
能動型振動騒音制御装置
【課題】周波数領域の適応フィルタを更新する際、参照信号及び誤差信号をフーリエ変換しないで得ることのできる能動型振動騒音制御装置を提供する。
【解決手段】周波数切替部92により所定周波数fを設定し、設定した所定周波数fの成分の抽出参照信号Srrと抽出誤差信号erとを、SAN型の抽出参照信号生成部34と抽出誤差信号生成部36とにより生成するように構成したので、参照信号と誤差信号とを従来技術のようにフーリエ変換する必要がなくなり、その分、制御信号Scを生成する際の演算負荷を低減することができる。
【解決手段】周波数切替部92により所定周波数fを設定し、設定した所定周波数fの成分の抽出参照信号Srrと抽出誤差信号erとを、SAN型の抽出参照信号生成部34と抽出誤差信号生成部36とにより生成するように構成したので、参照信号と誤差信号とを従来技術のようにフーリエ変換する必要がなくなり、その分、制御信号Scを生成する際の演算負荷を低減することができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、路面入力に基づく振動騒音を振動騒音打消音により打ち消す能動型振動騒音制御装置に関し、特に、車両等に搭載して好適な能動型振動騒音制御装置に関する。
【背景技術】
【0002】
車両の走行時に路面から受ける車輪の振動がサスペンションを介して車体に伝わり、車室内に振動騒音(ロードノイズ)が発生する。この振動騒音を、マイクロフォンが配置される評価点(受聴点)において前記振動騒音と逆位相の振動騒音打消音により打ち消す能動型振動騒音制御装置が提案されている(特許文献1)。
【0003】
この種の能動型振動騒音制御装置では、振動騒音の参照信号を利用し、マイクロフォンから得られる誤差信号が最小となるように、振動騒音打消音を生成するための制御信号を出力する適応フィルタのフィルタ係数を逐次更新するように構成されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表平8−502594号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1には、その図1bにおいて、騒音信号の時間領域での参照信号{x(n)}をフーリエ変換して周波数領域の参照信号(Xk)を得、この周波数領域の参照信号(Xk)を、誤差経路(C)を模擬した誤差経路特性(C)で補正した補正参照信号(XkC)に変換する一方、誤差信号{e(n)}をフーリエ変換して周波数領域の誤差信号(Ek)を得る。補正参照信号(XkC)と誤差信号(Ek)を合成して重なりスペクトル推定値を算出し、算出した重なりスペクトル推定値の逆フーリエ変換値に基づき、時間領域の適応フィルタ(W)のフィルタ係数を更新して制御信号y(n)を生成すると記載されているように見受けられる。また、特許文献1の図1aには、参照信号(Xk)ではなく、誤差信号(Ek)の補正誤差信号(CHEk)を利用しても同様に制御信号y(n)を生成できると記載されているように見受けられる。
【0006】
また、この特許文献1に係る技術では、その図3に示すように、車両に適用する際には、参照信号及び誤差信号を低域通過フィルタにより高域を遮断して入力するようにしている。
【0007】
しかしながら、特許文献1に係る技術では、参照信号及び誤差信号をフーリエ変換しているので、そのフーリエ変換による演算負荷が極めて大きく、且つ、フーリエ変換されたロードノイズに係る超低周波から遮断周波数までの広帯域で多様な周波数領域成分を処理する必要があり、結局、制御信号を生成する際の演算負荷が極めて大きくなるという課題がある。
【0008】
この発明は前記の課題を考慮してなされたものであり、所定周波数での振動騒音の低減量を向上させ(大きくさせ)、且つ制御信号を生成する際の演算負荷を少なくすることを可能とする能動型振動騒音制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この発明に係る能動型振動騒音制御装置は、路面入力に基づく振動騒音を検出し、検出した前記振動騒音を示す参照信号を出力する参照信号出力部と、前記参照信号が入力され、制御信号を出力する時間領域の適応フィルタと、前記制御信号に基づいて振動騒音打消音を発生する振動騒音打消部と、前記振動騒音と前記振動騒音打消音との差に基づく誤差信号を検出する誤差信号検出部と、前記参照信号から所定周波数成分を抽出した抽出参照信号を生成する抽出参照信号生成部と、前記誤差信号から前記所定周波数成分を抽出した抽出誤差信号を生成する抽出誤差信号生成部と、前記抽出参照信号と前記誤差信号に基づいて前記抽出誤差信号が最小となるように周波数領域の適応フィルタのフィルタ係数を逐次更新するフィルタ係数更新部と、前記周波数領域の前記適応フィルタのフィルタ係数を逆フーリエ変換することで、前記時間領域の前記適応フィルタのフィルタ係数に変換する逆フーリエ変換部と、前記抽出参照信号生成部及び前記抽出誤差信号生成部により所定周波数成分を抽出する前記所定周波数を切り替える周波数切替部と、を備えることを特徴とする。
【0010】
この発明によれば、周波数切替部により所定周波数を設定し、設定した所定周波数成分の抽出参照信号と抽出誤差信号とを、抽出参照信号生成部と抽出誤差信号生成部とにより生成するようにしているので、参照信号と誤差信号とを従来技術のようにフーリエ変換する必要がなくなり、その分、制御信号を生成する際の演算負荷を低減することができ、且つ所定周波数及び所定周波数の制御周波数範囲でのみ、周波数領域の適応フィルタを更新するようにしたので、その分さらに、制御信号を生成する際の演算負荷を低減することができる。
【0011】
(2)上記の特徴(1)を有する発明において、前記周波数切替部は、制御周波数範囲内で周波数掃引して前記所定周波数を切り替えるようにすることで、抽出参照信号及び抽出誤差信号を制御周波数範囲で速やかに得ることができる。
【0012】
(3)上記の特徴(1)又は(2)を有する発明において、前記抽出参照信号生成部は、前記所定周波数の基準信号を出力する基準信号生成部と、前記基準信号が入力され、前記抽出参照信号を出力する第1適応ノッチフィルタと、前記抽出参照信号を前記参照信号から減算して第1減算信号を生成する第1減算部と、前記基準信号と前記第1減算信号とに基づいて、前記第1減算信号が最小となるように前記第1適応ノッチフィルタのフィルタ係数を逐次更新する第1フィルタ係数更新部と、を備えることで構成することができる。
【0013】
第1適応ノッチフィルタにより所定周波数の抽出参照信号を生成するので、フーリエ変換に比較して少ない演算負荷で抽出参照信号を生成することができる。
【0014】
(4)上記の特徴(1)又は(2)を有する発明において、前記抽出誤差信号生成部は、前記所定周波数の基準信号を出力する基準信号生成部と、前記基準信号が入力され、前記抽出誤差信号を出力する第2適応ノッチフィルタと、前記抽出誤差信号を前記誤差信号から減算して第2減算信号を生成する第2減算部と、前記基準信号と前記第2減算信号とに基づいて、前記第2減算信号が最小となるように前記第2適応ノッチフィルタのフィルタ係数を逐次更新する第2フィルタ係数更新部と、を備えることを特徴とする。
【0015】
この場合にも、第2適応ノッチフィルタにより所定周波数の抽出誤差信号を生成するので、同様に、フーリエ変換に比較して少ない演算負荷で抽出誤差信号を生成することができる。
【発明の効果】
【0016】
この発明によれば、周波数切替部により所定周波数を設定し、設定した所定周波数成分の抽出参照信号と抽出誤差信号とを、抽出参照信号生成部と抽出誤差信号生成部とにより生成するようにしているので、参照信号と誤差信号とを従来技術のようにフーリエ変換する必要がなくなり、その分、制御信号を生成する際の演算負荷を低減することができる。且つ制御周波数範囲の所定周波数でのみ、周波数領域の適応フィルタを更新すればよいので、制御信号を生成する際の演算負荷をさらに低減することができる。
【図面の簡単な説明】
【0017】
【図1】この発明の一実施形態に係る、車両に搭載された能動型振動騒音制御装置の全体的な構成を示すブロック図である。
【図2】図1に示す能動型振動騒音制御装置のうち、抽出参照信号生成部と抽出誤差信号生成部の詳細な構成を示すブロック図である。
【図3】図1例の能動型振動騒音制御装置の動作説明に供されるフローチャートである。
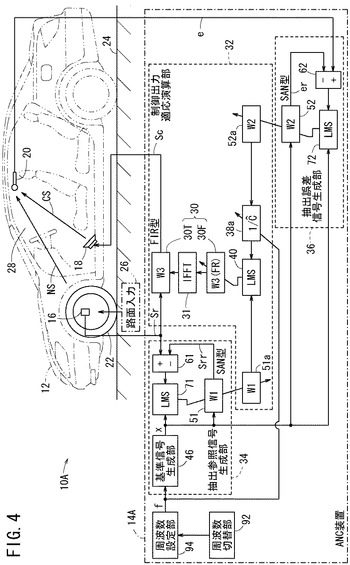
【図4】この発明の他の実施形態に係る、車両に搭載された能動型振動騒音制御装置の全体的な構成を示すブロック図である。
【発明を実施するための形態】
【0018】
以下、この発明の実施形態について図面を参照して説明する。
【0019】
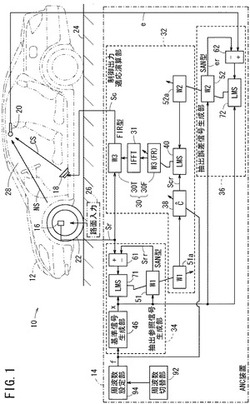
図1は、この発明の一実施形態に係る、車両12に搭載された能動型振動騒音制御装置10の全体的な構成を示すブロック図である。
【0020】
図1において、車両12は、能動型騒音制御装置{ANC(Adaptive Noise Control Apparatus)装置という。}14の他、サスペンションに設けられた加速度センサ16と、キックパネル等に設けられたスピーカ18と、乗員の受聴点の近傍に設けられたマイクロフォン20とを備える。
【0021】
加速度センサ16は、走行中の車両12が車輪22を通じて道路24から受ける、模式的に描いた路面入力26に基づく振動騒音を検出し、検出した振動騒音を示す参照信号SrをANC装置14に出力する。加速度センサ16は、ダンパーのストロークを検出するストロークセンサとしてもよい。
【0022】
ANC装置14は、時間領域のFIR型の適応フィルタ(適応FIRフィルタ)30Tを有し、時間領域の適応FIRフィルタ30Tは、参照信号Srに基づき制御信号Scを適応的に生成する。
【0023】
なお、時間領域の適応FIRフィルタ30Tのフィルタ係数W3は、周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)を逆フーリエ変換部(IFFT)31で逆フーリエ変換することによって得られる。
【0024】
時間領域の適応FIRフィルタ30Tと周波数領域の適応FIRフィルタ30Fを併せて適応フィルタ30という。
【0025】
ここで、周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)は、制御周波数範囲(制御対象周波数範囲)FR(例えば、周波数fが50[Hz]〜300[Hz]の1[Hz]毎)の全範囲(全周波数範囲)の各周波数(各所定周波数)f毎の位相データと振幅データ{実際には、所定周波数f毎の実部データと虚部データを持つ。実部データと虚部データとで位相角(位相データ)と大きさ(振幅データ)が表現される。}とからなる。この実施形態において、周波数領域のフィルタ係数W3(FR)は、サンプリング周期毎に所定周波数(制御対象周波数又は所定周波数ともいう。)fのみの位相データと振幅データとが更新される。逆フーリエ変換する際に、所定周波数f以外の周波数の位相データと振幅データとについては前回の位相データと振幅データが利用される。
【0026】
マイクロフォン20は、制御信号Scに基づいてスピーカ18により発生された振動騒音打消音CSと、路面入力26を原因として車室28内を伝達された振動騒音NSとの差に基づく誤差信号eを検出する。
【0027】
ANC装置14は、マイクロコンピュータ及びDSP等により構成され、CPUが各種入力に基づきROM等のメモリに記憶されているプログラムを実行することで各種の機能を実現する機能実現部(機能実現手段)としても動作する。
【0028】
この実施形態において、ANC装置14は、適応フィルタ30を有する制御出力適応演算部32と、前記参照信号Srから所定周波数fの成分(所定周波数成分という。)を抽出した抽出参照信号Srrを生成する抽出参照信号生成部34と、前記誤差信号eから前記所定周波数成分を抽出した抽出誤差信号erを生成する抽出誤差信号生成部36と、を備える。
【0029】
制御出力適応演算部32は、適応フィルタ30の他、スピーカ18からマイクロフォン20までの伝達経路(誤差伝達経路)を表す伝達特性Cを模擬した伝達特性C^(Cハット)を有し、所定周波数fでの抽出参照信号Srrを補正して補正参照信号Scrを出力するFIR型の補正部(フィルタ)38と、補正参照信号Scrと所定周波数fの抽出誤差信号erとに基づいて、所定周波数fでの抽出誤差信号erが最小となるように適応アルゴリズム演算、例えば、最小二乗法(LMS)を用いて周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)を逐次更新するフィルタ係数更新部40と、を備える。
【0030】
フィルタ係数更新部40は、制御周波数(制御対象周波数)範囲FRの全範囲の各周波数(各所定周波数)f毎の、周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)の位相データと振幅データ(実際には、実部データと虚部データ)のうち、所定周波数fのフィルタ係数W3(f)の位相データと振幅データ(実際には、実部データと虚部データ)とを更新する。
【0031】
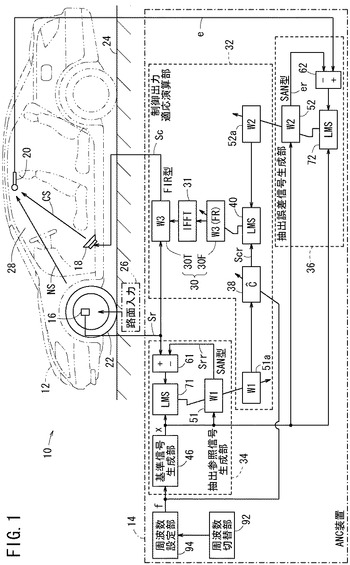
図2は、抽出参照信号生成部34と抽出誤差信号生成部36の詳細な構成を示している。
【0032】
図1及び図2に示すように、抽出参照信号生成部34は、所定周波数fの基準信号X(Rx、Ix)(Rx:実部基準信号cos2πft、Ix:虚部基準信号sin2πft)を出力する基準信号生成部46と、基準信号X(Rx,Ix)と参照信号Srとが入力され、抽出参照信号Srrを出力するSAN(Single Adaptive Notch)型適応フィルタである第1適応ノッチフィルタ51と、抽出参照信号Srrを参照信号Srから減算して第1減算信号(Sr−Srr)を生成する第1減算部61と、前記基準信号X(Rx,Ix)と前記第1減算信号(Sr−Srr)とに基づいて第1減算信号(Sr−Srr)が最小となるように適応アルゴリズム演算、例えば、最小二乗法(LMS)を用いて前記第1適応ノッチフィルタ51のフィルタ係数W1(Rw1,Iw1)を逐次更新する第1フィルタ係数更新部71と、を備える。
【0033】
第1適応ノッチフィルタ51のフィルタ係数W1(Rw1,Iw1)は、制御出力適応演算部32の第1適応ノッチフィルタ51aのフィルタ係数W1(Rw1,Iw1)に写される。このフィルタ係数W1(Rw1,Iw1)は、補正部38に入力される。
【0034】
上記したように、基準信号生成部46は、前記基準信号Xを構成する、所定周波数(制御周波数)fの実部基準信号Rxを出力する実部基準信号生成部42と所定周波数fの虚部基準信号Ixを出力する虚部基準信号生成部44とからなる。
【0035】
一方、抽出誤差信号生成部36は、基準信号X(Rx,Ix)と誤差信号eが入力され、抽出誤差信号erを出力する第2適応ノッチフィルタ52と、抽出誤差信号erを誤差信号eから減算して第2減算信号(e−er)を生成する第2減算部62と、基準信号X(Rx,Ix)と第2減算信号(e−er)とに基づいて、第2減算信号(e−er)が最小となるように適応アルゴリズム演算、例えば、最小二乗法(LMS)を用いて第2適応ノッチフィルタ52のフィルタ係数W2(Rw2,Iw2)を逐次更新する第2フィルタ係数更新部72と、を備える。
【0036】
第2適応ノッチフィルタ52のフィルタ係数W2(Rw2,Iw2)は、制御出力適応演算部32の第2適応ノッチフィルタ52aのフィルタ係数W2(Rw2,Iw2)に写される。このフィルタ係数W2(Rw2,Iw2)は、フィルタ係数更新部40に入力される。
【0037】
再び、図1において、ANC装置14は、さらに、前記基準信号生成部46における基準信号X(Rx,Ix)の所定周波数fを設定する周波数設定部94と、前記抽出参照信号生成部34及び前記抽出誤差信号生成部36により所定周波数成分の抽出参照信号Srrと抽出誤差信号erを抽出するため、且つ補正部38でのアドレスとして使用するための所定周波数fの切り替え指令を周波数設定部94に付与する周波数切替部92と、を備える。
【0038】
図2に示すように、前記第1適応ノッチフィルタ51は、実部フィルタ係数Rw1と虚部フィルタ係数Iw1がそれぞれ設定される適応ノッチフィルタ54、55と、減算部(合成部)56とから構成される。また、第1フィルタ係数更新部71は、実部フィルタ係数Rw1を逐次更新する、乗算部102と、ステップサイズパラメータμを付与するステップサイズパラメータ付与部104と、からなる実部フィルタ係数更新部71rと、虚部フィルタ係数Iw1を逐次更新する、乗算部106とステップサイズパラメータ「−μ」を付与するステップサイズパラメータ付与部108とからなる虚部フィルタ係数更新部71iとから構成される。
【0039】
さらに、前記第2適応ノッチフィルタ52は、実部フィルタ係数Rw2と虚部フィルタ係数Iw2がそれぞれ設定される適応ノッチフィルタ57、58と、減算部(合成部)59とから構成される。また、第2フィルタ係数更新部72は、実部フィルタ係数Rw2を逐次更新する、乗算部112とステップサイズパラメータμを付与するステップサイズパラメータ付与部114とからなる実部フィルタ係数更新部72rと、虚部フィルタ係数Iw2を逐次更新する乗算部116とステップサイズパラメータ「−μ」を付与するステップサイズパラメータ付与部118とからなる虚部フィルタ係数更新部72iと、から構成される。
【0040】
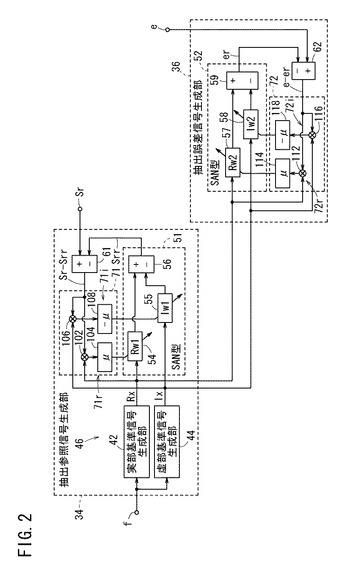
次に、基本的には以上のように構成される能動型振動騒音制御装置10の動作について、図3のフローチャートを参照して説明する。なお、周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)には、制御周波数範囲FRの全範囲の各周波数(各所定周波数)f毎の前回処理時の位相データと振幅データが格納されているものとする。
【0041】
加速度センサ16(参照信号出力部)は、道路24を走行する車両12に対する道路24から車輪22を通じての路面入力26に基づく振動騒音を検出し、検出した前記振動騒音を示す参照信号Srを出力する。ステップS1にて、この参照信号SrはANC装置14でデジタル信号に変換され参照信号Srとして抽出参照信号生成部34及び制御出力適応演算部32に入力される。
【0042】
ステップS2にて、周波数切替部92は、ロードノイズに対応する所定周波数である制御周波数範囲FR、例えば50[Hz]〜300[Hz]の間で1[Hz]ずつ、所定時間間隔で、周波数fを切り替える(周波数fを50[Hz]、51[Hz]、…300[Hz]と掃引する)ように周波数設定部94に指令を送る。まず、周波数fが、例えば、所定時間の間、所定周波数f(f=50[Hz])に設定される。
【0043】
周波数設定部94は、指令に応じて設定された所定周波数fで、抽出参照信号生成部34を構成する基準信号生成部46を駆動する。ステップS3にて、基準信号生成部46は、実部基準信号生成部42を通じて実部基準信号Rx(cos2πft)を生成し出力するとともに、虚部基準信号生成部44で虚部基準信号Ix(sin2πft)を生成して出力する。
【0044】
ステップS4にて、SAN型適応フィルタである第1適応ノッチフィルタ51を有する抽出参照信号生成部34は、次の(1)、(2)式に示す公知の適応更新演算式により実部フィルタ係数Rw1と虚部フィルタ係数Iw1とを、サンプリング時間ts毎に参照信号Srに係る第1減算信号(Sr−Srr)が最小となるように、すなわちSrr=Srとなるように、更新する。
Rw1n+1←Rw1n+μ・Rx・(Sr−Srr) …(1)
Iw1n+1←Iw1n−μ・Ix・(Sr−Srr) …(2)
ただし、Srr=Rx・Rw1−Ix・Iw1…(3)である。
【0045】
ここで、加速度センサ16から出力される参照信号Srは、ノイズを含んだ実部成分であるが、所定周波数fのBPFとして機能する抽出参照信号生成部34から出力される抽出参照信号Srrは、所定周波数f成分のみの実部成分の参照信号となることに留意する。なお、ステップS4にて、生成された抽出参照信号Srrの実部フィルタ係数Rw1及び虚部フィルタ係数Iw1は、第1適応ノッチフィルタ51aに写される。
【0046】
一方、ステップS5にて、SAN型適応フィルタである第2適応ノッチフィルタ52を有する抽出誤差信号生成部36は、次の(4)、(5)式に示す公知の適応更新演算式により実部フィルタ係数Rw2と虚部フィルタ係数Iw2とを、サンプリング時間ts毎に誤差信号eに係る第2減算信号(e−er)が最小となるように、すなわちer=eとなるように更新する。
Rw2n+1←Rw2n+μ・Rx・(e−er) …(4)
Iw2n+1←Iw2n−μ・Ix・(e−er) …(5)
ただし、er=Rx・Rw2−Ix・Iw2…(6)である。
【0047】
この場合にも、マイクロフォン20から出力される誤差信号eは、ノイズを含んだ実部成分であるが、所定周波数fのBPFとして機能する抽出誤差信号生成部36から出力される抽出誤差信号erは、所定周波数f成分のみの実部成分の誤差信号となることに留意する。なお、ステップS5にて、生成された抽出誤差信号erの実部フィルタ係数Rw2及び虚部フィルタ係数Iw2は、第2適応ノッチフィルタ52aに写される。
【0048】
次いで、ステップS6にて、周波数領域で、補正参照信号Scrが生成される。この場合、補正部38から所定周波数fでの伝達特性C^(振幅データと位相データに対応する実部成分と虚部成分)が読み出され、第1適応ノッチフィルタ51aのフィルタ係数W1に乗算され、所定周波数fの補正参照信号Scr(Rw1c,Iw1c)が生成されてフィルタ係数更新部40の一方の入力側に入力される。
【0049】
一方、ステップS7にて、第2適応ノッチフィルタ52aから抽出誤差信号erの実部フィルタ係数Rw2及び虚部フィルタ係数Iw2が読み出されて、フィルタ係数更新部40の他方の入力側に入力される。
【0050】
次いで、ステップS8にて、フィルタ係数更新部40において、補正参照信号Scr(Rw1c,Iw1c)と抽出誤差信号er(Rw2,Iw2)とに基づいて、抽出誤差信号er(Rw2,Iw2)が最小となるように、当該所定周波数fでの周波数領域のフィルタ係数W3(f)を決定する。フィルタ係数W3(f)は、実部データと虚部データとからなる。
【0051】
次に、ステップS9にて、周波数領域の適応FIRフィルタ30Fの制御周波数範囲の全周波数の各周波数のフィルタ係数W3(FR)中、当該所定周波数fでの周波数領域のフィルタ係数W3(f)をステップS8のフィルタ係数W3(f)に代替し(更新し)、更新後の制御周波数範囲の全周波数のフィルタ係数W3(FR)を逆フーリエ変換して、時間領域のフィルタ係数W3に変換する。
【0052】
そして、ステップS10にて、時間領域の適応FIRフィルタ30Tは、参照信号Srとフィルタ係数W3に対し時間領域での畳み込み演算を行い制御信号Scを生成し出力する。
【0053】
次いで、ステップS11にて、周波数fを切り替えてから所定時間が経過したか否かが判断され、経過していない場合には(ステップS11:NO)、所定周波数fでステップS3〜S10までが繰り返され、所定時間が経過したとき(ステップS11:YES)、周波数fが、50[Hz]から51[Hz]に切り替えられる。以下、同様に、300[Hz]まで1[Hz]ずつ所定時間毎に切り替えられ、また50[Hz]にもどり、ステップS3からの処理を繰り返す。
【0054】
以上説明したように、上述した実施形態に係る能動型振動騒音制御装置10は、路面入力26に基づく振動騒音を検出し、検出した前記振動騒音を示す参照信号Srを出力する参照信号出力部としての加速度センサ16と、参照信号Srが入力され、制御信号Scを出力する時間領域の適応FIRフィルタ30Tと、制御信号Scに基づいて振動騒音打消音CSを発生する振動騒音打消部としてのスピーカ18と、振動騒音NSと振動騒音打消音CSとの差に基づく誤差信号eを検出する誤差信号検出部としてのマイクロフォン20と、参照信号Srから所定周波数fの成分を抽出した抽出参照信号Srrを生成する抽出参照信号生成部34と、誤差信号eから所定周波数fの成分を抽出した抽出誤差信号erを生成する抽出誤差信号生成部36と、抽出参照信号Srrと抽出誤差信号erとに基づいて抽出誤差信号erが最小となるように周波数領域の適応FIRフィルタ30Fを更新するフィルタ係数更新部40と、前記周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)を逆フーリエ変換することで、前記時間領域の適応FIRフィルタ30Tのフィルタ係数W3に変換する逆フーリエ変換部31と、抽出参照信号生成部34及び抽出誤差信号生成部36により所定周波数fの成分を抽出する所定周波数fを切り替える周波数切替部92と、を備える。
【0055】
この能動型振動騒音制御装置10によれば、周波数切替部92により所定周波数fを設定し、設定した所定周波数fの成分の抽出参照信号Srrと抽出誤差信号erとを、抽出参照信号生成部34と抽出誤差信号生成部36とにより生成するようにしているので、参照信号と誤差信号とを従来技術のようにフーリエ変換する必要がなくなり、その分、制御信号Scを生成する際の演算負荷を低減することができ、且つ所定周波数f及び所定周波数fの周波数範囲FRでのみ、周波数領域の適応FIRフィルタ30Fを更新するようにしたので、その分さらに、制御信号Scを生成する際の演算負荷を低減することができる。
【0056】
この場合、周波数切替部92は、制御周波数範囲FR内で周波数掃引して(所定時間毎に)所定周波数fを切り替えるようにしているので、抽出参照信号Srr及び抽出誤差信号erを制御周波数範囲FRで速やかに得ることができる。
【0057】
なお、抽出参照信号生成部34は、所定周波数fの基準信号Xを出力する基準信号生成部46と、基準信号Xが入力され、抽出参照信号Srrを出力する第1適応ノッチフィルタ51と、抽出参照信号Srrを参照信号Srから減算して第1減算信号(Sr−Srr)を生成する第1減算部61と、基準信号Xと第1減算信号(Sr−Srr)とに基づいて、第1減算信号(Sr−Srr)が最小となるように第1適応ノッチフィルタ51のフィルタ係数W1(Rw1,Iw1)を逐次更新する第1フィルタ係数更新部71と、を備えることで構成することができる。
【0058】
第1適応ノッチフィルタ51により所定周波数fの抽出参照信号Srrを生成するので、フーリエ変換に比較して少ない演算負荷で抽出参照信号Srrを生成することができる。
【0059】
また、抽出誤差信号生成部36は、所定周波数fの基準信号Xを出力する基準信号生成部46(図1では、基準信号生成部46を抽出参照信号生成部34と共用しているが、個別に設けてもよい。)と、基準信号Xが入力され、抽出誤差信号erを出力する第2適応ノッチフィルタ52と、抽出誤差信号erを誤差信号eから減算して第2減算信号(e−er)を生成する第2減算部62と、基準信号Xと第2減算信号(e−er)とに基づいて、第2減算信号(e−er)が最小となるように第2適応ノッチフィルタ52のフィルタ係数W2(Rw2,Iw2)を逐次更新する第2フィルタ係数更新部72と、を備えることを特徴とする。
【0060】
第2適応ノッチフィルタ52により所定周波数fの抽出誤差信号erを生成するので、同様に、フーリエ変換に比較して少ない演算負荷で抽出誤差信号erを生成することができる。
【0061】
この実施形態によれば、周波数切替部92により所定周波数fを設定し、設定した所定周波数fの成分の抽出参照信号Srrと抽出誤差信号erとを、抽出参照信号生成部34と抽出誤差信号生成部36とにより生成するようにしているので、参照信号と誤差信号とを従来技術のようにフーリエ変換する必要がなくなり、その分、制御信号Scを生成する際の演算負荷を低減することができる。且つ制御周波数範囲(所定周波数範囲)FRの所定周波数fでのみ、周波数領域の適応FIRフィルタ30Fを更新すればよいので、制御信号Scを生成する際の演算負荷をさらに低減することができる。
【0062】
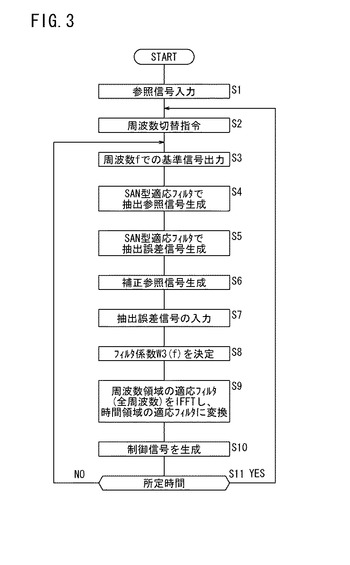
なお、周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(f)を更新する際には、図1の実施形態に係る能動型振動騒音制御装置10からスピーカ18からマイクロフォン20への伝達経路(誤差伝達経路)を表す伝達特性Cを模擬した伝達特性C^(Cハット)を省略し、図4の他の実施形態に係る、ANC装置14Aを備える能動型振動騒音制御装置10Aに示すように、伝達特性Cの逆数で表される逆伝達特性1/C^{マイクロフォン20からスピーカ18への伝達経路(誤差伝達経路)}を有する補正部(フィルタ)38aを、第2適応ノッチフィルタ52aとフィルタ係数更新部40との間に設けるように構成を変更してもよい。
【0063】
なお、この発明は、上述の実施形態に限らず、この明細書の記載内容に基づき、種々の構成を採り得ることはもちろんである。
【符号の説明】
【0064】
10、10A…能動型振動騒音制御装置 12…車両
14、14A…ANC装置 16…加速度センサ
18…スピーカ 20…マイクロフォン
22…車輪 24…道路
26…路面入力 28…車室
30…適応フィルタ
30F…周波数領域の適応FIRフィルタ
30T…時間領域の適応FIRフィルタ
31…逆フーリエ変換部 32…制御出力適応演算部
34…抽出参照信号生成部 36…抽出誤差信号生成部
38、38a…補正部 40…フィルタ係数更新部
46…基準信号生成部
51、51a…第1適応ノッチフィルタ
52、52a…第2適応ノッチフィルタ
71…第1フィルタ係数更新部 72…第2フィルタ係数更新部
92…周波数切替部 94…周波数設定部
【技術分野】
【0001】
この発明は、路面入力に基づく振動騒音を振動騒音打消音により打ち消す能動型振動騒音制御装置に関し、特に、車両等に搭載して好適な能動型振動騒音制御装置に関する。
【背景技術】
【0002】
車両の走行時に路面から受ける車輪の振動がサスペンションを介して車体に伝わり、車室内に振動騒音(ロードノイズ)が発生する。この振動騒音を、マイクロフォンが配置される評価点(受聴点)において前記振動騒音と逆位相の振動騒音打消音により打ち消す能動型振動騒音制御装置が提案されている(特許文献1)。
【0003】
この種の能動型振動騒音制御装置では、振動騒音の参照信号を利用し、マイクロフォンから得られる誤差信号が最小となるように、振動騒音打消音を生成するための制御信号を出力する適応フィルタのフィルタ係数を逐次更新するように構成されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表平8−502594号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1には、その図1bにおいて、騒音信号の時間領域での参照信号{x(n)}をフーリエ変換して周波数領域の参照信号(Xk)を得、この周波数領域の参照信号(Xk)を、誤差経路(C)を模擬した誤差経路特性(C)で補正した補正参照信号(XkC)に変換する一方、誤差信号{e(n)}をフーリエ変換して周波数領域の誤差信号(Ek)を得る。補正参照信号(XkC)と誤差信号(Ek)を合成して重なりスペクトル推定値を算出し、算出した重なりスペクトル推定値の逆フーリエ変換値に基づき、時間領域の適応フィルタ(W)のフィルタ係数を更新して制御信号y(n)を生成すると記載されているように見受けられる。また、特許文献1の図1aには、参照信号(Xk)ではなく、誤差信号(Ek)の補正誤差信号(CHEk)を利用しても同様に制御信号y(n)を生成できると記載されているように見受けられる。
【0006】
また、この特許文献1に係る技術では、その図3に示すように、車両に適用する際には、参照信号及び誤差信号を低域通過フィルタにより高域を遮断して入力するようにしている。
【0007】
しかしながら、特許文献1に係る技術では、参照信号及び誤差信号をフーリエ変換しているので、そのフーリエ変換による演算負荷が極めて大きく、且つ、フーリエ変換されたロードノイズに係る超低周波から遮断周波数までの広帯域で多様な周波数領域成分を処理する必要があり、結局、制御信号を生成する際の演算負荷が極めて大きくなるという課題がある。
【0008】
この発明は前記の課題を考慮してなされたものであり、所定周波数での振動騒音の低減量を向上させ(大きくさせ)、且つ制御信号を生成する際の演算負荷を少なくすることを可能とする能動型振動騒音制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この発明に係る能動型振動騒音制御装置は、路面入力に基づく振動騒音を検出し、検出した前記振動騒音を示す参照信号を出力する参照信号出力部と、前記参照信号が入力され、制御信号を出力する時間領域の適応フィルタと、前記制御信号に基づいて振動騒音打消音を発生する振動騒音打消部と、前記振動騒音と前記振動騒音打消音との差に基づく誤差信号を検出する誤差信号検出部と、前記参照信号から所定周波数成分を抽出した抽出参照信号を生成する抽出参照信号生成部と、前記誤差信号から前記所定周波数成分を抽出した抽出誤差信号を生成する抽出誤差信号生成部と、前記抽出参照信号と前記誤差信号に基づいて前記抽出誤差信号が最小となるように周波数領域の適応フィルタのフィルタ係数を逐次更新するフィルタ係数更新部と、前記周波数領域の前記適応フィルタのフィルタ係数を逆フーリエ変換することで、前記時間領域の前記適応フィルタのフィルタ係数に変換する逆フーリエ変換部と、前記抽出参照信号生成部及び前記抽出誤差信号生成部により所定周波数成分を抽出する前記所定周波数を切り替える周波数切替部と、を備えることを特徴とする。
【0010】
この発明によれば、周波数切替部により所定周波数を設定し、設定した所定周波数成分の抽出参照信号と抽出誤差信号とを、抽出参照信号生成部と抽出誤差信号生成部とにより生成するようにしているので、参照信号と誤差信号とを従来技術のようにフーリエ変換する必要がなくなり、その分、制御信号を生成する際の演算負荷を低減することができ、且つ所定周波数及び所定周波数の制御周波数範囲でのみ、周波数領域の適応フィルタを更新するようにしたので、その分さらに、制御信号を生成する際の演算負荷を低減することができる。
【0011】
(2)上記の特徴(1)を有する発明において、前記周波数切替部は、制御周波数範囲内で周波数掃引して前記所定周波数を切り替えるようにすることで、抽出参照信号及び抽出誤差信号を制御周波数範囲で速やかに得ることができる。
【0012】
(3)上記の特徴(1)又は(2)を有する発明において、前記抽出参照信号生成部は、前記所定周波数の基準信号を出力する基準信号生成部と、前記基準信号が入力され、前記抽出参照信号を出力する第1適応ノッチフィルタと、前記抽出参照信号を前記参照信号から減算して第1減算信号を生成する第1減算部と、前記基準信号と前記第1減算信号とに基づいて、前記第1減算信号が最小となるように前記第1適応ノッチフィルタのフィルタ係数を逐次更新する第1フィルタ係数更新部と、を備えることで構成することができる。
【0013】
第1適応ノッチフィルタにより所定周波数の抽出参照信号を生成するので、フーリエ変換に比較して少ない演算負荷で抽出参照信号を生成することができる。
【0014】
(4)上記の特徴(1)又は(2)を有する発明において、前記抽出誤差信号生成部は、前記所定周波数の基準信号を出力する基準信号生成部と、前記基準信号が入力され、前記抽出誤差信号を出力する第2適応ノッチフィルタと、前記抽出誤差信号を前記誤差信号から減算して第2減算信号を生成する第2減算部と、前記基準信号と前記第2減算信号とに基づいて、前記第2減算信号が最小となるように前記第2適応ノッチフィルタのフィルタ係数を逐次更新する第2フィルタ係数更新部と、を備えることを特徴とする。
【0015】
この場合にも、第2適応ノッチフィルタにより所定周波数の抽出誤差信号を生成するので、同様に、フーリエ変換に比較して少ない演算負荷で抽出誤差信号を生成することができる。
【発明の効果】
【0016】
この発明によれば、周波数切替部により所定周波数を設定し、設定した所定周波数成分の抽出参照信号と抽出誤差信号とを、抽出参照信号生成部と抽出誤差信号生成部とにより生成するようにしているので、参照信号と誤差信号とを従来技術のようにフーリエ変換する必要がなくなり、その分、制御信号を生成する際の演算負荷を低減することができる。且つ制御周波数範囲の所定周波数でのみ、周波数領域の適応フィルタを更新すればよいので、制御信号を生成する際の演算負荷をさらに低減することができる。
【図面の簡単な説明】
【0017】
【図1】この発明の一実施形態に係る、車両に搭載された能動型振動騒音制御装置の全体的な構成を示すブロック図である。
【図2】図1に示す能動型振動騒音制御装置のうち、抽出参照信号生成部と抽出誤差信号生成部の詳細な構成を示すブロック図である。
【図3】図1例の能動型振動騒音制御装置の動作説明に供されるフローチャートである。
【図4】この発明の他の実施形態に係る、車両に搭載された能動型振動騒音制御装置の全体的な構成を示すブロック図である。
【発明を実施するための形態】
【0018】
以下、この発明の実施形態について図面を参照して説明する。
【0019】
図1は、この発明の一実施形態に係る、車両12に搭載された能動型振動騒音制御装置10の全体的な構成を示すブロック図である。
【0020】
図1において、車両12は、能動型騒音制御装置{ANC(Adaptive Noise Control Apparatus)装置という。}14の他、サスペンションに設けられた加速度センサ16と、キックパネル等に設けられたスピーカ18と、乗員の受聴点の近傍に設けられたマイクロフォン20とを備える。
【0021】
加速度センサ16は、走行中の車両12が車輪22を通じて道路24から受ける、模式的に描いた路面入力26に基づく振動騒音を検出し、検出した振動騒音を示す参照信号SrをANC装置14に出力する。加速度センサ16は、ダンパーのストロークを検出するストロークセンサとしてもよい。
【0022】
ANC装置14は、時間領域のFIR型の適応フィルタ(適応FIRフィルタ)30Tを有し、時間領域の適応FIRフィルタ30Tは、参照信号Srに基づき制御信号Scを適応的に生成する。
【0023】
なお、時間領域の適応FIRフィルタ30Tのフィルタ係数W3は、周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)を逆フーリエ変換部(IFFT)31で逆フーリエ変換することによって得られる。
【0024】
時間領域の適応FIRフィルタ30Tと周波数領域の適応FIRフィルタ30Fを併せて適応フィルタ30という。
【0025】
ここで、周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)は、制御周波数範囲(制御対象周波数範囲)FR(例えば、周波数fが50[Hz]〜300[Hz]の1[Hz]毎)の全範囲(全周波数範囲)の各周波数(各所定周波数)f毎の位相データと振幅データ{実際には、所定周波数f毎の実部データと虚部データを持つ。実部データと虚部データとで位相角(位相データ)と大きさ(振幅データ)が表現される。}とからなる。この実施形態において、周波数領域のフィルタ係数W3(FR)は、サンプリング周期毎に所定周波数(制御対象周波数又は所定周波数ともいう。)fのみの位相データと振幅データとが更新される。逆フーリエ変換する際に、所定周波数f以外の周波数の位相データと振幅データとについては前回の位相データと振幅データが利用される。
【0026】
マイクロフォン20は、制御信号Scに基づいてスピーカ18により発生された振動騒音打消音CSと、路面入力26を原因として車室28内を伝達された振動騒音NSとの差に基づく誤差信号eを検出する。
【0027】
ANC装置14は、マイクロコンピュータ及びDSP等により構成され、CPUが各種入力に基づきROM等のメモリに記憶されているプログラムを実行することで各種の機能を実現する機能実現部(機能実現手段)としても動作する。
【0028】
この実施形態において、ANC装置14は、適応フィルタ30を有する制御出力適応演算部32と、前記参照信号Srから所定周波数fの成分(所定周波数成分という。)を抽出した抽出参照信号Srrを生成する抽出参照信号生成部34と、前記誤差信号eから前記所定周波数成分を抽出した抽出誤差信号erを生成する抽出誤差信号生成部36と、を備える。
【0029】
制御出力適応演算部32は、適応フィルタ30の他、スピーカ18からマイクロフォン20までの伝達経路(誤差伝達経路)を表す伝達特性Cを模擬した伝達特性C^(Cハット)を有し、所定周波数fでの抽出参照信号Srrを補正して補正参照信号Scrを出力するFIR型の補正部(フィルタ)38と、補正参照信号Scrと所定周波数fの抽出誤差信号erとに基づいて、所定周波数fでの抽出誤差信号erが最小となるように適応アルゴリズム演算、例えば、最小二乗法(LMS)を用いて周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)を逐次更新するフィルタ係数更新部40と、を備える。
【0030】
フィルタ係数更新部40は、制御周波数(制御対象周波数)範囲FRの全範囲の各周波数(各所定周波数)f毎の、周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)の位相データと振幅データ(実際には、実部データと虚部データ)のうち、所定周波数fのフィルタ係数W3(f)の位相データと振幅データ(実際には、実部データと虚部データ)とを更新する。
【0031】
図2は、抽出参照信号生成部34と抽出誤差信号生成部36の詳細な構成を示している。
【0032】
図1及び図2に示すように、抽出参照信号生成部34は、所定周波数fの基準信号X(Rx、Ix)(Rx:実部基準信号cos2πft、Ix:虚部基準信号sin2πft)を出力する基準信号生成部46と、基準信号X(Rx,Ix)と参照信号Srとが入力され、抽出参照信号Srrを出力するSAN(Single Adaptive Notch)型適応フィルタである第1適応ノッチフィルタ51と、抽出参照信号Srrを参照信号Srから減算して第1減算信号(Sr−Srr)を生成する第1減算部61と、前記基準信号X(Rx,Ix)と前記第1減算信号(Sr−Srr)とに基づいて第1減算信号(Sr−Srr)が最小となるように適応アルゴリズム演算、例えば、最小二乗法(LMS)を用いて前記第1適応ノッチフィルタ51のフィルタ係数W1(Rw1,Iw1)を逐次更新する第1フィルタ係数更新部71と、を備える。
【0033】
第1適応ノッチフィルタ51のフィルタ係数W1(Rw1,Iw1)は、制御出力適応演算部32の第1適応ノッチフィルタ51aのフィルタ係数W1(Rw1,Iw1)に写される。このフィルタ係数W1(Rw1,Iw1)は、補正部38に入力される。
【0034】
上記したように、基準信号生成部46は、前記基準信号Xを構成する、所定周波数(制御周波数)fの実部基準信号Rxを出力する実部基準信号生成部42と所定周波数fの虚部基準信号Ixを出力する虚部基準信号生成部44とからなる。
【0035】
一方、抽出誤差信号生成部36は、基準信号X(Rx,Ix)と誤差信号eが入力され、抽出誤差信号erを出力する第2適応ノッチフィルタ52と、抽出誤差信号erを誤差信号eから減算して第2減算信号(e−er)を生成する第2減算部62と、基準信号X(Rx,Ix)と第2減算信号(e−er)とに基づいて、第2減算信号(e−er)が最小となるように適応アルゴリズム演算、例えば、最小二乗法(LMS)を用いて第2適応ノッチフィルタ52のフィルタ係数W2(Rw2,Iw2)を逐次更新する第2フィルタ係数更新部72と、を備える。
【0036】
第2適応ノッチフィルタ52のフィルタ係数W2(Rw2,Iw2)は、制御出力適応演算部32の第2適応ノッチフィルタ52aのフィルタ係数W2(Rw2,Iw2)に写される。このフィルタ係数W2(Rw2,Iw2)は、フィルタ係数更新部40に入力される。
【0037】
再び、図1において、ANC装置14は、さらに、前記基準信号生成部46における基準信号X(Rx,Ix)の所定周波数fを設定する周波数設定部94と、前記抽出参照信号生成部34及び前記抽出誤差信号生成部36により所定周波数成分の抽出参照信号Srrと抽出誤差信号erを抽出するため、且つ補正部38でのアドレスとして使用するための所定周波数fの切り替え指令を周波数設定部94に付与する周波数切替部92と、を備える。
【0038】
図2に示すように、前記第1適応ノッチフィルタ51は、実部フィルタ係数Rw1と虚部フィルタ係数Iw1がそれぞれ設定される適応ノッチフィルタ54、55と、減算部(合成部)56とから構成される。また、第1フィルタ係数更新部71は、実部フィルタ係数Rw1を逐次更新する、乗算部102と、ステップサイズパラメータμを付与するステップサイズパラメータ付与部104と、からなる実部フィルタ係数更新部71rと、虚部フィルタ係数Iw1を逐次更新する、乗算部106とステップサイズパラメータ「−μ」を付与するステップサイズパラメータ付与部108とからなる虚部フィルタ係数更新部71iとから構成される。
【0039】
さらに、前記第2適応ノッチフィルタ52は、実部フィルタ係数Rw2と虚部フィルタ係数Iw2がそれぞれ設定される適応ノッチフィルタ57、58と、減算部(合成部)59とから構成される。また、第2フィルタ係数更新部72は、実部フィルタ係数Rw2を逐次更新する、乗算部112とステップサイズパラメータμを付与するステップサイズパラメータ付与部114とからなる実部フィルタ係数更新部72rと、虚部フィルタ係数Iw2を逐次更新する乗算部116とステップサイズパラメータ「−μ」を付与するステップサイズパラメータ付与部118とからなる虚部フィルタ係数更新部72iと、から構成される。
【0040】
次に、基本的には以上のように構成される能動型振動騒音制御装置10の動作について、図3のフローチャートを参照して説明する。なお、周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)には、制御周波数範囲FRの全範囲の各周波数(各所定周波数)f毎の前回処理時の位相データと振幅データが格納されているものとする。
【0041】
加速度センサ16(参照信号出力部)は、道路24を走行する車両12に対する道路24から車輪22を通じての路面入力26に基づく振動騒音を検出し、検出した前記振動騒音を示す参照信号Srを出力する。ステップS1にて、この参照信号SrはANC装置14でデジタル信号に変換され参照信号Srとして抽出参照信号生成部34及び制御出力適応演算部32に入力される。
【0042】
ステップS2にて、周波数切替部92は、ロードノイズに対応する所定周波数である制御周波数範囲FR、例えば50[Hz]〜300[Hz]の間で1[Hz]ずつ、所定時間間隔で、周波数fを切り替える(周波数fを50[Hz]、51[Hz]、…300[Hz]と掃引する)ように周波数設定部94に指令を送る。まず、周波数fが、例えば、所定時間の間、所定周波数f(f=50[Hz])に設定される。
【0043】
周波数設定部94は、指令に応じて設定された所定周波数fで、抽出参照信号生成部34を構成する基準信号生成部46を駆動する。ステップS3にて、基準信号生成部46は、実部基準信号生成部42を通じて実部基準信号Rx(cos2πft)を生成し出力するとともに、虚部基準信号生成部44で虚部基準信号Ix(sin2πft)を生成して出力する。
【0044】
ステップS4にて、SAN型適応フィルタである第1適応ノッチフィルタ51を有する抽出参照信号生成部34は、次の(1)、(2)式に示す公知の適応更新演算式により実部フィルタ係数Rw1と虚部フィルタ係数Iw1とを、サンプリング時間ts毎に参照信号Srに係る第1減算信号(Sr−Srr)が最小となるように、すなわちSrr=Srとなるように、更新する。
Rw1n+1←Rw1n+μ・Rx・(Sr−Srr) …(1)
Iw1n+1←Iw1n−μ・Ix・(Sr−Srr) …(2)
ただし、Srr=Rx・Rw1−Ix・Iw1…(3)である。
【0045】
ここで、加速度センサ16から出力される参照信号Srは、ノイズを含んだ実部成分であるが、所定周波数fのBPFとして機能する抽出参照信号生成部34から出力される抽出参照信号Srrは、所定周波数f成分のみの実部成分の参照信号となることに留意する。なお、ステップS4にて、生成された抽出参照信号Srrの実部フィルタ係数Rw1及び虚部フィルタ係数Iw1は、第1適応ノッチフィルタ51aに写される。
【0046】
一方、ステップS5にて、SAN型適応フィルタである第2適応ノッチフィルタ52を有する抽出誤差信号生成部36は、次の(4)、(5)式に示す公知の適応更新演算式により実部フィルタ係数Rw2と虚部フィルタ係数Iw2とを、サンプリング時間ts毎に誤差信号eに係る第2減算信号(e−er)が最小となるように、すなわちer=eとなるように更新する。
Rw2n+1←Rw2n+μ・Rx・(e−er) …(4)
Iw2n+1←Iw2n−μ・Ix・(e−er) …(5)
ただし、er=Rx・Rw2−Ix・Iw2…(6)である。
【0047】
この場合にも、マイクロフォン20から出力される誤差信号eは、ノイズを含んだ実部成分であるが、所定周波数fのBPFとして機能する抽出誤差信号生成部36から出力される抽出誤差信号erは、所定周波数f成分のみの実部成分の誤差信号となることに留意する。なお、ステップS5にて、生成された抽出誤差信号erの実部フィルタ係数Rw2及び虚部フィルタ係数Iw2は、第2適応ノッチフィルタ52aに写される。
【0048】
次いで、ステップS6にて、周波数領域で、補正参照信号Scrが生成される。この場合、補正部38から所定周波数fでの伝達特性C^(振幅データと位相データに対応する実部成分と虚部成分)が読み出され、第1適応ノッチフィルタ51aのフィルタ係数W1に乗算され、所定周波数fの補正参照信号Scr(Rw1c,Iw1c)が生成されてフィルタ係数更新部40の一方の入力側に入力される。
【0049】
一方、ステップS7にて、第2適応ノッチフィルタ52aから抽出誤差信号erの実部フィルタ係数Rw2及び虚部フィルタ係数Iw2が読み出されて、フィルタ係数更新部40の他方の入力側に入力される。
【0050】
次いで、ステップS8にて、フィルタ係数更新部40において、補正参照信号Scr(Rw1c,Iw1c)と抽出誤差信号er(Rw2,Iw2)とに基づいて、抽出誤差信号er(Rw2,Iw2)が最小となるように、当該所定周波数fでの周波数領域のフィルタ係数W3(f)を決定する。フィルタ係数W3(f)は、実部データと虚部データとからなる。
【0051】
次に、ステップS9にて、周波数領域の適応FIRフィルタ30Fの制御周波数範囲の全周波数の各周波数のフィルタ係数W3(FR)中、当該所定周波数fでの周波数領域のフィルタ係数W3(f)をステップS8のフィルタ係数W3(f)に代替し(更新し)、更新後の制御周波数範囲の全周波数のフィルタ係数W3(FR)を逆フーリエ変換して、時間領域のフィルタ係数W3に変換する。
【0052】
そして、ステップS10にて、時間領域の適応FIRフィルタ30Tは、参照信号Srとフィルタ係数W3に対し時間領域での畳み込み演算を行い制御信号Scを生成し出力する。
【0053】
次いで、ステップS11にて、周波数fを切り替えてから所定時間が経過したか否かが判断され、経過していない場合には(ステップS11:NO)、所定周波数fでステップS3〜S10までが繰り返され、所定時間が経過したとき(ステップS11:YES)、周波数fが、50[Hz]から51[Hz]に切り替えられる。以下、同様に、300[Hz]まで1[Hz]ずつ所定時間毎に切り替えられ、また50[Hz]にもどり、ステップS3からの処理を繰り返す。
【0054】
以上説明したように、上述した実施形態に係る能動型振動騒音制御装置10は、路面入力26に基づく振動騒音を検出し、検出した前記振動騒音を示す参照信号Srを出力する参照信号出力部としての加速度センサ16と、参照信号Srが入力され、制御信号Scを出力する時間領域の適応FIRフィルタ30Tと、制御信号Scに基づいて振動騒音打消音CSを発生する振動騒音打消部としてのスピーカ18と、振動騒音NSと振動騒音打消音CSとの差に基づく誤差信号eを検出する誤差信号検出部としてのマイクロフォン20と、参照信号Srから所定周波数fの成分を抽出した抽出参照信号Srrを生成する抽出参照信号生成部34と、誤差信号eから所定周波数fの成分を抽出した抽出誤差信号erを生成する抽出誤差信号生成部36と、抽出参照信号Srrと抽出誤差信号erとに基づいて抽出誤差信号erが最小となるように周波数領域の適応FIRフィルタ30Fを更新するフィルタ係数更新部40と、前記周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(FR)を逆フーリエ変換することで、前記時間領域の適応FIRフィルタ30Tのフィルタ係数W3に変換する逆フーリエ変換部31と、抽出参照信号生成部34及び抽出誤差信号生成部36により所定周波数fの成分を抽出する所定周波数fを切り替える周波数切替部92と、を備える。
【0055】
この能動型振動騒音制御装置10によれば、周波数切替部92により所定周波数fを設定し、設定した所定周波数fの成分の抽出参照信号Srrと抽出誤差信号erとを、抽出参照信号生成部34と抽出誤差信号生成部36とにより生成するようにしているので、参照信号と誤差信号とを従来技術のようにフーリエ変換する必要がなくなり、その分、制御信号Scを生成する際の演算負荷を低減することができ、且つ所定周波数f及び所定周波数fの周波数範囲FRでのみ、周波数領域の適応FIRフィルタ30Fを更新するようにしたので、その分さらに、制御信号Scを生成する際の演算負荷を低減することができる。
【0056】
この場合、周波数切替部92は、制御周波数範囲FR内で周波数掃引して(所定時間毎に)所定周波数fを切り替えるようにしているので、抽出参照信号Srr及び抽出誤差信号erを制御周波数範囲FRで速やかに得ることができる。
【0057】
なお、抽出参照信号生成部34は、所定周波数fの基準信号Xを出力する基準信号生成部46と、基準信号Xが入力され、抽出参照信号Srrを出力する第1適応ノッチフィルタ51と、抽出参照信号Srrを参照信号Srから減算して第1減算信号(Sr−Srr)を生成する第1減算部61と、基準信号Xと第1減算信号(Sr−Srr)とに基づいて、第1減算信号(Sr−Srr)が最小となるように第1適応ノッチフィルタ51のフィルタ係数W1(Rw1,Iw1)を逐次更新する第1フィルタ係数更新部71と、を備えることで構成することができる。
【0058】
第1適応ノッチフィルタ51により所定周波数fの抽出参照信号Srrを生成するので、フーリエ変換に比較して少ない演算負荷で抽出参照信号Srrを生成することができる。
【0059】
また、抽出誤差信号生成部36は、所定周波数fの基準信号Xを出力する基準信号生成部46(図1では、基準信号生成部46を抽出参照信号生成部34と共用しているが、個別に設けてもよい。)と、基準信号Xが入力され、抽出誤差信号erを出力する第2適応ノッチフィルタ52と、抽出誤差信号erを誤差信号eから減算して第2減算信号(e−er)を生成する第2減算部62と、基準信号Xと第2減算信号(e−er)とに基づいて、第2減算信号(e−er)が最小となるように第2適応ノッチフィルタ52のフィルタ係数W2(Rw2,Iw2)を逐次更新する第2フィルタ係数更新部72と、を備えることを特徴とする。
【0060】
第2適応ノッチフィルタ52により所定周波数fの抽出誤差信号erを生成するので、同様に、フーリエ変換に比較して少ない演算負荷で抽出誤差信号erを生成することができる。
【0061】
この実施形態によれば、周波数切替部92により所定周波数fを設定し、設定した所定周波数fの成分の抽出参照信号Srrと抽出誤差信号erとを、抽出参照信号生成部34と抽出誤差信号生成部36とにより生成するようにしているので、参照信号と誤差信号とを従来技術のようにフーリエ変換する必要がなくなり、その分、制御信号Scを生成する際の演算負荷を低減することができる。且つ制御周波数範囲(所定周波数範囲)FRの所定周波数fでのみ、周波数領域の適応FIRフィルタ30Fを更新すればよいので、制御信号Scを生成する際の演算負荷をさらに低減することができる。
【0062】
なお、周波数領域の適応FIRフィルタ30Fのフィルタ係数W3(f)を更新する際には、図1の実施形態に係る能動型振動騒音制御装置10からスピーカ18からマイクロフォン20への伝達経路(誤差伝達経路)を表す伝達特性Cを模擬した伝達特性C^(Cハット)を省略し、図4の他の実施形態に係る、ANC装置14Aを備える能動型振動騒音制御装置10Aに示すように、伝達特性Cの逆数で表される逆伝達特性1/C^{マイクロフォン20からスピーカ18への伝達経路(誤差伝達経路)}を有する補正部(フィルタ)38aを、第2適応ノッチフィルタ52aとフィルタ係数更新部40との間に設けるように構成を変更してもよい。
【0063】
なお、この発明は、上述の実施形態に限らず、この明細書の記載内容に基づき、種々の構成を採り得ることはもちろんである。
【符号の説明】
【0064】
10、10A…能動型振動騒音制御装置 12…車両
14、14A…ANC装置 16…加速度センサ
18…スピーカ 20…マイクロフォン
22…車輪 24…道路
26…路面入力 28…車室
30…適応フィルタ
30F…周波数領域の適応FIRフィルタ
30T…時間領域の適応FIRフィルタ
31…逆フーリエ変換部 32…制御出力適応演算部
34…抽出参照信号生成部 36…抽出誤差信号生成部
38、38a…補正部 40…フィルタ係数更新部
46…基準信号生成部
51、51a…第1適応ノッチフィルタ
52、52a…第2適応ノッチフィルタ
71…第1フィルタ係数更新部 72…第2フィルタ係数更新部
92…周波数切替部 94…周波数設定部
【特許請求の範囲】
【請求項1】
路面入力に基づく振動騒音を検出し、検出した前記振動騒音を示す参照信号を出力する参照信号出力部と、
前記参照信号が入力され、制御信号を出力する時間領域の適応フィルタと、
前記制御信号に基づいて振動騒音打消音を発生する振動騒音打消部と、
前記振動騒音と前記振動騒音打消音との差に基づく誤差信号を検出する誤差信号検出部と、
前記参照信号から所定周波数成分を抽出した抽出参照信号を生成する抽出参照信号生成部と、
前記誤差信号から前記所定周波数成分を抽出した抽出誤差信号を生成する抽出誤差信号生成部と、
前記抽出参照信号と前記誤差信号に基づいて前記抽出誤差信号が最小となるように周波数領域の適応フィルタのフィルタ係数を逐次更新するフィルタ係数更新部と、
前記周波数領域の前記適応フィルタのフィルタ係数を逆フーリエ変換することで、前記時間領域の前記適応フィルタのフィルタ係数に変換する逆フーリエ変換部と、
前記抽出参照信号生成部及び前記抽出誤差信号生成部により所定周波数成分を抽出する前記所定周波数を切り替える周波数切替部と、
を備えることを特徴とする能動型振動騒音制御装置。
【請求項2】
請求項1記載の能動型振動騒音制御装置において、
前記周波数切替部は、
制御周波数範囲内で周波数掃引して前記所定周波数を切り替える
ことを特徴とする能動型振動騒音制御装置。
【請求項3】
請求項1又は2記載の能動型振動騒音制御装置において、
前記抽出参照信号生成部は、
前記所定周波数の基準信号を出力する基準信号生成部と、
前記基準信号が入力され、前記抽出参照信号を出力する第1適応ノッチフィルタと、
前記抽出参照信号を前記参照信号から減算して第1減算信号を生成する第1減算部と、
前記基準信号と前記第1減算信号とに基づいて、前記第1減算信号が最小となるように前記第1適応ノッチフィルタのフィルタ係数を逐次更新する第1フィルタ係数更新部と、
を備えることを特徴とする能動型振動騒音制御装置。
【請求項4】
請求項1又は2記載の能動型振動騒音制御装置において、
前記抽出誤差信号生成部は、
前記所定周波数の基準信号を出力する基準信号生成部と、
前記基準信号が入力され、前記抽出誤差信号を出力する第2適応ノッチフィルタと、
前記抽出誤差信号を前記誤差信号から減算して第2減算信号を生成する第2減算部と、
前記基準信号と前記第2減算信号とに基づいて、前記第2減算信号が最小となるように前記第2適応ノッチフィルタのフィルタ係数を逐次更新する第2フィルタ係数更新部と、
を備えることを特徴とする能動型振動騒音制御装置。
【請求項1】
路面入力に基づく振動騒音を検出し、検出した前記振動騒音を示す参照信号を出力する参照信号出力部と、
前記参照信号が入力され、制御信号を出力する時間領域の適応フィルタと、
前記制御信号に基づいて振動騒音打消音を発生する振動騒音打消部と、
前記振動騒音と前記振動騒音打消音との差に基づく誤差信号を検出する誤差信号検出部と、
前記参照信号から所定周波数成分を抽出した抽出参照信号を生成する抽出参照信号生成部と、
前記誤差信号から前記所定周波数成分を抽出した抽出誤差信号を生成する抽出誤差信号生成部と、
前記抽出参照信号と前記誤差信号に基づいて前記抽出誤差信号が最小となるように周波数領域の適応フィルタのフィルタ係数を逐次更新するフィルタ係数更新部と、
前記周波数領域の前記適応フィルタのフィルタ係数を逆フーリエ変換することで、前記時間領域の前記適応フィルタのフィルタ係数に変換する逆フーリエ変換部と、
前記抽出参照信号生成部及び前記抽出誤差信号生成部により所定周波数成分を抽出する前記所定周波数を切り替える周波数切替部と、
を備えることを特徴とする能動型振動騒音制御装置。
【請求項2】
請求項1記載の能動型振動騒音制御装置において、
前記周波数切替部は、
制御周波数範囲内で周波数掃引して前記所定周波数を切り替える
ことを特徴とする能動型振動騒音制御装置。
【請求項3】
請求項1又は2記載の能動型振動騒音制御装置において、
前記抽出参照信号生成部は、
前記所定周波数の基準信号を出力する基準信号生成部と、
前記基準信号が入力され、前記抽出参照信号を出力する第1適応ノッチフィルタと、
前記抽出参照信号を前記参照信号から減算して第1減算信号を生成する第1減算部と、
前記基準信号と前記第1減算信号とに基づいて、前記第1減算信号が最小となるように前記第1適応ノッチフィルタのフィルタ係数を逐次更新する第1フィルタ係数更新部と、
を備えることを特徴とする能動型振動騒音制御装置。
【請求項4】
請求項1又は2記載の能動型振動騒音制御装置において、
前記抽出誤差信号生成部は、
前記所定周波数の基準信号を出力する基準信号生成部と、
前記基準信号が入力され、前記抽出誤差信号を出力する第2適応ノッチフィルタと、
前記抽出誤差信号を前記誤差信号から減算して第2減算信号を生成する第2減算部と、
前記基準信号と前記第2減算信号とに基づいて、前記第2減算信号が最小となるように前記第2適応ノッチフィルタのフィルタ係数を逐次更新する第2フィルタ係数更新部と、
を備えることを特徴とする能動型振動騒音制御装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−104911(P2013−104911A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246731(P2011−246731)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]