
脳活動状態解析装置、リハビリテーション補助装置、思念制御型駆動装置、思念制御型表示装置、測定ポイント選択方法、測定ポイント選択プログラム
【課題】測定ポイントの決定を精度良く行うことが可能な脳活動状態解析装置等を提供すること。
【解決手段】被験者に対して与えられる脳活動上のタスクの状態を検知するタスク状態検知手段と、複数の測定ポイント毎にタスクの状態に対応付けられたデータであって複数の受光手段の測定データに基づく指標値が変動する指標データを生成する指標データ生成手段と、指標データ生成手段により生成された指標データを、指標値とその時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する変換手段と、記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、グループ分けに依存した位相平面上のデータの散らばりに基づき記複数の測定ポイントのそれぞれを評価した評価値を算出する評価値算出手段と、を備える脳活動状態解析装置。
【解決手段】被験者に対して与えられる脳活動上のタスクの状態を検知するタスク状態検知手段と、複数の測定ポイント毎にタスクの状態に対応付けられたデータであって複数の受光手段の測定データに基づく指標値が変動する指標データを生成する指標データ生成手段と、指標データ生成手段により生成された指標データを、指標値とその時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する変換手段と、記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、グループ分けに依存した位相平面上のデータの散らばりに基づき記複数の測定ポイントのそれぞれを評価した評価値を算出する評価値算出手段と、を備える脳活動状態解析装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、NIRS(Near Infra-Red Spectroscopy)を利用して脳の活動を解析する脳活動状態解析装置、及びこれを利用したリハビリテーション補助装置、思念制御型駆動装置、思念制御型表示装置、並びに当該脳活動状態解析装置により利用される測定ポイント選択方法、測定ポイント選択プログラムに関する。
【背景技術】
【0002】
近年、BCI(Brain Computer Interface)についての研究が進められている。BCIとは,人間が脳で考えることを脳神経情報として取り出し,機械に入力することにより機器を制御するシステムである。手足を動かすことなく脳神経情報から直接機器の操作をすることができれば、例えば身体障害者など、体を動かせない患者に対する介護ロボットへの応用などが期待できる。
【0003】
これに関連し、NIRSを用いて脳の活動を測定する技術について研究が進められている。人の血中に含まれるヘモグロビンは、酸素と結合して酸素化ヘモグロビン(oxy−Hb)となったり、酸素と離れて脱酸素化ヘモグロビン(deoxy−Hb)となることにより、血液中で酸素を運搬する役割を果たしている。また、人の脳内では、血流再配分作用によって活性化している部位には酸素供給が行われ、酸素と結合したオキシヘモグロビンの量が増加している。
【0004】
酸素化ヘモグロビンと脱酸素化ヘモグロビンは、可視光から近赤外領域にかけて異なる分光吸収スペクトル特性を有しているので、近赤外光を用いて酸素化ヘモグロビン濃度及び脱酸素化ヘモグロビン濃度を推定することができる。従って、NIRSを人の頭部に装着して測定データを解析することにより、人の脳活動の状態を解析することができる。
【0005】
特許文献1には、送光プローブ(光照射部)と受光プローブ(受光部)が行方向及び列方向に交互となるように正方格子状に配置されたNIRSについて記載されている。近赤外光は、皮膚組織や骨組織を透過し、血液中のオキシヘモグロビン、デオキシヘモグロビンにより吸収される。当文献に記載のように、人の頭部を対象とするNIRSでは、光照射部と受光部の位置をずらしていることが多い。
【0006】
また、特許文献2には、NIRSを利用した脳機能測定装置において、光射出機能と光検出機能を有する生体情報検出用プローブの位置を決定するために、プローブ電極の位置を生体上で移動させ(或いは複数のプローブ電極に順次通電し)、抵抗が極大又は極小となる電気的特異点を探索し、生体情報検出用プローブの位置とすることについて記載されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−64675号公報
【特許文献2】特開2010−246821号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、上記特許文献1に記載されているように、光照射部と受光部が複数存在する場合、光照射手段と受光手段との組み合わせにより、複数の測定ポイントが存在することになる。従って、人の頭部の様々な箇所に相当する測定ポイントのうち、いずれを用いて脳活動を解析するかという問題が生じるが、特許文献1では、このような問題について考慮していない。
【0009】
この点、特許文献2には、抵抗が極大又は極小となる電気的特異点を生体情報検出用プローブの位置とすることについて記載されているものの、係る電気的特異点が、被験者の特定の思念を、最も良く反映した脳活動が行われる箇所であるという保証は無い。
【0010】
本発明はこのような課題を解決するためのものであり、複数の光照射手段と受光手段を備えるNIRSの出力データを用いて脳の活動を解析する際に、測定ポイントの決定を精度良く行うことが可能な脳活動状態解析装置等を提供することを、主たる目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するための本発明の一態様は、
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき前記被験者の脳の活動状態を解析する脳活動状態解析装置であって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知するタスク状態検知手段と、
前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する指標データ生成手段と、
前記指標データ生成手段により生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する変換手段と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存した前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する評価値算出手段と、
を備える脳活動状態解析装置である。
【0012】
この本発明の一態様によれば、複数の光照射手段と受光手段を備えるNIRSの出力データを用いて脳の活動を解析する際に、測定ポイントの決定を精度良く行うことができる。
【発明の効果】
【0013】
本発明によれば、複数の光照射手段と受光手段を備えるNIRSの出力データを用いて脳の活動を解析する際に、測定ポイントの決定を精度良く行うことが可能な脳活動状態解析装置等を提供することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施例に係る脳活動状態解析装置1のハードウエア構成例である。
【図2】本発明の一実施例に係る脳活動状態解析装置1の機能構成例である。
【図3】準備段階の処理を概念的に示す図である。
【図4】被験者に与えられる脳活動上のタスクの状態変化を例示した図である。
【図5】NIRS100の構成を例示した図である。
【図6】入力された[oxy−Hb]からノイズ除去後のデータ[oxy−Hb*]を得る様子を示す図である。
【図7】指標値(oxy−Hb*)と微分値d(oxy−Hb*)/dtの時間変化を示す図である。
【図8】指標値(oxy−Hb*)と、その微分値d(oxy−Hb*)/dtを位相平面上に展開したデータを示す図である。
【図9】異なる測定ポイントによる測定データから得られた、位相平面上に展開したデータを並べて示す図である。
【図10】グループ内分散σ2Wを概念的に示す図である。
【図11】グループ間分散σ2Bを概念的に示す図である。
【図12】分散度Jσを概念的に示す図である。
【図13】本作動段階の処理を概念的に示す図である。
【図14】従来の単純な閾値に基づく判定原理を例示した図である。
【図15】本実施例の脳活動状態解析装置1判定原理を示す図である。
【図16】本作動段階の推定精度を確認するための実験結果を示す図である。
【図17】脳活動状態解析装置1を利用したリハビリテーション補助装置300の構成例である。
【図18】脳活動状態解析装置1を利用した思念制御型駆動装置400の構成例である。
【図19】脳活動状態解析装置1を利用した思念制御型表示装置500の構成例である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態について、添付図面を参照しながら実施例を挙げて説明する。
【実施例】
【0016】
以下、図面を参照し、本発明の一実施例に係る脳活動状態解析装置、測定ポイント選択方法、測定ポイント選択プログラム、並びにこれらの利用例であるリハビリテーション補助装置、思念制御型駆動装置、思念制御型表示装置について説明する。
【0017】
<脳活動状態解析装置>
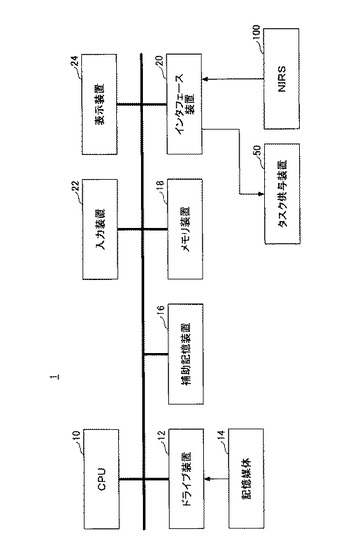
図1は、本発明の一実施例に係る脳活動状態解析装置1のハードウエア構成例である。図示するように、脳活動状態解析装置1は、タスク供与装置50及びNIRS100に接続されて使用されるコンピュータであり、例えば、CPU(Central Processing Unit)10と、ドライブ装置12と、補助記憶装置16と、メモリ装置18と、インタフェース装置20と、入力装置22と、表示装置24と、を備える。これらの構成要素は、バスやシリアル回線等を介して接続されている。
【0018】
CPU10は、例えば、プログラムカウンタや命令デコーダ、各種演算器、LSU(Load Store Unit)、汎用レジスタ等を有するプロセッサである。ドライブ装置12は、記憶媒体14からプログラムやデータを読み込み可能な装置である。プログラムを記録した記録媒体14がドライブ装置12に装着されると、プログラムが記録媒体14からドライブ装置12を介して補助記憶装置16にインストールされる。記録媒体14は、例えば、CD−ROM、DVDディスク、USBメモリ等の可搬型の記録媒体である。また、補助記憶装置16は、例えば、HDD(Hard Disk Drive)やフラッシュメモリである。
【0019】
プログラムのインストールは、上記のように記憶媒体14を用いる他、インタフェース装置20がネットワークを介して他のコンピュータよりダウンロードし、補助記憶装置16にインストールすることによって行うこともできる。また、脳活動状態解析装置1の出荷時に、予め補助記憶装置16やROM(Read Only Memory)等に格納されていてもよい。このようにしてインストール又は予め格納されたプログラムをCPU10が実行することにより、図1に示す態様の情報処理装置が、本実施例の脳活動状態解析装置1として機能することができる。
【0020】
メモリ装置18は、例えば、RAM(Random Access Memory)やEEPROM(Electrically Erasable and Programmable Read Only Memory)である。インタフェース装置20は、上記ネットワークとの接続等を制御する。入力装置22は、例えば、キーボードやマウス、タッチパッド、タッチパネル、マイク等である。また、表示装置24は、例えば、LCD(Liquid Crystal Display)やCRT(Cathode Ray Tube)等の表示装置である。
【0021】
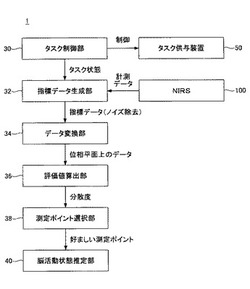
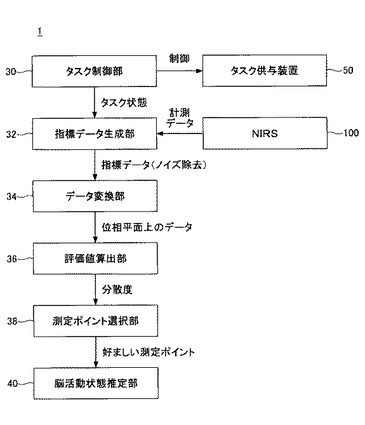
また、図2は、本発明の一実施例に係る脳活動状態解析装置1の機能構成例である。脳活動状態解析装置1は、タスク制御部30と、指標データ生成部32と、データ変換部34と、評価値算出部36と、測定ポイント選択部38と、脳活動状態推定部40と、を備える。
【0022】
これらの機能ブロックは、補助記憶装置16等に格納されたプログラム・ソフトウエアをCPU10が実行することにより機能する。なお、各機能ブロックが明確に別のプログラムにより実現される必要はなく、いずれかの機能ブロックが、サブルーチン等で他の機能ブロックにより呼び出されるものであっても構わない。また、このようなソフトウエアブロックに限らず、IC(Integrated Circuit)やFPGA(Field Programmable Gate Array)等のハードウエアによって、これらの機能ブロックのうち一部が実現されてもよい。
【0023】
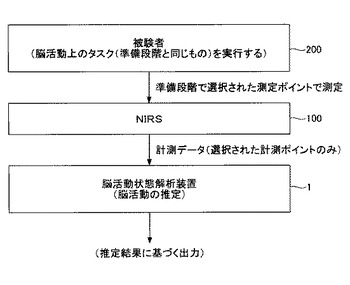
なお、本実施例の脳活動状態解析装置1は、最適な測定ポイントを決定するための準備段階と、決定された測定ポイントを利用して被験者の脳活動を推定する本作動段階に分けて機能する。従って、まず、準備段階の制御について説明し、次に本作動段階の制御について説明する。上記各機能ブロックのうちタスク制御部30〜測定ポイント選択部38が準備段階で機能し、脳活動状態推定部40は本作動段階で機能する。
【0024】
〔準備段階〕
図3は、準備段階の処理を概念的に示す図である。まず、タスク供与装置50及びNIRS100について説明する。
【0025】
タスク供与装置50は、被験者に対して、脳活動上のタスクを与えるための装置である。「脳活動上のタスク」とは、例えば「ある一定期間、右手を握ろうと考える」という思念上のタスク(課題)である。このタスクの内容については、予め被験者に説明されており、タスク供与装置50は、上記「一定期間」の開始と終了を被験者に知らせるための装置である。従って、タスク供与装置50としては、「一定期間」の開始時から終了時の間まで(逆でもよい)発光する発光装置の他、同様の動作をする表示装置、発音装置(スピーカ、ブザー)、振動装置(バイブレータ)等が考えられる。
【0026】
タスク供与装置50は、タスク制御部30によって制御される。タスク制御部30は、例えば、レスト期間(何も思念せずに休憩する期間)10秒、タスク期間(右手を握ろうと考える期間)30秒、レスト期間10秒を1セットとして、複数セットを繰り返すように、タスク供与装置50を制御する。図4は、被験者に与えられる脳活動上のタスクの状態変化を例示した図である。
【0027】
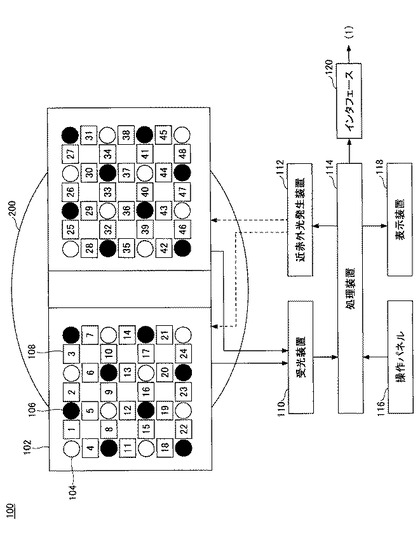
図5は、NIRS100の構成を例示した図である。NIRS100は、被験者200の頭部に被せられるホルダ102と、複数の送光ファイバ104と、複数の検出ファイバ106と、受光装置110と、近赤外光発生装置112と、処理装置114と、を備える。
【0028】
ホルダ102には、複数の送光ファイバ104及び複数の検出ファイバ106の先端が装着される。ホルダ102は、被験者200の頭部に被せられることにより、複数の送光ファイバ104及び複数の検出ファイバ106の先端を被験者200の頭部に密着させる。
【0029】
図示するように、送光ファイバ104と検出ファイバ106は、行方向及び列方向に交互となるように正方格子状に配置される。送光ファイバ104の他端には、近赤外光発生装置112が接続され、近赤外光発生装置112から近赤外光が供給される。送光ファイバ104は、近赤外光発生装置112により供給された近赤外光を被験者側の先端から送出し、被験者200の頭部に照射する。送光ファイバ104から送出された近赤外光は、被験者200の頭部内に入射する。被験者200の頭部内に入射した近赤外光は、検出ファイバ106の先端に入射して受光装置110に入力される。受光装置110は、検出ファイバ106から供給される近赤外光を電気信号に変換して処理装置114に出力する。
【0030】
処理装置114は、受光装置110から入力された電気信号を解析し、酸素化ヘモグロビン(oxy−Hb)と脱酸素化ヘモグロビン(deoxy−Hb)の濃度を測定する。処理装置には、操作パネル116、表示装置118が取り付けられており、種々の操作及び状態表示が可能となっている。また、処理装置114により測定された酸素化ヘモグロビンと脱酸素化ヘモグロビンの濃度は、インタフェース120を介して脳活動状態解析装置1に出力される。
【0031】
ここで、被験者200の頭部において酸素化ヘモグロビンの濃度等が測定された箇所(図中、□で示す複数の測定ポイント108)は、送光ファイバ104と検出ファイバ106の中点と仮想的に見なすことができる。送光ファイバ104と検出ファイバ106は複数存在するため、測定ポイント108も複数存在することになる。図5における□内の数字(1〜48)は、測定ポイント108の識別ナンバーである。
【0032】
NIRS100は、こうした複数の測定ポイント108のそれぞれについての酸素化ヘモグロビンの濃度等を、同時に又は順次測定し、測定ポイント108に付随するリアルタイムデータとして脳活動状態解析装置1に出力する。なお、NIRS100の態様は上記説明したものに限らず、如何なる態様であってもよい。
【0033】
以下、上記各機能ブロックについて説明する。また、NIRS100から入力される各時点の酸素化ヘモグロビンの濃度を、(oxy−Hb)と表記する。また、(oxy−Hb)が時刻に応じて変動する時系列データを[oxy−Hb]と表記する。
【0034】
タスク制御部30は、上記のようにタスク供与装置50に指示すると共に、レスト期間とタスク期間の切り替わりのタイミング及びどちらの期間に切り替わったかを、指標データ生成部32に通知する。
【0035】
指標データ生成部32は、NIRS100から入力された[oxy−Hb]に対してノイズ除去処理を行い、ノイズ除去後のデータ[oxy−Hb*](特許請求の範囲における「指標データ」に相当する)を生成する。ノイズ除去処理は、例えば離散ウェーブレット変換による多重解像度解析によって行われる。
【0036】
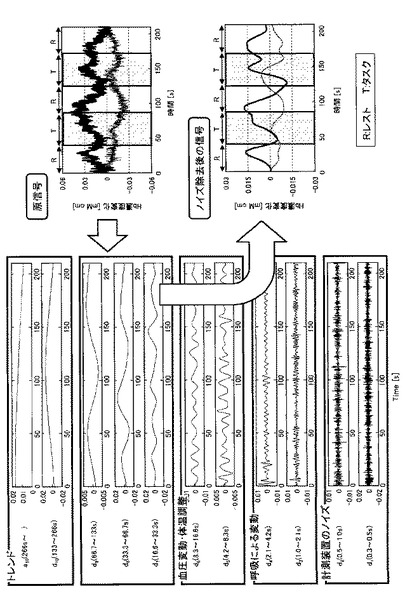
図6は、入力された[oxy−Hb]からノイズ除去後のデータ[oxy−Hb*]を得る様子を示す図である。図中、右上の信号がNIRS100から入力された[oxy−Hb](原信号)である。また、左側の各図は、[oxy−Hb]を周波数別に10段階に分解したデータ(d1〜d10)を示している。図中、括弧内の数値は周期を示す。周期が最も短いd1、d2は、NIRS100のノイズを示し、d3、d4は、呼吸による影響と考えられる。また、d5、d6は、血圧変動・体温調整による影響などが含まれていると考えられる。指標データ生成部32は、例えば、タスクとレストの周期が50秒であるため、それと同様の周期を有するd8と、その前後のd7、d9を必要なデータとして扱い、更に長い周期のd10はトレンド成分として無視できるものとする。そして、d7〜d9に対して加重和を求めたり、加算を行ったりすることにより、ノイズ除去後のデータ[oxy−Hb*]を生成する。なお、離散ウェーブレット変換による多重解像度解析については、<特願2005−244370/特開2007−54376>において、より詳細に説明されている。
【0037】
ノイズ除去後のデータ[oxy−Hb*]は、指標値(oxy−Hb*)が変動するリアルタイムデータとして逐次データ変換部34に供給され、或いは一定期間のデータセット[oxy−Hb*]としてメモリ装置18に格納される。また、指標値(oxy−Hb*)には、時刻に応じて変動する値であると共に、タスク制御部30から入力されたデータに基づき判別されるタスクの状態が付与されている。すなわち、指標値(oxy−Hb*)には、NIRS100により計測された時刻において、タスクの状態がレストであったか、タスクであったかを判別するための情報が付与されている。
【0038】
なお、ノイズ除去処理として離散ウェーブレット変換による多重解像度解析を採用するのはあくまで一例であり、移動平均を求める等、他の手法を用いても構わない。また、精度上の問題は生じるが、「指標データ」はノイズ除去を行わない生データ[oxy−Hb]であっても構わない(この場合、指標データ生成部32は、NIRS100から入力された(oxy−Hb)をそのままメモリ装置18に格納したり、データ変換部34に供給したりする)。
【0039】
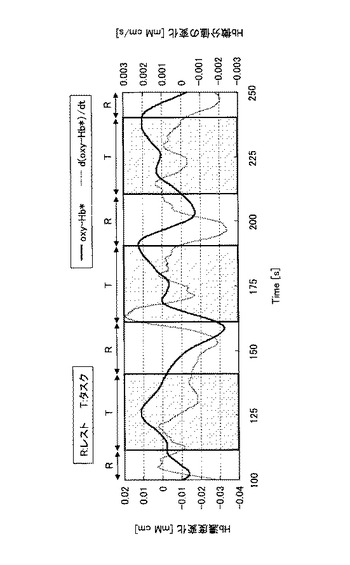
データ変換部34はまず、指標データ生成部32により生成されたノイズ除去後の指標値(oxy−Hb*)の時間微分値d(oxy−Hb*)/dtを求める(以下、単に微分値と表記する)。図7は、指標値(oxy−Hb*)と微分値d(oxy−Hb*)/dtの時間変化を示す図である。図中、実線は指標値(oxy−Hb*)の時間変化を示し、破線は微分値d(oxy−Hb*)/dtの時間変化を示している。
【0040】
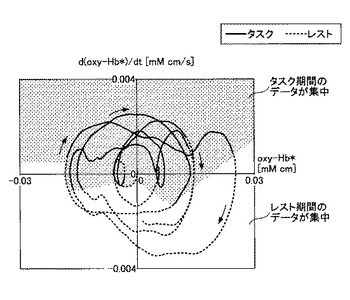
データ変換部34は、更に、指標値(oxy−Hb*)と、その微分値d(oxy−Hb*)/dtを二軸とする位相平面上に、指標値(oxy−Hb*)と微分値d(oxy−Hb*)/dtを成分とする各座標をプロットする。プロットされる各座標には、タスクの状態が付与されている。図8は、指標値(oxy−Hb*)と、その微分値d(oxy−Hb*)/dtを位相平面上に展開したデータを示す図である。図中、矢印は、指標値(oxy−Hb*)に対応する元データ(oxy−Hb)が測定された時刻の推移を示している。また、図中、実線はタスク期間に測定された(oxy−Hb)に相当する座標の軌跡であることを示し、破線はレスト期間に測定された(oxy−Hb)に相当する座標の軌跡であることを示している。このように、指標値(oxy−Hb*)と、その微分値d(oxy−Hb*)/dtを二軸とする位相平面上では、タスク期間に相当する座標と、レスト期間に相当する座標は、それぞれが、ある程度のまとまりをもって出現する傾向を示す。大まかにいうと、タスク期間に相当する座標は、位相平面における上半分の領域((oxy−Hb*)が高い領域)に出現し、レスト期間に相当する座標は、位相平面における下半分の領域((oxy−Hb*)が低い領域)に出現する傾向を示す。
【0041】
ここで、前述のように、位相平面上に展開されたデータは、複数の測定ポイント毎に得られたデータに基づいている。従って、複数の測定ポイント毎に、位相平面上に展開されたデータが存在することになる。
【0042】
ここで、測定ポイントは、被験者200の頭部の異なる箇所に該当するものである。各測定ポイントにおける実際の脳活動は、被験者200によって異なるものであるし、被験者200の頭蓋骨の厚さや髪の生え具合等によって測定強度も異なるものである。従って、与えたタスクの種類(本実施例では「右手を握ろうと考える」)に応じて、どの箇所で最も脳活動が鮮明に現れるか、また測定が容易であるかは、被験者200によって様々である。
【0043】
そこで、評価値算出部36は、対象となる被験者200について、与えたタスクに応じて最も測定に適した測定ポイントを選択するために、測定ポイントの適合性を評価した評価値を算出する。
【0044】
本実施例では、図8に示した位相平面上に展開したデータにおいて、タスク期間に相当する座標の軌跡と、レスト期間に相当する座標の軌跡が明確に分離している測定ポイントを、好ましい測定ポイントとして高い評価を与える。後述するように本実施例の脳活動状態解析装置1は、本作動段階において、位相平面上に展開した入力データの位置によって被験者200の脳活動状態を推定するからである。
【0045】
図9は、異なる測定ポイントによる測定データから得られた、位相平面上に展開したデータを並べて示す図である。図9(A)のデータは、タスク期間に相当する座標の軌跡と、レスト期間に相当する座標の軌跡が明確に分離しているため、好ましい測定ポイントによるものである。一方、図9(B)のデータは、タスク期間に相当する座標の軌跡と、レスト期間に相当する座標の軌跡が混在して判別しにくいため、好ましくない測定ポイントによるものである。
【0046】
評価値算出部36は、上記説明したような明確に分離していることを示す評価値として、位相平面上の座標群におけるグループ内分散σ2Wで、グループ間分散σ2Bを除算して分散度Jσを算出する(次式(1))参照)。ここで、グループは、タスク期間とレスト期間のいずれに測定されたデータによるものであるか、によって決定される。なお、「何回目の」タスク期間/レスト期間であるか、については考慮しない。
【0047】
Jσ=σ2B/σ2W …(1)。
【0048】
グループ内分散σ2Wとは、位相平面上における、タスク期間とレスト期間のそれぞれのグループに属する座標群内の分散であり、次式(2)で表される。式中、nは総座標数であり、iはグループ(タスク期間/レスト期間)を示す識別子であり、cはグループ数(本実施例では2)である。また、xkは順番にサンプリングされる座標であり、niは各グループに属する座標数であり、miはグループ内の全座標の重心である。式(2)から分かるように、グループ内分散σ2Wは、グループ内のデータの散らばりを表す値である。グループ内分散σ2Wが小さい程、同じ傾向を有する座標群の特徴が精度よく表れていると考えられる。図10は、グループ内分散σ2Wを概念的に示す図である。
【0049】
【数1】

【0050】
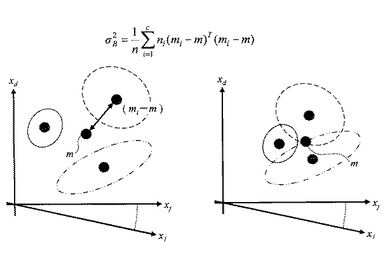
一方、グループ間分散σ2Bとは、位相平面上における、タスク期間のグループとレスト期間のグループとの分散であり、次式(3)で表される。式中、mはグループを問わない全ての座標の重心である。式(3)から分かるように、グループ間分散σ2Bは、グループ同士の散らばり(距離)を表す値である。グループ間分散σ2Bが大きい程、異なる傾向を有する座標群が明確に分離していることになる。図11は、グループ間分散σ2Bを概念的に示す図である。
【0051】
【数2】
【0052】
これらより、グループ内分散σ2Wが小さい程、そしてグループ間分散σ2Bが大きい程、例えばタスク期間とレスト期間の座標群が明確に分離し、且つそれぞれがまとまっているため、好ましい座標群である(好ましい測定ポイントである)と判断できる。評価値算出部36は、係る原理に従い、上式(1)に基づき分散度Jσを算出する。これによって、被験者200に与えた脳活動上のタスクに応じた測定ポイントの決定を、精度良く行うことができる。図12は、分散度Jσを概念的に示す図である。
【0053】
なお、本出願人の発明者は、図9の軌跡を生成した各データに対して分散度Jσを算出したところ、図9(A)のデータについては、Jσ=1.2397という結果を、図9(B)のデータについては、Jσ=0.0020という結果を得た。これによって、タスク期間に対応する座標の軌跡とレスト期間に対応する座標の軌跡が、それぞれまとまって観測される測定ポイントは、高い分散度Jσを示すことが分かる。従って、このような分散度Jσは位相平面上の座標群の評価に有効である。
【0054】
なお、評価値算出部36が算出する評価値は、上式(1)で示される分散度Jσを採用することが好ましいが、次式(4)〜(6)で示されるように、分散度Jσと同様の性質を示す値であれば、これらを採用しても構わない。また、式(4)の各項に係数を乗じる等、適合性向上のための変形等は許容される。
【0055】
(評価値*)=σ2B−σ2W …(4)
(評価値**)=σ2B …(5)
(評価値***)=1/σ2W …(6)
【0056】
測定ポイント選択部38は、評価値算出部36により算出された分散度Jσに基づき、好ましい測定ポイントを選択する。具体的には、単に分散度Jσが最も高い測定ポイントを選択してもよいし、分散度Jσに加えて他の条件を反映させて測定ポイントを選択してもよい。係る処理によって、好ましい測定ポイントを、迅速に且つ自動的に決定することができる。
【0057】
また、測定ポイント選択部38は、一の測定ポイントを選択するだけでなく、複数の測定ポイントを選択してもよい。この場合、後述する本作動段階では、複数の測定ポイントによるデータを反映させた関数等を用いて被験者200の脳活動状態を推定する。
【0058】
また、上記のように自動的に測定ポイントを選択するのに限らず、表示装置24等により測定ポイント毎の分散度Jσをユーザに提示し、ユーザが入力装置22を用いて測定ポイントを選択する処理を行ってもよい(ユーザの選択を受け付ける)。
【0059】
以上説明した準備段階の処理により、被験者200に与えた脳活動上のタスクに応じた測定ポイントの決定を、精度良く行うことができる。
【0060】
〔本作動段階〕
以下、準備段階において選択された測定ポイントを用いて行われる本作動段階の処理について説明する。図13は、本作動段階の処理を概念的に示す図である。
【0061】
本作動段階では、タスク供与装置50による脳活動上のタスクの供与は行われず、準備段階と同じ被験者200が、準備段階で供与された脳活動上のタスクと同じこと(「右手を握ろうと考える」)を思念する。
【0062】
脳活動状態推定部40は、被験者200が上記思念を行った前後において、準備段階で選択された測定ポイントにおいて測定されたデータを解析し、被験者200が上記思念を行った期間を推定する。
【0063】
係る推定処理によって被験者200が特定の脳活動を行ったことを推定可能であると、その推定結果を様々な用途に利用することができる。詳しくは後述するが、例えば右手が十分に動かない被験者200に対しては、右手を握ろうと考えたタイミングと同期して右手を握る筋肉に筋刺激を与えることにより、効果的なリハビリテーションの補助を行うことができる。また、ロボットアーム等を思念により操縦することもできる。特に右手が不自由な被験者200の場合、電動式・油圧式等の可動式義手の操作を思念により行うこともできる。また、ゲーム機器等において、思念によってキャラクターの移動操作等を行うこともできる。
【0064】
脳活動状態推定部40は、具体的には、パーセプトロンというパターン認知法に基づき脳活動状態の推定を行う。
【0065】
まず、測定ポイントにおいて測定されたデータ(oxy−Hb)に対しては、指標データ生成部32によりノイズ除去処理が行われ、(oxy−Hb*)が生成される。そして、データ変換部34により、(oxy−Hb*)が位相平面上のデータに変換される。
【0066】
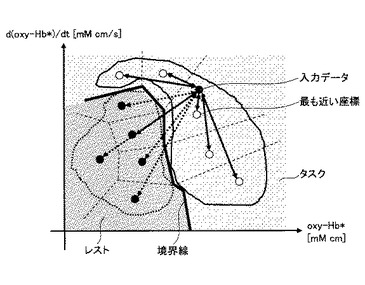
脳活動状態推定部40は、位相平面上のデータ(以下、係る位相平面上の座標データを入力データと称する)に対して、準備段階で位相平面上にプロットされた各座標のうち、最も距離が小さい座標を抽出する。そして、抽出した座標がいずれのグループに属するか(タスク期間か、レスト期間か)によって、被験者200が思念を行ったタイミングであるか否かを判定する。
【0067】
ここで、脳活動状態推定部40は、入力データと、準備段階で位相平面上にプロットされた各座標との距離を判定する際に、以下の識別関数g(x)を用いる(次式(7)参照)。式中、xは入力データの座標であり、xiは位相平面上の各座標である。式から分かるように、識別関数g(x)は、通常のベクトル間距離からxの二乗の項を除外している。xの二乗の項は、入力データが一定であれば変化しないため、最小距離を求める問題においては無視できるからである。
【0068】
【数3】
【0069】
このような手法により、従来の単純な閾値に基づく判定よりも、高精度に被験者200の脳活動状態を推定することができる。図14は、従来の単純な閾値に基づく判定原理を例示した図である。図示するように、従来の単純な閾値に基づく判定では、準備段階で計測された(oxy−Hb)の最大値に対して閾値を設定し、境界判定をおこなっていた。
【0070】
これに対し、本実施例の脳活動状態解析装置1では、上記のような判定を行うため、どのような複雑な決定境界でも近似的に表現することができ、より被験者200の脳活動傾向に即した判定を行うことができる。この結果、被験者200の脳活動状態を、より高精度に推定することができる。図15は、本実施例の脳活動状態解析装置1の判定原理を示す図である。
【0071】
なお、被験者200に供与されるタスクは、一種類に限定される必要は無く、複数種類のタスクが供与されてもよい。この場合、「グループ」は複数種類となるが、上式(1)〜(3)等は、元々複数種類のタスクに対応しているため、そのまま用いることができる。
【0072】
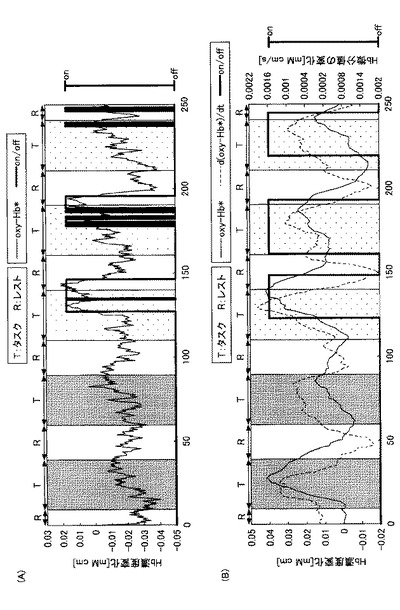
なお、本出願人の発明者は、準備段階と本作動段階を連続して行い、準備段階と本作動段階を通じて同じような周期で「右手を握ろうと考える」が、本作動段階では、タスク制御部30からの情報を用いずに脳活動状態の推定を行うという実験を行った。図16は、本作動段階の推定精度を確認するための実験結果を示す図である。図16(A)は、比較対象となる手法(移動平均処理を施し、準備段階で計測された(oxy−Hb)の最大値の20%を閾値として、閾値を上回った場合にonと判定する)による推定結果である。一方、図16(B)は本実施例の手法による推定結果である。図示するように、比較対象となる手法では、被験者200が右手を握ろうと考えた期間と、脳活動状態がタスク側であると推定された期間(on期間)が必ずしも一致しなかったが、本実施例の脳活動状態解析装置1では、これが高確率で一致することが確かめられた。
【0073】
〔まとめ〕
以上説明した本実施例の脳活動状態解析装置1によれば、準備段階では、位相平面上に展開したデータに対して、タスクの状態によるグループ分けに依存したデータの散らばりに基づいて測定ポイントを評価するため、被験者200に与えた脳活動上のタスクに応じた測定ポイントの決定を、精度良く行うことができる。
【0074】
また、本作動段階では、入力データに対して、準備段階で位相平面上にプロットされた各座標のうち、最も距離が小さい座標の属するグループに応じて被験者200の脳活動を推定するため、被験者200の脳活動状態を、より高精度に推定することができる。
【0075】
<利用例>
以下、本実施例の脳活動状態解析装置1の利用例について簡単に説明する。
【0076】
〔リハビリテーション補助装置〕
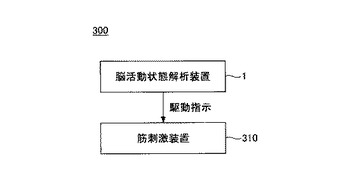
図17は、脳活動状態解析装置1を利用したリハビリテーション補助装置300の構成例である。リハビリテーション補助装置300は、筋刺激装置310を備える。筋刺激装置310は、周知の低周波治療器等が用いられ、タスクとして供与された脳活動において、動かそうとする体の箇所に対応した筋肉に取り付けられる。そして、脳活動状態解析装置1は、被験者200が特定の脳活動状態に在ると判定した期間において、筋刺激装置310に駆動信号を送出する。これによって、被験者200が例えば「右手を握ろう」と考えたタイミングで右手の筋肉が刺激され、リハビリテーション効果が得られる。
【0077】
〔思念制御型駆動装置〕
図18は、脳活動状態解析装置1を利用した思念制御型駆動装置400の構成例である。思念制御型駆動装置400は、アクチュエータ410を備える。アクチュエータ410の態様は如何なるものであってもよいが、例えばロボットアーム、電動式・油圧式等の可動式義手等が考えられる。この場合、脳活動状態解析装置1は、被験者200が特定の脳活動状態に在ると判定した期間において、アクチュエータ410に駆動信号を送出する。これによって、被験者200が例えば「右手で何かをつかむ」と考えたタイミングで、アクチュエータ410が対象物をつかむといった制御が可能となる。
【0078】
〔思念制御型表示装置〕
図19は、脳活動状態解析装置1を利用した思念制御型表示装置500の構成例である。思念制御型表示装置500は、表示装置510を備える。思念制御型表示装置500は、例えばゲーム機等のバーチャル機器に好適に用いられる。この場合、脳活動状態解析装置1は、被験者200が特定の脳活動状態に在ると判定した期間において、表示装置510に特定表示を行うように指示信号を送出する。これによって、被験者200が例えば「前に進む」と考えたタイミングで、画面上のキャラクターが前に進むといった制御が可能となる。
【0079】
以上、本発明を実施するための最良の形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
【符号の説明】
【0080】
1 脳活動状態解析装置
30 タスク制御部
32 指標データ生成部
34 データ変換部
36 評価値算出部
38 測定ポイント選択部
40 脳活動状態推定部
50 タスク供与装置
100 NIRS
300 リハビリテーション補助装置
400 思念制御型駆動装置
500 思念制御型表示装置
【技術分野】
【0001】
本発明は、NIRS(Near Infra-Red Spectroscopy)を利用して脳の活動を解析する脳活動状態解析装置、及びこれを利用したリハビリテーション補助装置、思念制御型駆動装置、思念制御型表示装置、並びに当該脳活動状態解析装置により利用される測定ポイント選択方法、測定ポイント選択プログラムに関する。
【背景技術】
【0002】
近年、BCI(Brain Computer Interface)についての研究が進められている。BCIとは,人間が脳で考えることを脳神経情報として取り出し,機械に入力することにより機器を制御するシステムである。手足を動かすことなく脳神経情報から直接機器の操作をすることができれば、例えば身体障害者など、体を動かせない患者に対する介護ロボットへの応用などが期待できる。
【0003】
これに関連し、NIRSを用いて脳の活動を測定する技術について研究が進められている。人の血中に含まれるヘモグロビンは、酸素と結合して酸素化ヘモグロビン(oxy−Hb)となったり、酸素と離れて脱酸素化ヘモグロビン(deoxy−Hb)となることにより、血液中で酸素を運搬する役割を果たしている。また、人の脳内では、血流再配分作用によって活性化している部位には酸素供給が行われ、酸素と結合したオキシヘモグロビンの量が増加している。
【0004】
酸素化ヘモグロビンと脱酸素化ヘモグロビンは、可視光から近赤外領域にかけて異なる分光吸収スペクトル特性を有しているので、近赤外光を用いて酸素化ヘモグロビン濃度及び脱酸素化ヘモグロビン濃度を推定することができる。従って、NIRSを人の頭部に装着して測定データを解析することにより、人の脳活動の状態を解析することができる。
【0005】
特許文献1には、送光プローブ(光照射部)と受光プローブ(受光部)が行方向及び列方向に交互となるように正方格子状に配置されたNIRSについて記載されている。近赤外光は、皮膚組織や骨組織を透過し、血液中のオキシヘモグロビン、デオキシヘモグロビンにより吸収される。当文献に記載のように、人の頭部を対象とするNIRSでは、光照射部と受光部の位置をずらしていることが多い。
【0006】
また、特許文献2には、NIRSを利用した脳機能測定装置において、光射出機能と光検出機能を有する生体情報検出用プローブの位置を決定するために、プローブ電極の位置を生体上で移動させ(或いは複数のプローブ電極に順次通電し)、抵抗が極大又は極小となる電気的特異点を探索し、生体情報検出用プローブの位置とすることについて記載されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−64675号公報
【特許文献2】特開2010−246821号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、上記特許文献1に記載されているように、光照射部と受光部が複数存在する場合、光照射手段と受光手段との組み合わせにより、複数の測定ポイントが存在することになる。従って、人の頭部の様々な箇所に相当する測定ポイントのうち、いずれを用いて脳活動を解析するかという問題が生じるが、特許文献1では、このような問題について考慮していない。
【0009】
この点、特許文献2には、抵抗が極大又は極小となる電気的特異点を生体情報検出用プローブの位置とすることについて記載されているものの、係る電気的特異点が、被験者の特定の思念を、最も良く反映した脳活動が行われる箇所であるという保証は無い。
【0010】
本発明はこのような課題を解決するためのものであり、複数の光照射手段と受光手段を備えるNIRSの出力データを用いて脳の活動を解析する際に、測定ポイントの決定を精度良く行うことが可能な脳活動状態解析装置等を提供することを、主たる目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するための本発明の一態様は、
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき前記被験者の脳の活動状態を解析する脳活動状態解析装置であって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知するタスク状態検知手段と、
前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する指標データ生成手段と、
前記指標データ生成手段により生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する変換手段と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存した前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する評価値算出手段と、
を備える脳活動状態解析装置である。
【0012】
この本発明の一態様によれば、複数の光照射手段と受光手段を備えるNIRSの出力データを用いて脳の活動を解析する際に、測定ポイントの決定を精度良く行うことができる。
【発明の効果】
【0013】
本発明によれば、複数の光照射手段と受光手段を備えるNIRSの出力データを用いて脳の活動を解析する際に、測定ポイントの決定を精度良く行うことが可能な脳活動状態解析装置等を提供することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施例に係る脳活動状態解析装置1のハードウエア構成例である。
【図2】本発明の一実施例に係る脳活動状態解析装置1の機能構成例である。
【図3】準備段階の処理を概念的に示す図である。
【図4】被験者に与えられる脳活動上のタスクの状態変化を例示した図である。
【図5】NIRS100の構成を例示した図である。
【図6】入力された[oxy−Hb]からノイズ除去後のデータ[oxy−Hb*]を得る様子を示す図である。
【図7】指標値(oxy−Hb*)と微分値d(oxy−Hb*)/dtの時間変化を示す図である。
【図8】指標値(oxy−Hb*)と、その微分値d(oxy−Hb*)/dtを位相平面上に展開したデータを示す図である。
【図9】異なる測定ポイントによる測定データから得られた、位相平面上に展開したデータを並べて示す図である。
【図10】グループ内分散σ2Wを概念的に示す図である。
【図11】グループ間分散σ2Bを概念的に示す図である。
【図12】分散度Jσを概念的に示す図である。
【図13】本作動段階の処理を概念的に示す図である。
【図14】従来の単純な閾値に基づく判定原理を例示した図である。
【図15】本実施例の脳活動状態解析装置1判定原理を示す図である。
【図16】本作動段階の推定精度を確認するための実験結果を示す図である。
【図17】脳活動状態解析装置1を利用したリハビリテーション補助装置300の構成例である。
【図18】脳活動状態解析装置1を利用した思念制御型駆動装置400の構成例である。
【図19】脳活動状態解析装置1を利用した思念制御型表示装置500の構成例である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態について、添付図面を参照しながら実施例を挙げて説明する。
【実施例】
【0016】
以下、図面を参照し、本発明の一実施例に係る脳活動状態解析装置、測定ポイント選択方法、測定ポイント選択プログラム、並びにこれらの利用例であるリハビリテーション補助装置、思念制御型駆動装置、思念制御型表示装置について説明する。
【0017】
<脳活動状態解析装置>
図1は、本発明の一実施例に係る脳活動状態解析装置1のハードウエア構成例である。図示するように、脳活動状態解析装置1は、タスク供与装置50及びNIRS100に接続されて使用されるコンピュータであり、例えば、CPU(Central Processing Unit)10と、ドライブ装置12と、補助記憶装置16と、メモリ装置18と、インタフェース装置20と、入力装置22と、表示装置24と、を備える。これらの構成要素は、バスやシリアル回線等を介して接続されている。
【0018】
CPU10は、例えば、プログラムカウンタや命令デコーダ、各種演算器、LSU(Load Store Unit)、汎用レジスタ等を有するプロセッサである。ドライブ装置12は、記憶媒体14からプログラムやデータを読み込み可能な装置である。プログラムを記録した記録媒体14がドライブ装置12に装着されると、プログラムが記録媒体14からドライブ装置12を介して補助記憶装置16にインストールされる。記録媒体14は、例えば、CD−ROM、DVDディスク、USBメモリ等の可搬型の記録媒体である。また、補助記憶装置16は、例えば、HDD(Hard Disk Drive)やフラッシュメモリである。
【0019】
プログラムのインストールは、上記のように記憶媒体14を用いる他、インタフェース装置20がネットワークを介して他のコンピュータよりダウンロードし、補助記憶装置16にインストールすることによって行うこともできる。また、脳活動状態解析装置1の出荷時に、予め補助記憶装置16やROM(Read Only Memory)等に格納されていてもよい。このようにしてインストール又は予め格納されたプログラムをCPU10が実行することにより、図1に示す態様の情報処理装置が、本実施例の脳活動状態解析装置1として機能することができる。
【0020】
メモリ装置18は、例えば、RAM(Random Access Memory)やEEPROM(Electrically Erasable and Programmable Read Only Memory)である。インタフェース装置20は、上記ネットワークとの接続等を制御する。入力装置22は、例えば、キーボードやマウス、タッチパッド、タッチパネル、マイク等である。また、表示装置24は、例えば、LCD(Liquid Crystal Display)やCRT(Cathode Ray Tube)等の表示装置である。
【0021】
また、図2は、本発明の一実施例に係る脳活動状態解析装置1の機能構成例である。脳活動状態解析装置1は、タスク制御部30と、指標データ生成部32と、データ変換部34と、評価値算出部36と、測定ポイント選択部38と、脳活動状態推定部40と、を備える。
【0022】
これらの機能ブロックは、補助記憶装置16等に格納されたプログラム・ソフトウエアをCPU10が実行することにより機能する。なお、各機能ブロックが明確に別のプログラムにより実現される必要はなく、いずれかの機能ブロックが、サブルーチン等で他の機能ブロックにより呼び出されるものであっても構わない。また、このようなソフトウエアブロックに限らず、IC(Integrated Circuit)やFPGA(Field Programmable Gate Array)等のハードウエアによって、これらの機能ブロックのうち一部が実現されてもよい。
【0023】
なお、本実施例の脳活動状態解析装置1は、最適な測定ポイントを決定するための準備段階と、決定された測定ポイントを利用して被験者の脳活動を推定する本作動段階に分けて機能する。従って、まず、準備段階の制御について説明し、次に本作動段階の制御について説明する。上記各機能ブロックのうちタスク制御部30〜測定ポイント選択部38が準備段階で機能し、脳活動状態推定部40は本作動段階で機能する。
【0024】
〔準備段階〕
図3は、準備段階の処理を概念的に示す図である。まず、タスク供与装置50及びNIRS100について説明する。
【0025】
タスク供与装置50は、被験者に対して、脳活動上のタスクを与えるための装置である。「脳活動上のタスク」とは、例えば「ある一定期間、右手を握ろうと考える」という思念上のタスク(課題)である。このタスクの内容については、予め被験者に説明されており、タスク供与装置50は、上記「一定期間」の開始と終了を被験者に知らせるための装置である。従って、タスク供与装置50としては、「一定期間」の開始時から終了時の間まで(逆でもよい)発光する発光装置の他、同様の動作をする表示装置、発音装置(スピーカ、ブザー)、振動装置(バイブレータ)等が考えられる。
【0026】
タスク供与装置50は、タスク制御部30によって制御される。タスク制御部30は、例えば、レスト期間(何も思念せずに休憩する期間)10秒、タスク期間(右手を握ろうと考える期間)30秒、レスト期間10秒を1セットとして、複数セットを繰り返すように、タスク供与装置50を制御する。図4は、被験者に与えられる脳活動上のタスクの状態変化を例示した図である。
【0027】
図5は、NIRS100の構成を例示した図である。NIRS100は、被験者200の頭部に被せられるホルダ102と、複数の送光ファイバ104と、複数の検出ファイバ106と、受光装置110と、近赤外光発生装置112と、処理装置114と、を備える。
【0028】
ホルダ102には、複数の送光ファイバ104及び複数の検出ファイバ106の先端が装着される。ホルダ102は、被験者200の頭部に被せられることにより、複数の送光ファイバ104及び複数の検出ファイバ106の先端を被験者200の頭部に密着させる。
【0029】
図示するように、送光ファイバ104と検出ファイバ106は、行方向及び列方向に交互となるように正方格子状に配置される。送光ファイバ104の他端には、近赤外光発生装置112が接続され、近赤外光発生装置112から近赤外光が供給される。送光ファイバ104は、近赤外光発生装置112により供給された近赤外光を被験者側の先端から送出し、被験者200の頭部に照射する。送光ファイバ104から送出された近赤外光は、被験者200の頭部内に入射する。被験者200の頭部内に入射した近赤外光は、検出ファイバ106の先端に入射して受光装置110に入力される。受光装置110は、検出ファイバ106から供給される近赤外光を電気信号に変換して処理装置114に出力する。
【0030】
処理装置114は、受光装置110から入力された電気信号を解析し、酸素化ヘモグロビン(oxy−Hb)と脱酸素化ヘモグロビン(deoxy−Hb)の濃度を測定する。処理装置には、操作パネル116、表示装置118が取り付けられており、種々の操作及び状態表示が可能となっている。また、処理装置114により測定された酸素化ヘモグロビンと脱酸素化ヘモグロビンの濃度は、インタフェース120を介して脳活動状態解析装置1に出力される。
【0031】
ここで、被験者200の頭部において酸素化ヘモグロビンの濃度等が測定された箇所(図中、□で示す複数の測定ポイント108)は、送光ファイバ104と検出ファイバ106の中点と仮想的に見なすことができる。送光ファイバ104と検出ファイバ106は複数存在するため、測定ポイント108も複数存在することになる。図5における□内の数字(1〜48)は、測定ポイント108の識別ナンバーである。
【0032】
NIRS100は、こうした複数の測定ポイント108のそれぞれについての酸素化ヘモグロビンの濃度等を、同時に又は順次測定し、測定ポイント108に付随するリアルタイムデータとして脳活動状態解析装置1に出力する。なお、NIRS100の態様は上記説明したものに限らず、如何なる態様であってもよい。
【0033】
以下、上記各機能ブロックについて説明する。また、NIRS100から入力される各時点の酸素化ヘモグロビンの濃度を、(oxy−Hb)と表記する。また、(oxy−Hb)が時刻に応じて変動する時系列データを[oxy−Hb]と表記する。
【0034】
タスク制御部30は、上記のようにタスク供与装置50に指示すると共に、レスト期間とタスク期間の切り替わりのタイミング及びどちらの期間に切り替わったかを、指標データ生成部32に通知する。
【0035】
指標データ生成部32は、NIRS100から入力された[oxy−Hb]に対してノイズ除去処理を行い、ノイズ除去後のデータ[oxy−Hb*](特許請求の範囲における「指標データ」に相当する)を生成する。ノイズ除去処理は、例えば離散ウェーブレット変換による多重解像度解析によって行われる。
【0036】
図6は、入力された[oxy−Hb]からノイズ除去後のデータ[oxy−Hb*]を得る様子を示す図である。図中、右上の信号がNIRS100から入力された[oxy−Hb](原信号)である。また、左側の各図は、[oxy−Hb]を周波数別に10段階に分解したデータ(d1〜d10)を示している。図中、括弧内の数値は周期を示す。周期が最も短いd1、d2は、NIRS100のノイズを示し、d3、d4は、呼吸による影響と考えられる。また、d5、d6は、血圧変動・体温調整による影響などが含まれていると考えられる。指標データ生成部32は、例えば、タスクとレストの周期が50秒であるため、それと同様の周期を有するd8と、その前後のd7、d9を必要なデータとして扱い、更に長い周期のd10はトレンド成分として無視できるものとする。そして、d7〜d9に対して加重和を求めたり、加算を行ったりすることにより、ノイズ除去後のデータ[oxy−Hb*]を生成する。なお、離散ウェーブレット変換による多重解像度解析については、<特願2005−244370/特開2007−54376>において、より詳細に説明されている。
【0037】
ノイズ除去後のデータ[oxy−Hb*]は、指標値(oxy−Hb*)が変動するリアルタイムデータとして逐次データ変換部34に供給され、或いは一定期間のデータセット[oxy−Hb*]としてメモリ装置18に格納される。また、指標値(oxy−Hb*)には、時刻に応じて変動する値であると共に、タスク制御部30から入力されたデータに基づき判別されるタスクの状態が付与されている。すなわち、指標値(oxy−Hb*)には、NIRS100により計測された時刻において、タスクの状態がレストであったか、タスクであったかを判別するための情報が付与されている。
【0038】
なお、ノイズ除去処理として離散ウェーブレット変換による多重解像度解析を採用するのはあくまで一例であり、移動平均を求める等、他の手法を用いても構わない。また、精度上の問題は生じるが、「指標データ」はノイズ除去を行わない生データ[oxy−Hb]であっても構わない(この場合、指標データ生成部32は、NIRS100から入力された(oxy−Hb)をそのままメモリ装置18に格納したり、データ変換部34に供給したりする)。
【0039】
データ変換部34はまず、指標データ生成部32により生成されたノイズ除去後の指標値(oxy−Hb*)の時間微分値d(oxy−Hb*)/dtを求める(以下、単に微分値と表記する)。図7は、指標値(oxy−Hb*)と微分値d(oxy−Hb*)/dtの時間変化を示す図である。図中、実線は指標値(oxy−Hb*)の時間変化を示し、破線は微分値d(oxy−Hb*)/dtの時間変化を示している。
【0040】
データ変換部34は、更に、指標値(oxy−Hb*)と、その微分値d(oxy−Hb*)/dtを二軸とする位相平面上に、指標値(oxy−Hb*)と微分値d(oxy−Hb*)/dtを成分とする各座標をプロットする。プロットされる各座標には、タスクの状態が付与されている。図8は、指標値(oxy−Hb*)と、その微分値d(oxy−Hb*)/dtを位相平面上に展開したデータを示す図である。図中、矢印は、指標値(oxy−Hb*)に対応する元データ(oxy−Hb)が測定された時刻の推移を示している。また、図中、実線はタスク期間に測定された(oxy−Hb)に相当する座標の軌跡であることを示し、破線はレスト期間に測定された(oxy−Hb)に相当する座標の軌跡であることを示している。このように、指標値(oxy−Hb*)と、その微分値d(oxy−Hb*)/dtを二軸とする位相平面上では、タスク期間に相当する座標と、レスト期間に相当する座標は、それぞれが、ある程度のまとまりをもって出現する傾向を示す。大まかにいうと、タスク期間に相当する座標は、位相平面における上半分の領域((oxy−Hb*)が高い領域)に出現し、レスト期間に相当する座標は、位相平面における下半分の領域((oxy−Hb*)が低い領域)に出現する傾向を示す。
【0041】
ここで、前述のように、位相平面上に展開されたデータは、複数の測定ポイント毎に得られたデータに基づいている。従って、複数の測定ポイント毎に、位相平面上に展開されたデータが存在することになる。
【0042】
ここで、測定ポイントは、被験者200の頭部の異なる箇所に該当するものである。各測定ポイントにおける実際の脳活動は、被験者200によって異なるものであるし、被験者200の頭蓋骨の厚さや髪の生え具合等によって測定強度も異なるものである。従って、与えたタスクの種類(本実施例では「右手を握ろうと考える」)に応じて、どの箇所で最も脳活動が鮮明に現れるか、また測定が容易であるかは、被験者200によって様々である。
【0043】
そこで、評価値算出部36は、対象となる被験者200について、与えたタスクに応じて最も測定に適した測定ポイントを選択するために、測定ポイントの適合性を評価した評価値を算出する。
【0044】
本実施例では、図8に示した位相平面上に展開したデータにおいて、タスク期間に相当する座標の軌跡と、レスト期間に相当する座標の軌跡が明確に分離している測定ポイントを、好ましい測定ポイントとして高い評価を与える。後述するように本実施例の脳活動状態解析装置1は、本作動段階において、位相平面上に展開した入力データの位置によって被験者200の脳活動状態を推定するからである。
【0045】
図9は、異なる測定ポイントによる測定データから得られた、位相平面上に展開したデータを並べて示す図である。図9(A)のデータは、タスク期間に相当する座標の軌跡と、レスト期間に相当する座標の軌跡が明確に分離しているため、好ましい測定ポイントによるものである。一方、図9(B)のデータは、タスク期間に相当する座標の軌跡と、レスト期間に相当する座標の軌跡が混在して判別しにくいため、好ましくない測定ポイントによるものである。
【0046】
評価値算出部36は、上記説明したような明確に分離していることを示す評価値として、位相平面上の座標群におけるグループ内分散σ2Wで、グループ間分散σ2Bを除算して分散度Jσを算出する(次式(1))参照)。ここで、グループは、タスク期間とレスト期間のいずれに測定されたデータによるものであるか、によって決定される。なお、「何回目の」タスク期間/レスト期間であるか、については考慮しない。
【0047】
Jσ=σ2B/σ2W …(1)。
【0048】
グループ内分散σ2Wとは、位相平面上における、タスク期間とレスト期間のそれぞれのグループに属する座標群内の分散であり、次式(2)で表される。式中、nは総座標数であり、iはグループ(タスク期間/レスト期間)を示す識別子であり、cはグループ数(本実施例では2)である。また、xkは順番にサンプリングされる座標であり、niは各グループに属する座標数であり、miはグループ内の全座標の重心である。式(2)から分かるように、グループ内分散σ2Wは、グループ内のデータの散らばりを表す値である。グループ内分散σ2Wが小さい程、同じ傾向を有する座標群の特徴が精度よく表れていると考えられる。図10は、グループ内分散σ2Wを概念的に示す図である。
【0049】
【数1】
【0050】
一方、グループ間分散σ2Bとは、位相平面上における、タスク期間のグループとレスト期間のグループとの分散であり、次式(3)で表される。式中、mはグループを問わない全ての座標の重心である。式(3)から分かるように、グループ間分散σ2Bは、グループ同士の散らばり(距離)を表す値である。グループ間分散σ2Bが大きい程、異なる傾向を有する座標群が明確に分離していることになる。図11は、グループ間分散σ2Bを概念的に示す図である。
【0051】
【数2】
【0052】
これらより、グループ内分散σ2Wが小さい程、そしてグループ間分散σ2Bが大きい程、例えばタスク期間とレスト期間の座標群が明確に分離し、且つそれぞれがまとまっているため、好ましい座標群である(好ましい測定ポイントである)と判断できる。評価値算出部36は、係る原理に従い、上式(1)に基づき分散度Jσを算出する。これによって、被験者200に与えた脳活動上のタスクに応じた測定ポイントの決定を、精度良く行うことができる。図12は、分散度Jσを概念的に示す図である。
【0053】
なお、本出願人の発明者は、図9の軌跡を生成した各データに対して分散度Jσを算出したところ、図9(A)のデータについては、Jσ=1.2397という結果を、図9(B)のデータについては、Jσ=0.0020という結果を得た。これによって、タスク期間に対応する座標の軌跡とレスト期間に対応する座標の軌跡が、それぞれまとまって観測される測定ポイントは、高い分散度Jσを示すことが分かる。従って、このような分散度Jσは位相平面上の座標群の評価に有効である。
【0054】
なお、評価値算出部36が算出する評価値は、上式(1)で示される分散度Jσを採用することが好ましいが、次式(4)〜(6)で示されるように、分散度Jσと同様の性質を示す値であれば、これらを採用しても構わない。また、式(4)の各項に係数を乗じる等、適合性向上のための変形等は許容される。
【0055】
(評価値*)=σ2B−σ2W …(4)
(評価値**)=σ2B …(5)
(評価値***)=1/σ2W …(6)
【0056】
測定ポイント選択部38は、評価値算出部36により算出された分散度Jσに基づき、好ましい測定ポイントを選択する。具体的には、単に分散度Jσが最も高い測定ポイントを選択してもよいし、分散度Jσに加えて他の条件を反映させて測定ポイントを選択してもよい。係る処理によって、好ましい測定ポイントを、迅速に且つ自動的に決定することができる。
【0057】
また、測定ポイント選択部38は、一の測定ポイントを選択するだけでなく、複数の測定ポイントを選択してもよい。この場合、後述する本作動段階では、複数の測定ポイントによるデータを反映させた関数等を用いて被験者200の脳活動状態を推定する。
【0058】
また、上記のように自動的に測定ポイントを選択するのに限らず、表示装置24等により測定ポイント毎の分散度Jσをユーザに提示し、ユーザが入力装置22を用いて測定ポイントを選択する処理を行ってもよい(ユーザの選択を受け付ける)。
【0059】
以上説明した準備段階の処理により、被験者200に与えた脳活動上のタスクに応じた測定ポイントの決定を、精度良く行うことができる。
【0060】
〔本作動段階〕
以下、準備段階において選択された測定ポイントを用いて行われる本作動段階の処理について説明する。図13は、本作動段階の処理を概念的に示す図である。
【0061】
本作動段階では、タスク供与装置50による脳活動上のタスクの供与は行われず、準備段階と同じ被験者200が、準備段階で供与された脳活動上のタスクと同じこと(「右手を握ろうと考える」)を思念する。
【0062】
脳活動状態推定部40は、被験者200が上記思念を行った前後において、準備段階で選択された測定ポイントにおいて測定されたデータを解析し、被験者200が上記思念を行った期間を推定する。
【0063】
係る推定処理によって被験者200が特定の脳活動を行ったことを推定可能であると、その推定結果を様々な用途に利用することができる。詳しくは後述するが、例えば右手が十分に動かない被験者200に対しては、右手を握ろうと考えたタイミングと同期して右手を握る筋肉に筋刺激を与えることにより、効果的なリハビリテーションの補助を行うことができる。また、ロボットアーム等を思念により操縦することもできる。特に右手が不自由な被験者200の場合、電動式・油圧式等の可動式義手の操作を思念により行うこともできる。また、ゲーム機器等において、思念によってキャラクターの移動操作等を行うこともできる。
【0064】
脳活動状態推定部40は、具体的には、パーセプトロンというパターン認知法に基づき脳活動状態の推定を行う。
【0065】
まず、測定ポイントにおいて測定されたデータ(oxy−Hb)に対しては、指標データ生成部32によりノイズ除去処理が行われ、(oxy−Hb*)が生成される。そして、データ変換部34により、(oxy−Hb*)が位相平面上のデータに変換される。
【0066】
脳活動状態推定部40は、位相平面上のデータ(以下、係る位相平面上の座標データを入力データと称する)に対して、準備段階で位相平面上にプロットされた各座標のうち、最も距離が小さい座標を抽出する。そして、抽出した座標がいずれのグループに属するか(タスク期間か、レスト期間か)によって、被験者200が思念を行ったタイミングであるか否かを判定する。
【0067】
ここで、脳活動状態推定部40は、入力データと、準備段階で位相平面上にプロットされた各座標との距離を判定する際に、以下の識別関数g(x)を用いる(次式(7)参照)。式中、xは入力データの座標であり、xiは位相平面上の各座標である。式から分かるように、識別関数g(x)は、通常のベクトル間距離からxの二乗の項を除外している。xの二乗の項は、入力データが一定であれば変化しないため、最小距離を求める問題においては無視できるからである。
【0068】
【数3】
【0069】
このような手法により、従来の単純な閾値に基づく判定よりも、高精度に被験者200の脳活動状態を推定することができる。図14は、従来の単純な閾値に基づく判定原理を例示した図である。図示するように、従来の単純な閾値に基づく判定では、準備段階で計測された(oxy−Hb)の最大値に対して閾値を設定し、境界判定をおこなっていた。
【0070】
これに対し、本実施例の脳活動状態解析装置1では、上記のような判定を行うため、どのような複雑な決定境界でも近似的に表現することができ、より被験者200の脳活動傾向に即した判定を行うことができる。この結果、被験者200の脳活動状態を、より高精度に推定することができる。図15は、本実施例の脳活動状態解析装置1の判定原理を示す図である。
【0071】
なお、被験者200に供与されるタスクは、一種類に限定される必要は無く、複数種類のタスクが供与されてもよい。この場合、「グループ」は複数種類となるが、上式(1)〜(3)等は、元々複数種類のタスクに対応しているため、そのまま用いることができる。
【0072】
なお、本出願人の発明者は、準備段階と本作動段階を連続して行い、準備段階と本作動段階を通じて同じような周期で「右手を握ろうと考える」が、本作動段階では、タスク制御部30からの情報を用いずに脳活動状態の推定を行うという実験を行った。図16は、本作動段階の推定精度を確認するための実験結果を示す図である。図16(A)は、比較対象となる手法(移動平均処理を施し、準備段階で計測された(oxy−Hb)の最大値の20%を閾値として、閾値を上回った場合にonと判定する)による推定結果である。一方、図16(B)は本実施例の手法による推定結果である。図示するように、比較対象となる手法では、被験者200が右手を握ろうと考えた期間と、脳活動状態がタスク側であると推定された期間(on期間)が必ずしも一致しなかったが、本実施例の脳活動状態解析装置1では、これが高確率で一致することが確かめられた。
【0073】
〔まとめ〕
以上説明した本実施例の脳活動状態解析装置1によれば、準備段階では、位相平面上に展開したデータに対して、タスクの状態によるグループ分けに依存したデータの散らばりに基づいて測定ポイントを評価するため、被験者200に与えた脳活動上のタスクに応じた測定ポイントの決定を、精度良く行うことができる。
【0074】
また、本作動段階では、入力データに対して、準備段階で位相平面上にプロットされた各座標のうち、最も距離が小さい座標の属するグループに応じて被験者200の脳活動を推定するため、被験者200の脳活動状態を、より高精度に推定することができる。
【0075】
<利用例>
以下、本実施例の脳活動状態解析装置1の利用例について簡単に説明する。
【0076】
〔リハビリテーション補助装置〕
図17は、脳活動状態解析装置1を利用したリハビリテーション補助装置300の構成例である。リハビリテーション補助装置300は、筋刺激装置310を備える。筋刺激装置310は、周知の低周波治療器等が用いられ、タスクとして供与された脳活動において、動かそうとする体の箇所に対応した筋肉に取り付けられる。そして、脳活動状態解析装置1は、被験者200が特定の脳活動状態に在ると判定した期間において、筋刺激装置310に駆動信号を送出する。これによって、被験者200が例えば「右手を握ろう」と考えたタイミングで右手の筋肉が刺激され、リハビリテーション効果が得られる。
【0077】
〔思念制御型駆動装置〕
図18は、脳活動状態解析装置1を利用した思念制御型駆動装置400の構成例である。思念制御型駆動装置400は、アクチュエータ410を備える。アクチュエータ410の態様は如何なるものであってもよいが、例えばロボットアーム、電動式・油圧式等の可動式義手等が考えられる。この場合、脳活動状態解析装置1は、被験者200が特定の脳活動状態に在ると判定した期間において、アクチュエータ410に駆動信号を送出する。これによって、被験者200が例えば「右手で何かをつかむ」と考えたタイミングで、アクチュエータ410が対象物をつかむといった制御が可能となる。
【0078】
〔思念制御型表示装置〕
図19は、脳活動状態解析装置1を利用した思念制御型表示装置500の構成例である。思念制御型表示装置500は、表示装置510を備える。思念制御型表示装置500は、例えばゲーム機等のバーチャル機器に好適に用いられる。この場合、脳活動状態解析装置1は、被験者200が特定の脳活動状態に在ると判定した期間において、表示装置510に特定表示を行うように指示信号を送出する。これによって、被験者200が例えば「前に進む」と考えたタイミングで、画面上のキャラクターが前に進むといった制御が可能となる。
【0079】
以上、本発明を実施するための最良の形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
【符号の説明】
【0080】
1 脳活動状態解析装置
30 タスク制御部
32 指標データ生成部
34 データ変換部
36 評価値算出部
38 測定ポイント選択部
40 脳活動状態推定部
50 タスク供与装置
100 NIRS
300 リハビリテーション補助装置
400 思念制御型駆動装置
500 思念制御型表示装置
【特許請求の範囲】
【請求項1】
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき前記被験者の脳の活動状態を解析する脳活動状態解析装置であって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知するタスク状態検知手段と、
前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する指標データ生成手段と、
前記指標データ生成手段により生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する変換手段と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存した前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する評価値算出手段と、
を備える脳活動状態解析装置。
【請求項2】
請求項1に記載の脳活動状態解析装置であって、
前記評価値は、前記グループ内のデータの散らばりが小さい程大きくなる傾向、及び/又は前記グループ間のデータの散らばりが大きい程大きくなる傾向を有する値である、
脳活動状態解析装置。
【請求項3】
請求項1に記載の脳活動状態解析装置であって、
前記評価値は、前記グループ間のデータの散らばりを前記グループ内のデータの散らばりで除算した値である、
脳活動状態解析装置。
【請求項4】
請求項1ないし3のいずれか1項に記載の脳活動状態解析装置であって、
前記評価値算出手段により算出された評価値に基づき、前記複数の測定ポイントから好ましい測定ポイントを選択する選択手段を備える、
脳活動状態解析装置。
【請求項5】
請求項1ないし3のいずれか1項に記載の脳活動状態解析装置であって、
前記評価値算出手段により算出された評価値をユーザに提示し、前記ユーザによる測定ポイントの選択を受け付ける選択受付手段を備える、
脳活動状態解析装置。
【請求項6】
請求項1ないし5のいずれか1項に記載の脳活動状態解析装置であって、
前記被験者に対して脳活動上のタスクを与えるための動作を行うタスク供与手段を備え、
前記タスク状態検知手段は、前記タスク供与手段の動作状態に基づいて前記タスクの状態を検知する手段である、
脳活動状態解析装置。
【請求項7】
請求項1ないし6のいずれか1項に記載の脳活動状態解析装置であって、
前記指標データ生成手段は、前記複数の受光手段の測定データに対してノイズ除去処理を行って前記指標値を算出する手段である、
脳活動状態解析装置。
【請求項8】
請求項1に記載の脳活動状態解析装置であって、
入力データに対応して前記指標データ生成手段により算出された指標値が、予め前記評価値算出手段によりグループ化された位相平面上のデータのうちいずれのデータとの間で最も前記位相平面上の距離が小さいかに基づき、被験者の脳活動状態を推定する脳活動状態推定手段を備える、
脳活動状態解析装置。
【請求項9】
請求項8に記載の脳活動状態解析装置であって、
前記脳活動状態推定手段は、ベクトル演算における距離の算出式から前記指標値の二乗の項を除外した関数に基づき前記位相平面上の距離を算出する手段である、
脳活動状態解析装置。
【請求項10】
請求項8又は9に記載の脳活動状態解析装置と、
前記脳活動状態推定手段により前記被験者の脳活動状態が所定の状態にあると推定されたときに、前記被験者に筋刺激を与える筋刺激供与手段と、
を備えるリハビリテーション補助装置。
【請求項11】
請求項8又は9に記載の脳活動状態解析装置と、
前記脳活動状態推定手段により前記被験者の脳活動状態が所定の状態にあると推定されたときに、所定の動作を行うアクチュエータと、
を備える思念制御型駆動装置。
【請求項12】
請求項8又は9に記載の脳活動状態解析装置と、
前記脳活動状態推定手段により前記被験者の脳活動状態が所定の状態にあると推定されたときに、所定のイメージ画像を表示する表示手段と、
を備える思念制御型表示装置。
【請求項13】
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき、前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイントから、好適な測定ポイントを選択する測定ポイント選択方法であって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知する処理と、
前記複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する処理と、
前記生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する処理と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存する前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する処理と、
前記算出された評価値に基づき好適な測定ポイントを選択する処理と、
をコンピュータが実行する測定ポイント選択方法。
【請求項14】
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき、前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイントから、好適な測定ポイントを選択する測定ポイント選択方法であって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知する処理と、
前記複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する処理と、
前記生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する処理と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存する前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する処理と、
前記算出された評価値を提示し、ユーザによる好適な測定ポイントの選択を受け付ける処理と、
をコンピュータが実行する測定ポイント選択方法。
【請求項15】
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき、前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイントから、好適な測定ポイントを選択するための測定ポイント選択プログラムであって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知する処理と、
前記複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する処理と、
前記生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する処理と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存する前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する処理と、
前記算出された評価値に基づき好適な測定ポイントを選択する処理と、
をコンピュータに実行させる測定ポイント選択プログラム。
【請求項16】
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき、前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイントから、好適な測定ポイントを選択するための測定ポイント選択プログラムであって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知する処理と、
前記複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する処理と、
前記生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する処理と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存する前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する処理と、
前記算出された評価値を提示し、ユーザによる好適な測定ポイントの選択を受け付ける処理と、
をコンピュータに実行させる測定ポイント選択プログラム。
【請求項1】
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき前記被験者の脳の活動状態を解析する脳活動状態解析装置であって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知するタスク状態検知手段と、
前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する指標データ生成手段と、
前記指標データ生成手段により生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する変換手段と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存した前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する評価値算出手段と、
を備える脳活動状態解析装置。
【請求項2】
請求項1に記載の脳活動状態解析装置であって、
前記評価値は、前記グループ内のデータの散らばりが小さい程大きくなる傾向、及び/又は前記グループ間のデータの散らばりが大きい程大きくなる傾向を有する値である、
脳活動状態解析装置。
【請求項3】
請求項1に記載の脳活動状態解析装置であって、
前記評価値は、前記グループ間のデータの散らばりを前記グループ内のデータの散らばりで除算した値である、
脳活動状態解析装置。
【請求項4】
請求項1ないし3のいずれか1項に記載の脳活動状態解析装置であって、
前記評価値算出手段により算出された評価値に基づき、前記複数の測定ポイントから好ましい測定ポイントを選択する選択手段を備える、
脳活動状態解析装置。
【請求項5】
請求項1ないし3のいずれか1項に記載の脳活動状態解析装置であって、
前記評価値算出手段により算出された評価値をユーザに提示し、前記ユーザによる測定ポイントの選択を受け付ける選択受付手段を備える、
脳活動状態解析装置。
【請求項6】
請求項1ないし5のいずれか1項に記載の脳活動状態解析装置であって、
前記被験者に対して脳活動上のタスクを与えるための動作を行うタスク供与手段を備え、
前記タスク状態検知手段は、前記タスク供与手段の動作状態に基づいて前記タスクの状態を検知する手段である、
脳活動状態解析装置。
【請求項7】
請求項1ないし6のいずれか1項に記載の脳活動状態解析装置であって、
前記指標データ生成手段は、前記複数の受光手段の測定データに対してノイズ除去処理を行って前記指標値を算出する手段である、
脳活動状態解析装置。
【請求項8】
請求項1に記載の脳活動状態解析装置であって、
入力データに対応して前記指標データ生成手段により算出された指標値が、予め前記評価値算出手段によりグループ化された位相平面上のデータのうちいずれのデータとの間で最も前記位相平面上の距離が小さいかに基づき、被験者の脳活動状態を推定する脳活動状態推定手段を備える、
脳活動状態解析装置。
【請求項9】
請求項8に記載の脳活動状態解析装置であって、
前記脳活動状態推定手段は、ベクトル演算における距離の算出式から前記指標値の二乗の項を除外した関数に基づき前記位相平面上の距離を算出する手段である、
脳活動状態解析装置。
【請求項10】
請求項8又は9に記載の脳活動状態解析装置と、
前記脳活動状態推定手段により前記被験者の脳活動状態が所定の状態にあると推定されたときに、前記被験者に筋刺激を与える筋刺激供与手段と、
を備えるリハビリテーション補助装置。
【請求項11】
請求項8又は9に記載の脳活動状態解析装置と、
前記脳活動状態推定手段により前記被験者の脳活動状態が所定の状態にあると推定されたときに、所定の動作を行うアクチュエータと、
を備える思念制御型駆動装置。
【請求項12】
請求項8又は9に記載の脳活動状態解析装置と、
前記脳活動状態推定手段により前記被験者の脳活動状態が所定の状態にあると推定されたときに、所定のイメージ画像を表示する表示手段と、
を備える思念制御型表示装置。
【請求項13】
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき、前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイントから、好適な測定ポイントを選択する測定ポイント選択方法であって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知する処理と、
前記複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する処理と、
前記生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する処理と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存する前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する処理と、
前記算出された評価値に基づき好適な測定ポイントを選択する処理と、
をコンピュータが実行する測定ポイント選択方法。
【請求項14】
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき、前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイントから、好適な測定ポイントを選択する測定ポイント選択方法であって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知する処理と、
前記複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する処理と、
前記生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する処理と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存する前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する処理と、
前記算出された評価値を提示し、ユーザによる好適な測定ポイントの選択を受け付ける処理と、
をコンピュータが実行する測定ポイント選択方法。
【請求項15】
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき、前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイントから、好適な測定ポイントを選択するための測定ポイント選択プログラムであって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知する処理と、
前記複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する処理と、
前記生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する処理と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存する前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する処理と、
前記算出された評価値に基づき好適な測定ポイントを選択する処理と、
をコンピュータに実行させる測定ポイント選択プログラム。
【請求項16】
被験者の体に光を照射する複数の光照射手段と、前記被験者の体から放出される光を受光する複数の受光手段と、を備える送受光装置から入力される測定データに基づき、前記複数の光照射手段と前記複数の受光手段との組み合わせにより決定される複数の測定ポイントから、好適な測定ポイントを選択するための測定ポイント選択プログラムであって、
前記被験者に対して与えられる脳活動上のタスクの状態を検知する処理と、
前記複数の測定ポイント毎に、前記タスク状態検知手段により検知されるタスクの状態に対応付けられたデータであって、前記複数の受光手段の測定データに基づく指標値が変動する指標データを生成する処理と、
前記生成された指標データを、前記指標値と前記指標値の時間微分値とを二軸とする位相平面上のデータに変換して記憶手段に格納する処理と、
前記記憶手段に格納された位相平面上のデータを前記タスクの状態毎にグループ分けし、該グループ分けに依存する前記位相平面上のデータの散らばりに基づき、前記複数の測定ポイントのそれぞれを評価した評価値を算出する処理と、
前記算出された評価値を提示し、ユーザによる好適な測定ポイントの選択を受け付ける処理と、
をコンピュータに実行させる測定ポイント選択プログラム。
【図1】

【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】

【図10】

【図11】
【図12】

【図13】
【図14】

【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−52175(P2013−52175A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−193886(P2011−193886)
【出願日】平成23年9月6日(2011.9.6)
【出願人】(899000057)学校法人日本大学 (650)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月6日(2011.9.6)
【出願人】(899000057)学校法人日本大学 (650)
【Fターム(参考)】
[ Back to top ]