
脚式移動ロボット
【課題】 簡素な構造でありながら、着地時の衝撃を吸収でき、軽量化された足部を備えた脚式移動ロボットを提供する。
【解決手段】 脚式移動ロボットの足部17は、板バネ部S1,S2,S3,S4を備えている。板バネ部S1,S2,S3,S4は、それぞれ板バネであるバネ部62b1,62b2,62b3,62b4と、減衰機能を有する第一の中間部材と、滑り止めの機能を有する第一の足底部材64と、を備えており、床面に接地した際に、撓みつつロボットの自重を支持する。
【解決手段】 脚式移動ロボットの足部17は、板バネ部S1,S2,S3,S4を備えている。板バネ部S1,S2,S3,S4は、それぞれ板バネであるバネ部62b1,62b2,62b3,62b4と、減衰機能を有する第一の中間部材と、滑り止めの機能を有する第一の足底部材64と、を備えており、床面に接地した際に、撓みつつロボットの自重を支持する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、脚式移動ロボットに関する。
【背景技術】
【0002】
脚式移動ロボット、特に脚式移動ロボットの足部構造に関する技術として、例えば特許文献1に記載の技術が知られている。特許文献1に記載の脚式歩行ロボットの足部は、上から順に、床反力を検出する6軸力センサ(床反力検出器)と、衝撃吸収機能を有するゴムブッシュを備えたバネ機構体と、足底フレームと、足底プレートと、ソールと、から構成される。
6軸力センサは、バネ機構体を介して足底フレームに接続されており、着地時に6軸力センサに加わる衝撃、特に斜め方向に働く衝撃をゴムブッシュが変形することによって低減することができる構成となっている。
【特許文献1】特開2003−71776号公報(段落0040〜0046、図2)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1に記載の脚式歩行ロボットは、部品点数が多く、構造が複雑であるという問題を有している。
そして、前記した脚式歩行ロボットにおいては、移動のスピード(歩行、走行)を高めることが望まれている。脚式歩行ロボットが高速で移動する場合に、脚部に大きな慣性力が生じる。かかる慣性力を小さくするために、脚部の末端側、すなわち足部の軽量化が望まれている。
また、脚式歩行ロボットが高速で移動する場合には、接地時に足部に加わる床反力による衝撃力も大きくなることから、脚式歩行ロボットの足部はかかる衝撃力に耐えうる構造であることが望ましい。
【0004】
本発明は、前記した背景に鑑み創案されたものであり、簡素な構造でありながら、着地時の衝撃を吸収でき、軽量化された足部を備えた脚式移動ロボットを提供することを課題とする。
【課題を解決するための手段】
【0005】
前記課題を解決するため、本発明の請求項1に記載の脚式移動ロボットは、上体と、前記上体に第一の関節を介して連結された脚部と、前記脚部の端部に第二の関節を介して連結された足部と、を備えた脚式移動ロボットであって、前記足部は、床面に接地する接地領域を下端部に有する足平部を備え、前記足平部は、接地時に撓みつつ自重を支持する板バネ部を備えていることを特徴とする。
【0006】
本発明において「接地領域」とは、脚式移動ロボットの移動時に床面と接地する領域のことである。
本発明において「自重」とは、脚式移動ロボットの自重のことである。また、「撓みつつ自重を支持する」とは、一以上の板バネ部が弾性変形し、一以上の板バネ部の弾性力によってロボットの自重を支持することを意味する。
本発明において「足平部」とは、脚式移動ロボットの足部の下部構造であり、床面からの反作用力を受ける部分である。本発明では、足平部が一以上の板バネ部を備えていることで、接地時に一以上の板バネ部が撓みつつ自重を支持する。
【0007】
また、請求項2に記載の脚式移動ロボットは、請求項1に記載の脚式移動ロボットであって、前記足平部は、複数の前記接地領域を備えていることを特徴とする。
【0008】
本発明において「複数の接地領域」とは、複数に分割された接地領域のことであり、例えば、板バネ部を複数設け、各板バネ部に一個ずつの接地領域を形成することによって得られる。また、一個の板バネ部に対して複数の接地領域を形成することも可能である。
このように、複数の接地領域を備えることによって、脚式移動ロボットが静止した状態であっても足平部が脚式移動ロボットをバランスよく支持することが可能となる。
【0009】
また、請求項3に記載の脚式移動ロボットは、請求項2に記載の脚式移動ロボットであって、複数の前記接地領域は、前記第二の関節に対して前後にわかれて配置されていることを特徴とする。
【0010】
例えば、人間を模した2足移動ロボットでは、人間の歩行に模して、足平部の後側(踵部分)から着地して前側(爪先部分)で蹴り上げるような制御が行われる。請求項3の脚式移動ロボットは、接地領域が前側および後側に配置されているので、かかる制御が好適に行われる。また、脚式移動ロボットの前進移動時には、脚式移動ロボットの前後方向に脚式移動ロボットの荷重中心が移動し、また、その荷重中心を理想的な位置に移動させる制御が行われるので、請求項3の脚式移動ロボットは、前後の接地領域によって踏ん張り、脚式移動ロボットの荷重中心を前後方向に移動させる制御が可能となる。
【0011】
また、請求項4に記載の脚式移動ロボットは、請求項1から請求項3のいずれか一項に記載の脚式移動ロボットであって、前記接地領域の少なくとも一つは、前記第二の関節から離れるにつれて上に向かって反っていることを特徴とする。
【0012】
このように、接地領域の底面形状を、第二の関節から離れるにつれて上に向かって反る形状とすることで、足平部が床面に対して傾いた状態で接地する場合等でも、接地領域を好適に確保することができる。また、接地面積を大きくして床面との間の摩擦力を確保することができる。
【0013】
また、請求項5に記載の脚式移動ロボットは、請求項1から請求項4のいずれか一項に記載の脚式移動ロボットであって、前記足平部は、前記接地領域として、接地時に前記床面との間で摩擦抵抗を生じる第一足底部材を備えていることを特徴とする。
【0014】
このようにすることで、足平部が床面に対して滑りにくくなり、スリップを防止できる。また、脚式移動ロボットの脚部の力を床面に対して効率よく伝えることができる。
【0015】
また、請求項6に記載の脚式移動ロボットは、請求項5に記載の脚式移動ロボットであって、前記板バネ部と前記第一足底部材との間に、前記第一足底部材の接地時に前記板バネ部の振動を減衰させる第一中間部材を備えていることを特徴とする。
【0016】
このようにすることで、第一足底部材の接地時に生じる板バネ部の振動を第一中間部材によって減衰させることができ、板バネ部の振動に伴う脚式移動ロボットの姿勢の不安定化を防ぐことができる。
【0017】
また、請求項7に記載の脚式移動ロボットは、請求項6に記載の脚式移動ロボットであって、前記第一中間部材は、前記第一足底部材の接地時に前記第一足底部材の前記板バネ部に対する床面方向の変位を許容することを特徴とする。
【0018】
このようにすることで、板バネ部の撓みに伴う第一足底部材における接地位置のずれを抑えることができる。
【0019】
また、請求項8に記載の脚式移動ロボットは、請求項5から請求項7のいずれか一項に記載の脚式移動ロボットであって、前記足平部は、前記第一足底部材よりも上方に、接地時に前記床面との間で摩擦抵抗を生じる第二足底部材を備えていることを特徴とする。
【0020】
このようにすることで、階段等段差がある床面を移動する場合に、通常の接地領域に設けられた第一足底部材以外の部分が接地する場合であっても、第二足底部材が接地することによってスリップを防止できる。また、脚式移動ロボットの脚部の力を床面に対して効率よく伝えることができる。
【0021】
また、請求項9に記載の脚式移動ロボットは、請求項8に記載の脚式移動ロボットであって、前記板バネ部と前記第二足底部材との間に、前記第二足底部材の接地時に前記板バネ部の振動を減衰させる第二中間部材を備えていることを特徴とする。
【0022】
このようにすることで、第二足底部材の接地時に生じる板バネ部の振動を第二中間部材によって減衰させることができ、板バネ部の振動に伴う脚式移動ロボットの姿勢の不安定化を防ぐことができる。
【0023】
また、請求項10に記載の脚式移動ロボットは、請求項9に記載の脚式移動ロボットであって、前記第二中間部材は、前記第二足底部材の接地時に前記第二足底部材の前記板バネ部に対する床面方向の変位を許容することを特徴とする。
【0024】
このようにすることで、板バネ部の撓みに伴う第二足底部材における接地位置のずれを抑えることができる。
【0025】
また、請求項11に記載の脚式移動ロボットは、請求項1から請求項10のいずれか一項に記載の脚式移動ロボットであって、前記足平部は、基部と、前記基部から下方にのび、下端部側に接地領域が形成された複数の前記板バネ部と、を備えていることを特徴とする。
【0026】
このようにすることで、複数の板バネ部を有する足平部を、簡素な構造で得ることができる。板バネ部と基部とは、別体に構成されていてもよいが、一体成形することも可能である。特に板バネ部および基部を一体成形とすることによって、さらなる部品点数の削減、足部の構造の簡略化が可能となる。
【0027】
また、請求項12に記載の脚式移動ロボットは、請求項11に記載の脚式移動ロボットであって、前記板バネ部を4個備え、そのうち2個の前記板バネ部は前記基部から前方にのび、かつ残りの2個の前記板バネ部は前記基部から後方にのびており、4個の前記板バネ部および前記基部が略H字状をなしていることを特徴とする。
【0028】
ここでいう「略H字状」としては、前方・後方にそれぞれ設けられた一対の板バネ部が互いに平行であってもよく、先端部に向かってやや開くように設けられていてもよいことを意味している。
【0029】
例えば、人間を模した2足移動ロボットでは、人間の歩行に模して、足平部の後側(踵部分)から着地して前側(爪先部分)で蹴り上げるような制御が行われる。請求項12の脚式移動ロボットは、接地領域が前側および後側に配置されているので、かかる制御が好適に行われる。また、脚式移動ロボットの前進移動時には、脚式移動ロボットの前後方向に脚式移動ロボットの荷重中心が移動し、また、その荷重中心を理想的な位置に移動させる制御が行われるので、請求項12の脚式移動ロボットは、前後の接地領域によって踏ん張り、脚式移動ロボットの荷重中心を前後方向に移動させる制御が可能となる。また、一対の板バネ部が先端部に向かってやや開くように設けられている場合には、脚式移動ロボットが左右に傾いて荷重が左右方向へずれた場合であっても踏ん張りが効く。
【0030】
また、請求項13に記載の脚式移動ロボットは、請求項1から請求項12のいずれか一項に記載の脚式移動ロボットであって、前記板バネ部は、繊維で強化された複合部材から形成されていることを特徴とする。
【0031】
本発明における「繊維で強化された複合部材」の一例として、プラスチックを強化用繊維で強化した繊維強化プラスチック(FRP:Fiber Reinforced Plastic)が挙げられる。また、強化用繊維としては、炭素繊維、ガラス繊維、有機繊維、金属繊維等が好適に使用可能である。このように、板バネ部を「繊維で強化された複合部材」から形成することによって、板バネ部自身の軽量化が可能となる。
【0032】
また、請求項14に記載の脚式移動ロボットは、請求項1から請求項13のいずれか一項に記載の脚式移動ロボットであって、前記板バネ部は、弾性率の異なる複数の層からなることを特徴とする。
【0033】
このようにすることで、脚式移動ロボットの移動時等における板バネ部の振動を減衰させることができ、脚式移動ロボットの姿勢の安定化が可能である。
【0034】
また、請求項15に記載の脚式移動ロボットは、請求項1から請求項13のいずれか一項に記載の脚式移動ロボットであって、前記板バネ部は、多層化された板バネと、前記板バネ間に介設された粘性部材と、から構成されることを特徴とする。
【0035】
このようにすることで、脚式移動ロボットの移動時等における板バネ部の振動を減衰させることができ、脚式移動ロボットの姿勢の安定化が可能である。
【0036】
また、請求項16に記載の脚式移動ロボットは、請求項1から請求項15のいずれか一項に記載の脚式移動ロボットであって、前記板バネ部の振動を減衰させる減衰手段を備えていることを特徴とする。
【0037】
このようにすることで、脚式移動ロボットの移動時等における板バネ部の振動を減衰させることができ、脚式移動ロボットの姿勢の安定化が可能である。前記した第一中間部材および第二中間部材も、減衰手段の一例である。その他、液圧を利用したダンパ装置等を減衰手段として適用可能である。ダンパ装置等によれば、足平部が床面から離れた際に生じる板バネ部の振動も減衰させることが可能となる。
【0038】
また、請求項17に記載の脚式移動ロボットは、請求項1から請求項16のいずれか一項に記載の脚式移動ロボットであって、前記板バネ部が複数あり、2個の前記板バネ部を連結させる連結部を備えていることを特徴とする。
【0039】
このようにすることで、足平部のバネ特性、特に剛性を調整することが可能となる。この連結部は、板バネ部と一体成形されていてもよく、板バネ部と別体の連結部材を各板バネ部に取付・固定したものであってもよい。なお、この連結部の形状、設置場所、個数等は適宜変更可能である。
【0040】
また、請求項18に記載の脚式移動ロボットは、請求項1から請求項17のいずれか一項に記載の脚式移動ロボットであって、前記足部は、前記足平部を介して前記床面から作用する床反力を検出する床反力検出手段を備えていることを特徴とする。
【0041】
本発明において「床反力検出手段」とは、足平部を介して入力される床反力、詳しくは床反力の並進力および床反力のモーメントの少なくとも一方を検出するためのものであり、少なくとも1軸方向の並進力またはモーメント(例えば、床面に垂直な軸方向の力Fz)を検出可能であればよい。
このように足部に床反力検出手段を設けることによって、より接地領域に近い場所での検出が可能となり、床反力をより正確に検出することができる。
【0042】
また、請求項19に記載の脚式移動ロボットは、請求項18に記載の脚式移動ロボットであって、前記床反力検出手段は、ユニット化された床反力検出器であることを特徴とする。
【0043】
本発明において「ユニット化」とは、ひとつの筐体内に部品を組み込んだ構成のことをいう。つまり、床反力検出手段の部品を筐体内に組み込んだものが床反力検出器である。このように、ユニット化された床反力検出器を使用することで、足部の組み立てが容易となる。
【0044】
また、請求項20に記載の脚式移動ロボットは、請求項19に記載の脚式移動ロボットであって、前記足平部は、前記床反力検出器に対して固定されていることを特徴とする。
【0045】
このようにすることで、脚式移動ロボットの足部のさらなる軽量化、簡略化が可能となる。
【0046】
また、請求項21に記載の脚式移動ロボットは、請求項19または請求項20に記載の脚式移動ロボットであって、前記足平部は、複数の前記接地領域を備えており、前記第二の関節の中心は、平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に対してオフセットしており、前記床反力検出器の中心は、前記第二の関節よりも平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に近くなるように設けられていることを特徴とする。
【0047】
特許文献1に記載の脚式歩行ロボットにおいては、第二の関節の中心は平面視で接地領域に対してオフセットしており、かつ第二の関節の中心および床反力検出器の中心は平面視で同じ位置に設けられていた。請求項21においては、床反力検出器の中心を平面視で第二の関節の中心に対してオフセットし、複数の接地領域の最遠点までの距離が最小となる位置に近づけたので、検出される床反力の値を小さくすることができ、床反力検出器の小型化が可能となる。
【0048】
また、請求項22に記載の脚式移動ロボットは、請求項19または請求項20に記載の脚式移動ロボットであって、前記足平部は、複数の前記接地領域を備えており、前記床反力検出器は、平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に設けられていることを特徴とする。
【0049】
このように床反力検出器の位置を設定することによって、検出される床反力の値を小さくすることができ、床反力検出器の小型化が可能となる。また、入力される床反力の最大値を抑えることができるので床反力検出器が故障しにくくなる。なお、床反力検出器の筐体が前記した位置に設けられていればよく、筐体の一部が前記した位置に位置する範囲内で筐体の位置を変更可能である。特に、床反力検出器の小型化の観点から見ると、床反力検出器の中心が平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に設けられていることが望ましい。
【0050】
また、請求項23に記載の脚式移動ロボットは、請求項20に記載の脚式移動ロボットであって、前記床反力検出手段は、前記板バネ部の歪みを検出する歪み検出手段であることを特徴とする。
【0051】
本発明において「歪み検出手段」とは、板バネ部の歪みを検出するためのものであり、例えば、歪みゲージ、ピエゾ素子等を利用したものが挙げられる。板バネ部は、床反力を受けて撓む(歪む)ものであり、その歪み量は床反力と相関する。そのため、板バネ部の歪みを検出することによって、床反力を検出することができる。
このように、板バネ部の歪みを検出することによって床反力を検出する構成とすることで、さらに足部の構成を簡略化することが可能となる。
また、板バネ部の歪みを検出することによって、床面の状態を検知することが可能となる。
【発明の効果】
【0052】
本発明によれば、着地時の衝撃を吸収でき、足部が軽量化かつ簡略化された脚式移動ロボットを提供することができる。
【発明を実施するための最良の形態】
【0053】
以下、本発明の実施形態について、本発明の脚式移動ロボットの構成を自律移動可能な2足移動ロボットに適用した場合を例にとり、適宜図面を参照しながら説明する。同様の部分には同一符号を付し、重複する説明を省略する。なお、位置、方向等に関する表現は、2足移動ロボットの前後方向にX軸、左右方向にY軸、上下方向にZ軸をとり、2足移動ロボットが起立姿勢をとった状態を基準として説明する。
【0054】
<2足移動ロボットR>
まず、本発明の2足移動ロボットについて図1を参照して説明する。図1は、本発明に係る2足移動ロボットを示す側面図である。
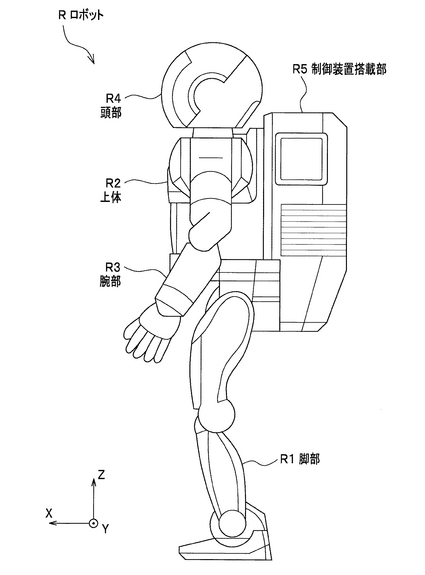
図1に示すように、2足移動ロボット(以下、単に「ロボット」ともいう)Rは、人間と同じように2本の脚部R1(1本のみ図示)により起立、移動(歩行、走行等)し、上体R2、2本の腕部R3(1本のみ図示)および頭部R4を有し、自律して移動するロボットである。そして、ロボットRは、これら脚部R1、上体R2、腕部R3および頭部R4の動作を制御する制御装置搭載部R5を背負う形で背中(上体R2の後方)に備えている。
【0055】
<脚部R1の関節構造>
続いて、ロボットRの脚部R1の関節構造について図2を参照して説明する。図2は、図1の脚部の関節構造を示す模式図である。
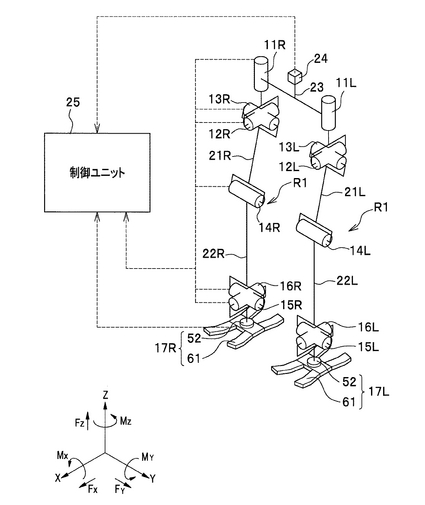
図2に示すように、ロボットRは、左右それぞれの脚部R1に6個の関節11R(L)〜16R(L)を備えている。左右12個の関節は、股部に設けられた脚回旋用(Z軸まわり)の股関節11R,11L(右側をR、左側をLとする。以下同じ。)、股部のロール軸(X軸)まわりの股関節12R,12L、股部のピッチ軸(Y軸)まわりの股関節13R,13L、膝部のピッチ軸(Y軸)まわりの膝関節14R,14L、足首のピッチ軸(Y軸)まわりの足首関節15R,15L、および、足首のロール軸(X軸)まわりの足首関節16R,16Lから構成されている。そして、脚部R1の下には足部17R,17Lが取り付けられている。
【0056】
すなわち、脚部R1は、股関節11R(L),12R(L),13R(L)、膝関節14R(L)および足首関節15R(L),16R(L)を備えている。股関節11R(L)〜13R(L)と膝関節14R(L)とは大腿リンク21R,21Lで、膝関節14R(L)と足首関節15R(L),16R(L)とは下腿リンク22R,22Lで連結されている。
なお、股関節11R(L)〜13R(L)が特許請求の範囲における「第一の関節」の一例であり、足首関節15R(L),16R(L)が特許請求の範囲における「第二の関節」の一例である。
【0057】
脚部R1は、股関節11R(L)〜13R(L)を介して上体R2に連結されている。図2では、脚部R1と上体R2との連結部を上体リンク23として簡略化して示す。また上体R2には、傾斜センサ24が設置されており、上体R2のZ軸(鉛直軸)方向に対する傾きおよび角速度を検出する。また、各関節を駆動する電動モータには、その回転量を検出するロータリエンコーダ(図示せず)が設けられる。
【0058】
このような構成により、脚部R1は左右の足について合計12の自由度を与えられ、歩行中にこれらの6*2=12個の関節を適宜な角度で駆動することで、足(脚部R1および足部17)全体に所望の動きを与えることができ、任意に3次元空間を歩行させることができる(この明細書で「*」は乗算を示す)。
【0059】
なお、図2に示すように、足首関節15R(L),16R(L)の下方には公知の6軸力センサ52が設けられ、ロボットRに作用する外力のうち、床面からロボットRに作用する床反力の3方向成分Fx,Fy,Fzとモーメントの3方向成分Mx,My,Mzとを検出する。これら6軸力センサ52、傾斜センサ24等が検出した床反力、モーメント、傾き、角速度等に関する信号が制御装置搭載部R5内に設けられた制御ユニット25に伝えられ、ロボットRの姿勢、動作等の制御に利用される。制御ユニット25は、メモリ(図示せず)に格納されたデータおよび入力された検出信号に基づいて関節駆動制御値を算出し、前記した関節を駆動する。
【0060】
<ロボットRの足部17>
ロボットRの足部17R(L)は、足首関節15R(L),16R(L)を介して脚部R1の端部(床面側)に取り付けられており、6軸力センサ52および足平部材61を備えている。左足(左の脚部R1および足部17L)と右足(右の脚部R1および足部17R)とは左右対称であるため、以下、必要のない場合にはR,Lを外して説明する。
【0061】
<第一の実施形態>
まず、本発明の第一の実施形態に係るロボットRの足部17について図3ないし図5を参照して説明する。図3は、本発明の第一の実施形態に係る2足移動ロボットの足部を示す正面図である。図4は、本発明の第一の実施形態に係る2足移動ロボットの足部を示す側面図である。図5は、本発明の第一の実施形態に係る2足移動ロボットの足部を示す底面図である。図3ないし図5の脚部R1および足部17は、図1に示すロボットRの外装部分を適宜取り除いた状態として示されている。なお、図3ないし図5には、ロボットRの左足(左の脚部R1および足部17L)が示されている。
【0062】
≪ロボットRの足首関節≫
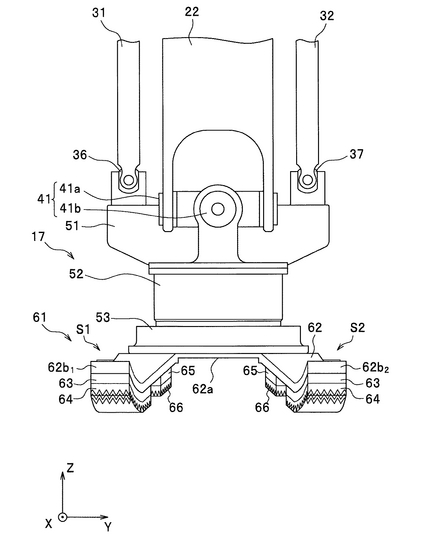
ここで、図3および図4を参照し、ロボットRの足首関節15,16について簡単に説明する。ロボットRの足首関節15,16は、十字軸41を下腿リンク22および足部17の第一台座部51に連結することによって構成されている。
十字軸41は、Y軸を回動軸線とする軸41aと、X軸を回動軸線とする軸41bとを十字状に組み合わせた部材である。軸41aの両端部は、下腿リンク22によって回動可能に支持されている。また、軸41bの両端部は、第一台座部51によって回動可能に支持されている。すなわち、軸41aが足首関節15に相当し、軸41bが足首関節16に相当する。
【0063】
また、下腿リンク22の斜め後ろには、第一ロッド31および第二ロッド32が設けられている。第一ロッド31は、下腿リンク22の右斜め後方に設けられており、十字軸36を介して第一台座部51と連結されている。第二ロッド32は、下腿リンク22の左斜め後方に設けられており、十字軸37を介して第一台座部51と連結されている。これら第一ロッド31および第二ロッド32は、その上方(例えば、下腿リンク22、大腿リンク21等)に設けられた電動モータの回転によって生じた駆動力が減速機を介して伝えられることによって上下方向に進退し、足首関節15,16を動かし、また所定角度に維持する構成となっている。
【0064】
例えば、足部17の爪先部分を浮かせたい場合には、第一ロッド31および第二ロッド32を下に進出させ、足部17の踵部分を浮かせたい場合には、第一ロッド31および第二ロッド32を上に退行させる。また、足部17の左右のいずれかを浮かせたい場合には、浮かせたい側のロッドを上に退行させ、他方のロッドを下に進出させる。かかる第一ロッド31および第二ロッド32の動作は、前記した制御ユニット25によって制御される。
【0065】
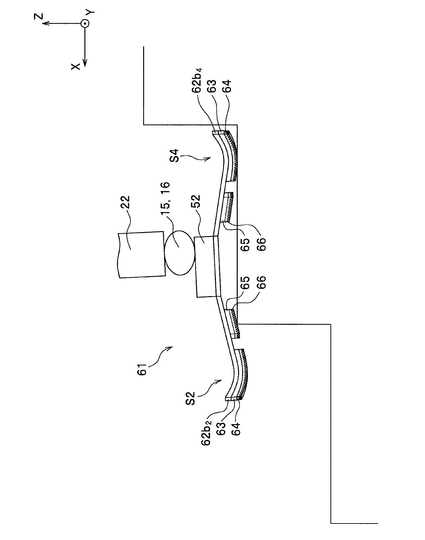
≪ロボットRの足部17≫
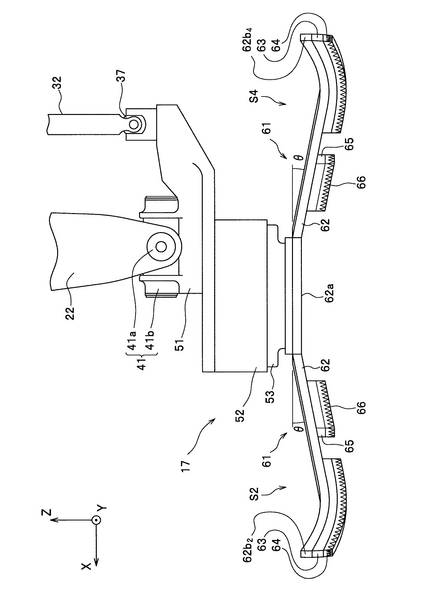
図3ないし図5に示すように、ロボットRの足部17は、上(足首関節側)から順に、第一台座部51と、6軸力センサ52と、第二台座部53と、足平部材61と、を備えている。
【0066】
第一台座部51は、足部17の上部に設けられた部材であり、足首関節15,16と連結される部材である。
【0067】
6軸力センサ52は、前記したように3方向の床反力並進力および3方向の床反力のモーメントを検出する装置であり、各部品が筐体内に収められている(ユニット化)。本実施形態において、第一台座部51と6軸力センサ52とは複数のボルト(図示せず)により固定されている。この6軸力センサ52の出力は、ハーネスを介して前記制御ユニット25に入力される。
この6軸力センサ52が特許請求の範囲における「床反力検出手段」の一例であり、また「床反力検出器」の一例でもある。
【0068】
第二台座部53は、6軸力センサ52の下方、すなわち6軸力センサ52と足平部材61との間に設けられた部材であり、6軸力センサ52と足平部材61とを互いに固定するための部材である。本実施形態において、6軸力センサ52と第二台座部53とは複数のボルト(図示せず)により固定され、第二台座部53と足平部材61とは複数のボルト(図示せず)により固定されている。このように、6軸力センサ52と足平部材61とを第二台座部53を介して固定する構成としたので、足部17の構造の簡略化、軽量化が達成される。なお、足部17の各部材の組付構造は前記したものに限定されない。
【0069】
足平部材61は、第二台座部53の下方に取り付けられた部材であり、床面と接地する足平部の主要部分を構成している。この足平部材61が特許請求の範囲における「足平部」の一例である。
この足平部材61は、板バネ本体62、第一中間部材63、第一足底部材64、第二中間部材65および第二足底部材66を備えている。
板バネ本体62は、撓みつつロボットRの自重を支持する部分であり、主に基部62aと、基部62aからのびるバネ部62bと、から構成される。本実施形態において、板バネ本体62は、バネ部62bの基端部が基部62aに連結された形状に一体成形された部材である。
基部62aは、平板形状を有しており、第二台座部53の底面に沿う形状を有している。後記するバネ部62bの基端部が、この基部62aに連結されており、バネ部62bは、基部62aとの連結部分を基端部とした板バネとして機能する。
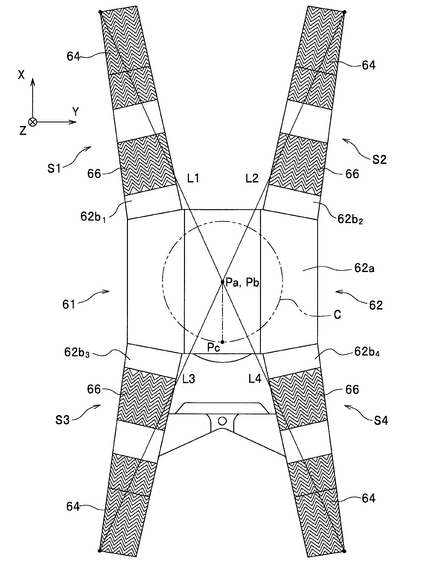
バネ部62bは、基部62aの端部から、角度θ(図4参照)で下向きにのびるバネ部分である。本実施形態では、4個のバネ部62b1,62b2,62b3,62b4があり、バネ部62b1,62b2は基部62aから前方(爪先方向)にのびており、バネ部62b3,62b4は基部62aから後方(踵方向)にのびている。これら各バネ部62b1,62b2,62b3,62b4は、同一形状、同一強度、同一性能(弾性率)とすることが望ましい。
角度θは、最大床反力Fzが作用した際に基部62aが床面に接地しない最小の角度に設定されていることが望ましい。ここでいう最大床反力Fzは、例えば、ロボットRが最高速度で走行し片足で接地した際に作用する反力である。かかる設定により、バネ部62b(62b1〜62b4)の弾性力によってロボットRの自重を支持しつつ、基部62aが接地して6軸力センサ52に悪影響を与えることを防ぐことができる。
【0070】
この板バネ本体62は、バネ部62bが板バネとして機能することが可能な素材であればよく、例えば、金属部材(鋼、アルミニウム合金、マグネシウム合金等)から形成されていてもよい。特に、繊維で強化された複合部材(繊維強化プラスチック等)から形成されている場合には、所望の強度や剛性を得つつ板バネ本体62の軽量化を図ることができる。この際、強化用繊維の繊維方向をバネ部62bの基端部から先端部へ向かう方向(長手方向)と一致させることによって、バネ部62bの強度を確保することができる。
また、各バネ部62bの繊維方向を変えることによって異方性を持たせ、各バネ部62bのバネ特性を変えることもできる。
強化用繊維としては、炭素繊維、ガラス繊維、有機繊維、金属繊維等が好適である。
この板バネ本体62は、一体成形された部材であることが望ましい。1個の基部62aに複数のバネ部62b(本実施形態では4個)が取り付けられた構成を有する板バネ本体62を一体成形することによって、さらなる部品点数の削減、および足部の構造の簡略化が可能となる。
【0071】
第一中間部材63は、バネ部62bの底面の接地領域に対応する部分、すなわち下端部側(本実施形態では先端部側と同一)に取り付けられた減衰部材であり、接地時に生じるバネ部62bの振動を減衰させる機能を有している。この中間部材63は特許請求の範囲における「減衰手段」の一例でもある。この第一中間部材63は減衰機能を備えた素材から形成されたものであればよく、例えば、発泡樹脂等から形成されたものが好適である。また、第一中間部材63の代わりの減衰手段として、液圧を利用したダンパ装置等を設置する構成であってもよい。このダンパ装置は、第一中間部材63と併用可能である。
【0072】
第一足底部材64は、第一中間部材63の底面に取り付けられた部材であり、足平部材61の下端部に位置し、移動時に実際に床面に接地する部材である。この第一足底部材64は、床面との間に発生する摩擦抵抗により滑り止めの機能を発揮する部材である。この第一足底部材64は滑り止め機能を備えた素材から形成されたものであればよく、例えば、ゴムから形成されたものが好適である。この第一足底部材64の底面が、特許請求の範囲における「接地領域」である。
【0073】
第二中間部材65は、バネ部62bの底面の中間部分に取り付けられた減衰部材であり、後記する第二足底部材66が接地した際に生じるバネ部62bの振動を減衰させる機能を有している。この第二中間部材65は第一中間部材63と同様に、減衰機能を備えた素材から形成されたものであればよく、例えば発泡樹脂等から形成されたものが好適である。
【0074】
第二足底部材66は、第二中間部材65の底面に取り付けられた部材であり、前記した第一足底部材64と同様に、床面との間に発生する摩擦抵抗により滑り止めの機能を発揮する部材である。この第二足底部材66は、第一足底部材64よりも上方に位置している。
【0075】
本実施形態において、4個の板バネ部S1,S2,S3,S4は、それぞれバネ部62bから構成されている。さらに詳しくは、板バネ部S1は、バネ部62b1から構成され、板バネ部S2は、バネ部62b2から構成され、板バネ部S3はバネ部62b3から構成され、板バネ部S4はバネ部62b4から構成されている。そして各板バネ部S1,S2,S3,S4の先端に設けられた第一足底部材64が接地した際には、これら各板バネ部S1,S2,S3,S4が弾性変形しつつ、弾性変形した状態の各板バネ部S1,S2,S3,S4によってロボットRの自重、詳しくはロボットRのバネ部62bよりも上部の構造による荷重全体を支持する構成となっている。そのため、簡易な構成でありながらロボットRの自重を支持し、さらに床反力による衝撃を吸収することができる。また、衝撃吸収能を高めることによって、ロボットRの移動(歩行、走行)速度を高めることが可能となる。
【0076】
また、ゴムブッシュ等が不要となり、足部17の軽量化が可能となる。かかる軽量化により、脚部R1にかかる慣性力が小さくなるので、高速移動に適した構造となる。
【0077】
また、各板バネ部S1,S2,S3,S4および基部62aは、平面視略H字状に配置されている。かかる構成により、接地領域が前側および後側に2箇所ずつ配置され、かつそれぞれ前後にのびるように配置された各板バネ部S1,S2,S3,S4のバネ特性が前後方向の荷重制御に適しているので、かかる足平構造は、2足移動の制御や、前後の接地領域によって踏ん張り、ロボットRの荷重中心を前後方向に移動させる制御に適している。また、板バネ部S1,S2および板バネ部S3,S4の各組が先端部に向かってやや開くように設けられているので、ロボットRが左右に傾いて荷重が左右方向へずれた場合であっても踏ん張りが効く。
【0078】
また、床面形状に凹凸がある場合等には、各板バネ部S1〜S4のうちのいずれかが浮いた(接地していない)状態となることが考えられる。このような場合には、板バネ部S1〜S4の曲げバネ特性(ロール剛性、ピッチ剛性)が非線形的に変化してしまう。そのため、制御ユニット25は、6軸力センサ52からの信号等に基づいて、全ての板バネ部S1〜S4が接地して撓むように目標足平位置姿勢を修正し、ロボットRが目標床反力を発生させるような姿勢をとるように制御している。かかる目標足平位置姿勢の修正量は、6軸力センサ52の検出値から推測した板バネ部の浮き具合に応じて非線形演算で算出される。
【0079】
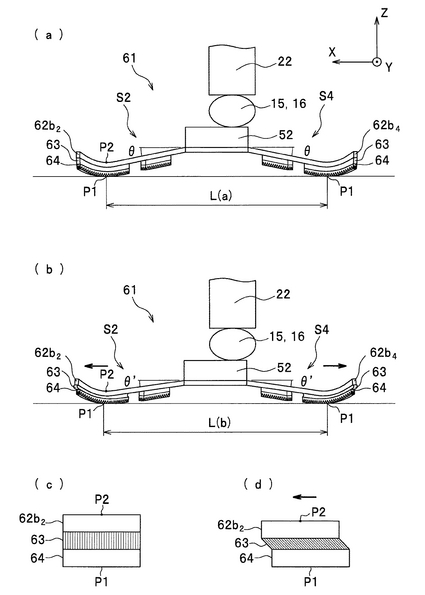
ここで、ロボットRの足部17を真下に下ろして接地させる場合について図6を参照して説明する。図6は、第一の実施形態に係る2足移動ロボットの足部の接地状態の例を示す模式図であり、(a)は接地初期を示す図、(b)はロボット自重が加わった状態を示す図、(c)は(a)の要部拡大模式図、(d)は(b)の要部拡大模式図である。
まず、図6(a)に示すように、各板バネ部S1,S2,S3,S4(うちS2,S4のみ図示)の先端に設けられた第一足底部材64(接地領域)が均等に接地する。さらに各板バネ部S1〜S4に荷重が加わると、各バネ部62bに床反力が作用してバネ部62bが撓む。この際、バネ部62bの角度がθ’(θ’<θ)となり、接地領域の上側となるバネ部62bの点P2が、接地領域の点P1に対して外側にずれる(図6(c)、(d)参照)。つまり、板バネ部S2,S4の底面側の接地点P1,P1間の距離が、L(a)からL(b)へと広がる(L(b)>L(a))。ここで角度θが大きいと、このずれも大きくなるので、前記したような範囲で角度θを小さく設定することが望ましい。また、第一中間部材63は、第一足底部材64のバネ部62bに対する床面方向の変位も許容するので、図6(b)に示すように、バネ部62bの撓みに伴う接地領域の床面に対する滑りを抑えることが可能となる。したがって、かかる滑りによる反力およびモーメントが6軸力センサ52に入力されて、ロボットRの姿勢の制御の障害となることを抑えることができる。また、第一中間部材63の素材や厚さを変更することによって、滑りの許容量や減衰能を適宜設定することができる。
【0080】
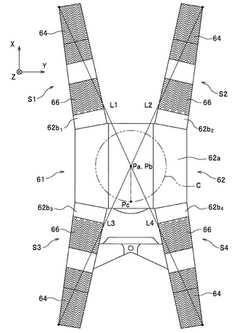
ここで、図5を参照して、接地領域の最遠点までの距離が最小となる位置Paと、6軸力センサの中心Pbと、足首関節の中心Pcとの関係について説明する。
本実施形態において、6軸力センサの中心Pb(ここでは、6軸力センサ52のZ軸方向感度中心と一致する。)は、ロボットRの起立静止状態において板バネ部S1〜S4の底面側に設けられた接地領域のうち、平面視(図5では底面視)での最遠点までの距離が最小となる位置(接地領域の中心ともいう。)Pa(以下、単に「位置Pa」と記載する。)の上方に設けられている。本実施形態では、各板バネ部S1,S2,S3,S4の底面の接地領域それぞれの最遠点までの距離L1,L2,L3,L4が等しくなっている。
かかる構成によると、移動時に6軸力センサ52に作用する荷重の最大値を抑えることができ、6軸力センサ52の小型化が可能である。また、6軸力センサ52を足部17に設け、接地領域に近づけたことにより、床反力およびモーメントのより正確な測定が可能となる。
【0081】
なお、接地領域が正多角形状に配置されている場合には、各接地領域から6軸力センサ52までの距離が等しくなるように配置することになる。また、6軸力センサ52に変えて、少なくとも1軸の床反力またはモーメント(例えば、Z軸方向の床反力の並進力Fz)を検出する床反力検出器を用いる構成であってもよい。
【0082】
また、本実施形態において、足首関節の中心Pcは、平面視で位置Paに対してオフセットしている。ここでは、軸41aおよび軸41b(図3参照)の交点が足首関節の中心Pcに相当する。この足首関節の中心Pcは、位置PaよりもロボットRの後方に設けられている。このように足首関節15,16が足平部材61の接地領域に対して後方にオフセットしている理由については後記する。
なお、足首関節の中心Pcは、さらに足平部材61の接地領域の内側(ロボットRの中心側)にもオフセットしている構成であってもよい。足首関節の中心Pcを内側にオフセットすることにより、隣接する足部17R,17Lの足平部材61同士の干渉を防ぎ、かつ接地面積を確保してロボットRの姿勢の安定性を維持することができる。
【0083】
また、本実施形態において、6軸力センサの中心Pbが位置Pa上に設けられるようにしたが、6軸力センサの中心Pbは、少なくとも平面視で足首関節の中心Pcよりも位置Paに近くなるように設けられていればよい。言い換えると、6軸力センサの中心Pbは、平面視で位置Paを中心とし、位置Pa、足首関節の中心Pc間の長さを半径とする円Cの内部にあればよい。例えば、位置Pa、足首関節の中心Pcを結ぶ線分上に6軸力センサの中心Pbが位置する構成であってもよい。かかる構成であっても、移動時に6軸力センサ52に作用する荷重の最大値を抑えることができ、6軸力センサ52の小型化が可能である。特に、6軸力センサの中心Pbが位置Pa上にある場合には、6軸力センサ52の小型化という効果を最大に発揮することができる。
【0084】
また、図4に示すように、板バネ部S1〜S4の下端部(先端部)は、足首関節15,16から離れるにつれて上に向かって反る形状を有しており、その底面に設けられた第一足底部材64も同様の形状を有している。これは、かかるロボットRの歩行の制御が、踵部分から接地して爪先部分で蹴り上げるようになっているため、接地時および蹴り上げ時に接地する面積を大きくし、床面との間の摩擦力を確保することを可能とするためである。また、接地領域を面で確保できるので、ロボットRの姿勢の安定化にもつながる。
【0085】
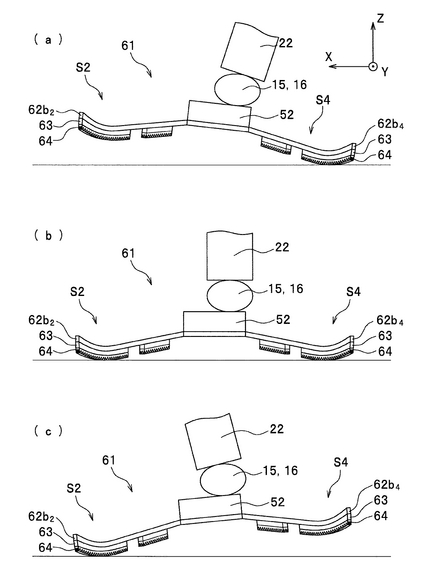
ここで、ロボットRの前進移動(歩行)時における板バネ部S1〜S4の接地状態の変化について図7を参照して説明する。図7は、第一の実施形態に係る2足移動ロボットの前進移動(歩行)時における足平部の接地状態の変化を説明する模式図である。
まず、宙に浮いた足平部材61を着地させる場合には、踵部分の板バネ部S3,S4に設けられた第一足底部材64(接地領域)から接地させる(図7(a))。そして全ての板バネ部S1〜S4の接地領域の全体が接地する(図7(b))。そして、踵部分の板バネ部S3,S4の接地領域を浮かせて、爪先部分の板バネ部S1,S2の接地領域だけで接地し、蹴り上げることによって全ての板バネ部S1〜S4の接地領域を浮かせる(図7(c))。かかる動作を左右の脚部R1に行わせることによって、ロボットRが前進移動する。このように、板バネ部S1〜S4の下端部(先端部)が上に向かって反っているので、着地時(図7(a))や蹴り上げ時(図7(c))のように足部17が床面に対して斜めになっても接地領域を好適に確保することが可能となる。なお、かかる反りは、ロボットRの進行方向において足首関節15,16から離れるにつれて板バネ部62bが上に向かって反るように設定されているのが好ましく、各板バネ部の先端部の反り具合は適宜変更可能である。また、接地領域の少なくとも一つが反っていればよく、接地領域の全てが反っている構成であってもよい。
【0086】
続いて、ロボットRが段差のある床面を移動する場合について説明する。図8は、第一の実施形態に係る2足移動ロボットが段差のある床面を移動する場合を説明する模式図である。
図8に示すように、床面に段差がある場所を移動する場合には、バネ部62b(62b2,62b4を図示)の第一足底部材64が設けられていない部分が接地するおそれがある。しかし、バネ部62bの中間部分に第二足底部材66を設けているので、このような場合であっても第二足底部材66が接地し、バネ部62b、すなわち板バネ部が直接接地することによる不具合(滑りの発生等)を解消することができる。
【0087】
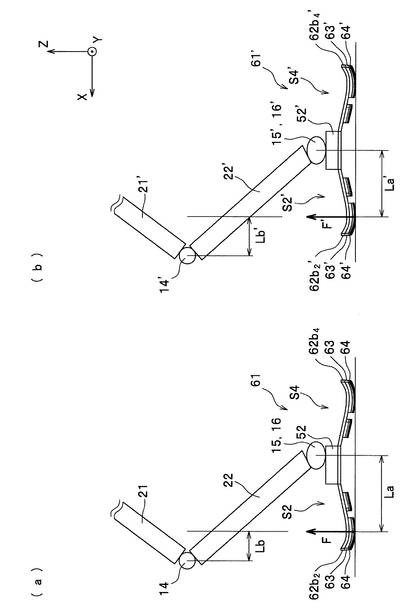
続いて、足首関節15,16が足平部材61の接地領域の後方にオフセットしている理由について、ロボットRが高速移動(走行)する場合を例にとり説明する。図9は、第一の実施形態に係る2足移動ロボットが高速移動する場合を説明する模式図であり、(a)は足首関節が足平部に対して後方にオフセットしている図、(b)は足首関節が足平部の前後方向中心に位置している図である。なお、図9(b)において、図9(a)と同様の部分には「’」を付加した符号を用いる。
図9(a)に示すように、足首関節15,16は、足平部材61に対して後方にオフセット(偏倚)している。この場合には、足首関節15’,16’から足平部材61の接地部分の前方先端までの距離Laが長くなる(La>La’)。ロボットRが高速移動(走行)する場合には、膝関節14を深く折り曲げ、足平部材61の爪先部分に床反力Fが集中する状態が生じる。このとき、膝関節14に生じるモーメントは、F*Lbとなる。一方、図9(b)に示すように、足首関節15’,16’が、足平部材61’の前後方向中心に位置している場合に膝関節14’に生じるモーメントは、F’*Lb’となる。ここで、Lb<Lb’であるので、F=F’とするとF*Lb<F’*Lb’が成立する。これは、高速移動時に膝関節14を駆動(屈曲)した場合において、足首関節15,16を足平部材61に対して、膝関節14の足平部材61に対する相対移動方向(本実施形態では前方)と反対方向(本実施形態では後方)にオフセットさせた場合に成立する。そして、足首関節15,16の足平部材61に対する後方へのオフセット量を大きくすると、高速移動時における膝関節14にかかる負担をより抑えることができることを意味している。
【0088】
<第二の実施形態>
続いて本発明の第二の実施形態に係るロボットRの足部について、第一の実施形態との相違点を中心に説明する。
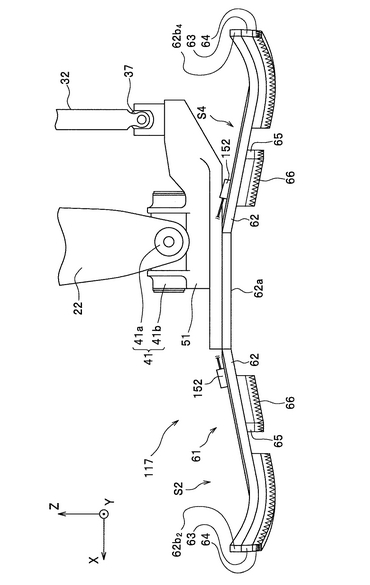
図10は、本発明の第二の実施形態に係る2足移動ロボットの足部を示す側面図である。図10に示すように、第二の実施形態に係る足部117は、6軸力センサ52の代わりに歪み検出手段152を備えている。そして、第一台座部51と板バネ手段61とが複数のボルト(図示せず)により固定されている。
歪み検出手段152は、板バネ部の歪み、詳しくはバネ部62bの歪みを検出するものである。板バネ部の歪みは板バネ部に入力される床反力と相関するので、板バネ部の歪み量を検出することによって床反力を検出することができる。検出された歪み量は、ハーネスを介して制御ユニット25に伝えられ、ロボットRの姿勢、移動等の制御に使用される。かかる歪み検出手段152としては、各バネ部62bに取り付けられた1以上の歪みゲージまたはピエゾ素子が好適である。
かかる歪み検出手段152が検出する床反力は、少なくとも1軸(例えば、Z軸方向の床反力Fz)であればよく、前記した6軸力センサ52と同様に6軸であることが望ましい。
【0089】
このように歪み検出手段152を設けることにより、床反力検出器52を省略することが可能となり、足部17のさらなる軽量化が可能となる。また、板バネ部S1〜S4の歪みを検出することによって、床面の形状を検知することができる。
【0090】
<第三の実施形態>
続いて、本発明の第三の実施形態に係るロボットRの足部について、第一の実施形態との相違点を中心に説明する。
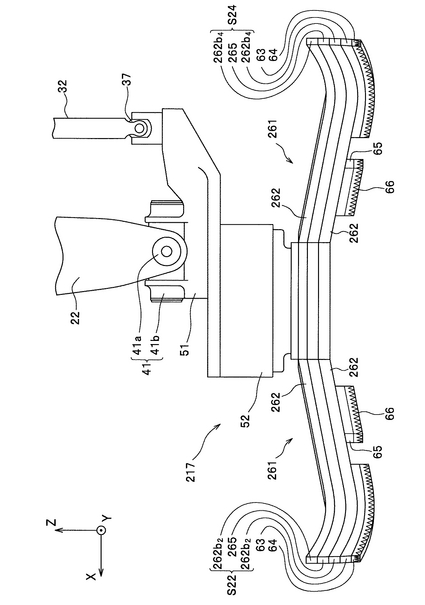
図11は、本発明の第三の実施形態に係る2足移動ロボットの足部を示す側面図である。図11に示すように、第三の実施形態に係る足部217は、足平部材61の代わりに多層化された足平部材261を備えている。
【0091】
足平部材261は、多層化された複数の板バネ本体262,262と、これら板バネ本体262,262間に介設された粘性部材265と、を備えている。つまり、足部217は、上から順にバネ部262b、粘性部材265およびバネ部262bから構成され、多層化された板バネ部S21〜S24(S22,S24のみ図示)を備えており、介設された粘性部材265によって接地時等における板バネ部S21〜S24の振動を減衰可能な構成となっている。なお、多層化された板バネ本体262,262のうち、多層化されたバネ部262b,262bが、特許請求の範囲における「多層化された板バネ」に相当する。
【0092】
この粘性部材265は、減衰機能を有する素材から形成されていればよく、例えば、隣接する板バネ本体262に貼着されたゴム等が好適である。
かかる構成においては、粘性部材265が前記した中間部材63の機能も備えているため、中間部材63を省略することもできる。
ここでは、足平部材261全体を多層化する構成としたが、少なくとも板バネ部S21〜S24が多層化されていればよい。
【0093】
<第四の実施形態>
続いて、本発明の第四の実施形態に係るロボットRの足部について、第一の実施形態との相違点を中心に説明する。
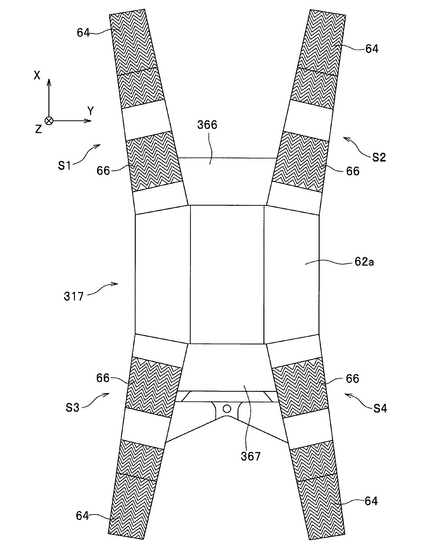
図12は、本発明の第四の実施形態に係る2足移動ロボットの足部を示す下面図である。図12に示すように、第四の実施形態に係る足部317は、板バネ部S1,S2間、S3,S4間にそれぞれ架け渡された連結部366,367を備えている。
連結部366は、板バネ部S1,S2間に架け渡されて両者の基端部側および基部62aを連結しており、両板バネ部S1,S2の挙動をシンクロさせる機能を有している。また、連結部367は、板バネ部S3,S4間に架け渡されて両者の基端部側をおよび基部62aを連結しており、両板バネ部S3,S4の挙動をシンクロさせる機能を有している。かかる連結部366,367は、基部62aおよびバネ部62bと一体成形されている。
かかる構成によると、板バネ部のロール方向またはピッチ方向の剛性を調整することができる。かかる連結部を用いない場合には、ロール剛性はピッチ剛性よりも小さくなる。つまり、剛性を確保したい任意の2個の板バネ部の間に連結部を架け渡す構成であればよい。また、連結部は基部62aから離れて形成されていてもよい。
また、一体成形された連結部ではなく、別体の連結部材を板バネ部間に架け渡す構成であってもよい。連結部材としては、所定の剛性を有する棒状または長板状の部材が好適である。また、連結部材と各板バネ部との連結は、ピン等の留め具によるものであってもよい。
【0094】
<板バネ部の変形例>
本発明の板バネ部の形状については様々な変更例が考えられる。以下、本発明の脚式移動ロボットの板バネ部の変形例について説明する。図13および図14は、本発明の脚式移動ロボットの板バネ部の変形例を示す底面図である。
【0095】
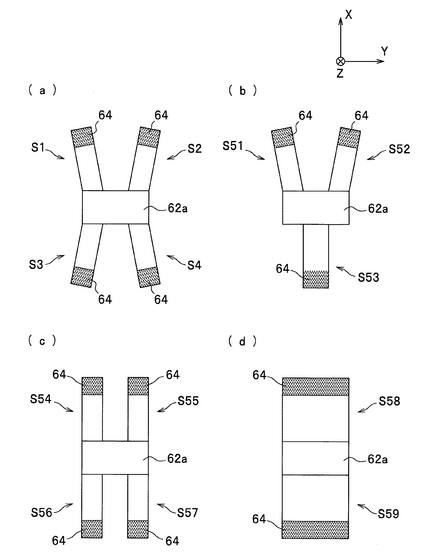
図13(a)の板バネ部S1,S2,S3,S4は、第一ないし第四実施形態で説明したように、略H字状に配置されている。板バネ部S1,S2、および板バネS3,S4がそれぞれX軸から開いていくように設けられているので、ロボットRがY軸(左右)方向に転倒しようとする力にも対抗できる。かかる開きの角度は適宜変更可能である。これら板バネ部は、X軸およびY軸についてそれぞれ線対称となっており、これら4個の板バネ部S1,S2,S3,S4は、同一バネ係数、同一長、同一形状であることが望ましい。このようにすることで、前進および後進のいずれにも同じようなバネ特性を発揮することができる。
【0096】
図13(b)の板バネ部S51,S52,S53は、Y字状に配置されている。前方に2個の板バネ部S51,S52が設けられているので、特に前進移動に向いている。
【0097】
図13(c)の板バネ部S54,S55,S56,S57は、H字状に配置されている。つまり、板バネ部S54,S56、板バネ部S55,S56の組がそれぞれ前後にのびる同一直線上に配置され、各組が平行となっている。これら板バネ部は、X軸およびY軸についてそれぞれ線対称となっており、これら4個の板バネ部S54,S55,S56,S57は、同一バネ係数、同一長、同一形状であることが望ましい。このようにすることで、前進および後進のいずれにも同じようなバネ特性を発揮することができる。
【0098】
図13(d)の板バネ部S58,S59は、I字状に配置されている。板バネ本体の形状がシンプルであり、加工が容易である。
【0099】
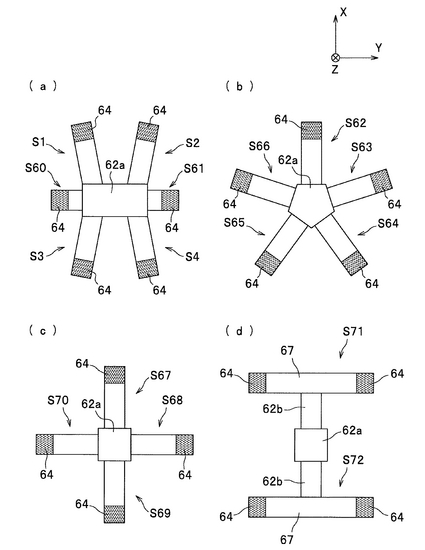
図14(a)の板バネ部S1,S2,S3,S4,S60,S61は、図13(a)に示したものに、さらに左右方向にそれぞれ板バネ部S60,S61が配置されている。この板バネ部S60,S61によって、さらに左右方向への転倒に強い構成となっている。なお、2足移動ロボットに適用する場合には、左右の脚部R1に対して、外側方向にのみ板バネ部S60または板バネ部S61を備える構成であってもよい。
【0100】
図14(b)の板バネ部S62,S63,S64,S65,S66は、その接地領域が正五角形の頂点となるように配置されている。例えば一個の板バネ部が浮いた状態であっても、残りの4個の板バネ部が接地していれば、かかる4個の板バネ部の接地領域からなる四角形内にロボットの荷重重心が残るため、転倒しにくい構成となっている。
【0101】
図14(c)の板バネ部S67,S68,S69,S70は、十字状に配置されている。図14(b)、(c)に示した構成は、3足以上を有し、方向特異性を持たないロボットに好適である。
【0102】
図14(d)の板バネ部S71,S72は、基部62aの前後に配置されている。板バネ部S71(S72)は、バネ部62bからなり、バネ部62bの先端部底面には、左右(Y軸)方向に延びる板材67が取り付けられている。そして、板材67の左右両端には、第一足底部材64が取り付けられている。このようにすることで、一つの板バネ部に対して複数の接地領域を形成することができる。
【0103】
これら各形状の板バネ部は、前記した第一ないし第四の実施形態の構成と組み合わせることが可能であり、また、その他の形状の板バネ部であってもよい。
【0104】
以上、本発明の実施形態について説明したが、本発明は前記実施形態に限定されず、本発明の要旨を逸脱しない範囲で適宜設計変更可能である。例えば、ロボットRは、図示した2足移動ロボットに限定されず、1本の脚部のみを備えた脚式移動ロボットまたは3本以上の脚部を備えた脚式移動ロボットであってもよい。
また、脚式移動ロボットの移動方式も、歩行に限定されず、スキップ、走行、跳ぶ等による移動であってもよい。
また、足首関節およびその駆動構造も前記したものに限定されない。
また、上腿リンク21、下腿リンク22、第一台座部51、第二台座部53等の材料も適宜変更可能であり、これら各部材は、例えば、所定の強度を有する合金(チタン合金、マグネシウム合金等)からなるものであってもよい。
また、第一中間部材63および第二中間部材65を一体化した中間部材に、第一足底部材64および第二足底部材66を一体化した足底部材に、それぞれ置き換えることも可能である。
また、板バネ部の底面側に各種中間部材および足底部材を備える構成としたが、板バネ部の振動や滑りの影響が小さい床面で使用する場合等には、中間部材および足底部材を省略することも可能である。
また、第一台座部51、第二台座部53の形状も適宜変更可能であり、これらを6軸力センサ52の筐体と一体とすることも可能である。また、板バネ部が取り付けられる基部の形状も変更可能であり、板バネ部を第二台座部53や6軸力センサ52の筐体に直接取り付ける構成であってもよい。かかる場合には、第二台座部53や6軸力センサ52が基部となる。
また、板バネ部の数、形状も適宜変更可能であり、複数の板バネを組み合わせて一つの板バネ部を構成することも可能である。
また、板バネ部の上方に、板バネ部が所定量以上変形することを防ぐ板バネ部変形規制部を備える構成であってもよい。かかる板バネ部変形規制手段としては、例えば、板バネ部の上方に離隔して設けられるフランジ部と、このフランジ部の底面に設けられた突起と、を備え、板バネ部が所定量変形した場合に板バネ部が突起に当接し、それ以上の変形を規制する構成が挙げられる。このようにすることで、ある板バネ部に過大な床反力が入力される場合であっても、板バネ部の変形量を規制し、板バネ部の破損を防ぐことができる。
また、足首関節の中心Pcの位置Paに対するオフセットの方向、距離も適宜設計変更可能であり、足首関節の中心Pcが位置Pa上に位置していてもよい。
【図面の簡単な説明】
【0105】
【図1】本発明に係る2足移動ロボットを示す側面図である。
【図2】図1の脚部の関節構造を示す模式図である。
【図3】第一の実施形態に係る2足歩行ロボットの足部を示す正面図である。
【図4】第一の実施形態に係る2足歩行ロボットの足部を示す側面図である。
【図5】第一の実施形態に係る2足歩行ロボットの足部を示す底面図である。
【図6】第一の実施形態に係る2足歩行ロボットの足部の接地状態の例を説明する模式図である。
【図7】第一の実施形態に係る2足歩行ロボットの前進移動(歩行)時における足平部の接地状態の変化を説明する模式図である。
【図8】第一の実施形態に係る2足歩行ロボットが段差のある床面を移動する場合を説明する模式図である。
【図9】第一の実施形態に係る2足移動ロボットが高速移動する場合を説明する模式図である。
【図10】第二の実施形態に係る2足移動ロボットの足部を説明する側面図である。
【図11】第三の実施形態に係る2足移動ロボットの足部を説明する側面図である。
【図12】第四の実施形態に係る2足移動ロボットの足部を説明する底面図である。
【図13】脚式移動ロボットの板バネ部の変形例を説明する模式図である。
【図14】脚式移動ロボットの板バネ部の変形例を説明する模式図である。
【符号の説明】
【0106】
11R,11L 関節(股関節、第一の関節)
12R,12L 関節(股関節、第一の関節)
13R,13L 関節(股関節、第一の関節)
15R,15L 関節(足首関節、第二の関節)
16R,16L 関節(足首関節、第二の関節)
17R,17L,17,117,217,317 足部
51 第一台座部
52 6軸力センサ(床反力検出手段、床反力検出器)
53 第二台座部
61 足平部材(足平部)
62 板バネ本体
62a 基部
62b,262b バネ部
63 第一中間部材
64 第一足底部材
65 第二中間部材
66 第二足底部材
152 歪み検出手段
265 粘性部材
366,367 連結部材
Pa 接地領域の最遠点までの距離が最小となる位置
Pb 6軸力センサの中心(床反力検出器の中心)
Pc 足首関節の中心(第二の関節の中心)
R 2足移動ロボット(脚式移動ロボット)
R1 脚部
R2 上体
S1〜S4,S21〜S24,S51〜S72 板バネ部
【技術分野】
【0001】
本発明は、脚式移動ロボットに関する。
【背景技術】
【0002】
脚式移動ロボット、特に脚式移動ロボットの足部構造に関する技術として、例えば特許文献1に記載の技術が知られている。特許文献1に記載の脚式歩行ロボットの足部は、上から順に、床反力を検出する6軸力センサ(床反力検出器)と、衝撃吸収機能を有するゴムブッシュを備えたバネ機構体と、足底フレームと、足底プレートと、ソールと、から構成される。
6軸力センサは、バネ機構体を介して足底フレームに接続されており、着地時に6軸力センサに加わる衝撃、特に斜め方向に働く衝撃をゴムブッシュが変形することによって低減することができる構成となっている。
【特許文献1】特開2003−71776号公報(段落0040〜0046、図2)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1に記載の脚式歩行ロボットは、部品点数が多く、構造が複雑であるという問題を有している。
そして、前記した脚式歩行ロボットにおいては、移動のスピード(歩行、走行)を高めることが望まれている。脚式歩行ロボットが高速で移動する場合に、脚部に大きな慣性力が生じる。かかる慣性力を小さくするために、脚部の末端側、すなわち足部の軽量化が望まれている。
また、脚式歩行ロボットが高速で移動する場合には、接地時に足部に加わる床反力による衝撃力も大きくなることから、脚式歩行ロボットの足部はかかる衝撃力に耐えうる構造であることが望ましい。
【0004】
本発明は、前記した背景に鑑み創案されたものであり、簡素な構造でありながら、着地時の衝撃を吸収でき、軽量化された足部を備えた脚式移動ロボットを提供することを課題とする。
【課題を解決するための手段】
【0005】
前記課題を解決するため、本発明の請求項1に記載の脚式移動ロボットは、上体と、前記上体に第一の関節を介して連結された脚部と、前記脚部の端部に第二の関節を介して連結された足部と、を備えた脚式移動ロボットであって、前記足部は、床面に接地する接地領域を下端部に有する足平部を備え、前記足平部は、接地時に撓みつつ自重を支持する板バネ部を備えていることを特徴とする。
【0006】
本発明において「接地領域」とは、脚式移動ロボットの移動時に床面と接地する領域のことである。
本発明において「自重」とは、脚式移動ロボットの自重のことである。また、「撓みつつ自重を支持する」とは、一以上の板バネ部が弾性変形し、一以上の板バネ部の弾性力によってロボットの自重を支持することを意味する。
本発明において「足平部」とは、脚式移動ロボットの足部の下部構造であり、床面からの反作用力を受ける部分である。本発明では、足平部が一以上の板バネ部を備えていることで、接地時に一以上の板バネ部が撓みつつ自重を支持する。
【0007】
また、請求項2に記載の脚式移動ロボットは、請求項1に記載の脚式移動ロボットであって、前記足平部は、複数の前記接地領域を備えていることを特徴とする。
【0008】
本発明において「複数の接地領域」とは、複数に分割された接地領域のことであり、例えば、板バネ部を複数設け、各板バネ部に一個ずつの接地領域を形成することによって得られる。また、一個の板バネ部に対して複数の接地領域を形成することも可能である。
このように、複数の接地領域を備えることによって、脚式移動ロボットが静止した状態であっても足平部が脚式移動ロボットをバランスよく支持することが可能となる。
【0009】
また、請求項3に記載の脚式移動ロボットは、請求項2に記載の脚式移動ロボットであって、複数の前記接地領域は、前記第二の関節に対して前後にわかれて配置されていることを特徴とする。
【0010】
例えば、人間を模した2足移動ロボットでは、人間の歩行に模して、足平部の後側(踵部分)から着地して前側(爪先部分)で蹴り上げるような制御が行われる。請求項3の脚式移動ロボットは、接地領域が前側および後側に配置されているので、かかる制御が好適に行われる。また、脚式移動ロボットの前進移動時には、脚式移動ロボットの前後方向に脚式移動ロボットの荷重中心が移動し、また、その荷重中心を理想的な位置に移動させる制御が行われるので、請求項3の脚式移動ロボットは、前後の接地領域によって踏ん張り、脚式移動ロボットの荷重中心を前後方向に移動させる制御が可能となる。
【0011】
また、請求項4に記載の脚式移動ロボットは、請求項1から請求項3のいずれか一項に記載の脚式移動ロボットであって、前記接地領域の少なくとも一つは、前記第二の関節から離れるにつれて上に向かって反っていることを特徴とする。
【0012】
このように、接地領域の底面形状を、第二の関節から離れるにつれて上に向かって反る形状とすることで、足平部が床面に対して傾いた状態で接地する場合等でも、接地領域を好適に確保することができる。また、接地面積を大きくして床面との間の摩擦力を確保することができる。
【0013】
また、請求項5に記載の脚式移動ロボットは、請求項1から請求項4のいずれか一項に記載の脚式移動ロボットであって、前記足平部は、前記接地領域として、接地時に前記床面との間で摩擦抵抗を生じる第一足底部材を備えていることを特徴とする。
【0014】
このようにすることで、足平部が床面に対して滑りにくくなり、スリップを防止できる。また、脚式移動ロボットの脚部の力を床面に対して効率よく伝えることができる。
【0015】
また、請求項6に記載の脚式移動ロボットは、請求項5に記載の脚式移動ロボットであって、前記板バネ部と前記第一足底部材との間に、前記第一足底部材の接地時に前記板バネ部の振動を減衰させる第一中間部材を備えていることを特徴とする。
【0016】
このようにすることで、第一足底部材の接地時に生じる板バネ部の振動を第一中間部材によって減衰させることができ、板バネ部の振動に伴う脚式移動ロボットの姿勢の不安定化を防ぐことができる。
【0017】
また、請求項7に記載の脚式移動ロボットは、請求項6に記載の脚式移動ロボットであって、前記第一中間部材は、前記第一足底部材の接地時に前記第一足底部材の前記板バネ部に対する床面方向の変位を許容することを特徴とする。
【0018】
このようにすることで、板バネ部の撓みに伴う第一足底部材における接地位置のずれを抑えることができる。
【0019】
また、請求項8に記載の脚式移動ロボットは、請求項5から請求項7のいずれか一項に記載の脚式移動ロボットであって、前記足平部は、前記第一足底部材よりも上方に、接地時に前記床面との間で摩擦抵抗を生じる第二足底部材を備えていることを特徴とする。
【0020】
このようにすることで、階段等段差がある床面を移動する場合に、通常の接地領域に設けられた第一足底部材以外の部分が接地する場合であっても、第二足底部材が接地することによってスリップを防止できる。また、脚式移動ロボットの脚部の力を床面に対して効率よく伝えることができる。
【0021】
また、請求項9に記載の脚式移動ロボットは、請求項8に記載の脚式移動ロボットであって、前記板バネ部と前記第二足底部材との間に、前記第二足底部材の接地時に前記板バネ部の振動を減衰させる第二中間部材を備えていることを特徴とする。
【0022】
このようにすることで、第二足底部材の接地時に生じる板バネ部の振動を第二中間部材によって減衰させることができ、板バネ部の振動に伴う脚式移動ロボットの姿勢の不安定化を防ぐことができる。
【0023】
また、請求項10に記載の脚式移動ロボットは、請求項9に記載の脚式移動ロボットであって、前記第二中間部材は、前記第二足底部材の接地時に前記第二足底部材の前記板バネ部に対する床面方向の変位を許容することを特徴とする。
【0024】
このようにすることで、板バネ部の撓みに伴う第二足底部材における接地位置のずれを抑えることができる。
【0025】
また、請求項11に記載の脚式移動ロボットは、請求項1から請求項10のいずれか一項に記載の脚式移動ロボットであって、前記足平部は、基部と、前記基部から下方にのび、下端部側に接地領域が形成された複数の前記板バネ部と、を備えていることを特徴とする。
【0026】
このようにすることで、複数の板バネ部を有する足平部を、簡素な構造で得ることができる。板バネ部と基部とは、別体に構成されていてもよいが、一体成形することも可能である。特に板バネ部および基部を一体成形とすることによって、さらなる部品点数の削減、足部の構造の簡略化が可能となる。
【0027】
また、請求項12に記載の脚式移動ロボットは、請求項11に記載の脚式移動ロボットであって、前記板バネ部を4個備え、そのうち2個の前記板バネ部は前記基部から前方にのび、かつ残りの2個の前記板バネ部は前記基部から後方にのびており、4個の前記板バネ部および前記基部が略H字状をなしていることを特徴とする。
【0028】
ここでいう「略H字状」としては、前方・後方にそれぞれ設けられた一対の板バネ部が互いに平行であってもよく、先端部に向かってやや開くように設けられていてもよいことを意味している。
【0029】
例えば、人間を模した2足移動ロボットでは、人間の歩行に模して、足平部の後側(踵部分)から着地して前側(爪先部分)で蹴り上げるような制御が行われる。請求項12の脚式移動ロボットは、接地領域が前側および後側に配置されているので、かかる制御が好適に行われる。また、脚式移動ロボットの前進移動時には、脚式移動ロボットの前後方向に脚式移動ロボットの荷重中心が移動し、また、その荷重中心を理想的な位置に移動させる制御が行われるので、請求項12の脚式移動ロボットは、前後の接地領域によって踏ん張り、脚式移動ロボットの荷重中心を前後方向に移動させる制御が可能となる。また、一対の板バネ部が先端部に向かってやや開くように設けられている場合には、脚式移動ロボットが左右に傾いて荷重が左右方向へずれた場合であっても踏ん張りが効く。
【0030】
また、請求項13に記載の脚式移動ロボットは、請求項1から請求項12のいずれか一項に記載の脚式移動ロボットであって、前記板バネ部は、繊維で強化された複合部材から形成されていることを特徴とする。
【0031】
本発明における「繊維で強化された複合部材」の一例として、プラスチックを強化用繊維で強化した繊維強化プラスチック(FRP:Fiber Reinforced Plastic)が挙げられる。また、強化用繊維としては、炭素繊維、ガラス繊維、有機繊維、金属繊維等が好適に使用可能である。このように、板バネ部を「繊維で強化された複合部材」から形成することによって、板バネ部自身の軽量化が可能となる。
【0032】
また、請求項14に記載の脚式移動ロボットは、請求項1から請求項13のいずれか一項に記載の脚式移動ロボットであって、前記板バネ部は、弾性率の異なる複数の層からなることを特徴とする。
【0033】
このようにすることで、脚式移動ロボットの移動時等における板バネ部の振動を減衰させることができ、脚式移動ロボットの姿勢の安定化が可能である。
【0034】
また、請求項15に記載の脚式移動ロボットは、請求項1から請求項13のいずれか一項に記載の脚式移動ロボットであって、前記板バネ部は、多層化された板バネと、前記板バネ間に介設された粘性部材と、から構成されることを特徴とする。
【0035】
このようにすることで、脚式移動ロボットの移動時等における板バネ部の振動を減衰させることができ、脚式移動ロボットの姿勢の安定化が可能である。
【0036】
また、請求項16に記載の脚式移動ロボットは、請求項1から請求項15のいずれか一項に記載の脚式移動ロボットであって、前記板バネ部の振動を減衰させる減衰手段を備えていることを特徴とする。
【0037】
このようにすることで、脚式移動ロボットの移動時等における板バネ部の振動を減衰させることができ、脚式移動ロボットの姿勢の安定化が可能である。前記した第一中間部材および第二中間部材も、減衰手段の一例である。その他、液圧を利用したダンパ装置等を減衰手段として適用可能である。ダンパ装置等によれば、足平部が床面から離れた際に生じる板バネ部の振動も減衰させることが可能となる。
【0038】
また、請求項17に記載の脚式移動ロボットは、請求項1から請求項16のいずれか一項に記載の脚式移動ロボットであって、前記板バネ部が複数あり、2個の前記板バネ部を連結させる連結部を備えていることを特徴とする。
【0039】
このようにすることで、足平部のバネ特性、特に剛性を調整することが可能となる。この連結部は、板バネ部と一体成形されていてもよく、板バネ部と別体の連結部材を各板バネ部に取付・固定したものであってもよい。なお、この連結部の形状、設置場所、個数等は適宜変更可能である。
【0040】
また、請求項18に記載の脚式移動ロボットは、請求項1から請求項17のいずれか一項に記載の脚式移動ロボットであって、前記足部は、前記足平部を介して前記床面から作用する床反力を検出する床反力検出手段を備えていることを特徴とする。
【0041】
本発明において「床反力検出手段」とは、足平部を介して入力される床反力、詳しくは床反力の並進力および床反力のモーメントの少なくとも一方を検出するためのものであり、少なくとも1軸方向の並進力またはモーメント(例えば、床面に垂直な軸方向の力Fz)を検出可能であればよい。
このように足部に床反力検出手段を設けることによって、より接地領域に近い場所での検出が可能となり、床反力をより正確に検出することができる。
【0042】
また、請求項19に記載の脚式移動ロボットは、請求項18に記載の脚式移動ロボットであって、前記床反力検出手段は、ユニット化された床反力検出器であることを特徴とする。
【0043】
本発明において「ユニット化」とは、ひとつの筐体内に部品を組み込んだ構成のことをいう。つまり、床反力検出手段の部品を筐体内に組み込んだものが床反力検出器である。このように、ユニット化された床反力検出器を使用することで、足部の組み立てが容易となる。
【0044】
また、請求項20に記載の脚式移動ロボットは、請求項19に記載の脚式移動ロボットであって、前記足平部は、前記床反力検出器に対して固定されていることを特徴とする。
【0045】
このようにすることで、脚式移動ロボットの足部のさらなる軽量化、簡略化が可能となる。
【0046】
また、請求項21に記載の脚式移動ロボットは、請求項19または請求項20に記載の脚式移動ロボットであって、前記足平部は、複数の前記接地領域を備えており、前記第二の関節の中心は、平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に対してオフセットしており、前記床反力検出器の中心は、前記第二の関節よりも平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に近くなるように設けられていることを特徴とする。
【0047】
特許文献1に記載の脚式歩行ロボットにおいては、第二の関節の中心は平面視で接地領域に対してオフセットしており、かつ第二の関節の中心および床反力検出器の中心は平面視で同じ位置に設けられていた。請求項21においては、床反力検出器の中心を平面視で第二の関節の中心に対してオフセットし、複数の接地領域の最遠点までの距離が最小となる位置に近づけたので、検出される床反力の値を小さくすることができ、床反力検出器の小型化が可能となる。
【0048】
また、請求項22に記載の脚式移動ロボットは、請求項19または請求項20に記載の脚式移動ロボットであって、前記足平部は、複数の前記接地領域を備えており、前記床反力検出器は、平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に設けられていることを特徴とする。
【0049】
このように床反力検出器の位置を設定することによって、検出される床反力の値を小さくすることができ、床反力検出器の小型化が可能となる。また、入力される床反力の最大値を抑えることができるので床反力検出器が故障しにくくなる。なお、床反力検出器の筐体が前記した位置に設けられていればよく、筐体の一部が前記した位置に位置する範囲内で筐体の位置を変更可能である。特に、床反力検出器の小型化の観点から見ると、床反力検出器の中心が平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に設けられていることが望ましい。
【0050】
また、請求項23に記載の脚式移動ロボットは、請求項20に記載の脚式移動ロボットであって、前記床反力検出手段は、前記板バネ部の歪みを検出する歪み検出手段であることを特徴とする。
【0051】
本発明において「歪み検出手段」とは、板バネ部の歪みを検出するためのものであり、例えば、歪みゲージ、ピエゾ素子等を利用したものが挙げられる。板バネ部は、床反力を受けて撓む(歪む)ものであり、その歪み量は床反力と相関する。そのため、板バネ部の歪みを検出することによって、床反力を検出することができる。
このように、板バネ部の歪みを検出することによって床反力を検出する構成とすることで、さらに足部の構成を簡略化することが可能となる。
また、板バネ部の歪みを検出することによって、床面の状態を検知することが可能となる。
【発明の効果】
【0052】
本発明によれば、着地時の衝撃を吸収でき、足部が軽量化かつ簡略化された脚式移動ロボットを提供することができる。
【発明を実施するための最良の形態】
【0053】
以下、本発明の実施形態について、本発明の脚式移動ロボットの構成を自律移動可能な2足移動ロボットに適用した場合を例にとり、適宜図面を参照しながら説明する。同様の部分には同一符号を付し、重複する説明を省略する。なお、位置、方向等に関する表現は、2足移動ロボットの前後方向にX軸、左右方向にY軸、上下方向にZ軸をとり、2足移動ロボットが起立姿勢をとった状態を基準として説明する。
【0054】
<2足移動ロボットR>
まず、本発明の2足移動ロボットについて図1を参照して説明する。図1は、本発明に係る2足移動ロボットを示す側面図である。
図1に示すように、2足移動ロボット(以下、単に「ロボット」ともいう)Rは、人間と同じように2本の脚部R1(1本のみ図示)により起立、移動(歩行、走行等)し、上体R2、2本の腕部R3(1本のみ図示)および頭部R4を有し、自律して移動するロボットである。そして、ロボットRは、これら脚部R1、上体R2、腕部R3および頭部R4の動作を制御する制御装置搭載部R5を背負う形で背中(上体R2の後方)に備えている。
【0055】
<脚部R1の関節構造>
続いて、ロボットRの脚部R1の関節構造について図2を参照して説明する。図2は、図1の脚部の関節構造を示す模式図である。
図2に示すように、ロボットRは、左右それぞれの脚部R1に6個の関節11R(L)〜16R(L)を備えている。左右12個の関節は、股部に設けられた脚回旋用(Z軸まわり)の股関節11R,11L(右側をR、左側をLとする。以下同じ。)、股部のロール軸(X軸)まわりの股関節12R,12L、股部のピッチ軸(Y軸)まわりの股関節13R,13L、膝部のピッチ軸(Y軸)まわりの膝関節14R,14L、足首のピッチ軸(Y軸)まわりの足首関節15R,15L、および、足首のロール軸(X軸)まわりの足首関節16R,16Lから構成されている。そして、脚部R1の下には足部17R,17Lが取り付けられている。
【0056】
すなわち、脚部R1は、股関節11R(L),12R(L),13R(L)、膝関節14R(L)および足首関節15R(L),16R(L)を備えている。股関節11R(L)〜13R(L)と膝関節14R(L)とは大腿リンク21R,21Lで、膝関節14R(L)と足首関節15R(L),16R(L)とは下腿リンク22R,22Lで連結されている。
なお、股関節11R(L)〜13R(L)が特許請求の範囲における「第一の関節」の一例であり、足首関節15R(L),16R(L)が特許請求の範囲における「第二の関節」の一例である。
【0057】
脚部R1は、股関節11R(L)〜13R(L)を介して上体R2に連結されている。図2では、脚部R1と上体R2との連結部を上体リンク23として簡略化して示す。また上体R2には、傾斜センサ24が設置されており、上体R2のZ軸(鉛直軸)方向に対する傾きおよび角速度を検出する。また、各関節を駆動する電動モータには、その回転量を検出するロータリエンコーダ(図示せず)が設けられる。
【0058】
このような構成により、脚部R1は左右の足について合計12の自由度を与えられ、歩行中にこれらの6*2=12個の関節を適宜な角度で駆動することで、足(脚部R1および足部17)全体に所望の動きを与えることができ、任意に3次元空間を歩行させることができる(この明細書で「*」は乗算を示す)。
【0059】
なお、図2に示すように、足首関節15R(L),16R(L)の下方には公知の6軸力センサ52が設けられ、ロボットRに作用する外力のうち、床面からロボットRに作用する床反力の3方向成分Fx,Fy,Fzとモーメントの3方向成分Mx,My,Mzとを検出する。これら6軸力センサ52、傾斜センサ24等が検出した床反力、モーメント、傾き、角速度等に関する信号が制御装置搭載部R5内に設けられた制御ユニット25に伝えられ、ロボットRの姿勢、動作等の制御に利用される。制御ユニット25は、メモリ(図示せず)に格納されたデータおよび入力された検出信号に基づいて関節駆動制御値を算出し、前記した関節を駆動する。
【0060】
<ロボットRの足部17>
ロボットRの足部17R(L)は、足首関節15R(L),16R(L)を介して脚部R1の端部(床面側)に取り付けられており、6軸力センサ52および足平部材61を備えている。左足(左の脚部R1および足部17L)と右足(右の脚部R1および足部17R)とは左右対称であるため、以下、必要のない場合にはR,Lを外して説明する。
【0061】
<第一の実施形態>
まず、本発明の第一の実施形態に係るロボットRの足部17について図3ないし図5を参照して説明する。図3は、本発明の第一の実施形態に係る2足移動ロボットの足部を示す正面図である。図4は、本発明の第一の実施形態に係る2足移動ロボットの足部を示す側面図である。図5は、本発明の第一の実施形態に係る2足移動ロボットの足部を示す底面図である。図3ないし図5の脚部R1および足部17は、図1に示すロボットRの外装部分を適宜取り除いた状態として示されている。なお、図3ないし図5には、ロボットRの左足(左の脚部R1および足部17L)が示されている。
【0062】
≪ロボットRの足首関節≫
ここで、図3および図4を参照し、ロボットRの足首関節15,16について簡単に説明する。ロボットRの足首関節15,16は、十字軸41を下腿リンク22および足部17の第一台座部51に連結することによって構成されている。
十字軸41は、Y軸を回動軸線とする軸41aと、X軸を回動軸線とする軸41bとを十字状に組み合わせた部材である。軸41aの両端部は、下腿リンク22によって回動可能に支持されている。また、軸41bの両端部は、第一台座部51によって回動可能に支持されている。すなわち、軸41aが足首関節15に相当し、軸41bが足首関節16に相当する。
【0063】
また、下腿リンク22の斜め後ろには、第一ロッド31および第二ロッド32が設けられている。第一ロッド31は、下腿リンク22の右斜め後方に設けられており、十字軸36を介して第一台座部51と連結されている。第二ロッド32は、下腿リンク22の左斜め後方に設けられており、十字軸37を介して第一台座部51と連結されている。これら第一ロッド31および第二ロッド32は、その上方(例えば、下腿リンク22、大腿リンク21等)に設けられた電動モータの回転によって生じた駆動力が減速機を介して伝えられることによって上下方向に進退し、足首関節15,16を動かし、また所定角度に維持する構成となっている。
【0064】
例えば、足部17の爪先部分を浮かせたい場合には、第一ロッド31および第二ロッド32を下に進出させ、足部17の踵部分を浮かせたい場合には、第一ロッド31および第二ロッド32を上に退行させる。また、足部17の左右のいずれかを浮かせたい場合には、浮かせたい側のロッドを上に退行させ、他方のロッドを下に進出させる。かかる第一ロッド31および第二ロッド32の動作は、前記した制御ユニット25によって制御される。
【0065】
≪ロボットRの足部17≫
図3ないし図5に示すように、ロボットRの足部17は、上(足首関節側)から順に、第一台座部51と、6軸力センサ52と、第二台座部53と、足平部材61と、を備えている。
【0066】
第一台座部51は、足部17の上部に設けられた部材であり、足首関節15,16と連結される部材である。
【0067】
6軸力センサ52は、前記したように3方向の床反力並進力および3方向の床反力のモーメントを検出する装置であり、各部品が筐体内に収められている(ユニット化)。本実施形態において、第一台座部51と6軸力センサ52とは複数のボルト(図示せず)により固定されている。この6軸力センサ52の出力は、ハーネスを介して前記制御ユニット25に入力される。
この6軸力センサ52が特許請求の範囲における「床反力検出手段」の一例であり、また「床反力検出器」の一例でもある。
【0068】
第二台座部53は、6軸力センサ52の下方、すなわち6軸力センサ52と足平部材61との間に設けられた部材であり、6軸力センサ52と足平部材61とを互いに固定するための部材である。本実施形態において、6軸力センサ52と第二台座部53とは複数のボルト(図示せず)により固定され、第二台座部53と足平部材61とは複数のボルト(図示せず)により固定されている。このように、6軸力センサ52と足平部材61とを第二台座部53を介して固定する構成としたので、足部17の構造の簡略化、軽量化が達成される。なお、足部17の各部材の組付構造は前記したものに限定されない。
【0069】
足平部材61は、第二台座部53の下方に取り付けられた部材であり、床面と接地する足平部の主要部分を構成している。この足平部材61が特許請求の範囲における「足平部」の一例である。
この足平部材61は、板バネ本体62、第一中間部材63、第一足底部材64、第二中間部材65および第二足底部材66を備えている。
板バネ本体62は、撓みつつロボットRの自重を支持する部分であり、主に基部62aと、基部62aからのびるバネ部62bと、から構成される。本実施形態において、板バネ本体62は、バネ部62bの基端部が基部62aに連結された形状に一体成形された部材である。
基部62aは、平板形状を有しており、第二台座部53の底面に沿う形状を有している。後記するバネ部62bの基端部が、この基部62aに連結されており、バネ部62bは、基部62aとの連結部分を基端部とした板バネとして機能する。
バネ部62bは、基部62aの端部から、角度θ(図4参照)で下向きにのびるバネ部分である。本実施形態では、4個のバネ部62b1,62b2,62b3,62b4があり、バネ部62b1,62b2は基部62aから前方(爪先方向)にのびており、バネ部62b3,62b4は基部62aから後方(踵方向)にのびている。これら各バネ部62b1,62b2,62b3,62b4は、同一形状、同一強度、同一性能(弾性率)とすることが望ましい。
角度θは、最大床反力Fzが作用した際に基部62aが床面に接地しない最小の角度に設定されていることが望ましい。ここでいう最大床反力Fzは、例えば、ロボットRが最高速度で走行し片足で接地した際に作用する反力である。かかる設定により、バネ部62b(62b1〜62b4)の弾性力によってロボットRの自重を支持しつつ、基部62aが接地して6軸力センサ52に悪影響を与えることを防ぐことができる。
【0070】
この板バネ本体62は、バネ部62bが板バネとして機能することが可能な素材であればよく、例えば、金属部材(鋼、アルミニウム合金、マグネシウム合金等)から形成されていてもよい。特に、繊維で強化された複合部材(繊維強化プラスチック等)から形成されている場合には、所望の強度や剛性を得つつ板バネ本体62の軽量化を図ることができる。この際、強化用繊維の繊維方向をバネ部62bの基端部から先端部へ向かう方向(長手方向)と一致させることによって、バネ部62bの強度を確保することができる。
また、各バネ部62bの繊維方向を変えることによって異方性を持たせ、各バネ部62bのバネ特性を変えることもできる。
強化用繊維としては、炭素繊維、ガラス繊維、有機繊維、金属繊維等が好適である。
この板バネ本体62は、一体成形された部材であることが望ましい。1個の基部62aに複数のバネ部62b(本実施形態では4個)が取り付けられた構成を有する板バネ本体62を一体成形することによって、さらなる部品点数の削減、および足部の構造の簡略化が可能となる。
【0071】
第一中間部材63は、バネ部62bの底面の接地領域に対応する部分、すなわち下端部側(本実施形態では先端部側と同一)に取り付けられた減衰部材であり、接地時に生じるバネ部62bの振動を減衰させる機能を有している。この中間部材63は特許請求の範囲における「減衰手段」の一例でもある。この第一中間部材63は減衰機能を備えた素材から形成されたものであればよく、例えば、発泡樹脂等から形成されたものが好適である。また、第一中間部材63の代わりの減衰手段として、液圧を利用したダンパ装置等を設置する構成であってもよい。このダンパ装置は、第一中間部材63と併用可能である。
【0072】
第一足底部材64は、第一中間部材63の底面に取り付けられた部材であり、足平部材61の下端部に位置し、移動時に実際に床面に接地する部材である。この第一足底部材64は、床面との間に発生する摩擦抵抗により滑り止めの機能を発揮する部材である。この第一足底部材64は滑り止め機能を備えた素材から形成されたものであればよく、例えば、ゴムから形成されたものが好適である。この第一足底部材64の底面が、特許請求の範囲における「接地領域」である。
【0073】
第二中間部材65は、バネ部62bの底面の中間部分に取り付けられた減衰部材であり、後記する第二足底部材66が接地した際に生じるバネ部62bの振動を減衰させる機能を有している。この第二中間部材65は第一中間部材63と同様に、減衰機能を備えた素材から形成されたものであればよく、例えば発泡樹脂等から形成されたものが好適である。
【0074】
第二足底部材66は、第二中間部材65の底面に取り付けられた部材であり、前記した第一足底部材64と同様に、床面との間に発生する摩擦抵抗により滑り止めの機能を発揮する部材である。この第二足底部材66は、第一足底部材64よりも上方に位置している。
【0075】
本実施形態において、4個の板バネ部S1,S2,S3,S4は、それぞれバネ部62bから構成されている。さらに詳しくは、板バネ部S1は、バネ部62b1から構成され、板バネ部S2は、バネ部62b2から構成され、板バネ部S3はバネ部62b3から構成され、板バネ部S4はバネ部62b4から構成されている。そして各板バネ部S1,S2,S3,S4の先端に設けられた第一足底部材64が接地した際には、これら各板バネ部S1,S2,S3,S4が弾性変形しつつ、弾性変形した状態の各板バネ部S1,S2,S3,S4によってロボットRの自重、詳しくはロボットRのバネ部62bよりも上部の構造による荷重全体を支持する構成となっている。そのため、簡易な構成でありながらロボットRの自重を支持し、さらに床反力による衝撃を吸収することができる。また、衝撃吸収能を高めることによって、ロボットRの移動(歩行、走行)速度を高めることが可能となる。
【0076】
また、ゴムブッシュ等が不要となり、足部17の軽量化が可能となる。かかる軽量化により、脚部R1にかかる慣性力が小さくなるので、高速移動に適した構造となる。
【0077】
また、各板バネ部S1,S2,S3,S4および基部62aは、平面視略H字状に配置されている。かかる構成により、接地領域が前側および後側に2箇所ずつ配置され、かつそれぞれ前後にのびるように配置された各板バネ部S1,S2,S3,S4のバネ特性が前後方向の荷重制御に適しているので、かかる足平構造は、2足移動の制御や、前後の接地領域によって踏ん張り、ロボットRの荷重中心を前後方向に移動させる制御に適している。また、板バネ部S1,S2および板バネ部S3,S4の各組が先端部に向かってやや開くように設けられているので、ロボットRが左右に傾いて荷重が左右方向へずれた場合であっても踏ん張りが効く。
【0078】
また、床面形状に凹凸がある場合等には、各板バネ部S1〜S4のうちのいずれかが浮いた(接地していない)状態となることが考えられる。このような場合には、板バネ部S1〜S4の曲げバネ特性(ロール剛性、ピッチ剛性)が非線形的に変化してしまう。そのため、制御ユニット25は、6軸力センサ52からの信号等に基づいて、全ての板バネ部S1〜S4が接地して撓むように目標足平位置姿勢を修正し、ロボットRが目標床反力を発生させるような姿勢をとるように制御している。かかる目標足平位置姿勢の修正量は、6軸力センサ52の検出値から推測した板バネ部の浮き具合に応じて非線形演算で算出される。
【0079】
ここで、ロボットRの足部17を真下に下ろして接地させる場合について図6を参照して説明する。図6は、第一の実施形態に係る2足移動ロボットの足部の接地状態の例を示す模式図であり、(a)は接地初期を示す図、(b)はロボット自重が加わった状態を示す図、(c)は(a)の要部拡大模式図、(d)は(b)の要部拡大模式図である。
まず、図6(a)に示すように、各板バネ部S1,S2,S3,S4(うちS2,S4のみ図示)の先端に設けられた第一足底部材64(接地領域)が均等に接地する。さらに各板バネ部S1〜S4に荷重が加わると、各バネ部62bに床反力が作用してバネ部62bが撓む。この際、バネ部62bの角度がθ’(θ’<θ)となり、接地領域の上側となるバネ部62bの点P2が、接地領域の点P1に対して外側にずれる(図6(c)、(d)参照)。つまり、板バネ部S2,S4の底面側の接地点P1,P1間の距離が、L(a)からL(b)へと広がる(L(b)>L(a))。ここで角度θが大きいと、このずれも大きくなるので、前記したような範囲で角度θを小さく設定することが望ましい。また、第一中間部材63は、第一足底部材64のバネ部62bに対する床面方向の変位も許容するので、図6(b)に示すように、バネ部62bの撓みに伴う接地領域の床面に対する滑りを抑えることが可能となる。したがって、かかる滑りによる反力およびモーメントが6軸力センサ52に入力されて、ロボットRの姿勢の制御の障害となることを抑えることができる。また、第一中間部材63の素材や厚さを変更することによって、滑りの許容量や減衰能を適宜設定することができる。
【0080】
ここで、図5を参照して、接地領域の最遠点までの距離が最小となる位置Paと、6軸力センサの中心Pbと、足首関節の中心Pcとの関係について説明する。
本実施形態において、6軸力センサの中心Pb(ここでは、6軸力センサ52のZ軸方向感度中心と一致する。)は、ロボットRの起立静止状態において板バネ部S1〜S4の底面側に設けられた接地領域のうち、平面視(図5では底面視)での最遠点までの距離が最小となる位置(接地領域の中心ともいう。)Pa(以下、単に「位置Pa」と記載する。)の上方に設けられている。本実施形態では、各板バネ部S1,S2,S3,S4の底面の接地領域それぞれの最遠点までの距離L1,L2,L3,L4が等しくなっている。
かかる構成によると、移動時に6軸力センサ52に作用する荷重の最大値を抑えることができ、6軸力センサ52の小型化が可能である。また、6軸力センサ52を足部17に設け、接地領域に近づけたことにより、床反力およびモーメントのより正確な測定が可能となる。
【0081】
なお、接地領域が正多角形状に配置されている場合には、各接地領域から6軸力センサ52までの距離が等しくなるように配置することになる。また、6軸力センサ52に変えて、少なくとも1軸の床反力またはモーメント(例えば、Z軸方向の床反力の並進力Fz)を検出する床反力検出器を用いる構成であってもよい。
【0082】
また、本実施形態において、足首関節の中心Pcは、平面視で位置Paに対してオフセットしている。ここでは、軸41aおよび軸41b(図3参照)の交点が足首関節の中心Pcに相当する。この足首関節の中心Pcは、位置PaよりもロボットRの後方に設けられている。このように足首関節15,16が足平部材61の接地領域に対して後方にオフセットしている理由については後記する。
なお、足首関節の中心Pcは、さらに足平部材61の接地領域の内側(ロボットRの中心側)にもオフセットしている構成であってもよい。足首関節の中心Pcを内側にオフセットすることにより、隣接する足部17R,17Lの足平部材61同士の干渉を防ぎ、かつ接地面積を確保してロボットRの姿勢の安定性を維持することができる。
【0083】
また、本実施形態において、6軸力センサの中心Pbが位置Pa上に設けられるようにしたが、6軸力センサの中心Pbは、少なくとも平面視で足首関節の中心Pcよりも位置Paに近くなるように設けられていればよい。言い換えると、6軸力センサの中心Pbは、平面視で位置Paを中心とし、位置Pa、足首関節の中心Pc間の長さを半径とする円Cの内部にあればよい。例えば、位置Pa、足首関節の中心Pcを結ぶ線分上に6軸力センサの中心Pbが位置する構成であってもよい。かかる構成であっても、移動時に6軸力センサ52に作用する荷重の最大値を抑えることができ、6軸力センサ52の小型化が可能である。特に、6軸力センサの中心Pbが位置Pa上にある場合には、6軸力センサ52の小型化という効果を最大に発揮することができる。
【0084】
また、図4に示すように、板バネ部S1〜S4の下端部(先端部)は、足首関節15,16から離れるにつれて上に向かって反る形状を有しており、その底面に設けられた第一足底部材64も同様の形状を有している。これは、かかるロボットRの歩行の制御が、踵部分から接地して爪先部分で蹴り上げるようになっているため、接地時および蹴り上げ時に接地する面積を大きくし、床面との間の摩擦力を確保することを可能とするためである。また、接地領域を面で確保できるので、ロボットRの姿勢の安定化にもつながる。
【0085】
ここで、ロボットRの前進移動(歩行)時における板バネ部S1〜S4の接地状態の変化について図7を参照して説明する。図7は、第一の実施形態に係る2足移動ロボットの前進移動(歩行)時における足平部の接地状態の変化を説明する模式図である。
まず、宙に浮いた足平部材61を着地させる場合には、踵部分の板バネ部S3,S4に設けられた第一足底部材64(接地領域)から接地させる(図7(a))。そして全ての板バネ部S1〜S4の接地領域の全体が接地する(図7(b))。そして、踵部分の板バネ部S3,S4の接地領域を浮かせて、爪先部分の板バネ部S1,S2の接地領域だけで接地し、蹴り上げることによって全ての板バネ部S1〜S4の接地領域を浮かせる(図7(c))。かかる動作を左右の脚部R1に行わせることによって、ロボットRが前進移動する。このように、板バネ部S1〜S4の下端部(先端部)が上に向かって反っているので、着地時(図7(a))や蹴り上げ時(図7(c))のように足部17が床面に対して斜めになっても接地領域を好適に確保することが可能となる。なお、かかる反りは、ロボットRの進行方向において足首関節15,16から離れるにつれて板バネ部62bが上に向かって反るように設定されているのが好ましく、各板バネ部の先端部の反り具合は適宜変更可能である。また、接地領域の少なくとも一つが反っていればよく、接地領域の全てが反っている構成であってもよい。
【0086】
続いて、ロボットRが段差のある床面を移動する場合について説明する。図8は、第一の実施形態に係る2足移動ロボットが段差のある床面を移動する場合を説明する模式図である。
図8に示すように、床面に段差がある場所を移動する場合には、バネ部62b(62b2,62b4を図示)の第一足底部材64が設けられていない部分が接地するおそれがある。しかし、バネ部62bの中間部分に第二足底部材66を設けているので、このような場合であっても第二足底部材66が接地し、バネ部62b、すなわち板バネ部が直接接地することによる不具合(滑りの発生等)を解消することができる。
【0087】
続いて、足首関節15,16が足平部材61の接地領域の後方にオフセットしている理由について、ロボットRが高速移動(走行)する場合を例にとり説明する。図9は、第一の実施形態に係る2足移動ロボットが高速移動する場合を説明する模式図であり、(a)は足首関節が足平部に対して後方にオフセットしている図、(b)は足首関節が足平部の前後方向中心に位置している図である。なお、図9(b)において、図9(a)と同様の部分には「’」を付加した符号を用いる。
図9(a)に示すように、足首関節15,16は、足平部材61に対して後方にオフセット(偏倚)している。この場合には、足首関節15’,16’から足平部材61の接地部分の前方先端までの距離Laが長くなる(La>La’)。ロボットRが高速移動(走行)する場合には、膝関節14を深く折り曲げ、足平部材61の爪先部分に床反力Fが集中する状態が生じる。このとき、膝関節14に生じるモーメントは、F*Lbとなる。一方、図9(b)に示すように、足首関節15’,16’が、足平部材61’の前後方向中心に位置している場合に膝関節14’に生じるモーメントは、F’*Lb’となる。ここで、Lb<Lb’であるので、F=F’とするとF*Lb<F’*Lb’が成立する。これは、高速移動時に膝関節14を駆動(屈曲)した場合において、足首関節15,16を足平部材61に対して、膝関節14の足平部材61に対する相対移動方向(本実施形態では前方)と反対方向(本実施形態では後方)にオフセットさせた場合に成立する。そして、足首関節15,16の足平部材61に対する後方へのオフセット量を大きくすると、高速移動時における膝関節14にかかる負担をより抑えることができることを意味している。
【0088】
<第二の実施形態>
続いて本発明の第二の実施形態に係るロボットRの足部について、第一の実施形態との相違点を中心に説明する。
図10は、本発明の第二の実施形態に係る2足移動ロボットの足部を示す側面図である。図10に示すように、第二の実施形態に係る足部117は、6軸力センサ52の代わりに歪み検出手段152を備えている。そして、第一台座部51と板バネ手段61とが複数のボルト(図示せず)により固定されている。
歪み検出手段152は、板バネ部の歪み、詳しくはバネ部62bの歪みを検出するものである。板バネ部の歪みは板バネ部に入力される床反力と相関するので、板バネ部の歪み量を検出することによって床反力を検出することができる。検出された歪み量は、ハーネスを介して制御ユニット25に伝えられ、ロボットRの姿勢、移動等の制御に使用される。かかる歪み検出手段152としては、各バネ部62bに取り付けられた1以上の歪みゲージまたはピエゾ素子が好適である。
かかる歪み検出手段152が検出する床反力は、少なくとも1軸(例えば、Z軸方向の床反力Fz)であればよく、前記した6軸力センサ52と同様に6軸であることが望ましい。
【0089】
このように歪み検出手段152を設けることにより、床反力検出器52を省略することが可能となり、足部17のさらなる軽量化が可能となる。また、板バネ部S1〜S4の歪みを検出することによって、床面の形状を検知することができる。
【0090】
<第三の実施形態>
続いて、本発明の第三の実施形態に係るロボットRの足部について、第一の実施形態との相違点を中心に説明する。
図11は、本発明の第三の実施形態に係る2足移動ロボットの足部を示す側面図である。図11に示すように、第三の実施形態に係る足部217は、足平部材61の代わりに多層化された足平部材261を備えている。
【0091】
足平部材261は、多層化された複数の板バネ本体262,262と、これら板バネ本体262,262間に介設された粘性部材265と、を備えている。つまり、足部217は、上から順にバネ部262b、粘性部材265およびバネ部262bから構成され、多層化された板バネ部S21〜S24(S22,S24のみ図示)を備えており、介設された粘性部材265によって接地時等における板バネ部S21〜S24の振動を減衰可能な構成となっている。なお、多層化された板バネ本体262,262のうち、多層化されたバネ部262b,262bが、特許請求の範囲における「多層化された板バネ」に相当する。
【0092】
この粘性部材265は、減衰機能を有する素材から形成されていればよく、例えば、隣接する板バネ本体262に貼着されたゴム等が好適である。
かかる構成においては、粘性部材265が前記した中間部材63の機能も備えているため、中間部材63を省略することもできる。
ここでは、足平部材261全体を多層化する構成としたが、少なくとも板バネ部S21〜S24が多層化されていればよい。
【0093】
<第四の実施形態>
続いて、本発明の第四の実施形態に係るロボットRの足部について、第一の実施形態との相違点を中心に説明する。
図12は、本発明の第四の実施形態に係る2足移動ロボットの足部を示す下面図である。図12に示すように、第四の実施形態に係る足部317は、板バネ部S1,S2間、S3,S4間にそれぞれ架け渡された連結部366,367を備えている。
連結部366は、板バネ部S1,S2間に架け渡されて両者の基端部側および基部62aを連結しており、両板バネ部S1,S2の挙動をシンクロさせる機能を有している。また、連結部367は、板バネ部S3,S4間に架け渡されて両者の基端部側をおよび基部62aを連結しており、両板バネ部S3,S4の挙動をシンクロさせる機能を有している。かかる連結部366,367は、基部62aおよびバネ部62bと一体成形されている。
かかる構成によると、板バネ部のロール方向またはピッチ方向の剛性を調整することができる。かかる連結部を用いない場合には、ロール剛性はピッチ剛性よりも小さくなる。つまり、剛性を確保したい任意の2個の板バネ部の間に連結部を架け渡す構成であればよい。また、連結部は基部62aから離れて形成されていてもよい。
また、一体成形された連結部ではなく、別体の連結部材を板バネ部間に架け渡す構成であってもよい。連結部材としては、所定の剛性を有する棒状または長板状の部材が好適である。また、連結部材と各板バネ部との連結は、ピン等の留め具によるものであってもよい。
【0094】
<板バネ部の変形例>
本発明の板バネ部の形状については様々な変更例が考えられる。以下、本発明の脚式移動ロボットの板バネ部の変形例について説明する。図13および図14は、本発明の脚式移動ロボットの板バネ部の変形例を示す底面図である。
【0095】
図13(a)の板バネ部S1,S2,S3,S4は、第一ないし第四実施形態で説明したように、略H字状に配置されている。板バネ部S1,S2、および板バネS3,S4がそれぞれX軸から開いていくように設けられているので、ロボットRがY軸(左右)方向に転倒しようとする力にも対抗できる。かかる開きの角度は適宜変更可能である。これら板バネ部は、X軸およびY軸についてそれぞれ線対称となっており、これら4個の板バネ部S1,S2,S3,S4は、同一バネ係数、同一長、同一形状であることが望ましい。このようにすることで、前進および後進のいずれにも同じようなバネ特性を発揮することができる。
【0096】
図13(b)の板バネ部S51,S52,S53は、Y字状に配置されている。前方に2個の板バネ部S51,S52が設けられているので、特に前進移動に向いている。
【0097】
図13(c)の板バネ部S54,S55,S56,S57は、H字状に配置されている。つまり、板バネ部S54,S56、板バネ部S55,S56の組がそれぞれ前後にのびる同一直線上に配置され、各組が平行となっている。これら板バネ部は、X軸およびY軸についてそれぞれ線対称となっており、これら4個の板バネ部S54,S55,S56,S57は、同一バネ係数、同一長、同一形状であることが望ましい。このようにすることで、前進および後進のいずれにも同じようなバネ特性を発揮することができる。
【0098】
図13(d)の板バネ部S58,S59は、I字状に配置されている。板バネ本体の形状がシンプルであり、加工が容易である。
【0099】
図14(a)の板バネ部S1,S2,S3,S4,S60,S61は、図13(a)に示したものに、さらに左右方向にそれぞれ板バネ部S60,S61が配置されている。この板バネ部S60,S61によって、さらに左右方向への転倒に強い構成となっている。なお、2足移動ロボットに適用する場合には、左右の脚部R1に対して、外側方向にのみ板バネ部S60または板バネ部S61を備える構成であってもよい。
【0100】
図14(b)の板バネ部S62,S63,S64,S65,S66は、その接地領域が正五角形の頂点となるように配置されている。例えば一個の板バネ部が浮いた状態であっても、残りの4個の板バネ部が接地していれば、かかる4個の板バネ部の接地領域からなる四角形内にロボットの荷重重心が残るため、転倒しにくい構成となっている。
【0101】
図14(c)の板バネ部S67,S68,S69,S70は、十字状に配置されている。図14(b)、(c)に示した構成は、3足以上を有し、方向特異性を持たないロボットに好適である。
【0102】
図14(d)の板バネ部S71,S72は、基部62aの前後に配置されている。板バネ部S71(S72)は、バネ部62bからなり、バネ部62bの先端部底面には、左右(Y軸)方向に延びる板材67が取り付けられている。そして、板材67の左右両端には、第一足底部材64が取り付けられている。このようにすることで、一つの板バネ部に対して複数の接地領域を形成することができる。
【0103】
これら各形状の板バネ部は、前記した第一ないし第四の実施形態の構成と組み合わせることが可能であり、また、その他の形状の板バネ部であってもよい。
【0104】
以上、本発明の実施形態について説明したが、本発明は前記実施形態に限定されず、本発明の要旨を逸脱しない範囲で適宜設計変更可能である。例えば、ロボットRは、図示した2足移動ロボットに限定されず、1本の脚部のみを備えた脚式移動ロボットまたは3本以上の脚部を備えた脚式移動ロボットであってもよい。
また、脚式移動ロボットの移動方式も、歩行に限定されず、スキップ、走行、跳ぶ等による移動であってもよい。
また、足首関節およびその駆動構造も前記したものに限定されない。
また、上腿リンク21、下腿リンク22、第一台座部51、第二台座部53等の材料も適宜変更可能であり、これら各部材は、例えば、所定の強度を有する合金(チタン合金、マグネシウム合金等)からなるものであってもよい。
また、第一中間部材63および第二中間部材65を一体化した中間部材に、第一足底部材64および第二足底部材66を一体化した足底部材に、それぞれ置き換えることも可能である。
また、板バネ部の底面側に各種中間部材および足底部材を備える構成としたが、板バネ部の振動や滑りの影響が小さい床面で使用する場合等には、中間部材および足底部材を省略することも可能である。
また、第一台座部51、第二台座部53の形状も適宜変更可能であり、これらを6軸力センサ52の筐体と一体とすることも可能である。また、板バネ部が取り付けられる基部の形状も変更可能であり、板バネ部を第二台座部53や6軸力センサ52の筐体に直接取り付ける構成であってもよい。かかる場合には、第二台座部53や6軸力センサ52が基部となる。
また、板バネ部の数、形状も適宜変更可能であり、複数の板バネを組み合わせて一つの板バネ部を構成することも可能である。
また、板バネ部の上方に、板バネ部が所定量以上変形することを防ぐ板バネ部変形規制部を備える構成であってもよい。かかる板バネ部変形規制手段としては、例えば、板バネ部の上方に離隔して設けられるフランジ部と、このフランジ部の底面に設けられた突起と、を備え、板バネ部が所定量変形した場合に板バネ部が突起に当接し、それ以上の変形を規制する構成が挙げられる。このようにすることで、ある板バネ部に過大な床反力が入力される場合であっても、板バネ部の変形量を規制し、板バネ部の破損を防ぐことができる。
また、足首関節の中心Pcの位置Paに対するオフセットの方向、距離も適宜設計変更可能であり、足首関節の中心Pcが位置Pa上に位置していてもよい。
【図面の簡単な説明】
【0105】
【図1】本発明に係る2足移動ロボットを示す側面図である。
【図2】図1の脚部の関節構造を示す模式図である。
【図3】第一の実施形態に係る2足歩行ロボットの足部を示す正面図である。
【図4】第一の実施形態に係る2足歩行ロボットの足部を示す側面図である。
【図5】第一の実施形態に係る2足歩行ロボットの足部を示す底面図である。
【図6】第一の実施形態に係る2足歩行ロボットの足部の接地状態の例を説明する模式図である。
【図7】第一の実施形態に係る2足歩行ロボットの前進移動(歩行)時における足平部の接地状態の変化を説明する模式図である。
【図8】第一の実施形態に係る2足歩行ロボットが段差のある床面を移動する場合を説明する模式図である。
【図9】第一の実施形態に係る2足移動ロボットが高速移動する場合を説明する模式図である。
【図10】第二の実施形態に係る2足移動ロボットの足部を説明する側面図である。
【図11】第三の実施形態に係る2足移動ロボットの足部を説明する側面図である。
【図12】第四の実施形態に係る2足移動ロボットの足部を説明する底面図である。
【図13】脚式移動ロボットの板バネ部の変形例を説明する模式図である。
【図14】脚式移動ロボットの板バネ部の変形例を説明する模式図である。
【符号の説明】
【0106】
11R,11L 関節(股関節、第一の関節)
12R,12L 関節(股関節、第一の関節)
13R,13L 関節(股関節、第一の関節)
15R,15L 関節(足首関節、第二の関節)
16R,16L 関節(足首関節、第二の関節)
17R,17L,17,117,217,317 足部
51 第一台座部
52 6軸力センサ(床反力検出手段、床反力検出器)
53 第二台座部
61 足平部材(足平部)
62 板バネ本体
62a 基部
62b,262b バネ部
63 第一中間部材
64 第一足底部材
65 第二中間部材
66 第二足底部材
152 歪み検出手段
265 粘性部材
366,367 連結部材
Pa 接地領域の最遠点までの距離が最小となる位置
Pb 6軸力センサの中心(床反力検出器の中心)
Pc 足首関節の中心(第二の関節の中心)
R 2足移動ロボット(脚式移動ロボット)
R1 脚部
R2 上体
S1〜S4,S21〜S24,S51〜S72 板バネ部
【特許請求の範囲】
【請求項1】
上体と、前記上体に第一の関節を介して連結された脚部と、前記脚部の端部に第二の関節を介して連結された足部と、を備えた脚式移動ロボットであって、
前記足部は、床面に接地する接地領域を下端部に有する足平部を備え、
前記足平部は、接地時に撓みつつ自重を支持する板バネ部を備えていることを特徴とする脚式移動ロボット。
【請求項2】
前記足平部は、複数の前記接地領域を備えていることを特徴とする請求項1に記載の脚式移動ロボット。
【請求項3】
複数の前記接地領域は、前記第二の関節に対して前後にわかれて配置されていることを特徴とする請求項2に記載の脚式移動ロボット。
【請求項4】
前記接地領域の少なくとも一つは、前記第二の関節から離れるにつれて上に向かって反っていることを特徴とする請求項1から請求項3のいずれか一項に記載の脚式移動ロボット。
【請求項5】
前記足平部は、前記接地領域として、接地時に前記床面との間で摩擦抵抗を生じる第一足底部材を備えていることを特徴とする請求項1から請求項4のいずれか一項に記載の脚式移動ロボット。
【請求項6】
前記板バネ部と前記第一足底部材との間に、前記第一足底部材の接地時に前記板バネ部の振動を減衰させる第一中間部材を備えていることを特徴とする請求項5に記載の脚式移動ロボット。
【請求項7】
前記第一中間部材は、前記第一足底部材の接地時に前記第一足底部材の前記板バネ部に対する床面方向の変位を許容することを特徴とする請求項6に記載の脚式移動ロボット。
【請求項8】
前記足平部は、前記第一足底部材よりも上方に、接地時に前記床面との間で摩擦抵抗を生じる第二足底部材を備えていることを特徴とする請求項5から請求項7のいずれか一項に記載の脚式移動ロボット。
【請求項9】
前記板バネ部と前記第二足底部材との間に、前記第二足底部材の接地時に前記板バネ部の振動を減衰させる第二中間部材を備えていることを特徴とする請求項8に記載の脚式移動ロボット。
【請求項10】
前記第二中間部材は、前記第二足底部材の接地時に前記第二足底部材の前記板バネ部に対する床面方向の変位を許容することを特徴とする請求項9に記載の脚式移動ロボット。
【請求項11】
前記足平部は、基部と、前記基部から下方にのび、底面側に前記接地領域が形成された複数の前記板バネ部と、を備えていることを特徴とする請求項1から請求項10のいずれか一項に記載の脚式移動ロボット。
【請求項12】
前記板バネ部を4個備え、そのうち2個の前記板バネ部は前記基部から前方にのび、かつ残りの2個の前記板バネ部は前記基部から後方にのびており、4個の前記板バネ部および前記基部が略H字状をなしていることを特徴とする請求項11に記載の脚式移動ロボット。
【請求項13】
前記板バネ部は、繊維で強化された複合部材から形成されていることを特徴とする請求項1から請求項12のいずれか一項に記載の脚式移動ロボット。
【請求項14】
前記板バネ部は、弾性率の異なる複数の層からなることを特徴とする請求項1から請求項13のいずれか一項に記載の脚式移動ロボット。
【請求項15】
前記板バネ部は、多層化された板バネと、前記板バネ間に介設された粘性部材と、から構成されることを特徴とする請求項1から請求項13のいずれか一項に記載の脚式移動ロボット。
【請求項16】
前記板バネ部の振動を減衰させる減衰手段を備えていることを特徴とする請求項1から請求項15のいずれか一項に記載の脚式移動ロボット。
【請求項17】
前記板バネ部が複数あり、2個の前記板バネ部を連結させる連結部を備えていることを特徴とする請求項1から請求項16のいずれか一項に記載の脚式移動ロボット。
【請求項18】
前記足部は、前記足平部を介して前記床面から作用する床反力を検出する床反力検出手段を備えていることを特徴とする請求項1から請求項17のいずれか一項に記載の脚式移動ロボット。
【請求項19】
前記床反力検出手段は、ユニット化された床反力検出器であることを特徴とする請求項18に記載の脚式移動ロボット。
【請求項20】
前記足平部は、前記床反力検出器に対して固定されていることを特徴とする請求項19に記載の脚式移動ロボット。
【請求項21】
前記足平部は、複数の前記接地領域を備えており、
前記第二の関節の中心は、平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に対してオフセットしており、
前記床反力検出器の中心は、前記第二の関節の中心よりも平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に近くなるように設けられていることを特徴とする請求項19または請求項20に記載の脚式移動ロボット。
【請求項22】
前記足平部は、複数の前記接地領域を備えており、
前記床反力検出器は、平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に設けられていることを特徴とする請求項19または請求項20に記載の脚式移動ロボット。
【請求項23】
前記床反力検出手段は、前記板バネ部の歪みを検出する歪み検出手段であることを特徴とする請求項18に記載の脚式移動ロボット。
【請求項1】
上体と、前記上体に第一の関節を介して連結された脚部と、前記脚部の端部に第二の関節を介して連結された足部と、を備えた脚式移動ロボットであって、
前記足部は、床面に接地する接地領域を下端部に有する足平部を備え、
前記足平部は、接地時に撓みつつ自重を支持する板バネ部を備えていることを特徴とする脚式移動ロボット。
【請求項2】
前記足平部は、複数の前記接地領域を備えていることを特徴とする請求項1に記載の脚式移動ロボット。
【請求項3】
複数の前記接地領域は、前記第二の関節に対して前後にわかれて配置されていることを特徴とする請求項2に記載の脚式移動ロボット。
【請求項4】
前記接地領域の少なくとも一つは、前記第二の関節から離れるにつれて上に向かって反っていることを特徴とする請求項1から請求項3のいずれか一項に記載の脚式移動ロボット。
【請求項5】
前記足平部は、前記接地領域として、接地時に前記床面との間で摩擦抵抗を生じる第一足底部材を備えていることを特徴とする請求項1から請求項4のいずれか一項に記載の脚式移動ロボット。
【請求項6】
前記板バネ部と前記第一足底部材との間に、前記第一足底部材の接地時に前記板バネ部の振動を減衰させる第一中間部材を備えていることを特徴とする請求項5に記載の脚式移動ロボット。
【請求項7】
前記第一中間部材は、前記第一足底部材の接地時に前記第一足底部材の前記板バネ部に対する床面方向の変位を許容することを特徴とする請求項6に記載の脚式移動ロボット。
【請求項8】
前記足平部は、前記第一足底部材よりも上方に、接地時に前記床面との間で摩擦抵抗を生じる第二足底部材を備えていることを特徴とする請求項5から請求項7のいずれか一項に記載の脚式移動ロボット。
【請求項9】
前記板バネ部と前記第二足底部材との間に、前記第二足底部材の接地時に前記板バネ部の振動を減衰させる第二中間部材を備えていることを特徴とする請求項8に記載の脚式移動ロボット。
【請求項10】
前記第二中間部材は、前記第二足底部材の接地時に前記第二足底部材の前記板バネ部に対する床面方向の変位を許容することを特徴とする請求項9に記載の脚式移動ロボット。
【請求項11】
前記足平部は、基部と、前記基部から下方にのび、底面側に前記接地領域が形成された複数の前記板バネ部と、を備えていることを特徴とする請求項1から請求項10のいずれか一項に記載の脚式移動ロボット。
【請求項12】
前記板バネ部を4個備え、そのうち2個の前記板バネ部は前記基部から前方にのび、かつ残りの2個の前記板バネ部は前記基部から後方にのびており、4個の前記板バネ部および前記基部が略H字状をなしていることを特徴とする請求項11に記載の脚式移動ロボット。
【請求項13】
前記板バネ部は、繊維で強化された複合部材から形成されていることを特徴とする請求項1から請求項12のいずれか一項に記載の脚式移動ロボット。
【請求項14】
前記板バネ部は、弾性率の異なる複数の層からなることを特徴とする請求項1から請求項13のいずれか一項に記載の脚式移動ロボット。
【請求項15】
前記板バネ部は、多層化された板バネと、前記板バネ間に介設された粘性部材と、から構成されることを特徴とする請求項1から請求項13のいずれか一項に記載の脚式移動ロボット。
【請求項16】
前記板バネ部の振動を減衰させる減衰手段を備えていることを特徴とする請求項1から請求項15のいずれか一項に記載の脚式移動ロボット。
【請求項17】
前記板バネ部が複数あり、2個の前記板バネ部を連結させる連結部を備えていることを特徴とする請求項1から請求項16のいずれか一項に記載の脚式移動ロボット。
【請求項18】
前記足部は、前記足平部を介して前記床面から作用する床反力を検出する床反力検出手段を備えていることを特徴とする請求項1から請求項17のいずれか一項に記載の脚式移動ロボット。
【請求項19】
前記床反力検出手段は、ユニット化された床反力検出器であることを特徴とする請求項18に記載の脚式移動ロボット。
【請求項20】
前記足平部は、前記床反力検出器に対して固定されていることを特徴とする請求項19に記載の脚式移動ロボット。
【請求項21】
前記足平部は、複数の前記接地領域を備えており、
前記第二の関節の中心は、平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に対してオフセットしており、
前記床反力検出器の中心は、前記第二の関節の中心よりも平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に近くなるように設けられていることを特徴とする請求項19または請求項20に記載の脚式移動ロボット。
【請求項22】
前記足平部は、複数の前記接地領域を備えており、
前記床反力検出器は、平面視で複数の前記接地領域の最遠点までの距離が最小となる位置に設けられていることを特徴とする請求項19または請求項20に記載の脚式移動ロボット。
【請求項23】
前記床反力検出手段は、前記板バネ部の歪みを検出する歪み検出手段であることを特徴とする請求項18に記載の脚式移動ロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2006−62057(P2006−62057A)
【公開日】平成18年3月9日(2006.3.9)
【国際特許分類】
【出願番号】特願2004−250418(P2004−250418)
【出願日】平成16年8月30日(2004.8.30)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成18年3月9日(2006.3.9)
【国際特許分類】
【出願日】平成16年8月30日(2004.8.30)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]