
能動型消音装置
【課題】耳元に誤差マイクを設置することなく、耳元における騒音を高精度に低減することができる能動型消音装置を提供する。
【解決手段】伝達関数を予め同定する必要のない直接法の適応アルゴリズムを適用すると共に、誤差マイク40を設置する誤差検出位置とは異なる消音評価位置10における仮想誤差をゼロとするように制御信号用適応フィルタCを直接法の適応アルゴリズムにより更新する。
【解決手段】伝達関数を予め同定する必要のない直接法の適応アルゴリズムを適用すると共に、誤差マイク40を設置する誤差検出位置とは異なる消音評価位置10における仮想誤差をゼロとするように制御信号用適応フィルタCを直接法の適応アルゴリズムにより更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、誤差マイクおよび制御音発生装置(スピーカ)を用いて、評価位置における騒音源からの音を能動的に低減する能動型消音装置に関するものである。
【背景技術】
【0002】
この種の装置として、例えば、特許文献1〜5には、耳元に誤差マイクを設置して、耳元近傍の騒音を低減する能動型消音装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−266374号公報
【特許文献2】特開2006−181257号公報
【特許文献3】特開2007−93962号公報
【特許文献4】特開2008−216375号公報
【特許文献5】特開2009−269530号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、人間の耳元に誤差マイクを設置するのは煩わしさがあるため、耳元に設置することなく、耳元の騒音を低減することが望まれる。一方、誤差マイクを耳元から離した場所に設置すると、耳元における騒音を低減する効果が低い。
【0005】
本発明は、このような事情に鑑みてなされたものであり、耳元に誤差マイクを設置することなく、耳元における騒音を高精度に低減することができる能動型消音装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、伝達関数を予め同定する必要のない直接法の適応アルゴリズムを適用すると共に、誤差検出位置とは異なる消音評価位置における仮想誤差をゼロとするように制御信号用適応フィルタを直接法の適応アルゴリズムにより更新する。
【0007】
具体的には、本発明の能動型消音装置は、誤差検出位置とは異なる消音評価位置において、音源から発生された低減対象音を能動的に低減する能動型消音装置であって、前記低減対象音を検出して参照信号を生成する参照信号生成部と、前記参照信号を制御信号用適応フィルタによって信号処理することにより制御信号を生成する制御信号生成部と、前記制御信号生成部により生成された前記制御信号に応じた制御音を発生する制御音発生装置と、前記誤差検出位置に配置され、前記誤差検出位置において前記制御音発生装置により発生された前記制御音と前記音源により発生された前記低減対象音との干渉による実誤差を検出する誤差マイクと、前記参照信号、前記実誤差および仮想適応フィルタに基づいて第一仮想誤差を算出する第一仮想誤差算出部と、前記第一仮想誤差をゼロにするように、前記仮想適応フィルタを更新する仮想適応フィルタ更新部と、前記参照信号、前記仮想適応フィルタおよび前記制御信号用適応フィルタに基づいて前記消音評価位置における誤差としての第二仮想誤差を算出する第二仮想誤差算出部と、前記第二仮想誤差をゼロにするように、前記制御信号用適応フィルタを更新する制御信号用適応フィルタ更新部とを備える。
【0008】
本発明によれば、制御信号用適応フィルタは、誤差検出位置における騒音をゼロにするように更新するのではなく、誤差検出位置とは異なる消音評価位置における騒音をゼロにするように更新している。従って、消音評価位置に誤差マイクを設置しなくても、消音評価位置における騒音をゼロにすることができる。そして、消音評価位置は人間の耳元であるため、人間の耳元に何ら装着することなく、人間の耳元に発生する騒音を低減することができる。
【0009】
さらに、本発明によれば、制御信号用適応フィルタの更新に、直接法の適応アルゴリズムを適用している。ここで、直接法の適応アルゴリズム(Direct Adaptive Algorithm,DAA)は、直接法LMSアルゴリズム、直接法RLSアルゴリズム、直接法FDAアルゴリズムなどである。また、直接法ではない適応アルゴリズムとしては、単純LMSアルゴリズム(Filtered-x LMSアルゴリズムを含む意味である)、単純RLSアルゴリズム、単純FDAアルゴリズムなどである。直接法ではない単純適応アルゴリズムによれば、制御信号生成部と評価点との間の伝達関数Gを予め同定しておき、当該伝達関数Gの推定値を用いて適応フィルタを更新する。このように、直接法の適応アルゴリズムでなければ、伝達関数Gを予め同定しておく必要があり、伝達関数Gの推定値の精度によって、制御性能が変化する。
【0010】
これに対して、本発明は、直接法の適応アルゴリズムを用いて、具体的には第一仮想誤差および第二仮想誤差を用いて、制御信号用適応フィルタを更新している。つまり、制御信号用適応フィルタを更新するために、制御信号生成部と消音評価位置との間の伝達関数Gvを予め同定する必要がない。さらに、当該伝達関数Gvが変化したとしても、本発明による直接法の適応アルゴリズムを用いることにより、制御信号用適応フィルタが現在の伝達関数Gvに応じた値に追従できる。
【0011】
例えば、制御音発生装置を固定した場所に設置したときに、消音評価位置である人間の耳元が移動した場合には、制御信号生成部と人間の耳元との間の伝達関数Gv(制御音発生装置と人間の耳元との間の伝達関数を一部に含む伝達関数である)が変化する。制御音発生装置を固定した場所に設置し、消音対象の人間が移動したとしても、本発明によれば、制御信号用適応フィルタが当該伝達関数Gvに応じた値に追従するため、確実に人間の耳元における騒音を低減することができる。従って、本発明によれば、伝達関数の同定をすることなく、誤差マイクを設置している位置とは異なる消音評価位置における騒音を低減することができる。つまり、誤差マイクを耳元から離れた位置に設置したとしても、確実に耳元の騒音を低減できる。
【0012】
また、本発明において、以下のようにしても良い。前記能動型消音装置は、前記制御信号を第一経路用適応フィルタによって信号処理することにより第一仮想信号を生成する第一仮想信号生成部と、前記参照信号を第二経路用適応フィルタによって信号処理することにより第二仮想信号を生成する第二仮想信号生成部と、前記参照信号を前記第一経路用適応フィルタによって信号処理することにより第三仮想信号を生成する第三仮想信号生成部と、前記第三仮想信号を前記制御信号用適応フィルタによって信号処理することにより第四仮想信号を生成する第四仮想信号生成部とを備える。前記第一仮想誤差算出部は、前記誤差マイクにより検出される実誤差、前記第一仮想信号および前記第二仮想信号に基づいて、前記第一仮想誤差を算出し、前記第二仮想誤差算出部は、前記第二仮想信号および前記第四仮想信号に基づいて、前記第二仮想誤差を算出する。前記仮想適応フィルタ更新部は、前記制御信号および前記第一仮想誤差に基づいて、前記第一仮想誤差をゼロにするように前記第一経路用適応フィルタを更新する第一フィルタ更新部と、前記参照信号および前記第一仮想誤差に基づいて、前記第一仮想誤差をゼロにするように前記第二経路用適応フィルタを更新する第二フィルタ更新部とを備える。そして、前記制御信号用フィルタ更新部は、前記第三仮想信号および前記第二仮想誤差に基づいて、前記第二仮想誤差をゼロにするように前記制御信号用フィルタを更新する。
【0013】
このような構成とすることにより、伝達関数を同定することなく、消音評価位置における仮想誤差をゼロにするように、制御信号用適応フィルタを直接法の適応アルゴリズムにより更新することが確実にできる。
【0014】
また、前記能動型消音装置は、前記実誤差を予め設定された変換フィルタによって信号処理することにより変換仮想誤差を算出する変換仮想誤差算出部をさらに備え、前記第一仮想誤差算出部は、前記変換仮想誤差、前記第一仮想信号および前記第二仮想信号に基づいて前記第一仮想誤差を算出するようにしても良い。
【0015】
当該変換フィルタは、低減対象音における誤差検出位置から消音評価位置までの伝達関数と制御音における誤差検出位置から消音評価位置までの伝達関数とが一致するときに、当該伝達関数に相当するものとなる。つまり、両者の伝達関数がほぼ一致することを前提として、第一仮想誤差を算出している。従って、両者の伝達関数がほぼ一致する場合には、確実に消音評価位置における騒音を低減できる。特に、誤差検出位置と消音評価位置とが相対的に固定されている場合には、上述した両者の伝達関数がほぼ一致することが多い。従って、当該状態であれば、確実に消音評価位置における騒音を低減できる。
【0016】
また、前記第三仮想信号生成部は、前記参照信号を前記第一経路用適応フィルタおよび予め設定された第一変換フィルタによって信号処理することにより前記第三仮想信号を生成し、前記能動型消音装置は、前記第二仮想信号を予め設定された第二変換フィルタによって信号処理することにより第二変換仮想信号を生成する第二変換仮想信号生成部をさらに備え、前記第二仮想誤差算出部は、前記第二変換仮想信号および前記第四仮想信号に基づいて、前記第二仮想誤差を算出するようにしても良い。
【0017】
ここで、低減対象音における誤差検出位置から消音評価位置までの伝達関数と制御音における誤差検出位置から消音評価位置までの伝達関数とは一致しないことがある。そこで、制御音における誤差検出位置から消音評価位置までの伝達関数の一部を第一変換フィルタとして予め設定しておき、低減対象音における誤差検出位置から消音評価位置までの伝達関数の一部を第二変換フィルタとして予め設定しておく。つまり、低減対象音と制御音のそれぞれの伝達関数に応じたフィルタにより信号処理を行い、第二仮想誤差を算出している。従って、両者の伝達関数が一致しない場合であっても、確実に消音評価位置における騒音を低減できる。
【0018】
また、前記誤差マイクは、前記消音評価位置に対して固定した位置に設置し、前記制御音発生装置に対して相対的に移動可能な位置に設置してもよい。誤差マイクと消音評価位置との相対位置を固定的にすることで、誤差検出位置と消音評価位置との間の伝達関数がほとんど変化しないようにできる。従って、誤差検出位置の実誤差に基づいて、消音評価位置における第二仮想誤差を高精度に算出できる。その結果、消音評価位置における騒音を確実に低減できる。
【0019】
また、前記消音評価位置は、人間の耳元であり、前記誤差マイクは、当該人間の頭部または首部に身につける物に装着されるようにしてもよい。ここで、誤差マイクが装着される頭部または首部の位置は、消音評価位置である耳元を除いた位置となる。従って、消音評価位置である耳元の近傍である頭部または首部に身につける物に、誤差マイクを装着することで、誤差検出位置と消音評価位置との間の伝達関数の変化が極めて小さい。これにより、消音評価位置である耳元の騒音を確実に低減できる。なお、人間の頭部または首部に身につける物としては、例えば、眼鏡の柄、眼鏡の縁、帽子、ネックレス、イヤリングおよびピアスなどが含まれる。
【図面の簡単な説明】
【0020】
【図1】能動型消音装置の適用概要図である。
【図2】能動型消音装置のモデル概要図である。
【図3】第一実施形態:能動型消音装置のブロック線図である。
【図4】第二実施形態:能動型消音装置のブロック線図である。
【発明を実施するための形態】
【0021】
<第一実施形態>
(能動型消音装置の概要)
能動型消音装置は、消音評価位置において、騒音源から発生された低減対象音xを能動的に低減する装置である。この能動型消音装置の適用例としては、以下のとおりである。例えば、建物外にて発生した騒音を、建物内にいる人間の耳元にて消音することに適用できる。また、当該装置は、自動車などにおいて、エンジンから発生する騒音やロードノイズ(路面から伝達されるノイズ)を、乗員の耳元にて消音することに適用できる。
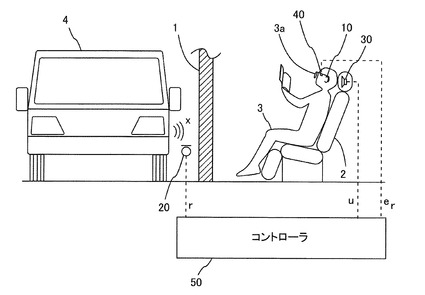
【0022】
ここで、本実施形態としては、前者の場合を例にあげて図1を参照して説明する。図1に示すように、建物内(外壁面1より室内側)に配置されているリクライニングチェア2に居住者3が着座して、読書や音楽鑑賞をしながらくつろいでいる状態である。建物外(外壁面1より屋外側)には自動車4、歩行者および各種動物などが移動する。ここでは、騒音源として、建物外における自動車4、歩行者および各種動物などとする。なお、図1においては、自動車4のみを図示する。
【0023】
つまり、建物外の騒音によって室内の居住者3が不快に感じないようにするために、能動型消音装置によって、室内の居住者3の耳元にて、建物外の騒音源から発生された低減対象音xを消音する。特に、当該装置は、室内の居住者3がリクライニングチェア2に着座しているときのみならず、室内の他の場所にいる場合にも、低減対象音xを消音することができるようにする。
【0024】
この能動型消音装置は、適応アルゴリズムを用いて能動的に制御音を発生させることにより、消音評価位置10において騒音の影響を能動的に低減する。具体的には、図1に示すように、能動型消音装置は、参照マイク(参照信号生成部)20と、スピーカー(制御音発生装置)30と、誤差マイク40と、コントローラ50を備える。
【0025】
参照マイク20は、建物外に配置され、自動車4などの騒音源から発生された低減対象音xを検出して、適応アルゴリズムに用いるための参照信号rを生成する参照マイク(参照信号生成部)10を配置する。参照マイク20は、外壁面1より屋外側に設置している。参照マイク20は、室内に設置することもできるが、より早く低減対象音xを検出するために室外に設置している。
【0026】
なお、低減対象音xは、建物の外壁面1を通過して室内に伝達され、さらに居住者3の耳元へ伝達される。スピーカー30は、コントローラ50によって生成された制御信号uに応じた制御音を発生する。このスピーカー30は、例えば、リクライニングチェア2のヘッドレストに固定されている。そして、スピーカー30が発生する制御音は、居住者3の耳元へ伝達され、当該耳元において低減対象音xに干渉することで当該低減対象音xを低減するように作用する。
【0027】
誤差マイク40は、居住者3が頭部に装着している眼鏡3aの柄に設けられている。つまり、誤差マイク40が設けられている位置は、消音評価位置10である居住者3の耳元から僅かに離れている。ただし、眼鏡3aは居住者3の頭部に装着されているため、居住者3がリクライニングチェア2から移動した場合であっても、誤差マイク40と消音評価位置10とは、相対的に固定された位置となる。この誤差マイク40は、スピーカー30により発生された制御音と騒音源である自動車4により発生された低減対象音xとの干渉による実誤差erを検出する。つまり、誤差マイク40が設置される位置が、誤差検出位置となる。
【0028】
なお、本実施形態においては、誤差マイク40は、眼鏡3aの柄に設けたが、この他に、居住者3の頭部または首部に身につける物に装着すると良く、例えば、眼鏡3aの縁、帽子、ネックレス、イヤリングおよびピアスなどとしても良い。これらであれば、耳元からの距離が僅かであると共に、消音評価位置10である耳元に対して固定した位置に設けられている。また、誤差マイク40が外部に露出していることが望ましく、帽子の場合には表面側に露出するように設けると良い。なお、上記に比べると、離間距離および相対的な固定的な関係として劣るが、衣服や靴などに誤差マイク40を設けることもできる。
【0029】
コントローラ50は、参照マイク20により生成される参照信号rと、誤差マイク40により検出される実誤差erとに基づいて、適応アルゴリズムを用いて処理することにより、制御信号uを生成する。この制御信号uは、スピーカー30に出力され、スピーカー30の制御音を発生させるための信号となる。つまり、理想的には、消音評価位置10において、制御音の各周波数帯の位相を低減対象音xの対応する周波数帯の位相と逆位相とし、制御音の各周波数帯の振幅を低減対象音xの対応する周波数帯の振幅と同一にすることである。このようにできれば、消音評価位置10において、低減対象音xの影響を全くない状態にできる。
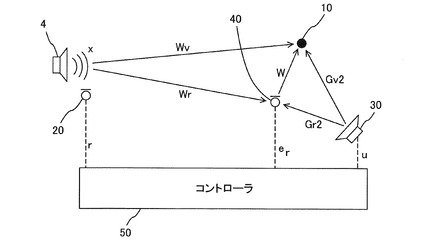
【0030】
次に、図2を参照して、能動型消音装置のモデル概要について説明する。図2に示すように、騒音源である自動車4から低減対象音xが発生する。低減対象音xは、伝達関数Wrを介して、誤差マイク40が設置される誤差検出位置に伝達される。また、低減対象音xは、伝達関数Wvを介して、消音評価位置10である耳元に伝達される。ここで、誤差マイク40が設置される誤差検出位置と消音評価位置10との伝達関数はWとしている。つまり、W=Wv/Wrである。
【0031】
一方、スピーカー30により発生される制御音は、伝達関数Gr2を介して、誤差マイク40が設置される誤差検出位置に伝達される。また、当該制御音は、伝達関数Gv2を介して、消音評価位置10である耳元に伝達される。ここで、誤差マイク40が設置される誤差検出位置と消音評価位置10との伝達関数はWとしている。つまり、ここでは、Wv/Wr=Gv2/Gr2としている。ただし、Wv/Wr=Gv2/Gr2でないことも考えられるため、この場合については、第二実施形態に説明する。
【0032】
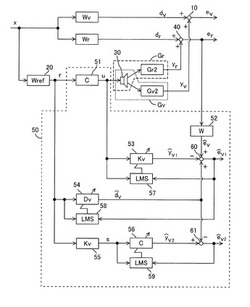
(能動型消音装置の詳細)
次に、図3のブロック線図を参照して、能動型消音装置の詳細構成について説明する。図3において、添え字「r」は、誤差マイク40が設置されている誤差検出位置に関することを意味し、添え字「v」は、消音評価位置10に関することを意味する。また、図3において、記号の上に付している「^」は、ハットと称し、推定値または仮想値を意味する。ただし、記載の都合上、以下の文章中においては、「^」を「h」として記載する。ただし、数式においては、「^」を用いる。
【0033】
低減対象音xが伝達関数Wvを介して消音評価位置10に伝達される。このときの伝達騒音はdvである。この関係は、式(1)にて表される。
【0034】
【数1】

【0035】
一方、コントローラ50において、制御信号生成部51が、参照マイク20(図3においては「Wref」と示す)により検出された参照信号rに対して制御信号用適応フィルタCによって信号処理することにより、電気信号である制御信号uを生成する。そして、スピーカー30が、当該制御信号uに応じた制御音を出力する。スピーカー30が発生した制御音は、伝達関数Gv2を介して消音評価位置10に伝達される。このときの伝達制御音はyvである。ここで、制御信号生成部51から消音評価位置10までの伝達関数は、Gvとする。上記の関係は、式(2)にて表される。
【0036】
【数2】
【0037】
そして、消音評価位置10における仮想誤差は、式(3)に示すように、evとなる。この仮想誤差evをゼロとすることができれば、居住者3(図1に示す)は屋外で発生した騒音を感じなくなる。
【0038】
【数3】
【0039】
しかし、消音評価位置10は、耳元であるため、誤差マイク40を設置することによる煩わしさが生じる。そこで、誤差マイク40は、図1を参照して上述したように、眼鏡3aの柄に装着している。つまり、誤差マイク40による誤差検出位置は、消音評価位置10とは異なる位置となる。そのため、消音評価位置10における仮想誤差evは、検出することができない。
【0040】
この誤差検出位置について、低減対象音xおよび制御音の関係について説明する。低減対象音xは、伝達関数Wrを介して誤差検出位置に伝達される。このときの伝達騒音はdrである。この関係は、式(4)にて表される。
【0041】
【数4】
【0042】
また、スピーカー30が、制御信号生成部51により生成された当該制御信号uに応じた制御音を出力する。このスピーカー30が発生した制御音は、伝達関数Gr2を介して誤差検出位置に伝達される。このときの伝達制御音はyrである。ここで、制御信号生成部51から誤差検出位置までの伝達関数は、Grとする。上記の関係は、式(5)にて表される。
【0043】
【数5】
【0044】
そして、誤差マイク40により検出される誤差検出位置における実誤差は、式(6)に示すように、erとなる。この実誤差erを用いて、消音評価位置10における仮想誤差evをゼロにするように、制御信号生成部51における制御信号用適応フィルタCを更新する。制御信号用適応フィルタCの更新方法の詳細について、以下に説明する。
【0045】
【数6】
【0046】
制御信号生成部51における制御信号用適応フィルタCの更新は、誤差検出位置における実誤差erを用いて、直接法の適応アルゴリズムを用いる。ここでは、直接法LMSアルゴリズムを用いる場合を例にあげる。なお、詳細な説明はしないが、直接法RLSアルゴリズム、直接法FDAアルゴリズムを適用できる。
【0047】
ここで、直接法ではない適応アルゴリズムであれば、伝達関数GvまたはGrを同定する必要があるが、本実施形態では直接法の適応アルゴリズムを用いるため、伝達関数GvまたはGrを同定する必要がない。具体的には、直接法の適応アルゴリズムを用いることで、伝達関数GvまたはGrに相当する適応フィルタを設置しておき、当該適応フィルタを適応アルゴリズムによって更新することで、当該適応フィルタを現在の伝達関数GvまたはGrに適応させることができる。
【0048】
参照信号r、制御信号u、実誤差er、制御信号用適応フィルタC、第一経路用適応フィルタKv、第二経路用適応フィルタDvを用いて、第一仮想誤差算出部60および第二仮想誤差算出部61のそれぞれにおいて、第一仮想誤差ehv1および第二仮想誤差ehv2のそれぞれを算出する。そして、算出した第一仮想誤差ehv1および第二仮想誤差ehv2に基づくLMSアルゴリズムにより、制御信号用適応フィルタC、第一経路用適応フィルタKv、第二経路用適応フィルタDvを更新する。ここで、第一仮想誤差ehv1および第二仮想誤差ehv2は、式(7)(8)により表される。
【0049】
【数7】
【0050】
【数8】
【0051】
式(7)における変換仮想誤差ehvは、変換仮想誤差算出部52において、実誤差erを予め設定された変換フィルタWによって信号処理することにより算出される。この関係は、式(9)にて表される。なお、以下において、式中の「*」は、畳み込み演算子である。
【0052】
【数9】
【0053】
式(7)における第一仮想信号yhv1は、第一仮想信号生成部53において、制御信号uを第一経路用適応フィルタKvによって信号処理することにより生成される。この関係は、式(10)にて表される。ここで、第一経路用適応フィルタKvは、伝達関数Gvに対応するフィルタである。
【0054】
【数10】
【0055】
式(7)(8)における第二仮想信号dhvは、第二仮想信号生成部54において、参照信号rを第二経路用適応フィルタDvによって信号処理することにより生成される。この関係は、式(11)にて表される。ここで、第二経路用適応フィルタDvは、伝達関数Wv/Wrefに対応するフィルタである。
【0056】
【数11】
【0057】
式(8)における第四仮想信号yhv2は、第四仮想信号生成部56において、第三仮想信号sを制御信号用適応フィルタCによって信号処理することにより生成される。この関係は、式(12)にて表される。
【0058】
【数12】
【0059】
式(12)における第三仮想信号sは、第三仮想信号生成部55において、参照信号rを第一経路用適応フィルタKvによって信号処理することにより生成される。この関係は、式(13)にて表される。
【0060】
【数13】
【0061】
従って、上記式(7)は、式(9)(10)(11)より、式(14)のように表され、式(8)は、式(11)(12)(13)より、式(15)のように表される。
【0062】
【数14】
【0063】
【数15】
【0064】
さらに、第一フィルタ更新部57により、LMSアルゴリズムを適用して、第一仮想誤差ehv1をゼロにするように第一経路用適応フィルタKvを更新する。具体的には、第一フィルタ更新部57は、制御信号uおよび第一仮想誤差ehv1に基づいてLMSアルゴリズムを適用することにより、第一経路用適応フィルタKvを更新する。
【0065】
この更新処理について詳細に説明する。まず、第一フィルタ更新部57において、評価関数J1を式(16)のように設定する。この評価関数J1が極小となるような第一経路用適応フィルタKvを求める。
【0066】
【数16】
【0067】
そこで、勾配ベクトル▽1(k)を式(17)のように設定する。勾配ベクトル▽1(k)は、評価関数J1(k)を第一経路用適応フィルタKv(k)で偏微分して得られる。そうすると、勾配ベクトル▽1(k)は、式(17)の第二行の右辺に示すように表される。さらに、式(14)より、勾配ベクトル▽1(k)は、式(17)の第三行の右辺に示すように表される。以下において、添え字(k)は、サンプリング数(時間ステップ)を表す。
【0068】
【数17】
【0069】
そして、更新後の第一経路用適応フィルタKv(k+1)は、式(18)の第一行に示すように、算出した勾配ベクトル▽1(k)にステップサイズパラメータμ1を乗じた項を、前回更新された第一経路用適応フィルタKv(k)から減算することにより導き出す。そして、式(17)を代入すると、第一経路用適応フィルタKvの更新式は、式(18)の第二行に示すように表される。
【0070】
【数18】
【0071】
また、第二フィルタ更新部58により、LMSアルゴリズムを適用して、第一仮想誤差ehv1をゼロにするように第二経路用適応フィルタDvを更新する。具体的には、第二フィルタ更新部58は、参照信号rおよび第一仮想誤差ehv1に基づいてLMSアルゴリズムを適用することにより、第二経路用適応フィルタDvを更新する。
【0072】
この更新処理について詳細に説明する。第二フィルタ更新部58においては、第一フィルタ更新部57と同様に、評価関数J1を上述した式(16)のように設定する。そして、この評価関数J1が極小となるような第二経路用適応フィルタDvを求める。そこで、勾配ベクトル▽2(k)を式(19)のように設定する。当該勾配ベクトル▽2(k)は、評価関数J1(k)を第二経路用適応フィルタDv(k)で偏微分して得られる。そうすると、勾配ベクトル▽2(k)は、式(19)の第二行の右辺に示すように表される。さらに、式(14)より、勾配ベクトル▽2(k)は、式(19)の第三行の右辺に示すように表される。
【0073】
【数19】
【0074】
そして、更新後の第二経路用適応フィルタDv(k+1)は、式(20)の第一行に示すように、算出した勾配ベクトル▽2(k)にステップサイズパラメータμ2を乗じた項を、前回更新された第二経路用適応フィルタDv(k)から減算することにより導き出す。そして、式(19)を代入すると、第二経路用適応フィルタDvの更新式は、式(20)の第二行に示すように表される。
【0075】
【数20】
【0076】
さらに、制御信号用フィルタ更新部59により、LMSアルゴリズムを適用して、第二仮想誤差ehv2をゼロにするように制御信号用適応フィルタCを更新する。具体的には、制御信号用フィルタ更新部59は、第三仮想信号sおよび第二仮想誤差ehv2に基づいてLMSアルゴリズムを適用することにより、制御信号用適応フィルタCを更新する。
【0077】
この更新処理について詳細に説明する。まず、制御信号用フィルタ更新部59において、評価関数J2を式(21)のように設定する。この評価関数J2が極小となるような制御信号用適応フィルタCを求める。
【0078】
【数21】
【0079】
そこで、勾配ベクトル▽3(k)を式(22)のように設定する。当該勾配ベクトル▽3(k)は、評価関数J2(k)を制御信号用適応フィルタC(k)で偏微分して得られる。そうすると、勾配ベクトル▽3(k)は、式(22)の第二行の右辺に示すように表される。さらに、式(15)より、勾配ベクトル▽3(k)は、式(22)の第三行の右辺に示すように表される。
【0080】
【数22】
【0081】
そして、更新後の制御信号用適応フィルタC(k+1)は、式(23)の第一行に示すように、算出した勾配ベクトル▽3(k)にステップサイズパラメータμ3を乗じた項を、前回更新された制御信号用適応フィルタC(k)から減算することにより導き出す。そして、式(22)を代入すると、制御信号用適応フィルタCの更新式は、式(23)の第二行に示すように表される。
【0082】
【数23】
【0083】
上述したように、第一フィルタ更新部57および第二フィルタ更新部58において、消音評価位置10における誤差に相当する第一仮想誤差ehv1をゼロにするように、第一経路用適応フィルタKvおよび第二経路用適応フィルタDvを更新している。さらに、制御信号用フィルタ更新部59において、消音評価位置10における誤差に相当する第二仮想誤差ehv2をゼロにするように、制御信号用適応フィルタCを更新している。
【0084】
ここで、第一仮想誤差ehv1および第二仮想誤差ehv2の和を考える。当該和の式を展開すると、式(24)に示すようになる。
【0085】
【数24】
【0086】
式(24)より、ehv1およびehv2がゼロに収束し、CおよびKvがある一定値に収束する場合には、右辺の第二項と第三項がキャンセルされ、(W*er)がゼロに収束する。つまり、変換フィルタWの設定を高精度に行うことで、(W*er)に対応する消音評価位置10における誤差evをゼロに収束させることができる。
【0087】
以上説明したように、本実施形態によれば、制御信号用適応フィルタCは、誤差検出位置における騒音をゼロにするように更新するのではなく、誤差検出位置とは異なる消音評価位置10における騒音をゼロにするように更新している。従って、消音評価位置10に誤差マイク40を設置しなくても、消音評価位置10における騒音をゼロにすることができる。そして、消音評価位置10は人間の耳元であるため、人間の耳元に何ら装着することなく、人間の耳元に発生する騒音を低減することができる。
【0088】
さらに、本実施形態によれば、制御信号用適応フィルタCの更新に、直接法の適応アルゴリズムを適用している。ここで、直接法ではない単純適応アルゴリズムによれば、制御信号生成部51と評価点との間の伝達関数Gを予め同定しておき、当該伝達関数Gの推定値を用いて適応フィルタを更新する。このように、直接法の適応アルゴリズムでなければ、伝達関数Gを予め同定しておく必要があり、伝達関数Gの推定値の精度によって、制御性能が変化する。
【0089】
これに対して、本実施形態によれば、直接法の適応アルゴリズムを用いて、具体的には第一仮想誤差ehv1および第二仮想誤差ehv2を用いて、制御信号用適応フィルタCを更新している。つまり、制御信号用適応フィルタCを更新するために、制御信号生成部51と消音評価位置10との間の伝達関数Gvを予め同定する必要がない。さらに、当該伝達関数Gvが変化したとしても、直接法の適応アルゴリズムを用いることにより、制御信号用適応フィルタCが現在の伝達関数Gvに応じた値に追従できる。
【0090】
例えば、制御音を発生するスピーカー30を固定した場所に設置したときに、消音評価位置10である人間の耳元が移動した場合には、制御信号生成部51と人間の耳元との間の伝達関数Gvが変化する。このように、スピーカー30を固定した場所に設置し、消音対象の人間が移動したとしても、制御信号用適応フィルタCが当該伝達関数Gvに応じた値に追従するため、確実に人間の耳元における騒音を低減することができる。従って、伝達関数の同定をすることなく、誤差マイク40を設置している位置とは異なる消音評価位置10における騒音を低減することができる。つまり、誤差マイク40を耳元から離れた位置に設置したとしても、確実に耳元の騒音を低減できる。
【0091】
また、誤差マイク40を眼鏡3aの柄に設置しているため、誤差マイク40と消音評価位置10である耳元との相対的な位置が固定されている。従って、誤差マイク40による誤差検出位置と消音評価位置10との間の伝達関数がほとんど変化しない。従って、誤差マイク40により検出された実誤差に基づいて、消音評価位置10における第一仮想誤差ehv1および第二仮想誤差ehv2を高精度に算出できる。その結果、消音評価位置10における騒音を確実に低減できる。
【0092】
特に、誤差マイク40を眼鏡3aの柄に設置しており、誤差マイク40と消音評価位置10である耳元との距離が近い。従って、誤差マイク40が設置される誤差検出位置と消音評価位置10との間の伝達関数の変化が極めて小さい。これにより、消音評価位置10である耳元の騒音を確実に低減できる。
【0093】
また、本実施形態においては、Wv/Wr=Gv2/Gr2であるとして、変換フィルタWを用いた処理を行っている。上述したように、誤差マイク40と消音評価位置10である耳元との相対的な位置が固定されている。そのため、ほぼWv/Wr=Gv2/Gr2の関係となるため、このような前提としても十分に効果を発揮できる。特に、誤差マイク40と消音評価位置10との距離が非常に短い。このことからも、より上記の関係となるため、十分に効果を発揮できる。
【0094】
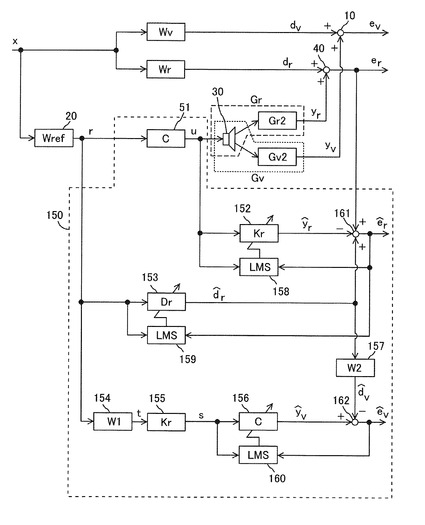
<第二実施形態>
第二実施形態の能動型消音装置の構成について、図4を参照して説明する。図4において、添え字「r」は、誤差マイク40が設置されている誤差検出位置に関することを意味し、添え字「v」は、消音評価位置10に関することを意味する。第二実施形態の能動型消音装置は、第一実施形態の能動型消音装置に対して、コントローラ150における制御信号用適応フィルタCの更新処理が相違する。以下、コントローラ150における当該更新処理について説明する。なお、以下の説明において、第一実施形態と同一構成について同一符号を付して説明を省略する。ここで、第一実施形態のコントローラ50において、Wv/Wr=Gv2/Gr2として、変換フィルタWを用いた更新処理を行った。これに対して、第二実施形態のコントローラ150は、Wv/Wr=Gv2/Gr2ではないとして、第一変換フィルタW1および第二変換フィルタW2を用いた更新処理を行う。
【0095】
制御信号生成部51における制御信号用適応フィルタCの更新は、誤差検出位置における実誤差erを用いて、直接法の適応アルゴリズムを用いる。ここでは、直接法LMSアルゴリズムを用いる場合を例にあげる。なお、詳細な説明はしないが、直接法RLSアルゴリズム、直接法FDAアルゴリズムを適用できる。
【0096】
参照信号r、制御信号u、実誤差er、制御信号用適応フィルタC、第一経路用適応フィルタKr、第二経路用適応フィルタDrを用いて、第一仮想誤差算出部161および第二仮想誤差算出部162のそれぞれにおいて、第一仮想誤差ehrおよび第二仮想誤差ehvのそれぞれを算出する。そして、算出した第一仮想誤差ehrおよび第二仮想誤差ehvに基づくLMSアルゴリズムにより、制御信号用適応フィルタC、第一経路用適応フィルタKr、第二経路用適応フィルタDrを更新する。ここで、第一仮想誤差ehrおよび第二仮想誤差ehvは、式(25)(26)により表される。
【0097】
【数25】
【0098】
【数26】
【0099】
式(25)における第一仮想信号yhrは、第一仮想信号生成部152において、制御信号uを第一経路用適応フィルタKrによって信号処理することにより生成される。この関係は、式(27)にて表される。ここで、第一経路用適応フィルタKrは、伝達関数Grに対応するフィルタである。なお、以下において、式中の「*」は、畳み込み演算子である。
【0100】
【数27】
【0101】
式(25)における第二仮想信号dhvは、第二仮想信号生成部153において、参照信号rを第二経路用適応フィルタDrによって信号処理することにより生成される。この関係は、式(28)にて表される。ここで、第二経路用適応フィルタDrは、伝達関数Wrに対応するフィルタである。
【0102】
【数28】
【0103】
式(26)における第四仮想信号yhvは、第四仮想信号生成部156において、第三仮想信号sを制御信号用適応フィルタCによって信号処理することにより生成される。この関係は、式(29)にて表される。
【0104】
【数29】
【0105】
式(29)における第三仮想信号sは、以下のように生成される。まず、第一変換仮想信号算出部154において、参照信号rを第一変換フィルタW1によって信号処理して生成された第一変換仮想信号tを生成される。そして、第三仮想信号生成部155において、第一変換仮想信号tを第一経路用適応フィルタKrによって信号処理することにより生成される。この関係は、式(30)にて表される。
【0106】
【数30】
【0107】
式(26)における第二変換仮想信号dhvは、第二変換仮想信号算出部157において、第二仮想信号dhrを第二変換フィルタW2によって信号処理することにより生成される。この関係は、式(31)にて表される。
【0108】
【数31】
【0109】
従って、上記式(25)は、式(27)(28)より、式(32)のように表され、式(26)は、式(28)〜(31)より、式(33)のように表される。
【0110】
【数32】
【0111】
【数33】
【0112】
さらに、第一フィルタ更新部158により、LMSアルゴリズムを適用して、第一仮想誤差ehrをゼロにするように第一経路用適応フィルタKrを更新する。具体的には、第一フィルタ更新部158は、制御信号uおよび第一仮想誤差ehrに基づいてLMSアルゴリズムを適用することにより、第一経路用適応フィルタKrを更新する。この更新処理は、第一実施形態の第一フィルタ更新部57の更新処理とほぼ同様であるため、説明を省略する。
【0113】
また、第二フィルタ更新部159により、LMSアルゴリズムを適用して、第一仮想誤差ehrをゼロにするように第二経路用適応フィルタDrを更新する。具体的には、第二フィルタ更新部159は、参照信号rおよび第一仮想誤差ehrに基づいてLMSアルゴリズムを適用することにより、第二経路用適応フィルタDrを更新する。この更新処理は、第一実施形態の第二フィルタ更新部58の更新処理とほぼ同様であるため、説明を省略する。
【0114】
さらに、制御信号用フィルタ更新部160により、LMSアルゴリズムを適用して、第二仮想誤差ehvをゼロにするように制御信号用適応フィルタCを更新する。具体的には、制御信号用フィルタ更新部160は、第三仮想信号sおよび第二仮想誤差ehvに基づいてLMSアルゴリズムを適用することにより、制御信号用適応フィルタCを更新する。この更新処理は、第一実施形態の制御信号用フィルタ更新部59の更新処理とほぼ同様であるため、説明を省略する。
【0115】
本実施形態によれば、第一変換フィルタW1が、Gv2/Gr2に対応するフィルタであり、第二変換フィルタW2が、Wv/Wrに対応するフィルタである。このように、第一変換フィルタW1と第二変換フィルタW2をそれぞれ設定することにより、Wv/Wr=Gv2/Gr2でない場合であっても、確実に消音評価位置10における騒音を低減できる。
【0116】
ここで、第二変換フィルタW2のゲインおよび位相を変化させたシミュレーションを行った。その結果、第二変換フィルタW2のゲインの誤差が大きくなりすぎると、消音評価位置10における騒音は大きくなる傾向にあり、また第二変換フィルタW2の位相の誤差が大きくなりすぎた場合にも、消音評価位置10における騒音が大きくなる傾向にあった。つまり、第一変換フィルタW1および第二変換フィルタW2を調整することで、第二実施形態の処理であっても、消音評価位置10における騒音の低減効果が見られることが分かった。従って、本実施形態によれば、低減対象音xにおける誤差検出位置から消音評価位置10までの伝達関数と制御音における誤差検出位置から消音評価位置10までの伝達関数とが一致しない場合であっても、確実に消音評価位置における騒音を低減できる。
【符号の説明】
【0117】
1:外壁面、 2:リクライニングチェア、 3:居住者、 3a:眼鏡、 4:自動車
10:消音評価位置、 20:参照マイク、 30:スピーカー、 40:誤差マイク
50:コントローラ、 51:制御信号生成部、 52:変換仮想誤差算出部
53:第一仮想信号生成部、 54:第二仮想信号生成部、 55:第三仮想信号生成部
56:第四仮想信号生成部、 57:第一フィルタ更新部、 58:第二フィルタ更新部
59:制御信号用フィルタ更新部、 60:第一仮想誤差算出部
61:第二仮想誤差算出部
150:コントローラ、 152:第一仮想信号生成部、 153:第二仮想信号生成部
154:第一変換仮想信号算出部、 155:第三仮想信号生成部
156:第四仮想信号生成部、 157:第二変換仮想信号算出部
158:第一フィルタ更新部、 159:第二フィルタ更新部
160:制御信号用フィルタ更新部、 161:第一仮想誤差算出部
162:第二仮想誤差算出部
【技術分野】
【0001】
本発明は、誤差マイクおよび制御音発生装置(スピーカ)を用いて、評価位置における騒音源からの音を能動的に低減する能動型消音装置に関するものである。
【背景技術】
【0002】
この種の装置として、例えば、特許文献1〜5には、耳元に誤差マイクを設置して、耳元近傍の騒音を低減する能動型消音装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−266374号公報
【特許文献2】特開2006−181257号公報
【特許文献3】特開2007−93962号公報
【特許文献4】特開2008−216375号公報
【特許文献5】特開2009−269530号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、人間の耳元に誤差マイクを設置するのは煩わしさがあるため、耳元に設置することなく、耳元の騒音を低減することが望まれる。一方、誤差マイクを耳元から離した場所に設置すると、耳元における騒音を低減する効果が低い。
【0005】
本発明は、このような事情に鑑みてなされたものであり、耳元に誤差マイクを設置することなく、耳元における騒音を高精度に低減することができる能動型消音装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、伝達関数を予め同定する必要のない直接法の適応アルゴリズムを適用すると共に、誤差検出位置とは異なる消音評価位置における仮想誤差をゼロとするように制御信号用適応フィルタを直接法の適応アルゴリズムにより更新する。
【0007】
具体的には、本発明の能動型消音装置は、誤差検出位置とは異なる消音評価位置において、音源から発生された低減対象音を能動的に低減する能動型消音装置であって、前記低減対象音を検出して参照信号を生成する参照信号生成部と、前記参照信号を制御信号用適応フィルタによって信号処理することにより制御信号を生成する制御信号生成部と、前記制御信号生成部により生成された前記制御信号に応じた制御音を発生する制御音発生装置と、前記誤差検出位置に配置され、前記誤差検出位置において前記制御音発生装置により発生された前記制御音と前記音源により発生された前記低減対象音との干渉による実誤差を検出する誤差マイクと、前記参照信号、前記実誤差および仮想適応フィルタに基づいて第一仮想誤差を算出する第一仮想誤差算出部と、前記第一仮想誤差をゼロにするように、前記仮想適応フィルタを更新する仮想適応フィルタ更新部と、前記参照信号、前記仮想適応フィルタおよび前記制御信号用適応フィルタに基づいて前記消音評価位置における誤差としての第二仮想誤差を算出する第二仮想誤差算出部と、前記第二仮想誤差をゼロにするように、前記制御信号用適応フィルタを更新する制御信号用適応フィルタ更新部とを備える。
【0008】
本発明によれば、制御信号用適応フィルタは、誤差検出位置における騒音をゼロにするように更新するのではなく、誤差検出位置とは異なる消音評価位置における騒音をゼロにするように更新している。従って、消音評価位置に誤差マイクを設置しなくても、消音評価位置における騒音をゼロにすることができる。そして、消音評価位置は人間の耳元であるため、人間の耳元に何ら装着することなく、人間の耳元に発生する騒音を低減することができる。
【0009】
さらに、本発明によれば、制御信号用適応フィルタの更新に、直接法の適応アルゴリズムを適用している。ここで、直接法の適応アルゴリズム(Direct Adaptive Algorithm,DAA)は、直接法LMSアルゴリズム、直接法RLSアルゴリズム、直接法FDAアルゴリズムなどである。また、直接法ではない適応アルゴリズムとしては、単純LMSアルゴリズム(Filtered-x LMSアルゴリズムを含む意味である)、単純RLSアルゴリズム、単純FDAアルゴリズムなどである。直接法ではない単純適応アルゴリズムによれば、制御信号生成部と評価点との間の伝達関数Gを予め同定しておき、当該伝達関数Gの推定値を用いて適応フィルタを更新する。このように、直接法の適応アルゴリズムでなければ、伝達関数Gを予め同定しておく必要があり、伝達関数Gの推定値の精度によって、制御性能が変化する。
【0010】
これに対して、本発明は、直接法の適応アルゴリズムを用いて、具体的には第一仮想誤差および第二仮想誤差を用いて、制御信号用適応フィルタを更新している。つまり、制御信号用適応フィルタを更新するために、制御信号生成部と消音評価位置との間の伝達関数Gvを予め同定する必要がない。さらに、当該伝達関数Gvが変化したとしても、本発明による直接法の適応アルゴリズムを用いることにより、制御信号用適応フィルタが現在の伝達関数Gvに応じた値に追従できる。
【0011】
例えば、制御音発生装置を固定した場所に設置したときに、消音評価位置である人間の耳元が移動した場合には、制御信号生成部と人間の耳元との間の伝達関数Gv(制御音発生装置と人間の耳元との間の伝達関数を一部に含む伝達関数である)が変化する。制御音発生装置を固定した場所に設置し、消音対象の人間が移動したとしても、本発明によれば、制御信号用適応フィルタが当該伝達関数Gvに応じた値に追従するため、確実に人間の耳元における騒音を低減することができる。従って、本発明によれば、伝達関数の同定をすることなく、誤差マイクを設置している位置とは異なる消音評価位置における騒音を低減することができる。つまり、誤差マイクを耳元から離れた位置に設置したとしても、確実に耳元の騒音を低減できる。
【0012】
また、本発明において、以下のようにしても良い。前記能動型消音装置は、前記制御信号を第一経路用適応フィルタによって信号処理することにより第一仮想信号を生成する第一仮想信号生成部と、前記参照信号を第二経路用適応フィルタによって信号処理することにより第二仮想信号を生成する第二仮想信号生成部と、前記参照信号を前記第一経路用適応フィルタによって信号処理することにより第三仮想信号を生成する第三仮想信号生成部と、前記第三仮想信号を前記制御信号用適応フィルタによって信号処理することにより第四仮想信号を生成する第四仮想信号生成部とを備える。前記第一仮想誤差算出部は、前記誤差マイクにより検出される実誤差、前記第一仮想信号および前記第二仮想信号に基づいて、前記第一仮想誤差を算出し、前記第二仮想誤差算出部は、前記第二仮想信号および前記第四仮想信号に基づいて、前記第二仮想誤差を算出する。前記仮想適応フィルタ更新部は、前記制御信号および前記第一仮想誤差に基づいて、前記第一仮想誤差をゼロにするように前記第一経路用適応フィルタを更新する第一フィルタ更新部と、前記参照信号および前記第一仮想誤差に基づいて、前記第一仮想誤差をゼロにするように前記第二経路用適応フィルタを更新する第二フィルタ更新部とを備える。そして、前記制御信号用フィルタ更新部は、前記第三仮想信号および前記第二仮想誤差に基づいて、前記第二仮想誤差をゼロにするように前記制御信号用フィルタを更新する。
【0013】
このような構成とすることにより、伝達関数を同定することなく、消音評価位置における仮想誤差をゼロにするように、制御信号用適応フィルタを直接法の適応アルゴリズムにより更新することが確実にできる。
【0014】
また、前記能動型消音装置は、前記実誤差を予め設定された変換フィルタによって信号処理することにより変換仮想誤差を算出する変換仮想誤差算出部をさらに備え、前記第一仮想誤差算出部は、前記変換仮想誤差、前記第一仮想信号および前記第二仮想信号に基づいて前記第一仮想誤差を算出するようにしても良い。
【0015】
当該変換フィルタは、低減対象音における誤差検出位置から消音評価位置までの伝達関数と制御音における誤差検出位置から消音評価位置までの伝達関数とが一致するときに、当該伝達関数に相当するものとなる。つまり、両者の伝達関数がほぼ一致することを前提として、第一仮想誤差を算出している。従って、両者の伝達関数がほぼ一致する場合には、確実に消音評価位置における騒音を低減できる。特に、誤差検出位置と消音評価位置とが相対的に固定されている場合には、上述した両者の伝達関数がほぼ一致することが多い。従って、当該状態であれば、確実に消音評価位置における騒音を低減できる。
【0016】
また、前記第三仮想信号生成部は、前記参照信号を前記第一経路用適応フィルタおよび予め設定された第一変換フィルタによって信号処理することにより前記第三仮想信号を生成し、前記能動型消音装置は、前記第二仮想信号を予め設定された第二変換フィルタによって信号処理することにより第二変換仮想信号を生成する第二変換仮想信号生成部をさらに備え、前記第二仮想誤差算出部は、前記第二変換仮想信号および前記第四仮想信号に基づいて、前記第二仮想誤差を算出するようにしても良い。
【0017】
ここで、低減対象音における誤差検出位置から消音評価位置までの伝達関数と制御音における誤差検出位置から消音評価位置までの伝達関数とは一致しないことがある。そこで、制御音における誤差検出位置から消音評価位置までの伝達関数の一部を第一変換フィルタとして予め設定しておき、低減対象音における誤差検出位置から消音評価位置までの伝達関数の一部を第二変換フィルタとして予め設定しておく。つまり、低減対象音と制御音のそれぞれの伝達関数に応じたフィルタにより信号処理を行い、第二仮想誤差を算出している。従って、両者の伝達関数が一致しない場合であっても、確実に消音評価位置における騒音を低減できる。
【0018】
また、前記誤差マイクは、前記消音評価位置に対して固定した位置に設置し、前記制御音発生装置に対して相対的に移動可能な位置に設置してもよい。誤差マイクと消音評価位置との相対位置を固定的にすることで、誤差検出位置と消音評価位置との間の伝達関数がほとんど変化しないようにできる。従って、誤差検出位置の実誤差に基づいて、消音評価位置における第二仮想誤差を高精度に算出できる。その結果、消音評価位置における騒音を確実に低減できる。
【0019】
また、前記消音評価位置は、人間の耳元であり、前記誤差マイクは、当該人間の頭部または首部に身につける物に装着されるようにしてもよい。ここで、誤差マイクが装着される頭部または首部の位置は、消音評価位置である耳元を除いた位置となる。従って、消音評価位置である耳元の近傍である頭部または首部に身につける物に、誤差マイクを装着することで、誤差検出位置と消音評価位置との間の伝達関数の変化が極めて小さい。これにより、消音評価位置である耳元の騒音を確実に低減できる。なお、人間の頭部または首部に身につける物としては、例えば、眼鏡の柄、眼鏡の縁、帽子、ネックレス、イヤリングおよびピアスなどが含まれる。
【図面の簡単な説明】
【0020】
【図1】能動型消音装置の適用概要図である。
【図2】能動型消音装置のモデル概要図である。
【図3】第一実施形態:能動型消音装置のブロック線図である。
【図4】第二実施形態:能動型消音装置のブロック線図である。
【発明を実施するための形態】
【0021】
<第一実施形態>
(能動型消音装置の概要)
能動型消音装置は、消音評価位置において、騒音源から発生された低減対象音xを能動的に低減する装置である。この能動型消音装置の適用例としては、以下のとおりである。例えば、建物外にて発生した騒音を、建物内にいる人間の耳元にて消音することに適用できる。また、当該装置は、自動車などにおいて、エンジンから発生する騒音やロードノイズ(路面から伝達されるノイズ)を、乗員の耳元にて消音することに適用できる。
【0022】
ここで、本実施形態としては、前者の場合を例にあげて図1を参照して説明する。図1に示すように、建物内(外壁面1より室内側)に配置されているリクライニングチェア2に居住者3が着座して、読書や音楽鑑賞をしながらくつろいでいる状態である。建物外(外壁面1より屋外側)には自動車4、歩行者および各種動物などが移動する。ここでは、騒音源として、建物外における自動車4、歩行者および各種動物などとする。なお、図1においては、自動車4のみを図示する。
【0023】
つまり、建物外の騒音によって室内の居住者3が不快に感じないようにするために、能動型消音装置によって、室内の居住者3の耳元にて、建物外の騒音源から発生された低減対象音xを消音する。特に、当該装置は、室内の居住者3がリクライニングチェア2に着座しているときのみならず、室内の他の場所にいる場合にも、低減対象音xを消音することができるようにする。
【0024】
この能動型消音装置は、適応アルゴリズムを用いて能動的に制御音を発生させることにより、消音評価位置10において騒音の影響を能動的に低減する。具体的には、図1に示すように、能動型消音装置は、参照マイク(参照信号生成部)20と、スピーカー(制御音発生装置)30と、誤差マイク40と、コントローラ50を備える。
【0025】
参照マイク20は、建物外に配置され、自動車4などの騒音源から発生された低減対象音xを検出して、適応アルゴリズムに用いるための参照信号rを生成する参照マイク(参照信号生成部)10を配置する。参照マイク20は、外壁面1より屋外側に設置している。参照マイク20は、室内に設置することもできるが、より早く低減対象音xを検出するために室外に設置している。
【0026】
なお、低減対象音xは、建物の外壁面1を通過して室内に伝達され、さらに居住者3の耳元へ伝達される。スピーカー30は、コントローラ50によって生成された制御信号uに応じた制御音を発生する。このスピーカー30は、例えば、リクライニングチェア2のヘッドレストに固定されている。そして、スピーカー30が発生する制御音は、居住者3の耳元へ伝達され、当該耳元において低減対象音xに干渉することで当該低減対象音xを低減するように作用する。
【0027】
誤差マイク40は、居住者3が頭部に装着している眼鏡3aの柄に設けられている。つまり、誤差マイク40が設けられている位置は、消音評価位置10である居住者3の耳元から僅かに離れている。ただし、眼鏡3aは居住者3の頭部に装着されているため、居住者3がリクライニングチェア2から移動した場合であっても、誤差マイク40と消音評価位置10とは、相対的に固定された位置となる。この誤差マイク40は、スピーカー30により発生された制御音と騒音源である自動車4により発生された低減対象音xとの干渉による実誤差erを検出する。つまり、誤差マイク40が設置される位置が、誤差検出位置となる。
【0028】
なお、本実施形態においては、誤差マイク40は、眼鏡3aの柄に設けたが、この他に、居住者3の頭部または首部に身につける物に装着すると良く、例えば、眼鏡3aの縁、帽子、ネックレス、イヤリングおよびピアスなどとしても良い。これらであれば、耳元からの距離が僅かであると共に、消音評価位置10である耳元に対して固定した位置に設けられている。また、誤差マイク40が外部に露出していることが望ましく、帽子の場合には表面側に露出するように設けると良い。なお、上記に比べると、離間距離および相対的な固定的な関係として劣るが、衣服や靴などに誤差マイク40を設けることもできる。
【0029】
コントローラ50は、参照マイク20により生成される参照信号rと、誤差マイク40により検出される実誤差erとに基づいて、適応アルゴリズムを用いて処理することにより、制御信号uを生成する。この制御信号uは、スピーカー30に出力され、スピーカー30の制御音を発生させるための信号となる。つまり、理想的には、消音評価位置10において、制御音の各周波数帯の位相を低減対象音xの対応する周波数帯の位相と逆位相とし、制御音の各周波数帯の振幅を低減対象音xの対応する周波数帯の振幅と同一にすることである。このようにできれば、消音評価位置10において、低減対象音xの影響を全くない状態にできる。
【0030】
次に、図2を参照して、能動型消音装置のモデル概要について説明する。図2に示すように、騒音源である自動車4から低減対象音xが発生する。低減対象音xは、伝達関数Wrを介して、誤差マイク40が設置される誤差検出位置に伝達される。また、低減対象音xは、伝達関数Wvを介して、消音評価位置10である耳元に伝達される。ここで、誤差マイク40が設置される誤差検出位置と消音評価位置10との伝達関数はWとしている。つまり、W=Wv/Wrである。
【0031】
一方、スピーカー30により発生される制御音は、伝達関数Gr2を介して、誤差マイク40が設置される誤差検出位置に伝達される。また、当該制御音は、伝達関数Gv2を介して、消音評価位置10である耳元に伝達される。ここで、誤差マイク40が設置される誤差検出位置と消音評価位置10との伝達関数はWとしている。つまり、ここでは、Wv/Wr=Gv2/Gr2としている。ただし、Wv/Wr=Gv2/Gr2でないことも考えられるため、この場合については、第二実施形態に説明する。
【0032】
(能動型消音装置の詳細)
次に、図3のブロック線図を参照して、能動型消音装置の詳細構成について説明する。図3において、添え字「r」は、誤差マイク40が設置されている誤差検出位置に関することを意味し、添え字「v」は、消音評価位置10に関することを意味する。また、図3において、記号の上に付している「^」は、ハットと称し、推定値または仮想値を意味する。ただし、記載の都合上、以下の文章中においては、「^」を「h」として記載する。ただし、数式においては、「^」を用いる。
【0033】
低減対象音xが伝達関数Wvを介して消音評価位置10に伝達される。このときの伝達騒音はdvである。この関係は、式(1)にて表される。
【0034】
【数1】
【0035】
一方、コントローラ50において、制御信号生成部51が、参照マイク20(図3においては「Wref」と示す)により検出された参照信号rに対して制御信号用適応フィルタCによって信号処理することにより、電気信号である制御信号uを生成する。そして、スピーカー30が、当該制御信号uに応じた制御音を出力する。スピーカー30が発生した制御音は、伝達関数Gv2を介して消音評価位置10に伝達される。このときの伝達制御音はyvである。ここで、制御信号生成部51から消音評価位置10までの伝達関数は、Gvとする。上記の関係は、式(2)にて表される。
【0036】
【数2】
【0037】
そして、消音評価位置10における仮想誤差は、式(3)に示すように、evとなる。この仮想誤差evをゼロとすることができれば、居住者3(図1に示す)は屋外で発生した騒音を感じなくなる。
【0038】
【数3】
【0039】
しかし、消音評価位置10は、耳元であるため、誤差マイク40を設置することによる煩わしさが生じる。そこで、誤差マイク40は、図1を参照して上述したように、眼鏡3aの柄に装着している。つまり、誤差マイク40による誤差検出位置は、消音評価位置10とは異なる位置となる。そのため、消音評価位置10における仮想誤差evは、検出することができない。
【0040】
この誤差検出位置について、低減対象音xおよび制御音の関係について説明する。低減対象音xは、伝達関数Wrを介して誤差検出位置に伝達される。このときの伝達騒音はdrである。この関係は、式(4)にて表される。
【0041】
【数4】
【0042】
また、スピーカー30が、制御信号生成部51により生成された当該制御信号uに応じた制御音を出力する。このスピーカー30が発生した制御音は、伝達関数Gr2を介して誤差検出位置に伝達される。このときの伝達制御音はyrである。ここで、制御信号生成部51から誤差検出位置までの伝達関数は、Grとする。上記の関係は、式(5)にて表される。
【0043】
【数5】
【0044】
そして、誤差マイク40により検出される誤差検出位置における実誤差は、式(6)に示すように、erとなる。この実誤差erを用いて、消音評価位置10における仮想誤差evをゼロにするように、制御信号生成部51における制御信号用適応フィルタCを更新する。制御信号用適応フィルタCの更新方法の詳細について、以下に説明する。
【0045】
【数6】
【0046】
制御信号生成部51における制御信号用適応フィルタCの更新は、誤差検出位置における実誤差erを用いて、直接法の適応アルゴリズムを用いる。ここでは、直接法LMSアルゴリズムを用いる場合を例にあげる。なお、詳細な説明はしないが、直接法RLSアルゴリズム、直接法FDAアルゴリズムを適用できる。
【0047】
ここで、直接法ではない適応アルゴリズムであれば、伝達関数GvまたはGrを同定する必要があるが、本実施形態では直接法の適応アルゴリズムを用いるため、伝達関数GvまたはGrを同定する必要がない。具体的には、直接法の適応アルゴリズムを用いることで、伝達関数GvまたはGrに相当する適応フィルタを設置しておき、当該適応フィルタを適応アルゴリズムによって更新することで、当該適応フィルタを現在の伝達関数GvまたはGrに適応させることができる。
【0048】
参照信号r、制御信号u、実誤差er、制御信号用適応フィルタC、第一経路用適応フィルタKv、第二経路用適応フィルタDvを用いて、第一仮想誤差算出部60および第二仮想誤差算出部61のそれぞれにおいて、第一仮想誤差ehv1および第二仮想誤差ehv2のそれぞれを算出する。そして、算出した第一仮想誤差ehv1および第二仮想誤差ehv2に基づくLMSアルゴリズムにより、制御信号用適応フィルタC、第一経路用適応フィルタKv、第二経路用適応フィルタDvを更新する。ここで、第一仮想誤差ehv1および第二仮想誤差ehv2は、式(7)(8)により表される。
【0049】
【数7】
【0050】
【数8】
【0051】
式(7)における変換仮想誤差ehvは、変換仮想誤差算出部52において、実誤差erを予め設定された変換フィルタWによって信号処理することにより算出される。この関係は、式(9)にて表される。なお、以下において、式中の「*」は、畳み込み演算子である。
【0052】
【数9】
【0053】
式(7)における第一仮想信号yhv1は、第一仮想信号生成部53において、制御信号uを第一経路用適応フィルタKvによって信号処理することにより生成される。この関係は、式(10)にて表される。ここで、第一経路用適応フィルタKvは、伝達関数Gvに対応するフィルタである。
【0054】
【数10】
【0055】
式(7)(8)における第二仮想信号dhvは、第二仮想信号生成部54において、参照信号rを第二経路用適応フィルタDvによって信号処理することにより生成される。この関係は、式(11)にて表される。ここで、第二経路用適応フィルタDvは、伝達関数Wv/Wrefに対応するフィルタである。
【0056】
【数11】
【0057】
式(8)における第四仮想信号yhv2は、第四仮想信号生成部56において、第三仮想信号sを制御信号用適応フィルタCによって信号処理することにより生成される。この関係は、式(12)にて表される。
【0058】
【数12】
【0059】
式(12)における第三仮想信号sは、第三仮想信号生成部55において、参照信号rを第一経路用適応フィルタKvによって信号処理することにより生成される。この関係は、式(13)にて表される。
【0060】
【数13】
【0061】
従って、上記式(7)は、式(9)(10)(11)より、式(14)のように表され、式(8)は、式(11)(12)(13)より、式(15)のように表される。
【0062】
【数14】
【0063】
【数15】
【0064】
さらに、第一フィルタ更新部57により、LMSアルゴリズムを適用して、第一仮想誤差ehv1をゼロにするように第一経路用適応フィルタKvを更新する。具体的には、第一フィルタ更新部57は、制御信号uおよび第一仮想誤差ehv1に基づいてLMSアルゴリズムを適用することにより、第一経路用適応フィルタKvを更新する。
【0065】
この更新処理について詳細に説明する。まず、第一フィルタ更新部57において、評価関数J1を式(16)のように設定する。この評価関数J1が極小となるような第一経路用適応フィルタKvを求める。
【0066】
【数16】
【0067】
そこで、勾配ベクトル▽1(k)を式(17)のように設定する。勾配ベクトル▽1(k)は、評価関数J1(k)を第一経路用適応フィルタKv(k)で偏微分して得られる。そうすると、勾配ベクトル▽1(k)は、式(17)の第二行の右辺に示すように表される。さらに、式(14)より、勾配ベクトル▽1(k)は、式(17)の第三行の右辺に示すように表される。以下において、添え字(k)は、サンプリング数(時間ステップ)を表す。
【0068】
【数17】
【0069】
そして、更新後の第一経路用適応フィルタKv(k+1)は、式(18)の第一行に示すように、算出した勾配ベクトル▽1(k)にステップサイズパラメータμ1を乗じた項を、前回更新された第一経路用適応フィルタKv(k)から減算することにより導き出す。そして、式(17)を代入すると、第一経路用適応フィルタKvの更新式は、式(18)の第二行に示すように表される。
【0070】
【数18】
【0071】
また、第二フィルタ更新部58により、LMSアルゴリズムを適用して、第一仮想誤差ehv1をゼロにするように第二経路用適応フィルタDvを更新する。具体的には、第二フィルタ更新部58は、参照信号rおよび第一仮想誤差ehv1に基づいてLMSアルゴリズムを適用することにより、第二経路用適応フィルタDvを更新する。
【0072】
この更新処理について詳細に説明する。第二フィルタ更新部58においては、第一フィルタ更新部57と同様に、評価関数J1を上述した式(16)のように設定する。そして、この評価関数J1が極小となるような第二経路用適応フィルタDvを求める。そこで、勾配ベクトル▽2(k)を式(19)のように設定する。当該勾配ベクトル▽2(k)は、評価関数J1(k)を第二経路用適応フィルタDv(k)で偏微分して得られる。そうすると、勾配ベクトル▽2(k)は、式(19)の第二行の右辺に示すように表される。さらに、式(14)より、勾配ベクトル▽2(k)は、式(19)の第三行の右辺に示すように表される。
【0073】
【数19】
【0074】
そして、更新後の第二経路用適応フィルタDv(k+1)は、式(20)の第一行に示すように、算出した勾配ベクトル▽2(k)にステップサイズパラメータμ2を乗じた項を、前回更新された第二経路用適応フィルタDv(k)から減算することにより導き出す。そして、式(19)を代入すると、第二経路用適応フィルタDvの更新式は、式(20)の第二行に示すように表される。
【0075】
【数20】
【0076】
さらに、制御信号用フィルタ更新部59により、LMSアルゴリズムを適用して、第二仮想誤差ehv2をゼロにするように制御信号用適応フィルタCを更新する。具体的には、制御信号用フィルタ更新部59は、第三仮想信号sおよび第二仮想誤差ehv2に基づいてLMSアルゴリズムを適用することにより、制御信号用適応フィルタCを更新する。
【0077】
この更新処理について詳細に説明する。まず、制御信号用フィルタ更新部59において、評価関数J2を式(21)のように設定する。この評価関数J2が極小となるような制御信号用適応フィルタCを求める。
【0078】
【数21】
【0079】
そこで、勾配ベクトル▽3(k)を式(22)のように設定する。当該勾配ベクトル▽3(k)は、評価関数J2(k)を制御信号用適応フィルタC(k)で偏微分して得られる。そうすると、勾配ベクトル▽3(k)は、式(22)の第二行の右辺に示すように表される。さらに、式(15)より、勾配ベクトル▽3(k)は、式(22)の第三行の右辺に示すように表される。
【0080】
【数22】
【0081】
そして、更新後の制御信号用適応フィルタC(k+1)は、式(23)の第一行に示すように、算出した勾配ベクトル▽3(k)にステップサイズパラメータμ3を乗じた項を、前回更新された制御信号用適応フィルタC(k)から減算することにより導き出す。そして、式(22)を代入すると、制御信号用適応フィルタCの更新式は、式(23)の第二行に示すように表される。
【0082】
【数23】
【0083】
上述したように、第一フィルタ更新部57および第二フィルタ更新部58において、消音評価位置10における誤差に相当する第一仮想誤差ehv1をゼロにするように、第一経路用適応フィルタKvおよび第二経路用適応フィルタDvを更新している。さらに、制御信号用フィルタ更新部59において、消音評価位置10における誤差に相当する第二仮想誤差ehv2をゼロにするように、制御信号用適応フィルタCを更新している。
【0084】
ここで、第一仮想誤差ehv1および第二仮想誤差ehv2の和を考える。当該和の式を展開すると、式(24)に示すようになる。
【0085】
【数24】
【0086】
式(24)より、ehv1およびehv2がゼロに収束し、CおよびKvがある一定値に収束する場合には、右辺の第二項と第三項がキャンセルされ、(W*er)がゼロに収束する。つまり、変換フィルタWの設定を高精度に行うことで、(W*er)に対応する消音評価位置10における誤差evをゼロに収束させることができる。
【0087】
以上説明したように、本実施形態によれば、制御信号用適応フィルタCは、誤差検出位置における騒音をゼロにするように更新するのではなく、誤差検出位置とは異なる消音評価位置10における騒音をゼロにするように更新している。従って、消音評価位置10に誤差マイク40を設置しなくても、消音評価位置10における騒音をゼロにすることができる。そして、消音評価位置10は人間の耳元であるため、人間の耳元に何ら装着することなく、人間の耳元に発生する騒音を低減することができる。
【0088】
さらに、本実施形態によれば、制御信号用適応フィルタCの更新に、直接法の適応アルゴリズムを適用している。ここで、直接法ではない単純適応アルゴリズムによれば、制御信号生成部51と評価点との間の伝達関数Gを予め同定しておき、当該伝達関数Gの推定値を用いて適応フィルタを更新する。このように、直接法の適応アルゴリズムでなければ、伝達関数Gを予め同定しておく必要があり、伝達関数Gの推定値の精度によって、制御性能が変化する。
【0089】
これに対して、本実施形態によれば、直接法の適応アルゴリズムを用いて、具体的には第一仮想誤差ehv1および第二仮想誤差ehv2を用いて、制御信号用適応フィルタCを更新している。つまり、制御信号用適応フィルタCを更新するために、制御信号生成部51と消音評価位置10との間の伝達関数Gvを予め同定する必要がない。さらに、当該伝達関数Gvが変化したとしても、直接法の適応アルゴリズムを用いることにより、制御信号用適応フィルタCが現在の伝達関数Gvに応じた値に追従できる。
【0090】
例えば、制御音を発生するスピーカー30を固定した場所に設置したときに、消音評価位置10である人間の耳元が移動した場合には、制御信号生成部51と人間の耳元との間の伝達関数Gvが変化する。このように、スピーカー30を固定した場所に設置し、消音対象の人間が移動したとしても、制御信号用適応フィルタCが当該伝達関数Gvに応じた値に追従するため、確実に人間の耳元における騒音を低減することができる。従って、伝達関数の同定をすることなく、誤差マイク40を設置している位置とは異なる消音評価位置10における騒音を低減することができる。つまり、誤差マイク40を耳元から離れた位置に設置したとしても、確実に耳元の騒音を低減できる。
【0091】
また、誤差マイク40を眼鏡3aの柄に設置しているため、誤差マイク40と消音評価位置10である耳元との相対的な位置が固定されている。従って、誤差マイク40による誤差検出位置と消音評価位置10との間の伝達関数がほとんど変化しない。従って、誤差マイク40により検出された実誤差に基づいて、消音評価位置10における第一仮想誤差ehv1および第二仮想誤差ehv2を高精度に算出できる。その結果、消音評価位置10における騒音を確実に低減できる。
【0092】
特に、誤差マイク40を眼鏡3aの柄に設置しており、誤差マイク40と消音評価位置10である耳元との距離が近い。従って、誤差マイク40が設置される誤差検出位置と消音評価位置10との間の伝達関数の変化が極めて小さい。これにより、消音評価位置10である耳元の騒音を確実に低減できる。
【0093】
また、本実施形態においては、Wv/Wr=Gv2/Gr2であるとして、変換フィルタWを用いた処理を行っている。上述したように、誤差マイク40と消音評価位置10である耳元との相対的な位置が固定されている。そのため、ほぼWv/Wr=Gv2/Gr2の関係となるため、このような前提としても十分に効果を発揮できる。特に、誤差マイク40と消音評価位置10との距離が非常に短い。このことからも、より上記の関係となるため、十分に効果を発揮できる。
【0094】
<第二実施形態>
第二実施形態の能動型消音装置の構成について、図4を参照して説明する。図4において、添え字「r」は、誤差マイク40が設置されている誤差検出位置に関することを意味し、添え字「v」は、消音評価位置10に関することを意味する。第二実施形態の能動型消音装置は、第一実施形態の能動型消音装置に対して、コントローラ150における制御信号用適応フィルタCの更新処理が相違する。以下、コントローラ150における当該更新処理について説明する。なお、以下の説明において、第一実施形態と同一構成について同一符号を付して説明を省略する。ここで、第一実施形態のコントローラ50において、Wv/Wr=Gv2/Gr2として、変換フィルタWを用いた更新処理を行った。これに対して、第二実施形態のコントローラ150は、Wv/Wr=Gv2/Gr2ではないとして、第一変換フィルタW1および第二変換フィルタW2を用いた更新処理を行う。
【0095】
制御信号生成部51における制御信号用適応フィルタCの更新は、誤差検出位置における実誤差erを用いて、直接法の適応アルゴリズムを用いる。ここでは、直接法LMSアルゴリズムを用いる場合を例にあげる。なお、詳細な説明はしないが、直接法RLSアルゴリズム、直接法FDAアルゴリズムを適用できる。
【0096】
参照信号r、制御信号u、実誤差er、制御信号用適応フィルタC、第一経路用適応フィルタKr、第二経路用適応フィルタDrを用いて、第一仮想誤差算出部161および第二仮想誤差算出部162のそれぞれにおいて、第一仮想誤差ehrおよび第二仮想誤差ehvのそれぞれを算出する。そして、算出した第一仮想誤差ehrおよび第二仮想誤差ehvに基づくLMSアルゴリズムにより、制御信号用適応フィルタC、第一経路用適応フィルタKr、第二経路用適応フィルタDrを更新する。ここで、第一仮想誤差ehrおよび第二仮想誤差ehvは、式(25)(26)により表される。
【0097】
【数25】
【0098】
【数26】
【0099】
式(25)における第一仮想信号yhrは、第一仮想信号生成部152において、制御信号uを第一経路用適応フィルタKrによって信号処理することにより生成される。この関係は、式(27)にて表される。ここで、第一経路用適応フィルタKrは、伝達関数Grに対応するフィルタである。なお、以下において、式中の「*」は、畳み込み演算子である。
【0100】
【数27】
【0101】
式(25)における第二仮想信号dhvは、第二仮想信号生成部153において、参照信号rを第二経路用適応フィルタDrによって信号処理することにより生成される。この関係は、式(28)にて表される。ここで、第二経路用適応フィルタDrは、伝達関数Wrに対応するフィルタである。
【0102】
【数28】
【0103】
式(26)における第四仮想信号yhvは、第四仮想信号生成部156において、第三仮想信号sを制御信号用適応フィルタCによって信号処理することにより生成される。この関係は、式(29)にて表される。
【0104】
【数29】
【0105】
式(29)における第三仮想信号sは、以下のように生成される。まず、第一変換仮想信号算出部154において、参照信号rを第一変換フィルタW1によって信号処理して生成された第一変換仮想信号tを生成される。そして、第三仮想信号生成部155において、第一変換仮想信号tを第一経路用適応フィルタKrによって信号処理することにより生成される。この関係は、式(30)にて表される。
【0106】
【数30】
【0107】
式(26)における第二変換仮想信号dhvは、第二変換仮想信号算出部157において、第二仮想信号dhrを第二変換フィルタW2によって信号処理することにより生成される。この関係は、式(31)にて表される。
【0108】
【数31】
【0109】
従って、上記式(25)は、式(27)(28)より、式(32)のように表され、式(26)は、式(28)〜(31)より、式(33)のように表される。
【0110】
【数32】
【0111】
【数33】
【0112】
さらに、第一フィルタ更新部158により、LMSアルゴリズムを適用して、第一仮想誤差ehrをゼロにするように第一経路用適応フィルタKrを更新する。具体的には、第一フィルタ更新部158は、制御信号uおよび第一仮想誤差ehrに基づいてLMSアルゴリズムを適用することにより、第一経路用適応フィルタKrを更新する。この更新処理は、第一実施形態の第一フィルタ更新部57の更新処理とほぼ同様であるため、説明を省略する。
【0113】
また、第二フィルタ更新部159により、LMSアルゴリズムを適用して、第一仮想誤差ehrをゼロにするように第二経路用適応フィルタDrを更新する。具体的には、第二フィルタ更新部159は、参照信号rおよび第一仮想誤差ehrに基づいてLMSアルゴリズムを適用することにより、第二経路用適応フィルタDrを更新する。この更新処理は、第一実施形態の第二フィルタ更新部58の更新処理とほぼ同様であるため、説明を省略する。
【0114】
さらに、制御信号用フィルタ更新部160により、LMSアルゴリズムを適用して、第二仮想誤差ehvをゼロにするように制御信号用適応フィルタCを更新する。具体的には、制御信号用フィルタ更新部160は、第三仮想信号sおよび第二仮想誤差ehvに基づいてLMSアルゴリズムを適用することにより、制御信号用適応フィルタCを更新する。この更新処理は、第一実施形態の制御信号用フィルタ更新部59の更新処理とほぼ同様であるため、説明を省略する。
【0115】
本実施形態によれば、第一変換フィルタW1が、Gv2/Gr2に対応するフィルタであり、第二変換フィルタW2が、Wv/Wrに対応するフィルタである。このように、第一変換フィルタW1と第二変換フィルタW2をそれぞれ設定することにより、Wv/Wr=Gv2/Gr2でない場合であっても、確実に消音評価位置10における騒音を低減できる。
【0116】
ここで、第二変換フィルタW2のゲインおよび位相を変化させたシミュレーションを行った。その結果、第二変換フィルタW2のゲインの誤差が大きくなりすぎると、消音評価位置10における騒音は大きくなる傾向にあり、また第二変換フィルタW2の位相の誤差が大きくなりすぎた場合にも、消音評価位置10における騒音が大きくなる傾向にあった。つまり、第一変換フィルタW1および第二変換フィルタW2を調整することで、第二実施形態の処理であっても、消音評価位置10における騒音の低減効果が見られることが分かった。従って、本実施形態によれば、低減対象音xにおける誤差検出位置から消音評価位置10までの伝達関数と制御音における誤差検出位置から消音評価位置10までの伝達関数とが一致しない場合であっても、確実に消音評価位置における騒音を低減できる。
【符号の説明】
【0117】
1:外壁面、 2:リクライニングチェア、 3:居住者、 3a:眼鏡、 4:自動車
10:消音評価位置、 20:参照マイク、 30:スピーカー、 40:誤差マイク
50:コントローラ、 51:制御信号生成部、 52:変換仮想誤差算出部
53:第一仮想信号生成部、 54:第二仮想信号生成部、 55:第三仮想信号生成部
56:第四仮想信号生成部、 57:第一フィルタ更新部、 58:第二フィルタ更新部
59:制御信号用フィルタ更新部、 60:第一仮想誤差算出部
61:第二仮想誤差算出部
150:コントローラ、 152:第一仮想信号生成部、 153:第二仮想信号生成部
154:第一変換仮想信号算出部、 155:第三仮想信号生成部
156:第四仮想信号生成部、 157:第二変換仮想信号算出部
158:第一フィルタ更新部、 159:第二フィルタ更新部
160:制御信号用フィルタ更新部、 161:第一仮想誤差算出部
162:第二仮想誤差算出部
【特許請求の範囲】
【請求項1】
誤差検出位置とは異なる消音評価位置において、音源から発生された低減対象音を能動的に低減する能動型消音装置であって、
前記低減対象音を検出して参照信号を生成する参照信号生成部と、
前記参照信号を制御信号用適応フィルタによって信号処理することにより制御信号を生成する制御信号生成部と、
前記制御信号生成部により生成された前記制御信号に応じた制御音を発生する制御音発生装置と、
前記誤差検出位置に配置され、前記誤差検出位置において前記制御音発生装置により発生された前記制御音と前記音源により発生された前記低減対象音との干渉による実誤差を検出する誤差マイクと、
前記参照信号、前記実誤差および仮想適応フィルタに基づいて第一仮想誤差を算出する第一仮想誤差算出部と、
前記第一仮想誤差をゼロにするように、前記仮想適応フィルタを更新する仮想適応フィルタ更新部と、
前記参照信号、前記仮想適応フィルタおよび前記制御信号用適応フィルタに基づいて前記消音評価位置における誤差としての第二仮想誤差を算出する第二仮想誤差算出部と、
前記第二仮想誤差をゼロにするように、前記制御信号用適応フィルタを更新する制御信号用適応フィルタ更新部と、
を備える能動型消音装置。
【請求項2】
請求項1において、
前記能動型消音装置は、
前記制御信号を第一経路用適応フィルタによって信号処理することにより第一仮想信号を生成する第一仮想信号生成部と、
前記参照信号を第二経路用適応フィルタによって信号処理することにより第二仮想信号を生成する第二仮想信号生成部と、
前記参照信号を前記第一経路用適応フィルタによって信号処理することにより第三仮想信号を生成する第三仮想信号生成部と、
前記第三仮想信号を前記制御信号用適応フィルタによって信号処理することにより第四仮想信号を生成する第四仮想信号生成部と、
を備え、
前記第一仮想誤差算出部は、前記誤差マイクにより検出される実誤差、前記第一仮想信号および前記第二仮想信号に基づいて、前記第一仮想誤差を算出し、
前記第二仮想誤差算出部は、前記第二仮想信号および前記第四仮想信号に基づいて、前記第二仮想誤差を算出し、
前記仮想適応フィルタ更新部は、
前記制御信号および前記第一仮想誤差に基づいて、前記第一仮想誤差をゼロにするように前記第一経路用適応フィルタを更新する第一フィルタ更新部と、
前記参照信号および前記第一仮想誤差に基づいて、前記第一仮想誤差をゼロにするように前記第二経路用適応フィルタを更新する第二フィルタ更新部と、
を備え、
前記制御信号用フィルタ更新部は、前記第三仮想信号および前記第二仮想誤差に基づいて、前記第二仮想誤差をゼロにするように前記制御信号用フィルタを更新する能動型消音装置。
【請求項3】
請求項2において、
前記能動型消音装置は、前記実誤差を予め設定された変換フィルタによって信号処理することにより変換仮想誤差を算出する変換仮想誤差算出部をさらに備え、
前記第一仮想誤差算出部は、前記変換仮想誤差、前記第一仮想信号および前記第二仮想信号に基づいて前記第一仮想誤差を算出する能動型消音装置。
【請求項4】
請求項2において、
前記第三仮想信号生成部は、前記参照信号を前記第一経路用適応フィルタおよび予め設定された第一変換フィルタによって信号処理することにより前記第三仮想信号を生成し、
前記能動型消音装置は、前記第二仮想信号を予め設定された第二変換フィルタによって信号処理することにより第二変換仮想信号を生成する第二変換仮想信号生成部をさらに備え、
前記第二仮想誤差算出部は、前記第二変換仮想信号および前記第四仮想信号に基づいて、前記第二仮想誤差を算出する能動型消音装置。
【請求項5】
請求項1〜4の何れか一項において、
前記誤差マイクは、前記消音評価位置に対して固定した位置に設置し、前記制御音発生装置に対して相対的に移動可能な位置に設置する能動型消音装置。
【請求項6】
請求項5において、
前記消音評価位置は、人間の耳元であり、
前記誤差マイクは、当該人間の頭部または首部に身につける物に装着される能動型消音装置。
【請求項1】
誤差検出位置とは異なる消音評価位置において、音源から発生された低減対象音を能動的に低減する能動型消音装置であって、
前記低減対象音を検出して参照信号を生成する参照信号生成部と、
前記参照信号を制御信号用適応フィルタによって信号処理することにより制御信号を生成する制御信号生成部と、
前記制御信号生成部により生成された前記制御信号に応じた制御音を発生する制御音発生装置と、
前記誤差検出位置に配置され、前記誤差検出位置において前記制御音発生装置により発生された前記制御音と前記音源により発生された前記低減対象音との干渉による実誤差を検出する誤差マイクと、
前記参照信号、前記実誤差および仮想適応フィルタに基づいて第一仮想誤差を算出する第一仮想誤差算出部と、
前記第一仮想誤差をゼロにするように、前記仮想適応フィルタを更新する仮想適応フィルタ更新部と、
前記参照信号、前記仮想適応フィルタおよび前記制御信号用適応フィルタに基づいて前記消音評価位置における誤差としての第二仮想誤差を算出する第二仮想誤差算出部と、
前記第二仮想誤差をゼロにするように、前記制御信号用適応フィルタを更新する制御信号用適応フィルタ更新部と、
を備える能動型消音装置。
【請求項2】
請求項1において、
前記能動型消音装置は、
前記制御信号を第一経路用適応フィルタによって信号処理することにより第一仮想信号を生成する第一仮想信号生成部と、
前記参照信号を第二経路用適応フィルタによって信号処理することにより第二仮想信号を生成する第二仮想信号生成部と、
前記参照信号を前記第一経路用適応フィルタによって信号処理することにより第三仮想信号を生成する第三仮想信号生成部と、
前記第三仮想信号を前記制御信号用適応フィルタによって信号処理することにより第四仮想信号を生成する第四仮想信号生成部と、
を備え、
前記第一仮想誤差算出部は、前記誤差マイクにより検出される実誤差、前記第一仮想信号および前記第二仮想信号に基づいて、前記第一仮想誤差を算出し、
前記第二仮想誤差算出部は、前記第二仮想信号および前記第四仮想信号に基づいて、前記第二仮想誤差を算出し、
前記仮想適応フィルタ更新部は、
前記制御信号および前記第一仮想誤差に基づいて、前記第一仮想誤差をゼロにするように前記第一経路用適応フィルタを更新する第一フィルタ更新部と、
前記参照信号および前記第一仮想誤差に基づいて、前記第一仮想誤差をゼロにするように前記第二経路用適応フィルタを更新する第二フィルタ更新部と、
を備え、
前記制御信号用フィルタ更新部は、前記第三仮想信号および前記第二仮想誤差に基づいて、前記第二仮想誤差をゼロにするように前記制御信号用フィルタを更新する能動型消音装置。
【請求項3】
請求項2において、
前記能動型消音装置は、前記実誤差を予め設定された変換フィルタによって信号処理することにより変換仮想誤差を算出する変換仮想誤差算出部をさらに備え、
前記第一仮想誤差算出部は、前記変換仮想誤差、前記第一仮想信号および前記第二仮想信号に基づいて前記第一仮想誤差を算出する能動型消音装置。
【請求項4】
請求項2において、
前記第三仮想信号生成部は、前記参照信号を前記第一経路用適応フィルタおよび予め設定された第一変換フィルタによって信号処理することにより前記第三仮想信号を生成し、
前記能動型消音装置は、前記第二仮想信号を予め設定された第二変換フィルタによって信号処理することにより第二変換仮想信号を生成する第二変換仮想信号生成部をさらに備え、
前記第二仮想誤差算出部は、前記第二変換仮想信号および前記第四仮想信号に基づいて、前記第二仮想誤差を算出する能動型消音装置。
【請求項5】
請求項1〜4の何れか一項において、
前記誤差マイクは、前記消音評価位置に対して固定した位置に設置し、前記制御音発生装置に対して相対的に移動可能な位置に設置する能動型消音装置。
【請求項6】
請求項5において、
前記消音評価位置は、人間の耳元であり、
前記誤差マイクは、当該人間の頭部または首部に身につける物に装着される能動型消音装置。
【図1】

【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−247738(P2012−247738A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−121583(P2011−121583)
【出願日】平成23年5月31日(2011.5.31)
【出願人】(000219602)東海ゴム工業株式会社 (1,983)
【出願人】(504145342)国立大学法人九州大学 (960)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月31日(2011.5.31)
【出願人】(000219602)東海ゴム工業株式会社 (1,983)
【出願人】(504145342)国立大学法人九州大学 (960)
【Fターム(参考)】
[ Back to top ]