
胸骨稜軟骨部位の分離方法及び装置
【課題】人手で行なわれている胸骨稜からの胸骨稜軟骨部位(ヤゲン)の分離作業を機械により自動化して、作業効率を飛躍的に高める。
【解決手段】ワーク投入部Aでワーク位置決めガイド20の上面(水平基準面h)に胸骨稜130を当て、ワークwを基準高さに保持しながらヤゲンカット部Bに搬送する。ヤゲンカット部Bで、第1切断刃24でヤゲン132を水平方向に切断する。次に第2切断刃26をヤゲン132の内側に突き刺し、ヤゲン132と内側枝骨144間に付着する膜146を上下方向に切断する。その際第2切断刃26と第2切断刃26の外側に配置された押えバー30とでヤゲン132を挟み、膜146を完全に切断するまでヤゲン132を第2切断刃26の外側に保持する。これによって、ヤゲン132をワーク本体から完全に分離できる。
【解決手段】ワーク投入部Aでワーク位置決めガイド20の上面(水平基準面h)に胸骨稜130を当て、ワークwを基準高さに保持しながらヤゲンカット部Bに搬送する。ヤゲンカット部Bで、第1切断刃24でヤゲン132を水平方向に切断する。次に第2切断刃26をヤゲン132の内側に突き刺し、ヤゲン132と内側枝骨144間に付着する膜146を上下方向に切断する。その際第2切断刃26と第2切断刃26の外側に配置された押えバー30とでヤゲン132を挟み、膜146を完全に切断するまでヤゲン132を第2切断刃26の外側に保持する。これによって、ヤゲン132をワーク本体から完全に分離できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鶏、かも、あひる等の食鳥屠体から脚部、手羽付き胸肉及びササミ等を分離した後の、通称「ガラ」と称される首部付き屠体から胸骨稜軟骨部位を分離する自動化された方法及び装置に関する。
【背景技術】
【0002】
本出願人は、長年食鳥屠体の自動脱骨技術の開発を手がけてきた。この開発過程で、例えば、内蔵を除去された中抜き屠体の脚部及び背中の一部を含む下半身と、首部、手羽、肋骨を含む胸部及び背中の一部を含む上半身とに分割する自動脱骨技術を完成させている(特許文献1)。また、もも部位の自動脱骨技術を完成すると共に(特許文献2)、上半身から手羽付き胸肉及びササミを分離する自動脱骨技術を完成させている(特許文献3)。
【0003】
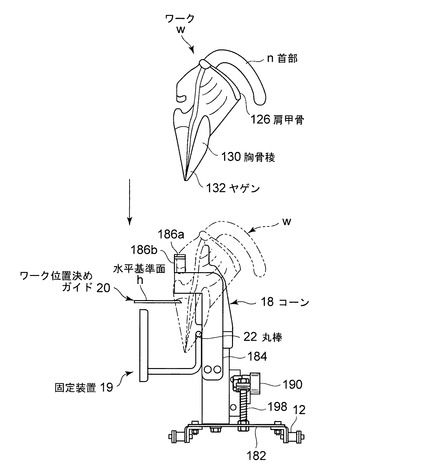
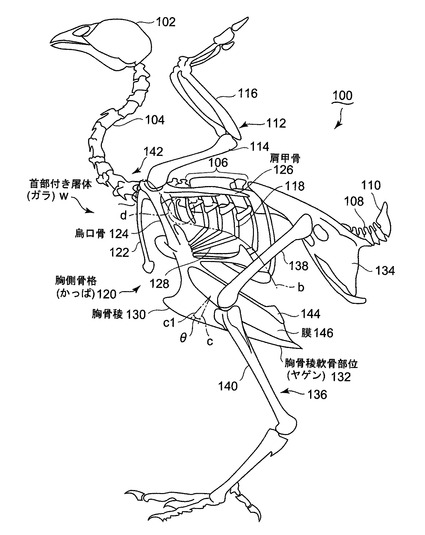
図11に鶏の骨格を示す。鶏の骨格100は、頭蓋102から頚椎104、胸椎106を経て、尾椎108及び尾端骨110に至るまで背骨に相当する骨が繋がっている。手羽112は上腕骨114及び尺骨116等で構成されている。肩部には、手羽112と共に、鎖骨122、烏口骨124及び肩甲骨126が接続されている。肋骨118に胸骨128が接続され、胸骨128の下部に剣形状の胸骨稜130が存在し、胸骨稜130の下部に胸骨稜軟骨部位132が存在する。脚部136は、坐骨134に接続された大腿骨138及び大腿骨138に接続された脛骨140等からなる。なお、食鳥屠体において、胸骨稜130と胸骨稜130に隣接した内側枝骨144との間は、膜146で覆われている。
【0004】
食鳥屠体の自動脱骨工程は、まず、特許文献1に開示された自動脱骨装置により、内蔵を除去された食鳥屠体の上半身から脚部136及び坐骨134とが分割される。次に、特許文献3に開示された自動脱骨装置により、上半身から手羽付き胸肉及びササミが分離される。手羽付き胸肉及びササミが分離された首部付き屠体wは、通称「ガラ」と称される。首部付き屠体wは、人手によって、図11に示す切断ラインbで切断され、首部付き屠体本体142と、通称「かっぱ」と称される胸側骨格120と切断分離される。なお、鎖骨122、烏口骨124及び肩甲骨126は、胸側骨格120に付随する。
【0005】
分離された首部付き屠体本体142及び胸側骨格120は、まだ肉が付着しているので、付着している肉を人手で分離して食用に利用すると共に、残った骨格は鶏がらスープ等に利用される。胸骨稜軟骨部位132は、通称「ヤゲン」と称され、人手により切断ラインcで胸骨稜130と切断され、焼き鳥として賞味されたり、あるいは変形性関節症やリューマチに効用があると言われるグルコサミン等の原料として利用されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−223694号公報
【特許文献2】特開2002−10732号公報
【特許文献3】特開2008−307064号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
首部付き屠体(ガラ)wを首部付き屠体本体142と胸側骨格(かっぱ)120とに分離する作業、及び胸骨稜130から胸骨稜軟骨部位(ヤゲン)132を分離する作業は、まだ手作業で行なわれており、機械化による自動化はなされていない。そのため、これらの作業に多くの人手と時間を要している。
【0008】
本発明は、かかる従来技術の課題に鑑み、人手で行なわれている胸骨稜からの胸骨稜軟骨部位(ヤゲン)の分離作業を機械により自動化して、作業効率を飛躍的に高めることを目的とする。
【課題を解決するための手段】
【0009】
かかる目的を達成するため、本発明の胸骨稜軟骨部位の分離方法は、食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体をコーンに嵌挿し、胸骨稜を基準位置に設定された基準面に当てて固定する屠体投入工程と、首部付き屠体の胸骨稜を前記基準面によって設定される基準位置に保持した状態で、コーンを搬送させる搬送工程と、コーンの搬送路に面して固定された第1切断刃で、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断工程と、第1切断工程後、コーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定された第2切断刃を搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断工程と、第2切断刃と第2切断刃の外側に並設された押えバーとで胸骨稜軟骨部位を挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して前記膜を切断する膜分離工程と、からなるものである。
【0010】
本発明方法では、首部付き屠体をコーンに嵌挿し、胸骨稜を基準位置に設定された基準面に当てて固定する。そして、搬送工程では、該基準面に胸骨稜を当て、胸骨稜を基準位置に維持しながら搬送する。これによって、コーンの搬送路に設けられた後工程の切断領域で、切断刃に対する胸骨稜の相対位置を所望位置に位置決めできる。次に、コーンを搬送し、該切断領域で胸骨稜軟骨部位を切断分離する。該基準位置に対して切断領域に設けられた切断刃の高さを調整することで、胸骨稜軟骨部位の切断部位を調整できる。
【0011】
第1切断工程では、基準面に平行に固定された第1切断刃で、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する。第2切断工程では、胸骨稜軟骨部位の軸方向に向けて固定された第2切断刃で、胸骨稜軟骨部位と胸骨稜軟骨部位に隣接する内側枝骨144(図11参照)間に付着する膜146を切断する。その間、第2切断刃と第2切断刃の外側に並設された押えバーとで胸骨稜軟骨部位を挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持する。
【0012】
第2切断刃は、胸骨稜軟骨部位の軸方向に向けて固定されているので、胸骨稜軟骨部位を傷付けずに膜を切断できる。また、第2切断刃で膜を完全に切断する間、胸骨稜軟骨部位が膜に引っ張られずに第2切断刃の外側位置に保持できるので、胸骨稜軟骨部位を首部付き屠体から完全に引き離すことができる。本発明方法によって、胸骨稜軟骨部位の分離を機械で自動化できるので、これに要する人員を大幅に軽減できると共に、作業時間を大幅に短縮できる。
【0013】
本発明方法において、屠体投入工程及び搬送工程において、前記基準面が基準高さに設定された水平基準面であり、首部付き屠体の胸骨稜を基準高さに保持した状態でコーンを搬送させ、第1切断工程で第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させると共に、第2切断工程で第2切断刃を垂直に配置するとよい。基準面を水平基準面とすることで、首部付き屠体の基準面への設置(位置決め)と搬送、及び第1・第2切断刃の基準面に対する配置が容易になる。また、第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させることで、胸骨稜軟骨部位の境界線に沿った切断が可能となり、胸骨稜軟骨部位の容積を大きく取ることができる。
【0014】
また、第1切断工程において、第1切断刃の刃部がコーンの搬送方向に対して鈍角をなすように配置され、第1切断刃で胸骨稜軟骨部位を胸骨稜の外側から内側に向けて切断するようにするとよい。これによって、胸骨稜軟骨部位に隣接する内側枝骨144を切断することなく、胸骨稜軟骨部位のみを切断できる。そのため、切断された胸骨稜軟骨部位から内側枝骨144を除去する作業を必要としない。
【0015】
また、第2切断工程において、第2切断刃がコーンの搬送方向下流側に向かって幅広となる楔形板状体をなし、首部付き屠体の搬送に従って、楔形板状体の傾斜辺に形成された刃部で膜146を切断するようにするとよい。これによって、首部付き屠体の搬送に伴って、自動的に膜を切断できる。
【0016】
本発明方法において、第2切断工程後、第2切断刃の搬送方向下流側に設けられた分離装置により、首部付き屠体から胸側骨格を分離する分離工程を行なうようにするとよい。これによって、首部付き屠体をひとつの搬送路を搬送させるだけで、胸骨稜軟骨部位の分離と、首部付き屠体からの胸側骨格の分離とを連続して一度に行なうことができる。そのため、これら2つの作業に要する時間を大幅に短縮できると共に、これら2つの作業を自動化できるので、作業人員を大幅に削減できる。
【0017】
また、前記本発明方法の実施に直接使用可能な本発明の胸骨稜軟骨部位の分離装置は、食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体を嵌挿固定する複数のコーンと、複数のコーンが取り付けられ、複数のコーンを等間隔で搬送する搬送装置と、首部付き屠体の胸骨稜を基準位置に設定された基準面に当てた状態でコーンに固定する固定装置と、コーンの搬送方向に沿って配置され、基準面を形成するフレームと、コーンの搬送路に面して固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断刃と、第1切断刃の下流側にコーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断刃と、第2切断刃の外側に並設され、胸骨稜軟骨部位を第2切断刃とで挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して膜を切断する押えバーと、を備えているものである。
【0018】
本発明装置では、先ず、首部付き屠体をコーンに嵌挿し、胸骨稜をフレームによって形成される基準面に当てて固定する。そして、コーンを基準面によって設定される基準位置に維持したまま搬送し、第1切断刃で胸骨稜軟骨部位を胸骨稜から切断する。これによって、胸骨稜軟骨部位の所望位置を確実に切断できる。次に、第2切断刃で首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する。この時、第2切断刃と押えバーとで胸骨稜軟骨部位を挟み、胸骨稜軟骨部位を膜に引っ張られずに第2切断刃の外側面に保持することで、胸骨稜軟骨部位を首部付き屠体から完全分離できる。また、第2切断刃は、胸骨稜軟骨部位の軸方向に向けて固定されているので、胸骨稜軟骨部位を傷付けずに膜を切断できる。
【0019】
本発明装置によれば、胸骨稜軟骨部位の分離工程を自動化できるので、人手作業と比べて、大幅に効率化できる。また、コーンを搬送させる搬送装置以外に、一切の駆動装置を必要としないので、動力を最小限に低減でき、かつ駆動装置を制御するための複雑な制御装置も必要としない。そのため、装置構成を簡単かつ低コスト化できる。
【0020】
本発明装置において、前記基準面が基準高さに設定された水平基準面であり、搬送装置によって首部付き屠体の胸骨稜を基準高さに保持した状態でコーンを搬送させ、第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させると共に、第2切断刃を垂直に配置するとよい。基準面を水平基準面とすることで、首部付き屠体の基準面への設置と搬送、及び第1・第2切断刃の配置が容易になる。また、第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させることで、胸骨稜軟骨部位の境界線にそって胸骨稜軟骨部位を切断でき、胸骨稜軟骨部位の容積を大きく取ることができる。
【0021】
本発明装置において、第2切断刃が、コーンの搬送方向下流側に向かって幅広となる楔形板状体をなし、首部付き屠体の移動に従って、楔形板状体の傾斜辺に形成された刃で膜を切断するように構成されているとよい。これによって、首部付き屠体の搬送に従って、第2切断刃で自動的に膜を切断できる。
【0022】
本発明装置において、第1切断刃及び第2切断刃が1個のカッターユニットに装着され、前記基準面に対するカッターユニットの相対位置を調整可能にするとよい。これによって、胸骨稜軟骨部位の切断位置を容易に調整できるようになる。
【0023】
本発明装置において、固定装置が、少なくとも一方がコーンに回動可能に装着され、コーンに嵌挿された首部付き屠体の胸骨稜を両側から挟む一対のアームと、回動可能なアームに連結されたカムと、該回動可能なアームを開方向へバネ力を付勢するバネと、コーンの搬送方向に沿って水平に配置され、回動可能なアームを開方向へカムを動作させるガイドレールと、を備えているとよい。このように、ガイドレールを設けることで、一対のアームを開閉動作させるための一切の駆動装置及び該駆動装置を制御する制御装置を必要としない。また、ガイドレールの配置領域を決定するだけで、一対のアームの開閉タイミングを所望のタイミングに合わせることができる。
【0024】
前記構成に加えて、一対のアームの挟み面がL字形状をなしているとよい。これによって、胸骨稜を含め首部付き屠体をコーンに安定して固定できる。そのため、胸骨稜を基準面に安定保持できるようになり、第1切断刃及び第2切断刃で胸骨稜軟骨部位を所望位置で確実に切断できる。
【0025】
本発明装置において、第2切断刃の下流側にコーンの搬送路に面して、首付き屠体から胸側骨格を分離する分離装置を配置するとよい。これによって、首部付き屠体からの胸骨稜軟骨部位及び胸側骨格の分離を、ひとつの搬送路で搬送させるだけで連続して行なうことができる。そのため、これら2つの作業に要する時間を大幅に短縮できると共に、これら2つの作業を自動化できるので、作業人員を大幅に削減できる。
【発明の効果】
【0026】
本発明方法によれば、食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体をコーンに嵌挿し、胸骨稜を基準位置に設定された基準面に当てて固定する屠体投入工程と、首部付き屠体の胸骨稜を前記基準面によって設定される基準位置に保持した状態で、コーンを搬送させる搬送工程と、コーンの搬送路に面して固定された第1切断刃で、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断工程と、第1切断工程後、コーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定された第2切断刃を搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断工程と、第2切断刃と第2切断刃の外側に並設された押えバーとで胸骨稜軟骨部位を挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して前記膜を切断する膜分離工程と、からなるので、胸骨稜軟骨部位及び胸骨稜軟骨部位に付着する膜を所望位置で正確に切断できる。また、胸骨稜軟骨部位の分離を機械により自動化でき、作業時間を大幅に短縮できると共に、これに要する人手を大幅に軽減できる。
【0027】
また、本発明装置によれば、食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体を嵌挿固定する複数のコーンと、複数のコーンが取り付けられ、複数のコーンを等間隔で搬送する搬送装置と、首部付き屠体の胸骨稜を基準位置に設定された基準面に当てた状態でコーンに固定する固定装置と、コーンの搬送方向に沿って配置され、基準面を形成するフレームと、コーンの搬送路に面して固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断刃と、第1切断刃の下流側にコーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断刃と、第2切断刃の外側に並設され、胸骨稜軟骨部位を第2切断刃とで挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して膜を切断する押えバーと、を備えているので、前記本発明方法と同様の作用効果を得ることができる。
【0028】
また、コーンを搬送させる搬送装置以外に、一切の駆動装置を必要としないので、動力を最小限に低減できる。さらに、駆動装置を制御するための複雑な制御装置も必要としないので、装置構成を簡単かつ低コスト化できる。
【図面の簡単な説明】
【0029】
【図1】本発明方法及び装置の一実施形態に係る自動化装置の全体正面図である。
【図2】前記分離装置のコーンの斜視図である。
【図3】前記分離装置のワーク投入部の正面図である。
【図4】前記分離装置のワーク固定装置の側面図である。
【図5】前記分離装置のヤゲンカット部の正面図である。
【図6】前記ヤゲンカット部の切断刃の正面図である。
【図7】前記ヤゲンカット部の側面図である。
【図8】前記分離装置のかっぱ分離部の正面図である。
【図9】(A)は装置背面側から視た前記かっぱ分離部の斜視図であり、(B)はコーンと第1丸棒先端部位との位置関係を示す斜視図である。
【図10】(A)は前記自動化装置で分離された首部付き屠体本体を示し、(B)はかっぱを示し、(C)はヤゲンを示す斜視図である。
【図11】鶏の骨格を示す側面図である。
【発明を実施するための形態】
【0030】
以下、本発明を図に示した実施形態を用いて詳細に説明する。但し、この実施形態に記載されている構成部品の寸法、材質、形状、その相対配置などは特に特定的な記載がない限り、この発明の範囲をそれのみに限定する趣旨ではない。
【0031】
本発明方法及び装置を鶏の胸骨稜軟骨部位及び胸側骨格の分離に適用した一実施形態を図1〜図10に基づいて説明する。本実施形態では、鶏の屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体を「ワーク」と言い、ワークから分離される胸側骨格を「かっぱ」と言い、胸側骨格に付随した胸骨稜の下部領域である胸骨稜軟骨部位を「ヤゲン」と言う。
【0032】
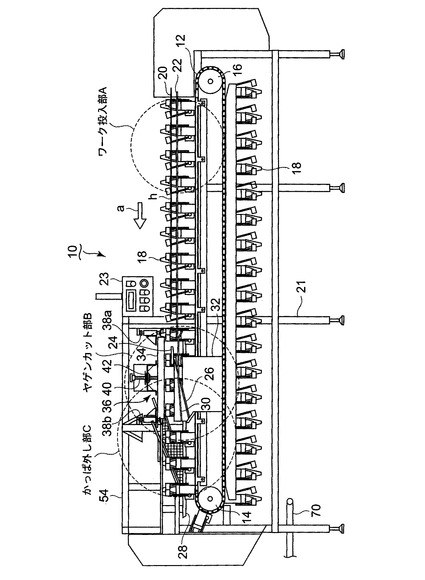
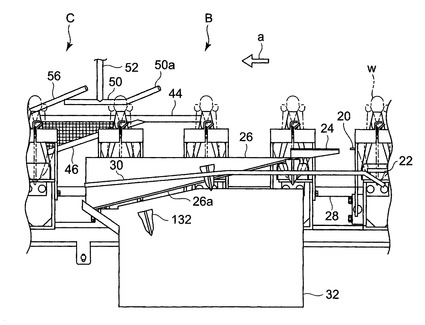
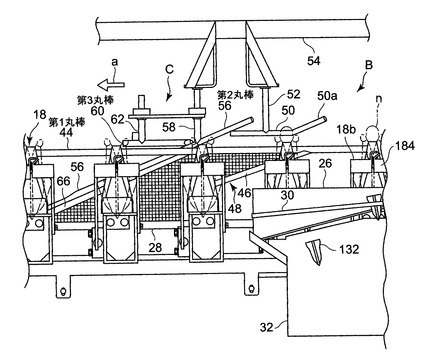
図1において、本実施形態の自動化装置10は、無端チェーン12が駆動スプロケット14及び従動スプロケット16間に巻回され、水平方向に配置されている。無端チェーン12は、駆動スプロケット14によって矢印a方向に移動する。無端チェーン12には等間隔で多数のコーン18が装着されている。コーン18は、ワーク投入部Aからヤゲンカット部B及びカッパ外し部Cに向う往路で正立しており、カッパ外し部Cからワーク投入部Aに戻る復路で、倒立した状態となる。中央の支柱21の上端に操作盤23が設けられている。駆動スプロケット14の下方にかっぱ排出コンベア70が設けられている。
【0033】
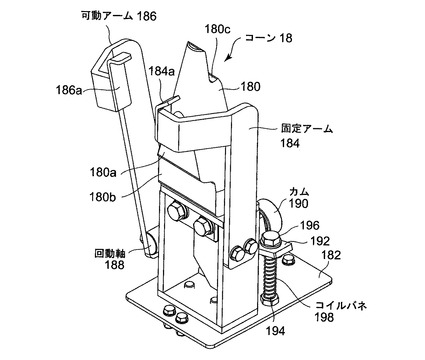
図2において、ワークを嵌挿するコーン本体180は、無端チェーン12に固定された台板182上に正立状態で固定されている。コーン本体180の両側面に一対の固定アーム184及び可動アーム186が装着されている。固定アーム184及び固定アーム184にはワークを両側から押える押え板184a及び186aが設けられている。固定アーム184はコーン本体180の側面に固定されている。可動アーム186は、回動軸188に連結されている。回動軸188には、コーン本体180の背面側で円筒形のカム190が回転自在に装着されていると共に、受け板192が一体に連結されている。
【0034】
台板182にネジ軸194が立設され、受け板192に穿設された孔にネジ軸194が挿入されている。ネジ軸194の上端にナット196が螺着している。台板182と受け板192との間にコイルバネ198が介装され、受け板192はコイルバネ198のバネ力で上方に押され、ナット196に係止している。この状態で、可動アーム186は、固定アーム184から後退しており、押え板184a及び186aは、互いに離れている。押え板186aの上端はL字形をなし、押え板184aの上端は、押え板186aに対して後方に傾斜した平面形状をなしている。これら押え板の形状によって、ワークに対する挟持力を増大させワークの固定を強化している。
【0035】
ワークが押え板184a、186aによって把持される側のコーン本体180の面180aは、平面状に形成されている。平面180aにワークを当接することで、ワークを安定保持するようにしている。平面180aの下方に一段凹んだ低段平面180bが形成されている。これによって、後述する丸棒22及び第2切断刃26をコーン本体180に接近配置させることが可能になる。また、コーン本体180の上端には、後述する第1丸棒44の先端部位44aがコーン本体180の上部に接近配置可能なように、切欠部180cが形成されている。
【0036】
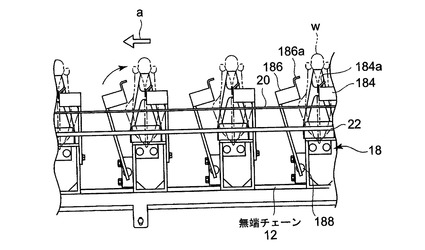
図3及び図4はワーク投入部Aを示す。ワーク投入部Aには、コーン18の正面側に水平方向にワーク位置決めガイド20及び丸棒22が配設されている。オペレータがコーン18にワークwを嵌挿固定する。即ち、首部nを上にし、かつ胸骨稜130を正面側、即ち、押え板184a、186a側に配置して嵌挿する。ワーク位置決めガイド20の上面が水平基準面hを形成し、胸骨稜130が水平基準面hに当り、かつヤゲン132が丸棒22に当ることで、ワークwが上下方向に位置決めされる。この状態でチェーン12が稼動し、コーン18は矢印a方向に搬送され、ワークwは上下方向に位置決めされたまま下流側にあるヤゲンカット部Bに搬送される。ワーク位置決めガイド20、丸棒22、固定アーム184及び可動アーム186で固定装置19を構成する。
【0037】
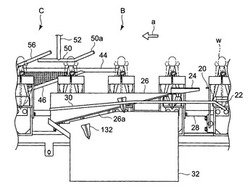
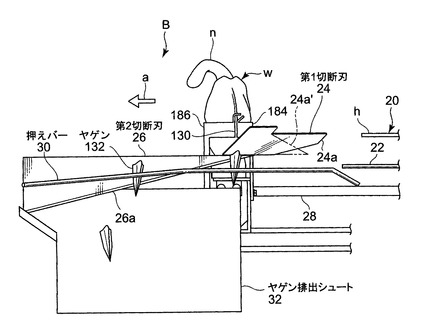
図5〜図7はヤゲンカット部Bを示す。ヤゲンカット部Bには、ワークwの搬送路に面して、搬送方向上流側に第1切断刃24が設けられ、第1切断刃24の直ぐ下流側に第2切断刃26が設けられている。第1切断刃24の搬送方向直前までワーク位置決めガイド20及び丸棒22が配置されている。ヤゲンカット部B及びその下流側に位置するカッパ外し部Cには、コーン18の搬送路に沿ってガイドレール28が水平方向に配設されている。ガイドレール28は、第1切断刃24の直ぐ上流側から駆動スプロケット14の上方まで配置されている。
【0038】
図6に示すように、第1切断刃24は、台形板状をなし、水平方向に配置されている。第1切断刃24の刃24aは、ワークwの搬送路に対して斜めに配置されている。これによって、ワークwが矢印a方向に搬送されることで、刃24aがワークwに徐々に接近し、胸骨稜130の下方に位置するヤゲン132を切断する。この場合、刃24aは図6で紙面手前側からヤゲン132に徐々に接近し、ヤゲン132を水平方向に切断する。なお、当初、刃先を矢印a方向と逆方向に向けた楔形状の板状切断刃(図6で二点斜線24a’で示す刃形)でヤゲン132を切断する実験を試みた。
【0039】
しかし、この切断刃では、ヤゲン132と同時に、ヤゲン132に隣接した内側枝骨144を切断するおそれがあることがわかった。内側枝骨144を切断すると、切断されたヤゲン132に内側枝骨144が混じるため、内側枝骨144の除去作業が必要になる。一方、刃24aの刃形とすることで、ヤゲン132のみを切断できる。
【0040】
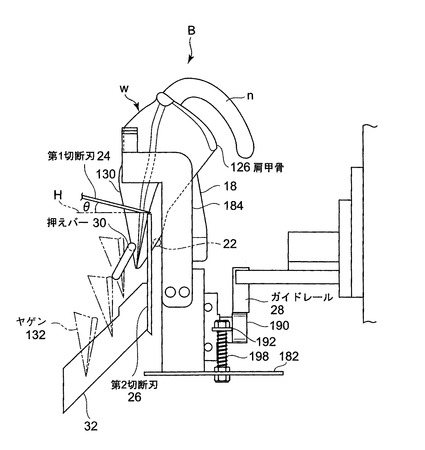
図7に示すように、第1切断刃24は、水平面Hに対し角度θ(15〜20°)を有するように配置されている。もし第1切断刃24が水平方向に配置されていれば、図11のラインcでヤゲン132を切断することになる。これに対し、本実施形態では、第1切断刃24が角度θを有しているため、ラインc1でヤゲン132を切断できる。ヤゲン132はラインc1に沿って境界を有するので、ラインc1でヤゲン132を切断することで、ヤゲン132の容積を増量できる。
【0041】
図7において、ガイドレール28は、第1切断刃24の上流側直前位置でカム190を下方に押し、可動アーム186を回動させ、押え板184a及び186aを閉じて、胸骨稜130を両側から挟み、胸骨稜130を固定する。そして、カッパ外し部Cの下流側で、カム190の押えが解除され、押え板186aは後退し、胸骨稜130の押えを開放する。かっぱ120は、駆動スプロケット14の上方で無端チェーン12が反転する時、かっぱ排出コンベア70に落下する。
【0042】
第2切断刃26は垂直方向に配置され、コーン18の搬送方向下流側に向かって幅広となる楔形板状をなし、斜め方向の下辺に刃26aが形成されている。ワークwが矢印a方向に搬送されることで、第2切断刃26の先端がヤゲン132の内側、即ち、ヤゲン132と内側枝骨144間に付着した膜146に挿入される。膜146がワークwの搬送と共に、第2切断刃26によって切り破られると共に、下方に切り下げられる。
【0043】
第2切断刃26の正面側(図6で第2切断刃26の手前側)には、矢印a方向に沿って丸棒からなる押えバー30が配設されている。押えバー30は第2切断刃26に対してヤゲン132を挟めるだけの間隔をもって並設されていると共に、ワークwの搬送方向下流側に向かって徐々に第2切断刃26との間隔を広げるように配置されている。第2切断刃26及び押えバー30の下方にはヤゲン排出シュート32が設けられている。かかる構成によって、押えバー30の前半では、第2切断刃26で膜146を切断中に、第2切断刃26と押えバー30とでヤゲン132を挟んでヤゲン132を第2切断刃26の外側面に保持し、押えバー30の後半では、第2切断刃26によって膜146が切り離されると共に、ヤゲン132がヤゲン排出シュート32に落下できるようにしている。
【0044】
図1に示すように、第1切断刃24及び第2切断刃26は、水平方向に配置されたフレーム34に連結され、これらは一体となったカッターユニット36を構成している。フレーム34の両端は垂直方向に配置されたガイトバー38a及び38bに上下方向に摺動可能に支持されている。フレーム34の中央部は垂直方向に配置されたネジ軸40に連結されている。フレーム34に連結され、ネジ軸40に螺合したナット42を回すことで、カッターユニット36の高さを調整可能になっている。これによって、水平基準面hに対する第1切断刃24及び第2切断刃26の切断位置を調整でき、ヤゲン132を切断する切断ラインcの位置を調整できる。
【0045】
なお、丸棒22はフレームを介してワーク位置決めガイド20に一体に接続され、ワーク位置決めガイド20及び丸棒22は、フレーム34を昇降させる前記昇降機構と同様の機構で昇降可能に構成されている。これによって、第1切断刃24及び第2切断刃26に対してワーク位置決めガイド20及び丸棒22の相対高さを調整できる。
【0046】
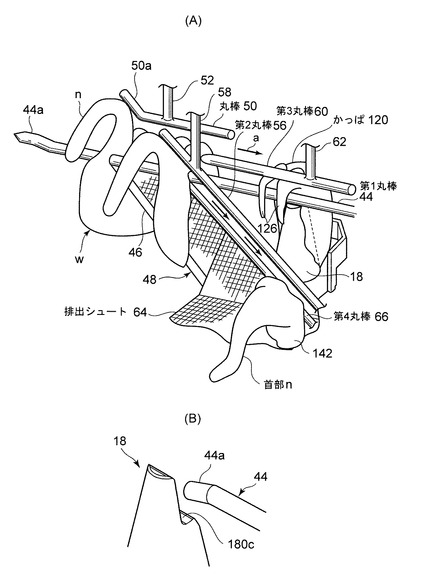
ヤゲン132が切断された後のワークwは、カッパ外し部Cに搬送される。図8及び図9はカッパ外し部Cを示す。図8は自動化装置10の正面側から視た図であり、図9(A)は背面側から視た図である。以下、カッパ外し部Cの構成を説明する。第2切断刃26の搬送方向下流側部位の上方に、第1丸棒44の先端部位44aが配置されている。第1丸棒44はワークwの搬送路上に矢印a方向に沿って配置されている。第1丸棒44の先端部位44aはワーク搬送路側へ斜めに曲げられ、搬送されてくるコーン本体180の切欠部180cに非接触で挿入された位置に配置される。搬送されてくるワークwは、図11の円dに示す位置、即ち烏口骨124と肩甲骨126との間に第1丸棒44の先端部位44aが突き刺さる。
【0047】
第1丸棒44の後半部位には、斜め方向に丸棒46が連結されている。第1丸棒44と丸棒46とで上下方向に拡幅する拡幅形成体48が形成されている。第1丸棒44によってワークwに形成された突き刺し孔は、ワークwの搬送に伴って、拡幅形成体48によって、上下方向に拡大される。こうして、肋骨118と胸骨128とが図11の切断ラインbで分離しはじめる。
【0048】
拡幅形成体48の上方には、丸棒50が支持バー52を介してフレーム54に連結されている。丸棒50は矢印a方向に向けられ、第1丸棒44との間に間隔を持たせた位置で第1丸棒44と平行に配置されている。丸棒50の上流側先端部位50aは、ワークwの搬送路に対し、上方にかつ正面側に向けて斜め方向に傾斜している。丸棒50は、第1丸棒44に突き刺された状態のワークwの首部nを、ワークwの搬送に伴って、自動化装置10の背面側に向ける作用を有する。
【0049】
丸棒50の下流側に、支持バー58を介して、斜め下方に向けて第2丸棒56が配設されている。第2丸棒56と並列に第4丸棒66が設けられている。第4丸棒66は、第1丸棒44に接続され、第2丸棒56とかっぱ120から分離された首部付き屠体本体142が通れるだけの所定間隔をもって平行に配置されている。第2丸棒56は、丸棒50によって背面側に向けられた首部nを下方に押し下げる作用を有する。そのため、首部nは第2丸棒56と第4丸棒66間を通りながら、下方へ押し下げられる。従って、ワークwは、首部付き屠体本体142とコーン18に固定されたかっぱ120とが徐々に分離していく。
【0050】
第2丸棒56の上方には、支持バー62を介して、第3丸棒60が配設されている。第3丸棒60は、矢印a方向に向けて配置されている。第1丸棒44の上方に、第1丸棒44と一定間隔をもって第1丸棒44と平行に配置されている。第1丸棒44と第3丸棒60との間隔は、かっぱ120に付随する一対の肩甲骨126が進入可能な間隔となっている。第2丸棒56によって首部nが押し下げられる一方、かっぱ120はコーン18に固定され、かっぱ120に付随する肩甲骨126は、第1丸棒44と第3丸棒60との間で第1丸棒44に引っ掛かった状態となる。
【0051】
第3丸棒60によって、烏甲骨124と鎖骨122を押え、烏甲骨124等が首側に行かないようにし、折れを防いでいる。前記構成とコーン18の搬送により、ワークwは、図11の切断ラインbで、首部付き屠体本体142とかっぱ120とに引き剥される。
【0052】
こうしてかっぱ120と分離された首部付き屠体本体142は、排出シュート64に落下し排出される。かっぱ120はコーン18に固定され、矢印a方向に搬送される。図1に示すように、ガイドレール28の終端が駆動スプロケット14の上方に位置する。ここでカム190がガイドレール28の押えから開放されることで、可動アーム186が後退し、かっぱ120はコーン18の固定から解除される。駆動スプロケット14の上方でコーン18が反転することで、かっぱ120は、駆動スプロケット14の下方に設けられたかっぱ排出コンベア70上に落下し、搬出される。コーン18は無端チェーン12の復路で倒立しながら搬送され、ワーク投入部Aに戻る。
【0053】
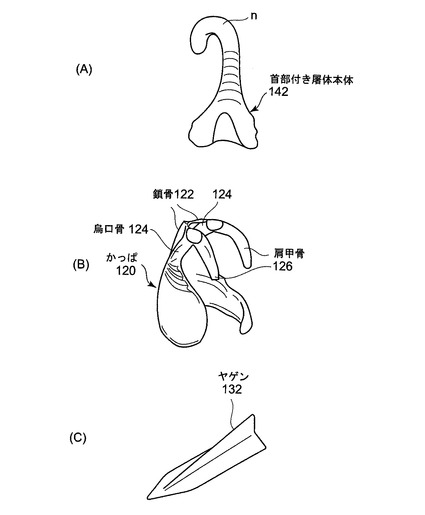
図10は、自動脱骨装置10で分離された首部付き屠体本体142、かっぱ120、及びヤゲン132を示す。かっぱ120には、鎖骨122、烏口骨124及び肩甲骨126が付随している。首部付き屠体本体142及びかっぱ120は、付着している肉を人手で除去し、除去した肉は食用に利用され、残った骨格は鶏がらスープ等に利用される。ヤゲン132は、焼き鳥として賞味されたり、あるいは変形性関節症やリューマチに効用があると言われるグルコサミン等の原料として利用される。
【0054】
本実施形態によれば、ワーク投入部Aで、ワークwをコーン18に嵌挿する時、水平方向に配置されたフレーム20の上面を水平基準面hとし、胸骨稜130をフレーム20に当て、かつヤゲン132を水平方向に配置された丸棒22に当てることで、ワークwを位置決めできると共に、ヤゲンカット部Bに向けてワークwを位置決めしたまま水平方向へ移動できる。また、第1切断刃24及び第2切断刃26をカッターユニット36に装着し、カッターユニット36の高さを調整自在にしたことで、水平基準面h及び丸棒22との相対高さを調節できる。そのため、ヤゲン132の切断ラインc1(図11参照)を上下方向の所望位置に調整できる。
【0055】
また、第1切断刃24の上流側で、ガイドレール28でカム190を押し下げ、ワークwの胸骨稜130を可動アーム186と固定アーム184で挟むことで、胸骨稜130を所定位置に確実に固定できる。これによって、切断ラインc1を所望位置に設定できる。さらに、可動アーム186の押えバー30の上端をL字形状としたことで、胸骨稜130の保持力を増強できる。また、ワークwを当接するコーン本体180の当接面180aを平面としたことで、ワークwの保持を安定化できる。さらに、当接面180aの下方に低段平面180bを形成したので、丸棒22及び第2切断刃26をコーン本体180に接近配置できる。
【0056】
なお、胸骨稜130におけるヤゲン132の境界は、図11のラインc1で示される。本実施形態では、第1切断刃24が、水平面Hに対し角度θ(15〜20°)を有するように配置されているので、ラインc1でヤゲン132を切断できる。そのため、切断されるヤゲン132の容積を最大限まで増量できる。また、第1切断刃24は、台形板状をなし、刃24aによって、刃24aは図6で紙面手前側からヤゲン132に徐々に接近し、ヤゲン132を水平方向に切断するようにしているので、ヤゲン132のみを切断でき、ヤゲン132に隣接する内側枝骨144を切断しない。これによって、内側枝骨144が切断後のヤゲン132に混入しないため、内側枝骨144の除去作業を要しない。
【0057】
第2切断刃26は、垂直方向、即ち、ヤゲン132の軸方向に向けて配置されているので、ヤゲン132を傷付けることなく、刃先を膜146に挿入できる。また、第2切断刃26は、楔形状をなすことで、ワークwの搬送によって、自動的に膜146を切り下げることができる。さらに、第2切断刃26と押えバー30とでヤゲン132を挟み、ヤゲン132を第2切断刃26の外側面にしばらく保持することで、ヤゲン132が膜146を介してワーク本体側に引っ張られるのを防止できる。これによって、ヤゲン132をワーク本体から完全に分離できる。
【0058】
こうして、ヤゲンカット部Bでは、ヤゲン132の分離工程を自動化でき、人手による作業と比べて、作業時間及び作業に要する人員を大幅に節減できる。また、コーン18の搬送装置以外に駆動装置を要しないので、該駆動装置を制御する制御装置も不要となり、装置構成を簡単かつ低コスト化できる。
【0059】
カッパ外し部Cでは、コーン本体180の上端に形成された切欠部180cに、第1丸棒44の先端部位44aを配置するようにして、先端部位44aをコーン本体180に近接配置しているので、ワークwの烏口骨124と肩甲骨126との間の部位(図11中の円d)に、第1丸棒44を確実に突き刺すことができる。
【0060】
また、丸棒50でワークwの首部nを搬送路から背面側へ向け、第1丸棒44に後続する拡幅形成体48で第1丸棒44の突き刺し孔を広げることで、ワークwの肋骨118と胸骨稜130とを分離すると共に、第2丸棒56で首部nを押し下げることで、首部付き屠体本体142とかっぱ120の分離を開始できる。さらに、第2丸棒56と第4丸棒66とで首部nを挟みながら、首部nの押し下げを継続すると共に、第1丸棒44と第3丸棒60とで肩甲骨126を挟み、かつ第3丸棒60で烏甲骨124及び鎖骨122をコーン18側に保持することで、かっぱ120をコーン18に固定しながら、首部付き骨格屠体142とかっぱ120とを確実かつ容易に分離できる。
【0061】
このように、カッパ外し部Cでも、首部付き屠体本体142とかっぱ120との分離工程を自動化できる。そのため、人手による作業と比べて、作業時間及び作業に要する人員を大幅に節減できる。また、コーン18の搬送装置以外に駆動装置を要しないので、該駆動装置を制御する制御装置も不要となり、装置構成を簡単かつ低コスト化できる。
【0062】
本実施形態の自動化装置10によって、ヤゲン分離とかっぱ分離とを単一の装置で同時に自動化できるので、人手による作業を比べて大幅に作業時間を短縮でき、効率化できる。例えば、自動脱骨装置10を用いれば、1時間で4,500羽を処理できる。これを人手で行なえば、少なくとも2人の人員を必要とする。さらに、チェーン12を駆動する駆動装置以外に、何らの駆動装置を必要としない。そのため、動力を最小限に抑えることができると共に、制御装置等を必要とせず、装置構成を簡単かつ低コスト化できる。
【産業上の利用可能性】
【0063】
本発明によれば、ヤゲンの切断分離工程を機械により自動化できるので、人手作業と比べて、作業工程を大幅に効率化できる。
【符号の説明】
【0064】
10 自動化装置
12 無端チェーン
14 駆動スプロケット
16 従動スプロケット
18 コーン
180 コーン本体
182 台板
184 固定アーム
184a,186a 押え板
186 可動アーム
188 回動軸
190 カム
192 受け板
194 ネジ軸
196 ナット
198 コイルバネ
19 固定装置
20 ワーク位置決めガイド
34,54 フレーム
22 丸棒
24 第1切断刃
26 第2切断刃
28 ガイドレール
30 押えバー
32 ヤゲン排出シュート
36 カッターユニット
38a,38b ガイトバー
40 ネジ軸
42 ナット
44 第1丸棒
46,50 丸棒
48 拡幅形成体
52,62 支持バー
56 第2丸棒
58 支持バー
60 第3丸棒
64 排出シュート
66 第4丸棒
70 かっぱ排出コンベア
100 首部付き屠体(ガラ)
120 胸側骨格(かっぱ)
124 烏口骨
126 肩甲骨
130 胸骨稜
132 胸骨稜軟骨部位(ヤゲン)
142 首部付き屠体本体
144 内側枝骨
146 膜
b、c 切断ライン
h 水平基準面
n 首部
w ワーク(首部付き屠体)
【技術分野】
【0001】
本発明は、鶏、かも、あひる等の食鳥屠体から脚部、手羽付き胸肉及びササミ等を分離した後の、通称「ガラ」と称される首部付き屠体から胸骨稜軟骨部位を分離する自動化された方法及び装置に関する。
【背景技術】
【0002】
本出願人は、長年食鳥屠体の自動脱骨技術の開発を手がけてきた。この開発過程で、例えば、内蔵を除去された中抜き屠体の脚部及び背中の一部を含む下半身と、首部、手羽、肋骨を含む胸部及び背中の一部を含む上半身とに分割する自動脱骨技術を完成させている(特許文献1)。また、もも部位の自動脱骨技術を完成すると共に(特許文献2)、上半身から手羽付き胸肉及びササミを分離する自動脱骨技術を完成させている(特許文献3)。
【0003】
図11に鶏の骨格を示す。鶏の骨格100は、頭蓋102から頚椎104、胸椎106を経て、尾椎108及び尾端骨110に至るまで背骨に相当する骨が繋がっている。手羽112は上腕骨114及び尺骨116等で構成されている。肩部には、手羽112と共に、鎖骨122、烏口骨124及び肩甲骨126が接続されている。肋骨118に胸骨128が接続され、胸骨128の下部に剣形状の胸骨稜130が存在し、胸骨稜130の下部に胸骨稜軟骨部位132が存在する。脚部136は、坐骨134に接続された大腿骨138及び大腿骨138に接続された脛骨140等からなる。なお、食鳥屠体において、胸骨稜130と胸骨稜130に隣接した内側枝骨144との間は、膜146で覆われている。
【0004】
食鳥屠体の自動脱骨工程は、まず、特許文献1に開示された自動脱骨装置により、内蔵を除去された食鳥屠体の上半身から脚部136及び坐骨134とが分割される。次に、特許文献3に開示された自動脱骨装置により、上半身から手羽付き胸肉及びササミが分離される。手羽付き胸肉及びササミが分離された首部付き屠体wは、通称「ガラ」と称される。首部付き屠体wは、人手によって、図11に示す切断ラインbで切断され、首部付き屠体本体142と、通称「かっぱ」と称される胸側骨格120と切断分離される。なお、鎖骨122、烏口骨124及び肩甲骨126は、胸側骨格120に付随する。
【0005】
分離された首部付き屠体本体142及び胸側骨格120は、まだ肉が付着しているので、付着している肉を人手で分離して食用に利用すると共に、残った骨格は鶏がらスープ等に利用される。胸骨稜軟骨部位132は、通称「ヤゲン」と称され、人手により切断ラインcで胸骨稜130と切断され、焼き鳥として賞味されたり、あるいは変形性関節症やリューマチに効用があると言われるグルコサミン等の原料として利用されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−223694号公報
【特許文献2】特開2002−10732号公報
【特許文献3】特開2008−307064号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
首部付き屠体(ガラ)wを首部付き屠体本体142と胸側骨格(かっぱ)120とに分離する作業、及び胸骨稜130から胸骨稜軟骨部位(ヤゲン)132を分離する作業は、まだ手作業で行なわれており、機械化による自動化はなされていない。そのため、これらの作業に多くの人手と時間を要している。
【0008】
本発明は、かかる従来技術の課題に鑑み、人手で行なわれている胸骨稜からの胸骨稜軟骨部位(ヤゲン)の分離作業を機械により自動化して、作業効率を飛躍的に高めることを目的とする。
【課題を解決するための手段】
【0009】
かかる目的を達成するため、本発明の胸骨稜軟骨部位の分離方法は、食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体をコーンに嵌挿し、胸骨稜を基準位置に設定された基準面に当てて固定する屠体投入工程と、首部付き屠体の胸骨稜を前記基準面によって設定される基準位置に保持した状態で、コーンを搬送させる搬送工程と、コーンの搬送路に面して固定された第1切断刃で、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断工程と、第1切断工程後、コーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定された第2切断刃を搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断工程と、第2切断刃と第2切断刃の外側に並設された押えバーとで胸骨稜軟骨部位を挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して前記膜を切断する膜分離工程と、からなるものである。
【0010】
本発明方法では、首部付き屠体をコーンに嵌挿し、胸骨稜を基準位置に設定された基準面に当てて固定する。そして、搬送工程では、該基準面に胸骨稜を当て、胸骨稜を基準位置に維持しながら搬送する。これによって、コーンの搬送路に設けられた後工程の切断領域で、切断刃に対する胸骨稜の相対位置を所望位置に位置決めできる。次に、コーンを搬送し、該切断領域で胸骨稜軟骨部位を切断分離する。該基準位置に対して切断領域に設けられた切断刃の高さを調整することで、胸骨稜軟骨部位の切断部位を調整できる。
【0011】
第1切断工程では、基準面に平行に固定された第1切断刃で、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する。第2切断工程では、胸骨稜軟骨部位の軸方向に向けて固定された第2切断刃で、胸骨稜軟骨部位と胸骨稜軟骨部位に隣接する内側枝骨144(図11参照)間に付着する膜146を切断する。その間、第2切断刃と第2切断刃の外側に並設された押えバーとで胸骨稜軟骨部位を挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持する。
【0012】
第2切断刃は、胸骨稜軟骨部位の軸方向に向けて固定されているので、胸骨稜軟骨部位を傷付けずに膜を切断できる。また、第2切断刃で膜を完全に切断する間、胸骨稜軟骨部位が膜に引っ張られずに第2切断刃の外側位置に保持できるので、胸骨稜軟骨部位を首部付き屠体から完全に引き離すことができる。本発明方法によって、胸骨稜軟骨部位の分離を機械で自動化できるので、これに要する人員を大幅に軽減できると共に、作業時間を大幅に短縮できる。
【0013】
本発明方法において、屠体投入工程及び搬送工程において、前記基準面が基準高さに設定された水平基準面であり、首部付き屠体の胸骨稜を基準高さに保持した状態でコーンを搬送させ、第1切断工程で第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させると共に、第2切断工程で第2切断刃を垂直に配置するとよい。基準面を水平基準面とすることで、首部付き屠体の基準面への設置(位置決め)と搬送、及び第1・第2切断刃の基準面に対する配置が容易になる。また、第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させることで、胸骨稜軟骨部位の境界線に沿った切断が可能となり、胸骨稜軟骨部位の容積を大きく取ることができる。
【0014】
また、第1切断工程において、第1切断刃の刃部がコーンの搬送方向に対して鈍角をなすように配置され、第1切断刃で胸骨稜軟骨部位を胸骨稜の外側から内側に向けて切断するようにするとよい。これによって、胸骨稜軟骨部位に隣接する内側枝骨144を切断することなく、胸骨稜軟骨部位のみを切断できる。そのため、切断された胸骨稜軟骨部位から内側枝骨144を除去する作業を必要としない。
【0015】
また、第2切断工程において、第2切断刃がコーンの搬送方向下流側に向かって幅広となる楔形板状体をなし、首部付き屠体の搬送に従って、楔形板状体の傾斜辺に形成された刃部で膜146を切断するようにするとよい。これによって、首部付き屠体の搬送に伴って、自動的に膜を切断できる。
【0016】
本発明方法において、第2切断工程後、第2切断刃の搬送方向下流側に設けられた分離装置により、首部付き屠体から胸側骨格を分離する分離工程を行なうようにするとよい。これによって、首部付き屠体をひとつの搬送路を搬送させるだけで、胸骨稜軟骨部位の分離と、首部付き屠体からの胸側骨格の分離とを連続して一度に行なうことができる。そのため、これら2つの作業に要する時間を大幅に短縮できると共に、これら2つの作業を自動化できるので、作業人員を大幅に削減できる。
【0017】
また、前記本発明方法の実施に直接使用可能な本発明の胸骨稜軟骨部位の分離装置は、食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体を嵌挿固定する複数のコーンと、複数のコーンが取り付けられ、複数のコーンを等間隔で搬送する搬送装置と、首部付き屠体の胸骨稜を基準位置に設定された基準面に当てた状態でコーンに固定する固定装置と、コーンの搬送方向に沿って配置され、基準面を形成するフレームと、コーンの搬送路に面して固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断刃と、第1切断刃の下流側にコーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断刃と、第2切断刃の外側に並設され、胸骨稜軟骨部位を第2切断刃とで挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して膜を切断する押えバーと、を備えているものである。
【0018】
本発明装置では、先ず、首部付き屠体をコーンに嵌挿し、胸骨稜をフレームによって形成される基準面に当てて固定する。そして、コーンを基準面によって設定される基準位置に維持したまま搬送し、第1切断刃で胸骨稜軟骨部位を胸骨稜から切断する。これによって、胸骨稜軟骨部位の所望位置を確実に切断できる。次に、第2切断刃で首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する。この時、第2切断刃と押えバーとで胸骨稜軟骨部位を挟み、胸骨稜軟骨部位を膜に引っ張られずに第2切断刃の外側面に保持することで、胸骨稜軟骨部位を首部付き屠体から完全分離できる。また、第2切断刃は、胸骨稜軟骨部位の軸方向に向けて固定されているので、胸骨稜軟骨部位を傷付けずに膜を切断できる。
【0019】
本発明装置によれば、胸骨稜軟骨部位の分離工程を自動化できるので、人手作業と比べて、大幅に効率化できる。また、コーンを搬送させる搬送装置以外に、一切の駆動装置を必要としないので、動力を最小限に低減でき、かつ駆動装置を制御するための複雑な制御装置も必要としない。そのため、装置構成を簡単かつ低コスト化できる。
【0020】
本発明装置において、前記基準面が基準高さに設定された水平基準面であり、搬送装置によって首部付き屠体の胸骨稜を基準高さに保持した状態でコーンを搬送させ、第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させると共に、第2切断刃を垂直に配置するとよい。基準面を水平基準面とすることで、首部付き屠体の基準面への設置と搬送、及び第1・第2切断刃の配置が容易になる。また、第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させることで、胸骨稜軟骨部位の境界線にそって胸骨稜軟骨部位を切断でき、胸骨稜軟骨部位の容積を大きく取ることができる。
【0021】
本発明装置において、第2切断刃が、コーンの搬送方向下流側に向かって幅広となる楔形板状体をなし、首部付き屠体の移動に従って、楔形板状体の傾斜辺に形成された刃で膜を切断するように構成されているとよい。これによって、首部付き屠体の搬送に従って、第2切断刃で自動的に膜を切断できる。
【0022】
本発明装置において、第1切断刃及び第2切断刃が1個のカッターユニットに装着され、前記基準面に対するカッターユニットの相対位置を調整可能にするとよい。これによって、胸骨稜軟骨部位の切断位置を容易に調整できるようになる。
【0023】
本発明装置において、固定装置が、少なくとも一方がコーンに回動可能に装着され、コーンに嵌挿された首部付き屠体の胸骨稜を両側から挟む一対のアームと、回動可能なアームに連結されたカムと、該回動可能なアームを開方向へバネ力を付勢するバネと、コーンの搬送方向に沿って水平に配置され、回動可能なアームを開方向へカムを動作させるガイドレールと、を備えているとよい。このように、ガイドレールを設けることで、一対のアームを開閉動作させるための一切の駆動装置及び該駆動装置を制御する制御装置を必要としない。また、ガイドレールの配置領域を決定するだけで、一対のアームの開閉タイミングを所望のタイミングに合わせることができる。
【0024】
前記構成に加えて、一対のアームの挟み面がL字形状をなしているとよい。これによって、胸骨稜を含め首部付き屠体をコーンに安定して固定できる。そのため、胸骨稜を基準面に安定保持できるようになり、第1切断刃及び第2切断刃で胸骨稜軟骨部位を所望位置で確実に切断できる。
【0025】
本発明装置において、第2切断刃の下流側にコーンの搬送路に面して、首付き屠体から胸側骨格を分離する分離装置を配置するとよい。これによって、首部付き屠体からの胸骨稜軟骨部位及び胸側骨格の分離を、ひとつの搬送路で搬送させるだけで連続して行なうことができる。そのため、これら2つの作業に要する時間を大幅に短縮できると共に、これら2つの作業を自動化できるので、作業人員を大幅に削減できる。
【発明の効果】
【0026】
本発明方法によれば、食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体をコーンに嵌挿し、胸骨稜を基準位置に設定された基準面に当てて固定する屠体投入工程と、首部付き屠体の胸骨稜を前記基準面によって設定される基準位置に保持した状態で、コーンを搬送させる搬送工程と、コーンの搬送路に面して固定された第1切断刃で、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断工程と、第1切断工程後、コーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定された第2切断刃を搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断工程と、第2切断刃と第2切断刃の外側に並設された押えバーとで胸骨稜軟骨部位を挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して前記膜を切断する膜分離工程と、からなるので、胸骨稜軟骨部位及び胸骨稜軟骨部位に付着する膜を所望位置で正確に切断できる。また、胸骨稜軟骨部位の分離を機械により自動化でき、作業時間を大幅に短縮できると共に、これに要する人手を大幅に軽減できる。
【0027】
また、本発明装置によれば、食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体を嵌挿固定する複数のコーンと、複数のコーンが取り付けられ、複数のコーンを等間隔で搬送する搬送装置と、首部付き屠体の胸骨稜を基準位置に設定された基準面に当てた状態でコーンに固定する固定装置と、コーンの搬送方向に沿って配置され、基準面を形成するフレームと、コーンの搬送路に面して固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断刃と、第1切断刃の下流側にコーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断刃と、第2切断刃の外側に並設され、胸骨稜軟骨部位を第2切断刃とで挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して膜を切断する押えバーと、を備えているので、前記本発明方法と同様の作用効果を得ることができる。
【0028】
また、コーンを搬送させる搬送装置以外に、一切の駆動装置を必要としないので、動力を最小限に低減できる。さらに、駆動装置を制御するための複雑な制御装置も必要としないので、装置構成を簡単かつ低コスト化できる。
【図面の簡単な説明】
【0029】
【図1】本発明方法及び装置の一実施形態に係る自動化装置の全体正面図である。
【図2】前記分離装置のコーンの斜視図である。
【図3】前記分離装置のワーク投入部の正面図である。
【図4】前記分離装置のワーク固定装置の側面図である。
【図5】前記分離装置のヤゲンカット部の正面図である。
【図6】前記ヤゲンカット部の切断刃の正面図である。
【図7】前記ヤゲンカット部の側面図である。
【図8】前記分離装置のかっぱ分離部の正面図である。
【図9】(A)は装置背面側から視た前記かっぱ分離部の斜視図であり、(B)はコーンと第1丸棒先端部位との位置関係を示す斜視図である。
【図10】(A)は前記自動化装置で分離された首部付き屠体本体を示し、(B)はかっぱを示し、(C)はヤゲンを示す斜視図である。
【図11】鶏の骨格を示す側面図である。
【発明を実施するための形態】
【0030】
以下、本発明を図に示した実施形態を用いて詳細に説明する。但し、この実施形態に記載されている構成部品の寸法、材質、形状、その相対配置などは特に特定的な記載がない限り、この発明の範囲をそれのみに限定する趣旨ではない。
【0031】
本発明方法及び装置を鶏の胸骨稜軟骨部位及び胸側骨格の分離に適用した一実施形態を図1〜図10に基づいて説明する。本実施形態では、鶏の屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体を「ワーク」と言い、ワークから分離される胸側骨格を「かっぱ」と言い、胸側骨格に付随した胸骨稜の下部領域である胸骨稜軟骨部位を「ヤゲン」と言う。
【0032】
図1において、本実施形態の自動化装置10は、無端チェーン12が駆動スプロケット14及び従動スプロケット16間に巻回され、水平方向に配置されている。無端チェーン12は、駆動スプロケット14によって矢印a方向に移動する。無端チェーン12には等間隔で多数のコーン18が装着されている。コーン18は、ワーク投入部Aからヤゲンカット部B及びカッパ外し部Cに向う往路で正立しており、カッパ外し部Cからワーク投入部Aに戻る復路で、倒立した状態となる。中央の支柱21の上端に操作盤23が設けられている。駆動スプロケット14の下方にかっぱ排出コンベア70が設けられている。
【0033】
図2において、ワークを嵌挿するコーン本体180は、無端チェーン12に固定された台板182上に正立状態で固定されている。コーン本体180の両側面に一対の固定アーム184及び可動アーム186が装着されている。固定アーム184及び固定アーム184にはワークを両側から押える押え板184a及び186aが設けられている。固定アーム184はコーン本体180の側面に固定されている。可動アーム186は、回動軸188に連結されている。回動軸188には、コーン本体180の背面側で円筒形のカム190が回転自在に装着されていると共に、受け板192が一体に連結されている。
【0034】
台板182にネジ軸194が立設され、受け板192に穿設された孔にネジ軸194が挿入されている。ネジ軸194の上端にナット196が螺着している。台板182と受け板192との間にコイルバネ198が介装され、受け板192はコイルバネ198のバネ力で上方に押され、ナット196に係止している。この状態で、可動アーム186は、固定アーム184から後退しており、押え板184a及び186aは、互いに離れている。押え板186aの上端はL字形をなし、押え板184aの上端は、押え板186aに対して後方に傾斜した平面形状をなしている。これら押え板の形状によって、ワークに対する挟持力を増大させワークの固定を強化している。
【0035】
ワークが押え板184a、186aによって把持される側のコーン本体180の面180aは、平面状に形成されている。平面180aにワークを当接することで、ワークを安定保持するようにしている。平面180aの下方に一段凹んだ低段平面180bが形成されている。これによって、後述する丸棒22及び第2切断刃26をコーン本体180に接近配置させることが可能になる。また、コーン本体180の上端には、後述する第1丸棒44の先端部位44aがコーン本体180の上部に接近配置可能なように、切欠部180cが形成されている。
【0036】
図3及び図4はワーク投入部Aを示す。ワーク投入部Aには、コーン18の正面側に水平方向にワーク位置決めガイド20及び丸棒22が配設されている。オペレータがコーン18にワークwを嵌挿固定する。即ち、首部nを上にし、かつ胸骨稜130を正面側、即ち、押え板184a、186a側に配置して嵌挿する。ワーク位置決めガイド20の上面が水平基準面hを形成し、胸骨稜130が水平基準面hに当り、かつヤゲン132が丸棒22に当ることで、ワークwが上下方向に位置決めされる。この状態でチェーン12が稼動し、コーン18は矢印a方向に搬送され、ワークwは上下方向に位置決めされたまま下流側にあるヤゲンカット部Bに搬送される。ワーク位置決めガイド20、丸棒22、固定アーム184及び可動アーム186で固定装置19を構成する。
【0037】
図5〜図7はヤゲンカット部Bを示す。ヤゲンカット部Bには、ワークwの搬送路に面して、搬送方向上流側に第1切断刃24が設けられ、第1切断刃24の直ぐ下流側に第2切断刃26が設けられている。第1切断刃24の搬送方向直前までワーク位置決めガイド20及び丸棒22が配置されている。ヤゲンカット部B及びその下流側に位置するカッパ外し部Cには、コーン18の搬送路に沿ってガイドレール28が水平方向に配設されている。ガイドレール28は、第1切断刃24の直ぐ上流側から駆動スプロケット14の上方まで配置されている。
【0038】
図6に示すように、第1切断刃24は、台形板状をなし、水平方向に配置されている。第1切断刃24の刃24aは、ワークwの搬送路に対して斜めに配置されている。これによって、ワークwが矢印a方向に搬送されることで、刃24aがワークwに徐々に接近し、胸骨稜130の下方に位置するヤゲン132を切断する。この場合、刃24aは図6で紙面手前側からヤゲン132に徐々に接近し、ヤゲン132を水平方向に切断する。なお、当初、刃先を矢印a方向と逆方向に向けた楔形状の板状切断刃(図6で二点斜線24a’で示す刃形)でヤゲン132を切断する実験を試みた。
【0039】
しかし、この切断刃では、ヤゲン132と同時に、ヤゲン132に隣接した内側枝骨144を切断するおそれがあることがわかった。内側枝骨144を切断すると、切断されたヤゲン132に内側枝骨144が混じるため、内側枝骨144の除去作業が必要になる。一方、刃24aの刃形とすることで、ヤゲン132のみを切断できる。
【0040】
図7に示すように、第1切断刃24は、水平面Hに対し角度θ(15〜20°)を有するように配置されている。もし第1切断刃24が水平方向に配置されていれば、図11のラインcでヤゲン132を切断することになる。これに対し、本実施形態では、第1切断刃24が角度θを有しているため、ラインc1でヤゲン132を切断できる。ヤゲン132はラインc1に沿って境界を有するので、ラインc1でヤゲン132を切断することで、ヤゲン132の容積を増量できる。
【0041】
図7において、ガイドレール28は、第1切断刃24の上流側直前位置でカム190を下方に押し、可動アーム186を回動させ、押え板184a及び186aを閉じて、胸骨稜130を両側から挟み、胸骨稜130を固定する。そして、カッパ外し部Cの下流側で、カム190の押えが解除され、押え板186aは後退し、胸骨稜130の押えを開放する。かっぱ120は、駆動スプロケット14の上方で無端チェーン12が反転する時、かっぱ排出コンベア70に落下する。
【0042】
第2切断刃26は垂直方向に配置され、コーン18の搬送方向下流側に向かって幅広となる楔形板状をなし、斜め方向の下辺に刃26aが形成されている。ワークwが矢印a方向に搬送されることで、第2切断刃26の先端がヤゲン132の内側、即ち、ヤゲン132と内側枝骨144間に付着した膜146に挿入される。膜146がワークwの搬送と共に、第2切断刃26によって切り破られると共に、下方に切り下げられる。
【0043】
第2切断刃26の正面側(図6で第2切断刃26の手前側)には、矢印a方向に沿って丸棒からなる押えバー30が配設されている。押えバー30は第2切断刃26に対してヤゲン132を挟めるだけの間隔をもって並設されていると共に、ワークwの搬送方向下流側に向かって徐々に第2切断刃26との間隔を広げるように配置されている。第2切断刃26及び押えバー30の下方にはヤゲン排出シュート32が設けられている。かかる構成によって、押えバー30の前半では、第2切断刃26で膜146を切断中に、第2切断刃26と押えバー30とでヤゲン132を挟んでヤゲン132を第2切断刃26の外側面に保持し、押えバー30の後半では、第2切断刃26によって膜146が切り離されると共に、ヤゲン132がヤゲン排出シュート32に落下できるようにしている。
【0044】
図1に示すように、第1切断刃24及び第2切断刃26は、水平方向に配置されたフレーム34に連結され、これらは一体となったカッターユニット36を構成している。フレーム34の両端は垂直方向に配置されたガイトバー38a及び38bに上下方向に摺動可能に支持されている。フレーム34の中央部は垂直方向に配置されたネジ軸40に連結されている。フレーム34に連結され、ネジ軸40に螺合したナット42を回すことで、カッターユニット36の高さを調整可能になっている。これによって、水平基準面hに対する第1切断刃24及び第2切断刃26の切断位置を調整でき、ヤゲン132を切断する切断ラインcの位置を調整できる。
【0045】
なお、丸棒22はフレームを介してワーク位置決めガイド20に一体に接続され、ワーク位置決めガイド20及び丸棒22は、フレーム34を昇降させる前記昇降機構と同様の機構で昇降可能に構成されている。これによって、第1切断刃24及び第2切断刃26に対してワーク位置決めガイド20及び丸棒22の相対高さを調整できる。
【0046】
ヤゲン132が切断された後のワークwは、カッパ外し部Cに搬送される。図8及び図9はカッパ外し部Cを示す。図8は自動化装置10の正面側から視た図であり、図9(A)は背面側から視た図である。以下、カッパ外し部Cの構成を説明する。第2切断刃26の搬送方向下流側部位の上方に、第1丸棒44の先端部位44aが配置されている。第1丸棒44はワークwの搬送路上に矢印a方向に沿って配置されている。第1丸棒44の先端部位44aはワーク搬送路側へ斜めに曲げられ、搬送されてくるコーン本体180の切欠部180cに非接触で挿入された位置に配置される。搬送されてくるワークwは、図11の円dに示す位置、即ち烏口骨124と肩甲骨126との間に第1丸棒44の先端部位44aが突き刺さる。
【0047】
第1丸棒44の後半部位には、斜め方向に丸棒46が連結されている。第1丸棒44と丸棒46とで上下方向に拡幅する拡幅形成体48が形成されている。第1丸棒44によってワークwに形成された突き刺し孔は、ワークwの搬送に伴って、拡幅形成体48によって、上下方向に拡大される。こうして、肋骨118と胸骨128とが図11の切断ラインbで分離しはじめる。
【0048】
拡幅形成体48の上方には、丸棒50が支持バー52を介してフレーム54に連結されている。丸棒50は矢印a方向に向けられ、第1丸棒44との間に間隔を持たせた位置で第1丸棒44と平行に配置されている。丸棒50の上流側先端部位50aは、ワークwの搬送路に対し、上方にかつ正面側に向けて斜め方向に傾斜している。丸棒50は、第1丸棒44に突き刺された状態のワークwの首部nを、ワークwの搬送に伴って、自動化装置10の背面側に向ける作用を有する。
【0049】
丸棒50の下流側に、支持バー58を介して、斜め下方に向けて第2丸棒56が配設されている。第2丸棒56と並列に第4丸棒66が設けられている。第4丸棒66は、第1丸棒44に接続され、第2丸棒56とかっぱ120から分離された首部付き屠体本体142が通れるだけの所定間隔をもって平行に配置されている。第2丸棒56は、丸棒50によって背面側に向けられた首部nを下方に押し下げる作用を有する。そのため、首部nは第2丸棒56と第4丸棒66間を通りながら、下方へ押し下げられる。従って、ワークwは、首部付き屠体本体142とコーン18に固定されたかっぱ120とが徐々に分離していく。
【0050】
第2丸棒56の上方には、支持バー62を介して、第3丸棒60が配設されている。第3丸棒60は、矢印a方向に向けて配置されている。第1丸棒44の上方に、第1丸棒44と一定間隔をもって第1丸棒44と平行に配置されている。第1丸棒44と第3丸棒60との間隔は、かっぱ120に付随する一対の肩甲骨126が進入可能な間隔となっている。第2丸棒56によって首部nが押し下げられる一方、かっぱ120はコーン18に固定され、かっぱ120に付随する肩甲骨126は、第1丸棒44と第3丸棒60との間で第1丸棒44に引っ掛かった状態となる。
【0051】
第3丸棒60によって、烏甲骨124と鎖骨122を押え、烏甲骨124等が首側に行かないようにし、折れを防いでいる。前記構成とコーン18の搬送により、ワークwは、図11の切断ラインbで、首部付き屠体本体142とかっぱ120とに引き剥される。
【0052】
こうしてかっぱ120と分離された首部付き屠体本体142は、排出シュート64に落下し排出される。かっぱ120はコーン18に固定され、矢印a方向に搬送される。図1に示すように、ガイドレール28の終端が駆動スプロケット14の上方に位置する。ここでカム190がガイドレール28の押えから開放されることで、可動アーム186が後退し、かっぱ120はコーン18の固定から解除される。駆動スプロケット14の上方でコーン18が反転することで、かっぱ120は、駆動スプロケット14の下方に設けられたかっぱ排出コンベア70上に落下し、搬出される。コーン18は無端チェーン12の復路で倒立しながら搬送され、ワーク投入部Aに戻る。
【0053】
図10は、自動脱骨装置10で分離された首部付き屠体本体142、かっぱ120、及びヤゲン132を示す。かっぱ120には、鎖骨122、烏口骨124及び肩甲骨126が付随している。首部付き屠体本体142及びかっぱ120は、付着している肉を人手で除去し、除去した肉は食用に利用され、残った骨格は鶏がらスープ等に利用される。ヤゲン132は、焼き鳥として賞味されたり、あるいは変形性関節症やリューマチに効用があると言われるグルコサミン等の原料として利用される。
【0054】
本実施形態によれば、ワーク投入部Aで、ワークwをコーン18に嵌挿する時、水平方向に配置されたフレーム20の上面を水平基準面hとし、胸骨稜130をフレーム20に当て、かつヤゲン132を水平方向に配置された丸棒22に当てることで、ワークwを位置決めできると共に、ヤゲンカット部Bに向けてワークwを位置決めしたまま水平方向へ移動できる。また、第1切断刃24及び第2切断刃26をカッターユニット36に装着し、カッターユニット36の高さを調整自在にしたことで、水平基準面h及び丸棒22との相対高さを調節できる。そのため、ヤゲン132の切断ラインc1(図11参照)を上下方向の所望位置に調整できる。
【0055】
また、第1切断刃24の上流側で、ガイドレール28でカム190を押し下げ、ワークwの胸骨稜130を可動アーム186と固定アーム184で挟むことで、胸骨稜130を所定位置に確実に固定できる。これによって、切断ラインc1を所望位置に設定できる。さらに、可動アーム186の押えバー30の上端をL字形状としたことで、胸骨稜130の保持力を増強できる。また、ワークwを当接するコーン本体180の当接面180aを平面としたことで、ワークwの保持を安定化できる。さらに、当接面180aの下方に低段平面180bを形成したので、丸棒22及び第2切断刃26をコーン本体180に接近配置できる。
【0056】
なお、胸骨稜130におけるヤゲン132の境界は、図11のラインc1で示される。本実施形態では、第1切断刃24が、水平面Hに対し角度θ(15〜20°)を有するように配置されているので、ラインc1でヤゲン132を切断できる。そのため、切断されるヤゲン132の容積を最大限まで増量できる。また、第1切断刃24は、台形板状をなし、刃24aによって、刃24aは図6で紙面手前側からヤゲン132に徐々に接近し、ヤゲン132を水平方向に切断するようにしているので、ヤゲン132のみを切断でき、ヤゲン132に隣接する内側枝骨144を切断しない。これによって、内側枝骨144が切断後のヤゲン132に混入しないため、内側枝骨144の除去作業を要しない。
【0057】
第2切断刃26は、垂直方向、即ち、ヤゲン132の軸方向に向けて配置されているので、ヤゲン132を傷付けることなく、刃先を膜146に挿入できる。また、第2切断刃26は、楔形状をなすことで、ワークwの搬送によって、自動的に膜146を切り下げることができる。さらに、第2切断刃26と押えバー30とでヤゲン132を挟み、ヤゲン132を第2切断刃26の外側面にしばらく保持することで、ヤゲン132が膜146を介してワーク本体側に引っ張られるのを防止できる。これによって、ヤゲン132をワーク本体から完全に分離できる。
【0058】
こうして、ヤゲンカット部Bでは、ヤゲン132の分離工程を自動化でき、人手による作業と比べて、作業時間及び作業に要する人員を大幅に節減できる。また、コーン18の搬送装置以外に駆動装置を要しないので、該駆動装置を制御する制御装置も不要となり、装置構成を簡単かつ低コスト化できる。
【0059】
カッパ外し部Cでは、コーン本体180の上端に形成された切欠部180cに、第1丸棒44の先端部位44aを配置するようにして、先端部位44aをコーン本体180に近接配置しているので、ワークwの烏口骨124と肩甲骨126との間の部位(図11中の円d)に、第1丸棒44を確実に突き刺すことができる。
【0060】
また、丸棒50でワークwの首部nを搬送路から背面側へ向け、第1丸棒44に後続する拡幅形成体48で第1丸棒44の突き刺し孔を広げることで、ワークwの肋骨118と胸骨稜130とを分離すると共に、第2丸棒56で首部nを押し下げることで、首部付き屠体本体142とかっぱ120の分離を開始できる。さらに、第2丸棒56と第4丸棒66とで首部nを挟みながら、首部nの押し下げを継続すると共に、第1丸棒44と第3丸棒60とで肩甲骨126を挟み、かつ第3丸棒60で烏甲骨124及び鎖骨122をコーン18側に保持することで、かっぱ120をコーン18に固定しながら、首部付き骨格屠体142とかっぱ120とを確実かつ容易に分離できる。
【0061】
このように、カッパ外し部Cでも、首部付き屠体本体142とかっぱ120との分離工程を自動化できる。そのため、人手による作業と比べて、作業時間及び作業に要する人員を大幅に節減できる。また、コーン18の搬送装置以外に駆動装置を要しないので、該駆動装置を制御する制御装置も不要となり、装置構成を簡単かつ低コスト化できる。
【0062】
本実施形態の自動化装置10によって、ヤゲン分離とかっぱ分離とを単一の装置で同時に自動化できるので、人手による作業を比べて大幅に作業時間を短縮でき、効率化できる。例えば、自動脱骨装置10を用いれば、1時間で4,500羽を処理できる。これを人手で行なえば、少なくとも2人の人員を必要とする。さらに、チェーン12を駆動する駆動装置以外に、何らの駆動装置を必要としない。そのため、動力を最小限に抑えることができると共に、制御装置等を必要とせず、装置構成を簡単かつ低コスト化できる。
【産業上の利用可能性】
【0063】
本発明によれば、ヤゲンの切断分離工程を機械により自動化できるので、人手作業と比べて、作業工程を大幅に効率化できる。
【符号の説明】
【0064】
10 自動化装置
12 無端チェーン
14 駆動スプロケット
16 従動スプロケット
18 コーン
180 コーン本体
182 台板
184 固定アーム
184a,186a 押え板
186 可動アーム
188 回動軸
190 カム
192 受け板
194 ネジ軸
196 ナット
198 コイルバネ
19 固定装置
20 ワーク位置決めガイド
34,54 フレーム
22 丸棒
24 第1切断刃
26 第2切断刃
28 ガイドレール
30 押えバー
32 ヤゲン排出シュート
36 カッターユニット
38a,38b ガイトバー
40 ネジ軸
42 ナット
44 第1丸棒
46,50 丸棒
48 拡幅形成体
52,62 支持バー
56 第2丸棒
58 支持バー
60 第3丸棒
64 排出シュート
66 第4丸棒
70 かっぱ排出コンベア
100 首部付き屠体(ガラ)
120 胸側骨格(かっぱ)
124 烏口骨
126 肩甲骨
130 胸骨稜
132 胸骨稜軟骨部位(ヤゲン)
142 首部付き屠体本体
144 内側枝骨
146 膜
b、c 切断ライン
h 水平基準面
n 首部
w ワーク(首部付き屠体)
【特許請求の範囲】
【請求項1】
食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体をコーンに嵌挿し、胸骨稜を基準位置に設定された基準面に当てて固定する屠体投入工程と、
首部付き屠体の胸骨稜を前記基準面によって設定される基準位置に保持した状態で、前記コーンを搬送させる搬送工程と、
前記コーンの搬送路に面して固定された第1切断刃で、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断工程と、
前記第1切断工程後、前記コーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定された第2切断刃を搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断工程と、
第2切断刃と該第2切断刃の外側に並設された押えバーとで胸骨稜軟骨部位を挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して前記膜を切断する膜分離工程と、からなることを特徴とする胸骨稜軟骨部位の分離方法。
【請求項2】
前記屠体投入工程及び搬送工程において、前記基準面が基準高さに設定された水平基準面であり、首部付き屠体の胸骨稜を前記基準高さに保持した状態で前記コーンを搬送させ、
前記第1切断工程で前記第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させると共に、前記第2切断工程で前記第2切断刃を垂直に配置したことを特徴とする請求項1に記載の胸骨稜軟骨部位の分離方法。
【請求項3】
前記第1切断工程において、前記第1切断刃の刃部が前記コーンの搬送方向に対して鈍角をなすように配置され、第1切断刃で胸骨稜軟骨部位を胸骨稜の外側から内側に向けて切断するようにしたことを特徴とする請求項1又は2に記載の胸骨稜軟骨部位の分離方法。
【請求項4】
前記第2切断工程において、前記第2切断刃が前記コーンの搬送方向下流側に向かって幅広となる楔形板状体をなし、首部付き屠体の搬送に従って、該楔形板状体の傾斜辺に形成された刃部で前記膜を切断するようにしたことを特徴とする請求項1又は2に記載の胸骨稜軟骨部位の分離方法。
【請求項5】
前記第2切断工程後、前記第2切断刃の搬送方向下流側に設けられた分離装置により、首部付き屠体から胸側骨格を分離する分離工程を行なうようにしたことを特徴とする請求項1又は2に記載の胸骨稜軟骨部位の分離方法。
【請求項6】
食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体を嵌挿固定する複数のコーンと、
該複数のコーンが取り付けられ、該複数のコーンを等間隔で搬送する搬送装置と、
首部付き屠体の胸骨稜を基準位置に設定された基準面に当てた状態で前記コーンに固定する固定装置と、
該コーンの搬送方向に沿って配置され、前記基準面を形成するフレームと、
前記コーンの搬送路に面して固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断刃と、
該第1切断刃の下流側に前記コーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断刃と、
該第2切断刃の外側に並設され、胸骨稜軟骨部位を第2切断刃とで挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して前記膜を切断する押えバーと、を備えていることを特徴とする胸骨稜軟骨部位の分離装置。
【請求項7】
前記基準面が基準高さに設定された水平基準面であり、前記搬送装置によって首部付き屠体の胸骨稜を前記基準高さに保持した状態で前記コーンを搬送させ、
前記第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させると共に、前記第2切断刃を垂直に配置したことを特徴とする請求項6に記載の胸骨稜軟骨部位の分離装置。
【請求項8】
前記第2切断刃が、前記コーンの搬送方向下流側に向かって幅広となる楔形板状体をなし、首部付き屠体の移動に従って、該楔形板状体の傾斜辺に形成された刃で前記膜を切断するように構成されていることを特徴とする請求項6又は7に記載の胸骨稜軟骨部位の分離装置。
【請求項9】
前記第1切断刃及び第2切断刃が1個のカッターユニットに装着され、該カッターユニットの前記基準面に対する相対位置が調整可能に構成されていることを特徴とする請求項6又は7に記載の胸骨稜軟骨部位の分離装置。
【請求項10】
前記固定装置が、少なくとも一方が前記コーンに回動可能に装着され、該コーンに嵌挿された首部付き屠体の胸骨稜を両側から挟む一対のアームと、回動可能なアームに連結されたカムと、該回動可能なアームを開方向へバネ力を付勢するバネと、前記コーンの搬送方向に沿って水平に配置され、前記回動可能なアームを開方向へ前記カムを動作させるガイドレールと、を備えていることを特徴とする請求項6又は7に記載の胸骨稜軟骨部位の分離装置。
【請求項11】
前記一対のアームの挟み面がL字形状をなしていることを特徴とする請求項10に記載の胸骨稜軟骨部位の分離装置。
【請求項12】
前記第2切断刃の下流側に、前記コーンの搬送路に面して、首部付き屠体から胸側骨格を分離する分離装置を配置したことを特徴とする請求項6又は7に記載の胸骨稜軟骨部位の分離装置。
【請求項1】
食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体をコーンに嵌挿し、胸骨稜を基準位置に設定された基準面に当てて固定する屠体投入工程と、
首部付き屠体の胸骨稜を前記基準面によって設定される基準位置に保持した状態で、前記コーンを搬送させる搬送工程と、
前記コーンの搬送路に面して固定された第1切断刃で、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断工程と、
前記第1切断工程後、前記コーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定された第2切断刃を搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断工程と、
第2切断刃と該第2切断刃の外側に並設された押えバーとで胸骨稜軟骨部位を挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して前記膜を切断する膜分離工程と、からなることを特徴とする胸骨稜軟骨部位の分離方法。
【請求項2】
前記屠体投入工程及び搬送工程において、前記基準面が基準高さに設定された水平基準面であり、首部付き屠体の胸骨稜を前記基準高さに保持した状態で前記コーンを搬送させ、
前記第1切断工程で前記第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させると共に、前記第2切断工程で前記第2切断刃を垂直に配置したことを特徴とする請求項1に記載の胸骨稜軟骨部位の分離方法。
【請求項3】
前記第1切断工程において、前記第1切断刃の刃部が前記コーンの搬送方向に対して鈍角をなすように配置され、第1切断刃で胸骨稜軟骨部位を胸骨稜の外側から内側に向けて切断するようにしたことを特徴とする請求項1又は2に記載の胸骨稜軟骨部位の分離方法。
【請求項4】
前記第2切断工程において、前記第2切断刃が前記コーンの搬送方向下流側に向かって幅広となる楔形板状体をなし、首部付き屠体の搬送に従って、該楔形板状体の傾斜辺に形成された刃部で前記膜を切断するようにしたことを特徴とする請求項1又は2に記載の胸骨稜軟骨部位の分離方法。
【請求項5】
前記第2切断工程後、前記第2切断刃の搬送方向下流側に設けられた分離装置により、首部付き屠体から胸側骨格を分離する分離工程を行なうようにしたことを特徴とする請求項1又は2に記載の胸骨稜軟骨部位の分離方法。
【請求項6】
食鳥屠体から脚部及び手羽付き胸肉を分離した後の首部付き屠体を嵌挿固定する複数のコーンと、
該複数のコーンが取り付けられ、該複数のコーンを等間隔で搬送する搬送装置と、
首部付き屠体の胸骨稜を基準位置に設定された基準面に当てた状態で前記コーンに固定する固定装置と、
該コーンの搬送方向に沿って配置され、前記基準面を形成するフレームと、
前記コーンの搬送路に面して固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位を胸骨稜から切断する第1切断刃と、
該第1切断刃の下流側に前記コーンの搬送路に面して胸骨稜軟骨部位の軸方向に向けて固定され、搬送されてくる首部付き屠体の胸骨稜軟骨部位の内側に突き刺し、首部付き屠体と胸骨稜軟骨部位間に付着した膜を切断する第2切断刃と、
該第2切断刃の外側に並設され、胸骨稜軟骨部位を第2切断刃とで挟み、胸骨稜軟骨部位を第2切断刃の外側位置に保持して前記膜を切断する押えバーと、を備えていることを特徴とする胸骨稜軟骨部位の分離装置。
【請求項7】
前記基準面が基準高さに設定された水平基準面であり、前記搬送装置によって首部付き屠体の胸骨稜を前記基準高さに保持した状態で前記コーンを搬送させ、
前記第1切断刃を水平面に対し15〜20°だけ下方へ傾斜させると共に、前記第2切断刃を垂直に配置したことを特徴とする請求項6に記載の胸骨稜軟骨部位の分離装置。
【請求項8】
前記第2切断刃が、前記コーンの搬送方向下流側に向かって幅広となる楔形板状体をなし、首部付き屠体の移動に従って、該楔形板状体の傾斜辺に形成された刃で前記膜を切断するように構成されていることを特徴とする請求項6又は7に記載の胸骨稜軟骨部位の分離装置。
【請求項9】
前記第1切断刃及び第2切断刃が1個のカッターユニットに装着され、該カッターユニットの前記基準面に対する相対位置が調整可能に構成されていることを特徴とする請求項6又は7に記載の胸骨稜軟骨部位の分離装置。
【請求項10】
前記固定装置が、少なくとも一方が前記コーンに回動可能に装着され、該コーンに嵌挿された首部付き屠体の胸骨稜を両側から挟む一対のアームと、回動可能なアームに連結されたカムと、該回動可能なアームを開方向へバネ力を付勢するバネと、前記コーンの搬送方向に沿って水平に配置され、前記回動可能なアームを開方向へ前記カムを動作させるガイドレールと、を備えていることを特徴とする請求項6又は7に記載の胸骨稜軟骨部位の分離装置。
【請求項11】
前記一対のアームの挟み面がL字形状をなしていることを特徴とする請求項10に記載の胸骨稜軟骨部位の分離装置。
【請求項12】
前記第2切断刃の下流側に、前記コーンの搬送路に面して、首部付き屠体から胸側骨格を分離する分離装置を配置したことを特徴とする請求項6又は7に記載の胸骨稜軟骨部位の分離装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−17452(P2013−17452A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−155265(P2011−155265)
【出願日】平成23年7月13日(2011.7.13)
【出願人】(000148357)株式会社前川製作所 (267)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月13日(2011.7.13)
【出願人】(000148357)株式会社前川製作所 (267)
【Fターム(参考)】
[ Back to top ]