
脈波検出装置、この脈波検出装置を設けた車両、および脈波検出装置の制御方法
【課題】運転者の手の位置だけの脈波センサを作動させる脈拍検出装置を提供する。
【解決手段】ステアリングホイール1に置かれる運転者の手2の位置を検出する位置検出手段10と、少なくとも1つの発光素子21および少なくとも1つの受光素子22からなり、ステアリングホイール1に配置される複数の脈波センサ20と、複数の脈波センサ20の中から、位置検出手段10によって検出された手2の位置に対応する脈波センサ20を選択する選択手段30と、選択された発光素子21を発光させるとともに、選択された受光素子22から出力信号を選択する制御手段40と、選択された受光素子22が出力する出力信号に基づいて、運転者の脈拍を算出する脈拍算出手段50と、を有する。
【解決手段】ステアリングホイール1に置かれる運転者の手2の位置を検出する位置検出手段10と、少なくとも1つの発光素子21および少なくとも1つの受光素子22からなり、ステアリングホイール1に配置される複数の脈波センサ20と、複数の脈波センサ20の中から、位置検出手段10によって検出された手2の位置に対応する脈波センサ20を選択する選択手段30と、選択された発光素子21を発光させるとともに、選択された受光素子22から出力信号を選択する制御手段40と、選択された受光素子22が出力する出力信号に基づいて、運転者の脈拍を算出する脈拍算出手段50と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、脈波検出装置、この脈波検出装置を設けた車両、および脈波検出装置の制御方法に関する。
【背景技術】
【0002】
発光素子と受光素子を備えた装置の一つに脈波センサがある。脈波センサは、発光素子としてLEDまたはレーザダイオードなどを備え、受光素子としてフォトトランジスタやフォトダイオードなどを備える。このような脈波センサは、車両のステアリングホイールに備えられ、運転者の手から検出した脈拍データと予め測定された基準脈拍データとを比較し、居眠り検出手段として使用されている。
【特許文献1】特開昭62−15129号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、脈拍測定のために脈波センサに備えられた発光素子は常時光を出力し続けており、ステアリングホイールに置かれた手の位置に対応する部分以外の発光素子も光を出力している。常時脈波センサを動作させ続けるためにエネルギー消費が多くなるという問題もあった。
【0004】
そこで本発明の目的は、ステアリングホイールに置かれた運転者の手の位置に対応する発光素子だけを動作させる脈拍検出装置および制御方法を提供することである。
【0005】
また、運転者の脈拍を計測することによって運転者の状態を判断できる脈拍検出装置を設けた車両を提供することである。
【課題を解決するための手段】
【0006】
上記目的を解決するための本発明に係る脈拍検出装置は、ステアリングホイールに置かれる運転者の手の位置を検出する位置検出手段と、少なくとも1つの発光素子および少なくとも1つの受光素子からなり、ステアリングホイールに配置される複数の脈波センサからなる。さらに、複数の脈波センサの中から位置検出手段によって検出された手の位置に対応する脈波センサを選択する選択手段と、選択された脈波センサの発光素子を発光させるとともに、選択された脈波センサの受光素子から出力信号を選択する制御手段とを有する。そして、選択された受光素子が出力する出力信号に基づいて、運転者の脈拍を算出する脈拍算出手段を有する。
【発明の効果】
【0007】
本発明に係る脈拍検出装置および脈拍検出装置の制御方法によれば、位置検出手段で検出した手の位置に対応する脈波センサを稼動させることができるので、脈拍測定の際に手の位置に対応しない発光素子から光を出力させないようにできる。脈拍測定の際に、全ての脈波センサの発光素子および受光素子を動作させなくてもよいため消費電力を抑制することができる。
【0008】
また、車両にこのような脈拍検出装置を搭載することで、運転者の脈拍を計測し、運転者の状態を判断することができる。
【発明を実施するための最良の形態】
【0009】
本発明の脈拍検出装置の好ましい実施形態を説明する。しかし、本発明の脈拍検出装置は以下の実施形態のみには制限されない。
【0010】
[第1実施形態]
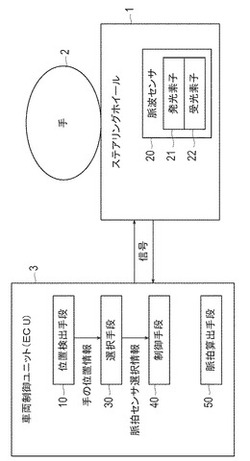
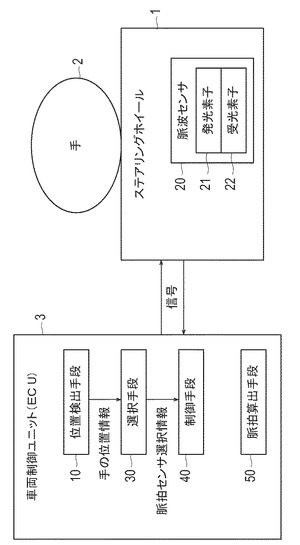
図1は、本実施形態による脈拍検出装置の説明に供する図である。
【0011】
本実施形態に係る脈拍検出装置は、ステアリングホイール1に置かれる運転者の手2の脈拍を検出する装置であり、車両の動作を電子制御すべく搭載されたECU3(Electronic Control Unit:電子制御ユニット)を用いて行われる。運転者の脈拍の検出は、ステアリングホイール1に複数設置された脈波センサ20が収集した脈波をECU3で算出することで行われる。
【0012】
ECU3は、位置検出手段10、選択手段30、制御手段40、および脈拍算出手段50の機能を有する。また、ECU3は制御手段40としての機能によって、ステアリングホイール1に複数備えられた個々の脈波センサ20を動作させるか否かを制御し、脈波センサ20の発光素子21を発光させたり、受光した受光量に依存した出力信号を出力する受光素子22を作動させたりする。
【0013】
脈波センサ20の発光素子21および受光素子22を動作させるか否かの他にも、ECU3と脈波センサ20は、脈波センサ20の発光素子21および受光素子22を制御する制御信号や、受光素子22が出力する出力信号の送受信を行っている。ECU3は受光素子22の出力信号に基づいて、発光素子21や受光素子22の動作条件を決定し、その動作条件に基づいた制御信号を脈波センサ20に送り、発光素子21の出力する光の量や、受光素子22の受光感度などを調整する。
【0014】
また、ECU3はそれぞれの手段が要する情報を記憶するためのメモリを備えた記憶部、情報を送受信するための車内LAN通信手段を用いた送受信部を有する。記憶部、送受信部については、従来の装置や方式が採用されるため説明は省略する。
【0015】
ECU3を構成するそれぞれの手段は、車内のネットワークを通じて電子制御される。位置検出手段10ではステアリングホイール1上の手2の位置を検出し選択手段30にその検出した情報を送り、選択手段30では検出した手の位置情報に対応する脈波センサ20を選択し、選択手段30では選択された脈波センサ20の動作を制御し、脈拍算出手段50では脈波センサ20からの脈波データから脈拍を算出する。それぞれの手段について詳述する。
【0016】
[位置検出手段10]
位置検出手段10は、ステアリングホイール1上に置かれた手2の位置を検出する。
【0017】
位置検出手段10によって検出された手2の位置の情報は、脈波センサ20を選択する選択手段30に送られ、位置検出は完了する。選択手段30への情報の送信が完了すると、手2の位置の検出が再び開始されるまで、位置検出手段10は一旦停止されることが好ましい。
【0018】
手2の位置が検出されない場合は、検出されるまで位置検出手段10を稼動してもよく、ある一定の時間間隔をもって稼動させてもよい。もし、所定の回数以上検出されない場合は、位置検出手段20を停止させ、脈拍検出を中止してもよい。
【0019】
位置検出が完了した場合、一旦停止されることが好ましいが、ステアリングホイール1上の手2の位置が変わった際は、位置検出手段10が再度稼動され、手2の位置の検出が開始される。
【0020】
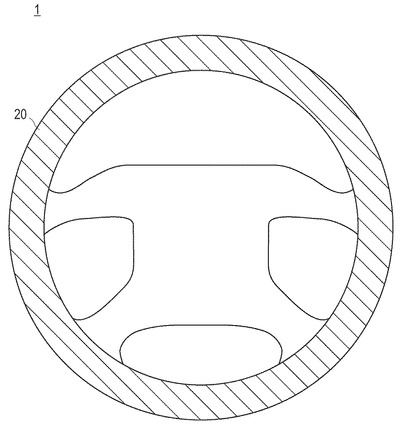
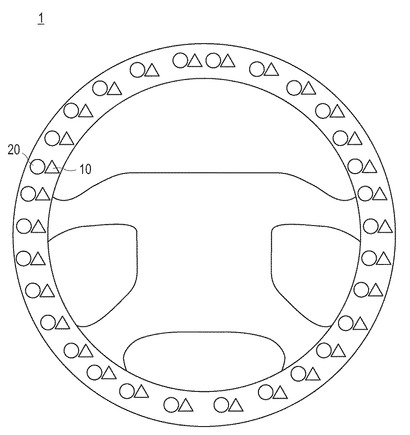
本実施形態1は、位置検出手段10として脈波センサ20用いた場合である。脈波センサ20を使用することによって、別の位置検出装置を備えないため、コスト的に有利となる。図2は、本実施形態による脈波センサ20の設置位置の説明に供する図である。図2に示すように、脈波センサ20はステアリングホイール1上に満遍なく複数配置することによって位置検出手段10として利用することができる。なお、第2実施形態において脈波センサ20以外の別の位置検出手段を使用した場合を説明する。
【0021】
位置検出手段10としての脈波センサ20の利用の仕方によって、パッシブ型、アクティブ型、パッシブ型+アクティブ型と区別する。以下詳細に説明する。
【0022】
(パッシブ型)
位置検出手段10として、脈波センサ20の受光素子22のみを用いる。受光素子22は、外部からの光を受光して受光量に依存した信号を出力する。脈波センサ20の受光素子22が光を受光したか否かを判断することによって、手2の位置を検出する。ステアリングホイール1外からの外光を光源とするので、パッシブ型と称する。外光はたとえば、車外から来る太陽光や街頭のライト、車内の車内灯やインパネからの光などである。
【0023】
ステアリングホイール1に置かれた手の位置を検出するために、所定の数の受光素子22を稼動させればよいが、全ての受光素子22を稼動させるのが好ましい。しかし、光源が車外からの太陽光や車内の室内灯等であればインパネ側の受光素子22を稼動させる必要はない。反対にインパネに設置されたライトが光源ならばインパネ側だけの受光素子22を稼動させてもよい。さらに、夜間など外光が利用できない環境のときは、運転者や同乗者が不愉快に思わないような光量、所定の時間、もしくはタイミングで車内に取り付けられたライトを稼動させてもよい。
【0024】
ステアリングホイール1に置かれた手の位置の検出は以下のようにして行われる。もし、ステアリングホイール1に設置された受光素子22上に手があると、手によって受光素子22に入る光が遮断されて受光量は外光と比較すると極端に減少する。よって、複数の受光素子22から出力されたそれぞれの信号を比較し、信号が小さい受光素子22を識別することによって、その受光素子22に対応する位置に手が置かれていることが判断できる。たとえば、出力された信号の大きさが他の信号の10%以下であれば、その信号を出力する受光素子22は遮光されていると判断することができる。
【0025】
(アクティブ型)
位置検出手段10として、脈波センサ20の発光素子21および受光素子22を用いる。受光素子22は、発光素子21が発光した光がステアリングホイール1上に置かれた手で反射された反射光を受光して受光量に依存した信号を出力する。脈波センサ20の受光素子22が反射光を受光したか否かを判断することによって、手2の位置を検出する。ステアリングホイール1から出力した光を光源とするので、アクティブ型と称する。
【0026】
ステアリングホイール1に置かれた手の位置を検出するために、全ての位置の脈波センサ20を作動させることができるが、全ての脈波センサ20を作動させるということは、ステアリングホイール1の手の位置以外の部分の発光素子21が光を出力することを意味する。手の位置以外の部分が光っているため、運転者または同乗者に対してまぶしさや不快感を与える可能性があるので、インパネ側だけの脈波センサ20を作動させた方が好ましい。
【0027】
ステアリングホイール1上に置かれた手の位置に対応する受光素子22は、発光素子21の光が手で反射した反射光を受光し、外光は手で遮断され受光されないため、出力する信号は発光素子21の発光した光量に依存する。よって、発光素子21が出力した光量に依存した信号を出力する受光素子22に対応する位置が、ステアリングホイール1上に置かれた手の位置となる。
【0028】
受光素子22は発光素子21による反射光もしくは外光を受光するので、反射光と外光とを区別するためにパルス光を使用するほうが望ましい。発光素子21からパルス光を出力することによって、受光素子22が出力する信号において、出力信号レベルが常に一定ならば外光であり、パルス状であって一定の周期で出力信号のレベルが変化しているならば、発光素子21の光が手で反射された反射光であることが判断できる。
【0029】
このように、脈波センサ20をアクティブ型として使用することによって、別の位置検出装置を備えないため、コスト的に有利となる。さらに、外光を利用できない状況においても脈波センサ20の発光素子21を光らせることで、位置の検出ができる。
【0030】
(パッシブ型+アクティブ型)
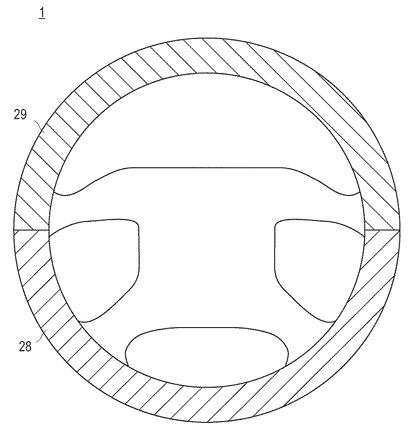
位置検出手段10として、上述したパッシブ型とアクティブ型の脈波センサ20を用いることができる。図3は、パッシブ型とアクティブ型を用いた脈波センサ20のそれぞれの設置位置の説明に供する図である。図3に示すように、ステアリングホイール1の中心線から下半分の領域がアクティブ型の脈波センサ20を位置検出手段10として利用する第1領域28であり、上半分の領域がパッシブ型の脈波センサ20を利用した第2領域29である。上下それぞれ分けることによって、車外の光を利用し、上半分では発光素子21から光を出さずに運転者の手の位置を検出することができ、コスト的に有利となる。中心線で分けずに任意の割合で第1領域28と第2領域29を分けてもよい。他にも、運転者に面したステアリングホイール1に設置された脈波センサ20をパッシブ型、運転者に面していない脈波センサ20をアクティブ型として使用してもよい。
【0031】
たとえば、外光を利用したパッシブ型で手の位置を検出できないときは、発光素子21の光を利用したアクティブ型で手の位置を検出するようにしてもよく、反対に外光が利用できるときはアクティブ型からパッシブ型にしてもよく、適宜パッシブ型とアクティブ型を切り替えてもよい。また、パッシブ型とアクティブ型の切り替えの判断として、車内に取り付けられた日射センサを使用してもよい。第1領域28と第2領域29を判断するために切り替えの判断と同じ制御方法を用いることができる。
【0032】
[脈波センサ20]
図2に示すように、脈波センサ20は、ステアリングホイール1に複数備えられ、ステアリングホイール1上に置かれた運転者の手2の脈波を測定する。脈波センサ20は後述する制御手段40によりその動作が制御される。脈波センサ20が測定した脈波データはECU3に送られ脈拍の算出が行われる。
【0033】
脈波センサ20はステアリングホイール1の運転者側およびインパネ側を含めた全体の任意の位置に満遍なく配置され、ステアリングホイール1上に貼り付けて設置してもよく、予めステアリングホイール1内に埋め込むように設置してもよい。なお、図2に示すように、手の位置と脈波センサ20の位置との対応を取りやすくするために、脈波センサ20をステアリングホイール1にアレイ状に配置してもよい。また、運転者の手が頻繁に置かれる場所に偏りをもたせて配置しても良い。
【0034】
発光素子21からの光による反射光だけを受光素子22で受光し、外光はノイズの原因となるので、外光を受光しないために、脈波センサ20の大きさは手の指先で十分に隠せるほど小さい方が好ましい。
【0035】
複数の脈波センサ20はそれぞれ独立して操作することが可能である。これにより、1つだけでなく複数の脈波を測定できるため、算出される脈拍の信頼性が向上する。
【0036】
脈波センサ20は、ステアリングホイール1外部に向かって発光する少なくとも1つ以上の発光素子21と、当該ステアリングホイール1外部からの光を受光し受光量に応じた信号を出力する少なくとも1つ以上の受光素子22とから構成される。以下、発光素子および受光素子について説明する。
【0037】
[発光素子21および受光素子22]
発光素子21は、ステアリングホイール1に備えられ、ステアリングホイール1外部に向かって光を出力するものであり、ステアリングホイール1に置かれた手の脈波を測定するためのセンサ光の発生器として機能する。受光素子22は、発光素子21とセットでステアリングホイール1に備えられ、ステアリングホイール1外部から入射した光を吸収して、吸収した光量に応じた信号を出力するものであり、脈波を測定するために発光素子21から発光されて手で反射されたセンサ光を受光する受光器として機能する。
【0038】
発光素子21は、たとえば、LEDまたはレーザダイオードなどである。受光素子22は、たとえば、フォトトランジスタやフォトダイオードなどである。
【0039】
脈波センサ20内に備えられる発光素子21および受光素子22は、それぞれ異なる大きさ、異なる数を有してもよい。発光素子21のLEDが小さく、発光する光量が十分でないなら脈波センサ20内に複数備えてもよい。受光素子22のフォトダイオードが小さく、十分な光量を受光することができないならば、脈波センサ20内に複数備えてもよい。
【0040】
[脈波測定]
発光素子21および受光素子22を用いた脈波測定について説明する。皮膚近傍に存在する毛細血管では血液中のヘモグロビン流量は脈波と有意な関係があるとされている。一定幅の血管においては血液送出時にはヘモグロビン流量が増大するので、ヘモグロビンが多いときは血液送出時、少ないときは非送出時といえる。ヘモグロビンは光を吸収する性質を有しており、ヘモグロビンが増加すれば、その分、吸収される光量も増加する。そこで、発光素子21から光を照射しその反射光を測定すると、ヘモグロビン増加に伴い吸収量が増え、反射光の量が減少することになる。従って、受光素子22で受光量を測定すればヘモグロビンの増減が検知でき、これに基づいて脈波を得ることができると共に、簡単な比例計算にて血圧値を算出することが可能となる。そのため、脈波の計測は一定の周期で連続的に行われることが望ましい。
【0041】
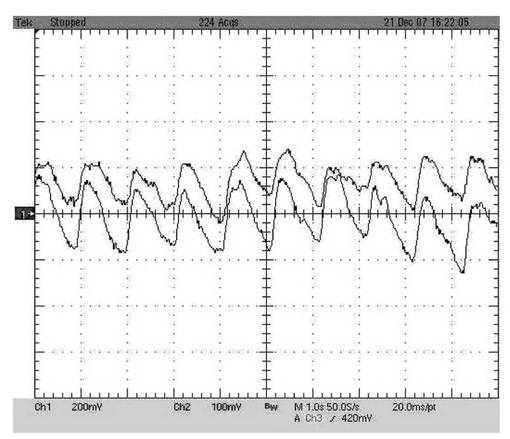
脈波データは血液送出時のヘモグロビン流量に依存しており、脈拍と共に増減を繰り返した時間変化分布をする。図4は、脈波データの一例を示すプロット図である。図の横軸は時間(1マス:1秒)を示しており、縦軸は脈波センサ20が出力した信号を示している。同時に2つの脈波センサ20がそれぞれ出力した出力信号(それぞれ1マス:200mV、100mV)が示されている。
【0042】
脈拍の測定は人体の血管内を流れる血液中のヘモグロビンの流量を検出して行われるため、発光素子21から出力されるセンサ光は、人体の血管まで届き、さらにヘモグロビンで反射され人体からそのセンサ光が射出されるような光量を有することが好ましい。さらに、ヘモグロビンが反射しやすい波長を有するセンサ光を出力できる発光素子21であればなお好ましい。同様に、受光素子22は血液中のヘモグロビンから反射されたセンサ光を吸収し、吸収した光量に応じた信号を出力するために、センサ光の波長に対し高感度で受光できるほうが好ましい。
【0043】
[選択手段30]
選択手段30は、位置検出手段から送られてきた手の位置の情報に基づいて、その情報に対応する位置に配置された脈波センサ20を選択する。選択された脈波センサ20の情報を制御手段40に送る。脈波センサ20の情報とは、たとえば、脈波センサ20の番号である。脈波センサ20の情報が送信されると、脈波センサ20の選択は完了する。
【0044】
[制御手段40]
制御手段40は、選択手段30から送られてきた脈波センサ20の位置情報に基づいて、脈波センサ20を作動させる。具体的には、発光素子21を作動させるために電圧を印加し、受光素子22を作動させるために電圧を印加する。印加する電圧の大きさによって、発光素子21では光量を調節することができ、受光素子22では感度や出力する信号の大きさ等を調整することができる。発光素子21および受光素子22の調整を行い脈拍の算出に最適な条件で脈波センサ20を作動させるため、制御手段40は脈波センサ20と連動していることが好ましい。
【0045】
たとえば、発信素子がLEDの場合、制御手段40からはパルス信号が送信され、発光素子21が稼動される。したがって、LEDはパルス発光する。
【0046】
[脈拍算出手段50]
脈波センサ20の発光素子21からは常時一定の量の光が出力されており、血液中を流れるヘモグロビンの量で反射される光の量も変化する。脈波センサ20の受光素子22は、受光量に依存した信号を出力するため、図4のようなプロットになる。出力信号の大きさが大きいということは、受光量に比例した反射光が多いことを意味し、つまり、血液中を流れるヘモグロビンの量が少ないということである。逆に、出力信号の大きさが小さいということは、光が多く吸収されるためヘモグロビンの量が多いということである。一定時間あたりのピーク数を計測することによって脈拍を算出することができる。
【0047】
[車両]
このように、本発明の脈拍検出装置は、車両内での運転者の脈拍を測定することによって、各種生体情報(疲労、ストレス、快適度等)を非侵襲、かつリアルタイムに判断することができる。特に、本発明の脈拍検出装置は脈波センサ20を選択して作動させるので、脈拍を低電圧かつ高精度に検出できる車両を提供することができる。
【0048】
[全体の制御手順]
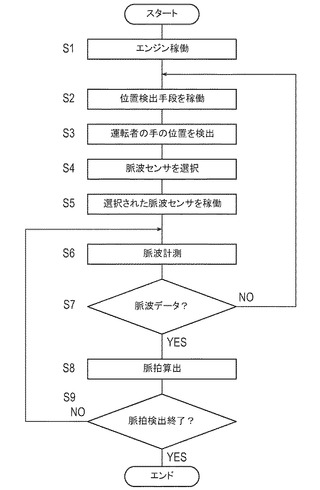
図5は、脈拍検出装置全体の制御手順を示したフローチャートである。
【0049】
運転者が車両に搭乗しエンジンを稼動させてから、運転者の脈拍を常時繰り返し算出する手順が示されている。位置検出手段10として、脈波センサ20以外の装置も想定して動作手順を説明する。
【0050】
図5に示す如く、この処理が開始されると、まずステップS1にて車両のエンジンが稼動し、車両に備えられた手段の稼動が可能となり、次のステップS2に移行する。
【0051】
ステップS2においては、上述したような位置検出手段10が稼動する。位置検出手段10が稼動すると、ステアリングホイール1上に置かれた手の位置の検出が始まり、次のステップS3に移行する。
【0052】
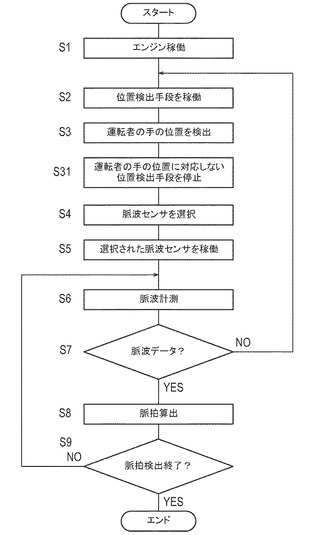
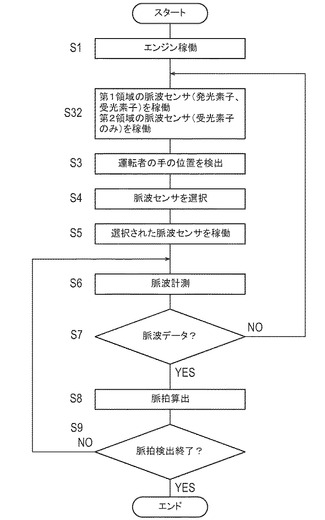
ステップS3においては、位置検出手段10によって、ステアリングホイール1上に置かれた運転者の手2の位置が検出される。手2の位置が検出されなければ、所定の時間後に再度手の位置の検出が行われる。所定の時間は、脈拍を測定するために必要な時間であれば良い。複数からなる位置検出手段10の場合は、一度に全ての位置検出手段10を稼動させてもよく、任意の位置や数の位置検出手段10を稼動させてもよい。さらに、図6に示すように、ステップS31において、運転者の手2の位置に対応しない位置検出手段10は停止しても良く、すべての位置検出手段10を稼動させたままの時よりもコスト的に有利となる。
【0053】
また、複数装置からなる位置検出手段10を用いた場合、運転者の手がステアリングホイール1のいずれかの位置にあることを検知できている場合に、検知できている位置以外に存在する位置検知手段10を停止させるまでの時間を1〜30秒以内に設定することもできる。このように、他の位置検出手段10の停止までに一定時間を持たせているのは位置検出後、脈波センサ20の動作制御(たとえば光量調整)の間に手が移動することを考慮したためである。
【0054】
また、規定の時間、位置検出を継続したが位置検出ができない場合において、位置検出手段を一旦停止し、再度位置検出手段10を稼動させるパターンを繰り返してもよい。なぜなら、車両の操舵によってステアリングホイール1に置かれた手の位置が絶えず変わっているからである。すなわち、運転中常に手が動いて脈波測定が不可能な状態であるとは考えにくく、位置検出手段10を停止した場合においても、一定の時間を置けば脈波測定が可能になる確率が高いと考えられる。たとえば、10〜180秒の間位置検出手段を一時停止するとよい。一時停止時間が、10秒以下では操舵の連続する状況では相変わらず位置検出が困難であり、180秒以上では脈波計測可能な時間が少ないからである。
【0055】
また、位置検出手段10で検知できる手が一方のみである場合が30〜180秒以上継続した場合において、残りの手の位置検出を開始、位置検出手段10を30〜180稼動させてもよく、稼動させなくても良い。通常の運転において、ギアチェンジやAV装置や空調機器の稼動、調整のとき、といった必要時以外に手をステアリングホイール1から手を離す時間が30〜180秒であるからである。一方の手のみで車両の運転をする運転者も存在するため、再度位置検出手段10を稼動させなくても良い。
【0056】
また、エンジンが稼動し、かつ、ブレーキが作動していない状態で、位置検出手段10によってステアリングホイール1上で手の位置を検出できず、その検出できない状態が1〜10秒以上継続した場合において、手の位置検出を開始すると共に、前記時間経過後でも手の位置が検出できない場合、警告を発しても良い。エンジンが稼動し、かつ、ブレーキが作動していない状態で、ステアリングホイール1のいずれの位置にも手が置かれていない状態は非常に危険な状態だからである。時間を1〜10秒としたのは1秒未満であれば実環境でありうると考えられ、10秒以上では何らかの事故に遭遇する可能性が高くなるからである。警告にいたる時間は適宜短くしたり、長くしたりしても良い。
【0057】
手2の位置の検出が完了すると、手2の位置の情報を選択手段30に送信し、位置検出手段10を停止し、次にステップS4に移行する。
【0058】
ステップS4においては、ステップS3で送信された手2の位置の情報に基づいて、その手2の位置に対応する発光素子21および受光素子22を選択する。選択した発光素子21および受光素子22の情報を制御手段40に送信し、次のステップS5に移行する。
【0059】
ステップS5おいては、ステップS4で送信された情報に基づいて、その選択された発光素子21および受光素子22を稼動させる。発光素子21の稼動において、受光素子22が出力する脈波データから脈拍が正常に算出できるように、発光素子21が出力する光量が調節される。受光素子22も同様に、脈拍が正常に算出できるような脈波データを出力できるように、受光素子22の感度が調整される。発光素子21および受光素子22の調整が完了したら、次のステップS6に移行する。
【0060】
ステップS6においては、稼動された発光素子21から手に向かって光が出力され、手の中を流れる動脈血中のヘモグロビンで光が反射され、その反射光を受光素子22が受け取り、脈波データとして計測される。しかし、もし手の位置が発光素子21の位置より移動している場合は、受光素子22は外部光を受け取り、ノイズを計測していることになり脈波データは計測していない。よって、受光素子22が計測したデータが脈波データかどうかをチェックするために、次のステップS7に移行する。
【0061】
ステップS7においては、受光素子22が出力する出力データが脈波データなのかノイズデータなのかを調べるために、基準のデータと比較される。もし、出力データが基準データ以上のシグナルの高さを有していれば、外部光の可能性が高い。また、発光素子21からパルス光が出力されていれば、受光素子22が出力する出力データもパルス状になるはずであるので、外部光によるノイズなのかがチェックできる。
【0062】
出力データが外部光によるものであると判断された場合は、運転者の手がステアリングホイール1上の別の位置に移動した、または、ステアリングホイール1から離れた事を意味するため、ステップS4で選択された発光素子21および受光素子22を停止し、ステップS2に移行される。
【0063】
出力データが、基準のデータと比較され、脈波データであると判断されると、脈拍算出手段50に脈波データが送信され、次のステップS8に移行する。
【0064】
ステップS8においては、脈波データに基づいて脈拍が算出される。
【0065】
ステップS9においては、十分な脈拍の情報が入手できたのかどうかが検討される。さらに、脈波データが必要な場合は、再度ステップS6に戻り、脈波が計測される。また、ある所定の時間ごとに脈拍を収集するような場合は、一定の期間発光素子21および受光素子22を停止しておき、必要になった際に発光素子21および受光素子22を稼動させてステップS6に戻ってもよい。十分な脈拍情報が得られた場合は、発光素子21および受光素子22が停止され、すべての手順が終了する。
【0066】
また、エンジンの稼動を停止した時点で、脈波測定および脈拍算出を停止しても良い。
【0067】
(位置検出手順(パッシブ型))
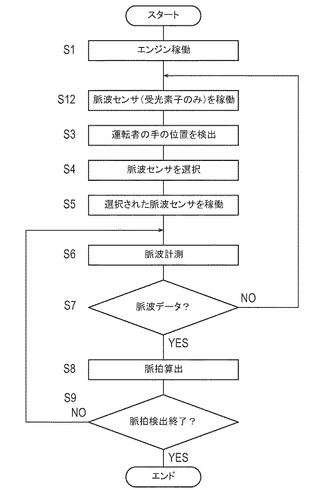
図7は、脈拍検出装置の位置検出手順の説明に供するフローチャートである。
【0068】
脈拍検出装置の位置検出手段10としてパッシブ型の脈波センサ20を使用した場合を説明する。
【0069】
全体の制御手順では、ステップS2において、位置検出手段を稼動させていたが、ステップS2の代わりに受光素子22を稼動(ステップS12)させる。稼動させる受光素子22の数、位置は外部光によって変えることが可能である。
【0070】
たとえば、太陽光などの車外の光で、ステアリングホイール1上に置かれた手の位置を十分に受光素子22が検出できるのならば、ステアリングホイール1上の運転者側の受光素子22を稼動させればよい。稼動させる受光素子22の数は、手の位置が検出できるほどの十分な数であればよい。しかし、車外の光だけでは、手の位置が検出されなければ車内灯やインパネ内のライトを点灯させ、点灯させた光源に向かう受光素子22を稼動させればよい。
【0071】
手の位置検出に最適な条件に受光素子22が稼動すると、ステアリングホイール1上に置かれた手の位置の検出が始まり、次のステップS3に移行する。次のステップS3以降は全体の制御手順と同様であるので省略する。
【0072】
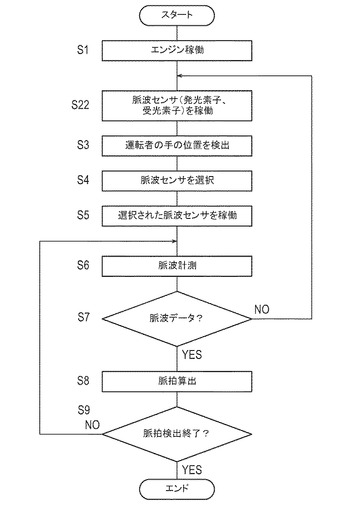
(位置検出手順(アクティブ型))
図8は、脈拍検出装置の位置検出手順の説明に供するフローチャートである。脈拍検出装置の位置検出手段10としてアクティブ型の脈波センサ20を使用した場合を説明する。
【0073】
位置検出手順(パッシブ型)では、ステップS12において、外部光を利用するために受光素子22を稼動させていたが、外部光を利用せずに発光素子21の光を利用するために発光素子21も同時に稼動させる(ステップS22)。稼動させる発光素子21および受光素子22の数、位置は同じであることが好ましい。また、運転者などに見えないインパネ側であるとさらに好ましい。
【0074】
発光素子21および受光素子22が稼動すると、ステアリングホイール1上に置かれた手の位置の検出が始まり、次のステップS3に移行する。次のステップS3以降は全体の制御手順と同様であるので省略する。
【0075】
以上、脈拍検出装置および脈拍検出装置の制御方法によれば、位置検出手段10で検出した運転者の手2の位置に対応する脈波センサ20を稼動させることができるので、脈拍測定の際に手の位置に対応しない発光素子21から光を出力させないようにできる。よって、手が置かれていない部分のステアリングホイール1は常時光らないため、運転者または同乗者にまぶしさや不快感を与えなくすることができる。また、脈拍測定の際に、全ての脈波センサ21の発光素子21および受光素子22を動作させなくてもよいため消費電力を抑制することができ、手の位置に対応する受光素子22だけの信号から脈拍を算出するので、脈拍算出時間も短縮することができる。
【0076】
(位置検出手順(パッシブ型+アクティブ型))
図9は、脈拍検出装置の位置検出手順の説明に供するフローチャートである。脈拍検出装置の位置検出手段10としてパッシブ型とアクティブ型の双方を利用した脈波センサ20を使用した場合を説明する。
【0077】
位置検出手順(パッシブ型+アクティブ型)では、ステアリングホイールの第2領域では外部光を利用するために受光素子22を稼動させ、ステアリングホイールの第1領域では外部光を利用せずに発光素子21の光を利用するために発光素子21も同時に稼動させる(ステップS33)。
【0078】
ステアリングホイール1の第1領域では発光素子21および受光素子22が稼動し手の位置の検出が始まり、第2領域では受光素子22のみが稼動し手の位置の検出が始まり、次のステップS3に移行する。次のステップS3以降は全体の制御手順と同様であるので省略する。
【0079】
以上、脈拍検出装置および脈拍検出装置の制御方法によれば、位置検出手段10で検出した運転者の手2の位置に対応する脈波センサ20を稼動させることができるので、脈拍測定の際に手の位置に対応しない発光素子21から光を出力させないようにできる。よって、手が置かれていない部分のステアリングホイール1は常時光らないため、運転者または同乗者にまぶしさや不快感を与えなくすることができる。また、脈拍測定の際に、全ての脈波センサ21の発光素子21および受光素子22を動作させなくてもよいため消費電力を抑制することができ、手の位置に対応する受光素子22だけの信号から脈拍を算出するので、脈拍算出時間も短縮することができる。
【0080】
[第2実施形態]
以上説明した第1実施形態では、位置検出手段10として脈波センサ20を用いて、受光素子22の出力信号で手の位置を判断している。このため、センサ光が必要である。センサ光としては、外光を利用したり、発光素子21から出力する光を利用したりできる。車内が暗い場合は、車内に備えられたライトを点灯させてもよい。
【0081】
本実施形態2は、センサ光を利用しない別の手段によって手の位置検出する形態である。位置検出手段10は、たとえば、感圧センサ、電気抵抗検出センサ、温感センサ、カメラ+画像処理装置、赤外線カメラ+表面温度解析装置、マイクロ波受発信装置、超音波受発信装置などである。位置検出手段10の種類によっては、脈波センサ20と共にステアリングホイール1に備えつけることもできる。その際、脈波センサ20と別の位置検出手段を併用してステアリングホイール1上の手2の位置を検出してもよい。
【0082】
位置検出手段10を脈波センサ20と共に備える場合は、1つの脈波センサ20に対して1つ設置したり、複数の脈波センサ20に対して1つ設置したりしてもよい。図10に示すように、位置検出手段10は脈波センサ20に隣接させて設置してもよく、脈波センサ20との対応が明確になり、後述する脈波センサ20の選択を簡潔に行うことができる。
【0083】
(感圧センサ)
本実施形態における位置検出手段10は感圧センサである。感圧センサは、手がステアリングに接触して圧力を生じたことをその感圧センサが検知して、その感圧センサ上に手が存在すると判断するものである。
【0084】
圧力を感知する感圧センサとしては、圧力の有無さえ感知できればよく、ステアリングホイール1に配置して、操舵に問題の無い大きさであれば、公知のものを利用できる。公知のものとしては、PVDFをセンサとして挙げることができる。或いは圧力がかかる事で離れた位置にある配線が接続して通電する、感圧スイッチもこの範疇にはいる。手がステアリングホイール1に触れたことによる圧力を感知して、圧力を感知した場所を手が触れた部位と判定し、その部位にある脈波検出手段を稼動させる。
【0085】
感圧センサは脈波センサ20と同様にステアリングホイール1に設置される。ステアリングホイール1上の運転者の手の位置を検出し、検出した手の位置に対応する脈波センサ20を選択するため、感圧センサは脈波センサ20に隣接して設置されていることが好ましい。ステアリングホイール1の芯金と脈波センサ20との間に設置することで、高精度で手の位置を検出でき、脈波センサ20の選択ミスを抑えることができる。
【0086】
感圧センサによって、検出された手の位置の情報は、第1実施形態と同様に選択手段30に送られ、手の位置検出は完了する。
【0087】
(電気抵抗検出センサ)
本実施形態における位置検出手段10は電気抵抗検出センサである。電気抵抗検出センサは、手がステアリングホイール1に接触することで電気抵抗が変化した部位が生じたことを、その電気抵抗検出センサが検知して、電気抵抗検出センサ上に手が存在すると判断するものである。
【0088】
電気抵抗を感知する電気抵抗検出センサとしては、電気抵抗の変化さえ感知できればよく、ステアリングホイール1に配置して、操舵に問題の無い大きさであれば、公知のものを利用できる。公知のものとしては、適当な電気抵抗を有する検出線をステアリングホイール1内に配置し、位置検出を行う際に微弱電流を検出線に流しておき、常時検出線に流れる電流を測定することができるセンサを挙げることができる。手がステアリングホイール1に触れたことにより、検出線の形状が変化するため、検出線の電気抵抗は変化し、検出線に流れる電流値も変化する。その電流値が変化した検出線の配置した場所を手が触れた部位と判定し、その部位にある脈波検出手段を稼動させる。
【0089】
電気抵抗検出センサは脈波センサ20と同様にステアリングホイール1に設置される。ステアリングホイール1上の運転者の手の位置を検出し、検出した手の位置に対応する脈波センサ20を選択するため、電気抵抗検出センサは脈波センサ20に隣接して設置されていることが好ましい。電気抵抗検出センサが検出線の場合、検出線をアレイ上にステアリングホイール1に配置することで、高精度で手の位置を検出でき、脈波センサ20の選択ミスを抑えることができる。
【0090】
電気抵抗検出センサによって、検出された手の位置の情報は、第1実施形態と同様に選択手段30に送られ、手の位置検出は完了する。
【0091】
(温感センサ)
本実施形態における位置検出手段10は温感センサである。温感センサは、手がステアリングホイール1に接触することで温度変化が生じ、接触部位にある温度センサが検知してそのセンサ上に手が存在すると判断するものである。
【0092】
温感センサとしては、温度変化を感知できればよく、ステアリングホイール1に配置して、操舵に問題の無い大きさであれば、公知のものを利用できる。
【0093】
温感センサは脈波センサ20と同様にステアリングホイール1に設置される。ステアリングホイール1上の運転者の手の位置を検出し、検出した手の位置に対応する脈波センサ20を選択するため、温感センサは脈波センサ20に隣接して設置されていることが好ましい。
【0094】
(カメラ+画像処理装置)
本実施形態における位置検出手段10はステアリングホイール1を映すカメラとカメラで得る情報から手の位置を判定する画像処理装置とである。カメラは、ステアリングホイール1を映し画像を取得し、手が置かれていない状態のステアリングホイール1を映した画像とカメラが映した画像とを比較して、画像内の異なる部分に手が存在すると判断するものである。
【0095】
カメラはステアリングホイール1とステアリングホイール1に置かれた手の位置を同時に映しえる位置に配置することが望ましく、ルーフやインパネやステアリングホイール1自体に設置が可能である。また、カメラでは手とステアリング以外に運転者の顔の表情も映してもよく、まぶたの状態から入眠予兆の推定を行なえる位置に設置されることが特に望ましい。
【0096】
カメラとしては、公知のデジタルカメラやデジタルビデオカメラなどが挙げられる。そのカメラで得る情報とは画像であり、外光を浴びて反射する光の強度が手とステアリングホイール1とで違うことから手の位置を判別するものである。
【0097】
その他のカメラとしては、公知の赤外線カメラが挙げられる。そのカメラで得る情報とは赤外線を利用した表面温度分布であり、手とステアリングとの温度の違いから手の位置を判別するものである。手とステアリングの熱放射を検知して、その温度差を推定する手法により、ステアリングに置かれた手の位置を推定するものである。
【0098】
(放射線受発信装置)
本実施形態における位置検出手段10は、放射線受発信装置である。放射線受発信装置は、ステアリングホイール1に向けて照射する放射線の発生源とその反射波を受信する受信器と、受信結果からどの位置に手があるかを判定する解析装置である。放射線は、赤外線、マイクロ波、超音波などが挙げられるが、運転者や同乗者が不快にならずかつ人体に影響のない波長、強度が好ましい。ルーフやインパネやステアリングホイール1自体に設置が可能である。
【図面の簡単な説明】
【0099】
【図1】第1実施形態の脈拍検出装置の説明に供する図である。
【図2】第1実施形態の脈波センサ20の設置位置の説明に供する図である。
【図3】パッシブ型とアクティブ型を用いた脈波センサ20のそれぞれの設置位置の説明に供する図である。
【図4】脈波データの一例を示すプロット図である。
【図5】脈拍検出装置全体の制御手順の説明に供するフローチャートである。
【図6】脈拍検出装置全体の制御手順の説明に供するフローチャートである。
【図7】脈拍検出装置の位置検出手順の説明に供するフローチャートである。
【図8】脈拍検出装置の位置検出手順の説明に供するフローチャートである。
【図9】脈拍検出装置の位置検出手順の説明に供するフローチャートである。
【図10】脈波センサ20と位置検出手段10との設置位置の説明に供する図である。
【符号の説明】
【0100】
1 ステアリングホイール、
2 運転者の手、
3 ECU、
10 位置検出手段、
20 脈波センサ、
30 選択手段、
40 制御手段、
50 脈拍算出手段。
【技術分野】
【0001】
本発明は、脈波検出装置、この脈波検出装置を設けた車両、および脈波検出装置の制御方法に関する。
【背景技術】
【0002】
発光素子と受光素子を備えた装置の一つに脈波センサがある。脈波センサは、発光素子としてLEDまたはレーザダイオードなどを備え、受光素子としてフォトトランジスタやフォトダイオードなどを備える。このような脈波センサは、車両のステアリングホイールに備えられ、運転者の手から検出した脈拍データと予め測定された基準脈拍データとを比較し、居眠り検出手段として使用されている。
【特許文献1】特開昭62−15129号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、脈拍測定のために脈波センサに備えられた発光素子は常時光を出力し続けており、ステアリングホイールに置かれた手の位置に対応する部分以外の発光素子も光を出力している。常時脈波センサを動作させ続けるためにエネルギー消費が多くなるという問題もあった。
【0004】
そこで本発明の目的は、ステアリングホイールに置かれた運転者の手の位置に対応する発光素子だけを動作させる脈拍検出装置および制御方法を提供することである。
【0005】
また、運転者の脈拍を計測することによって運転者の状態を判断できる脈拍検出装置を設けた車両を提供することである。
【課題を解決するための手段】
【0006】
上記目的を解決するための本発明に係る脈拍検出装置は、ステアリングホイールに置かれる運転者の手の位置を検出する位置検出手段と、少なくとも1つの発光素子および少なくとも1つの受光素子からなり、ステアリングホイールに配置される複数の脈波センサからなる。さらに、複数の脈波センサの中から位置検出手段によって検出された手の位置に対応する脈波センサを選択する選択手段と、選択された脈波センサの発光素子を発光させるとともに、選択された脈波センサの受光素子から出力信号を選択する制御手段とを有する。そして、選択された受光素子が出力する出力信号に基づいて、運転者の脈拍を算出する脈拍算出手段を有する。
【発明の効果】
【0007】
本発明に係る脈拍検出装置および脈拍検出装置の制御方法によれば、位置検出手段で検出した手の位置に対応する脈波センサを稼動させることができるので、脈拍測定の際に手の位置に対応しない発光素子から光を出力させないようにできる。脈拍測定の際に、全ての脈波センサの発光素子および受光素子を動作させなくてもよいため消費電力を抑制することができる。
【0008】
また、車両にこのような脈拍検出装置を搭載することで、運転者の脈拍を計測し、運転者の状態を判断することができる。
【発明を実施するための最良の形態】
【0009】
本発明の脈拍検出装置の好ましい実施形態を説明する。しかし、本発明の脈拍検出装置は以下の実施形態のみには制限されない。
【0010】
[第1実施形態]
図1は、本実施形態による脈拍検出装置の説明に供する図である。
【0011】
本実施形態に係る脈拍検出装置は、ステアリングホイール1に置かれる運転者の手2の脈拍を検出する装置であり、車両の動作を電子制御すべく搭載されたECU3(Electronic Control Unit:電子制御ユニット)を用いて行われる。運転者の脈拍の検出は、ステアリングホイール1に複数設置された脈波センサ20が収集した脈波をECU3で算出することで行われる。
【0012】
ECU3は、位置検出手段10、選択手段30、制御手段40、および脈拍算出手段50の機能を有する。また、ECU3は制御手段40としての機能によって、ステアリングホイール1に複数備えられた個々の脈波センサ20を動作させるか否かを制御し、脈波センサ20の発光素子21を発光させたり、受光した受光量に依存した出力信号を出力する受光素子22を作動させたりする。
【0013】
脈波センサ20の発光素子21および受光素子22を動作させるか否かの他にも、ECU3と脈波センサ20は、脈波センサ20の発光素子21および受光素子22を制御する制御信号や、受光素子22が出力する出力信号の送受信を行っている。ECU3は受光素子22の出力信号に基づいて、発光素子21や受光素子22の動作条件を決定し、その動作条件に基づいた制御信号を脈波センサ20に送り、発光素子21の出力する光の量や、受光素子22の受光感度などを調整する。
【0014】
また、ECU3はそれぞれの手段が要する情報を記憶するためのメモリを備えた記憶部、情報を送受信するための車内LAN通信手段を用いた送受信部を有する。記憶部、送受信部については、従来の装置や方式が採用されるため説明は省略する。
【0015】
ECU3を構成するそれぞれの手段は、車内のネットワークを通じて電子制御される。位置検出手段10ではステアリングホイール1上の手2の位置を検出し選択手段30にその検出した情報を送り、選択手段30では検出した手の位置情報に対応する脈波センサ20を選択し、選択手段30では選択された脈波センサ20の動作を制御し、脈拍算出手段50では脈波センサ20からの脈波データから脈拍を算出する。それぞれの手段について詳述する。
【0016】
[位置検出手段10]
位置検出手段10は、ステアリングホイール1上に置かれた手2の位置を検出する。
【0017】
位置検出手段10によって検出された手2の位置の情報は、脈波センサ20を選択する選択手段30に送られ、位置検出は完了する。選択手段30への情報の送信が完了すると、手2の位置の検出が再び開始されるまで、位置検出手段10は一旦停止されることが好ましい。
【0018】
手2の位置が検出されない場合は、検出されるまで位置検出手段10を稼動してもよく、ある一定の時間間隔をもって稼動させてもよい。もし、所定の回数以上検出されない場合は、位置検出手段20を停止させ、脈拍検出を中止してもよい。
【0019】
位置検出が完了した場合、一旦停止されることが好ましいが、ステアリングホイール1上の手2の位置が変わった際は、位置検出手段10が再度稼動され、手2の位置の検出が開始される。
【0020】
本実施形態1は、位置検出手段10として脈波センサ20用いた場合である。脈波センサ20を使用することによって、別の位置検出装置を備えないため、コスト的に有利となる。図2は、本実施形態による脈波センサ20の設置位置の説明に供する図である。図2に示すように、脈波センサ20はステアリングホイール1上に満遍なく複数配置することによって位置検出手段10として利用することができる。なお、第2実施形態において脈波センサ20以外の別の位置検出手段を使用した場合を説明する。
【0021】
位置検出手段10としての脈波センサ20の利用の仕方によって、パッシブ型、アクティブ型、パッシブ型+アクティブ型と区別する。以下詳細に説明する。
【0022】
(パッシブ型)
位置検出手段10として、脈波センサ20の受光素子22のみを用いる。受光素子22は、外部からの光を受光して受光量に依存した信号を出力する。脈波センサ20の受光素子22が光を受光したか否かを判断することによって、手2の位置を検出する。ステアリングホイール1外からの外光を光源とするので、パッシブ型と称する。外光はたとえば、車外から来る太陽光や街頭のライト、車内の車内灯やインパネからの光などである。
【0023】
ステアリングホイール1に置かれた手の位置を検出するために、所定の数の受光素子22を稼動させればよいが、全ての受光素子22を稼動させるのが好ましい。しかし、光源が車外からの太陽光や車内の室内灯等であればインパネ側の受光素子22を稼動させる必要はない。反対にインパネに設置されたライトが光源ならばインパネ側だけの受光素子22を稼動させてもよい。さらに、夜間など外光が利用できない環境のときは、運転者や同乗者が不愉快に思わないような光量、所定の時間、もしくはタイミングで車内に取り付けられたライトを稼動させてもよい。
【0024】
ステアリングホイール1に置かれた手の位置の検出は以下のようにして行われる。もし、ステアリングホイール1に設置された受光素子22上に手があると、手によって受光素子22に入る光が遮断されて受光量は外光と比較すると極端に減少する。よって、複数の受光素子22から出力されたそれぞれの信号を比較し、信号が小さい受光素子22を識別することによって、その受光素子22に対応する位置に手が置かれていることが判断できる。たとえば、出力された信号の大きさが他の信号の10%以下であれば、その信号を出力する受光素子22は遮光されていると判断することができる。
【0025】
(アクティブ型)
位置検出手段10として、脈波センサ20の発光素子21および受光素子22を用いる。受光素子22は、発光素子21が発光した光がステアリングホイール1上に置かれた手で反射された反射光を受光して受光量に依存した信号を出力する。脈波センサ20の受光素子22が反射光を受光したか否かを判断することによって、手2の位置を検出する。ステアリングホイール1から出力した光を光源とするので、アクティブ型と称する。
【0026】
ステアリングホイール1に置かれた手の位置を検出するために、全ての位置の脈波センサ20を作動させることができるが、全ての脈波センサ20を作動させるということは、ステアリングホイール1の手の位置以外の部分の発光素子21が光を出力することを意味する。手の位置以外の部分が光っているため、運転者または同乗者に対してまぶしさや不快感を与える可能性があるので、インパネ側だけの脈波センサ20を作動させた方が好ましい。
【0027】
ステアリングホイール1上に置かれた手の位置に対応する受光素子22は、発光素子21の光が手で反射した反射光を受光し、外光は手で遮断され受光されないため、出力する信号は発光素子21の発光した光量に依存する。よって、発光素子21が出力した光量に依存した信号を出力する受光素子22に対応する位置が、ステアリングホイール1上に置かれた手の位置となる。
【0028】
受光素子22は発光素子21による反射光もしくは外光を受光するので、反射光と外光とを区別するためにパルス光を使用するほうが望ましい。発光素子21からパルス光を出力することによって、受光素子22が出力する信号において、出力信号レベルが常に一定ならば外光であり、パルス状であって一定の周期で出力信号のレベルが変化しているならば、発光素子21の光が手で反射された反射光であることが判断できる。
【0029】
このように、脈波センサ20をアクティブ型として使用することによって、別の位置検出装置を備えないため、コスト的に有利となる。さらに、外光を利用できない状況においても脈波センサ20の発光素子21を光らせることで、位置の検出ができる。
【0030】
(パッシブ型+アクティブ型)
位置検出手段10として、上述したパッシブ型とアクティブ型の脈波センサ20を用いることができる。図3は、パッシブ型とアクティブ型を用いた脈波センサ20のそれぞれの設置位置の説明に供する図である。図3に示すように、ステアリングホイール1の中心線から下半分の領域がアクティブ型の脈波センサ20を位置検出手段10として利用する第1領域28であり、上半分の領域がパッシブ型の脈波センサ20を利用した第2領域29である。上下それぞれ分けることによって、車外の光を利用し、上半分では発光素子21から光を出さずに運転者の手の位置を検出することができ、コスト的に有利となる。中心線で分けずに任意の割合で第1領域28と第2領域29を分けてもよい。他にも、運転者に面したステアリングホイール1に設置された脈波センサ20をパッシブ型、運転者に面していない脈波センサ20をアクティブ型として使用してもよい。
【0031】
たとえば、外光を利用したパッシブ型で手の位置を検出できないときは、発光素子21の光を利用したアクティブ型で手の位置を検出するようにしてもよく、反対に外光が利用できるときはアクティブ型からパッシブ型にしてもよく、適宜パッシブ型とアクティブ型を切り替えてもよい。また、パッシブ型とアクティブ型の切り替えの判断として、車内に取り付けられた日射センサを使用してもよい。第1領域28と第2領域29を判断するために切り替えの判断と同じ制御方法を用いることができる。
【0032】
[脈波センサ20]
図2に示すように、脈波センサ20は、ステアリングホイール1に複数備えられ、ステアリングホイール1上に置かれた運転者の手2の脈波を測定する。脈波センサ20は後述する制御手段40によりその動作が制御される。脈波センサ20が測定した脈波データはECU3に送られ脈拍の算出が行われる。
【0033】
脈波センサ20はステアリングホイール1の運転者側およびインパネ側を含めた全体の任意の位置に満遍なく配置され、ステアリングホイール1上に貼り付けて設置してもよく、予めステアリングホイール1内に埋め込むように設置してもよい。なお、図2に示すように、手の位置と脈波センサ20の位置との対応を取りやすくするために、脈波センサ20をステアリングホイール1にアレイ状に配置してもよい。また、運転者の手が頻繁に置かれる場所に偏りをもたせて配置しても良い。
【0034】
発光素子21からの光による反射光だけを受光素子22で受光し、外光はノイズの原因となるので、外光を受光しないために、脈波センサ20の大きさは手の指先で十分に隠せるほど小さい方が好ましい。
【0035】
複数の脈波センサ20はそれぞれ独立して操作することが可能である。これにより、1つだけでなく複数の脈波を測定できるため、算出される脈拍の信頼性が向上する。
【0036】
脈波センサ20は、ステアリングホイール1外部に向かって発光する少なくとも1つ以上の発光素子21と、当該ステアリングホイール1外部からの光を受光し受光量に応じた信号を出力する少なくとも1つ以上の受光素子22とから構成される。以下、発光素子および受光素子について説明する。
【0037】
[発光素子21および受光素子22]
発光素子21は、ステアリングホイール1に備えられ、ステアリングホイール1外部に向かって光を出力するものであり、ステアリングホイール1に置かれた手の脈波を測定するためのセンサ光の発生器として機能する。受光素子22は、発光素子21とセットでステアリングホイール1に備えられ、ステアリングホイール1外部から入射した光を吸収して、吸収した光量に応じた信号を出力するものであり、脈波を測定するために発光素子21から発光されて手で反射されたセンサ光を受光する受光器として機能する。
【0038】
発光素子21は、たとえば、LEDまたはレーザダイオードなどである。受光素子22は、たとえば、フォトトランジスタやフォトダイオードなどである。
【0039】
脈波センサ20内に備えられる発光素子21および受光素子22は、それぞれ異なる大きさ、異なる数を有してもよい。発光素子21のLEDが小さく、発光する光量が十分でないなら脈波センサ20内に複数備えてもよい。受光素子22のフォトダイオードが小さく、十分な光量を受光することができないならば、脈波センサ20内に複数備えてもよい。
【0040】
[脈波測定]
発光素子21および受光素子22を用いた脈波測定について説明する。皮膚近傍に存在する毛細血管では血液中のヘモグロビン流量は脈波と有意な関係があるとされている。一定幅の血管においては血液送出時にはヘモグロビン流量が増大するので、ヘモグロビンが多いときは血液送出時、少ないときは非送出時といえる。ヘモグロビンは光を吸収する性質を有しており、ヘモグロビンが増加すれば、その分、吸収される光量も増加する。そこで、発光素子21から光を照射しその反射光を測定すると、ヘモグロビン増加に伴い吸収量が増え、反射光の量が減少することになる。従って、受光素子22で受光量を測定すればヘモグロビンの増減が検知でき、これに基づいて脈波を得ることができると共に、簡単な比例計算にて血圧値を算出することが可能となる。そのため、脈波の計測は一定の周期で連続的に行われることが望ましい。
【0041】
脈波データは血液送出時のヘモグロビン流量に依存しており、脈拍と共に増減を繰り返した時間変化分布をする。図4は、脈波データの一例を示すプロット図である。図の横軸は時間(1マス:1秒)を示しており、縦軸は脈波センサ20が出力した信号を示している。同時に2つの脈波センサ20がそれぞれ出力した出力信号(それぞれ1マス:200mV、100mV)が示されている。
【0042】
脈拍の測定は人体の血管内を流れる血液中のヘモグロビンの流量を検出して行われるため、発光素子21から出力されるセンサ光は、人体の血管まで届き、さらにヘモグロビンで反射され人体からそのセンサ光が射出されるような光量を有することが好ましい。さらに、ヘモグロビンが反射しやすい波長を有するセンサ光を出力できる発光素子21であればなお好ましい。同様に、受光素子22は血液中のヘモグロビンから反射されたセンサ光を吸収し、吸収した光量に応じた信号を出力するために、センサ光の波長に対し高感度で受光できるほうが好ましい。
【0043】
[選択手段30]
選択手段30は、位置検出手段から送られてきた手の位置の情報に基づいて、その情報に対応する位置に配置された脈波センサ20を選択する。選択された脈波センサ20の情報を制御手段40に送る。脈波センサ20の情報とは、たとえば、脈波センサ20の番号である。脈波センサ20の情報が送信されると、脈波センサ20の選択は完了する。
【0044】
[制御手段40]
制御手段40は、選択手段30から送られてきた脈波センサ20の位置情報に基づいて、脈波センサ20を作動させる。具体的には、発光素子21を作動させるために電圧を印加し、受光素子22を作動させるために電圧を印加する。印加する電圧の大きさによって、発光素子21では光量を調節することができ、受光素子22では感度や出力する信号の大きさ等を調整することができる。発光素子21および受光素子22の調整を行い脈拍の算出に最適な条件で脈波センサ20を作動させるため、制御手段40は脈波センサ20と連動していることが好ましい。
【0045】
たとえば、発信素子がLEDの場合、制御手段40からはパルス信号が送信され、発光素子21が稼動される。したがって、LEDはパルス発光する。
【0046】
[脈拍算出手段50]
脈波センサ20の発光素子21からは常時一定の量の光が出力されており、血液中を流れるヘモグロビンの量で反射される光の量も変化する。脈波センサ20の受光素子22は、受光量に依存した信号を出力するため、図4のようなプロットになる。出力信号の大きさが大きいということは、受光量に比例した反射光が多いことを意味し、つまり、血液中を流れるヘモグロビンの量が少ないということである。逆に、出力信号の大きさが小さいということは、光が多く吸収されるためヘモグロビンの量が多いということである。一定時間あたりのピーク数を計測することによって脈拍を算出することができる。
【0047】
[車両]
このように、本発明の脈拍検出装置は、車両内での運転者の脈拍を測定することによって、各種生体情報(疲労、ストレス、快適度等)を非侵襲、かつリアルタイムに判断することができる。特に、本発明の脈拍検出装置は脈波センサ20を選択して作動させるので、脈拍を低電圧かつ高精度に検出できる車両を提供することができる。
【0048】
[全体の制御手順]
図5は、脈拍検出装置全体の制御手順を示したフローチャートである。
【0049】
運転者が車両に搭乗しエンジンを稼動させてから、運転者の脈拍を常時繰り返し算出する手順が示されている。位置検出手段10として、脈波センサ20以外の装置も想定して動作手順を説明する。
【0050】
図5に示す如く、この処理が開始されると、まずステップS1にて車両のエンジンが稼動し、車両に備えられた手段の稼動が可能となり、次のステップS2に移行する。
【0051】
ステップS2においては、上述したような位置検出手段10が稼動する。位置検出手段10が稼動すると、ステアリングホイール1上に置かれた手の位置の検出が始まり、次のステップS3に移行する。
【0052】
ステップS3においては、位置検出手段10によって、ステアリングホイール1上に置かれた運転者の手2の位置が検出される。手2の位置が検出されなければ、所定の時間後に再度手の位置の検出が行われる。所定の時間は、脈拍を測定するために必要な時間であれば良い。複数からなる位置検出手段10の場合は、一度に全ての位置検出手段10を稼動させてもよく、任意の位置や数の位置検出手段10を稼動させてもよい。さらに、図6に示すように、ステップS31において、運転者の手2の位置に対応しない位置検出手段10は停止しても良く、すべての位置検出手段10を稼動させたままの時よりもコスト的に有利となる。
【0053】
また、複数装置からなる位置検出手段10を用いた場合、運転者の手がステアリングホイール1のいずれかの位置にあることを検知できている場合に、検知できている位置以外に存在する位置検知手段10を停止させるまでの時間を1〜30秒以内に設定することもできる。このように、他の位置検出手段10の停止までに一定時間を持たせているのは位置検出後、脈波センサ20の動作制御(たとえば光量調整)の間に手が移動することを考慮したためである。
【0054】
また、規定の時間、位置検出を継続したが位置検出ができない場合において、位置検出手段を一旦停止し、再度位置検出手段10を稼動させるパターンを繰り返してもよい。なぜなら、車両の操舵によってステアリングホイール1に置かれた手の位置が絶えず変わっているからである。すなわち、運転中常に手が動いて脈波測定が不可能な状態であるとは考えにくく、位置検出手段10を停止した場合においても、一定の時間を置けば脈波測定が可能になる確率が高いと考えられる。たとえば、10〜180秒の間位置検出手段を一時停止するとよい。一時停止時間が、10秒以下では操舵の連続する状況では相変わらず位置検出が困難であり、180秒以上では脈波計測可能な時間が少ないからである。
【0055】
また、位置検出手段10で検知できる手が一方のみである場合が30〜180秒以上継続した場合において、残りの手の位置検出を開始、位置検出手段10を30〜180稼動させてもよく、稼動させなくても良い。通常の運転において、ギアチェンジやAV装置や空調機器の稼動、調整のとき、といった必要時以外に手をステアリングホイール1から手を離す時間が30〜180秒であるからである。一方の手のみで車両の運転をする運転者も存在するため、再度位置検出手段10を稼動させなくても良い。
【0056】
また、エンジンが稼動し、かつ、ブレーキが作動していない状態で、位置検出手段10によってステアリングホイール1上で手の位置を検出できず、その検出できない状態が1〜10秒以上継続した場合において、手の位置検出を開始すると共に、前記時間経過後でも手の位置が検出できない場合、警告を発しても良い。エンジンが稼動し、かつ、ブレーキが作動していない状態で、ステアリングホイール1のいずれの位置にも手が置かれていない状態は非常に危険な状態だからである。時間を1〜10秒としたのは1秒未満であれば実環境でありうると考えられ、10秒以上では何らかの事故に遭遇する可能性が高くなるからである。警告にいたる時間は適宜短くしたり、長くしたりしても良い。
【0057】
手2の位置の検出が完了すると、手2の位置の情報を選択手段30に送信し、位置検出手段10を停止し、次にステップS4に移行する。
【0058】
ステップS4においては、ステップS3で送信された手2の位置の情報に基づいて、その手2の位置に対応する発光素子21および受光素子22を選択する。選択した発光素子21および受光素子22の情報を制御手段40に送信し、次のステップS5に移行する。
【0059】
ステップS5おいては、ステップS4で送信された情報に基づいて、その選択された発光素子21および受光素子22を稼動させる。発光素子21の稼動において、受光素子22が出力する脈波データから脈拍が正常に算出できるように、発光素子21が出力する光量が調節される。受光素子22も同様に、脈拍が正常に算出できるような脈波データを出力できるように、受光素子22の感度が調整される。発光素子21および受光素子22の調整が完了したら、次のステップS6に移行する。
【0060】
ステップS6においては、稼動された発光素子21から手に向かって光が出力され、手の中を流れる動脈血中のヘモグロビンで光が反射され、その反射光を受光素子22が受け取り、脈波データとして計測される。しかし、もし手の位置が発光素子21の位置より移動している場合は、受光素子22は外部光を受け取り、ノイズを計測していることになり脈波データは計測していない。よって、受光素子22が計測したデータが脈波データかどうかをチェックするために、次のステップS7に移行する。
【0061】
ステップS7においては、受光素子22が出力する出力データが脈波データなのかノイズデータなのかを調べるために、基準のデータと比較される。もし、出力データが基準データ以上のシグナルの高さを有していれば、外部光の可能性が高い。また、発光素子21からパルス光が出力されていれば、受光素子22が出力する出力データもパルス状になるはずであるので、外部光によるノイズなのかがチェックできる。
【0062】
出力データが外部光によるものであると判断された場合は、運転者の手がステアリングホイール1上の別の位置に移動した、または、ステアリングホイール1から離れた事を意味するため、ステップS4で選択された発光素子21および受光素子22を停止し、ステップS2に移行される。
【0063】
出力データが、基準のデータと比較され、脈波データであると判断されると、脈拍算出手段50に脈波データが送信され、次のステップS8に移行する。
【0064】
ステップS8においては、脈波データに基づいて脈拍が算出される。
【0065】
ステップS9においては、十分な脈拍の情報が入手できたのかどうかが検討される。さらに、脈波データが必要な場合は、再度ステップS6に戻り、脈波が計測される。また、ある所定の時間ごとに脈拍を収集するような場合は、一定の期間発光素子21および受光素子22を停止しておき、必要になった際に発光素子21および受光素子22を稼動させてステップS6に戻ってもよい。十分な脈拍情報が得られた場合は、発光素子21および受光素子22が停止され、すべての手順が終了する。
【0066】
また、エンジンの稼動を停止した時点で、脈波測定および脈拍算出を停止しても良い。
【0067】
(位置検出手順(パッシブ型))
図7は、脈拍検出装置の位置検出手順の説明に供するフローチャートである。
【0068】
脈拍検出装置の位置検出手段10としてパッシブ型の脈波センサ20を使用した場合を説明する。
【0069】
全体の制御手順では、ステップS2において、位置検出手段を稼動させていたが、ステップS2の代わりに受光素子22を稼動(ステップS12)させる。稼動させる受光素子22の数、位置は外部光によって変えることが可能である。
【0070】
たとえば、太陽光などの車外の光で、ステアリングホイール1上に置かれた手の位置を十分に受光素子22が検出できるのならば、ステアリングホイール1上の運転者側の受光素子22を稼動させればよい。稼動させる受光素子22の数は、手の位置が検出できるほどの十分な数であればよい。しかし、車外の光だけでは、手の位置が検出されなければ車内灯やインパネ内のライトを点灯させ、点灯させた光源に向かう受光素子22を稼動させればよい。
【0071】
手の位置検出に最適な条件に受光素子22が稼動すると、ステアリングホイール1上に置かれた手の位置の検出が始まり、次のステップS3に移行する。次のステップS3以降は全体の制御手順と同様であるので省略する。
【0072】
(位置検出手順(アクティブ型))
図8は、脈拍検出装置の位置検出手順の説明に供するフローチャートである。脈拍検出装置の位置検出手段10としてアクティブ型の脈波センサ20を使用した場合を説明する。
【0073】
位置検出手順(パッシブ型)では、ステップS12において、外部光を利用するために受光素子22を稼動させていたが、外部光を利用せずに発光素子21の光を利用するために発光素子21も同時に稼動させる(ステップS22)。稼動させる発光素子21および受光素子22の数、位置は同じであることが好ましい。また、運転者などに見えないインパネ側であるとさらに好ましい。
【0074】
発光素子21および受光素子22が稼動すると、ステアリングホイール1上に置かれた手の位置の検出が始まり、次のステップS3に移行する。次のステップS3以降は全体の制御手順と同様であるので省略する。
【0075】
以上、脈拍検出装置および脈拍検出装置の制御方法によれば、位置検出手段10で検出した運転者の手2の位置に対応する脈波センサ20を稼動させることができるので、脈拍測定の際に手の位置に対応しない発光素子21から光を出力させないようにできる。よって、手が置かれていない部分のステアリングホイール1は常時光らないため、運転者または同乗者にまぶしさや不快感を与えなくすることができる。また、脈拍測定の際に、全ての脈波センサ21の発光素子21および受光素子22を動作させなくてもよいため消費電力を抑制することができ、手の位置に対応する受光素子22だけの信号から脈拍を算出するので、脈拍算出時間も短縮することができる。
【0076】
(位置検出手順(パッシブ型+アクティブ型))
図9は、脈拍検出装置の位置検出手順の説明に供するフローチャートである。脈拍検出装置の位置検出手段10としてパッシブ型とアクティブ型の双方を利用した脈波センサ20を使用した場合を説明する。
【0077】
位置検出手順(パッシブ型+アクティブ型)では、ステアリングホイールの第2領域では外部光を利用するために受光素子22を稼動させ、ステアリングホイールの第1領域では外部光を利用せずに発光素子21の光を利用するために発光素子21も同時に稼動させる(ステップS33)。
【0078】
ステアリングホイール1の第1領域では発光素子21および受光素子22が稼動し手の位置の検出が始まり、第2領域では受光素子22のみが稼動し手の位置の検出が始まり、次のステップS3に移行する。次のステップS3以降は全体の制御手順と同様であるので省略する。
【0079】
以上、脈拍検出装置および脈拍検出装置の制御方法によれば、位置検出手段10で検出した運転者の手2の位置に対応する脈波センサ20を稼動させることができるので、脈拍測定の際に手の位置に対応しない発光素子21から光を出力させないようにできる。よって、手が置かれていない部分のステアリングホイール1は常時光らないため、運転者または同乗者にまぶしさや不快感を与えなくすることができる。また、脈拍測定の際に、全ての脈波センサ21の発光素子21および受光素子22を動作させなくてもよいため消費電力を抑制することができ、手の位置に対応する受光素子22だけの信号から脈拍を算出するので、脈拍算出時間も短縮することができる。
【0080】
[第2実施形態]
以上説明した第1実施形態では、位置検出手段10として脈波センサ20を用いて、受光素子22の出力信号で手の位置を判断している。このため、センサ光が必要である。センサ光としては、外光を利用したり、発光素子21から出力する光を利用したりできる。車内が暗い場合は、車内に備えられたライトを点灯させてもよい。
【0081】
本実施形態2は、センサ光を利用しない別の手段によって手の位置検出する形態である。位置検出手段10は、たとえば、感圧センサ、電気抵抗検出センサ、温感センサ、カメラ+画像処理装置、赤外線カメラ+表面温度解析装置、マイクロ波受発信装置、超音波受発信装置などである。位置検出手段10の種類によっては、脈波センサ20と共にステアリングホイール1に備えつけることもできる。その際、脈波センサ20と別の位置検出手段を併用してステアリングホイール1上の手2の位置を検出してもよい。
【0082】
位置検出手段10を脈波センサ20と共に備える場合は、1つの脈波センサ20に対して1つ設置したり、複数の脈波センサ20に対して1つ設置したりしてもよい。図10に示すように、位置検出手段10は脈波センサ20に隣接させて設置してもよく、脈波センサ20との対応が明確になり、後述する脈波センサ20の選択を簡潔に行うことができる。
【0083】
(感圧センサ)
本実施形態における位置検出手段10は感圧センサである。感圧センサは、手がステアリングに接触して圧力を生じたことをその感圧センサが検知して、その感圧センサ上に手が存在すると判断するものである。
【0084】
圧力を感知する感圧センサとしては、圧力の有無さえ感知できればよく、ステアリングホイール1に配置して、操舵に問題の無い大きさであれば、公知のものを利用できる。公知のものとしては、PVDFをセンサとして挙げることができる。或いは圧力がかかる事で離れた位置にある配線が接続して通電する、感圧スイッチもこの範疇にはいる。手がステアリングホイール1に触れたことによる圧力を感知して、圧力を感知した場所を手が触れた部位と判定し、その部位にある脈波検出手段を稼動させる。
【0085】
感圧センサは脈波センサ20と同様にステアリングホイール1に設置される。ステアリングホイール1上の運転者の手の位置を検出し、検出した手の位置に対応する脈波センサ20を選択するため、感圧センサは脈波センサ20に隣接して設置されていることが好ましい。ステアリングホイール1の芯金と脈波センサ20との間に設置することで、高精度で手の位置を検出でき、脈波センサ20の選択ミスを抑えることができる。
【0086】
感圧センサによって、検出された手の位置の情報は、第1実施形態と同様に選択手段30に送られ、手の位置検出は完了する。
【0087】
(電気抵抗検出センサ)
本実施形態における位置検出手段10は電気抵抗検出センサである。電気抵抗検出センサは、手がステアリングホイール1に接触することで電気抵抗が変化した部位が生じたことを、その電気抵抗検出センサが検知して、電気抵抗検出センサ上に手が存在すると判断するものである。
【0088】
電気抵抗を感知する電気抵抗検出センサとしては、電気抵抗の変化さえ感知できればよく、ステアリングホイール1に配置して、操舵に問題の無い大きさであれば、公知のものを利用できる。公知のものとしては、適当な電気抵抗を有する検出線をステアリングホイール1内に配置し、位置検出を行う際に微弱電流を検出線に流しておき、常時検出線に流れる電流を測定することができるセンサを挙げることができる。手がステアリングホイール1に触れたことにより、検出線の形状が変化するため、検出線の電気抵抗は変化し、検出線に流れる電流値も変化する。その電流値が変化した検出線の配置した場所を手が触れた部位と判定し、その部位にある脈波検出手段を稼動させる。
【0089】
電気抵抗検出センサは脈波センサ20と同様にステアリングホイール1に設置される。ステアリングホイール1上の運転者の手の位置を検出し、検出した手の位置に対応する脈波センサ20を選択するため、電気抵抗検出センサは脈波センサ20に隣接して設置されていることが好ましい。電気抵抗検出センサが検出線の場合、検出線をアレイ上にステアリングホイール1に配置することで、高精度で手の位置を検出でき、脈波センサ20の選択ミスを抑えることができる。
【0090】
電気抵抗検出センサによって、検出された手の位置の情報は、第1実施形態と同様に選択手段30に送られ、手の位置検出は完了する。
【0091】
(温感センサ)
本実施形態における位置検出手段10は温感センサである。温感センサは、手がステアリングホイール1に接触することで温度変化が生じ、接触部位にある温度センサが検知してそのセンサ上に手が存在すると判断するものである。
【0092】
温感センサとしては、温度変化を感知できればよく、ステアリングホイール1に配置して、操舵に問題の無い大きさであれば、公知のものを利用できる。
【0093】
温感センサは脈波センサ20と同様にステアリングホイール1に設置される。ステアリングホイール1上の運転者の手の位置を検出し、検出した手の位置に対応する脈波センサ20を選択するため、温感センサは脈波センサ20に隣接して設置されていることが好ましい。
【0094】
(カメラ+画像処理装置)
本実施形態における位置検出手段10はステアリングホイール1を映すカメラとカメラで得る情報から手の位置を判定する画像処理装置とである。カメラは、ステアリングホイール1を映し画像を取得し、手が置かれていない状態のステアリングホイール1を映した画像とカメラが映した画像とを比較して、画像内の異なる部分に手が存在すると判断するものである。
【0095】
カメラはステアリングホイール1とステアリングホイール1に置かれた手の位置を同時に映しえる位置に配置することが望ましく、ルーフやインパネやステアリングホイール1自体に設置が可能である。また、カメラでは手とステアリング以外に運転者の顔の表情も映してもよく、まぶたの状態から入眠予兆の推定を行なえる位置に設置されることが特に望ましい。
【0096】
カメラとしては、公知のデジタルカメラやデジタルビデオカメラなどが挙げられる。そのカメラで得る情報とは画像であり、外光を浴びて反射する光の強度が手とステアリングホイール1とで違うことから手の位置を判別するものである。
【0097】
その他のカメラとしては、公知の赤外線カメラが挙げられる。そのカメラで得る情報とは赤外線を利用した表面温度分布であり、手とステアリングとの温度の違いから手の位置を判別するものである。手とステアリングの熱放射を検知して、その温度差を推定する手法により、ステアリングに置かれた手の位置を推定するものである。
【0098】
(放射線受発信装置)
本実施形態における位置検出手段10は、放射線受発信装置である。放射線受発信装置は、ステアリングホイール1に向けて照射する放射線の発生源とその反射波を受信する受信器と、受信結果からどの位置に手があるかを判定する解析装置である。放射線は、赤外線、マイクロ波、超音波などが挙げられるが、運転者や同乗者が不快にならずかつ人体に影響のない波長、強度が好ましい。ルーフやインパネやステアリングホイール1自体に設置が可能である。
【図面の簡単な説明】
【0099】
【図1】第1実施形態の脈拍検出装置の説明に供する図である。
【図2】第1実施形態の脈波センサ20の設置位置の説明に供する図である。
【図3】パッシブ型とアクティブ型を用いた脈波センサ20のそれぞれの設置位置の説明に供する図である。
【図4】脈波データの一例を示すプロット図である。
【図5】脈拍検出装置全体の制御手順の説明に供するフローチャートである。
【図6】脈拍検出装置全体の制御手順の説明に供するフローチャートである。
【図7】脈拍検出装置の位置検出手順の説明に供するフローチャートである。
【図8】脈拍検出装置の位置検出手順の説明に供するフローチャートである。
【図9】脈拍検出装置の位置検出手順の説明に供するフローチャートである。
【図10】脈波センサ20と位置検出手段10との設置位置の説明に供する図である。
【符号の説明】
【0100】
1 ステアリングホイール、
2 運転者の手、
3 ECU、
10 位置検出手段、
20 脈波センサ、
30 選択手段、
40 制御手段、
50 脈拍算出手段。
【特許請求の範囲】
【請求項1】
ステアリングホイールに置かれる運転者の手の位置を検出する位置検出手段と、
少なくとも1つの発光素子および少なくとも1つの受光素子からなり、前記ステアリングホイールに配置される複数の脈波センサと、
前記複数の脈波センサの中から前記位置検出手段によって検出された前記手の位置に対応する脈波センサを選択する選択手段と、
前記選択された脈波センサの前記発光素子を発光させるとともに、当該選択された脈波センサの前記受光素子からの出力信号を選択する制御手段と、
前記選択された受光素子が出力する出力信号に基づいて、前記運転者の脈拍を算出する脈拍算出手段と、
を有することを特徴とする脈拍検出装置。
【請求項2】
前記位置検出手段は、前記脈波センサの前記受光素子を利用し、前記運転者の手が光を遮断することに起因して受光量が減少した前記受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出することを特徴とする請求項1に記載の脈拍検出装置。
【請求項3】
前記位置検出手段は、前記脈波センサを利用し、前記発光素子から発光され前記運転者の手によって反射されたことに起因した光を受光した前記受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出することを特徴とする請求項1に記載の脈拍検出装置。
【請求項4】
前記位置検出手段は、
前記ステアリングホイールの第1領域では、前記脈波センサを利用し、前記発光素子から発光され前記運転者の手によって反射されたことに起因した光を受光した前記受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出し、
前記ステアリングホイールの第2領域では、前記脈波センサの前記受光素子を利用し、前記運転者の手が光を遮断することに起因して受光量が減少した前記受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出することを特徴とする請求項1に記載の脈拍検出装置。
【請求項5】
前記ステアリングホイールの第1領域は、前記ステアリングホイールの中心線から下半分の領域であり、
前記ステアリングホイールの第2領域は、前記ステアリングホイールの中心線から上半分の領域であることを特徴とする請求項4に記載の脈拍検出装置。
【請求項6】
前記位置検出手段は、前記脈波センサに隣接して位置することを特徴とする請求項1に記載の脈拍検出装置。
【請求項7】
前記位置検出手段は、感圧センサ、電気抵抗検出センサ、または温感センサであることを特徴とする請求項6に記載の脈拍検出装置。
【請求項8】
請求項1から7のいずれか1項に記載の脈拍検出装置を設けたことを特徴とする車両。
【請求項9】
少なくとも1つの発光素子および少なくとも1つの受光素子からなる脈波センサが複数配置されているステアリングホイールに置かれた運転者の手の位置を検出する位置検出段階と、
前記複数の脈波センサの中から、前記位置検出段階で検出された前記手の位置に対応する脈波センサを選択する選択段階と、
前記選択された脈波センサの前記発光素子を作動させる発光段階と、
前記選択された脈波センサの前記受光素子が出力する出力信号に基づいて、前記運転者の脈拍を算出する脈拍算出段階と、
とからなることを特徴とする脈拍検出装置の制御方法。
【請求項10】
前記位置検出段階は、
前記受光素子が前記ステアリングホイール外からの光を受光する段階と、
前記前記運転者の手が光を遮断することに起因して受光量が減少した受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出する段階と、
を含むことを特徴とする請求項9に記載の脈拍検出装置の制御方法。
【請求項11】
前記位置検出段階は、
前記発光素子を発光させる段階と、
前記受光素子で受光する段階と、
前記受光素子が受光した光が前記発光素子から発光され前記運転者の手で反射された反射光であるのか否かを、前記受光素子の受光量の時間変化分布と前記発光素子が発光した発光量の時間変化分布とに基づいて、判断する反射光判断段階と、
前記反射光判断段階において前記受光素子が受光した光が前記反射光であると判断された場合、前記反射光を受光した前記受光素子の位置を前記ステアリングホイールに置かれた前記運転者の手の位置として検出する段階と、
を含むことを特徴とする請求項9に記載の脈拍検出装置の制御方法。
【請求項12】
前記位置検出段階は、
前記ステアリングホイールの第1領域に位置する前記発光素子を発光させる段階と、
前記受光素子で受光する段階と、
前記ステアリングホイールの第1領域に位置する前記受光素子を利用して、前記受光素子が受光した光が前記発光素子から発光され前記運転者の手で反射された反射光であるのか否かを、前記受光素子の受光量の時間変化分布と前記発光素子が発光した発光量の時間変化分布とに基づいて、判断する反射光判断段階と、
前記ステアリングホイールの第1領域に位置する前記受光素子を利用して、前記反射光判断段階において前記受光素子が受光した光が前記反射光であると判断された場合、前記反射光を受光した前記受光素子の位置を前記ステアリングホイールに置かれた前記運転者の手の位置として検出する段階と、
前記ステアリングホイールの第2領域に位置する前記受光素子を利用して、前記前記運転者の手が光を遮断することに起因して受光量が減少した受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出する段階と、
を含むことを特徴とする請求項9に記載の脈拍検出装置の制御方法。
【請求項13】
前記ステアリングホイールの第1領域は、前記ステアリングホイールの中心線から下半分の領域であり、
前記ステアリングホイールの第2領域は、前記ステアリングホイールの中心線から上半分の領域であることを特徴とする請求項12に記載の脈拍検出装置の制御方法。
【請求項14】
前記脈拍算出段階の前に、前記出力信号と予め用意された基準となるデータと比較し、前記出力信号が脈波に依存した脈波データであるか否かを判定する脈波判定段階をさらに含み、
前記脈波判定段階において前記出力信号が脈波データではないと判定された場合、前記位置検出段階に戻ることを特徴とする請求項9から13のいずれか1項に記載の脈拍検出装置の制御方法。
【請求項15】
前記位置検出段階は、
ステアリングホイールに置かれる運転者の手の位置を検出する複数の位置検出手段を用いて行われ、
前記運転者の手の位置を検出しなかった前記位置検出手段を停止する段階を含むことを特徴とする請求項9から14のいずれか1項に記載の脈拍検出装置の制御方法。
【請求項1】
ステアリングホイールに置かれる運転者の手の位置を検出する位置検出手段と、
少なくとも1つの発光素子および少なくとも1つの受光素子からなり、前記ステアリングホイールに配置される複数の脈波センサと、
前記複数の脈波センサの中から前記位置検出手段によって検出された前記手の位置に対応する脈波センサを選択する選択手段と、
前記選択された脈波センサの前記発光素子を発光させるとともに、当該選択された脈波センサの前記受光素子からの出力信号を選択する制御手段と、
前記選択された受光素子が出力する出力信号に基づいて、前記運転者の脈拍を算出する脈拍算出手段と、
を有することを特徴とする脈拍検出装置。
【請求項2】
前記位置検出手段は、前記脈波センサの前記受光素子を利用し、前記運転者の手が光を遮断することに起因して受光量が減少した前記受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出することを特徴とする請求項1に記載の脈拍検出装置。
【請求項3】
前記位置検出手段は、前記脈波センサを利用し、前記発光素子から発光され前記運転者の手によって反射されたことに起因した光を受光した前記受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出することを特徴とする請求項1に記載の脈拍検出装置。
【請求項4】
前記位置検出手段は、
前記ステアリングホイールの第1領域では、前記脈波センサを利用し、前記発光素子から発光され前記運転者の手によって反射されたことに起因した光を受光した前記受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出し、
前記ステアリングホイールの第2領域では、前記脈波センサの前記受光素子を利用し、前記運転者の手が光を遮断することに起因して受光量が減少した前記受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出することを特徴とする請求項1に記載の脈拍検出装置。
【請求項5】
前記ステアリングホイールの第1領域は、前記ステアリングホイールの中心線から下半分の領域であり、
前記ステアリングホイールの第2領域は、前記ステアリングホイールの中心線から上半分の領域であることを特徴とする請求項4に記載の脈拍検出装置。
【請求項6】
前記位置検出手段は、前記脈波センサに隣接して位置することを特徴とする請求項1に記載の脈拍検出装置。
【請求項7】
前記位置検出手段は、感圧センサ、電気抵抗検出センサ、または温感センサであることを特徴とする請求項6に記載の脈拍検出装置。
【請求項8】
請求項1から7のいずれか1項に記載の脈拍検出装置を設けたことを特徴とする車両。
【請求項9】
少なくとも1つの発光素子および少なくとも1つの受光素子からなる脈波センサが複数配置されているステアリングホイールに置かれた運転者の手の位置を検出する位置検出段階と、
前記複数の脈波センサの中から、前記位置検出段階で検出された前記手の位置に対応する脈波センサを選択する選択段階と、
前記選択された脈波センサの前記発光素子を作動させる発光段階と、
前記選択された脈波センサの前記受光素子が出力する出力信号に基づいて、前記運転者の脈拍を算出する脈拍算出段階と、
とからなることを特徴とする脈拍検出装置の制御方法。
【請求項10】
前記位置検出段階は、
前記受光素子が前記ステアリングホイール外からの光を受光する段階と、
前記前記運転者の手が光を遮断することに起因して受光量が減少した受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出する段階と、
を含むことを特徴とする請求項9に記載の脈拍検出装置の制御方法。
【請求項11】
前記位置検出段階は、
前記発光素子を発光させる段階と、
前記受光素子で受光する段階と、
前記受光素子が受光した光が前記発光素子から発光され前記運転者の手で反射された反射光であるのか否かを、前記受光素子の受光量の時間変化分布と前記発光素子が発光した発光量の時間変化分布とに基づいて、判断する反射光判断段階と、
前記反射光判断段階において前記受光素子が受光した光が前記反射光であると判断された場合、前記反射光を受光した前記受光素子の位置を前記ステアリングホイールに置かれた前記運転者の手の位置として検出する段階と、
を含むことを特徴とする請求項9に記載の脈拍検出装置の制御方法。
【請求項12】
前記位置検出段階は、
前記ステアリングホイールの第1領域に位置する前記発光素子を発光させる段階と、
前記受光素子で受光する段階と、
前記ステアリングホイールの第1領域に位置する前記受光素子を利用して、前記受光素子が受光した光が前記発光素子から発光され前記運転者の手で反射された反射光であるのか否かを、前記受光素子の受光量の時間変化分布と前記発光素子が発光した発光量の時間変化分布とに基づいて、判断する反射光判断段階と、
前記ステアリングホイールの第1領域に位置する前記受光素子を利用して、前記反射光判断段階において前記受光素子が受光した光が前記反射光であると判断された場合、前記反射光を受光した前記受光素子の位置を前記ステアリングホイールに置かれた前記運転者の手の位置として検出する段階と、
前記ステアリングホイールの第2領域に位置する前記受光素子を利用して、前記前記運転者の手が光を遮断することに起因して受光量が減少した受光素子の位置を、前記ステアリングホイールに置かれた前記運転者の手の位置として検出する段階と、
を含むことを特徴とする請求項9に記載の脈拍検出装置の制御方法。
【請求項13】
前記ステアリングホイールの第1領域は、前記ステアリングホイールの中心線から下半分の領域であり、
前記ステアリングホイールの第2領域は、前記ステアリングホイールの中心線から上半分の領域であることを特徴とする請求項12に記載の脈拍検出装置の制御方法。
【請求項14】
前記脈拍算出段階の前に、前記出力信号と予め用意された基準となるデータと比較し、前記出力信号が脈波に依存した脈波データであるか否かを判定する脈波判定段階をさらに含み、
前記脈波判定段階において前記出力信号が脈波データではないと判定された場合、前記位置検出段階に戻ることを特徴とする請求項9から13のいずれか1項に記載の脈拍検出装置の制御方法。
【請求項15】
前記位置検出段階は、
ステアリングホイールに置かれる運転者の手の位置を検出する複数の位置検出手段を用いて行われ、
前記運転者の手の位置を検出しなかった前記位置検出手段を停止する段階を含むことを特徴とする請求項9から14のいずれか1項に記載の脈拍検出装置の制御方法。
【図1】


【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図4】
【図2】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図4】
【公開番号】特開2010−88487(P2010−88487A)
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願番号】特願2008−258493(P2008−258493)
【出願日】平成20年10月3日(2008.10.3)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願日】平成20年10月3日(2008.10.3)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]