
能動型振動騒音抑制装置

【課題】振動または騒音をより早期に収束させることができる能動型振動騒音抑制装置を提供する。
【解決手段】正弦波制御信号y(n)は、振動または騒音の発生源の周波数、適応フィルタ係数としての振幅フィルタ係数a(n)および位相フィルタ係数φ(n)により構成される。そして、正弦波制御信号y(n)における位相成分として位相フィルタ係数φ(n)に対して1より大きな値を乗算した値を含む。これにより、位相フィルタ係数φ(n)を早期に収束させることができるため、結果として振動または騒音を早期に収束させることができる。
【解決手段】正弦波制御信号y(n)は、振動または騒音の発生源の周波数、適応フィルタ係数としての振幅フィルタ係数a(n)および位相フィルタ係数φ(n)により構成される。そして、正弦波制御信号y(n)における位相成分として位相フィルタ係数φ(n)に対して1より大きな値を乗算した値を含む。これにより、位相フィルタ係数φ(n)を早期に収束させることができるため、結果として振動または騒音を早期に収束させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、適応制御を用いて、能動的に振動または騒音を抑制することができる能動型振動騒音抑制装置に関するものである。
【背景技術】
【0002】
従来、適応制御を用いて能動的に振動または騒音を抑制する装置として、特許文献1〜3に記載されたものがある。特許文献1〜3には、適応制御アルゴリズムとしてLMSアルゴリズムを適用した制御方法について記載されている。特に、特許文献1,2には、Filtered-X LMSアルゴリズムのうちDXHSアルゴリズムについて記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−44377号公報
【特許文献2】特開平8−272378号公報
【特許文献3】特開平5−61483号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、振動または騒音をより早期に収束させることができる能動型振動騒音抑制装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の能動型振動騒音抑制装置は、制御振動または制御音を出力して、評価点における振動または騒音を能動的に抑制する能動型振動騒音抑制装置であって、振動または騒音の発生源の周波数、適応フィルタ係数としての振幅フィルタ係数および位相フィルタ係数により構成される正弦波制御信号y(n)を生成する制御信号生成部と、前記正弦波制御信号y(n)に応じた前記制御振動または制御音を出力する制御振動制御音発生装置と、前記評価点において前記発生源による振動または騒音と前記制御振動または制御音との干渉による残留信号e(n)を検出する残留信号検出部と、前回更新された前記振幅フィルタ係数a(n)に対して加減算して更新するための振幅更新項Δa(n+1)を、前記残留信号e(n)が小さくなるように算出する振幅フィルタ係数更新部と、前回更新された前記位相フィルタ係数φ(n)に対して加減算して更新するための位相更新項Δφ(n+1)を、前記残留信号e(n)が小さくなるように算出する位相フィルタ係数更新部と、を備え、前記正弦波制御信号y(n)は、位相成分として前記位相フィルタ係数φ(n)に対して1より大きな値を乗算した値を含む。
【0006】
本発明によれば、正弦波制御信号y(n)の位相成分において、位相フィルタ係数更新部において更新された位相フィルタ係数φ(n)そのままの値として用いるのではなく、位相フィルタ係数φ(n)に1より大きな値を乗算した値を用いる。つまり、更新された位相フィルタ係数φ(n)に比例した値を用いている。これにより、評価点において、制御振動または制御音の位相が、発生源から伝達された振動または騒音の位相に対して早期に逆位相となるように収束させることができる。その結果、評価点における振動または騒音自体を早期に収束させることができる。
【0007】
また、前記正弦波制御信号y(n)は、式(1)にて表されるようにしてもよい。これにより、確実に上記効果を奏することができる。
【0008】
【数1】

【0009】
また、前記振幅更新項Δa(n+1)は、式(2)の項を含み、前記位相更新項Δφ(n+1)は、式(3)の項を含むようにしてもよい。
【0010】
【数2】
【0011】
【数3】
【0012】
これにより、上述した効果、すなわち評価点における振動または騒音自体を早期に収束させることができることに加えて、次の効果を奏する。すなわち、正弦波制御信号y(n)が伝達関数Gを介して評価点に伝達された場合における当該制御振動または制御音が、振動発生源から評価点に伝達された振動または騒音に対してどのような位相であったとしても、最終的に制御を発散させずに収束させることができる。なお、安定化係数mは、1でもよく、1より大きな値でもよい。
【0013】
そうすると、式(2)における振幅係数a1、位相係数φ1および式(3)における振幅係数a2、位相係数φ2は、前記制御信号生成部と前記評価点との間の伝達関数Gに依存しない係数とすることができる。振幅更新項Δa(n+1)および位相更新項Δφ(n+1)における周期関数の位相成分として、伝達関数Gに無関係な値としたとしても、最終的に制御を収束させることができる。従って、伝達関数Gを同定する必要がなく、かつ、同定精度を追求する必要もない。そのため、演算処理を簡易的にすることができ、かつ、演算処理負荷を低減することができる。
【0014】
ここで、振幅係数a2および位相係数φ2が伝達関数Gに依存しない係数とした場合には、式(2)は、式(4)であり、式(3)は、式(5)とするとよい。これにより、確実に、制御を収束させることができる。
【0015】
【数4】
【0016】
【数5】
【0017】
一方、振幅更新項Δa(n+1)および位相更新項Δφ(n+1)が伝達関数Gを用いた項とすることもできる。この場合、前記能動型振動騒音抑制装置は、前記制御信号生成部と前記評価点との間の伝達関数の推定値を予め記憶する推定伝達関数記憶部をさらに備え、式(2)における振幅係数a1と位相係数φ1の少なくとも一方、および、式(3)における振幅係数a2と位相係数φ2の少なくとも一方は、前記伝達関数の推定値に基づいて得られる係数とするとよい。
【0018】
このとき、伝達関数Gの位相成分ΦGと推定伝達関数Ghの位相成分ΦhGとが−90°〜90°の範囲外となったとしても、最終的には制御が発散せずに収束させることができる。例えば、位相差が180°であったとしても、収束させることができる。ただし、伝達関数の同定精度が高ければ、より早く収束させることができる。
【0019】
そして、推定伝達関数を用いる場合には、式(2)は、式(6)であり、式(3)は、式(7)とするとよい。これにより、確実に、制御を収束させることができる。
【0020】
【数6】
【0021】
【数7】
【0022】
また、前記安定化係数mは1より大きな値に設定され、前記位相乗算係数qは前記安定化係数mより大きな値に設定されるようにするとよい。ここで、q≦mの場合には、振幅フィルタ係数a(n)が収束値よりも大きな値となるおそれがある。つまり、振幅フィルタ係数a(n)がオーバーシュートするおそれがある。しかし、位相乗算係数qを安定化係数mより大きくすることで、位相を早期に収束させることができるため、オーバーシュートの発生を抑制できる。
【0023】
また、前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)に基づき設定されるようにしてもよい。ここで、位相フィルタ係数の初期値φ(0)について説明する。能動型振動騒音抑制装置は、適応フィルタを更新して適応制御を行っている。仮に発生源の振動または騒音が一定である場合には、適応制御を実行することで、徐々に制御が収束する。そうすると、評価点における振動または騒音が小さい状態を維持する。このとき、正弦波制御信号y(n)の適応フィルタも収束した状態となる。ただし、実際の制御においては、適応フィルタは僅かに変動するため、完全な一定値でない場合がある。そこで、適応フィルタが変動誤差を考慮した所定範囲に継続して含まれる状態になった場合に、適応フィルタが収束したと判定できる。
【0024】
そして、制御の開始においてサンプリング時刻nが0になる場合や、演算処理上サンプリング時刻nが0となる場合がある。n=0のときの適応フィルタ係数の初期値を何らかの値として設定する必要がある。ここで、従来では、一般的に、適応フィルタ係数の初期値はゼロとして、徐々に適応させていく処理がされていた。
【0025】
これに対して、上述したように、適応フィルタ係数としての位相フィルタ係数の初期値φ(0)を、単にゼロに設定するのではなく、前回収束した時の位相フィルタ係数φ(last)に基づき設定している。このとき、前回収束した時の位相フィルタ係数φ(last)は、前回収束した時点における伝達関数Gの位相を考慮した値となっていると考えられる。つまり、位相フィルタ係数の初期値φ(0)は、現在の伝達関数Gの経年変化に追従していると言える。従って、制御が発散することを抑制でき、最終的に制御を収束させることができる。
【0026】
前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)としてもよい。これにより、位相フィルタ係数の初期値φ(0)を簡易に決定することができ、上記効果を奏することができる。
【0027】
また、前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)、前回収束した時の周波数f、および、現在の周波数fに基づき設定されるようにしてもよい。これにより、前回収束した時の周波数fと現在の周波数fが変化した場合であっても、周波数fに応じた位相フィルタ係数の初期値φ(0)を設定できる。その結果、早期に収束させることができる。
【0028】
この場合、前記振幅フィルタ係数の初期値a(0)は、現在の周波数fに基づき設定されるようにしてもよい。これにより、早期に収束させることができる。
【0029】
また、前記振幅更新項Δa(n+1)のステップサイズパラメータは、前回収束した時の前記振幅フィルタ係数a(last)に基づき設定されるようにしてもよい。従来、振幅更新項Δa(n+1)のステップサイズパラメータは、従来は一定値に設定されることが一般的であった。これに対して、本発明によれば、振幅更新項Δa(n+1)のステップサイズパラメータを前回収束した時の振幅フィルタ係数a(last)に基づいて設定することで、早期に収束させることができる。
【0030】
また、伝達関数Gの振幅も、位相と同様に、経年によって変化することがある。そして、前回収束した時の振幅フィルタ係数a(last)は、前回収束した時点における伝達関数Gの振幅を考慮した値となっていると考えられる。つまり、振幅更新項Δa(n+1)のステップサイズパラメータは、現在の伝達関数Gの経年変化に追従していると言える。従って、確実に早期に収束させることができる。
【0031】
また、前記能動型振動騒音抑制装置は、エンジンを有する車両に適用され、前記振幅更新項Δa(n+1)のステップサイズパラメータは、前回収束した時の前記振幅フィルタ係数a(last)を、前記エンジンの駆動トルク変動量trq(last)で除した値(割った値)の比例値に設定されるようにしてもよい。
【0032】
ここで、エンジンを振動または騒音の発生源とした場合には、エンジンから評価点に伝達される振動または騒音は、エンジンの駆動トルク変動量trqに比例する。つまり、制御が収束している状態において、制御信号を出力してから評価点までの伝達関数Gの振幅は、振幅フィルタ係数a(last)を、駆動トルク変動量trq(last)で除した値に対応する。そして、上記したように、振幅更新項Δa(n+1)のステップサイズパラメータに、前回収束した時の振幅フィルタ係数a(last)を前回収束した時の駆動トルク変動量trq(last)で除した値の比例値を設定することで、当該ステップサイズパラメータが、前回収束した時の伝達関数Gの振幅に対応する。従って、確実に早期に収束させることができる。
【図面の簡単な説明】
【0033】
【図1】第一実施形態:能動型振動騒音抑制装置を示す制御ブロック図である。
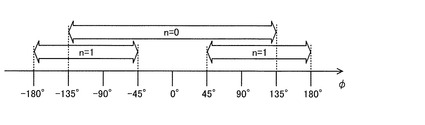
【図2】式(48)において、q=p=3、かつ、(3ΦG−ΦhG)=0の場合に、n=0,1のそれぞれにおける位相フィルタ係数φ(t)の範囲を示す。
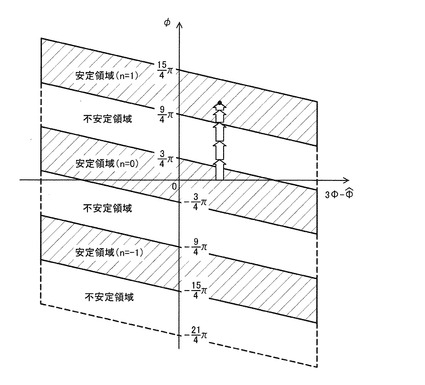
【図3】式(48)において、q=p=3の場合に、n=−1,0,1のときの安定領域および不安定領域を示す。横軸は、(3ΦG−ΦhG)であり、縦軸は、φである。
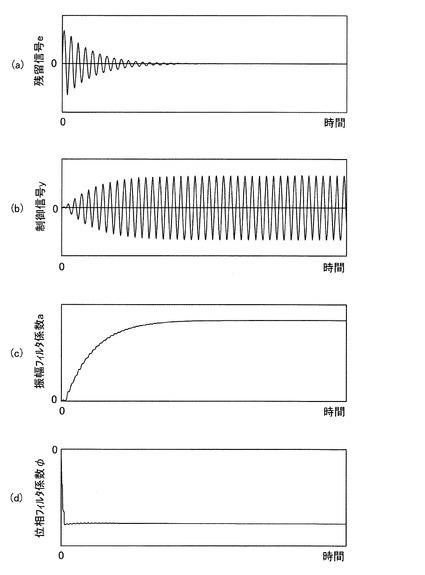
【図4】第一伝達関数Gの位相成分ΦGと第一推定伝達関数Ghの位相成分ΦhGの位相差が150°の場合の解析結果を示す。(a)は残留信号を示し、(b)は正弦波制御信号を示し、(c)は振幅フィルタ係数を示し、(d)は位相フィルタ係数を示す。
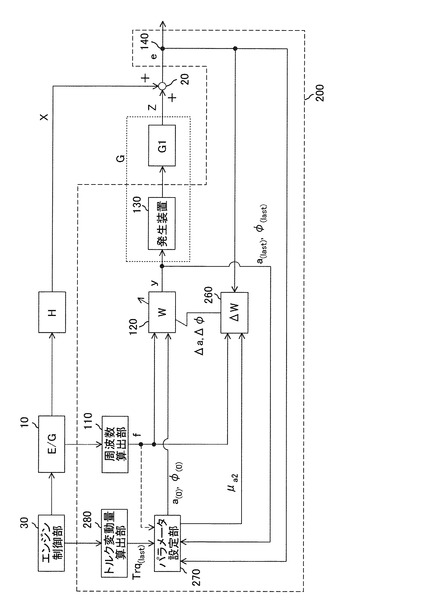
【図5】第二実施形態:能動型振動騒音抑制装置を示す制御ブロック図である。
【発明を実施するための形態】
【0034】
<第一実施形態>
(1.能動型振動騒音抑制装置の概要)
能動型振動騒音抑制装置100の概要について説明する。能動型振動騒音抑制装置100は、種々の発生源が振動または騒音を発生する場合に、所望の位置(評価点)において抑制対象の振動または騒音を能動的に抑制するために、正弦波制御信号y(n)に応じた制御振動または制御音を発生させる装置である。つまり、抑制対象の振動または騒音に対して制御振動または制御音を合成させることで、所定位置(評価点)において、制御振動または制御音が抑制対象の振動または騒音を打ち消すように作用する。その結果、評価点において、抑制対象の振動または騒音が抑制されることになる。
【0035】
ここで、自動車を例にあげて説明する。自動車において、エンジン(内燃機関)が振動騒音発生源となり、エンジンによって発生した振動や騒音が車室内に伝達されないようにすることが望まれる。そこで、エンジンによって発生した振動または騒音を能動的に抑制するために、発生装置によって制御振動または制御音を発生させる。なお、以下において、能動型振動騒音抑制装置は、自動車に適用し、エンジンによって発生される振動または騒音を抑制する装置を例に挙げて説明するが、これに限られるものではない。抑制すべき振動や騒音を発生するものであれば、全てに適用できる。
【0036】
また、能動型振動騒音抑制装置による適応制御アルゴリズムは、適応最小平均自乗フィルタ(Filtered-X LMS)、特にDXHSアルゴリズムを用いる。つまり、当該装置は、適応フィルタ係数W(n)としての振幅フィルタ係数a(n),位相フィルタ係数φ(n)を算出し、当該フィルタ係数a(n),φ(n)をおよびエンジンの振動または騒音の角周波数ωを用いて正弦波制御信号y(n)を生成し、正弦波制御信号y(n)に応じた制御振動または制御音を出力して、評価点20における振動または騒音を能動的に抑制する装置である。
【0037】
(2.能動型振動騒音抑制装置の詳細構成)
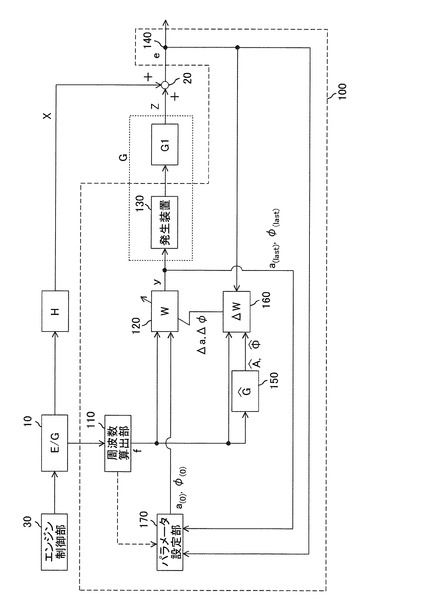
能動型振動騒音抑制装置100の詳細構成について、図1を参照して説明する。能動型振動騒音抑制装置100は、上述したように、DXHSアルゴリズムを用いた適応制御を適用する。そして、図1に示すように、能動型振動騒音抑制装置100は、エンジン制御部30によりエンジン(図1においては、「E/G」と記載)10が駆動されているとき、エンジン10によって発生される抑制対象の振動または騒音が第二伝達関数Hを介して評価点20に伝達する場合に、評価点20における振動または騒音を低減するための装置である。
【0038】
能動型振動騒音抑制装置100は、周波数算出部110と、制御信号生成部120と、発生装置130と、残留信号検出部140と、第一推定伝達関数設定部(以下、「Ghデータ設定部」と称する)150と、適応フィルタ係数更新部160と、パラメータ設定部170とを備えている。なお、数式および図面において、推定値を意味する「^」を用いるが、明細書の本文においては記載の都合上、推定値「ハット(^)」は「h」と記載する。以下に、能動型振動騒音抑制装置100の各構成について説明する。
【0039】
周波数算出部110は、エンジン10の回転数を検出する回転検出器(図示せず)から周期性のパルス信号を入力し、当該パルス信号に基づいて、エンジン10が発生する振動または騒音(抑制対象振動等)の主成分の周波数fを算出する。なお、この周波数fに2πを乗算した値は、角周波数ωとなる。つまり、周波数算出部110は、角周波数ωを算出することもできる。
【0040】
制御信号生成部120は、正弦波制御信号y(n)を生成する。正弦波制御信号y(n)は、式(8)のように表される。ここで、添字の(n)は、サンプリング数(時間ステップ)を表す添字である。つまり、式(8)および式(9)より明らかなように、正弦波制御信号y(n)は、角周波数ωと、適応フィルタ係数W(n)としての振幅フィルタ係数a(n)および位相フィルタ係数φ(n)とを構成成分に含む、時刻t(n)における信号である。
【0041】
【数8】
【0042】
ここで、式(8)における角周波数ωは、周波数算出部110により算出された周波数fに基づいて算出した値、または、周波数算出部110にて算出した値である。従って、正弦波制御信号y(n)は、エンジン10による振動または騒音の主成分の周波数fに応じた値となる。さらに、式(8)に示すように、周期関数(sin関数)の位相として、位相フィルタ係数φ(n)に対して1より大きな位相乗算係数qを乗算した値を、ωt(n)に加算するようにする。また、式(8)における振幅フィルタ係数a(n)および位相フィルタ係数φ(n)は、式(9)に示すように、DXHSアルゴリズムにおける適応フィルタ係数W(n)であり、適応的に更新される。
【0043】
【数9】
【0044】
この適応フィルタ係数W(n)の更新式は、式(10)にて表される。このように、適応フィルタ係数W(n+1)は、前回値W(n)に対して更新項ΔW(n+1)を加減算して更新される。そして、更新項ΔW(n+1)は、後述する適応フィルタ係数更新部160によって適応的に決定される。
【0045】
【数10】
【0046】
この式(10)を、振幅フィルタ係数a(n)と位相フィルタ係数φ(n)のそれぞれで表した場合には、式(11)および式(12)のようになる。つまり、式(11)に示すように、振幅フィルタ係数a(n+1)は、前回更新された振幅フィルタ係数a(n)に対して振幅更新項Δa(n+1)を加減算して更新される。また、式(12)に示すように、位相フィルタ係数φ(n+1)は、前回更新された位相フィルタ係数φ(n)に対して位相更新項Δφ(n+1)を加減算して更新される。
【0047】
【数11】
【0048】
【数12】
【0049】
ここで、振幅フィルタ係数の初期値a(0)および位相フィルタ係数φ(0)は、後述するパラメータ設定部170にて設定される。ここで、サンプリング時刻nは、エンジン10を始動することによりリセットされるようにしてもよい。この場合、サンプリング時刻nがゼロ(0)となる場合とは、エンジン10を始動したときとなる。この他に、演算処理において、nが取り得る最大値n(max)に到達したときにも、n=0となる。
【0050】
発生装置130は、実際に振動や音を発生する装置である。この発生装置130は、制御信号生成部120によって生成された正弦波制御信号y(n)に基づいて駆動する。例えば、制御振動を発生させる発生装置130は、例えば、車両の駆動系に連結されるフレームやサスペンションメンバなどのサブフレームに配置される振動発生装置である。また、制御音を発生させる発生装置130は、例えば、車室内に配置されるスピーカー等である。発生装置130が例えばソレノイドやボイスコイルなどのように磁力を用いて制御振動や制御音を発生させる装置の場合には、コイル(図示せず)に供給する電流、電圧または電力を、各時刻t(n)における正弦波制御信号y(n)に応じるように駆動することで、発生装置130が正弦波制御信号y(n)に応じた制御振動または制御音を発生する。
【0051】
そうすると、評価点20においては、発生装置130によって発生された制御振動または制御音が伝達系G1を介して伝達された制御振動または制御音Z(n)が、エンジン10によって発生された抑制対象の振動または騒音が第二伝達関数Hを介して伝達された振動騒音X(n)に対して干渉する。
【0052】
そこで、残留信号検出部140は、評価点20に配置されており、評価点20において干渉による残留振動または残留騒音(本発明における「残留信号」に相当する)e(n)を検出する。この残留信号e(n)は、式(13)で表される。例えば、残留振動を検出する残留信号検出部140としては、加速度センサなどを適用できる。また、残留音を検出する残留信号検出部140としては、吸音マイクなどを適用できる。残留信号検出部140によって検出される残留信号e(n)がゼロになることが理想状態である。
【0053】
【数13】
【0054】
ここで、第一伝達関数Gは、制御信号生成部120と評価点20との間の伝達系の伝達関数である。つまり、第一伝達関数Gは、発生装置130そのものの伝達関数と、発生装置130と評価点20との間の伝達系G1の伝達関数とを含む。そして、第一伝達関数Gは、周波数fに応じた振幅成分AGと位相成分ΦGとにより表される。また、第二伝達関数Hは、エンジン10と評価点20との間の伝達系の伝達関数である。つまり、第二伝達関数Hは、振幅成分AHと位相成分ΦHとにより表される。そうすると、式(13)は、式(14)のように表される。
【0055】
【数14】
【0056】
Ghデータ設定部150には、公知の伝達関数同定処理により算出された第一推定伝達関数Gh(第一伝達関数Gの推定値)が記憶されている。そして、第一伝達関数Gは、周波数fに応じた振幅成分AGと位相成分ΦGとにより表される。そこで、式(15)に示すように、第一推定伝達関数Ghとしては、周波数fに応じた振幅成分AhGと位相成分ΦhGとにより表される。なお、式(15)においては、第一推定伝達関数Gh、振幅成分AhGおよび位相成分ΦhGは、周波数fに応じたものとなるため、fの関数であることを明記するために、それぞれGh(f)、AhG(f)およびΦhG(f)と記載している。
【0057】
【数15】
【0058】
そして、Ghデータ設定部150は、記憶されている第一推定伝達関数Ghの中から、周波数算出部110にて算出された周波数fに応じた第一推定伝達関数Ghを選択する。つまり、Ghデータ設定部150は、周波数算出部110にて算出された周波数fに応じた振幅成分AhGおよび位相成分ΦhGを決定する。
【0059】
適応フィルタ係数更新部160(本発明の「振幅フィルタ係数更新部」および「位相フィルタ係数更新部」に相当する)は、残留信号e(n)が小さくなるように、制御信号生成部120にて生成される適応フィルタ係数W(n)に対して加減算するための更新項ΔW(n+1)を算出する。適応フィルタ係数W(n)は、上述したように、振幅フィルタ係数a(n)と位相フィルタ係数φ(n)とにより構成される。つまり、適応フィルタ係数更新部160は、振幅フィルタ係数a(n)に対して加減算するための振幅更新項Δa(n+1)、および、位相フィルタ係数φ(n)に対して加減算するための位相更新項Δφ(n+1)を算出する。
【0060】
この適応フィルタ係数更新部160は、残留信号e(n)に基づき設定された評価関数J(n)を最小とするように適応フィルタ係数W(n)の更新項ΔW(n+1)を算出する。また、DXHSアルゴリズムを適用するため、適応フィルタ係数更新部160は、更新項ΔW(n+1)の算出に際して、周波数算出部110により算出された周波数f(または角周波数ω)、並びに、Ghデータ設定部150により決定された第一推定伝達関数Ghの振幅成分AhGおよび位相成分ΦhGを用いる。
【0061】
以下に、適応フィルタ係数更新部160において、適応フィルタ係数W(n)の更新項ΔW(n+1)の導き方について説明する。評価関数J(n)を式(16)のように定義する。つまり、評価関数J(n)は、残留信号検出部140により検出される残留信号e(n)の二乗とする。つまり、評価関数J(n)が最小となるような正弦波制御信号y(n)を求める。
【0062】
【数16】
【0063】
次に、LMSアルゴリズムにおける勾配ベクトル▽(n)を式(17)に従って算出する。勾配ベクトル▽(n)は、評価関数J(n)を適応フィルタ係数W(n)で偏微分して得られる。そうすると、勾配ベクトル▽(n)は、式(17)の右辺のように表される。
【0064】
【数17】
【0065】
そして、式(18)に示すように、算出した勾配ベクトル▽(n)にステップサイズパラメータμを乗じた項を、更新項ΔW(n+1)とする。
【0066】
【数18】
【0067】
式(10)と式(18)より、適応フィルタ係数W(n)の更新式は、式(19)のように表される。
【0068】
【数19】
【0069】
ここで、適応フィルタ係数W(n)は、上述したように、振幅フィルタ係数a(n)と位相フィルタ係数φ(n)とにより構成される。そして、式(14)における第一伝達関数Gの振幅成分AGと位相成分ΦGとのそれぞれを第一推定伝達関数Ghの振幅成分AhGおよび位相成分ΦhGに置き換えて、式(19)を演算する。そうすると、振幅フィルタ係数a(n)に対する振幅更新項Δa(n+1)は、式(20)のように表され、位相フィルタ係数φ(n)に対する位相更新項Δφ(n+1)は、式(21)のように表される。ここで、式(20)の(1/AhG)は、振幅フィルタ係数a(n)の更新に対して正規化処理を加えたものである。
【0070】
【数20】
【0071】
【数21】
【0072】
ここで、式(20)(21)によりの更新項を適用した場合には、第一伝達関数Gの位相成分ΦGと第一推定伝達関数Ghの位相成分ΦhGとのずれが、−90°〜90°の範囲であれば、制御を収束させることができる。しかし、位相のずれが−90°〜90°の範囲を超えると、制御の不安定領域となり、制御が発散するおそれがある。そこで、式(20)および式(21)を、式(22)および式(23)に置き換える。つまり、式(22)(23)は、式(20)(21)の更新項の式において位相乗算係数qを削除したものとする。ただし、式(8)に示す正弦波制御信号y(n)における位相乗算係数qはそのまま残しておく。このようにすることで、制御が発散することなく、収束させることができる。この理論については、後述する。
【0073】
【数22】
【0074】
【数23】
【0075】
さらに、確実に収束させるために、式(22)および式(23)を式(24)および式(25)に置き換える。つまり、それぞれの更新項の式において、前回更新された位相フィルタ係数φ(n)に対して、1より大きな値である安定化係数mにより除算する。ただし、位相乗算係数qは、安定化係数mより大きな値とする。さらに、それぞれの更新項の式において、第一推定伝達関数Ghの位相成分ΦhGに対して任意の係数pにより除算する。この係数pは、1を含み、1以外の数であってもよい。このようにすることで、確実に収束させることができる。
【0076】
【数24】
【0077】
【数25】
【0078】
そうすると、振幅フィルタ係数a(n)の更新式は式(26)のように表され、位相フィルタ係数φ(n)の更新式は式(27)のように表される。
【0079】
【数26】
【0080】
【数27】
【0081】
このようにして、適応フィルタ係数更新部160は、振幅フィルタ係数a(n)に対する振幅更新項Δa(n+1)、および、位相フィルタ係数φ(n)に対する位相更新項Δφ(n+1)を算出する。つまり、制御信号生成部120において、当該更新項Δa(n+1)、Δφ(n+1)を用いて正弦波制御信号y(n)を適応的に更新することができる。
【0082】
パラメータ設定部170は、制御信号生成部120において、正弦波制御信号y(0)の適応フィルタ係数W(n)としての初期値W(0)を設定する。具体的には、パラメータ設定部170は、振幅フィルタ係数の初期値a(0)および位相フィルタ係数の初期値φ(0)を設定する。ここで、初期値a(0),φ(0)におけるサンプリング時刻n=0のときとは、上述したように、例えば、エンジン10を始動したときなどとする。この場合、サンプリング時刻nは、エンジン10が始動してからエンジン10が停止するまでの間増加していく。この他に、演算処理において、nが取り得る最大値n(max)に到達したときにも、n=0となる。
【0083】
まず、振幅フィルタ係数の初期値a(0)は、式(28)に示すように、0とする。位相フィルタ係数の初期値φ(0)は、式(29)に示すように、前回収束した時の位相フィルタ係数φ(last)としている。なお、式(29)では、初期値φ(0)を前回収束した時の位相フィルタ係数φ(last)としているが、当該位相フィルタ係数φ(last)の比例値などとしてもよい。
【0084】
【数28】
【0085】
【数29】
【0086】
ここで、パラメータ設定部170は、初期値φ(0)として用いる位相フィルタ係数φ(last)を以下のようにして取得して記憶している。残留信号検出部140により検出された残留信号e(n)を常に取得しており、残留信号e(n)の絶対値がゼロに近い設定値以下となるか否かを判定し、制御が収束したか否かを判定する。制御が収束したか否かの判定は、残留信号e(n)の他に、振幅フィルタ係数a(n)の振幅更新項Δa(n+1)または位相フィルタ係数φ(n)の位相更新項Δφ(n+1)の絶対値がゼロに近い設定値以下となるか否かにより判定することもできる。そして、パラメータ設定部170は、制御が収束したと判定されたときの位相フィルタ係数φ(last)を制御信号生成部120から取得する。パラメータ設定部170は、このようにして取得した前回収束した時の位相フィルタ係数φ(last)を記憶している。
【0087】
ここで、上記式(28)においては、振幅フィルタ係数の初期値a(0)を常に0とした。この他に、振幅フィルタ係数の初期値a(0)を周波数fに応じた値に設定することもできる。この場合、例えば、パラメータ設定部170が、周波数fに応じた振幅フィルタ係数の初期値a(0)に関するマップを記憶しておき、現在の周波数fと当該マップに記憶されている情報とに基づいて振幅フィルタ係数の初期値a(0)を設定する。このように現在の周波数fに応じた振幅フィルタ係数の初期値a(0)を設定することで、早期の収束を実現できる。
【0088】
また、上記式(29)においては、位相フィルタ係数の初期値φ(0)は、前回収束した時の位相フィルタ係数φ(last)とした。この他に、位相フィルタ係数の初期値φ(0)は、周波数fに応じた値に設定することもできる。この場合、位相フィルタ係数の初期値φ(0)は、前回収束した時の位相フィルタ係数φ(last)と前回収束した時の周波数fを記憶しておき、前回収束した時の周波数fを現在の周波数fに変換するための係数を前回収束した時の位相フィルタ係数φ(last)に乗算した値としてもよい。例えば、パラメータ設定部170が、周波数fに応じた位相フィルタ係数の変換係数(比例係数)に関するマップを記憶しておき、前回収束した時の位相フィルタ係数φ(last)に当該変換係数を乗算した値を位相フィルタ係数の初期値φ(0)とする。このように現在の周波数fに応じた位相フィルタ係数の初期値φ(0)を設定することで、早期の収束を実現できる。
【0089】
このように、パラメータ設定部170が周波数fに基づきそれぞれの初期値を設定する場合には、図1において、周波数算出部110からパラメータ設定部170への情報の伝達が行われる。すなわち、図1において、周波数算出部110からパラメータ設定部170への破線の矢印により表される。なお、上記したように周波数fに応じない初期値を設定する実施形態においては、周波数算出部110からパラメータ設定部170への情報の伝達は行われないため、図1において破線の矢印にて図示した。
【0090】
(2.理論説明)
次に、上述したように振幅フィルタ係数a(n)に対する振幅更新項Δa(n+1)、および、位相フィルタ係数φ(n)に対する位相更新項Δφ(n+1)を更新する場合の理論説明を行う。上述したDXHSアルゴリズムの基本式は、式(14)、式(22)および式(23)を連続時間で表記すると、式(30)のように表される。ただし、実際には、式(22)(23)ではなく、式(24)(25)を適用していることは、上述したとおりである。なお、以下において、(t)は、時刻tの関数を表す。また、φimag(t)=q×φ(t)と定義し、μφ11=q×μφ1と定義している。
【0091】
【数30】
【0092】
ここで、式(30)において、より簡易的にするために、振幅成分AGおよびAhGを省略して、更新項da/dtを正規化前に戻す。そうすると、式(30)は式(31)のように表される。
【0093】
【数31】
【0094】
制御が安定している場合を考えると、t→∞のときにe2→0となればよい。つまり、tが十分に大きい場合に、式(32)を満たしていれば、制御が安定保証される。
【0095】
【数32】
【0096】
そこで、式(31)の第一式より、式(33)のように表される。
【0097】
【数33】
【0098】
式(33)に式(31)の第二式および第三式を代入して展開すると、式(34)のようになる。
【0099】
【数34】
【0100】
ここで、式(34)の右辺の第一項に式(31)の第一式を代入して計算すると、式(35)のようになる。また、式(34)の右辺の第三項に式(31)の第一式を代入して計算すると、式(36)のようになる。
【0101】
【数35】
【0102】
【数36】
【0103】
そして、式(35)と式(36)を加算すると、式(37)となる。
【0104】
【数37】
【0105】
ここで、式(34)の右辺の第二項を計算すると、式(38)のようになる。また、式(34)の右辺の第四項を計算すると、式(39)のようになる。
【0106】
【数38】
【0107】
【数39】
【0108】
そして、式(38)と式(39)を加算すると、式(40)となる。
【0109】
【数40】
【0110】
式(37)および式(40)より、式(34)は、式(41)のように表される。
【0111】
【数41】
【0112】
ここで、式(41)において、第五項目以外は全て2ωの周期関数となっている。そして、t→∞のときに制御が収束している状態を考えるため、t→∞のときにe(t)、a(t)、φ(t)が一定値に収束することになる。そうすると、t→∞のときに、式(41)の第一項から第四項までの周期関数の和が一定値にならなければならない。ただし、一定値は、ゼロとは限らず、ゼロ以外の値であってもよい。
【0113】
そして、上記の一定値を導き出すために、それぞれの周期関数の平均値を算出する。式(41)の第一項から第四項までの周期関数は、全て2ωの関数であり、時間が十分に経過していると仮定すると、それぞれの周期関数の平均値はゼロとなる。このことは、式(42)より導き出すことができる。ここで、Tは周期を表す。
【0114】
【数42】
【0115】
従って、式(41)の第一項から第四項までの周期関数の和の収束値は、ゼロと推定できる。そうすると、式(41)において、第五項のみを検討すれば足りる。そこで、式(32)および式(41)の第五項より、制御が安定保証されるためには、少なくとも式(43)の条件を満たしている必要がある。
【0116】
【数43】
【0117】
ここで、式(44)より、式(45)の条件が必要となる。
【0118】
【数44】
【0119】
【数45】
【0120】
式(45)より、式(46)の条件が必要となる。ただし、nは整数である。
【0121】
【数46】
【0122】
そして、現在、q>1であり、pは任意係数であるため、式(46)は式(47)のように展開することができる。つまり、t→∞の時に、式(47)を満たすような位相フィルタ係数φ(t)を設定することで、制御が発散しない。
【0123】
【数47】
【0124】
ここで、本実施形態とは異なる一般的なDXHSアルゴリズムの場合には、式(45)においてq=1の場合となる。このとき、実際の第一伝達関数Gの位相成分ΦGと第一推定伝達関数Ghの位相成分ΦhGとの位相ずれが−90°〜90°の範囲であれば、q=1とした式(45)の条件を満たす。つまり、位相ずれが−90°〜90°の範囲のときに安定性が保証される。しかしながら、q=1の場合には、−90°〜90°の範囲外になると、制御が発散する。これに対して、本実施形態においては、q>1であるため、上述したように、式(47)を満たせば、制御が収束する。例えば、q=3とし、p=3とした場合には、式(47)は式(48)となる。
【0125】
【数48】
【0126】
式(48)において、伝達関数位相差(3ΦG−ΦhG)=0の場合、位相フィルタ係数φ(t)の範囲は、n=0のときに−135°〜+135°となり、n=1のときに+405°〜+675°、すなわち+45°〜−45°となる。この範囲を−180°〜+180°の範囲で示すと図2に示すようになる。つまり、n=0,1とした場合には、n=0とn=1の2つの場合におけるトータルの位相フィルタ係数φ(t)は360°全範囲を選択することができる。また、n=−1のときには−675°〜−405°、すなわち+45°〜−45°となる。つまり、n=0,−1とした場合にも、上記同様となる。
【0127】
次に、伝達関数位相差(3ΦG−ΦhG)が0以外の場合についても考える。この場合、式(48)において、n=−1,0,1とした場合に、それぞれの安定領域と不安定領域は図3に示すようになる。この関係から、位相フィルタ係数φ(t)の範囲をどの範囲で設定可能とすればよいかを検討する。
【0128】
q=p=3の場合には、n=0,1の位相フィルタ係数φ(t)は360°のどこでも選択でき、かつ、伝達関数位相差−720°<(3ΦG−ΦhG)<+720°である。つまり、n=0、かつ、(3ΦG−ΦhG)=−720°のときに、+225°<φ(t)<+495°となる。n=1、かつ、(3ΦG−ΦhG)=−720°のときに、+765°<φ(t)<+1035°となる。n=0、かつ、(3ΦG−ΦhG)=+720°のときに、−495°<φ(t)<−225°となる。n=1、かつ、(3ΦG−ΦhG)=+720°のときに、45°<φ(t)<315°となる。これらの範囲から、−495°<φ(t)<+1035°としておけば、制御が発散しない、すなわち制御が収束するようにできる。また、q=p=3で、n=0,−1とした場合には、上記と同様な考え方により、−1035°<φ(t)<+495°としておけば、制御が発散しない。
【0129】
(解析)
次に、上記実施形態について、第一伝達関数Gの位相成分ΦGと第一推定伝達関数Ghの位相成分ΦhGとの位相差が180°の場合であり、位相乗算係数q=3,m=2とした場合について解析を行った。この解析結果を図4に示す。図4(a)に示すように、残留信号eが収束していることが分かる。このときの正弦波制御信号yは図4(b)に示すとおりである。そして、図4(c)(d)に示すように、振幅フィルタ係数aおよび位相フィルタ係数φがそれぞれ収束していることが分かる。特に、図4(d)に示すように、位相フィルタ係数φが振幅フィルタ係数aに比べて早期に収束していることが分かる。
【0130】
このように、位相差が180°であったとしても、最終的に制御を発散させることなく、かつ、早期に収束させることができる。従って、第一伝達関数Gが温度や経年によって変化することによって第一伝達関数Gの位相成分と第一推定伝達関数Ghの位相成分とがずれたとしても、制御を早期に収束させることができる。さらに、第一推定伝達関数Ghを用いることで、第一推定伝達関数Ghの精度が高い場合には、早く収束させることができる。さらに、振幅フィルタ係数aは、収束値よりも大きな値となることなく、収束している。つまり、振幅フィルタ係数aがオーバーシュートしていない。従って、収束するまでの間、振動が大きくなることを抑制できる。
【0131】
また、上述したように、位相フィルタ係数の初期値φ(0)を、単にゼロに設定するのではなく、前回収束した時の位相フィルタ係数φ(last)に基づき設定している。このとき、前回収束した時の位相フィルタ係数φ(last)は、前回収束した時点における伝達関数Gの位相を考慮した値となっていると考えられる。つまり、位相フィルタ係数の初期値φ(0)は、現在の伝達関数Gの経年変化に追従していると言える。従って、制御が発散することを抑制でき、最終的に制御を収束させることができる。
【0132】
ここで、上記実施形態において、位相フィルタ係数の初期値φ(0)を、単にゼロに設定することもできる。このようにしたとしても、制御が発散せずに収束させることができるという効果を奏することはできる。しかし、この場合には、位相フィルタ係数の初期値φ(0)を前回収束した時の位相フィルタ係数φ(last)に基づき設定する場合に比べて、早期収束の効果は劣る。
【0133】
<第二実施形態>
本実施形態の能動型振動騒音抑制装置200について、図5を参照して説明する。第一実施形態においては、適応フィルタ係数Wの更新式において、第一伝達関数Gの推定値Ghを用いた。これに対して、本実施形態の能動型振動騒音抑制装置200は、適応フィルタ係数Wの更新式において、第一伝達関数Gの推定値Ghを用いない。
【0134】
能動型振動騒音抑制装置200は、周波数算出部110と、制御信号生成部120と、発生装置130と、残留信号検出部140と、適応フィルタ係数更新部260と、トルク変動量算出部280と、パラメータ設定部270を備えている。ここで、第一実施形態と同一構成については、同一符号を付して説明を省略する。つまり、本実施形態の能動型振動騒音抑制装置200は、第一実施形態に対して、適応フィルタ係数更新部260、トルク変動量算出部280、パラメータ設定部270が相違する。
【0135】
適応フィルタ係数更新部260(本発明の「振幅フィルタ係数更新部」および「位相フィルタ係数更新部」に相当する)は、第一実施形態と同様に、残留信号e(n)が小さくなるように、制御信号生成部120にて生成される適応フィルタ係数W(n)に対して加減算するための更新項ΔW(n+1)を算出する。この適応フィルタ係数更新部260は、振幅フィルタ係数a(n)に対して加減算するための振幅更新項Δa(n+1)、および、位相フィルタ係数φ(n)に対して加減算するための位相更新項Δφ(n+1)を算出する。
【0136】
ここで、第一実施形態における振幅更新項Δa(n+1)は式(24)に示すとおりである。式(24)において、(μa1/AhG)を第一推定伝達関数Ghの振幅成分AhGに依存しない一定の振幅用ステップサイズパラメータμa2とし、かつ、(ΦhG/p)をゼロとする。そうすると、振幅更新項Δa(n+1)は式(49)のように表される。つまり、式(49)で表される振幅更新項Δa(n+1)は、第一推定伝達関数Ghに依存しない更新項となる。ここで、振幅用ステップサイズパラメータμa2は、後述するが、パラメータ設定部270により、前回収束した時の振幅フィルタ係数a(last)を用いて変更される。
【0137】
【数49】
【0138】
また、第一実施形態における位相更新項Δφ (n+1)は式(25)に示すとおりである。式(25)において、(ΦhG/p)をゼロとする。そうすると、位相更新項Δφ(n+1)は式(50)のように表される。つまり、式(50)で表される位相更新項Δφ(n+1)は、第一推定伝達関数Ghに依存しない更新項となる。
【0139】
【数50】
【0140】
トルク変動量算出部280は、エンジン制御部30からエンジン10の駆動トルク変動量trq(n)に関する情報を受け取り、エンジン10の駆動トルク変動量trq(n)を算出する。例えば、駆動トルク変動量trq(n)に関する情報とは、駆動トルク変動量trq(n)そのもの、アクセル開度の変化量などである。
【0141】
パラメータ設定部270は、第一実施形態と同様に、振幅フィルタ係数の初期値a(0)および位相フィルタ係数の初期値φ(0)を、式(28)(29)に示すように設定する。さらに、パラメータ設定部270は、前回収束した時の振幅フィルタ係数a(last)と、前回収束した時の駆動トルク変動量trq(last)とを用いて、式(51)に従って、振幅用ステップサイズパラメータμa2を設定する。式(51)に示すように、振幅用ステップサイズパラメータμa2は、前回収束した時の振幅フィルタ係数a(last)を、駆動トルク変動量trq(last)で除した値(割った値)に、一定のステップサイズパラメータμa3を乗じた値とする。
【0142】
【数51】
【0143】
ここで、第一実施形態にて説明したように、位相フィルタ係数φ(n)は、360°全範囲を選択したとしても、制御を収束させることができる。そのため、式(24)(25)において、周期関数(sin関数またはcos関数)の位相成分において、第一推定伝達関数Ghの位相成分ΦhGを用いないとしても、位相フィルタ係数φ(n)の値によって制御が発散するということがない。そこで、式(49)(50)のように当該位相成分ΦhGを用いない更新式としたとしても、制御を収束させることができる。
【0144】
また、式(49)において、第一推定伝達関数Ghの振幅成分AhGを用いないが、振幅更新項Δa(n+1)の振幅用ステップサイズパラメータμa2が、前回収束した時の振幅フィルタ係数a(last)に基づいている。ここで、前回収束した時の振幅フィルタ係数a(last)は、前回収束した時点における伝達関数Gの振幅を考慮した値となっていると考えられる。つまり、振幅更新項Δa(n+1)の振幅用ステップサイズパラメータμa2は、現在の伝達関数Gの経年変化に追従していると言える。
【0145】
特に、式(51)に示すように、振幅用ステップサイズパラメータμa2は、前回収束した時の振幅フィルタ係数a(last)を、駆動トルク変動量trq(last)で除した値の比例値に設定するようにしている。ここで、エンジン10を振動または騒音の発生源とした場合には、エンジン10から評価点20に伝達される振動または騒音は、エンジン10の駆動トルク変動量trqに比例する。つまり、制御が収束している状態において、第一伝達関数Gの振幅は、振幅フィルタ係数a(last)を駆動トルク変動量trq(last)で除した値に対応する。
【0146】
そして、上記したように、振幅更新項Δa(n+1)の振幅用ステップサイズパラメータμa2に、前回収束した時の振幅フィルタ係数a(last)を前回収束した時の駆動トルク変動量trq(last)で除した値の比例値を設定することで、当該振幅用ステップサイズパラメータμa2が、前回収束した時の第一伝達関数Gの振幅に対応する。従って、式(49)を適用したとしても、振幅の追従性能は劣ることなく、確実に早期に収束させることができる。
【0147】
このように、第二実施形態のように、第一推定伝達関数Ghを用いずに適応フィルタ係数Wを更新したとしても、第一実施形態と同様に確実にかつ早期に制御を収束させることができる。さらに、第一推定伝達関数Ghを用いないため、第一伝達関数Gの同定処理を行う必要がなく、かつ、同定精度を追求する必要もない。そのため、演算処理を簡易的にすることができ、かつ、演算処理負荷を低減することができる。
【0148】
ここで、上記実施形態において、振幅用ステップサイズパラメータμa2は、前回収束した時の振幅フィルタ係数a(last)に基づいて設定したが、単に一定値に設定することもできる。このようにしたとしても、制御が発散せずに収束させることができるという効果を奏することはできる。しかし、この場合には、振幅用ステップサイズパラメータμa2を前回収束した時の振幅フィルタ係数a(last)に基づいて設定する場合に比べて、振幅の追従性能が劣り、早期収束の効果は劣る。
【0149】
<第三実施形態>
上記第一実施形態において、式(22)および式(23)を式(24)および式(25)に置き換えて処理を行った。この他に、振幅フィルタ係数a(n+1)の更新項Δa(n+1)および位相フィルタ係数φ(n)の更新項Δφ(n+1)を式(22)および式(23)そのものを用いてもよい。すなわち、式(24)(25)においてm=1とした場合に相当する。この場合にも、制御を収束させることができる。
【0150】
<その他>
上記実施形態において、振幅更新項Δa(n+1)および位相更新項Δφ(n+1)は、式(24)(25)および式(49)(50)に示す更新式とした。この他に、振幅更新項Δa(n+1)および位相更新項Δφ(n+1)は、式(24)(25)または式(49)(50)に示す項に、収束安定性を高めるためなどに別の項を加減算する式としてもよい。すなわち、少なくとも、振幅更新項Δa(n+1)および位相更新項Δφ(n+1)は、式(24)(25)または式(49)(50)に示す項を含む更新式とすれば、上記効果を発揮することができる。
【符号の説明】
【0151】
10:振動騒音発生源(エンジン)、 20:評価点
100,200:能動型振動騒音抑制装置
110:周波数算出部、 120:制御信号生成部、 130:発生装置
140:残留信号検出部、 150:第一推定伝達関数設定部
160,260:適応フィルタ係数更新部、 170,270:パラメータ設定部
180:トルク変動量算出部
【技術分野】
【0001】
本発明は、適応制御を用いて、能動的に振動または騒音を抑制することができる能動型振動騒音抑制装置に関するものである。
【背景技術】
【0002】
従来、適応制御を用いて能動的に振動または騒音を抑制する装置として、特許文献1〜3に記載されたものがある。特許文献1〜3には、適応制御アルゴリズムとしてLMSアルゴリズムを適用した制御方法について記載されている。特に、特許文献1,2には、Filtered-X LMSアルゴリズムのうちDXHSアルゴリズムについて記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−44377号公報
【特許文献2】特開平8−272378号公報
【特許文献3】特開平5−61483号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、振動または騒音をより早期に収束させることができる能動型振動騒音抑制装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の能動型振動騒音抑制装置は、制御振動または制御音を出力して、評価点における振動または騒音を能動的に抑制する能動型振動騒音抑制装置であって、振動または騒音の発生源の周波数、適応フィルタ係数としての振幅フィルタ係数および位相フィルタ係数により構成される正弦波制御信号y(n)を生成する制御信号生成部と、前記正弦波制御信号y(n)に応じた前記制御振動または制御音を出力する制御振動制御音発生装置と、前記評価点において前記発生源による振動または騒音と前記制御振動または制御音との干渉による残留信号e(n)を検出する残留信号検出部と、前回更新された前記振幅フィルタ係数a(n)に対して加減算して更新するための振幅更新項Δa(n+1)を、前記残留信号e(n)が小さくなるように算出する振幅フィルタ係数更新部と、前回更新された前記位相フィルタ係数φ(n)に対して加減算して更新するための位相更新項Δφ(n+1)を、前記残留信号e(n)が小さくなるように算出する位相フィルタ係数更新部と、を備え、前記正弦波制御信号y(n)は、位相成分として前記位相フィルタ係数φ(n)に対して1より大きな値を乗算した値を含む。
【0006】
本発明によれば、正弦波制御信号y(n)の位相成分において、位相フィルタ係数更新部において更新された位相フィルタ係数φ(n)そのままの値として用いるのではなく、位相フィルタ係数φ(n)に1より大きな値を乗算した値を用いる。つまり、更新された位相フィルタ係数φ(n)に比例した値を用いている。これにより、評価点において、制御振動または制御音の位相が、発生源から伝達された振動または騒音の位相に対して早期に逆位相となるように収束させることができる。その結果、評価点における振動または騒音自体を早期に収束させることができる。
【0007】
また、前記正弦波制御信号y(n)は、式(1)にて表されるようにしてもよい。これにより、確実に上記効果を奏することができる。
【0008】
【数1】
【0009】
また、前記振幅更新項Δa(n+1)は、式(2)の項を含み、前記位相更新項Δφ(n+1)は、式(3)の項を含むようにしてもよい。
【0010】
【数2】
【0011】
【数3】
【0012】
これにより、上述した効果、すなわち評価点における振動または騒音自体を早期に収束させることができることに加えて、次の効果を奏する。すなわち、正弦波制御信号y(n)が伝達関数Gを介して評価点に伝達された場合における当該制御振動または制御音が、振動発生源から評価点に伝達された振動または騒音に対してどのような位相であったとしても、最終的に制御を発散させずに収束させることができる。なお、安定化係数mは、1でもよく、1より大きな値でもよい。
【0013】
そうすると、式(2)における振幅係数a1、位相係数φ1および式(3)における振幅係数a2、位相係数φ2は、前記制御信号生成部と前記評価点との間の伝達関数Gに依存しない係数とすることができる。振幅更新項Δa(n+1)および位相更新項Δφ(n+1)における周期関数の位相成分として、伝達関数Gに無関係な値としたとしても、最終的に制御を収束させることができる。従って、伝達関数Gを同定する必要がなく、かつ、同定精度を追求する必要もない。そのため、演算処理を簡易的にすることができ、かつ、演算処理負荷を低減することができる。
【0014】
ここで、振幅係数a2および位相係数φ2が伝達関数Gに依存しない係数とした場合には、式(2)は、式(4)であり、式(3)は、式(5)とするとよい。これにより、確実に、制御を収束させることができる。
【0015】
【数4】
【0016】
【数5】
【0017】
一方、振幅更新項Δa(n+1)および位相更新項Δφ(n+1)が伝達関数Gを用いた項とすることもできる。この場合、前記能動型振動騒音抑制装置は、前記制御信号生成部と前記評価点との間の伝達関数の推定値を予め記憶する推定伝達関数記憶部をさらに備え、式(2)における振幅係数a1と位相係数φ1の少なくとも一方、および、式(3)における振幅係数a2と位相係数φ2の少なくとも一方は、前記伝達関数の推定値に基づいて得られる係数とするとよい。
【0018】
このとき、伝達関数Gの位相成分ΦGと推定伝達関数Ghの位相成分ΦhGとが−90°〜90°の範囲外となったとしても、最終的には制御が発散せずに収束させることができる。例えば、位相差が180°であったとしても、収束させることができる。ただし、伝達関数の同定精度が高ければ、より早く収束させることができる。
【0019】
そして、推定伝達関数を用いる場合には、式(2)は、式(6)であり、式(3)は、式(7)とするとよい。これにより、確実に、制御を収束させることができる。
【0020】
【数6】
【0021】
【数7】
【0022】
また、前記安定化係数mは1より大きな値に設定され、前記位相乗算係数qは前記安定化係数mより大きな値に設定されるようにするとよい。ここで、q≦mの場合には、振幅フィルタ係数a(n)が収束値よりも大きな値となるおそれがある。つまり、振幅フィルタ係数a(n)がオーバーシュートするおそれがある。しかし、位相乗算係数qを安定化係数mより大きくすることで、位相を早期に収束させることができるため、オーバーシュートの発生を抑制できる。
【0023】
また、前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)に基づき設定されるようにしてもよい。ここで、位相フィルタ係数の初期値φ(0)について説明する。能動型振動騒音抑制装置は、適応フィルタを更新して適応制御を行っている。仮に発生源の振動または騒音が一定である場合には、適応制御を実行することで、徐々に制御が収束する。そうすると、評価点における振動または騒音が小さい状態を維持する。このとき、正弦波制御信号y(n)の適応フィルタも収束した状態となる。ただし、実際の制御においては、適応フィルタは僅かに変動するため、完全な一定値でない場合がある。そこで、適応フィルタが変動誤差を考慮した所定範囲に継続して含まれる状態になった場合に、適応フィルタが収束したと判定できる。
【0024】
そして、制御の開始においてサンプリング時刻nが0になる場合や、演算処理上サンプリング時刻nが0となる場合がある。n=0のときの適応フィルタ係数の初期値を何らかの値として設定する必要がある。ここで、従来では、一般的に、適応フィルタ係数の初期値はゼロとして、徐々に適応させていく処理がされていた。
【0025】
これに対して、上述したように、適応フィルタ係数としての位相フィルタ係数の初期値φ(0)を、単にゼロに設定するのではなく、前回収束した時の位相フィルタ係数φ(last)に基づき設定している。このとき、前回収束した時の位相フィルタ係数φ(last)は、前回収束した時点における伝達関数Gの位相を考慮した値となっていると考えられる。つまり、位相フィルタ係数の初期値φ(0)は、現在の伝達関数Gの経年変化に追従していると言える。従って、制御が発散することを抑制でき、最終的に制御を収束させることができる。
【0026】
前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)としてもよい。これにより、位相フィルタ係数の初期値φ(0)を簡易に決定することができ、上記効果を奏することができる。
【0027】
また、前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)、前回収束した時の周波数f、および、現在の周波数fに基づき設定されるようにしてもよい。これにより、前回収束した時の周波数fと現在の周波数fが変化した場合であっても、周波数fに応じた位相フィルタ係数の初期値φ(0)を設定できる。その結果、早期に収束させることができる。
【0028】
この場合、前記振幅フィルタ係数の初期値a(0)は、現在の周波数fに基づき設定されるようにしてもよい。これにより、早期に収束させることができる。
【0029】
また、前記振幅更新項Δa(n+1)のステップサイズパラメータは、前回収束した時の前記振幅フィルタ係数a(last)に基づき設定されるようにしてもよい。従来、振幅更新項Δa(n+1)のステップサイズパラメータは、従来は一定値に設定されることが一般的であった。これに対して、本発明によれば、振幅更新項Δa(n+1)のステップサイズパラメータを前回収束した時の振幅フィルタ係数a(last)に基づいて設定することで、早期に収束させることができる。
【0030】
また、伝達関数Gの振幅も、位相と同様に、経年によって変化することがある。そして、前回収束した時の振幅フィルタ係数a(last)は、前回収束した時点における伝達関数Gの振幅を考慮した値となっていると考えられる。つまり、振幅更新項Δa(n+1)のステップサイズパラメータは、現在の伝達関数Gの経年変化に追従していると言える。従って、確実に早期に収束させることができる。
【0031】
また、前記能動型振動騒音抑制装置は、エンジンを有する車両に適用され、前記振幅更新項Δa(n+1)のステップサイズパラメータは、前回収束した時の前記振幅フィルタ係数a(last)を、前記エンジンの駆動トルク変動量trq(last)で除した値(割った値)の比例値に設定されるようにしてもよい。
【0032】
ここで、エンジンを振動または騒音の発生源とした場合には、エンジンから評価点に伝達される振動または騒音は、エンジンの駆動トルク変動量trqに比例する。つまり、制御が収束している状態において、制御信号を出力してから評価点までの伝達関数Gの振幅は、振幅フィルタ係数a(last)を、駆動トルク変動量trq(last)で除した値に対応する。そして、上記したように、振幅更新項Δa(n+1)のステップサイズパラメータに、前回収束した時の振幅フィルタ係数a(last)を前回収束した時の駆動トルク変動量trq(last)で除した値の比例値を設定することで、当該ステップサイズパラメータが、前回収束した時の伝達関数Gの振幅に対応する。従って、確実に早期に収束させることができる。
【図面の簡単な説明】
【0033】
【図1】第一実施形態:能動型振動騒音抑制装置を示す制御ブロック図である。
【図2】式(48)において、q=p=3、かつ、(3ΦG−ΦhG)=0の場合に、n=0,1のそれぞれにおける位相フィルタ係数φ(t)の範囲を示す。
【図3】式(48)において、q=p=3の場合に、n=−1,0,1のときの安定領域および不安定領域を示す。横軸は、(3ΦG−ΦhG)であり、縦軸は、φである。
【図4】第一伝達関数Gの位相成分ΦGと第一推定伝達関数Ghの位相成分ΦhGの位相差が150°の場合の解析結果を示す。(a)は残留信号を示し、(b)は正弦波制御信号を示し、(c)は振幅フィルタ係数を示し、(d)は位相フィルタ係数を示す。
【図5】第二実施形態:能動型振動騒音抑制装置を示す制御ブロック図である。
【発明を実施するための形態】
【0034】
<第一実施形態>
(1.能動型振動騒音抑制装置の概要)
能動型振動騒音抑制装置100の概要について説明する。能動型振動騒音抑制装置100は、種々の発生源が振動または騒音を発生する場合に、所望の位置(評価点)において抑制対象の振動または騒音を能動的に抑制するために、正弦波制御信号y(n)に応じた制御振動または制御音を発生させる装置である。つまり、抑制対象の振動または騒音に対して制御振動または制御音を合成させることで、所定位置(評価点)において、制御振動または制御音が抑制対象の振動または騒音を打ち消すように作用する。その結果、評価点において、抑制対象の振動または騒音が抑制されることになる。
【0035】
ここで、自動車を例にあげて説明する。自動車において、エンジン(内燃機関)が振動騒音発生源となり、エンジンによって発生した振動や騒音が車室内に伝達されないようにすることが望まれる。そこで、エンジンによって発生した振動または騒音を能動的に抑制するために、発生装置によって制御振動または制御音を発生させる。なお、以下において、能動型振動騒音抑制装置は、自動車に適用し、エンジンによって発生される振動または騒音を抑制する装置を例に挙げて説明するが、これに限られるものではない。抑制すべき振動や騒音を発生するものであれば、全てに適用できる。
【0036】
また、能動型振動騒音抑制装置による適応制御アルゴリズムは、適応最小平均自乗フィルタ(Filtered-X LMS)、特にDXHSアルゴリズムを用いる。つまり、当該装置は、適応フィルタ係数W(n)としての振幅フィルタ係数a(n),位相フィルタ係数φ(n)を算出し、当該フィルタ係数a(n),φ(n)をおよびエンジンの振動または騒音の角周波数ωを用いて正弦波制御信号y(n)を生成し、正弦波制御信号y(n)に応じた制御振動または制御音を出力して、評価点20における振動または騒音を能動的に抑制する装置である。
【0037】
(2.能動型振動騒音抑制装置の詳細構成)
能動型振動騒音抑制装置100の詳細構成について、図1を参照して説明する。能動型振動騒音抑制装置100は、上述したように、DXHSアルゴリズムを用いた適応制御を適用する。そして、図1に示すように、能動型振動騒音抑制装置100は、エンジン制御部30によりエンジン(図1においては、「E/G」と記載)10が駆動されているとき、エンジン10によって発生される抑制対象の振動または騒音が第二伝達関数Hを介して評価点20に伝達する場合に、評価点20における振動または騒音を低減するための装置である。
【0038】
能動型振動騒音抑制装置100は、周波数算出部110と、制御信号生成部120と、発生装置130と、残留信号検出部140と、第一推定伝達関数設定部(以下、「Ghデータ設定部」と称する)150と、適応フィルタ係数更新部160と、パラメータ設定部170とを備えている。なお、数式および図面において、推定値を意味する「^」を用いるが、明細書の本文においては記載の都合上、推定値「ハット(^)」は「h」と記載する。以下に、能動型振動騒音抑制装置100の各構成について説明する。
【0039】
周波数算出部110は、エンジン10の回転数を検出する回転検出器(図示せず)から周期性のパルス信号を入力し、当該パルス信号に基づいて、エンジン10が発生する振動または騒音(抑制対象振動等)の主成分の周波数fを算出する。なお、この周波数fに2πを乗算した値は、角周波数ωとなる。つまり、周波数算出部110は、角周波数ωを算出することもできる。
【0040】
制御信号生成部120は、正弦波制御信号y(n)を生成する。正弦波制御信号y(n)は、式(8)のように表される。ここで、添字の(n)は、サンプリング数(時間ステップ)を表す添字である。つまり、式(8)および式(9)より明らかなように、正弦波制御信号y(n)は、角周波数ωと、適応フィルタ係数W(n)としての振幅フィルタ係数a(n)および位相フィルタ係数φ(n)とを構成成分に含む、時刻t(n)における信号である。
【0041】
【数8】
【0042】
ここで、式(8)における角周波数ωは、周波数算出部110により算出された周波数fに基づいて算出した値、または、周波数算出部110にて算出した値である。従って、正弦波制御信号y(n)は、エンジン10による振動または騒音の主成分の周波数fに応じた値となる。さらに、式(8)に示すように、周期関数(sin関数)の位相として、位相フィルタ係数φ(n)に対して1より大きな位相乗算係数qを乗算した値を、ωt(n)に加算するようにする。また、式(8)における振幅フィルタ係数a(n)および位相フィルタ係数φ(n)は、式(9)に示すように、DXHSアルゴリズムにおける適応フィルタ係数W(n)であり、適応的に更新される。
【0043】
【数9】
【0044】
この適応フィルタ係数W(n)の更新式は、式(10)にて表される。このように、適応フィルタ係数W(n+1)は、前回値W(n)に対して更新項ΔW(n+1)を加減算して更新される。そして、更新項ΔW(n+1)は、後述する適応フィルタ係数更新部160によって適応的に決定される。
【0045】
【数10】
【0046】
この式(10)を、振幅フィルタ係数a(n)と位相フィルタ係数φ(n)のそれぞれで表した場合には、式(11)および式(12)のようになる。つまり、式(11)に示すように、振幅フィルタ係数a(n+1)は、前回更新された振幅フィルタ係数a(n)に対して振幅更新項Δa(n+1)を加減算して更新される。また、式(12)に示すように、位相フィルタ係数φ(n+1)は、前回更新された位相フィルタ係数φ(n)に対して位相更新項Δφ(n+1)を加減算して更新される。
【0047】
【数11】
【0048】
【数12】
【0049】
ここで、振幅フィルタ係数の初期値a(0)および位相フィルタ係数φ(0)は、後述するパラメータ設定部170にて設定される。ここで、サンプリング時刻nは、エンジン10を始動することによりリセットされるようにしてもよい。この場合、サンプリング時刻nがゼロ(0)となる場合とは、エンジン10を始動したときとなる。この他に、演算処理において、nが取り得る最大値n(max)に到達したときにも、n=0となる。
【0050】
発生装置130は、実際に振動や音を発生する装置である。この発生装置130は、制御信号生成部120によって生成された正弦波制御信号y(n)に基づいて駆動する。例えば、制御振動を発生させる発生装置130は、例えば、車両の駆動系に連結されるフレームやサスペンションメンバなどのサブフレームに配置される振動発生装置である。また、制御音を発生させる発生装置130は、例えば、車室内に配置されるスピーカー等である。発生装置130が例えばソレノイドやボイスコイルなどのように磁力を用いて制御振動や制御音を発生させる装置の場合には、コイル(図示せず)に供給する電流、電圧または電力を、各時刻t(n)における正弦波制御信号y(n)に応じるように駆動することで、発生装置130が正弦波制御信号y(n)に応じた制御振動または制御音を発生する。
【0051】
そうすると、評価点20においては、発生装置130によって発生された制御振動または制御音が伝達系G1を介して伝達された制御振動または制御音Z(n)が、エンジン10によって発生された抑制対象の振動または騒音が第二伝達関数Hを介して伝達された振動騒音X(n)に対して干渉する。
【0052】
そこで、残留信号検出部140は、評価点20に配置されており、評価点20において干渉による残留振動または残留騒音(本発明における「残留信号」に相当する)e(n)を検出する。この残留信号e(n)は、式(13)で表される。例えば、残留振動を検出する残留信号検出部140としては、加速度センサなどを適用できる。また、残留音を検出する残留信号検出部140としては、吸音マイクなどを適用できる。残留信号検出部140によって検出される残留信号e(n)がゼロになることが理想状態である。
【0053】
【数13】
【0054】
ここで、第一伝達関数Gは、制御信号生成部120と評価点20との間の伝達系の伝達関数である。つまり、第一伝達関数Gは、発生装置130そのものの伝達関数と、発生装置130と評価点20との間の伝達系G1の伝達関数とを含む。そして、第一伝達関数Gは、周波数fに応じた振幅成分AGと位相成分ΦGとにより表される。また、第二伝達関数Hは、エンジン10と評価点20との間の伝達系の伝達関数である。つまり、第二伝達関数Hは、振幅成分AHと位相成分ΦHとにより表される。そうすると、式(13)は、式(14)のように表される。
【0055】
【数14】
【0056】
Ghデータ設定部150には、公知の伝達関数同定処理により算出された第一推定伝達関数Gh(第一伝達関数Gの推定値)が記憶されている。そして、第一伝達関数Gは、周波数fに応じた振幅成分AGと位相成分ΦGとにより表される。そこで、式(15)に示すように、第一推定伝達関数Ghとしては、周波数fに応じた振幅成分AhGと位相成分ΦhGとにより表される。なお、式(15)においては、第一推定伝達関数Gh、振幅成分AhGおよび位相成分ΦhGは、周波数fに応じたものとなるため、fの関数であることを明記するために、それぞれGh(f)、AhG(f)およびΦhG(f)と記載している。
【0057】
【数15】
【0058】
そして、Ghデータ設定部150は、記憶されている第一推定伝達関数Ghの中から、周波数算出部110にて算出された周波数fに応じた第一推定伝達関数Ghを選択する。つまり、Ghデータ設定部150は、周波数算出部110にて算出された周波数fに応じた振幅成分AhGおよび位相成分ΦhGを決定する。
【0059】
適応フィルタ係数更新部160(本発明の「振幅フィルタ係数更新部」および「位相フィルタ係数更新部」に相当する)は、残留信号e(n)が小さくなるように、制御信号生成部120にて生成される適応フィルタ係数W(n)に対して加減算するための更新項ΔW(n+1)を算出する。適応フィルタ係数W(n)は、上述したように、振幅フィルタ係数a(n)と位相フィルタ係数φ(n)とにより構成される。つまり、適応フィルタ係数更新部160は、振幅フィルタ係数a(n)に対して加減算するための振幅更新項Δa(n+1)、および、位相フィルタ係数φ(n)に対して加減算するための位相更新項Δφ(n+1)を算出する。
【0060】
この適応フィルタ係数更新部160は、残留信号e(n)に基づき設定された評価関数J(n)を最小とするように適応フィルタ係数W(n)の更新項ΔW(n+1)を算出する。また、DXHSアルゴリズムを適用するため、適応フィルタ係数更新部160は、更新項ΔW(n+1)の算出に際して、周波数算出部110により算出された周波数f(または角周波数ω)、並びに、Ghデータ設定部150により決定された第一推定伝達関数Ghの振幅成分AhGおよび位相成分ΦhGを用いる。
【0061】
以下に、適応フィルタ係数更新部160において、適応フィルタ係数W(n)の更新項ΔW(n+1)の導き方について説明する。評価関数J(n)を式(16)のように定義する。つまり、評価関数J(n)は、残留信号検出部140により検出される残留信号e(n)の二乗とする。つまり、評価関数J(n)が最小となるような正弦波制御信号y(n)を求める。
【0062】
【数16】
【0063】
次に、LMSアルゴリズムにおける勾配ベクトル▽(n)を式(17)に従って算出する。勾配ベクトル▽(n)は、評価関数J(n)を適応フィルタ係数W(n)で偏微分して得られる。そうすると、勾配ベクトル▽(n)は、式(17)の右辺のように表される。
【0064】
【数17】
【0065】
そして、式(18)に示すように、算出した勾配ベクトル▽(n)にステップサイズパラメータμを乗じた項を、更新項ΔW(n+1)とする。
【0066】
【数18】
【0067】
式(10)と式(18)より、適応フィルタ係数W(n)の更新式は、式(19)のように表される。
【0068】
【数19】
【0069】
ここで、適応フィルタ係数W(n)は、上述したように、振幅フィルタ係数a(n)と位相フィルタ係数φ(n)とにより構成される。そして、式(14)における第一伝達関数Gの振幅成分AGと位相成分ΦGとのそれぞれを第一推定伝達関数Ghの振幅成分AhGおよび位相成分ΦhGに置き換えて、式(19)を演算する。そうすると、振幅フィルタ係数a(n)に対する振幅更新項Δa(n+1)は、式(20)のように表され、位相フィルタ係数φ(n)に対する位相更新項Δφ(n+1)は、式(21)のように表される。ここで、式(20)の(1/AhG)は、振幅フィルタ係数a(n)の更新に対して正規化処理を加えたものである。
【0070】
【数20】
【0071】
【数21】
【0072】
ここで、式(20)(21)によりの更新項を適用した場合には、第一伝達関数Gの位相成分ΦGと第一推定伝達関数Ghの位相成分ΦhGとのずれが、−90°〜90°の範囲であれば、制御を収束させることができる。しかし、位相のずれが−90°〜90°の範囲を超えると、制御の不安定領域となり、制御が発散するおそれがある。そこで、式(20)および式(21)を、式(22)および式(23)に置き換える。つまり、式(22)(23)は、式(20)(21)の更新項の式において位相乗算係数qを削除したものとする。ただし、式(8)に示す正弦波制御信号y(n)における位相乗算係数qはそのまま残しておく。このようにすることで、制御が発散することなく、収束させることができる。この理論については、後述する。
【0073】
【数22】
【0074】
【数23】
【0075】
さらに、確実に収束させるために、式(22)および式(23)を式(24)および式(25)に置き換える。つまり、それぞれの更新項の式において、前回更新された位相フィルタ係数φ(n)に対して、1より大きな値である安定化係数mにより除算する。ただし、位相乗算係数qは、安定化係数mより大きな値とする。さらに、それぞれの更新項の式において、第一推定伝達関数Ghの位相成分ΦhGに対して任意の係数pにより除算する。この係数pは、1を含み、1以外の数であってもよい。このようにすることで、確実に収束させることができる。
【0076】
【数24】
【0077】
【数25】
【0078】
そうすると、振幅フィルタ係数a(n)の更新式は式(26)のように表され、位相フィルタ係数φ(n)の更新式は式(27)のように表される。
【0079】
【数26】
【0080】
【数27】
【0081】
このようにして、適応フィルタ係数更新部160は、振幅フィルタ係数a(n)に対する振幅更新項Δa(n+1)、および、位相フィルタ係数φ(n)に対する位相更新項Δφ(n+1)を算出する。つまり、制御信号生成部120において、当該更新項Δa(n+1)、Δφ(n+1)を用いて正弦波制御信号y(n)を適応的に更新することができる。
【0082】
パラメータ設定部170は、制御信号生成部120において、正弦波制御信号y(0)の適応フィルタ係数W(n)としての初期値W(0)を設定する。具体的には、パラメータ設定部170は、振幅フィルタ係数の初期値a(0)および位相フィルタ係数の初期値φ(0)を設定する。ここで、初期値a(0),φ(0)におけるサンプリング時刻n=0のときとは、上述したように、例えば、エンジン10を始動したときなどとする。この場合、サンプリング時刻nは、エンジン10が始動してからエンジン10が停止するまでの間増加していく。この他に、演算処理において、nが取り得る最大値n(max)に到達したときにも、n=0となる。
【0083】
まず、振幅フィルタ係数の初期値a(0)は、式(28)に示すように、0とする。位相フィルタ係数の初期値φ(0)は、式(29)に示すように、前回収束した時の位相フィルタ係数φ(last)としている。なお、式(29)では、初期値φ(0)を前回収束した時の位相フィルタ係数φ(last)としているが、当該位相フィルタ係数φ(last)の比例値などとしてもよい。
【0084】
【数28】
【0085】
【数29】
【0086】
ここで、パラメータ設定部170は、初期値φ(0)として用いる位相フィルタ係数φ(last)を以下のようにして取得して記憶している。残留信号検出部140により検出された残留信号e(n)を常に取得しており、残留信号e(n)の絶対値がゼロに近い設定値以下となるか否かを判定し、制御が収束したか否かを判定する。制御が収束したか否かの判定は、残留信号e(n)の他に、振幅フィルタ係数a(n)の振幅更新項Δa(n+1)または位相フィルタ係数φ(n)の位相更新項Δφ(n+1)の絶対値がゼロに近い設定値以下となるか否かにより判定することもできる。そして、パラメータ設定部170は、制御が収束したと判定されたときの位相フィルタ係数φ(last)を制御信号生成部120から取得する。パラメータ設定部170は、このようにして取得した前回収束した時の位相フィルタ係数φ(last)を記憶している。
【0087】
ここで、上記式(28)においては、振幅フィルタ係数の初期値a(0)を常に0とした。この他に、振幅フィルタ係数の初期値a(0)を周波数fに応じた値に設定することもできる。この場合、例えば、パラメータ設定部170が、周波数fに応じた振幅フィルタ係数の初期値a(0)に関するマップを記憶しておき、現在の周波数fと当該マップに記憶されている情報とに基づいて振幅フィルタ係数の初期値a(0)を設定する。このように現在の周波数fに応じた振幅フィルタ係数の初期値a(0)を設定することで、早期の収束を実現できる。
【0088】
また、上記式(29)においては、位相フィルタ係数の初期値φ(0)は、前回収束した時の位相フィルタ係数φ(last)とした。この他に、位相フィルタ係数の初期値φ(0)は、周波数fに応じた値に設定することもできる。この場合、位相フィルタ係数の初期値φ(0)は、前回収束した時の位相フィルタ係数φ(last)と前回収束した時の周波数fを記憶しておき、前回収束した時の周波数fを現在の周波数fに変換するための係数を前回収束した時の位相フィルタ係数φ(last)に乗算した値としてもよい。例えば、パラメータ設定部170が、周波数fに応じた位相フィルタ係数の変換係数(比例係数)に関するマップを記憶しておき、前回収束した時の位相フィルタ係数φ(last)に当該変換係数を乗算した値を位相フィルタ係数の初期値φ(0)とする。このように現在の周波数fに応じた位相フィルタ係数の初期値φ(0)を設定することで、早期の収束を実現できる。
【0089】
このように、パラメータ設定部170が周波数fに基づきそれぞれの初期値を設定する場合には、図1において、周波数算出部110からパラメータ設定部170への情報の伝達が行われる。すなわち、図1において、周波数算出部110からパラメータ設定部170への破線の矢印により表される。なお、上記したように周波数fに応じない初期値を設定する実施形態においては、周波数算出部110からパラメータ設定部170への情報の伝達は行われないため、図1において破線の矢印にて図示した。
【0090】
(2.理論説明)
次に、上述したように振幅フィルタ係数a(n)に対する振幅更新項Δa(n+1)、および、位相フィルタ係数φ(n)に対する位相更新項Δφ(n+1)を更新する場合の理論説明を行う。上述したDXHSアルゴリズムの基本式は、式(14)、式(22)および式(23)を連続時間で表記すると、式(30)のように表される。ただし、実際には、式(22)(23)ではなく、式(24)(25)を適用していることは、上述したとおりである。なお、以下において、(t)は、時刻tの関数を表す。また、φimag(t)=q×φ(t)と定義し、μφ11=q×μφ1と定義している。
【0091】
【数30】
【0092】
ここで、式(30)において、より簡易的にするために、振幅成分AGおよびAhGを省略して、更新項da/dtを正規化前に戻す。そうすると、式(30)は式(31)のように表される。
【0093】
【数31】
【0094】
制御が安定している場合を考えると、t→∞のときにe2→0となればよい。つまり、tが十分に大きい場合に、式(32)を満たしていれば、制御が安定保証される。
【0095】
【数32】
【0096】
そこで、式(31)の第一式より、式(33)のように表される。
【0097】
【数33】
【0098】
式(33)に式(31)の第二式および第三式を代入して展開すると、式(34)のようになる。
【0099】
【数34】
【0100】
ここで、式(34)の右辺の第一項に式(31)の第一式を代入して計算すると、式(35)のようになる。また、式(34)の右辺の第三項に式(31)の第一式を代入して計算すると、式(36)のようになる。
【0101】
【数35】
【0102】
【数36】
【0103】
そして、式(35)と式(36)を加算すると、式(37)となる。
【0104】
【数37】
【0105】
ここで、式(34)の右辺の第二項を計算すると、式(38)のようになる。また、式(34)の右辺の第四項を計算すると、式(39)のようになる。
【0106】
【数38】
【0107】
【数39】
【0108】
そして、式(38)と式(39)を加算すると、式(40)となる。
【0109】
【数40】
【0110】
式(37)および式(40)より、式(34)は、式(41)のように表される。
【0111】
【数41】
【0112】
ここで、式(41)において、第五項目以外は全て2ωの周期関数となっている。そして、t→∞のときに制御が収束している状態を考えるため、t→∞のときにe(t)、a(t)、φ(t)が一定値に収束することになる。そうすると、t→∞のときに、式(41)の第一項から第四項までの周期関数の和が一定値にならなければならない。ただし、一定値は、ゼロとは限らず、ゼロ以外の値であってもよい。
【0113】
そして、上記の一定値を導き出すために、それぞれの周期関数の平均値を算出する。式(41)の第一項から第四項までの周期関数は、全て2ωの関数であり、時間が十分に経過していると仮定すると、それぞれの周期関数の平均値はゼロとなる。このことは、式(42)より導き出すことができる。ここで、Tは周期を表す。
【0114】
【数42】
【0115】
従って、式(41)の第一項から第四項までの周期関数の和の収束値は、ゼロと推定できる。そうすると、式(41)において、第五項のみを検討すれば足りる。そこで、式(32)および式(41)の第五項より、制御が安定保証されるためには、少なくとも式(43)の条件を満たしている必要がある。
【0116】
【数43】
【0117】
ここで、式(44)より、式(45)の条件が必要となる。
【0118】
【数44】
【0119】
【数45】
【0120】
式(45)より、式(46)の条件が必要となる。ただし、nは整数である。
【0121】
【数46】
【0122】
そして、現在、q>1であり、pは任意係数であるため、式(46)は式(47)のように展開することができる。つまり、t→∞の時に、式(47)を満たすような位相フィルタ係数φ(t)を設定することで、制御が発散しない。
【0123】
【数47】
【0124】
ここで、本実施形態とは異なる一般的なDXHSアルゴリズムの場合には、式(45)においてq=1の場合となる。このとき、実際の第一伝達関数Gの位相成分ΦGと第一推定伝達関数Ghの位相成分ΦhGとの位相ずれが−90°〜90°の範囲であれば、q=1とした式(45)の条件を満たす。つまり、位相ずれが−90°〜90°の範囲のときに安定性が保証される。しかしながら、q=1の場合には、−90°〜90°の範囲外になると、制御が発散する。これに対して、本実施形態においては、q>1であるため、上述したように、式(47)を満たせば、制御が収束する。例えば、q=3とし、p=3とした場合には、式(47)は式(48)となる。
【0125】
【数48】
【0126】
式(48)において、伝達関数位相差(3ΦG−ΦhG)=0の場合、位相フィルタ係数φ(t)の範囲は、n=0のときに−135°〜+135°となり、n=1のときに+405°〜+675°、すなわち+45°〜−45°となる。この範囲を−180°〜+180°の範囲で示すと図2に示すようになる。つまり、n=0,1とした場合には、n=0とn=1の2つの場合におけるトータルの位相フィルタ係数φ(t)は360°全範囲を選択することができる。また、n=−1のときには−675°〜−405°、すなわち+45°〜−45°となる。つまり、n=0,−1とした場合にも、上記同様となる。
【0127】
次に、伝達関数位相差(3ΦG−ΦhG)が0以外の場合についても考える。この場合、式(48)において、n=−1,0,1とした場合に、それぞれの安定領域と不安定領域は図3に示すようになる。この関係から、位相フィルタ係数φ(t)の範囲をどの範囲で設定可能とすればよいかを検討する。
【0128】
q=p=3の場合には、n=0,1の位相フィルタ係数φ(t)は360°のどこでも選択でき、かつ、伝達関数位相差−720°<(3ΦG−ΦhG)<+720°である。つまり、n=0、かつ、(3ΦG−ΦhG)=−720°のときに、+225°<φ(t)<+495°となる。n=1、かつ、(3ΦG−ΦhG)=−720°のときに、+765°<φ(t)<+1035°となる。n=0、かつ、(3ΦG−ΦhG)=+720°のときに、−495°<φ(t)<−225°となる。n=1、かつ、(3ΦG−ΦhG)=+720°のときに、45°<φ(t)<315°となる。これらの範囲から、−495°<φ(t)<+1035°としておけば、制御が発散しない、すなわち制御が収束するようにできる。また、q=p=3で、n=0,−1とした場合には、上記と同様な考え方により、−1035°<φ(t)<+495°としておけば、制御が発散しない。
【0129】
(解析)
次に、上記実施形態について、第一伝達関数Gの位相成分ΦGと第一推定伝達関数Ghの位相成分ΦhGとの位相差が180°の場合であり、位相乗算係数q=3,m=2とした場合について解析を行った。この解析結果を図4に示す。図4(a)に示すように、残留信号eが収束していることが分かる。このときの正弦波制御信号yは図4(b)に示すとおりである。そして、図4(c)(d)に示すように、振幅フィルタ係数aおよび位相フィルタ係数φがそれぞれ収束していることが分かる。特に、図4(d)に示すように、位相フィルタ係数φが振幅フィルタ係数aに比べて早期に収束していることが分かる。
【0130】
このように、位相差が180°であったとしても、最終的に制御を発散させることなく、かつ、早期に収束させることができる。従って、第一伝達関数Gが温度や経年によって変化することによって第一伝達関数Gの位相成分と第一推定伝達関数Ghの位相成分とがずれたとしても、制御を早期に収束させることができる。さらに、第一推定伝達関数Ghを用いることで、第一推定伝達関数Ghの精度が高い場合には、早く収束させることができる。さらに、振幅フィルタ係数aは、収束値よりも大きな値となることなく、収束している。つまり、振幅フィルタ係数aがオーバーシュートしていない。従って、収束するまでの間、振動が大きくなることを抑制できる。
【0131】
また、上述したように、位相フィルタ係数の初期値φ(0)を、単にゼロに設定するのではなく、前回収束した時の位相フィルタ係数φ(last)に基づき設定している。このとき、前回収束した時の位相フィルタ係数φ(last)は、前回収束した時点における伝達関数Gの位相を考慮した値となっていると考えられる。つまり、位相フィルタ係数の初期値φ(0)は、現在の伝達関数Gの経年変化に追従していると言える。従って、制御が発散することを抑制でき、最終的に制御を収束させることができる。
【0132】
ここで、上記実施形態において、位相フィルタ係数の初期値φ(0)を、単にゼロに設定することもできる。このようにしたとしても、制御が発散せずに収束させることができるという効果を奏することはできる。しかし、この場合には、位相フィルタ係数の初期値φ(0)を前回収束した時の位相フィルタ係数φ(last)に基づき設定する場合に比べて、早期収束の効果は劣る。
【0133】
<第二実施形態>
本実施形態の能動型振動騒音抑制装置200について、図5を参照して説明する。第一実施形態においては、適応フィルタ係数Wの更新式において、第一伝達関数Gの推定値Ghを用いた。これに対して、本実施形態の能動型振動騒音抑制装置200は、適応フィルタ係数Wの更新式において、第一伝達関数Gの推定値Ghを用いない。
【0134】
能動型振動騒音抑制装置200は、周波数算出部110と、制御信号生成部120と、発生装置130と、残留信号検出部140と、適応フィルタ係数更新部260と、トルク変動量算出部280と、パラメータ設定部270を備えている。ここで、第一実施形態と同一構成については、同一符号を付して説明を省略する。つまり、本実施形態の能動型振動騒音抑制装置200は、第一実施形態に対して、適応フィルタ係数更新部260、トルク変動量算出部280、パラメータ設定部270が相違する。
【0135】
適応フィルタ係数更新部260(本発明の「振幅フィルタ係数更新部」および「位相フィルタ係数更新部」に相当する)は、第一実施形態と同様に、残留信号e(n)が小さくなるように、制御信号生成部120にて生成される適応フィルタ係数W(n)に対して加減算するための更新項ΔW(n+1)を算出する。この適応フィルタ係数更新部260は、振幅フィルタ係数a(n)に対して加減算するための振幅更新項Δa(n+1)、および、位相フィルタ係数φ(n)に対して加減算するための位相更新項Δφ(n+1)を算出する。
【0136】
ここで、第一実施形態における振幅更新項Δa(n+1)は式(24)に示すとおりである。式(24)において、(μa1/AhG)を第一推定伝達関数Ghの振幅成分AhGに依存しない一定の振幅用ステップサイズパラメータμa2とし、かつ、(ΦhG/p)をゼロとする。そうすると、振幅更新項Δa(n+1)は式(49)のように表される。つまり、式(49)で表される振幅更新項Δa(n+1)は、第一推定伝達関数Ghに依存しない更新項となる。ここで、振幅用ステップサイズパラメータμa2は、後述するが、パラメータ設定部270により、前回収束した時の振幅フィルタ係数a(last)を用いて変更される。
【0137】
【数49】
【0138】
また、第一実施形態における位相更新項Δφ (n+1)は式(25)に示すとおりである。式(25)において、(ΦhG/p)をゼロとする。そうすると、位相更新項Δφ(n+1)は式(50)のように表される。つまり、式(50)で表される位相更新項Δφ(n+1)は、第一推定伝達関数Ghに依存しない更新項となる。
【0139】
【数50】
【0140】
トルク変動量算出部280は、エンジン制御部30からエンジン10の駆動トルク変動量trq(n)に関する情報を受け取り、エンジン10の駆動トルク変動量trq(n)を算出する。例えば、駆動トルク変動量trq(n)に関する情報とは、駆動トルク変動量trq(n)そのもの、アクセル開度の変化量などである。
【0141】
パラメータ設定部270は、第一実施形態と同様に、振幅フィルタ係数の初期値a(0)および位相フィルタ係数の初期値φ(0)を、式(28)(29)に示すように設定する。さらに、パラメータ設定部270は、前回収束した時の振幅フィルタ係数a(last)と、前回収束した時の駆動トルク変動量trq(last)とを用いて、式(51)に従って、振幅用ステップサイズパラメータμa2を設定する。式(51)に示すように、振幅用ステップサイズパラメータμa2は、前回収束した時の振幅フィルタ係数a(last)を、駆動トルク変動量trq(last)で除した値(割った値)に、一定のステップサイズパラメータμa3を乗じた値とする。
【0142】
【数51】
【0143】
ここで、第一実施形態にて説明したように、位相フィルタ係数φ(n)は、360°全範囲を選択したとしても、制御を収束させることができる。そのため、式(24)(25)において、周期関数(sin関数またはcos関数)の位相成分において、第一推定伝達関数Ghの位相成分ΦhGを用いないとしても、位相フィルタ係数φ(n)の値によって制御が発散するということがない。そこで、式(49)(50)のように当該位相成分ΦhGを用いない更新式としたとしても、制御を収束させることができる。
【0144】
また、式(49)において、第一推定伝達関数Ghの振幅成分AhGを用いないが、振幅更新項Δa(n+1)の振幅用ステップサイズパラメータμa2が、前回収束した時の振幅フィルタ係数a(last)に基づいている。ここで、前回収束した時の振幅フィルタ係数a(last)は、前回収束した時点における伝達関数Gの振幅を考慮した値となっていると考えられる。つまり、振幅更新項Δa(n+1)の振幅用ステップサイズパラメータμa2は、現在の伝達関数Gの経年変化に追従していると言える。
【0145】
特に、式(51)に示すように、振幅用ステップサイズパラメータμa2は、前回収束した時の振幅フィルタ係数a(last)を、駆動トルク変動量trq(last)で除した値の比例値に設定するようにしている。ここで、エンジン10を振動または騒音の発生源とした場合には、エンジン10から評価点20に伝達される振動または騒音は、エンジン10の駆動トルク変動量trqに比例する。つまり、制御が収束している状態において、第一伝達関数Gの振幅は、振幅フィルタ係数a(last)を駆動トルク変動量trq(last)で除した値に対応する。
【0146】
そして、上記したように、振幅更新項Δa(n+1)の振幅用ステップサイズパラメータμa2に、前回収束した時の振幅フィルタ係数a(last)を前回収束した時の駆動トルク変動量trq(last)で除した値の比例値を設定することで、当該振幅用ステップサイズパラメータμa2が、前回収束した時の第一伝達関数Gの振幅に対応する。従って、式(49)を適用したとしても、振幅の追従性能は劣ることなく、確実に早期に収束させることができる。
【0147】
このように、第二実施形態のように、第一推定伝達関数Ghを用いずに適応フィルタ係数Wを更新したとしても、第一実施形態と同様に確実にかつ早期に制御を収束させることができる。さらに、第一推定伝達関数Ghを用いないため、第一伝達関数Gの同定処理を行う必要がなく、かつ、同定精度を追求する必要もない。そのため、演算処理を簡易的にすることができ、かつ、演算処理負荷を低減することができる。
【0148】
ここで、上記実施形態において、振幅用ステップサイズパラメータμa2は、前回収束した時の振幅フィルタ係数a(last)に基づいて設定したが、単に一定値に設定することもできる。このようにしたとしても、制御が発散せずに収束させることができるという効果を奏することはできる。しかし、この場合には、振幅用ステップサイズパラメータμa2を前回収束した時の振幅フィルタ係数a(last)に基づいて設定する場合に比べて、振幅の追従性能が劣り、早期収束の効果は劣る。
【0149】
<第三実施形態>
上記第一実施形態において、式(22)および式(23)を式(24)および式(25)に置き換えて処理を行った。この他に、振幅フィルタ係数a(n+1)の更新項Δa(n+1)および位相フィルタ係数φ(n)の更新項Δφ(n+1)を式(22)および式(23)そのものを用いてもよい。すなわち、式(24)(25)においてm=1とした場合に相当する。この場合にも、制御を収束させることができる。
【0150】
<その他>
上記実施形態において、振幅更新項Δa(n+1)および位相更新項Δφ(n+1)は、式(24)(25)および式(49)(50)に示す更新式とした。この他に、振幅更新項Δa(n+1)および位相更新項Δφ(n+1)は、式(24)(25)または式(49)(50)に示す項に、収束安定性を高めるためなどに別の項を加減算する式としてもよい。すなわち、少なくとも、振幅更新項Δa(n+1)および位相更新項Δφ(n+1)は、式(24)(25)または式(49)(50)に示す項を含む更新式とすれば、上記効果を発揮することができる。
【符号の説明】
【0151】
10:振動騒音発生源(エンジン)、 20:評価点
100,200:能動型振動騒音抑制装置
110:周波数算出部、 120:制御信号生成部、 130:発生装置
140:残留信号検出部、 150:第一推定伝達関数設定部
160,260:適応フィルタ係数更新部、 170,270:パラメータ設定部
180:トルク変動量算出部
【特許請求の範囲】
【請求項1】
制御振動または制御音を出力して、評価点における振動または騒音を能動的に抑制する能動型振動騒音抑制装置であって、
振動または騒音の発生源の周波数、適応フィルタ係数としての振幅フィルタ係数および位相フィルタ係数により構成される正弦波制御信号y(n)を生成する制御信号生成部と、
前記正弦波制御信号y(n)に応じた前記制御振動または制御音を出力する制御振動制御音発生装置と、
前記評価点において前記発生源による振動または騒音と前記制御振動または制御音との干渉による残留信号e(n)を検出する残留信号検出部と、
前回更新された前記振幅フィルタ係数a(n)に対して加減算して更新するための振幅更新項Δa(n+1)を、前記残留信号e(n)が小さくなるように算出する振幅フィルタ係数更新部と、
前回更新された前記位相フィルタ係数φ(n)に対して加減算して更新するための位相更新項Δφ(n+1)を、前記残留信号e(n)が小さくなるように算出する位相フィルタ係数更新部と、
を備え、
前記正弦波制御信号y(n)は、位相成分として前記位相フィルタ係数φ(n)に対して1より大きな値を乗算した値を含む能動型振動騒音抑制装置。
【請求項2】
請求項1において、
前記正弦波制御信号y(n)は、式(1)にて表される能動型振動騒音抑制装置。
【数1】
【請求項3】
請求項1または2において、
前記振幅更新項Δa(n+1)は、式(2)の項を含み、
前記位相更新項Δφ(n+1)は、式(3)の項を含む能動型振動騒音抑制装置。
【数2】
【数3】
【請求項4】
請求項3において、
式(2)における振幅係数a1、位相係数φ1および式(3)における振幅係数a2、位相係数φ2は、前記制御信号生成部と前記評価点との間の伝達関数に依存しない係数である能動型振動騒音抑制装置。
【請求項5】
請求項4において、
式(2)は、式(4)であり、
式(3)は、式(5)である能動型振動騒音抑制装置。
【数4】
【数5】
【請求項6】
請求項3において、
前記能動型振動騒音抑制装置は、前記制御信号生成部と前記評価点との間の伝達関数の推定値を予め記憶する推定伝達関数記憶部をさらに備え、
式(2)における振幅係数a1と位相係数φ1の少なくとも一方、および、式(3)における振幅係数a2と位相係数φ2の少なくとも一方は、前記伝達関数の推定値に基づいて得られる係数である能動型振動騒音抑制装置。
【請求項7】
請求項6において、
式(2)は、式(6)であり、
式(3)は、式(7)である能動型振動騒音抑制装置。
【数6】
【数7】
【請求項8】
請求項3〜7の何れか一項において、
前記安定化係数mは1より大きな値に設定され、
前記位相乗算係数qは前記安定化係数mより大きな値に設定される能動型振動騒音抑制装置。
【請求項9】
請求項1〜8の何れか一項において、
前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)に基づき設定される能動型振動騒音抑制装置。
【請求項10】
請求項9において、
前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)とする能動型振動騒音抑制装置。
【請求項11】
請求項9において、
前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)、前回収束した時の周波数f、および、現在の周波数fに基づき設定される能動型振動騒音抑制装置。
【請求項12】
請求項9〜11の何れか一項において、
前記振幅フィルタ係数の初期値a(0)は、現在の周波数fに基づき設定される能動型振動騒音抑制装置。
【請求項13】
請求項9〜12の何れか一項において、
前記振幅更新項Δa(n+1)のステップサイズパラメータは、前回収束した時の前記振幅フィルタ係数a(last)に基づき設定される能動型振動騒音抑制装置。
【請求項14】
請求項13において、
前記能動型振動騒音抑制装置は、エンジンを有する車両に適用され、
前記振幅更新項Δa(n+1)のステップサイズパラメータは、前回収束した時の前記振幅フィルタ係数a(last)を、前記エンジンの駆動トルク変動量trq(last)で除した値の比例値に設定される能動型振動騒音抑制装置。
【請求項1】
制御振動または制御音を出力して、評価点における振動または騒音を能動的に抑制する能動型振動騒音抑制装置であって、
振動または騒音の発生源の周波数、適応フィルタ係数としての振幅フィルタ係数および位相フィルタ係数により構成される正弦波制御信号y(n)を生成する制御信号生成部と、
前記正弦波制御信号y(n)に応じた前記制御振動または制御音を出力する制御振動制御音発生装置と、
前記評価点において前記発生源による振動または騒音と前記制御振動または制御音との干渉による残留信号e(n)を検出する残留信号検出部と、
前回更新された前記振幅フィルタ係数a(n)に対して加減算して更新するための振幅更新項Δa(n+1)を、前記残留信号e(n)が小さくなるように算出する振幅フィルタ係数更新部と、
前回更新された前記位相フィルタ係数φ(n)に対して加減算して更新するための位相更新項Δφ(n+1)を、前記残留信号e(n)が小さくなるように算出する位相フィルタ係数更新部と、
を備え、
前記正弦波制御信号y(n)は、位相成分として前記位相フィルタ係数φ(n)に対して1より大きな値を乗算した値を含む能動型振動騒音抑制装置。
【請求項2】
請求項1において、
前記正弦波制御信号y(n)は、式(1)にて表される能動型振動騒音抑制装置。
【数1】
【請求項3】
請求項1または2において、
前記振幅更新項Δa(n+1)は、式(2)の項を含み、
前記位相更新項Δφ(n+1)は、式(3)の項を含む能動型振動騒音抑制装置。
【数2】
【数3】
【請求項4】
請求項3において、
式(2)における振幅係数a1、位相係数φ1および式(3)における振幅係数a2、位相係数φ2は、前記制御信号生成部と前記評価点との間の伝達関数に依存しない係数である能動型振動騒音抑制装置。
【請求項5】
請求項4において、
式(2)は、式(4)であり、
式(3)は、式(5)である能動型振動騒音抑制装置。
【数4】
【数5】
【請求項6】
請求項3において、
前記能動型振動騒音抑制装置は、前記制御信号生成部と前記評価点との間の伝達関数の推定値を予め記憶する推定伝達関数記憶部をさらに備え、
式(2)における振幅係数a1と位相係数φ1の少なくとも一方、および、式(3)における振幅係数a2と位相係数φ2の少なくとも一方は、前記伝達関数の推定値に基づいて得られる係数である能動型振動騒音抑制装置。
【請求項7】
請求項6において、
式(2)は、式(6)であり、
式(3)は、式(7)である能動型振動騒音抑制装置。
【数6】
【数7】
【請求項8】
請求項3〜7の何れか一項において、
前記安定化係数mは1より大きな値に設定され、
前記位相乗算係数qは前記安定化係数mより大きな値に設定される能動型振動騒音抑制装置。
【請求項9】
請求項1〜8の何れか一項において、
前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)に基づき設定される能動型振動騒音抑制装置。
【請求項10】
請求項9において、
前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)とする能動型振動騒音抑制装置。
【請求項11】
請求項9において、
前記位相フィルタ係数の初期値φ(0)は、前回収束した時の前記位相フィルタ係数φ(last)、前回収束した時の周波数f、および、現在の周波数fに基づき設定される能動型振動騒音抑制装置。
【請求項12】
請求項9〜11の何れか一項において、
前記振幅フィルタ係数の初期値a(0)は、現在の周波数fに基づき設定される能動型振動騒音抑制装置。
【請求項13】
請求項9〜12の何れか一項において、
前記振幅更新項Δa(n+1)のステップサイズパラメータは、前回収束した時の前記振幅フィルタ係数a(last)に基づき設定される能動型振動騒音抑制装置。
【請求項14】
請求項13において、
前記能動型振動騒音抑制装置は、エンジンを有する車両に適用され、
前記振幅更新項Δa(n+1)のステップサイズパラメータは、前回収束した時の前記振幅フィルタ係数a(last)を、前記エンジンの駆動トルク変動量trq(last)で除した値の比例値に設定される能動型振動騒音抑制装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−11697(P2013−11697A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−143442(P2011−143442)
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000219602)東海ゴム工業株式会社 (1,983)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000219602)東海ゴム工業株式会社 (1,983)
【Fターム(参考)】
[ Back to top ]