
脚揺動装置及びマッサージ機
【課題】揺動機構により使用者の脚を揺動させた場合であっても、使用者の両足を接触させ難くすることができ、効果的に揺動を伝えることができる脚揺動装置及びマッサージ機を提供する。
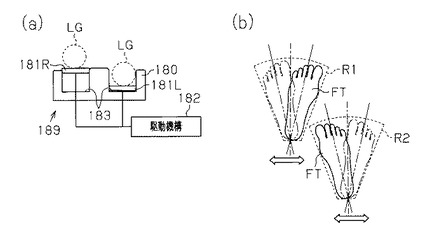
【解決手段】脚揺動装置としてのオットマン12は、使用者の脚を施術する脚施術部30と、使用者の脚を揺動させる揺動機構16とを備えている。脚施術部30には、揺動機構16によって使用者の脚を揺動させる場合に、使用者の一方の足が揺動することが許可される第1揺動領域R1と、使用者の他方の足が揺動することが許可される第2揺動領域R2との間隔を拡大させる揺動間隔拡大機構49が設けられた。
【解決手段】脚揺動装置としてのオットマン12は、使用者の脚を施術する脚施術部30と、使用者の脚を揺動させる揺動機構16とを備えている。脚施術部30には、揺動機構16によって使用者の脚を揺動させる場合に、使用者の一方の足が揺動することが許可される第1揺動領域R1と、使用者の他方の足が揺動することが許可される第2揺動領域R2との間隔を拡大させる揺動間隔拡大機構49が設けられた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、使用者の脚を揺動させる揺動機構を備えた脚揺動装置及びマッサージ機に係り、詳しくは、使用者の脚を保持する脚保持部と、使用者の足を保持する足保持部とのうち少なくともいずれか一方を備えた脚揺動装置及びマッサージ機に関する。
【背景技術】
【0002】
従来のマッサージ機には、特許文献1に示すように、使用者の脚を支持するオットマンと、使用者の臀部を支持する座部と、使用者の背中を支持する背もたれと、使用者の脚を揺動させる揺動機構とが設けられている。このマッサージ機において揺動機構により使用者の脚が揺動させられたときには、それに伴って足にも揺動が伝達され、足が左右に振れる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−237295号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、このようなマッサージ機において、効果的な施術を行うためにも、脚や足の揺動量を大きくすることが望ましいが、揺動機構により使用者の脚を揺動させる際に、使用者の足が左右に振れて、その両足が接触するおそれがあった。
【0005】
本発明は、このような事情に鑑みてなされたものである。その目的は、使用者の脚を揺動させた場合であっても、使用者の両足を接触させ難くすることができ、効果的に揺動を伝えることができる脚揺動装置及びマッサージ機を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の脚揺動装置は、使用者の脚を保持する脚保持部と、使用者の足を保持する足保持部とのうち少なくともいずれか一方を備え、使用者の脚を揺動させることで施術する揺動機構を備えた脚揺動装置において、前記脚保持部及び前記足保持部のうち少なくともいずれか一方には、前記揺動機構によって使用者の脚を揺動させる場合に、使用者の一方の足が揺動することが許可される第1揺動領域と、使用者の他方の足が揺動することが許可される第2揺動領域との間隔を拡大させる揺動間隔拡大機構が設けられたことを要旨とする。
【0007】
本発明の脚揺動装置において、前記揺動間隔拡大機構は、前記揺動機構による揺動が行われているときには、前記揺動機構による揺動が行われる前よりも、前記第1揺動領域と前記第2揺動領域との間隔を拡大させることが好ましい。
【0008】
本発明の脚揺動装置において、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に、底面及び側壁が設けられ、前記揺動間隔拡大機構は、前記底面及び前記側壁のうち少なくともいずれか一方を、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように変位させることが好ましい。
【0009】
本発明の脚揺動装置において、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に、底面及び側壁が設けられ、前記揺動間隔拡大機構は、前記底面及び前記側壁が設けられた前記脚保持部及び前記足保持部のうち少なくともいずれか一方を、該底面及び該側壁を一体として、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように変位させることが好ましい。
【0010】
本発明の脚揺動装置において、前記揺動間隔拡大機構は、膨張収縮駆動させるエアバックを用いて構成されることが好ましい。
本発明の脚揺動装置において、前記揺動間隔拡大機構は、使用者の足の内側方向に対する揺動幅を、外側方向に対する揺動幅よりも小さくすることで、前記第1揺動領域と前記第2揺動領域との間隔を拡大させることが好ましい。
【0011】
本発明の脚揺動装置において、前記揺動間隔拡大機構は、前記脚揺動装置の角度に応じて前記第1揺動領域と前記第2揺動領域との間隔を変化させることが好ましい。
本発明の脚揺動装置において、前記揺動間隔拡大機構は、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に設けられた底面及び側壁を含む構成であり、前記底面及び前記側壁のうち少なくともいずれか一方は、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に対して傾斜して形成されていることが好ましい。
【0012】
本発明のマッサージ機において、臀部を支持する座部と背中を支持する背もたれとを備えたマッサージ機において、前記脚揺動装置を備えたことを要旨とする。
【発明の効果】
【0013】
本発明によれば、揺動機構により使用者の脚を揺動させた場合であっても、使用者の両足を接触させ難くすることができ、効果的に揺動を伝えることができる。
【図面の簡単な説明】
【0014】
【図1】第1実施形態におけるマッサージ機の概略構成を説明するための側面図である。
【図2】第1実施形態におけるオットマンの概略構成を説明するための正面図である。
【図3】第1実施形態におけるオットマンについて、(a)、(c)、(f)及び(h)は概略構成を説明するための正面図であり、(b)は(a)のA−A線の断面構造を示す断面図であり、(g)は(f)のB−B線の断面構造を示す断面図であり、(d)及び(i)は使用者の脚を示す説明図であり、(e)及び(j)は使用者の脚を示す説明図である。
【図4】第1実施形態におけるマッサージ機の制御構成を示すブロック図。
【図5】(a)及び(c)は、第2実施形態におけるオットマンの概略構成を説明するための正面図であり、(b)は、(a)のC−C線の断面構造を示す断面図であり、(d)は、(c)のD−D線の断面構造を示す断面図である。
【図6】(a)及び(b)は、第3実施形態におけるオットマンの概略構成を説明するための正面図である。
【図7】(a)及び(b)は、第4実施形態における足施術部を示す底面図である。
【図8】(a)及び(b)は、第5実施形態における脚施術部を示す断面図であり、(c)は使用者の足を示す説明図である。
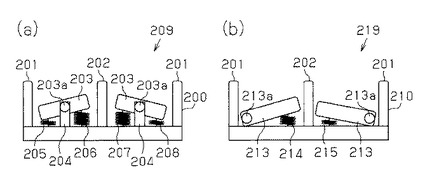
【図9】(a)及び(b)は、第6実施形態における脚施術部を示す断面図である。
【図10】(a)及び(b)は、第7実施形態における脚施術部を示す断面図である。
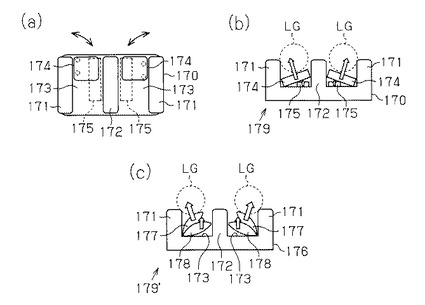
【図11】は、第8実施形態における脚施術部について、(a)、(c)及び(d)は正面図であり、(b)は断面図である。
【図12】第9実施形態における脚施術部について、(a)は正面図であり、(b)及び(c)は断面図である。
【図13】(a)は、第10実施形態における脚施術部を示す断面図であり、(b)は使用者の足を示す説明図である。
【図14】第11実施形態における脚施術部を示す正面図である。
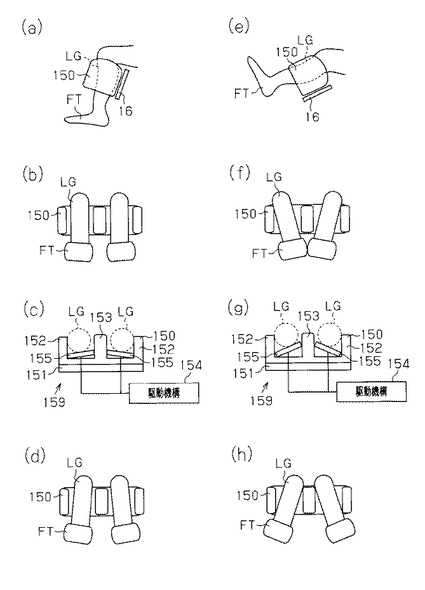
【図15】第12実施形態におけるオットマンついて、(a)及び(e)は側面図であり、(b)、(d)、(f)及び(h)は説明図であり、(c)及び(g)は断面図である。
【図16】(a)及び(b)は、第13実施形態における脚施術部を示す断面図である。
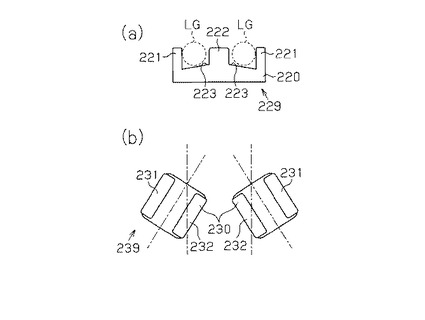
【図17】第14実施形態における脚施術部について、(a)は断面図であり、(b)は正面図である。
【発明を実施するための形態】
【0015】
(第1実施形態)
以下、本発明を具体化した椅子型のマッサージ機(以下、単に「マッサージ機」という。)を示す第1実施形態を図1〜図4に従って説明する。なお、以下における本明細書中の説明において、「前後方向」とはマッサージ機に着座した使用者を基準とした方向に該当する方向である。また、「幅方向」とは使用者の左右方向に該当する方向であり、「上下方向」とはマッサージ機が設置される設置面と直交する方向に該当する方向であるものとする。
【0016】
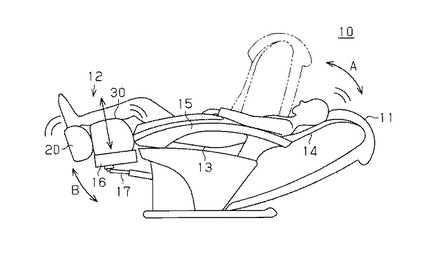
図1に示すように、本実施形態のマッサージ機10は、使用者の体幹を保持するためのマッサージ椅子本体11と、使用者の脚を保持するためのオットマン12とから構成されている。
【0017】
マッサージ椅子本体11には、使用者の臀部を支持する座部13と、使用者の背中を支持する背もたれ部14と、使用者の腕を支持する一対の肘掛部15とが設けられている。また、この背もたれ部14は、幅方向を中心軸として回動可能であり、矢印Aに示すように、座部13に対する傾斜を変更させることができる。
【0018】
オットマン12は、マッサージ椅子本体11の座部13の前端に延設してなり、幅方向を中心軸として座部13に対して回動可能であり、矢印Bに示すように、座部13に対する傾斜を変更させることができる。このオットマン12は、使用者の足を施術するための足施術部20と、使用者の脚(特に下腿部)を施術するための脚施術部30と、を含むように構成されている。また、このオットマン12は、リンク部材17により支持され、使用者の脚及び足を揺動させる揺動機構16を含むように構成されている。揺動機構16は、脚施術部30において使用者の脚が保持される面の裏面から配設されており、脚施術部30を幅方向に揺動させることで、脚施術部30に保持されている使用者の脚及び足を幅方向に揺動させる。つまり、本実施形態におけるオットマン12は、使用者の脚を揺動させる脚揺動装置として機能する。また、ここでの「脚」は足首から元の部分を意味し、「足」は足首から先の部分を意味し、特に、ここでの「下腿部」は膝から足首までの部分を意味する。また、以下、揺動機構16による揺動が行われているときを単に「揺動時」と示し、揺動機構16による揺動が行われていないときを単に「揺動停止時」と示す。
【0019】
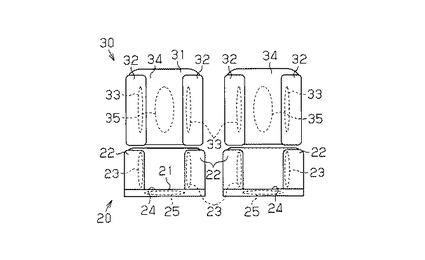
図2を参照して、足施術部20及び脚施術部30の構成について説明する。
図2に示すように、足施術部20において、使用者の足を保持するための保持面21には、使用者の両足を両側方から覆う側壁22が形成されており、その側壁22には、膨張収縮駆動させるエアバック23が埋設されている。また、保持面21には、使用者の両足裏と面する底面24が形成されており、その底面24にも、エアバック25が埋設されている。これらエアバック23,25の駆動により、揺動機構16による揺動とは別で、使用者の足を施術することとなる。なお、本実施形態において、この足施術部20が足保持部に相当する。
【0020】
脚施術部30において、使用者の脚を保持するための保持面31には、使用者の両脚を両側方から覆う側壁32が形成されており、その側壁32には、膨張収縮駆動させるエアバック33が埋設されている。また、保持面31には、使用者の両脚を脚裏側と面する底面34が形成されており、その底面34にも、エアバック35が埋設されている。これらエアバック33,35の駆動により、揺動機構16による揺動とは別で、使用者の脚を施術することとなる。なお、本実施形態において、この脚施術部30が脚保持部に相当する。
【0021】
また、本実施形態においては、足施術部20及び脚施術部30は、それぞれ使用者の左右の脚毎に別体に形成されているが、同じ方の脚や足を保持する足施術部20及び脚施術部30はそれぞれ連結されている。また、足施術部20及び脚施術部30は、揺動時であるか否かによって変位することとなる。
【0022】
図3を参照して、足施術部20及び脚施術部30を変位させる構成について説明する。
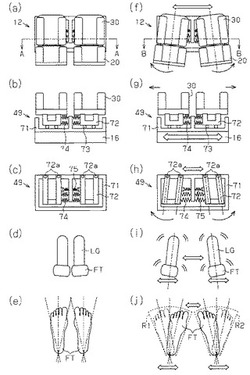
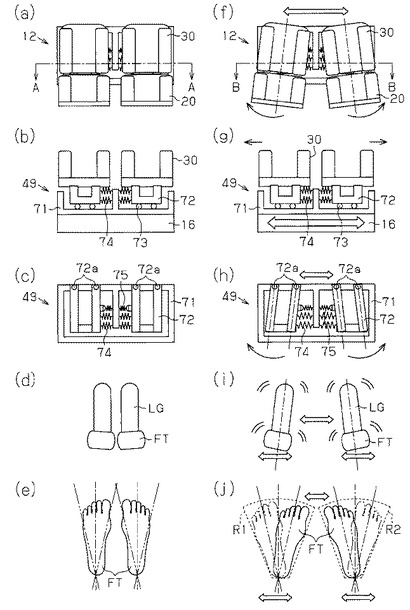
オットマン12における足施術部20及び脚施術部30は、揺動停止時では、図3(a)に示すように、幅方向に対して略垂直方向に並設されている。なお、本実施形態において、このように足施術部20及び脚施術部30が配置された位置を、揺動停止時における第1の位置と示す。
【0023】
その一方で、足施術部20及び脚施術部30は、揺動時では、図3(f)に示すように、略垂直方向よりも前後方向を中心軸として所定角度だけ回動した位置に並設される。なお、本実施形態において、このように足施術部20及び脚施術部30が配置された位置を、揺動されている場合における第2の位置と示す。
【0024】
この脚施術部30の保持面31の裏側には、図3(b)及び図3(c)に示すように、足施術部20及び脚施術部30を変位させる揺動間隔拡大機構49が配設されている。揺動間隔拡大機構49は、連結フレーム71と、幅方向に変位可能な可動部材72と、可動部材72の変位を導くガイド部73と、可動部材72を変位させるエアバック74と、可動部材72に弾性力を加える弾性部材75とを含む構成である。
【0025】
連結フレーム71は、その底面で揺動機構16と当接するとともに、その上面で一対の可動部材72を支持し、揺動機構16からの揺動を可動部材72に伝達する。可動部材72は、連結フレーム71に対して回動軸72aを中心に回動自在に軸着されており、幅方向に変位可能となる。また、この可動部材72は、使用者の両脚毎に配設されている一対の脚施術部30を支持し、可動部材72から伝達された揺動機構16からの揺動を脚施術部30に伝達する。ガイド部73は、連結フレーム71に沿って幅方向に変位するように可動部材72を導く。
【0026】
膨張収縮駆動させるエアバック74は、その駆動により、可動部材72を幅方向に変位させる。特に、揺動時では、エアバック74は、図3(g)及び図3(h)に示すように、可動部材72を幅方向に沿って外側に膨張することで回動軸72aを中心に回動させる。これによって、エアバック74は、可動部材72により支持されている脚施術部30を、連結されている足施術部20とともに、前後方向を回動軸として外側に傾斜させることとなる(第2の位置)。
【0027】
弾性部材75は、本実施形態においては引っ張りばねであり、エアバック74が膨張した状態から収縮した状態となった場合に、可動部材72を幅方向に向かって内側に回動させる。これによって、弾性部材75は、可動部材72により支持されている脚施術部30を、連結されている足施術部20とともに、前後方向を回動軸として内側に傾斜させることとなる(第1の位置)。
【0028】
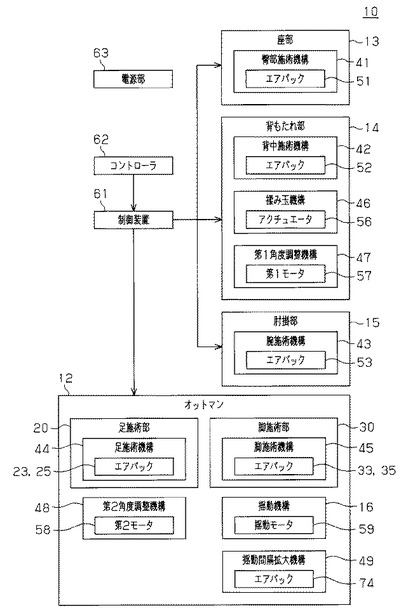
図4を参照して、マッサージ機10の制御機構について説明する。
マッサージ機10において、座部13には、エアバック51の膨張及び収縮を制御する臀部施術機構41が設けられている。背もたれ部14には、エアバック52の膨張及び収縮を制御する背中施術機構42が設けられている。また、背もたれ部14には、揉み玉等のアクチュエータ56を駆動制御する揉み玉機構46と、座部13に対する傾斜を変更させるための第1モータ57を駆動制御する第1角度調整機構47と、が設けられている。肘掛部15には、エアバック53の膨張及び収縮を制御する腕施術機構43が設けられている。
【0029】
オットマン12の足施術部20には、エアバック23,25の膨張及び収縮を制御する足施術機構44が設けられている。オットマン12の脚施術部30には、エアバック33,35の膨張及び収縮を制御する脚施術機構45が設けられている。オットマン12には、座部13に対する傾斜を変更させるための第2モータ58を駆動制御する第2角度調整機構48が設けられている。
【0030】
特に、オットマン12には、揺動モータ59の駆動により脚施術部30を幅方向に揺動させるための揺動機構16が設けられている。また、オットマン12には、エアバック74の膨張及び収縮を制御することで、揺動機構16により揺動される使用者の脚や足の揺動領域を調整するための揺動間隔拡大機構49が設けられている。
【0031】
各施術機構41〜45には、対応するエアバック23,25,33,35,51〜53,74にエアを供給するためのエアポンプと、エアポンプから対応するエアバックへのエアの供給量を調整するための電磁弁とが設けられている(いずれも図示略)。
【0032】
マッサージ機10には、オットマン12、座部13、背もたれ部14及び肘掛部15の各機構の制御を行う制御装置61と、使用者により各機構を操作するためのコントローラ62と、が設けられている。また、マッサージ機10には、電源部63が設けられており、制御装置61、コントローラ62及び各機構に電力を供給する。なお、図4においては、電力の供給を示す線を省略して表している。制御装置61は、各施術機構41〜45、揉み玉機構46、第1角度調整機構47、第2角度調整機構48、オットマン12の揺動機構16及び揺動間隔拡大機構49のそれぞれの制御を行う。
【0033】
(実施形態の作用)
次に、図3を参照して、本実施形態の作用について説明する。なお、図3(e)においては、揺動されていない場合における使用者の足FTを実線で、その使用者の足の中心を一点鎖線でそれぞれ示す。また、両足の揺動領域が重なり、使用者の足が視認し易くなるため、仮に揺動機構16による揺動が行われた場合における使用者の足や各揺動領域を示さずに、使用者の足の中心のみを二点鎖線で示す。また、図3(j)においては、最も内側に揺動する場合における使用者の足及びその中心を実線で示し、最も外側に揺動する場合における使用者の足及びその中心を二点鎖線で示す。また、揺動されていない場合における使用者の足の中心を一点鎖線で示す。また、使用者の足の一方が揺動する揺動領域を第1揺動領域R1として、他方が揺動する揺動領域を第2揺動領域R2として、それぞれ破線で示す。
【0034】
まず、揺動機構16の動作が停止している場合、図3(b)及び図3(c)に示すように、揺動間隔拡大機構49によりエアバック74が収縮されており、可動部材72が弾性部材75の弾性力により幅方向に対して内側に配置されている。このため、足施術部20及び脚施術部30は、図3(a)に示すように、第1の位置に配置されている。このように足施術部20及び脚施術部30が第1の位置に配置されることで、図3(d)に示すように、使用者の脚LG及び足FTを幅方向に対して外側に開きにくくなる。そして、図3(e)に示すように、両足の爪先が揺動により接触する距離に使用者の足FTが保持される。つまり、足施術部20及び脚施術部30が第1の位置に配置されたまま、仮に揺動機構16による揺動が行われた場合には、両足の揺動領域(第1揺動領域と第2揺動領域と)が重なり、両足の爪先が揺動により接触することとなる。
【0035】
そして、制御装置61は、コントローラ62から揺動機構16の動作を実行する旨の信号を受信したとき、図3(g)及び図3(h)に示すように、揺動間隔拡大機構49にエアバック74を膨張させる。これによって、弾性部材75の弾性力に対抗して、回動軸72aを中心として可動部材72を幅方向に対して外側に回動させ、図3(f)に示すように、足施術部20及び脚施術部30を第1の位置から第2の位置に移動させる。
【0036】
その後、制御装置61は、揺動機構16により揺動モータ59を揺動させることで、連結フレーム71を揺動させ、更に可動部材72を介して、足施術部20及び脚施術部30を揺動させる。このように足施術部20及び脚施術部30が第2の位置に配置されることで、図3(i)に示すように、使用者の脚LG及び足FTを幅方向に対して外側に開く。そして、図3(j)に示すように、使用者の両足間が広がり、両足の爪先が揺動により接触しない距離に使用者の足FTが保持される。つまり、足施術部20及び脚施術部30が第2の位置に配置されることで、揺動機構16による揺動が行われた場合には、両足の揺動領域(第1揺動領域R1と第2揺動領域R2と)の間隔が第1の位置よりも拡大される。これによって、両足の揺動領域が重ならずに、両足の爪先が揺動により接触しないこととなる。また、このような構成において、使用者の足FTが内側に揺動する内側揺動幅と、外側に揺動する外側揺動幅とが略均等となっている。
【0037】
続いて、制御装置61は、コントローラ62から揺動機構16の動作を停止する旨の信号を受信したとき、揺動機構16による揺動を停止させる。そして、制御装置61は、図3(a)に示すように、揺動間隔拡大機構49に足施術部20及び脚施術部30を第2の位置から第1の位置に移動させる。具体的には、制御装置61は、図3(b)及び図(c)に示すように、揺動間隔拡大機構49にエアバック74を収縮させることで、弾性部材75の弾性力により、回動軸72aを中心として可動部材72を幅方向に対して内側に回動させる。そして、図3(a)に示すように、足施術部20及び脚施術部30を第2の位置から第1の位置に移動させる。
【0038】
また、本実施形態において、制御装置61は、コントローラ62から揺動機構16の揺動量を変更する旨の信号を受信したとき、揺動機構16の揺動量を変更する。また、制御装置61は、コントローラ62から揺動機構16の揺動速度を変更する旨の信号を受信したとき、揺動機構16の揺動速度を変更する。なお、他の機構についても上記と同様に、コントローラ62から制御装置61に送信される信号に応じて制御が行われる。例えば、制御装置61は、コントローラ62からオットマン12を所定角度に傾斜させる旨の信号を受信したとき、第2角度調整機構48により第2モータ58を駆動させ、オットマン12を所定角度に傾斜させる。そして、オットマン12が傾斜すると、制御装置61は、オットマン12の傾斜角度を記憶する。
【0039】
(実施形態の効果)
本実施形態では、以下に示す効果を得ることができる。
(1)揺動機構16により使用者の脚を揺動させた場合であっても、揺動間隔拡大機構49により第1揺動領域R1と第2揺動領域R2との間隔を拡大させるように調整することで、使用者の両足を接触させ難くすることができ、効果的に揺動を伝えることができる。
【0040】
(2)使用者の脚が揺動されているときには、揺動される前よりも、第1揺動領域R1と第2揺動領域R2との間隔を拡大させる。このため、揺動される前においては、揺動されているときにおける構成と拘わらず、他の施術を効果的に行うことができる。その一方で、揺動されているときには、揺動間隔拡大機構49により使用者の両足を接触させ難くすることができ、効果的に揺動を伝えることができる。
【0041】
(3)脚施術部30自体を変位させるため、側壁32及び底面34を一体として、脚施術部30全体を動作させることができ、変位に対する違和感を使用者に与え難くすることができる。
【0042】
(4)揺動機構16による揺動と、それを除いた他の施術装置(例えば、臀部施術機構41、背中施術機構42、腕施術機構43、揉み玉機構46など)による施術とを組み合わせることによって、様々な施術を効果的に行うことができる。
【0043】
(第2実施形態)
図5を参照して本発明の第2実施形態について説明する。
本実施形態のマッサージ機は、上記実施形態のマッサージ機の一部を変更したものとして構成されている。このため、以下では上記実施形態のマッサージ機と異なる点の詳細を説明し、同実施形態と共通する構成については同一の符号を付してその説明の一部または全部を省略する。また、第3実施形態以降においても同じように、共通する構成については同一の符号を付してその説明の一部または全部を省略する。
【0044】
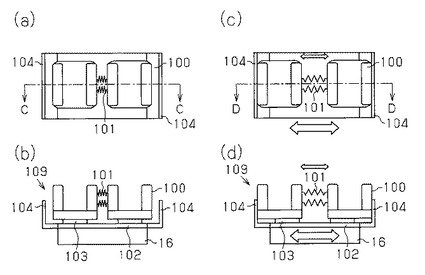
第2実施形態のマッサージ機では、足施術部20と脚施術部30とを回動させずに、幅方向に移動するように構成した。
図5に示すように、脚施術部100は、両方の脚をそれぞれ別体で保持するとともに、それらの間にはエアバック101が配設されている。図5(b)に示すように、揺動機構16の上方には、可動部材102が配設されている。可動部材102は、ガイド103を介して揺動機構16による揺動を脚施術部100に伝達させるとともに、ガイド103に沿って脚施術部100を幅方向に移動させる機能を有する。ストッパ104は、脚施術部100の移動方向に配設されており、脚施術部100の移動を停止させる。
【0045】
揺動停止時では、図5(a)及び図5(b)に示すように、エアバック101が収縮しており、脚施術部100が幅方向に対して内側に配置されている(第1の位置)。その一方で、揺動時では、図5(c)及び図5(d)に示すように、エアバック101が膨張することによって、脚施術部100が幅方向に対して外側に移動する(第2の位置)。このため、脚施術部100を幅方向に対して外側に移動させることができる。これによって、使用者の両脚の間隔及び使用者の両足の間隔が開き、揺動時では両足の揺動領域の間隔を拡大することができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、エアバック101及び可動部材102が揺動間隔拡大機構109に相当する。
【0046】
(第3実施形態)
図6を参照して本発明の第3実施形態について説明する。
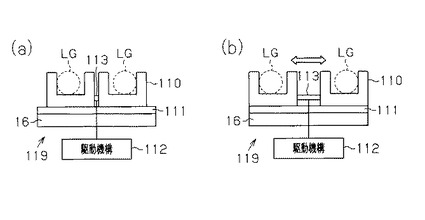
第3実施形態のマッサージ機では、足施術部にエアバックを用いずに他の駆動機構を用いて変位させるように構成した。
【0047】
例えば、図6に示すように、脚施術部110は、空気圧シリンダ113を幅方向に伸縮させる駆動機構112を備えてもよい。連結フレーム111に支持された脚施術部110は、両方の足をそれぞれ別体で保持し、それぞれの間には空気圧シリンダ113が配設されている。揺動停止時では、図6(a)に示すように、空気圧シリンダ113が収縮することによって、脚施術部110が幅方向に対して内側に配設される(第1の位置)。その一方で、揺動時では、図6(b)に示すように、空気圧シリンダ113が延伸することによって、脚施術部110が幅方向に対して外側に配設される(第2の位置)。これによって、使用者の両脚の間隔及び使用者の両足の間隔が開き、揺動時では両足の揺動領域の間隔を拡大することができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、空気圧シリンダ113及び駆動機構112が揺動間隔拡大機構119に相当する。
【0048】
(第4実施形態)
図7を参照して本発明の第4実施形態について説明する。
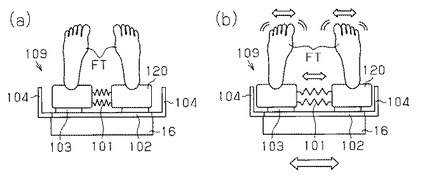
第4実施形態のマッサージ機では、足施術部を揺動させる揺動機構を備えるように構成した。
【0049】
図5に示す第2実施形態に本実施形態を追加した場合を具体的な一例として説明する。図7に示すように、足施術部120は、両方の足をそれぞれ別体で保持し、それぞれの間には、エアバック101が配設されている。揺動停止時では、図7(a)に示すように、エアバック101が収縮しており、足施術部120が幅方向に対して内側に配置されている(第1の位置)。その一方で、揺動時では、図7(b)に示すように、エアバック101が膨張することによって、足施術部120が幅方向に対して外側に移動する(第2の位置)。これによって、脚施術部を介することなく、足施術部120を直接に揺動させることができるとともに、揺動時では両足の揺動領域の間隔を拡大することができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、エアバック101及び可動部材102が揺動間隔拡大機構109に相当する。
【0050】
(第5実施形態)
図8を参照して本発明の第5実施形態について説明する。
第5実施形態のマッサージ機では、更に使用者の足が配置される角度を変化させることによって、各揺動領域の間隔を調整するように構成した。なお、第5実施形態以降については、揺動機構16を図示せず、省略する。
【0051】
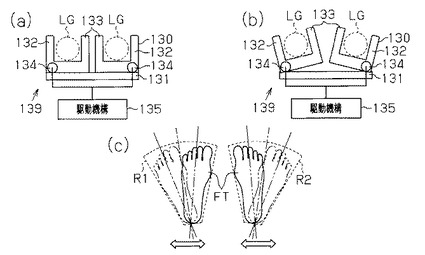
図8に示すように、脚施術部130は、両方の脚LGをそれぞれ別体で保持し、使用者の脚LGの外側に面する側壁132側の回動軸134を中心に、連結フレーム131に対して回動可能に軸着されている。揺動停止時では、図8(a)に示すように、脚施術部130は、回動軸134を中心に回動されることなく、その底面が連結フレーム131に対して水平となるように配置される(第1の位置)。このため、使用者の脚LGが側壁132,133のいずれに大きく偏ることなく脚施術部130に保持される。
【0052】
その一方で、揺動時では、図8(b)に示すように、モータ等からなる駆動機構135の駆動により、脚施術部130は、回動軸134を中心に回動され、その底面が幅方向に対して外側に向くように配置される(第2の位置)。このため、使用者の脚LGが外側の側壁132に当接するように脚施術部130に保持される。
【0053】
このように、揺動時では、脚施術部130において、使用者の両脚が離れるように変位するとともに、その底面が外側に向かうように傾斜する。これによって、図8(c)に示すように、使用者の足FTが外側に開き、爪先も外側に向き、使用者の足FTの爪先が、内側よりも外側に揺動し易くなる。つまり、脚施術部が第2の位置に配置されることで、各揺動領域R1,R2として、外側揺動幅よりも内側揺動幅のほうが小さくなり、揺動時では、両足の揺動領域の間隔が拡大される。これによって、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。
【0054】
また、側壁132,133の間隔が変化するわけではないので、使用者の両方の脚がずれにくく、使用者の脚LGや足FTなどの他の部位との組み合わせとして、効果的に施術を行うことができる。なお、本実施形態において、駆動機構135が揺動間隔拡大機構139に相当する。
【0055】
(第6実施形態)
図9を参照して本発明の第6実施形態について説明する。
第6実施形態のマッサージ機では、足施術部及び脚施術部全体を変位させないが、足施術部及び脚施術部における一部の部材を変位させるように構成した。
【0056】
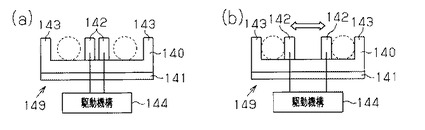
図9に示すように、脚施術部140において、使用者の脚の内側に面する側壁142が駆動機構144の駆動により変位可能である。具体的には、揺動停止時では、図9(a)に示すように、内側の側壁142が内側の位置に配置される(第1の位置)。その一方で、揺動時では、図9(b)に示すように、内側の側壁142が外側に配置される(第2の位置)。なお、脚施術部140自体は、連結フレーム141に対して移動しないように構成されており、外側の側壁143自体も連結フレーム141に対して移動しないように構成されている。これによって、使用者の両脚の間隔及び使用者の両足の間隔が開き、脚施術部140を揺動させることができるとともに、揺動時では両足の揺動領域の間隔を拡大することができる。
【0057】
このように、脚施術部140全体が変位するわけではなく、脚施術部140の一部である内側の側壁142が変位するため、変位させる部材が少なく、アクチュエータの小型化を図ることができ、装置全体の小型化、軽量化を図ることができる。なお、本実施形態において、内側の側壁142及び駆動機構144が揺動間隔拡大機構149に相当する。
【0058】
(第7実施形態)
図10を参照して本発明の第7実施形態について説明する。
第7実施形態のマッサージ機では、足施術部及び脚施術部の少なくともいずれか一方における底面を変位させるように構成した。
【0059】
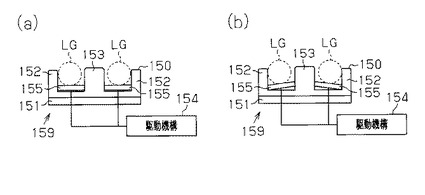
図10に示すように、脚施術部150において、使用者の脚の裏側に面する底板155が駆動機構154の駆動により変位可能である。具体的には、揺動停止時では、図10(a)に示すように、底板155が連結フレーム151に対して水平に配置される(第1の位置)。その一方で、揺動時では、図10(b)に示すように、底板155が、連結フレーム151に対して、使用者の脚の内側と面する側壁153側が使用者の脚の外側と面する側壁152側よりも高い位置となるように傾斜して配置される(第2の位置)。なお、脚施術部150自体は、連結フレーム151に対して移動しないように構成されており、各側壁152,153自体も連結フレーム151に対して移動しないように構成されている。このように、使用者の脚LGを外側に向かって傾斜させることによって、使用者の足の爪先を外側に向かせることができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、底板155及び駆動機構154が揺動間隔拡大機構159に相当する。
【0060】
(第8実施形態)
図11を参照して本発明の第8実施形態について説明する。
第8実施形態のマッサージ機では、施術用のエアバックを併用することで、各揺動領域の間隔を調整するように構成した。
【0061】
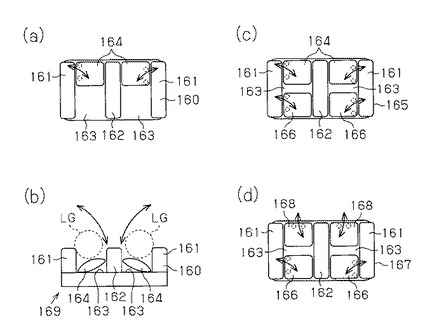
図11(a)及び図11(b)に示すように、脚施術部160において、使用者の脚の裏側に面する底面163に施術用のエアバック164が配設されている。このエアバック164は、座部の端部側に配設されており、内側の側壁162側では固定されておらず、外側の側壁161側のみで底面163に固定されている。
【0062】
このような構成において、揺動停止時では、エアバック164を収縮させることによって、使用者の脚LGが底面163に対して傾斜することなく水平に脚施術部160に保持される(第1の位置)。その一方で、揺動時では、図11(b)に示すように、エアバック164を膨張させることによって、外側の側壁161側で底面163に固定されているため、内側の側壁162側で大きく膨張することとなる。そして、使用者の脚LGが外側の側壁161側を支点として持ち上がることとなり、使用者の脚LGが底面163に対して外側に傾斜するように脚施術部160に保持される(第2の位置)。このように、使用者の脚LGを外側に向かって傾斜させることによって、使用者の足の爪先を外側に向かせることができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、エアバック164が揺動間隔拡大機構169に相当する。
【0063】
また、図11(c)に示すように、脚施術部165に、使用者の両脚毎に複数のエアバック164,166が同じように配設されていてもよい。このため、使用者の両脚毎に1つのエアバックが配設された場合よりも、使用者の脚を外側に傾斜させ易く、かつ、安定させることができ、効果的に揺動による施術を行うことができる。
【0064】
また、図11(d)に示すように、脚施術部167に、外側の側壁161側のみで底面163に固定されるエアバック166と、座部側の端面のみで底面163に固定されるエアバック168とが配設されてもよい。これにより、使用者の脚を持ち上げる負担を減少させることができるとともに、使用者の脚を外側に向かって傾斜させることによって、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。
【0065】
このように、施術用のエアバックを共用することによって、各揺動領域の調整を行うことができ、他のアクチュエータを別途設ける必要がなく、軽量化を図ることもできる。また、例えば、施術用のエアバックとは共用せずに、別途エアバックを用いた場合であっても、施術用のエアバックでも用いるポンプを共用することができる。これにより、例えばモータ等の他のアクチュエータに比べても、容易に制御することができるとともに、装置の小型化を図ることができる。
【0066】
(第9実施形態)
図12を参照して本発明の第9実施形態について説明する。
第9実施形態のマッサージ機では、複数のエアバックを重ねて用いることによって各揺動領域の間隔を調整するように構成した。
【0067】
図12(a)及び図12(b)に示すように、脚施術部170は、その底面173に2つの施術用のエアバック174,175が垂直方向に重ねて配設されている。使用者の脚LG側に位置するエアバック174は、膨張することによって、使用者の脚LGを支持するとともに施術を行うものであり、使用者の脚の外側に面する側壁171側から内側に面する側壁172側まで、底面173を覆うように配設されている。このエアバック174は、内側の側壁172側では底面173に固定されておらず、外側の側壁171側で底面173に固定されている。また、エアバック174は、内側の側壁172側で、底面173側に位置するエアバック175と重なって配設されている。その一方で、底面173側に位置するエアバック175は、使用者の脚に沿って延伸する形状であり、外側の側壁171側には配設されておらず、内側の側壁172側だけに配設されるように底面173に固定されている。
【0068】
このような構成において、揺動停止時では、エアバック174,175を収縮させることによって、使用者の脚LGが底面173に対して傾斜することなく水平に脚施術部170に保持される(第1の位置)。その一方で、揺動時では、図12(b)に示すように、エアバック174,175の両方を膨張させることによって、エアバック174が外側の側壁171側で底面173に固定されているため、内側の側壁172側で大きく膨張することとなる。また、内側の側壁172側のみに配設されたエアバック175の膨張により、エアバック174は、外側の側壁171側を支点として内側の側壁172側が更に持ち上がる(第2の位置)。このため、使用者の脚LGが底面173に対して外側に傾斜するように脚施術部170に保持される。このように、使用者の脚LGを外側に向かって傾斜させることによって、使用者の足の爪先を外側に向かせることができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、エアバック174,175が揺動間隔拡大機構179に相当する。
【0069】
また、図12(c)に示すように、脚施術部176において、重ねて配設される複数のエアバック177,178が、外側の側壁171側で底面173に固定されるように構成してもよい。なお、本実施形態において、エアバック177,178が揺動間隔拡大機構179’に相当する。
【0070】
(第10実施形態)
図13を参照して本発明の第10実施形態について説明する。
第10実施形態のマッサージ機では、揺動時では、使用者の両脚の高さを異ならせることによって、各揺動領域の間隔を調整するように構成した。
【0071】
図13(a)に示すように、脚施術部180には、使用者の脚LGを裏側に面する底板181L,181Rが配設されており、駆動機構182の駆動により底面183に対して垂直方向に変位可能であり、これによって、使用者の脚LGを持ち上げることができる。特に、本実施形態では、揺動停止時では、底板181L,181Rの両方が低い位置に配置される(第1の位置)。その一方で、揺動時では、図13(a)に示すように、一方の底板181Rのみが高い位置に配置され、他方の底板181Lが低い位置に配置される(第2の位置)。このため、揺動時では、使用者の脚の一方のみが持ち上げられ、他方との高さが異なることとなり、図13(b)に示すように、使用者の足FTの高さを異ならせることができる。これによって、使用者の足FTが揺動された場合であっても、各揺動領域をずらすことができるとともに、各揺動領域の間隔を拡大することができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。また、両方の脚の高さが異なるため、両方の脚の高さが同じである場合とは揺動感を異ならせることができる。なお、本実施形態において、底板181L,181R及び駆動機構182が揺動間隔拡大機構189に相当する。
【0072】
(第11実施形態)
図14を参照して本発明の第11実施形態について説明する。
第11実施形態のマッサージ機では、外側の側壁を変位させることによって、各揺動領域の間隔を調整するように構成した。
【0073】
図14に示すように、脚施術部190において、駆動機構194の駆動により、座部側の端部における回動軸191aを中心に外側の側壁191が回動可能である。また、内側の側壁192には、座部側の端部にエアバック193が配設されている。
【0074】
この構成において、揺動停止時では、エアバック193を収縮させるとともに、外側の側壁191が回動せずに使用者の脚に沿って延伸するように配置される。その一方で、揺動時では、エアバック193を膨張させるとともに、外側の側壁191が回動して、使用者の脚を外側に伸びるように傾斜して配置される。これによって、使用者の両脚の間隔及び使用者の両足の間隔が開き、両足の揺動領域の間隔を拡大することができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、側壁191、エアバック193及び駆動機構194が揺動間隔拡大機構199に相当する。
【0075】
(第12実施形態)
図15を参照して、本発明の第12実施形態について説明する。
第12実施形態のマッサージ機では、座部に対するオットマンの角度によって、揺動時では、脚施術部及び足施術部のうち少なくともいずれか一方が異なる配置となるように構成とした。
【0076】
図10に示す第7実施形態に本実施形態を追加した場合の一例とする。図15(a)に示すように、脚施術部150が鉛直方向に対して小さい角度で傾斜している場合には、使用者の足FTが下方に向かうように使用者の脚LGが脚施術部150に保持される。その一方で、図15(e)に示すように、脚施術部150が鉛直方向に対して大きい角度で傾斜している場合には、使用者の足FTが前方に向かうように使用者の脚LGが脚施術部150に保持される。
【0077】
図15(f)に示すように、脚施術部150が大きい角度で傾斜している場合には、図15(b)に示すように、脚施術部150が小さい角度で傾斜している場合よりも、爪先が接触し易くなる傾向があるためである。これは、使用者の膝が伸展することで脚LGが内旋し、使用者の足FTが内側に向くからである。このため、脚施術部150が大きい角度で傾斜している場合には、脚施術部150が小さい角度で傾斜している場合よりも、両足の揺動領域の間隔が拡大するように調整される。
【0078】
制御装置61は、脚施術部150(オットマン12)が傾斜すると、その傾斜角度を記憶する。そして、揺動時では、制御装置61は、記憶した傾斜角度が予め定められた規定角度よりも大きいか否かにより、図15(c)及び図15(g)に示すように、内側の側壁153側の底板155の高さを駆動機構154の駆動により変化させる。
【0079】
具体的には、揺動時では、制御装置61は、脚施術部150が規定角度よりも小さい角度で傾斜している場合、図15(c)に示すように、幅方向に対して外側の側壁152側よりも内側の側壁153側のほうが高くなるように底板155を変位させる。その一方で、制御装置61は、脚施術部150が規定角度よりも大きい角度で傾斜している場合、図15(g)に示すように、規定角度よりも小さい角度で傾斜している場合よりも、内側の側壁153側が高くなるように底板155を変位させる。なお、制御装置61は、脚施術部150の傾斜角度や揺動時であるか揺動停止時であるか否かに拘わらず、外側の側壁152側では、同じように底板155を高さ方向に変位させない。このため、制御装置61は、揺動時では脚施術部150が規定角度よりも大きい角度で傾斜している場合、小さい角度で傾斜している場合よりも大きく、前後方向を回動軸として幅方向に対して外側に底板155を傾斜させることとなる。
【0080】
したがって、揺動時では脚施術部150の傾斜角度が小さければ、図15(c)に示すように、小さい角度で底板155を傾斜させ、脚施術部150の傾斜角度が大きければ、図15(g)に示すように、大きい角度で底板155を傾斜させる。つまり、制御装置61は、幅方向を回動軸とする脚施術部150の傾斜角度を入力パラメータとして、その入力パラメータに応じて、例えば角度や長さ等の変更量を制御することとなる。これによって、図15(d)及び図15(h)に示すように、脚施術部150の傾斜角度に拘わらず、各揺動領域の間隔を拡大するように調整することができる。
【0081】
このように、脚施術部150(オットマン)の角度に応じて第1揺動領域と第2揺動領域との間隔を変化させる。特に、脚施術部150の角度が高くなるにつれて、両足の間隔が狭くなる傾向があるため、鉛直方向に対する脚施術部150の角度が大きくなると、第1揺動領域と第2揺動領域との間隔を拡大するように変化させる。これによって、使用者の両方の足FTを接触させ難くすることができ、効果的に揺動を伝えることができる。
【0082】
(第13実施形態)
図16を参照して本発明の第13実施形態について説明する。
第13実施形態のマッサージ機では、揺動停止時であるか揺動時ではないかに拘わらず、脚施術部の全体や一部を変位させることによって、各揺動領域の間隔を調整するように構成した。
【0083】
図16(a)に示すように、脚施術部200において、使用者の脚が保持される底板203が、別体で形成されており、底面から突出する支持部材204に、使用者の脚に沿う回動軸203aを中心に回動可能に軸着されている。この支持部材204は、外側の側壁201と内側の側壁202との中心に配置されている。そして、底板203の下方から弾性力が加えられる弾性部材205〜208が、それぞれ外側の側壁201側と内側の側壁202側との両方に配設されている。なお、本実施形態において、弾性部材としては圧縮コイルばねを用いる。これらの弾性部材205〜208のうち、内側の側壁202側に配設された弾性部材206,207のほうが、外側の側壁201側に配設された弾性部材205,208よりもそれぞればね定数が大きく、大きな弾性力が加えられる。このため、底板203は、外側の側壁201側よりも、内側の側壁202側のほうが高くなり、外側に面するように傾斜することとなる。このように、揺動停止時であるか揺動時であるかに拘わらず、使用者の脚を外側に向かって傾斜させることによって、使用者の足の爪先を外側に向かせることができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。
【0084】
特に、底板203に使用者の脚を保持すると、揺動時では、使用者の脚が左右に移動することもある。そして、内側の側壁202側に配設された弾性部材206,207のほうが、外側の側壁201側に配設された弾性部材205,208よりも弾性力が大きい。このため、外側揺動幅よりも内側揺動幅のほうが小さくなり、両足の揺動領域の間隔が拡大されることとなる。このように、使用者の脚が内側に揺動し難くさせることによって、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。また、左右の脚で高さを異ならせるようにばね定数を左右で異ならせてもよい。なお、本実施形態において、底板203及び弾性部材205〜208が揺動間隔拡大機構209に相当する。また、図16(b)に示すように、脚施術部210において、外側の側壁201側における回転軸213aを中心に回動可能な底板213が配設され、内側の側壁202側にだけ弾性部材214,215を配設するように構成してもよい。なお、本実施形態において、底板213及び弾性部材214,215が揺動間隔拡大機構219に相当する。
【0085】
(第14実施形態)
図17を参照して、本発明の第14実施形態について説明する。
第14実施形態のマッサージ機では、揺動時と揺動停止時とで揺動領域が同じであるが、脚施術部全体やその側壁や底面が傾斜することによって、傾斜しない場合よりも第1揺動領域と第2揺動領域との間隔を拡大するように調整する構成とした。
【0086】
図17(a)に示すように、脚施術部220において、底面223が傾斜して形成されており、外側の側壁221よりも内側の側壁222のほうが高い位置となる。このため、揺動機構により脚施術部220が幅方向に揺動された場合、使用者の脚が幅方向に開き、使用者の両足間が広がり、両足の爪先が揺動により接触しない距離に使用者の足が保持される。つまり、脚施術部220における底面223が外側に傾斜するように形成されることで、外側揺動幅よりも内側揺動幅のほうが小さくなり、揺動時では両足の揺動領域の間隔が、底面が平面又は内側に傾斜する場合よりも拡大される。これによって、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。このように、脚施術部220の底面223を脚施術部220に対して傾斜させて形成することによって、第1揺動領域と第2揺動領域との間隔を拡大させることができる。したがって、他のアクチュエータを別途設ける必要がなく、軽量化を図ることもできるとともに、例えば揺動速度及び揺動幅の範囲等の制御量を大きくすることができ、効果的な揺動感を提供することができる。なお、本実施形態において、外側に傾斜する底面223が揺動間隔拡大機構229に相当する。もちろん、内側の側壁が幅方向に向かって外側に傾斜するような形状であってもよく、これらの組み合わせであってもよい。
【0087】
また、図17(b)に示すように、揺動時と揺動停止時とで同じように、常時、脚施術部230自体が前後方向(使用者の矢状面でもある)に対して幅方向に傾斜するように構成してもよい。これにより、側壁231,232が前後方向に対して幅方向に傾斜するように配置される。このように、脚施術部230自体を幅方向に対して外側に傾斜させて配置することによって、第1揺動領域と第2揺動領域との間隔を拡大させることができる。したがって、他のアクチュエータを別途設ける必要がなく、軽量化を図ることもできるとともに、例えば揺動速度及び揺動幅の範囲等の制御量を大きくすることができ、効果的な揺動感を提供することができる。なお、本実施形態において、脚施術部220において幅方向に傾斜する側壁231,232が揺動間隔拡大機構239に相当する。
【0088】
なお、本実施形態は以下のような別の実施形態に変更してもよい。
・第12実施形態では、脚施術部150が規定角度よりも大きいか小さいかの2段階毎に、揺動領域を変化させるように構成したが、これに限らず、3段階以上毎に、揺動領域を変化させるように構成してもよい。つまり、脚施術部150の傾斜角度に連動して、揺動間隔拡大機構が動作すればよい。
【0089】
・第12実施形態では、脚施術部150の傾斜角度に応じて、揺動領域を調整したが、これに限らず、例えば、揺動強度や揺動速度に応じて、揺動領域を調整してもよい。また、これらの組み合わせであってもよい。
【0090】
・第1〜第12実施形態では、制御装置の制御により、脚施術部及び足施術部の少なくともいずれか一方の全体又は一部を変位させる構成であったが、これに限らず、例えば、使用者の操作により手動で変位させる構成であってもよい。
【0091】
・第1〜第13実施形態では、それぞれ、脚施術部のみ、足施術部のみ、脚施術部及び足施術部を変位させるように構成したが、これに限らず、脚施術部及び足施術部の少なくともいずれか一方であればよい。
【0092】
・上記実施形態では、各施術部には、側壁と底面(又は底板)が形成されたが、これに限らず、例えば、側壁の一方又は両方が形成されなくてもよい。
・上記実施形態では、脚施術部及び足施術部の両方が連動して傾斜するように構成したが、これに限らず、脚施術部のみが傾斜し、足施術部が傾斜せずに下方に配設されるように構成してもよい。
【0093】
・上記実施形態では、座部13、背もたれ部14及び肘掛部15に、使用者を施術する各種機構を備えた構成としたが、これに限らず、いずれかを備えない構成であってもよい。
【0094】
・上記実施形態では、脚施術部及び足施術部の両方で使用者の脚や足を施術するように構成したが、これに限らず、いずれか一方で施術するように構成してもよい。例えば、使用者の脚を施術しない構成であったり、使用者の足を施術しない構成であったりしてもよい。また、揺動機構16の揺動以外に、エアバック等により使用者の脚を施術しなくてもよく、揺動機構16による揺動が伝達される脚施術部及び足施術部の少なくともいずれか一方が配設されればよい。
【0095】
次に、上記実施形態及び別例から把握できる技術的思想を以下に追記する。
(イ) 前記脚保持部及び前記足保持部のうち少なくともいずれか一方には、前記揺動機構による揺動とは別で、使用者の脚及び足のうち少なくともいずれか一方を施術する施術機構が設けられたことを特徴とする請求項1〜請求項8のうちいずれか一項に記載の脚揺動装置。
【0096】
(ロ) 前記揺動間隔拡大機構は、前記脚保持部及び前記足保持部のうち少なくともいずれか一方において、膨張収縮駆動させることにより使用者の脚及び足のうち少なくとも一方を施術するエアバックを用いて構成されることを特徴とする請求項1〜請求項4のうちいずれか一項に記載の脚揺動装置。
【符号の説明】
【0097】
10…マッサージ機、11…マッサージ椅子本体、12…オットマン、13…座部、16…揺動機構、20,120…足施術部、30,100,110,130,140,150,160,165,167,170,176,180,190,200,210,220,230…脚施術部、49,109,119,139,149,159,169,179,179’,189,199,209,219,229,239…揺動間隔拡大機構、R1…第1揺動領域、R2…第2揺動領域。
【技術分野】
【0001】
本発明は、使用者の脚を揺動させる揺動機構を備えた脚揺動装置及びマッサージ機に係り、詳しくは、使用者の脚を保持する脚保持部と、使用者の足を保持する足保持部とのうち少なくともいずれか一方を備えた脚揺動装置及びマッサージ機に関する。
【背景技術】
【0002】
従来のマッサージ機には、特許文献1に示すように、使用者の脚を支持するオットマンと、使用者の臀部を支持する座部と、使用者の背中を支持する背もたれと、使用者の脚を揺動させる揺動機構とが設けられている。このマッサージ機において揺動機構により使用者の脚が揺動させられたときには、それに伴って足にも揺動が伝達され、足が左右に振れる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−237295号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、このようなマッサージ機において、効果的な施術を行うためにも、脚や足の揺動量を大きくすることが望ましいが、揺動機構により使用者の脚を揺動させる際に、使用者の足が左右に振れて、その両足が接触するおそれがあった。
【0005】
本発明は、このような事情に鑑みてなされたものである。その目的は、使用者の脚を揺動させた場合であっても、使用者の両足を接触させ難くすることができ、効果的に揺動を伝えることができる脚揺動装置及びマッサージ機を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の脚揺動装置は、使用者の脚を保持する脚保持部と、使用者の足を保持する足保持部とのうち少なくともいずれか一方を備え、使用者の脚を揺動させることで施術する揺動機構を備えた脚揺動装置において、前記脚保持部及び前記足保持部のうち少なくともいずれか一方には、前記揺動機構によって使用者の脚を揺動させる場合に、使用者の一方の足が揺動することが許可される第1揺動領域と、使用者の他方の足が揺動することが許可される第2揺動領域との間隔を拡大させる揺動間隔拡大機構が設けられたことを要旨とする。
【0007】
本発明の脚揺動装置において、前記揺動間隔拡大機構は、前記揺動機構による揺動が行われているときには、前記揺動機構による揺動が行われる前よりも、前記第1揺動領域と前記第2揺動領域との間隔を拡大させることが好ましい。
【0008】
本発明の脚揺動装置において、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に、底面及び側壁が設けられ、前記揺動間隔拡大機構は、前記底面及び前記側壁のうち少なくともいずれか一方を、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように変位させることが好ましい。
【0009】
本発明の脚揺動装置において、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に、底面及び側壁が設けられ、前記揺動間隔拡大機構は、前記底面及び前記側壁が設けられた前記脚保持部及び前記足保持部のうち少なくともいずれか一方を、該底面及び該側壁を一体として、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように変位させることが好ましい。
【0010】
本発明の脚揺動装置において、前記揺動間隔拡大機構は、膨張収縮駆動させるエアバックを用いて構成されることが好ましい。
本発明の脚揺動装置において、前記揺動間隔拡大機構は、使用者の足の内側方向に対する揺動幅を、外側方向に対する揺動幅よりも小さくすることで、前記第1揺動領域と前記第2揺動領域との間隔を拡大させることが好ましい。
【0011】
本発明の脚揺動装置において、前記揺動間隔拡大機構は、前記脚揺動装置の角度に応じて前記第1揺動領域と前記第2揺動領域との間隔を変化させることが好ましい。
本発明の脚揺動装置において、前記揺動間隔拡大機構は、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に設けられた底面及び側壁を含む構成であり、前記底面及び前記側壁のうち少なくともいずれか一方は、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に対して傾斜して形成されていることが好ましい。
【0012】
本発明のマッサージ機において、臀部を支持する座部と背中を支持する背もたれとを備えたマッサージ機において、前記脚揺動装置を備えたことを要旨とする。
【発明の効果】
【0013】
本発明によれば、揺動機構により使用者の脚を揺動させた場合であっても、使用者の両足を接触させ難くすることができ、効果的に揺動を伝えることができる。
【図面の簡単な説明】
【0014】
【図1】第1実施形態におけるマッサージ機の概略構成を説明するための側面図である。
【図2】第1実施形態におけるオットマンの概略構成を説明するための正面図である。
【図3】第1実施形態におけるオットマンについて、(a)、(c)、(f)及び(h)は概略構成を説明するための正面図であり、(b)は(a)のA−A線の断面構造を示す断面図であり、(g)は(f)のB−B線の断面構造を示す断面図であり、(d)及び(i)は使用者の脚を示す説明図であり、(e)及び(j)は使用者の脚を示す説明図である。
【図4】第1実施形態におけるマッサージ機の制御構成を示すブロック図。
【図5】(a)及び(c)は、第2実施形態におけるオットマンの概略構成を説明するための正面図であり、(b)は、(a)のC−C線の断面構造を示す断面図であり、(d)は、(c)のD−D線の断面構造を示す断面図である。
【図6】(a)及び(b)は、第3実施形態におけるオットマンの概略構成を説明するための正面図である。
【図7】(a)及び(b)は、第4実施形態における足施術部を示す底面図である。
【図8】(a)及び(b)は、第5実施形態における脚施術部を示す断面図であり、(c)は使用者の足を示す説明図である。
【図9】(a)及び(b)は、第6実施形態における脚施術部を示す断面図である。
【図10】(a)及び(b)は、第7実施形態における脚施術部を示す断面図である。
【図11】は、第8実施形態における脚施術部について、(a)、(c)及び(d)は正面図であり、(b)は断面図である。
【図12】第9実施形態における脚施術部について、(a)は正面図であり、(b)及び(c)は断面図である。
【図13】(a)は、第10実施形態における脚施術部を示す断面図であり、(b)は使用者の足を示す説明図である。
【図14】第11実施形態における脚施術部を示す正面図である。
【図15】第12実施形態におけるオットマンついて、(a)及び(e)は側面図であり、(b)、(d)、(f)及び(h)は説明図であり、(c)及び(g)は断面図である。
【図16】(a)及び(b)は、第13実施形態における脚施術部を示す断面図である。
【図17】第14実施形態における脚施術部について、(a)は断面図であり、(b)は正面図である。
【発明を実施するための形態】
【0015】
(第1実施形態)
以下、本発明を具体化した椅子型のマッサージ機(以下、単に「マッサージ機」という。)を示す第1実施形態を図1〜図4に従って説明する。なお、以下における本明細書中の説明において、「前後方向」とはマッサージ機に着座した使用者を基準とした方向に該当する方向である。また、「幅方向」とは使用者の左右方向に該当する方向であり、「上下方向」とはマッサージ機が設置される設置面と直交する方向に該当する方向であるものとする。
【0016】
図1に示すように、本実施形態のマッサージ機10は、使用者の体幹を保持するためのマッサージ椅子本体11と、使用者の脚を保持するためのオットマン12とから構成されている。
【0017】
マッサージ椅子本体11には、使用者の臀部を支持する座部13と、使用者の背中を支持する背もたれ部14と、使用者の腕を支持する一対の肘掛部15とが設けられている。また、この背もたれ部14は、幅方向を中心軸として回動可能であり、矢印Aに示すように、座部13に対する傾斜を変更させることができる。
【0018】
オットマン12は、マッサージ椅子本体11の座部13の前端に延設してなり、幅方向を中心軸として座部13に対して回動可能であり、矢印Bに示すように、座部13に対する傾斜を変更させることができる。このオットマン12は、使用者の足を施術するための足施術部20と、使用者の脚(特に下腿部)を施術するための脚施術部30と、を含むように構成されている。また、このオットマン12は、リンク部材17により支持され、使用者の脚及び足を揺動させる揺動機構16を含むように構成されている。揺動機構16は、脚施術部30において使用者の脚が保持される面の裏面から配設されており、脚施術部30を幅方向に揺動させることで、脚施術部30に保持されている使用者の脚及び足を幅方向に揺動させる。つまり、本実施形態におけるオットマン12は、使用者の脚を揺動させる脚揺動装置として機能する。また、ここでの「脚」は足首から元の部分を意味し、「足」は足首から先の部分を意味し、特に、ここでの「下腿部」は膝から足首までの部分を意味する。また、以下、揺動機構16による揺動が行われているときを単に「揺動時」と示し、揺動機構16による揺動が行われていないときを単に「揺動停止時」と示す。
【0019】
図2を参照して、足施術部20及び脚施術部30の構成について説明する。
図2に示すように、足施術部20において、使用者の足を保持するための保持面21には、使用者の両足を両側方から覆う側壁22が形成されており、その側壁22には、膨張収縮駆動させるエアバック23が埋設されている。また、保持面21には、使用者の両足裏と面する底面24が形成されており、その底面24にも、エアバック25が埋設されている。これらエアバック23,25の駆動により、揺動機構16による揺動とは別で、使用者の足を施術することとなる。なお、本実施形態において、この足施術部20が足保持部に相当する。
【0020】
脚施術部30において、使用者の脚を保持するための保持面31には、使用者の両脚を両側方から覆う側壁32が形成されており、その側壁32には、膨張収縮駆動させるエアバック33が埋設されている。また、保持面31には、使用者の両脚を脚裏側と面する底面34が形成されており、その底面34にも、エアバック35が埋設されている。これらエアバック33,35の駆動により、揺動機構16による揺動とは別で、使用者の脚を施術することとなる。なお、本実施形態において、この脚施術部30が脚保持部に相当する。
【0021】
また、本実施形態においては、足施術部20及び脚施術部30は、それぞれ使用者の左右の脚毎に別体に形成されているが、同じ方の脚や足を保持する足施術部20及び脚施術部30はそれぞれ連結されている。また、足施術部20及び脚施術部30は、揺動時であるか否かによって変位することとなる。
【0022】
図3を参照して、足施術部20及び脚施術部30を変位させる構成について説明する。
オットマン12における足施術部20及び脚施術部30は、揺動停止時では、図3(a)に示すように、幅方向に対して略垂直方向に並設されている。なお、本実施形態において、このように足施術部20及び脚施術部30が配置された位置を、揺動停止時における第1の位置と示す。
【0023】
その一方で、足施術部20及び脚施術部30は、揺動時では、図3(f)に示すように、略垂直方向よりも前後方向を中心軸として所定角度だけ回動した位置に並設される。なお、本実施形態において、このように足施術部20及び脚施術部30が配置された位置を、揺動されている場合における第2の位置と示す。
【0024】
この脚施術部30の保持面31の裏側には、図3(b)及び図3(c)に示すように、足施術部20及び脚施術部30を変位させる揺動間隔拡大機構49が配設されている。揺動間隔拡大機構49は、連結フレーム71と、幅方向に変位可能な可動部材72と、可動部材72の変位を導くガイド部73と、可動部材72を変位させるエアバック74と、可動部材72に弾性力を加える弾性部材75とを含む構成である。
【0025】
連結フレーム71は、その底面で揺動機構16と当接するとともに、その上面で一対の可動部材72を支持し、揺動機構16からの揺動を可動部材72に伝達する。可動部材72は、連結フレーム71に対して回動軸72aを中心に回動自在に軸着されており、幅方向に変位可能となる。また、この可動部材72は、使用者の両脚毎に配設されている一対の脚施術部30を支持し、可動部材72から伝達された揺動機構16からの揺動を脚施術部30に伝達する。ガイド部73は、連結フレーム71に沿って幅方向に変位するように可動部材72を導く。
【0026】
膨張収縮駆動させるエアバック74は、その駆動により、可動部材72を幅方向に変位させる。特に、揺動時では、エアバック74は、図3(g)及び図3(h)に示すように、可動部材72を幅方向に沿って外側に膨張することで回動軸72aを中心に回動させる。これによって、エアバック74は、可動部材72により支持されている脚施術部30を、連結されている足施術部20とともに、前後方向を回動軸として外側に傾斜させることとなる(第2の位置)。
【0027】
弾性部材75は、本実施形態においては引っ張りばねであり、エアバック74が膨張した状態から収縮した状態となった場合に、可動部材72を幅方向に向かって内側に回動させる。これによって、弾性部材75は、可動部材72により支持されている脚施術部30を、連結されている足施術部20とともに、前後方向を回動軸として内側に傾斜させることとなる(第1の位置)。
【0028】
図4を参照して、マッサージ機10の制御機構について説明する。
マッサージ機10において、座部13には、エアバック51の膨張及び収縮を制御する臀部施術機構41が設けられている。背もたれ部14には、エアバック52の膨張及び収縮を制御する背中施術機構42が設けられている。また、背もたれ部14には、揉み玉等のアクチュエータ56を駆動制御する揉み玉機構46と、座部13に対する傾斜を変更させるための第1モータ57を駆動制御する第1角度調整機構47と、が設けられている。肘掛部15には、エアバック53の膨張及び収縮を制御する腕施術機構43が設けられている。
【0029】
オットマン12の足施術部20には、エアバック23,25の膨張及び収縮を制御する足施術機構44が設けられている。オットマン12の脚施術部30には、エアバック33,35の膨張及び収縮を制御する脚施術機構45が設けられている。オットマン12には、座部13に対する傾斜を変更させるための第2モータ58を駆動制御する第2角度調整機構48が設けられている。
【0030】
特に、オットマン12には、揺動モータ59の駆動により脚施術部30を幅方向に揺動させるための揺動機構16が設けられている。また、オットマン12には、エアバック74の膨張及び収縮を制御することで、揺動機構16により揺動される使用者の脚や足の揺動領域を調整するための揺動間隔拡大機構49が設けられている。
【0031】
各施術機構41〜45には、対応するエアバック23,25,33,35,51〜53,74にエアを供給するためのエアポンプと、エアポンプから対応するエアバックへのエアの供給量を調整するための電磁弁とが設けられている(いずれも図示略)。
【0032】
マッサージ機10には、オットマン12、座部13、背もたれ部14及び肘掛部15の各機構の制御を行う制御装置61と、使用者により各機構を操作するためのコントローラ62と、が設けられている。また、マッサージ機10には、電源部63が設けられており、制御装置61、コントローラ62及び各機構に電力を供給する。なお、図4においては、電力の供給を示す線を省略して表している。制御装置61は、各施術機構41〜45、揉み玉機構46、第1角度調整機構47、第2角度調整機構48、オットマン12の揺動機構16及び揺動間隔拡大機構49のそれぞれの制御を行う。
【0033】
(実施形態の作用)
次に、図3を参照して、本実施形態の作用について説明する。なお、図3(e)においては、揺動されていない場合における使用者の足FTを実線で、その使用者の足の中心を一点鎖線でそれぞれ示す。また、両足の揺動領域が重なり、使用者の足が視認し易くなるため、仮に揺動機構16による揺動が行われた場合における使用者の足や各揺動領域を示さずに、使用者の足の中心のみを二点鎖線で示す。また、図3(j)においては、最も内側に揺動する場合における使用者の足及びその中心を実線で示し、最も外側に揺動する場合における使用者の足及びその中心を二点鎖線で示す。また、揺動されていない場合における使用者の足の中心を一点鎖線で示す。また、使用者の足の一方が揺動する揺動領域を第1揺動領域R1として、他方が揺動する揺動領域を第2揺動領域R2として、それぞれ破線で示す。
【0034】
まず、揺動機構16の動作が停止している場合、図3(b)及び図3(c)に示すように、揺動間隔拡大機構49によりエアバック74が収縮されており、可動部材72が弾性部材75の弾性力により幅方向に対して内側に配置されている。このため、足施術部20及び脚施術部30は、図3(a)に示すように、第1の位置に配置されている。このように足施術部20及び脚施術部30が第1の位置に配置されることで、図3(d)に示すように、使用者の脚LG及び足FTを幅方向に対して外側に開きにくくなる。そして、図3(e)に示すように、両足の爪先が揺動により接触する距離に使用者の足FTが保持される。つまり、足施術部20及び脚施術部30が第1の位置に配置されたまま、仮に揺動機構16による揺動が行われた場合には、両足の揺動領域(第1揺動領域と第2揺動領域と)が重なり、両足の爪先が揺動により接触することとなる。
【0035】
そして、制御装置61は、コントローラ62から揺動機構16の動作を実行する旨の信号を受信したとき、図3(g)及び図3(h)に示すように、揺動間隔拡大機構49にエアバック74を膨張させる。これによって、弾性部材75の弾性力に対抗して、回動軸72aを中心として可動部材72を幅方向に対して外側に回動させ、図3(f)に示すように、足施術部20及び脚施術部30を第1の位置から第2の位置に移動させる。
【0036】
その後、制御装置61は、揺動機構16により揺動モータ59を揺動させることで、連結フレーム71を揺動させ、更に可動部材72を介して、足施術部20及び脚施術部30を揺動させる。このように足施術部20及び脚施術部30が第2の位置に配置されることで、図3(i)に示すように、使用者の脚LG及び足FTを幅方向に対して外側に開く。そして、図3(j)に示すように、使用者の両足間が広がり、両足の爪先が揺動により接触しない距離に使用者の足FTが保持される。つまり、足施術部20及び脚施術部30が第2の位置に配置されることで、揺動機構16による揺動が行われた場合には、両足の揺動領域(第1揺動領域R1と第2揺動領域R2と)の間隔が第1の位置よりも拡大される。これによって、両足の揺動領域が重ならずに、両足の爪先が揺動により接触しないこととなる。また、このような構成において、使用者の足FTが内側に揺動する内側揺動幅と、外側に揺動する外側揺動幅とが略均等となっている。
【0037】
続いて、制御装置61は、コントローラ62から揺動機構16の動作を停止する旨の信号を受信したとき、揺動機構16による揺動を停止させる。そして、制御装置61は、図3(a)に示すように、揺動間隔拡大機構49に足施術部20及び脚施術部30を第2の位置から第1の位置に移動させる。具体的には、制御装置61は、図3(b)及び図(c)に示すように、揺動間隔拡大機構49にエアバック74を収縮させることで、弾性部材75の弾性力により、回動軸72aを中心として可動部材72を幅方向に対して内側に回動させる。そして、図3(a)に示すように、足施術部20及び脚施術部30を第2の位置から第1の位置に移動させる。
【0038】
また、本実施形態において、制御装置61は、コントローラ62から揺動機構16の揺動量を変更する旨の信号を受信したとき、揺動機構16の揺動量を変更する。また、制御装置61は、コントローラ62から揺動機構16の揺動速度を変更する旨の信号を受信したとき、揺動機構16の揺動速度を変更する。なお、他の機構についても上記と同様に、コントローラ62から制御装置61に送信される信号に応じて制御が行われる。例えば、制御装置61は、コントローラ62からオットマン12を所定角度に傾斜させる旨の信号を受信したとき、第2角度調整機構48により第2モータ58を駆動させ、オットマン12を所定角度に傾斜させる。そして、オットマン12が傾斜すると、制御装置61は、オットマン12の傾斜角度を記憶する。
【0039】
(実施形態の効果)
本実施形態では、以下に示す効果を得ることができる。
(1)揺動機構16により使用者の脚を揺動させた場合であっても、揺動間隔拡大機構49により第1揺動領域R1と第2揺動領域R2との間隔を拡大させるように調整することで、使用者の両足を接触させ難くすることができ、効果的に揺動を伝えることができる。
【0040】
(2)使用者の脚が揺動されているときには、揺動される前よりも、第1揺動領域R1と第2揺動領域R2との間隔を拡大させる。このため、揺動される前においては、揺動されているときにおける構成と拘わらず、他の施術を効果的に行うことができる。その一方で、揺動されているときには、揺動間隔拡大機構49により使用者の両足を接触させ難くすることができ、効果的に揺動を伝えることができる。
【0041】
(3)脚施術部30自体を変位させるため、側壁32及び底面34を一体として、脚施術部30全体を動作させることができ、変位に対する違和感を使用者に与え難くすることができる。
【0042】
(4)揺動機構16による揺動と、それを除いた他の施術装置(例えば、臀部施術機構41、背中施術機構42、腕施術機構43、揉み玉機構46など)による施術とを組み合わせることによって、様々な施術を効果的に行うことができる。
【0043】
(第2実施形態)
図5を参照して本発明の第2実施形態について説明する。
本実施形態のマッサージ機は、上記実施形態のマッサージ機の一部を変更したものとして構成されている。このため、以下では上記実施形態のマッサージ機と異なる点の詳細を説明し、同実施形態と共通する構成については同一の符号を付してその説明の一部または全部を省略する。また、第3実施形態以降においても同じように、共通する構成については同一の符号を付してその説明の一部または全部を省略する。
【0044】
第2実施形態のマッサージ機では、足施術部20と脚施術部30とを回動させずに、幅方向に移動するように構成した。
図5に示すように、脚施術部100は、両方の脚をそれぞれ別体で保持するとともに、それらの間にはエアバック101が配設されている。図5(b)に示すように、揺動機構16の上方には、可動部材102が配設されている。可動部材102は、ガイド103を介して揺動機構16による揺動を脚施術部100に伝達させるとともに、ガイド103に沿って脚施術部100を幅方向に移動させる機能を有する。ストッパ104は、脚施術部100の移動方向に配設されており、脚施術部100の移動を停止させる。
【0045】
揺動停止時では、図5(a)及び図5(b)に示すように、エアバック101が収縮しており、脚施術部100が幅方向に対して内側に配置されている(第1の位置)。その一方で、揺動時では、図5(c)及び図5(d)に示すように、エアバック101が膨張することによって、脚施術部100が幅方向に対して外側に移動する(第2の位置)。このため、脚施術部100を幅方向に対して外側に移動させることができる。これによって、使用者の両脚の間隔及び使用者の両足の間隔が開き、揺動時では両足の揺動領域の間隔を拡大することができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、エアバック101及び可動部材102が揺動間隔拡大機構109に相当する。
【0046】
(第3実施形態)
図6を参照して本発明の第3実施形態について説明する。
第3実施形態のマッサージ機では、足施術部にエアバックを用いずに他の駆動機構を用いて変位させるように構成した。
【0047】
例えば、図6に示すように、脚施術部110は、空気圧シリンダ113を幅方向に伸縮させる駆動機構112を備えてもよい。連結フレーム111に支持された脚施術部110は、両方の足をそれぞれ別体で保持し、それぞれの間には空気圧シリンダ113が配設されている。揺動停止時では、図6(a)に示すように、空気圧シリンダ113が収縮することによって、脚施術部110が幅方向に対して内側に配設される(第1の位置)。その一方で、揺動時では、図6(b)に示すように、空気圧シリンダ113が延伸することによって、脚施術部110が幅方向に対して外側に配設される(第2の位置)。これによって、使用者の両脚の間隔及び使用者の両足の間隔が開き、揺動時では両足の揺動領域の間隔を拡大することができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、空気圧シリンダ113及び駆動機構112が揺動間隔拡大機構119に相当する。
【0048】
(第4実施形態)
図7を参照して本発明の第4実施形態について説明する。
第4実施形態のマッサージ機では、足施術部を揺動させる揺動機構を備えるように構成した。
【0049】
図5に示す第2実施形態に本実施形態を追加した場合を具体的な一例として説明する。図7に示すように、足施術部120は、両方の足をそれぞれ別体で保持し、それぞれの間には、エアバック101が配設されている。揺動停止時では、図7(a)に示すように、エアバック101が収縮しており、足施術部120が幅方向に対して内側に配置されている(第1の位置)。その一方で、揺動時では、図7(b)に示すように、エアバック101が膨張することによって、足施術部120が幅方向に対して外側に移動する(第2の位置)。これによって、脚施術部を介することなく、足施術部120を直接に揺動させることができるとともに、揺動時では両足の揺動領域の間隔を拡大することができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、エアバック101及び可動部材102が揺動間隔拡大機構109に相当する。
【0050】
(第5実施形態)
図8を参照して本発明の第5実施形態について説明する。
第5実施形態のマッサージ機では、更に使用者の足が配置される角度を変化させることによって、各揺動領域の間隔を調整するように構成した。なお、第5実施形態以降については、揺動機構16を図示せず、省略する。
【0051】
図8に示すように、脚施術部130は、両方の脚LGをそれぞれ別体で保持し、使用者の脚LGの外側に面する側壁132側の回動軸134を中心に、連結フレーム131に対して回動可能に軸着されている。揺動停止時では、図8(a)に示すように、脚施術部130は、回動軸134を中心に回動されることなく、その底面が連結フレーム131に対して水平となるように配置される(第1の位置)。このため、使用者の脚LGが側壁132,133のいずれに大きく偏ることなく脚施術部130に保持される。
【0052】
その一方で、揺動時では、図8(b)に示すように、モータ等からなる駆動機構135の駆動により、脚施術部130は、回動軸134を中心に回動され、その底面が幅方向に対して外側に向くように配置される(第2の位置)。このため、使用者の脚LGが外側の側壁132に当接するように脚施術部130に保持される。
【0053】
このように、揺動時では、脚施術部130において、使用者の両脚が離れるように変位するとともに、その底面が外側に向かうように傾斜する。これによって、図8(c)に示すように、使用者の足FTが外側に開き、爪先も外側に向き、使用者の足FTの爪先が、内側よりも外側に揺動し易くなる。つまり、脚施術部が第2の位置に配置されることで、各揺動領域R1,R2として、外側揺動幅よりも内側揺動幅のほうが小さくなり、揺動時では、両足の揺動領域の間隔が拡大される。これによって、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。
【0054】
また、側壁132,133の間隔が変化するわけではないので、使用者の両方の脚がずれにくく、使用者の脚LGや足FTなどの他の部位との組み合わせとして、効果的に施術を行うことができる。なお、本実施形態において、駆動機構135が揺動間隔拡大機構139に相当する。
【0055】
(第6実施形態)
図9を参照して本発明の第6実施形態について説明する。
第6実施形態のマッサージ機では、足施術部及び脚施術部全体を変位させないが、足施術部及び脚施術部における一部の部材を変位させるように構成した。
【0056】
図9に示すように、脚施術部140において、使用者の脚の内側に面する側壁142が駆動機構144の駆動により変位可能である。具体的には、揺動停止時では、図9(a)に示すように、内側の側壁142が内側の位置に配置される(第1の位置)。その一方で、揺動時では、図9(b)に示すように、内側の側壁142が外側に配置される(第2の位置)。なお、脚施術部140自体は、連結フレーム141に対して移動しないように構成されており、外側の側壁143自体も連結フレーム141に対して移動しないように構成されている。これによって、使用者の両脚の間隔及び使用者の両足の間隔が開き、脚施術部140を揺動させることができるとともに、揺動時では両足の揺動領域の間隔を拡大することができる。
【0057】
このように、脚施術部140全体が変位するわけではなく、脚施術部140の一部である内側の側壁142が変位するため、変位させる部材が少なく、アクチュエータの小型化を図ることができ、装置全体の小型化、軽量化を図ることができる。なお、本実施形態において、内側の側壁142及び駆動機構144が揺動間隔拡大機構149に相当する。
【0058】
(第7実施形態)
図10を参照して本発明の第7実施形態について説明する。
第7実施形態のマッサージ機では、足施術部及び脚施術部の少なくともいずれか一方における底面を変位させるように構成した。
【0059】
図10に示すように、脚施術部150において、使用者の脚の裏側に面する底板155が駆動機構154の駆動により変位可能である。具体的には、揺動停止時では、図10(a)に示すように、底板155が連結フレーム151に対して水平に配置される(第1の位置)。その一方で、揺動時では、図10(b)に示すように、底板155が、連結フレーム151に対して、使用者の脚の内側と面する側壁153側が使用者の脚の外側と面する側壁152側よりも高い位置となるように傾斜して配置される(第2の位置)。なお、脚施術部150自体は、連結フレーム151に対して移動しないように構成されており、各側壁152,153自体も連結フレーム151に対して移動しないように構成されている。このように、使用者の脚LGを外側に向かって傾斜させることによって、使用者の足の爪先を外側に向かせることができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、底板155及び駆動機構154が揺動間隔拡大機構159に相当する。
【0060】
(第8実施形態)
図11を参照して本発明の第8実施形態について説明する。
第8実施形態のマッサージ機では、施術用のエアバックを併用することで、各揺動領域の間隔を調整するように構成した。
【0061】
図11(a)及び図11(b)に示すように、脚施術部160において、使用者の脚の裏側に面する底面163に施術用のエアバック164が配設されている。このエアバック164は、座部の端部側に配設されており、内側の側壁162側では固定されておらず、外側の側壁161側のみで底面163に固定されている。
【0062】
このような構成において、揺動停止時では、エアバック164を収縮させることによって、使用者の脚LGが底面163に対して傾斜することなく水平に脚施術部160に保持される(第1の位置)。その一方で、揺動時では、図11(b)に示すように、エアバック164を膨張させることによって、外側の側壁161側で底面163に固定されているため、内側の側壁162側で大きく膨張することとなる。そして、使用者の脚LGが外側の側壁161側を支点として持ち上がることとなり、使用者の脚LGが底面163に対して外側に傾斜するように脚施術部160に保持される(第2の位置)。このように、使用者の脚LGを外側に向かって傾斜させることによって、使用者の足の爪先を外側に向かせることができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、エアバック164が揺動間隔拡大機構169に相当する。
【0063】
また、図11(c)に示すように、脚施術部165に、使用者の両脚毎に複数のエアバック164,166が同じように配設されていてもよい。このため、使用者の両脚毎に1つのエアバックが配設された場合よりも、使用者の脚を外側に傾斜させ易く、かつ、安定させることができ、効果的に揺動による施術を行うことができる。
【0064】
また、図11(d)に示すように、脚施術部167に、外側の側壁161側のみで底面163に固定されるエアバック166と、座部側の端面のみで底面163に固定されるエアバック168とが配設されてもよい。これにより、使用者の脚を持ち上げる負担を減少させることができるとともに、使用者の脚を外側に向かって傾斜させることによって、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。
【0065】
このように、施術用のエアバックを共用することによって、各揺動領域の調整を行うことができ、他のアクチュエータを別途設ける必要がなく、軽量化を図ることもできる。また、例えば、施術用のエアバックとは共用せずに、別途エアバックを用いた場合であっても、施術用のエアバックでも用いるポンプを共用することができる。これにより、例えばモータ等の他のアクチュエータに比べても、容易に制御することができるとともに、装置の小型化を図ることができる。
【0066】
(第9実施形態)
図12を参照して本発明の第9実施形態について説明する。
第9実施形態のマッサージ機では、複数のエアバックを重ねて用いることによって各揺動領域の間隔を調整するように構成した。
【0067】
図12(a)及び図12(b)に示すように、脚施術部170は、その底面173に2つの施術用のエアバック174,175が垂直方向に重ねて配設されている。使用者の脚LG側に位置するエアバック174は、膨張することによって、使用者の脚LGを支持するとともに施術を行うものであり、使用者の脚の外側に面する側壁171側から内側に面する側壁172側まで、底面173を覆うように配設されている。このエアバック174は、内側の側壁172側では底面173に固定されておらず、外側の側壁171側で底面173に固定されている。また、エアバック174は、内側の側壁172側で、底面173側に位置するエアバック175と重なって配設されている。その一方で、底面173側に位置するエアバック175は、使用者の脚に沿って延伸する形状であり、外側の側壁171側には配設されておらず、内側の側壁172側だけに配設されるように底面173に固定されている。
【0068】
このような構成において、揺動停止時では、エアバック174,175を収縮させることによって、使用者の脚LGが底面173に対して傾斜することなく水平に脚施術部170に保持される(第1の位置)。その一方で、揺動時では、図12(b)に示すように、エアバック174,175の両方を膨張させることによって、エアバック174が外側の側壁171側で底面173に固定されているため、内側の側壁172側で大きく膨張することとなる。また、内側の側壁172側のみに配設されたエアバック175の膨張により、エアバック174は、外側の側壁171側を支点として内側の側壁172側が更に持ち上がる(第2の位置)。このため、使用者の脚LGが底面173に対して外側に傾斜するように脚施術部170に保持される。このように、使用者の脚LGを外側に向かって傾斜させることによって、使用者の足の爪先を外側に向かせることができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、エアバック174,175が揺動間隔拡大機構179に相当する。
【0069】
また、図12(c)に示すように、脚施術部176において、重ねて配設される複数のエアバック177,178が、外側の側壁171側で底面173に固定されるように構成してもよい。なお、本実施形態において、エアバック177,178が揺動間隔拡大機構179’に相当する。
【0070】
(第10実施形態)
図13を参照して本発明の第10実施形態について説明する。
第10実施形態のマッサージ機では、揺動時では、使用者の両脚の高さを異ならせることによって、各揺動領域の間隔を調整するように構成した。
【0071】
図13(a)に示すように、脚施術部180には、使用者の脚LGを裏側に面する底板181L,181Rが配設されており、駆動機構182の駆動により底面183に対して垂直方向に変位可能であり、これによって、使用者の脚LGを持ち上げることができる。特に、本実施形態では、揺動停止時では、底板181L,181Rの両方が低い位置に配置される(第1の位置)。その一方で、揺動時では、図13(a)に示すように、一方の底板181Rのみが高い位置に配置され、他方の底板181Lが低い位置に配置される(第2の位置)。このため、揺動時では、使用者の脚の一方のみが持ち上げられ、他方との高さが異なることとなり、図13(b)に示すように、使用者の足FTの高さを異ならせることができる。これによって、使用者の足FTが揺動された場合であっても、各揺動領域をずらすことができるとともに、各揺動領域の間隔を拡大することができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。また、両方の脚の高さが異なるため、両方の脚の高さが同じである場合とは揺動感を異ならせることができる。なお、本実施形態において、底板181L,181R及び駆動機構182が揺動間隔拡大機構189に相当する。
【0072】
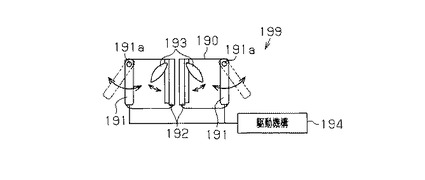
(第11実施形態)
図14を参照して本発明の第11実施形態について説明する。
第11実施形態のマッサージ機では、外側の側壁を変位させることによって、各揺動領域の間隔を調整するように構成した。
【0073】
図14に示すように、脚施術部190において、駆動機構194の駆動により、座部側の端部における回動軸191aを中心に外側の側壁191が回動可能である。また、内側の側壁192には、座部側の端部にエアバック193が配設されている。
【0074】
この構成において、揺動停止時では、エアバック193を収縮させるとともに、外側の側壁191が回動せずに使用者の脚に沿って延伸するように配置される。その一方で、揺動時では、エアバック193を膨張させるとともに、外側の側壁191が回動して、使用者の脚を外側に伸びるように傾斜して配置される。これによって、使用者の両脚の間隔及び使用者の両足の間隔が開き、両足の揺動領域の間隔を拡大することができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。なお、本実施形態において、側壁191、エアバック193及び駆動機構194が揺動間隔拡大機構199に相当する。
【0075】
(第12実施形態)
図15を参照して、本発明の第12実施形態について説明する。
第12実施形態のマッサージ機では、座部に対するオットマンの角度によって、揺動時では、脚施術部及び足施術部のうち少なくともいずれか一方が異なる配置となるように構成とした。
【0076】
図10に示す第7実施形態に本実施形態を追加した場合の一例とする。図15(a)に示すように、脚施術部150が鉛直方向に対して小さい角度で傾斜している場合には、使用者の足FTが下方に向かうように使用者の脚LGが脚施術部150に保持される。その一方で、図15(e)に示すように、脚施術部150が鉛直方向に対して大きい角度で傾斜している場合には、使用者の足FTが前方に向かうように使用者の脚LGが脚施術部150に保持される。
【0077】
図15(f)に示すように、脚施術部150が大きい角度で傾斜している場合には、図15(b)に示すように、脚施術部150が小さい角度で傾斜している場合よりも、爪先が接触し易くなる傾向があるためである。これは、使用者の膝が伸展することで脚LGが内旋し、使用者の足FTが内側に向くからである。このため、脚施術部150が大きい角度で傾斜している場合には、脚施術部150が小さい角度で傾斜している場合よりも、両足の揺動領域の間隔が拡大するように調整される。
【0078】
制御装置61は、脚施術部150(オットマン12)が傾斜すると、その傾斜角度を記憶する。そして、揺動時では、制御装置61は、記憶した傾斜角度が予め定められた規定角度よりも大きいか否かにより、図15(c)及び図15(g)に示すように、内側の側壁153側の底板155の高さを駆動機構154の駆動により変化させる。
【0079】
具体的には、揺動時では、制御装置61は、脚施術部150が規定角度よりも小さい角度で傾斜している場合、図15(c)に示すように、幅方向に対して外側の側壁152側よりも内側の側壁153側のほうが高くなるように底板155を変位させる。その一方で、制御装置61は、脚施術部150が規定角度よりも大きい角度で傾斜している場合、図15(g)に示すように、規定角度よりも小さい角度で傾斜している場合よりも、内側の側壁153側が高くなるように底板155を変位させる。なお、制御装置61は、脚施術部150の傾斜角度や揺動時であるか揺動停止時であるか否かに拘わらず、外側の側壁152側では、同じように底板155を高さ方向に変位させない。このため、制御装置61は、揺動時では脚施術部150が規定角度よりも大きい角度で傾斜している場合、小さい角度で傾斜している場合よりも大きく、前後方向を回動軸として幅方向に対して外側に底板155を傾斜させることとなる。
【0080】
したがって、揺動時では脚施術部150の傾斜角度が小さければ、図15(c)に示すように、小さい角度で底板155を傾斜させ、脚施術部150の傾斜角度が大きければ、図15(g)に示すように、大きい角度で底板155を傾斜させる。つまり、制御装置61は、幅方向を回動軸とする脚施術部150の傾斜角度を入力パラメータとして、その入力パラメータに応じて、例えば角度や長さ等の変更量を制御することとなる。これによって、図15(d)及び図15(h)に示すように、脚施術部150の傾斜角度に拘わらず、各揺動領域の間隔を拡大するように調整することができる。
【0081】
このように、脚施術部150(オットマン)の角度に応じて第1揺動領域と第2揺動領域との間隔を変化させる。特に、脚施術部150の角度が高くなるにつれて、両足の間隔が狭くなる傾向があるため、鉛直方向に対する脚施術部150の角度が大きくなると、第1揺動領域と第2揺動領域との間隔を拡大するように変化させる。これによって、使用者の両方の足FTを接触させ難くすることができ、効果的に揺動を伝えることができる。
【0082】
(第13実施形態)
図16を参照して本発明の第13実施形態について説明する。
第13実施形態のマッサージ機では、揺動停止時であるか揺動時ではないかに拘わらず、脚施術部の全体や一部を変位させることによって、各揺動領域の間隔を調整するように構成した。
【0083】
図16(a)に示すように、脚施術部200において、使用者の脚が保持される底板203が、別体で形成されており、底面から突出する支持部材204に、使用者の脚に沿う回動軸203aを中心に回動可能に軸着されている。この支持部材204は、外側の側壁201と内側の側壁202との中心に配置されている。そして、底板203の下方から弾性力が加えられる弾性部材205〜208が、それぞれ外側の側壁201側と内側の側壁202側との両方に配設されている。なお、本実施形態において、弾性部材としては圧縮コイルばねを用いる。これらの弾性部材205〜208のうち、内側の側壁202側に配設された弾性部材206,207のほうが、外側の側壁201側に配設された弾性部材205,208よりもそれぞればね定数が大きく、大きな弾性力が加えられる。このため、底板203は、外側の側壁201側よりも、内側の側壁202側のほうが高くなり、外側に面するように傾斜することとなる。このように、揺動停止時であるか揺動時であるかに拘わらず、使用者の脚を外側に向かって傾斜させることによって、使用者の足の爪先を外側に向かせることができ、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。
【0084】
特に、底板203に使用者の脚を保持すると、揺動時では、使用者の脚が左右に移動することもある。そして、内側の側壁202側に配設された弾性部材206,207のほうが、外側の側壁201側に配設された弾性部材205,208よりも弾性力が大きい。このため、外側揺動幅よりも内側揺動幅のほうが小さくなり、両足の揺動領域の間隔が拡大されることとなる。このように、使用者の脚が内側に揺動し難くさせることによって、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。また、左右の脚で高さを異ならせるようにばね定数を左右で異ならせてもよい。なお、本実施形態において、底板203及び弾性部材205〜208が揺動間隔拡大機構209に相当する。また、図16(b)に示すように、脚施術部210において、外側の側壁201側における回転軸213aを中心に回動可能な底板213が配設され、内側の側壁202側にだけ弾性部材214,215を配設するように構成してもよい。なお、本実施形態において、底板213及び弾性部材214,215が揺動間隔拡大機構219に相当する。
【0085】
(第14実施形態)
図17を参照して、本発明の第14実施形態について説明する。
第14実施形態のマッサージ機では、揺動時と揺動停止時とで揺動領域が同じであるが、脚施術部全体やその側壁や底面が傾斜することによって、傾斜しない場合よりも第1揺動領域と第2揺動領域との間隔を拡大するように調整する構成とした。
【0086】
図17(a)に示すように、脚施術部220において、底面223が傾斜して形成されており、外側の側壁221よりも内側の側壁222のほうが高い位置となる。このため、揺動機構により脚施術部220が幅方向に揺動された場合、使用者の脚が幅方向に開き、使用者の両足間が広がり、両足の爪先が揺動により接触しない距離に使用者の足が保持される。つまり、脚施術部220における底面223が外側に傾斜するように形成されることで、外側揺動幅よりも内側揺動幅のほうが小さくなり、揺動時では両足の揺動領域の間隔が、底面が平面又は内側に傾斜する場合よりも拡大される。これによって、両足の揺動領域が重ならずに、両方の爪先が揺動により接触しないこととなる。このように、脚施術部220の底面223を脚施術部220に対して傾斜させて形成することによって、第1揺動領域と第2揺動領域との間隔を拡大させることができる。したがって、他のアクチュエータを別途設ける必要がなく、軽量化を図ることもできるとともに、例えば揺動速度及び揺動幅の範囲等の制御量を大きくすることができ、効果的な揺動感を提供することができる。なお、本実施形態において、外側に傾斜する底面223が揺動間隔拡大機構229に相当する。もちろん、内側の側壁が幅方向に向かって外側に傾斜するような形状であってもよく、これらの組み合わせであってもよい。
【0087】
また、図17(b)に示すように、揺動時と揺動停止時とで同じように、常時、脚施術部230自体が前後方向(使用者の矢状面でもある)に対して幅方向に傾斜するように構成してもよい。これにより、側壁231,232が前後方向に対して幅方向に傾斜するように配置される。このように、脚施術部230自体を幅方向に対して外側に傾斜させて配置することによって、第1揺動領域と第2揺動領域との間隔を拡大させることができる。したがって、他のアクチュエータを別途設ける必要がなく、軽量化を図ることもできるとともに、例えば揺動速度及び揺動幅の範囲等の制御量を大きくすることができ、効果的な揺動感を提供することができる。なお、本実施形態において、脚施術部220において幅方向に傾斜する側壁231,232が揺動間隔拡大機構239に相当する。
【0088】
なお、本実施形態は以下のような別の実施形態に変更してもよい。
・第12実施形態では、脚施術部150が規定角度よりも大きいか小さいかの2段階毎に、揺動領域を変化させるように構成したが、これに限らず、3段階以上毎に、揺動領域を変化させるように構成してもよい。つまり、脚施術部150の傾斜角度に連動して、揺動間隔拡大機構が動作すればよい。
【0089】
・第12実施形態では、脚施術部150の傾斜角度に応じて、揺動領域を調整したが、これに限らず、例えば、揺動強度や揺動速度に応じて、揺動領域を調整してもよい。また、これらの組み合わせであってもよい。
【0090】
・第1〜第12実施形態では、制御装置の制御により、脚施術部及び足施術部の少なくともいずれか一方の全体又は一部を変位させる構成であったが、これに限らず、例えば、使用者の操作により手動で変位させる構成であってもよい。
【0091】
・第1〜第13実施形態では、それぞれ、脚施術部のみ、足施術部のみ、脚施術部及び足施術部を変位させるように構成したが、これに限らず、脚施術部及び足施術部の少なくともいずれか一方であればよい。
【0092】
・上記実施形態では、各施術部には、側壁と底面(又は底板)が形成されたが、これに限らず、例えば、側壁の一方又は両方が形成されなくてもよい。
・上記実施形態では、脚施術部及び足施術部の両方が連動して傾斜するように構成したが、これに限らず、脚施術部のみが傾斜し、足施術部が傾斜せずに下方に配設されるように構成してもよい。
【0093】
・上記実施形態では、座部13、背もたれ部14及び肘掛部15に、使用者を施術する各種機構を備えた構成としたが、これに限らず、いずれかを備えない構成であってもよい。
【0094】
・上記実施形態では、脚施術部及び足施術部の両方で使用者の脚や足を施術するように構成したが、これに限らず、いずれか一方で施術するように構成してもよい。例えば、使用者の脚を施術しない構成であったり、使用者の足を施術しない構成であったりしてもよい。また、揺動機構16の揺動以外に、エアバック等により使用者の脚を施術しなくてもよく、揺動機構16による揺動が伝達される脚施術部及び足施術部の少なくともいずれか一方が配設されればよい。
【0095】
次に、上記実施形態及び別例から把握できる技術的思想を以下に追記する。
(イ) 前記脚保持部及び前記足保持部のうち少なくともいずれか一方には、前記揺動機構による揺動とは別で、使用者の脚及び足のうち少なくともいずれか一方を施術する施術機構が設けられたことを特徴とする請求項1〜請求項8のうちいずれか一項に記載の脚揺動装置。
【0096】
(ロ) 前記揺動間隔拡大機構は、前記脚保持部及び前記足保持部のうち少なくともいずれか一方において、膨張収縮駆動させることにより使用者の脚及び足のうち少なくとも一方を施術するエアバックを用いて構成されることを特徴とする請求項1〜請求項4のうちいずれか一項に記載の脚揺動装置。
【符号の説明】
【0097】
10…マッサージ機、11…マッサージ椅子本体、12…オットマン、13…座部、16…揺動機構、20,120…足施術部、30,100,110,130,140,150,160,165,167,170,176,180,190,200,210,220,230…脚施術部、49,109,119,139,149,159,169,179,179’,189,199,209,219,229,239…揺動間隔拡大機構、R1…第1揺動領域、R2…第2揺動領域。
【特許請求の範囲】
【請求項1】
使用者の脚を保持する脚保持部と、使用者の足を保持する足保持部とのうち少なくともいずれか一方を備え、使用者の脚を揺動させることで施術する揺動機構を備えた脚揺動装置において、
前記脚保持部及び前記足保持部のうち少なくともいずれか一方には、前記揺動機構によって使用者の脚を揺動させる場合に、使用者の一方の足が揺動することが許可される第1揺動領域と、使用者の他方の足が揺動することが許可される第2揺動領域との間隔を拡大させる揺動間隔拡大機構が設けられたことを特徴とする脚揺動装置。
【請求項2】
前記揺動間隔拡大機構は、前記揺動機構による揺動が行われているときには、前記揺動機構による揺動が行われる前よりも、前記第1揺動領域と前記第2揺動領域との間隔を拡大させることを特徴とする請求項1に記載の脚揺動装置。
【請求項3】
前記脚保持部及び前記足保持部のうち少なくともいずれか一方に、底面及び側壁が設けられ、
前記揺動間隔拡大機構は、前記底面及び前記側壁のうち少なくともいずれか一方を、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように変位させることを特徴とする請求項1又は請求項2に記載の脚揺動装置。
【請求項4】
前記脚保持部及び前記足保持部のうち少なくともいずれか一方に、底面及び側壁が設けられ、
前記揺動間隔拡大機構は、前記底面及び前記側壁が設けられた前記脚保持部及び前記足保持部のうち少なくともいずれか一方を、該底面及び該側壁を一体として、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように変位させることを特徴とする請求項1〜請求項3のうちいずれか一項に記載の脚揺動装置。
【請求項5】
前記揺動間隔拡大機構は、膨張収縮駆動させるエアバックを用いて構成されることを特徴とする請求項1〜請求項4のうちいずれか一項に記載の脚揺動装置。
【請求項6】
前記揺動間隔拡大機構は、使用者の足の内側方向に対する揺動幅を、外側方向に対する揺動幅よりも小さくすることで、前記第1揺動領域と前記第2揺動領域との間隔を拡大させることを特徴とする請求項1〜請求項5のうちいずれか一項に記載の脚揺動装置。
【請求項7】
前記揺動間隔拡大機構は、前記脚揺動装置の角度に応じて前記第1揺動領域と前記第2揺動領域との間隔を変化させることを特徴する請求項1〜6のうちいずれか一項に記載の脚揺動装置。
【請求項8】
前記揺動間隔拡大機構は、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に設けられた底面及び側壁を含む構成であり、
前記底面及び前記側壁のうち少なくともいずれか一方は、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に対して傾斜して形成されていることを特徴する請求項1又は請求項6に記載の脚揺動装置。
【請求項9】
臀部を支持する座部と背中を支持する背もたれとを備えたマッサージ機において、
請求項1〜8のうち少なくともいずれか一項に記載の脚揺動装置を備えたことを特徴とするマッサージ機。
【請求項1】
使用者の脚を保持する脚保持部と、使用者の足を保持する足保持部とのうち少なくともいずれか一方を備え、使用者の脚を揺動させることで施術する揺動機構を備えた脚揺動装置において、
前記脚保持部及び前記足保持部のうち少なくともいずれか一方には、前記揺動機構によって使用者の脚を揺動させる場合に、使用者の一方の足が揺動することが許可される第1揺動領域と、使用者の他方の足が揺動することが許可される第2揺動領域との間隔を拡大させる揺動間隔拡大機構が設けられたことを特徴とする脚揺動装置。
【請求項2】
前記揺動間隔拡大機構は、前記揺動機構による揺動が行われているときには、前記揺動機構による揺動が行われる前よりも、前記第1揺動領域と前記第2揺動領域との間隔を拡大させることを特徴とする請求項1に記載の脚揺動装置。
【請求項3】
前記脚保持部及び前記足保持部のうち少なくともいずれか一方に、底面及び側壁が設けられ、
前記揺動間隔拡大機構は、前記底面及び前記側壁のうち少なくともいずれか一方を、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように変位させることを特徴とする請求項1又は請求項2に記載の脚揺動装置。
【請求項4】
前記脚保持部及び前記足保持部のうち少なくともいずれか一方に、底面及び側壁が設けられ、
前記揺動間隔拡大機構は、前記底面及び前記側壁が設けられた前記脚保持部及び前記足保持部のうち少なくともいずれか一方を、該底面及び該側壁を一体として、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように変位させることを特徴とする請求項1〜請求項3のうちいずれか一項に記載の脚揺動装置。
【請求項5】
前記揺動間隔拡大機構は、膨張収縮駆動させるエアバックを用いて構成されることを特徴とする請求項1〜請求項4のうちいずれか一項に記載の脚揺動装置。
【請求項6】
前記揺動間隔拡大機構は、使用者の足の内側方向に対する揺動幅を、外側方向に対する揺動幅よりも小さくすることで、前記第1揺動領域と前記第2揺動領域との間隔を拡大させることを特徴とする請求項1〜請求項5のうちいずれか一項に記載の脚揺動装置。
【請求項7】
前記揺動間隔拡大機構は、前記脚揺動装置の角度に応じて前記第1揺動領域と前記第2揺動領域との間隔を変化させることを特徴する請求項1〜6のうちいずれか一項に記載の脚揺動装置。
【請求項8】
前記揺動間隔拡大機構は、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に設けられた底面及び側壁を含む構成であり、
前記底面及び前記側壁のうち少なくともいずれか一方は、前記第1揺動領域と前記第2揺動領域との間隔を拡大させるように、前記脚保持部及び前記足保持部のうち少なくともいずれか一方に対して傾斜して形成されていることを特徴する請求項1又は請求項6に記載の脚揺動装置。
【請求項9】
臀部を支持する座部と背中を支持する背もたれとを備えたマッサージ機において、
請求項1〜8のうち少なくともいずれか一項に記載の脚揺動装置を備えたことを特徴とするマッサージ機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−59552(P2013−59552A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−200915(P2011−200915)
【出願日】平成23年9月14日(2011.9.14)
【出願人】(000005821)パナソニック株式会社 (73,050)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月14日(2011.9.14)
【出願人】(000005821)パナソニック株式会社 (73,050)
[ Back to top ]