
耳道を再構成する方法およびコンピュータ読み出し可能プログラム記憶装置
【課題】より正確に耳道を再構成する方法を提供する。
【解決手段】3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットを提供し、OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号を抽出し、1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号を受信し、耳スキャンマーカフレーム番号および耳スキャンマーカフレームライン番号および基準マーカフレーム番号および基準フレームライン番号からOCT耳スキャンに関する開始位置および開始方向を求め、各スキャンラインに関して、最大干渉強度値のピクセル番号を発見し、スキャンガイドからのピクセルのオフセット距離を求め、距離オフセットデータから耳道の表面を再構成する。
【解決手段】3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットを提供し、OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号を抽出し、1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号を受信し、耳スキャンマーカフレーム番号および耳スキャンマーカフレームライン番号および基準マーカフレーム番号および基準フレームライン番号からOCT耳スキャンに関する開始位置および開始方向を求め、各スキャンラインに関して、最大干渉強度値のピクセル番号を発見し、スキャンガイドからのピクセルのオフセット距離を求め、距離オフセットデータから耳道の表面を再構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、耳道を再構成する方法および耳道を再構成するステップを実施するコンピュータにより実行可能なプログラム命令を具体的に実装しているコンピュータ読み出し可能記憶装置に関する。
【背景技術】
【0002】
現在アメリカ合衆国内の約2,100万人の人々、また学齢期の子供の1,000人に30人が聴覚障害に苦しんでいる。65歳になると3人に1人が難聴であり、また補聴器の恩恵を受けられるであろうそれらのうちの75%の人々は補聴器を使用していない。難聴の人々は支援を求める前に平均して7年も待機している。孤立化、引き籠りまた鬱病が聴覚障害に対する共通した反応である。さらに、聴覚障害の人は聴覚に障害のない人に比べて離婚率が高い。この状況は技術的な手段を用いることにより聴取りプロセスが可能な限り自然なものに近くなる必要があることを示唆している。人間の聴覚器官はたとえ極限状態の環境においても音響的なコミュニケーションが取れるように進化してきた。長年の研究により聴取りプロセスに関する多くの本質的な秘密が解明された。この知識により現代の補聴器の技術的な発展に関する基礎が提供される。補聴器、また全ての医療分野に関係する技術は進歩し続けている。
【0003】
種々の大きさの補聴器が存在する。補聴器を使用する人はそれぞれ適切な装着感および機能のために特注の補聴器シェルを必要とし、またいずれの補聴器も良好な装着感を保証するために耳の型を必要とする。目下のところ医師は耳道に小発泡ブロックを挿入することにより耳の物理的な型を取っている。耳道には続いてシリコン材料が充填される。数分後に材料が取り出され、その型が耳型モデリング工場または補聴器製造業者に送られ、そこにおいて3Dデータファイルを生成するためにスキャンされる。このような耳道または耳介の3D表現は、患者のために製造される特注の補聴器の外部シェルを製造するために使用することができる。しかしながら、現行の方法は技術的に非常に注意を有するものであり、したがって成型される型の不正確性は希なものではない。したがって、耳穴型(I−T−E)補聴器を装着する患者の耳の穴の幾何学を表すディジタルデータの精確な「点群」を補足する、特許によって保護されるスキャニング装置を提供することが所望される。さらには、型を補聴器製造業者に送る必要があるので、搬送コストおよび時間的な遅れは不可避である。また、型に含まれる情報を完成された補聴器に変換する工場での集中的な処理に起因する誤りまた労働賃金も生じる。医者の診察室にI−T−Eスキャニング装置を設置することによって、各耳道および耳介に関する幾何学的なデータの「点群」セットを迅速に収集することができ、また例えばインターネットを介してEメールで補聴器製造業者に送信することができる。
【0004】
光干渉断層法(OCT)は新しい高解像の度撮像技術であり、この技術により高解像度で組織の断面をリアルタイムに撮像することができる。OCTは商業的に利用可能なシステムにおいて10μmの高解像度で2〜3mmの深さの最小侵襲撮像を実施するための一種の「光学生検」として使用される。OCTはカテーテルプローブや撮像用針のような光ファイバ装置において使用することができる近赤外線光を使用する。この新たな撮像技術は癌の発見や診断を改善する可能性を有しており、また殊に瞳孔を介する検査に関する目の光学的な特性および網膜の接触性に基づき眼科学において有用である。OCTはまた人間の耳の3Dモデルに関して寸法を提供する可能性も有している。OCTスキャナを一連の断面画像を収集するために使用することができる。これらの2D画像を3D体積に合成し、耳の表面を抽出することができる。人間の耳道および耳介を表す3Dの点群ファイルは特注の補聴器を作成するために使用することができる。
【0005】
OCTは超音波撮像に類似するものであり、音響波の代りに赤外線光の輝度を測定する。超音波パルスの伝播および検出を時間遅延で表すことができるが、OCTは後方散乱光のエコー遅延時間を高解像度で測定するための低コヒーレンス干渉法として公知である干渉計相関技術を使用する。光の速度は非常に速いので、反射のエコー時間遅延を電子的に直接測定することは不可能である。
【0006】
上述したように、OCTは超音波の原理と顕微鏡の撮像性能および臨床医には周知である形状因子を組み合わせたものである。超音波が後方散乱音「エコー」から画像を形成するのに対し、OCTは生体の組織内の微小構造から反射される赤外線光波を使用する。OCTによって生成される断面画像は超音波撮像による画像と類似するが、OCTの画像解像度は1〜15μmであり、これは慣例の超音波よりも2オーダ程度まで高いものである。OCTの撮像深さは組織の光散乱特性および減衰特性によって制限されているにもかかわらず、最も非透過なサンプルにおいても2mmまたは3mmの画像浸透(image penetration)を達成することができる。眼を含む透過性の組織では、2cmを越えるプロービング深さが実証されている。超音波技術はOCTの能力を遙かに越える深さからの情報を提供することができるが、多くの用途においてはそのような解像度もあらゆる有用な情報をもたらすには十分ではないことに議論の余地はない。さらには超音波装置と検査されている組織は物理的に接触していなければならないが、OCTでは変換媒体は必要とされないので、空気を介して直接的に撮像を実施することができる。
【0007】
OCTの別の利点は、生検を実施する必要なく構造を診察できることである。切採生検および組織病理学のために臨床医は組織の試料を採取し、この試料が薄いスライスに切断され、顕微鏡のもとで検査される。慣例の生検方法に比べて、OCTは組織病理学の解像度に迫る解像度でもってin situでかつリアルタイムで組織を撮像することができる。多くの環境、例えば脳においては、切採生検方法は非常に危険である可能性があり、それどころか不可能である虞があるが、これをOCTスキャニングに代替させることができる。OCT技術は光ファイバ技術をカテーテル、内視鏡、腹腔鏡および外科用プローブと容易に調和させることができるので、非侵襲性かつ最小侵襲性の手法により身体の殆ど全ての側面において実施することができる。
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明の課題は、より正確に耳道を再構成する方法およびこの方法を実施するコンピュータにより実行可能なプログラム命令を具体的に実装しているコンピュータ読み出し可能記憶装置を提供することである。
【課題を解決するための手段】
【0009】
方法に関する課題は、方法が、3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで3Dデータセットの値は干渉強度を表し、OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号を抽出するステップを有し、1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号を受信するステップを有し、耳スキャンマーカフレーム番号および耳スキャンマーカフレームライン番号および基準マーカフレーム番号および基準フレームライン番号からOCT耳スキャンに関する開始位置および開始方向を求めるステップを有し、各スキャンラインに関して、最大干渉強度値のピクセル番号を発見し、スキャンガイドからのピクセルのオフセット距離を求めるステップを有し、距離オフセットデータから耳道の表面を再構成するステップを有することによって解決される。
【0010】
また方法に関する別の課題は、方法が、光干渉断層法(OCT)システム用のスキャニングガイドを提供するステップを有し、ここでガイドは1つまたは複数のマーカをガイドの外面上に有し、スキャニングデータを使用して取得された中空較正対象のOCTスキャンデータを提供するステップを有し、ここでスキャンデータは3Dデータを形成するピクセルのフレームおよびラインを包含し、3Dデータの値は干渉強度であり、較正対象スキャンデータからOCTスキャンガイド上の1つまたは複数のマーカに対応する、干渉強度の基準フレーム番号および基準ライン番号を抽出するステップを有し、スキャニングガイドを使用して取得された光干渉断層法(OCT)耳スキャンデータのセットを提供するステップを有し、ここでスキャンデータは干渉強度値の3Dデータセットを包含し、OCTスキャンガイド上の1つまたは複数のマーカに対応する干渉強度のフレーム番号およびライン番号をOCT耳スキャンデータから抽出するステップを有し、OCT耳スキャンに関する開始位置および開始方向を、1つまたは複数のマーカの耳スキャンフレーム番号および耳スキャンライン番号および1つまたは複数のマーカの基準フレーム番号および基準フレームライン番号から求めるステップを有することによって解決される。
【0011】
耳道を再構成するステップを実施するコンピュータにより実行可能なプログラム命令を具体的に実装している、コンピュータ読み出し可能記憶装置に関する課題は、前述のステップが、3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで3Dデータセットの値は干渉強度を表し、OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号を抽出するステップを有し、1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号を受信するステップを有し、耳スキャンマーカフレーム番号および耳スキャンマーカフレームライン番号および基準マーカフレーム番号および基準フレームライン番号からOCT耳スキャンに関する開始位置および開始方向を求めるステップを有し、各スキャンラインに関して、最大干渉強度値のピクセル番号を発見し、スキャンガイドからのピクセルのオフセット距離を求めるステップを有し、距離オフセットデータから耳道の表面を再構成するステップを有することによって解決される。
【発明を実施するための最良の形態】
【0012】
本明細書において記載されている本発明の実施例は一般的に、光干渉断層法(OCT)を使用することにより人間の耳の3Dモデルを形成する方法およびシステムを含む。OCTは物質および生物系の内部微小構造の高解像度での断面の断層撮像を後方散乱光または後方反射光の測定によって実施する。OCTスキャナは一連の断面画像を収集し、これらの2D画像を3D体積に合成し、耳の表面を抽出するために使用され、補聴器を適切に成形するために耳道および外耳の正確なモデルを提供する。再構成処理は2つの重要なスキャニングパラメータ、すなわちプローブヘッドの位置と、スキャン処理の間に光が放射および反射された方向の知識とを要求する。これらのスキャニングパラメータを確実に求めるための較正方法が発明されている。開発されたプロセスの評価は、正確なパラメータが計算され、耳道を満足のいく結果で再構成できることを示す。人間の耳道および耳介を表す3Dの点群ファイルを特注の補聴器の製作に使用することができる。
【0013】
本発明の1つの態様によれば耳道を再構成する方法が提供され、この方法においては、その値が干渉強度を表す3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットが提供され、OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号が抽出され、前述の1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号が受信され、耳スキャンマーカフレーム番号および耳スキャンマーカライン番号および前述の基準マーカフレーム番号およびライン番号から前述のOCT耳スキャンに関する開始位置および開始方向が求められ、各スキャンラインに関して、最大干渉強度値のピクセル番号が発見され、前述のスキャンガイドからの前述のピクセルのオフセット距離が求められ、前述の距離オフセットデータから前述の耳道の表面が再構成される。
【0014】
本発明の別の態様によれば、ガイドからのピクセルjのオフセット距離dが次式より計算される。
【数1】

ここでd0はガイドの中心からのオフセットであり、dsはサンプリングレートである。
【0015】
本発明の別の態様によれば、耳道の表面を次式より再構成することできる。
【数2】
ここで、p→(i,j)はガイドに垂直なスキャンラインiを表し、jはスキャンラインに沿ったピクセルを表し、p→0はスキャンの空間内の開始位置であり、c→(t)はガイドの湾曲した経路であり、tはスキャンラインiに対応するガイド上の位置であり、またαはスキャンライン角度であり、u→およびv→は曲線c→(t)に垂直な平面における2D座標フレームを規定している相互に垂直な2つの単位ベクトルである。
【0016】
本発明の別の態様によれば、
【数3】
であり、ここでvは前述のガイド内に挿入されているスキャニングプローブのスキャン速度であり、fはスキャンラインサンプリング周波数であり、また、
【数4】
であり、ここでωはプローブの角回転速度である。
【0017】
本発明の別の態様によれば、単位ベクトルu→およびv→は次式によって定義される。
【数5】
ここで、w→は如何なる時点においても曲線c→(t)に垂直でないベクトルであり、またt→は、
【数6】
として定義される曲線のタンジェントである。
【0018】
本発明の別の態様によれば、OCTスキャンデータは、回転可能なプローブが挿入されているガイドを含むOCTスキャン装置を提供し、前述のプローブを前述のガイドにスライドおよび回転させ、所定の間隔で前述のプローブから近赤外線光を放射し、基準信号を有する反射光の干渉を測定し、前述の干渉のデータをコンピュータ読み出し可能媒体に記憶することによって取得される。
【0019】
本発明の別の態様によれば、本方法においては各スキャンラインに対して所定の閾値を上回る干渉強度を有するピクセルが選択され、前述の選択されたピクセルの前述のスキャンガイドからのオフセット距離が求められる。
【0020】
本発明の別の態様によれば、本方法においては、スキャンラインに関する最大干渉強度値のピクセル番号の発見に先行して、スキャンラインの開始における強度値が破棄され、ここで開始値はスキャンガイド自体からの反射に対応する。
【0021】
本発明の別の態様によれば、基準マーカフレーム番号および基準ライン番号は較正対象のOCTスキャンデータから抽出された。
【0022】
本発明の別の態様によれば、較正対象のOCTスキャンデータからの前述の基準マーカフレーム番号および基準ライン番号の抽出において、0の角方向を表すためにマークされた較正対象の光干渉断層法(OCT)スキャンデータのセットが提供され、このスキャンデータは前述のガイドにおける1つまたは複数のマーカを有する較正ガイドを使用して取得された干渉強度の値を有する3Dデータセットを形成するピクセルのフレームおよびラインを包含し、前述の較正ガイド上の前述のマーカに対応する干渉強度のフレーム番号およびライン番号が抽出され、前述のフレーム番号および前述のライン番号から前述の較正ガイド上の前述のマーカの空間的な位置が求められる。
【0023】
本発明の別の態様によれば、ガイド上のマーカ位置は次式により計算される。
【数7】
ここでαは前述のガイドに関する回転角であり、αmarkerはマーカの角方向であり、tmarkerはマーカのフレーム番号であり、nSα=0は0の角方向でのスキャンラインのライン番号であり、nSstartは開始ライン番号であり、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFstartは開始フレーム番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である。
【0024】
本発明の別の態様によれば、開始位置tstartおよび開始方向αstartは次式によりマーカ位置tmarkerおよび方向αmarkerから計算される。
【数8】
ここで、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である。
【0025】
本発明の別の態様によれば、耳道を再構成するステップを実施するコンピュータによって実行されるプログラム命令を具体的に実施するコンピュータによって読み出し可能であるプログラム記憶装置が提供される。
【実施例】
【0026】
本明細書において説明する本発明の実施例は一般的に、OCTスキャニングデータおよび3D再構成アルゴリズムおよび評価プロシージャを用いて耳の表面を抽出するシステムおよび方法を含む。
【0027】
OCTは干渉相関技術を使用して後方散乱光および後方反射光の輝度およびエコー遅延時間を測定することによって撮像を実施する。発光ダイオード(LED)からの光が光ファイバに入力結合される。光は側路ビームに出力結合され、反射光および後方散乱光が再び光ファイバに入力結合される。光ファイバは面をスキャンするために回転し、また3D体積を測定するために移動されなければならない。回転する光ファイバを案内するスリーブが所定のスキャン経路に沿ってファイバを移動させるために使用される。ファイバから表面までの距離をスキャンデータから抽出できる場合、またスキャン経路の媒介変数曲線関数(parametric curve function)が既知である場合には、スキャンされた耳の表面の3D表現を計算することができる。
【0028】
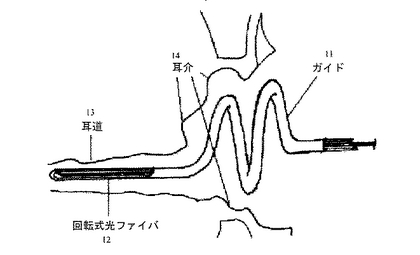
図1は本発明の実施形態による、耳をスキャニングするための例示的なOCTコンフィギュレーションを示す。図面を参照すると、回転する光ファイバ12を収容しているガイド11が甲介14および耳道13に挿入されている。種々の補聴器を製造するために、耳道および耳介を含む耳全体がスキャンされるべきである。測定された形状は約0.1mmの精度であることが望ましい。OCTシステムの範囲は制限されているので、外耳はスキャン経路が耳の形状により近いものとなるようにファイバを案内する湾曲したスリーブを使用してスキャンされるべきである。
【0029】
湾曲したスリーブを使用した場合に生じる問題の1つは、3D再構成を実施するためにスキャンが開始される位置と光が最初に送出された方向とが既知でなければならないことである。直線状のガイドが使用される場合には、スキャンが直線状の経路のどこにおいて開始されるかは3D再構成に関して差異を生じさせないのでこれら2つのパラメータは重要ではない。しかしながら湾曲したガイドが使用される場合には、OCTスキャンデータからこれらのパラメータを抽出するための較正プロシージャよりこれらのパラメータは求められるべきである。OCTスキャンデータに現れるガイド上の特別なマーキングを有するガイドを較正することができ、この際マーキングデータは未知のパラメータに関する情報を提供する。
【0030】
物理的な基本
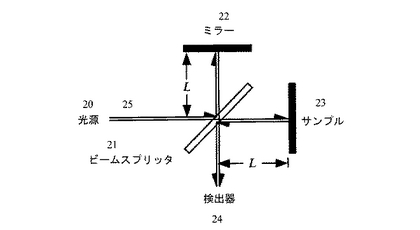
光ファイバマイケルソン干渉計と接続されている広帯域スーパールミネセンスダイオード(SLD)からの低コヒーレント光を使用する例示的なOCTシステムが図2に示されている。図面を参照すると、光源20が近赤外線ビーム25を放射し、この近赤外線ビーム25がファイバカプラ21によって分割され、一方のビームが基準アーム22に送出され、他方のビームがサンプルアーム23に送出される。基準ビームは既知の距離にあるミラーにより反射され、検出器24に戻される。サンプルビームは検査される組織内の種々の層により後方に反射される。低コヒーレンス光源を使用し、また組織から反射された光と基準ミラーから反射された光との干渉を測定することにより、サンプルの内部から光子が後方散乱された場所の情報を抽出することができる。
【0031】
光源のコヒーレンス長は非常に短いので、信号パス長と基準パス長が等しい場合にのみ干渉が生じる。これらのパス長が異なる場合には干渉は存在しない。基準アーム内のミラーを移動させることによって、したがって基準アームにおいて光をカバーする距離を変更することによって、組織内の種々のポイントから後方散乱光の干渉の強度が記録され、サンプルの縦方向のスキャンが実施される。干渉信号がバンドパスフィルタおよび包絡線検出を用いて復調され、続いて事前処理のためにコンピュータにおいてディジタル化されて記憶される。OCTシステムは−100dBまでの感度を有し、このことは10-10の放射光出力と同じくらい小さい反射信号を検出できることを意味している。2次元画像に関するデータを受信するために、一連の縦方向スキャンがスキャンの間に横方向に移動される光ビーム位置でもって実施される。この場合データセットは擬似カラー画像またはグレースケール画像として表される。
【0032】
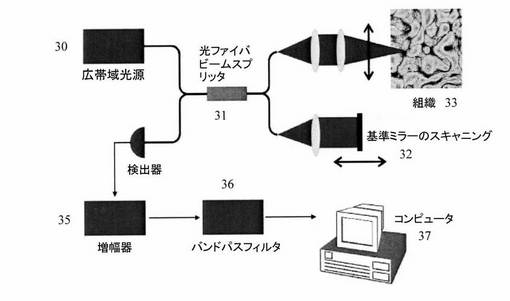
全体のOCTシステムの概略図が図3に示されている。図面を参照すると、広帯域赤外線光源30が近赤外線ビームを放射し、この近赤外線ビームが光ファイバビームスプリッタ31によって分割され、一方のビームがスキャニング基準アーム32に送出され、他方のビームが組織サンプル33に送出される。基準ビームは既知の距離にあるミラー32によって反射され、検出器34に戻され、この検出器34において基準ビームが組織サンプル33内の種々の位置からの後方散乱光と干渉する。干渉信号が増幅器35によって増幅され、バンドパスフィルタ36によって復調され、コンピュータ37においてディジタル化されて記憶される。
【0033】
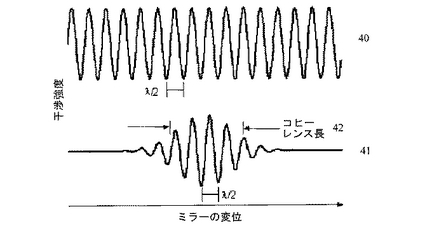
低コヒーレンス光源に基づき、信号は遅延の不一致とともに急速に減衰するので、空間的な特性を非常に精確に抽出することができる。図4は一方でコヒーレントな光によって惹起される干渉信号を比較し、他方で低コヒーレントな光をどのようにして高解像度の後方反射の位置を求めるために使用できるかを実証するために低コヒーレントな光が比較される。上部に示されている信号40は、マイケルソン干渉計セットアップにおけるミラーがさらに移動してまたさらに戻ってくる場合に、非常にコヒーレントな光源に関して画面上で観察される干渉を示す。グラフはミラーの変位の関数としての信号の干渉強度を示す。下部の信号41はコヒーレンス長42を示す低コヒーレンス光源を使用する場合に観察される干渉を示す。低コヒーレンスな干渉計と関連する干渉は、干渉計の2つのアームの光路長が正確に一致する場合にのみ観察することができるので、このセットアップを距離測定方法として適用することができる。
【0034】
OCTにおける深さ解像度は光源のコヒーレンス長によって規定される。ガウススペクトルを有する光源に関するコヒーレンス長LCは以下のように定義される。
【数9】
ここで、λは中心波長であり、Δλは半値全幅(FWHM)スペクトル帯域幅であり、nは屈折率である。
【数10】
として定義される画像深さ解像度Δzはコヒーレンス長に比例し、したがって光源の帯域幅に反比例する。
【0035】
深さ解像度は使用される光源の中心波長および帯域幅に依存して主としてμmのスケールである。非透過性の組織の光学的な撮像は組織の散乱および吸収に基づき難儀である。OCT撮像に関して関心となるスペクトル領域は約1.3μmの波長の近赤外線(NIR)であり、この波長領域においては可視光に関して光散乱が低く、また組織の吸収も同様に低く、達成されるべき3mmの深さまでの侵入が許容される。
【0036】
表面抽出
本発明の実施形態によれば、例示的な実験スキャンがLightLab Optical Coherence Tomography Imaging - System Model M2-Cardiologyを使用して取得された。このOCTシステムは1295nmの波長において動作し、この波長は患者インタフェースユニットにおいて測定される11mWの光輝度を生じさせるスーパールミネセンスLEDによって生成される。
【0037】
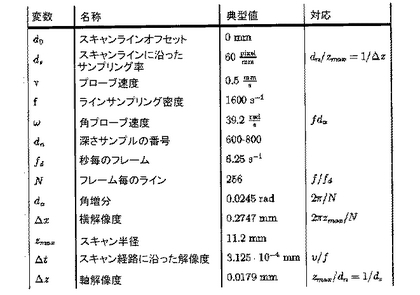
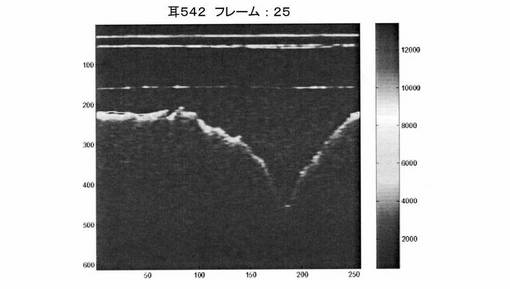
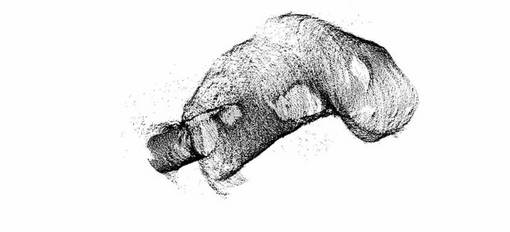
耳道および耳介の全体の体積をスキャンするために、SLDからの光が入力結合される光ファイバが回転しつつ、直線状のスリーブへと引き戻される。例示的で非制限的な速度は約0.5mm毎秒である。測定されたスキャンラインはスキャン経路に沿った3.125×10-4の解像度および1.4063°の角解像度を有する密ならせん体上に配置されている。そのようなOCT装置を用いてスキャンすることができるフィールドの深さ(DOF)は11.2mmであり、これによりライン毎に625のサンプルとともに0.0179mmの深さ解像度が得られる。図5は本発明の実施形態による、例示的で概略的なOCT撮像幾何学である。光ファイバは回転するので、フレーム毎にN個のスキャンラインがΔxの横解像度およびΔzの軸解像度で取得される。図6はOCTを特徴付ける他の物理量の表を例示値と共に示したものである。実験スキャンをマルチフレームTIFF画像として記憶することができ、各々の画像がサンプル毎に16ビットの2D画像を有する。OCTスキャンから取得された例示的なTIFF画像フレームが図7に示されている。各フレームはスキャニングプローブが1回転する内の全てのスキャンラインに関する反射光の輝度を示す。光ファイバからの反射およびこのファイバを案内するスリーブの内面ならびに外面からの反射を含む各スキャンラインにおける第1のサンプルが破棄されると、光を反射している耳の表面の位置を示し高い輝度を有する1つのスポットを各スキャンラインにおいて発見することができる。
【0038】
これらのスポットの位置を抽出して、これらのスポットから3D点群を生成することによって3D再構成を実施することができる。各スキャンラインの最大輝度を選択する前に、ノイズのあるデータセットがサイズ5で標準偏差σ=2の対称性のガウスローパスフィルタを使用することにより平滑化される。以下の記述においてはOCTスキャンデータが2次元の配列s(i,j)として表され、iはスキャンライン番号であり、jはスキャンライン上の特定の測定点である。選択的に複数のフレームへの分割を放棄することができ、したがって全てのフレームのスキャンラインを追加することができ、これらのスキャンラインにはただ1つの変数iがインデクスとして付与される。複数のフレームへの分割が保持されるべき場合には、フレーム番号を識別するために第3のインデクスkを使用することによりデータを3次元の配列で記憶することができる。記憶されているスキャンラインにおける各ピクセル位置jに関してファイバからの距離を次式により簡単に計算することができる。
【数11】
ここでd0はファイバの中心からのオフセットでありdsはサンプリング率である。サンプリング率に関する例示的な単位はピクセル毎mmである。本発明の実施形態によれば、所定の閾値(例示的で非制限的な値として4000)を上回る各輝度値に関して、ファイバからの距離がこの式により計算され、中間対象ファイルに記憶される。このデータファイルは再構成アルゴリズムに取り入れられ、3D表面点群の計算に使用される。
【0039】
3D再構成
ファイバはスキャンプロセス中に変形しないユークリッド座標フレームのx軸に平行な直線状のものであると仮定すると、測定された各値s(i,j)の空間内の位置を次式により計算することができる。
【数12】
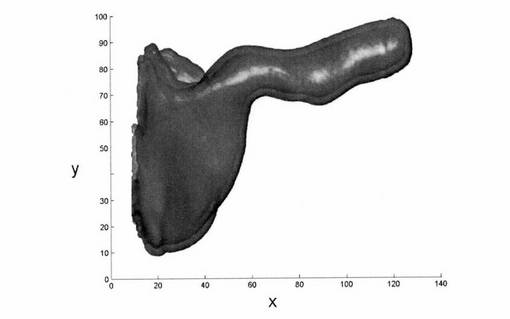
ここで、p→0はスキャンが開始される空間内の位置であり、vはプローブ速度であり、fはラインサンプリング周波数であり、ωはプローブの角速度であり、tはグラスファイバ上の位置であり、αはスキャンライン角度であり、tおよびαはいずれも特定のスキャンラインインデクスiに関するものである。例示的なサンプリング周波数の単位はライン毎秒である。図8は再構成された3D点群を示し、これは光ファイバを案内する直線状のスリーブを使用することによってスキャンされた耳モデルのOCTスキャンから取得されたものである。
【0040】
しかしながら、OCTシステムの範囲は制限されているので、直線状のガイドによっては外耳を十分にスキャンすることができない。本発明の実施形態によれば、考えられる1つの解決手段は図1に示した例示的なガイドのようなファイバを案内する湾曲したスリーブの使用であり、これによりスキャン経路は耳の形状により近くなる。この場合、再構成方法の一般形態を湾曲した経路の関数と組み合わせることができる。これまで使用した直線状の経路の代りに、3D位置p→(i,j)はいずれの固定のiに関して光ファイバに垂直なラインを表す。iが変化する間はプローブ速度で光ファイバが引き戻されるスリーブの周囲にらせん状にこれらのラインが配置される。したがって本発明の実施形態によれば、再構成式を次式のように表すことができる。
【数13】
ここでc→(t)はスリーブの湾曲した経路を表す。ここで媒介変数曲線関数c→(t)によって表される任意の経路上において光ファイバを引き戻すことができる。例示的で非制限的な関数をラインセグメントまたは湾曲したセグメントから、また自由形状曲線として区分的に規定することができる。ベクトルu→およびv→は相互に垂直な2つの単位ベクトルであり、曲線に垂直な面における2D座標フレームを規定し、これによりスキャンラインを面内で回転させることができる。ここでu→およびv→は全体の曲線経路にわたり一致しているべきである。すなわちこれらのベクトルは曲線関数について回転しない。本発明の実施形態によれば、如何なる時点においても曲線c→(t)とは垂直でないベクトルw→を規定することができる。本発明の実施形態によれば、タンジェント
【数14】
を平面座標系を導出するために使用することができる:
【数15】
ここで「×」はベクトル積を表す。
【0041】
湾曲したスキャン経路に関しては、再構成のためにデータを3D空間に合成するやり方に影響を及ぼす2つのパラメータが存在する。これらの2つのパラメータはOCTスキャンが開始されるスキャン経路上の位置tおよびファイバの相応の回転角α∈[0,2π]である。これらのパラメータは取得されたOCTデータセットには包含されていない。別の問題は湾曲したスリーブの製造公差から生じる。実際のスキャン経路が想定したスキャン経路とは異なる場合には3D再構成は不正確になる。再構成に必要とされる情報は以下のものが含まれる。
(1)ガイドの分析方程式が既知であり、製造されたガイドが所定の形状と正確に合致する。
(2)ガイド内のスキャンヘッドの位置と光が放射および反射された方向とがスキャンプロセスを通じて既知である。
【0042】
内耳および外耳をポイント毎に0.1mmの精度で再構成することが目標である。
【0043】
誤差評価
本発明の実施形態において再構成されたデータセットの精度を評価するために、再構成された3D点群とモデル対象のデータセットの間の誤差を評価することが必要とされる。OCTスキャンを検査するために提供された幾つかの耳のモデルも3D CTスキャンを有するので、これをモデルデータセットとみなすことができる。再構成されたデータセットをモデルデータセットと比較するために、これらのデータセットの座標系を一致させる必要がある。したがって、2つのデータセット間の誤差が計算される前に3D剛体変換を実施する必要がある。
【0044】
2つの点群は共通の座標系を使用しても取得されないので、2つのデータセットを比較するために3Dへの剛体変換が確立されるべきである。剛体変換を表す種々のやり方が存在する。本発明の実施形態によれば、3D剛体変換は自由度6、すなわち3つの回転角θx,θy,θzおよび3つの並行移動値(translational values)tx,ty,tzを有し、したがって6つのパラメータベクトル[tx,ty,tz,θx,θy,θz]Tによって完全に表される。このパラメータ化はオイラー角表現として公知である。同時座標を使用することにより、剛体変換は線形マッピングとなる:
【数16】
変換行列Ttransを3×3の回転行列および3×1の並進ベクトルを含む4×4の行列によって表すことがきる:
【数17】
ここで、sx=sin(θx),cx=cos(θx),sy=sin(θy),cy=cos(θy),sz=sin(θz),cz=cos(θz)である。第4列は[0,0,0,1]で表されている。つまりこの第4列はこの剛体変換における遠近法的な部分ではない。
【0045】
行列乗算が交換可能でない、すなわちRxRyRzγRzRyRxであるのでオイラー角表現は固有のものではなく、またオイラー角がギンベルロック現象(Gimbel lock phenomenon)による影響を受けることを言及しておく:対象ポイントが最初に
【数18】
だけx軸について回転され、続いて
【数19】
だけy軸について回転され、角度θxおよび角度θzは同一の軸について回転し、したがってx軸およびz軸についてのそれぞれの回転をもはや識別することができない。しかしながら、オイラー角表現はそのようなクリティカルな角度を含む変換が使用されないので十分である。
【0046】
本発明の実施形態によれば、再構成データセットとモデルデータセットとの間の誤差を2つのデータセットにおける各ポイントの距離の合計を計算することによって測定することができる。空間内のあらゆるポイントからモデルデータセットまでの距離を照合するための高速な方法が望ましい。本発明の実施形態によれば、モデルデータセットから距離体積を構成することができる。この距離体積の構成は如何なる時でも制限を受けることなく良好に実施することができ、また非常に高い精度を有するモデルの表現をもたらす。
【0047】
本発明の実施形態によれば、モデルとの距離はkdツリーを使用することによって計算されるので、距離体積内の各ボクセルに関してモデルデータセット内の最も近いポイントが求められる。この方法は計算が困難な未組織のデータセットの三角測量表面表現を必要としない。しかしながら、距離が未サインであり、またサンプリングポイントまで常に幾つかの距離が存在するためにモデル表面においては距離値が0ではないことは欠点である。計算された未サインの3D CT耳スキャンの距離体積を特定の距離値から等価面を生成することによって視覚化することができ、これは図9に示されている。
【0048】
再構成されたデータセットとモデルデータセットとの間の誤差を、3次補間(trilinear interpolation)を使用して事前に計算された距離体積における距離を参照し、これらを加算し、再構成されたポイントの数で除算することによって計算することができる。
【0049】
較正
上述したように、OCTスキャンデータから耳道および耳介を再構成できるようにするために、スキャン経路の分析方程式がガイドの実際の形状と一致するようにガイドが可能な限り正確に製造されることが保証されなければならず、またスキャニングプロセスが開始されたパスの位置および光が最初に放出された方向が可能な限り正確に規定されなければならない。スキャニングプロセスの開始位置および開始方向を求めるために、ガイド上に特別なマーキングを有する較正ガイドが発明されており、これによりこのガイドを用いて各スキャンにおいて現れる開始位置および開始角度を識別することができる。例示的なマーキングがガイドの表面にレーザエッチングされ、表面に凹みが形成される。これらのエッチングされた凹みからの反射は、ガイドからの表面反射と容易に区別することができる。較正対象のマーキングがスキャンデータ内に生じるので、較正スキャンの開始位置および開始角度を容易に抽出することができる。較正スキャンの開始位置および角度を知ることによって、スキャンデータにおいても現れるガイド上のマーカ位置を計算することができる。既知のマーカ位置は各スキャニングプロセス中のプローブヘッドの開始位置および開始方向の抽出に役立つので、較正されたガイドを耳の表面のスキャニングに使用することができる。
【0050】
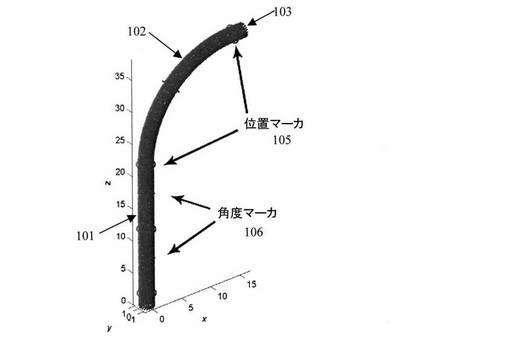
本発明の実施形態による例示的で非制限的な湾曲した較正ガイドは図10に示されており、そのガイド上に2種類のマーキングを有する。ポジションマーカ105はリングとして相互に所定の間隔をおいて設けられている。角度マーカ106はガイドの側方に配置されている。ガイドは可能な限り正確に製造されるべきである。製造プロセスにおける不正確性を回避するために、ガイドの中心線は1つの平面にのみ存在する。ガイドの第1の部分101は長さ22mmの直線状のものであり、この第1の部分に続く第2の部分102は半径15mmの四分円の形状のものであり、また続く第3の部分103は2mmの長さで再び直線状のものである。ガイドの全体の長さは合計47.55mmであり、ガイドの外壁は1.588mmの半径を有する。本発明の択一的な実施形態によれば、図10に示されているようにマーカを配置する代わりに、3つのクロスをランダムにガイド上にレーザマークすることができる。
【0051】
例示的なガイドはポリカーボネートから製造されている。何故ならば、ポリカーボネートは熱成形することができ、また正確にレーザマークすることができるからである。他の管材料におけるレーザマーキングでは必要とされる良好で鮮明なラインは生じないであろう。ガイドの内部においてスキャニングヘッドが引き戻されるスキャン経路に関する媒介変数曲線関数c→(t)を3つの部分で表すことができる。
【数20】
ここで、tは経路の開始から経路上の目下の地点までの距離(mm)であり、θは四分円の中心を点tと結ぶ線とx軸との間の角度である。スキャン経路のパラメータ化は再構成プロシージャに必要とされるので、このパラメータ化は上述の再構成アルゴリズムに組み込まれている。
【0052】
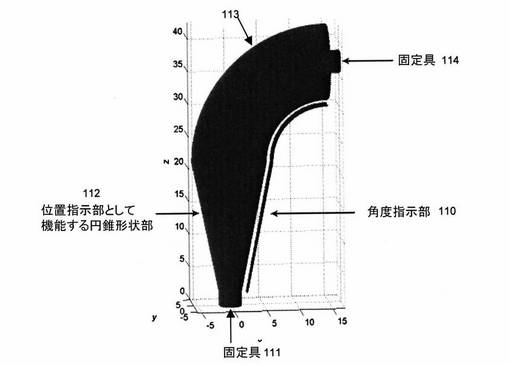
本発明の実施形態によれば較正対象も同様に発明されている。例示的で非制限的な較正対象が図11に示されており、またやはり2種類のマーキングを有している。円錐形状部112はスキャニングヘッドの位置を符号化し、また角度0を表す側面において1mmの深さを有する溝110が存在する。このことは、スキャン経路に垂直な平面を規定する単位ベクトルu→およびv→が計算され、α=0.0°の角度で光が送出された方向が求められる場合には考慮されるべきである。また較正対象上に2つの固定具111,114が設けられており、この固定具111,114を対象シェル内にガイドを再現するよう位置決めするために使用することができる。較正対象の2つの固定具は2mmの長さおよび1.588mmの半径を有し、構成ガイドと同じ幅を有する。z=0で始まる固定具111はセクション1と称され、また較正対象の端部における固定具114はセクション4と称される。円錐形状部112は20mmの長さを有し、またセクション2と称される。全長22mmにおいて最大半径5.588mmに達する。半径は一定であるが、較正対象はガイドと同様に四分円を形成する。部分113はセクション3と称される。例示的で非制限的な較正対象はアルミニウムからなる2つのシェル半部から製造された。
【0053】
本発明の実施形態による例示的で非制限的な較正方法はレーザマークされた較正ガイドを使用する少なくとも1回の構成スキャンを含む。上記において定義したような媒介変数曲線関数c→(t)によって表されるスキャン経路において光ファイバが引き戻された。較正対象を再構成するために、OCTスキャンが開始されるガイド上の位置およびファイバの対応する回転角を構成スキャンデータから抽出する必要がある。後続の計算のためにOCTスキャンデータのフレームへの分割が維持され、フレーム番号には変数nFがインデクスとして付され、また各フレームにおけるスキャンライン番号には変数nsがインデクスとして付される。スキャンライン番号は各フレームが256のスキャンラインを有するので1から256の値を取ることができる。フレーム番号はスキャンデータに依存する。
【0054】
構成スキャンに関する開始位置および開始角度を求めるためにスキャンを検査し、較正キャビティ内のスキャニングヘッドの所定の位置を表すフレーム番号およびスキャンライン番号を抽出する。較正対象に接しているガイドを用いることにより、較正ガイド内のプローブの位置も分かる。
【0055】
較正対象に関するスキャニングプロセスは較正ガイドの外で開始されたので、第1のステップはスキャンデータにおいてガイドが最初に現れる位置を特定する必要がある。しかしながらガイドは仕様に応じて要求されるものよりも長いので、スキャンデータ内のこの位置は媒介変数曲線関数c→(t)の開始位置t=0.0mmとは一致しない。したがってガイドが最初に現れるフレームを探す代わりに、較正対象の円錐形状部が始まるフレームを探すことができる。このフレームは溝が最初に現れるフレームなので非常に正確に選択することができる。
【0056】
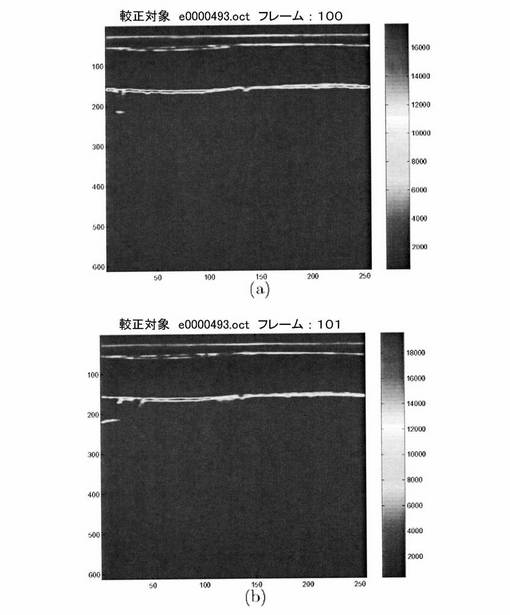
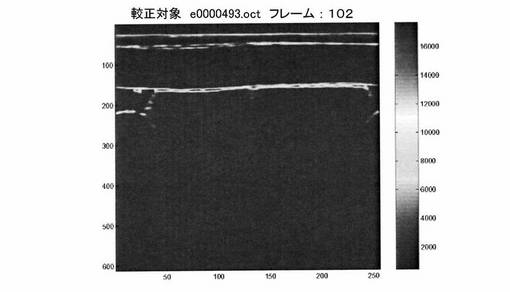
図12(a)は較正対象のセクション1からの反射光を観察することができる最後のフレームを示し、また図12(b)は円錐形状部の表面からの反射光を観察することができる最初のフレームを示す。溝が図12(b)の左側に見て取れる。どのスキャンラインが円錐形状部からの最初の反射光を含むのかという指示は存在しないので、このセクションの開始を0.08mmの精度で求めることができ、この精度はスキャン経路に沿った3.125×10-4の解像度の256倍に相当する。したがって0角度を示す溝の中心線を、較正対象の円錐形状部から光が最初に後方散乱された線と想定することができる。図13は較正対象の円錐形状部からの反射光を含む第2のフレームを示す。図13に示されているように、ns=0からns=30まで30のスキャンラインにわたり溝が延びているので、ns=15を溝の中心線として選択することができる。
【0057】
式(2)に基づき3D再構成を行うために、長さ47.55mmの最初に設計された較正ガイドからの最初の反射が検出されるであろうフレーム番号およびスキャンライン番号が計算されるべきである。この場合このスキャンラインにおける反射は位置c→(t=0.0)において送出された光の反射に対応する。スキャン経路Δtの解像度を次式のように定義することができる。
【数21】
ここでvはプローブ速度であり、fはラインサンプリング密度であり、またスキャン経路に沿った距離tをカバーするために必要とされるスキャンラインの数Nsを以下のように定義することができる。
【数22】
【0058】
プローブ速度を0.5mm/sとすると、それぞれが256スキャンラインを有するフレームは2mmの直線部分をスキャンするために必要とされる。較正対象のセクション2の開始を表すフレーム番号およびスキャンライン番号から25フレーム減算することによって、計算を容易に実施することができる。溝の中心線は円錐形状部からの最初の反射を表すスキャンラインであると想定され、また正確に25のフレームが較正対象のセクション1をスキャンするために必要とされるので、スキャニングプロセスはt=0.0mmの開始位置およびα=0.0°の角度に対応するフレーム76およびスキャンライン15において始まる。
【0059】
ここで較正対象を上述したように再構成することができる。各スキャンラインにおける最大輝度「ブライトスポット」を探す前に、光ファイバからの反射およびファイバを案内するスリーブの外表面と内表面からの反射は除去されるべきである。しかしながら、ガイドの外面からの反射スポットは、較正対象の固定具からの反射を含むフレームにおいては除去されない。固定具はガイドと同じ半径を有するので、ガイドの外面からの反射光と較正対象からの反射光は一致する。ガイドからの反射光がこれらのフレームにおいて除去されたならば、較正対象に関する情報も失われる可能性がある。したがって、ガイドの外面からの反射は2つの固定具からの反射が現れるフレームにおいては除去されないが、他の全てのフレームにおいては除去される。
【0060】
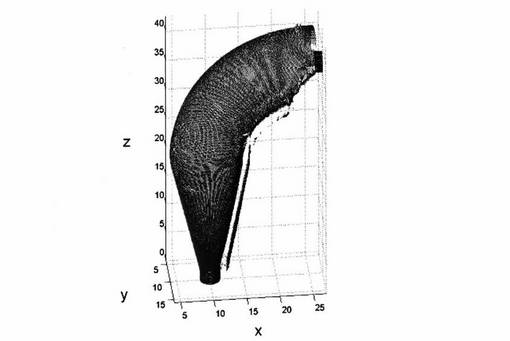
「ブライトスポット」に対応する距離を式(1)から計算することができる。開始パラメータを計算することができ、位置c→(t=0.0)において送出された光の反射が現れるフレーム番号およびスキャンライン番号を抽出することができ、またガイド上のマーカ位置を以下説明するように計算することができる。αstart=0.0°およびt=0.0mmで再構成された較正対象が図14に示されている。
【0061】
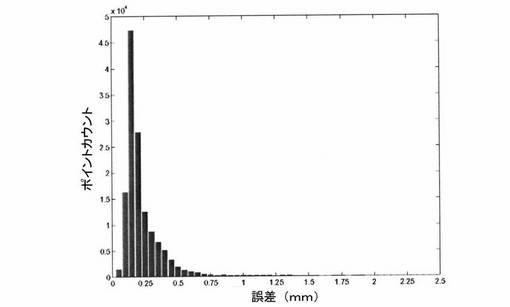
再構成された較正対象の精度を評価するために、上述したように誤差評価と関連させて、モデルデータセットの距離体積表現が計算されるべきである。図14は3D点群として示された例示的なモデルデータセットの距離体積表現を示す。距離体積の計算をオフラインで実施することができる。ガイドはスキャニングプロセスの間較正対象上の固定具と接触していたので、この時シェル内のガイドの位置は極めて正確に識別されている。再構成されたデータセットと距離体積表現の2つの座標系を整合させることによって、2つのデータセット間の誤差を上述したように計算することができる。再構成された3D点群とモデルデータセットとの間の誤差はポイント毎に平均して0.2418mmとなる。再構成されたデータセットとモデルデータセットとの間のポイント毎の誤差のヒストグラムが図15に示されている。最も誤差の多いポイントは較正対象のセクション2とセクション3との間の境界付近の領域およびセクション3とセクション4との間の境界付近の領域において累積されている。またこれらのポイントは溝を検出することができないセクション3の内側部分において収集されているこの部分においては溝からの反射はスキャンデータを抽出するには低すぎる。溝は固定具に取り付けられることによって回転されたことが想定される。このことは、再構成に必要とされる媒介変数曲線関数c→(t)のこの部分は光ファイバがスキャニングプロセス中に追跡された実際のスキャン経路とは異なることを意味し、これは較正対象の不正確な再構成に繋がる。しかしながら、再構成された較正対象の達成された全体の精度は十分である。
【0062】
前述したように、3つのクロスがガイド上にレーザマークされている。ガイド上のマーカ位置を計算するために、マーカが現れるフレーム番号およびスキャンライン番号を較正スキャンデータから抽出することが必要とされる。図16(a)から(e)は較正スキャンにおけるレーザマークされたクロスの発生を示す。各マーカは種々のフレームに現れるが、図面に示されているように主に5つまたは6つのフレームに現れる。マーカを最も良好に識別することができる真ん中のフレーム、図16(c)および中心センターラインにはガイド上のマーカ位置の計算が行われる。ガイド上のマーカ位置は次式を使用して計算することができる。
【数23】
ここでnsはライン番号であり、nFはフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である。殊に、nSα=0は溝マーカと所定の関係にある開始値を規定し、nFstartおよびnSstartは第1のマーカからの既知の距離、または選択的に第1のマーカ自体である所定の開始値を表す。上述の式における単位(rad,mm)は例示的なものであり、他の系単位を制限なく使用できるということを言及しておく。2つの較正データセットに関して例示的に計算されたマーカ位置が表として図17に示されている。2つの較正データセットから抽出されたマーカ位置は約0.08mmから約0.16mmまた約0.0245radから0.049rad異なる。0.08mmから0.16mmの偏差は1,2フレームの不正確性に相当し、また0.0245radから0.049radの偏差は1,2スキャンラインの不正確性に相当する。このことはセクション2の開始もしくはマーカ位置、または両方に関するフレーム番号およびスキャンライン番号の抽出を前述の精度で実施できることを意味している。
【0063】
耳スキャンデータの再構成
較正段階の後には、較正されたガイドを耳のスキャニングに使用することができる。3D再構成を実施する前に、スキャンデータを検査し、レーザマークされた3つのクロスが現れるフレーム番号およびスキャンライン番号を可能な限り正確に求めることによって、各スキャニングプロセスに対してスキャニングヘッドの開始位置および開始角度を求める必要がある。
【0064】
各マーカ位置に対応する開始位置および開始角度をマーカ1に関しては以下の例示的な定義から容易に計算することができる。
【数24】
【0065】
スキャンが移動してマーカを通過すると、較正に基づきガイドがパラメータ化されたガイドの位置において全ての撮像データを正確に空間内に位置決めおよびアライメントするためのマーカ情報を取得することができる。最適な場合には、開始位置および開始角度が3つの計算それぞれに対して同一であることが望ましい。しかしながら、マーカ位置のフレーム番号およびスキャンライン番号を正確に求めることはできないので、3つの計算から同一の結果が得られることはない。3つのスキャンから例示的に計算された開始パラメータが図18の表に示されている。表に示されているように開始位置に関する値は約0.5mmほど変化し、また開始角度は約35°の間隔で異なる。これらの偏差は、ガイドマーカが正確な位置を求めることができないクロスであるという事実を明らかにすることができる。マーカは6つまたは7つのスキャンにおいて現れるので、0.5mmの偏差は約4回転に相当し、したがって4つのフレームは不意のものではないので、またマーカは約40°の範囲に相当する約30のスキャンラインにわたり延びるので、35°の角度偏差も包含しうる。前述の変形に基づき、前述の3つの値を平均化することによって最終的な値を計算することができる:
【数25】
上述の式はスキャンがガイドの直線状の部分において開始される場合に使用される。スキャニングプロセスがガイドの他方の端部において開始されている場合には式を変形する必要があるが、これは容易な変換である。
【0066】
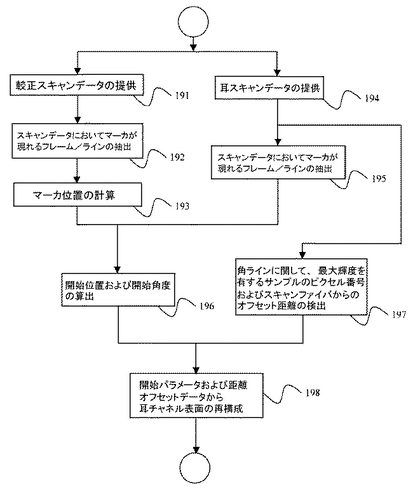
本発明の実施形態による耳の再構成プロセスのフローチャートが図19に示されている。最初に、耳をスキャニングするために使用されるガイドが較正される。ステップ191においては較正対象がOCTスキャナを用いてスキャンされ、較正スキャンデータセットが提供される。OCTスキャンデータのフレームおよびスキャンラインは3Dデータセットを形成し、その値は干渉強度である。ステップ192においては、ガイド上のマーカが現れるこれらのフレームおよびスキャンラインが抽出され、ステップ193においてはこの抽出によりガイド上のマーカ位置を式(3)および(4)より計算することができる。マーカが耳のスキャンデータ内に現れるので、この情報を、較正されたガイドを使用して記録されたあらゆる耳スキャンに関して開始位置および開始角度を計算するために使用することができる。較正マーカ位置を将来の使用のためにファイルに記憶することができる。較正対象を再構成するために、溝を含む較正対象のセクション2が始まるフレームおよびスキャンラインから開始パラメータを求めることができる。
【0067】
ステップ194においては耳がOCTスキャナを用いてスキャンされ、耳のスキャンデータのセットが提供される。このデータは3Dデータセットも形成し、また上述したようにこのデータをローパスフィルタを用いて平滑化することができる。ステップ195においては、ガイド上にマーカが現れるフレームおよびスキャンラインが抽出される。ステップ196においては、耳スキャンマーカ位置を較正スキャンマーカ位置と比較することにより、開始パラメータを式(5),(6)および(7)により計算することができる。ステップ197においては、各ラインおよび各フレームについてのサンプルデータが抽出され、最大輝度を有するサンプルのピクセル番号が発見される。最大輝度ピクセルの距離オフセットが式(1)により求められる。ガイドからの反射に対応する、各スキャンラインにおける開始サンプルをこのステップのために破棄できることを言及しておく。続いてステップ198において、ステップ196において得られた開始位置および開始方向を使用して、式(2)により距離オフセットデータから耳表面が再構成される。
【0068】
耳スキャンデータの評価
本発明の実施形態による耳の再構成方法の実験はシリコンから製造されたモデル耳を使用して実施された。図20(a)〜(f)は耳道および耳介に関する再構成された結果を示す。図面から見て取れるように、耳道を極めて良好に再構成することができる。図20(a)および図20(b)は2つの異なる視点からの同一の再構成された3D点群を示す。図20(c)、図20(d)、図20(e)および図20(f)は第2および第3のスキャニングプロセスからの再構成された3D点群をそれぞれ2つの異なる視点から示したものである。3つ全ての表現は殆ど同一に見える。耳道の表面表現には殆ど開口部が存在しない。
【0069】
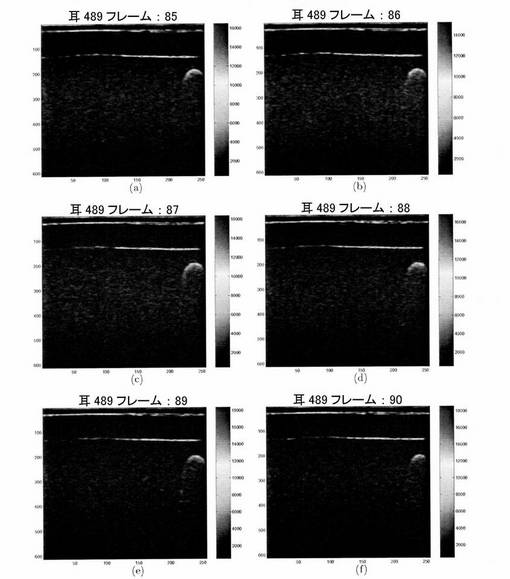
図21(a)〜(f)は耳介からの反射光が期待されたフレームを示す。外耳の表面は光ファイバからだいぶ離れており、また耳介から反射された光の測定された輝度は検出するにはあまりに低いので、耳介を再構成することはより困難である。これらのフレームを検査する場合には、図面から見てとれるように4000よりも高い僅かな輝度値のみを識別することができる。
【0070】
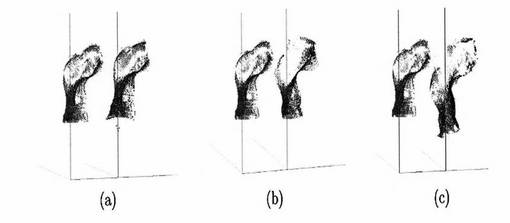
本発明の実施形態によれば、各スキャンに関してガイドの位置を変更して耳介の異なる部分をスキャンする、耳介部分の複数回のOCTスキャンを使用することができる。再構成された3D点群を耳介全体の3D表現を取得するために統合することができる。4つの異なる耳介からの再構成結果が図22(a)〜(c)に示されている。各グループの左側に示されている3D点群は同一のものであるが、右側に示されている3D点群は異なるスキャンデータから再構成されたものである。再構成された結果は耳介の同一の部分は殆どスキャンされており、その結果3Dデータセットの統合により耳介の形状に関するさらなる情報は提供されないことを示唆している。さらにはガイドの外面からの反射光がしばしば抽出されたことが示されている。これは各スキャンラインにおける最初のサンプルはガイド端部の外面から光を反射するところにおいては破棄されるべきではないためである。
【0071】
耳介をスキャンし、検出するには十分な強さである反射光の干渉信号を取得する別のやり方は、耳の形状にフィットする湾曲したガイドを設計することである。例示的なガイドは、スキャン経路が直線状のものよりも耳の形状により近くなるように、1つの線状セグメントおよび2つの環状セグメントを有する。別のアプローチは比較的長いDOFを有するOCT装置の使用である。
【0072】
ファイバからの反射ならびにガイドの内面および外面からの反射は各スキャンラインにおける最大輝度値を探す前に破棄される。しかしながらガイド表面からの反射は各スキャンラインに関する同一のサンプルにおいては現れないが、約10のサンプルにわたり変化する。さらにはガイドがしばしばスキャニングプロセス中に耳の表面と接触し、ガイドの外面からの反射が耳の表面からの反射と一致することが生じる。したがって、2つの反射が高輝度を有する1つのスポットとして現れる可能性がある。各スキャンラインにおいて不十分な数のサンプルが破棄される場合には、耳の表面からの反射光を表す輝度値を検出することはできないであろう。何故ならば、そのような輝度値はガイド表面からの反射を示す値よりも小さいからである。他方で過剰に多くのサンプルが破棄される場合にはガイドからの反射のみならず、対象からの反射も除去されるので、反射をもはや抽出することができない。しかしながら、ファイバからの反射およびガイドからの反射を破棄するために各スキャンラインにおける最初のサンプルを除外することは本発明の実施形態にとって十分であった。
【0073】
本明細書において説明した有利な実施形態および一般的な原理ならびに特徴についての種々の変更は当業者であれば容易に可能であると解される。したがって本発明は上述の実施形態に制限することを意図しておらず、本明細書において説明した原理および特徴と矛盾しない広範な範囲のものと認められる。
【0074】
さらには本発明を、ハードウェア、ソフトウェア、ファームウェア、特殊用途プロセッサまたはそれらの組み合わせの種々の形態で実施できると解される。1つの実施形態においては、本発明をコンピュータ読み出し可能プログラム記憶装置において具体的に実施されるアプリケーションプログラムとしてのソフトウェアで実施することができる。アプリケーションプログラムをあらゆる適切なアーキテクチャを有するマシンによってアップロードし、また実行することができる。
【0075】
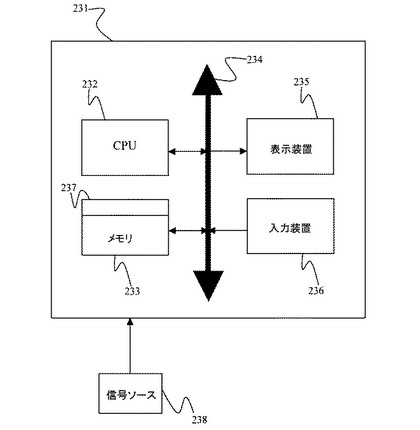
相応に図23は本発明の実施形態による、耳再構成プロセスを実施するための例示的なコンピュータシステムのブロック図である。ここで図23を参照すると、本発明を実施するコンピュータシステム231は殊に中央処理装置(CPU)232、メモリ233および入力/出力(I/O)インタフェース234を包含することができる。コンピュータシステム231は全般的にI/Oインタフェース234を介して表示装置235および種々の入力装置236、例えばマウスやキーボードと接続されている。支援回路はキャッシュ、電源、クロック回路および通信バスのような回路を包含することができる。メモリ233はランダムアクセスメモリ(RAM)、リードオンリメモリ(ROM)、ディスク駆動装置、テープ駆動装置などやそれらの組み合わせを包含することができる。本発明をメモリ233に記憶されているルーチン237として実現し、信号ソース238からの信号を処理するCPU232によって実行することができる。コンピュータシステム231自体は汎用コンピュータシステムであるが、本発明のルーチン237を実行しているときには特定用途向けコンピュータシステムになる。
【0076】
コンピュータシステム231はオペレーティングシステムおよびマイクロ命令コードも有する。本明細書において説明した種々のプロセスおよびファンクションはオペレーティングシステムを介して実行されるマイクロ命令コードの一部またはアプリケーションプログラムの一部(またはそれらの組み合わせ)でよい。さらには他の種々の周辺装置、例えば付加的なデータ記憶装置および印刷装置をコンピュータプラットフォームと接続することができる。
【0077】
さらには、図面に示されている幾つかの構成システム要素および方法のステップをソフトウェアで実現することができるので、システム要素(または処理ステップ)間の実際の関係を本発明がプログラミングされているやり方に依存して変更できると解される。本明細書に開示されている本発明の教示により、当業者であれば本発明の実施形態またはコンフィギュレーションまたそれらに類似するものを推考できるであろう。
【0078】
本発明を有利な実施例を参照しながら詳細に説明したが、当業者であれば本発明の精神および範囲から逸脱することなく、請求項によって定義されている限りにおいて本発明の種々の変更および置換を実施できることが分かるであろう。
【0079】
付記
本明細書において、p→(i,j)は
を表し、p→0は
を表し、c→(t)は
を表し、u→は
を表し、v→は
を表し、w→は
を表し、t→は
を表し、nSα=0は
を表し、nSstartは
を表し、nSmarkerは
を表し、nFstartは
を表し、nFmarkerは
を表し、c→(t=0.0)は
を表す。
【図面の簡単な説明】
【0080】
【図1】本発明の実施形態による、耳をスキャニングするための例示的なOCTコンフィギュレーション。
【図2】本発明の実施形態による、光ファイバ干渉計に結合される、低コヒーレントな光を使用する例示的なOCTシステム。
【図3】本発明の実施形態による、完全なOCTシステムの概略図。
【図4】本発明の実施形態による、コヒーレントな光によって惹起される干渉計信号と低コヒーレントな光との比較。
【図5】本発明の実施形態による、例示的で概略的なOCT撮像幾何学。
【図6】本発明の実施形態による、例示値と共に示されたOCTの特性を表す物理量の表。
【図7】本発明の実施形態による、OCTスキャンから取得される例示的なTIFFイメージ。
【図8】本発明の実施形態による、耳モデルのOCTスキャンから取得される再構成された3D点群。
【図9】本発明の実施形態による、3D CT耳スキャンの符号なし距離体積における特定の距離値の等価面。
【図10】本発明の実施形態による、例示的で非制限的な湾曲した較正ガイド。
【図11】本発明の実施形態による、例示的で非制限的な較正対象。
【図12】本発明の実施形態による、較正対象のセクション1からの反射光を観察することができる最後のフレームおよび円錐形状の表面からの反射光を観察することができる最初のフレーム。
【図13】本発明の実施形態による、構成対象の円錐形状部からの反射光を含む第2のフレーム。
【図14】本発明の実施形態による、3D点群として示されている、モデルデータセットの例示的な距離体積表現。
【図15】本発明の実施形態による、再構成されたデータセットとモデルデータセットとの間のポイント毎の誤差のヒストグラム。
【図16】本発明の実施形態による、較正スキャンにおいてレーザマークされたクロスの発生。
【図17】本発明の実施形態による、2つの較正データセットに関して例示的に計算されたマーカ位置のテーブル。
【図18】本発明の実施形態による、計算された例示的な開始パラメータの表。
【図19】本発明の実施形態による、耳の再構成プロセスのフローチャート。
【図20】本発明の実施形態による、耳道および耳介の再構成された結果。
【図21】本発明の実施形態による、耳介からの反射光が期待されたフレーム。
【図22】本発明の実施形態による、4つの異なる耳介スキャンからの再構成された結果。
【図23】本発明の実施形態による、耳再構成プロセスを実施するための例示的なコンピュータシステムのブロック図。
【技術分野】
【0001】
本発明は、耳道を再構成する方法および耳道を再構成するステップを実施するコンピュータにより実行可能なプログラム命令を具体的に実装しているコンピュータ読み出し可能記憶装置に関する。
【背景技術】
【0002】
現在アメリカ合衆国内の約2,100万人の人々、また学齢期の子供の1,000人に30人が聴覚障害に苦しんでいる。65歳になると3人に1人が難聴であり、また補聴器の恩恵を受けられるであろうそれらのうちの75%の人々は補聴器を使用していない。難聴の人々は支援を求める前に平均して7年も待機している。孤立化、引き籠りまた鬱病が聴覚障害に対する共通した反応である。さらに、聴覚障害の人は聴覚に障害のない人に比べて離婚率が高い。この状況は技術的な手段を用いることにより聴取りプロセスが可能な限り自然なものに近くなる必要があることを示唆している。人間の聴覚器官はたとえ極限状態の環境においても音響的なコミュニケーションが取れるように進化してきた。長年の研究により聴取りプロセスに関する多くの本質的な秘密が解明された。この知識により現代の補聴器の技術的な発展に関する基礎が提供される。補聴器、また全ての医療分野に関係する技術は進歩し続けている。
【0003】
種々の大きさの補聴器が存在する。補聴器を使用する人はそれぞれ適切な装着感および機能のために特注の補聴器シェルを必要とし、またいずれの補聴器も良好な装着感を保証するために耳の型を必要とする。目下のところ医師は耳道に小発泡ブロックを挿入することにより耳の物理的な型を取っている。耳道には続いてシリコン材料が充填される。数分後に材料が取り出され、その型が耳型モデリング工場または補聴器製造業者に送られ、そこにおいて3Dデータファイルを生成するためにスキャンされる。このような耳道または耳介の3D表現は、患者のために製造される特注の補聴器の外部シェルを製造するために使用することができる。しかしながら、現行の方法は技術的に非常に注意を有するものであり、したがって成型される型の不正確性は希なものではない。したがって、耳穴型(I−T−E)補聴器を装着する患者の耳の穴の幾何学を表すディジタルデータの精確な「点群」を補足する、特許によって保護されるスキャニング装置を提供することが所望される。さらには、型を補聴器製造業者に送る必要があるので、搬送コストおよび時間的な遅れは不可避である。また、型に含まれる情報を完成された補聴器に変換する工場での集中的な処理に起因する誤りまた労働賃金も生じる。医者の診察室にI−T−Eスキャニング装置を設置することによって、各耳道および耳介に関する幾何学的なデータの「点群」セットを迅速に収集することができ、また例えばインターネットを介してEメールで補聴器製造業者に送信することができる。
【0004】
光干渉断層法(OCT)は新しい高解像の度撮像技術であり、この技術により高解像度で組織の断面をリアルタイムに撮像することができる。OCTは商業的に利用可能なシステムにおいて10μmの高解像度で2〜3mmの深さの最小侵襲撮像を実施するための一種の「光学生検」として使用される。OCTはカテーテルプローブや撮像用針のような光ファイバ装置において使用することができる近赤外線光を使用する。この新たな撮像技術は癌の発見や診断を改善する可能性を有しており、また殊に瞳孔を介する検査に関する目の光学的な特性および網膜の接触性に基づき眼科学において有用である。OCTはまた人間の耳の3Dモデルに関して寸法を提供する可能性も有している。OCTスキャナを一連の断面画像を収集するために使用することができる。これらの2D画像を3D体積に合成し、耳の表面を抽出することができる。人間の耳道および耳介を表す3Dの点群ファイルは特注の補聴器を作成するために使用することができる。
【0005】
OCTは超音波撮像に類似するものであり、音響波の代りに赤外線光の輝度を測定する。超音波パルスの伝播および検出を時間遅延で表すことができるが、OCTは後方散乱光のエコー遅延時間を高解像度で測定するための低コヒーレンス干渉法として公知である干渉計相関技術を使用する。光の速度は非常に速いので、反射のエコー時間遅延を電子的に直接測定することは不可能である。
【0006】
上述したように、OCTは超音波の原理と顕微鏡の撮像性能および臨床医には周知である形状因子を組み合わせたものである。超音波が後方散乱音「エコー」から画像を形成するのに対し、OCTは生体の組織内の微小構造から反射される赤外線光波を使用する。OCTによって生成される断面画像は超音波撮像による画像と類似するが、OCTの画像解像度は1〜15μmであり、これは慣例の超音波よりも2オーダ程度まで高いものである。OCTの撮像深さは組織の光散乱特性および減衰特性によって制限されているにもかかわらず、最も非透過なサンプルにおいても2mmまたは3mmの画像浸透(image penetration)を達成することができる。眼を含む透過性の組織では、2cmを越えるプロービング深さが実証されている。超音波技術はOCTの能力を遙かに越える深さからの情報を提供することができるが、多くの用途においてはそのような解像度もあらゆる有用な情報をもたらすには十分ではないことに議論の余地はない。さらには超音波装置と検査されている組織は物理的に接触していなければならないが、OCTでは変換媒体は必要とされないので、空気を介して直接的に撮像を実施することができる。
【0007】
OCTの別の利点は、生検を実施する必要なく構造を診察できることである。切採生検および組織病理学のために臨床医は組織の試料を採取し、この試料が薄いスライスに切断され、顕微鏡のもとで検査される。慣例の生検方法に比べて、OCTは組織病理学の解像度に迫る解像度でもってin situでかつリアルタイムで組織を撮像することができる。多くの環境、例えば脳においては、切採生検方法は非常に危険である可能性があり、それどころか不可能である虞があるが、これをOCTスキャニングに代替させることができる。OCT技術は光ファイバ技術をカテーテル、内視鏡、腹腔鏡および外科用プローブと容易に調和させることができるので、非侵襲性かつ最小侵襲性の手法により身体の殆ど全ての側面において実施することができる。
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明の課題は、より正確に耳道を再構成する方法およびこの方法を実施するコンピュータにより実行可能なプログラム命令を具体的に実装しているコンピュータ読み出し可能記憶装置を提供することである。
【課題を解決するための手段】
【0009】
方法に関する課題は、方法が、3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで3Dデータセットの値は干渉強度を表し、OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号を抽出するステップを有し、1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号を受信するステップを有し、耳スキャンマーカフレーム番号および耳スキャンマーカフレームライン番号および基準マーカフレーム番号および基準フレームライン番号からOCT耳スキャンに関する開始位置および開始方向を求めるステップを有し、各スキャンラインに関して、最大干渉強度値のピクセル番号を発見し、スキャンガイドからのピクセルのオフセット距離を求めるステップを有し、距離オフセットデータから耳道の表面を再構成するステップを有することによって解決される。
【0010】
また方法に関する別の課題は、方法が、光干渉断層法(OCT)システム用のスキャニングガイドを提供するステップを有し、ここでガイドは1つまたは複数のマーカをガイドの外面上に有し、スキャニングデータを使用して取得された中空較正対象のOCTスキャンデータを提供するステップを有し、ここでスキャンデータは3Dデータを形成するピクセルのフレームおよびラインを包含し、3Dデータの値は干渉強度であり、較正対象スキャンデータからOCTスキャンガイド上の1つまたは複数のマーカに対応する、干渉強度の基準フレーム番号および基準ライン番号を抽出するステップを有し、スキャニングガイドを使用して取得された光干渉断層法(OCT)耳スキャンデータのセットを提供するステップを有し、ここでスキャンデータは干渉強度値の3Dデータセットを包含し、OCTスキャンガイド上の1つまたは複数のマーカに対応する干渉強度のフレーム番号およびライン番号をOCT耳スキャンデータから抽出するステップを有し、OCT耳スキャンに関する開始位置および開始方向を、1つまたは複数のマーカの耳スキャンフレーム番号および耳スキャンライン番号および1つまたは複数のマーカの基準フレーム番号および基準フレームライン番号から求めるステップを有することによって解決される。
【0011】
耳道を再構成するステップを実施するコンピュータにより実行可能なプログラム命令を具体的に実装している、コンピュータ読み出し可能記憶装置に関する課題は、前述のステップが、3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで3Dデータセットの値は干渉強度を表し、OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号を抽出するステップを有し、1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号を受信するステップを有し、耳スキャンマーカフレーム番号および耳スキャンマーカフレームライン番号および基準マーカフレーム番号および基準フレームライン番号からOCT耳スキャンに関する開始位置および開始方向を求めるステップを有し、各スキャンラインに関して、最大干渉強度値のピクセル番号を発見し、スキャンガイドからのピクセルのオフセット距離を求めるステップを有し、距離オフセットデータから耳道の表面を再構成するステップを有することによって解決される。
【発明を実施するための最良の形態】
【0012】
本明細書において記載されている本発明の実施例は一般的に、光干渉断層法(OCT)を使用することにより人間の耳の3Dモデルを形成する方法およびシステムを含む。OCTは物質および生物系の内部微小構造の高解像度での断面の断層撮像を後方散乱光または後方反射光の測定によって実施する。OCTスキャナは一連の断面画像を収集し、これらの2D画像を3D体積に合成し、耳の表面を抽出するために使用され、補聴器を適切に成形するために耳道および外耳の正確なモデルを提供する。再構成処理は2つの重要なスキャニングパラメータ、すなわちプローブヘッドの位置と、スキャン処理の間に光が放射および反射された方向の知識とを要求する。これらのスキャニングパラメータを確実に求めるための較正方法が発明されている。開発されたプロセスの評価は、正確なパラメータが計算され、耳道を満足のいく結果で再構成できることを示す。人間の耳道および耳介を表す3Dの点群ファイルを特注の補聴器の製作に使用することができる。
【0013】
本発明の1つの態様によれば耳道を再構成する方法が提供され、この方法においては、その値が干渉強度を表す3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットが提供され、OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号が抽出され、前述の1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号が受信され、耳スキャンマーカフレーム番号および耳スキャンマーカライン番号および前述の基準マーカフレーム番号およびライン番号から前述のOCT耳スキャンに関する開始位置および開始方向が求められ、各スキャンラインに関して、最大干渉強度値のピクセル番号が発見され、前述のスキャンガイドからの前述のピクセルのオフセット距離が求められ、前述の距離オフセットデータから前述の耳道の表面が再構成される。
【0014】
本発明の別の態様によれば、ガイドからのピクセルjのオフセット距離dが次式より計算される。
【数1】
ここでd0はガイドの中心からのオフセットであり、dsはサンプリングレートである。
【0015】
本発明の別の態様によれば、耳道の表面を次式より再構成することできる。
【数2】
ここで、p→(i,j)はガイドに垂直なスキャンラインiを表し、jはスキャンラインに沿ったピクセルを表し、p→0はスキャンの空間内の開始位置であり、c→(t)はガイドの湾曲した経路であり、tはスキャンラインiに対応するガイド上の位置であり、またαはスキャンライン角度であり、u→およびv→は曲線c→(t)に垂直な平面における2D座標フレームを規定している相互に垂直な2つの単位ベクトルである。
【0016】
本発明の別の態様によれば、
【数3】
であり、ここでvは前述のガイド内に挿入されているスキャニングプローブのスキャン速度であり、fはスキャンラインサンプリング周波数であり、また、
【数4】
であり、ここでωはプローブの角回転速度である。
【0017】
本発明の別の態様によれば、単位ベクトルu→およびv→は次式によって定義される。
【数5】
ここで、w→は如何なる時点においても曲線c→(t)に垂直でないベクトルであり、またt→は、
【数6】
として定義される曲線のタンジェントである。
【0018】
本発明の別の態様によれば、OCTスキャンデータは、回転可能なプローブが挿入されているガイドを含むOCTスキャン装置を提供し、前述のプローブを前述のガイドにスライドおよび回転させ、所定の間隔で前述のプローブから近赤外線光を放射し、基準信号を有する反射光の干渉を測定し、前述の干渉のデータをコンピュータ読み出し可能媒体に記憶することによって取得される。
【0019】
本発明の別の態様によれば、本方法においては各スキャンラインに対して所定の閾値を上回る干渉強度を有するピクセルが選択され、前述の選択されたピクセルの前述のスキャンガイドからのオフセット距離が求められる。
【0020】
本発明の別の態様によれば、本方法においては、スキャンラインに関する最大干渉強度値のピクセル番号の発見に先行して、スキャンラインの開始における強度値が破棄され、ここで開始値はスキャンガイド自体からの反射に対応する。
【0021】
本発明の別の態様によれば、基準マーカフレーム番号および基準ライン番号は較正対象のOCTスキャンデータから抽出された。
【0022】
本発明の別の態様によれば、較正対象のOCTスキャンデータからの前述の基準マーカフレーム番号および基準ライン番号の抽出において、0の角方向を表すためにマークされた較正対象の光干渉断層法(OCT)スキャンデータのセットが提供され、このスキャンデータは前述のガイドにおける1つまたは複数のマーカを有する較正ガイドを使用して取得された干渉強度の値を有する3Dデータセットを形成するピクセルのフレームおよびラインを包含し、前述の較正ガイド上の前述のマーカに対応する干渉強度のフレーム番号およびライン番号が抽出され、前述のフレーム番号および前述のライン番号から前述の較正ガイド上の前述のマーカの空間的な位置が求められる。
【0023】
本発明の別の態様によれば、ガイド上のマーカ位置は次式により計算される。
【数7】
ここでαは前述のガイドに関する回転角であり、αmarkerはマーカの角方向であり、tmarkerはマーカのフレーム番号であり、nSα=0は0の角方向でのスキャンラインのライン番号であり、nSstartは開始ライン番号であり、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFstartは開始フレーム番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である。
【0024】
本発明の別の態様によれば、開始位置tstartおよび開始方向αstartは次式によりマーカ位置tmarkerおよび方向αmarkerから計算される。
【数8】
ここで、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である。
【0025】
本発明の別の態様によれば、耳道を再構成するステップを実施するコンピュータによって実行されるプログラム命令を具体的に実施するコンピュータによって読み出し可能であるプログラム記憶装置が提供される。
【実施例】
【0026】
本明細書において説明する本発明の実施例は一般的に、OCTスキャニングデータおよび3D再構成アルゴリズムおよび評価プロシージャを用いて耳の表面を抽出するシステムおよび方法を含む。
【0027】
OCTは干渉相関技術を使用して後方散乱光および後方反射光の輝度およびエコー遅延時間を測定することによって撮像を実施する。発光ダイオード(LED)からの光が光ファイバに入力結合される。光は側路ビームに出力結合され、反射光および後方散乱光が再び光ファイバに入力結合される。光ファイバは面をスキャンするために回転し、また3D体積を測定するために移動されなければならない。回転する光ファイバを案内するスリーブが所定のスキャン経路に沿ってファイバを移動させるために使用される。ファイバから表面までの距離をスキャンデータから抽出できる場合、またスキャン経路の媒介変数曲線関数(parametric curve function)が既知である場合には、スキャンされた耳の表面の3D表現を計算することができる。
【0028】
図1は本発明の実施形態による、耳をスキャニングするための例示的なOCTコンフィギュレーションを示す。図面を参照すると、回転する光ファイバ12を収容しているガイド11が甲介14および耳道13に挿入されている。種々の補聴器を製造するために、耳道および耳介を含む耳全体がスキャンされるべきである。測定された形状は約0.1mmの精度であることが望ましい。OCTシステムの範囲は制限されているので、外耳はスキャン経路が耳の形状により近いものとなるようにファイバを案内する湾曲したスリーブを使用してスキャンされるべきである。
【0029】
湾曲したスリーブを使用した場合に生じる問題の1つは、3D再構成を実施するためにスキャンが開始される位置と光が最初に送出された方向とが既知でなければならないことである。直線状のガイドが使用される場合には、スキャンが直線状の経路のどこにおいて開始されるかは3D再構成に関して差異を生じさせないのでこれら2つのパラメータは重要ではない。しかしながら湾曲したガイドが使用される場合には、OCTスキャンデータからこれらのパラメータを抽出するための較正プロシージャよりこれらのパラメータは求められるべきである。OCTスキャンデータに現れるガイド上の特別なマーキングを有するガイドを較正することができ、この際マーキングデータは未知のパラメータに関する情報を提供する。
【0030】
物理的な基本
光ファイバマイケルソン干渉計と接続されている広帯域スーパールミネセンスダイオード(SLD)からの低コヒーレント光を使用する例示的なOCTシステムが図2に示されている。図面を参照すると、光源20が近赤外線ビーム25を放射し、この近赤外線ビーム25がファイバカプラ21によって分割され、一方のビームが基準アーム22に送出され、他方のビームがサンプルアーム23に送出される。基準ビームは既知の距離にあるミラーにより反射され、検出器24に戻される。サンプルビームは検査される組織内の種々の層により後方に反射される。低コヒーレンス光源を使用し、また組織から反射された光と基準ミラーから反射された光との干渉を測定することにより、サンプルの内部から光子が後方散乱された場所の情報を抽出することができる。
【0031】
光源のコヒーレンス長は非常に短いので、信号パス長と基準パス長が等しい場合にのみ干渉が生じる。これらのパス長が異なる場合には干渉は存在しない。基準アーム内のミラーを移動させることによって、したがって基準アームにおいて光をカバーする距離を変更することによって、組織内の種々のポイントから後方散乱光の干渉の強度が記録され、サンプルの縦方向のスキャンが実施される。干渉信号がバンドパスフィルタおよび包絡線検出を用いて復調され、続いて事前処理のためにコンピュータにおいてディジタル化されて記憶される。OCTシステムは−100dBまでの感度を有し、このことは10-10の放射光出力と同じくらい小さい反射信号を検出できることを意味している。2次元画像に関するデータを受信するために、一連の縦方向スキャンがスキャンの間に横方向に移動される光ビーム位置でもって実施される。この場合データセットは擬似カラー画像またはグレースケール画像として表される。
【0032】
全体のOCTシステムの概略図が図3に示されている。図面を参照すると、広帯域赤外線光源30が近赤外線ビームを放射し、この近赤外線ビームが光ファイバビームスプリッタ31によって分割され、一方のビームがスキャニング基準アーム32に送出され、他方のビームが組織サンプル33に送出される。基準ビームは既知の距離にあるミラー32によって反射され、検出器34に戻され、この検出器34において基準ビームが組織サンプル33内の種々の位置からの後方散乱光と干渉する。干渉信号が増幅器35によって増幅され、バンドパスフィルタ36によって復調され、コンピュータ37においてディジタル化されて記憶される。
【0033】
低コヒーレンス光源に基づき、信号は遅延の不一致とともに急速に減衰するので、空間的な特性を非常に精確に抽出することができる。図4は一方でコヒーレントな光によって惹起される干渉信号を比較し、他方で低コヒーレントな光をどのようにして高解像度の後方反射の位置を求めるために使用できるかを実証するために低コヒーレントな光が比較される。上部に示されている信号40は、マイケルソン干渉計セットアップにおけるミラーがさらに移動してまたさらに戻ってくる場合に、非常にコヒーレントな光源に関して画面上で観察される干渉を示す。グラフはミラーの変位の関数としての信号の干渉強度を示す。下部の信号41はコヒーレンス長42を示す低コヒーレンス光源を使用する場合に観察される干渉を示す。低コヒーレンスな干渉計と関連する干渉は、干渉計の2つのアームの光路長が正確に一致する場合にのみ観察することができるので、このセットアップを距離測定方法として適用することができる。
【0034】
OCTにおける深さ解像度は光源のコヒーレンス長によって規定される。ガウススペクトルを有する光源に関するコヒーレンス長LCは以下のように定義される。
【数9】
ここで、λは中心波長であり、Δλは半値全幅(FWHM)スペクトル帯域幅であり、nは屈折率である。
【数10】
として定義される画像深さ解像度Δzはコヒーレンス長に比例し、したがって光源の帯域幅に反比例する。
【0035】
深さ解像度は使用される光源の中心波長および帯域幅に依存して主としてμmのスケールである。非透過性の組織の光学的な撮像は組織の散乱および吸収に基づき難儀である。OCT撮像に関して関心となるスペクトル領域は約1.3μmの波長の近赤外線(NIR)であり、この波長領域においては可視光に関して光散乱が低く、また組織の吸収も同様に低く、達成されるべき3mmの深さまでの侵入が許容される。
【0036】
表面抽出
本発明の実施形態によれば、例示的な実験スキャンがLightLab Optical Coherence Tomography Imaging - System Model M2-Cardiologyを使用して取得された。このOCTシステムは1295nmの波長において動作し、この波長は患者インタフェースユニットにおいて測定される11mWの光輝度を生じさせるスーパールミネセンスLEDによって生成される。
【0037】
耳道および耳介の全体の体積をスキャンするために、SLDからの光が入力結合される光ファイバが回転しつつ、直線状のスリーブへと引き戻される。例示的で非制限的な速度は約0.5mm毎秒である。測定されたスキャンラインはスキャン経路に沿った3.125×10-4の解像度および1.4063°の角解像度を有する密ならせん体上に配置されている。そのようなOCT装置を用いてスキャンすることができるフィールドの深さ(DOF)は11.2mmであり、これによりライン毎に625のサンプルとともに0.0179mmの深さ解像度が得られる。図5は本発明の実施形態による、例示的で概略的なOCT撮像幾何学である。光ファイバは回転するので、フレーム毎にN個のスキャンラインがΔxの横解像度およびΔzの軸解像度で取得される。図6はOCTを特徴付ける他の物理量の表を例示値と共に示したものである。実験スキャンをマルチフレームTIFF画像として記憶することができ、各々の画像がサンプル毎に16ビットの2D画像を有する。OCTスキャンから取得された例示的なTIFF画像フレームが図7に示されている。各フレームはスキャニングプローブが1回転する内の全てのスキャンラインに関する反射光の輝度を示す。光ファイバからの反射およびこのファイバを案内するスリーブの内面ならびに外面からの反射を含む各スキャンラインにおける第1のサンプルが破棄されると、光を反射している耳の表面の位置を示し高い輝度を有する1つのスポットを各スキャンラインにおいて発見することができる。
【0038】
これらのスポットの位置を抽出して、これらのスポットから3D点群を生成することによって3D再構成を実施することができる。各スキャンラインの最大輝度を選択する前に、ノイズのあるデータセットがサイズ5で標準偏差σ=2の対称性のガウスローパスフィルタを使用することにより平滑化される。以下の記述においてはOCTスキャンデータが2次元の配列s(i,j)として表され、iはスキャンライン番号であり、jはスキャンライン上の特定の測定点である。選択的に複数のフレームへの分割を放棄することができ、したがって全てのフレームのスキャンラインを追加することができ、これらのスキャンラインにはただ1つの変数iがインデクスとして付与される。複数のフレームへの分割が保持されるべき場合には、フレーム番号を識別するために第3のインデクスkを使用することによりデータを3次元の配列で記憶することができる。記憶されているスキャンラインにおける各ピクセル位置jに関してファイバからの距離を次式により簡単に計算することができる。
【数11】
ここでd0はファイバの中心からのオフセットでありdsはサンプリング率である。サンプリング率に関する例示的な単位はピクセル毎mmである。本発明の実施形態によれば、所定の閾値(例示的で非制限的な値として4000)を上回る各輝度値に関して、ファイバからの距離がこの式により計算され、中間対象ファイルに記憶される。このデータファイルは再構成アルゴリズムに取り入れられ、3D表面点群の計算に使用される。
【0039】
3D再構成
ファイバはスキャンプロセス中に変形しないユークリッド座標フレームのx軸に平行な直線状のものであると仮定すると、測定された各値s(i,j)の空間内の位置を次式により計算することができる。
【数12】
ここで、p→0はスキャンが開始される空間内の位置であり、vはプローブ速度であり、fはラインサンプリング周波数であり、ωはプローブの角速度であり、tはグラスファイバ上の位置であり、αはスキャンライン角度であり、tおよびαはいずれも特定のスキャンラインインデクスiに関するものである。例示的なサンプリング周波数の単位はライン毎秒である。図8は再構成された3D点群を示し、これは光ファイバを案内する直線状のスリーブを使用することによってスキャンされた耳モデルのOCTスキャンから取得されたものである。
【0040】
しかしながら、OCTシステムの範囲は制限されているので、直線状のガイドによっては外耳を十分にスキャンすることができない。本発明の実施形態によれば、考えられる1つの解決手段は図1に示した例示的なガイドのようなファイバを案内する湾曲したスリーブの使用であり、これによりスキャン経路は耳の形状により近くなる。この場合、再構成方法の一般形態を湾曲した経路の関数と組み合わせることができる。これまで使用した直線状の経路の代りに、3D位置p→(i,j)はいずれの固定のiに関して光ファイバに垂直なラインを表す。iが変化する間はプローブ速度で光ファイバが引き戻されるスリーブの周囲にらせん状にこれらのラインが配置される。したがって本発明の実施形態によれば、再構成式を次式のように表すことができる。
【数13】
ここでc→(t)はスリーブの湾曲した経路を表す。ここで媒介変数曲線関数c→(t)によって表される任意の経路上において光ファイバを引き戻すことができる。例示的で非制限的な関数をラインセグメントまたは湾曲したセグメントから、また自由形状曲線として区分的に規定することができる。ベクトルu→およびv→は相互に垂直な2つの単位ベクトルであり、曲線に垂直な面における2D座標フレームを規定し、これによりスキャンラインを面内で回転させることができる。ここでu→およびv→は全体の曲線経路にわたり一致しているべきである。すなわちこれらのベクトルは曲線関数について回転しない。本発明の実施形態によれば、如何なる時点においても曲線c→(t)とは垂直でないベクトルw→を規定することができる。本発明の実施形態によれば、タンジェント
【数14】
を平面座標系を導出するために使用することができる:
【数15】
ここで「×」はベクトル積を表す。
【0041】
湾曲したスキャン経路に関しては、再構成のためにデータを3D空間に合成するやり方に影響を及ぼす2つのパラメータが存在する。これらの2つのパラメータはOCTスキャンが開始されるスキャン経路上の位置tおよびファイバの相応の回転角α∈[0,2π]である。これらのパラメータは取得されたOCTデータセットには包含されていない。別の問題は湾曲したスリーブの製造公差から生じる。実際のスキャン経路が想定したスキャン経路とは異なる場合には3D再構成は不正確になる。再構成に必要とされる情報は以下のものが含まれる。
(1)ガイドの分析方程式が既知であり、製造されたガイドが所定の形状と正確に合致する。
(2)ガイド内のスキャンヘッドの位置と光が放射および反射された方向とがスキャンプロセスを通じて既知である。
【0042】
内耳および外耳をポイント毎に0.1mmの精度で再構成することが目標である。
【0043】
誤差評価
本発明の実施形態において再構成されたデータセットの精度を評価するために、再構成された3D点群とモデル対象のデータセットの間の誤差を評価することが必要とされる。OCTスキャンを検査するために提供された幾つかの耳のモデルも3D CTスキャンを有するので、これをモデルデータセットとみなすことができる。再構成されたデータセットをモデルデータセットと比較するために、これらのデータセットの座標系を一致させる必要がある。したがって、2つのデータセット間の誤差が計算される前に3D剛体変換を実施する必要がある。
【0044】
2つの点群は共通の座標系を使用しても取得されないので、2つのデータセットを比較するために3Dへの剛体変換が確立されるべきである。剛体変換を表す種々のやり方が存在する。本発明の実施形態によれば、3D剛体変換は自由度6、すなわち3つの回転角θx,θy,θzおよび3つの並行移動値(translational values)tx,ty,tzを有し、したがって6つのパラメータベクトル[tx,ty,tz,θx,θy,θz]Tによって完全に表される。このパラメータ化はオイラー角表現として公知である。同時座標を使用することにより、剛体変換は線形マッピングとなる:
【数16】
変換行列Ttransを3×3の回転行列および3×1の並進ベクトルを含む4×4の行列によって表すことがきる:
【数17】
ここで、sx=sin(θx),cx=cos(θx),sy=sin(θy),cy=cos(θy),sz=sin(θz),cz=cos(θz)である。第4列は[0,0,0,1]で表されている。つまりこの第4列はこの剛体変換における遠近法的な部分ではない。
【0045】
行列乗算が交換可能でない、すなわちRxRyRzγRzRyRxであるのでオイラー角表現は固有のものではなく、またオイラー角がギンベルロック現象(Gimbel lock phenomenon)による影響を受けることを言及しておく:対象ポイントが最初に
【数18】
だけx軸について回転され、続いて
【数19】
だけy軸について回転され、角度θxおよび角度θzは同一の軸について回転し、したがってx軸およびz軸についてのそれぞれの回転をもはや識別することができない。しかしながら、オイラー角表現はそのようなクリティカルな角度を含む変換が使用されないので十分である。
【0046】
本発明の実施形態によれば、再構成データセットとモデルデータセットとの間の誤差を2つのデータセットにおける各ポイントの距離の合計を計算することによって測定することができる。空間内のあらゆるポイントからモデルデータセットまでの距離を照合するための高速な方法が望ましい。本発明の実施形態によれば、モデルデータセットから距離体積を構成することができる。この距離体積の構成は如何なる時でも制限を受けることなく良好に実施することができ、また非常に高い精度を有するモデルの表現をもたらす。
【0047】
本発明の実施形態によれば、モデルとの距離はkdツリーを使用することによって計算されるので、距離体積内の各ボクセルに関してモデルデータセット内の最も近いポイントが求められる。この方法は計算が困難な未組織のデータセットの三角測量表面表現を必要としない。しかしながら、距離が未サインであり、またサンプリングポイントまで常に幾つかの距離が存在するためにモデル表面においては距離値が0ではないことは欠点である。計算された未サインの3D CT耳スキャンの距離体積を特定の距離値から等価面を生成することによって視覚化することができ、これは図9に示されている。
【0048】
再構成されたデータセットとモデルデータセットとの間の誤差を、3次補間(trilinear interpolation)を使用して事前に計算された距離体積における距離を参照し、これらを加算し、再構成されたポイントの数で除算することによって計算することができる。
【0049】
較正
上述したように、OCTスキャンデータから耳道および耳介を再構成できるようにするために、スキャン経路の分析方程式がガイドの実際の形状と一致するようにガイドが可能な限り正確に製造されることが保証されなければならず、またスキャニングプロセスが開始されたパスの位置および光が最初に放出された方向が可能な限り正確に規定されなければならない。スキャニングプロセスの開始位置および開始方向を求めるために、ガイド上に特別なマーキングを有する較正ガイドが発明されており、これによりこのガイドを用いて各スキャンにおいて現れる開始位置および開始角度を識別することができる。例示的なマーキングがガイドの表面にレーザエッチングされ、表面に凹みが形成される。これらのエッチングされた凹みからの反射は、ガイドからの表面反射と容易に区別することができる。較正対象のマーキングがスキャンデータ内に生じるので、較正スキャンの開始位置および開始角度を容易に抽出することができる。較正スキャンの開始位置および角度を知ることによって、スキャンデータにおいても現れるガイド上のマーカ位置を計算することができる。既知のマーカ位置は各スキャニングプロセス中のプローブヘッドの開始位置および開始方向の抽出に役立つので、較正されたガイドを耳の表面のスキャニングに使用することができる。
【0050】
本発明の実施形態による例示的で非制限的な湾曲した較正ガイドは図10に示されており、そのガイド上に2種類のマーキングを有する。ポジションマーカ105はリングとして相互に所定の間隔をおいて設けられている。角度マーカ106はガイドの側方に配置されている。ガイドは可能な限り正確に製造されるべきである。製造プロセスにおける不正確性を回避するために、ガイドの中心線は1つの平面にのみ存在する。ガイドの第1の部分101は長さ22mmの直線状のものであり、この第1の部分に続く第2の部分102は半径15mmの四分円の形状のものであり、また続く第3の部分103は2mmの長さで再び直線状のものである。ガイドの全体の長さは合計47.55mmであり、ガイドの外壁は1.588mmの半径を有する。本発明の択一的な実施形態によれば、図10に示されているようにマーカを配置する代わりに、3つのクロスをランダムにガイド上にレーザマークすることができる。
【0051】
例示的なガイドはポリカーボネートから製造されている。何故ならば、ポリカーボネートは熱成形することができ、また正確にレーザマークすることができるからである。他の管材料におけるレーザマーキングでは必要とされる良好で鮮明なラインは生じないであろう。ガイドの内部においてスキャニングヘッドが引き戻されるスキャン経路に関する媒介変数曲線関数c→(t)を3つの部分で表すことができる。
【数20】
ここで、tは経路の開始から経路上の目下の地点までの距離(mm)であり、θは四分円の中心を点tと結ぶ線とx軸との間の角度である。スキャン経路のパラメータ化は再構成プロシージャに必要とされるので、このパラメータ化は上述の再構成アルゴリズムに組み込まれている。
【0052】
本発明の実施形態によれば較正対象も同様に発明されている。例示的で非制限的な較正対象が図11に示されており、またやはり2種類のマーキングを有している。円錐形状部112はスキャニングヘッドの位置を符号化し、また角度0を表す側面において1mmの深さを有する溝110が存在する。このことは、スキャン経路に垂直な平面を規定する単位ベクトルu→およびv→が計算され、α=0.0°の角度で光が送出された方向が求められる場合には考慮されるべきである。また較正対象上に2つの固定具111,114が設けられており、この固定具111,114を対象シェル内にガイドを再現するよう位置決めするために使用することができる。較正対象の2つの固定具は2mmの長さおよび1.588mmの半径を有し、構成ガイドと同じ幅を有する。z=0で始まる固定具111はセクション1と称され、また較正対象の端部における固定具114はセクション4と称される。円錐形状部112は20mmの長さを有し、またセクション2と称される。全長22mmにおいて最大半径5.588mmに達する。半径は一定であるが、較正対象はガイドと同様に四分円を形成する。部分113はセクション3と称される。例示的で非制限的な較正対象はアルミニウムからなる2つのシェル半部から製造された。
【0053】
本発明の実施形態による例示的で非制限的な較正方法はレーザマークされた較正ガイドを使用する少なくとも1回の構成スキャンを含む。上記において定義したような媒介変数曲線関数c→(t)によって表されるスキャン経路において光ファイバが引き戻された。較正対象を再構成するために、OCTスキャンが開始されるガイド上の位置およびファイバの対応する回転角を構成スキャンデータから抽出する必要がある。後続の計算のためにOCTスキャンデータのフレームへの分割が維持され、フレーム番号には変数nFがインデクスとして付され、また各フレームにおけるスキャンライン番号には変数nsがインデクスとして付される。スキャンライン番号は各フレームが256のスキャンラインを有するので1から256の値を取ることができる。フレーム番号はスキャンデータに依存する。
【0054】
構成スキャンに関する開始位置および開始角度を求めるためにスキャンを検査し、較正キャビティ内のスキャニングヘッドの所定の位置を表すフレーム番号およびスキャンライン番号を抽出する。較正対象に接しているガイドを用いることにより、較正ガイド内のプローブの位置も分かる。
【0055】
較正対象に関するスキャニングプロセスは較正ガイドの外で開始されたので、第1のステップはスキャンデータにおいてガイドが最初に現れる位置を特定する必要がある。しかしながらガイドは仕様に応じて要求されるものよりも長いので、スキャンデータ内のこの位置は媒介変数曲線関数c→(t)の開始位置t=0.0mmとは一致しない。したがってガイドが最初に現れるフレームを探す代わりに、較正対象の円錐形状部が始まるフレームを探すことができる。このフレームは溝が最初に現れるフレームなので非常に正確に選択することができる。
【0056】
図12(a)は較正対象のセクション1からの反射光を観察することができる最後のフレームを示し、また図12(b)は円錐形状部の表面からの反射光を観察することができる最初のフレームを示す。溝が図12(b)の左側に見て取れる。どのスキャンラインが円錐形状部からの最初の反射光を含むのかという指示は存在しないので、このセクションの開始を0.08mmの精度で求めることができ、この精度はスキャン経路に沿った3.125×10-4の解像度の256倍に相当する。したがって0角度を示す溝の中心線を、較正対象の円錐形状部から光が最初に後方散乱された線と想定することができる。図13は較正対象の円錐形状部からの反射光を含む第2のフレームを示す。図13に示されているように、ns=0からns=30まで30のスキャンラインにわたり溝が延びているので、ns=15を溝の中心線として選択することができる。
【0057】
式(2)に基づき3D再構成を行うために、長さ47.55mmの最初に設計された較正ガイドからの最初の反射が検出されるであろうフレーム番号およびスキャンライン番号が計算されるべきである。この場合このスキャンラインにおける反射は位置c→(t=0.0)において送出された光の反射に対応する。スキャン経路Δtの解像度を次式のように定義することができる。
【数21】
ここでvはプローブ速度であり、fはラインサンプリング密度であり、またスキャン経路に沿った距離tをカバーするために必要とされるスキャンラインの数Nsを以下のように定義することができる。
【数22】
【0058】
プローブ速度を0.5mm/sとすると、それぞれが256スキャンラインを有するフレームは2mmの直線部分をスキャンするために必要とされる。較正対象のセクション2の開始を表すフレーム番号およびスキャンライン番号から25フレーム減算することによって、計算を容易に実施することができる。溝の中心線は円錐形状部からの最初の反射を表すスキャンラインであると想定され、また正確に25のフレームが較正対象のセクション1をスキャンするために必要とされるので、スキャニングプロセスはt=0.0mmの開始位置およびα=0.0°の角度に対応するフレーム76およびスキャンライン15において始まる。
【0059】
ここで較正対象を上述したように再構成することができる。各スキャンラインにおける最大輝度「ブライトスポット」を探す前に、光ファイバからの反射およびファイバを案内するスリーブの外表面と内表面からの反射は除去されるべきである。しかしながら、ガイドの外面からの反射スポットは、較正対象の固定具からの反射を含むフレームにおいては除去されない。固定具はガイドと同じ半径を有するので、ガイドの外面からの反射光と較正対象からの反射光は一致する。ガイドからの反射光がこれらのフレームにおいて除去されたならば、較正対象に関する情報も失われる可能性がある。したがって、ガイドの外面からの反射は2つの固定具からの反射が現れるフレームにおいては除去されないが、他の全てのフレームにおいては除去される。
【0060】
「ブライトスポット」に対応する距離を式(1)から計算することができる。開始パラメータを計算することができ、位置c→(t=0.0)において送出された光の反射が現れるフレーム番号およびスキャンライン番号を抽出することができ、またガイド上のマーカ位置を以下説明するように計算することができる。αstart=0.0°およびt=0.0mmで再構成された較正対象が図14に示されている。
【0061】
再構成された較正対象の精度を評価するために、上述したように誤差評価と関連させて、モデルデータセットの距離体積表現が計算されるべきである。図14は3D点群として示された例示的なモデルデータセットの距離体積表現を示す。距離体積の計算をオフラインで実施することができる。ガイドはスキャニングプロセスの間較正対象上の固定具と接触していたので、この時シェル内のガイドの位置は極めて正確に識別されている。再構成されたデータセットと距離体積表現の2つの座標系を整合させることによって、2つのデータセット間の誤差を上述したように計算することができる。再構成された3D点群とモデルデータセットとの間の誤差はポイント毎に平均して0.2418mmとなる。再構成されたデータセットとモデルデータセットとの間のポイント毎の誤差のヒストグラムが図15に示されている。最も誤差の多いポイントは較正対象のセクション2とセクション3との間の境界付近の領域およびセクション3とセクション4との間の境界付近の領域において累積されている。またこれらのポイントは溝を検出することができないセクション3の内側部分において収集されているこの部分においては溝からの反射はスキャンデータを抽出するには低すぎる。溝は固定具に取り付けられることによって回転されたことが想定される。このことは、再構成に必要とされる媒介変数曲線関数c→(t)のこの部分は光ファイバがスキャニングプロセス中に追跡された実際のスキャン経路とは異なることを意味し、これは較正対象の不正確な再構成に繋がる。しかしながら、再構成された較正対象の達成された全体の精度は十分である。
【0062】
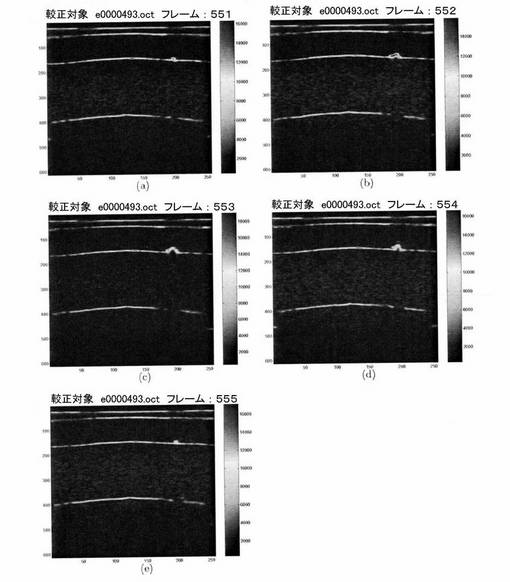
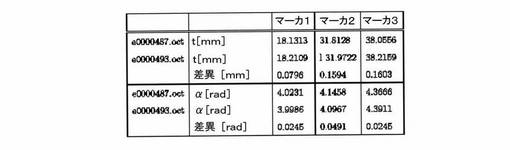
前述したように、3つのクロスがガイド上にレーザマークされている。ガイド上のマーカ位置を計算するために、マーカが現れるフレーム番号およびスキャンライン番号を較正スキャンデータから抽出することが必要とされる。図16(a)から(e)は較正スキャンにおけるレーザマークされたクロスの発生を示す。各マーカは種々のフレームに現れるが、図面に示されているように主に5つまたは6つのフレームに現れる。マーカを最も良好に識別することができる真ん中のフレーム、図16(c)および中心センターラインにはガイド上のマーカ位置の計算が行われる。ガイド上のマーカ位置は次式を使用して計算することができる。
【数23】
ここでnsはライン番号であり、nFはフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である。殊に、nSα=0は溝マーカと所定の関係にある開始値を規定し、nFstartおよびnSstartは第1のマーカからの既知の距離、または選択的に第1のマーカ自体である所定の開始値を表す。上述の式における単位(rad,mm)は例示的なものであり、他の系単位を制限なく使用できるということを言及しておく。2つの較正データセットに関して例示的に計算されたマーカ位置が表として図17に示されている。2つの較正データセットから抽出されたマーカ位置は約0.08mmから約0.16mmまた約0.0245radから0.049rad異なる。0.08mmから0.16mmの偏差は1,2フレームの不正確性に相当し、また0.0245radから0.049radの偏差は1,2スキャンラインの不正確性に相当する。このことはセクション2の開始もしくはマーカ位置、または両方に関するフレーム番号およびスキャンライン番号の抽出を前述の精度で実施できることを意味している。
【0063】
耳スキャンデータの再構成
較正段階の後には、較正されたガイドを耳のスキャニングに使用することができる。3D再構成を実施する前に、スキャンデータを検査し、レーザマークされた3つのクロスが現れるフレーム番号およびスキャンライン番号を可能な限り正確に求めることによって、各スキャニングプロセスに対してスキャニングヘッドの開始位置および開始角度を求める必要がある。
【0064】
各マーカ位置に対応する開始位置および開始角度をマーカ1に関しては以下の例示的な定義から容易に計算することができる。
【数24】
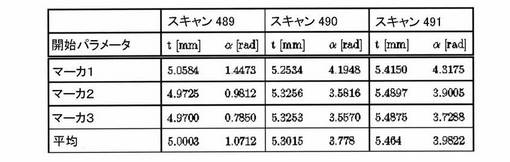
【0065】
スキャンが移動してマーカを通過すると、較正に基づきガイドがパラメータ化されたガイドの位置において全ての撮像データを正確に空間内に位置決めおよびアライメントするためのマーカ情報を取得することができる。最適な場合には、開始位置および開始角度が3つの計算それぞれに対して同一であることが望ましい。しかしながら、マーカ位置のフレーム番号およびスキャンライン番号を正確に求めることはできないので、3つの計算から同一の結果が得られることはない。3つのスキャンから例示的に計算された開始パラメータが図18の表に示されている。表に示されているように開始位置に関する値は約0.5mmほど変化し、また開始角度は約35°の間隔で異なる。これらの偏差は、ガイドマーカが正確な位置を求めることができないクロスであるという事実を明らかにすることができる。マーカは6つまたは7つのスキャンにおいて現れるので、0.5mmの偏差は約4回転に相当し、したがって4つのフレームは不意のものではないので、またマーカは約40°の範囲に相当する約30のスキャンラインにわたり延びるので、35°の角度偏差も包含しうる。前述の変形に基づき、前述の3つの値を平均化することによって最終的な値を計算することができる:
【数25】
上述の式はスキャンがガイドの直線状の部分において開始される場合に使用される。スキャニングプロセスがガイドの他方の端部において開始されている場合には式を変形する必要があるが、これは容易な変換である。
【0066】
本発明の実施形態による耳の再構成プロセスのフローチャートが図19に示されている。最初に、耳をスキャニングするために使用されるガイドが較正される。ステップ191においては較正対象がOCTスキャナを用いてスキャンされ、較正スキャンデータセットが提供される。OCTスキャンデータのフレームおよびスキャンラインは3Dデータセットを形成し、その値は干渉強度である。ステップ192においては、ガイド上のマーカが現れるこれらのフレームおよびスキャンラインが抽出され、ステップ193においてはこの抽出によりガイド上のマーカ位置を式(3)および(4)より計算することができる。マーカが耳のスキャンデータ内に現れるので、この情報を、較正されたガイドを使用して記録されたあらゆる耳スキャンに関して開始位置および開始角度を計算するために使用することができる。較正マーカ位置を将来の使用のためにファイルに記憶することができる。較正対象を再構成するために、溝を含む較正対象のセクション2が始まるフレームおよびスキャンラインから開始パラメータを求めることができる。
【0067】
ステップ194においては耳がOCTスキャナを用いてスキャンされ、耳のスキャンデータのセットが提供される。このデータは3Dデータセットも形成し、また上述したようにこのデータをローパスフィルタを用いて平滑化することができる。ステップ195においては、ガイド上にマーカが現れるフレームおよびスキャンラインが抽出される。ステップ196においては、耳スキャンマーカ位置を較正スキャンマーカ位置と比較することにより、開始パラメータを式(5),(6)および(7)により計算することができる。ステップ197においては、各ラインおよび各フレームについてのサンプルデータが抽出され、最大輝度を有するサンプルのピクセル番号が発見される。最大輝度ピクセルの距離オフセットが式(1)により求められる。ガイドからの反射に対応する、各スキャンラインにおける開始サンプルをこのステップのために破棄できることを言及しておく。続いてステップ198において、ステップ196において得られた開始位置および開始方向を使用して、式(2)により距離オフセットデータから耳表面が再構成される。
【0068】
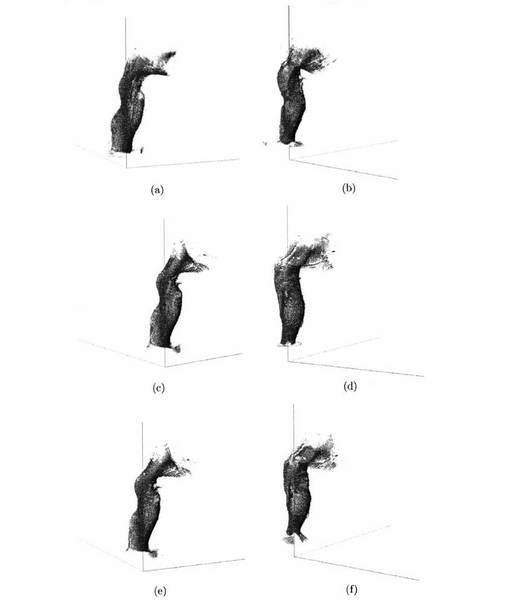
耳スキャンデータの評価
本発明の実施形態による耳の再構成方法の実験はシリコンから製造されたモデル耳を使用して実施された。図20(a)〜(f)は耳道および耳介に関する再構成された結果を示す。図面から見て取れるように、耳道を極めて良好に再構成することができる。図20(a)および図20(b)は2つの異なる視点からの同一の再構成された3D点群を示す。図20(c)、図20(d)、図20(e)および図20(f)は第2および第3のスキャニングプロセスからの再構成された3D点群をそれぞれ2つの異なる視点から示したものである。3つ全ての表現は殆ど同一に見える。耳道の表面表現には殆ど開口部が存在しない。
【0069】
図21(a)〜(f)は耳介からの反射光が期待されたフレームを示す。外耳の表面は光ファイバからだいぶ離れており、また耳介から反射された光の測定された輝度は検出するにはあまりに低いので、耳介を再構成することはより困難である。これらのフレームを検査する場合には、図面から見てとれるように4000よりも高い僅かな輝度値のみを識別することができる。
【0070】
本発明の実施形態によれば、各スキャンに関してガイドの位置を変更して耳介の異なる部分をスキャンする、耳介部分の複数回のOCTスキャンを使用することができる。再構成された3D点群を耳介全体の3D表現を取得するために統合することができる。4つの異なる耳介からの再構成結果が図22(a)〜(c)に示されている。各グループの左側に示されている3D点群は同一のものであるが、右側に示されている3D点群は異なるスキャンデータから再構成されたものである。再構成された結果は耳介の同一の部分は殆どスキャンされており、その結果3Dデータセットの統合により耳介の形状に関するさらなる情報は提供されないことを示唆している。さらにはガイドの外面からの反射光がしばしば抽出されたことが示されている。これは各スキャンラインにおける最初のサンプルはガイド端部の外面から光を反射するところにおいては破棄されるべきではないためである。
【0071】
耳介をスキャンし、検出するには十分な強さである反射光の干渉信号を取得する別のやり方は、耳の形状にフィットする湾曲したガイドを設計することである。例示的なガイドは、スキャン経路が直線状のものよりも耳の形状により近くなるように、1つの線状セグメントおよび2つの環状セグメントを有する。別のアプローチは比較的長いDOFを有するOCT装置の使用である。
【0072】
ファイバからの反射ならびにガイドの内面および外面からの反射は各スキャンラインにおける最大輝度値を探す前に破棄される。しかしながらガイド表面からの反射は各スキャンラインに関する同一のサンプルにおいては現れないが、約10のサンプルにわたり変化する。さらにはガイドがしばしばスキャニングプロセス中に耳の表面と接触し、ガイドの外面からの反射が耳の表面からの反射と一致することが生じる。したがって、2つの反射が高輝度を有する1つのスポットとして現れる可能性がある。各スキャンラインにおいて不十分な数のサンプルが破棄される場合には、耳の表面からの反射光を表す輝度値を検出することはできないであろう。何故ならば、そのような輝度値はガイド表面からの反射を示す値よりも小さいからである。他方で過剰に多くのサンプルが破棄される場合にはガイドからの反射のみならず、対象からの反射も除去されるので、反射をもはや抽出することができない。しかしながら、ファイバからの反射およびガイドからの反射を破棄するために各スキャンラインにおける最初のサンプルを除外することは本発明の実施形態にとって十分であった。
【0073】
本明細書において説明した有利な実施形態および一般的な原理ならびに特徴についての種々の変更は当業者であれば容易に可能であると解される。したがって本発明は上述の実施形態に制限することを意図しておらず、本明細書において説明した原理および特徴と矛盾しない広範な範囲のものと認められる。
【0074】
さらには本発明を、ハードウェア、ソフトウェア、ファームウェア、特殊用途プロセッサまたはそれらの組み合わせの種々の形態で実施できると解される。1つの実施形態においては、本発明をコンピュータ読み出し可能プログラム記憶装置において具体的に実施されるアプリケーションプログラムとしてのソフトウェアで実施することができる。アプリケーションプログラムをあらゆる適切なアーキテクチャを有するマシンによってアップロードし、また実行することができる。
【0075】
相応に図23は本発明の実施形態による、耳再構成プロセスを実施するための例示的なコンピュータシステムのブロック図である。ここで図23を参照すると、本発明を実施するコンピュータシステム231は殊に中央処理装置(CPU)232、メモリ233および入力/出力(I/O)インタフェース234を包含することができる。コンピュータシステム231は全般的にI/Oインタフェース234を介して表示装置235および種々の入力装置236、例えばマウスやキーボードと接続されている。支援回路はキャッシュ、電源、クロック回路および通信バスのような回路を包含することができる。メモリ233はランダムアクセスメモリ(RAM)、リードオンリメモリ(ROM)、ディスク駆動装置、テープ駆動装置などやそれらの組み合わせを包含することができる。本発明をメモリ233に記憶されているルーチン237として実現し、信号ソース238からの信号を処理するCPU232によって実行することができる。コンピュータシステム231自体は汎用コンピュータシステムであるが、本発明のルーチン237を実行しているときには特定用途向けコンピュータシステムになる。
【0076】
コンピュータシステム231はオペレーティングシステムおよびマイクロ命令コードも有する。本明細書において説明した種々のプロセスおよびファンクションはオペレーティングシステムを介して実行されるマイクロ命令コードの一部またはアプリケーションプログラムの一部(またはそれらの組み合わせ)でよい。さらには他の種々の周辺装置、例えば付加的なデータ記憶装置および印刷装置をコンピュータプラットフォームと接続することができる。
【0077】
さらには、図面に示されている幾つかの構成システム要素および方法のステップをソフトウェアで実現することができるので、システム要素(または処理ステップ)間の実際の関係を本発明がプログラミングされているやり方に依存して変更できると解される。本明細書に開示されている本発明の教示により、当業者であれば本発明の実施形態またはコンフィギュレーションまたそれらに類似するものを推考できるであろう。
【0078】
本発明を有利な実施例を参照しながら詳細に説明したが、当業者であれば本発明の精神および範囲から逸脱することなく、請求項によって定義されている限りにおいて本発明の種々の変更および置換を実施できることが分かるであろう。
【0079】
付記
本明細書において、p→(i,j)は
を表し、p→0は
を表し、c→(t)は
を表し、u→は
を表し、v→は
を表し、w→は
を表し、t→は
を表し、nSα=0は
を表し、nSstartは
を表し、nSmarkerは
を表し、nFstartは
を表し、nFmarkerは
を表し、c→(t=0.0)は
を表す。
【図面の簡単な説明】
【0080】
【図1】本発明の実施形態による、耳をスキャニングするための例示的なOCTコンフィギュレーション。
【図2】本発明の実施形態による、光ファイバ干渉計に結合される、低コヒーレントな光を使用する例示的なOCTシステム。
【図3】本発明の実施形態による、完全なOCTシステムの概略図。
【図4】本発明の実施形態による、コヒーレントな光によって惹起される干渉計信号と低コヒーレントな光との比較。
【図5】本発明の実施形態による、例示的で概略的なOCT撮像幾何学。
【図6】本発明の実施形態による、例示値と共に示されたOCTの特性を表す物理量の表。
【図7】本発明の実施形態による、OCTスキャンから取得される例示的なTIFFイメージ。
【図8】本発明の実施形態による、耳モデルのOCTスキャンから取得される再構成された3D点群。
【図9】本発明の実施形態による、3D CT耳スキャンの符号なし距離体積における特定の距離値の等価面。
【図10】本発明の実施形態による、例示的で非制限的な湾曲した較正ガイド。
【図11】本発明の実施形態による、例示的で非制限的な較正対象。
【図12】本発明の実施形態による、較正対象のセクション1からの反射光を観察することができる最後のフレームおよび円錐形状の表面からの反射光を観察することができる最初のフレーム。
【図13】本発明の実施形態による、構成対象の円錐形状部からの反射光を含む第2のフレーム。
【図14】本発明の実施形態による、3D点群として示されている、モデルデータセットの例示的な距離体積表現。
【図15】本発明の実施形態による、再構成されたデータセットとモデルデータセットとの間のポイント毎の誤差のヒストグラム。
【図16】本発明の実施形態による、較正スキャンにおいてレーザマークされたクロスの発生。
【図17】本発明の実施形態による、2つの較正データセットに関して例示的に計算されたマーカ位置のテーブル。
【図18】本発明の実施形態による、計算された例示的な開始パラメータの表。
【図19】本発明の実施形態による、耳の再構成プロセスのフローチャート。
【図20】本発明の実施形態による、耳道および耳介の再構成された結果。
【図21】本発明の実施形態による、耳介からの反射光が期待されたフレーム。
【図22】本発明の実施形態による、4つの異なる耳介スキャンからの再構成された結果。
【図23】本発明の実施形態による、耳再構成プロセスを実施するための例示的なコンピュータシステムのブロック図。
【特許請求の範囲】
【請求項1】
耳道を再構成する方法において
3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで前記3Dデータセットの値は干渉強度を表し、
OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号を抽出するステップを有し、
前記1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号を受信するステップを有し、
耳スキャンマーカフレーム番号および耳スキャンマーカフレームライン番号および基準マーカフレーム番号および基準フレームライン番号から前記OCT耳スキャンに関する開始位置および開始方向を求めるステップを有し、
各スキャンラインに関して、最大干渉強度値のピクセル番号を発見し、前記スキャンガイドからの前記ピクセルのオフセット距離を求めるステップを有し、
前記距離オフセットデータから前記耳道の表面を再構成するステップを有することを特徴とする、耳道を再構成する方法。
【請求項2】
前記ガイドからのピクセルjのオフセット距離dを次式より計算し、
【数1】
ここで、d0はガイドの中心からのオフセットであり、dsはサンプリングレートである、請求項1記載の方法。
【請求項3】
前記耳道の表面を次式より再構成し、
【数2】
ここで、p→(i,j)はガイドに垂直なスキャンラインiを表し、jはスキャンラインに沿ったピクセルを表し、p→0はスキャンの空間内の開始位置であり、c→(t)はガイドの湾曲した経路であり、tはスキャンラインiに対応するガイド上の位置であり、またαはスキャンライン角度であり、u→およびv→は曲線c→(t)に垂直な平面における2D座標フレームを規定している相互に垂直な2つの単位ベクトルである、請求項1記載の方法。
【請求項4】
【数3】
ここで、vは前記ガイド内に挿入されているスキャニングプローブのスキャン速度であり、fはスキャンラインサンプリング周波数であり、また、
【数4】
ここで、ωはプローブの角回転速度である、請求項3記載の方法。
【請求項5】
前記単位ベクトルu→およびv→を次式により定義し、
【数5】
ここで、w→は如何なる時点においても曲線c→(t)に垂直でないベクトルであり、t→は、
【数6】
として定義される曲線のタンジェントである、請求項3記載の方法。
【請求項6】
前記OCTスキャンデータを、回転可能なプローブが挿入されているガイドを含むOCTスキャン装置を提供し、前記プローブを前記ガイドにおいてスライドおよび回転させ、所定の間隔で前記プローブから近赤外線光を放射し、基準信号を有する反射光の干渉を測定し、前記干渉のデータをコンピュータ読み出し可能媒体に記憶することによって取得する、請求項1記載の方法。
【請求項7】
各スキャンラインに対して、所定の閾値を上回る干渉強度を有するピクセルを選択し、選択された前記ピクセルの前記スキャンガイドからのオフセット距離を求める、請求項1記載の方法。
【請求項8】
スキャンラインに関する最大干渉強度値のピクセル番号の発見に先行して、スキャンラインの開始における強度値を破棄し、ここで前記値は前記スキャンガイド自体からの反射に対応する、請求項1記載の方法。
【請求項9】
前記基準マーカフレーム番号および基準ライン番号を較正対象のOCTスキャンデータから抽出する、請求項1記載の方法。
【請求項10】
較正対象のOCTスキャンデータからの前記基準マーカフレーム番号および基準ライン番号の抽出は、
0の角方向を表すためにマークされた較正対象の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで、前記スキャンデータは3Dデータセットを形成するピクセルのフレームおよびラインを包含し、前記3Dデータセットの値は前記ガイドにおける1つまたは複数のマーカを有する較正ガイドを使用して取得された干渉強度の値であり、
前記較正ガイド上の前記マーカに対応する干渉強度のフレーム番号およびライン番号を抽出するステップを有し、
前記フレーム番号および前記ライン番号から前記較正ガイド上の前記マーカの空間的な位置を求めるステップを有する、請求項9記載の方法。
【請求項11】
前記ガイド上の前記マーカ位置を次式により計算し、
【数7】
ここで、αは前記ガイドに関する回転角であり、αmarkerはマーカの角方向であり、tmarkerはマーカのフレーム番号であり、nSα=0は0の角方向でのスキャンラインのライン番号であり、nSstartは開始ライン番号であり、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFstartは開始フレーム番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である、請求項10記載の方法。
【請求項12】
前記開始位置tstartおよび前記開始方向αstartを次式によりマーカ位置tmarkerおよび方向αmarkerから計算し、
【数8】
ここで、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である、請求項1の方法。
【請求項13】
耳道を再構成する方法において、
光干渉断層法(OCT)システム用のスキャニングガイドを提供するステップを有し、ここで該ガイドは1つまたは複数のマーカを該ガイドの外面上に有し、
前記スキャニングデータを使用して取得された中空較正対象のOCTスキャンデータを提供するステップを有し、ここで該スキャンデータは3Dデータを形成するピクセルのフレームおよびラインを包含し、該3Dデータの値は干渉強度であり、
前記較正対象スキャンデータから前記OCTスキャンガイド上の前記1つまたは複数のマーカに対応する、干渉強度の基準フレーム番号および基準ライン番号を抽出するステップを有し、
前記スキャニングガイドを使用して取得された光干渉断層法(OCT)耳スキャンデータのセットを提供するステップを有し、ここで該スキャンデータは干渉強度値の3Dデータセットを包含し、
前記OCTスキャンガイド上の前記1つまたは複数のマーカに対応する干渉強度のフレーム番号およびライン番号を前記OCT耳スキャンデータから抽出するステップを有し、
前記OCT耳スキャンに関する開始位置および開始方向を、前記1つまたは複数のマーカの耳スキャンフレーム番号および耳スキャンライン番号および前記1つまたは複数のマーカの基準フレーム番号および基準フレームライン番号から求めるステップを有することを特徴とする、耳道を再構成する方法。
【請求項14】
さらに、各スキャンラインに関して、最大干渉強度値のピクセル番号を発見するステップを有し、前記スキャンガイドから前記ピクセルのオフセット距離を求めるステップを有し、前記距離オフセットデータから前記耳道の表面を再構成するステップを有する、請求項13記載の方法。
【請求項15】
前記スキャニングガイドは少なくとも2つの直線状の部分と1つの湾曲した部分とを有し、前記スキャニングガイドは回転するスキャニングプローブを収容することに適している、請求項13記載の方法。
【請求項16】
前記較正対象は、第1の端部において第1の固定具を有し、第2の端部において第2の固定具を有し、前記固定具は前記直線状の部分において前記較正ガイドを確実に保持することに適しており、外面の一部に沿って設けられている0の角方向を表す溝を有し、該溝は前記固定具の外面全体にわたっては延長していない、請求項15記載の方法。
【請求項17】
前記較正対象からの抽出は、さらに、
前記第1の固定具から干渉強度が現れる最後のフレームおよび前記溝から干渉強度が現れる最初のフレームを発見するステップを有し、
0の開始角方向を規定するために、前記溝が現れる前記最初のフレームから前記溝の中心線を選択するステップを有し、
前記溝が現れる前記最初のフレームの前記フレーム番号を、前記スキャニングガイドの前記直線状の部分の内の1つの長さおよび前記プローブの速度から求めるステップを有し、ここで前記フレーム番号は開始位置を規定し、
各スキャンラインに関して、最大干渉強度値のピクセル番号を発見するステップを有し、前記スキャンガイドから前記ピクセルのオフセット距離を求めるステップを有し、
前記距離オフセットデータから前記較正対象の表面を再構成するステップを有する、請求項16記載の方法。
【請求項18】
耳道を再構成するステップを実施するコンピュータにより実行可能なプログラム命令を具体的に実装している、コンピュータ読み出し可能記憶装置において
前記ステップは、
3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで前記3Dデータセットの値は干渉強度を表し、
OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号を抽出するステップを有し、
前記1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号を受信するステップを有し、
耳スキャンマーカフレーム番号および耳スキャンマーカフレームライン番号および基準マーカフレーム番号および基準フレームライン番号から前記OCT耳スキャンに関する開始位置および開始方向を求めるステップを有し、
各スキャンラインに関して、最大干渉強度値のピクセル番号を発見し、前記スキャンガイドからの前記ピクセルのオフセット距離を求めるステップを有し、
前記距離オフセットデータから前記耳道の表面を再構成するステップを有することを特徴とする、コンピュータ読み出し可能記憶装置。
【請求項19】
前記ガイドからのピクセルjのオフセット距離dを次式より計算し、
【数9】
ここで、d0はガイドの中心からのオフセットであり、dsはサンプリングレートである、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項20】
前記耳道の表面を次式より再構成し、
【数10】
ここで、p→(i,j)はガイドに垂直なスキャンラインiを表し、jはスキャンラインに沿ったピクセルを表し、p→0はスキャンの空間内の開始位置であり、c→(t)はガイドの湾曲した経路であり、tはスキャンラインiに対応するガイド上の位置であり、またαはスキャンライン角度であり、u→およびv→は曲線c→(t)に垂直な平面における2D座標フレームを規定している相互に垂直な2つの単位ベクトルである、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項21】
【数11】
ここで、vは前記ガイド内に挿入されているスキャニングプローブのスキャン速度であり、fはスキャンラインサンプリング周波数であり、また、
【数12】
ここで、ωはプローブの角回転速度である、請求項20記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項22】
前記単位ベクトルu→およびv→を次式により定義し、
【数13】
ここで、w→は如何なる時点においても曲線c→(t)に垂直でないベクトルであり、t→は、
【数14】
として定義される曲線のタンジェントである、請求項20記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項23】
前記OCTスキャンデータを、回転可能なプローブが挿入されているガイドを含むOCTスキャン装置を提供し、前記プローブを前記ガイドにおいてスライドおよび回転させ、所定の間隔で前記プローブから近赤外線光を放射し、基準信号を有する反射光の干渉を測定し、前記干渉のデータをコンピュータ読み出し可能媒体に記憶することによって取得する、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項24】
前記方法は、各スキャンラインに対して、所定の閾値を上回る干渉強度を有するピクセルを選択するステップと、選択された前記ピクセルの前記スキャンガイドからのオフセット距離を求めるステップとを有する、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項25】
前記方法は、スキャンラインに関する最大干渉強度値のピクセル番号の発見に先行して、スキャンラインの開始における強度値を破棄するステップを有し、ここで前記値は前記スキャンガイド自体からの反射に対応する、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項26】
前記基準マーカフレーム番号および基準ライン番号を較正対象のOCTスキャンデータから抽出する、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項27】
較正対象のOCTスキャンデータからの前記基準マーカフレーム番号および基準ライン番号の抽出は、
0の角方向を表すためにマークされた較正対象の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで、前記スキャンデータは3Dデータセットを形成するピクセルのフレームおよびラインを包含し、前記3Dデータセットの値は前記ガイドにおける1つまたは複数のマーカを有する較正ガイドを使用して取得された干渉強度の値であり、
前記較正ガイド上の前記マーカに対応する干渉強度のフレーム番号およびライン番号を抽出するステップを有し、
前記フレーム番号および前記ライン番号から前記較正ガイド上の前記マーカの空間的な位置を求めるステップを有する、請求項26記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項28】
前記ガイド上の前記マーカ位置を次式により計算し、
【数15】
ここで、αは前記ガイドに関する回転角であり、αmarkerはマーカの角方向であり、tmarkerはマーカのフレーム番号であり、nSα=0は0の角方向でのスキャンラインのライン番号であり、nSstartは開始ライン番号であり、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFstartは開始フレーム番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である、請求項27記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項29】
前記開始位置tstartおよび前記開始方向αstartを次式によりマーカ位置tmarkerおよび方向αmarkerから計算し、
【数16】
ここで、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である、請求項18のコンピュータ読み出し可能プログラム記憶装置。
【請求項1】
耳道を再構成する方法において
3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで前記3Dデータセットの値は干渉強度を表し、
OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号を抽出するステップを有し、
前記1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号を受信するステップを有し、
耳スキャンマーカフレーム番号および耳スキャンマーカフレームライン番号および基準マーカフレーム番号および基準フレームライン番号から前記OCT耳スキャンに関する開始位置および開始方向を求めるステップを有し、
各スキャンラインに関して、最大干渉強度値のピクセル番号を発見し、前記スキャンガイドからの前記ピクセルのオフセット距離を求めるステップを有し、
前記距離オフセットデータから前記耳道の表面を再構成するステップを有することを特徴とする、耳道を再構成する方法。
【請求項2】
前記ガイドからのピクセルjのオフセット距離dを次式より計算し、
【数1】
ここで、d0はガイドの中心からのオフセットであり、dsはサンプリングレートである、請求項1記載の方法。
【請求項3】
前記耳道の表面を次式より再構成し、
【数2】
ここで、p→(i,j)はガイドに垂直なスキャンラインiを表し、jはスキャンラインに沿ったピクセルを表し、p→0はスキャンの空間内の開始位置であり、c→(t)はガイドの湾曲した経路であり、tはスキャンラインiに対応するガイド上の位置であり、またαはスキャンライン角度であり、u→およびv→は曲線c→(t)に垂直な平面における2D座標フレームを規定している相互に垂直な2つの単位ベクトルである、請求項1記載の方法。
【請求項4】
【数3】
ここで、vは前記ガイド内に挿入されているスキャニングプローブのスキャン速度であり、fはスキャンラインサンプリング周波数であり、また、
【数4】
ここで、ωはプローブの角回転速度である、請求項3記載の方法。
【請求項5】
前記単位ベクトルu→およびv→を次式により定義し、
【数5】
ここで、w→は如何なる時点においても曲線c→(t)に垂直でないベクトルであり、t→は、
【数6】
として定義される曲線のタンジェントである、請求項3記載の方法。
【請求項6】
前記OCTスキャンデータを、回転可能なプローブが挿入されているガイドを含むOCTスキャン装置を提供し、前記プローブを前記ガイドにおいてスライドおよび回転させ、所定の間隔で前記プローブから近赤外線光を放射し、基準信号を有する反射光の干渉を測定し、前記干渉のデータをコンピュータ読み出し可能媒体に記憶することによって取得する、請求項1記載の方法。
【請求項7】
各スキャンラインに対して、所定の閾値を上回る干渉強度を有するピクセルを選択し、選択された前記ピクセルの前記スキャンガイドからのオフセット距離を求める、請求項1記載の方法。
【請求項8】
スキャンラインに関する最大干渉強度値のピクセル番号の発見に先行して、スキャンラインの開始における強度値を破棄し、ここで前記値は前記スキャンガイド自体からの反射に対応する、請求項1記載の方法。
【請求項9】
前記基準マーカフレーム番号および基準ライン番号を較正対象のOCTスキャンデータから抽出する、請求項1記載の方法。
【請求項10】
較正対象のOCTスキャンデータからの前記基準マーカフレーム番号および基準ライン番号の抽出は、
0の角方向を表すためにマークされた較正対象の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで、前記スキャンデータは3Dデータセットを形成するピクセルのフレームおよびラインを包含し、前記3Dデータセットの値は前記ガイドにおける1つまたは複数のマーカを有する較正ガイドを使用して取得された干渉強度の値であり、
前記較正ガイド上の前記マーカに対応する干渉強度のフレーム番号およびライン番号を抽出するステップを有し、
前記フレーム番号および前記ライン番号から前記較正ガイド上の前記マーカの空間的な位置を求めるステップを有する、請求項9記載の方法。
【請求項11】
前記ガイド上の前記マーカ位置を次式により計算し、
【数7】
ここで、αは前記ガイドに関する回転角であり、αmarkerはマーカの角方向であり、tmarkerはマーカのフレーム番号であり、nSα=0は0の角方向でのスキャンラインのライン番号であり、nSstartは開始ライン番号であり、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFstartは開始フレーム番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である、請求項10記載の方法。
【請求項12】
前記開始位置tstartおよび前記開始方向αstartを次式によりマーカ位置tmarkerおよび方向αmarkerから計算し、
【数8】
ここで、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である、請求項1の方法。
【請求項13】
耳道を再構成する方法において、
光干渉断層法(OCT)システム用のスキャニングガイドを提供するステップを有し、ここで該ガイドは1つまたは複数のマーカを該ガイドの外面上に有し、
前記スキャニングデータを使用して取得された中空較正対象のOCTスキャンデータを提供するステップを有し、ここで該スキャンデータは3Dデータを形成するピクセルのフレームおよびラインを包含し、該3Dデータの値は干渉強度であり、
前記較正対象スキャンデータから前記OCTスキャンガイド上の前記1つまたは複数のマーカに対応する、干渉強度の基準フレーム番号および基準ライン番号を抽出するステップを有し、
前記スキャニングガイドを使用して取得された光干渉断層法(OCT)耳スキャンデータのセットを提供するステップを有し、ここで該スキャンデータは干渉強度値の3Dデータセットを包含し、
前記OCTスキャンガイド上の前記1つまたは複数のマーカに対応する干渉強度のフレーム番号およびライン番号を前記OCT耳スキャンデータから抽出するステップを有し、
前記OCT耳スキャンに関する開始位置および開始方向を、前記1つまたは複数のマーカの耳スキャンフレーム番号および耳スキャンライン番号および前記1つまたは複数のマーカの基準フレーム番号および基準フレームライン番号から求めるステップを有することを特徴とする、耳道を再構成する方法。
【請求項14】
さらに、各スキャンラインに関して、最大干渉強度値のピクセル番号を発見するステップを有し、前記スキャンガイドから前記ピクセルのオフセット距離を求めるステップを有し、前記距離オフセットデータから前記耳道の表面を再構成するステップを有する、請求項13記載の方法。
【請求項15】
前記スキャニングガイドは少なくとも2つの直線状の部分と1つの湾曲した部分とを有し、前記スキャニングガイドは回転するスキャニングプローブを収容することに適している、請求項13記載の方法。
【請求項16】
前記較正対象は、第1の端部において第1の固定具を有し、第2の端部において第2の固定具を有し、前記固定具は前記直線状の部分において前記較正ガイドを確実に保持することに適しており、外面の一部に沿って設けられている0の角方向を表す溝を有し、該溝は前記固定具の外面全体にわたっては延長していない、請求項15記載の方法。
【請求項17】
前記較正対象からの抽出は、さらに、
前記第1の固定具から干渉強度が現れる最後のフレームおよび前記溝から干渉強度が現れる最初のフレームを発見するステップを有し、
0の開始角方向を規定するために、前記溝が現れる前記最初のフレームから前記溝の中心線を選択するステップを有し、
前記溝が現れる前記最初のフレームの前記フレーム番号を、前記スキャニングガイドの前記直線状の部分の内の1つの長さおよび前記プローブの速度から求めるステップを有し、ここで前記フレーム番号は開始位置を規定し、
各スキャンラインに関して、最大干渉強度値のピクセル番号を発見するステップを有し、前記スキャンガイドから前記ピクセルのオフセット距離を求めるステップを有し、
前記距離オフセットデータから前記較正対象の表面を再構成するステップを有する、請求項16記載の方法。
【請求項18】
耳道を再構成するステップを実施するコンピュータにより実行可能なプログラム命令を具体的に実装している、コンピュータ読み出し可能記憶装置において
前記ステップは、
3Dデータセットを形成するピクセルのフレームおよびスキャンラインを含む耳の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで前記3Dデータセットの値は干渉強度を表し、
OCTスキャンガイドにおける1つまたは複数のマーカに対応する干渉強度のフレーム番号およびスキャンライン番号を抽出するステップを有し、
前記1つまたは複数のマーカに関する基準フレーム番号および基準ライン番号を受信するステップを有し、
耳スキャンマーカフレーム番号および耳スキャンマーカフレームライン番号および基準マーカフレーム番号および基準フレームライン番号から前記OCT耳スキャンに関する開始位置および開始方向を求めるステップを有し、
各スキャンラインに関して、最大干渉強度値のピクセル番号を発見し、前記スキャンガイドからの前記ピクセルのオフセット距離を求めるステップを有し、
前記距離オフセットデータから前記耳道の表面を再構成するステップを有することを特徴とする、コンピュータ読み出し可能記憶装置。
【請求項19】
前記ガイドからのピクセルjのオフセット距離dを次式より計算し、
【数9】
ここで、d0はガイドの中心からのオフセットであり、dsはサンプリングレートである、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項20】
前記耳道の表面を次式より再構成し、
【数10】
ここで、p→(i,j)はガイドに垂直なスキャンラインiを表し、jはスキャンラインに沿ったピクセルを表し、p→0はスキャンの空間内の開始位置であり、c→(t)はガイドの湾曲した経路であり、tはスキャンラインiに対応するガイド上の位置であり、またαはスキャンライン角度であり、u→およびv→は曲線c→(t)に垂直な平面における2D座標フレームを規定している相互に垂直な2つの単位ベクトルである、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項21】
【数11】
ここで、vは前記ガイド内に挿入されているスキャニングプローブのスキャン速度であり、fはスキャンラインサンプリング周波数であり、また、
【数12】
ここで、ωはプローブの角回転速度である、請求項20記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項22】
前記単位ベクトルu→およびv→を次式により定義し、
【数13】
ここで、w→は如何なる時点においても曲線c→(t)に垂直でないベクトルであり、t→は、
【数14】
として定義される曲線のタンジェントである、請求項20記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項23】
前記OCTスキャンデータを、回転可能なプローブが挿入されているガイドを含むOCTスキャン装置を提供し、前記プローブを前記ガイドにおいてスライドおよび回転させ、所定の間隔で前記プローブから近赤外線光を放射し、基準信号を有する反射光の干渉を測定し、前記干渉のデータをコンピュータ読み出し可能媒体に記憶することによって取得する、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項24】
前記方法は、各スキャンラインに対して、所定の閾値を上回る干渉強度を有するピクセルを選択するステップと、選択された前記ピクセルの前記スキャンガイドからのオフセット距離を求めるステップとを有する、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項25】
前記方法は、スキャンラインに関する最大干渉強度値のピクセル番号の発見に先行して、スキャンラインの開始における強度値を破棄するステップを有し、ここで前記値は前記スキャンガイド自体からの反射に対応する、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項26】
前記基準マーカフレーム番号および基準ライン番号を較正対象のOCTスキャンデータから抽出する、請求項18記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項27】
較正対象のOCTスキャンデータからの前記基準マーカフレーム番号および基準ライン番号の抽出は、
0の角方向を表すためにマークされた較正対象の光干渉断層法(OCT)スキャンデータのセットを提供するステップを有し、ここで、前記スキャンデータは3Dデータセットを形成するピクセルのフレームおよびラインを包含し、前記3Dデータセットの値は前記ガイドにおける1つまたは複数のマーカを有する較正ガイドを使用して取得された干渉強度の値であり、
前記較正ガイド上の前記マーカに対応する干渉強度のフレーム番号およびライン番号を抽出するステップを有し、
前記フレーム番号および前記ライン番号から前記較正ガイド上の前記マーカの空間的な位置を求めるステップを有する、請求項26記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項28】
前記ガイド上の前記マーカ位置を次式により計算し、
【数15】
ここで、αは前記ガイドに関する回転角であり、αmarkerはマーカの角方向であり、tmarkerはマーカのフレーム番号であり、nSα=0は0の角方向でのスキャンラインのライン番号であり、nSstartは開始ライン番号であり、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFstartは開始フレーム番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である、請求項27記載のコンピュータ読み出し可能プログラム記憶装置。
【請求項29】
前記開始位置tstartおよび前記開始方向αstartを次式によりマーカ位置tmarkerおよび方向αmarkerから計算し、
【数16】
ここで、nSmarkerはマーカ干渉強度値を有するスキャンラインのライン番号であり、nFmarkerはマーカ干渉強度値を有するフレームのフレーム番号であり、dαは角増分であり、Nはフレーム毎のライン数であり、Δtはスキャン経路に沿った解像度である、請求項18のコンピュータ読み出し可能プログラム記憶装置。
【図1】

【図2】
【図4】
【図5】

【図6】
【図19】
【図23】
【図3】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図20】
【図21】
【図22】
【図2】
【図4】
【図5】
【図6】
【図19】
【図23】
【図3】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図20】
【図21】
【図22】
【公開番号】特開2006−326292(P2006−326292A)
【公開日】平成18年12月7日(2006.12.7)
【国際特許分類】
【外国語出願】
【出願番号】特願2006−127860(P2006−127860)
【出願日】平成18年5月1日(2006.5.1)
【出願人】(593078006)シーメンス コーポレイト リサーチ インコーポレイテツド (47)
【氏名又は名称原語表記】Siemens Corporate Research,Inc.
【住所又は居所原語表記】755 College Road East,Princeton, NJ 08540,United States of America
【出願人】(301007744)シーメンス ヒアリング インストルメンツ インコーポレイテッド (7)
【氏名又は名称原語表記】Siemens Hearing Instruments,Inc.
【住所又は居所原語表記】10 Constitution Ave.,Piscataway,NJ 08855,U.S.A.
【Fターム(参考)】
【公開日】平成18年12月7日(2006.12.7)
【国際特許分類】
【出願番号】特願2006−127860(P2006−127860)
【出願日】平成18年5月1日(2006.5.1)
【出願人】(593078006)シーメンス コーポレイト リサーチ インコーポレイテツド (47)
【氏名又は名称原語表記】Siemens Corporate Research,Inc.
【住所又は居所原語表記】755 College Road East,Princeton, NJ 08540,United States of America
【出願人】(301007744)シーメンス ヒアリング インストルメンツ インコーポレイテッド (7)
【氏名又は名称原語表記】Siemens Hearing Instruments,Inc.
【住所又は居所原語表記】10 Constitution Ave.,Piscataway,NJ 08855,U.S.A.
【Fターム(参考)】
[ Back to top ]