
肘掛型遠隔操縦装置
【課題】長時間使用しても疲れないように手首を含む肘をのせたまま操縦できる遠隔操縦装置を開発すること。
【解決手段】肘掛部材(10)、第1、2連結部材(31、32)、ベース連結部材(40)が平行四辺形をなし第1連結部材の垂直軸に対する傾斜角度を検出する第1角度検出手段とベース連結部材の第3連結軸まわりの角度を検出する第2角度検出手段とベース部材の垂直軸部材まわりの角度を検出する第3角度検出手段と、第1連結部材の傾斜角に応じて復元力を生成する第1のバネ機構と肘掛部材の傾斜角に応じて復元力を生成する第2のバネ機構とを備える。バネ(12,13,33,34)の端部に取り付けたワイヤ(16,38)がバネ機構を含む肘掛部材の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするように非円形プーリ(23、43)に巻張されている。
【解決手段】肘掛部材(10)、第1、2連結部材(31、32)、ベース連結部材(40)が平行四辺形をなし第1連結部材の垂直軸に対する傾斜角度を検出する第1角度検出手段とベース連結部材の第3連結軸まわりの角度を検出する第2角度検出手段とベース部材の垂直軸部材まわりの角度を検出する第3角度検出手段と、第1連結部材の傾斜角に応じて復元力を生成する第1のバネ機構と肘掛部材の傾斜角に応じて復元力を生成する第2のバネ機構とを備える。バネ(12,13,33,34)の端部に取り付けたワイヤ(16,38)がバネ機構を含む肘掛部材の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするように非円形プーリ(23、43)に巻張されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はロボットや仮想現実下の操縦対象を、手首を含む肘を載置したまま遠隔操縦することのできる肘掛型遠隔操縦装置に関する。
【背景技術】
【0002】
ロボットや仮想現実下の操縦対象の遠隔操縦がすでにいろいろな分野で使用されている。例えば、災害地や危険地区、あるいは、極限環境、宇宙空間での作業、物の移動等のために遠隔操縦が行われており、また、医療等の分野では手術トレーニング装置、遠隔手術のための遠隔操縦の研究が進められている。また、アミューズメント分野においては仮想現実下の操縦対象の遠隔操縦の開発が進められている。
【0003】
ロボットの遠隔操縦をおこなうということは、ロボットのオペレータの操作情報(通常は手の動き)を検出してロボットに送り、ロボットが送られた操作情報にもとづき操作をおこなうということである。最近では、より適確な操作がおこなうことができるように力覚のフィードバックをおこなうものもあり、それも含めて多くの研究、開発が行われている。
【0004】
また、仮想現実下の遠隔操縦をおこなうということは、仮想現実下において計算機上に表現された操縦対象を操縦装置の情報をもとに動作させるということである。ロボットの場合と同様に仮想現実下で表現された操縦対象に接触した場合には、対象に接触した場合に操縦対象が感じるであろう感覚を擬似的に創出し、操縦装置にフィードバックするような研究も数多くおこなわれている。
【0005】
ところで、操縦対象の遠隔操縦は必ずしも屋内で行われるものではなく、例えば、災害現場においてレスキュー隊が屋外でロボットを遠隔操縦しなければならないことがある。
その際には、机等の大きな付随物を必要とせず災害現場まで容易に運搬できること、長時間操縦しても疲れないこと等が要求される。
【0006】
これまで良く使われる遠隔操縦装置としては、ジョイスティックがあるが、これは最大3自由度の限られた角度の指令しか出来ない。また机に置く必要があった。
特許文献1の装置は球面リンク機構をもちいており比較的コンパクトな構造を有するものであるが、力覚を与えようとすると動き回る関節部分にモータ等の駆動系を取り付けねばならず、その分大きな質量を動かさねばならず軽快な操作感が得られない恐れがある。
特許文献2、特許文献3は1つの回転中心周りに3軸方向のモーメントを生成する手術シュミレータである。しかし、赤道部、南極部に複雑な機構を配設する必要があり、大きなスペースを要する。
【0007】
非特許文献1の図4の装置は球座標型の5節リンク機構を用いているが軸回転部A,Bが離間しており経度方向の可動範囲が大きくとれない。
非特許文献2の装置は力覚フィードバックをおこなう装置であるが装置が多数のリンクを含み構造が複雑であり、かつ大型であり、台上に設置して使用することが必要と思われ使用範囲が限定される。
非特許文献3の装置も非特許文献1の装置と同様に台上に設置して使用することが必要と思われ使用範囲が限定される。
【0008】
机を必要としない方式としては、非特許文献4のように操作者の背中にバックパックを背負いそこから操縦桿を伸ばす方式の操縦桿も開発されているが、どうしても重くなり、立位姿勢で長期間操縦しなければならない。また、操作者に力感覚を与えようとすると、操作者にその力が働くためうまく作動しない。ゲーム用のWii(登録商標)コントローラのような操縦桿では手を常に空中に浮かして指令値を生成するため、長時間の操作では疲れやすく、また精密な指令はし難い、などの問題があった。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2009−274200
【特許文献2】米国特許出願公開2005/0162383
【特許文献3】米国特許出願公開2004/0145563A9
【非特許文献】
【0010】
【非特許文献1】Bernard D. Adelstein et al, "KINEMATIC DESIGN OF A THREE DEGREE OF FREEDOM PARALLEL HAND CONTROLLER MECHANISM, Proceedings of the ASME Dynamic Systems and Control Division, DSC-Vol. 58, pp.539-546, 1996
【非特許文献2】Y.Tsumaki et al. "Design of Compact 6-DOF Haptic Interface
【非特許文献3】荒田他「パラレルリンク機構を用いた力覚提示装置 DELTA−4の開発」、日本ロボット学会誌27巻8号
【非特許文献4】Ingo Kossyk et al. "Design and evaluation of a wearable haptic interface for large workspaces", The 2010 IEEE/RSJ International Robots and Systems October 18-22, 2010, Taipei, Taiwan
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、上記問題に鑑み、長時間使用しても疲れないように、手首を含む肘を載置したまま遠隔操縦できる肘掛型遠隔操縦装置を開発することを目的とする。
【課題を解決するための手段】
【0012】
請求項1の発明によれば、肘掛型遠隔操縦装置であって、
オペレータの手首を含む肘を載せるための肘掛部材であって、第1連結軸を介して第1連結部材の上端が回動自在に取り付けられ、第2連結軸を介して第2連結部材の上端が回動自在に取り付けられている肘掛部材と、
ベース連結部材であって、第1連結部材の下端が第3連結軸を介して回動自在に連結され、第2連結部材の下端が第4連結軸を介して回動自在に連結されている、ベース連結部材と、
第3連結軸が固定されたベース部材であって、地面に立設される垂直軸部材に回動自在に取り付けられるベース部材と、を具備し、
第1連結軸と第2連結軸の距離と第3連結軸と第4連結軸との距離が等しく、第1連結軸と第3連結軸の距離と第2連結軸と第4連結軸の距離が等しくされ、肘掛部材、第1連結部材、第2連結部材、ベース連結部材が平行四辺形をなしており、
第1連結部材の第3連結軸周りの回転角度を検出可能な第1角度検出手段と、ベース連結部材の第3連結軸まわりの回転角度を検出可能な第2角度検出手段と、ベース部材の垂直軸部材まわりの角度を検出可能な第3角度検出手段と、を備えて、肘掛部材の状態を検出し、かつ、
第1連結部材の基準角度からの傾斜角に応じて第3連結軸周りの復元力を生成する第1のバネ機構と、ベース連結部材に平行な肘掛部材の基準角度からの傾斜角に応じて第1連結軸周りの復元力を生成する第2のバネ機構と、を備えて、肘掛部材の状態に応じた復元力を提供する、
ことを特徴とする肘掛型遠隔操縦装置が提供される。
【0013】
請求項2の発明によれば、第1のバネ機構のバネは第1連結部材に取り付けられ、バネの端部から延伸されたワイヤが第3連結軸に対して固定されている下部非円形プーリの外周に巻張された後に下部非円形プーリに対して固定されており、前記第3連結軸に対して固定されている下部非円形プーリは、第1連結部材の垂直軸に対する傾きに係らず、肘掛部全体の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするバネ力を第1のバネ機構に発生せしめる形状とされている。
請求項3の発明によれば、第2のバネ機構のバネは肘掛部材に取り付けられ、バネの端部から延伸されたワイヤが第1連結軸に対して固定されている上部非円形プーリの外周に巻張された後に上部非円形プーリに対して固定されており、
前記第1連結軸に対して固定されている上部非円形プーリは、肘掛部材の水平軸に対する傾きに係らず、第2のバネ機構を含む肘掛部材の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするバネ力を第2のバネ機構に発生せしめる形状とされており、第1連結軸と第3連結軸が連結手段を介して連結されていて、一方の連結軸の回動と同じ回動が他方の連結軸に伝達される。
請求項4の発明によれば、第2のバネ機構のバネは肘掛部材に取り付けられ、バネの端部から延伸されたワイヤが第2連結軸に対して固定されている円形プーリ、第4連結軸に対して固定されている円形プーリを経由して第3連結軸に対して固定されている第2の下部非円形プーリの外周に巻張されてから第2の下部非円形プーリに対して固定されている。
請求項5の発明によれば、第1のバネ機構と第2のバネ機構は、バネ力を調整可能である。
請求項6の発明によれば、第3連結軸部材まわりの回転に対してトルクを与えることで手先部に前後方向の力覚を与える駆動手段と、
ベース連結部材の第3連結軸まわりの回転に対してトルクを与えることで手先部に上下方向の力覚を与える駆動手段と、
ベース部材の垂直軸部材まわりの回転に対してトルクを与えることで手先部に左右方向の力覚を与える駆動手段と備える。
請求項7の発明によれば、垂直軸部材が、折りたたみ椅子の後脚とされる。
【発明の効果】
【0014】
本発明の肘掛型遠隔操縦装置は手首を含む肘を載置したまま遠隔操縦でき、かつ、肘の位置に応じて保持力が生成されるので長時間使用しても疲れない。
特に請求項7のようにすれば持ち運び、設置が容易であり、どのようなところでも遠隔操縦をおこなうことができる。
【図面の簡単な説明】
【0015】
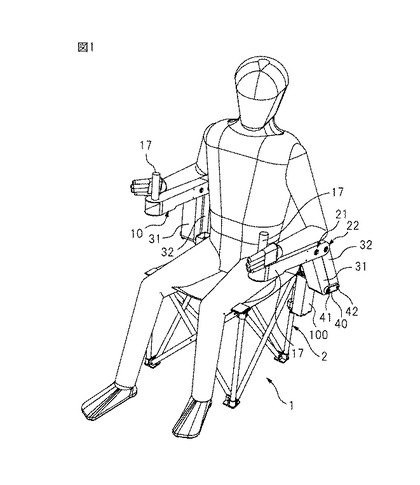
【図1】折りたたみ椅子に取り付けられている本発明の第1の実施形態の肘掛型操縦装置が椅子に腰掛けたオペレータにより操縦されている様子を示す図である。
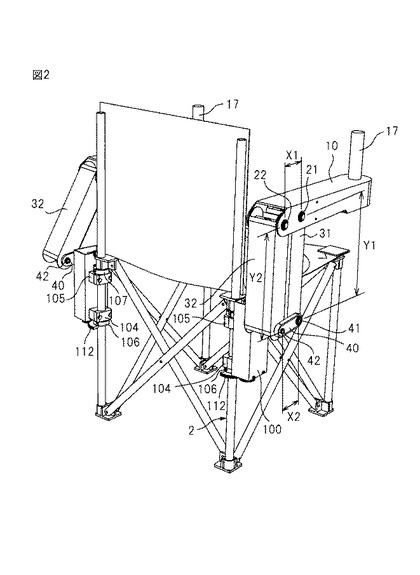
【図2】図1の肘掛型操縦装置を斜め後方から見た図である。
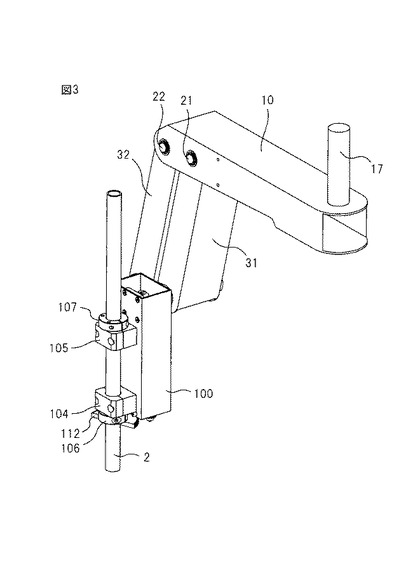
【図3】図1の肘掛型操縦装置の主要部の外観の拡大図である。
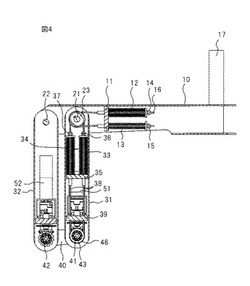
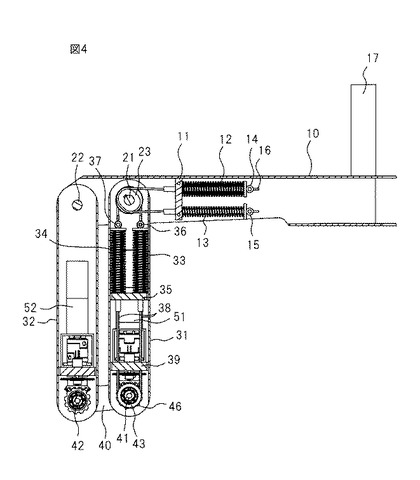
【図4】肘掛部材10、第1連結部材31、第2連結部材32の内部を示す図である。
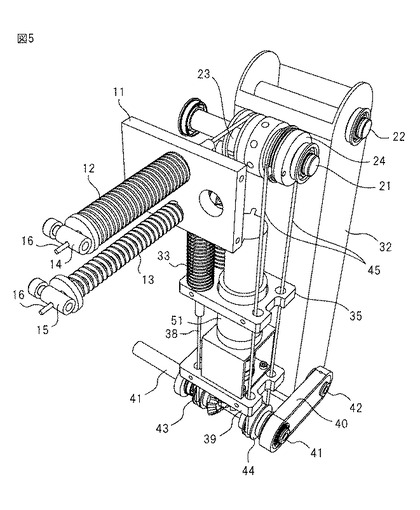
【図5】肘掛部材10、第1連結部材31、第2連結部材32の内部を拡大して示す図である。
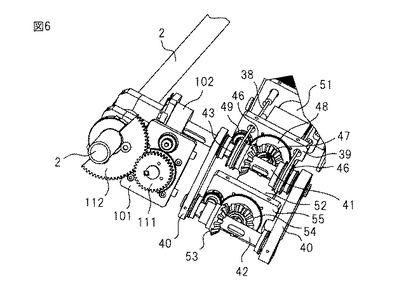
【図6】第1連結部材31、第2連結部材32、ベース部材100を下方から見た図である。
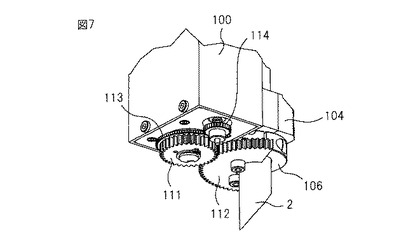
【図7】ベース部材100の下部の拡大図である。
【図8】ベース部材100の内部を示す図である。
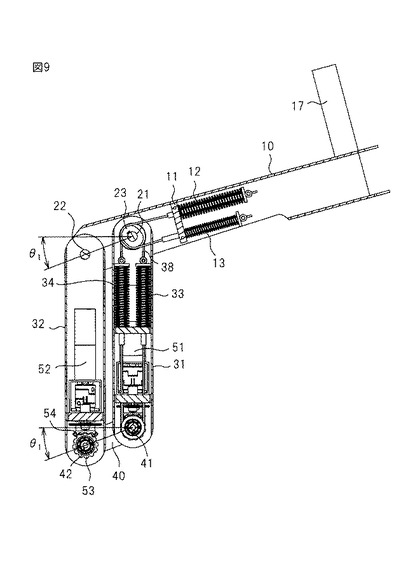
【図9】肘掛部材10の前端を上に引き上げたときの肘掛部材10、第1連結部材31、第2連結部材32の内部を示す図である。
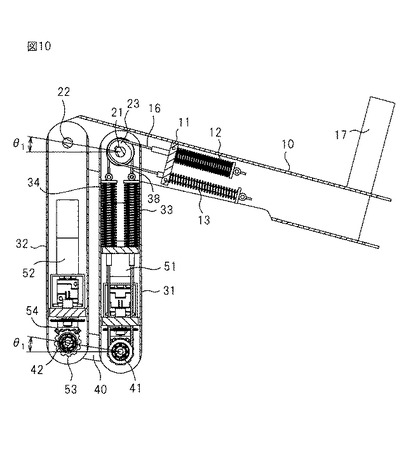
【図10】肘掛部材10の前端を下に押し下げたときの肘掛部材10、第1連結部材31、第2連結部材32の内部を示す図である。
【図11】図4(ニュートラル状態)、図8(肘掛部材10の前端を上に引き上げたとき)、図9(肘掛部材10の前端を下に押し下げたとき)の場合における上部非円形カム23と第2ワイヤ16と第1水平バネ12の状態を示す比較図である。
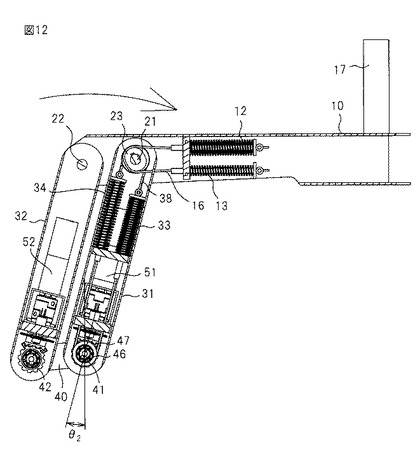
【図12】肘掛部材10を前方に押し出したときの肘掛部材10、第1連結部材31、第2連結部材32の内部を示す図である。
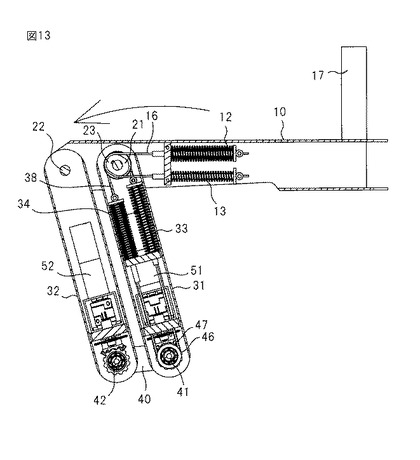
【図13】肘掛部材10を後方に引いたときの肘掛部材10、第1連結部材31、第2連結部材32の内部を示す図である。
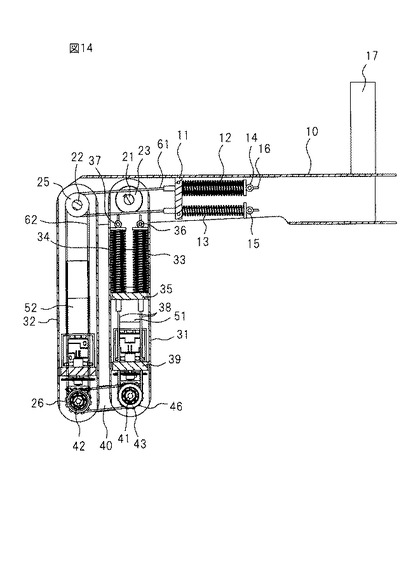
【図14】第2の実施形態の肘掛型操縦装置の構成を示す図である。
【発明を実施するための形態】
【0016】
以下、添付の図面を参照して本発明の実施形態を説明する。まず、第1の実施形態について説明意する。
図1は椅子に取り付けられている本発明の第1の実施形態の肘掛型操縦装置が椅子に腰掛けたオペレータにより操縦されている様子を示す図である。図2は椅子に取り付けられている肘掛型操縦装置を斜め後方から見た図である。図3は本発明の肘掛型操縦装置の主要部の外観の拡大図であり、図4は主要部の内部を示す図である。図5は肘掛部材10、第1連結部材31を取り除いて示す図である。
肘掛部材10に第1連結部材31と第2連結部材32が、それぞれ第1連結軸21と第2結軸22を介して、連結されている。第1連結部材31と第2連結部材32はそれぞれ第3連結軸41と第4連結軸42を介してベース連結部材40に連結されている。
【0017】
第1連結軸21と第2連結軸22との間の軸間距離X1と第3連結軸41と第4連結軸42との間の軸間距離X2は等しく、第1連結軸21と第3連結軸41との間の軸間距離Y1は第1連結軸21と第4連結軸42との間の軸間距離Y2は等しくされており、第1連結軸21と第2結軸22と第3連結軸41と第4連結軸42を連節点とする変形可能な平行四辺形が形成されている。参照符号100で示されるのはベース部材である。
【0018】
図4、5に示されるように肘掛部材10の内部には、水平バネ取り付け部材11が取り付けられており、水平バネ取り付け部材11には第1水平バネ12と第2水平バネ13が取り付けられている。第2ワイヤ16が第1水平バネ12と第2水平バネ13の内部を通って配置され、第1水平バネ12と第2水平バネ13の水平バネ取り付け部材11とは反対側の端部において、それぞれ第1水平バネストッパ14と第2水平バネストッパ15が第2ワイヤ16に取り付けられている。
【0019】
第1連結部材31の内部には、垂直バネ取り付け部材35が取り付けられており、垂直バネ取り付け部材35には第1垂直バネ33と第2垂直バネ34が取り付けられている。第1ワイヤ38が第1垂直バネ33と第2垂直バネ34の内部を通って配置され、第1垂直バネ33と第2垂直バネ34の垂直バネ取り付け部材35とは反対側の端部において、それぞれ第1垂直バネストッパ36と第2垂直バネストッパ37が第1ワイヤ38に取り付けられている。
【0020】
第1連結軸21には上部非円形プーリ23と上部円形プーリ24が固定されており、第2ワイヤ16は上部非円形プーリ23に巻張され、かつ、1点において上部非円形プーリ23に固定されている。第3連結軸41には下部非円形プーリ43と下部円形プーリ44が固定されており、第2ワイヤ16は上部非円形プーリ23に巻張され、かつ、1点において下部非円形プーリ43に固定されている。
上部円形プーリ24と下部円形プーリ44は第3ワイヤ45で連動回転するように連結されている。
【0021】
第1連結部材31の内部には、第1モータ取り付け部材39が取り付けられており、第1モータ取り付け部材39には第1モータ51が固定されている。第1モータ51の軸には第2傘歯車47が取り付けられており、第2傘歯車47は第3連結軸41に取り付けられている第1傘歯車46と噛合っている。
【0022】
第1連結部材31と同様に第2連結部材32の内部には第2モータ52が第2モータ取り付け部材55に取り付けられており、第2モータ52の軸に取り付けられた第4傘歯車54が第4連結軸42に取り付けられた第3傘歯車53と噛合している。
【0023】
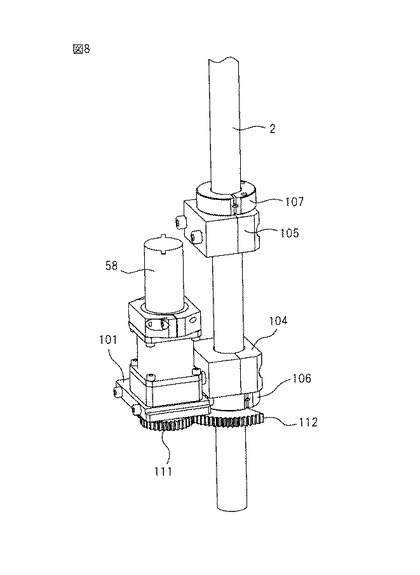
図6は第1連結部材31、第2連結部材32、ベース部材100を下方から見た図であるが、この図6において、参照符号101で示されるのはベース部材100の内部に固定される第3モータ取り付け部材であって、第3モータ取り付け部材101には図8において参照符号58でしめされている第3モータが取り付けられている。
また、参照符号102で示されるのは第3連結軸41をベース部材100の内部に固定する固定部材である。
【0024】
図7はベース部材100の下部の拡大図であるが、この図7に示されるように、ベース部材100の外側にベース部材100を参照符号2で示される椅子の後脚に取り付けるための第1装着部材104、第2装着部材105が固定されている。第1装着部材104、第2装着部材105は椅子の脚部1に対しては回動可能である。
図8はベース部材100の内部を示す図であって、第3モータ取り付け部材101に取り付けられた第3モータ58が示されている。
【0025】
以下、上記のように構成された肘掛型操縦装置の作動について説明する。
図4はニュートラルな状態で、オペレータが肘掛部材10を上下、前後、左右のいずれにも動かしていない状態を示しているが、図9はオペレータが肘掛部材10の前端を上方に移動せしめたときの状態を示し、図10はオペレータが肘掛部材10の前端を下方に移動せしめたときの状態を示し、図11はオペレータが肘掛部材10を前方に移動せしめたときの状態を示し、図12はオペレータが肘掛部材10を後方に移動せしめたときの状態を示している。
【0026】
図9に示す状態では、肘掛部材10は前端が上方に傾斜し第1水平バネ12が伸び、第2水平バネ13が縮み、第1垂直バネ33と第2垂直バネ34はニュートラルな状態と同じ長さを保っている。肘掛部材10の水平軸に対する傾斜角をθ1とするとθ1はベース連結部材40の水平軸に対する傾斜角に等しく、この傾斜角θ1は第2連結部材32内に配設されている第2モータ52に隣接して配設されている図示しない角度検出部材によって検出される。
【0027】
すなわち、ベース連結部材40に第4連結軸42が固定されており、第2連結部材32が回動すると第4連結軸42が公転回転するのでそれにより第3傘歯車53が回転してそれに噛合している第4傘歯車54が回転し、第4傘歯車54が取り付けられている第2モータ52の軸が回転し、その第2モータ52の軸に取り付けられているギヤ56に噛合しているギヤ57が回転し、このギヤ57が取り付けられている軸の回転の角度が第2モータ取り付け部材55の裏側の図示されない角度検出部材によって検出されるのである(図6参照)。この角度検出部材が特許請求の範囲の記載における第2角度検出手段に相当する。
【0028】
図10に示す状態では、肘掛部材10は前端が下方に傾斜し第1水平バネ12が縮み、第2水平バネ13が伸び、第1垂直バネ33と第2垂直バネ34はニュートラルな状態と同じ長さを保っている。肘掛部材10の水平軸に対する傾斜角θ1は図8の場合とは逆に水平軸より下方に向かうが上述の図示されない角度検出部材によって同様に検出される。
【0029】
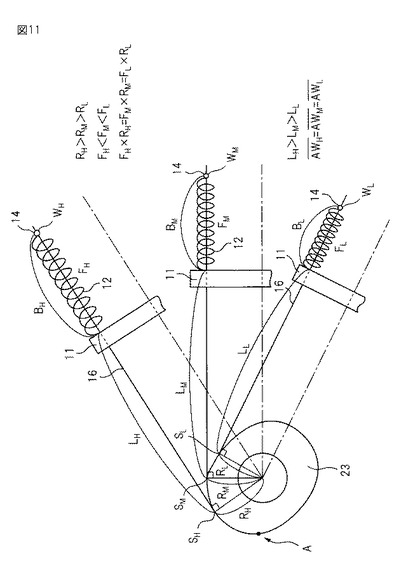
上記の図4、図9、図10に示される状態における第1水平バネ12、第2水平バネ13の作用について図11を参照して説明する。
図11において、第1水平バネ12が上部非円形プーリ23の真横に記載されているのが図4に示される状態であり、第1水平バネ12が上部非円形プーリ23の斜め上方に記載されているのが図10に示される状態であり、第1水平バネ12が上部非円形プーリ23の斜め下方に記載されているのが図11に示される状態である。
【0030】
上部非円形プーリ23上に仮想基準点Aを仮定する。また、図4、図9、図10に示される状態における第1バネストッパ14の位置をそれぞれWH,WM,WLと仮定し、図4、図9、図10に示される状態におけるワイヤ16が上部非円形プーリ23から離れる点をそれぞれSH,SM,SLと仮定する。そして、図4、図9、図10に示される状態における上部非円形プーリ23の中心から離れる点上部非円形プーリ23から離れる点SH,SM,SLとから垂直バネ取り付け部材11の外側面までの距離をLH,LM、LLとする。
【0031】
AからWHまでの距離=AからWMまでの距離=AからWLまでの距離であり、
AからSHまでの距離<AからSMまでの距離<AからSLまでの距離であり、
LH>LM>LLである。
したがって、図4、図9、図10に示される状態における第1水平バネ12の長さをそれぞれBH,BM,BLとすれば、BH>BM>BLである。
【0032】
したがって、図4、図9、図10に示される状態における第1水平バネ12のバネ力をFH,FM,FLとすると、このバネは圧縮されると伸びようとする力を発生するものであり、縮められて短くされるほど大きい力を発生するものであるのでFH<FM<FLとなる。
そして、このバネ力は垂直バネ取り付け部材11を上部非円形プーリ23側に押しやろうとする力である。
一方、図4、図9、図10に示される状態における上部非円形プーリ23の中心から離れる点上部非円形プーリ23から離れる点SH,SM,SLまでの距離をRH,RM、RLとすると、RH>RM>RLである。
【0033】
図4、図9、図10に示される状態においては、それぞれ、第1連結軸21には、FH×RH、FM×RM、FL×RLの反時計回りのトルクがかかる。
ここで、上述のようにFH<FM<FLであり、RH>RM>RLである。
したがって、FH×RH、FM×RM、FL×RLの値を一定にすることができる。
すなわち、FH×RH、FM×RM、FL×RLの値が一定になるように上部非円形プーリ23のプーリの外周形状が決められている。
その際、オペレータの肘(手首を含む)の重量と肘掛部材10の重量(内部の機構の重量を含む)を補償できる、すなわち上記重量を感じさせない、ようにバネが設定される。
【0034】
図12、図13に示されるように肘掛部材10が前方、あるいは、後方に移動せしめられ第1水平バネ12、第2水平バネ13が伸縮しない状態では、第1垂直バネ33、第2垂直バネ34が上述の第1水平バネ12、第2水平バネ13と同様な動きと作用をおこなう。
そして、第1連結部材31の垂直軸線からの傾斜θ2は第1連結部材31内に配設されている第1モータ51に付設されている図示しない角度検出部材によって検出される。
【0035】
すなわち、ベース連結部材40に第3連結軸41が固定されており、第1連結部材31が回動すると第3連結軸41が公転回転するのでそれにより第1傘歯車46が回転してそれに噛合している第2傘歯車47が回転し、第2傘歯車47が取り付けられている第1モータ51の軸が回転し、その第1モータ51の軸に取り付けられているギヤ48に噛合しているギヤ49が回転し、このギヤ49が取り付けられている軸の回転の角度が第1モータ取り付け部材39の裏側の図示されない角度検出部材によって検出されるのである(図6参照)。この角度検出部材が特許請求の範囲の記載における第1角度検出手段に相当する。
【0036】
肘掛部材10およびが上または下に傾斜せしめられ、第1連結部材31(および第2連結部材32)も前方または後方に移動せしめることも可能である。前述のように、上部円形プーリ24と下部円形プーリ44は第3ワイヤ45で連動回転するように連結されているので、例えば、肘掛部材10およびが上に傾斜せしめられ、第1連結部材31(および第2連結部材32)が前方に移動せしめられた場合には、上部非円形プーリ23、下部非円形プーリ43は、図9に示した場合よりも、時計回り方向に回転しており、その結果、バネ力はより小さくなる。
【0037】
次に、垂直軸線まわりの回動の角度θ3の検出について説明する。
図8において、参照符号111で示されるのは図示しない第3モータの軸に取り付けられている歯車であり、歯車111は半円形のセクター歯車112と噛合している。セクター歯車112は脚部1に対して固定される第1位置決め部材106に固定されている。一方、第2装着部材105の上側には同様に脚部1に対して固定される第2位置決め部材107が配置される。
【0038】
第1位置決め部材106と第2位置決め部材107でベース部材100に取り付けられている第1装着部材104と第2装着部材105を上下方向から挟むようにして全体の取り付け高さが決められるが、前述のように第1装着部材104、第2装着部材105は椅子の脚部1に対して固定されていないのでベース部材100を介して全体が脚部1の周りを回動することができる。
【0039】
図7に示されるように、第3モータの軸にはセクター歯車112と噛合する歯車111の他に歯車113が取り付けられており、この歯車113はより小径の歯車114と噛合している。そしてこの歯車114の取り付けられている軸の回転の角度が垂直軸線まわりの回動の角度θ3として第3モータ取り付け部材101の裏側の図示されない角度検出部材によって検出されるのである。この角度検出部材が特許請求の範囲の記載における第3角度検出手段に相当する。
【0040】
次に、図14を参照して、第2の実施形態について説明する。
第2の実施形態は第1の実施形態と同様な、肘掛部材10、ベース連結部材40、第1連結部材31、第2連結部材32を含み、第1連結軸21と第2連結軸22と第3連結軸41と第4連結軸42を連節点とする変形可能な平行四辺形を形成している。
【0041】
そして、第1の実施形態とは異なり、第1連結軸21に上部円形プーリ24が取り付けられておらず、第3連結軸に下部円形プーリ44が取り付けられておらず、その代わりに、第2連結軸22に上部円形プーリ25が、第4連結軸42には下部円形プーリ25が取り付けられている。そして、第3連結軸41には第1の実施形態の下部非円形プーリ43に加えて、同様な第2下部非円形プーリ27が取り付けられている。第2下部非円形プーリ27は図中下左部分で半径変化による効果を発揮するようにされている。
【0042】
水平バネ取り付け部材11には、第1の実施形態と同様に、第1水平バネ12と第2水平バネ13が取り付けられている。第1の実施形態の第2ワイヤ16よりも長い第1ロングワイヤ61が第1水平バネストッパ14のところを始点として図中反時計回りに上部円形プーリ25と下部円形プーリ26に部分周接してから第2下部非円形プーリ27に達しその第2下部非円形プーリ27の半径変化による効果を発揮しない部分、例えば、図中右中間部分、に固定されている。
【0043】
一方、第2ロングワイヤ62が第2水平バネストッパ15のところを始点として上部円形プーリ25に第1ロングワイヤ61とは反対に時計周りに部分周接し、下部円形プーリ26にも時計周りに部分周接してから第2下部非円形プーリ27に達しその第2下部非円形プーリ27の半径変化による効果を発揮しない部分、例えば、図中右中間部分、に固定されている。
【0044】
上述のように、上部円形プーリ25と下部円形プーリ26は第1ロングワイヤ61と第2ロングワイヤ62が周接するのでそれぞれ2個づつ形成されている。なお、ニュートラル状態から変移せしめられたときに第1ロングワイヤ61と第2ロングワイヤ62は、上部円形プーリ25、下部円形プーリ26、および、第2下部非円形プーリ27を互いに逆方向に回転せしめようとする。
【0045】
この第2の実施形態においては、第1連結軸21に上部円形プーリ24が取り付けられておらず、第3連結軸に下部円形プーリ44が取り付けられておらず、もちろん、第3ワイヤ45もない。したがって、第1連結部材31の内部に構成部品が集中的に配置されることが防止され、組み立てが容易になるという利点がある。
【0046】
前述した第1モータ51、第2モータ52、および、第3モータ58に付設された角度検出センサの検出した信号によって肘掛部材の位置、姿勢を含む状態を特定することができる。この信号は、図示しない、適切な、有線または無線の伝達手段によりロボット等の操縦対象に伝達され、伝達された信号にもとづきロボット等の操縦対象の対応する部位が動いて所望の操作が行われる。
ここで、ロボット等の操縦対象が何らかの対象物に接触し反力を受けるとその反力はロボット等にあらかじめ備えられたセンサにより検出され、その信号が本発明の遠隔操縦装置に伝達される。
【0047】
すると、伝達された信号にもとづいて第1モータ51、第2モータ52、および、第3モータ58が作動せしめられてオペレータに力覚が与えられるが、その際に力覚が目標値になるようにモータにはその力に相当する電流が供給される。なお、力覚はあらかじめ定めた倍力比によりロボットが検出した力に対して倍力されるが、倍力比は1より小さい場合もあれば、1より大きい場合もある。
上記のような信号の送受、倍力比の設定、および、前述したロール角の検出値の補正等のためにベース部材100内に、図示しないが制御装置が設けられている。
【産業上の利用可能性】
【0048】
本発明はロボットや仮想現実下の操縦対象を遠隔操縦するための遠隔操縦装置であり、遠隔操縦をおこなうロボットや仮想現実を利用するアミューズメント装置等に広く適用できる。
特にはレスキュー隊等が屋外で使用するロボットを遠隔操縦する場合に適している。
【符号の説明】
【0049】
1 椅子
2 後脚
10 肘掛部材
11 水平バネ取り付け部材
12 第1水平バネ
13 第2水平バネ
16 第2ワイヤ
17 グリップ
21 第1連結軸
22 第2連結軸
23 上部非円形プーリ
24 上部円形プーリ
25 上部円形プーリ
26 下部円形プーリ
27 第2下部非円形プーリ
31 第1連結部材
32 第2連結部材
33 第1垂直バネ
34 第2垂直バネ
35 垂直バネ取り付け部材
38 第1ワイヤ
40 ベース連結部材
41 第3連結軸
42 第4連結軸
43 下部非円形プーリ
44 下部円形プーリ
45 第3ワイヤ
51 第1モータ
52 第2モータ
58 第3モータ
100 ベース部材
112 セクター歯車
【技術分野】
【0001】
本発明はロボットや仮想現実下の操縦対象を、手首を含む肘を載置したまま遠隔操縦することのできる肘掛型遠隔操縦装置に関する。
【背景技術】
【0002】
ロボットや仮想現実下の操縦対象の遠隔操縦がすでにいろいろな分野で使用されている。例えば、災害地や危険地区、あるいは、極限環境、宇宙空間での作業、物の移動等のために遠隔操縦が行われており、また、医療等の分野では手術トレーニング装置、遠隔手術のための遠隔操縦の研究が進められている。また、アミューズメント分野においては仮想現実下の操縦対象の遠隔操縦の開発が進められている。
【0003】
ロボットの遠隔操縦をおこなうということは、ロボットのオペレータの操作情報(通常は手の動き)を検出してロボットに送り、ロボットが送られた操作情報にもとづき操作をおこなうということである。最近では、より適確な操作がおこなうことができるように力覚のフィードバックをおこなうものもあり、それも含めて多くの研究、開発が行われている。
【0004】
また、仮想現実下の遠隔操縦をおこなうということは、仮想現実下において計算機上に表現された操縦対象を操縦装置の情報をもとに動作させるということである。ロボットの場合と同様に仮想現実下で表現された操縦対象に接触した場合には、対象に接触した場合に操縦対象が感じるであろう感覚を擬似的に創出し、操縦装置にフィードバックするような研究も数多くおこなわれている。
【0005】
ところで、操縦対象の遠隔操縦は必ずしも屋内で行われるものではなく、例えば、災害現場においてレスキュー隊が屋外でロボットを遠隔操縦しなければならないことがある。
その際には、机等の大きな付随物を必要とせず災害現場まで容易に運搬できること、長時間操縦しても疲れないこと等が要求される。
【0006】
これまで良く使われる遠隔操縦装置としては、ジョイスティックがあるが、これは最大3自由度の限られた角度の指令しか出来ない。また机に置く必要があった。
特許文献1の装置は球面リンク機構をもちいており比較的コンパクトな構造を有するものであるが、力覚を与えようとすると動き回る関節部分にモータ等の駆動系を取り付けねばならず、その分大きな質量を動かさねばならず軽快な操作感が得られない恐れがある。
特許文献2、特許文献3は1つの回転中心周りに3軸方向のモーメントを生成する手術シュミレータである。しかし、赤道部、南極部に複雑な機構を配設する必要があり、大きなスペースを要する。
【0007】
非特許文献1の図4の装置は球座標型の5節リンク機構を用いているが軸回転部A,Bが離間しており経度方向の可動範囲が大きくとれない。
非特許文献2の装置は力覚フィードバックをおこなう装置であるが装置が多数のリンクを含み構造が複雑であり、かつ大型であり、台上に設置して使用することが必要と思われ使用範囲が限定される。
非特許文献3の装置も非特許文献1の装置と同様に台上に設置して使用することが必要と思われ使用範囲が限定される。
【0008】
机を必要としない方式としては、非特許文献4のように操作者の背中にバックパックを背負いそこから操縦桿を伸ばす方式の操縦桿も開発されているが、どうしても重くなり、立位姿勢で長期間操縦しなければならない。また、操作者に力感覚を与えようとすると、操作者にその力が働くためうまく作動しない。ゲーム用のWii(登録商標)コントローラのような操縦桿では手を常に空中に浮かして指令値を生成するため、長時間の操作では疲れやすく、また精密な指令はし難い、などの問題があった。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2009−274200
【特許文献2】米国特許出願公開2005/0162383
【特許文献3】米国特許出願公開2004/0145563A9
【非特許文献】
【0010】
【非特許文献1】Bernard D. Adelstein et al, "KINEMATIC DESIGN OF A THREE DEGREE OF FREEDOM PARALLEL HAND CONTROLLER MECHANISM, Proceedings of the ASME Dynamic Systems and Control Division, DSC-Vol. 58, pp.539-546, 1996
【非特許文献2】Y.Tsumaki et al. "Design of Compact 6-DOF Haptic Interface
【非特許文献3】荒田他「パラレルリンク機構を用いた力覚提示装置 DELTA−4の開発」、日本ロボット学会誌27巻8号
【非特許文献4】Ingo Kossyk et al. "Design and evaluation of a wearable haptic interface for large workspaces", The 2010 IEEE/RSJ International Robots and Systems October 18-22, 2010, Taipei, Taiwan
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、上記問題に鑑み、長時間使用しても疲れないように、手首を含む肘を載置したまま遠隔操縦できる肘掛型遠隔操縦装置を開発することを目的とする。
【課題を解決するための手段】
【0012】
請求項1の発明によれば、肘掛型遠隔操縦装置であって、
オペレータの手首を含む肘を載せるための肘掛部材であって、第1連結軸を介して第1連結部材の上端が回動自在に取り付けられ、第2連結軸を介して第2連結部材の上端が回動自在に取り付けられている肘掛部材と、
ベース連結部材であって、第1連結部材の下端が第3連結軸を介して回動自在に連結され、第2連結部材の下端が第4連結軸を介して回動自在に連結されている、ベース連結部材と、
第3連結軸が固定されたベース部材であって、地面に立設される垂直軸部材に回動自在に取り付けられるベース部材と、を具備し、
第1連結軸と第2連結軸の距離と第3連結軸と第4連結軸との距離が等しく、第1連結軸と第3連結軸の距離と第2連結軸と第4連結軸の距離が等しくされ、肘掛部材、第1連結部材、第2連結部材、ベース連結部材が平行四辺形をなしており、
第1連結部材の第3連結軸周りの回転角度を検出可能な第1角度検出手段と、ベース連結部材の第3連結軸まわりの回転角度を検出可能な第2角度検出手段と、ベース部材の垂直軸部材まわりの角度を検出可能な第3角度検出手段と、を備えて、肘掛部材の状態を検出し、かつ、
第1連結部材の基準角度からの傾斜角に応じて第3連結軸周りの復元力を生成する第1のバネ機構と、ベース連結部材に平行な肘掛部材の基準角度からの傾斜角に応じて第1連結軸周りの復元力を生成する第2のバネ機構と、を備えて、肘掛部材の状態に応じた復元力を提供する、
ことを特徴とする肘掛型遠隔操縦装置が提供される。
【0013】
請求項2の発明によれば、第1のバネ機構のバネは第1連結部材に取り付けられ、バネの端部から延伸されたワイヤが第3連結軸に対して固定されている下部非円形プーリの外周に巻張された後に下部非円形プーリに対して固定されており、前記第3連結軸に対して固定されている下部非円形プーリは、第1連結部材の垂直軸に対する傾きに係らず、肘掛部全体の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするバネ力を第1のバネ機構に発生せしめる形状とされている。
請求項3の発明によれば、第2のバネ機構のバネは肘掛部材に取り付けられ、バネの端部から延伸されたワイヤが第1連結軸に対して固定されている上部非円形プーリの外周に巻張された後に上部非円形プーリに対して固定されており、
前記第1連結軸に対して固定されている上部非円形プーリは、肘掛部材の水平軸に対する傾きに係らず、第2のバネ機構を含む肘掛部材の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするバネ力を第2のバネ機構に発生せしめる形状とされており、第1連結軸と第3連結軸が連結手段を介して連結されていて、一方の連結軸の回動と同じ回動が他方の連結軸に伝達される。
請求項4の発明によれば、第2のバネ機構のバネは肘掛部材に取り付けられ、バネの端部から延伸されたワイヤが第2連結軸に対して固定されている円形プーリ、第4連結軸に対して固定されている円形プーリを経由して第3連結軸に対して固定されている第2の下部非円形プーリの外周に巻張されてから第2の下部非円形プーリに対して固定されている。
請求項5の発明によれば、第1のバネ機構と第2のバネ機構は、バネ力を調整可能である。
請求項6の発明によれば、第3連結軸部材まわりの回転に対してトルクを与えることで手先部に前後方向の力覚を与える駆動手段と、
ベース連結部材の第3連結軸まわりの回転に対してトルクを与えることで手先部に上下方向の力覚を与える駆動手段と、
ベース部材の垂直軸部材まわりの回転に対してトルクを与えることで手先部に左右方向の力覚を与える駆動手段と備える。
請求項7の発明によれば、垂直軸部材が、折りたたみ椅子の後脚とされる。
【発明の効果】
【0014】
本発明の肘掛型遠隔操縦装置は手首を含む肘を載置したまま遠隔操縦でき、かつ、肘の位置に応じて保持力が生成されるので長時間使用しても疲れない。
特に請求項7のようにすれば持ち運び、設置が容易であり、どのようなところでも遠隔操縦をおこなうことができる。
【図面の簡単な説明】
【0015】
【図1】折りたたみ椅子に取り付けられている本発明の第1の実施形態の肘掛型操縦装置が椅子に腰掛けたオペレータにより操縦されている様子を示す図である。
【図2】図1の肘掛型操縦装置を斜め後方から見た図である。
【図3】図1の肘掛型操縦装置の主要部の外観の拡大図である。
【図4】肘掛部材10、第1連結部材31、第2連結部材32の内部を示す図である。
【図5】肘掛部材10、第1連結部材31、第2連結部材32の内部を拡大して示す図である。
【図6】第1連結部材31、第2連結部材32、ベース部材100を下方から見た図である。
【図7】ベース部材100の下部の拡大図である。
【図8】ベース部材100の内部を示す図である。
【図9】肘掛部材10の前端を上に引き上げたときの肘掛部材10、第1連結部材31、第2連結部材32の内部を示す図である。
【図10】肘掛部材10の前端を下に押し下げたときの肘掛部材10、第1連結部材31、第2連結部材32の内部を示す図である。
【図11】図4(ニュートラル状態)、図8(肘掛部材10の前端を上に引き上げたとき)、図9(肘掛部材10の前端を下に押し下げたとき)の場合における上部非円形カム23と第2ワイヤ16と第1水平バネ12の状態を示す比較図である。
【図12】肘掛部材10を前方に押し出したときの肘掛部材10、第1連結部材31、第2連結部材32の内部を示す図である。
【図13】肘掛部材10を後方に引いたときの肘掛部材10、第1連結部材31、第2連結部材32の内部を示す図である。
【図14】第2の実施形態の肘掛型操縦装置の構成を示す図である。
【発明を実施するための形態】
【0016】
以下、添付の図面を参照して本発明の実施形態を説明する。まず、第1の実施形態について説明意する。
図1は椅子に取り付けられている本発明の第1の実施形態の肘掛型操縦装置が椅子に腰掛けたオペレータにより操縦されている様子を示す図である。図2は椅子に取り付けられている肘掛型操縦装置を斜め後方から見た図である。図3は本発明の肘掛型操縦装置の主要部の外観の拡大図であり、図4は主要部の内部を示す図である。図5は肘掛部材10、第1連結部材31を取り除いて示す図である。
肘掛部材10に第1連結部材31と第2連結部材32が、それぞれ第1連結軸21と第2結軸22を介して、連結されている。第1連結部材31と第2連結部材32はそれぞれ第3連結軸41と第4連結軸42を介してベース連結部材40に連結されている。
【0017】
第1連結軸21と第2連結軸22との間の軸間距離X1と第3連結軸41と第4連結軸42との間の軸間距離X2は等しく、第1連結軸21と第3連結軸41との間の軸間距離Y1は第1連結軸21と第4連結軸42との間の軸間距離Y2は等しくされており、第1連結軸21と第2結軸22と第3連結軸41と第4連結軸42を連節点とする変形可能な平行四辺形が形成されている。参照符号100で示されるのはベース部材である。
【0018】
図4、5に示されるように肘掛部材10の内部には、水平バネ取り付け部材11が取り付けられており、水平バネ取り付け部材11には第1水平バネ12と第2水平バネ13が取り付けられている。第2ワイヤ16が第1水平バネ12と第2水平バネ13の内部を通って配置され、第1水平バネ12と第2水平バネ13の水平バネ取り付け部材11とは反対側の端部において、それぞれ第1水平バネストッパ14と第2水平バネストッパ15が第2ワイヤ16に取り付けられている。
【0019】
第1連結部材31の内部には、垂直バネ取り付け部材35が取り付けられており、垂直バネ取り付け部材35には第1垂直バネ33と第2垂直バネ34が取り付けられている。第1ワイヤ38が第1垂直バネ33と第2垂直バネ34の内部を通って配置され、第1垂直バネ33と第2垂直バネ34の垂直バネ取り付け部材35とは反対側の端部において、それぞれ第1垂直バネストッパ36と第2垂直バネストッパ37が第1ワイヤ38に取り付けられている。
【0020】
第1連結軸21には上部非円形プーリ23と上部円形プーリ24が固定されており、第2ワイヤ16は上部非円形プーリ23に巻張され、かつ、1点において上部非円形プーリ23に固定されている。第3連結軸41には下部非円形プーリ43と下部円形プーリ44が固定されており、第2ワイヤ16は上部非円形プーリ23に巻張され、かつ、1点において下部非円形プーリ43に固定されている。
上部円形プーリ24と下部円形プーリ44は第3ワイヤ45で連動回転するように連結されている。
【0021】
第1連結部材31の内部には、第1モータ取り付け部材39が取り付けられており、第1モータ取り付け部材39には第1モータ51が固定されている。第1モータ51の軸には第2傘歯車47が取り付けられており、第2傘歯車47は第3連結軸41に取り付けられている第1傘歯車46と噛合っている。
【0022】
第1連結部材31と同様に第2連結部材32の内部には第2モータ52が第2モータ取り付け部材55に取り付けられており、第2モータ52の軸に取り付けられた第4傘歯車54が第4連結軸42に取り付けられた第3傘歯車53と噛合している。
【0023】
図6は第1連結部材31、第2連結部材32、ベース部材100を下方から見た図であるが、この図6において、参照符号101で示されるのはベース部材100の内部に固定される第3モータ取り付け部材であって、第3モータ取り付け部材101には図8において参照符号58でしめされている第3モータが取り付けられている。
また、参照符号102で示されるのは第3連結軸41をベース部材100の内部に固定する固定部材である。
【0024】
図7はベース部材100の下部の拡大図であるが、この図7に示されるように、ベース部材100の外側にベース部材100を参照符号2で示される椅子の後脚に取り付けるための第1装着部材104、第2装着部材105が固定されている。第1装着部材104、第2装着部材105は椅子の脚部1に対しては回動可能である。
図8はベース部材100の内部を示す図であって、第3モータ取り付け部材101に取り付けられた第3モータ58が示されている。
【0025】
以下、上記のように構成された肘掛型操縦装置の作動について説明する。
図4はニュートラルな状態で、オペレータが肘掛部材10を上下、前後、左右のいずれにも動かしていない状態を示しているが、図9はオペレータが肘掛部材10の前端を上方に移動せしめたときの状態を示し、図10はオペレータが肘掛部材10の前端を下方に移動せしめたときの状態を示し、図11はオペレータが肘掛部材10を前方に移動せしめたときの状態を示し、図12はオペレータが肘掛部材10を後方に移動せしめたときの状態を示している。
【0026】
図9に示す状態では、肘掛部材10は前端が上方に傾斜し第1水平バネ12が伸び、第2水平バネ13が縮み、第1垂直バネ33と第2垂直バネ34はニュートラルな状態と同じ長さを保っている。肘掛部材10の水平軸に対する傾斜角をθ1とするとθ1はベース連結部材40の水平軸に対する傾斜角に等しく、この傾斜角θ1は第2連結部材32内に配設されている第2モータ52に隣接して配設されている図示しない角度検出部材によって検出される。
【0027】
すなわち、ベース連結部材40に第4連結軸42が固定されており、第2連結部材32が回動すると第4連結軸42が公転回転するのでそれにより第3傘歯車53が回転してそれに噛合している第4傘歯車54が回転し、第4傘歯車54が取り付けられている第2モータ52の軸が回転し、その第2モータ52の軸に取り付けられているギヤ56に噛合しているギヤ57が回転し、このギヤ57が取り付けられている軸の回転の角度が第2モータ取り付け部材55の裏側の図示されない角度検出部材によって検出されるのである(図6参照)。この角度検出部材が特許請求の範囲の記載における第2角度検出手段に相当する。
【0028】
図10に示す状態では、肘掛部材10は前端が下方に傾斜し第1水平バネ12が縮み、第2水平バネ13が伸び、第1垂直バネ33と第2垂直バネ34はニュートラルな状態と同じ長さを保っている。肘掛部材10の水平軸に対する傾斜角θ1は図8の場合とは逆に水平軸より下方に向かうが上述の図示されない角度検出部材によって同様に検出される。
【0029】
上記の図4、図9、図10に示される状態における第1水平バネ12、第2水平バネ13の作用について図11を参照して説明する。
図11において、第1水平バネ12が上部非円形プーリ23の真横に記載されているのが図4に示される状態であり、第1水平バネ12が上部非円形プーリ23の斜め上方に記載されているのが図10に示される状態であり、第1水平バネ12が上部非円形プーリ23の斜め下方に記載されているのが図11に示される状態である。
【0030】
上部非円形プーリ23上に仮想基準点Aを仮定する。また、図4、図9、図10に示される状態における第1バネストッパ14の位置をそれぞれWH,WM,WLと仮定し、図4、図9、図10に示される状態におけるワイヤ16が上部非円形プーリ23から離れる点をそれぞれSH,SM,SLと仮定する。そして、図4、図9、図10に示される状態における上部非円形プーリ23の中心から離れる点上部非円形プーリ23から離れる点SH,SM,SLとから垂直バネ取り付け部材11の外側面までの距離をLH,LM、LLとする。
【0031】
AからWHまでの距離=AからWMまでの距離=AからWLまでの距離であり、
AからSHまでの距離<AからSMまでの距離<AからSLまでの距離であり、
LH>LM>LLである。
したがって、図4、図9、図10に示される状態における第1水平バネ12の長さをそれぞれBH,BM,BLとすれば、BH>BM>BLである。
【0032】
したがって、図4、図9、図10に示される状態における第1水平バネ12のバネ力をFH,FM,FLとすると、このバネは圧縮されると伸びようとする力を発生するものであり、縮められて短くされるほど大きい力を発生するものであるのでFH<FM<FLとなる。
そして、このバネ力は垂直バネ取り付け部材11を上部非円形プーリ23側に押しやろうとする力である。
一方、図4、図9、図10に示される状態における上部非円形プーリ23の中心から離れる点上部非円形プーリ23から離れる点SH,SM,SLまでの距離をRH,RM、RLとすると、RH>RM>RLである。
【0033】
図4、図9、図10に示される状態においては、それぞれ、第1連結軸21には、FH×RH、FM×RM、FL×RLの反時計回りのトルクがかかる。
ここで、上述のようにFH<FM<FLであり、RH>RM>RLである。
したがって、FH×RH、FM×RM、FL×RLの値を一定にすることができる。
すなわち、FH×RH、FM×RM、FL×RLの値が一定になるように上部非円形プーリ23のプーリの外周形状が決められている。
その際、オペレータの肘(手首を含む)の重量と肘掛部材10の重量(内部の機構の重量を含む)を補償できる、すなわち上記重量を感じさせない、ようにバネが設定される。
【0034】
図12、図13に示されるように肘掛部材10が前方、あるいは、後方に移動せしめられ第1水平バネ12、第2水平バネ13が伸縮しない状態では、第1垂直バネ33、第2垂直バネ34が上述の第1水平バネ12、第2水平バネ13と同様な動きと作用をおこなう。
そして、第1連結部材31の垂直軸線からの傾斜θ2は第1連結部材31内に配設されている第1モータ51に付設されている図示しない角度検出部材によって検出される。
【0035】
すなわち、ベース連結部材40に第3連結軸41が固定されており、第1連結部材31が回動すると第3連結軸41が公転回転するのでそれにより第1傘歯車46が回転してそれに噛合している第2傘歯車47が回転し、第2傘歯車47が取り付けられている第1モータ51の軸が回転し、その第1モータ51の軸に取り付けられているギヤ48に噛合しているギヤ49が回転し、このギヤ49が取り付けられている軸の回転の角度が第1モータ取り付け部材39の裏側の図示されない角度検出部材によって検出されるのである(図6参照)。この角度検出部材が特許請求の範囲の記載における第1角度検出手段に相当する。
【0036】
肘掛部材10およびが上または下に傾斜せしめられ、第1連結部材31(および第2連結部材32)も前方または後方に移動せしめることも可能である。前述のように、上部円形プーリ24と下部円形プーリ44は第3ワイヤ45で連動回転するように連結されているので、例えば、肘掛部材10およびが上に傾斜せしめられ、第1連結部材31(および第2連結部材32)が前方に移動せしめられた場合には、上部非円形プーリ23、下部非円形プーリ43は、図9に示した場合よりも、時計回り方向に回転しており、その結果、バネ力はより小さくなる。
【0037】
次に、垂直軸線まわりの回動の角度θ3の検出について説明する。
図8において、参照符号111で示されるのは図示しない第3モータの軸に取り付けられている歯車であり、歯車111は半円形のセクター歯車112と噛合している。セクター歯車112は脚部1に対して固定される第1位置決め部材106に固定されている。一方、第2装着部材105の上側には同様に脚部1に対して固定される第2位置決め部材107が配置される。
【0038】
第1位置決め部材106と第2位置決め部材107でベース部材100に取り付けられている第1装着部材104と第2装着部材105を上下方向から挟むようにして全体の取り付け高さが決められるが、前述のように第1装着部材104、第2装着部材105は椅子の脚部1に対して固定されていないのでベース部材100を介して全体が脚部1の周りを回動することができる。
【0039】
図7に示されるように、第3モータの軸にはセクター歯車112と噛合する歯車111の他に歯車113が取り付けられており、この歯車113はより小径の歯車114と噛合している。そしてこの歯車114の取り付けられている軸の回転の角度が垂直軸線まわりの回動の角度θ3として第3モータ取り付け部材101の裏側の図示されない角度検出部材によって検出されるのである。この角度検出部材が特許請求の範囲の記載における第3角度検出手段に相当する。
【0040】
次に、図14を参照して、第2の実施形態について説明する。
第2の実施形態は第1の実施形態と同様な、肘掛部材10、ベース連結部材40、第1連結部材31、第2連結部材32を含み、第1連結軸21と第2連結軸22と第3連結軸41と第4連結軸42を連節点とする変形可能な平行四辺形を形成している。
【0041】
そして、第1の実施形態とは異なり、第1連結軸21に上部円形プーリ24が取り付けられておらず、第3連結軸に下部円形プーリ44が取り付けられておらず、その代わりに、第2連結軸22に上部円形プーリ25が、第4連結軸42には下部円形プーリ25が取り付けられている。そして、第3連結軸41には第1の実施形態の下部非円形プーリ43に加えて、同様な第2下部非円形プーリ27が取り付けられている。第2下部非円形プーリ27は図中下左部分で半径変化による効果を発揮するようにされている。
【0042】
水平バネ取り付け部材11には、第1の実施形態と同様に、第1水平バネ12と第2水平バネ13が取り付けられている。第1の実施形態の第2ワイヤ16よりも長い第1ロングワイヤ61が第1水平バネストッパ14のところを始点として図中反時計回りに上部円形プーリ25と下部円形プーリ26に部分周接してから第2下部非円形プーリ27に達しその第2下部非円形プーリ27の半径変化による効果を発揮しない部分、例えば、図中右中間部分、に固定されている。
【0043】
一方、第2ロングワイヤ62が第2水平バネストッパ15のところを始点として上部円形プーリ25に第1ロングワイヤ61とは反対に時計周りに部分周接し、下部円形プーリ26にも時計周りに部分周接してから第2下部非円形プーリ27に達しその第2下部非円形プーリ27の半径変化による効果を発揮しない部分、例えば、図中右中間部分、に固定されている。
【0044】
上述のように、上部円形プーリ25と下部円形プーリ26は第1ロングワイヤ61と第2ロングワイヤ62が周接するのでそれぞれ2個づつ形成されている。なお、ニュートラル状態から変移せしめられたときに第1ロングワイヤ61と第2ロングワイヤ62は、上部円形プーリ25、下部円形プーリ26、および、第2下部非円形プーリ27を互いに逆方向に回転せしめようとする。
【0045】
この第2の実施形態においては、第1連結軸21に上部円形プーリ24が取り付けられておらず、第3連結軸に下部円形プーリ44が取り付けられておらず、もちろん、第3ワイヤ45もない。したがって、第1連結部材31の内部に構成部品が集中的に配置されることが防止され、組み立てが容易になるという利点がある。
【0046】
前述した第1モータ51、第2モータ52、および、第3モータ58に付設された角度検出センサの検出した信号によって肘掛部材の位置、姿勢を含む状態を特定することができる。この信号は、図示しない、適切な、有線または無線の伝達手段によりロボット等の操縦対象に伝達され、伝達された信号にもとづきロボット等の操縦対象の対応する部位が動いて所望の操作が行われる。
ここで、ロボット等の操縦対象が何らかの対象物に接触し反力を受けるとその反力はロボット等にあらかじめ備えられたセンサにより検出され、その信号が本発明の遠隔操縦装置に伝達される。
【0047】
すると、伝達された信号にもとづいて第1モータ51、第2モータ52、および、第3モータ58が作動せしめられてオペレータに力覚が与えられるが、その際に力覚が目標値になるようにモータにはその力に相当する電流が供給される。なお、力覚はあらかじめ定めた倍力比によりロボットが検出した力に対して倍力されるが、倍力比は1より小さい場合もあれば、1より大きい場合もある。
上記のような信号の送受、倍力比の設定、および、前述したロール角の検出値の補正等のためにベース部材100内に、図示しないが制御装置が設けられている。
【産業上の利用可能性】
【0048】
本発明はロボットや仮想現実下の操縦対象を遠隔操縦するための遠隔操縦装置であり、遠隔操縦をおこなうロボットや仮想現実を利用するアミューズメント装置等に広く適用できる。
特にはレスキュー隊等が屋外で使用するロボットを遠隔操縦する場合に適している。
【符号の説明】
【0049】
1 椅子
2 後脚
10 肘掛部材
11 水平バネ取り付け部材
12 第1水平バネ
13 第2水平バネ
16 第2ワイヤ
17 グリップ
21 第1連結軸
22 第2連結軸
23 上部非円形プーリ
24 上部円形プーリ
25 上部円形プーリ
26 下部円形プーリ
27 第2下部非円形プーリ
31 第1連結部材
32 第2連結部材
33 第1垂直バネ
34 第2垂直バネ
35 垂直バネ取り付け部材
38 第1ワイヤ
40 ベース連結部材
41 第3連結軸
42 第4連結軸
43 下部非円形プーリ
44 下部円形プーリ
45 第3ワイヤ
51 第1モータ
52 第2モータ
58 第3モータ
100 ベース部材
112 セクター歯車
【特許請求の範囲】
【請求項1】
肘掛型遠隔操縦装置であって、
オペレータの手首を含む肘を載せるための肘掛部材であって、第1連結軸を介して第1連結部材の上端が回動自在に取り付けられ、第2連結軸を介して第2連結部材の上端が回動自在に取り付けられている肘掛部材と、
ベース連結部材であって、第1連結部材の下端が第3連結軸を介して回動自在に連結され、第2連結部材の下端が第4連結軸を介して回動自在に連結されている、ベース連結部材と、
第3連結軸が固定されたベース部材であって、地面に立設される垂直軸部材に回動自在に取り付けられるベース部材と、を具備し、
第1連結軸と第2連結軸の距離と第3連結軸と第4連結軸との距離が等しく、第1連結軸と第3連結軸の距離と第2連結軸と第4連結軸の距離が等しくされ、肘掛部材、第1連結部材、第2連結部材、ベース連結部材が平行四辺形をなしており、
第1連結部材の第3連結軸周りの回転角度を検出可能な第1角度検出手段と、ベース連結部材の第3連結軸まわりの回転角度を検出可能な第2角度検出手段と、ベース部材の垂直軸部材まわりの角度を検出可能な第3角度検出手段と、を備えて、肘掛部材の状態を検出し、かつ、
第1連結部材の基準角度からの傾斜角に応じて第3連結軸周りの復元力を生成する第1のバネ機構と、ベース連結部材に平行な肘掛部材の基準角度からの傾斜角に応じて第1連結軸周りの復元力を生成する第2のバネ機構と、を備えて、肘掛部材の状態に応じた復元力を提供する、
ことを特徴とする肘掛型遠隔操縦装置。
【請求項2】
第1のバネ機構のバネは第1連結部材に取り付けられ、バネの端部から延伸されたワイヤが第3連結軸に対して固定されている下部非円形プーリの外周に巻張された後に下部非円形プーリに対して固定されており、
前記第3連結軸に対して固定されている下部非円形プーリは、第1連結部材の垂直軸に対する傾きに係らず、肘掛部全体の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするバネ力を第1のバネ機構に発生せしめる形状とされている、
ことを特徴とする請求項1に記載の肘掛型遠隔操縦装置。
【請求項3】
第2のバネ機構のバネは肘掛部材に取り付けられ、バネの端部から延伸されたワイヤが第1連結軸に対して固定されている上部非円形プーリの外周に巻張された後に上部非円形プーリに対して固定されており、
前記第1連結軸に対して固定されている上部非円形プーリは、肘掛部材の水平軸に対する傾きに係らず、第2のバネ機構を含む肘掛部材の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするバネ力を第2のバネ機構に発生せしめる形状とされており、第1連結軸と第3連結軸が連結手段を介して連結されていて、一方の連結軸の回動と同じ回動が他方の連結軸に伝達される、ことを特徴とする請求項1または2に記載の肘掛型遠隔操縦装置。
【請求項4】
第2のバネ機構のバネは肘掛部材に取り付けられ、バネの端部から延伸されたワイヤが第2連結軸に対して固定されている円形プーリ、第4連結軸に対して固定されている円形プーリを経由して第3連結軸に対して固定されている第2の下部非円形プーリの外周に巻張されてから第2の下部非円形プーリに対して固定されている、ことを特徴とする請求項1から3のいずれか一項に記載の肘掛型遠隔操縦装置。
【請求項5】
第1のバネ機構と第2のバネ機構は、バネ力を調整可能である、ことを特徴とする請求項1から4のいずれか一項に記載の肘掛型遠隔操縦装置。
【請求項6】
第1連結部材の第3連結軸まわりの回転に対してトルクを与えることで手先部に前後方向の力覚を与える駆動手段と、
ベース連結部材の第3連結軸まわりの回転に対してトルクを与えることで、手先部に上下方向の力覚を与える駆動手段と、
ベース部材の垂直軸部材まわりの回転に対してトルクを与えることで肘に左右方向の力覚を与える駆動手段と、を備え、
肘掛部材の状態に応じて力覚を与えることが可能である、
ことを特徴とする請求項1から5のいずれか一項に記載の肘掛型遠隔操縦装置。
【請求項7】
垂直軸部材が、折りたたみ椅子の後脚である、ことを特徴とする請求項1から6のいずれか一項に記載の肘掛型遠隔操縦装置。
【請求項1】
肘掛型遠隔操縦装置であって、
オペレータの手首を含む肘を載せるための肘掛部材であって、第1連結軸を介して第1連結部材の上端が回動自在に取り付けられ、第2連結軸を介して第2連結部材の上端が回動自在に取り付けられている肘掛部材と、
ベース連結部材であって、第1連結部材の下端が第3連結軸を介して回動自在に連結され、第2連結部材の下端が第4連結軸を介して回動自在に連結されている、ベース連結部材と、
第3連結軸が固定されたベース部材であって、地面に立設される垂直軸部材に回動自在に取り付けられるベース部材と、を具備し、
第1連結軸と第2連結軸の距離と第3連結軸と第4連結軸との距離が等しく、第1連結軸と第3連結軸の距離と第2連結軸と第4連結軸の距離が等しくされ、肘掛部材、第1連結部材、第2連結部材、ベース連結部材が平行四辺形をなしており、
第1連結部材の第3連結軸周りの回転角度を検出可能な第1角度検出手段と、ベース連結部材の第3連結軸まわりの回転角度を検出可能な第2角度検出手段と、ベース部材の垂直軸部材まわりの角度を検出可能な第3角度検出手段と、を備えて、肘掛部材の状態を検出し、かつ、
第1連結部材の基準角度からの傾斜角に応じて第3連結軸周りの復元力を生成する第1のバネ機構と、ベース連結部材に平行な肘掛部材の基準角度からの傾斜角に応じて第1連結軸周りの復元力を生成する第2のバネ機構と、を備えて、肘掛部材の状態に応じた復元力を提供する、
ことを特徴とする肘掛型遠隔操縦装置。
【請求項2】
第1のバネ機構のバネは第1連結部材に取り付けられ、バネの端部から延伸されたワイヤが第3連結軸に対して固定されている下部非円形プーリの外周に巻張された後に下部非円形プーリに対して固定されており、
前記第3連結軸に対して固定されている下部非円形プーリは、第1連結部材の垂直軸に対する傾きに係らず、肘掛部全体の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするバネ力を第1のバネ機構に発生せしめる形状とされている、
ことを特徴とする請求項1に記載の肘掛型遠隔操縦装置。
【請求項3】
第2のバネ機構のバネは肘掛部材に取り付けられ、バネの端部から延伸されたワイヤが第1連結軸に対して固定されている上部非円形プーリの外周に巻張された後に上部非円形プーリに対して固定されており、
前記第1連結軸に対して固定されている上部非円形プーリは、肘掛部材の水平軸に対する傾きに係らず、第2のバネ機構を含む肘掛部材の重量と肘掛部材に載置されたオペレータの手首を含む肘の重量とバランスするバネ力を第2のバネ機構に発生せしめる形状とされており、第1連結軸と第3連結軸が連結手段を介して連結されていて、一方の連結軸の回動と同じ回動が他方の連結軸に伝達される、ことを特徴とする請求項1または2に記載の肘掛型遠隔操縦装置。
【請求項4】
第2のバネ機構のバネは肘掛部材に取り付けられ、バネの端部から延伸されたワイヤが第2連結軸に対して固定されている円形プーリ、第4連結軸に対して固定されている円形プーリを経由して第3連結軸に対して固定されている第2の下部非円形プーリの外周に巻張されてから第2の下部非円形プーリに対して固定されている、ことを特徴とする請求項1から3のいずれか一項に記載の肘掛型遠隔操縦装置。
【請求項5】
第1のバネ機構と第2のバネ機構は、バネ力を調整可能である、ことを特徴とする請求項1から4のいずれか一項に記載の肘掛型遠隔操縦装置。
【請求項6】
第1連結部材の第3連結軸まわりの回転に対してトルクを与えることで手先部に前後方向の力覚を与える駆動手段と、
ベース連結部材の第3連結軸まわりの回転に対してトルクを与えることで、手先部に上下方向の力覚を与える駆動手段と、
ベース部材の垂直軸部材まわりの回転に対してトルクを与えることで肘に左右方向の力覚を与える駆動手段と、を備え、
肘掛部材の状態に応じて力覚を与えることが可能である、
ことを特徴とする請求項1から5のいずれか一項に記載の肘掛型遠隔操縦装置。
【請求項7】
垂直軸部材が、折りたたみ椅子の後脚である、ことを特徴とする請求項1から6のいずれか一項に記載の肘掛型遠隔操縦装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−88852(P2013−88852A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−225780(P2011−225780)
【出願日】平成23年10月13日(2011.10.13)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 第29回日本ロボット学会学術講演会 講演概要集(発行所:一般社団法人日本ロボット学会 発行日:平成23年9月7日)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月13日(2011.10.13)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 第29回日本ロボット学会学術講演会 講演概要集(発行所:一般社団法人日本ロボット学会 発行日:平成23年9月7日)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]