
脚車輪型移動ロボット、その動作方法及びプログラム
【課題】ロボット内部に過大な応力を発生させずに姿勢変更動作を高ゲインの局所位置フィードバック制御により行うことができる脚車輪型移動ロボット、その動作方法及びプログラムを提供する。
【解決手段】本体1と、本体1に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚3、5と、複数の脚3、5のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、各脚3、5は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪9と、車輪9の回転を制動するブレーキと、を有する脚車輪型移動ロボット10において、駆動モータを制御し本体1の姿勢を変化させる時に、複数の脚3、5の少なくともいずれかのブレーキを非作動にし、車輪9が回転移動可能となった該脚から、本体1の姿勢変化によってロボット内部に蓄積される応力を外部に解放する。
【解決手段】本体1と、本体1に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚3、5と、複数の脚3、5のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、各脚3、5は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪9と、車輪9の回転を制動するブレーキと、を有する脚車輪型移動ロボット10において、駆動モータを制御し本体1の姿勢を変化させる時に、複数の脚3、5の少なくともいずれかのブレーキを非作動にし、車輪9が回転移動可能となった該脚から、本体1の姿勢変化によってロボット内部に蓄積される応力を外部に解放する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歩行用の複数の脚を有し、脚先端には接地面上を走行可能な車輪が取り付けられている脚車輪型移動ロボット、その動作方法及びプログラムに関する。
【背景技術】
【0002】
今後、生活、医療福祉、公共分野等へのサービスロボットの需要増加が見込まれている。人間と共に働くロボットにとって、移動は重要な機能の1つであり、工場等を効率的かつ高速に移動可能な構成を有する脚車輪型移動ロボットの開発が行われている。
【0003】
脚車輪型移動ロボットは、平坦地では安定姿勢で脚先端に取り付けられた車輪で走行し、階段等の段差や溝などの障害物がある場所では、例えば3本脚を、回転、伸縮動作させて松葉杖をつくように歩行して障害物を越える。
つまり、車輪走行と脚歩行とを組み合わせた動作を行うことで、効率的かつ高速な移動が可能となる。
このような脚車輪型移動ロボットは、例えば特許文献1に開示されている。
【0004】
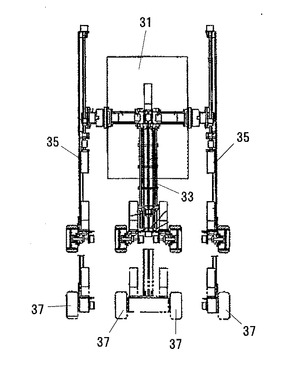
特許文献1の脚車輪型移動ロボットは、図5に示すように、本体31と、本体31の下部に連結され伸縮可能かつ水平軸の周りに本体31に対して回動可能な中央脚33と、本体31の左右両側に連結され伸縮可能かつ本体31に対して水平軸の周りに回動可能な側脚35と、を有する。
中央脚33と側脚35の下端には、接地面上を走行可能な車輪37が取り付けられている。
【0005】
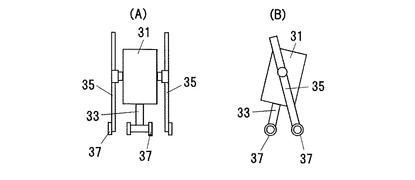
図6は、この脚車輪型移動ロボットの走行動作を示しており、図6(A)は正面図、図6(B)は側面図である。図6(B)に示すように、中央脚33と側脚35とを互いに対し大きく開き安定した状態で、中央脚33及び側脚35の車輪37が駆動されることで接地面上を走行することができる。
【0006】
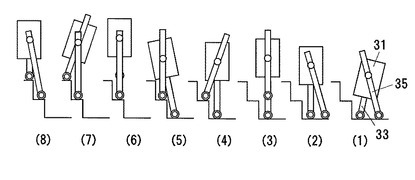
一方、図7は、脚車輪型移動ロボットの歩行動作を示している。図7に示すように、中央脚33と側脚35の回転、伸縮動作を組み合わせることで、状態(1)から状態(8)まで歩行し階段を踏破することができる。
【0007】
このように歩行を行う際の中央脚33及び側脚35の伸縮、回転は、それぞれの動作に対応する駆動モータ(例えば、サーボモータ)により駆動され、駆動モータの制御は次のように行っている。
動作プログラム等に従った駆動モータの時々刻々の指令位置と、駆動モータに取り付けられた位置検出器から読み込まれた現在位置としての位置フィードバックとの差分をとって位置偏差とする。この位置偏差に位置ループゲインを乗じて求められた速度指令を出力する。
この速度指令と、位置検出器から読み込まれた現在位置より求められた速度フィードバックとの差分をとって速度偏差とし、この速度偏差に基づいて電流指令が出力されるようになっている。
さらに、この電流指令と、検出された駆動モータに流れる実電流としての電流フィードバックとの差分に基づき駆動モータへモータ電流を出力するようになっている。
このような位置フィードバック制御を行うことにより、図7に示すような動作が行われる。
【0008】
一般的に、位置フィードバック制御において、位置ループゲインの値が大きい程、駆動軸の剛性は高くなるので、位置指令に対する駆動軸の追従性は良くなるが、逆に駆動モータや、駆動モータと中央脚33及び側脚35との間に連結された減速機にかかる負荷は大きくなる。
【0009】
ところで、これら複数の駆動モータの制御は、互いに連携をとりながら行う場合が多い。すなわち、ある駆動モータの動作が遅れた場合には、この遅れに合わせて他の駆動モータの動作を補正して駆動する。これにより、ある駆動モータの動作遅れにより、ロボットの各部に無理な力が作用することが防止される。
【特許文献1】特開2003−205480号公報 「脚車輪型移動ロボット」
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかし、このようにそれぞれの駆動モータの制御を互いに連携をとって行うと、制御が複雑となる。そのため、それぞれの駆動モータの間で連携をとらずに、別個に制御する位置フィードバック制御(以下、局所位置フィードバック制御と言う)を行うことで制御を簡単にすることができる。
さらに、中央脚33と側脚35とが接地している状態では、中央脚33及び側脚35が床面に自重や静止摩擦力により保持されており、歩行システムは閉じた連鎖機構のようになっている。
従って、中央脚33と側脚35が共に接地している状態で、ロボットの姿勢を変化させると、動作が動的になるにつれ大きな位置偏差、速度偏差が生じると、駆動モータ等に大きなトルクが発生しロボット内部に過大な応力が生じやすくなる。
このようにロボット内部に発生した応力が脚と接地面との静止摩擦力より大きくなると、脚が接地面上でずれたり、ロボットが跳ね上がったりしてしまう。結果として、ロボットの位置が定まらなくなり制御が困難となる。
特に、各駆動モータの連携をとらないと、この問題は顕著となる。
【0011】
そこで、本発明の目的は、ロボット内部に過大な応力を発生させずに姿勢変更動作を高ゲインの局所位置フィードバック制御により行うことができる脚車輪型移動ロボット、その動作方法及びプログラムを提供することにある。
【課題を解決するための手段】
【0012】
上記目的を達成するため、本発明によると、本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、該複数の駆動モータを制御し前記複数の脚に歩行を行わせる制御装置と、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットであって、前記制御装置は、前記駆動モータを制御し本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する、ことを特徴とする脚車輪型移動ロボット。
【0013】
また、上記目的を達成するため、本発明によると、本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットの動作方法であって、前記駆動モータにより本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する、ことを特徴とする脚車輪型移動ロボットの動作方法が提供される。
【0014】
さらに、上記目的を達成するため、本発明によると、本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットの動作プログラムであって、前記駆動モータにより本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する処理を脚車輪型移動ロボットに組み込まれたコンピュータに実行させることを特徴とする脚車輪型移動ロボットの動作プログラムが提供される。
【0015】
このように、本体の姿勢を変化させる時に、複数の脚の少なくともいずれかの車輪を接地面上で回転移動可能し、そこから、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放するので、高ゲインの局所位置フィードバック制御により本体の姿勢を変化させた場合に駆動モータに過大なトルクが発生しても、車輪が移動することでこのトルクが自動的に外部に解放される。
従って、高ゲインの局所位置フィードバック制御による姿勢変更動作を、ロボット内部に過大な応力を発生させずに行うことができる。
【0016】
本発明の好ましい実施形態によると、上記脚車輪型移動ロボットにおいて、前記複数の脚がそれぞれ対応する前記駆動モータによって回転駆動されるときの各中心軸は、互いに平行な関係にある水平軸であり、前記複数の脚の車輪が回転するときの各中心軸は、前記水平軸と平行な関係にある回転軸である。
【0017】
このように、複数の脚は、それぞれ互いに平行な水平軸の周りに回動駆動され、複数の脚の車輪は、前記水平軸と平行な軸の周りに回転可能であるので、いずれかの脚の回動用の駆動モータに過大なトルクがかかろうとすると、制動装置を非作動にした他の脚の車輪がよりスムーズに回転移動する。
従って、高ゲインの局所位置フィードバック制御により本体の姿勢を変化させた場合にも、駆動モータに過大なトルクが発生することがより確実に防止される。
【0018】
本発明の好ましい実施形態によると、上記脚車輪型移動ロボットにおいて、前記制御装置が前記複数の脚の少なくともいずれかの制動装置を非作動にするのは、前記複数の脚を接地させた状態で前記本体の姿勢を変化させる時である。
【0019】
複数の脚を接地させながら本体の姿勢を変化させる動作を、高ゲインの局所位置フィードバック制御により行うと、脚を回動又は伸縮させる駆動モータに過大なトルクがかかりやすい。
しかし、本発明では、この時に、複数の脚の少なくともいずれかの制動装置を非作動にするので、駆動モータに過大なトルクが発生することが防止される。
【0020】
本発明の好ましい実施形態によると、上記脚車輪型移動ロボットにおいて、前記制御装置が前記複数の脚の少なくともいずれかの制動装置を非作動にするのは、前記複数の脚が歩行動作を行っている間に、前記複数の脚を接地させた状態で前記本体の姿勢を変化させる時である。
【0021】
このように、制御装置は、歩行動作の最中に、複数の脚を接地させながら本体の姿勢を変化させる時に、複数の脚の少なくともいずれかの制動装置を非作動にするので、歩行中に駆動モータのトルクが過大になろうとすると、移動可能となった車輪から解放されるようになる。
従って、高ゲインの局所位置フィードバック制御による歩行を安定して行うことができる。
【0022】
本発明の好ましい実施形態によると、上記脚車輪型移動ロボットにおいて、前記制御装置が、前記複数の脚を接地させながら前記本体の姿勢を変化させる時に、制動装置を非作動にするのは、外部の障害物からの距離を維持する必要がある脚以外の脚である。
【0023】
このように、制御装置は、複数の脚を接地させながら前本体の姿勢を変化させる時に、制動装置を非作動にするのは、外部の障害物との距離を維持するための制御を必要としない脚であるので、段差や溝などの障害物との距離を維持する必要がある脚の制動装置は作動された状態となり、過大なトルクを解放するために制動装置を非作動にした車輪が移動しても、ロボットが障害物に衝突することなどが防止される。
【発明の効果】
【0024】
上述のように、本発明によると、脚車輪型移動ロボットにおいて、ロボット本体の姿勢を変化させる時に、複数の脚の少なくともいずれかの制動装置を非作動にし、該脚の車輪を接地面に対して回転移動可能にするので、駆動モータに過大なトルクがかかろうとすると、移動可能となった車輪から解放させることができるようになる。
従って、高ゲインの局所位置フィードバック制御による姿勢変更動作を、ロボット内部に過大な応力を発生させずに行うことができる。
【発明を実施するための最良の形態】
【0025】
本発明の好ましい実施形態を図面を参照して説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0026】
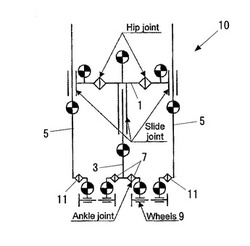
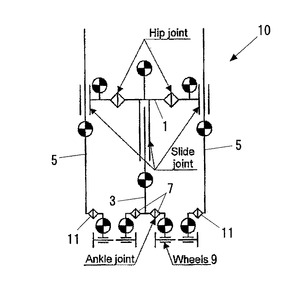
図1は、本発明の実施形態による脚車輪型移動ロボットの全体構成を示している。図2は、この脚車輪型移動ロボットが歩行している際の側面図である。図1、図2に示すように、脚車輪型移動ロボット10は、中央胴体部である本体1と、本体1に連結され水平軸の周りに鉛直面内で回動される中央脚3及び左右一対の側脚5と、を備えた3脚構造である。
【0027】
中央脚3は、本体1に対して鉛直面内での回動動作され、伸縮又は折り曲げ動作されるように本体1に連結され、脚先端に取り付けられ接地面と接触し回転駆動されて接地面上を滑走する車輪9と、該車輪9の回転を制動するブレーキと、を有する。
本体1に対する中央脚3の回転動作と伸縮又は折り曲げ動作は、本体1又は中央脚3に組み込まれた駆動モータ(例えば、サーボモータ)により行われる。
また、中央脚先端には、水平軸の周りに回転可能な2つの関節7が設けられている。
【0028】
側脚5は、本体1に対して鉛直面内で回動動作され、伸縮又は折り曲げ動作されるように本体1に連結され、脚先端に取り付けられ接地面と接触し回転駆動されて接地面上を滑走する車輪9と、該車輪9の回転を制動するブレーキと、を有する。
本体1に対する側脚5の回転動作と伸縮又は折り曲げ動作は、本体1又は側脚5に組み込まれた駆動モータ(例えば、サーボモータ)により行われる。なお、左右の側脚5は互いに同期されて回動されるようになっている。
また、左右の各側脚先端には、水平軸の周りに回転可能な1つの関節11が設けられている。
【0029】
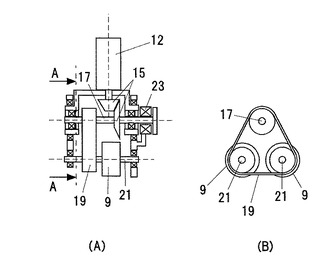
図3(A)は、中央脚3及び側脚5の各々の下端部に設けられた車輪9及びその駆動モータ12の構成を示す側面図である。図3(B)は、図3(A)のA−A線矢視図である。図3(B)に示すように各脚には、車輪9が前後に設けられている。
【0030】
図3において、車輪用の駆動モータ12の回転駆動力は傘歯車15を介して駆動シャフト17に伝達され、駆動シャフト17の回転は伝達ベルト19により車輪シャフト21に伝達されて車輪9が駆動される。
また、図3(A)に示すように、各脚下端部には、駆動シャフト17の回転を制動し、車輪9の回転を停止させるブレーキ23が設けられている。
【0031】
また、脚車輪型移動ロボット10の接地面走行、歩行、姿勢変化などの各動作を制御する制御装置が本体1に設けられている。
すなわち、制御装置は、これら中央脚3と側脚5の各々の回動及び伸縮を行う駆動モータ、及び、各脚の車輪用の駆動モータ12の動作を制御する。なお、制御装置は、例えばオペレータからの指示を無線により受信し、この指示に従いロボットの各動作を制御することができる。また、制御装置は、予め制御装置に記憶されたプログラムに従いロボットの各動作を制御することもできる。
【0032】
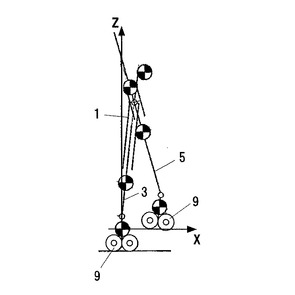
上述の構成を有する脚車輪型移動ロボット10は、接地面上を脚先端の車輪9で走行できる。例えば、中央脚3と左右の側脚5を互いに大きく開いた状態で、中央脚3及び左右の側脚5の車輪9が駆動されることで安定した走行が可能となる。また、この例では、操舵機構を設けていないが、各車輪9に速度差を与えることで旋回が可能となる。
一方、左右の側脚5の回動を同期させ、中央脚3と左右の側脚5を交互に立脚及び遊脚として交互に振り出すことで、歩行動作が行われる。なお、立脚とは脚が接地していることをいい、遊脚とは、脚が接地面から離間していることをいう。
【0033】
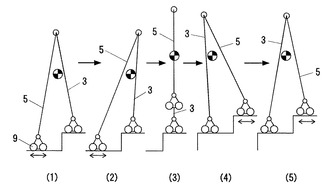
図4は、脚車輪型移動ロボット10が階段を踏破する場合においてブレーキ23を非作動にするタイミングを示す図である。制御装置が、中央脚3及び側脚5の回動及び伸縮を制御することで、図4のような歩行動作が行われる。
図4において、状態(1)から状態(2)へ重心を前方へ移動させるように姿勢を変化させ、側脚5を接地面から離間させ状態(3)を経由し状態(4)のように側脚5を着地させる。続いて、状態(5)へ再び重心を前方へ移動させるように姿勢を変化させる。
このようにして、階段を踏破する動作を行うが、状態(1)から状態(2)へ、又は状態(4)から状態(5)へ姿勢変化させるときに、中央脚3と側脚5の両脚が接地しているので、ロボットは閉じた連鎖機構のようになっている。
【0034】
従って、この姿勢変化を高ゲインの局所位置フィードバック制御により行うと、駆動モータや関節7、11に過大なトルクが作用してしまう傾向がある。
そのため、本発明の実施形態によると、中央脚3と側脚5の両方が接地している状態で、高ゲインの局所位置フィードバック制御により本体1の姿勢を変化させる時に、中央脚3と側脚5のいずれかのブレーキ23を非作動にして、進行方向に移動自在にしておく。
例えば、状態(1)から状態(2)へ姿勢変化させる場合には、側脚5の車輪9のブレーキ23を非作動にし、側脚5を回転移動自在にする。状態(4)から状態(5)へ姿勢変化させる場合も同様に側脚5のブレーキ23を非作動にしておく。
【0035】
これにより、状態(1)から状態(2)へ、又は、状態(4)から状態(5)へ姿勢変化させる時に、高ゲインの局所位置フィードバック制御を行う時に駆動モータ等に過大なトルクがかかろうとすると、ブレーキ非制動の車輪9が自動的に回転移動してトルクが解放されることになる。
【0036】
特に、本実施形態によると、中央脚3及び側脚5は、それぞれ互いに平行な水平軸の周りに回動駆動され、ブレーキ23を非作動にした中央脚3又は側脚5の車輪9は、上記水平軸と平行な軸の周りに回転可能であるように構成されている。
この構成により、図4の状態(1)から状態(2)へ、又は、状態(4)から状態(5)へ姿勢変化させる時に、高ゲインの局所位置フィードバック制御を行うことで駆動モータ等に過大なトルクがかかろうとすると、ブレーキ23を非作動にした他の脚の車輪9がスムーズに回転移動するので、このトルクを確実に解放することができる。
【0037】
脚車輪型移動ロボット10の上述の動作は、上記制御装置により行われるが、ロボット10に組み込まれたコンピュータにより実行することができる。
すなわち、このコンピュータは、上記制御装置と、上述の動作を行うための動作プログラムが記憶された記憶装置と、を含み、この動作プログラムに従って上述の動作のための処理を実行する。
【0038】
以上のように、本発明の実施形態によると、脚車輪型移動ロボットにおいて、中央脚及び側脚を接地させながらロボットの姿勢を変化させる時に、中央脚、一対の側脚の少なくともいずれかのブレーキを非作動にし、この脚の車輪を接地面に対して移動可能にするので、駆動モータ又は関節に大きなトルクが作用しようとすると、ブレーキ非作動の車輪が自動的に移動することでトルクが解放される。
従って、高ゲインの局所位置フィードバック制御により脚の回動又は伸縮動作を行って本体の姿勢を変化させた場合にも、過大なトルクの発生を防止することができ、安定した高速動作が可能となる。
【0039】
また、制御装置が、中央脚及び側脚を接地させながら本体の姿勢を変化させる時に、ブレーキを非作動にするのは、外部の障害物からの距離を維持する必要がある脚以外の脚である。
このように、ブレーキを非作動にするのは、外部の障害物との距離を維持するための制御を必要としない脚であるので、段差や溝などの障害物との距離を維持する必要がある脚のブレーキは作動された状態となり、ロボットが障害物に衝突することなどが防止される。
【0040】
なお、上述では、階段歩行の際に、中央脚と側脚の両方が接地している状態で本体の姿勢を変化させる時に、いずれかの脚のブレーキを非作動にしたが、本発明はこれに限定されない。例えば、ロボットが所定の作業を行うため、姿勢を変化させる時に、特に、中央脚及び側脚を接地させた状態で姿勢を変化させる時に、複数の脚のうち少なくともいずれかのブレーキを非作動にし、駆動モータ等に発生する大きなトルクを解放できる。
また、上述では、3脚歩行を行う脚車輪型移動ロボットの場合であったが、本発明はこれに限定されず、2脚歩行又は4脚以上で歩行を行う脚車輪型移動ロボットにも適用可能である。
さらに、上述では、脚の設けられた車輪はモータにより駆動されるものであったが、車輪の駆動装置を設けずに車輪を脚先端に取り付けてもよい。
また、上述のブレーキ23は、車輪9の回転を制動する制動装置を構成するが、出力軸が車輪の回転軸と同軸に連結されたモータなどのアクチュエータや他の適切な装置で制動装置を構成してもよい。
このように、本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更することができる。
【図面の簡単な説明】
【0041】
【図1】本発明の実施形態による脚車輪型移動ロボットの正面図である。
【図2】本発明の実施形態による脚車輪型移動ロボットの側面図である。
【図3】脚先端に設けられた車輪及びその駆動機構を示す図である。
【図4】本発明の実施形態による車輪のブレーキを非作動にするタイミングを示す図である。
【図5】従来の脚車輪型移動ロボットを示す正面図である。
【図6】従来の脚車輪型移動ロボットの車輪走行を示す図である。
【図7】従来の脚車輪型移動ロボットの歩行動作を示す図である。
【符号の説明】
【0042】
1 本体
3 中央脚
5 側脚
7、11 関節
9 車輪
10 脚車輪型移動ロボット
12 車輪用の駆動モータ
15 傘歯車
17 駆動シャフト
19 伝達ベルト
21 車輪シャフト
23 ブレーキ
【技術分野】
【0001】
本発明は、歩行用の複数の脚を有し、脚先端には接地面上を走行可能な車輪が取り付けられている脚車輪型移動ロボット、その動作方法及びプログラムに関する。
【背景技術】
【0002】
今後、生活、医療福祉、公共分野等へのサービスロボットの需要増加が見込まれている。人間と共に働くロボットにとって、移動は重要な機能の1つであり、工場等を効率的かつ高速に移動可能な構成を有する脚車輪型移動ロボットの開発が行われている。
【0003】
脚車輪型移動ロボットは、平坦地では安定姿勢で脚先端に取り付けられた車輪で走行し、階段等の段差や溝などの障害物がある場所では、例えば3本脚を、回転、伸縮動作させて松葉杖をつくように歩行して障害物を越える。
つまり、車輪走行と脚歩行とを組み合わせた動作を行うことで、効率的かつ高速な移動が可能となる。
このような脚車輪型移動ロボットは、例えば特許文献1に開示されている。
【0004】
特許文献1の脚車輪型移動ロボットは、図5に示すように、本体31と、本体31の下部に連結され伸縮可能かつ水平軸の周りに本体31に対して回動可能な中央脚33と、本体31の左右両側に連結され伸縮可能かつ本体31に対して水平軸の周りに回動可能な側脚35と、を有する。
中央脚33と側脚35の下端には、接地面上を走行可能な車輪37が取り付けられている。
【0005】
図6は、この脚車輪型移動ロボットの走行動作を示しており、図6(A)は正面図、図6(B)は側面図である。図6(B)に示すように、中央脚33と側脚35とを互いに対し大きく開き安定した状態で、中央脚33及び側脚35の車輪37が駆動されることで接地面上を走行することができる。
【0006】
一方、図7は、脚車輪型移動ロボットの歩行動作を示している。図7に示すように、中央脚33と側脚35の回転、伸縮動作を組み合わせることで、状態(1)から状態(8)まで歩行し階段を踏破することができる。
【0007】
このように歩行を行う際の中央脚33及び側脚35の伸縮、回転は、それぞれの動作に対応する駆動モータ(例えば、サーボモータ)により駆動され、駆動モータの制御は次のように行っている。
動作プログラム等に従った駆動モータの時々刻々の指令位置と、駆動モータに取り付けられた位置検出器から読み込まれた現在位置としての位置フィードバックとの差分をとって位置偏差とする。この位置偏差に位置ループゲインを乗じて求められた速度指令を出力する。
この速度指令と、位置検出器から読み込まれた現在位置より求められた速度フィードバックとの差分をとって速度偏差とし、この速度偏差に基づいて電流指令が出力されるようになっている。
さらに、この電流指令と、検出された駆動モータに流れる実電流としての電流フィードバックとの差分に基づき駆動モータへモータ電流を出力するようになっている。
このような位置フィードバック制御を行うことにより、図7に示すような動作が行われる。
【0008】
一般的に、位置フィードバック制御において、位置ループゲインの値が大きい程、駆動軸の剛性は高くなるので、位置指令に対する駆動軸の追従性は良くなるが、逆に駆動モータや、駆動モータと中央脚33及び側脚35との間に連結された減速機にかかる負荷は大きくなる。
【0009】
ところで、これら複数の駆動モータの制御は、互いに連携をとりながら行う場合が多い。すなわち、ある駆動モータの動作が遅れた場合には、この遅れに合わせて他の駆動モータの動作を補正して駆動する。これにより、ある駆動モータの動作遅れにより、ロボットの各部に無理な力が作用することが防止される。
【特許文献1】特開2003−205480号公報 「脚車輪型移動ロボット」
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかし、このようにそれぞれの駆動モータの制御を互いに連携をとって行うと、制御が複雑となる。そのため、それぞれの駆動モータの間で連携をとらずに、別個に制御する位置フィードバック制御(以下、局所位置フィードバック制御と言う)を行うことで制御を簡単にすることができる。
さらに、中央脚33と側脚35とが接地している状態では、中央脚33及び側脚35が床面に自重や静止摩擦力により保持されており、歩行システムは閉じた連鎖機構のようになっている。
従って、中央脚33と側脚35が共に接地している状態で、ロボットの姿勢を変化させると、動作が動的になるにつれ大きな位置偏差、速度偏差が生じると、駆動モータ等に大きなトルクが発生しロボット内部に過大な応力が生じやすくなる。
このようにロボット内部に発生した応力が脚と接地面との静止摩擦力より大きくなると、脚が接地面上でずれたり、ロボットが跳ね上がったりしてしまう。結果として、ロボットの位置が定まらなくなり制御が困難となる。
特に、各駆動モータの連携をとらないと、この問題は顕著となる。
【0011】
そこで、本発明の目的は、ロボット内部に過大な応力を発生させずに姿勢変更動作を高ゲインの局所位置フィードバック制御により行うことができる脚車輪型移動ロボット、その動作方法及びプログラムを提供することにある。
【課題を解決するための手段】
【0012】
上記目的を達成するため、本発明によると、本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、該複数の駆動モータを制御し前記複数の脚に歩行を行わせる制御装置と、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットであって、前記制御装置は、前記駆動モータを制御し本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する、ことを特徴とする脚車輪型移動ロボット。
【0013】
また、上記目的を達成するため、本発明によると、本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットの動作方法であって、前記駆動モータにより本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する、ことを特徴とする脚車輪型移動ロボットの動作方法が提供される。
【0014】
さらに、上記目的を達成するため、本発明によると、本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットの動作プログラムであって、前記駆動モータにより本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する処理を脚車輪型移動ロボットに組み込まれたコンピュータに実行させることを特徴とする脚車輪型移動ロボットの動作プログラムが提供される。
【0015】
このように、本体の姿勢を変化させる時に、複数の脚の少なくともいずれかの車輪を接地面上で回転移動可能し、そこから、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放するので、高ゲインの局所位置フィードバック制御により本体の姿勢を変化させた場合に駆動モータに過大なトルクが発生しても、車輪が移動することでこのトルクが自動的に外部に解放される。
従って、高ゲインの局所位置フィードバック制御による姿勢変更動作を、ロボット内部に過大な応力を発生させずに行うことができる。
【0016】
本発明の好ましい実施形態によると、上記脚車輪型移動ロボットにおいて、前記複数の脚がそれぞれ対応する前記駆動モータによって回転駆動されるときの各中心軸は、互いに平行な関係にある水平軸であり、前記複数の脚の車輪が回転するときの各中心軸は、前記水平軸と平行な関係にある回転軸である。
【0017】
このように、複数の脚は、それぞれ互いに平行な水平軸の周りに回動駆動され、複数の脚の車輪は、前記水平軸と平行な軸の周りに回転可能であるので、いずれかの脚の回動用の駆動モータに過大なトルクがかかろうとすると、制動装置を非作動にした他の脚の車輪がよりスムーズに回転移動する。
従って、高ゲインの局所位置フィードバック制御により本体の姿勢を変化させた場合にも、駆動モータに過大なトルクが発生することがより確実に防止される。
【0018】
本発明の好ましい実施形態によると、上記脚車輪型移動ロボットにおいて、前記制御装置が前記複数の脚の少なくともいずれかの制動装置を非作動にするのは、前記複数の脚を接地させた状態で前記本体の姿勢を変化させる時である。
【0019】
複数の脚を接地させながら本体の姿勢を変化させる動作を、高ゲインの局所位置フィードバック制御により行うと、脚を回動又は伸縮させる駆動モータに過大なトルクがかかりやすい。
しかし、本発明では、この時に、複数の脚の少なくともいずれかの制動装置を非作動にするので、駆動モータに過大なトルクが発生することが防止される。
【0020】
本発明の好ましい実施形態によると、上記脚車輪型移動ロボットにおいて、前記制御装置が前記複数の脚の少なくともいずれかの制動装置を非作動にするのは、前記複数の脚が歩行動作を行っている間に、前記複数の脚を接地させた状態で前記本体の姿勢を変化させる時である。
【0021】
このように、制御装置は、歩行動作の最中に、複数の脚を接地させながら本体の姿勢を変化させる時に、複数の脚の少なくともいずれかの制動装置を非作動にするので、歩行中に駆動モータのトルクが過大になろうとすると、移動可能となった車輪から解放されるようになる。
従って、高ゲインの局所位置フィードバック制御による歩行を安定して行うことができる。
【0022】
本発明の好ましい実施形態によると、上記脚車輪型移動ロボットにおいて、前記制御装置が、前記複数の脚を接地させながら前記本体の姿勢を変化させる時に、制動装置を非作動にするのは、外部の障害物からの距離を維持する必要がある脚以外の脚である。
【0023】
このように、制御装置は、複数の脚を接地させながら前本体の姿勢を変化させる時に、制動装置を非作動にするのは、外部の障害物との距離を維持するための制御を必要としない脚であるので、段差や溝などの障害物との距離を維持する必要がある脚の制動装置は作動された状態となり、過大なトルクを解放するために制動装置を非作動にした車輪が移動しても、ロボットが障害物に衝突することなどが防止される。
【発明の効果】
【0024】
上述のように、本発明によると、脚車輪型移動ロボットにおいて、ロボット本体の姿勢を変化させる時に、複数の脚の少なくともいずれかの制動装置を非作動にし、該脚の車輪を接地面に対して回転移動可能にするので、駆動モータに過大なトルクがかかろうとすると、移動可能となった車輪から解放させることができるようになる。
従って、高ゲインの局所位置フィードバック制御による姿勢変更動作を、ロボット内部に過大な応力を発生させずに行うことができる。
【発明を実施するための最良の形態】
【0025】
本発明の好ましい実施形態を図面を参照して説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0026】
図1は、本発明の実施形態による脚車輪型移動ロボットの全体構成を示している。図2は、この脚車輪型移動ロボットが歩行している際の側面図である。図1、図2に示すように、脚車輪型移動ロボット10は、中央胴体部である本体1と、本体1に連結され水平軸の周りに鉛直面内で回動される中央脚3及び左右一対の側脚5と、を備えた3脚構造である。
【0027】
中央脚3は、本体1に対して鉛直面内での回動動作され、伸縮又は折り曲げ動作されるように本体1に連結され、脚先端に取り付けられ接地面と接触し回転駆動されて接地面上を滑走する車輪9と、該車輪9の回転を制動するブレーキと、を有する。
本体1に対する中央脚3の回転動作と伸縮又は折り曲げ動作は、本体1又は中央脚3に組み込まれた駆動モータ(例えば、サーボモータ)により行われる。
また、中央脚先端には、水平軸の周りに回転可能な2つの関節7が設けられている。
【0028】
側脚5は、本体1に対して鉛直面内で回動動作され、伸縮又は折り曲げ動作されるように本体1に連結され、脚先端に取り付けられ接地面と接触し回転駆動されて接地面上を滑走する車輪9と、該車輪9の回転を制動するブレーキと、を有する。
本体1に対する側脚5の回転動作と伸縮又は折り曲げ動作は、本体1又は側脚5に組み込まれた駆動モータ(例えば、サーボモータ)により行われる。なお、左右の側脚5は互いに同期されて回動されるようになっている。
また、左右の各側脚先端には、水平軸の周りに回転可能な1つの関節11が設けられている。
【0029】
図3(A)は、中央脚3及び側脚5の各々の下端部に設けられた車輪9及びその駆動モータ12の構成を示す側面図である。図3(B)は、図3(A)のA−A線矢視図である。図3(B)に示すように各脚には、車輪9が前後に設けられている。
【0030】
図3において、車輪用の駆動モータ12の回転駆動力は傘歯車15を介して駆動シャフト17に伝達され、駆動シャフト17の回転は伝達ベルト19により車輪シャフト21に伝達されて車輪9が駆動される。
また、図3(A)に示すように、各脚下端部には、駆動シャフト17の回転を制動し、車輪9の回転を停止させるブレーキ23が設けられている。
【0031】
また、脚車輪型移動ロボット10の接地面走行、歩行、姿勢変化などの各動作を制御する制御装置が本体1に設けられている。
すなわち、制御装置は、これら中央脚3と側脚5の各々の回動及び伸縮を行う駆動モータ、及び、各脚の車輪用の駆動モータ12の動作を制御する。なお、制御装置は、例えばオペレータからの指示を無線により受信し、この指示に従いロボットの各動作を制御することができる。また、制御装置は、予め制御装置に記憶されたプログラムに従いロボットの各動作を制御することもできる。
【0032】
上述の構成を有する脚車輪型移動ロボット10は、接地面上を脚先端の車輪9で走行できる。例えば、中央脚3と左右の側脚5を互いに大きく開いた状態で、中央脚3及び左右の側脚5の車輪9が駆動されることで安定した走行が可能となる。また、この例では、操舵機構を設けていないが、各車輪9に速度差を与えることで旋回が可能となる。
一方、左右の側脚5の回動を同期させ、中央脚3と左右の側脚5を交互に立脚及び遊脚として交互に振り出すことで、歩行動作が行われる。なお、立脚とは脚が接地していることをいい、遊脚とは、脚が接地面から離間していることをいう。
【0033】
図4は、脚車輪型移動ロボット10が階段を踏破する場合においてブレーキ23を非作動にするタイミングを示す図である。制御装置が、中央脚3及び側脚5の回動及び伸縮を制御することで、図4のような歩行動作が行われる。
図4において、状態(1)から状態(2)へ重心を前方へ移動させるように姿勢を変化させ、側脚5を接地面から離間させ状態(3)を経由し状態(4)のように側脚5を着地させる。続いて、状態(5)へ再び重心を前方へ移動させるように姿勢を変化させる。
このようにして、階段を踏破する動作を行うが、状態(1)から状態(2)へ、又は状態(4)から状態(5)へ姿勢変化させるときに、中央脚3と側脚5の両脚が接地しているので、ロボットは閉じた連鎖機構のようになっている。
【0034】
従って、この姿勢変化を高ゲインの局所位置フィードバック制御により行うと、駆動モータや関節7、11に過大なトルクが作用してしまう傾向がある。
そのため、本発明の実施形態によると、中央脚3と側脚5の両方が接地している状態で、高ゲインの局所位置フィードバック制御により本体1の姿勢を変化させる時に、中央脚3と側脚5のいずれかのブレーキ23を非作動にして、進行方向に移動自在にしておく。
例えば、状態(1)から状態(2)へ姿勢変化させる場合には、側脚5の車輪9のブレーキ23を非作動にし、側脚5を回転移動自在にする。状態(4)から状態(5)へ姿勢変化させる場合も同様に側脚5のブレーキ23を非作動にしておく。
【0035】
これにより、状態(1)から状態(2)へ、又は、状態(4)から状態(5)へ姿勢変化させる時に、高ゲインの局所位置フィードバック制御を行う時に駆動モータ等に過大なトルクがかかろうとすると、ブレーキ非制動の車輪9が自動的に回転移動してトルクが解放されることになる。
【0036】
特に、本実施形態によると、中央脚3及び側脚5は、それぞれ互いに平行な水平軸の周りに回動駆動され、ブレーキ23を非作動にした中央脚3又は側脚5の車輪9は、上記水平軸と平行な軸の周りに回転可能であるように構成されている。
この構成により、図4の状態(1)から状態(2)へ、又は、状態(4)から状態(5)へ姿勢変化させる時に、高ゲインの局所位置フィードバック制御を行うことで駆動モータ等に過大なトルクがかかろうとすると、ブレーキ23を非作動にした他の脚の車輪9がスムーズに回転移動するので、このトルクを確実に解放することができる。
【0037】
脚車輪型移動ロボット10の上述の動作は、上記制御装置により行われるが、ロボット10に組み込まれたコンピュータにより実行することができる。
すなわち、このコンピュータは、上記制御装置と、上述の動作を行うための動作プログラムが記憶された記憶装置と、を含み、この動作プログラムに従って上述の動作のための処理を実行する。
【0038】
以上のように、本発明の実施形態によると、脚車輪型移動ロボットにおいて、中央脚及び側脚を接地させながらロボットの姿勢を変化させる時に、中央脚、一対の側脚の少なくともいずれかのブレーキを非作動にし、この脚の車輪を接地面に対して移動可能にするので、駆動モータ又は関節に大きなトルクが作用しようとすると、ブレーキ非作動の車輪が自動的に移動することでトルクが解放される。
従って、高ゲインの局所位置フィードバック制御により脚の回動又は伸縮動作を行って本体の姿勢を変化させた場合にも、過大なトルクの発生を防止することができ、安定した高速動作が可能となる。
【0039】
また、制御装置が、中央脚及び側脚を接地させながら本体の姿勢を変化させる時に、ブレーキを非作動にするのは、外部の障害物からの距離を維持する必要がある脚以外の脚である。
このように、ブレーキを非作動にするのは、外部の障害物との距離を維持するための制御を必要としない脚であるので、段差や溝などの障害物との距離を維持する必要がある脚のブレーキは作動された状態となり、ロボットが障害物に衝突することなどが防止される。
【0040】
なお、上述では、階段歩行の際に、中央脚と側脚の両方が接地している状態で本体の姿勢を変化させる時に、いずれかの脚のブレーキを非作動にしたが、本発明はこれに限定されない。例えば、ロボットが所定の作業を行うため、姿勢を変化させる時に、特に、中央脚及び側脚を接地させた状態で姿勢を変化させる時に、複数の脚のうち少なくともいずれかのブレーキを非作動にし、駆動モータ等に発生する大きなトルクを解放できる。
また、上述では、3脚歩行を行う脚車輪型移動ロボットの場合であったが、本発明はこれに限定されず、2脚歩行又は4脚以上で歩行を行う脚車輪型移動ロボットにも適用可能である。
さらに、上述では、脚の設けられた車輪はモータにより駆動されるものであったが、車輪の駆動装置を設けずに車輪を脚先端に取り付けてもよい。
また、上述のブレーキ23は、車輪9の回転を制動する制動装置を構成するが、出力軸が車輪の回転軸と同軸に連結されたモータなどのアクチュエータや他の適切な装置で制動装置を構成してもよい。
このように、本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更することができる。
【図面の簡単な説明】
【0041】
【図1】本発明の実施形態による脚車輪型移動ロボットの正面図である。
【図2】本発明の実施形態による脚車輪型移動ロボットの側面図である。
【図3】脚先端に設けられた車輪及びその駆動機構を示す図である。
【図4】本発明の実施形態による車輪のブレーキを非作動にするタイミングを示す図である。
【図5】従来の脚車輪型移動ロボットを示す正面図である。
【図6】従来の脚車輪型移動ロボットの車輪走行を示す図である。
【図7】従来の脚車輪型移動ロボットの歩行動作を示す図である。
【符号の説明】
【0042】
1 本体
3 中央脚
5 側脚
7、11 関節
9 車輪
10 脚車輪型移動ロボット
12 車輪用の駆動モータ
15 傘歯車
17 駆動シャフト
19 伝達ベルト
21 車輪シャフト
23 ブレーキ
【特許請求の範囲】
【請求項1】
本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、該複数の駆動モータを制御し前記複数の脚に歩行を行わせる制御装置と、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットであって、
前記制御装置は、前記駆動モータを制御し本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する、ことを特徴とする脚車輪型移動ロボット。
【請求項2】
前記複数の脚がそれぞれ対応する前記駆動モータによって回転駆動されるときの各中心軸は、互いに平行な関係にある水平軸であり、
前記複数の脚の車輪が回転するときの各中心軸は、前記水平軸と平行な関係にある回転軸である、ことを特徴とする請求項1に記載の脚車輪型移動ロボット。
【請求項3】
前記制御装置が前記複数の脚の少なくともいずれかの制動装置を非作動にするのは、前記複数の脚を接地させた状態で前記本体の姿勢を変化させる時である、ことを特徴とする請求項1に記載の脚車輪移動ロボット。
【請求項4】
前記制御装置が前記複数の脚の少なくともいずれかの制動装置を非作動にするのは、前記複数の脚が歩行動作を行っている間に、前記複数の脚を接地させた状態で前記本体の姿勢を変化させる時である、ことを特徴とする請求項1に記載の脚車輪移動ロボット。
【請求項5】
前記制御装置が、前記複数の脚を接地させながら前記本体の姿勢を変化させる時に、制動装置を非作動にするのは、外部の障害物からの距離を維持する必要がある脚以外の脚である、ことを特徴とする請求項1乃至4のいずれかに記載の脚車輪型移動ロボット。
【請求項6】
本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットの動作方法であって、
前記駆動モータにより本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する、ことを特徴とする脚車輪型移動ロボットの動作方法。
【請求項7】
本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットの動作プログラムであって、
前記駆動モータにより本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する処理を脚車輪型移動ロボットに組み込まれたコンピュータに実行させることを特徴とする脚車輪型移動ロボットの動作プログラム。
【請求項1】
本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、該複数の駆動モータを制御し前記複数の脚に歩行を行わせる制御装置と、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットであって、
前記制御装置は、前記駆動モータを制御し本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する、ことを特徴とする脚車輪型移動ロボット。
【請求項2】
前記複数の脚がそれぞれ対応する前記駆動モータによって回転駆動されるときの各中心軸は、互いに平行な関係にある水平軸であり、
前記複数の脚の車輪が回転するときの各中心軸は、前記水平軸と平行な関係にある回転軸である、ことを特徴とする請求項1に記載の脚車輪型移動ロボット。
【請求項3】
前記制御装置が前記複数の脚の少なくともいずれかの制動装置を非作動にするのは、前記複数の脚を接地させた状態で前記本体の姿勢を変化させる時である、ことを特徴とする請求項1に記載の脚車輪移動ロボット。
【請求項4】
前記制御装置が前記複数の脚の少なくともいずれかの制動装置を非作動にするのは、前記複数の脚が歩行動作を行っている間に、前記複数の脚を接地させた状態で前記本体の姿勢を変化させる時である、ことを特徴とする請求項1に記載の脚車輪移動ロボット。
【請求項5】
前記制御装置が、前記複数の脚を接地させながら前記本体の姿勢を変化させる時に、制動装置を非作動にするのは、外部の障害物からの距離を維持する必要がある脚以外の脚である、ことを特徴とする請求項1乃至4のいずれかに記載の脚車輪型移動ロボット。
【請求項6】
本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットの動作方法であって、
前記駆動モータにより本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する、ことを特徴とする脚車輪型移動ロボットの動作方法。
【請求項7】
本体と、該本体に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、前記各脚は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボットの動作プログラムであって、
前記駆動モータにより本体の姿勢を変化させる時に、前記複数の脚の少なくともいずれかの制動装置を非作動にし、車輪が回転移動可能となった該脚から、本体の姿勢変化によってロボット内部に蓄積される応力を外部に解放する処理を脚車輪型移動ロボットに組み込まれたコンピュータに実行させることを特徴とする脚車輪型移動ロボットの動作プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−130724(P2007−130724A)
【公開日】平成19年5月31日(2007.5.31)
【国際特許分類】
【出願番号】特願2005−326410(P2005−326410)
【出願日】平成17年11月10日(2005.11.10)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成16年度、独立行政法人新エネルギー・産業技術総合開発機構委託研究、次世代ロボット実用化プロジェクト/プロトタイプ開発支援事業/3脚車輪型移動ロボットの研究開発、産業活力再生特別措置法第30条の適用を受ける特許出願
【出願人】(000000099)石川島播磨重工業株式会社 (5,014)
【Fターム(参考)】
【公開日】平成19年5月31日(2007.5.31)
【国際特許分類】
【出願日】平成17年11月10日(2005.11.10)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成16年度、独立行政法人新エネルギー・産業技術総合開発機構委託研究、次世代ロボット実用化プロジェクト/プロトタイプ開発支援事業/3脚車輪型移動ロボットの研究開発、産業活力再生特別措置法第30条の適用を受ける特許出願
【出願人】(000000099)石川島播磨重工業株式会社 (5,014)
【Fターム(参考)】
[ Back to top ]