
能動消音制御装置及び方法
【課題】発散せず高速に誤差マイク音圧を抑制する。
【解決手段】低減対象音に基づいて参照信号を生成する手段103と、参照信号のレベル値とレベル値のレベル変化量を検出する手段105と、レベル変化量とある閾値範囲とを比較する手段105と、フィルタ係数が可変な適応フィルタ104と、レベル変化量が閾値範囲外である場合には、適応フィルタのフィルタ係数の更新を停止する手段108と、更新ごとにフィルタ係数を記憶する手段109と、記憶されているフィルタ係数を使用して、参照信号をフィルタリングして制御信号を生成する手段104と、制御信号に基づいて制御音を発生する制御音源102と、制御音と、低減対象音との合成音圧を検出する誤差マイク110と、合成音圧に対応する誤差信号と、制御信号を適応フィルタでフィルタリングした信号に基づいてフィルタ係数を設定する手段111と、を具備する。
【解決手段】低減対象音に基づいて参照信号を生成する手段103と、参照信号のレベル値とレベル値のレベル変化量を検出する手段105と、レベル変化量とある閾値範囲とを比較する手段105と、フィルタ係数が可変な適応フィルタ104と、レベル変化量が閾値範囲外である場合には、適応フィルタのフィルタ係数の更新を停止する手段108と、更新ごとにフィルタ係数を記憶する手段109と、記憶されているフィルタ係数を使用して、参照信号をフィルタリングして制御信号を生成する手段104と、制御信号に基づいて制御音を発生する制御音源102と、制御音と、低減対象音との合成音圧を検出する誤差マイク110と、合成音圧に対応する誤差信号と、制御信号を適応フィルタでフィルタリングした信号に基づいてフィルタ係数を設定する手段111と、を具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、音圧レベルが変動する非定常音、あるいは、音源が停止状態(無音)を有する断続音、あるいは、移動する音源を対象に、参照信号供給手段、誤差マイク、制御用スピーカを用いて騒音源を低減する能動消音であって、誤差マイク位置での音圧抑圧化を実現するための制御方式及び制御装置に関するものである。
【背景技術】
【0002】
能動制御において、一般的に使用されている演算アルゴリズムであるFiltered−X LMSアルゴリズムでは、音圧レベルの変動が大きい騒音や音響パスが変動する移動音源にはこの音響経路での誤差要因が制御効果劣化につながり、制御が不安定になる問題をかかえてしまう。また、LMSアルゴリズムは勾配法型のアルゴリズムであるため計算量が少なく安定性は高いものの、収束が遅いという致命的な問題もあり、これらの理由により上記変動、移動騒音には適用困難であった。
【0003】
そこで、考え出された対策が、直接法アルゴリズムであり、例えば、移動する定常音を対象にしたアルゴリズム(例えば、非特許文献1、2参照)では、制御フィルタCの係数を更新するための適応フィルタC以外に、1つの固定フィルタK、その適応フィルタK、及び、適応フィルタDを設置し、誤差マイク信号を基に仮想誤差信号をつくり上記適応フィルタ係数の更新を行う。ここで示した係数更新計算には、従来のFiltered−Xと同じ勾配法型のLMSアルゴリズムを用いていることから、収束速度はほぼ等しく改善できないが、制御不安定要因である誤差経路がないために、移動する音に対しても発散することなく、安定した制御が可能である。
【0004】
そして、この安定した制御状態でさらに高速収束を目指し開発されたものが、直接法FTF法である。
【非特許文献1】雉本、他3名「誤差経路の変化に高速に追従するアルゴリズムを用いた能動的音響制御」、日本機械学会第14回環境工学総合シンポジウム2004講演論文集p42−p45
【非特許文献2】佐々木、他3名「外部入射騒音に対する能動的音響制御」、日本機械学会第13回環境工学総合シンポジウム2003講演論文集p42−p45
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、直接法FTFでも変動が大きい非定常音に対してはレベル変動が大きいことから不安定になり、追従が困難である。
【0006】
この発明は、上述した事情を考慮してなされたものであり、発散することなく安定して、かつ、高速に誤差マイク音圧を抑制する制御を行う能動消音制御装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述の課題を解決するため、本発明の能動消音制御装置は、音源から発せられた低減対象音を低減する能動消音制御装置において、前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、前記レベル変化量とある閾値範囲とを比較する比較手段と、フィルタ係数が可変な適応フィルタと、前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数の更新を停止する停止手段と、前記更新ごとに前記フィルタ係数を記憶する記憶手段と、前記記憶されているフィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、前記制御信号に基づいて制御音を発生する制御音源と、前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備することを特徴とする。
【0008】
本発明の能動消音制御装置は、音源から発せられた低減対象音を低減する能動消音制御装置において、前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、前記レベル変化量とある閾値範囲とを比較する比較手段と、フィルタ係数が可変な適応フィルタと、前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数を初期化する初期化手段と、前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、前記制御信号に基づいて制御音を発生する制御音源と、前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備することを特徴とする。
【0009】
本発明の能動消音制御装置は、音源から発せられた低減対象音を低減する能動消音制御装置において、前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、前記低減対象音の低減を制御する制御音を発生する制御音源と、前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、前記参照信号と、前記合成音圧に対応する誤差信号とに基づいて、推定誤差を算出する算出手段と、フィルタ係数が可変な適応フィルタと、前記推定誤差に基づいて前記フィルタ係数を調整する調整手段と、前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備し、前記制御音源は前記制御信号に基づいて制御音を発生することを特徴とする。
【0010】
本発明の能動消音制御装置は、音源から発せられた低減対象音を低減する能動消音制御装置において、前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、前記レベル変化量とある閾値範囲とを比較する比較手段と、フィルタ係数が可変な第1の適応フィルタと、前記レベル変化量が前記閾値範囲外である場合には、前記第1の適応フィルタの前記フィルタ係数の更新を停止する第1の停止手段と、前記第1の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第1の制御信号を生成する第1の制御信号生成手段と、前記第1の制御信号に基づいて第1の制御音を発生する第1の制御音源と、前記第1の制御音と、前記低減対象音との第1の合成音圧を検出する第1の誤差マイクと、前記第1の合成音圧に対応する誤差信号と、前記第1の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第1の適応フィルタの前記フィルタ係数を設定する第1の設定手段と、フィルタ係数が可変な第2の適応フィルタと、前記レベル変化量が前記閾値範囲外である場合には、前記第2の適応フィルタの前記フィルタ係数の更新を停止する第2の停止手段と、前記第2の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第2の制御信号を生成する第2の制御信号生成手段と、前記第2の制御信号に基づいて第2の制御音を発生する第2の制御音源と、前記第2の制御音と、前記低減対象音との第2の合成音圧を検出する第2の誤差マイクと、前記第2の合成音圧に対応する誤差信号と、前記第2の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第2の適応フィルタの前記フィルタ係数を設定する第2の設定手段と、を具備することを特徴とする。
【0011】
本発明の能動消音制御方法は、音源から発せられた低減対象音を低減する能動消音制御方法において、前記低減対象音に基づいて参照信号を生成し、前記参照信号のレベル値と該レベル値のレベル変化量を検出し、前記レベル変化量とある閾値範囲とを比較し、フィルタ係数が可変な適応フィルタを用意し、前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数の更新を停止し、前記更新ごとに前記フィルタ係数を記憶する記憶手段を用意し、前記記憶されているフィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、前記制御信号に基づいて制御音を発生し、前記制御音と、前記低減対象音との合成音圧を検出し、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定することを特徴とする。
【0012】
本発明の能動消音制御方法は、音源から発せられた低減対象音を低減する能動消音制御方法において、前記低減対象音に基づいて参照信号を生成し、前記参照信号のレベル値と該レベル値のレベル変化量を検出し、前記レベル変化量とある閾値範囲とを比較し、フィルタ係数が可変な適応フィルタを用意し、前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数を初期化し、前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、前記制御信号に基づいて制御音を発生し、前記制御音と、前記低減対象音との合成音圧を検出し、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定することを特徴とする。
【0013】
本発明の能動消音制御方法は、音源から発せられた低減対象音を低減する能動消音制御方法において、前記低減対象音に基づいて参照信号を生成し、前記低減対象音の低減を制御する制御音を発生し、前記制御音と、前記低減対象音との合成音圧を検出し、前記参照信号と、前記合成音圧に対応する誤差信号とに基づいて、推定誤差を算出し、フィルタ係数が可変な適応フィルタを用意し、前記推定誤差に基づいて前記フィルタ係数を調整し、前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定し、前記制御音は前記制御信号に基づいて発生されることを特徴とする。
【0014】
本発明の能動消音制御方法は、音源から発せられた低減対象音を低減する能動消音制御方法において、前記低減対象音に基づいて参照信号を生成し、前記参照信号のレベル値と該レベル値のレベル変化量を検出し、前記レベル変化量とある閾値範囲とを比較し、フィルタ係数が可変な第1の適応フィルタを用意し、前記レベル変化量が前記閾値範囲外である場合には、前記第1の適応フィルタの前記フィルタ係数の更新を停止し、前記第1の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第1の制御信号を生成し、前記第1の制御信号に基づいて第1の制御音を発生し、前記第1の制御音と、前記低減対象音との第1の合成音圧を検出し、前記第1の合成音圧に対応する誤差信号と、前記第1の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第1の適応フィルタの前記フィルタ係数を設定し、フィルタ係数が可変な第2の適応フィルタを用意し、前記レベル変化量が前記閾値範囲外である場合には、前記第2の適応フィルタの前記フィルタ係数の更新を停止し、前記第2の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第2の制御信号を生成し、前記第2の制御信号に基づいて第2の制御音を発生し、前記第2の制御音と、前記低減対象音との第2の合成音圧を検出し、前記第2の合成音圧に対応する誤差信号と、前記第2の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第2の適応フィルタの前記フィルタ係数を設定することを特徴とする。
【発明の効果】
【0015】
本発明の能動消音制御装置及び方法によれば、発散することなく安定して、かつ、高速に誤差マイク音圧を抑制する制御を行うことができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しながら本発明の実施形態に係る能動消音制御装置及び方法について詳細に説明する。まず、本実施形態で使用されるLMSアルゴリズム(LMS法)、直接法アルゴリズムについて簡単に説明しておく。
能動制御において、一般的に使用されている演算アルゴリズムとしてFiltered−X LMSアルゴリズムがある。このアルゴリズムは制御音源から誤差マイクまでの空間伝達経路の特性G(誤差経路)を事前に同定し、この特性が既知かつ時不変である仮定に基づいて制御フィルタCを更新するものである。つまり、Gを固定フィルタ係数とするものである。
【0017】
制御音源から誤差マイクまでの空間伝達経路の特性Gを事前に同定しないという直接法アルゴリズムは、誤差経路Gがないかわりに、制御フィルタCの更新には、複数の制御フィルタ、適応フィルタを使うのが特徴である。
【0018】
(第1の実施形態)
本発明の第1の実施形態に係る能動消音制御装置について図1(A)を参照して説明する。
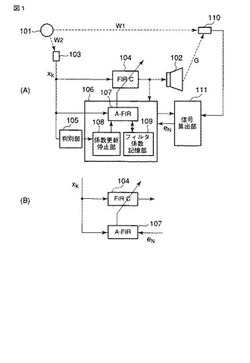
本実施形態の能動消音制御装置は、制御音源部102、参照信号生成部103、デジタルフィルタ演算部104、判別部105、フィルタ係数変更部106、誤差マイク110、信号算出部111を備えている。フィルタ係数変更部106は、適応フィルタ部107、係数更新停止部108、フィルタ係数記憶部109を備えている。本実施形態の能動消音制御装置は、音源から発せられた低減対象音101を低減するためのものである。
【0019】
参照信号生成部103は、低減対象音101を受音し、この低減対象音101に基づいて参照信号を生成し、この生成した参照信号をデジタルフィルタ演算部104、判別部105、フィルタ係数変更部106に供給する。
判別部105は、参照信号のレベル(絶対電圧)とこのレベルが時間経過にしたがってどの程度変化したかを示すレベル変化量(相対電圧)とを検出する。判別部105では、ある閾値範囲を設定しておき、レベル変化量とこの閾値範囲とを比較し、レベル変化量がこの閾値範囲外の値であるか否かを示した信号を係数更新停止部108に出力する。
【0020】
フィルタ係数変更部106は、参照信号に基づいてデジタルフィルタ演算部104の係数を変更する。
係数更新停止部108は、判別部105の判定結果を受けて、判定結果に応じて適応フィルタ部107の係数の更新を停止する。係数更新停止部108は、例えば、レベル変化量が予め設定されたある閾値範囲外であるという信号を判別部105から受け取った場合には、適応フィルタ部107の係数の更新を停止する。より具体的な動作の一例について後に数式(数1)を参照して説明する。
フィルタ係数記憶部109は、適応フィルタ部107の係数の更新ごとに、この係数を記憶する。したがって、係数更新停止部108が係数の更新を停止する直前の、適応フィルタ部107の係数も記憶している。
適応フィルタ部107は、信号算出部111からの出力信号に基づいて、フィルタ係数を更新する。そして、適応フィルタ部107は、この更新されたフィルタ係数をデジタルフィルタ演算部104に出力する。
【0021】
制御音源部102は、低減対象音101を低減するための制御音を発生する。
誤差マイク110は、制御音源部102からの制御音と低減対象音101との合成音圧を検出する。
デジタルフィルタ演算部104は、適応フィルタ部107で新たに求められた係数を受け取り、この係数に基づいて参照信号に対してフィルタリング処理を行い、制御音源部102が制御音を発生するために使用する制御信号を生成する。
【0022】
信号算出部111は、フィルタ係数変更部106からの信号と誤差マイク110からの誤差信号とを基に、フィルタ係数を変更するために必要な信号を出力するための信号を算出する。フィルタ係数変更部106からの信号は、例えば、制御信号を適応フィルタ部107でフィルタリングした信号である。
【0023】
ここで、係数更新停止部108の具体的な動作について説明する。
係数更新停止部108は、判別部105から係数更新の停止に対応する信号を受け取った場合には、適応フィルタ部107で新たに求められた係数のデジタルフィルタ演算部104への転送を停止する。
【0024】
具体的な一例について、図1(B)に示す一般的な適応フィルタ部のブロック図で説明する。係数更新停止部108は、係数更新を停止する場合には、適応フィルタ更新計算式である下記の(数1)に含まれる定数μを0にする。この場合、常に適応フィルタ部107では更新計算が実行されデジタルフィルタ演算部104への転送も実行されているが、転送の前後での差分がゼロであるため、結果的には係数更新が停止していることと等価となる。
【0025】
<C>N+1=<C>N−μ・eN・<x>k・・・(数1)
ここで、<A>はベクトルAを示すとする。フィルタCの添え字Nは更新回数を表し、現在をNとすると、左辺は更新後(未来)のCフィルタを示す。k番目のCフィルタ(スカラー値)の更新は
C(k)N+1=C(k)N−μ・eN(n)・x(n−k+1)、(k=1,2,…,M)、
(C1,C2,…, CM)TN+1=(C1,C2,…,CM)TN
−μ・eN・(x(n),x(n−1),…,x(n−M+1))T
なお、以後に記述のフィルタK、Lについても添え字表記は同様の意味を表す。
【0026】
係数変更停止状態では、外部入力x(n)の影響を受けないことから、安定した制御が可能になる。大きな変動が収まり閾値範囲内に戻ったときは、係数変更停止を開始する直前に前記記憶部に保存した適応フィルタ係数を読み出し、フィルタ更新を再開する、あるいは、定数μをもとの定数に戻し、フィルタ更新を再開する。
【0027】
以上に説明したように、誤差マイク110と低減対象音101との間の誤差経路(空間伝達関数)の同定を行わずに誤差マイク110での音圧の抑制を実現し、判別部105に設けられた閾値範囲外では、フィルタ係数変更部106の係数変更を停止することで、レベル変動が大きい非定常音の低減対象音101、あるいは、音源が停止状態(無音)を有する断続音、あるいは、移動する音源でも誤差マイク音圧の抑制を実現することができる。
【0028】
(第1の具体例)
第1の実施形態に係る能動消音制御装置の第1の具体例について図2を参照して説明する。以下、既に説明した装置部分と同様なものは同一の番号を付してその説明を省略する。
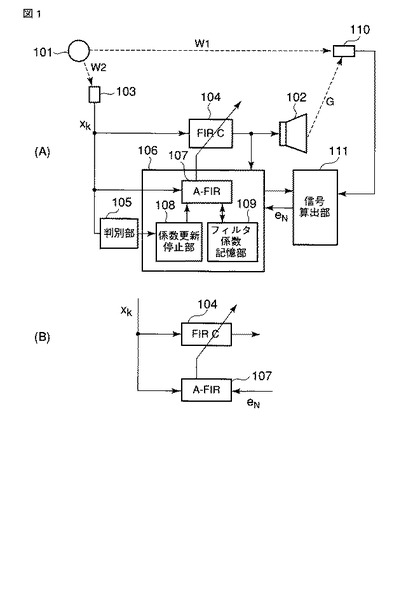
第1の具体例の能動消音制御装置では、フィルタ係数変更部106は、適応フィルタ部107として、適応フィルタ部201,202,203、固定フィルタ演算部204を備えている。適応フィルタ部201は制御フィルタK、LMS計算部を備え、適応フィルタ部202は制御フィルタD、LMS計算部を備え、適応フィルタ部203は制御フィルタC、LMS計算部を備えている。また、信号算出部111は、3つの適応フィルタ部201,202,203の出力と誤差マイク110の出力を基に、適応フィルタ部201,202,203の更新に必要な2つの仮想誤差信号(e1N、e2N)を算出する。適応フィルタ部201,202,203の係数更新計算にはLMS法を適用することで、誤差マイク音圧の抑制を実現する。
【0029】
騒音源の音圧レベルが大きく変動し、判別部105が、参照信号生成部103からの参照信号の振幅をxとすると下記の数式(数2)の判別式で示す閾値ξが0.01(ダイナミックレンジ10dBに相当)以下になったと判定したとする。この場合は、係数更新停止部108が適応係数更新を停止する。ただし、適応直後から一定時間経過までは適応動作を継続する必要があるため、ξの初期値は2程度の値を入力する。
【0030】
ξ=κ・ξ+(1−κ)・x2≦0.01 …(数2)
x:参照信号の振幅、κ:0.999
この式は、左辺のξ(新しい値)を右辺のξ(現在の値)から逐次更新して求めることを意味する。
【0031】
係数更新停止部108は、係数更新停止の場合には、デジタルフィルタ演算部104に対して適応フィルタ部203で新たに求めた係数CN+1の転送を行わない。係数更新停止部108は、最低限、適応フィルタ部203に含まれている制御フィルタCの更新を停止すればよいが、同時に適応フィルタ部201,202にそれぞれ含まれる制御フィルタK、Dの更新停止を行ってもよい。
【0032】
また、この代わりに、係数更新停止部108は制御フィルタCに関する適応フィルタ更新計算式の定数γcを0にしてもよい。係数更新停止部108は、最低限、制御フィルタCの適応計算定数をゼロにすればよいが、同時に残りの制御フィルタK、Dに関する定数γD、γKもゼロにしてもよい。
【0033】
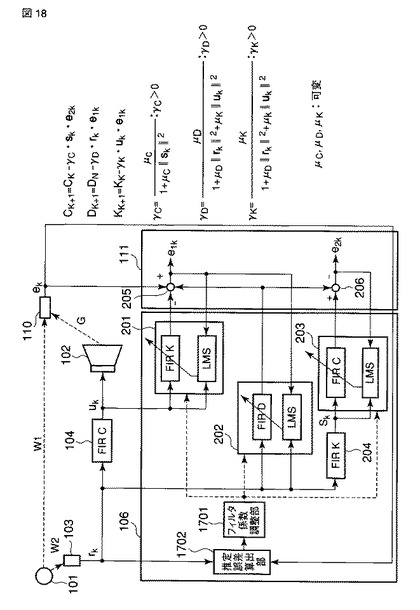
なお、γC、γD、γKはそれぞれ、定数μC、μD、μKを含む以下の式から算出する。
【0034】
<C>N+1=<C>N−γC・<s>N・e2N
<D>N+1=<D>N−γD・<r>N・e1N
<K>N+1=<K>N−γK・<u>N・e1N
γC=μC/(1+μC‖<s>N‖2);γC>0
γD=μD/(1+μD‖<r>N‖2+μK‖<u>N‖2);γD>0
γK=μK/(1+μD‖<r>N‖2+μK‖<u>N‖2);γK>0
次に、適応制御計算式の詳細を以下の数式(数3)に示す。<C>Nは更新回数N回目(現在)のM個の列ベクトルであり、<s>Nは同様にM個の列ベクトルであり、
<C>N=(C(1),C(2),…,C(M))TN,(k=1,2,…,M)…(数3)
<s>N=(s(1),s(2),…,s(M))TN,(k=1,2,…,M)…(数3)
e2Nは更新回数N回目(現在)の2つ目の仮想誤差信号のスカラー値(AD変換で取り込んだ1個のデータ)であり、したがって、
<C>N+1=<C>N−γC・<s>N・e2N…(数3)
のフィルタ更新式の意味は、k番目の係数(スカラー値)をC(k)とすると、以下のように書き直すことができる。
【0035】
C(k)N+1=C(k)N−γC・s(n−k+1)・e2N(n),(k=1,2,…,M−1)…(数3)
例えば、更新後の1番目の係数は現在の1番目のフィルタCから、現在取り込んだSとe2のスカラー値のかけ算に係数γCを掛けたものを引いた値となる。
【0036】
C(1)N+1=C(1)N−γC・s(n)N・e2N(n)…(数3)
この要領で、係数更新停止部108は、k=2からM−1までの全てのフィルタ係数を更新する。
【0037】
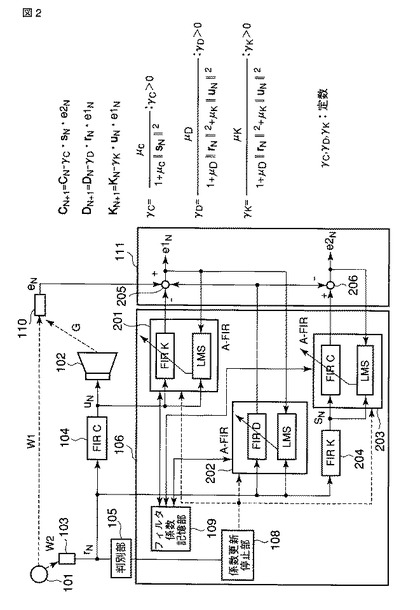
次に、実際に非定常音の代表例である図3(A)に示すいびき音に対して、従来法と本提案手法を適用し、同アルゴリズムの有意性を検証した例について図3(B)を参照して説明する。
【0038】
まずはじめは従来のFiltered−Xについて実施する。図1に示すブロック図の中で騒音源から誤差マイクまでの空間伝達関数W、騒音源から参照検出部までの空間伝達関数W、スピーカから誤差マイクまでの空間伝達関数Cはすべて実環境下で計測した値を用いる。騒音源には予め録音したいびき音を用いて、従来法によるシミュレーションで検証した結果を図3(B)に示す。図3(B)に示した振幅のうち、黒の線で示したものが制御前の振幅に相当し、グレーの線で示したものが制御後の振幅に対応する。図3(B)に示すように、従来法では、第1パターン音(1回目のいびき)では制御遅延により収束できず、第1パターンより変化量の大きい第2パターン音(2回目のいびき)で制御は発散してしまう。
【0039】
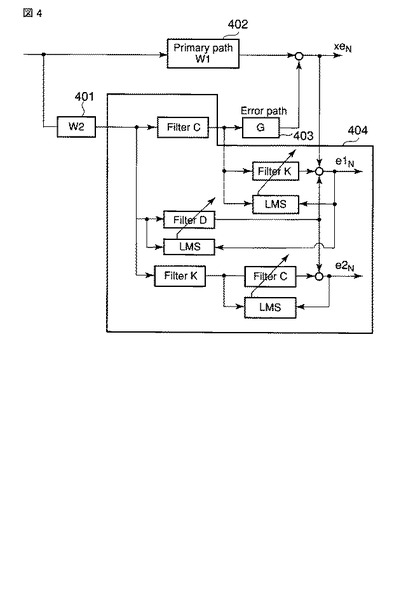
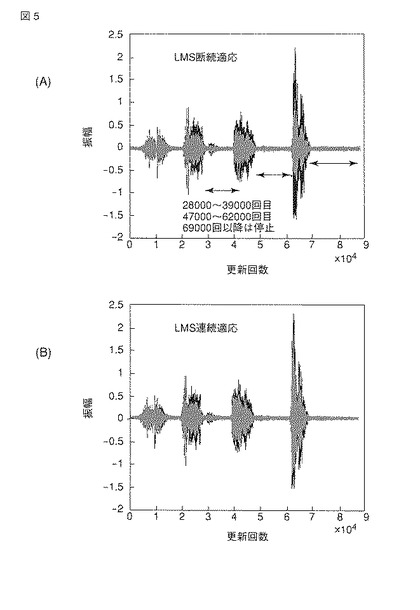
次に、図2に示した能動消音制御装置により直接法LMSを用いて、無音時に外部雑音としてホワイトノイズを加えた状態で、先に示した判別部の閾値を用いて、適応係数更新停止対策案の有効性を評価した場合について図5(A)、図5(B)を参照してシミュレーション結果を説明する。図2の能動消音制御装置に対応する図4に示す制御ブロック図において実環境下で計測した値を用いてシミュレーションを実施した。図4は、一例として、移動する定常音を対象にしたアルゴリズムを示す。
【0040】
図4の制御ブロックでは、制御フィルタCの係数を更新するための適応フィルタC以外に、1つの固定フィルタK、その適応フィルタK、及び、適応フィルタDを設置し、誤差マイク信号を基に仮想誤差信号をつくり、上記適応フィルタ係数の更新を行うのが特徴である。誤差マイク信号を基に仮想誤差信号をつくり、上記適応フィルタ係数の更新を行う。ここで示した係数更新計算には、従来のFiltered−Xと同じ勾配法型のLMSアルゴリズムを用いていることから、収束速度はほぼ等しく改善できないが、制御不安定要因である誤差経路がないために、移動する音に対しても発散することなく、安定した制御が可能である。そして、この安定した制御状態でさらに高速収束を目指し開発されたものが、直接法FTFである。
【0041】
図5は、いびき音の無音時にホワイトノイズを入れたものに対して直接法LMSを適用し、騒音の小さい部分で適応を一時的に停止した場合(図5(A))と、適応動作を連続で行った場合(図5(B))とを示した図である。図5(A)及び図5(B)に示した振幅のうち、黒の線で示したものが制御前の振幅に相当し、グレーの線で示したものが制御後の振幅に対応する。図5(A)で適応動作を停止したのは、横軸が28000から39000まで、47000から62000まで、さらに69000以降であり、図5(A)では横矢印でその範囲を示している。図5(A)と図5(B)とを比較すると、一時的に停止した場合を示した図5(A)の手法の方の制御効果が優れていた。特に4回目のいびき音では両者の差が顕著となった。すなわち、図5(B)と比較して図5(A)に示した方が制御前の振幅と制御後の振幅の差が著しい。
【0042】
(第2の具体例)
第1の実施形態に係る能動消音制御装置の第2の具体例について図6を参照して説明する。
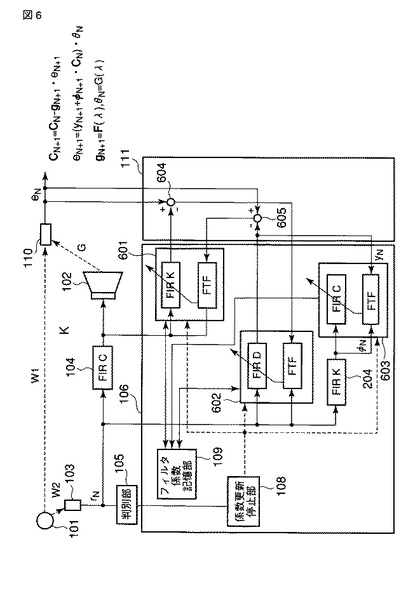
この具体例は、図2に示した第1の具体例とは、適応フィルタ部と、信号算出部111が異なる。すなわち、適応フィルタ部201,202,203の代わりに適応フィルタ部601,602,603を設置し、適応フィルタ部601は制御フィルタK、FTF計算部を備え、適応フィルタ部602は制御フィルタD、FTF計算部を備え、適応フィルタ部603は制御フィルタC、FTF計算部を備えている。また、信号算出部111は、2つの適用フィルタ部601,602の出力と誤差マイク110の出力を基にして、適応フィルタ部601,602,603の更新に必要な信号を算出する。この具体例では、適応フィルタの係数更新計算にはFTF法を適用することで、誤差マイク110の音圧の抑制を実現する。
【0043】
FTF法とは高速トランスバーサルフィルタを使用する手法のことで、最小二乗法に属する適応アルゴリズムであり、勾配法型の上記のLMS法と比べて、計算量は大きくなるものの、収束速度はさらに早くなる特徴を有する。したがって、閾値設定した範囲外の参照信号が入力されたことで効果が劣化した際には、一度係数を初期化するほうが、効果的となる。
アルゴリズムについては「適応信号処理アルゴリズム」(飯國洋二著、東京、培風館, 2000.7 中央学, 547.1/I 11325274)に書かれており、一般的であるので詳細は省略するが、図6で示すFTF計算部への2つの入力信号を使用して誤差信号を算出し、フィルタを更新していく手法はLMS法と同様である。
ただし、FTF法のLMS法との一番の違いは、FTF法では係数更新計算が複雑で、その中に、直接法LMSでは用いられないλという定数を使って、係数の収束をコントロールする操作を行っていることである。数式で概略を説明すると数式(数4)のとおりである。
【0044】
<C>N+1=<C>N−<g>N+1・eN+1
eN+1=(yN+1+<φ>N+1*<C>N)・θN …(数4)
<g>N+1=<F(λ)>,θN=G(λ)、ここで、<A>*<B>はベクトルAとベクトルBの内積を示す。
【0045】
図6の中のフィルタCの更新ブロック図に着目すると、更新計算は以下のようになる。<g>N、eN(スカラー)はそれぞれLMS法での<s>N、e2Nに相当するが、LMS法では直接これらの値でフィルタCの更新を行っているが、FTF法ではeは、ブロック図での適応フィルタ部603への右からの入力信号yN(FTF法では目標値と呼ぶ)と左からの入力信号φNの値とから算出する。また、<g>Nは、さらに複雑な仮想誤差算出式を用いて算出される。この値を算出する過程でλという定数が用いられる。
【0046】
これまで定常音で行われたFTF法ではこのλを一定の値(固定値)として入力していたが、非定常音の制御向けにこのλを可変にさせる場合については後に図19を参照して説明する。
【0047】
(第2の実施形態)
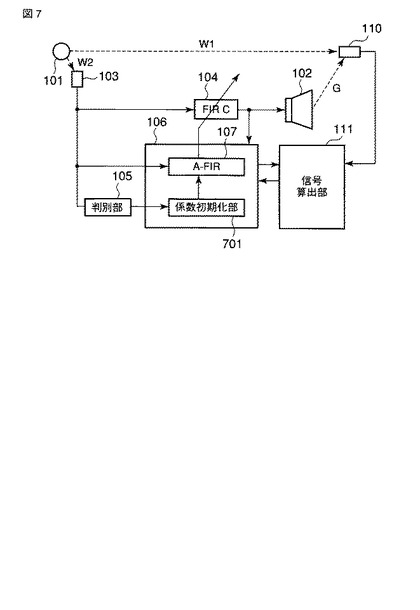
本発明の第2の実施形態に係る能動消音制御装置について図7を参照して説明する。
本実施形態の能動消音制御装置は、第1の実施形態の能動消音制御装置とは、フィルタ係数変更部106の内部構成が異なるのみである。本実施形態のフィルタ係数変更部106は、適応フィルタ部107と、係数初期化部701を備えている。
【0048】
係数初期化部701は、判別部105が、参照信号生成部103が出力する参照信号のレベル変化量が閾値範囲外の場合、デジタルフィルタ演算部104の係数を初期化する。つまり、図1(B)に示す一般的な適応フィルタのブロック図で説明すると、一度、制御フィルタの係数Cをすべてゼロに初期化することである。例えば、上記(数1)参照。
【0049】
以上に説明したように、誤差マイク110と低減対象音101との間の誤差経路(空間伝達関数)の同定を行わずに誤差マイク110での音圧の抑制を実現し、判別部105に設けられた閾値範囲外では、フィルタ係数変更部106のフィルタ係数を初期化することで、レベル変動が大きい非定常音の低減対象音101、あるいは,音源が停止状態(無音)を有する断続音、あるいは、移動する音源でも誤差マイク音圧の抑制を実現することを特徴とする。
【0050】
(第1の具体例)
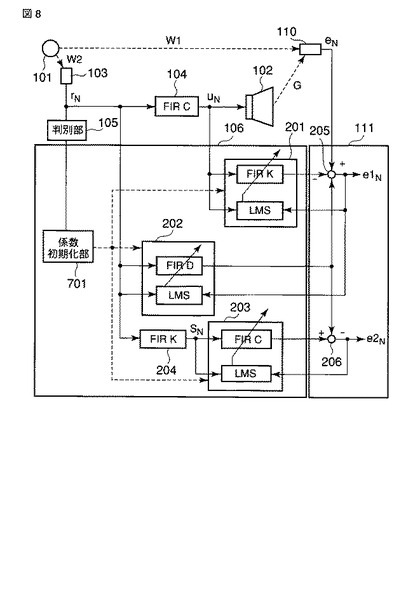
第2の実施形態に係る能動消音制御装置の第1の具体例について図8を参照して説明する。
本具体例は、図2に示した、第1の実施形態の第1の具体例から係数更新停止部108を除いて代わりに係数初期化部701を設け、さらにフィルタ係数記憶部109を除いたものである。
【0051】
係数初期化部701は、騒音源の音圧レベルが大きく変動し判別部105の閾値範囲を超えた場合に、係数を初期化する。初期化とは、例えば、すべての制御フィルタ係数をゼロにすることである。初期化する対象となるのは、最低限、制御フィルタCであるが、同時に残りの制御フィルタK、Dも初期化してもよい。
【0052】
本具体例の適応フィルタ部201,202,203は、係数更新計算をする際、従来のFiltered−Xでなく、LMS法を適用することで、すべての制御フィルタ係数をゼロにして、一から制御更新しなおしても、誤差マイク110の低減効果が劣化せずに、誤差マイク110の音圧の抑制を実現し、これを維持することができる。
【0053】
(第2の具体例)
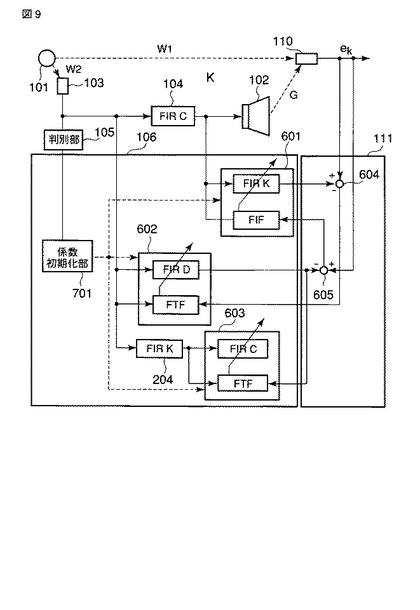
第2の実施形態に係る能動消音制御装置の第2の具体例について図9を参照して説明する。
この具体例は、図8に示した第1の具体例とは適応フィルタ部と、信号算出部111が異なる。すなわち、適応フィルタ部201,202,203の代わりに適応フィルタ部601,602,603を設置し、適応フィルタ部601は制御フィルタK、FTF計算部を備え、適応フィルタ部602は制御フィルタD、FTF計算部を備え、適応フィルタ部603は制御フィルタC、FTF計算部を備えている。また、信号算出部111は、2つの適用フィルタ部601,602の出力と誤差マイク110の出力を基にして、適応フィルタ部601,602,603の更新に必要な信号を算出する。本具体例の能動消音制御装置は、FTF法により、すべての制御フィルタ係数を一度ゼロにしても、さらに早くもとの状態に戻すことができる。
【0054】
本具体例では、FTF法の導入を可能とし、誤差マイク110の低減効果が劣化しても制御が発散することなく、誤差マイク110の音圧の抑制を実現、維持することができる。この手法は直接法LMSよりも収束が早いことから、閾値設定した範囲外の誤差信号が入力されたことで効果が劣化した際には、一度係数を初期化する本手法が最も効果的となる。
【0055】
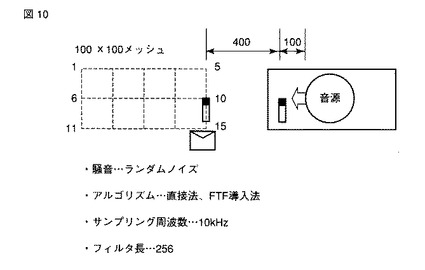
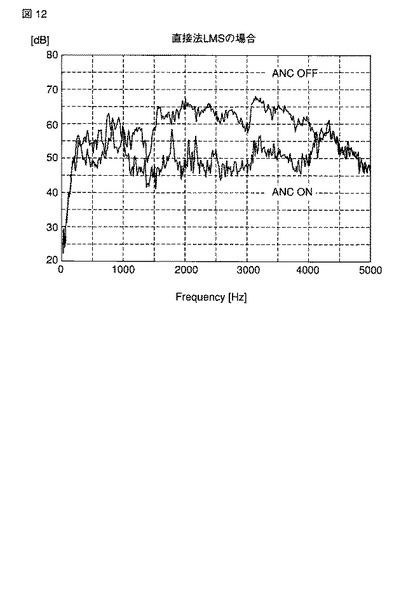
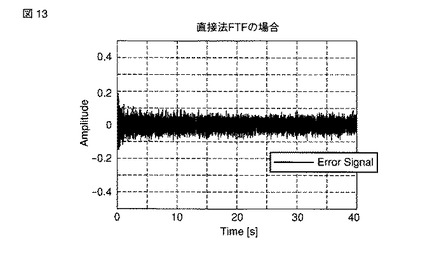
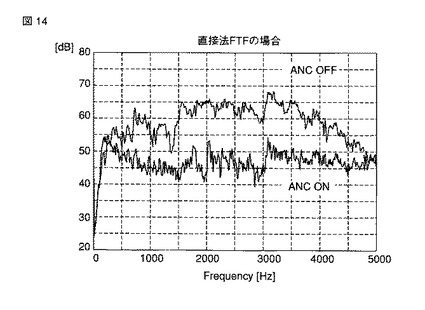
次に、実験例について図10、図11、図12、図13、図14を参照して説明する。図10に示す実験システム構成にて以下の条件下で、5kHzまでのランダム音に対して、直接法FTFの有効性を直接法LMSと比較評価した。
サンプリング周波数・・・10kHz
カットオフ周波数(LPF)・・・4kHz
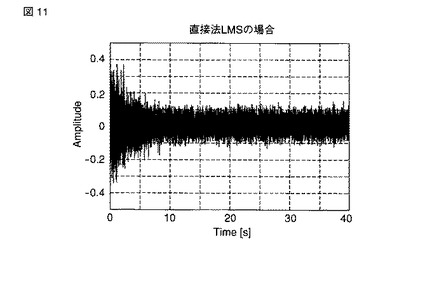
直接法LMSの場合については図11及び図12を参照して説明し、一方、直接法FTFの場合については図13及び図14を参照して説明する。図11及び図13は、横軸の変数を時間として、誤差マイク110の時系列波形を示している。図12及び図14は、横軸の変数を周波数として、誤差マイク110の制御効果を示している。すなわち、能動消音制御装置をオンした場合(ANC on)とオフした場合(ANC off)とを比較して低減対象音を低減する効果を示す。LMS法とFTF法とを比較すると、FTF法の方が1秒以内に収束し、さらに広帯域で低下量が大きくなっているのがわかる。
【0056】
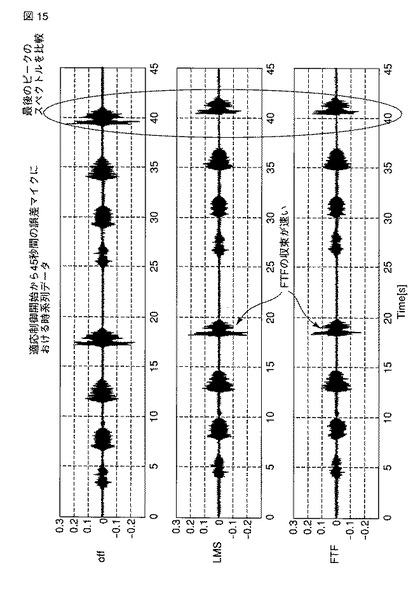
次に、非定常のいびき音について図15を参照して説明する。図15は、能動消音制御装置をオフした場合と、LMS法を使用した場合と、FTF法を使用した場合とを比較した結果を示している。図15は、適応制御開始から45秒間の誤差マイク110における時系列データを示す。
サンプリング周波数・・・10kHz
カットオフ周波数(LPF)・・・3.5kHz
図15によれば、直接法FTFのほうが早く収束しているのがわかる。
【0057】
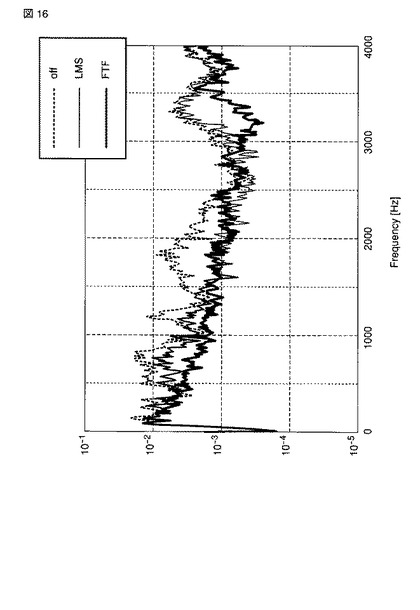
次に、誤差マイク110の制御効果について図16を参照して説明する。図16は、横軸の変数を周波数とした誤差マイクの制御効果を示す。図16によれば、周波数のほぼ全域にわたってFTF法が効果的であり、特に高周波数域(3−4kHz)でLMS法とFTF法の差が顕著になることがわかる。
【0058】
(第3の実施形態)
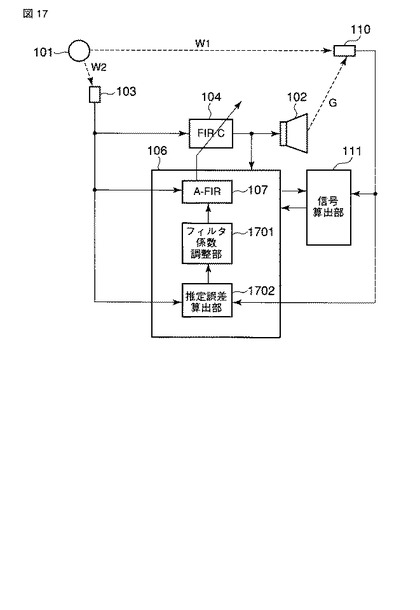
本発明の第3の実施形態に係る能動消音制御装置について図17を参照して説明する。
本実施形態の能動消音制御装置は、第1の実施形態の能動消音制御装置とは、フィルタ係数変更部106の内部構成が異なるのみである。本実施形態のフィルタ係数変更部106は、フィルタ係数調整部1701と、推定誤差算出部1702を備えている。
【0059】
推定誤差算出部1702は、参照信号生成部103からの参照信号と誤差マイク110からの誤差信号とから得られる推定誤差EEを算出する。推定誤差EEは、次の数式(数5)で表現される。
【0060】
EE=10log10(Σe2/Σd2) …(数5)
e:誤差マイク信号
d:参照マイク信号
フィルタ係数調整部1701は、推定誤差EEを基にして、予め備えている、適応フィルタ部107の係数を調整する。この結果、時々刻々変化する誤差マイク信号のレベル変化に応じて、係数を可変にしながら制御することができる。
【0061】
本実施形態によれば、変動の大きな騒音や移動音に対しても、発散することなく、安定した制御を実現することができる。上述した、参照信号のレベルを判別する手法(第1の実施形態、第2の実施形態)では閾値の設定を正確に行う必要があるが、本実施形態では判別部105が不要であることからこのような設定は不要であり、この点でより安定した制御を実現することができる。
【0062】
(第1の具体例)
第3の実施形態に係る能動消音制御装置の第1の具体例について図18を参照して説明する。
本具体例は、図2に示した、第1の実施形態の第1の具体例から係数更新停止部108を除いて代わりに推定誤差算出部1702及びフィルタ係数調整部1701を設け、さらにフィルタ係数記憶部109を除いたものである。
【0063】
推定誤差算出部1702が参照信号と誤差マイク信号から得られる推定誤差EEを算出し、フィルタ係数調整部1701が推定誤差EEを基に、従来の直接法LMSでは定数であったμC、μD、μKを推定誤差EEの値を使って可変に調整する。これにより、変動の大きな騒音や移動音に対しても、発散することなく、安定した制御を実現する。
【0064】
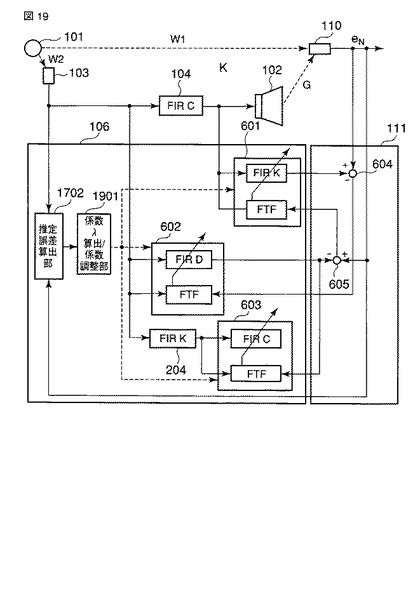
(第2の具体例)
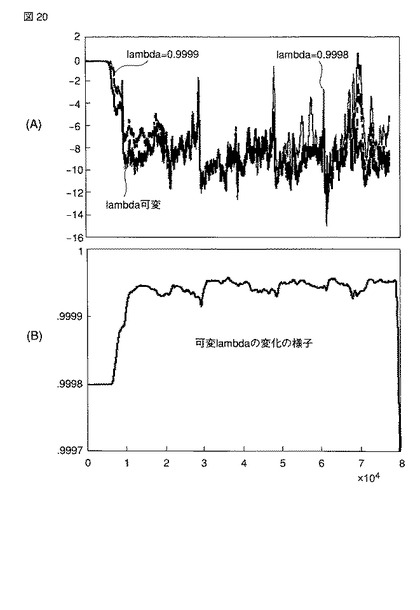
第3の実施形態に係る能動消音制御装置の第2の具体例について図19を参照して説明する。第1の具体例とは異なり係数更新にFTF法を適用した例である。
この具体例は、図18に示した第1の具体例とは適応フィルタ部と、信号算出部111と、フィルタ係数調整部1701が異なる。この具体例の能動消音制御装置は、フィルタ係数調整部1701を取除き代わりに係数λ算出/係数調整部1901を備えている。
【0065】
フィルタ係数調整部1701が参照信号と誤差マイク信号とから得られる推定誤差EEを算出して、係数λ算出/係数調整部1901が推定誤差EEを基に、従来の直接法FTFでは忘却係数として定数(λ=0.999など)であったλを可変に調整する。
【0066】
例えば、推定誤差EEとλの関係は以下のとおりである。
【0067】
EEE=κ・EEE+(1−κ)・EE,κ=0.999
この式は、左辺のEEE(新しい値)を右辺のEEE(現在の値)とEE(現在の値)から逐次更新して求めることを意味する。
【0068】
λ=1−10(−3.7+EEE/15)
このλの数式は一例である。
【0069】
次に、この数式でFTF法の係数λを更新した場合の制御効果について図20(A)、図20(B)を参照して説明する。図20(A)及び図20(B)は、横軸の変数として制御サンプリング回数(経過時間を示す)を表し、図20(A)の縦軸の変数は制御前後の誤差マイクの低減量(dB)を表し、図20(B)の縦軸の変数はλ値を表す。図20(A)及び図20(B)によれば、λを固定した場合と比べて、可変にした場合のほうが、発散せずに十分低下しているのがわかる。
【0070】
(第4の実施形態)
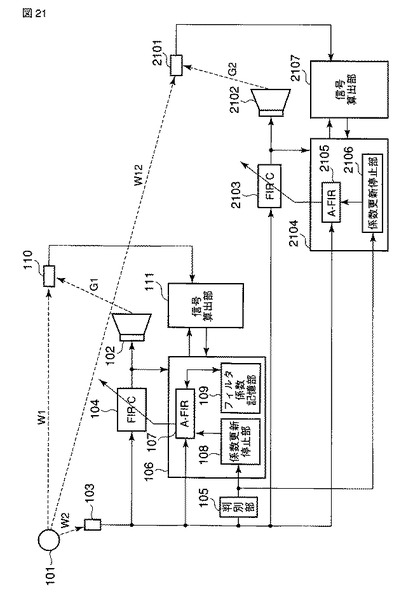
本発明の第4の実施形態に係る能動消音制御装置について図21を参照して説明する。
本実施形態の能動消音制御装置は、2本の誤差マイク110、2101を用いて、同時に2つのマイク音圧を抑制するためのものである。
【0071】
本実施形態は、図1に示した能動消音制御装置に加えて、誤差マイク2101、制御音源部2102、デジタルフィルタ演算部2103、フィルタ係数変更部2104、信号算出部2107を備えている。さらに、フィルタ係数変更部2104は、適応フィルタ部2105、係数更新停止部2106を備えている。これらの図21の新しい装置部分は、図1の同一名称の装置部分と同様な機能を有する。
【0072】
本実施形態では、誤差マイク110、2101と制御音源部102、2102間の誤差経路(空間伝達関数)の同定を行わずに2つ誤差マイク110,2101それぞれでの音圧を同時に抑制し、判別部105に設けられた閾値範囲外では、フィルタ係数変更部106、2104の係数変更を停止することで、レベル変動が大きい非定常音の低減対象音101、あるいは、音源が停止状態(無音)を有する断続音、あるいは、移動する音源でも2つの誤差マイクの音圧を同時に抑制することができる。
【0073】
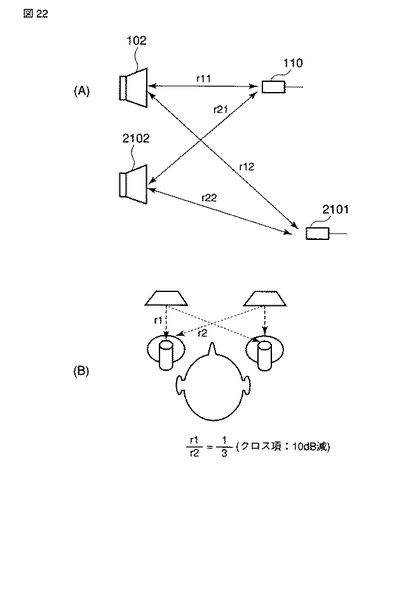
耳元に誤差マイクを近づけ、両耳元での消音を実現することを想定した場合で、かつ、通常は誤差マイクとスピーカ間の距離が離れている場合は、クロストークの影響も受けて、その音響伝達関数分も計算に考慮した制御アルゴリズムでなければ、2つの誤差マイクを同時に低減することは困難であった。しかし、本実施形態によれば、参照マイクのみを共有化するだけでも同時に誤差マイクを低減することができる。
【0074】
特に、図22(A)、図22(B)に示すように、制御音源部102から誤差マイク110までの距離r11に対して、隣の制御音源部2102から誤差マイク110までの距離r21が概ね3倍以上、制御音源部2102から誤差マイク2101までの距離r22に対して、隣の制御音源部102から誤差マイク2101までの距離r12が概ね3倍以上を満たす位置に配すると、音圧は距離に半比例して減衰するため、距離比が3倍になり約10dB=10log1032クロストーク音が低減する。したがって、クロス項を考慮していないアルゴリズムが適用可能となる。
【0075】
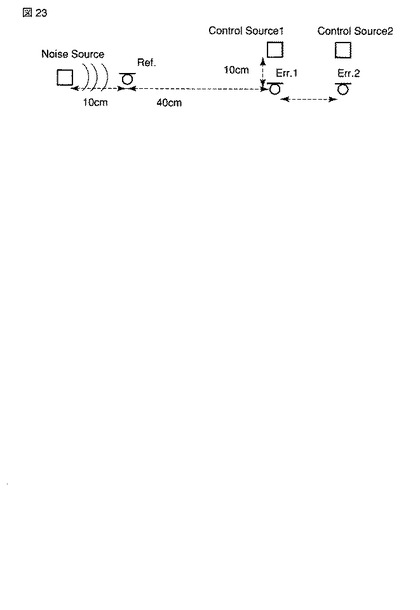
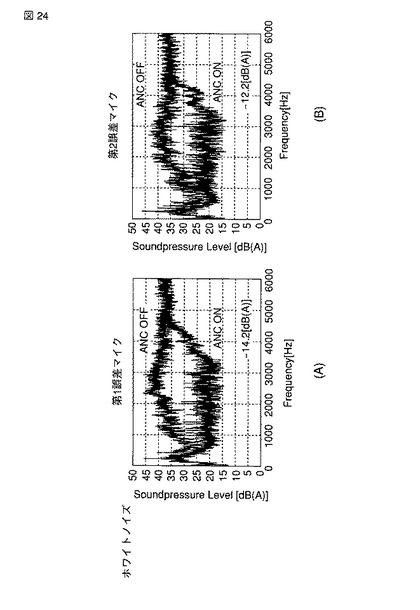
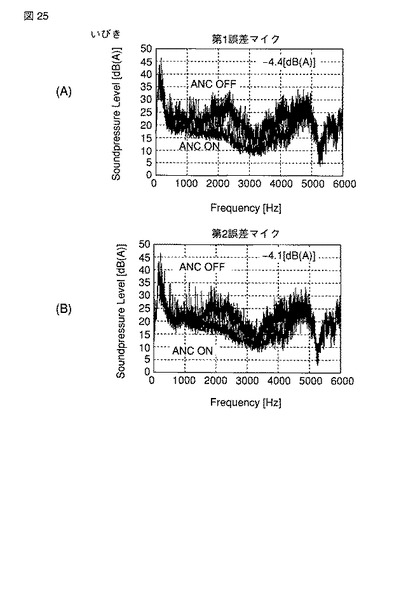
次に、図23に示す実験システム構成にて、ランダム音(ホワイトノイズ)を鳴らした場合の結果について図24(A)、図24(B)を参照して説明する。また、いびき音の場合の結果について図25(A)、図25(B)を参照して説明する。
【0076】
図24の場合も図25の場合もともに、本実施形態の能動消音制御装置をオンにする(ANC ON)と、高周波数まで十分に低下しているのがわかる。図中の数字は200Hzから4kHzまでの低下量(積分値)であるが、いびき音の場合、ランダム音に比べて約10dB劣化しているが、これは200Hz付近でまったく音が低下しているためである。ランダム音の場合は、上記積分値に対するこの帯域の寄与が低いのに対して、いびき音は寄与が高いために差が出る。
【0077】
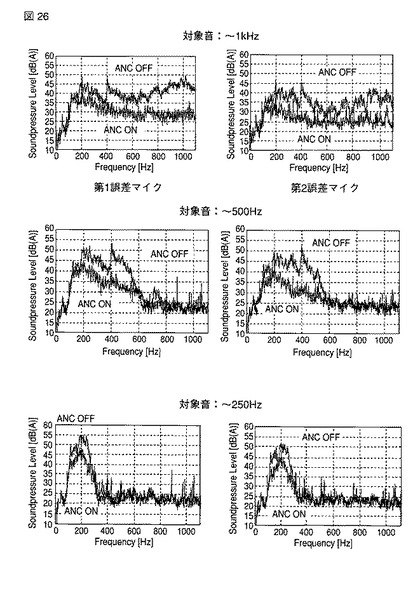
次に、帯域を絞って、図25と同じ条件でいびき音を制御した結果について図26を参照して説明する。何れの周波数帯域でも十分に2つの誤差マイクにより対象音を低減することができ、本実施形態の準2chアルゴリズムが有効であることがわかる。
【0078】
以上に示した実施形態によれば、参照信号のレベル(絶対電圧)とレベル変化量(相対電圧)から、対象騒音の変動状態を判定し、ある時間帯は制御フィルタC係数を固定にしたまま、変化させずに実行したり、制御効果が劣化しだしたら制御フィルタCを一度、初期化して制御前の状態に戻してから制御を行うことで騒音レベルの変動や騒音源位置の移動に追従することが可能となる。
【0079】
さらに、本実施形態によれば、誤差信号と参照信号を使い制御効果に関連する推定誤差値を算出し、これを基に常にフィルタ係数を微調整することで、さらに制御を安定させ、高速収束を可能にし、変動の激しい非定常音の制御、高速移動音源にも適応可能とすることができる。
【0080】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【図面の簡単な説明】
【0081】
【図1】(A)は本発明の第1の実施形態に係る能動消音制御装置のブロック図、(B)は一般的な適応フィルタ部のブロック図。
【図2】図1(A)の能動消音制御装置の第1の具体例のブロック図。
【図3】(A)は非定常音の代表例である低減対象音としていびき音を示す図、(B)は図2の能動消音制御装置を適用した場合の効果を示す図。
【図4】図2の能動消音制御装置に対応する制御ブロック図。
【図5】(A)は騒音の小さい部分で適応を一時的に停止した場合にLMS法を適用したシミュレーション結果を示す図、(B)は適応動作を連続で行った場合にLMS法を適用したシミュレーション結果を示す図。
【図6】図1(A)の能動消音制御装置の第2の具体例のブロック図。
【図7】本発明の第2の実施形態に係る能動消音制御装置のブロック図。
【図8】図7の能動消音制御装置の第1の具体例のブロック図。
【図9】図7の能動消音制御装置の第2の具体例のブロック図。
【図10】図9の能動消音制御装置を実験するためのシステム構成図。
【図11】直接法LMSを適用した場合の時系列波形を示す図。
【図12】直接法LMSを適用した場合の周波数ごとの制御効果を示す図。
【図13】直接法FTFを適用した場合の時系列波形を示す図。
【図14】直接法FTFを適用した場合の周波数ごとの制御効果を示す図。
【図15】低減対象音がいびき音の場合に、能動消音制御装置をオフした場合と、LMS法を適用した場合と、FTF法を適用した場合での低減対象音を低減する効果を示す図。
【図16】誤差マイクの効果について、能動消音制御装置をオフした場合と、LMS法を適用した場合と、FTF法を適用した場合での低減対象音を低減する効果を示す図。
【図17】本発明の第3の実施形態に係る能動消音制御装置のブロック図。
【図18】図17の能動消音制御装置の第1の具体例のブロック図。
【図19】図17の能動消音制御装置の第2の具体例のブロック図。
【図20】(A)は図19の能動消音制御装置での制御サンプリング回数にしたがって係数λを更新した場合の制御効果を示す図、(B)は制御サンプリング回数にしたがって係数λの変化履歴を示す図。
【図21】本発明の第4の実施形態に係る能動消音制御装置のブロック図。
【図22】(A)及び(B)は図21に示すように誤差マイクを2つ設置した場合のクロストークを説明するための図。
【図23】図21の効果を検証するための実験のシステム構成を示す図。
【図24】(A)は第1の誤差マイクによるホワイトノイズを低減する効果を示す図、(B)は第1の誤差マイクによるホワイトノイズを低減する効果を示す図。
【図25】(A)は第1の誤差マイクによるいびき音を低減する効果を示す図、(B)は第1の誤差マイクによるいびき音を低減する効果を示す図。
【図26】周波数帯ごとの第1及び第2の誤差マイクによるいびき音を低減する効果を示す図。
【符号の説明】
【0082】
101…低減対象音、102,2102…制御音源部、103…参照信号生成部、104…デジタルフィルタ演算部、105…判別部、106,2104…フィルタ係数変更部、107,201,202,203,601,602,603,2105…適応フィルタ部、108,2106…係数更新停止部、109…フィルタ係数記憶部、110,2101…誤差マイク、111,2107…信号算出部、204…固定フィルタ演算部、701…係数初期化部、1701…フィルタ係数調整部、1702…推定誤差算出部、1901…係数λ算出/係数調整部。
【技術分野】
【0001】
本発明は、音圧レベルが変動する非定常音、あるいは、音源が停止状態(無音)を有する断続音、あるいは、移動する音源を対象に、参照信号供給手段、誤差マイク、制御用スピーカを用いて騒音源を低減する能動消音であって、誤差マイク位置での音圧抑圧化を実現するための制御方式及び制御装置に関するものである。
【背景技術】
【0002】
能動制御において、一般的に使用されている演算アルゴリズムであるFiltered−X LMSアルゴリズムでは、音圧レベルの変動が大きい騒音や音響パスが変動する移動音源にはこの音響経路での誤差要因が制御効果劣化につながり、制御が不安定になる問題をかかえてしまう。また、LMSアルゴリズムは勾配法型のアルゴリズムであるため計算量が少なく安定性は高いものの、収束が遅いという致命的な問題もあり、これらの理由により上記変動、移動騒音には適用困難であった。
【0003】
そこで、考え出された対策が、直接法アルゴリズムであり、例えば、移動する定常音を対象にしたアルゴリズム(例えば、非特許文献1、2参照)では、制御フィルタCの係数を更新するための適応フィルタC以外に、1つの固定フィルタK、その適応フィルタK、及び、適応フィルタDを設置し、誤差マイク信号を基に仮想誤差信号をつくり上記適応フィルタ係数の更新を行う。ここで示した係数更新計算には、従来のFiltered−Xと同じ勾配法型のLMSアルゴリズムを用いていることから、収束速度はほぼ等しく改善できないが、制御不安定要因である誤差経路がないために、移動する音に対しても発散することなく、安定した制御が可能である。
【0004】
そして、この安定した制御状態でさらに高速収束を目指し開発されたものが、直接法FTF法である。
【非特許文献1】雉本、他3名「誤差経路の変化に高速に追従するアルゴリズムを用いた能動的音響制御」、日本機械学会第14回環境工学総合シンポジウム2004講演論文集p42−p45
【非特許文献2】佐々木、他3名「外部入射騒音に対する能動的音響制御」、日本機械学会第13回環境工学総合シンポジウム2003講演論文集p42−p45
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、直接法FTFでも変動が大きい非定常音に対してはレベル変動が大きいことから不安定になり、追従が困難である。
【0006】
この発明は、上述した事情を考慮してなされたものであり、発散することなく安定して、かつ、高速に誤差マイク音圧を抑制する制御を行う能動消音制御装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述の課題を解決するため、本発明の能動消音制御装置は、音源から発せられた低減対象音を低減する能動消音制御装置において、前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、前記レベル変化量とある閾値範囲とを比較する比較手段と、フィルタ係数が可変な適応フィルタと、前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数の更新を停止する停止手段と、前記更新ごとに前記フィルタ係数を記憶する記憶手段と、前記記憶されているフィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、前記制御信号に基づいて制御音を発生する制御音源と、前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備することを特徴とする。
【0008】
本発明の能動消音制御装置は、音源から発せられた低減対象音を低減する能動消音制御装置において、前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、前記レベル変化量とある閾値範囲とを比較する比較手段と、フィルタ係数が可変な適応フィルタと、前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数を初期化する初期化手段と、前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、前記制御信号に基づいて制御音を発生する制御音源と、前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備することを特徴とする。
【0009】
本発明の能動消音制御装置は、音源から発せられた低減対象音を低減する能動消音制御装置において、前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、前記低減対象音の低減を制御する制御音を発生する制御音源と、前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、前記参照信号と、前記合成音圧に対応する誤差信号とに基づいて、推定誤差を算出する算出手段と、フィルタ係数が可変な適応フィルタと、前記推定誤差に基づいて前記フィルタ係数を調整する調整手段と、前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備し、前記制御音源は前記制御信号に基づいて制御音を発生することを特徴とする。
【0010】
本発明の能動消音制御装置は、音源から発せられた低減対象音を低減する能動消音制御装置において、前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、前記レベル変化量とある閾値範囲とを比較する比較手段と、フィルタ係数が可変な第1の適応フィルタと、前記レベル変化量が前記閾値範囲外である場合には、前記第1の適応フィルタの前記フィルタ係数の更新を停止する第1の停止手段と、前記第1の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第1の制御信号を生成する第1の制御信号生成手段と、前記第1の制御信号に基づいて第1の制御音を発生する第1の制御音源と、前記第1の制御音と、前記低減対象音との第1の合成音圧を検出する第1の誤差マイクと、前記第1の合成音圧に対応する誤差信号と、前記第1の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第1の適応フィルタの前記フィルタ係数を設定する第1の設定手段と、フィルタ係数が可変な第2の適応フィルタと、前記レベル変化量が前記閾値範囲外である場合には、前記第2の適応フィルタの前記フィルタ係数の更新を停止する第2の停止手段と、前記第2の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第2の制御信号を生成する第2の制御信号生成手段と、前記第2の制御信号に基づいて第2の制御音を発生する第2の制御音源と、前記第2の制御音と、前記低減対象音との第2の合成音圧を検出する第2の誤差マイクと、前記第2の合成音圧に対応する誤差信号と、前記第2の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第2の適応フィルタの前記フィルタ係数を設定する第2の設定手段と、を具備することを特徴とする。
【0011】
本発明の能動消音制御方法は、音源から発せられた低減対象音を低減する能動消音制御方法において、前記低減対象音に基づいて参照信号を生成し、前記参照信号のレベル値と該レベル値のレベル変化量を検出し、前記レベル変化量とある閾値範囲とを比較し、フィルタ係数が可変な適応フィルタを用意し、前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数の更新を停止し、前記更新ごとに前記フィルタ係数を記憶する記憶手段を用意し、前記記憶されているフィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、前記制御信号に基づいて制御音を発生し、前記制御音と、前記低減対象音との合成音圧を検出し、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定することを特徴とする。
【0012】
本発明の能動消音制御方法は、音源から発せられた低減対象音を低減する能動消音制御方法において、前記低減対象音に基づいて参照信号を生成し、前記参照信号のレベル値と該レベル値のレベル変化量を検出し、前記レベル変化量とある閾値範囲とを比較し、フィルタ係数が可変な適応フィルタを用意し、前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数を初期化し、前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、前記制御信号に基づいて制御音を発生し、前記制御音と、前記低減対象音との合成音圧を検出し、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定することを特徴とする。
【0013】
本発明の能動消音制御方法は、音源から発せられた低減対象音を低減する能動消音制御方法において、前記低減対象音に基づいて参照信号を生成し、前記低減対象音の低減を制御する制御音を発生し、前記制御音と、前記低減対象音との合成音圧を検出し、前記参照信号と、前記合成音圧に対応する誤差信号とに基づいて、推定誤差を算出し、フィルタ係数が可変な適応フィルタを用意し、前記推定誤差に基づいて前記フィルタ係数を調整し、前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定し、前記制御音は前記制御信号に基づいて発生されることを特徴とする。
【0014】
本発明の能動消音制御方法は、音源から発せられた低減対象音を低減する能動消音制御方法において、前記低減対象音に基づいて参照信号を生成し、前記参照信号のレベル値と該レベル値のレベル変化量を検出し、前記レベル変化量とある閾値範囲とを比較し、フィルタ係数が可変な第1の適応フィルタを用意し、前記レベル変化量が前記閾値範囲外である場合には、前記第1の適応フィルタの前記フィルタ係数の更新を停止し、前記第1の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第1の制御信号を生成し、前記第1の制御信号に基づいて第1の制御音を発生し、前記第1の制御音と、前記低減対象音との第1の合成音圧を検出し、前記第1の合成音圧に対応する誤差信号と、前記第1の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第1の適応フィルタの前記フィルタ係数を設定し、フィルタ係数が可変な第2の適応フィルタを用意し、前記レベル変化量が前記閾値範囲外である場合には、前記第2の適応フィルタの前記フィルタ係数の更新を停止し、前記第2の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第2の制御信号を生成し、前記第2の制御信号に基づいて第2の制御音を発生し、前記第2の制御音と、前記低減対象音との第2の合成音圧を検出し、前記第2の合成音圧に対応する誤差信号と、前記第2の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第2の適応フィルタの前記フィルタ係数を設定することを特徴とする。
【発明の効果】
【0015】
本発明の能動消音制御装置及び方法によれば、発散することなく安定して、かつ、高速に誤差マイク音圧を抑制する制御を行うことができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しながら本発明の実施形態に係る能動消音制御装置及び方法について詳細に説明する。まず、本実施形態で使用されるLMSアルゴリズム(LMS法)、直接法アルゴリズムについて簡単に説明しておく。
能動制御において、一般的に使用されている演算アルゴリズムとしてFiltered−X LMSアルゴリズムがある。このアルゴリズムは制御音源から誤差マイクまでの空間伝達経路の特性G(誤差経路)を事前に同定し、この特性が既知かつ時不変である仮定に基づいて制御フィルタCを更新するものである。つまり、Gを固定フィルタ係数とするものである。
【0017】
制御音源から誤差マイクまでの空間伝達経路の特性Gを事前に同定しないという直接法アルゴリズムは、誤差経路Gがないかわりに、制御フィルタCの更新には、複数の制御フィルタ、適応フィルタを使うのが特徴である。
【0018】
(第1の実施形態)
本発明の第1の実施形態に係る能動消音制御装置について図1(A)を参照して説明する。
本実施形態の能動消音制御装置は、制御音源部102、参照信号生成部103、デジタルフィルタ演算部104、判別部105、フィルタ係数変更部106、誤差マイク110、信号算出部111を備えている。フィルタ係数変更部106は、適応フィルタ部107、係数更新停止部108、フィルタ係数記憶部109を備えている。本実施形態の能動消音制御装置は、音源から発せられた低減対象音101を低減するためのものである。
【0019】
参照信号生成部103は、低減対象音101を受音し、この低減対象音101に基づいて参照信号を生成し、この生成した参照信号をデジタルフィルタ演算部104、判別部105、フィルタ係数変更部106に供給する。
判別部105は、参照信号のレベル(絶対電圧)とこのレベルが時間経過にしたがってどの程度変化したかを示すレベル変化量(相対電圧)とを検出する。判別部105では、ある閾値範囲を設定しておき、レベル変化量とこの閾値範囲とを比較し、レベル変化量がこの閾値範囲外の値であるか否かを示した信号を係数更新停止部108に出力する。
【0020】
フィルタ係数変更部106は、参照信号に基づいてデジタルフィルタ演算部104の係数を変更する。
係数更新停止部108は、判別部105の判定結果を受けて、判定結果に応じて適応フィルタ部107の係数の更新を停止する。係数更新停止部108は、例えば、レベル変化量が予め設定されたある閾値範囲外であるという信号を判別部105から受け取った場合には、適応フィルタ部107の係数の更新を停止する。より具体的な動作の一例について後に数式(数1)を参照して説明する。
フィルタ係数記憶部109は、適応フィルタ部107の係数の更新ごとに、この係数を記憶する。したがって、係数更新停止部108が係数の更新を停止する直前の、適応フィルタ部107の係数も記憶している。
適応フィルタ部107は、信号算出部111からの出力信号に基づいて、フィルタ係数を更新する。そして、適応フィルタ部107は、この更新されたフィルタ係数をデジタルフィルタ演算部104に出力する。
【0021】
制御音源部102は、低減対象音101を低減するための制御音を発生する。
誤差マイク110は、制御音源部102からの制御音と低減対象音101との合成音圧を検出する。
デジタルフィルタ演算部104は、適応フィルタ部107で新たに求められた係数を受け取り、この係数に基づいて参照信号に対してフィルタリング処理を行い、制御音源部102が制御音を発生するために使用する制御信号を生成する。
【0022】
信号算出部111は、フィルタ係数変更部106からの信号と誤差マイク110からの誤差信号とを基に、フィルタ係数を変更するために必要な信号を出力するための信号を算出する。フィルタ係数変更部106からの信号は、例えば、制御信号を適応フィルタ部107でフィルタリングした信号である。
【0023】
ここで、係数更新停止部108の具体的な動作について説明する。
係数更新停止部108は、判別部105から係数更新の停止に対応する信号を受け取った場合には、適応フィルタ部107で新たに求められた係数のデジタルフィルタ演算部104への転送を停止する。
【0024】
具体的な一例について、図1(B)に示す一般的な適応フィルタ部のブロック図で説明する。係数更新停止部108は、係数更新を停止する場合には、適応フィルタ更新計算式である下記の(数1)に含まれる定数μを0にする。この場合、常に適応フィルタ部107では更新計算が実行されデジタルフィルタ演算部104への転送も実行されているが、転送の前後での差分がゼロであるため、結果的には係数更新が停止していることと等価となる。
【0025】
<C>N+1=<C>N−μ・eN・<x>k・・・(数1)
ここで、<A>はベクトルAを示すとする。フィルタCの添え字Nは更新回数を表し、現在をNとすると、左辺は更新後(未来)のCフィルタを示す。k番目のCフィルタ(スカラー値)の更新は
C(k)N+1=C(k)N−μ・eN(n)・x(n−k+1)、(k=1,2,…,M)、
(C1,C2,…, CM)TN+1=(C1,C2,…,CM)TN
−μ・eN・(x(n),x(n−1),…,x(n−M+1))T
なお、以後に記述のフィルタK、Lについても添え字表記は同様の意味を表す。
【0026】
係数変更停止状態では、外部入力x(n)の影響を受けないことから、安定した制御が可能になる。大きな変動が収まり閾値範囲内に戻ったときは、係数変更停止を開始する直前に前記記憶部に保存した適応フィルタ係数を読み出し、フィルタ更新を再開する、あるいは、定数μをもとの定数に戻し、フィルタ更新を再開する。
【0027】
以上に説明したように、誤差マイク110と低減対象音101との間の誤差経路(空間伝達関数)の同定を行わずに誤差マイク110での音圧の抑制を実現し、判別部105に設けられた閾値範囲外では、フィルタ係数変更部106の係数変更を停止することで、レベル変動が大きい非定常音の低減対象音101、あるいは、音源が停止状態(無音)を有する断続音、あるいは、移動する音源でも誤差マイク音圧の抑制を実現することができる。
【0028】
(第1の具体例)
第1の実施形態に係る能動消音制御装置の第1の具体例について図2を参照して説明する。以下、既に説明した装置部分と同様なものは同一の番号を付してその説明を省略する。
第1の具体例の能動消音制御装置では、フィルタ係数変更部106は、適応フィルタ部107として、適応フィルタ部201,202,203、固定フィルタ演算部204を備えている。適応フィルタ部201は制御フィルタK、LMS計算部を備え、適応フィルタ部202は制御フィルタD、LMS計算部を備え、適応フィルタ部203は制御フィルタC、LMS計算部を備えている。また、信号算出部111は、3つの適応フィルタ部201,202,203の出力と誤差マイク110の出力を基に、適応フィルタ部201,202,203の更新に必要な2つの仮想誤差信号(e1N、e2N)を算出する。適応フィルタ部201,202,203の係数更新計算にはLMS法を適用することで、誤差マイク音圧の抑制を実現する。
【0029】
騒音源の音圧レベルが大きく変動し、判別部105が、参照信号生成部103からの参照信号の振幅をxとすると下記の数式(数2)の判別式で示す閾値ξが0.01(ダイナミックレンジ10dBに相当)以下になったと判定したとする。この場合は、係数更新停止部108が適応係数更新を停止する。ただし、適応直後から一定時間経過までは適応動作を継続する必要があるため、ξの初期値は2程度の値を入力する。
【0030】
ξ=κ・ξ+(1−κ)・x2≦0.01 …(数2)
x:参照信号の振幅、κ:0.999
この式は、左辺のξ(新しい値)を右辺のξ(現在の値)から逐次更新して求めることを意味する。
【0031】
係数更新停止部108は、係数更新停止の場合には、デジタルフィルタ演算部104に対して適応フィルタ部203で新たに求めた係数CN+1の転送を行わない。係数更新停止部108は、最低限、適応フィルタ部203に含まれている制御フィルタCの更新を停止すればよいが、同時に適応フィルタ部201,202にそれぞれ含まれる制御フィルタK、Dの更新停止を行ってもよい。
【0032】
また、この代わりに、係数更新停止部108は制御フィルタCに関する適応フィルタ更新計算式の定数γcを0にしてもよい。係数更新停止部108は、最低限、制御フィルタCの適応計算定数をゼロにすればよいが、同時に残りの制御フィルタK、Dに関する定数γD、γKもゼロにしてもよい。
【0033】
なお、γC、γD、γKはそれぞれ、定数μC、μD、μKを含む以下の式から算出する。
【0034】
<C>N+1=<C>N−γC・<s>N・e2N
<D>N+1=<D>N−γD・<r>N・e1N
<K>N+1=<K>N−γK・<u>N・e1N
γC=μC/(1+μC‖<s>N‖2);γC>0
γD=μD/(1+μD‖<r>N‖2+μK‖<u>N‖2);γD>0
γK=μK/(1+μD‖<r>N‖2+μK‖<u>N‖2);γK>0
次に、適応制御計算式の詳細を以下の数式(数3)に示す。<C>Nは更新回数N回目(現在)のM個の列ベクトルであり、<s>Nは同様にM個の列ベクトルであり、
<C>N=(C(1),C(2),…,C(M))TN,(k=1,2,…,M)…(数3)
<s>N=(s(1),s(2),…,s(M))TN,(k=1,2,…,M)…(数3)
e2Nは更新回数N回目(現在)の2つ目の仮想誤差信号のスカラー値(AD変換で取り込んだ1個のデータ)であり、したがって、
<C>N+1=<C>N−γC・<s>N・e2N…(数3)
のフィルタ更新式の意味は、k番目の係数(スカラー値)をC(k)とすると、以下のように書き直すことができる。
【0035】
C(k)N+1=C(k)N−γC・s(n−k+1)・e2N(n),(k=1,2,…,M−1)…(数3)
例えば、更新後の1番目の係数は現在の1番目のフィルタCから、現在取り込んだSとe2のスカラー値のかけ算に係数γCを掛けたものを引いた値となる。
【0036】
C(1)N+1=C(1)N−γC・s(n)N・e2N(n)…(数3)
この要領で、係数更新停止部108は、k=2からM−1までの全てのフィルタ係数を更新する。
【0037】
次に、実際に非定常音の代表例である図3(A)に示すいびき音に対して、従来法と本提案手法を適用し、同アルゴリズムの有意性を検証した例について図3(B)を参照して説明する。
【0038】
まずはじめは従来のFiltered−Xについて実施する。図1に示すブロック図の中で騒音源から誤差マイクまでの空間伝達関数W、騒音源から参照検出部までの空間伝達関数W、スピーカから誤差マイクまでの空間伝達関数Cはすべて実環境下で計測した値を用いる。騒音源には予め録音したいびき音を用いて、従来法によるシミュレーションで検証した結果を図3(B)に示す。図3(B)に示した振幅のうち、黒の線で示したものが制御前の振幅に相当し、グレーの線で示したものが制御後の振幅に対応する。図3(B)に示すように、従来法では、第1パターン音(1回目のいびき)では制御遅延により収束できず、第1パターンより変化量の大きい第2パターン音(2回目のいびき)で制御は発散してしまう。
【0039】
次に、図2に示した能動消音制御装置により直接法LMSを用いて、無音時に外部雑音としてホワイトノイズを加えた状態で、先に示した判別部の閾値を用いて、適応係数更新停止対策案の有効性を評価した場合について図5(A)、図5(B)を参照してシミュレーション結果を説明する。図2の能動消音制御装置に対応する図4に示す制御ブロック図において実環境下で計測した値を用いてシミュレーションを実施した。図4は、一例として、移動する定常音を対象にしたアルゴリズムを示す。
【0040】
図4の制御ブロックでは、制御フィルタCの係数を更新するための適応フィルタC以外に、1つの固定フィルタK、その適応フィルタK、及び、適応フィルタDを設置し、誤差マイク信号を基に仮想誤差信号をつくり、上記適応フィルタ係数の更新を行うのが特徴である。誤差マイク信号を基に仮想誤差信号をつくり、上記適応フィルタ係数の更新を行う。ここで示した係数更新計算には、従来のFiltered−Xと同じ勾配法型のLMSアルゴリズムを用いていることから、収束速度はほぼ等しく改善できないが、制御不安定要因である誤差経路がないために、移動する音に対しても発散することなく、安定した制御が可能である。そして、この安定した制御状態でさらに高速収束を目指し開発されたものが、直接法FTFである。
【0041】
図5は、いびき音の無音時にホワイトノイズを入れたものに対して直接法LMSを適用し、騒音の小さい部分で適応を一時的に停止した場合(図5(A))と、適応動作を連続で行った場合(図5(B))とを示した図である。図5(A)及び図5(B)に示した振幅のうち、黒の線で示したものが制御前の振幅に相当し、グレーの線で示したものが制御後の振幅に対応する。図5(A)で適応動作を停止したのは、横軸が28000から39000まで、47000から62000まで、さらに69000以降であり、図5(A)では横矢印でその範囲を示している。図5(A)と図5(B)とを比較すると、一時的に停止した場合を示した図5(A)の手法の方の制御効果が優れていた。特に4回目のいびき音では両者の差が顕著となった。すなわち、図5(B)と比較して図5(A)に示した方が制御前の振幅と制御後の振幅の差が著しい。
【0042】
(第2の具体例)
第1の実施形態に係る能動消音制御装置の第2の具体例について図6を参照して説明する。
この具体例は、図2に示した第1の具体例とは、適応フィルタ部と、信号算出部111が異なる。すなわち、適応フィルタ部201,202,203の代わりに適応フィルタ部601,602,603を設置し、適応フィルタ部601は制御フィルタK、FTF計算部を備え、適応フィルタ部602は制御フィルタD、FTF計算部を備え、適応フィルタ部603は制御フィルタC、FTF計算部を備えている。また、信号算出部111は、2つの適用フィルタ部601,602の出力と誤差マイク110の出力を基にして、適応フィルタ部601,602,603の更新に必要な信号を算出する。この具体例では、適応フィルタの係数更新計算にはFTF法を適用することで、誤差マイク110の音圧の抑制を実現する。
【0043】
FTF法とは高速トランスバーサルフィルタを使用する手法のことで、最小二乗法に属する適応アルゴリズムであり、勾配法型の上記のLMS法と比べて、計算量は大きくなるものの、収束速度はさらに早くなる特徴を有する。したがって、閾値設定した範囲外の参照信号が入力されたことで効果が劣化した際には、一度係数を初期化するほうが、効果的となる。
アルゴリズムについては「適応信号処理アルゴリズム」(飯國洋二著、東京、培風館, 2000.7 中央学, 547.1/I 11325274)に書かれており、一般的であるので詳細は省略するが、図6で示すFTF計算部への2つの入力信号を使用して誤差信号を算出し、フィルタを更新していく手法はLMS法と同様である。
ただし、FTF法のLMS法との一番の違いは、FTF法では係数更新計算が複雑で、その中に、直接法LMSでは用いられないλという定数を使って、係数の収束をコントロールする操作を行っていることである。数式で概略を説明すると数式(数4)のとおりである。
【0044】
<C>N+1=<C>N−<g>N+1・eN+1
eN+1=(yN+1+<φ>N+1*<C>N)・θN …(数4)
<g>N+1=<F(λ)>,θN=G(λ)、ここで、<A>*<B>はベクトルAとベクトルBの内積を示す。
【0045】
図6の中のフィルタCの更新ブロック図に着目すると、更新計算は以下のようになる。<g>N、eN(スカラー)はそれぞれLMS法での<s>N、e2Nに相当するが、LMS法では直接これらの値でフィルタCの更新を行っているが、FTF法ではeは、ブロック図での適応フィルタ部603への右からの入力信号yN(FTF法では目標値と呼ぶ)と左からの入力信号φNの値とから算出する。また、<g>Nは、さらに複雑な仮想誤差算出式を用いて算出される。この値を算出する過程でλという定数が用いられる。
【0046】
これまで定常音で行われたFTF法ではこのλを一定の値(固定値)として入力していたが、非定常音の制御向けにこのλを可変にさせる場合については後に図19を参照して説明する。
【0047】
(第2の実施形態)
本発明の第2の実施形態に係る能動消音制御装置について図7を参照して説明する。
本実施形態の能動消音制御装置は、第1の実施形態の能動消音制御装置とは、フィルタ係数変更部106の内部構成が異なるのみである。本実施形態のフィルタ係数変更部106は、適応フィルタ部107と、係数初期化部701を備えている。
【0048】
係数初期化部701は、判別部105が、参照信号生成部103が出力する参照信号のレベル変化量が閾値範囲外の場合、デジタルフィルタ演算部104の係数を初期化する。つまり、図1(B)に示す一般的な適応フィルタのブロック図で説明すると、一度、制御フィルタの係数Cをすべてゼロに初期化することである。例えば、上記(数1)参照。
【0049】
以上に説明したように、誤差マイク110と低減対象音101との間の誤差経路(空間伝達関数)の同定を行わずに誤差マイク110での音圧の抑制を実現し、判別部105に設けられた閾値範囲外では、フィルタ係数変更部106のフィルタ係数を初期化することで、レベル変動が大きい非定常音の低減対象音101、あるいは,音源が停止状態(無音)を有する断続音、あるいは、移動する音源でも誤差マイク音圧の抑制を実現することを特徴とする。
【0050】
(第1の具体例)
第2の実施形態に係る能動消音制御装置の第1の具体例について図8を参照して説明する。
本具体例は、図2に示した、第1の実施形態の第1の具体例から係数更新停止部108を除いて代わりに係数初期化部701を設け、さらにフィルタ係数記憶部109を除いたものである。
【0051】
係数初期化部701は、騒音源の音圧レベルが大きく変動し判別部105の閾値範囲を超えた場合に、係数を初期化する。初期化とは、例えば、すべての制御フィルタ係数をゼロにすることである。初期化する対象となるのは、最低限、制御フィルタCであるが、同時に残りの制御フィルタK、Dも初期化してもよい。
【0052】
本具体例の適応フィルタ部201,202,203は、係数更新計算をする際、従来のFiltered−Xでなく、LMS法を適用することで、すべての制御フィルタ係数をゼロにして、一から制御更新しなおしても、誤差マイク110の低減効果が劣化せずに、誤差マイク110の音圧の抑制を実現し、これを維持することができる。
【0053】
(第2の具体例)
第2の実施形態に係る能動消音制御装置の第2の具体例について図9を参照して説明する。
この具体例は、図8に示した第1の具体例とは適応フィルタ部と、信号算出部111が異なる。すなわち、適応フィルタ部201,202,203の代わりに適応フィルタ部601,602,603を設置し、適応フィルタ部601は制御フィルタK、FTF計算部を備え、適応フィルタ部602は制御フィルタD、FTF計算部を備え、適応フィルタ部603は制御フィルタC、FTF計算部を備えている。また、信号算出部111は、2つの適用フィルタ部601,602の出力と誤差マイク110の出力を基にして、適応フィルタ部601,602,603の更新に必要な信号を算出する。本具体例の能動消音制御装置は、FTF法により、すべての制御フィルタ係数を一度ゼロにしても、さらに早くもとの状態に戻すことができる。
【0054】
本具体例では、FTF法の導入を可能とし、誤差マイク110の低減効果が劣化しても制御が発散することなく、誤差マイク110の音圧の抑制を実現、維持することができる。この手法は直接法LMSよりも収束が早いことから、閾値設定した範囲外の誤差信号が入力されたことで効果が劣化した際には、一度係数を初期化する本手法が最も効果的となる。
【0055】
次に、実験例について図10、図11、図12、図13、図14を参照して説明する。図10に示す実験システム構成にて以下の条件下で、5kHzまでのランダム音に対して、直接法FTFの有効性を直接法LMSと比較評価した。
サンプリング周波数・・・10kHz
カットオフ周波数(LPF)・・・4kHz
直接法LMSの場合については図11及び図12を参照して説明し、一方、直接法FTFの場合については図13及び図14を参照して説明する。図11及び図13は、横軸の変数を時間として、誤差マイク110の時系列波形を示している。図12及び図14は、横軸の変数を周波数として、誤差マイク110の制御効果を示している。すなわち、能動消音制御装置をオンした場合(ANC on)とオフした場合(ANC off)とを比較して低減対象音を低減する効果を示す。LMS法とFTF法とを比較すると、FTF法の方が1秒以内に収束し、さらに広帯域で低下量が大きくなっているのがわかる。
【0056】
次に、非定常のいびき音について図15を参照して説明する。図15は、能動消音制御装置をオフした場合と、LMS法を使用した場合と、FTF法を使用した場合とを比較した結果を示している。図15は、適応制御開始から45秒間の誤差マイク110における時系列データを示す。
サンプリング周波数・・・10kHz
カットオフ周波数(LPF)・・・3.5kHz
図15によれば、直接法FTFのほうが早く収束しているのがわかる。
【0057】
次に、誤差マイク110の制御効果について図16を参照して説明する。図16は、横軸の変数を周波数とした誤差マイクの制御効果を示す。図16によれば、周波数のほぼ全域にわたってFTF法が効果的であり、特に高周波数域(3−4kHz)でLMS法とFTF法の差が顕著になることがわかる。
【0058】
(第3の実施形態)
本発明の第3の実施形態に係る能動消音制御装置について図17を参照して説明する。
本実施形態の能動消音制御装置は、第1の実施形態の能動消音制御装置とは、フィルタ係数変更部106の内部構成が異なるのみである。本実施形態のフィルタ係数変更部106は、フィルタ係数調整部1701と、推定誤差算出部1702を備えている。
【0059】
推定誤差算出部1702は、参照信号生成部103からの参照信号と誤差マイク110からの誤差信号とから得られる推定誤差EEを算出する。推定誤差EEは、次の数式(数5)で表現される。
【0060】
EE=10log10(Σe2/Σd2) …(数5)
e:誤差マイク信号
d:参照マイク信号
フィルタ係数調整部1701は、推定誤差EEを基にして、予め備えている、適応フィルタ部107の係数を調整する。この結果、時々刻々変化する誤差マイク信号のレベル変化に応じて、係数を可変にしながら制御することができる。
【0061】
本実施形態によれば、変動の大きな騒音や移動音に対しても、発散することなく、安定した制御を実現することができる。上述した、参照信号のレベルを判別する手法(第1の実施形態、第2の実施形態)では閾値の設定を正確に行う必要があるが、本実施形態では判別部105が不要であることからこのような設定は不要であり、この点でより安定した制御を実現することができる。
【0062】
(第1の具体例)
第3の実施形態に係る能動消音制御装置の第1の具体例について図18を参照して説明する。
本具体例は、図2に示した、第1の実施形態の第1の具体例から係数更新停止部108を除いて代わりに推定誤差算出部1702及びフィルタ係数調整部1701を設け、さらにフィルタ係数記憶部109を除いたものである。
【0063】
推定誤差算出部1702が参照信号と誤差マイク信号から得られる推定誤差EEを算出し、フィルタ係数調整部1701が推定誤差EEを基に、従来の直接法LMSでは定数であったμC、μD、μKを推定誤差EEの値を使って可変に調整する。これにより、変動の大きな騒音や移動音に対しても、発散することなく、安定した制御を実現する。
【0064】
(第2の具体例)
第3の実施形態に係る能動消音制御装置の第2の具体例について図19を参照して説明する。第1の具体例とは異なり係数更新にFTF法を適用した例である。
この具体例は、図18に示した第1の具体例とは適応フィルタ部と、信号算出部111と、フィルタ係数調整部1701が異なる。この具体例の能動消音制御装置は、フィルタ係数調整部1701を取除き代わりに係数λ算出/係数調整部1901を備えている。
【0065】
フィルタ係数調整部1701が参照信号と誤差マイク信号とから得られる推定誤差EEを算出して、係数λ算出/係数調整部1901が推定誤差EEを基に、従来の直接法FTFでは忘却係数として定数(λ=0.999など)であったλを可変に調整する。
【0066】
例えば、推定誤差EEとλの関係は以下のとおりである。
【0067】
EEE=κ・EEE+(1−κ)・EE,κ=0.999
この式は、左辺のEEE(新しい値)を右辺のEEE(現在の値)とEE(現在の値)から逐次更新して求めることを意味する。
【0068】
λ=1−10(−3.7+EEE/15)
このλの数式は一例である。
【0069】
次に、この数式でFTF法の係数λを更新した場合の制御効果について図20(A)、図20(B)を参照して説明する。図20(A)及び図20(B)は、横軸の変数として制御サンプリング回数(経過時間を示す)を表し、図20(A)の縦軸の変数は制御前後の誤差マイクの低減量(dB)を表し、図20(B)の縦軸の変数はλ値を表す。図20(A)及び図20(B)によれば、λを固定した場合と比べて、可変にした場合のほうが、発散せずに十分低下しているのがわかる。
【0070】
(第4の実施形態)
本発明の第4の実施形態に係る能動消音制御装置について図21を参照して説明する。
本実施形態の能動消音制御装置は、2本の誤差マイク110、2101を用いて、同時に2つのマイク音圧を抑制するためのものである。
【0071】
本実施形態は、図1に示した能動消音制御装置に加えて、誤差マイク2101、制御音源部2102、デジタルフィルタ演算部2103、フィルタ係数変更部2104、信号算出部2107を備えている。さらに、フィルタ係数変更部2104は、適応フィルタ部2105、係数更新停止部2106を備えている。これらの図21の新しい装置部分は、図1の同一名称の装置部分と同様な機能を有する。
【0072】
本実施形態では、誤差マイク110、2101と制御音源部102、2102間の誤差経路(空間伝達関数)の同定を行わずに2つ誤差マイク110,2101それぞれでの音圧を同時に抑制し、判別部105に設けられた閾値範囲外では、フィルタ係数変更部106、2104の係数変更を停止することで、レベル変動が大きい非定常音の低減対象音101、あるいは、音源が停止状態(無音)を有する断続音、あるいは、移動する音源でも2つの誤差マイクの音圧を同時に抑制することができる。
【0073】
耳元に誤差マイクを近づけ、両耳元での消音を実現することを想定した場合で、かつ、通常は誤差マイクとスピーカ間の距離が離れている場合は、クロストークの影響も受けて、その音響伝達関数分も計算に考慮した制御アルゴリズムでなければ、2つの誤差マイクを同時に低減することは困難であった。しかし、本実施形態によれば、参照マイクのみを共有化するだけでも同時に誤差マイクを低減することができる。
【0074】
特に、図22(A)、図22(B)に示すように、制御音源部102から誤差マイク110までの距離r11に対して、隣の制御音源部2102から誤差マイク110までの距離r21が概ね3倍以上、制御音源部2102から誤差マイク2101までの距離r22に対して、隣の制御音源部102から誤差マイク2101までの距離r12が概ね3倍以上を満たす位置に配すると、音圧は距離に半比例して減衰するため、距離比が3倍になり約10dB=10log1032クロストーク音が低減する。したがって、クロス項を考慮していないアルゴリズムが適用可能となる。
【0075】
次に、図23に示す実験システム構成にて、ランダム音(ホワイトノイズ)を鳴らした場合の結果について図24(A)、図24(B)を参照して説明する。また、いびき音の場合の結果について図25(A)、図25(B)を参照して説明する。
【0076】
図24の場合も図25の場合もともに、本実施形態の能動消音制御装置をオンにする(ANC ON)と、高周波数まで十分に低下しているのがわかる。図中の数字は200Hzから4kHzまでの低下量(積分値)であるが、いびき音の場合、ランダム音に比べて約10dB劣化しているが、これは200Hz付近でまったく音が低下しているためである。ランダム音の場合は、上記積分値に対するこの帯域の寄与が低いのに対して、いびき音は寄与が高いために差が出る。
【0077】
次に、帯域を絞って、図25と同じ条件でいびき音を制御した結果について図26を参照して説明する。何れの周波数帯域でも十分に2つの誤差マイクにより対象音を低減することができ、本実施形態の準2chアルゴリズムが有効であることがわかる。
【0078】
以上に示した実施形態によれば、参照信号のレベル(絶対電圧)とレベル変化量(相対電圧)から、対象騒音の変動状態を判定し、ある時間帯は制御フィルタC係数を固定にしたまま、変化させずに実行したり、制御効果が劣化しだしたら制御フィルタCを一度、初期化して制御前の状態に戻してから制御を行うことで騒音レベルの変動や騒音源位置の移動に追従することが可能となる。
【0079】
さらに、本実施形態によれば、誤差信号と参照信号を使い制御効果に関連する推定誤差値を算出し、これを基に常にフィルタ係数を微調整することで、さらに制御を安定させ、高速収束を可能にし、変動の激しい非定常音の制御、高速移動音源にも適応可能とすることができる。
【0080】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【図面の簡単な説明】
【0081】
【図1】(A)は本発明の第1の実施形態に係る能動消音制御装置のブロック図、(B)は一般的な適応フィルタ部のブロック図。
【図2】図1(A)の能動消音制御装置の第1の具体例のブロック図。
【図3】(A)は非定常音の代表例である低減対象音としていびき音を示す図、(B)は図2の能動消音制御装置を適用した場合の効果を示す図。
【図4】図2の能動消音制御装置に対応する制御ブロック図。
【図5】(A)は騒音の小さい部分で適応を一時的に停止した場合にLMS法を適用したシミュレーション結果を示す図、(B)は適応動作を連続で行った場合にLMS法を適用したシミュレーション結果を示す図。
【図6】図1(A)の能動消音制御装置の第2の具体例のブロック図。
【図7】本発明の第2の実施形態に係る能動消音制御装置のブロック図。
【図8】図7の能動消音制御装置の第1の具体例のブロック図。
【図9】図7の能動消音制御装置の第2の具体例のブロック図。
【図10】図9の能動消音制御装置を実験するためのシステム構成図。
【図11】直接法LMSを適用した場合の時系列波形を示す図。
【図12】直接法LMSを適用した場合の周波数ごとの制御効果を示す図。
【図13】直接法FTFを適用した場合の時系列波形を示す図。
【図14】直接法FTFを適用した場合の周波数ごとの制御効果を示す図。
【図15】低減対象音がいびき音の場合に、能動消音制御装置をオフした場合と、LMS法を適用した場合と、FTF法を適用した場合での低減対象音を低減する効果を示す図。
【図16】誤差マイクの効果について、能動消音制御装置をオフした場合と、LMS法を適用した場合と、FTF法を適用した場合での低減対象音を低減する効果を示す図。
【図17】本発明の第3の実施形態に係る能動消音制御装置のブロック図。
【図18】図17の能動消音制御装置の第1の具体例のブロック図。
【図19】図17の能動消音制御装置の第2の具体例のブロック図。
【図20】(A)は図19の能動消音制御装置での制御サンプリング回数にしたがって係数λを更新した場合の制御効果を示す図、(B)は制御サンプリング回数にしたがって係数λの変化履歴を示す図。
【図21】本発明の第4の実施形態に係る能動消音制御装置のブロック図。
【図22】(A)及び(B)は図21に示すように誤差マイクを2つ設置した場合のクロストークを説明するための図。
【図23】図21の効果を検証するための実験のシステム構成を示す図。
【図24】(A)は第1の誤差マイクによるホワイトノイズを低減する効果を示す図、(B)は第1の誤差マイクによるホワイトノイズを低減する効果を示す図。
【図25】(A)は第1の誤差マイクによるいびき音を低減する効果を示す図、(B)は第1の誤差マイクによるいびき音を低減する効果を示す図。
【図26】周波数帯ごとの第1及び第2の誤差マイクによるいびき音を低減する効果を示す図。
【符号の説明】
【0082】
101…低減対象音、102,2102…制御音源部、103…参照信号生成部、104…デジタルフィルタ演算部、105…判別部、106,2104…フィルタ係数変更部、107,201,202,203,601,602,603,2105…適応フィルタ部、108,2106…係数更新停止部、109…フィルタ係数記憶部、110,2101…誤差マイク、111,2107…信号算出部、204…固定フィルタ演算部、701…係数初期化部、1701…フィルタ係数調整部、1702…推定誤差算出部、1901…係数λ算出/係数調整部。
【特許請求の範囲】
【請求項1】
音源から発せられた低減対象音を低減する能動消音制御装置において、
前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、
前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、
前記レベル変化量とある閾値範囲とを比較する比較手段と、
フィルタ係数が可変な適応フィルタと、
前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数の更新を停止する停止手段と、
前記更新ごとに前記フィルタ係数を記憶する記憶手段と、
前記記憶されているフィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、
前記制御信号に基づいて制御音を発生する制御音源と、
前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備することを特徴とする能動消音制御装置。
【請求項2】
音源から発せられた低減対象音を低減する能動消音制御装置において、
前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、
前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、
前記レベル変化量とある閾値範囲とを比較する比較手段と、
フィルタ係数が可変な適応フィルタと、
前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数を初期化する初期化手段と、
前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、
前記制御信号に基づいて制御音を発生する制御音源と、
前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備することを特徴とする能動消音制御装置。
【請求項3】
音源から発せられた低減対象音を低減する能動消音制御装置において、
前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、
前記低減対象音の低減を制御する制御音を発生する制御音源と、
前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、
前記参照信号と、前記合成音圧に対応する誤差信号とに基づいて、推定誤差を算出する算出手段と、
フィルタ係数が可変な適応フィルタと、
前記推定誤差に基づいて前記フィルタ係数を調整する調整手段と、
前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備し、
前記制御音源は前記制御信号に基づいて制御音を発生することを特徴とする能動消音制御装置。
【請求項4】
前記設定手段は、LMS法を使用して前記フィルタ係数を設定することを特徴とする請求項1から請求項3のいずれか1項に記載の能動消音制御装置。
【請求項5】
前記設定手段は、FTF法を使用して前記フィルタ係数を設定することを特徴とする請求項1から請求項3のいずれか1項に記載の能動消音制御装置。
【請求項6】
音源から発せられた低減対象音を低減する能動消音制御装置において、
前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、
前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、
前記レベル変化量とある閾値範囲とを比較する比較手段と、
フィルタ係数が可変な第1の適応フィルタと、
前記レベル変化量が前記閾値範囲外である場合には、前記第1の適応フィルタの前記フィルタ係数の更新を停止する第1の停止手段と、
前記第1の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第1の制御信号を生成する第1の制御信号生成手段と、
前記第1の制御信号に基づいて第1の制御音を発生する第1の制御音源と、
前記第1の制御音と、前記低減対象音との第1の合成音圧を検出する第1の誤差マイクと、
前記第1の合成音圧に対応する誤差信号と、前記第1の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第1の適応フィルタの前記フィルタ係数を設定する第1の設定手段と、
フィルタ係数が可変な第2の適応フィルタと、
前記レベル変化量が前記閾値範囲外である場合には、前記第2の適応フィルタの前記フィルタ係数の更新を停止する第2の停止手段と、
前記第2の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第2の制御信号を生成する第2の制御信号生成手段と、
前記第2の制御信号に基づいて第2の制御音を発生する第2の制御音源と、
前記第2の制御音と、前記低減対象音との第2の合成音圧を検出する第2の誤差マイクと、
前記第2の合成音圧に対応する誤差信号と、前記第2の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第2の適応フィルタの前記フィルタ係数を設定する第2の設定手段と、を具備することを特徴とする能動消音制御装置。
【請求項7】
前記第1の設定手段及び前記第2の設定手段は、LMS法を使用して前記フィルタ係数を設定することを特徴とする請求項6に記載の能動消音制御装置。
【請求項8】
前記第1の設定手段及び前記第2の設定手段は、FTF法を使用して前記フィルタ係数を設定することを特徴とする請求項6に記載の能動消音制御装置。
【請求項9】
音源から発せられた低減対象音を低減する能動消音制御方法において、
前記低減対象音に基づいて参照信号を生成し、
前記参照信号のレベル値と該レベル値のレベル変化量を検出し、
前記レベル変化量とある閾値範囲とを比較し、
フィルタ係数が可変な適応フィルタを用意し、
前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数の更新を停止し、
前記更新ごとに前記フィルタ係数を記憶する記憶手段を用意し、
前記記憶されているフィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、
前記制御信号に基づいて制御音を発生し、
前記制御音と、前記低減対象音との合成音圧を検出し、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定することを特徴とする能動消音制御方法。
【請求項10】
音源から発せられた低減対象音を低減する能動消音制御方法において、
前記低減対象音に基づいて参照信号を生成し、
前記参照信号のレベル値と該レベル値のレベル変化量を検出し、
前記レベル変化量とある閾値範囲とを比較し、
フィルタ係数が可変な適応フィルタを用意し、
前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数を初期化し、
前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、
前記制御信号に基づいて制御音を発生し、
前記制御音と、前記低減対象音との合成音圧を検出し、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定することを特徴とする能動消音制御方法。
【請求項11】
音源から発せられた低減対象音を低減する能動消音制御方法において、
前記低減対象音に基づいて参照信号を生成し、
前記低減対象音の低減を制御する制御音を発生し、
前記制御音と、前記低減対象音との合成音圧を検出し、
前記参照信号と、前記合成音圧に対応する誤差信号とに基づいて、推定誤差を算出し、
フィルタ係数が可変な適応フィルタを用意し、
前記推定誤差に基づいて前記フィルタ係数を調整し、
前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定し、
前記制御音は前記制御信号に基づいて発生されることを特徴とする能動消音制御方法。
【請求項12】
音源から発せられた低減対象音を低減する能動消音制御方法において、
前記低減対象音に基づいて参照信号を生成し、
前記参照信号のレベル値と該レベル値のレベル変化量を検出し、
前記レベル変化量とある閾値範囲とを比較し、
フィルタ係数が可変な第1の適応フィルタを用意し、
前記レベル変化量が前記閾値範囲外である場合には、前記第1の適応フィルタの前記フィルタ係数の更新を停止し、
前記第1の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第1の制御信号を生成し、
前記第1の制御信号に基づいて第1の制御音を発生し、
前記第1の制御音と、前記低減対象音との第1の合成音圧を検出し、
前記第1の合成音圧に対応する誤差信号と、前記第1の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第1の適応フィルタの前記フィルタ係数を設定し、
フィルタ係数が可変な第2の適応フィルタを用意し、
前記レベル変化量が前記閾値範囲外である場合には、前記第2の適応フィルタの前記フィルタ係数の更新を停止し、
前記第2の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第2の制御信号を生成し、
前記第2の制御信号に基づいて第2の制御音を発生し、
前記第2の制御音と、前記低減対象音との第2の合成音圧を検出し、
前記第2の合成音圧に対応する誤差信号と、前記第2の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第2の適応フィルタの前記フィルタ係数を設定することを特徴とする能動消音制御方法。
【請求項1】
音源から発せられた低減対象音を低減する能動消音制御装置において、
前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、
前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、
前記レベル変化量とある閾値範囲とを比較する比較手段と、
フィルタ係数が可変な適応フィルタと、
前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数の更新を停止する停止手段と、
前記更新ごとに前記フィルタ係数を記憶する記憶手段と、
前記記憶されているフィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、
前記制御信号に基づいて制御音を発生する制御音源と、
前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備することを特徴とする能動消音制御装置。
【請求項2】
音源から発せられた低減対象音を低減する能動消音制御装置において、
前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、
前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、
前記レベル変化量とある閾値範囲とを比較する比較手段と、
フィルタ係数が可変な適応フィルタと、
前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数を初期化する初期化手段と、
前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、
前記制御信号に基づいて制御音を発生する制御音源と、
前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備することを特徴とする能動消音制御装置。
【請求項3】
音源から発せられた低減対象音を低減する能動消音制御装置において、
前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、
前記低減対象音の低減を制御する制御音を発生する制御音源と、
前記制御音と、前記低減対象音との合成音圧を検出する誤差マイクと、
前記参照信号と、前記合成音圧に対応する誤差信号とに基づいて、推定誤差を算出する算出手段と、
フィルタ係数が可変な適応フィルタと、
前記推定誤差に基づいて前記フィルタ係数を調整する調整手段と、
前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成する制御信号生成手段と、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定する設定手段と、を具備し、
前記制御音源は前記制御信号に基づいて制御音を発生することを特徴とする能動消音制御装置。
【請求項4】
前記設定手段は、LMS法を使用して前記フィルタ係数を設定することを特徴とする請求項1から請求項3のいずれか1項に記載の能動消音制御装置。
【請求項5】
前記設定手段は、FTF法を使用して前記フィルタ係数を設定することを特徴とする請求項1から請求項3のいずれか1項に記載の能動消音制御装置。
【請求項6】
音源から発せられた低減対象音を低減する能動消音制御装置において、
前記低減対象音に基づいて参照信号を生成する参照信号生成手段と、
前記参照信号のレベル値と該レベル値のレベル変化量を検出する検出手段と、
前記レベル変化量とある閾値範囲とを比較する比較手段と、
フィルタ係数が可変な第1の適応フィルタと、
前記レベル変化量が前記閾値範囲外である場合には、前記第1の適応フィルタの前記フィルタ係数の更新を停止する第1の停止手段と、
前記第1の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第1の制御信号を生成する第1の制御信号生成手段と、
前記第1の制御信号に基づいて第1の制御音を発生する第1の制御音源と、
前記第1の制御音と、前記低減対象音との第1の合成音圧を検出する第1の誤差マイクと、
前記第1の合成音圧に対応する誤差信号と、前記第1の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第1の適応フィルタの前記フィルタ係数を設定する第1の設定手段と、
フィルタ係数が可変な第2の適応フィルタと、
前記レベル変化量が前記閾値範囲外である場合には、前記第2の適応フィルタの前記フィルタ係数の更新を停止する第2の停止手段と、
前記第2の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第2の制御信号を生成する第2の制御信号生成手段と、
前記第2の制御信号に基づいて第2の制御音を発生する第2の制御音源と、
前記第2の制御音と、前記低減対象音との第2の合成音圧を検出する第2の誤差マイクと、
前記第2の合成音圧に対応する誤差信号と、前記第2の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第2の適応フィルタの前記フィルタ係数を設定する第2の設定手段と、を具備することを特徴とする能動消音制御装置。
【請求項7】
前記第1の設定手段及び前記第2の設定手段は、LMS法を使用して前記フィルタ係数を設定することを特徴とする請求項6に記載の能動消音制御装置。
【請求項8】
前記第1の設定手段及び前記第2の設定手段は、FTF法を使用して前記フィルタ係数を設定することを特徴とする請求項6に記載の能動消音制御装置。
【請求項9】
音源から発せられた低減対象音を低減する能動消音制御方法において、
前記低減対象音に基づいて参照信号を生成し、
前記参照信号のレベル値と該レベル値のレベル変化量を検出し、
前記レベル変化量とある閾値範囲とを比較し、
フィルタ係数が可変な適応フィルタを用意し、
前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数の更新を停止し、
前記更新ごとに前記フィルタ係数を記憶する記憶手段を用意し、
前記記憶されているフィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、
前記制御信号に基づいて制御音を発生し、
前記制御音と、前記低減対象音との合成音圧を検出し、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定することを特徴とする能動消音制御方法。
【請求項10】
音源から発せられた低減対象音を低減する能動消音制御方法において、
前記低減対象音に基づいて参照信号を生成し、
前記参照信号のレベル値と該レベル値のレベル変化量を検出し、
前記レベル変化量とある閾値範囲とを比較し、
フィルタ係数が可変な適応フィルタを用意し、
前記レベル変化量が前記閾値範囲外である場合には、前記適応フィルタの前記フィルタ係数を初期化し、
前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、
前記制御信号に基づいて制御音を発生し、
前記制御音と、前記低減対象音との合成音圧を検出し、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定することを特徴とする能動消音制御方法。
【請求項11】
音源から発せられた低減対象音を低減する能動消音制御方法において、
前記低減対象音に基づいて参照信号を生成し、
前記低減対象音の低減を制御する制御音を発生し、
前記制御音と、前記低減対象音との合成音圧を検出し、
前記参照信号と、前記合成音圧に対応する誤差信号とに基づいて、推定誤差を算出し、
フィルタ係数が可変な適応フィルタを用意し、
前記推定誤差に基づいて前記フィルタ係数を調整し、
前記フィルタ係数を使用して、前記参照信号をフィルタリングして制御信号を生成し、
前記合成音圧に対応する誤差信号と、前記制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記フィルタ係数を設定し、
前記制御音は前記制御信号に基づいて発生されることを特徴とする能動消音制御方法。
【請求項12】
音源から発せられた低減対象音を低減する能動消音制御方法において、
前記低減対象音に基づいて参照信号を生成し、
前記参照信号のレベル値と該レベル値のレベル変化量を検出し、
前記レベル変化量とある閾値範囲とを比較し、
フィルタ係数が可変な第1の適応フィルタを用意し、
前記レベル変化量が前記閾値範囲外である場合には、前記第1の適応フィルタの前記フィルタ係数の更新を停止し、
前記第1の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第1の制御信号を生成し、
前記第1の制御信号に基づいて第1の制御音を発生し、
前記第1の制御音と、前記低減対象音との第1の合成音圧を検出し、
前記第1の合成音圧に対応する誤差信号と、前記第1の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第1の適応フィルタの前記フィルタ係数を設定し、
フィルタ係数が可変な第2の適応フィルタを用意し、
前記レベル変化量が前記閾値範囲外である場合には、前記第2の適応フィルタの前記フィルタ係数の更新を停止し、
前記第2の適応フィルタの前記フィルタ係数を使用して、前記参照信号をフィルタリングして第2の制御信号を生成し、
前記第2の制御信号に基づいて第2の制御音を発生し、
前記第2の制御音と、前記低減対象音との第2の合成音圧を検出し、
前記第2の合成音圧に対応する誤差信号と、前記第2の制御信号を前記適応フィルタでフィルタリングした信号に基づいて前記第2の適応フィルタの前記フィルタ係数を設定することを特徴とする能動消音制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2007−93962(P2007−93962A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−282804(P2005−282804)
【出願日】平成17年9月28日(2005.9.28)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(502285664)東芝コンシューママーケティング株式会社 (2,480)
【出願人】(504145342)国立大学法人九州大学 (960)
【Fターム(参考)】
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月28日(2005.9.28)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(502285664)東芝コンシューママーケティング株式会社 (2,480)
【出願人】(504145342)国立大学法人九州大学 (960)
【Fターム(参考)】
[ Back to top ]