを備えたものがある。このような場合に、複数のアクチュエータ毎に付勢部材を設けると、羽根駆動装置が大型化するおそれがある。
【0005】
そこで本発明は、大型化を抑制しつつ羽根の作動特性のバラツキが抑制された複数のアクチュエータを備えた羽根駆動装置及びそれを備えた光学機器を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的は、開口を有した基板と、前記開口から退避した位置と前記開口の少なくとも一部を覆う位置との間を移動可能な羽根と、第1軸を中心に回転可能な第1ロータ、第1ステータを含み、前記羽根を駆動可能な第1アクチュエータと、第2軸を中心に回転可能な第2ロータ、第2ステータを含み、前記羽根を駆動可能な第2アクチュエータと、前記第1及び第2アクチュエータをそれぞれ位置決めする第1及び第2位置決め部と、前記第1及び第2アクチュエータをそれぞれ前記第1及び第2位置決め部に向けて付勢する第1付勢部材と、を備えた羽根駆動装置によって達成できる。
【0007】
第1付勢部材により第1及び第2アクチュエータをそれぞれ第1及び第2位置決め部に向けて付勢するため、大型化を抑制しつつ羽根の作動特性のバラツキが抑制できる。
【0008】
上記目的は、上記の羽根駆動装置を備えた光学機器によっても達成できる。
【発明の効果】
【0009】
本発明によれば、大型化を抑制しつつ羽根の作動特性のバラツキが抑制された複数のアクチュエータを備えた羽根駆動装置及びそれを備えた光学機器を提供できる。
【図面の簡単な説明】
【0010】
【図1】図1は、本実施例の羽根駆動装置の斜視図である。
【図2】図2は、本実施例の羽根駆動装置の斜視図である。
【図3】図3は、ホルダの説明図である。
【図4】図4は、カバーの説明図である。
【発明を実施するための形態】
【0011】
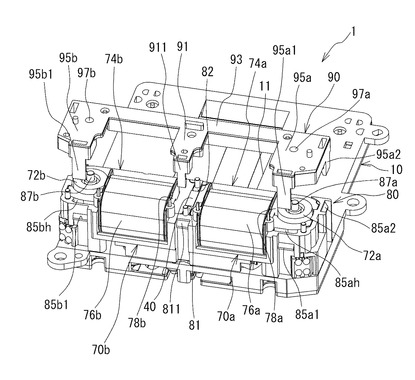
図1、2は、本実施例の羽根駆動装置1の斜視図である。羽根駆動装置1は、フォーカルプレーンシャッタとも称される。羽根駆動装置1は、ディジタルカメラ、スチールカメラ、ビデオカメラの光学機器に採用される。羽根駆動装置1は、基板10、先幕20a、後幕20b、アクチュエータ70a、70b、ホルダ80、カバー90等を備えている。先幕20aは、第1羽根群の一例である。後幕20bは、第2羽根群の一例である。基板10は、開口11を有している。先幕20a、後幕20bは、これら開口11を開閉する。アクチュエータ70a、70bは、それぞれ先幕20a、後幕20bを駆動する。アクチュエータ70a、70bは、それぞれ第1及び第2アクチュエータの一例である。ホルダ80は、アクチュエータ70a、70bを支持し基板10に固定されている。ホルダ80は、支持部の一例である。カバー90は、ホルダ80に支持されたアクチュエータ70a、70bの少なくとも一部を覆うようにしてホルダ80に固定される。
【0012】
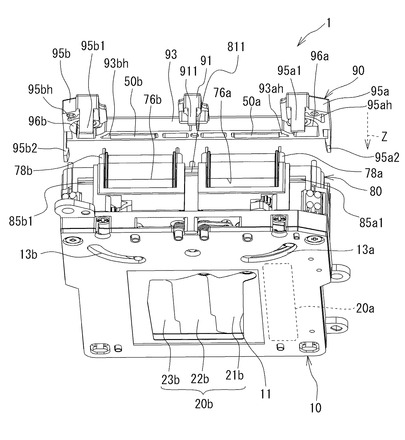
先幕20a、後幕20bは、それぞれ複数枚の羽根から構成される。具体的には、先幕20aを構成する複数の羽根は、基板10に回転可能に支持された2つのアーム部材に、平行リンク機構として連結されている。後幕20bも同様である。先幕20aは、複数の羽根が互いに重なった状態で開口11から退避し、複数の羽根が展開した状態で開口11を覆う。後幕20bも同様である。図1、2では、先幕20aを構成する複数の羽根が互いに重なって開口11から退避し、後幕20bを構成する羽根21b、22b、23bが展開して開口11を覆った状態を示している。
【0013】
アクチュエータ70aは、ホルダ80に回転可能に支持されたロータ72a、励磁されることによりロータ72aとの間で磁力が作用するステータ74a、ステータ74aを励磁するためのコイル76aを備えている。ロータ72aは、周方向に異なる極性に着磁された永久磁石である。ロータ72aの回転は、不図示の部材を介して先幕20aに伝達される。ロータ72aの回転により、先幕20aが駆動する。アクチュエータ70bについても同様である。ロータ72bが回転することにより、後幕20bが駆動する。尚、図2には、基板10に形成された逃げ溝13a、13bが示されている。逃げ溝13aは、ロータ72aの回転を先幕20aに伝達する駆動レバーのピンを逃がすためのものである。逃げ溝13bも同様である。
【0014】
基板10には、アクチュエータ70a、70bを支持するホルダ80が固定されている。ホルダ80には係合爪811、85a1、85a2、85b1、85b2(図1、2には不図示、図3に図示する)が設けられている。カバー90には複数の係合爪911、95a1、95a2、95b1、95b2が設けられている。これらの係合爪が互いに係合することにより、ホルダ80、カバー90は互いに固定される。ホルダ80、カバー90は合成樹脂製である。図1、2は、ホルダ80にカバー90を組み付ける前の状態を示している。尚、ホルダ80にカバー90が組付けられた後は、コイル76a、76bと電気的に接続されるフレキシブルプリント基板がカバー90に固定される。
【0015】
図3は、ホルダ80の説明図である。図3は、ホルダ80を正面から見た図である。ホルダ80には、ロータ72a、72bをそれぞれ回転可能に支持する軸87a、87bが形成されている。軸87a、87bは、基板10に平行な面に直交する方向に延びている。軸87a、87bは平行である。軸87a、87bは、第1及び第2軸の一例である。
【0016】
ホルダ80上に、ステータ74a、74bが配置されている。ステータ74aは、所定方向に延びた基部74a1、基部74a1の両端からそれぞれ基部74a1に交差する方向に延びた脚部74a2、74a4、脚部74a2の先端に形成された磁極部74a3、脚部74a4の先端に形成された磁極部74a5、を含む。脚部74a4には、コイル76aが巻回されたコイルボビン78aが組み付けられている。磁極部74a3、74a5は、ロータ72aに対向する。コイル76aの通電によって、磁極部74a3、74a5は互いに異なる極性に励磁される。これによって、磁極部74a3、74a5とロータ72aとの間に磁力が生じて、ロータ72aが回転する。同様に、ステータ74bは、基部74b1、脚部74b2、74b4、磁極部74b3、74b5を含み、コイル76bへの通電によってロータ72bが回転する。
【0017】
アクチュエータ70a、70bは、ステータ74aの基部74a1とステータ74bの基部74b1とが対向するようにホルダ80上に配置されている。詳細には、ステータ74a、74bは、軸87a、87bに直交する方向に並んでいる。ホルダ80には、ステータ74aの基部74a1とステータ74bの基部74b1との間を仕切る仕切壁81、82が設けられている。仕切壁81、82は、ステータ74a、74bが当接することを防止している。
【0018】
ホルダ80には、ステータ74aの磁極部74a3、74a5がそれぞれ当接し得る位置決め部84a3、84a5が形成されている。また、ホルダ80は、基部74a1が当接し得る位置決め部84a2が形成されている。位置決め部84a2、84a3、84a5は、それぞれ半円柱状である。図3に示すようにホルダ80を正面から見た場合、これら位置決め部84a2、84a3、84a5は、ステータ74aに向けて突出している。これら位置決め部に当接し得るステータ74aの部分は、位置決め部の形状に対応するように窪んでいる。これら位置決め部84a2、84a3、84a5によりアクチュエータ70aが所定の位置に位置決めされる。同様に、ホルダ80には、ステータ74bの基部74b1、磁極部74b3、74b5がそれぞれ当接し得る位置決め部84b2、84b3、84b5が形成され、これら位置決め部に当接し得るステータ74bの部分は、位置決め部の形状に対応するように窪んでいる。これら位置決め部84b2、84b3、84b5によりアクチュエータ70bが所定の位置に位置決めされる。
【0019】
ステータ74a、74bとの間には付勢部材40が配置されている。具体的には、ステータ74aの基部74a1とステータ74bの基部74b1との間に付勢部材40が配置されている。付勢部材40は、第1付勢部材の一例である。図3では、付勢部材40にハッチングをして示している。仕切壁81、82との間には、付勢部材40が収納するためのスペースが形成されている。このスペースに付勢部材40が配置されている。付勢部材40は、ゴムであるが、スポンジなどの発泡部材であってもよい。
【0020】
図3に示した状態では、付勢部材40は、ステータ74aを方向X1に付勢し、ステータ74bを方向X2に付勢する。ここで方向X1、X2は、基板10に平行な平面方向である。方向X1、X2は、互いに逆方向である。従って、付勢部材40は、ステータ74aを位置決め部84a3、84a5に向けて付勢し、ステータ74bを位置決め部84b3、84b5に向けて付勢している。換言すれば、付勢部材40は、アクチュエータ70aを位置決め部84a3、84a5に向けて、アクチュエータ70bを位置決め部84b3、84b5に向けてそれぞれ付勢している。また、付勢部材40は、ステータ74a、74bを、軸87a、87bに直交する方向に付勢している。位置決め部84a3、84a5は第1位置決め部の一例であり、位置決め部84b3、84b5は第2位置決め部の一例である。
【0021】
ホルダ80に対するステータ74aの組み付け手順は、ホルダ80にステータ74a、74bを組み付けた後に、ステータ74a、74bとの間に付勢部材40を挿入する。これにより、ステータ74a、74bは付勢部材40により付勢される。ここで、ステータ74aと、位置決め部84a2、84a3、84a5との間には、ホルダ80に対してステータ74aの組付けを容易にするためのクリアランスが設定されている。このクリアランスがないと、ステータ74aをホルダ80に組み付ける際に、ステータ74aが位置決め部84a2等に当接してステータ74aの組付け作業が困難になり、また、位置決め部84a2等が削れてゴミが発生するおそれがあるからである。
【0022】
しかしながら、ホルダ80にステータ74aを組み付けた後では、このクリアランスが、アクチュエータ70aによって駆動される羽根の作動特性のバラツキの原因となる。上述したように、アクチュエータ70aにおいて、コイル76aへの通電によって、磁極部74a3、74a5は互いに異なる極性に励磁され、磁極部74a3、74a5とロータ72aとの間に磁力が生じて、ロータ72aが回転する。ここで、ステータ74aと位置決め部84a2、84a3、84a5との間にクリアランスがあるため、磁極部74a3、74a5とロータ72a間との位置関係にバラツキが生じる。このロータ72aに対するステータ74aの相対位置のずれがロータ72aとステータ74aとの間に作用する磁力の特性のバラツキとなり、ロータ72aの回転特性のバラツキが生じる。具体的には、アクチュエータ70aの応答速度やトルク特性等の作動特性のバラツキとなり、さらにアクチュエータ70aによって駆動される先幕20aの応答速度や動作速度等の作動特性のバラツキが生じる。ステータ74bについても同様である。これにより、先幕20a、後幕20bの作動特性のバラツキが生じてしまう。本実施例の羽根駆動装置1では、上述したように付勢部材40がステータ74a、74bをそれぞれ位置決め部84a3、84a5、位置決め部84b3、84b5に向けて互いに反対方向に付勢する。これにより、上述したクリアランスを確保しつつ、ロータ72a、72bに対するステータ74a、74bの相対位置のずれが抑制される。ステータ74a、74bの位置ずれが抑制されるため、羽根駆動装置1のアクチュエータ70a、70bの作動特性のバラツキが抑制され、アクチュエータ70a、70bによって駆動される先幕20a、後幕20bの作動特性のバラツキが抑制されている。また、単一の付勢部材40により2つのステータ74a、74bを付勢しているため、付勢部材が占めるホルダ80上でのスペースが抑制されている。これによりホルダ80の大型化が抑制され、羽根駆動装置1の大型化が抑制されている。また、単一の付勢部材40により2つのステータ74a、74bを付勢しているので、部品点数が削減されている。
【0023】
付勢部材40は、ステータ74a、74bを仕切る仕切壁81、82との間に配置されている。このため、ホルダ80内のスペースを有効利用して付勢部材40が配置されており、ホルダ80の大型化が抑制されている。
【0024】
上述したように、付勢部材40は方向X1にのみステータ74aを付勢している。しかしながら、図3に示したように、位置決め部84a3、84a5は円柱状であり、これに当接する部分のステータ74aの形状もこれら位置決め部84a3、84a5に対応するように窪んでいる。このため、ステータ74aが方向X1に付勢されることにより、ステータ74aは位置決め部84a3、84a5により方向X1に直交する方向Yでの位置も規定される。同様に、ステータ74bは、方向X2及び方向Yでの位置も規定される。よって、付勢部材40、位置決め部84a3、84a5、84b3、84b5によりステータ74a、74bは平面方向での位置が規定される。
【0025】
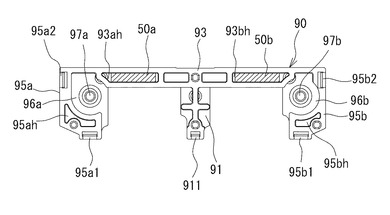
図4は、カバー90の説明図である。図4は、ホルダ80に対向するカバー90を、ホルダ80とカバー90とが組み付けられた状態においてホルダ80側から見た図を示している。図4に示すように、カバー90は、所定方向に延びた基部91、基部91と交差する方向に延びた延在部93、延在部93の両端にそれぞれ形成されたロータカバー部95a、95b、を含む。延在部93は、先幕20a、後幕20bの移動方向に延びている。基部91は、延在部93の略中心に位置し延在部93と直交する方向に延びている。ロータカバー部95a、95bには、それぞれ軸87a、87bが嵌合する嵌合孔97a、97bが形成されている。ロータカバー部95a、95bは、それぞれロータ72a、72bを覆う。基部91、延在部93、ロータカバー部95a、95bには、ホルダ80に設けられた複数のピンが嵌合する孔が設けられている。ホルダ80にカバー90を固定する際に、ホルダ80に形成された複数のピンがそれぞれカバー90に形成された複数の孔に嵌合する。
【0026】
延在部93には、長手方向に延びた肉抜き溝93ah、93bhが形成されている。肉抜き溝93ah、93bhには、それぞれ付勢部材50a、50bが挿入されている。肉抜き溝93ah、93bhは、延在部93を貫通しておらず、底を有した長穴状である。付勢部材50a、50bはゴムであるが、発泡部材であるスポンジであってもよい。図4では、付勢部材50a、50bにハッチングをして示している。図2に示すように、付勢部材50a、50bは、ホルダ80と対向するカバー90の下面からホルダ80側に若干突出している。
【0027】
ホルダ80をカバー90に組付けた状態で、付勢部材50a、50bは、それぞれステータ74a、74bを方向Zに付勢する。方向Zとは、基板10に平行な面の垂線の方向であり、方向X1、X2、Yと直交する方向である。換言すれば、方向Zは、ロータ72a、72bを回転可能に支持している軸87a、87bが延びた方向である。また、付勢部材50a、50bは、ステータ74a、74bをホルダ80に向けて付勢する。具体的には、付勢部材50a、50bは、それぞれ、ステータ74aの脚部74a2、ステータ74bの脚部74b2に当接してステータ74a、74bを付勢する。カバー90に保持される付勢部材50a、50bは、第2付勢部材の一例である。ここで、付勢部材40がステータ74a、74bを付勢する方向と、付勢部材50a、50bがステータ74a、74bを付勢する方向とは直交している。換言すれば、第1付勢部材が第1及び第2アクチュエータを付勢する方向と、第2付勢部材が第1及び第2アクチュエータを付勢する方向とは直交している。
【0028】
ホルダ80とカバー90とが組み付けられた状態で付勢部材50a、50bがそれぞれステータ74a、74bを付勢することにより、ステータ74a、74bはホルダ80に押し付けられて方向Zでの位置が規定される。これにより、ステータ74a、74bの方向Zでの位置が規定される。このように、第2付勢部材はステータ74a、74bの方向Zでの位置を規定する機能を有している。
【0029】
以上のように、付勢部材40、50aによりステータ74aの位置が方向X、Y、Zにおいて規定されるので、ロータ72aに対するステータ74aの相対位置のずれが確実に抑制される。これにより、ロータ72aとステータ74aとの間に作用する磁力の特性のバラつきが抑制される。従って、ロータ72aの回転特性のバラつきが抑制される。ロータ72bについても同様である。これにより、先幕20a、後幕20bの動作特性のバラつきが抑制される。
【0030】
本実施例において、アクチュエータ70aのステータ74aは同形状の複数枚のステータを、軸87aが伸延するZ方向に重ねて構成されている。これは、所望の出力を得るために必要な板厚のステータを1枚の板で加工すると、所望の形状精度が維持できない場合があるからである。本実施例の羽根駆動装置1のアクチュエータ70aにおいては2枚のステータ74aを軸87aの方向に重ねて構成している。ステータ74bについても同様である。ここで、上述したように、付勢部材40、50aによりステータ74aの位置が方向X、Y、Zにおいて規定されている。この場合、付勢部材50aは、方向Zにおいて2枚のステータ74aを密着させ、ステータ74aを通過する磁束のロスを低減し、アクチュエータ70aの出力特性のバラツキを抑制する機能も有している。アクチュエータ70b、ステータ74bについても同様である。これにより、先幕20a、後幕20bの動作特性のバラつきが抑制されると同時に、ステータを複数枚の板で構成した場合であっても、アクチュエータの出力特性のバラツキが抑制された羽根駆動装置を得ることができる。
【0031】
また、本実施例のアクチュエータのように複数枚のステータを用いた場合、入力条件によって、複数枚のステータが共振してノイズを発生する場合がある。本実施例において、付勢部材により複数枚のステータの位置が方向X、Y、Zにおいて規定されている。これにより、ステータの振動を防止してアクチュエータの共振ノイズを抑制することができる。
【0032】
尚、ステータ74aをホルダ80に接着することによりステータ74aの位置を規定することも考えられる。しかしながらこの場合、ステータ74aの位置出しや接着剤の塗布作業等により羽根駆動装置1の組立作業性が悪化し、またホルダ80に塗布した接着剤が所望以外の部分に流れるおそれがある。また、ネジによりステータ74aをホルダ80に固定することも考えられる。この場合も作業者はネジを締める作業を強いられるため羽根駆動装置1の組立作業性が悪化する。またステータ74aにネジが貫通する孔を設けなければならず、スペース効率が悪く、また、ゴミの発生するおそれがある。さらに、ステータ74aの加工が煩雑になりステータ74aの製造コストが増大するおそれがある。本実施例の羽根駆動装置1では、付勢部材40、50a、50bを用いるので、上記のような問題の発生は抑制される。
【0033】
図2、図4に示した肉抜き溝93ah、93bhは、それぞれカバー90の厚みを均一にするために設けられている。このような肉抜き溝93ah、93bhを利用して付勢部材50a、50bをカバー90に保持させることにより、カバー90の大型化を抑制することができる。
【0034】
尚、図3、図1に示すように、ホルダ80には、磁極部74a5、74b5周辺にそれぞれ切欠部85ah、85bhが形成されている。このため、切欠部85ahと磁極部74a5との間には空間が形成されている。同様に、切欠部85bhと磁極部74b5との間には空間が形成されている。付勢部材40に加えて、切欠部85ahと磁極部74a5との間、切欠部85bhと磁極部74b5との間のそれぞれに付勢部材を挿入してもよい。これら付勢部材により、ステータ74a、74bは方向Yに確実に付勢される。方向Yは軸87a、87bに直交し、付勢部材40がステータ74a、74bを付勢する方向X1、X2と直交する方向である。具体的には、切欠部85ahに挿入された付勢部材はステータ74aを位置決め部84a3に向けて付勢し、切欠部85bhに挿入された付勢部材は、ステータ74bを位置決め部84b3に向けて付勢する。切欠部85ah、85bhに挿入されホルダ80に保持される上記付勢部材は、第3付勢部材の一例である。ここで、第1付勢部材である付勢部材40がステータ74a、74bを付勢する方向、第2付勢部材である付勢部材50a、50bがステータ74a、74bを付勢する方向、切欠部85ah、85bhに挿入された、上記第3付勢部材がステータ74a、74bを付勢する方向は互いに直交している。これにより、ステータ74a、74bの位置を確実に規定することができる。
【0035】
また、図4に示すように、ロータカバー部95a、95bには、それぞれ、ロータ72a、72bを逃がすための逃げ部96a、96bが形成されている。また、ロータカバー部95a、95bには、それぞれ肉抜き溝95ah、95bhが形成されている。肉抜き溝95ah、95bhは、それぞれロータカバー部95a、95bを貫通せずに、底を有した穴状である。肉抜き溝95ah、95bhは、それぞれ、逃げ部96a、96bの近傍に形成されている。肉抜き溝95ah、95bhに、それぞれ付勢部材を挿入してもよい。これにより、ホルダ80にカバー90が固定された状態で、肉抜き溝95ah、95bhに挿入された付勢部材は、それぞれ、ステータ74aの磁極部74a5、ステータ74bの磁極部74b5を方向Zに付勢する。肉抜き溝95ah、95bhに挿入され、カバー90に保持された上記付勢部材は、第2付勢部材の一例であり、ステータ74a、74bの方向Zでの位置を規制する機能を有しており、これによっても、ステータ74a、74bの方向Zの位置を規定できる。
【0036】
ホルダ80の切欠部85ahに挿入された付勢部材と、カバー90の肉抜き溝95ahに挿入された付勢部材とは、ステータ74aの磁極部74a5に当接して磁極部74a5の方向Zにおいてのガタツキを防止する。ここで、磁極部74a5は、回転可能に支持されたロータ72aに対向している。このため、磁極部74a5には、ロータ72aの回転によって生じる振動が伝わりやすい。しかしながら、切欠部85ah、肉抜き溝95ahのそれぞれに挿入された付勢部材は、磁極部74a5に当接して磁極部74a5の位置を規定する。このように、ロータ72aの近傍にある磁極部74a5の位置を規定することにより、ロータ72aに対するステータ74aの相対位置のずれを効果的に抑制することができる。同様に、ホルダ80の切欠部85bh、カバー90の95bhのそれぞれに挿入された付勢部材についても、ロータ72bに対するステータ74bの相対位置のずれを効果的に抑制することができる。したがって、アクチュエータ70a、70bによって駆動される羽根の作動特性のバラツキが抑制される。
【0037】
尚、肉抜き溝93ahに付勢部材50aを挿入する代わりに、肉抜き溝95ahに付勢部材を挿入してもよいし、肉抜き溝93ahに付勢部材50aを挿入した上で更に肉抜き溝95ahにも付勢部材を挿入してもよい。同様に、肉抜き溝93bhに付勢部材50bを挿入する代わりに、肉抜き溝95bhに付勢部材を挿入してもよいし、肉抜き溝93bhに付勢部材50bを挿入した上で更に肉抜き溝95bhにも付勢部材を挿入してもよい。
【0038】
以上本発明の好ましい実施形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、変形・変更が可能である。
【0039】
上記実施例では羽根駆動装置の一例としてフォーカルプレーンシャッタを例に説明した。しかしながら、羽根駆動装置はフォーカルプレーンシャッタ以外のものであってもよい。羽根は、直線状に移動するものに限定されず、所定の位置を支点として回転するものであってもよい。また、羽根は、基板の開口を所望の大きさに絞る小絞り羽根であってもよい。また、単一のアクチュエータによって駆動される羽根は、一枚だけであってもよい。また、2つのアクチュエータを用いて一枚の羽根を駆動する羽根駆動装置であってもよい。
【0040】
上記実施例では、カバー90側に付勢部材50a、50bが設けられているが、このような構成に限定されずに、カバー90に向けてステータ74a、74bを付勢する付勢部材をホルダ80側に設けてもよい。
【0041】
付勢部材40、50a、50bの少なくとも一つは、非磁性体のバネであってもよい。例えば、付勢部材40、50a、50bの少なくとも一つは、非磁性体のコイルバネ又は板バネであってもよい。
【0042】
上記実施例では、ロータ72aと、ロータ72aを回転可能に支持する軸87aとは別部材である。即ち、軸87aはホルダ80に設けられており回転しない。しかしながら、このような構成に限定されずに、例えば、ロータ72aに一体に設けられた回転軸によってロータ72aが回転可能に支持された構成であってもよい。
【0043】
上記実施例では、アクチュエータ70a、70bを支持するホルダ80は、基板10とは別体に設けられている。しかしながらこのような構成に限定されず、例えば、ホルダ80の代わりに、アクチュエータ70a、70bを支持可能な支持部を基板10に一体に設けてもよい。
【符号の説明】
【0044】
1 羽根駆動装置
10 基板
11 開口
20a 先幕
20b 後幕
21b〜23b 羽根
40、50a、50b 付勢部材
70a、70b アクチュエータ
72a、72b ロータ
74a、74b ステータ
80 ホルダ
84a2、84b2、84a3、84b3、84a5、84b5 位置決め部
87a、87b 軸
【技術分野】
【0001】
本発明は、羽根駆動装置及び光学機器に関する。
【背景技術】
【0002】
羽根駆動装置には、開口を有した基板と、開口を開閉可能な羽根と、羽根を駆動するアクチュエータとを備えたものがある。アクチュエータは、基板に一体に又は別体に設けられた位置決め部により位置決めされる。羽根の作動特性を安定させるために、位置決め部に向けてアクチュエータを付勢する付勢部材を設けることが考えられる。特許文献1には、アクチュエータのステータを付勢する付勢部材を備えた羽根駆動装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−256473号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
羽根駆動装置には、複数のアクチュエータを備えたものがある。このような場合に、複数のアクチュエータ毎に付勢部材を設けると、羽根駆動装置が大型化するおそれがある。
【0005】
そこで本発明は、大型化を抑制しつつ羽根の作動特性のバラツキが抑制された複数のアクチュエータを備えた羽根駆動装置及びそれを備えた光学機器を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的は、開口を有した基板と、前記開口から退避した位置と前記開口の少なくとも一部を覆う位置との間を移動可能な羽根と、第1軸を中心に回転可能な第1ロータ、第1ステータを含み、前記羽根を駆動可能な第1アクチュエータと、第2軸を中心に回転可能な第2ロータ、第2ステータを含み、前記羽根を駆動可能な第2アクチュエータと、前記第1及び第2アクチュエータをそれぞれ位置決めする第1及び第2位置決め部と、前記第1及び第2アクチュエータをそれぞれ前記第1及び第2位置決め部に向けて付勢する第1付勢部材と、を備えた羽根駆動装置によって達成できる。
【0007】
第1付勢部材により第1及び第2アクチュエータをそれぞれ第1及び第2位置決め部に向けて付勢するため、大型化を抑制しつつ羽根の作動特性のバラツキが抑制できる。
【0008】
上記目的は、上記の羽根駆動装置を備えた光学機器によっても達成できる。
【発明の効果】
【0009】
本発明によれば、大型化を抑制しつつ羽根の作動特性のバラツキが抑制された複数のアクチュエータを備えた羽根駆動装置及びそれを備えた光学機器を提供できる。
【図面の簡単な説明】
【0010】
【図1】図1は、本実施例の羽根駆動装置の斜視図である。
【図2】図2は、本実施例の羽根駆動装置の斜視図である。
【図3】図3は、ホルダの説明図である。
【図4】図4は、カバーの説明図である。
【発明を実施するための形態】
【0011】
図1、2は、本実施例の羽根駆動装置1の斜視図である。羽根駆動装置1は、フォーカルプレーンシャッタとも称される。羽根駆動装置1は、ディジタルカメラ、スチールカメラ、ビデオカメラの光学機器に採用される。羽根駆動装置1は、基板10、先幕20a、後幕20b、アクチュエータ70a、70b、ホルダ80、カバー90等を備えている。先幕20aは、第1羽根群の一例である。後幕20bは、第2羽根群の一例である。基板10は、開口11を有している。先幕20a、後幕20bは、これら開口11を開閉する。アクチュエータ70a、70bは、それぞれ先幕20a、後幕20bを駆動する。アクチュエータ70a、70bは、それぞれ第1及び第2アクチュエータの一例である。ホルダ80は、アクチュエータ70a、70bを支持し基板10に固定されている。ホルダ80は、支持部の一例である。カバー90は、ホルダ80に支持されたアクチュエータ70a、70bの少なくとも一部を覆うようにしてホルダ80に固定される。
【0012】
先幕20a、後幕20bは、それぞれ複数枚の羽根から構成される。具体的には、先幕20aを構成する複数の羽根は、基板10に回転可能に支持された2つのアーム部材に、平行リンク機構として連結されている。後幕20bも同様である。先幕20aは、複数の羽根が互いに重なった状態で開口11から退避し、複数の羽根が展開した状態で開口11を覆う。後幕20bも同様である。図1、2では、先幕20aを構成する複数の羽根が互いに重なって開口11から退避し、後幕20bを構成する羽根21b、22b、23bが展開して開口11を覆った状態を示している。
【0013】
アクチュエータ70aは、ホルダ80に回転可能に支持されたロータ72a、励磁されることによりロータ72aとの間で磁力が作用するステータ74a、ステータ74aを励磁するためのコイル76aを備えている。ロータ72aは、周方向に異なる極性に着磁された永久磁石である。ロータ72aの回転は、不図示の部材を介して先幕20aに伝達される。ロータ72aの回転により、先幕20aが駆動する。アクチュエータ70bについても同様である。ロータ72bが回転することにより、後幕20bが駆動する。尚、図2には、基板10に形成された逃げ溝13a、13bが示されている。逃げ溝13aは、ロータ72aの回転を先幕20aに伝達する駆動レバーのピンを逃がすためのものである。逃げ溝13bも同様である。
【0014】
基板10には、アクチュエータ70a、70bを支持するホルダ80が固定されている。ホルダ80には係合爪811、85a1、85a2、85b1、85b2(図1、2には不図示、図3に図示する)が設けられている。カバー90には複数の係合爪911、95a1、95a2、95b1、95b2が設けられている。これらの係合爪が互いに係合することにより、ホルダ80、カバー90は互いに固定される。ホルダ80、カバー90は合成樹脂製である。図1、2は、ホルダ80にカバー90を組み付ける前の状態を示している。尚、ホルダ80にカバー90が組付けられた後は、コイル76a、76bと電気的に接続されるフレキシブルプリント基板がカバー90に固定される。
【0015】
図3は、ホルダ80の説明図である。図3は、ホルダ80を正面から見た図である。ホルダ80には、ロータ72a、72bをそれぞれ回転可能に支持する軸87a、87bが形成されている。軸87a、87bは、基板10に平行な面に直交する方向に延びている。軸87a、87bは平行である。軸87a、87bは、第1及び第2軸の一例である。
【0016】
ホルダ80上に、ステータ74a、74bが配置されている。ステータ74aは、所定方向に延びた基部74a1、基部74a1の両端からそれぞれ基部74a1に交差する方向に延びた脚部74a2、74a4、脚部74a2の先端に形成された磁極部74a3、脚部74a4の先端に形成された磁極部74a5、を含む。脚部74a4には、コイル76aが巻回されたコイルボビン78aが組み付けられている。磁極部74a3、74a5は、ロータ72aに対向する。コイル76aの通電によって、磁極部74a3、74a5は互いに異なる極性に励磁される。これによって、磁極部74a3、74a5とロータ72aとの間に磁力が生じて、ロータ72aが回転する。同様に、ステータ74bは、基部74b1、脚部74b2、74b4、磁極部74b3、74b5を含み、コイル76bへの通電によってロータ72bが回転する。
【0017】
アクチュエータ70a、70bは、ステータ74aの基部74a1とステータ74bの基部74b1とが対向するようにホルダ80上に配置されている。詳細には、ステータ74a、74bは、軸87a、87bに直交する方向に並んでいる。ホルダ80には、ステータ74aの基部74a1とステータ74bの基部74b1との間を仕切る仕切壁81、82が設けられている。仕切壁81、82は、ステータ74a、74bが当接することを防止している。
【0018】
ホルダ80には、ステータ74aの磁極部74a3、74a5がそれぞれ当接し得る位置決め部84a3、84a5が形成されている。また、ホルダ80は、基部74a1が当接し得る位置決め部84a2が形成されている。位置決め部84a2、84a3、84a5は、それぞれ半円柱状である。図3に示すようにホルダ80を正面から見た場合、これら位置決め部84a2、84a3、84a5は、ステータ74aに向けて突出している。これら位置決め部に当接し得るステータ74aの部分は、位置決め部の形状に対応するように窪んでいる。これら位置決め部84a2、84a3、84a5によりアクチュエータ70aが所定の位置に位置決めされる。同様に、ホルダ80には、ステータ74bの基部74b1、磁極部74b3、74b5がそれぞれ当接し得る位置決め部84b2、84b3、84b5が形成され、これら位置決め部に当接し得るステータ74bの部分は、位置決め部の形状に対応するように窪んでいる。これら位置決め部84b2、84b3、84b5によりアクチュエータ70bが所定の位置に位置決めされる。
【0019】
ステータ74a、74bとの間には付勢部材40が配置されている。具体的には、ステータ74aの基部74a1とステータ74bの基部74b1との間に付勢部材40が配置されている。付勢部材40は、第1付勢部材の一例である。図3では、付勢部材40にハッチングをして示している。仕切壁81、82との間には、付勢部材40が収納するためのスペースが形成されている。このスペースに付勢部材40が配置されている。付勢部材40は、ゴムであるが、スポンジなどの発泡部材であってもよい。
【0020】
図3に示した状態では、付勢部材40は、ステータ74aを方向X1に付勢し、ステータ74bを方向X2に付勢する。ここで方向X1、X2は、基板10に平行な平面方向である。方向X1、X2は、互いに逆方向である。従って、付勢部材40は、ステータ74aを位置決め部84a3、84a5に向けて付勢し、ステータ74bを位置決め部84b3、84b5に向けて付勢している。換言すれば、付勢部材40は、アクチュエータ70aを位置決め部84a3、84a5に向けて、アクチュエータ70bを位置決め部84b3、84b5に向けてそれぞれ付勢している。また、付勢部材40は、ステータ74a、74bを、軸87a、87bに直交する方向に付勢している。位置決め部84a3、84a5は第1位置決め部の一例であり、位置決め部84b3、84b5は第2位置決め部の一例である。
【0021】
ホルダ80に対するステータ74aの組み付け手順は、ホルダ80にステータ74a、74bを組み付けた後に、ステータ74a、74bとの間に付勢部材40を挿入する。これにより、ステータ74a、74bは付勢部材40により付勢される。ここで、ステータ74aと、位置決め部84a2、84a3、84a5との間には、ホルダ80に対してステータ74aの組付けを容易にするためのクリアランスが設定されている。このクリアランスがないと、ステータ74aをホルダ80に組み付ける際に、ステータ74aが位置決め部84a2等に当接してステータ74aの組付け作業が困難になり、また、位置決め部84a2等が削れてゴミが発生するおそれがあるからである。
【0022】
しかしながら、ホルダ80にステータ74aを組み付けた後では、このクリアランスが、アクチュエータ70aによって駆動される羽根の作動特性のバラツキの原因となる。上述したように、アクチュエータ70aにおいて、コイル76aへの通電によって、磁極部74a3、74a5は互いに異なる極性に励磁され、磁極部74a3、74a5とロータ72aとの間に磁力が生じて、ロータ72aが回転する。ここで、ステータ74aと位置決め部84a2、84a3、84a5との間にクリアランスがあるため、磁極部74a3、74a5とロータ72a間との位置関係にバラツキが生じる。このロータ72aに対するステータ74aの相対位置のずれがロータ72aとステータ74aとの間に作用する磁力の特性のバラツキとなり、ロータ72aの回転特性のバラツキが生じる。具体的には、アクチュエータ70aの応答速度やトルク特性等の作動特性のバラツキとなり、さらにアクチュエータ70aによって駆動される先幕20aの応答速度や動作速度等の作動特性のバラツキが生じる。ステータ74bについても同様である。これにより、先幕20a、後幕20bの作動特性のバラツキが生じてしまう。本実施例の羽根駆動装置1では、上述したように付勢部材40がステータ74a、74bをそれぞれ位置決め部84a3、84a5、位置決め部84b3、84b5に向けて互いに反対方向に付勢する。これにより、上述したクリアランスを確保しつつ、ロータ72a、72bに対するステータ74a、74bの相対位置のずれが抑制される。ステータ74a、74bの位置ずれが抑制されるため、羽根駆動装置1のアクチュエータ70a、70bの作動特性のバラツキが抑制され、アクチュエータ70a、70bによって駆動される先幕20a、後幕20bの作動特性のバラツキが抑制されている。また、単一の付勢部材40により2つのステータ74a、74bを付勢しているため、付勢部材が占めるホルダ80上でのスペースが抑制されている。これによりホルダ80の大型化が抑制され、羽根駆動装置1の大型化が抑制されている。また、単一の付勢部材40により2つのステータ74a、74bを付勢しているので、部品点数が削減されている。
【0023】
付勢部材40は、ステータ74a、74bを仕切る仕切壁81、82との間に配置されている。このため、ホルダ80内のスペースを有効利用して付勢部材40が配置されており、ホルダ80の大型化が抑制されている。
【0024】
上述したように、付勢部材40は方向X1にのみステータ74aを付勢している。しかしながら、図3に示したように、位置決め部84a3、84a5は円柱状であり、これに当接する部分のステータ74aの形状もこれら位置決め部84a3、84a5に対応するように窪んでいる。このため、ステータ74aが方向X1に付勢されることにより、ステータ74aは位置決め部84a3、84a5により方向X1に直交する方向Yでの位置も規定される。同様に、ステータ74bは、方向X2及び方向Yでの位置も規定される。よって、付勢部材40、位置決め部84a3、84a5、84b3、84b5によりステータ74a、74bは平面方向での位置が規定される。
【0025】
図4は、カバー90の説明図である。図4は、ホルダ80に対向するカバー90を、ホルダ80とカバー90とが組み付けられた状態においてホルダ80側から見た図を示している。図4に示すように、カバー90は、所定方向に延びた基部91、基部91と交差する方向に延びた延在部93、延在部93の両端にそれぞれ形成されたロータカバー部95a、95b、を含む。延在部93は、先幕20a、後幕20bの移動方向に延びている。基部91は、延在部93の略中心に位置し延在部93と直交する方向に延びている。ロータカバー部95a、95bには、それぞれ軸87a、87bが嵌合する嵌合孔97a、97bが形成されている。ロータカバー部95a、95bは、それぞれロータ72a、72bを覆う。基部91、延在部93、ロータカバー部95a、95bには、ホルダ80に設けられた複数のピンが嵌合する孔が設けられている。ホルダ80にカバー90を固定する際に、ホルダ80に形成された複数のピンがそれぞれカバー90に形成された複数の孔に嵌合する。
【0026】
延在部93には、長手方向に延びた肉抜き溝93ah、93bhが形成されている。肉抜き溝93ah、93bhには、それぞれ付勢部材50a、50bが挿入されている。肉抜き溝93ah、93bhは、延在部93を貫通しておらず、底を有した長穴状である。付勢部材50a、50bはゴムであるが、発泡部材であるスポンジであってもよい。図4では、付勢部材50a、50bにハッチングをして示している。図2に示すように、付勢部材50a、50bは、ホルダ80と対向するカバー90の下面からホルダ80側に若干突出している。
【0027】
ホルダ80をカバー90に組付けた状態で、付勢部材50a、50bは、それぞれステータ74a、74bを方向Zに付勢する。方向Zとは、基板10に平行な面の垂線の方向であり、方向X1、X2、Yと直交する方向である。換言すれば、方向Zは、ロータ72a、72bを回転可能に支持している軸87a、87bが延びた方向である。また、付勢部材50a、50bは、ステータ74a、74bをホルダ80に向けて付勢する。具体的には、付勢部材50a、50bは、それぞれ、ステータ74aの脚部74a2、ステータ74bの脚部74b2に当接してステータ74a、74bを付勢する。カバー90に保持される付勢部材50a、50bは、第2付勢部材の一例である。ここで、付勢部材40がステータ74a、74bを付勢する方向と、付勢部材50a、50bがステータ74a、74bを付勢する方向とは直交している。換言すれば、第1付勢部材が第1及び第2アクチュエータを付勢する方向と、第2付勢部材が第1及び第2アクチュエータを付勢する方向とは直交している。
【0028】
ホルダ80とカバー90とが組み付けられた状態で付勢部材50a、50bがそれぞれステータ74a、74bを付勢することにより、ステータ74a、74bはホルダ80に押し付けられて方向Zでの位置が規定される。これにより、ステータ74a、74bの方向Zでの位置が規定される。このように、第2付勢部材はステータ74a、74bの方向Zでの位置を規定する機能を有している。
【0029】
以上のように、付勢部材40、50aによりステータ74aの位置が方向X、Y、Zにおいて規定されるので、ロータ72aに対するステータ74aの相対位置のずれが確実に抑制される。これにより、ロータ72aとステータ74aとの間に作用する磁力の特性のバラつきが抑制される。従って、ロータ72aの回転特性のバラつきが抑制される。ロータ72bについても同様である。これにより、先幕20a、後幕20bの動作特性のバラつきが抑制される。
【0030】
本実施例において、アクチュエータ70aのステータ74aは同形状の複数枚のステータを、軸87aが伸延するZ方向に重ねて構成されている。これは、所望の出力を得るために必要な板厚のステータを1枚の板で加工すると、所望の形状精度が維持できない場合があるからである。本実施例の羽根駆動装置1のアクチュエータ70aにおいては2枚のステータ74aを軸87aの方向に重ねて構成している。ステータ74bについても同様である。ここで、上述したように、付勢部材40、50aによりステータ74aの位置が方向X、Y、Zにおいて規定されている。この場合、付勢部材50aは、方向Zにおいて2枚のステータ74aを密着させ、ステータ74aを通過する磁束のロスを低減し、アクチュエータ70aの出力特性のバラツキを抑制する機能も有している。アクチュエータ70b、ステータ74bについても同様である。これにより、先幕20a、後幕20bの動作特性のバラつきが抑制されると同時に、ステータを複数枚の板で構成した場合であっても、アクチュエータの出力特性のバラツキが抑制された羽根駆動装置を得ることができる。
【0031】
また、本実施例のアクチュエータのように複数枚のステータを用いた場合、入力条件によって、複数枚のステータが共振してノイズを発生する場合がある。本実施例において、付勢部材により複数枚のステータの位置が方向X、Y、Zにおいて規定されている。これにより、ステータの振動を防止してアクチュエータの共振ノイズを抑制することができる。
【0032】
尚、ステータ74aをホルダ80に接着することによりステータ74aの位置を規定することも考えられる。しかしながらこの場合、ステータ74aの位置出しや接着剤の塗布作業等により羽根駆動装置1の組立作業性が悪化し、またホルダ80に塗布した接着剤が所望以外の部分に流れるおそれがある。また、ネジによりステータ74aをホルダ80に固定することも考えられる。この場合も作業者はネジを締める作業を強いられるため羽根駆動装置1の組立作業性が悪化する。またステータ74aにネジが貫通する孔を設けなければならず、スペース効率が悪く、また、ゴミの発生するおそれがある。さらに、ステータ74aの加工が煩雑になりステータ74aの製造コストが増大するおそれがある。本実施例の羽根駆動装置1では、付勢部材40、50a、50bを用いるので、上記のような問題の発生は抑制される。
【0033】
図2、図4に示した肉抜き溝93ah、93bhは、それぞれカバー90の厚みを均一にするために設けられている。このような肉抜き溝93ah、93bhを利用して付勢部材50a、50bをカバー90に保持させることにより、カバー90の大型化を抑制することができる。
【0034】
尚、図3、図1に示すように、ホルダ80には、磁極部74a5、74b5周辺にそれぞれ切欠部85ah、85bhが形成されている。このため、切欠部85ahと磁極部74a5との間には空間が形成されている。同様に、切欠部85bhと磁極部74b5との間には空間が形成されている。付勢部材40に加えて、切欠部85ahと磁極部74a5との間、切欠部85bhと磁極部74b5との間のそれぞれに付勢部材を挿入してもよい。これら付勢部材により、ステータ74a、74bは方向Yに確実に付勢される。方向Yは軸87a、87bに直交し、付勢部材40がステータ74a、74bを付勢する方向X1、X2と直交する方向である。具体的には、切欠部85ahに挿入された付勢部材はステータ74aを位置決め部84a3に向けて付勢し、切欠部85bhに挿入された付勢部材は、ステータ74bを位置決め部84b3に向けて付勢する。切欠部85ah、85bhに挿入されホルダ80に保持される上記付勢部材は、第3付勢部材の一例である。ここで、第1付勢部材である付勢部材40がステータ74a、74bを付勢する方向、第2付勢部材である付勢部材50a、50bがステータ74a、74bを付勢する方向、切欠部85ah、85bhに挿入された、上記第3付勢部材がステータ74a、74bを付勢する方向は互いに直交している。これにより、ステータ74a、74bの位置を確実に規定することができる。
【0035】
また、図4に示すように、ロータカバー部95a、95bには、それぞれ、ロータ72a、72bを逃がすための逃げ部96a、96bが形成されている。また、ロータカバー部95a、95bには、それぞれ肉抜き溝95ah、95bhが形成されている。肉抜き溝95ah、95bhは、それぞれロータカバー部95a、95bを貫通せずに、底を有した穴状である。肉抜き溝95ah、95bhは、それぞれ、逃げ部96a、96bの近傍に形成されている。肉抜き溝95ah、95bhに、それぞれ付勢部材を挿入してもよい。これにより、ホルダ80にカバー90が固定された状態で、肉抜き溝95ah、95bhに挿入された付勢部材は、それぞれ、ステータ74aの磁極部74a5、ステータ74bの磁極部74b5を方向Zに付勢する。肉抜き溝95ah、95bhに挿入され、カバー90に保持された上記付勢部材は、第2付勢部材の一例であり、ステータ74a、74bの方向Zでの位置を規制する機能を有しており、これによっても、ステータ74a、74bの方向Zの位置を規定できる。
【0036】
ホルダ80の切欠部85ahに挿入された付勢部材と、カバー90の肉抜き溝95ahに挿入された付勢部材とは、ステータ74aの磁極部74a5に当接して磁極部74a5の方向Zにおいてのガタツキを防止する。ここで、磁極部74a5は、回転可能に支持されたロータ72aに対向している。このため、磁極部74a5には、ロータ72aの回転によって生じる振動が伝わりやすい。しかしながら、切欠部85ah、肉抜き溝95ahのそれぞれに挿入された付勢部材は、磁極部74a5に当接して磁極部74a5の位置を規定する。このように、ロータ72aの近傍にある磁極部74a5の位置を規定することにより、ロータ72aに対するステータ74aの相対位置のずれを効果的に抑制することができる。同様に、ホルダ80の切欠部85bh、カバー90の95bhのそれぞれに挿入された付勢部材についても、ロータ72bに対するステータ74bの相対位置のずれを効果的に抑制することができる。したがって、アクチュエータ70a、70bによって駆動される羽根の作動特性のバラツキが抑制される。
【0037】
尚、肉抜き溝93ahに付勢部材50aを挿入する代わりに、肉抜き溝95ahに付勢部材を挿入してもよいし、肉抜き溝93ahに付勢部材50aを挿入した上で更に肉抜き溝95ahにも付勢部材を挿入してもよい。同様に、肉抜き溝93bhに付勢部材50bを挿入する代わりに、肉抜き溝95bhに付勢部材を挿入してもよいし、肉抜き溝93bhに付勢部材50bを挿入した上で更に肉抜き溝95bhにも付勢部材を挿入してもよい。
【0038】
以上本発明の好ましい実施形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、変形・変更が可能である。
【0039】
上記実施例では羽根駆動装置の一例としてフォーカルプレーンシャッタを例に説明した。しかしながら、羽根駆動装置はフォーカルプレーンシャッタ以外のものであってもよい。羽根は、直線状に移動するものに限定されず、所定の位置を支点として回転するものであってもよい。また、羽根は、基板の開口を所望の大きさに絞る小絞り羽根であってもよい。また、単一のアクチュエータによって駆動される羽根は、一枚だけであってもよい。また、2つのアクチュエータを用いて一枚の羽根を駆動する羽根駆動装置であってもよい。
【0040】
上記実施例では、カバー90側に付勢部材50a、50bが設けられているが、このような構成に限定されずに、カバー90に向けてステータ74a、74bを付勢する付勢部材をホルダ80側に設けてもよい。
【0041】
付勢部材40、50a、50bの少なくとも一つは、非磁性体のバネであってもよい。例えば、付勢部材40、50a、50bの少なくとも一つは、非磁性体のコイルバネ又は板バネであってもよい。
【0042】
上記実施例では、ロータ72aと、ロータ72aを回転可能に支持する軸87aとは別部材である。即ち、軸87aはホルダ80に設けられており回転しない。しかしながら、このような構成に限定されずに、例えば、ロータ72aに一体に設けられた回転軸によってロータ72aが回転可能に支持された構成であってもよい。
【0043】
上記実施例では、アクチュエータ70a、70bを支持するホルダ80は、基板10とは別体に設けられている。しかしながらこのような構成に限定されず、例えば、ホルダ80の代わりに、アクチュエータ70a、70bを支持可能な支持部を基板10に一体に設けてもよい。
【符号の説明】
【0044】
1 羽根駆動装置
10 基板
11 開口
20a 先幕
20b 後幕
21b〜23b 羽根
40、50a、50b 付勢部材
70a、70b アクチュエータ
72a、72b ロータ
74a、74b ステータ
80 ホルダ
84a2、84b2、84a3、84b3、84a5、84b5 位置決め部
87a、87b 軸
【特許請求の範囲】
【請求項1】
開口を有した基板と、
前記開口から退避した位置と前記開口の少なくとも一部を覆う位置との間を移動可能な羽根と、
第1軸を中心に回転可能な第1ロータ、第1ステータを含み、前記羽根を駆動可能な第1アクチュエータと、
第2軸を中心に回転可能な第2ロータ、第2ステータを含み、前記羽根を駆動可能な第2アクチュエータと、
前記第1及び第2アクチュエータをそれぞれ位置決めする第1及び第2位置決め部と、
前記第1及び第2アクチュエータをそれぞれ前記第1及び第2位置決め部に向けて付勢する第1付勢部材と、を備えた羽根駆動装置。
【請求項2】
前記第1及び第2位置決め部は、それぞれ前記第1及び第2ステータを位置決めし、
前記第1付勢部材は、前記第1及び第2ステータをそれぞれ前記第1及び第2位置決め部に向けて付勢する、請求項1の羽根駆動装置。
【請求項3】
前記第1付勢部材は、前記第1及び第2ステータの間に配置され前記第1及び第2ステータを互いに反対方向に付勢する、請求項1又は2の羽根駆動装置。
【請求項4】
前記第1及び第2軸は、平行であり、
前記第1及び第2ステータは、前記第1及び第2軸に直交する方向に並んでおり、
前記第1付勢部材は、前記第1及び第2軸に直交する方向に前記第1及び第2ステータを付勢する、請求項1乃至3の何れかの羽根駆動装置。
【請求項5】
前記第1及び第2アクチュエータを支持し前記基板に設けられた支持部と、
前記第1及び第2アクチュエータを前記支持部に向けて付勢し、前記第1付勢部材が前記第1及び第2アクチュエータを付勢する方向とは直交する方向に付勢する第2付勢部材とを備えた、請求項1乃至4の何れかの羽根駆動装置。
【請求項6】
前記支持部に固定され前記第1及び第2アクチュエータを覆い前記第2付勢部材を保持したカバー部を備えた、請求項5の羽根駆動装置。
【請求項7】
前記第1及び第2アクチュエータを支持し前記基板に設けられた支持部と、
前記支持部に固定され前記第1及び第2アクチュエータを覆うカバー部と、
前記第1及び第2アクチュエータを前記カバー部に向けて付勢し、前記第1付勢部材が前記第1及び第2アクチュエータを付勢する方向とは直交する方向に付勢する第2付勢部材とを備えた、請求項1乃至4の何れかの羽根駆動装置。
【請求項8】
前記第1及び第2アクチュエータを前記第1及び第2軸に直交し、前記第1付勢部材が前記第1及び第2アクチュエータを付勢する方向とは直交する方向に付勢する第3付勢部材を備え、
前記支持部は前記第3付勢部材を保持する、請求項1乃至7の何れかの羽根駆動装置。
【請求項9】
前記羽根は、複数の羽根から構成され前記第1アクチュエータによって駆動する第1羽根群、複数の羽根から構成され前記第2アクチュエータによって駆動する第2羽根群、を含み、
前記第1羽根群は、互いに重なった状態で前記開口から退避し、展開した状態で前記開口を覆い、
前記第2羽根群は、互いに重なった状態で前記開口から退避し、展開した状態で前記開口を覆う、請求項1乃至8の何れかの羽根駆動装置。
【請求項10】
前記第1及び第2ステータは、それぞれ、前記第1及び第2軸方向に重なる複数の部品で構成される、請求項1乃至9の何れかの羽根駆動装置。
【請求項11】
前記第1付勢部材は、ゴム、発泡部材、非磁性体のバネ部材の少なくとも一つである、請求項1乃至10の何れかの羽根駆動装置。
【請求項12】
請求項1乃至11の何れかの羽根駆動装置を備えた光学機器。
【請求項1】
開口を有した基板と、
前記開口から退避した位置と前記開口の少なくとも一部を覆う位置との間を移動可能な羽根と、
第1軸を中心に回転可能な第1ロータ、第1ステータを含み、前記羽根を駆動可能な第1アクチュエータと、
第2軸を中心に回転可能な第2ロータ、第2ステータを含み、前記羽根を駆動可能な第2アクチュエータと、
前記第1及び第2アクチュエータをそれぞれ位置決めする第1及び第2位置決め部と、
前記第1及び第2アクチュエータをそれぞれ前記第1及び第2位置決め部に向けて付勢する第1付勢部材と、を備えた羽根駆動装置。
【請求項2】
前記第1及び第2位置決め部は、それぞれ前記第1及び第2ステータを位置決めし、
前記第1付勢部材は、前記第1及び第2ステータをそれぞれ前記第1及び第2位置決め部に向けて付勢する、請求項1の羽根駆動装置。
【請求項3】
前記第1付勢部材は、前記第1及び第2ステータの間に配置され前記第1及び第2ステータを互いに反対方向に付勢する、請求項1又は2の羽根駆動装置。
【請求項4】
前記第1及び第2軸は、平行であり、
前記第1及び第2ステータは、前記第1及び第2軸に直交する方向に並んでおり、
前記第1付勢部材は、前記第1及び第2軸に直交する方向に前記第1及び第2ステータを付勢する、請求項1乃至3の何れかの羽根駆動装置。
【請求項5】
前記第1及び第2アクチュエータを支持し前記基板に設けられた支持部と、
前記第1及び第2アクチュエータを前記支持部に向けて付勢し、前記第1付勢部材が前記第1及び第2アクチュエータを付勢する方向とは直交する方向に付勢する第2付勢部材とを備えた、請求項1乃至4の何れかの羽根駆動装置。
【請求項6】
前記支持部に固定され前記第1及び第2アクチュエータを覆い前記第2付勢部材を保持したカバー部を備えた、請求項5の羽根駆動装置。
【請求項7】
前記第1及び第2アクチュエータを支持し前記基板に設けられた支持部と、
前記支持部に固定され前記第1及び第2アクチュエータを覆うカバー部と、
前記第1及び第2アクチュエータを前記カバー部に向けて付勢し、前記第1付勢部材が前記第1及び第2アクチュエータを付勢する方向とは直交する方向に付勢する第2付勢部材とを備えた、請求項1乃至4の何れかの羽根駆動装置。
【請求項8】
前記第1及び第2アクチュエータを前記第1及び第2軸に直交し、前記第1付勢部材が前記第1及び第2アクチュエータを付勢する方向とは直交する方向に付勢する第3付勢部材を備え、
前記支持部は前記第3付勢部材を保持する、請求項1乃至7の何れかの羽根駆動装置。
【請求項9】
前記羽根は、複数の羽根から構成され前記第1アクチュエータによって駆動する第1羽根群、複数の羽根から構成され前記第2アクチュエータによって駆動する第2羽根群、を含み、
前記第1羽根群は、互いに重なった状態で前記開口から退避し、展開した状態で前記開口を覆い、
前記第2羽根群は、互いに重なった状態で前記開口から退避し、展開した状態で前記開口を覆う、請求項1乃至8の何れかの羽根駆動装置。
【請求項10】
前記第1及び第2ステータは、それぞれ、前記第1及び第2軸方向に重なる複数の部品で構成される、請求項1乃至9の何れかの羽根駆動装置。
【請求項11】
前記第1付勢部材は、ゴム、発泡部材、非磁性体のバネ部材の少なくとも一つである、請求項1乃至10の何れかの羽根駆動装置。
【請求項12】
請求項1乃至11の何れかの羽根駆動装置を備えた光学機器。
【図1】


【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−3163(P2013−3163A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−130548(P2011−130548)
【出願日】平成23年6月10日(2011.6.10)
【出願人】(396004981)セイコープレシジョン株式会社 (481)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月10日(2011.6.10)
【出願人】(396004981)セイコープレシジョン株式会社 (481)
【Fターム(参考)】
[ Back to top ]