
脚揺動装置及びこれを備える椅子型マッサージ機
【課題】使用者の脚部を揺動させることによるマッサージ感を向上させることができるマッサージ機を提供する。
【解決手段】オットマン40は、使用者の脚部における下腿部分を支持するレッグ41と、使用者の脚部における足先部分を支持するフット42と、使用者の脚部を揺動させる揺動機構と、使用者の下腿部分に対して押圧施術を施すためのエアバッグとを備えている。そして、揺動機構によって使用者の脚部を揺動させる場合には、フット42によって足先部分が支持される使用者の下腿部分におけるふくらはぎ、及び幅方向における両側の少なくとも一部とレッグ41とを非接触状態にさせる。
【解決手段】オットマン40は、使用者の脚部における下腿部分を支持するレッグ41と、使用者の脚部における足先部分を支持するフット42と、使用者の脚部を揺動させる揺動機構と、使用者の下腿部分に対して押圧施術を施すためのエアバッグとを備えている。そして、揺動機構によって使用者の脚部を揺動させる場合には、フット42によって足先部分が支持される使用者の下腿部分におけるふくらはぎ、及び幅方向における両側の少なくとも一部とレッグ41とを非接触状態にさせる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、使用者の脚部を揺動させる揺動手段を備える脚揺動装置、及び該脚揺動装置を備える椅子型マッサージ機に関する。
【背景技術】
【0002】
従来、座部に着座した使用者の脚部を施術する機能を有するマッサージ機として、例えば特許文献1に記載の椅子型マッサージ機が提案されている。この椅子型マッサージ機において使用者の脚部を支持するオットマンには、脚揺動装置が設けられている。
【0003】
この脚揺動装置は、使用者の脚部における下腿部分を支持する下腿支持部及び使用者の脚部における足先部分を支持する足先支持部を揺動させるべく駆動する揺動機構(揺動手段)を備えている。この揺動機構の駆動によって、オットマンに支持される使用者の脚部に対して揺動施術が施される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−237295号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、使用者の足先部分を足先支持部で支持した状態で揺動機構を駆動させる場合、使用者の下腿部分が下腿支持部に接触し、使用者に不快感を与えるおそれがある。また、揺動速度が高速である程、下腿部分と下腿支持部との接触度合が大きくなり、脚部の揺動に伴うマッサージ感が低下してしまう。
【0006】
本発明は、このような事情に鑑みてなされたものであり、その目的は、使用者の脚部を揺動させることによるマッサージ感を向上させることができるマッサージ機を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の脚揺動装置は、使用者の脚部における下腿部分を支持するための下腿支持手段と、使用者の脚部において下腿部分よりも足先に近い足先部分を支持するための足先支持手段と、前記下腿支持手段によって支持される使用者の下腿部分に対して押圧施術を施すべく駆動する押圧施術手段と、前記足先支持手段によって足先部分が支持される使用者の脚部を揺動させるべく駆動する揺動手段と、を備え、前記揺動手段の駆動によって使用者の脚部を揺動させる場合には、前記足先支持手段によって足先部分が支持される使用者の下腿部分におけるふくらはぎ、及び使用者の脚部が並ぶ方向である規定の方向における両側の少なくとも一部と前記下腿支持手段とを非接触状態にさせることを要旨とする。
【0008】
本発明の脚揺動装置は、前記足先支持手段を前記下腿支持手段に対して相対移動させる移動機構をさらに備え、前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有しており、前記移動機構は、前記足先支持手段と前記下腿支持手段との位置関係が、前記足先支持手段によって足先部分が支持される使用者のふくらはぎを前記下腿支持手段の前記支持面で支持可能となる第1の関係、又は前記足先支持手段によって足先部分が支持される使用者のふくらはぎを前記支持面から離間させる第2の関係となるように、前記足先支持手段を前記下腿支持手段に対して相対移動させることが好ましい。
【0009】
本発明の脚揺動装置において、前記移動機構は、前記足先支持手段を移動させるための機構であり、前記足先支持手段は、該足先支持手段に足先部分が支持される使用者のふくらはぎを前記下腿支持手段の前記支持面で支持可能となる第1の位置と、前記足先支持手段に足先部分が支持される使用者のふくらはぎを前記支持面から離間させる第2の位置との間で移動可能に構成されていることが好ましい。
【0010】
本発明の脚揺動装置において、前記移動機構は、前記下腿支持手段を移動させるための機構であり、前記下腿支持手段は、前記足先支持手段に足先部分が支持される使用者のふくらはぎを前記支持面で支持可能となる第1の位置と、前記足先支持手段に足先部分が支持される使用者のふくらはぎから前記支持面を離間させる第2の位置との間で移動可能に構成されていることが好ましい。
【0011】
本発明の脚揺動装置において、前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、前記足先支持手段は、使用者のふくらはぎを前記支持面で支持可能となる位置で当該使用者の足先部分を支持する第1の支持部と、使用者のふくらはぎを前記支持面から離間させる位置で当該使用者の足先部分を支持する第2の支持部とを有することが好ましい。
【0012】
本発明の脚揺動装置において、前記第1及び第2の各支持部は、前記下腿支持手段の前記支持面と交差する方向において互いに異なる位置に配置されていることが好ましい。
本発明の脚揺動装置において、前記第1及び第2の各支持部は、前記下腿支持手段の前記支持面と交差する方向に沿って並ぶように配置されていることが好ましい。
【0013】
本発明の脚揺動装置において、前記第2の支持部は、前記第1の支持部で使用者の足先部分におけるかかと側を支持する場合に当該使用者の足先部分におけるつま先側を支持するつま先支持部位と、使用者の足先部分におけるかかと側を支持するかかと支持部位とを有することが好ましい。
【0014】
本発明の脚揺動装置において、前記かかと支持部位は、前記つま先支持部位を挟んで前記下腿支持手段の反対側に配置されていることが好ましい。
本発明の脚揺動装置において、前記下腿支持手段には、使用者の下腿部分におけるふくらはぎを支持する支持面に突設された一対の壁部が、前記支持面における前記規定の方向の両側に配置されており、前記第2の支持部は、前記両壁部のうち一方の壁部の先端に設けられる右脚用の支持部位と、他方の壁部の先端に設けられる左脚用の支持部位とを有することが好ましい。
【0015】
本発明の脚揺動装置において、前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、前記足先支持手段は、本体部と、該本体部に対して可動する可動部材とを有し、前記本体部は、使用者のふくらはぎが前記支持面によって支持されるように当該使用者の足先部分を支持可能に構成され、前記可動部材は、前記本体部を挟んで前記下腿支持手段の反対側に位置する第1の位置と、前記本体部と前記下腿支持手段とを結ぶ方向とは異なる位置に設定された第2の位置とに設置可能とされており、前記可動部材には、該可動部材が第1の位置に位置する場合において前記本体部に足先部分が支持される使用者の足裏に対向する対向部と、該可動部材が第2の位置に位置する場合において使用者のふくらはぎが前記支持面から離間するように当該使用者の足先部分が載置される載置部とが設けられていることが好ましい。
【0016】
本発明の脚揺動装置において、前記載置部は、前記可動部材において前記対向部とは異なる位置に設けられていることが好ましい。
本発明の脚揺動装置において、前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、前記足先支持手段には、使用者の足先部分の少なくとも一部を収容する収容部と、該収容部に収容される使用者の足先部分に対して前記収容部外に押し出すべく駆動する押出手段とが設けられており、前記押出手段の非駆動時には、前記収容部に足先部分の少なくとも一部が収容される使用者のふくらはぎが前記下腿支持手段の前記支持面に支持され、前記押出手段の駆動時には、使用者のふくらはぎが前記下腿支持手段の前記支持面から離間されることが好ましい。
【0017】
本発明の脚揺動装置は、前記足先支持手段を、前記規定の方向に延びる軸線を中心に回転させる回転機構をさらに備え、前記足先支持手段は、前記収容部に収容される使用者の足先部分の足裏に対向する対向部を有し、前記押出手段は、前記収容部に収容される使用者の足先部分のかかと側に対向する位置に前記対向部が前記回転機構の駆動によって配置される場合に、前記対向部を、使用者のふくらはぎを前記下腿支持手段の前記支持面から離間させる方向に移動させることが好ましい。
【0018】
本発明の脚揺動装置は、前記下腿支持手段と前記足先支持手段とを連結する連結手段と、前記下腿支持手段及び前記足先支持手段を、前記規定の方向に沿って延びる回転軸を中心に回転させる回転機構と、を備えることが好ましい。
【0019】
本発明の脚揺動装置において、前記下腿支持手段には、使用者の下腿部分を支持するための支持面と、該支持面を変位させるべく駆動する変位手段と、がさらに設けられ、前記支持面は、前記変位手段によって、使用者の下腿部分に当接可能な位置と、下腿部分に当接不能な位置との間で変位することが好ましい。
【0020】
本発明の脚揺動装置において、前記下腿支持手段には、該下腿支持手段によって支持される使用者の下腿部分を、前記規定の方向における両側から挟むように配置される一対の可動壁が設けられており、前記両可動壁は、使用者の下腿部分を支持可能な位置と、下腿部分を支持不能な位置との間で移動可能に構成されていることが好ましい。
【0021】
本発明の脚揺動装置において、前記下腿支持手段において使用者の両下腿部分の間となる位置、及び該両下腿部分の外側となる位置には、壁部がそれぞれ設けられ、前記下腿支持手段において使用者のふくらはぎに対応する部分には、開口部が形成されていることが好ましい。
【0022】
本発明の椅子型マッサージ機は、使用者が着座する座部と、前記座部に着座する使用者の脚部を支持しつつ揺動させる上記記載の脚揺動装置と、を備えることが好ましい。
【発明の効果】
【0023】
本発明によれば、使用者の脚部を揺動させることによるマッサージ感を向上させることができる。
【図面の簡単な説明】
【0024】
【図1】本発明の脚揺動装置の一実施例であるオットマンを備える椅子型マッサージ機の第1の実施形態を示す側面図。
【図2】オットマンが座部に対して回転した様子を模式的に示す側面図。
【図3】第1の実施形態におけるオットマンを模式的に示す斜視図。
【図4】(a)はフットを構成するフット本体部が第1の位置に位置する様子を模式的に示す斜視図、(b)はフット本体部が第2の位置に位置する様子を模式的に示す斜視図。
【図5】第1の実施形態における椅子型マッサージ機の電気的構成の要部を説明するブロック図。
【図6】(a)は第2の実施形態においてレッグが第1の位置に位置する様子を模式的に示す斜視図、(b)はレッグが第2の位置に位置する様子を模式的に示す斜視図。
【図7】第2の実施形態における椅子型マッサージ機の電気的構成の要部を説明するブロック図。
【図8】(a)は第3の実施形態においてフットの第1の支持部で使用者の足先部分を支持する様子を模式的に示す斜視図、(b)はフットの第2の支持部で使用者の足先部分を支持する様子を模式的に示す斜視図。
【図9】(a)は第4の実施形態におけるオットマンを模式的に示す斜視図、(b)はフットの第2の支持部を模式的に示す平面図。
【図10】(a)はフットの第1及び第2の各支持部で使用者の足先部分を支持する様子を模式的に示す正面図、(b)はその側面図。
【図11】(a)はフットの第2の支持部で使用者の足先部分を支持する様子を模式的に示す正面図、(b)はその側面図。
【図12】(a)(b)は第5の実施形態におけるオットマンを模式的に示す斜視図。
【図13】(a)(b)は第6の実施形態におけるオットマンを模式的に示す斜視図。
【図14】(a)(b)は第7の実施形態におけるオットマンのフットを構成するフット本体部を模式的に示す正面図。
【図15】第7の実施形態におけるオットマンのフットを模式的に示す斜視図。
【図16】(a)(b)(c)は第8の実施形態におけるオットマンを模式的に示す側面図。
【図17】(a)(b)は第9の実施形態におけるオットマンのフットを模式的に示す斜視図。
【図18】(a)(b)(c)は第10の実施形態におけるオットマンのレッグを模式的に示す正面図。
【図19】(a)(b)は第11の実施形態におけるオットマンのフットを模式的に示す斜視図。
【図20】第12の実施形態におけるオットマンのフットを模式的に示す斜視図。
【発明を実施するための形態】
【0025】
(第1の実施形態)
以下、本発明の椅子型マッサージ機を具体化した第1の実施形態を、図1〜図5に従って説明する。なお、以下における本明細書中の説明において、「前後方向」とは椅子型マッサージ機に着座した使用者を基準とした方向に該当する方向である。また、「幅方向」とは使用者の左右方向に該当する方向であり、「上下方向」とは椅子型マッサージ機が設置される設置面と直交する方向に該当する方向であるものとする。
【0026】
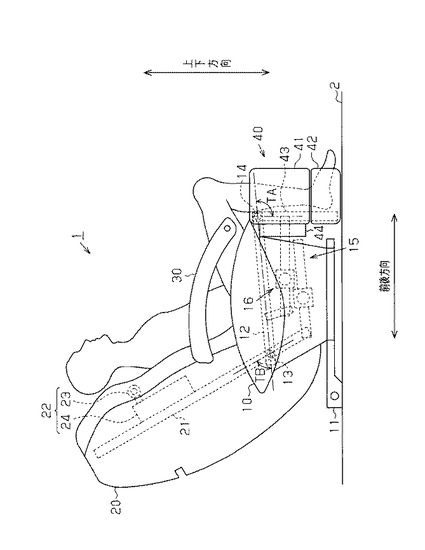
図1に示すように、本実施形態の椅子型マッサージ機1は、使用者の臀部を支持するための座部10を備えている。この座部10の後側(図1では左側)には、使用者の背中を支持するための背もたれ部20が、座部10に対して回動可能に設けられている。また、座部10の幅方向(図1では紙面と直交する方向)における両側には、使用者の腕を保持するための肘掛30が設けられている。さらに、座部10の前側(図1では右側)には、使用者の脚部を支持するためのオットマン(脚揺動装置)40が、座部10に対して回動可能に設けられている。
【0027】
次に、座部10について説明する。
座部10は、幅方向における両側に配置される一対の支持脚11によって設置面2上に設置されている。こうした座部10内には、座部10の骨格を構成する座フレーム12が前後方向に延びるように設けられている。座フレーム12の後端及び前端には、幅方向に延びる回転軸13,14がそれぞれ設けられている。また、座部10内には、座部10に対する背もたれ部20の回転角度TBを調整する第1角度調整機構15と、座部10に対するオットマン40の回転角度TAを調整する第2角度調整機構16とが設けられている。
【0028】
次に、背もたれ部20について説明する。
背もたれ部20内には、座部10内まで延びる背フレーム21が設けられている。この背フレーム21において座部10内に位置する部分は、座フレーム12の後端に設けられた回転軸13に回転自在に連結されている。また、背フレーム21において座部10内に位置する部分には、第1角度調整機構15が動力伝達可能に連結されている。そして、第1角度調整機構15で発生した駆動力が背フレーム21に伝達されることにより、座部10に対する背もたれ部20の回転角度TBが調整される。
【0029】
また、背もたれ部20の幅方向の中央部には、使用者の腰、背中、肩及び首を施術する揉み玉機構22が設けられている。この揉み玉機構22には、身体に接触する揉み玉23と、揉み玉23を駆動させるアクチュエータ24とが設けられている。
【0030】
次に、オットマン40について説明する。
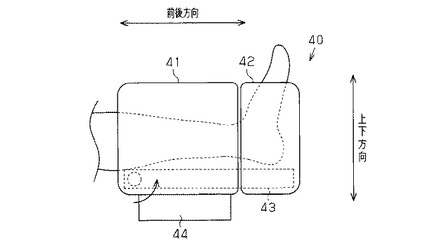
オットマン40は、座部10に着座した使用者の脚部のうち下腿部分を支持するための下腿支持手段としてのレッグ41と、足先部分を支持するための足先支持手段としてのフット42とを備えている。本実施形態において、「下腿部分」とは使用者の脚部において膝から足首までの部分を示し、「足先部分」とは脚部において足首から先の部分を示している。
【0031】
こうしたオットマン40には、レッグ41及びフット42を連結する脚フレーム(連結手段)43が設けられている。この脚フレーム43の一端は、座部10内まで延びており、座フレーム12の前端に設けられた回転軸14に回転自在に連結されている。また、脚フレーム43には、第2角度調整機構16が動力伝達可能に連結されている。そして、図1及び図2に示すように、第2角度調整機構16で発生した駆動力が脚フレーム43に伝達されることにより、座部10に対するオットマン40の回転角度TAが調整される。
【0032】
また、本実施形態のオットマン40には、レッグ41の背面側(図1では左側であって、図2では下側)に配置される揺動装置(揺動手段)44が設けられている。この揺動装置44は、モータなどの図示しないアクチュエータと、該アクチュエータで発生した動力をオットマン40に伝達する図示しない伝達機構とを有している。こうした揺動装置44の駆動によって、オットマン40は、座部10に対して幅方向に揺動するようになっている。つまり、レッグ41及びフット42は、脚フレーム43に対して幅方向に往復移動可能に連結されている。
【0033】
ただし、揺動装置(揺動手段)44によるオットマン40の揺動方向については、幅方向以外の他の方向であってもよい。例えば、オットマン40の揺動方向は、上下方向であってもよいし、第1の方向に延びる軸線を中心とした回転方向であってもよい。また、揺動のパターンについても、複数の方向(幅方向、上下方向及び回転方向)を任意に組み合わせたパターンであってもよい。なお、揺動のパターンについては、予め複数種類用意しておき、操作部82の操作によって使用者に選択させてもよい。
【0034】
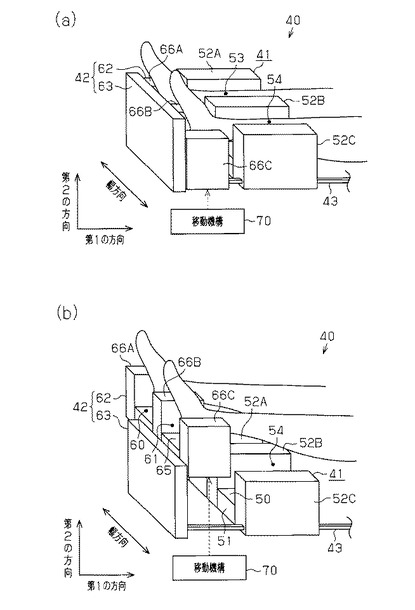
次に、レッグ41及びフット42の構成について説明する。なお、本実施形態でいう「ふくらはぎ」とは、下腿部分における背面側の部位のことを示している。
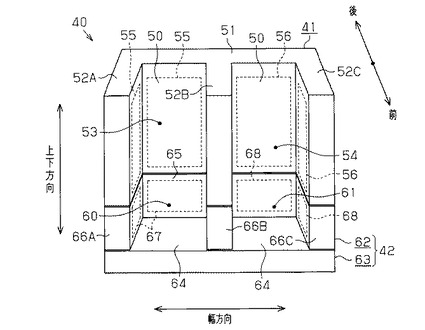
図3に示すように、レッグ41は、使用者のふくらはぎを支持する支持面50を有するレッグ本体51を備えている。このレッグ本体51の幅方向における中央及び両端の各位置には、支持面50から前側に突出する壁部52A,52B,52Cがそれぞれ設けられている。そして、幅方向における一方側(図3では左側)に位置する壁部52Aと中央に位置する壁部52Bによって、使用者の右脚の下腿部分を収容する右下腿収容部53が形成されている。また、幅方向における他方側(図3では右側)に位置する壁部52Cと中央に位置する壁部52Bによって、使用者の左脚の下腿部分を収容する左下腿収容部54が形成されている。
【0035】
また、レッグ本体51、壁部52A及び壁部52Bにおいて右下腿収容部53に対向する各部分には、右下腿収容部53内に収容された使用者の右下腿部分を押圧施術するためのエアバッグ(押圧施術手段)55がそれぞれ設けられている。同様に、レッグ本体51、壁部52B及び壁部52Cにおいて左下腿収容部54に対向する各部分には、左下腿収容部54内に収容された使用者の左下腿部分を押圧施術するためのエアバッグ(押圧施術手段)56がそれぞれ設けられている。
【0036】
フット42は、使用者の右の足先部分が収容される右足先収容部60及び左の足先部分が収容される左足先収容部61を有するフット本体部62と、フット本体部62を挟んでレッグ41の反対側に位置する足裏支持部63とを備えている。足裏支持部63には、使用者の足裏に対向する対向面64が形成されている。
【0037】
フット本体部62は、足先部分のうちかかと側に対向する対向部65を有している。この対向部65の幅方向における中央及び両端の各位置には、前側に突出する壁部66A,66B,66Cがそれぞれ設けられている。そして、対向部65、壁部66A及び壁部66Bによって右足先収容部60が形成されると共に、対向部65、壁部66B及び壁部66Cによって左足先収容部61が形成される。また、壁部66A及び壁部66Bにおいて右足先収容部60に対向する各部分には、右足先収容部60内に収容された使用者の右の足先部分を押圧施術するためのエアバッグ67がそれぞれ設けられている。同様に、壁部66B及び壁部66Cにおいて左足先収容部61に対向する各部分には、左足先収容部61内に収容された使用者の左の足先部分を押圧施術するためのエアバッグ68がそれぞれ設けられている。
【0038】
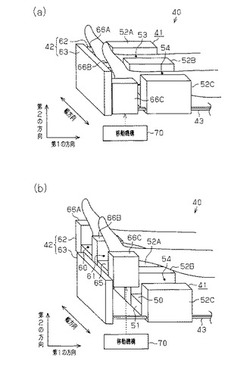
本実施形態のフット42には、図4(a)(b)に示すように、レッグ41に対してフット本体部62を相対移動させるための移動機構70が設けられている。この移動機構70は、モータなどの図示しないアクチュエータと、該アクチュエータで発生した動力をフット本体部62に伝達するための図示しない伝達機構とを有している。こうした移動機構70の駆動によって、フット本体部62は、レッグ41、フット本体部62及び足裏支持部63の並ぶ第1の方向(図4では左右方向)と直交(交差)する第2の方向(図4では上下方向)にスライド移動可能となっている。この第2の方向は、上記レッグ本体51の支持面50と直交(交差)する方向である。
【0039】
そして、フット本体部62が図4(a)に示す第1の位置に位置する場合、足先部分がフット本体部62で支持される使用者の下腿部分は、レッグ41によって支持されている。すなわち、使用者の両ふくらはぎは、レッグ41の支持面50によって支持されている。その一方で、フット本体部62が図4(b)に示す第2の位置に位置する場合、足先部分がフット本体部62で支持される使用者の下腿部分は、レッグ41によって支持されない。すなわち、使用者の両ふくらはぎは、レッグ41の支持面50から離間している。
【0040】
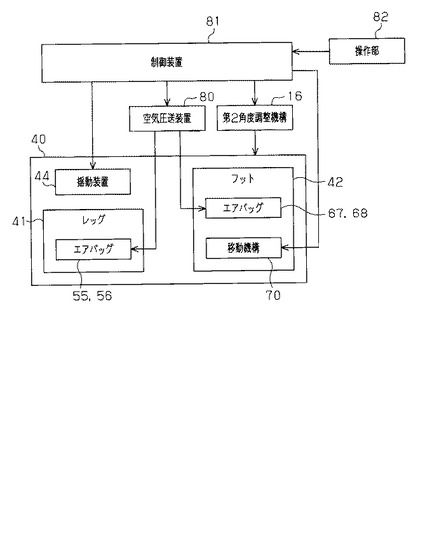
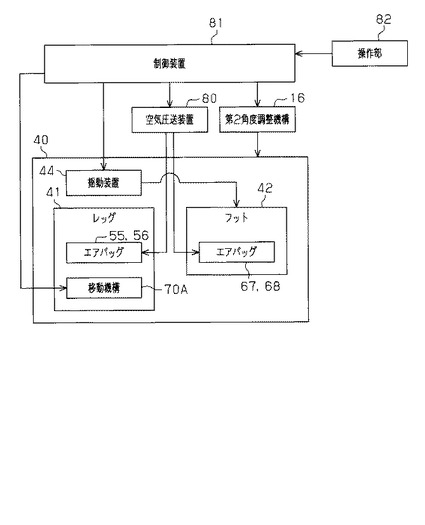
次に、本実施形態の椅子型マッサージ機1の電気的構成について説明する。なお、図5には、使用者の脚部に対する施術(押圧施術、揺動施術)に必要な部分が中心に図示されている。
【0041】
図5に示すように、椅子型マッサージ機1には、オットマン40を揺動させるための揺動装置44と、オットマン40に設けられる各エアバッグ55,56,67,68内の空気圧を個別に調整するための空気圧送装置80と、上記回転角度TAを調整する第2角度調整機構16と、揺動装置44、空気圧送装置80及び第2角度調整機構16を制御する制御装置81とが設けられている。
【0042】
空気圧送装置80は、空気をエアバッグ55,56,67,68内に圧送すべく駆動する圧送ポンプ(図示略)と、エアバッグ55,56,67,68毎に設けられる複数の電磁弁(図示略)とを備えている。これら各電磁弁は、例えば、エアバッグ55,56,67,68内の空気圧を保持する際には閉弁状態にされ、空気圧を変動させる際(例えば、増圧又は減圧させる際)には開弁状態にされる。
【0043】
制御装置81は、図示しないCPU、ROM及びRAMなどで構成されるデジタルコンピュータを備えている。そして、制御装置81は、使用者による操作部82の操作に基づき、揺動装置44、空気圧送装置80及び第2角度調整機構16に加え、フット本体部62を移動させるための移動機構70を適宜制御する。
【0044】
例えば、使用者の脚部に押圧施術を施す場合、制御装置81は、揺動装置44の駆動を禁止すると共に、空気圧送装置80を駆動させる。つまり、制御装置81は、オットマン40に設けられる各エアバッグ55,56,67,68内の空気圧を調整することにより、脚部に対して押圧施術を行う。このとき、フット本体部62は、第1の位置に位置している。
【0045】
また、使用者の脚部に揺動施術を施す場合、制御装置81は、移動機構70を駆動させてフット本体部62を第1の位置から第2の位置に移動させ、その後、揺動装置44を駆動させる。
【0046】
次に、本実施形態の椅子型マッサージ機1を使用する使用者の脚部に対して揺動施術を施す際の作用について説明する。
さて、揺動施術を施す場合、第2角度調整機構16の駆動によって、オットマン40は、座部10に着座する使用者のふくらはぎが設置面2に対向した状態になるまで回転する(図2参照)。すると、フット42に設けられた移動機構70の駆動によって、フット本体部62が、第1の位置から第2の位置まで移動する(図4参照)。
【0047】
その結果、足先部分がフット本体部62に支持される使用者の下腿部分の大部分又は全体は、レッグ41の外側(図4(b)ではレッグ41の上側)に位置するようになる。つまり、足先部分がフット本体部62に支持される使用者のふくらはぎは、レッグ41の支持面50から離間される。また、使用者の下腿部分における幅方向(規定の方向)の両側が、レッグ41の壁部52A,52B,52Cに接触しなくなる。
【0048】
この状態で揺動装置44が駆動すると、使用者の足先部分を支持するフット本体部62が揺動する。その結果、使用者の脚部には、足先部分がフット本体部62に支持された状態で揺動施術が施される。この場合、使用者の下腿部分とレッグ41との接触が抑制される。そのため、フット本体部62を第1の位置に配置した状態で揺動施術を施す場合と比較して、使用者の下腿部分とレッグ41との接触による不快感が抑制されると共に、使用者のふくらはぎの揺れが阻害されなくなる。その結果、オットマン40の揺動によるマッサージ感が向上する。
【0049】
なお、揺動施術を施す場合、フット本体部62の各壁部66A,66B,66Cに設けられるエアバッグ67を膨張させてもよい。この場合、フット本体部62の各収容部60,61に収容される使用者の足先部分が幅方向における両側に配置されるエアバッグ67によって挟持され、この状態で、使用者の脚部に対して揺動施術が施される。
【0050】
以上説明したように、本実施形態では、以下に示す効果を得ることができる。
(1)揺動装置44の駆動時には、足先部分がフット42に支持される使用者の下腿部分の大部分又は全部が、レッグ41外に位置している。そのため、揺動装置44の駆動によって使用者の脚部に揺動施術を施す場合には、下腿部分がレッグ41に接触する可能性が低くなる。したがって、使用者の脚部を揺動させることによるマッサージ感を向上させることができる。
【0051】
(2)本実施形態では、使用者の両下腿部分において揺動方向の外側に位置する部分とレッグ41との接触が抑制される。そのため、フット本体部62が第1の位置に位置する状態で揺動施術を行う場合と比較して、揺動施術時における脚部の振れ幅を広くすることができる。その結果、揺動施術によるマッサージ感を向上させることができる。
【0052】
(3)さらに、本実施形態では、フット本体部62とレッグ41との相対的な位置関係を変更させている。すなわち、フット本体部62とレッグ41とが第1の位置関係にある場合には、レッグ41によって使用者の下腿部分を支持することができる。そのため、レッグ41に設けられたエアバッグ55,56を用いることにより、下腿部分に対して押圧施術を施すことができる。一方、フット本体部62とレッグ41とが第2の位置関係にある場合には、使用者の下腿部分は、レッグ41外に位置している。つまり、使用者のふくらはぎは、レッグ41の支持面50から離間している。こうした第1の位置関係から第2の位置関係への変化を、使用者の脚部をオットマン40で支持したままの状態で行うことができる。したがって、位置関係を変化させる場合に脚部をオットマン40から離間させるという使用者の手間を省くことができる。
【0053】
(4)より具体的には、移動機構70の駆動によって、フット本体部62を第1の位置と第2の位置との間で移動させるという簡単な構成で、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0054】
(第2の実施形態)
次に、本発明の第2の実施形態を図6及び図7に従って説明する。なお、第2の実施形態は、フットとレッグとの位置関係の変更方法が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1の実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0055】
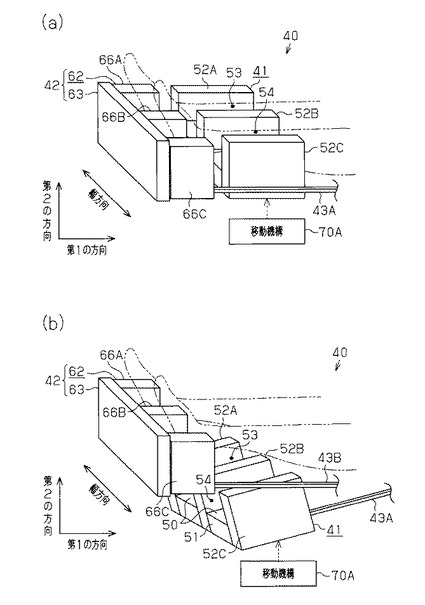
図6(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40は、レッグ(下腿支持手段)41及びフット(足先支持手段)42を備えている。これらレッグ41及びフット42には、座部10の座フレーム12における前端に設けられた回転軸14に回転可能に接続される接続フレーム43A,43Bが個別に設けられている。そして、上記第2角度調整機構16が駆動した場合、レッグ41及びフット42は、座部10に対して共に回動するようになっている。
【0056】
本実施形態のオットマン40には、レッグ41を、フット42に対して移動させるための移動機構70Aが設けられている。つまり、本実施形態では、上記第1の実施形態の場合とは逆に、レッグ41をフット42に対して移動させることにより、レッグ41とフット42との位置関係を異ならせている。
【0057】
具体的には、レッグ41が図6(a)に示す第1の位置に位置する場合、レッグ41、フット本体部62及び足裏支持部63が第1の方向に沿って並置されている。すなわち、レッグ41、フット本体部62及び足裏支持部63は、第2の方向において同一位置に位置している。そのため、足先部分がフット42に支持される使用者の両下腿部分は、レッグ41に設けられる両下腿収容部53,54内に収容される。一方、レッグ41が図6(b)に示す第2の位置に位置する場合、レッグ41は、第2の方向においてフット本体部62及び足裏支持部63とは異なる位置に位置するようになっている。具体的には、レッグ41は、図6においてフット本体部62及び足裏支持部63の下側に位置している。その結果、足先部分がフット42に支持される使用者の両下腿部分は、レッグ41外に位置するようになる。
【0058】
このようにレッグ41は、移動機構70Aによって、支持面50で使用者のふくらはぎを支持可能な第1の位置と、使用者のふくらはぎから支持面50を離間させる第2の位置との間で移動する。そして、レッグ41を第2の位置に配置した状態で揺動装置(揺動手段)44が駆動することにより、揺動施術時に使用者の下腿部分とレッグ41との接触が抑制される。なお、本実施形態では、揺動装置44は、レッグ41及びフット42のうち少なくともフット42を揺動させることができるように構成されている。
【0059】
以上説明したように、本実施形態では、第1の実施形態における効果(1)〜(3)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(5)本実施形態では、移動機構70Aの駆動によって、レッグ41を第1の位置と第2の位置との間で移動させるという簡単な構成で、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0060】
(第3の実施形態)
次に、本発明の第3の実施形態を図8に従って説明する。なお、第2の実施形態は、レッグ及びフットの位置関係を変更させない点で第1及び第2の各実施形態と異なっている。したがって、以下の説明においては、第1及び第2の各実施形態と相違する部分について主に説明するものとし、第1及び第2の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0061】
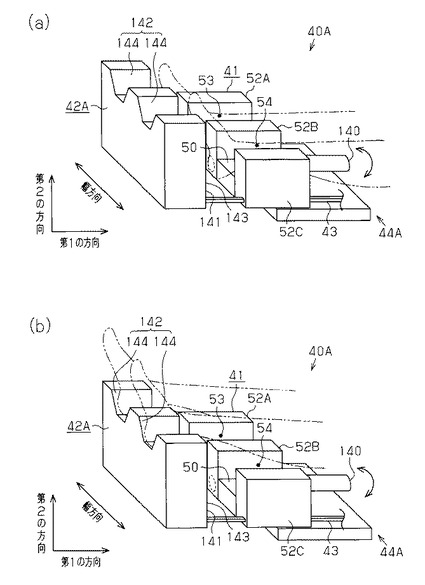
図8(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Aでは、揺動装置(揺動手段)44Aからの駆動力を伝達するための伝達軸140がレッグ(下腿支持手段)41に接続されている。そして、この伝達軸140が回転方向における一方側及び他方側に回転することにより、レッグ41及びフット(足先支持手段)42Aが矢印方向に揺動するようになっている。
【0062】
また、本実施形態のフット42Aには、レッグ41の支持面50に直交(交差)する第2の方向において互いに異なる位置に配置される第1の支持部141と第2の支持部142とが設けられている。第1の支持部141は、使用者の足裏を支持する足裏支持面143を有している。そして、第1の支持部141によって足先部分が支持される場合、該足先部分を有する使用者の両下腿部分は、レッグ41によって支持されている(図8(a)参照)。
【0063】
第2の支持部142は、図8において第1の支持部141よりも上側に位置している。こうした第2の支持部142には、使用者の足先部分におけるかかと側を支持する一対のかかと支持用凹部144が設けられている。これら両かかと支持用凹部144は、幅方向において互いに異なる位置に配置されている。そして、第2の支持部142によって足先部分が支持される場合、該足先部分を有する使用者の両下腿部分は、レッグ41によって支持されない(図8(b)参照)。すなわち、使用者のふくらはぎは、レッグ41の支持面50から離間している。
【0064】
このように第2の支持部142に足先部分が支持された状態で揺動装置44Aを駆動させることにより、揺動施術時に使用者の両下腿部分とレッグ41との接触が抑制される。
以上説明したように、本実施形態では、第1及び第2の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
【0065】
(6)本実施形態のフット42Aには、押圧施術時用の第1の支持部141と、揺動施術時用の第2の支持部142とが予め用意されている。そのため、フット42Aとレッグ41との位置関係を変更させるための移動機構などを設ける必要がない。つまり、オットマン40Aにおける可動機構を簡略化させることができる。
【0066】
(第4の実施形態)
次に、本発明の第4の実施形態を図9〜図11に従って説明する。なお、第4の実施形態は、フットの構成が第3の実施形態と異なっている。したがって、以下の説明においては、第3の実施形態と相違する部分について主に説明するものとし、第1〜第3の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0067】
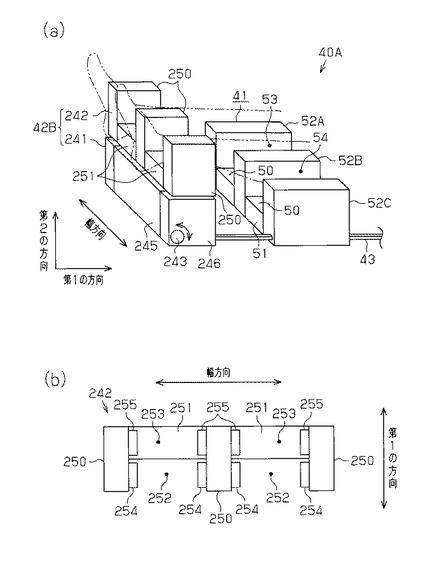
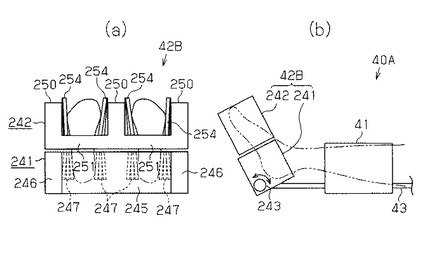
図9(a)に示すように、本実施形態のオットマン(脚揺動装置)40Aに設けられるフット(足先支持手段)42Bは、第2の方向に沿って並置される第1の支持部241と第2の支持部242とを備えている。第1の支持部241は、第2の方向においてレッグ(足先支持手段)41と同一位置に配置されている。こうした第1の支持部241は、図10(a)(b)に示すように、レッグ41に対して、幅方向に延びる軸部243を介して回転可能に連結されている。
【0068】
また、第1の支持部241は、使用者の足先部分におけるかかと側を支持する支持部材245を有している。この支持部材245の幅方向における両端部及び中央には、壁部246がそれぞれ設けられている。なお、図10(a)では、中央に位置する壁部の図示が省略されている。そして、幅方向において互いに隣り合う壁部246同士の間に形成された収容部に、使用者の足先部分におけるかかと側が収容される。また、各壁部246には、上記収容部に収容された足先部分を幅方向における両側から挟持するためのエアバッグ247がそれぞれ設けられている。これらエアバッグ247は、使用者の足先部分の押圧施術時においては幅方向に伸縮動作するようになっている。
【0069】
図9(a)(b)に示すように、第2の支持部242は、幅方向において第1の支持部241を構成する各壁部246に対応する各位置に配置される3つの壁部250を有している。幅方向において互いに隣り合う壁部250同士は、連結部251によって連結されている。この連結部251は、第1の方向においてレッグ41から離間した側であって、且つ第2の方向において第1の支持部241に近い側の位置に配置されている。
【0070】
そして、第2の支持部242において第1の方向におけるレッグ41に近い側(図9(b)では下側)は、第1の支持部241にかかと側が支持される足先部分におけるつま先側を支持するつま先支持部位252となっている。つまり、第1の支持部241で足先部分を支持する場合、足先部分におけるかかと側は第1の支持部241で支持されると共に、つま先側は第2の支持部242で支持される。
【0071】
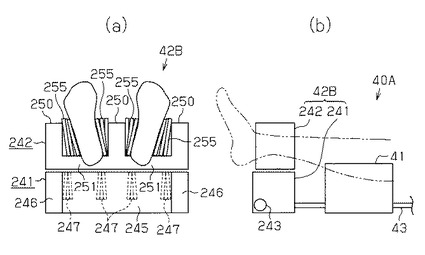
また、第2の支持部242において第1の方向におけるレッグ41から離間した側(図9(b)では上側)は、足先部分におけるかかと側を支持するかかと支持部位253となっている。そして、かかと支持部位253で足先部分を支持する場合、図11(a)(b)に示すように、足先部分におけるかかと側が第2の支持部242の連結部251に載置されるようになっている。このように第2の支持部242で使用者の足先部分を支持する場合、該使用者のふくらはぎは、レッグ41の支持面50から離間した状態になる。
【0072】
なお、本実施形態において、第2の支持部242のつま先支持部位252には、足先部分のうちつま先支持部位252で支持する部位を幅方向における両側から挟持するためのエアバッグ254が設けられている(図10(a)参照)。同様に、第2の支持部242のかかと支持部位253には、足先部分のうちかかと支持部位253で支持する部位を幅方向における両側から挟持するためのエアバッグ255が設けられている(図11(a)参照)。こうした各エアバッグ254,255は、第2の支持部242を構成する各壁部250に設けられている。
【0073】
そして、第2の支持部242のかかと支持部位253で使用者の足先部分を支持させる状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0074】
以上説明したように、本実施形態では、第1〜第3の各実施形態における効果(1)(2)(6)と同等の効果を得ることができる。
なお、オットマン40の全体(レッグ41及びフット42B)を揺動させるのではなく、揺動装置44の駆動によって上記第2の支持部242のみを揺動させるようにしてもよい。この場合、揺らす対象が小型且つ軽量になる分、揺動装置44を小型化させることができる。このように揺動装置44が小型化されると、該揺動装置44を第1の支持部241内又は図10(a)において第1の支持部241の下側に配置することが可能となる。
【0075】
(第5の実施形態)
次に、本発明の第5の実施形態を図12に従って説明する。なお、第5の実施形態は、フットを複数設ける点が第3及び第4の各実施形態と異なっている。したがって、以下の説明においては、第3及び第4の各実施形態と相違する部分について主に説明するものとし、第1〜第4の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0076】
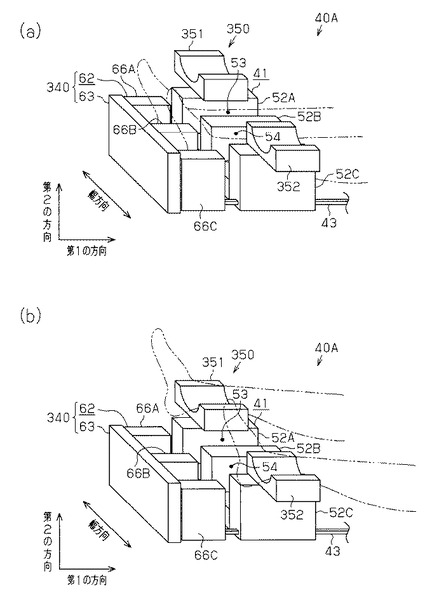
図12(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Aは、第1のフット(第1の支持部)340と第2のフット(第2の支持部)350とを備えている。つまり、本実施形態では、第1及び第2の各フット340,350により、足先支持手段が構成される。第1のフット340は、レッグ(下腿支持手段)41を挟んで座部10の反対側(図12では左側)に配置されている。そして、第1のフット340で足先部分を支持する場合、使用者の下腿部分は、レッグ41によって支持される。
【0077】
第2のフット350は、レッグ41を構成する壁部52A,52Cの先端(図12では上端)に配置されている。具体的には、第2のフット350において壁部(一方の壁部)52Aの先端に配置される部位は、使用者の右の足先部分を支持する右脚用の支持部位351となっている。また、第2のフット350において壁部(他方の壁部)52Cの先端に配置される部位は、使用者の左の足先部分を支持する左脚用の支持部位352となっている。そして、第2のフット350で足先部分を支持する場合、使用者の下腿部分は、レッグ41によって支持されない。そして、この状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0078】
以上説明したように、本実施形態では、第1〜第4の各実施形態における効果(1)(2)(6)と同等の効果を得ることができる。
(第6の実施形態)
次に、本発明の第6の実施形態を図13に従って説明する。なお、第6の実施形態は、フットの構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第5の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0079】
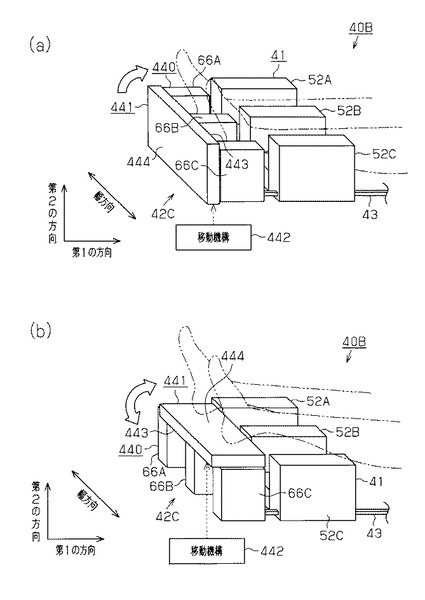
図13(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Bに設けられるフット(足先支持手段)42Cは、フット本体部(本体部)440及び足裏支持部(可動部材)441に加え、足裏支持部441をフット本体部440に対して移動させるための移動機構442をさらに備えている。本実施形態において、足裏支持部441は、図13(a)に示す第1の位置と、図13(b)に示す第2の位置とに設置可能となっている。第1の位置は、フット本体部440を挟んだレッグ41の反対側のことである。また、第2の位置は、フット本体部440の第2の方向における一方側(図13では上側)のことである。
【0080】
足裏支持部441において使用者の足裏に対向する対向面(対向部)443は、足裏支持部441が第1の位置に位置する場合には使用者の足裏に対向している。そして、フット本体部440に足先部分が支持される使用者の下腿部分は、レッグ41によって支持される。
【0081】
一方、足裏支持部441が第2の位置に位置する場合、対向面443は、フット本体部440に対向している。そして、足裏支持部441において対向面443の反対側に位置する載置部の一例としての載置面(図13では上面)444に、使用者の足先部分が載置される。この場合、足裏支持部441の載置面444で足先部分を支持させることにより、使用者の下腿部分は、レッグ41によって支持されない。そして、この状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0082】
以上説明したように、本実施形態では、第1〜第5の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(7)本実施形態では、移動機構442の駆動によって、足裏支持部441が第1の位置から第2の位置に移動させる。そして、第2の位置に設置される足裏支持部441の載置面444に足先部分を載置(支持)させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0083】
なお、移動機構442の駆動によって、フット本体部440及び足裏支持部441を含むフット42C全体を、幅方向に延びる軸線を中心に回転させるようにしてもよい。このように構成しても、上記(7)と同等の効果を得ることができる。
【0084】
(第7の実施形態)
次に、本発明の第7の実施形態を図14及び図15に従って説明する。なお、第7の実施形態は、フットの構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第6の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0085】
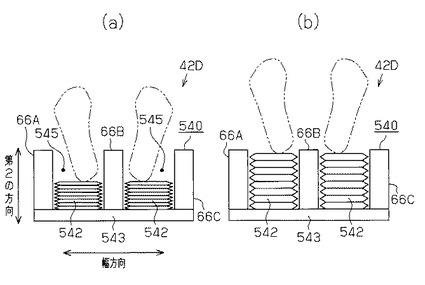
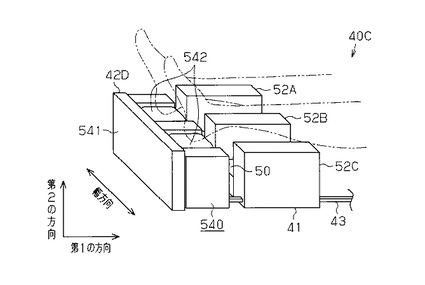
図14及び図15に示すように、本実施形態のオットマン(脚揺動装置)40Cに設けられたフット(足先支持手段)42Dには、フット本体部540と、足裏支持部541とが設けられている。フット本体部540には、図14(a)(b)に示すように、該フット本体部540で支持する使用者の足先部分の第2の方向における位置を変更すべく作動するエアバッグ(押出手段)542が設けられている。より具体的には、エアバッグ542は、フット本体部540において足先部分のうちかかと側に対向する対向部543に、第2の方向に沿って伸縮するように配置されている。
【0086】
そして、エアバッグ542が収縮している場合、使用者の足先部分の大部分は、フット本体部540の収容部545内に収容されている(図14(a)参照)。この場合、使用者の下腿部分は、レッグ(下腿支持手段)41に支持されている。
【0087】
一方、エアバッグ542が膨張した場合、使用者の足先部分の大部分は、フット本体部540の収容部545から外部(より詳しくは、図14における上側)に押し出される(図14(b)及び図15参照)。この場合、使用者の下腿部分は、レッグ41によって支持されない。すなわち、エアバッグ542が膨張すると、使用者のふくらはぎは、第2の方向においてレッグ41の支持面50から離間するようになっている。そして、この状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0088】
以上説明したように、本実施形態では、第1〜第6の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(8)本実施形態では、フット42Cに設けられたエアバッグ542の伸縮度合を調整させることにより、レッグ41と使用者の下腿部分との位置関係を変更させることができる。すなわち、エアバッグ542を膨張させることにより、使用者の足先部分を第2の方向に移動させ、結果として、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0089】
(第8の実施形態)
次に、本発明の第8の実施形態を図16に従って説明する。なお、第8の実施形態は、フットの構成が第7の実施形態と異なっている。したがって、以下の説明においては、第7の実施形態と相違する部分について主に説明するものとし、第1〜第6の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0090】
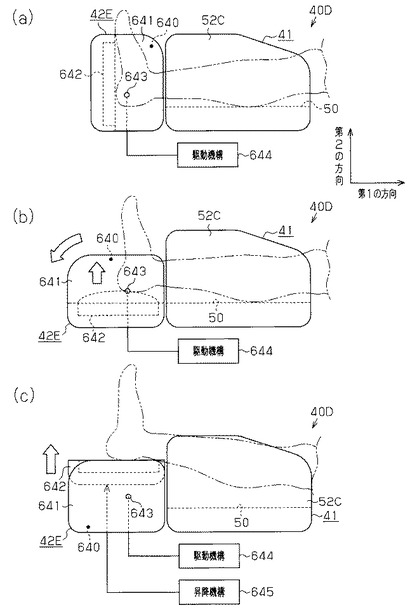
図16(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Dに設けられたフット(足先支持手段)42Eは、使用者の足先部分の大部分が収容される収容部640を有するフット本体部641と、収容部640内において使用者の足先部分の足裏に対向する対向部の一例としての対向部材642とを有している。こうしたフット42Eには、幅方向に延びる回転軸643を中心に、レッグ(下腿支持手段)41に対して回転させるための駆動機構(回転機構)644が設けられている。具体的には、フット42Eは、対向部材642が足裏に対向する第1の回転位置(図16(a)参照)と、対向部材642が足先部分のかかと側に対向する第2の回転位置(図16(b)参照)との間で回転するようになっている。
【0091】
また、本実施形態のフット42Eには、図16(c)に示すように、フット42Eが第2の回転位置に位置する場合に、対向部材642を第2の方向に進退移動させるべく駆動する昇降機構(押出手段)645が設けられている。対向部材642が図16(b)に示す非揺動時位置に位置する場合、使用者のふくらはぎは、レッグ41の支持面50で支持される。一方、対向部材642が図16(c)に示す揺動時位置に位置する場合、使用者のふくらはぎは、レッグ41の支持面50から離間する。
【0092】
つまり、昇降機構645の駆動によって対向部材642が非揺動時位置から揺動時位置にスライド移動すると、フット42Eで足先部分が支持される使用者のふくらはぎは、レッグ41の支持面50から離間していく。そして、この状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0093】
以上説明したように、本実施形態では、第1〜第6の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(9)本実施形態では、対向部材642を変位させることにより、レッグ41と使用者の下腿部分との位置関係を変更させることができる。その結果、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0094】
(第9の実施形態)
次に、本発明の第9の実施形態を図17に従って説明する。なお、第9の実施形態は、フット及びレッグを共に回転させるための構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第8の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0095】
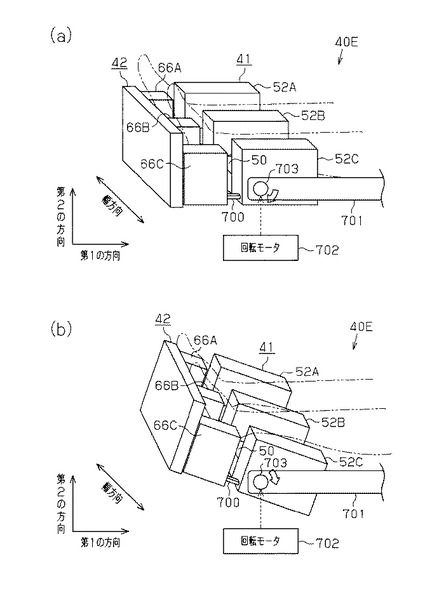
図17(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Eに設けられたレッグ(下腿支持手段)41及びフット(足先支持手段)42は、連結手段としての連結部材700によって連結されている。また、レッグ41は、座部10から延設された延設部材701の先端に対して回動可能に連結されている。本実施形態のオットマン40Eは、回転機構を構成する回転モータ702からの駆動力によって、幅方向に延びる回転軸(軸線)703を中心に回転するようになっている。
【0096】
そして、図17(a)に示すように、前後方向と第1の方向とが一致する場合、フット42で使用者の足先部分が支持されると、該使用者の下腿部分がレッグ41によって支持される。一方、図17(a)の状態からフット42が上方に変位するようにオットマン40Eを回動させた場合、図17(b)に示すように、足先部分がフット42に支持される使用者の下腿部分は、レッグ41によって支持されなくなる。この状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0097】
以上説明したように、本実施形態では、第1〜第7の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(10)本実施形態では、延設部材701の先端を中心にオットマン40Eを回動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0098】
(第10の実施形態)
次に、本発明の第10の実施形態を図18に従って説明する。なお、第10の実施形態は、レッグの構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第9の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0099】
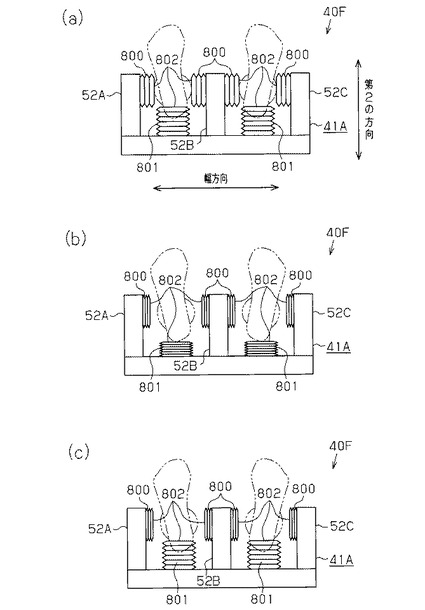
図18(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Fに設けられたレッグ(下腿支持手段)41Aには、使用者の下腿部分を幅方向における両側から挟持するためのエアバッグ(変位手段)800と、使用者のふくらはぎを押圧するためのエアバッグ(変位手段)801とが設けられている。そして、フット42に足先部分が支持された状態で各エアバッグ800,801が膨張した場合、図18(a)に示すように、レッグ41Aの支持面(本実施形態では、各エアバッグ800,801の先端の面)802に、使用者の下腿部分が接触する。この状態で各エアバッグ800,801内の空気圧を調整することにより、レッグ41Aで支持される使用者の下腿部分に対して押圧施術が施される。つまり、本実施形態においては、押圧施術手段として機能するエアバッグ800,801が、変位手段としても機能する。
【0100】
一方、各エアバッグ800,801が収縮した場合、図18(b)に示すように、レッグ41Aの支持面802は、使用者の下腿部分から離間される。つまり、使用者の下腿部分は、レッグ41Aによって支持されていない。そして、この状態で揺動装置(揺動手段)44が駆動する場合、揺動施術される使用者の下腿部分とレッグ41Aとの接触が抑制される。
【0101】
なお、レッグ41Aに設けられる各エアバッグ800,801は個別に伸縮制御される。そのため、揺動施術時には、図18(c)に示すように、使用者の下腿部分を幅方向における両側から挟持するためのエアバッグ800を収縮させ、使用者のふくらはぎを押圧するためのエアバッグ801の膨張状態を維持させてもよい。この場合であっても、ふくらはぎがレッグ41Aに接触する場合と比較して、揺動施術時におけるマッサージ感を向上させることができる。
【0102】
以上説明したように、本実施形態では、第1〜第8の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(11)本実施形態では、下腿部分の押圧施術に用いるエアバッグ800,801の伸縮態様を調整することにより、揺動施術時における使用者の下腿部分とレッグ41Aとの接触を抑制することができる。
【0103】
(12)また、レッグ41Aやフット42を移動させるための機構を備えなくてもよく、さらには押圧施術手段でもあるエアバッグ800,801が変位手段を兼ねている。そのため、オットマン40Fの構成を簡略化させることができる。
【0104】
(第11の実施形態)
次に、本発明の第11の実施形態を図19に従って説明する。なお、第11の実施形態は、レッグの構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第10の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0105】
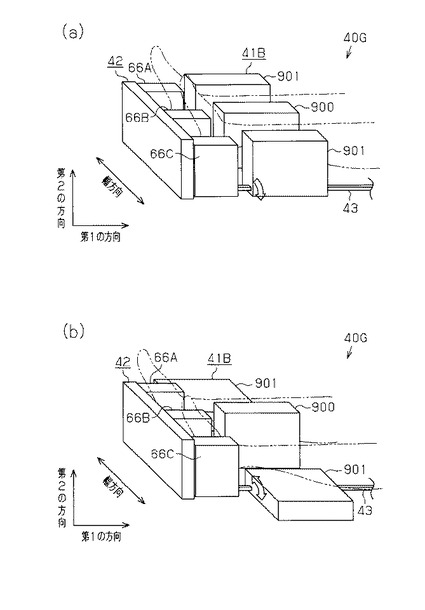
図19(a)(b)に示すように、本実施形態におけるオットマン(脚揺動装置)40Gに設けられたレッグ(下腿支持手段)41Bは、幅方向における中央に配置される壁部900を備えている。また、この壁部900の幅方向における両側には、脚フレーム(連結手段)43に対して回動可能に連結される可動壁901がそれぞれ設けられている。これら各可動壁901は、レッグ41Bに収容される使用者の下腿部分を支持可能な第1の位置(図19(a)に示す位置)と、下腿部分から離間する第2の位置(図19(b)に示す位置)との間で移動可能となっている。なお、各可動壁901は、図示しない移動機構の駆動によって回動するように構成されている。
【0106】
そして、各可動壁901が第2の位置に配置された状態で揺動装置(揺動手段)44が駆動すると、使用者の下腿部分において外側に位置する部分が、レッグ41Bに接触しない。その結果、使用者の下腿部分において外側に位置する部分がレッグ41Bに接触する場合と比較して、揺動施術によるマッサージ感を向上させることができる。
【0107】
以上説明したように、本実施形態では、第1〜第8の各実施形態における効果(1)(2)と同等の効果を得ることができる。
(第12の実施形態)
次に、本発明の第12の実施形態を図20に従って説明する。なお、第12の実施形態は、レッグの構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第11の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0108】
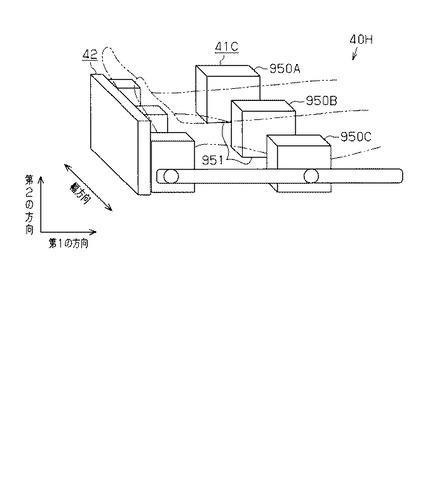
図20に示すように、本実施形態のオットマン(脚揺動装置)40Hに設けられたレッグ(下腿支持手段)41Cは、幅方向に沿って配置される3つの壁部950A,950B,950Cを備えている。これら各壁部950A,950B,950Cは、フット(足先支持手段)42に移動不能に固定されている。こうしたレッグ41Cには、足先部分がフット42に支持される使用者のふくらはぎに対応する位置に開口部951が設けられている。すなわち、本実施形態のレッグ41Cには、使用者のふくらはぎを支持するための支持面が設けられていない。
【0109】
そのため、レッグ41Cに下腿部分が支持された状態で揺動装置(揺動手段)44が駆動しても、使用者のふくらはぎとレッグ41Cとの接触は回避される。したがって、ふくらはぎがレッグ41Cに接触する場合と比較して、揺動施術によるマッサージ感を向上させることができる。
【0110】
以上説明したように、本実施形態では、以下に示す効果を得ることができる。
(13)本実施形態では、ふくらはぎに対応する位置に開口部951が設けられている。そのため、揺動装置44の駆動によって使用者の脚部に揺動施術を施す場合には、使用者のふくらはぎがレッグ41Cに接触しない。したがって、使用者の脚部を揺動させることによるマッサージ感を向上させることができる。
【0111】
(14)しかも、揺動施術を行う前準備として、フット42やレッグ41Cを移動させたり、足先部分を支持させる位置を変更したりするという使用者の手間を省くことができる。
【0112】
なお、上記各実施形態は以下のような別の実施形態に変更してもよい。
・第12の実施形態において、レッグ41Cには、使用者のふくらはぎを支持する支持面を有する支持部材を設けてもよい。こうした構成の場合、オットマン40Hには、当該支持部材を、使用者のふくらはぎから離間させるための機構をさらに設けることが好ましい。
【0113】
・第12の実施形態において、レッグ41Cの幅方向における両端に設けられる壁部52A,52Cは、使用者の下腿部分に当接可能な第1の位置と当接不能な第2の位置との間で移動可能な可動壁であってもよい。
【0114】
・第11の実施形態において、一対の可動壁901の間に配置される壁部900を、第2の方向に移動可能な可動壁としてもよい。この場合、揺動施術時には、壁部900を、使用者の下腿部分に当接不能な位置に退避移動させることができる。
【0115】
・第10の実施形態において、レッグ(下腿支持手段)41Aには、使用者のふくらはぎを押圧するためのエアバッグ801を設けなくてもよい。この場合、レッグ41Aを、使用者のふくらはぎに対向する面(即ち、支持面)がふくらはぎに当接するように構成することが好ましい。
【0116】
・第10の実施形態において、レッグ41Aにおいて幅方向における中央に位置する壁部52Bに設けられたエアバッグ800を、揺動施術時には収縮させなくてもよい。
・第9の実施形態において、フット42に、座部10から延設された連結部材700の先端を回動可能に連結させてもよい。
【0117】
・第7の実施形態において、フット本体部540に設けられたエアバッグ542の膨張量を、膨張によって使用者のふくらはぎをレッグ41の支持面50から離間させることができるのであれば任意の量に設定してもよい。すなわち、エアバッグ542の膨張によって、使用者の足先部分を、フット42D外に押し出さなくてもよい。
【0118】
・第7の実施形態において、押圧手段は、フット本体部540の対向部543を、第2の方向に沿って進退移動させることが可能な構成であればエアバッグ以外の他の任意の機構を備えたものであってもよい。例えば、押出手段は、対向部543を進退移動させるべく駆動するモータなどのアクチュエータを備えた構成であってもよい。
【0119】
・第6の実施形態において、フット42Cの足裏支持部441を、該足裏支持部441が第2の位置に位置する場合に対向面443が載置部として機能するように移動させてもよい。
【0120】
・第6の実施形態において、足裏支持部441を、フット本体部440から取り外し可能に構成してもよい。この場合、足裏支持部441を、フット本体部440に対して第1及び第2の各位置に取り付け可能に構成することが好ましい。
【0121】
・第1の実施形態において、オットマン40を、フット42全体が第2の方向(図2における上下方向)に沿って移動可能となるように構成してもよい。
・第1〜第4及び第6〜第12の各実施形態において、揺動装置44,44Aは、フット42,42A,42B,42C,42D,42Eを揺動させることが可能であれば、レッグ41を揺動させなくてもよい。
【0122】
第5の実施形態において、揺動装置は、レッグ41及び該レッグ41に支持される第2のフット350を揺動させることが可能であれば、第1のフット340を揺動させなくてもよい。
【0123】
・各実施形態において、オットマン40,40A〜40Hを、座部10に対して回転不能としてもよい。
・第1の実施形態において、レッグ41を第2の方向に移動させる移動機構をさらに設けてもよい。
【0124】
・各実施形態において、椅子型マッサージ機は、背もたれ部20を備えない構成であってもよい。また、椅子型マッサージ機は、肘掛30を備えない構成であってもよい。
・各実施形態において、マッサージ機は、脚揺動装置を備えた構成であれば、例えば、ベッド型のマッサージ機であってもよい。この場合、マッサージ機に横たわった使用者の脚部に対して、脚揺動装置によって揺動施術を施すことができる。
【0125】
・上記各実施形態では、脚揺動装置がマッサージ機と一体となっているが、脚揺動装置を、マッサージ機とは別体構成としてもよい。
【符号の説明】
【0126】
1…マッサージ機の一例としての椅子型マッサージ機、10…座部、41,41A〜41C…下腿支持手段の一例としてのレッグ、40,40A〜40H…脚揺動装置の一例としてのオットマン、42,42A〜42E…足先支持手段の一例としてのフット、44,44A…揺動装置、50…支持面、52A,52C…壁部、141,241…第1の支持部、142,242…第2の支持部、55,56…押圧施術手段の一例としてのエアバッグ、70,70A…移動機構、252…つま先支持部位、253…かかと支持部位、340…足先支持手段を構成する第1のフット(第1の支持部)、350…足先支持手段を構成する第2のフット(第1の支持部)、351…右脚用の支持部位、352…左脚用の支持部位、440…本体部の一例としてのフット本体部、441…可動部材としての足裏支持部、443…対向部の一例としての対向面、444…載置部の一例としての載置面、542…押出手段の一例としてのエアバッグ、545…収容部、642…対向部の一例としての対向部材、644…回転機構の一例としての駆動機構、645…押出手段の一例としての昇降機構、700…連結手段の一例としての連結部材、702…回転モータ(回転機構)、800,801…変位手段及び押圧施術手段の一例としてのエアバッグ、901…可動壁、950A〜950C…壁部、951…開口部。
【技術分野】
【0001】
本発明は、使用者の脚部を揺動させる揺動手段を備える脚揺動装置、及び該脚揺動装置を備える椅子型マッサージ機に関する。
【背景技術】
【0002】
従来、座部に着座した使用者の脚部を施術する機能を有するマッサージ機として、例えば特許文献1に記載の椅子型マッサージ機が提案されている。この椅子型マッサージ機において使用者の脚部を支持するオットマンには、脚揺動装置が設けられている。
【0003】
この脚揺動装置は、使用者の脚部における下腿部分を支持する下腿支持部及び使用者の脚部における足先部分を支持する足先支持部を揺動させるべく駆動する揺動機構(揺動手段)を備えている。この揺動機構の駆動によって、オットマンに支持される使用者の脚部に対して揺動施術が施される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−237295号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、使用者の足先部分を足先支持部で支持した状態で揺動機構を駆動させる場合、使用者の下腿部分が下腿支持部に接触し、使用者に不快感を与えるおそれがある。また、揺動速度が高速である程、下腿部分と下腿支持部との接触度合が大きくなり、脚部の揺動に伴うマッサージ感が低下してしまう。
【0006】
本発明は、このような事情に鑑みてなされたものであり、その目的は、使用者の脚部を揺動させることによるマッサージ感を向上させることができるマッサージ機を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の脚揺動装置は、使用者の脚部における下腿部分を支持するための下腿支持手段と、使用者の脚部において下腿部分よりも足先に近い足先部分を支持するための足先支持手段と、前記下腿支持手段によって支持される使用者の下腿部分に対して押圧施術を施すべく駆動する押圧施術手段と、前記足先支持手段によって足先部分が支持される使用者の脚部を揺動させるべく駆動する揺動手段と、を備え、前記揺動手段の駆動によって使用者の脚部を揺動させる場合には、前記足先支持手段によって足先部分が支持される使用者の下腿部分におけるふくらはぎ、及び使用者の脚部が並ぶ方向である規定の方向における両側の少なくとも一部と前記下腿支持手段とを非接触状態にさせることを要旨とする。
【0008】
本発明の脚揺動装置は、前記足先支持手段を前記下腿支持手段に対して相対移動させる移動機構をさらに備え、前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有しており、前記移動機構は、前記足先支持手段と前記下腿支持手段との位置関係が、前記足先支持手段によって足先部分が支持される使用者のふくらはぎを前記下腿支持手段の前記支持面で支持可能となる第1の関係、又は前記足先支持手段によって足先部分が支持される使用者のふくらはぎを前記支持面から離間させる第2の関係となるように、前記足先支持手段を前記下腿支持手段に対して相対移動させることが好ましい。
【0009】
本発明の脚揺動装置において、前記移動機構は、前記足先支持手段を移動させるための機構であり、前記足先支持手段は、該足先支持手段に足先部分が支持される使用者のふくらはぎを前記下腿支持手段の前記支持面で支持可能となる第1の位置と、前記足先支持手段に足先部分が支持される使用者のふくらはぎを前記支持面から離間させる第2の位置との間で移動可能に構成されていることが好ましい。
【0010】
本発明の脚揺動装置において、前記移動機構は、前記下腿支持手段を移動させるための機構であり、前記下腿支持手段は、前記足先支持手段に足先部分が支持される使用者のふくらはぎを前記支持面で支持可能となる第1の位置と、前記足先支持手段に足先部分が支持される使用者のふくらはぎから前記支持面を離間させる第2の位置との間で移動可能に構成されていることが好ましい。
【0011】
本発明の脚揺動装置において、前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、前記足先支持手段は、使用者のふくらはぎを前記支持面で支持可能となる位置で当該使用者の足先部分を支持する第1の支持部と、使用者のふくらはぎを前記支持面から離間させる位置で当該使用者の足先部分を支持する第2の支持部とを有することが好ましい。
【0012】
本発明の脚揺動装置において、前記第1及び第2の各支持部は、前記下腿支持手段の前記支持面と交差する方向において互いに異なる位置に配置されていることが好ましい。
本発明の脚揺動装置において、前記第1及び第2の各支持部は、前記下腿支持手段の前記支持面と交差する方向に沿って並ぶように配置されていることが好ましい。
【0013】
本発明の脚揺動装置において、前記第2の支持部は、前記第1の支持部で使用者の足先部分におけるかかと側を支持する場合に当該使用者の足先部分におけるつま先側を支持するつま先支持部位と、使用者の足先部分におけるかかと側を支持するかかと支持部位とを有することが好ましい。
【0014】
本発明の脚揺動装置において、前記かかと支持部位は、前記つま先支持部位を挟んで前記下腿支持手段の反対側に配置されていることが好ましい。
本発明の脚揺動装置において、前記下腿支持手段には、使用者の下腿部分におけるふくらはぎを支持する支持面に突設された一対の壁部が、前記支持面における前記規定の方向の両側に配置されており、前記第2の支持部は、前記両壁部のうち一方の壁部の先端に設けられる右脚用の支持部位と、他方の壁部の先端に設けられる左脚用の支持部位とを有することが好ましい。
【0015】
本発明の脚揺動装置において、前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、前記足先支持手段は、本体部と、該本体部に対して可動する可動部材とを有し、前記本体部は、使用者のふくらはぎが前記支持面によって支持されるように当該使用者の足先部分を支持可能に構成され、前記可動部材は、前記本体部を挟んで前記下腿支持手段の反対側に位置する第1の位置と、前記本体部と前記下腿支持手段とを結ぶ方向とは異なる位置に設定された第2の位置とに設置可能とされており、前記可動部材には、該可動部材が第1の位置に位置する場合において前記本体部に足先部分が支持される使用者の足裏に対向する対向部と、該可動部材が第2の位置に位置する場合において使用者のふくらはぎが前記支持面から離間するように当該使用者の足先部分が載置される載置部とが設けられていることが好ましい。
【0016】
本発明の脚揺動装置において、前記載置部は、前記可動部材において前記対向部とは異なる位置に設けられていることが好ましい。
本発明の脚揺動装置において、前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、前記足先支持手段には、使用者の足先部分の少なくとも一部を収容する収容部と、該収容部に収容される使用者の足先部分に対して前記収容部外に押し出すべく駆動する押出手段とが設けられており、前記押出手段の非駆動時には、前記収容部に足先部分の少なくとも一部が収容される使用者のふくらはぎが前記下腿支持手段の前記支持面に支持され、前記押出手段の駆動時には、使用者のふくらはぎが前記下腿支持手段の前記支持面から離間されることが好ましい。
【0017】
本発明の脚揺動装置は、前記足先支持手段を、前記規定の方向に延びる軸線を中心に回転させる回転機構をさらに備え、前記足先支持手段は、前記収容部に収容される使用者の足先部分の足裏に対向する対向部を有し、前記押出手段は、前記収容部に収容される使用者の足先部分のかかと側に対向する位置に前記対向部が前記回転機構の駆動によって配置される場合に、前記対向部を、使用者のふくらはぎを前記下腿支持手段の前記支持面から離間させる方向に移動させることが好ましい。
【0018】
本発明の脚揺動装置は、前記下腿支持手段と前記足先支持手段とを連結する連結手段と、前記下腿支持手段及び前記足先支持手段を、前記規定の方向に沿って延びる回転軸を中心に回転させる回転機構と、を備えることが好ましい。
【0019】
本発明の脚揺動装置において、前記下腿支持手段には、使用者の下腿部分を支持するための支持面と、該支持面を変位させるべく駆動する変位手段と、がさらに設けられ、前記支持面は、前記変位手段によって、使用者の下腿部分に当接可能な位置と、下腿部分に当接不能な位置との間で変位することが好ましい。
【0020】
本発明の脚揺動装置において、前記下腿支持手段には、該下腿支持手段によって支持される使用者の下腿部分を、前記規定の方向における両側から挟むように配置される一対の可動壁が設けられており、前記両可動壁は、使用者の下腿部分を支持可能な位置と、下腿部分を支持不能な位置との間で移動可能に構成されていることが好ましい。
【0021】
本発明の脚揺動装置において、前記下腿支持手段において使用者の両下腿部分の間となる位置、及び該両下腿部分の外側となる位置には、壁部がそれぞれ設けられ、前記下腿支持手段において使用者のふくらはぎに対応する部分には、開口部が形成されていることが好ましい。
【0022】
本発明の椅子型マッサージ機は、使用者が着座する座部と、前記座部に着座する使用者の脚部を支持しつつ揺動させる上記記載の脚揺動装置と、を備えることが好ましい。
【発明の効果】
【0023】
本発明によれば、使用者の脚部を揺動させることによるマッサージ感を向上させることができる。
【図面の簡単な説明】
【0024】
【図1】本発明の脚揺動装置の一実施例であるオットマンを備える椅子型マッサージ機の第1の実施形態を示す側面図。
【図2】オットマンが座部に対して回転した様子を模式的に示す側面図。
【図3】第1の実施形態におけるオットマンを模式的に示す斜視図。
【図4】(a)はフットを構成するフット本体部が第1の位置に位置する様子を模式的に示す斜視図、(b)はフット本体部が第2の位置に位置する様子を模式的に示す斜視図。
【図5】第1の実施形態における椅子型マッサージ機の電気的構成の要部を説明するブロック図。
【図6】(a)は第2の実施形態においてレッグが第1の位置に位置する様子を模式的に示す斜視図、(b)はレッグが第2の位置に位置する様子を模式的に示す斜視図。
【図7】第2の実施形態における椅子型マッサージ機の電気的構成の要部を説明するブロック図。
【図8】(a)は第3の実施形態においてフットの第1の支持部で使用者の足先部分を支持する様子を模式的に示す斜視図、(b)はフットの第2の支持部で使用者の足先部分を支持する様子を模式的に示す斜視図。
【図9】(a)は第4の実施形態におけるオットマンを模式的に示す斜視図、(b)はフットの第2の支持部を模式的に示す平面図。
【図10】(a)はフットの第1及び第2の各支持部で使用者の足先部分を支持する様子を模式的に示す正面図、(b)はその側面図。
【図11】(a)はフットの第2の支持部で使用者の足先部分を支持する様子を模式的に示す正面図、(b)はその側面図。
【図12】(a)(b)は第5の実施形態におけるオットマンを模式的に示す斜視図。
【図13】(a)(b)は第6の実施形態におけるオットマンを模式的に示す斜視図。
【図14】(a)(b)は第7の実施形態におけるオットマンのフットを構成するフット本体部を模式的に示す正面図。
【図15】第7の実施形態におけるオットマンのフットを模式的に示す斜視図。
【図16】(a)(b)(c)は第8の実施形態におけるオットマンを模式的に示す側面図。
【図17】(a)(b)は第9の実施形態におけるオットマンのフットを模式的に示す斜視図。
【図18】(a)(b)(c)は第10の実施形態におけるオットマンのレッグを模式的に示す正面図。
【図19】(a)(b)は第11の実施形態におけるオットマンのフットを模式的に示す斜視図。
【図20】第12の実施形態におけるオットマンのフットを模式的に示す斜視図。
【発明を実施するための形態】
【0025】
(第1の実施形態)
以下、本発明の椅子型マッサージ機を具体化した第1の実施形態を、図1〜図5に従って説明する。なお、以下における本明細書中の説明において、「前後方向」とは椅子型マッサージ機に着座した使用者を基準とした方向に該当する方向である。また、「幅方向」とは使用者の左右方向に該当する方向であり、「上下方向」とは椅子型マッサージ機が設置される設置面と直交する方向に該当する方向であるものとする。
【0026】
図1に示すように、本実施形態の椅子型マッサージ機1は、使用者の臀部を支持するための座部10を備えている。この座部10の後側(図1では左側)には、使用者の背中を支持するための背もたれ部20が、座部10に対して回動可能に設けられている。また、座部10の幅方向(図1では紙面と直交する方向)における両側には、使用者の腕を保持するための肘掛30が設けられている。さらに、座部10の前側(図1では右側)には、使用者の脚部を支持するためのオットマン(脚揺動装置)40が、座部10に対して回動可能に設けられている。
【0027】
次に、座部10について説明する。
座部10は、幅方向における両側に配置される一対の支持脚11によって設置面2上に設置されている。こうした座部10内には、座部10の骨格を構成する座フレーム12が前後方向に延びるように設けられている。座フレーム12の後端及び前端には、幅方向に延びる回転軸13,14がそれぞれ設けられている。また、座部10内には、座部10に対する背もたれ部20の回転角度TBを調整する第1角度調整機構15と、座部10に対するオットマン40の回転角度TAを調整する第2角度調整機構16とが設けられている。
【0028】
次に、背もたれ部20について説明する。
背もたれ部20内には、座部10内まで延びる背フレーム21が設けられている。この背フレーム21において座部10内に位置する部分は、座フレーム12の後端に設けられた回転軸13に回転自在に連結されている。また、背フレーム21において座部10内に位置する部分には、第1角度調整機構15が動力伝達可能に連結されている。そして、第1角度調整機構15で発生した駆動力が背フレーム21に伝達されることにより、座部10に対する背もたれ部20の回転角度TBが調整される。
【0029】
また、背もたれ部20の幅方向の中央部には、使用者の腰、背中、肩及び首を施術する揉み玉機構22が設けられている。この揉み玉機構22には、身体に接触する揉み玉23と、揉み玉23を駆動させるアクチュエータ24とが設けられている。
【0030】
次に、オットマン40について説明する。
オットマン40は、座部10に着座した使用者の脚部のうち下腿部分を支持するための下腿支持手段としてのレッグ41と、足先部分を支持するための足先支持手段としてのフット42とを備えている。本実施形態において、「下腿部分」とは使用者の脚部において膝から足首までの部分を示し、「足先部分」とは脚部において足首から先の部分を示している。
【0031】
こうしたオットマン40には、レッグ41及びフット42を連結する脚フレーム(連結手段)43が設けられている。この脚フレーム43の一端は、座部10内まで延びており、座フレーム12の前端に設けられた回転軸14に回転自在に連結されている。また、脚フレーム43には、第2角度調整機構16が動力伝達可能に連結されている。そして、図1及び図2に示すように、第2角度調整機構16で発生した駆動力が脚フレーム43に伝達されることにより、座部10に対するオットマン40の回転角度TAが調整される。
【0032】
また、本実施形態のオットマン40には、レッグ41の背面側(図1では左側であって、図2では下側)に配置される揺動装置(揺動手段)44が設けられている。この揺動装置44は、モータなどの図示しないアクチュエータと、該アクチュエータで発生した動力をオットマン40に伝達する図示しない伝達機構とを有している。こうした揺動装置44の駆動によって、オットマン40は、座部10に対して幅方向に揺動するようになっている。つまり、レッグ41及びフット42は、脚フレーム43に対して幅方向に往復移動可能に連結されている。
【0033】
ただし、揺動装置(揺動手段)44によるオットマン40の揺動方向については、幅方向以外の他の方向であってもよい。例えば、オットマン40の揺動方向は、上下方向であってもよいし、第1の方向に延びる軸線を中心とした回転方向であってもよい。また、揺動のパターンについても、複数の方向(幅方向、上下方向及び回転方向)を任意に組み合わせたパターンであってもよい。なお、揺動のパターンについては、予め複数種類用意しておき、操作部82の操作によって使用者に選択させてもよい。
【0034】
次に、レッグ41及びフット42の構成について説明する。なお、本実施形態でいう「ふくらはぎ」とは、下腿部分における背面側の部位のことを示している。
図3に示すように、レッグ41は、使用者のふくらはぎを支持する支持面50を有するレッグ本体51を備えている。このレッグ本体51の幅方向における中央及び両端の各位置には、支持面50から前側に突出する壁部52A,52B,52Cがそれぞれ設けられている。そして、幅方向における一方側(図3では左側)に位置する壁部52Aと中央に位置する壁部52Bによって、使用者の右脚の下腿部分を収容する右下腿収容部53が形成されている。また、幅方向における他方側(図3では右側)に位置する壁部52Cと中央に位置する壁部52Bによって、使用者の左脚の下腿部分を収容する左下腿収容部54が形成されている。
【0035】
また、レッグ本体51、壁部52A及び壁部52Bにおいて右下腿収容部53に対向する各部分には、右下腿収容部53内に収容された使用者の右下腿部分を押圧施術するためのエアバッグ(押圧施術手段)55がそれぞれ設けられている。同様に、レッグ本体51、壁部52B及び壁部52Cにおいて左下腿収容部54に対向する各部分には、左下腿収容部54内に収容された使用者の左下腿部分を押圧施術するためのエアバッグ(押圧施術手段)56がそれぞれ設けられている。
【0036】
フット42は、使用者の右の足先部分が収容される右足先収容部60及び左の足先部分が収容される左足先収容部61を有するフット本体部62と、フット本体部62を挟んでレッグ41の反対側に位置する足裏支持部63とを備えている。足裏支持部63には、使用者の足裏に対向する対向面64が形成されている。
【0037】
フット本体部62は、足先部分のうちかかと側に対向する対向部65を有している。この対向部65の幅方向における中央及び両端の各位置には、前側に突出する壁部66A,66B,66Cがそれぞれ設けられている。そして、対向部65、壁部66A及び壁部66Bによって右足先収容部60が形成されると共に、対向部65、壁部66B及び壁部66Cによって左足先収容部61が形成される。また、壁部66A及び壁部66Bにおいて右足先収容部60に対向する各部分には、右足先収容部60内に収容された使用者の右の足先部分を押圧施術するためのエアバッグ67がそれぞれ設けられている。同様に、壁部66B及び壁部66Cにおいて左足先収容部61に対向する各部分には、左足先収容部61内に収容された使用者の左の足先部分を押圧施術するためのエアバッグ68がそれぞれ設けられている。
【0038】
本実施形態のフット42には、図4(a)(b)に示すように、レッグ41に対してフット本体部62を相対移動させるための移動機構70が設けられている。この移動機構70は、モータなどの図示しないアクチュエータと、該アクチュエータで発生した動力をフット本体部62に伝達するための図示しない伝達機構とを有している。こうした移動機構70の駆動によって、フット本体部62は、レッグ41、フット本体部62及び足裏支持部63の並ぶ第1の方向(図4では左右方向)と直交(交差)する第2の方向(図4では上下方向)にスライド移動可能となっている。この第2の方向は、上記レッグ本体51の支持面50と直交(交差)する方向である。
【0039】
そして、フット本体部62が図4(a)に示す第1の位置に位置する場合、足先部分がフット本体部62で支持される使用者の下腿部分は、レッグ41によって支持されている。すなわち、使用者の両ふくらはぎは、レッグ41の支持面50によって支持されている。その一方で、フット本体部62が図4(b)に示す第2の位置に位置する場合、足先部分がフット本体部62で支持される使用者の下腿部分は、レッグ41によって支持されない。すなわち、使用者の両ふくらはぎは、レッグ41の支持面50から離間している。
【0040】
次に、本実施形態の椅子型マッサージ機1の電気的構成について説明する。なお、図5には、使用者の脚部に対する施術(押圧施術、揺動施術)に必要な部分が中心に図示されている。
【0041】
図5に示すように、椅子型マッサージ機1には、オットマン40を揺動させるための揺動装置44と、オットマン40に設けられる各エアバッグ55,56,67,68内の空気圧を個別に調整するための空気圧送装置80と、上記回転角度TAを調整する第2角度調整機構16と、揺動装置44、空気圧送装置80及び第2角度調整機構16を制御する制御装置81とが設けられている。
【0042】
空気圧送装置80は、空気をエアバッグ55,56,67,68内に圧送すべく駆動する圧送ポンプ(図示略)と、エアバッグ55,56,67,68毎に設けられる複数の電磁弁(図示略)とを備えている。これら各電磁弁は、例えば、エアバッグ55,56,67,68内の空気圧を保持する際には閉弁状態にされ、空気圧を変動させる際(例えば、増圧又は減圧させる際)には開弁状態にされる。
【0043】
制御装置81は、図示しないCPU、ROM及びRAMなどで構成されるデジタルコンピュータを備えている。そして、制御装置81は、使用者による操作部82の操作に基づき、揺動装置44、空気圧送装置80及び第2角度調整機構16に加え、フット本体部62を移動させるための移動機構70を適宜制御する。
【0044】
例えば、使用者の脚部に押圧施術を施す場合、制御装置81は、揺動装置44の駆動を禁止すると共に、空気圧送装置80を駆動させる。つまり、制御装置81は、オットマン40に設けられる各エアバッグ55,56,67,68内の空気圧を調整することにより、脚部に対して押圧施術を行う。このとき、フット本体部62は、第1の位置に位置している。
【0045】
また、使用者の脚部に揺動施術を施す場合、制御装置81は、移動機構70を駆動させてフット本体部62を第1の位置から第2の位置に移動させ、その後、揺動装置44を駆動させる。
【0046】
次に、本実施形態の椅子型マッサージ機1を使用する使用者の脚部に対して揺動施術を施す際の作用について説明する。
さて、揺動施術を施す場合、第2角度調整機構16の駆動によって、オットマン40は、座部10に着座する使用者のふくらはぎが設置面2に対向した状態になるまで回転する(図2参照)。すると、フット42に設けられた移動機構70の駆動によって、フット本体部62が、第1の位置から第2の位置まで移動する(図4参照)。
【0047】
その結果、足先部分がフット本体部62に支持される使用者の下腿部分の大部分又は全体は、レッグ41の外側(図4(b)ではレッグ41の上側)に位置するようになる。つまり、足先部分がフット本体部62に支持される使用者のふくらはぎは、レッグ41の支持面50から離間される。また、使用者の下腿部分における幅方向(規定の方向)の両側が、レッグ41の壁部52A,52B,52Cに接触しなくなる。
【0048】
この状態で揺動装置44が駆動すると、使用者の足先部分を支持するフット本体部62が揺動する。その結果、使用者の脚部には、足先部分がフット本体部62に支持された状態で揺動施術が施される。この場合、使用者の下腿部分とレッグ41との接触が抑制される。そのため、フット本体部62を第1の位置に配置した状態で揺動施術を施す場合と比較して、使用者の下腿部分とレッグ41との接触による不快感が抑制されると共に、使用者のふくらはぎの揺れが阻害されなくなる。その結果、オットマン40の揺動によるマッサージ感が向上する。
【0049】
なお、揺動施術を施す場合、フット本体部62の各壁部66A,66B,66Cに設けられるエアバッグ67を膨張させてもよい。この場合、フット本体部62の各収容部60,61に収容される使用者の足先部分が幅方向における両側に配置されるエアバッグ67によって挟持され、この状態で、使用者の脚部に対して揺動施術が施される。
【0050】
以上説明したように、本実施形態では、以下に示す効果を得ることができる。
(1)揺動装置44の駆動時には、足先部分がフット42に支持される使用者の下腿部分の大部分又は全部が、レッグ41外に位置している。そのため、揺動装置44の駆動によって使用者の脚部に揺動施術を施す場合には、下腿部分がレッグ41に接触する可能性が低くなる。したがって、使用者の脚部を揺動させることによるマッサージ感を向上させることができる。
【0051】
(2)本実施形態では、使用者の両下腿部分において揺動方向の外側に位置する部分とレッグ41との接触が抑制される。そのため、フット本体部62が第1の位置に位置する状態で揺動施術を行う場合と比較して、揺動施術時における脚部の振れ幅を広くすることができる。その結果、揺動施術によるマッサージ感を向上させることができる。
【0052】
(3)さらに、本実施形態では、フット本体部62とレッグ41との相対的な位置関係を変更させている。すなわち、フット本体部62とレッグ41とが第1の位置関係にある場合には、レッグ41によって使用者の下腿部分を支持することができる。そのため、レッグ41に設けられたエアバッグ55,56を用いることにより、下腿部分に対して押圧施術を施すことができる。一方、フット本体部62とレッグ41とが第2の位置関係にある場合には、使用者の下腿部分は、レッグ41外に位置している。つまり、使用者のふくらはぎは、レッグ41の支持面50から離間している。こうした第1の位置関係から第2の位置関係への変化を、使用者の脚部をオットマン40で支持したままの状態で行うことができる。したがって、位置関係を変化させる場合に脚部をオットマン40から離間させるという使用者の手間を省くことができる。
【0053】
(4)より具体的には、移動機構70の駆動によって、フット本体部62を第1の位置と第2の位置との間で移動させるという簡単な構成で、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0054】
(第2の実施形態)
次に、本発明の第2の実施形態を図6及び図7に従って説明する。なお、第2の実施形態は、フットとレッグとの位置関係の変更方法が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1の実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0055】
図6(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40は、レッグ(下腿支持手段)41及びフット(足先支持手段)42を備えている。これらレッグ41及びフット42には、座部10の座フレーム12における前端に設けられた回転軸14に回転可能に接続される接続フレーム43A,43Bが個別に設けられている。そして、上記第2角度調整機構16が駆動した場合、レッグ41及びフット42は、座部10に対して共に回動するようになっている。
【0056】
本実施形態のオットマン40には、レッグ41を、フット42に対して移動させるための移動機構70Aが設けられている。つまり、本実施形態では、上記第1の実施形態の場合とは逆に、レッグ41をフット42に対して移動させることにより、レッグ41とフット42との位置関係を異ならせている。
【0057】
具体的には、レッグ41が図6(a)に示す第1の位置に位置する場合、レッグ41、フット本体部62及び足裏支持部63が第1の方向に沿って並置されている。すなわち、レッグ41、フット本体部62及び足裏支持部63は、第2の方向において同一位置に位置している。そのため、足先部分がフット42に支持される使用者の両下腿部分は、レッグ41に設けられる両下腿収容部53,54内に収容される。一方、レッグ41が図6(b)に示す第2の位置に位置する場合、レッグ41は、第2の方向においてフット本体部62及び足裏支持部63とは異なる位置に位置するようになっている。具体的には、レッグ41は、図6においてフット本体部62及び足裏支持部63の下側に位置している。その結果、足先部分がフット42に支持される使用者の両下腿部分は、レッグ41外に位置するようになる。
【0058】
このようにレッグ41は、移動機構70Aによって、支持面50で使用者のふくらはぎを支持可能な第1の位置と、使用者のふくらはぎから支持面50を離間させる第2の位置との間で移動する。そして、レッグ41を第2の位置に配置した状態で揺動装置(揺動手段)44が駆動することにより、揺動施術時に使用者の下腿部分とレッグ41との接触が抑制される。なお、本実施形態では、揺動装置44は、レッグ41及びフット42のうち少なくともフット42を揺動させることができるように構成されている。
【0059】
以上説明したように、本実施形態では、第1の実施形態における効果(1)〜(3)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(5)本実施形態では、移動機構70Aの駆動によって、レッグ41を第1の位置と第2の位置との間で移動させるという簡単な構成で、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0060】
(第3の実施形態)
次に、本発明の第3の実施形態を図8に従って説明する。なお、第2の実施形態は、レッグ及びフットの位置関係を変更させない点で第1及び第2の各実施形態と異なっている。したがって、以下の説明においては、第1及び第2の各実施形態と相違する部分について主に説明するものとし、第1及び第2の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0061】
図8(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Aでは、揺動装置(揺動手段)44Aからの駆動力を伝達するための伝達軸140がレッグ(下腿支持手段)41に接続されている。そして、この伝達軸140が回転方向における一方側及び他方側に回転することにより、レッグ41及びフット(足先支持手段)42Aが矢印方向に揺動するようになっている。
【0062】
また、本実施形態のフット42Aには、レッグ41の支持面50に直交(交差)する第2の方向において互いに異なる位置に配置される第1の支持部141と第2の支持部142とが設けられている。第1の支持部141は、使用者の足裏を支持する足裏支持面143を有している。そして、第1の支持部141によって足先部分が支持される場合、該足先部分を有する使用者の両下腿部分は、レッグ41によって支持されている(図8(a)参照)。
【0063】
第2の支持部142は、図8において第1の支持部141よりも上側に位置している。こうした第2の支持部142には、使用者の足先部分におけるかかと側を支持する一対のかかと支持用凹部144が設けられている。これら両かかと支持用凹部144は、幅方向において互いに異なる位置に配置されている。そして、第2の支持部142によって足先部分が支持される場合、該足先部分を有する使用者の両下腿部分は、レッグ41によって支持されない(図8(b)参照)。すなわち、使用者のふくらはぎは、レッグ41の支持面50から離間している。
【0064】
このように第2の支持部142に足先部分が支持された状態で揺動装置44Aを駆動させることにより、揺動施術時に使用者の両下腿部分とレッグ41との接触が抑制される。
以上説明したように、本実施形態では、第1及び第2の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
【0065】
(6)本実施形態のフット42Aには、押圧施術時用の第1の支持部141と、揺動施術時用の第2の支持部142とが予め用意されている。そのため、フット42Aとレッグ41との位置関係を変更させるための移動機構などを設ける必要がない。つまり、オットマン40Aにおける可動機構を簡略化させることができる。
【0066】
(第4の実施形態)
次に、本発明の第4の実施形態を図9〜図11に従って説明する。なお、第4の実施形態は、フットの構成が第3の実施形態と異なっている。したがって、以下の説明においては、第3の実施形態と相違する部分について主に説明するものとし、第1〜第3の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0067】
図9(a)に示すように、本実施形態のオットマン(脚揺動装置)40Aに設けられるフット(足先支持手段)42Bは、第2の方向に沿って並置される第1の支持部241と第2の支持部242とを備えている。第1の支持部241は、第2の方向においてレッグ(足先支持手段)41と同一位置に配置されている。こうした第1の支持部241は、図10(a)(b)に示すように、レッグ41に対して、幅方向に延びる軸部243を介して回転可能に連結されている。
【0068】
また、第1の支持部241は、使用者の足先部分におけるかかと側を支持する支持部材245を有している。この支持部材245の幅方向における両端部及び中央には、壁部246がそれぞれ設けられている。なお、図10(a)では、中央に位置する壁部の図示が省略されている。そして、幅方向において互いに隣り合う壁部246同士の間に形成された収容部に、使用者の足先部分におけるかかと側が収容される。また、各壁部246には、上記収容部に収容された足先部分を幅方向における両側から挟持するためのエアバッグ247がそれぞれ設けられている。これらエアバッグ247は、使用者の足先部分の押圧施術時においては幅方向に伸縮動作するようになっている。
【0069】
図9(a)(b)に示すように、第2の支持部242は、幅方向において第1の支持部241を構成する各壁部246に対応する各位置に配置される3つの壁部250を有している。幅方向において互いに隣り合う壁部250同士は、連結部251によって連結されている。この連結部251は、第1の方向においてレッグ41から離間した側であって、且つ第2の方向において第1の支持部241に近い側の位置に配置されている。
【0070】
そして、第2の支持部242において第1の方向におけるレッグ41に近い側(図9(b)では下側)は、第1の支持部241にかかと側が支持される足先部分におけるつま先側を支持するつま先支持部位252となっている。つまり、第1の支持部241で足先部分を支持する場合、足先部分におけるかかと側は第1の支持部241で支持されると共に、つま先側は第2の支持部242で支持される。
【0071】
また、第2の支持部242において第1の方向におけるレッグ41から離間した側(図9(b)では上側)は、足先部分におけるかかと側を支持するかかと支持部位253となっている。そして、かかと支持部位253で足先部分を支持する場合、図11(a)(b)に示すように、足先部分におけるかかと側が第2の支持部242の連結部251に載置されるようになっている。このように第2の支持部242で使用者の足先部分を支持する場合、該使用者のふくらはぎは、レッグ41の支持面50から離間した状態になる。
【0072】
なお、本実施形態において、第2の支持部242のつま先支持部位252には、足先部分のうちつま先支持部位252で支持する部位を幅方向における両側から挟持するためのエアバッグ254が設けられている(図10(a)参照)。同様に、第2の支持部242のかかと支持部位253には、足先部分のうちかかと支持部位253で支持する部位を幅方向における両側から挟持するためのエアバッグ255が設けられている(図11(a)参照)。こうした各エアバッグ254,255は、第2の支持部242を構成する各壁部250に設けられている。
【0073】
そして、第2の支持部242のかかと支持部位253で使用者の足先部分を支持させる状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0074】
以上説明したように、本実施形態では、第1〜第3の各実施形態における効果(1)(2)(6)と同等の効果を得ることができる。
なお、オットマン40の全体(レッグ41及びフット42B)を揺動させるのではなく、揺動装置44の駆動によって上記第2の支持部242のみを揺動させるようにしてもよい。この場合、揺らす対象が小型且つ軽量になる分、揺動装置44を小型化させることができる。このように揺動装置44が小型化されると、該揺動装置44を第1の支持部241内又は図10(a)において第1の支持部241の下側に配置することが可能となる。
【0075】
(第5の実施形態)
次に、本発明の第5の実施形態を図12に従って説明する。なお、第5の実施形態は、フットを複数設ける点が第3及び第4の各実施形態と異なっている。したがって、以下の説明においては、第3及び第4の各実施形態と相違する部分について主に説明するものとし、第1〜第4の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0076】
図12(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Aは、第1のフット(第1の支持部)340と第2のフット(第2の支持部)350とを備えている。つまり、本実施形態では、第1及び第2の各フット340,350により、足先支持手段が構成される。第1のフット340は、レッグ(下腿支持手段)41を挟んで座部10の反対側(図12では左側)に配置されている。そして、第1のフット340で足先部分を支持する場合、使用者の下腿部分は、レッグ41によって支持される。
【0077】
第2のフット350は、レッグ41を構成する壁部52A,52Cの先端(図12では上端)に配置されている。具体的には、第2のフット350において壁部(一方の壁部)52Aの先端に配置される部位は、使用者の右の足先部分を支持する右脚用の支持部位351となっている。また、第2のフット350において壁部(他方の壁部)52Cの先端に配置される部位は、使用者の左の足先部分を支持する左脚用の支持部位352となっている。そして、第2のフット350で足先部分を支持する場合、使用者の下腿部分は、レッグ41によって支持されない。そして、この状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0078】
以上説明したように、本実施形態では、第1〜第4の各実施形態における効果(1)(2)(6)と同等の効果を得ることができる。
(第6の実施形態)
次に、本発明の第6の実施形態を図13に従って説明する。なお、第6の実施形態は、フットの構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第5の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0079】
図13(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Bに設けられるフット(足先支持手段)42Cは、フット本体部(本体部)440及び足裏支持部(可動部材)441に加え、足裏支持部441をフット本体部440に対して移動させるための移動機構442をさらに備えている。本実施形態において、足裏支持部441は、図13(a)に示す第1の位置と、図13(b)に示す第2の位置とに設置可能となっている。第1の位置は、フット本体部440を挟んだレッグ41の反対側のことである。また、第2の位置は、フット本体部440の第2の方向における一方側(図13では上側)のことである。
【0080】
足裏支持部441において使用者の足裏に対向する対向面(対向部)443は、足裏支持部441が第1の位置に位置する場合には使用者の足裏に対向している。そして、フット本体部440に足先部分が支持される使用者の下腿部分は、レッグ41によって支持される。
【0081】
一方、足裏支持部441が第2の位置に位置する場合、対向面443は、フット本体部440に対向している。そして、足裏支持部441において対向面443の反対側に位置する載置部の一例としての載置面(図13では上面)444に、使用者の足先部分が載置される。この場合、足裏支持部441の載置面444で足先部分を支持させることにより、使用者の下腿部分は、レッグ41によって支持されない。そして、この状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0082】
以上説明したように、本実施形態では、第1〜第5の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(7)本実施形態では、移動機構442の駆動によって、足裏支持部441が第1の位置から第2の位置に移動させる。そして、第2の位置に設置される足裏支持部441の載置面444に足先部分を載置(支持)させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0083】
なお、移動機構442の駆動によって、フット本体部440及び足裏支持部441を含むフット42C全体を、幅方向に延びる軸線を中心に回転させるようにしてもよい。このように構成しても、上記(7)と同等の効果を得ることができる。
【0084】
(第7の実施形態)
次に、本発明の第7の実施形態を図14及び図15に従って説明する。なお、第7の実施形態は、フットの構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第6の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0085】
図14及び図15に示すように、本実施形態のオットマン(脚揺動装置)40Cに設けられたフット(足先支持手段)42Dには、フット本体部540と、足裏支持部541とが設けられている。フット本体部540には、図14(a)(b)に示すように、該フット本体部540で支持する使用者の足先部分の第2の方向における位置を変更すべく作動するエアバッグ(押出手段)542が設けられている。より具体的には、エアバッグ542は、フット本体部540において足先部分のうちかかと側に対向する対向部543に、第2の方向に沿って伸縮するように配置されている。
【0086】
そして、エアバッグ542が収縮している場合、使用者の足先部分の大部分は、フット本体部540の収容部545内に収容されている(図14(a)参照)。この場合、使用者の下腿部分は、レッグ(下腿支持手段)41に支持されている。
【0087】
一方、エアバッグ542が膨張した場合、使用者の足先部分の大部分は、フット本体部540の収容部545から外部(より詳しくは、図14における上側)に押し出される(図14(b)及び図15参照)。この場合、使用者の下腿部分は、レッグ41によって支持されない。すなわち、エアバッグ542が膨張すると、使用者のふくらはぎは、第2の方向においてレッグ41の支持面50から離間するようになっている。そして、この状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0088】
以上説明したように、本実施形態では、第1〜第6の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(8)本実施形態では、フット42Cに設けられたエアバッグ542の伸縮度合を調整させることにより、レッグ41と使用者の下腿部分との位置関係を変更させることができる。すなわち、エアバッグ542を膨張させることにより、使用者の足先部分を第2の方向に移動させ、結果として、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0089】
(第8の実施形態)
次に、本発明の第8の実施形態を図16に従って説明する。なお、第8の実施形態は、フットの構成が第7の実施形態と異なっている。したがって、以下の説明においては、第7の実施形態と相違する部分について主に説明するものとし、第1〜第6の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0090】
図16(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Dに設けられたフット(足先支持手段)42Eは、使用者の足先部分の大部分が収容される収容部640を有するフット本体部641と、収容部640内において使用者の足先部分の足裏に対向する対向部の一例としての対向部材642とを有している。こうしたフット42Eには、幅方向に延びる回転軸643を中心に、レッグ(下腿支持手段)41に対して回転させるための駆動機構(回転機構)644が設けられている。具体的には、フット42Eは、対向部材642が足裏に対向する第1の回転位置(図16(a)参照)と、対向部材642が足先部分のかかと側に対向する第2の回転位置(図16(b)参照)との間で回転するようになっている。
【0091】
また、本実施形態のフット42Eには、図16(c)に示すように、フット42Eが第2の回転位置に位置する場合に、対向部材642を第2の方向に進退移動させるべく駆動する昇降機構(押出手段)645が設けられている。対向部材642が図16(b)に示す非揺動時位置に位置する場合、使用者のふくらはぎは、レッグ41の支持面50で支持される。一方、対向部材642が図16(c)に示す揺動時位置に位置する場合、使用者のふくらはぎは、レッグ41の支持面50から離間する。
【0092】
つまり、昇降機構645の駆動によって対向部材642が非揺動時位置から揺動時位置にスライド移動すると、フット42Eで足先部分が支持される使用者のふくらはぎは、レッグ41の支持面50から離間していく。そして、この状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0093】
以上説明したように、本実施形態では、第1〜第6の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(9)本実施形態では、対向部材642を変位させることにより、レッグ41と使用者の下腿部分との位置関係を変更させることができる。その結果、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0094】
(第9の実施形態)
次に、本発明の第9の実施形態を図17に従って説明する。なお、第9の実施形態は、フット及びレッグを共に回転させるための構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第8の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0095】
図17(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Eに設けられたレッグ(下腿支持手段)41及びフット(足先支持手段)42は、連結手段としての連結部材700によって連結されている。また、レッグ41は、座部10から延設された延設部材701の先端に対して回動可能に連結されている。本実施形態のオットマン40Eは、回転機構を構成する回転モータ702からの駆動力によって、幅方向に延びる回転軸(軸線)703を中心に回転するようになっている。
【0096】
そして、図17(a)に示すように、前後方向と第1の方向とが一致する場合、フット42で使用者の足先部分が支持されると、該使用者の下腿部分がレッグ41によって支持される。一方、図17(a)の状態からフット42が上方に変位するようにオットマン40Eを回動させた場合、図17(b)に示すように、足先部分がフット42に支持される使用者の下腿部分は、レッグ41によって支持されなくなる。この状態で揺動装置(揺動手段)44を駆動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触が抑制される。
【0097】
以上説明したように、本実施形態では、第1〜第7の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(10)本実施形態では、延設部材701の先端を中心にオットマン40Eを回動させることにより、揺動施術時における使用者の下腿部分とレッグ41との接触を抑制することができる。
【0098】
(第10の実施形態)
次に、本発明の第10の実施形態を図18に従って説明する。なお、第10の実施形態は、レッグの構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第9の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0099】
図18(a)(b)に示すように、本実施形態のオットマン(脚揺動装置)40Fに設けられたレッグ(下腿支持手段)41Aには、使用者の下腿部分を幅方向における両側から挟持するためのエアバッグ(変位手段)800と、使用者のふくらはぎを押圧するためのエアバッグ(変位手段)801とが設けられている。そして、フット42に足先部分が支持された状態で各エアバッグ800,801が膨張した場合、図18(a)に示すように、レッグ41Aの支持面(本実施形態では、各エアバッグ800,801の先端の面)802に、使用者の下腿部分が接触する。この状態で各エアバッグ800,801内の空気圧を調整することにより、レッグ41Aで支持される使用者の下腿部分に対して押圧施術が施される。つまり、本実施形態においては、押圧施術手段として機能するエアバッグ800,801が、変位手段としても機能する。
【0100】
一方、各エアバッグ800,801が収縮した場合、図18(b)に示すように、レッグ41Aの支持面802は、使用者の下腿部分から離間される。つまり、使用者の下腿部分は、レッグ41Aによって支持されていない。そして、この状態で揺動装置(揺動手段)44が駆動する場合、揺動施術される使用者の下腿部分とレッグ41Aとの接触が抑制される。
【0101】
なお、レッグ41Aに設けられる各エアバッグ800,801は個別に伸縮制御される。そのため、揺動施術時には、図18(c)に示すように、使用者の下腿部分を幅方向における両側から挟持するためのエアバッグ800を収縮させ、使用者のふくらはぎを押圧するためのエアバッグ801の膨張状態を維持させてもよい。この場合であっても、ふくらはぎがレッグ41Aに接触する場合と比較して、揺動施術時におけるマッサージ感を向上させることができる。
【0102】
以上説明したように、本実施形態では、第1〜第8の各実施形態における効果(1)(2)と同等の効果に加え、以下に示す効果をさらに得ることができる。
(11)本実施形態では、下腿部分の押圧施術に用いるエアバッグ800,801の伸縮態様を調整することにより、揺動施術時における使用者の下腿部分とレッグ41Aとの接触を抑制することができる。
【0103】
(12)また、レッグ41Aやフット42を移動させるための機構を備えなくてもよく、さらには押圧施術手段でもあるエアバッグ800,801が変位手段を兼ねている。そのため、オットマン40Fの構成を簡略化させることができる。
【0104】
(第11の実施形態)
次に、本発明の第11の実施形態を図19に従って説明する。なお、第11の実施形態は、レッグの構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第10の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0105】
図19(a)(b)に示すように、本実施形態におけるオットマン(脚揺動装置)40Gに設けられたレッグ(下腿支持手段)41Bは、幅方向における中央に配置される壁部900を備えている。また、この壁部900の幅方向における両側には、脚フレーム(連結手段)43に対して回動可能に連結される可動壁901がそれぞれ設けられている。これら各可動壁901は、レッグ41Bに収容される使用者の下腿部分を支持可能な第1の位置(図19(a)に示す位置)と、下腿部分から離間する第2の位置(図19(b)に示す位置)との間で移動可能となっている。なお、各可動壁901は、図示しない移動機構の駆動によって回動するように構成されている。
【0106】
そして、各可動壁901が第2の位置に配置された状態で揺動装置(揺動手段)44が駆動すると、使用者の下腿部分において外側に位置する部分が、レッグ41Bに接触しない。その結果、使用者の下腿部分において外側に位置する部分がレッグ41Bに接触する場合と比較して、揺動施術によるマッサージ感を向上させることができる。
【0107】
以上説明したように、本実施形態では、第1〜第8の各実施形態における効果(1)(2)と同等の効果を得ることができる。
(第12の実施形態)
次に、本発明の第12の実施形態を図20に従って説明する。なお、第12の実施形態は、レッグの構成が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1〜第11の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0108】
図20に示すように、本実施形態のオットマン(脚揺動装置)40Hに設けられたレッグ(下腿支持手段)41Cは、幅方向に沿って配置される3つの壁部950A,950B,950Cを備えている。これら各壁部950A,950B,950Cは、フット(足先支持手段)42に移動不能に固定されている。こうしたレッグ41Cには、足先部分がフット42に支持される使用者のふくらはぎに対応する位置に開口部951が設けられている。すなわち、本実施形態のレッグ41Cには、使用者のふくらはぎを支持するための支持面が設けられていない。
【0109】
そのため、レッグ41Cに下腿部分が支持された状態で揺動装置(揺動手段)44が駆動しても、使用者のふくらはぎとレッグ41Cとの接触は回避される。したがって、ふくらはぎがレッグ41Cに接触する場合と比較して、揺動施術によるマッサージ感を向上させることができる。
【0110】
以上説明したように、本実施形態では、以下に示す効果を得ることができる。
(13)本実施形態では、ふくらはぎに対応する位置に開口部951が設けられている。そのため、揺動装置44の駆動によって使用者の脚部に揺動施術を施す場合には、使用者のふくらはぎがレッグ41Cに接触しない。したがって、使用者の脚部を揺動させることによるマッサージ感を向上させることができる。
【0111】
(14)しかも、揺動施術を行う前準備として、フット42やレッグ41Cを移動させたり、足先部分を支持させる位置を変更したりするという使用者の手間を省くことができる。
【0112】
なお、上記各実施形態は以下のような別の実施形態に変更してもよい。
・第12の実施形態において、レッグ41Cには、使用者のふくらはぎを支持する支持面を有する支持部材を設けてもよい。こうした構成の場合、オットマン40Hには、当該支持部材を、使用者のふくらはぎから離間させるための機構をさらに設けることが好ましい。
【0113】
・第12の実施形態において、レッグ41Cの幅方向における両端に設けられる壁部52A,52Cは、使用者の下腿部分に当接可能な第1の位置と当接不能な第2の位置との間で移動可能な可動壁であってもよい。
【0114】
・第11の実施形態において、一対の可動壁901の間に配置される壁部900を、第2の方向に移動可能な可動壁としてもよい。この場合、揺動施術時には、壁部900を、使用者の下腿部分に当接不能な位置に退避移動させることができる。
【0115】
・第10の実施形態において、レッグ(下腿支持手段)41Aには、使用者のふくらはぎを押圧するためのエアバッグ801を設けなくてもよい。この場合、レッグ41Aを、使用者のふくらはぎに対向する面(即ち、支持面)がふくらはぎに当接するように構成することが好ましい。
【0116】
・第10の実施形態において、レッグ41Aにおいて幅方向における中央に位置する壁部52Bに設けられたエアバッグ800を、揺動施術時には収縮させなくてもよい。
・第9の実施形態において、フット42に、座部10から延設された連結部材700の先端を回動可能に連結させてもよい。
【0117】
・第7の実施形態において、フット本体部540に設けられたエアバッグ542の膨張量を、膨張によって使用者のふくらはぎをレッグ41の支持面50から離間させることができるのであれば任意の量に設定してもよい。すなわち、エアバッグ542の膨張によって、使用者の足先部分を、フット42D外に押し出さなくてもよい。
【0118】
・第7の実施形態において、押圧手段は、フット本体部540の対向部543を、第2の方向に沿って進退移動させることが可能な構成であればエアバッグ以外の他の任意の機構を備えたものであってもよい。例えば、押出手段は、対向部543を進退移動させるべく駆動するモータなどのアクチュエータを備えた構成であってもよい。
【0119】
・第6の実施形態において、フット42Cの足裏支持部441を、該足裏支持部441が第2の位置に位置する場合に対向面443が載置部として機能するように移動させてもよい。
【0120】
・第6の実施形態において、足裏支持部441を、フット本体部440から取り外し可能に構成してもよい。この場合、足裏支持部441を、フット本体部440に対して第1及び第2の各位置に取り付け可能に構成することが好ましい。
【0121】
・第1の実施形態において、オットマン40を、フット42全体が第2の方向(図2における上下方向)に沿って移動可能となるように構成してもよい。
・第1〜第4及び第6〜第12の各実施形態において、揺動装置44,44Aは、フット42,42A,42B,42C,42D,42Eを揺動させることが可能であれば、レッグ41を揺動させなくてもよい。
【0122】
第5の実施形態において、揺動装置は、レッグ41及び該レッグ41に支持される第2のフット350を揺動させることが可能であれば、第1のフット340を揺動させなくてもよい。
【0123】
・各実施形態において、オットマン40,40A〜40Hを、座部10に対して回転不能としてもよい。
・第1の実施形態において、レッグ41を第2の方向に移動させる移動機構をさらに設けてもよい。
【0124】
・各実施形態において、椅子型マッサージ機は、背もたれ部20を備えない構成であってもよい。また、椅子型マッサージ機は、肘掛30を備えない構成であってもよい。
・各実施形態において、マッサージ機は、脚揺動装置を備えた構成であれば、例えば、ベッド型のマッサージ機であってもよい。この場合、マッサージ機に横たわった使用者の脚部に対して、脚揺動装置によって揺動施術を施すことができる。
【0125】
・上記各実施形態では、脚揺動装置がマッサージ機と一体となっているが、脚揺動装置を、マッサージ機とは別体構成としてもよい。
【符号の説明】
【0126】
1…マッサージ機の一例としての椅子型マッサージ機、10…座部、41,41A〜41C…下腿支持手段の一例としてのレッグ、40,40A〜40H…脚揺動装置の一例としてのオットマン、42,42A〜42E…足先支持手段の一例としてのフット、44,44A…揺動装置、50…支持面、52A,52C…壁部、141,241…第1の支持部、142,242…第2の支持部、55,56…押圧施術手段の一例としてのエアバッグ、70,70A…移動機構、252…つま先支持部位、253…かかと支持部位、340…足先支持手段を構成する第1のフット(第1の支持部)、350…足先支持手段を構成する第2のフット(第1の支持部)、351…右脚用の支持部位、352…左脚用の支持部位、440…本体部の一例としてのフット本体部、441…可動部材としての足裏支持部、443…対向部の一例としての対向面、444…載置部の一例としての載置面、542…押出手段の一例としてのエアバッグ、545…収容部、642…対向部の一例としての対向部材、644…回転機構の一例としての駆動機構、645…押出手段の一例としての昇降機構、700…連結手段の一例としての連結部材、702…回転モータ(回転機構)、800,801…変位手段及び押圧施術手段の一例としてのエアバッグ、901…可動壁、950A〜950C…壁部、951…開口部。
【特許請求の範囲】
【請求項1】
使用者の脚部における下腿部分を支持するための下腿支持手段と、
使用者の脚部において下腿部分よりも足先に近い足先部分を支持するための足先支持手段と、
前記下腿支持手段によって支持される使用者の下腿部分に対して押圧施術を施すべく駆動する押圧施術手段と、
前記足先支持手段によって足先部分が支持される使用者の脚部を揺動させるべく駆動する揺動手段と、を備え、
前記揺動手段の駆動によって使用者の脚部を揺動させる場合には、前記足先支持手段によって足先部分が支持される使用者の下腿部分におけるふくらはぎ、及び使用者の脚部が並ぶ方向である規定の方向における両側の少なくとも一部と前記下腿支持手段とを非接触状態にさせることを特徴とする脚揺動装置。
【請求項2】
前記足先支持手段を前記下腿支持手段に対して相対移動させる移動機構をさらに備え、
前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有しており、
前記移動機構は、
前記足先支持手段と前記下腿支持手段との位置関係が、前記足先支持手段によって足先部分が支持される使用者のふくらはぎを前記下腿支持手段の前記支持面で支持可能となる第1の関係、又は前記足先支持手段によって足先部分が支持される使用者のふくらはぎを前記支持面から離間させる第2の関係となるように、前記足先支持手段を前記下腿支持手段に対して相対移動させることを特徴とする請求項1に記載の脚揺動装置。
【請求項3】
前記移動機構は、前記足先支持手段を移動させるための機構であり、
前記足先支持手段は、該足先支持手段に足先部分が支持される使用者のふくらはぎを前記下腿支持手段の前記支持面で支持可能となる第1の位置と、前記足先支持手段に足先部分が支持される使用者のふくらはぎを前記支持面から離間させる第2の位置との間で移動可能に構成されていることを特徴とする請求項2に記載の脚揺動装置。
【請求項4】
前記移動機構は、前記下腿支持手段を移動させるための機構であり、
前記下腿支持手段は、前記足先支持手段に足先部分が支持される使用者のふくらはぎを前記支持面で支持可能となる第1の位置と、前記足先支持手段に足先部分が支持される使用者のふくらはぎから前記支持面を離間させる第2の位置との間で移動可能に構成されていることを特徴とする請求項2に記載の脚揺動装置。
【請求項5】
前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、
前記足先支持手段は、
使用者のふくらはぎを前記支持面で支持可能となる位置で当該使用者の足先部分を支持する第1の支持部と、
使用者のふくらはぎを前記支持面から離間させる位置で当該使用者の足先部分を支持する第2の支持部とを有することを特徴とする請求項1に記載の脚揺動装置。
【請求項6】
前記第1及び第2の各支持部は、前記下腿支持手段の前記支持面と交差する方向において互いに異なる位置に配置されていることを特徴とする請求項5に記載の脚揺動装置。
【請求項7】
前記第1及び第2の各支持部は、前記下腿支持手段の前記支持面と交差する方向に沿って並ぶように配置されていることを特徴とする請求項5に記載の脚揺動装置。
【請求項8】
前記第2の支持部は、
前記第1の支持部で使用者の足先部分におけるかかと側を支持する場合に当該使用者の足先部分におけるつま先側を支持するつま先支持部位と、
使用者の足先部分におけるかかと側を支持するかかと支持部位とを有することを特徴とする請求項7に記載の脚揺動装置。
【請求項9】
前記かかと支持部位は、前記つま先支持部位を挟んで前記下腿支持手段の反対側に配置されていることを特徴とする請求項8に記載の脚揺動装置。
【請求項10】
前記下腿支持手段には、使用者の下腿部分におけるふくらはぎを支持する支持面に突設された一対の壁部が、前記支持面における前記規定の方向の両側に配置されており、
前記第2の支持部は、前記両壁部のうち一方の壁部の先端に設けられる右脚用の支持部位と、他方の壁部の先端に設けられる左脚用の支持部位とを有することを特徴とする請求項5に記載の脚揺動装置。
【請求項11】
前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、
前記足先支持手段は、本体部と、該本体部に対して可動する可動部材とを有し、
前記本体部は、使用者のふくらはぎが前記支持面によって支持されるように当該使用者の足先部分を支持可能に構成され、
前記可動部材は、前記本体部を挟んで前記下腿支持手段の反対側に位置する第1の位置と、前記本体部と前記下腿支持手段とを結ぶ方向とは異なる位置に設定された第2の位置とに設置可能とされており、
前記可動部材には、
該可動部材が第1の位置に位置する場合において前記本体部に足先部分が支持される使用者の足裏に対向する対向部と、
該可動部材が第2の位置に位置する場合において使用者のふくらはぎが前記支持面から離間するように当該使用者の足先部分が載置される載置部とが設けられていることを特徴とする請求項1に記載の脚揺動装置。
【請求項12】
前記載置部は、前記可動部材において前記対向部とは異なる位置に設けられていることを特徴とする請求項11に記載の脚揺動装置。
【請求項13】
前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、
前記足先支持手段には、使用者の足先部分の少なくとも一部を収容する収容部と、該収容部に収容される使用者の足先部分に対して前記収容部外に押し出すべく駆動する押出手段とが設けられており、
前記押出手段の非駆動時には、前記収容部に足先部分の少なくとも一部が収容される使用者のふくらはぎが前記下腿支持手段の前記支持面に支持され、
前記押出手段の駆動時には、使用者のふくらはぎが前記下腿支持手段の前記支持面から離間されることを特徴とする請求項1に記載の脚揺動装置。
【請求項14】
前記足先支持手段を、前記規定の方向に延びる軸線を中心に回転させる回転機構をさらに備え、
前記足先支持手段は、前記収容部に収容される使用者の足先部分の足裏に対向する対向部を有し、
前記押出手段は、前記収容部に収容される使用者の足先部分のかかと側に対向する位置に前記対向部が前記回転機構の駆動によって配置される場合に、前記対向部を、使用者のふくらはぎを前記下腿支持手段の前記支持面から離間させる方向に移動させることを特徴とする請求項13に記載の脚揺動装置。
【請求項15】
前記下腿支持手段と前記足先支持手段とを連結する連結手段と、
前記下腿支持手段及び前記足先支持手段を、前記規定の方向に沿って延びる回転軸を中心に回転させる回転機構と、を備えることを特徴とする請求項1に記載の脚揺動装置。
【請求項16】
前記下腿支持手段には、使用者の下腿部分を支持するための支持面と、該支持面を変位させるべく駆動する変位手段と、がさらに設けられ、
前記支持面は、前記変位手段によって、使用者の下腿部分に当接可能な位置と、下腿部分に当接不能な位置との間で変位することを特徴とする請求項1に記載の脚揺動装置。
【請求項17】
前記下腿支持手段には、該下腿支持手段によって支持される使用者の下腿部分を、前記規定の方向における両側から挟むように配置される一対の可動壁が設けられており、
前記両可動壁は、使用者の下腿部分を支持可能な位置と、下腿部分を支持不能な位置との間で移動可能に構成されていることを特徴とする請求項1に記載の脚揺動装置。
【請求項18】
前記下腿支持手段において使用者の両下腿部分の間となる位置、及び該両下腿部分の外側となる位置には、壁部がそれぞれ設けられ、
前記下腿支持手段において使用者のふくらはぎに対応する部分には、開口部が形成されていることを特徴とする請求項1に記載の脚揺動装置。
【請求項19】
使用者が着座する座部と、
前記座部に着座する使用者の脚部を支持しつつ揺動させる、請求項1〜請求項18のうち何れか一項に記載の脚揺動装置と、を備えることを特徴とする椅子型マッサージ機。
【請求項1】
使用者の脚部における下腿部分を支持するための下腿支持手段と、
使用者の脚部において下腿部分よりも足先に近い足先部分を支持するための足先支持手段と、
前記下腿支持手段によって支持される使用者の下腿部分に対して押圧施術を施すべく駆動する押圧施術手段と、
前記足先支持手段によって足先部分が支持される使用者の脚部を揺動させるべく駆動する揺動手段と、を備え、
前記揺動手段の駆動によって使用者の脚部を揺動させる場合には、前記足先支持手段によって足先部分が支持される使用者の下腿部分におけるふくらはぎ、及び使用者の脚部が並ぶ方向である規定の方向における両側の少なくとも一部と前記下腿支持手段とを非接触状態にさせることを特徴とする脚揺動装置。
【請求項2】
前記足先支持手段を前記下腿支持手段に対して相対移動させる移動機構をさらに備え、
前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有しており、
前記移動機構は、
前記足先支持手段と前記下腿支持手段との位置関係が、前記足先支持手段によって足先部分が支持される使用者のふくらはぎを前記下腿支持手段の前記支持面で支持可能となる第1の関係、又は前記足先支持手段によって足先部分が支持される使用者のふくらはぎを前記支持面から離間させる第2の関係となるように、前記足先支持手段を前記下腿支持手段に対して相対移動させることを特徴とする請求項1に記載の脚揺動装置。
【請求項3】
前記移動機構は、前記足先支持手段を移動させるための機構であり、
前記足先支持手段は、該足先支持手段に足先部分が支持される使用者のふくらはぎを前記下腿支持手段の前記支持面で支持可能となる第1の位置と、前記足先支持手段に足先部分が支持される使用者のふくらはぎを前記支持面から離間させる第2の位置との間で移動可能に構成されていることを特徴とする請求項2に記載の脚揺動装置。
【請求項4】
前記移動機構は、前記下腿支持手段を移動させるための機構であり、
前記下腿支持手段は、前記足先支持手段に足先部分が支持される使用者のふくらはぎを前記支持面で支持可能となる第1の位置と、前記足先支持手段に足先部分が支持される使用者のふくらはぎから前記支持面を離間させる第2の位置との間で移動可能に構成されていることを特徴とする請求項2に記載の脚揺動装置。
【請求項5】
前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、
前記足先支持手段は、
使用者のふくらはぎを前記支持面で支持可能となる位置で当該使用者の足先部分を支持する第1の支持部と、
使用者のふくらはぎを前記支持面から離間させる位置で当該使用者の足先部分を支持する第2の支持部とを有することを特徴とする請求項1に記載の脚揺動装置。
【請求項6】
前記第1及び第2の各支持部は、前記下腿支持手段の前記支持面と交差する方向において互いに異なる位置に配置されていることを特徴とする請求項5に記載の脚揺動装置。
【請求項7】
前記第1及び第2の各支持部は、前記下腿支持手段の前記支持面と交差する方向に沿って並ぶように配置されていることを特徴とする請求項5に記載の脚揺動装置。
【請求項8】
前記第2の支持部は、
前記第1の支持部で使用者の足先部分におけるかかと側を支持する場合に当該使用者の足先部分におけるつま先側を支持するつま先支持部位と、
使用者の足先部分におけるかかと側を支持するかかと支持部位とを有することを特徴とする請求項7に記載の脚揺動装置。
【請求項9】
前記かかと支持部位は、前記つま先支持部位を挟んで前記下腿支持手段の反対側に配置されていることを特徴とする請求項8に記載の脚揺動装置。
【請求項10】
前記下腿支持手段には、使用者の下腿部分におけるふくらはぎを支持する支持面に突設された一対の壁部が、前記支持面における前記規定の方向の両側に配置されており、
前記第2の支持部は、前記両壁部のうち一方の壁部の先端に設けられる右脚用の支持部位と、他方の壁部の先端に設けられる左脚用の支持部位とを有することを特徴とする請求項5に記載の脚揺動装置。
【請求項11】
前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、
前記足先支持手段は、本体部と、該本体部に対して可動する可動部材とを有し、
前記本体部は、使用者のふくらはぎが前記支持面によって支持されるように当該使用者の足先部分を支持可能に構成され、
前記可動部材は、前記本体部を挟んで前記下腿支持手段の反対側に位置する第1の位置と、前記本体部と前記下腿支持手段とを結ぶ方向とは異なる位置に設定された第2の位置とに設置可能とされており、
前記可動部材には、
該可動部材が第1の位置に位置する場合において前記本体部に足先部分が支持される使用者の足裏に対向する対向部と、
該可動部材が第2の位置に位置する場合において使用者のふくらはぎが前記支持面から離間するように当該使用者の足先部分が載置される載置部とが設けられていることを特徴とする請求項1に記載の脚揺動装置。
【請求項12】
前記載置部は、前記可動部材において前記対向部とは異なる位置に設けられていることを特徴とする請求項11に記載の脚揺動装置。
【請求項13】
前記下腿支持手段は、使用者の下腿部分におけるふくらはぎを支持する支持面を有し、
前記足先支持手段には、使用者の足先部分の少なくとも一部を収容する収容部と、該収容部に収容される使用者の足先部分に対して前記収容部外に押し出すべく駆動する押出手段とが設けられており、
前記押出手段の非駆動時には、前記収容部に足先部分の少なくとも一部が収容される使用者のふくらはぎが前記下腿支持手段の前記支持面に支持され、
前記押出手段の駆動時には、使用者のふくらはぎが前記下腿支持手段の前記支持面から離間されることを特徴とする請求項1に記載の脚揺動装置。
【請求項14】
前記足先支持手段を、前記規定の方向に延びる軸線を中心に回転させる回転機構をさらに備え、
前記足先支持手段は、前記収容部に収容される使用者の足先部分の足裏に対向する対向部を有し、
前記押出手段は、前記収容部に収容される使用者の足先部分のかかと側に対向する位置に前記対向部が前記回転機構の駆動によって配置される場合に、前記対向部を、使用者のふくらはぎを前記下腿支持手段の前記支持面から離間させる方向に移動させることを特徴とする請求項13に記載の脚揺動装置。
【請求項15】
前記下腿支持手段と前記足先支持手段とを連結する連結手段と、
前記下腿支持手段及び前記足先支持手段を、前記規定の方向に沿って延びる回転軸を中心に回転させる回転機構と、を備えることを特徴とする請求項1に記載の脚揺動装置。
【請求項16】
前記下腿支持手段には、使用者の下腿部分を支持するための支持面と、該支持面を変位させるべく駆動する変位手段と、がさらに設けられ、
前記支持面は、前記変位手段によって、使用者の下腿部分に当接可能な位置と、下腿部分に当接不能な位置との間で変位することを特徴とする請求項1に記載の脚揺動装置。
【請求項17】
前記下腿支持手段には、該下腿支持手段によって支持される使用者の下腿部分を、前記規定の方向における両側から挟むように配置される一対の可動壁が設けられており、
前記両可動壁は、使用者の下腿部分を支持可能な位置と、下腿部分を支持不能な位置との間で移動可能に構成されていることを特徴とする請求項1に記載の脚揺動装置。
【請求項18】
前記下腿支持手段において使用者の両下腿部分の間となる位置、及び該両下腿部分の外側となる位置には、壁部がそれぞれ設けられ、
前記下腿支持手段において使用者のふくらはぎに対応する部分には、開口部が形成されていることを特徴とする請求項1に記載の脚揺動装置。
【請求項19】
使用者が着座する座部と、
前記座部に着座する使用者の脚部を支持しつつ揺動させる、請求項1〜請求項18のうち何れか一項に記載の脚揺動装置と、を備えることを特徴とする椅子型マッサージ機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2013−468(P2013−468A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−136668(P2011−136668)
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]