
脚式移動ロボット
【課題】胴体に可動脚を連結して構成された、優れた脚式移動ロボットを提供する。
【解決手段】胴体後方の上端に取っ手を配置し、歩行中や脚式作業中や暴走中には、オペレータは機体の後方からロボットを追いかけて、取っ手を把持することによって容易に捕まえることができる。また、取っ手を操作中に万一足部や腕部が暴走しても、取っ手を掴むオペレータの腕に危害を被る心配がない。また、取っ手の把持部分は緊急停止機構を兼ね備えており、オペレータが取っ手を把持することを検出すると、全身の関節アクチュエータを脱力させる。
【解決手段】胴体後方の上端に取っ手を配置し、歩行中や脚式作業中や暴走中には、オペレータは機体の後方からロボットを追いかけて、取っ手を把持することによって容易に捕まえることができる。また、取っ手を操作中に万一足部や腕部が暴走しても、取っ手を掴むオペレータの腕に危害を被る心配がない。また、取っ手の把持部分は緊急停止機構を兼ね備えており、オペレータが取っ手を把持することを検出すると、全身の関節アクチュエータを脱力させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、多数の関節自由度を持つロボットに係り、特に、胴体に可動脚を連結して構成された脚式移動ロボットに関する。
【背景技術】
【0002】
電気的若しくは磁気的な作用を用いて人間の動作に似せた運動を行う機械装置のことを「ロボット」という。ロボットの語源は、スラブ語の“ROBOTA(奴隷機械)”に由来すると言われている。わが国では、ロボットが普及し始めたのは1960年代末からであるが、その多くは、工場における生産作業の自動化・無人化などを目的としたマニピュレータや搬送ロボットなどの産業用ロボット(industrial robot)であった。
【0003】
最近では、イヌやネコのように4足歩行の動物の身体メカニズムやその動作を模したペット型ロボット、あるいは、ヒトのような2足直立歩行を行う動物の身体メカニズムや動作をモデルにしてデザインされた「人間形」若しくは「人間型」と呼ばれるロボット(humanoid robot)など、脚式移動ロボットに関する研究開発が進展し、実用化への期待も高まってきている。
【0004】
ヒトの生体メカニズムや動作をエミュレートした脚式移動ロボットのことを、特に、「人間形」、若しくは「人間型」のロボット(humanoid robot)と呼ぶ。人間型ロボットは、例えば、生活支援、すなわち住環境その他の日常生活上の様々な場面における人的活動の支援などを行うことができる。
【0005】
脚式移動ロボットの用途の1つとして、産業活動・生産活動等における各種の難作業の代行が挙げられる。例えば、原子力発電プラントや火力発電プラント、石油化学プラントにおけるメンテナンス作業、製造工場における部品の搬送・組立作業、高層ビルにおける清掃、火災現場その他における救助といったような危険作業・難作業の代行などである。
【0006】
また、脚式移動ロボットの他の用途として、上述の作業支援というよりも、生活密着型、すなわち人間との「共生」あるいは「エンターティンメント」という用途が挙げられる。この種のロボットは、ヒトあるいはイヌ(ペット)、クマなどの比較的知性の高い脚式歩行動物の動作メカニズムや四肢を利用した豊かな感情表現を忠実に再現する。また、あらかじめ入力された動作パターンを単に忠実に実行するだけではなく、ユーザ(あるいは他のロボット)から受ける言葉や態度(「褒める」とか「叱る」、「叩く」など)に対して動的に対応した、生き生きとした応答表現を実現することも要求される。
【0007】
従来の玩具機械は、ユーザ操作と応答動作との関係が固定的であり、玩具の動作をユーザの好みに合わせて変更することはできない。この結果、ユーザは同じ動作しか繰り返さない玩具をやがては飽きてしまうことになる。これに対し、インテリジェントなロボットは、対話や機体動作などからなる行動を自律的に選択することから、より高度な知的レベルでリアリスティックなコミュニケーションを実現することが可能となる。この結果、ユーザはロボットに対して深い愛着や親しみを感じる。
【発明の開示】
【発明が解決しようとする課題】
【0008】
ヒューマノイドのような2足歩行のロボットは、重心位置が高く、歩行時などの立位姿勢での姿勢は不安定である。このため、2足歩行ロボットに関する研究の多くは、立位姿勢における姿勢安定制御に向けられている。言い換えれば、機体の他の部位に関して明確な設計手法を提案するものは少ない。
【0009】
例えば胴体部は、機体の中心に配置され、充分な容積を持つとともに、脚部や腕部などの可動肢を連結しており、機体の構成上重要な役割を果たすべきと思料されるが、そのデザインに関する明確な指針はあまりない。
【0010】
本発明は上述したような技術的課題を鑑みたものであり、その目的は、胴体に可動脚を連結して構成された、優れた脚式移動ロボットを提供することにある。
【課題を解決するための手段】
【0011】
本発明は、上記課題を参酌してなされたものであり、その第1の側面は、胴体と前記胴体に連結された可動脚を備えた脚式移動ロボットであって、
前記可動脚は前記胴体に対してロール軸及びピッチ軸回りの複合的な自由度を持ち、前記胴体と前記可動脚の連結部分において、
前記可動脚に固定された腰部カバー体と、
前記可動脚に対して前記ロール軸回りにのみ回転可能に取り付けられた第1の連結カバー体と、
前記第1の連結カバー体に対して前記ピッチ軸回りに回転可能であるとともに前記可動脚に対して前記ロール軸及び前記ピッチ軸回りに回転可能に取り付けられた1以上の第2の連結カバー体と、
前記第1の連結カバー体に対して前記ピッチ軸回りに回転可能であるとともに前記可動脚に対して前記ロール軸及び前記ピッチ軸回りに回転可能に取り付けられて前記胴体を被覆する胴体カバー体と、
を具備することを特徴とする脚式移動ロボットである。
【0012】
本発明に係る脚式移動ロボットは、前記可動脚は前記胴体に対してロール軸及びピッチ軸回りの複合的な自由度を備えている。このような場合、胴体と脚部の連結部は相当程度の可動領域を持つことになるため、駆動時に機体の外殻の隙間が生じないように、機体内部を隠蔽するカバー構造を工夫する必要がある。
【0013】
本発明によれば、腰部カバー体と、第1の連結カバー体と、第2の連結カバー体と、胴体カバー体という4種類のカバーを用いて、胴体部と可動脚の連結部分並びに体幹部において、体幹ロール軸回りの駆動時において、体幹ピッチ軸回りの自由度を制限することなく、且つ、体幹ピッチ軸回りの駆動時において、体幹ロール軸回りの自由度を制限することなく、胴体が体幹部において前屈しながらさらに体幹部において左右方向に揺動するという各自由度における最大限の可動範囲において、内部構造を隠蔽することができる。
【0014】
また、本発明の第2の側面は、胴体と前記胴体に連結された可動脚を備え、前記可動脚は所定の歩行方向に歩行動作を行なう脚式移動ロボットであって、
前記胴体の前記歩行方向の反対側の面の略上端縁に把持部を備える、
ことを特徴とする脚式移動ロボットである。
【0015】
本発明の第2の側面に係る脚式移動ロボットは、運搬・格納時の操作性の観点から、オペレータが機体を掴んで持ち上げるための把持部が用意されている。
【0016】
この把持部は、胴体後方の上端に配設されており、歩行中や脚式作業中、さらには暴走中であっても、オペレータは機体の後方からロボットを追いかけて、把持部を用いて容易に捕まえることができる。また、脚部や腕部などの主要な可動部は基本的に機体前方に向かう関節自由度を与えられているので、把持部を操作中に万一足部や腕部が暴走しても、オペレータの腕にぶつかったりして危害を被る心配が少ない。
【0017】
例えば仰向けなどの床上姿勢においては、把持部は床面側を向いてしまうので、オペレータの手が届きにくくなる。本発明によれば、把持部は、前記胴体が前記歩行方向の反対側の面において接地した床上姿勢において、床面との間に所定の間隙を持っているので、オペレータは容易に把持部に手を入れることができる。
【0018】
また、オペレータが把持部を掴むためには、機体の後方に回り込む格好となるので、オペレータの手や姿がカメラなどの視覚認識部の視野に入って、機体の行動計画などに影響を与えることはない。
【0019】
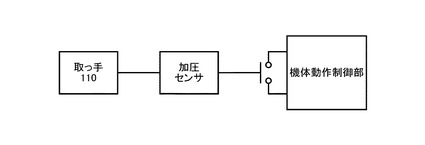
また、把持部は、暴走時などにおけるロボットの緊急停止機構を兼ねている。把持部の把持部分には、加圧センサが貼設されており、オペレータが把持部を掴んでいることを検出すると、この検出結果に応答して、機体の動作制御部は、全身の関節アクチュエータを脱力させるという脱力機構を備えている。例えば、各関節アクチュエータに最低ゲインを設定したり、出力トルクを最小値に設定することにより、脱力状態を実現することができる。あるいは、すべての又は一部の関節アクチュエータへの給電を停止することによっても、脱力状態を実現することができる。
【0020】
把持部の操作に応答して脱力オペレーションを行なうので、機体を運搬中にロボットが突然暴走しても、オペレータを怪我させることはない。また、把持部を掴むことによって機体動作が緊急停止しても、機体は把持部で支持されているので、ロボットが転倒する危険もない。
【0021】
また、本発明の第3の側面は、胴体と前記胴体に連結された可動脚を備えた脚式移動ロボットであって、
前記胴体の正面にて開閉操作可能に取り付けられた正面カバーと、
前記胴体の正面カバーで被覆される内側に配設された内部アクセス手段と、
を具備することを特徴とする脚式移動ロボットである。
【0022】
本発明の第3の側面に係る脚式移動ロボットは、胴体を利用して内部アクセス手段を実現している。より具体的には、胴体正面にPCカード・スロット、メモリ・スティック用スロット、バッテリ収容口などを配設して、内部アクセスを可能にしている。さらに、正面カバーを取り付けて、通常動作時にはこれらを外界から隠蔽して、機体デザイン上の美観を整えるとともに、機体オペレーション時の脱落防止や取り外し禁止を実現する。
【0023】
このような内部アクセス手段に装着されている部品類が機体動作中に突発的に取り外されると、機器の誤動作や破損を引き起こしかねない。例えば、主電源であるバッテリ・パックが抜き取られると、ロボットは姿勢維持用あるいは姿勢安定制御の駆動電力を失ってしまう。また、メモリ・アクセス中にメモリ・スティックやPCカードが抜き取られると、実行中の動作の次の処理ステップを失うことから、誤動作や暴走の危険がある。
【0024】
そこで、本発明によれば、機体オペレーション中は正面カバーの開成操作を禁止する手段を備え、機体オペレーション中におけるこれら装着部品類の取り外しや交換を制限するようにしている。
【発明の効果】
【0025】
本発明によれば、胴体に可動脚を連結して構成された、優れた脚式移動ロボットを提供することができる。
【0026】
本発明によれば、機体の中心に配置され、充分な容積を持つとともに、脚部や腕部などの可動肢を連結している胴体のデザインに関する明確な指針を得ることができる。
【0027】
本発明のさらに他の目的、特徴や利点は、後述する本発明の実施形態や添付する図面に基づくより詳細な説明によって明らかになるであろう。
【発明を実施するための最良の形態】
【0028】
以下、図面を参照しながら本発明の実施形態について詳解する。
【0029】
A.脚式移動ロボットの機械的構成
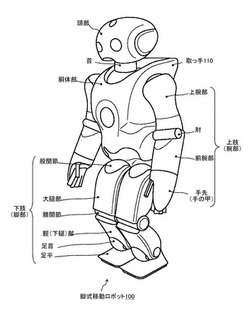
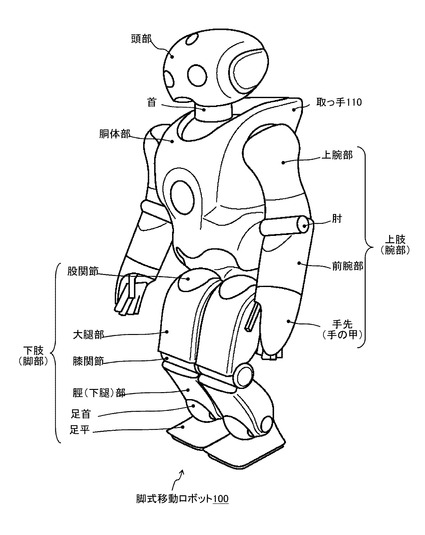
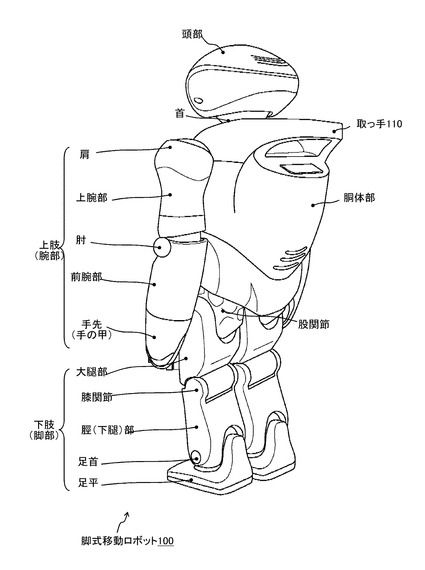
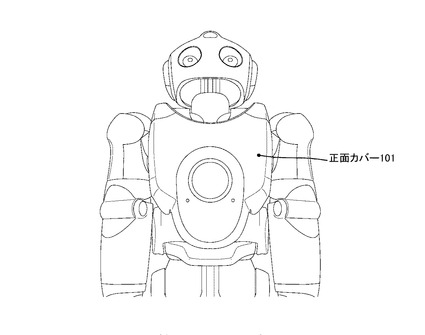
図1及び図2には本発明の実施に供される「人間形」又は「人間型」の脚式移動ロボット100が直立している様子を前方及び後方の各々から眺望した様子を示している。図示の通り、脚式移動ロボット100は、胴体部と、頭部と、左右の上肢部と、脚式移動を行う左右2足の下肢部とで構成され、例えば胴体に内蔵されている制御部(図示しない)により機体の動作を統括的にコントロールするようになっている。
【0030】
左右各々の下肢は、大腿部と、膝関節と、脛部と、足首と、足平とで構成され、股関節によって体幹部の略最下端にて連結されている。また、左右各々の上肢は、上腕と、肘関節と、前腕とで構成され、肩関節によって体幹部の上方の左右各側縁にて連結されている。また、頭部は、首関節によって体幹部の略最上端中央に連結されている。
【0031】
制御部は、この脚式移動ロボット100を構成する各関節アクチュエータの駆動制御や各センサ(後述)などからの外部入力を処理するコントローラ(主制御部)や、電源回路その他の周辺機器類を搭載した筐体である。制御部は、その他、遠隔操作用の通信インターフェースや通信装置を含んでいてもよい。
【0032】
このように構成された脚式移動ロボット100は、制御部による全身協調的な動作制御により、2足歩行を実現することができる。かかる2足歩行は、一般に、以下に示す各動作期間に分割される歩行周期を繰り返すことによって行われる。すなわち、
【0033】
(1)右脚を持ち上げた、左脚による単脚支持期
(2)右足が接地した両脚支持期
(3)左脚を持ち上げた、右脚による単脚支持期
(4)左足が接地した両脚支持期
【0034】
脚式移動ロボット100における歩行制御は、あらかじめ下肢の目標軌道を計画し、上記の各期間において計画軌道の修正を行うことによって実現される。すなわち、両脚支持期では、下肢軌道の修正を停止して、計画軌道に対する総修正量を用いて腰の高さを一定値で修正する。また、単脚支持期では、修正を受けた脚の足首と腰との相対位置関係を計画軌道に復帰させるように修正軌道を生成する。
【0035】
歩行動作の軌道修正を始めとして、機体の姿勢安定制御には、一般に、ZMPに対する偏差を小さくするための位置、速度、及び加速度が連続となるように、5次多項式を用いた補間計算により行う。ZMP(Zero Moment Point)を歩行の安定度判別の規範として用いている。ZMPによる安定度判別規範は、歩行系から路面には重力と慣性力、並びにこれらのモーメントが路面から歩行系への反作用としての床反力並びに床反力モーメントとバランスするという「ダランベールの原理」に基づく。力学的推論の帰結として、足底接地点と路面の形成する支持多角形(すなわちZMP安定領域)の辺上あるいはその内側にピッチ軸及びロール軸モーメントがゼロとなる点、すなわち「ZMP(Zero Moment Point)」が存在する。
【0036】
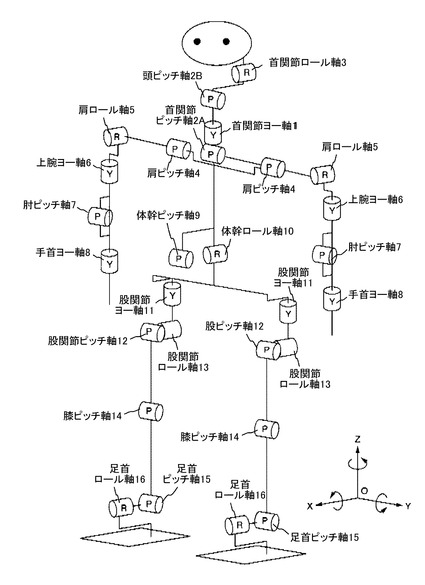
図3には、この脚式移動ロボット100が具備する関節自由度構成を模式的に示している。同図に示すように、脚式移動ロボット100は、2本の腕部と頭部1を含む上肢と、移動動作を実現する2本の脚部からなる下肢と、上肢と下肢とを連結する体幹部とで構成された、複数の肢を備えた構造体である。
【0037】
頭部を支持する首関節(Neck)は、首関節ヨー軸1と、第1及び第2の首関節ピッチ軸2A及び2Bと、首関節ロール軸3という4自由度を有している。
【0038】
また、各腕部は、その自由度として、肩(Shoulder)における肩関節ピッチ軸4と、肩関節ロール軸5と、上腕ヨー軸6、肘(Elbow)における肘関節ピッチ軸7と、手首(Wrist)における手首関節ヨー軸8と、手部とで構成される。手部は、複数本の指を含む多関節・多自由度構造体であるが、その詳細については後に詳解する。
【0039】
また、体幹部(Trunk)は、体幹ピッチ軸9と、体幹ロール軸10という2自由度を有する。
【0040】
また、下肢を構成する各々の脚部は、股関節(Hip)における股関節ヨー軸11と、股関節ピッチ軸12と、股関節ロール軸13と、膝(Knee)における膝関節ピッチ軸14と、足首(Ankle)における足首関節ピッチ軸15と、足首関節ロール軸16と、足部とで構成される。
【0041】
B.脚式移動ロボットの胴体構造
B−1.腰部構造
本実施形態に係る脚式移動ロボット100は、上半身においても豊かな関節自由度を備え、より自然でリアリスティックな機体動作を実現することができる。
【0042】
例えば、図3に示すように、股関節ピッチ軸12及び体幹ピッチ軸9を備え、前屈動作を行なうことができる。さらに、股関節ロール軸13及び体幹ロール軸10を備え、立脚に対して胴体を左右方向に揺動させることができる。また、腰部において、股関節と体幹の双方において、ピッチ軸及びロール軸の自由度を持つことから、これら4つの関節自由度を用いた複合的な動作により、胴体と脚部の連結部は相当程度の可動領域を持つ。
【0043】
他方、各関節部位においては、可動角を確保しながら機体の内部構造を隠蔽する必要がある。何故ならば、駆動時に機体の外殻の隙間が生じると、ユーザの指の挟み込みや、隙間からの異物混入による故障の原因となりかねないからである。
【0044】
1つの関節部位において単一の関節自由度しか備えていない場合には、当該自由度に沿って出現するカバー構造を設けることによって、可動角を確保しながら機体の内部構造を容易に隠蔽することができる。これに対し、2以上の関節自由度を備える場合には、一方の関節軸の駆動時に、他方の関節軸の自由度を制限することなく、内部構造の隠蔽する機構は容易ではない。
【0045】
本実施形態に係る脚式移動ロボット100の場合、上述したように、股関節並びに体幹部においてピッチ軸及びロール軸の2方向の自由度を持つとともに、各軸回りの駆動を同時に行うという複合的な動作を行なうことから、隠蔽機構もこれに対応しなければならない。
【0046】
まず、脚式移動ロボット100の股関節並びに体幹部における複合的な自由度構成について、図4〜図8、並びに図29を参照しながら説明する。
【0047】
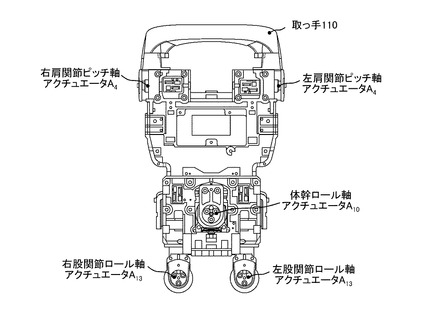
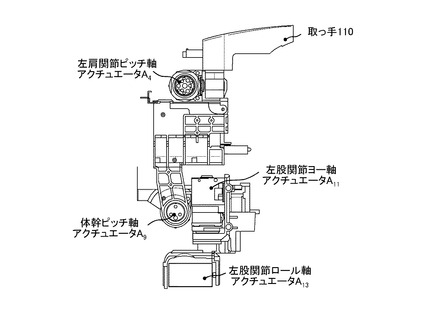
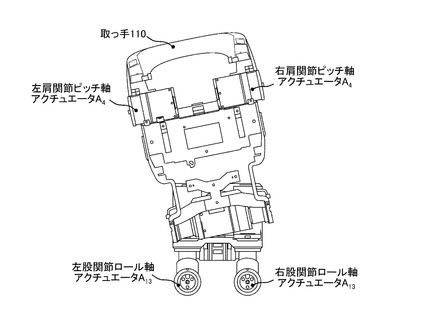
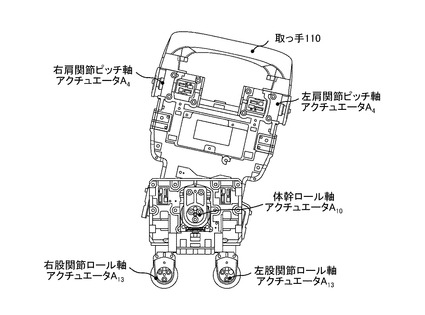
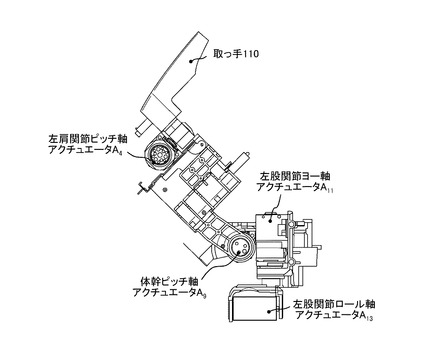
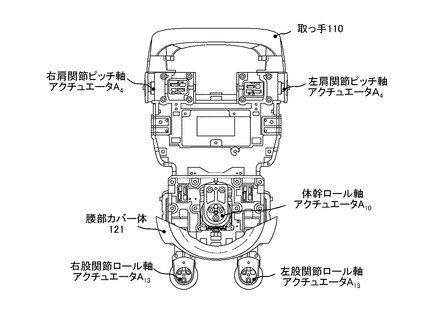
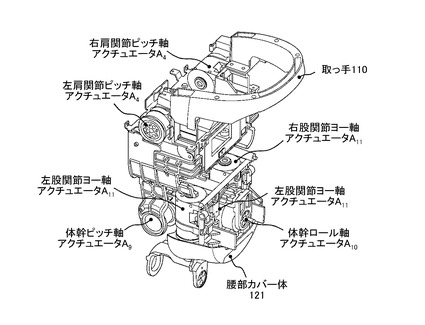
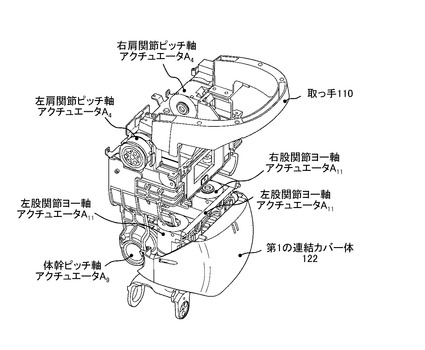
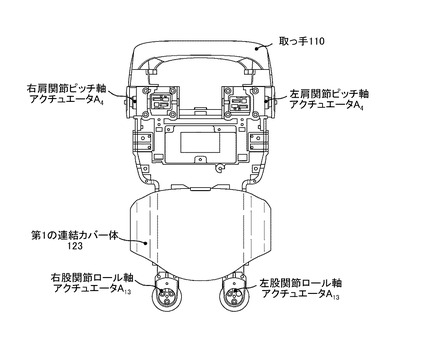
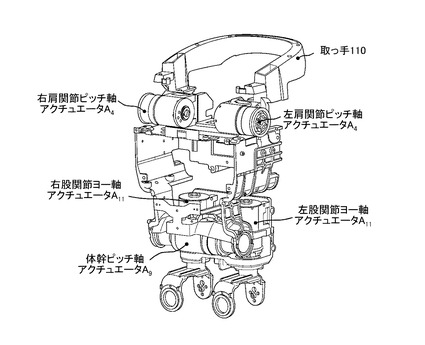
図4及び図5、図29には、外筐(外殻若しくはカバー)を取り外して、内部構造を露出した状態の胴体の背面図、左側面図、並びに左正面斜視図をそれぞれ示している。図4並びに図5に示すように、本実施形態に係る脚式移動ロボット100の胴体部には、左右の腕部を連結並びに駆動するための左右の肩関節ピッチ軸アクチュエータA4と、胴体部を体幹付近において左右方向に揺動させるための体幹ロール軸アクチュエータA10と、胴体部を体幹付近において前後方向の屈曲すなわち前屈動作を可能にするための体幹ピッチ軸アクチュエータA9と、左右の脚部を連結してヨー軸回りの回転すなわち足部の向きを与えるための股関節ヨー軸アクチュエータA11と、左右の足部を連結してそれぞれに対して左右方向の揺動運動を与えるための股関節ロール軸アクチュエータA13が搭載されている。また、胴体後方の略上端縁には取っ手110が形設されている(後述)。
【0048】
図6及び図7には、体幹ロール軸アクチュエータA10の駆動により、胴体部が体幹部において右方向に揺動している様子を、正面並びに背面からそれぞれ示している。さらに、図8には、体幹ピッチ軸アクチュエータA9の駆動により、胴体部が体幹部において前屈している様子を示している。
【0049】
このように、本実施形態に係る脚式移動ロボット100は、体幹部においてピッチ軸及びロール軸の2方向の自由度を持つとともに、各軸回りの駆動を同時に行うという複合的な動作を行なうことができる。このような場合、胴体が体幹部において前屈しながらさらに体幹部において左右方向に揺動するという各自由度における最大限の可動範囲において、一方の関節軸の駆動時に、他方の関節軸の自由度を制限することなく、内部構造の隠蔽する必要がある。例えば、体幹ロール軸10回りの駆動時において、体幹ピッチ軸9回りの自由度を制限することなく、内部構造を隠蔽しなければならない。同様に、体幹ピッチ軸9回りの駆動時において、体幹ロール軸10回りの自由度を制限することなく、内部構造を隠蔽しなければならない。
【0050】
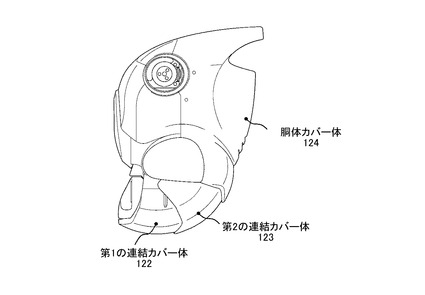
本実施形態では、腰部カバー体121と、第1の連結カバー体122と、第2の連結カバー体123と、胴体カバー体124という4種類のカバーを用いて、胴体部と可動脚の連結部分並びに体幹部において、体幹ロール軸10回りの駆動時において、体幹ピッチ軸9回りの自由度を制限することなく、且つ、体幹ピッチ軸9回りの駆動時において、体幹ロール軸10回りの自由度を制限することなく、胴体が体幹部において前屈しながらさらに体幹部において左右方向に揺動するという各自由度における最大限の可動範囲において、内部構造を隠蔽することとした。
【0051】
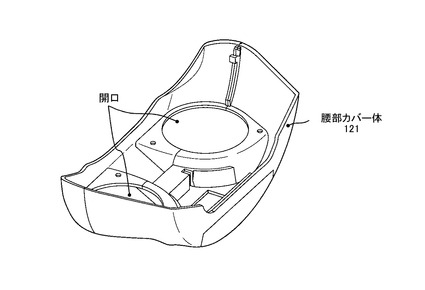
図9には、腰部カバー体121を斜視した様子を示している。この腰部カバー体121は、胴体の下端を覆う断面略U字形の成型体であり、その底面において左右の可動脚の股関節ヨー軸アクチュエータA11を挿通するための開口が形設されている。腰部カバー体121の背面側は、体幹ロール軸10回りの回転に倣った曲面が形設されている。
【0052】
また、図10及び図11には、この腰部カバー体121を図4〜図6に示した脚式移動ロボット100の胴体に取り付けた様子を示している。股関節カバー体121は、左右の可動脚の股関節ヨー軸アクチュエータA11を挿通しており、左右の可動脚に固定された格好となり、体幹ピッチ軸9及び体幹ロール軸10のいずれの動作にも影響されない。
【0053】
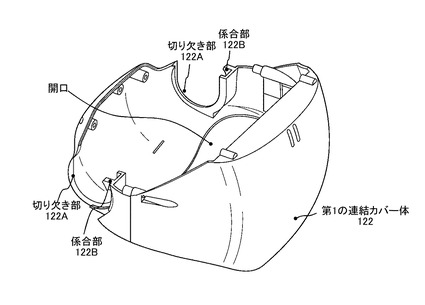
図12には、第1の連結カバー体122を斜視した様子を示している。第1の連結カバー体122は、上記の腰部カバー体121の直近上位のカバーであり、その底面には腰部カバー体121を収容するための開口を持つ略筒状の構造体である。また、第1の連結カバー体122の背面側には、腰部カバー体121の背面に倣った、体幹ロール軸10回りの略回転形状の曲面が形設されている。この第1の連結カバー体122の左右の各側面において体幹ピッチ軸9回りの動作を開放するための切り欠き部122Aが形設されている。また、この切り欠き部122Aの端縁には、胴体フレーム側と係合するための係合部122Bが設けられている。
【0054】
図13には、この第1の連結カバー体122を図4〜図6に示した脚式移動ロボット100の胴体に取り付けた様子を示している。第1の連結カバー体122は、その底面において腰部カバー体121を挿通するとともに、左右の切り欠き部122Bにおいて体幹ピッチ軸9の動作を開放していることから、左右の可動脚に対して体幹ロール軸10回りの自由度のみが与えられており、体幹ピッチ軸9の動作に影響されない。
【0055】
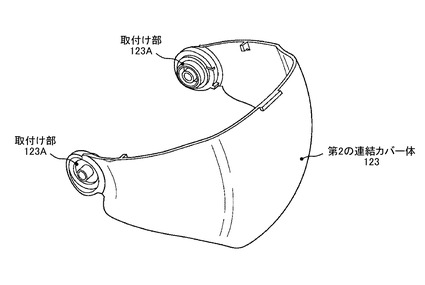
図14には、第2の連結カバー体123を斜視した様子を示している。第2の連結カバー体123は、上記の第1の連結カバー体122の直近上位のカバーであり、第1の連結カバー体122の背面に倣った体幹ロール軸10回りの略回転形状の曲面が形設されている略U字形状の成型体である。このU字の左右の略先端縁には、体幹ピッチ軸9に対して回動可能に支持される取付け部123Aが配設されている。
【0056】
図15には、この第2の連結カバー体123を図4〜図6に示した脚式移動ロボット100の胴体に取り付けた様子を示している。第2の連結カバー体123は、その底面において第1の連結カバー体122を挿通するとともに、左右の取付け部123Bにおいて体幹ピッチ軸9回りに回動可能に支持されていることから、左右の可動脚に対して体幹ピッチ軸9及び体幹ロール軸10回りの自由度が与えられている。
【0057】
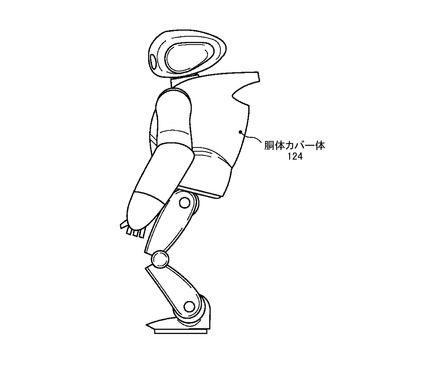
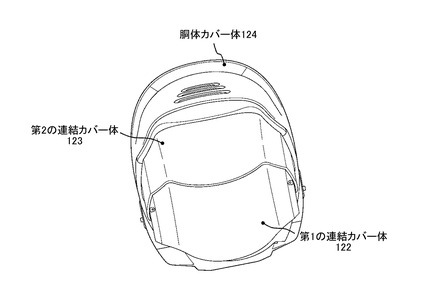
図16には、さらに胴体カバー体124を図4〜図6に示した脚式移動ロボット100の胴体に取り付けた様子を示している。胴体カバー体124は、その底面において第2の連結カバー体123を挿通するとともに、左右の腕部を取り付けていることから、体幹部より上側の胴体と一体的に動くとともに、左右の可動脚に対しては、体幹ピッチ軸9及び体幹ロール軸10回りの自由度が与えられている。
【0058】
図17には、本実施形態に係る脚式移動ロボット100が基本的な立位姿勢をとっている様子を示している。この状態では、第1の連結カバー体122並びに第2の連結カバー体123は、胴体カバー体124内に収容されていて、外界からは隠れている。
【0059】
また、図18には、脚式移動ロボット100が体幹ピッチ軸9回りの駆動により前屈している様子を示している。
【0060】
上述したように、第1の連結カバー体122は、左右の可動脚に対しては、体幹ロール軸10回りの自由度しか与えられておらず、図示のような体格ピッチ軸9回りの動作には追従せず、可動脚に対して同じ相対位置関係でとどまる。これに対し、第2の連結カバー体123並びに胴体カバー体124はいずれも、可動脚に対して体幹ピッチ軸9回りの回転自由度が与えられている。したがって、体幹ピッチ軸9回りの駆動により前屈姿勢をとった場合には、それぞれ可動脚に対して体幹ピッチ軸9回りに動作する。この結果、図示のように、胴体カバー体124内に収容されていた第1の連結カバー体122及び第2の連結カバー体123が出現して、腰部を覆い尽くす。すなわち、体幹ピッチ軸9回りの最大限の可動範囲において、機体の内部構造を隠蔽することができる。
【0061】
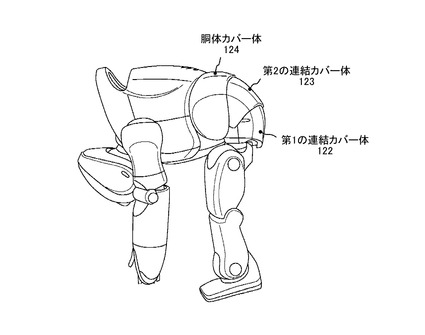
図19には、上述したような前傾姿勢において、さらに体幹ロール軸10回りの駆動により脚に対し左側に揺動しているときに各連結カバー体122及び123が動作する様子を背面側から示している。また、図28には、上述したような前傾姿勢において、さらに体幹ロール軸10回りの駆動により脚に対し左側に揺動しているときの脚式移動ロボット100の様子を背面側から示している。
【0062】
上述したように、第1の連結カバー体122は、左右の可動脚に対しては、体幹ロール軸10回りの自由度のみが与えられている。また、第2の連結カバー体123並びに胴体カバー体124はいずれも、可動脚に対して体幹ピッチ軸9及び体幹ロール軸10双方の回転自由度が与えられている。したがって、既に胴体カバー体124から出現している第1の連結カバー体122及び第2の連結カバー体123は、胴体カバー体124とともに、可動脚に対して体幹ロール軸10回りに作動して、機体の内部構造を隠蔽することができる。このとき、体幹ロール軸10回りの駆動時において、体幹ピッチ軸9回りの自由度を制限することなく、内部構造を隠蔽している、ということを充分に理解されたい。
【0063】
B−2.機体の運搬・格納
脚式移動ロボット100も、他の機械装置と同様、未使用時には運搬したり所定の保管場所に格納する必要がある。機械装置の多くは、運搬・格納時の操作性の観点から、ハンドル若しくは取っ手が用意されている。
【0064】
自律作業を行なう脚式移動ロボット100にハンドルを取り付ける際、以下の事柄に留意しながら設計すべきであると本発明者らは思料する。
【0065】
(1)立ち姿勢、床上姿勢(仰向け、うつ伏せ)などいずれの姿勢であっても把持し易いこと。
(2)歩行中など脚式作業中、さらには暴走中であっても把持し易いこと。
(3)ハンドルで把持している最中にロボットが突然暴走しても、オペレータを怪我させないこと。
(4)歩行中など脚式作業中にハンドルを掴もうとしても、ロボットが転倒する危険がないこと。
(5)ハンドルを掴もうとするオペレータの手や姿がカメラなどの視覚認識部の視野に入って、機体の行動計画などに影響を与えないこと。
【0066】
このような配慮から、本実施形態に係る脚式移動ロボット100は、胴体後方の略上端縁に取っ手110が形設されている(図1及び図2を参照のこと)。
【0067】
胴体後方の上端に取っ手110を配置することによって、歩行中や脚式作業中、さらには暴走中であっても、オペレータは機体の後方からロボットを追いかけて、取っ手110を把持することによって容易に捕まえることができる。また、脚部や腕部などの主要な可動部は基本的に機体前方に向かう関節自由度を与えられているので、取っ手110を操作中に万一足部や腕部が暴走しても、取っ手110を掴むオペレータの腕にぶつかったりして危害を被る心配が少ない。
【0068】
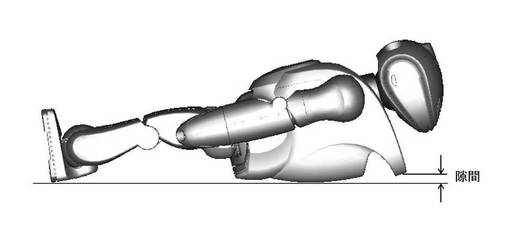
例えば仰向けなどの床上姿勢においては、取っ手110は床面側を向いてしまうので、オペレータの手が届きにくくなる。本実施形態では、図20に示すように、取っ手110を背中よりも低く形成することにより、仰向け姿勢においても取っ手110と床面の間には間隙が設けられ、オペレータは容易に取っ手110に手を入れることができる。
【0069】
また、オペレータが取っ手110を掴むためには、機体の後方に回り込む格好となるので、オペレータの手や姿がカメラなどの視覚認識部の視野に入って、機体の行動計画などに影響を与えることはない。
【0070】
本実施形態では、取っ手110は、暴走時などにおけるロボットの緊急停止機構を兼ねている。取っ手110の把持部分には、加圧センサが貼設されており、オペレータが取っ手110を把持することを検出すると、この検出結果に応答して、機体の動作制御部は、全身の関節アクチュエータを脱力させるという脱力機構を備えている(図21を参照のこと)。例えば、各関節アクチュエータに最低ゲインを設定したり、出力トルクを最小値に設定することにより、脱力状態を実現することができる。あるいは、すべての又は一部の関節アクチュエータへの給電を停止することによっても、脱力状態を実現することができる。
【0071】
取っ手110のハンドル操作に応答して脱力オペレーションを行なうので、機体を運搬中にロボットが突然暴走しても、オペレータを怪我させることはない。また、取っ手110を掴むことによって機体動作が緊急停止しても、機体は取っ手110で支持されているので、ロボットが転倒する危険もない。
【0072】
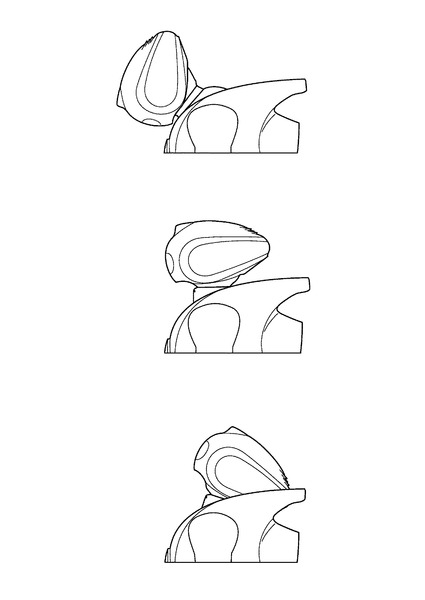
また、取って110の他の用途として、後頭部の保護を挙げることができる。図3に示したように、本実施形態に係る脚式移動ロボットは、第1及び第2の首関節ピッチ軸2A及び2Bを備え、両ピッチ軸の駆動により、頭部は機体の前後方向に対して広い可動範囲を備えている。
【0073】
図21には、頭部が機体の前後方向に動作する様子を示している。図示の通り、頭部は、頭を前にもたげたような前方位置と、頭が正面を向くような基本位置と、頭を胴体後方に垂らしたような後方位置を備えている。この後方位置において、後頭部は取っ手110が定義する最後端位置よりも内側に収容されている。
【0074】
例えば、機体が後方に転倒した場合、床面との衝突時に受ける外力のために、第1及び第2の首関節ピッチ軸2A及び2Bが受動的に動作してしまい、元の姿勢に拘わらず頭部が後方位置に移動してしまう。このとき、後頭部が床面に衝突してしまうと、頭部や首関節ピッチ軸アクチュエータが破損してしまう危険がある。これに対し、本実施形態では、図21に示すように、後頭部は取っ手110が定義する最後端位置によって保護されている。
【0075】
B−3.機体への内部アクセス
多くの情報機器類は、機器内部へのアクセス手段を備えている。例えば、カード・スロットやコネクタなどを持ち、外部記憶装置やその他の機能拡張用の周辺装置を収容したり接続する。また、バッテリ駆動の機器においては、バッテリの取り外し、交換作業が必須となっている。
【0076】
本実施形態に係る脚式移動ロボット100は、胴体を利用して内部アクセス機構を実現している。より具体的には、胴体正面にPCカード・スロット、メモリ・スティック用スロット、バッテリ収容口などを配設して、内部アクセスを可能にしている。さらに、正面カバーを取り付けて、通常動作時にはこれらを外界から隠蔽して、機体デザイン上の美観を整えるとともに、機体オペレーション時の脱落防止や取り外し禁止を実現する。
【0077】
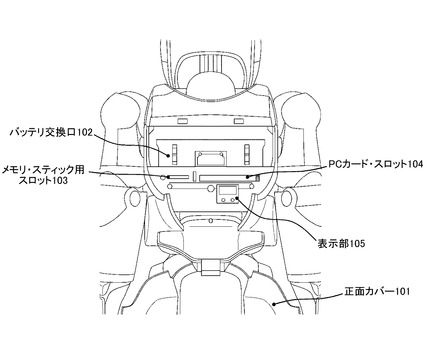
図23には、正面カバー101を閉じた状態の胴体正面を示している。また、図24には、正面カバー101を開いた状態の胴体正面を示している。さらに、図25には、正面カバー101を開いた状態の胴体側面を示している。各図に示すように、正面カバー101は、その略下端縁にて胴体正面側に対して回動自在にヒンジ結合されており、胴体に対する開閉操作が可能となっている。また、正面カバー101の内側の略上端には、ラッチなどの係止部(図示しない)が配設されており、正面カバー101の閉成時には胴体正面側の対応部位と係合して、閉成状態を維持するようになっている。
【0078】
図24に示すように、正面カバー101で覆われている胴体正面には、バッテリ交換口102と、メモリ・スティック用スロット103と、PCカード・スロット104などの内部アクセス手段が用意されている。
【0079】
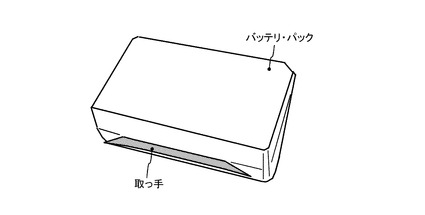
バッテリ交換口102には、機体の駆動用電源としてのバッテリ・パックを着脱可能に収容することができる。本実施形態において使用されるバッテリ・八苦には、このバッテリ交換口102に対する交換操作を用意するための取っ手が取り付けられている(図26を参照のこと)。また、メモリ・スティック用スロット103には、機体の動作制御用のプログラムや機体の動作パターンを記述したモーション・データなどを格納したメモリ・スティックを交換可能に挿入することができる。ロボット本体側では、メモリ・スティックからこれらプログラムやモーション・データをインストールしたり、あるいはメモリ・スティックからメイン・メモリにロードして機体動作を実行する。また、PCカード・スロット104には、メモリ・カードやハード・ディスク・カード、無線LANカードなどPCMCIA/JEIDAにおいて規定された使用に従う各種のPCカードを交換可能に挿入することができる。その他、機体の内部状態などをインジケートするための表示部105も配設されている。
【0080】
このような内部アクセス手段に装着されている部品類が機体動作中に突発的に取り外されると、機器の誤動作や破損を引き起こしかねない。例えば、主電源であるバッテリ・パックが抜き取られると、ロボットは姿勢維持用あるいは姿勢安定制御の駆動電力を失ってしまう。また、メモリ・アクセス中にメモリ・スティックやPCカードが抜き取られると、実行中の動作の次の処理ステップを失うことから、誤動作や暴走の危険がある。
【0081】
本実施形態では、正面カバー101は、機体オペレーション中におけるこれら装着部品類の取り外しや交換を制限する機能を持つ。すなわち、機体オペレーション中は正面カバー101の開成操作が禁止され、バッテリやメモリ・スティックの抜去を行なえなくする。
【0082】
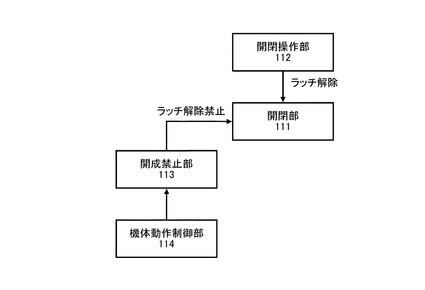
図27には、部品類の交換作業を禁止するための機能構成を模式的に示している。
【0083】
開閉部111は、胴体に対して回動自在にヒンジ結合された正面カバー101からなる。この開閉部111の他端には、ラッチなどの係止部が配設されており、開閉操作部112はユーザ操作に応答してこのラッチを解除する。
【0084】
開成禁止部113は、例えばソレノイドなどの部品で構成され、開閉操作部112へのユーザ操作に係らず、ラッチの解除を禁止して、開閉部111が開かないようにする。機体動作をコントロールする機体動作制御部114が稼動中はこの開成禁止部113が付勢されて、開閉部111が開かない。この結果、内部に収容されているバッテリやメモリ・スティックなどの部品の取り外しが禁止される。
【産業上の利用可能性】
【0085】
以上、特定の実施例を参照しながら、本発明について詳解してきた。しかしながら、本発明の要旨を逸脱しない範囲で当業者が該実施例の修正や代用を成し得ることは自明である。
【0086】
本発明の要旨は、必ずしも「ロボット」と称される製品には限定されない。すなわち、電気的若しくは磁気的な作用を用いて人間の動作に似せた運動を行う機械装置であるならば、例えば玩具等のような他の産業分野に属する製品であっても、同様に本発明を適用することができる。
【0087】
要するに、例示という形態で本発明を開示してきたのであり、本明細書の記載内容を限定的に解釈するべきではない。本発明の要旨を判断するためには、特許請求の範囲の記載を参酌すべきである。
【図面の簡単な説明】
【0088】
【図1】本発明の実施に供される脚式移動ロボットが直立している様子を前方から眺望した様子を示した図である。
【図2】本発明の実施に供される脚式移動ロボットが直立している様子を後方から眺望した様子を示した図である。
【図3】脚式移動ロボットが具備する関節自由度構成を模式的に示した図である。
【図4】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【図5】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【図6】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【図7】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【図8】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【図9】腰部カバー体121の斜視図である。
【図10】腰部カバー体121を図4〜図5に示した脚式移動ロボット100の胴体に取り付けた様子を示した背面図である。
【図11】腰部カバー体121を図4〜図5に示した脚式移動ロボット100の胴体に取り付けた様子を示した斜視図である。
【図12】第1の連結カバー体122を斜視した様子を示した図である。
【図13】第1の連結カバー体122を図4〜図5に示した脚式移動ロボット100の胴体に取り付けた様子を示した斜視図である。
【図14】第2の連結カバー体123を斜視した様子を示した図である。
【図15】第2の連結カバー体123を図4〜図5に示した脚式移動ロボット100の胴体に取り付けた様子を示した背面図である。
【図16】胴体カバー体124を図4〜図5に示した脚式移動ロボット100の胴体に取り付けた様子を示した図である。
【図17】本実施形態に係る脚式移動ロボット100が基本的な立位姿勢をとっている様子を示した左側面図である。
【図18】体幹ピッチ軸9回りの駆動により脚式移動ロボット100が前屈した様子を示した左側面図である。
【図19】前屈姿勢の脚式移動ロボット100がさらに体幹ロール軸10回りの駆動により脚に対し左側に揺動しているときに各連結カバー体122及び123が動作する様子を示した背面図である。
【図20】取っ手110を背中よりも低く形成することにより、脚式移動ロボット100の仰向け姿勢において取っ手110と床面の間には間隙が設けられている様子を示した図である。
【図21】取っ手110の把持動作に応じて全身の関節アクチュエータを脱力させるという脱力メカニズムを模式的に示した図である。
【図22】頭部が機体の前後方向に動作する様子を示した図である。
【図23】正面カバー101を閉じた状態の胴体正面を示した図である。
【図24】正面カバー101を開いた状態の胴体正面を示した図である。
【図25】正面カバー101を開いた状態の胴体側面を示した図である。
【図26】取っ手が取り付けられたバッテリ・パックを示した図である。
【図27】部品類の交換作業を禁止するための機能構成を模式的に示した図である。
【図28】前屈姿勢の脚式移動ロボット100がさらに体幹ロール軸10回りの駆動により脚に対し左側に揺動している様子を示した背面図である。
【図29】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【符号の説明】
【0089】
1…首関節ヨー軸
2A…第1の首関節ピッチ軸
2B…第2の首関節(頭)ピッチ軸
3…首関節ロール軸
4…肩関節ピッチ軸
5…肩関節ロール軸
6…上腕ヨー軸
7…肘関節ピッチ軸
8…手首関節ヨー軸
9…体幹ピッチ軸
10…体幹ロール軸
11…股関節ヨー軸
12…股関節ピッチ軸
13…股関節ロール軸
14…膝関節ピッチ軸
15…足首関節ピッチ軸
16…足首関節ロール軸
30…頭部ユニット,40…体幹部ユニット
50…腕部ユニット,51…上腕ユニット
52…肘関節ユニット,53…前腕ユニット
60…脚部ユニット,61…大腿部ユニット
62…膝関節ユニット,63…脛部ユニット
80…制御ユニット,81…主制御部
82…周辺回路
91,92…接地確認センサ
93,94…加速度センサ
95…姿勢センサ
96…加速度センサ
100…脚式移動ロボット
101…正面カバー
102…バッテリ交換口
103…メモリ・スティック用スロット
104…PCカード・スロット
105…表示部
110…取っ手
121…腰部かバー体
122…第1の連結カバー体
123…第2の連結カバー体
124…胴体カバー体
【技術分野】
【0001】
本発明は、多数の関節自由度を持つロボットに係り、特に、胴体に可動脚を連結して構成された脚式移動ロボットに関する。
【背景技術】
【0002】
電気的若しくは磁気的な作用を用いて人間の動作に似せた運動を行う機械装置のことを「ロボット」という。ロボットの語源は、スラブ語の“ROBOTA(奴隷機械)”に由来すると言われている。わが国では、ロボットが普及し始めたのは1960年代末からであるが、その多くは、工場における生産作業の自動化・無人化などを目的としたマニピュレータや搬送ロボットなどの産業用ロボット(industrial robot)であった。
【0003】
最近では、イヌやネコのように4足歩行の動物の身体メカニズムやその動作を模したペット型ロボット、あるいは、ヒトのような2足直立歩行を行う動物の身体メカニズムや動作をモデルにしてデザインされた「人間形」若しくは「人間型」と呼ばれるロボット(humanoid robot)など、脚式移動ロボットに関する研究開発が進展し、実用化への期待も高まってきている。
【0004】
ヒトの生体メカニズムや動作をエミュレートした脚式移動ロボットのことを、特に、「人間形」、若しくは「人間型」のロボット(humanoid robot)と呼ぶ。人間型ロボットは、例えば、生活支援、すなわち住環境その他の日常生活上の様々な場面における人的活動の支援などを行うことができる。
【0005】
脚式移動ロボットの用途の1つとして、産業活動・生産活動等における各種の難作業の代行が挙げられる。例えば、原子力発電プラントや火力発電プラント、石油化学プラントにおけるメンテナンス作業、製造工場における部品の搬送・組立作業、高層ビルにおける清掃、火災現場その他における救助といったような危険作業・難作業の代行などである。
【0006】
また、脚式移動ロボットの他の用途として、上述の作業支援というよりも、生活密着型、すなわち人間との「共生」あるいは「エンターティンメント」という用途が挙げられる。この種のロボットは、ヒトあるいはイヌ(ペット)、クマなどの比較的知性の高い脚式歩行動物の動作メカニズムや四肢を利用した豊かな感情表現を忠実に再現する。また、あらかじめ入力された動作パターンを単に忠実に実行するだけではなく、ユーザ(あるいは他のロボット)から受ける言葉や態度(「褒める」とか「叱る」、「叩く」など)に対して動的に対応した、生き生きとした応答表現を実現することも要求される。
【0007】
従来の玩具機械は、ユーザ操作と応答動作との関係が固定的であり、玩具の動作をユーザの好みに合わせて変更することはできない。この結果、ユーザは同じ動作しか繰り返さない玩具をやがては飽きてしまうことになる。これに対し、インテリジェントなロボットは、対話や機体動作などからなる行動を自律的に選択することから、より高度な知的レベルでリアリスティックなコミュニケーションを実現することが可能となる。この結果、ユーザはロボットに対して深い愛着や親しみを感じる。
【発明の開示】
【発明が解決しようとする課題】
【0008】
ヒューマノイドのような2足歩行のロボットは、重心位置が高く、歩行時などの立位姿勢での姿勢は不安定である。このため、2足歩行ロボットに関する研究の多くは、立位姿勢における姿勢安定制御に向けられている。言い換えれば、機体の他の部位に関して明確な設計手法を提案するものは少ない。
【0009】
例えば胴体部は、機体の中心に配置され、充分な容積を持つとともに、脚部や腕部などの可動肢を連結しており、機体の構成上重要な役割を果たすべきと思料されるが、そのデザインに関する明確な指針はあまりない。
【0010】
本発明は上述したような技術的課題を鑑みたものであり、その目的は、胴体に可動脚を連結して構成された、優れた脚式移動ロボットを提供することにある。
【課題を解決するための手段】
【0011】
本発明は、上記課題を参酌してなされたものであり、その第1の側面は、胴体と前記胴体に連結された可動脚を備えた脚式移動ロボットであって、
前記可動脚は前記胴体に対してロール軸及びピッチ軸回りの複合的な自由度を持ち、前記胴体と前記可動脚の連結部分において、
前記可動脚に固定された腰部カバー体と、
前記可動脚に対して前記ロール軸回りにのみ回転可能に取り付けられた第1の連結カバー体と、
前記第1の連結カバー体に対して前記ピッチ軸回りに回転可能であるとともに前記可動脚に対して前記ロール軸及び前記ピッチ軸回りに回転可能に取り付けられた1以上の第2の連結カバー体と、
前記第1の連結カバー体に対して前記ピッチ軸回りに回転可能であるとともに前記可動脚に対して前記ロール軸及び前記ピッチ軸回りに回転可能に取り付けられて前記胴体を被覆する胴体カバー体と、
を具備することを特徴とする脚式移動ロボットである。
【0012】
本発明に係る脚式移動ロボットは、前記可動脚は前記胴体に対してロール軸及びピッチ軸回りの複合的な自由度を備えている。このような場合、胴体と脚部の連結部は相当程度の可動領域を持つことになるため、駆動時に機体の外殻の隙間が生じないように、機体内部を隠蔽するカバー構造を工夫する必要がある。
【0013】
本発明によれば、腰部カバー体と、第1の連結カバー体と、第2の連結カバー体と、胴体カバー体という4種類のカバーを用いて、胴体部と可動脚の連結部分並びに体幹部において、体幹ロール軸回りの駆動時において、体幹ピッチ軸回りの自由度を制限することなく、且つ、体幹ピッチ軸回りの駆動時において、体幹ロール軸回りの自由度を制限することなく、胴体が体幹部において前屈しながらさらに体幹部において左右方向に揺動するという各自由度における最大限の可動範囲において、内部構造を隠蔽することができる。
【0014】
また、本発明の第2の側面は、胴体と前記胴体に連結された可動脚を備え、前記可動脚は所定の歩行方向に歩行動作を行なう脚式移動ロボットであって、
前記胴体の前記歩行方向の反対側の面の略上端縁に把持部を備える、
ことを特徴とする脚式移動ロボットである。
【0015】
本発明の第2の側面に係る脚式移動ロボットは、運搬・格納時の操作性の観点から、オペレータが機体を掴んで持ち上げるための把持部が用意されている。
【0016】
この把持部は、胴体後方の上端に配設されており、歩行中や脚式作業中、さらには暴走中であっても、オペレータは機体の後方からロボットを追いかけて、把持部を用いて容易に捕まえることができる。また、脚部や腕部などの主要な可動部は基本的に機体前方に向かう関節自由度を与えられているので、把持部を操作中に万一足部や腕部が暴走しても、オペレータの腕にぶつかったりして危害を被る心配が少ない。
【0017】
例えば仰向けなどの床上姿勢においては、把持部は床面側を向いてしまうので、オペレータの手が届きにくくなる。本発明によれば、把持部は、前記胴体が前記歩行方向の反対側の面において接地した床上姿勢において、床面との間に所定の間隙を持っているので、オペレータは容易に把持部に手を入れることができる。
【0018】
また、オペレータが把持部を掴むためには、機体の後方に回り込む格好となるので、オペレータの手や姿がカメラなどの視覚認識部の視野に入って、機体の行動計画などに影響を与えることはない。
【0019】
また、把持部は、暴走時などにおけるロボットの緊急停止機構を兼ねている。把持部の把持部分には、加圧センサが貼設されており、オペレータが把持部を掴んでいることを検出すると、この検出結果に応答して、機体の動作制御部は、全身の関節アクチュエータを脱力させるという脱力機構を備えている。例えば、各関節アクチュエータに最低ゲインを設定したり、出力トルクを最小値に設定することにより、脱力状態を実現することができる。あるいは、すべての又は一部の関節アクチュエータへの給電を停止することによっても、脱力状態を実現することができる。
【0020】
把持部の操作に応答して脱力オペレーションを行なうので、機体を運搬中にロボットが突然暴走しても、オペレータを怪我させることはない。また、把持部を掴むことによって機体動作が緊急停止しても、機体は把持部で支持されているので、ロボットが転倒する危険もない。
【0021】
また、本発明の第3の側面は、胴体と前記胴体に連結された可動脚を備えた脚式移動ロボットであって、
前記胴体の正面にて開閉操作可能に取り付けられた正面カバーと、
前記胴体の正面カバーで被覆される内側に配設された内部アクセス手段と、
を具備することを特徴とする脚式移動ロボットである。
【0022】
本発明の第3の側面に係る脚式移動ロボットは、胴体を利用して内部アクセス手段を実現している。より具体的には、胴体正面にPCカード・スロット、メモリ・スティック用スロット、バッテリ収容口などを配設して、内部アクセスを可能にしている。さらに、正面カバーを取り付けて、通常動作時にはこれらを外界から隠蔽して、機体デザイン上の美観を整えるとともに、機体オペレーション時の脱落防止や取り外し禁止を実現する。
【0023】
このような内部アクセス手段に装着されている部品類が機体動作中に突発的に取り外されると、機器の誤動作や破損を引き起こしかねない。例えば、主電源であるバッテリ・パックが抜き取られると、ロボットは姿勢維持用あるいは姿勢安定制御の駆動電力を失ってしまう。また、メモリ・アクセス中にメモリ・スティックやPCカードが抜き取られると、実行中の動作の次の処理ステップを失うことから、誤動作や暴走の危険がある。
【0024】
そこで、本発明によれば、機体オペレーション中は正面カバーの開成操作を禁止する手段を備え、機体オペレーション中におけるこれら装着部品類の取り外しや交換を制限するようにしている。
【発明の効果】
【0025】
本発明によれば、胴体に可動脚を連結して構成された、優れた脚式移動ロボットを提供することができる。
【0026】
本発明によれば、機体の中心に配置され、充分な容積を持つとともに、脚部や腕部などの可動肢を連結している胴体のデザインに関する明確な指針を得ることができる。
【0027】
本発明のさらに他の目的、特徴や利点は、後述する本発明の実施形態や添付する図面に基づくより詳細な説明によって明らかになるであろう。
【発明を実施するための最良の形態】
【0028】
以下、図面を参照しながら本発明の実施形態について詳解する。
【0029】
A.脚式移動ロボットの機械的構成
図1及び図2には本発明の実施に供される「人間形」又は「人間型」の脚式移動ロボット100が直立している様子を前方及び後方の各々から眺望した様子を示している。図示の通り、脚式移動ロボット100は、胴体部と、頭部と、左右の上肢部と、脚式移動を行う左右2足の下肢部とで構成され、例えば胴体に内蔵されている制御部(図示しない)により機体の動作を統括的にコントロールするようになっている。
【0030】
左右各々の下肢は、大腿部と、膝関節と、脛部と、足首と、足平とで構成され、股関節によって体幹部の略最下端にて連結されている。また、左右各々の上肢は、上腕と、肘関節と、前腕とで構成され、肩関節によって体幹部の上方の左右各側縁にて連結されている。また、頭部は、首関節によって体幹部の略最上端中央に連結されている。
【0031】
制御部は、この脚式移動ロボット100を構成する各関節アクチュエータの駆動制御や各センサ(後述)などからの外部入力を処理するコントローラ(主制御部)や、電源回路その他の周辺機器類を搭載した筐体である。制御部は、その他、遠隔操作用の通信インターフェースや通信装置を含んでいてもよい。
【0032】
このように構成された脚式移動ロボット100は、制御部による全身協調的な動作制御により、2足歩行を実現することができる。かかる2足歩行は、一般に、以下に示す各動作期間に分割される歩行周期を繰り返すことによって行われる。すなわち、
【0033】
(1)右脚を持ち上げた、左脚による単脚支持期
(2)右足が接地した両脚支持期
(3)左脚を持ち上げた、右脚による単脚支持期
(4)左足が接地した両脚支持期
【0034】
脚式移動ロボット100における歩行制御は、あらかじめ下肢の目標軌道を計画し、上記の各期間において計画軌道の修正を行うことによって実現される。すなわち、両脚支持期では、下肢軌道の修正を停止して、計画軌道に対する総修正量を用いて腰の高さを一定値で修正する。また、単脚支持期では、修正を受けた脚の足首と腰との相対位置関係を計画軌道に復帰させるように修正軌道を生成する。
【0035】
歩行動作の軌道修正を始めとして、機体の姿勢安定制御には、一般に、ZMPに対する偏差を小さくするための位置、速度、及び加速度が連続となるように、5次多項式を用いた補間計算により行う。ZMP(Zero Moment Point)を歩行の安定度判別の規範として用いている。ZMPによる安定度判別規範は、歩行系から路面には重力と慣性力、並びにこれらのモーメントが路面から歩行系への反作用としての床反力並びに床反力モーメントとバランスするという「ダランベールの原理」に基づく。力学的推論の帰結として、足底接地点と路面の形成する支持多角形(すなわちZMP安定領域)の辺上あるいはその内側にピッチ軸及びロール軸モーメントがゼロとなる点、すなわち「ZMP(Zero Moment Point)」が存在する。
【0036】
図3には、この脚式移動ロボット100が具備する関節自由度構成を模式的に示している。同図に示すように、脚式移動ロボット100は、2本の腕部と頭部1を含む上肢と、移動動作を実現する2本の脚部からなる下肢と、上肢と下肢とを連結する体幹部とで構成された、複数の肢を備えた構造体である。
【0037】
頭部を支持する首関節(Neck)は、首関節ヨー軸1と、第1及び第2の首関節ピッチ軸2A及び2Bと、首関節ロール軸3という4自由度を有している。
【0038】
また、各腕部は、その自由度として、肩(Shoulder)における肩関節ピッチ軸4と、肩関節ロール軸5と、上腕ヨー軸6、肘(Elbow)における肘関節ピッチ軸7と、手首(Wrist)における手首関節ヨー軸8と、手部とで構成される。手部は、複数本の指を含む多関節・多自由度構造体であるが、その詳細については後に詳解する。
【0039】
また、体幹部(Trunk)は、体幹ピッチ軸9と、体幹ロール軸10という2自由度を有する。
【0040】
また、下肢を構成する各々の脚部は、股関節(Hip)における股関節ヨー軸11と、股関節ピッチ軸12と、股関節ロール軸13と、膝(Knee)における膝関節ピッチ軸14と、足首(Ankle)における足首関節ピッチ軸15と、足首関節ロール軸16と、足部とで構成される。
【0041】
B.脚式移動ロボットの胴体構造
B−1.腰部構造
本実施形態に係る脚式移動ロボット100は、上半身においても豊かな関節自由度を備え、より自然でリアリスティックな機体動作を実現することができる。
【0042】
例えば、図3に示すように、股関節ピッチ軸12及び体幹ピッチ軸9を備え、前屈動作を行なうことができる。さらに、股関節ロール軸13及び体幹ロール軸10を備え、立脚に対して胴体を左右方向に揺動させることができる。また、腰部において、股関節と体幹の双方において、ピッチ軸及びロール軸の自由度を持つことから、これら4つの関節自由度を用いた複合的な動作により、胴体と脚部の連結部は相当程度の可動領域を持つ。
【0043】
他方、各関節部位においては、可動角を確保しながら機体の内部構造を隠蔽する必要がある。何故ならば、駆動時に機体の外殻の隙間が生じると、ユーザの指の挟み込みや、隙間からの異物混入による故障の原因となりかねないからである。
【0044】
1つの関節部位において単一の関節自由度しか備えていない場合には、当該自由度に沿って出現するカバー構造を設けることによって、可動角を確保しながら機体の内部構造を容易に隠蔽することができる。これに対し、2以上の関節自由度を備える場合には、一方の関節軸の駆動時に、他方の関節軸の自由度を制限することなく、内部構造の隠蔽する機構は容易ではない。
【0045】
本実施形態に係る脚式移動ロボット100の場合、上述したように、股関節並びに体幹部においてピッチ軸及びロール軸の2方向の自由度を持つとともに、各軸回りの駆動を同時に行うという複合的な動作を行なうことから、隠蔽機構もこれに対応しなければならない。
【0046】
まず、脚式移動ロボット100の股関節並びに体幹部における複合的な自由度構成について、図4〜図8、並びに図29を参照しながら説明する。
【0047】
図4及び図5、図29には、外筐(外殻若しくはカバー)を取り外して、内部構造を露出した状態の胴体の背面図、左側面図、並びに左正面斜視図をそれぞれ示している。図4並びに図5に示すように、本実施形態に係る脚式移動ロボット100の胴体部には、左右の腕部を連結並びに駆動するための左右の肩関節ピッチ軸アクチュエータA4と、胴体部を体幹付近において左右方向に揺動させるための体幹ロール軸アクチュエータA10と、胴体部を体幹付近において前後方向の屈曲すなわち前屈動作を可能にするための体幹ピッチ軸アクチュエータA9と、左右の脚部を連結してヨー軸回りの回転すなわち足部の向きを与えるための股関節ヨー軸アクチュエータA11と、左右の足部を連結してそれぞれに対して左右方向の揺動運動を与えるための股関節ロール軸アクチュエータA13が搭載されている。また、胴体後方の略上端縁には取っ手110が形設されている(後述)。
【0048】
図6及び図7には、体幹ロール軸アクチュエータA10の駆動により、胴体部が体幹部において右方向に揺動している様子を、正面並びに背面からそれぞれ示している。さらに、図8には、体幹ピッチ軸アクチュエータA9の駆動により、胴体部が体幹部において前屈している様子を示している。
【0049】
このように、本実施形態に係る脚式移動ロボット100は、体幹部においてピッチ軸及びロール軸の2方向の自由度を持つとともに、各軸回りの駆動を同時に行うという複合的な動作を行なうことができる。このような場合、胴体が体幹部において前屈しながらさらに体幹部において左右方向に揺動するという各自由度における最大限の可動範囲において、一方の関節軸の駆動時に、他方の関節軸の自由度を制限することなく、内部構造の隠蔽する必要がある。例えば、体幹ロール軸10回りの駆動時において、体幹ピッチ軸9回りの自由度を制限することなく、内部構造を隠蔽しなければならない。同様に、体幹ピッチ軸9回りの駆動時において、体幹ロール軸10回りの自由度を制限することなく、内部構造を隠蔽しなければならない。
【0050】
本実施形態では、腰部カバー体121と、第1の連結カバー体122と、第2の連結カバー体123と、胴体カバー体124という4種類のカバーを用いて、胴体部と可動脚の連結部分並びに体幹部において、体幹ロール軸10回りの駆動時において、体幹ピッチ軸9回りの自由度を制限することなく、且つ、体幹ピッチ軸9回りの駆動時において、体幹ロール軸10回りの自由度を制限することなく、胴体が体幹部において前屈しながらさらに体幹部において左右方向に揺動するという各自由度における最大限の可動範囲において、内部構造を隠蔽することとした。
【0051】
図9には、腰部カバー体121を斜視した様子を示している。この腰部カバー体121は、胴体の下端を覆う断面略U字形の成型体であり、その底面において左右の可動脚の股関節ヨー軸アクチュエータA11を挿通するための開口が形設されている。腰部カバー体121の背面側は、体幹ロール軸10回りの回転に倣った曲面が形設されている。
【0052】
また、図10及び図11には、この腰部カバー体121を図4〜図6に示した脚式移動ロボット100の胴体に取り付けた様子を示している。股関節カバー体121は、左右の可動脚の股関節ヨー軸アクチュエータA11を挿通しており、左右の可動脚に固定された格好となり、体幹ピッチ軸9及び体幹ロール軸10のいずれの動作にも影響されない。
【0053】
図12には、第1の連結カバー体122を斜視した様子を示している。第1の連結カバー体122は、上記の腰部カバー体121の直近上位のカバーであり、その底面には腰部カバー体121を収容するための開口を持つ略筒状の構造体である。また、第1の連結カバー体122の背面側には、腰部カバー体121の背面に倣った、体幹ロール軸10回りの略回転形状の曲面が形設されている。この第1の連結カバー体122の左右の各側面において体幹ピッチ軸9回りの動作を開放するための切り欠き部122Aが形設されている。また、この切り欠き部122Aの端縁には、胴体フレーム側と係合するための係合部122Bが設けられている。
【0054】
図13には、この第1の連結カバー体122を図4〜図6に示した脚式移動ロボット100の胴体に取り付けた様子を示している。第1の連結カバー体122は、その底面において腰部カバー体121を挿通するとともに、左右の切り欠き部122Bにおいて体幹ピッチ軸9の動作を開放していることから、左右の可動脚に対して体幹ロール軸10回りの自由度のみが与えられており、体幹ピッチ軸9の動作に影響されない。
【0055】
図14には、第2の連結カバー体123を斜視した様子を示している。第2の連結カバー体123は、上記の第1の連結カバー体122の直近上位のカバーであり、第1の連結カバー体122の背面に倣った体幹ロール軸10回りの略回転形状の曲面が形設されている略U字形状の成型体である。このU字の左右の略先端縁には、体幹ピッチ軸9に対して回動可能に支持される取付け部123Aが配設されている。
【0056】
図15には、この第2の連結カバー体123を図4〜図6に示した脚式移動ロボット100の胴体に取り付けた様子を示している。第2の連結カバー体123は、その底面において第1の連結カバー体122を挿通するとともに、左右の取付け部123Bにおいて体幹ピッチ軸9回りに回動可能に支持されていることから、左右の可動脚に対して体幹ピッチ軸9及び体幹ロール軸10回りの自由度が与えられている。
【0057】
図16には、さらに胴体カバー体124を図4〜図6に示した脚式移動ロボット100の胴体に取り付けた様子を示している。胴体カバー体124は、その底面において第2の連結カバー体123を挿通するとともに、左右の腕部を取り付けていることから、体幹部より上側の胴体と一体的に動くとともに、左右の可動脚に対しては、体幹ピッチ軸9及び体幹ロール軸10回りの自由度が与えられている。
【0058】
図17には、本実施形態に係る脚式移動ロボット100が基本的な立位姿勢をとっている様子を示している。この状態では、第1の連結カバー体122並びに第2の連結カバー体123は、胴体カバー体124内に収容されていて、外界からは隠れている。
【0059】
また、図18には、脚式移動ロボット100が体幹ピッチ軸9回りの駆動により前屈している様子を示している。
【0060】
上述したように、第1の連結カバー体122は、左右の可動脚に対しては、体幹ロール軸10回りの自由度しか与えられておらず、図示のような体格ピッチ軸9回りの動作には追従せず、可動脚に対して同じ相対位置関係でとどまる。これに対し、第2の連結カバー体123並びに胴体カバー体124はいずれも、可動脚に対して体幹ピッチ軸9回りの回転自由度が与えられている。したがって、体幹ピッチ軸9回りの駆動により前屈姿勢をとった場合には、それぞれ可動脚に対して体幹ピッチ軸9回りに動作する。この結果、図示のように、胴体カバー体124内に収容されていた第1の連結カバー体122及び第2の連結カバー体123が出現して、腰部を覆い尽くす。すなわち、体幹ピッチ軸9回りの最大限の可動範囲において、機体の内部構造を隠蔽することができる。
【0061】
図19には、上述したような前傾姿勢において、さらに体幹ロール軸10回りの駆動により脚に対し左側に揺動しているときに各連結カバー体122及び123が動作する様子を背面側から示している。また、図28には、上述したような前傾姿勢において、さらに体幹ロール軸10回りの駆動により脚に対し左側に揺動しているときの脚式移動ロボット100の様子を背面側から示している。
【0062】
上述したように、第1の連結カバー体122は、左右の可動脚に対しては、体幹ロール軸10回りの自由度のみが与えられている。また、第2の連結カバー体123並びに胴体カバー体124はいずれも、可動脚に対して体幹ピッチ軸9及び体幹ロール軸10双方の回転自由度が与えられている。したがって、既に胴体カバー体124から出現している第1の連結カバー体122及び第2の連結カバー体123は、胴体カバー体124とともに、可動脚に対して体幹ロール軸10回りに作動して、機体の内部構造を隠蔽することができる。このとき、体幹ロール軸10回りの駆動時において、体幹ピッチ軸9回りの自由度を制限することなく、内部構造を隠蔽している、ということを充分に理解されたい。
【0063】
B−2.機体の運搬・格納
脚式移動ロボット100も、他の機械装置と同様、未使用時には運搬したり所定の保管場所に格納する必要がある。機械装置の多くは、運搬・格納時の操作性の観点から、ハンドル若しくは取っ手が用意されている。
【0064】
自律作業を行なう脚式移動ロボット100にハンドルを取り付ける際、以下の事柄に留意しながら設計すべきであると本発明者らは思料する。
【0065】
(1)立ち姿勢、床上姿勢(仰向け、うつ伏せ)などいずれの姿勢であっても把持し易いこと。
(2)歩行中など脚式作業中、さらには暴走中であっても把持し易いこと。
(3)ハンドルで把持している最中にロボットが突然暴走しても、オペレータを怪我させないこと。
(4)歩行中など脚式作業中にハンドルを掴もうとしても、ロボットが転倒する危険がないこと。
(5)ハンドルを掴もうとするオペレータの手や姿がカメラなどの視覚認識部の視野に入って、機体の行動計画などに影響を与えないこと。
【0066】
このような配慮から、本実施形態に係る脚式移動ロボット100は、胴体後方の略上端縁に取っ手110が形設されている(図1及び図2を参照のこと)。
【0067】
胴体後方の上端に取っ手110を配置することによって、歩行中や脚式作業中、さらには暴走中であっても、オペレータは機体の後方からロボットを追いかけて、取っ手110を把持することによって容易に捕まえることができる。また、脚部や腕部などの主要な可動部は基本的に機体前方に向かう関節自由度を与えられているので、取っ手110を操作中に万一足部や腕部が暴走しても、取っ手110を掴むオペレータの腕にぶつかったりして危害を被る心配が少ない。
【0068】
例えば仰向けなどの床上姿勢においては、取っ手110は床面側を向いてしまうので、オペレータの手が届きにくくなる。本実施形態では、図20に示すように、取っ手110を背中よりも低く形成することにより、仰向け姿勢においても取っ手110と床面の間には間隙が設けられ、オペレータは容易に取っ手110に手を入れることができる。
【0069】
また、オペレータが取っ手110を掴むためには、機体の後方に回り込む格好となるので、オペレータの手や姿がカメラなどの視覚認識部の視野に入って、機体の行動計画などに影響を与えることはない。
【0070】
本実施形態では、取っ手110は、暴走時などにおけるロボットの緊急停止機構を兼ねている。取っ手110の把持部分には、加圧センサが貼設されており、オペレータが取っ手110を把持することを検出すると、この検出結果に応答して、機体の動作制御部は、全身の関節アクチュエータを脱力させるという脱力機構を備えている(図21を参照のこと)。例えば、各関節アクチュエータに最低ゲインを設定したり、出力トルクを最小値に設定することにより、脱力状態を実現することができる。あるいは、すべての又は一部の関節アクチュエータへの給電を停止することによっても、脱力状態を実現することができる。
【0071】
取っ手110のハンドル操作に応答して脱力オペレーションを行なうので、機体を運搬中にロボットが突然暴走しても、オペレータを怪我させることはない。また、取っ手110を掴むことによって機体動作が緊急停止しても、機体は取っ手110で支持されているので、ロボットが転倒する危険もない。
【0072】
また、取って110の他の用途として、後頭部の保護を挙げることができる。図3に示したように、本実施形態に係る脚式移動ロボットは、第1及び第2の首関節ピッチ軸2A及び2Bを備え、両ピッチ軸の駆動により、頭部は機体の前後方向に対して広い可動範囲を備えている。
【0073】
図21には、頭部が機体の前後方向に動作する様子を示している。図示の通り、頭部は、頭を前にもたげたような前方位置と、頭が正面を向くような基本位置と、頭を胴体後方に垂らしたような後方位置を備えている。この後方位置において、後頭部は取っ手110が定義する最後端位置よりも内側に収容されている。
【0074】
例えば、機体が後方に転倒した場合、床面との衝突時に受ける外力のために、第1及び第2の首関節ピッチ軸2A及び2Bが受動的に動作してしまい、元の姿勢に拘わらず頭部が後方位置に移動してしまう。このとき、後頭部が床面に衝突してしまうと、頭部や首関節ピッチ軸アクチュエータが破損してしまう危険がある。これに対し、本実施形態では、図21に示すように、後頭部は取っ手110が定義する最後端位置によって保護されている。
【0075】
B−3.機体への内部アクセス
多くの情報機器類は、機器内部へのアクセス手段を備えている。例えば、カード・スロットやコネクタなどを持ち、外部記憶装置やその他の機能拡張用の周辺装置を収容したり接続する。また、バッテリ駆動の機器においては、バッテリの取り外し、交換作業が必須となっている。
【0076】
本実施形態に係る脚式移動ロボット100は、胴体を利用して内部アクセス機構を実現している。より具体的には、胴体正面にPCカード・スロット、メモリ・スティック用スロット、バッテリ収容口などを配設して、内部アクセスを可能にしている。さらに、正面カバーを取り付けて、通常動作時にはこれらを外界から隠蔽して、機体デザイン上の美観を整えるとともに、機体オペレーション時の脱落防止や取り外し禁止を実現する。
【0077】
図23には、正面カバー101を閉じた状態の胴体正面を示している。また、図24には、正面カバー101を開いた状態の胴体正面を示している。さらに、図25には、正面カバー101を開いた状態の胴体側面を示している。各図に示すように、正面カバー101は、その略下端縁にて胴体正面側に対して回動自在にヒンジ結合されており、胴体に対する開閉操作が可能となっている。また、正面カバー101の内側の略上端には、ラッチなどの係止部(図示しない)が配設されており、正面カバー101の閉成時には胴体正面側の対応部位と係合して、閉成状態を維持するようになっている。
【0078】
図24に示すように、正面カバー101で覆われている胴体正面には、バッテリ交換口102と、メモリ・スティック用スロット103と、PCカード・スロット104などの内部アクセス手段が用意されている。
【0079】
バッテリ交換口102には、機体の駆動用電源としてのバッテリ・パックを着脱可能に収容することができる。本実施形態において使用されるバッテリ・八苦には、このバッテリ交換口102に対する交換操作を用意するための取っ手が取り付けられている(図26を参照のこと)。また、メモリ・スティック用スロット103には、機体の動作制御用のプログラムや機体の動作パターンを記述したモーション・データなどを格納したメモリ・スティックを交換可能に挿入することができる。ロボット本体側では、メモリ・スティックからこれらプログラムやモーション・データをインストールしたり、あるいはメモリ・スティックからメイン・メモリにロードして機体動作を実行する。また、PCカード・スロット104には、メモリ・カードやハード・ディスク・カード、無線LANカードなどPCMCIA/JEIDAにおいて規定された使用に従う各種のPCカードを交換可能に挿入することができる。その他、機体の内部状態などをインジケートするための表示部105も配設されている。
【0080】
このような内部アクセス手段に装着されている部品類が機体動作中に突発的に取り外されると、機器の誤動作や破損を引き起こしかねない。例えば、主電源であるバッテリ・パックが抜き取られると、ロボットは姿勢維持用あるいは姿勢安定制御の駆動電力を失ってしまう。また、メモリ・アクセス中にメモリ・スティックやPCカードが抜き取られると、実行中の動作の次の処理ステップを失うことから、誤動作や暴走の危険がある。
【0081】
本実施形態では、正面カバー101は、機体オペレーション中におけるこれら装着部品類の取り外しや交換を制限する機能を持つ。すなわち、機体オペレーション中は正面カバー101の開成操作が禁止され、バッテリやメモリ・スティックの抜去を行なえなくする。
【0082】
図27には、部品類の交換作業を禁止するための機能構成を模式的に示している。
【0083】
開閉部111は、胴体に対して回動自在にヒンジ結合された正面カバー101からなる。この開閉部111の他端には、ラッチなどの係止部が配設されており、開閉操作部112はユーザ操作に応答してこのラッチを解除する。
【0084】
開成禁止部113は、例えばソレノイドなどの部品で構成され、開閉操作部112へのユーザ操作に係らず、ラッチの解除を禁止して、開閉部111が開かないようにする。機体動作をコントロールする機体動作制御部114が稼動中はこの開成禁止部113が付勢されて、開閉部111が開かない。この結果、内部に収容されているバッテリやメモリ・スティックなどの部品の取り外しが禁止される。
【産業上の利用可能性】
【0085】
以上、特定の実施例を参照しながら、本発明について詳解してきた。しかしながら、本発明の要旨を逸脱しない範囲で当業者が該実施例の修正や代用を成し得ることは自明である。
【0086】
本発明の要旨は、必ずしも「ロボット」と称される製品には限定されない。すなわち、電気的若しくは磁気的な作用を用いて人間の動作に似せた運動を行う機械装置であるならば、例えば玩具等のような他の産業分野に属する製品であっても、同様に本発明を適用することができる。
【0087】
要するに、例示という形態で本発明を開示してきたのであり、本明細書の記載内容を限定的に解釈するべきではない。本発明の要旨を判断するためには、特許請求の範囲の記載を参酌すべきである。
【図面の簡単な説明】
【0088】
【図1】本発明の実施に供される脚式移動ロボットが直立している様子を前方から眺望した様子を示した図である。
【図2】本発明の実施に供される脚式移動ロボットが直立している様子を後方から眺望した様子を示した図である。
【図3】脚式移動ロボットが具備する関節自由度構成を模式的に示した図である。
【図4】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【図5】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【図6】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【図7】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【図8】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【図9】腰部カバー体121の斜視図である。
【図10】腰部カバー体121を図4〜図5に示した脚式移動ロボット100の胴体に取り付けた様子を示した背面図である。
【図11】腰部カバー体121を図4〜図5に示した脚式移動ロボット100の胴体に取り付けた様子を示した斜視図である。
【図12】第1の連結カバー体122を斜視した様子を示した図である。
【図13】第1の連結カバー体122を図4〜図5に示した脚式移動ロボット100の胴体に取り付けた様子を示した斜視図である。
【図14】第2の連結カバー体123を斜視した様子を示した図である。
【図15】第2の連結カバー体123を図4〜図5に示した脚式移動ロボット100の胴体に取り付けた様子を示した背面図である。
【図16】胴体カバー体124を図4〜図5に示した脚式移動ロボット100の胴体に取り付けた様子を示した図である。
【図17】本実施形態に係る脚式移動ロボット100が基本的な立位姿勢をとっている様子を示した左側面図である。
【図18】体幹ピッチ軸9回りの駆動により脚式移動ロボット100が前屈した様子を示した左側面図である。
【図19】前屈姿勢の脚式移動ロボット100がさらに体幹ロール軸10回りの駆動により脚に対し左側に揺動しているときに各連結カバー体122及び123が動作する様子を示した背面図である。
【図20】取っ手110を背中よりも低く形成することにより、脚式移動ロボット100の仰向け姿勢において取っ手110と床面の間には間隙が設けられている様子を示した図である。
【図21】取っ手110の把持動作に応じて全身の関節アクチュエータを脱力させるという脱力メカニズムを模式的に示した図である。
【図22】頭部が機体の前後方向に動作する様子を示した図である。
【図23】正面カバー101を閉じた状態の胴体正面を示した図である。
【図24】正面カバー101を開いた状態の胴体正面を示した図である。
【図25】正面カバー101を開いた状態の胴体側面を示した図である。
【図26】取っ手が取り付けられたバッテリ・パックを示した図である。
【図27】部品類の交換作業を禁止するための機能構成を模式的に示した図である。
【図28】前屈姿勢の脚式移動ロボット100がさらに体幹ロール軸10回りの駆動により脚に対し左側に揺動している様子を示した背面図である。
【図29】脚式移動ロボット100が持つ股関節並びに体幹部における複合的な自由度構成を説明するための図である。
【符号の説明】
【0089】
1…首関節ヨー軸
2A…第1の首関節ピッチ軸
2B…第2の首関節(頭)ピッチ軸
3…首関節ロール軸
4…肩関節ピッチ軸
5…肩関節ロール軸
6…上腕ヨー軸
7…肘関節ピッチ軸
8…手首関節ヨー軸
9…体幹ピッチ軸
10…体幹ロール軸
11…股関節ヨー軸
12…股関節ピッチ軸
13…股関節ロール軸
14…膝関節ピッチ軸
15…足首関節ピッチ軸
16…足首関節ロール軸
30…頭部ユニット,40…体幹部ユニット
50…腕部ユニット,51…上腕ユニット
52…肘関節ユニット,53…前腕ユニット
60…脚部ユニット,61…大腿部ユニット
62…膝関節ユニット,63…脛部ユニット
80…制御ユニット,81…主制御部
82…周辺回路
91,92…接地確認センサ
93,94…加速度センサ
95…姿勢センサ
96…加速度センサ
100…脚式移動ロボット
101…正面カバー
102…バッテリ交換口
103…メモリ・スティック用スロット
104…PCカード・スロット
105…表示部
110…取っ手
121…腰部かバー体
122…第1の連結カバー体
123…第2の連結カバー体
124…胴体カバー体
【特許請求の範囲】
【請求項1】
胴体と前記胴体に連結された可動脚を備えた脚式移動ロボットであって、
前記胴体の正面にて開閉操作可能に取り付けられた正面カバーと、
前記胴体の正面カバーで被覆される内側に配設された内部アクセス手段と、
を具備することを特徴とする脚式移動ロボット。
【請求項2】
前記内部アクセス手段は、少なくとも機体動作の主電源の挿入口、及び/又は、メモリやその他の拡張機器を交換可能に装着する挿入口を含む、
ことを特徴とする請求項1に記載の脚式移動ロボット。
【請求項3】
機体動作時における前記正面カバーの開成動作を禁止する開成禁止部をさらに備える、
ことを特徴とする請求項1に記載の脚式移動ロボット。
【請求項1】
胴体と前記胴体に連結された可動脚を備えた脚式移動ロボットであって、
前記胴体の正面にて開閉操作可能に取り付けられた正面カバーと、
前記胴体の正面カバーで被覆される内側に配設された内部アクセス手段と、
を具備することを特徴とする脚式移動ロボット。
【請求項2】
前記内部アクセス手段は、少なくとも機体動作の主電源の挿入口、及び/又は、メモリやその他の拡張機器を交換可能に装着する挿入口を含む、
ことを特徴とする請求項1に記載の脚式移動ロボット。
【請求項3】
機体動作時における前記正面カバーの開成動作を禁止する開成禁止部をさらに備える、
ことを特徴とする請求項1に記載の脚式移動ロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図21】
【図22】
【図23】
【図24】
【図25】

【図26】
【図27】
【図28】

【図29】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図20】
【公開番号】特開2008−296368(P2008−296368A)
【公開日】平成20年12月11日(2008.12.11)
【国際特許分類】
【出願番号】特願2008−223751(P2008−223751)
【出願日】平成20年9月1日(2008.9.1)
【分割の表示】特願2002−74060(P2002−74060)の分割
【原出願日】平成14年3月18日(2002.3.18)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成20年12月11日(2008.12.11)
【国際特許分類】
【出願日】平成20年9月1日(2008.9.1)
【分割の表示】特願2002−74060(P2002−74060)の分割
【原出願日】平成14年3月18日(2002.3.18)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]