
腹腔鏡器具、カニューレアセンブリおよび関連外科方法
【課題】外科手術、特に、全体にヘソを通しての腹腔鏡作業のための器具とカニューレまたはポートアセンブリを提供すること。
【解決手段】それぞれが基体に対して鋭角で延在する3個のカニューレを有した腹腔鏡ポートユニットである。カニューレは可撓性であり各角状の腹腔鏡器具を収受する。カニューレユニットはポートホルダー中に回転収受され、ホルダーの長軸について回転する。ホルダーは患者の皮膚内の開口に配置可能である。
【解決手段】それぞれが基体に対して鋭角で延在する3個のカニューレを有した腹腔鏡ポートユニットである。カニューレは可撓性であり各角状の腹腔鏡器具を収受する。カニューレユニットはポートホルダー中に回転収受され、ホルダーの長軸について回転する。ホルダーは患者の皮膚内の開口に配置可能である。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は全体にヘソを通しての腹腔鏡手術の実施に役立つ外科用器具、外科ポートアセンブリおよび随伴方法に関するものである。
【背景技術】
【0002】
腹式の腹腔鏡手術は、胆嚢の腹腔鏡除去が従来の(開放的)手術より利益があることが明らかになった、1980年代後半に評判になった。低減された術後回復時間は顕著に術後の苦痛と創傷感染を低減した。改善された見掛けは腹腔鏡手術の充分に確立された利益である。これは主として腹腔鏡外科医の体腔壁の小さな切開を利用して手術を行う能力から生じるものである。
【0003】
腹腔鏡手術においては一般に腹腔内にCO2ガスをおよそ15mmHgの圧力まで吹き込む。腹壁が突通されて、5−10mm直径の真っ直ぐな筒状カニューレまたはトロカールスリーブが腹腔内に挿入される。手術室のモニターに接続された腹腔鏡を使って手術領域を可視化し、腹腔鏡はどれかのトロカールスリーブを通って配置される。腹腔鏡器具(グラスパー、ディセクター、ハサミ、リトラクターなど)は2以上の追加のトロカールスリーブを通って配置され、外科医や助手が操作する。
【0004】
最近所謂「ミニ腹腔鏡」が導入され、2−3mm直径の真っ直ぐなトロカールスリーブと腹腔鏡器具とが使われている。うまくゆくと、ミニ腹腔鏡により腹壁トラウマがさらに低減され見掛けも改善される。しかし、ミニ腹腔鏡作業に使われる器具は一般に高価で脆い。直径が小さく(弱い吸入洗浄システム、乏しい耐性、劣ったビデオ品質)作用に制約があるので、ミニ腹腔鏡器具は一般に好ましい組織構造(薄い空洞壁、少ない粘着性、最小の炎症など)を有した特定の患者にのみ使われる。腹腔鏡作業を必要とする患者の内でそのような患者の率は少ない。加えて、2−3mmの少ない切開でも依然好ましくない見掛けを起こし、創傷合併症も起こす(出血、感染、苦痛、ケロイド形成等)。
【0005】
小さな少ない体腔切開の利益が証明されているので、ヘソへの単一の切開を使って手術を行うことは魅力ある。ヘソは最も薄く血管の通りが最少で、良く隠された腹壁の領域である。ヘソは一般に腹腔鏡手術の好ましい腹腔入口である。
【0006】
顕著に見掛けに妥協したり創傷合併症を増加させることなしに、ヘソ切開は容易に拡大することができる(大きな試料を得るために)。2個以上の標準の(真っ直ぐな)カニューレと腹腔鏡器具をつぎつぎとヘソに配置することは所謂「チョップスティック」効果を招く。これは外科医の両手、外科医の手と器具間、および器具間の干渉である。この干渉により外科医の上記作業を行う能力を大きく低減される。
【0007】
したがって、全体にヘソを通って腹腔鏡作業をでき、しかも「チョップスティック効果」を低減または除去することのできる器具とトロカールシステムが必要となる。この発明の腹腔鏡器具とトロカールシステムを使って、腹腔鏡作業が全体にヘソを通して行われる。これにより必要な診断業務と治療業務が行われ、さらに腹壁のトラウマが最少となり見掛けも改善される。
【発明の概要】
【発明が解決しようとする課題】
【0008】
この発明は外科手術、特に全体にヘソを通しての腹腔鏡作業のための器具とカニューレまたはポートアセンブリを提供するものである。一つには、腹腔鏡作業中に患者の内部器官へのアクセスを容易とする改良されたポートアセンブリを提供するものである。
【0009】
またこの発明は複数の腹腔鏡器具がヘソを通して配置されるときに外科医の手により大きな作業空間を与えるポートアセンブリを提供するものである。ヘソを通しての手術を容易とする改良腹腔鏡器具を提供するものである。
【課題を解決するための手段】
【0010】
この発明の外科ポートアセンブリはこのような腹腔鏡外科作業の挙動を容易にするものであって、カニューレユニットとホルダーとを有しており、カニューレユニットは少なくとも1個のカニューレ部材を有しており、ホルダーは患者の皮膚の開口中に配置可能でカニューレコンポーネントを収受するものである。これにより外科手術中にカニューレコンポーネントはホルダーに対して可動である。好ましくは、カニューレユニットはホルダーに対してホルダーの長軸について回転可能である。ホルダーは手術中患者に締結され、カニューレユニットは患者に対して可動である。
【0011】
この発明の別の特徴によれば、カニューレユニットは基体またはフレームを有しており、該基体またはフレームはホルダーに着脱可能に取り付けられて、閉鎖面を画定している。閉鎖面は外科手術中開口において患者の皮膚に実質的に接線状に延在する。カニューレ部材は基体に連結されて、閉鎖面を通してのアクセス経路を画定する。カニューレ部材は閉鎖面に対して鋭角で延在する。これによりカニューレは少なくともポートアセンブリの緩和(無強勢)または静止形態において患者の皮膚面に対して傾斜している。例えばカニューレを通しての腹腔鏡器具の挿入前に、好ましくは少なくとも外科手術の一部の間そうなるのである。
【0012】
この発明のさらなる特徴によれば、カニューレが可撓性であって、線形である弛緩形態を有している。基体は閉鎖面を形成するパネルまたは壁を有している。
【0013】
一実施例においては、カニューレは複数のカニューレのひとつであり、各カニューレは閉鎖面に対して鋭角で延在している。ポートアセンブリの弛緩または静止形態において、外科手術中カニューレは全て患者の皮膚面に対して傾斜している。
【0014】
この発明の追加の特徴によれば、カニューレユニットは部分的にホルダー内に挿入可能であり、ポートアセンブリはさらにコネクター部材を有している。コネクター部材はカニューレユニットをホルダーに着脱可能に取り付ける。またコネクターはホルダー内に部分的に挿入可能である。
【0015】
ホルダーとコネクター部材とは突起と長孔などの協働錠止要素を有しており、カニューレユニットをホルダーに原状復帰可能に固定する。こうして、患者の開口中へのホルダーの配置後(ホルダーから挿入補助部材の除去後)、カニューレユニットの基体またはフレームがホルダーに挿入されて、コネクターの挿入と回転により固定され、突起と長孔とが錠止される。
【0016】
カニューレユニットの基体またはフレームは円錐台状の部分を有しており、これがホルダーに挿入できる。同様に、コネクターも円錐台状の部分を有しており、これがホルダーに挿入できてカニューレユニットをホルダーに固定する。ホルダーは肩を内部に有しておりこれがカニューレユニットの下部に係合する。
【0017】
上記のように一実施例においては、外科ポートアセンブリが(a)基体またはフレームと(b)カニューレとを有している。基体またはフレームは患者の皮膚内の開口内に配置可能であり、閉鎖面を画定している。閉鎖面は外科手術中に患者の皮膚に対して実質的に接線状に延在する。カニューレは基体に連結されて、閉鎖面を通るアクセス経路を画定する。
【0018】
カニューレは閉鎖面に対して鋭角で延在する。これにより、少なくともポートアセンブリの弛緩または静止形態において外科手術中、カニューレは患者の皮膚面に対して傾斜する。カニューレは複数のカニューレのひとつであり、各カニューレは閉鎖面に対して鋭角で延在する。これにより、少なくともポートアセンブリの弛緩または静止形態において腹腔鏡作業の間、カニューレは全て患者の皮膚面に対して傾斜する。
【0019】
閉鎖面が主面内に配置されている場合には、カニューレは線形形態を有しており、基体またはフレームは長軸を有している。各カニューレはそれぞれ主面に対して垂直に配置された二次面を有している。各二次面は長軸から離間している。カニューレは3個であってもよく、二次面は互いに120度の角度で配置される。
【0020】
この発明の外科方法においては、患者内に開口を形成し、開口を通してカニューレホルダーを挿入し、複数のカニューレをホルダー内に配置する。これによりホルダーの挿入後、カニューレはホルダーを横切り外部から患者内部に延在する。爾後複数の延在医療器具を各カニューレを通って挿入し、カニューレと器具とをホルダーに対してホルダーの長軸について回転する。
【0021】
この発明の別の態様によれば、カニューレが基体部材に取り付けてある場合には、カニューレのホルダー内への配置に際して、基体部材をホルダー内に挿入する。基体部材はホルダーと回転可能に係合する。カニューレのホルダー内への配置に際しては、さらに錠止部材をホルダーに取り付けて、基体部材をホルダーと回転可能係合に保つ。
【0022】
腹腔鏡トロカールスリーブを通して挿入可能なこの発明の腹腔鏡医療器具は、延在軸と、軸の一端に配置された作業端と、軸の他端に配置された第1のアクチュエーターとを有している。
【0023】
アクチュエーターは軸を介して作業端に作動連結されて、作業端の作用を制御する。軸は真っ直ぐな基端部と湾曲した中央部と真っ直ぐな末端部とを有しており、末端部は基端部に対して角度を有して延在する。基端部は第1の回転ジョイントを有しており、これにより末端部と作業端とが基端部の長軸について回転可能となる。
【0024】
末端部は第2の回転ジョイントを有しており、これにより作業端は末端部の長軸について回転可能である。第2のアクチュエーターは作業端とは反対側の軸の端部に配置され、器具の軸の基端部と作動連結されて、その末端部と作業端とを軸の基端部の長軸について回転させる。第3のアクチュエーターは作業端とは反対側の軸の端部に配置され、軸の末端部に作動連結されて、末端部の長軸について作業端を回転させる。
【0025】
器具の軸の基端部、中央部、末端部は実質的に剛性なので曲げることができない。この発明の一実施例においては、器具の軸はホッケースティック形状を有している。2個の腹腔鏡外科用器具のそれぞれはホッケースティック形状を有しており、交差形態で有利に使われる。これにより特に横(内側横方向)運動間は器具の自由度を顕著に改善する。
【0026】
一実施例においては、腹腔鏡トロカールスリーブに挿入可能な独立型腹腔鏡医療器具は、延在軸、作業端、アクチュエーターを有している。作業端は軸の一端に配置され、アクチュエーターは軸の反対側端部に配置され、軸を介して作業端に作動連結されて、作業端の作用を制御する。軸は基端部、中央部、末端部を有しており、少なくとも末端部は独立にC状に曲げることができる。少なくとも軸に沿った一点、好ましくは作業端または作業端近傍で軸の末端セグメントは長軸について回転可能である。
【0027】
この発明の追加の特徴によれば、錠止が軸に作動連結されていて、C状湾曲形態を解放可能に保持する。さらに末端部には関節ジョイントが設けられていて、軸の中央部に対して揺動可能である。基端部はまた独立にC状に曲げることができる。
【0028】
この発明の別の実施例によれば、腹腔鏡トロカールスリーブに挿入可能な独立型腹腔鏡医療器具は延在軸と作業端と手動アクチュエーターとを有している。作業端は軸の一端に配置され、手動アクチュエーターは軸の反対側端部に配置されている。手動アクチュエーターは軸を介して作業端に作動連結されている。第1の機構が軸に作動連結されていて、軸の基端部を第1の方向に曲げる。第2の機構が軸に作動連結されていて、軸の末端部を第1の方向とは異なる第2の方向に曲げる。これにより軸は複数の異なる形状のセグメントを有した形状となる。
【0029】
軸は一端に長軸を有しており、器具はさらに軸に作動連結されて軸について作業端を回転させる回転機構を有している。
【0030】
この発明の別の実施例の別の特徴においては、第1の錠止要素が第1の機構に作動連結されており、第2の錠止要素が第2の機構に作動連結されている。これにより、基端および末端部は異なる形状のセグメントとして保持されることができる。基端および末端部が第1および2の機構により共通面内で折り曲げ可能である。さらに器具には追加の機構が設けられていて、軸に作動連結されて、軸の末端部を面外の追加の方向に折り曲げる。
【0031】
第1の機構の作用に反応して軸の基端部が第1のC状形態を帯び、第2の機構の作用に反応して軸の末端部が第2のC状形態を帯びた場合には、それらのC状形態は軸の反対側で対面する。
【0032】
この発明のさらなる実施例によれば、腹腔鏡医療器具は、延在可撓性軸と、軸の一端に配置された作業端と、軸の他端に配置された手動アクチュエーターとを有しており、手動アクチュエーターは軸を介して作業端に作動連結されており、第1の曲折機構が軸に作動連結されて軸の基端部を第1の方向に曲げ、第2の曲折機構が軸に作動連結されて軸の末端部を第1の方向とは異なる第2の方向に曲げ、これにより軸が複数のアーチ状セグメントを有した形を帯びる。
【0033】
この発明の他の実施例の器具は、さらに軸に作動連結されて軸について作業端を回転させる回転機構と、第1の曲折機構に作動連結された第1の錠止要素と、第2の曲折機構に作動連結された第2の錠止要素とを有している。各曲折機構はその他端で軸に取り付けられた手動アクチュエーターを有している。
【発明の効果】
【0034】
この発明は腹腔鏡外科手術の挙動を容易とするものであって、数個の腹腔鏡器具がそれぞれのカニューレを通して患者内に挿入され、該カニューレは全て患者中の同じ開口、例えばヘソを通って延在する。そのような手術によれば、患者へのトラウマを最小にし、患者の回復を促進するという利点がある。
本発明は、例えば、以下を提供する。
(項目1)
患者の開口内に配置可能な環状ホルダーと、上記ホルダーに着脱可能に取り付けられたカニューレユニットとを有してなり、上記カニューレユニットが上記ホルダーに対してその長軸について回転可能であることを特徴とする外科ポートアセンブリ。
(項目2)
カニューレユニットが基体とカニューレを有しており、上記基体が上記ホルダーに着脱可能に取り付けられて閉鎖面を画定し、外科手術中上記開口において上記閉鎖面が患者の皮膚に対して実質的に接線方向に延在しており、上記カニューレが上記基体に連結されて上記閉鎖面を通ってのアクセス経路を画定しており、上記カニューレが上記閉鎖面に対して鋭角で延在しており、少なくともポートアセンブリの弛緩または静止形態において上記カニューレが患者の皮膚に対して傾斜していることを特徴とする項目1に記載のポートアセンブリ。
(項目3)
上記カニューレが可撓性であることを特徴とする項目2に記載のポートアセンブリ。
(項目4)
上記カニューレが線形である弛緩形態を有していることを特徴とする項目3に記載のポートアセンブリ。
(項目5)
上記基体が上記閉鎖面を形成するパネルまたは壁を有していることを特徴とする項目4に記載のポートアセンブリ。
(項目6)
上記カニューレが複数のカニューレのひとつであり、各カニューレは上記閉鎖面に対して鋭角で延在しており、少なくともポートアセンブリの弛緩または静止形態において全カニューレが患者の皮膚面に対して傾斜していることを特徴とする項目2に記載のポートアセンブリ。
(項目7)
上記カニューレユニットが上記ホルダー内に部分的に挿入可能であることを特徴とする項目1に記載のポートアセンブリ。
(項目8)
さらにコネクター部材が含まれていて、上記コネクター部材は上記カニューレユニットを上記ホルダーに着脱可能に取り付け、上記コネクター部材はまた上記ホルダー内に部分的に挿入可能であることを特徴とする項目7に記載のポートアセンブリ。
(項目9)
上記ホルダーと上記コネクター部材とが協働錠止要素を有していることを特徴とする項目8に記載のポートアセンブリ。
(項目10)
上記錠止要素が上記ホルダーおよび上記コネクター部材のいずれか一方の上に突起を有しており、さらに上記ホルダーおよび上記コネクター部材のもう一方の上に長孔を有していることを特徴とする項目9に記載のポートアセンブリ。
(項目11)
上記カニューレユニットは上記ホルダー内に挿入可能な基体を有しており、上記コネクターは上記ホルダー内に挿入可能な上記カニューレユニットを上記ホルダーに固定する部分を有していることを特徴とする項目8に記載のポートアセンブリ。
(項目12)
上記ホルダーが上記カニューレユニットの下端に係合する肩を内部に有していることを特徴とする項目7に記載のポートアセンブリ。
(項目13)
上記ホルダーが上記基体部材を患者に取外し可能に固定する手段を有していることを特徴とする項目1に記載のポートアセンブリ。
(項目14)
上記カニューレユニットが外科用器具のためのそれぞれのアクセス経路を画定する複数のカニューレ部材を有していることを特徴とする項目1に記載のポートアセンブリ。
(項目15)
患者の皮膚内の開口に配置可能で閉鎖面を画定する基体と、上記基体に連結されて上記閉鎖面を通ってのアクセス経路を画定するカニューレとを有しており、上記開口において外科手術中上記閉鎖面は患者の皮膚に対して実質的に接線方向に延在しており、上記カニューレは上記閉鎖面に対して鋭角で延在し、少なくともポートアセンブリの緩和または静止形態において上記カニューレは患者の皮膚面に対して傾斜していることを特徴とする外科ポートアセンブリ。
(項目16)
上記カニューレが複数のカニューレのひとつであり、上記各カニューレは上記閉鎖面に対して鋭角で延在しており、少なくともポートアセンブリの緩和または静止形態において全てのカニューレが患者の皮膚面に対して傾斜していることを特徴とする項目15に記載のポートアセンブリ。
(項目17)
閉鎖面が主面内に位置しており、上記カニューレが線形形態を有しており、上記各カニューレが上記主面に対して垂直なそれぞれの二次面を画定しており、上記基体が長軸を有しており、上記各二次面が上記長軸から離間していることを特徴とする項目16に記載のポートアセンブリ。
(項目18)
上記カニューレが3個であり、上記二次面が互いに120度の角度で配置されていることを特徴とする項目17に記載のポートアセンブリ。
(項目19)
上記カニューレが可撓性であることを特徴とする項目15に記載のポートアセンブリ。(項目20)
上記カニューレが線形である弛緩または無強勢の形態を有していることを特徴とする項目19に記載のポートアセンブリ。
(項目21)
上記基体が上記閉鎖面を形成するパネルまたは壁を有していることを特徴とする項目15に記載のポートアセンブリ。
(項目22)
さらにコネクター要素が設けられて、上記コネクター要素は上記基体と上記カニューレとをホルダーに着脱可能に取り付け、上記基体とカニューレが上記ホルダーに可動状に取り付けられ、上記ホルダーが外科手術中患者の開口内に配置できることを特徴とする項目15に記載のポートアセンブリ。
(項目23)
患者内の開口に配置可能な基体と、上記基体に連結されて患者内の開口を通るそれぞれのアクセス経路を画定する複数の別個のカニューレ部材とを有してなり、ポートアセンブリの弛緩または静止形態において上記カニューレ部材が互いにおよび上記基体に対して鋭角で配列されていることを特徴とする外科ポートアセンブリ。
(項目24)
上記カニューレ部材が3個であり、互いに120度の角度で配列されていることを特徴とする項目23に記載のポートアセンブリ。
(項目25)
さらにコネクター要素が設けられて、上記コネクター要素は上記基体を上記カニューレ部材とともにホルダーに着脱可能に取り付け、上記基体と上記カニューレが上記ホルダーに可動状に取り付けられ、上記ホルダーが外科手術中患者の開口内に配置可能であることを特徴とする項目23に記載のポートアセンブリ。
(項目26)
患者内に開口を形成し、上記開口を通してカニューレホルダーを挿入し、複数のカニューレを上記ホルダー内に配置し、上記ホルダーの挿入後、上記カニューレが上記ホルダーを横切って患者の外部から患者の内部に延在し、上記開口に上記ホルダーを通した後、複数の延在医療器具を上記各カニューレを通して挿入し、上記カニューレと上記医療器具を上記ホルダーに対して上記ホルダーの長軸について回転することを特徴とする外科方法。
(項目27) 上記カニューレが基体部材に取り付けられ、上記ホルダー内に上記カニューレを配置するに際して上記基体部材を上記ホルダー内に挿入し、上記基体部材が上記ホルダーと回転係合していることを特徴とする項目26に記載の方法。
(項目28)
上記カニューレを上記ホルダー内に配置するに際して、錠止体を上記ホルダーに取り付けて上記基体部材を上記ホルダーとの回転係合に保持することを特徴とする項目27に記載の方法。
(項目29)
腹腔鏡トロカールスリーブを通って挿入可能な腹腔鏡医療器具であって、延在軸と、上記軸の一端に取り付けられた作業端と、上記軸の他端に配置されて上記軸を介して上記作業端に作動連結されて上記作業端の作用を制御する第1のアクチュエーターと、上記軸の他端に取り付けられて基端部に作動連結されて末端部と上記作業端とを上記基端部の長軸について回転させる第2のアクチュエーターと、上記軸の他端に配置されて上記末端部に作動連結されて上記作業端を上記末端部の長軸について回転させる第3のアクチュエーターとを有してなり、上記軸が真直な基端部と湾曲した中央部と真直な末端部とを有しており、上記末端部が上記基端部に対して角度をもって延在しており、上記基端部が第1の回転ジョイントを有しており、上記末端部と上記作業端が上記基端部の長軸について回転可能であり、上記末端部が第2の回転ジョイントを有しており、上記作業端が上記末端部の長軸について回転可能であることを特徴とする医療器具。
(項目30)
上記基端部、上記中央部、上記末端部がそれぞれ全体が剛性であることを特徴とする項目29に記載の医療器具。
(項目31)
上記基端部、上記中央部、上記末端部が一体としてホッケースティック形状であることを特徴とする項目29に記載の医療器具。
(項目32)
腹腔鏡トロカールスリーブを通って挿入可能な独立型腹腔鏡医療器具であって、延在軸と、上記軸の一端に配置された作業端と、上記軸の他端に配置されたアクチュエーターとを有してなり、上記アクチュエーターは上記軸を介して上記作業端に作動連結されて上記作業端の作用を制御し、上記軸は基端部、中央部、末端部を有してなり、少なくとも上記末端部は独立に折曲可能でC状をなし、上記軸の隣接セグメントが器具の軸の少なくともひとつの場所において長軸について相対回転可能であることを特徴とする医療器具。
(項目33)
さらに上記軸に作動連結されてC型湾曲形態を解放可能に維持する錠止を有していることを特徴とする項目32に記載の医療器具。
(項目34)
上記末端部が関節ジョイントを有していることを特徴とする項目32に記載の医療器具。
(項目35)
上記基端部が独立に折曲可能でC状を形成することを特徴とする項目32に記載の医療器具。
(項目36)
腹腔鏡トロカールスリーブを通って挿入可能な独立型腹腔鏡医療器具であって、延在軸と、上記軸の一端に配置された作業端と、上記軸の他端に配置されて上記軸を介して上記作業端に作動連結されたアクチュエーターと、上記軸に作動連結されて上記軸の基端部を第1の方向に折り曲げる第1の機構と、上記軸に作動連結されて上記軸の末端部を上記第1の方向とは異なる第2の方向に折り曲げる第2の機構とを有しており、上記軸が複数の異なる形状セグメントを有した形状を呈していることを特徴とする医療器具。
(項目37)
上記軸が一端に長軸を有しており、さらに回転機構が上記軸に作動連結されて上記長軸について上記作業端を回転させることを特徴とする項目36に記載の医療器具。
(項目38)
さらに上記第1の機構に作動連結されている第1の錠止要素と、上記第2の機構に作動連結されている第2の錠止要素とを有しており、上記基端部、上記末端部は上記異なる形状セグメントとして維持されていることを特徴とする項目36に記載の医療器具。
(項目39)
上記基端部と上記末端部とが共通の面内の上記第1および2の機構により曲折可能であり、さらに追加の機構が上記軸に作動連結されていて、上記軸の末端部を上記面外の追加の方向に曲折することを特徴とする項目36に記載の医療器具。
(項目40)
上記軸の基端部が上記第1の機構の作用に反応して第1のC状形態を帯び、上記軸の末端部が上記第2の機構の作用に反応して第2のC状形態を帯び、上記第1および2のC状形態が上記軸の反対側に面していることを特徴とする項目36に記載の医療器具。
(項目41)
延在可撓性軸と、上記軸の一端に配置された作業端と、上記軸の他端に配置されて上記軸を介して作業端に連結されたアクチュエーターと、上記軸に作動連結されて上記軸の基端部を第1の方向に湾曲させる第1の曲折機構と、上記軸に作動連結されて上記軸の末端部を上記第1の方向と異なる第2の方向に湾曲させる第2の曲折機構とを有してなり、上記軸が複数のアーチ状セグメントを有した形状を帯びることを特徴とする腹腔鏡医療器具。
(項目42)
上記軸が一端に長軸を有しており、さらに上記軸に作動連結されていて上記作業端を上記長軸について回転させる回転機構を有していることを特徴とする項目41に記載の医療器具。
(項目43)
さらに上記第1の曲折機構に作動連結されている第1の錠止要素と、上記第2の曲折機構に作動連結されている第2の錠止要素とを有していることを特徴とする項目41に記載の医療器具。
(項目44)
上記第1および2の曲折機構がそれぞれ上記軸の他端において上記軸に取り付けられた手動アクチュエーターを含んでいることを特徴とする項目41に記載の医療器具。
(項目45)
上記基端部と上記末端部とが共通面内の上記第1および2の曲折機構により曲折可能であり、さらに上記軸に作動連結されて上記軸の末端部を上記面外の追加の方向に曲折する追加の曲折機構を有することを特徴とする項目41に記載の医療器具。
(項目46)
上記軸の基端部が上記第1の曲折機構の作用に反応して第1のC状形態を帯び、上記軸の末端部が上記第2の曲折機構の作用に反応して第2のC状形態を帯び、上記第1および2のC状形態が上記軸の反対側に面していることを特徴とする項目41に記載の医療器具。
【図面の簡単な説明】
【0035】
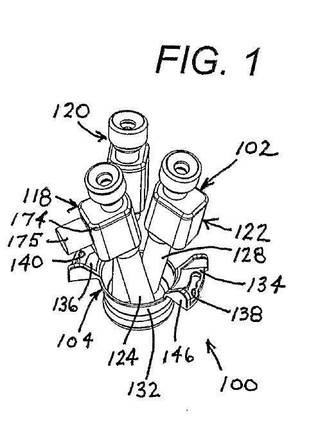
【図1】多数のカニューレを有したこの発明の腹腔鏡ポートの斜視図である。
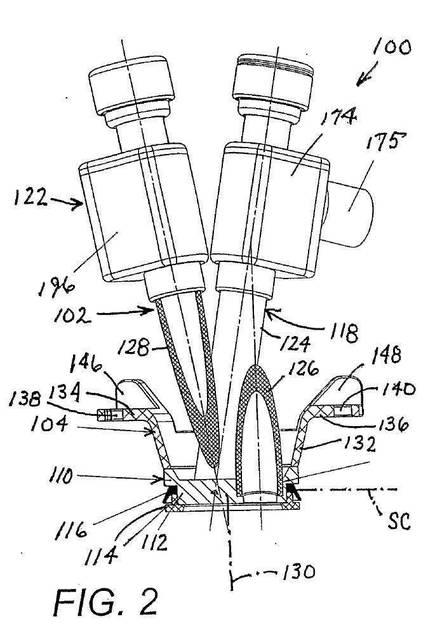
【図2】図3中線II−IIに沿って取った、図1の腹腔鏡ポートまたはカニューレアセンブリの断面図である。
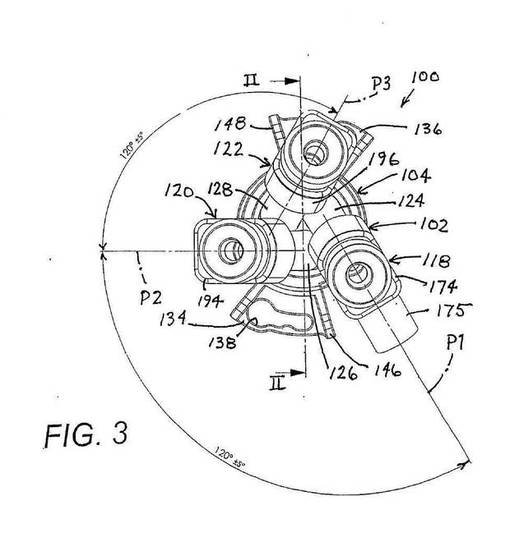
【図3】図1の腹腔鏡ポートまたはカニューレアセンブリの平面図である。
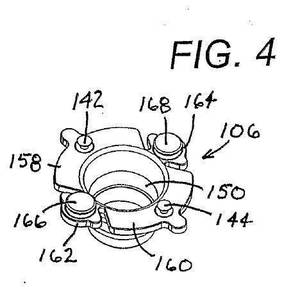
【図4】図1〜3の腹腔鏡ポートまたはカニューレアセンブリを受けるための、患者の開口に配置可能な環状ホルダーの斜視図である。
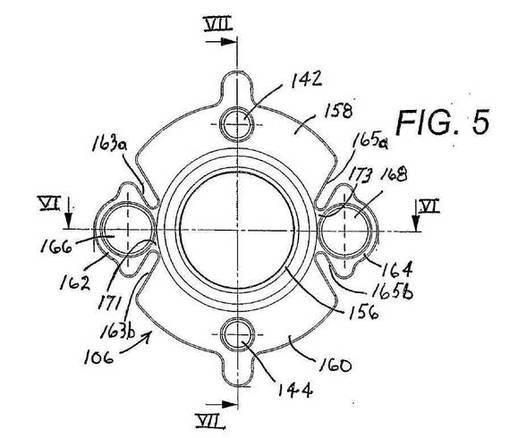
【図5】図4のポートホルダーの平面図である。
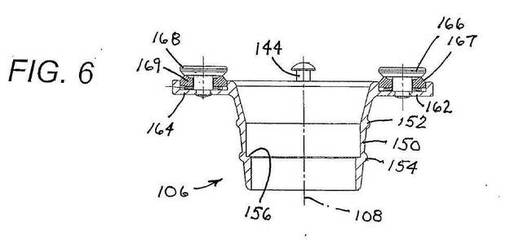
【図6】図5中線VI−VIに沿って取った、図4、5のポートホルダーの長手方向断面図である。
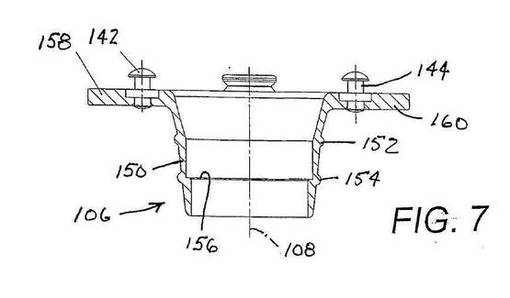
【図7】図5中線VII−VIIに沿って取った、図4、5のポートホルダーの別の長手方向断面図である。
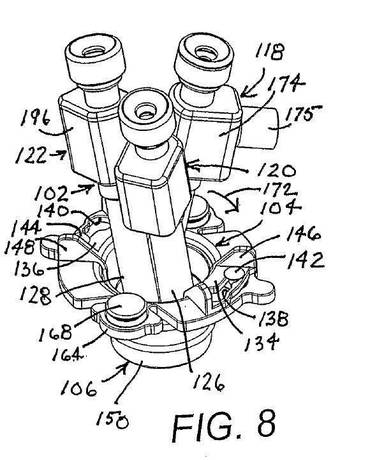
【図8】図1−3の腹腔鏡ポートまたはカニューレアセンブリならびに図4−7のポートホルダーの斜視図であり、ポートホルダーに挿入され、取り付けられた、腹腔鏡ポートまたはカニューレアセンブリを示している。
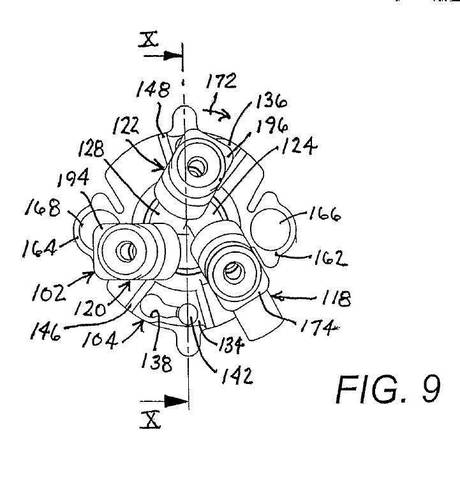
【図9】図8において示されているような図4−7のポートホルダーに連結された図1−3の腹腔鏡ポートまたはカニューレアセンブリの平面図である。
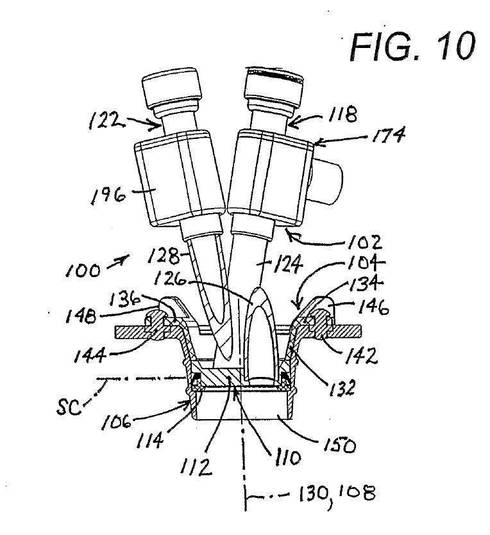
【図10】図9中線X−Xに沿って取った長手方向断面図である。
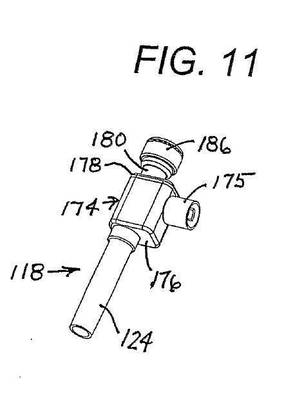
【図11】図1−3および図8−10の腹腔鏡ポートまたはカニューレアセンブリに含まれる、通気弁を有するカニューレの斜視図である。
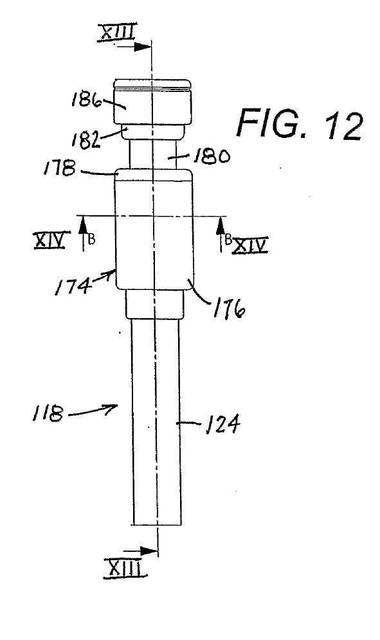
【図12】図11のカニューレの側面拡大図である。
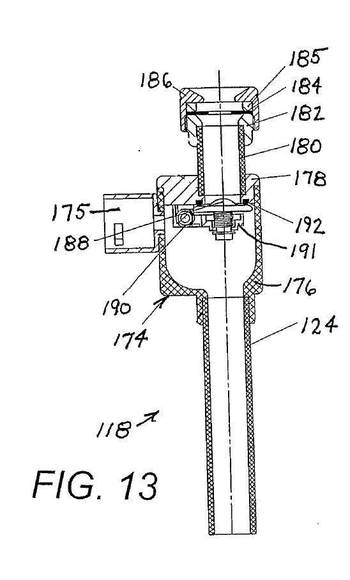
【図13】図12中線XIII−XIIIに沿って取った、図11、12のカニューレの長手方向断面図である。
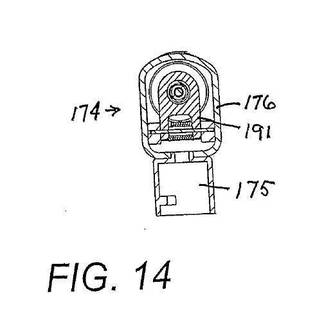
【図14】図12中線XIV−XIVに沿って取った、図11、12のカニューレの横方向断面図である。
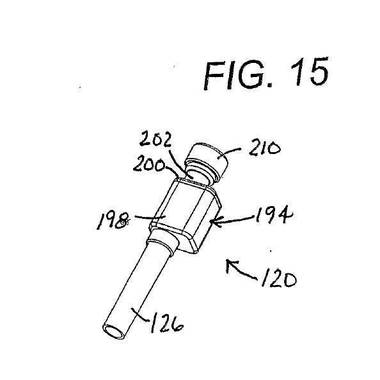
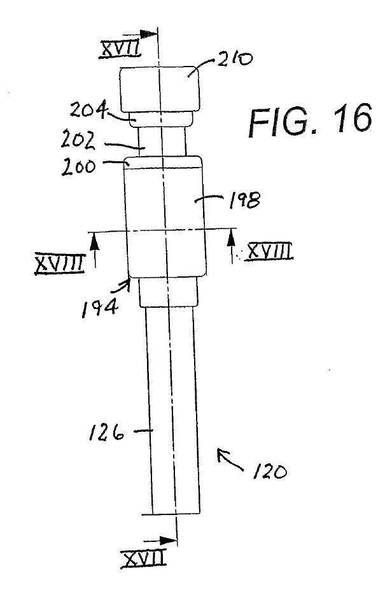
【図15】図1−3、図8−10の腹腔鏡ポートまたはカニューレアセンブリに含まれる、通気弁を伴わないカニューレの斜視図である。
【図16】図16のカニューレの側面拡大図である。
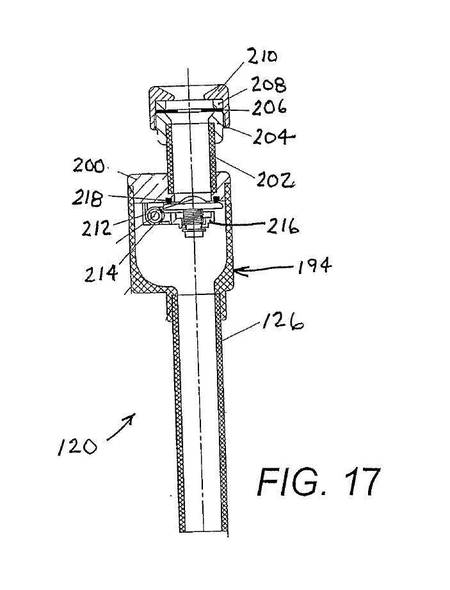
【図17】図16中線XVII−XVIIに沿って取った、図15、16のカニューレの長手方向断面図である。
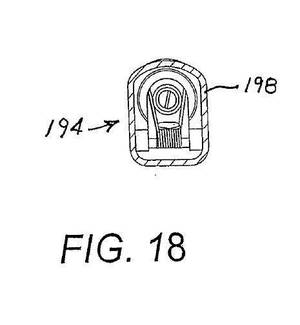
【図18】図16中線XVIII−XVIIIに沿って取った、図15、16のカニューレの横方向断面図である。
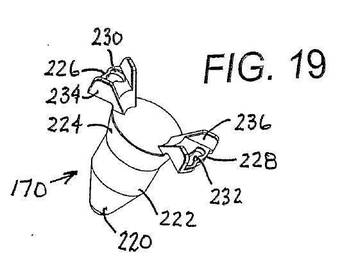
【図19】腹腔鏡手術の開始において患者の中への図4−7のポートホルダーの挿入を容易にするために用いられる挿入プラグの斜視図である。
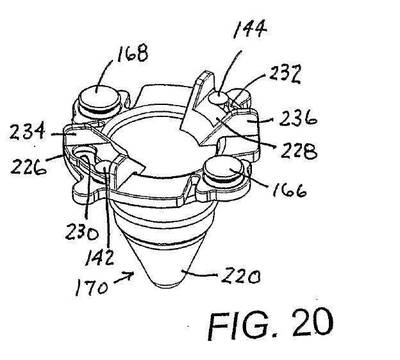
【図20】図4−7のポートホルダーに一時的に挿入され、取り付けられる、図19の挿入プラグの斜視図である。
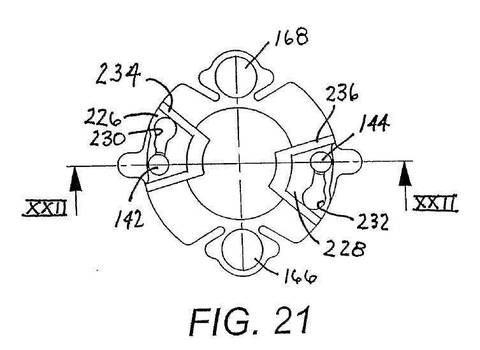
【図21】図20の組み立てられた挿入プラグ及びポートホルダーの平面図である。
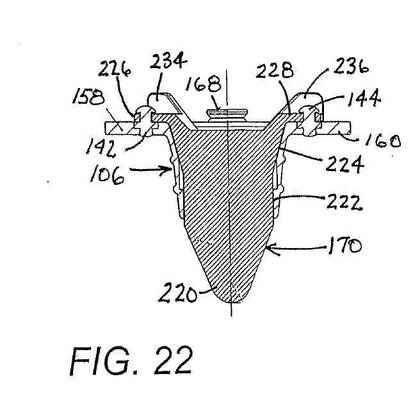
【図22】図21中線XXII−XXIIに沿って取った長手方向断面図である。
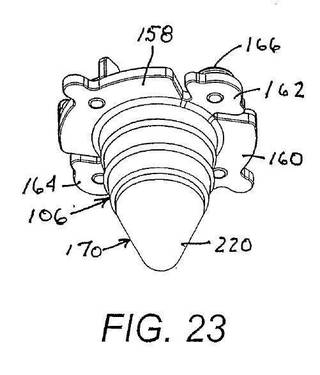
【図23】図20−22の組み立てられた挿入プラグおよびポートホルダーの底面斜視図である。
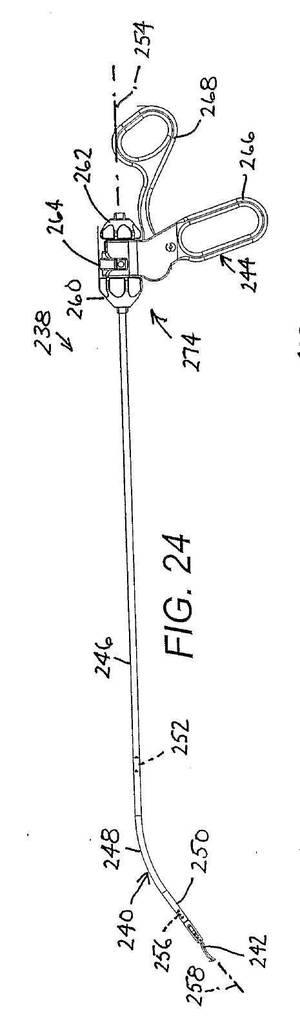
【図24】本発明による図8−10の複数カニューレポートアセンブリとともに利用可能な腹腔鏡器具の側面図である。
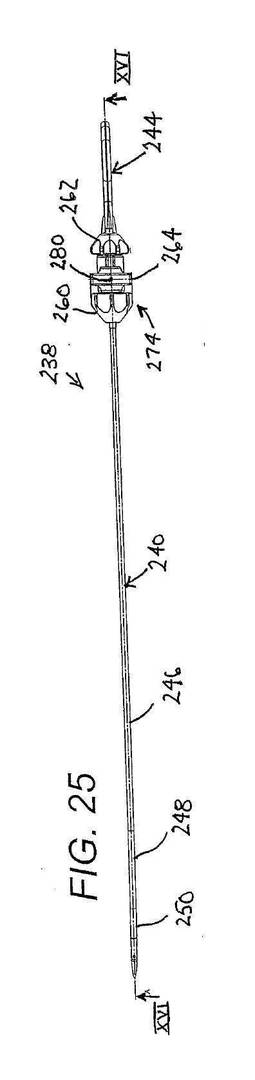
【図25】図24の腹腔鏡器具の平面図である。
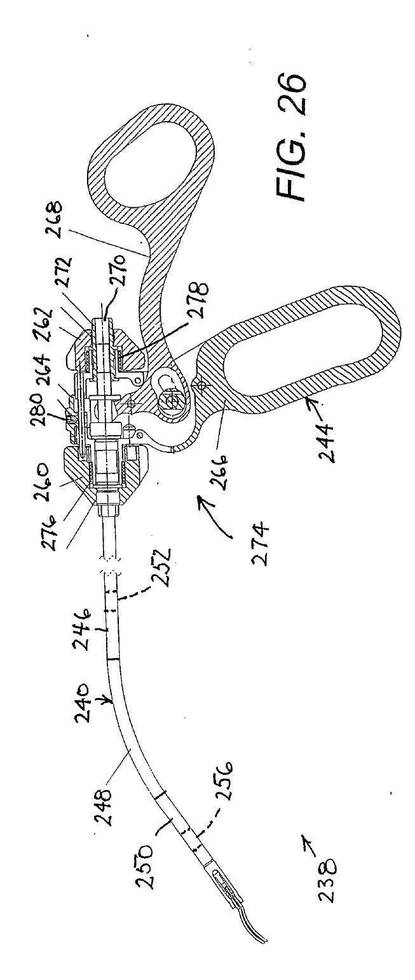
【図26】一部分が側面図であり、一部分が図25中線XXVI−XXVIに沿って取った断面図である。
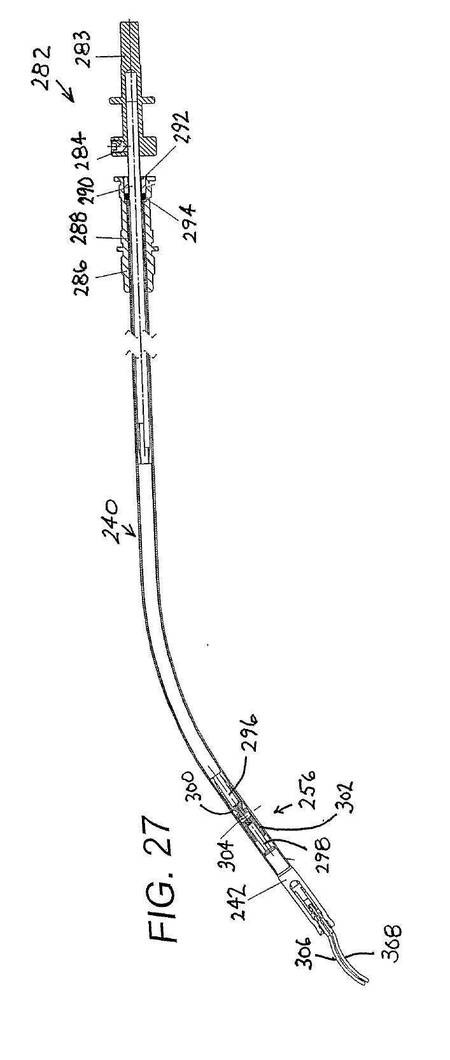
【図27】図25中線XXVI−XXVIに沿って取った部分的な長手方向断面図である。
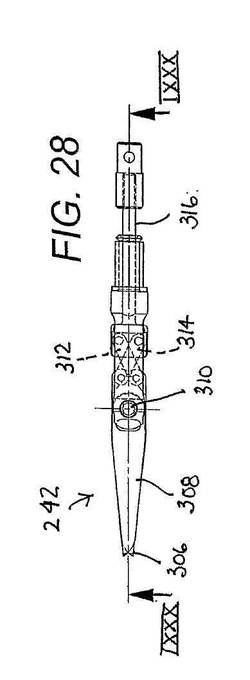
【図28】図24−27の腹腔鏡器具の末端拡大側面図である。
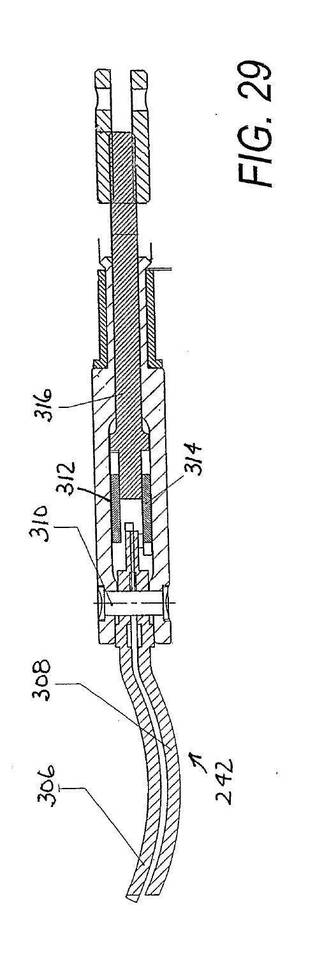
【図29】図28中線IXXX−IXXXに沿って取った長手方向拡大断面図である。
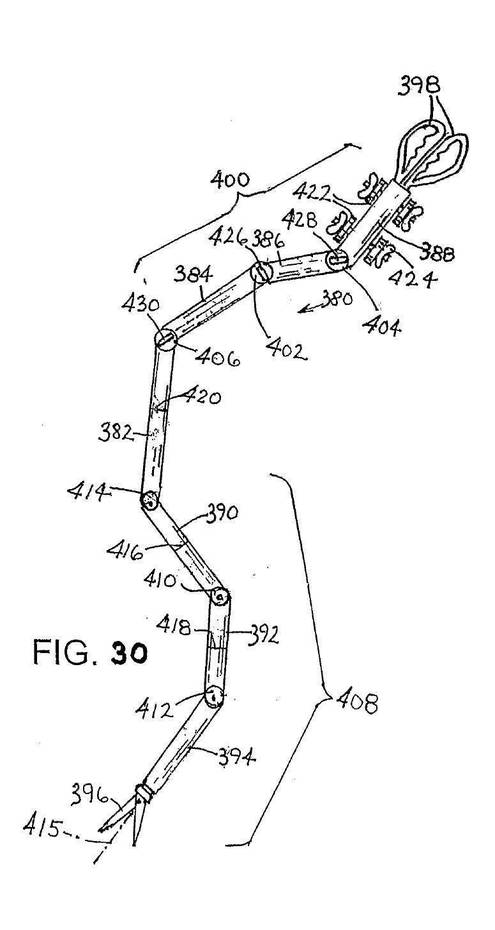
【図30】この発明の腹腔鏡器具の模型図である。
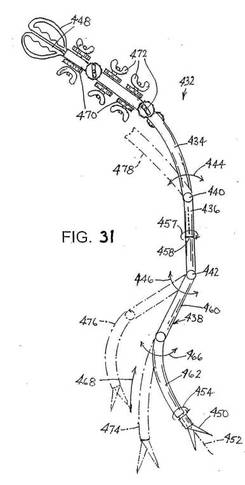
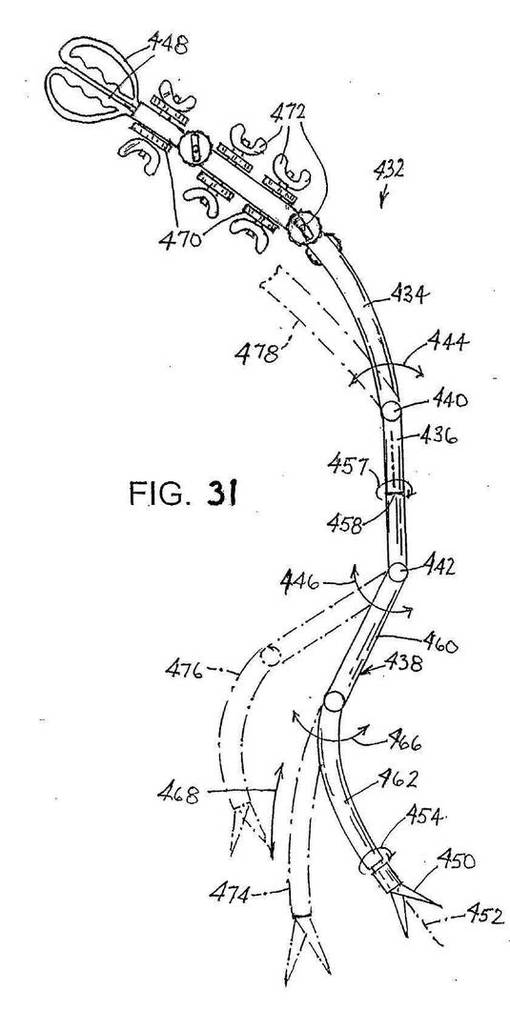
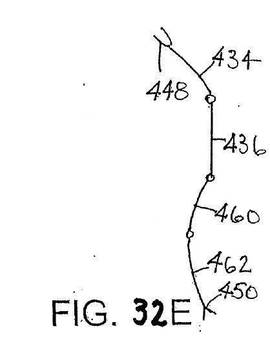
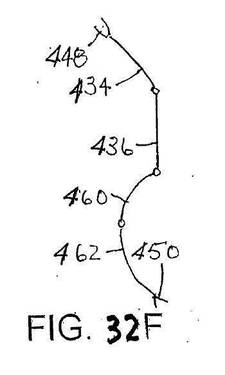
【図31】この発明の別の腹腔鏡器具の模型図である。
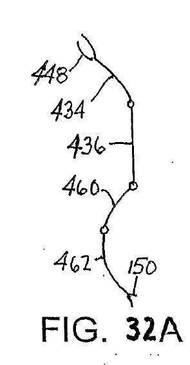
【図32A】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
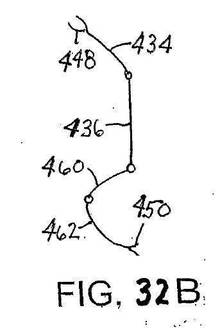
【図32B】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
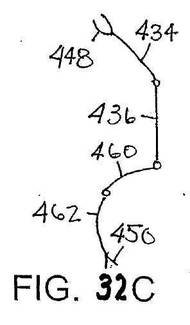
【図32C】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
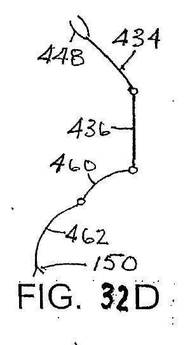
【図32D】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
【図32E】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
【図32F】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
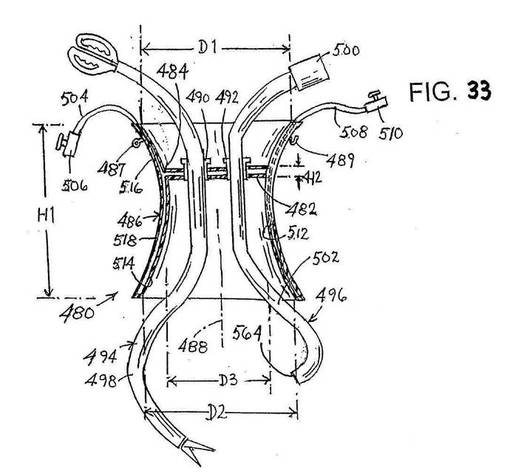
【図33】腹腔鏡器具あるいはカニューレホルダーの模型断面図である。
【発明を実施するための形態】
【0036】
図1〜3に示すように、腹腔鏡ポートまたはカニューレアセンブリ100はカニューレユニット102とそれに随伴するコネクター104とを有しており、コネクターはカニューレユニットを環状ポートホルダー106(図4〜8、10)に着脱可能に締結する。該ホルダーは患者内の開口(例えばヘソに形成された)内に配置される。カニューレユニット102はコネクター104によりホルダー106に連結されており、これによりカニューレユニット102はホルダー106の長軸108(図7、10)について回転する。ポートアセンブリ100が患者の皮膚面内に展開すると、長軸108は患者の皮膚面にほぼ垂直に延在する。
【0037】
カニューレユニット102は基体またはフレーム110を有しており、基体またはフレームはポートホルダー106内に着脱可能に挿入・取付けられる。基体またはフレーム110は閉鎖面または延在する平面SCを画定する平面状のパネルまたは壁112を有している。ポートホルダー106が延在する開口において、閉鎖面は腹腔鏡外科手術中患者の皮膚に対して実質的に接線状に延在する。基体110は台座リング(seating ring)114、密封リング(sealing ring)116を有している。
【0038】
カニューレユニット102は3個のカニューレ部材118、120、122を有しており、各カニューレ部材は基体またはフレーム110に連結されて、それぞれの閉鎖面SCを通るアクセス経路を画定している。各カニューレ部材118、120、122は閉鎖面SCに対して鋭角で延在しており、少なくともポートアセンブリの弛緩または静止形態において腹腔鏡外科手術中カニューレは患者の皮膚に対して傾斜している。カニューレ部材118、120、122は弛緩形態または無強勢状態において線型である可撓性筒状部124、126、128を有している。
【0039】
各カニューレ部材118、120、122は閉鎖面または平面CS(主面)に対して垂直に配列されて基体またはフレーム110の長軸130から離間したそれぞれの面P1、P2、P3(図3)を画定している。これら二次面P1、P2、P3は図3に示したように互いに120度の角度で配置されている。コネクター104はカニューレユニット102に緩く連結されており、基体110とカニューレ118、120、122の弁コンポーネントとの間で、カニューレユニットの軸130に沿って自由に動くことができる。
【0040】
コネクター104は円錐台部132を有しており、これがホルダー106に挿入可能であり(図10)、さらに1対のフランジ134、136を有しており、これらはカニューレユニット102をホルダー106に一時的に錠止する。このために、フランジ134、136は複ローブ長孔138、140を有しており、これらがポートホルダー106上のピンまたは突起142、144を収受する(図4、5、7、8、9)。フランジ134および136はまた対の耳部146、148を有しており、これらは親指と指として機能してコネクター104を軸108(および130)について旋回させ、ポートホルダー106にコネクター106と同時にカニューレユニット102を復元可能に固定する。
【0041】
図4〜7に示すように、ポートホルダー106は傾斜・若干円錐台状のスリーブ150を有しており、その外面に沿って1対の環状ビーズまたはリブ152、154が、また内面に沿って肩156が設けられている。肩はカニューレユニット102の台座リング114のための当接部または静止部(rest)として機能している。スリーブ150の広い方の端部においてホルダー106は1対の直径方向反対のフランジ158、160と1対の直径方向反対の耳162、164を有している。
【0042】
ピンまたは突起142、144はフランジ158、160と固定状態であり、耳162、164は頭部の平らなポスト166、168を支持している。ポストの周りには縫合糸が結合されて患者の皮膚にホルダー106締結する。ゴムガスケット167、169は縫合糸をポスト166、168にクランプする。これに代えて、患者の身体の壁への縫合糸錨止ポートホルダー106は長孔163a、163b、165a、165bを通して挿入されて、耳162、164の基体171、173の周りに部分的に巻かれてもよい(図5)。
【0043】
患者の開口内にホルダー106を配置した(挿入補助部材170をホルダーから除去した後、図19〜22)後、カニューレユニット102の基体またはフレーム110は台座リング114が肩15(図10)に係合するまでホルダー106に挿入される。カニューレユニット110はホルダー106に挿入とホルダー106に対するコネクター104の回転により固定される。これを図8、9に矢印172で示す。これにより突起142、144と長孔138、140は相互錠止される(図8〜10)。爾後コネクター104はホルダー106に錠止され、カニューレユニット102は軸108、130について摩擦の抵抗力と反対の方向に回転され密封リング116により出される。
【0044】
図11〜14に示すように、カニューレユニット118は筒状部124に連結された弁コンポーネント174を有しており、弁コンポーネント124は二酸化炭素ガスを圧力源から患者に導く筒(図示せず)を収受する通気ポート(insufflation port)175を有している。図13に示すように、カニューレ部材118の弁コンポーネント124はカバーまたはクロージャ178を具えて弁ボックスまたはケース(valve box or casing)176を有している。カバーまたはクロージャには延在筒180が取り付けられている。ケース176と反対側の端部において筒180はスリーブ182、弁シール184、ディスク185、キャップ186を有している。弁コンポーネント174はさらに弁ドアー188を有しており、これが、らせん状またはコイルバネ190により図13の閉鎖位置に付勢されている。ドアー188は取り付けブラケットにより支持され、ハードウエア191を伴っている。Oリングシール192は、腹腔鏡外科用器具がカニューレ部材118を横切らないときに、延在筒124を通っての患者からの通気ガスの逃げを禁止する。
【0045】
図1〜3、8〜10に示すように、カニューレ部材120、122はそれぞれ可撓性筒状部126、128に連結された弁コンポーネント194、196を有している。これらの弁コンポーネントは構造的に同じであり、その代表194が図15〜18に示されている。弁コンポーネント194はカバーまたはクロージャ200を具えた弁ボックスまたはケース198を有している。カバーまたはクロージャは延在筒202が取り付けられている。弁ケース198とは反対側の端部において延在筒202はスリーブ204、弁シール206、ディスク208、キャップ210を有している。弁コンポーネント194は、さらにらせん状またはコイルバネ214により図17の閉鎖位置に付勢された弁ドアー212を有している。ドアー212は取り付けブランケットに支持され、ハードウェア216を伴っている。腹腔鏡外科用器具がカニューレ部材120(または122)を横切らないときに、Oリングシール218は患者からの延在筒202を通っての通気ガスの逃げを禁止している。
【0046】
図19に示すように、挿入補助部材170は円錐先端220、筒状中央部222、若干傾斜した円錐状台外部224を有している。外部224は1対のフランジ226、228を有していて、一時的に挿入補助部材170をポートホルダー106に錠止する。このために、フランジ226、228は複ローブ長孔230、232を有していて、図20〜22に示すようにポートホルダー106上のピンまたは突起142、144を収受する。フランジ226、228はそれぞれ1対の上向きの耳234、236を有して形成されており、これらは手動で使用者により係合され、挿入補助部材170をポートホルダー106に原状復帰可能に固定する。
【0047】
患者内に小さな切開または開口が形成されると、ポートホルダー106は連結された挿入補助部材170とともに切開を通って挿入される。縫合糸(図示せず)が患者に縫合され、ポスト166、168に巻き付けられ、縛られ、ポートホルダー106を患者にしっかりと固定する。ついでフランジ226、228のピンまたは突起142、144からの逆回転とホルダー106からの挿入補助部材の分離により挿入補助部材170が除かれる。ついでカニューレユニット102がホルダー106に取り付けられる。
【0048】
図24〜29に示す腹腔鏡外科用器具238は腹腔鏡トロカールスリーブまたは図1〜3、8〜10のポートアセンブリのカニューレ部材118、120、122などのカニューレを通って挿入されて腹腔鏡外科手術を行う。器具238は軸240、軸の一端に配置された作業端242と軸の他端に配置されたグリップ型のアクチュエーター244を有している。アクチュエーター244は作業端242に軸240を介して作動連結されていて、作業端の作用を制御する。
【0049】
軸240は真っ直ぐな基端部246、湾曲した中央部248、真っ直ぐな末端部250を有しており、末端部は基端部に対して0度でない角度で延在する(図24、26、27)。基端部246は第1の回転ジョイント252を有しており、末端部250と作業端242とが基端部246の長軸254について回転可能である。末端部250は第2の回転ジョイント256を有しており、作業端242が末端部の長軸258について回転可能である。回転アクチュエーターまたはノブ260が器具238の基端部に取り付けられて、器具240の基端部246に作動連結されて、末端部250と作業端242とを長軸254について回転させる。他の回転アクチュエーターまたはノブ262は、器具238の基端部に取り付けられて軸240の末端部に作動連結されて、長軸258について作業端242を回転させる。
【0050】
器具の軸240の基端部246、中央部248、末端部250はそれぞれ実質的にすべて剛性でありジョイント252、256についてのみ回転するが曲げられない。軸254、258間の角度は、軸240がホッケースティックを連想させる形状を持つようにする。器具238の他の実施例においては、軸240の中央部248が可撓性で軸240は線型形態と図24、26のホッケースティック形態とを帯びる。この場合、ハンドルアセンブリ274がアクチュエーター(図示せず)とともに設けられて中央部248を曲折可能としてもよい。
【0051】
図24〜26に示すように、器具238は滑動可能なトグルスイッチ264などのさらなるアクチュエーターを有しており、錠止機能を果たすか、軸258に垂直な軸について作業端242を軸転させる。
【0052】
アクチュエーター244は軸240に固定された握体部材266と軸転握体部材268を有している。軸240の基端270はベアリング272内に軸受され、これには回転ノブ262がある。アクチュエーター244、回転ノブ260、262、トグルスイッチ264はハンドルユニット274の一部であって、ヨーク276、278、ストッパーピン278、セットネジ280を有している。
【0053】
図27は、軸アセンブリ282のさらなる部分を示しており、軸アセンブリ282は軸240、スライダー部材283、ソケットセットネジ284、外側ベアリング286、作動バー288、屈曲筒290、リング292、O−リングシール294を有している。
【0054】
回転ジョイント256はジョイント254の代わりであって、図27に示すように、基部ピンまたは内側軸部296、末端ピンまたは内側軸部298、1対の結合要素300、302、横軸連結ピン304を有している。
【0055】
図28、29に示すように、作業端242はピボットピン310を介して末端部250の末端に軸回転に連結された1対のジョー306、308を有しており、ジョー306、308はレバーまたはアーム312、314の作用によりピン310について回転可能である。これらのアームは端部ロッド316の長手方向運動に反応して軸転する。
【0056】
上記のように患者中にカニューレユニット102が展開した後、器具238の作業端242と軸240はカニューレ部材118、120または122を通って挿入可能である。このとき筒124、126または128は曲がって、曲げられた軸240を収受する。軸240の曲がった形状と回転ジョイント252、256は、患者の単一の開口、例えばヘソの単一の開口を通じて延在する複数の腹腔鏡器具を使った腹腔鏡外科手術の挙動を容易にする。該外科手術に際しては、末端部250と作業端242とを軸254について一緒に回転し、作業端を軸258について回転させる。加えて、全体の器具アセンブリはカニューレユニット102を有しており、複数の器具238は同一軸108、130について回転して、複数の作業端242の患者内の外科部位への同時的または連続的アクセスを最適化する。
【0057】
図30に示すように、腹腔鏡トロカールスリーブまたはカニューレを通して挿入可能な独立型腹腔鏡医療器具は複数の剛性筒状セグメントからなる軸380を有しており、該セグメントは中央セグメント382、3個の基端セグメント384、386、388、および3個の末端セグメント390、392、394を含んでいる。図30の器具を使っての腹腔鏡作業中、中央セグメント382は腹腔鏡カニューレ、トロカールスリーブまたは器具ホルダーを横切り、基端セグメント384、386、388は患者の外に置かれ、末端セグメント390、392、394は患者の内に置かれる。
【0058】
作業端396が軸380の一端、より具体的には末端セグメント394の自由端に配置され、アクチュエーターのハンドルまたは握体398が軸の他端、より具体的には基端セグメント388の自由端に配置される。アクチュエーターのハンドル398が作業端396に軸380を介して作動連結されて、作業端の作用を制御する。
【0059】
基端セグメント384、386、388は基端軸部400を形成し、これが独立に曲折可能で例えばC状形態を形成する。基端セグメント384、386、388はジョイントまたは関節402、404を介して相互連結されて、中央セグメント382にはジョイントまたは関節406を介して連結される。
【0060】
末端セグメント390、392、394は末端軸部408を形成し、これが独立に曲折可能で例えばC状形態を形成する。末端セグメント390、392、394はジョイントまたは関節410、412を介して相互連結し、中央セグメント382にはジョイントまたは関節414を介して連結される。
【0061】
作業端396は長軸415について回転可能である。作業端396は末端セグメント390、392または中央セグメント382に沿ってジョイント416、418、420を有することによりさらに回転可能である。基端および末端部の相対回転は各セグメントの長軸について行われる。
【0062】
基端388は隣接する末端セグメント390、392、394間の角度を変更する回転アクチュエーターまたはノブ422を有しており、末端セグメント394に対して作業端396を軸414について回転させる。さらにジョイント416、418および/または420における長軸回転を行わせる。蝶ナット型のクランプ424がノブ422に設けられて、これらのアクチュエーターを弛緩可能に錠止して、隣接する末端セグメント390、392、394間の角度、作業端396の回転位置、ジョイント416、418および/または420における長軸回転を保つ。
【0063】
クランプ要素426、428、430は関節またはジョイント402、404、406に設けられて、中央セグメント382と基端セグメント384、386、388の相対位置を錠止している。これに代えて、さらなるノブと蝶ナット型のクランプ(図示せず)を器具の基端に設けて、隣接セグメント382、384、386、388の対の間の角度を変更してもよい。
【0064】
腹腔鏡外科手術中、作業端396の軸位置は、図30の腹腔鏡器具をスライドして患者の中に出入りさせることで調節できる。例えば中央セグメント382の各カニューレまたはホルダー孔に対する位置を変えればよい。加えて、作業端396の軸位置は末端部390、392、394の相互形態を調節することにより変更できる。
【0065】
強いアーチ状の形態はより浅いアーチを有する形態よりも短い軸の長さを有する。手術部位に対する作業端396の位置のさらなる自由度は軸414についての作業端396の回転可能性とジョイント416、418、420における回転性により与えられる。関節またはジョイント410、412、414により与えられる位置の調節可能性は器具の実用能力を大きく向上させる。
【0066】
図31に示す別の独立型腹腔鏡器具は腹腔鏡トロカールスリーブまたはカニューレを通して挿入可能な軸432を有している。軸432は連続的可撓性の基端部またはセグメント434、剛性の真っ直ぐな中央部またはセグメント436、末端部438を有している。基端部434と末端部436は関節またはジョイント440、442を介して中央部436の反対の端部に連結されている。これにより基端部と末端部とが中央部に対して双方向矢印444、446で示すように横に揺動可能である。中央部436は軸432の全長のおおよそ3分の1を構成する。
【0067】
軸432には基端、つまり基端部434の自由端に1対のグリップ型のアクチュエーター448が設けられており、さらに軸432には、末端、つまり末端部438の自由端においてハサミ、フォーセップ、クランプ、焼灼要素などの作業端450が設けられている。
【0068】
作業端450は双方向矢印454で示すように末端部438の端部に対して長軸452について回転可能である。他の双方向矢印457で示すように、見本として中央部436に沿って設けられた回転ジョイント458のお陰で基端部434と末端部438は互いに長軸456について回転可能である。
【0069】
双方向矢印466で示すように末端部438は関節またはジョイント464を介して互いに軸転連結された2個の部分460、462を有している。最末端部分462は長手方向に連続して曲げることが可能であり、矢印468で示すように無数の滑らかに湾曲した概してC状の形態になる。基端よりの部分460は剛性および線形あるいは実質的に全長に亘って連続して可撓性であり、滑らかにアーチ状の概してC状の形態になることができる。
【0070】
基端部434では線形の基端部に沿って(別に表示せず)、複数のアクチュエータノブ470と錠止要素472とが設けられており、(a)基端部434と末端部438、特に最末端部分462の湾曲程度、(b)部分434、436の間の角度、436、438の間の角度、(c)部分460、462の間の角度、(d)作業端450の軸452についての回転方向と程度、(e)ジョイント458の作用状態により決まる基端部434と末端部438の相対角度位置を制御変更する。
【0071】
例として、最末端部分462の変更位置と湾曲を図31に474で示す。基端部460の変更位置と対応する最末端部分462の変更湾曲を476に点線で示す。中央部436に対する基端部434の代わりの位置を478に点線で示す。
【0072】
図32A〜32Fに図31の器具の、特に末端部438の追加の可能な位置と湾曲を示す。
【0073】
腹腔鏡外科手術中、作業端450の軸位置は図31の腹腔鏡器具を患者の内外にスライドさせることにより調節できる。例えばそれぞれカニューレまたは器具ホルダー孔に対する中央部436の位置を変更する。加えて、作業端450の軸位置は末端部438の形態を調節することにより図32Aから図32Fに示すように変更できる。強いアーチ形態(図32Bおよび図32C)は浅いアーチ(図32A、E)を有する形態よりも短い軸の長さを有する。作業端440の手術部位に対する位置のさらなる自由度は軸452についての作業端450の回転可能性とジョイント458における回転可能性により与えられる。
【0074】
ノブ470と錠止要素472を具えた1以上のアクチュエーターメカニズムは軸432に作動連結されて、末端部462(選択的に部分460)を図面外の方向に曲げる。
【0075】
ノブ470の各々第1の作用に反応して軸432の基端部434が第1のC状形態を帯び、かつノブ470の第2の作用に反応して軸の末端部438(または462)が第2のC状形態を帯びる場合に、C状形態は軸の反対側で対面する。こうして、軸432をおおよそS形状にする。
【0076】
図33に示すように、図30から図32Fを参照して既に述べたようなカニューレおよび腹腔鏡外科用器具向けのホルダー480は、周辺または境界エッジ484と板部材を囲む壁486を具えた板部材482を有している。壁486は目487やフック489などの複数の錨止体を有しており、ホルダー480を縫合糸を介して患者に固定する。
【0077】
壁486はエッジ484に沿い一帯に板部材482に連結されている。壁は長軸488を有しており、板部材482は該長軸に対して実質的に横断延在する。板部材482は複数の開口またはポート部材490、492を有しており、各々の延在腹腔鏡器具494、496を収受する。器具494はS形状の軸498を有するような形態をとることが可能であり、具体的には、図30および図31から32Fを参照して述べた器具の形態をとることができる。器具496は光ファイバーを用いた器具であって、電荷結合素子(CCD)の形態をとるカメラ500と折曲げ可能な軸502を有している。軸502は基端部560と末端部562を有しており、図に示すように独立に連続して滑らかなC状形態に曲げられる。これに代えて軸502は図31の器具の軸432と実質的に同一でもよい。作業端450とジョイント458の既に述べた回転能力は腹腔鏡496からは除かれている。腹腔鏡496は通常の照明孔とイメージレンズ(どちらも図示せず)を具えた作業端564を有している。アクチュエーターは単純のために図33の器具494、496の描写からは除かれている。腹腔鏡496の作業端564を制御するアクチュエーターは従来の照明およびCCDの操作制御の形をとってもよく、CCDは装置の作業端に配置される。
【0078】
ホルダー480は膨張可能なユニットであり、板482と壁186はともに少なくとも部分的に中空で、空気などの圧力流体を収受する。このため、筒504がホルダー480に連結されて、空気を注射器(図示せず)などの圧力源から引き出す。弁506が筒504に設けられており、弁510を具えた第2の筒508がホルダー580に連結されて、二酸化炭素などの通気ガスの貯留器(図示せず)から患者への運搬のための経路を与える。開口512が壁486の内面514に沿って与えられて、筒508を介しての通気ガスの患者への送達を可能としている。
【0079】
壁486は少なくとも板482の高さ寸法H2と同じ高さ寸法H1を有しているか、好ましくは実質的により大きい高さを有している。壁486は、板482に向かって環状のフランジとして延在している2つの端部516および518を有している。板部材482は壁486上端側に配置され、浅い、深いカップ状でそれぞれフランジ516、518を有している。
【0080】
壁486は板482の反対側にフランジ516、518の自由端の内径D1とD2を有する。内径D1、D2は、板482の直径D3、板部材における壁482の内径より大である。その結果、カニューレおよび器具ホルダー480は板482の両側で傾斜形状を有している。図示したように、この傾斜形状は湾曲あるいはアーチの形状を呈する。
本発明は、特定の実施形態および用途の観点で記載されてきたが、当業者であれば、この教示を踏まえることにより、本発明の精神から逸脱したり本発明の範囲を超えたりすることなく、さらなる実施形態および改変を生成し得る。従って、図面および本明細書中の記載は、本発明の理解を容易にするために例として提供されたものとして理解されるべきであり、本発明の範囲を制限するものとして解釈されるべきではない。
【技術分野】
【0001】
この発明は全体にヘソを通しての腹腔鏡手術の実施に役立つ外科用器具、外科ポートアセンブリおよび随伴方法に関するものである。
【背景技術】
【0002】
腹式の腹腔鏡手術は、胆嚢の腹腔鏡除去が従来の(開放的)手術より利益があることが明らかになった、1980年代後半に評判になった。低減された術後回復時間は顕著に術後の苦痛と創傷感染を低減した。改善された見掛けは腹腔鏡手術の充分に確立された利益である。これは主として腹腔鏡外科医の体腔壁の小さな切開を利用して手術を行う能力から生じるものである。
【0003】
腹腔鏡手術においては一般に腹腔内にCO2ガスをおよそ15mmHgの圧力まで吹き込む。腹壁が突通されて、5−10mm直径の真っ直ぐな筒状カニューレまたはトロカールスリーブが腹腔内に挿入される。手術室のモニターに接続された腹腔鏡を使って手術領域を可視化し、腹腔鏡はどれかのトロカールスリーブを通って配置される。腹腔鏡器具(グラスパー、ディセクター、ハサミ、リトラクターなど)は2以上の追加のトロカールスリーブを通って配置され、外科医や助手が操作する。
【0004】
最近所謂「ミニ腹腔鏡」が導入され、2−3mm直径の真っ直ぐなトロカールスリーブと腹腔鏡器具とが使われている。うまくゆくと、ミニ腹腔鏡により腹壁トラウマがさらに低減され見掛けも改善される。しかし、ミニ腹腔鏡作業に使われる器具は一般に高価で脆い。直径が小さく(弱い吸入洗浄システム、乏しい耐性、劣ったビデオ品質)作用に制約があるので、ミニ腹腔鏡器具は一般に好ましい組織構造(薄い空洞壁、少ない粘着性、最小の炎症など)を有した特定の患者にのみ使われる。腹腔鏡作業を必要とする患者の内でそのような患者の率は少ない。加えて、2−3mmの少ない切開でも依然好ましくない見掛けを起こし、創傷合併症も起こす(出血、感染、苦痛、ケロイド形成等)。
【0005】
小さな少ない体腔切開の利益が証明されているので、ヘソへの単一の切開を使って手術を行うことは魅力ある。ヘソは最も薄く血管の通りが最少で、良く隠された腹壁の領域である。ヘソは一般に腹腔鏡手術の好ましい腹腔入口である。
【0006】
顕著に見掛けに妥協したり創傷合併症を増加させることなしに、ヘソ切開は容易に拡大することができる(大きな試料を得るために)。2個以上の標準の(真っ直ぐな)カニューレと腹腔鏡器具をつぎつぎとヘソに配置することは所謂「チョップスティック」効果を招く。これは外科医の両手、外科医の手と器具間、および器具間の干渉である。この干渉により外科医の上記作業を行う能力を大きく低減される。
【0007】
したがって、全体にヘソを通って腹腔鏡作業をでき、しかも「チョップスティック効果」を低減または除去することのできる器具とトロカールシステムが必要となる。この発明の腹腔鏡器具とトロカールシステムを使って、腹腔鏡作業が全体にヘソを通して行われる。これにより必要な診断業務と治療業務が行われ、さらに腹壁のトラウマが最少となり見掛けも改善される。
【発明の概要】
【発明が解決しようとする課題】
【0008】
この発明は外科手術、特に全体にヘソを通しての腹腔鏡作業のための器具とカニューレまたはポートアセンブリを提供するものである。一つには、腹腔鏡作業中に患者の内部器官へのアクセスを容易とする改良されたポートアセンブリを提供するものである。
【0009】
またこの発明は複数の腹腔鏡器具がヘソを通して配置されるときに外科医の手により大きな作業空間を与えるポートアセンブリを提供するものである。ヘソを通しての手術を容易とする改良腹腔鏡器具を提供するものである。
【課題を解決するための手段】
【0010】
この発明の外科ポートアセンブリはこのような腹腔鏡外科作業の挙動を容易にするものであって、カニューレユニットとホルダーとを有しており、カニューレユニットは少なくとも1個のカニューレ部材を有しており、ホルダーは患者の皮膚の開口中に配置可能でカニューレコンポーネントを収受するものである。これにより外科手術中にカニューレコンポーネントはホルダーに対して可動である。好ましくは、カニューレユニットはホルダーに対してホルダーの長軸について回転可能である。ホルダーは手術中患者に締結され、カニューレユニットは患者に対して可動である。
【0011】
この発明の別の特徴によれば、カニューレユニットは基体またはフレームを有しており、該基体またはフレームはホルダーに着脱可能に取り付けられて、閉鎖面を画定している。閉鎖面は外科手術中開口において患者の皮膚に実質的に接線状に延在する。カニューレ部材は基体に連結されて、閉鎖面を通してのアクセス経路を画定する。カニューレ部材は閉鎖面に対して鋭角で延在する。これによりカニューレは少なくともポートアセンブリの緩和(無強勢)または静止形態において患者の皮膚面に対して傾斜している。例えばカニューレを通しての腹腔鏡器具の挿入前に、好ましくは少なくとも外科手術の一部の間そうなるのである。
【0012】
この発明のさらなる特徴によれば、カニューレが可撓性であって、線形である弛緩形態を有している。基体は閉鎖面を形成するパネルまたは壁を有している。
【0013】
一実施例においては、カニューレは複数のカニューレのひとつであり、各カニューレは閉鎖面に対して鋭角で延在している。ポートアセンブリの弛緩または静止形態において、外科手術中カニューレは全て患者の皮膚面に対して傾斜している。
【0014】
この発明の追加の特徴によれば、カニューレユニットは部分的にホルダー内に挿入可能であり、ポートアセンブリはさらにコネクター部材を有している。コネクター部材はカニューレユニットをホルダーに着脱可能に取り付ける。またコネクターはホルダー内に部分的に挿入可能である。
【0015】
ホルダーとコネクター部材とは突起と長孔などの協働錠止要素を有しており、カニューレユニットをホルダーに原状復帰可能に固定する。こうして、患者の開口中へのホルダーの配置後(ホルダーから挿入補助部材の除去後)、カニューレユニットの基体またはフレームがホルダーに挿入されて、コネクターの挿入と回転により固定され、突起と長孔とが錠止される。
【0016】
カニューレユニットの基体またはフレームは円錐台状の部分を有しており、これがホルダーに挿入できる。同様に、コネクターも円錐台状の部分を有しており、これがホルダーに挿入できてカニューレユニットをホルダーに固定する。ホルダーは肩を内部に有しておりこれがカニューレユニットの下部に係合する。
【0017】
上記のように一実施例においては、外科ポートアセンブリが(a)基体またはフレームと(b)カニューレとを有している。基体またはフレームは患者の皮膚内の開口内に配置可能であり、閉鎖面を画定している。閉鎖面は外科手術中に患者の皮膚に対して実質的に接線状に延在する。カニューレは基体に連結されて、閉鎖面を通るアクセス経路を画定する。
【0018】
カニューレは閉鎖面に対して鋭角で延在する。これにより、少なくともポートアセンブリの弛緩または静止形態において外科手術中、カニューレは患者の皮膚面に対して傾斜する。カニューレは複数のカニューレのひとつであり、各カニューレは閉鎖面に対して鋭角で延在する。これにより、少なくともポートアセンブリの弛緩または静止形態において腹腔鏡作業の間、カニューレは全て患者の皮膚面に対して傾斜する。
【0019】
閉鎖面が主面内に配置されている場合には、カニューレは線形形態を有しており、基体またはフレームは長軸を有している。各カニューレはそれぞれ主面に対して垂直に配置された二次面を有している。各二次面は長軸から離間している。カニューレは3個であってもよく、二次面は互いに120度の角度で配置される。
【0020】
この発明の外科方法においては、患者内に開口を形成し、開口を通してカニューレホルダーを挿入し、複数のカニューレをホルダー内に配置する。これによりホルダーの挿入後、カニューレはホルダーを横切り外部から患者内部に延在する。爾後複数の延在医療器具を各カニューレを通って挿入し、カニューレと器具とをホルダーに対してホルダーの長軸について回転する。
【0021】
この発明の別の態様によれば、カニューレが基体部材に取り付けてある場合には、カニューレのホルダー内への配置に際して、基体部材をホルダー内に挿入する。基体部材はホルダーと回転可能に係合する。カニューレのホルダー内への配置に際しては、さらに錠止部材をホルダーに取り付けて、基体部材をホルダーと回転可能係合に保つ。
【0022】
腹腔鏡トロカールスリーブを通して挿入可能なこの発明の腹腔鏡医療器具は、延在軸と、軸の一端に配置された作業端と、軸の他端に配置された第1のアクチュエーターとを有している。
【0023】
アクチュエーターは軸を介して作業端に作動連結されて、作業端の作用を制御する。軸は真っ直ぐな基端部と湾曲した中央部と真っ直ぐな末端部とを有しており、末端部は基端部に対して角度を有して延在する。基端部は第1の回転ジョイントを有しており、これにより末端部と作業端とが基端部の長軸について回転可能となる。
【0024】
末端部は第2の回転ジョイントを有しており、これにより作業端は末端部の長軸について回転可能である。第2のアクチュエーターは作業端とは反対側の軸の端部に配置され、器具の軸の基端部と作動連結されて、その末端部と作業端とを軸の基端部の長軸について回転させる。第3のアクチュエーターは作業端とは反対側の軸の端部に配置され、軸の末端部に作動連結されて、末端部の長軸について作業端を回転させる。
【0025】
器具の軸の基端部、中央部、末端部は実質的に剛性なので曲げることができない。この発明の一実施例においては、器具の軸はホッケースティック形状を有している。2個の腹腔鏡外科用器具のそれぞれはホッケースティック形状を有しており、交差形態で有利に使われる。これにより特に横(内側横方向)運動間は器具の自由度を顕著に改善する。
【0026】
一実施例においては、腹腔鏡トロカールスリーブに挿入可能な独立型腹腔鏡医療器具は、延在軸、作業端、アクチュエーターを有している。作業端は軸の一端に配置され、アクチュエーターは軸の反対側端部に配置され、軸を介して作業端に作動連結されて、作業端の作用を制御する。軸は基端部、中央部、末端部を有しており、少なくとも末端部は独立にC状に曲げることができる。少なくとも軸に沿った一点、好ましくは作業端または作業端近傍で軸の末端セグメントは長軸について回転可能である。
【0027】
この発明の追加の特徴によれば、錠止が軸に作動連結されていて、C状湾曲形態を解放可能に保持する。さらに末端部には関節ジョイントが設けられていて、軸の中央部に対して揺動可能である。基端部はまた独立にC状に曲げることができる。
【0028】
この発明の別の実施例によれば、腹腔鏡トロカールスリーブに挿入可能な独立型腹腔鏡医療器具は延在軸と作業端と手動アクチュエーターとを有している。作業端は軸の一端に配置され、手動アクチュエーターは軸の反対側端部に配置されている。手動アクチュエーターは軸を介して作業端に作動連結されている。第1の機構が軸に作動連結されていて、軸の基端部を第1の方向に曲げる。第2の機構が軸に作動連結されていて、軸の末端部を第1の方向とは異なる第2の方向に曲げる。これにより軸は複数の異なる形状のセグメントを有した形状となる。
【0029】
軸は一端に長軸を有しており、器具はさらに軸に作動連結されて軸について作業端を回転させる回転機構を有している。
【0030】
この発明の別の実施例の別の特徴においては、第1の錠止要素が第1の機構に作動連結されており、第2の錠止要素が第2の機構に作動連結されている。これにより、基端および末端部は異なる形状のセグメントとして保持されることができる。基端および末端部が第1および2の機構により共通面内で折り曲げ可能である。さらに器具には追加の機構が設けられていて、軸に作動連結されて、軸の末端部を面外の追加の方向に折り曲げる。
【0031】
第1の機構の作用に反応して軸の基端部が第1のC状形態を帯び、第2の機構の作用に反応して軸の末端部が第2のC状形態を帯びた場合には、それらのC状形態は軸の反対側で対面する。
【0032】
この発明のさらなる実施例によれば、腹腔鏡医療器具は、延在可撓性軸と、軸の一端に配置された作業端と、軸の他端に配置された手動アクチュエーターとを有しており、手動アクチュエーターは軸を介して作業端に作動連結されており、第1の曲折機構が軸に作動連結されて軸の基端部を第1の方向に曲げ、第2の曲折機構が軸に作動連結されて軸の末端部を第1の方向とは異なる第2の方向に曲げ、これにより軸が複数のアーチ状セグメントを有した形を帯びる。
【0033】
この発明の他の実施例の器具は、さらに軸に作動連結されて軸について作業端を回転させる回転機構と、第1の曲折機構に作動連結された第1の錠止要素と、第2の曲折機構に作動連結された第2の錠止要素とを有している。各曲折機構はその他端で軸に取り付けられた手動アクチュエーターを有している。
【発明の効果】
【0034】
この発明は腹腔鏡外科手術の挙動を容易とするものであって、数個の腹腔鏡器具がそれぞれのカニューレを通して患者内に挿入され、該カニューレは全て患者中の同じ開口、例えばヘソを通って延在する。そのような手術によれば、患者へのトラウマを最小にし、患者の回復を促進するという利点がある。
本発明は、例えば、以下を提供する。
(項目1)
患者の開口内に配置可能な環状ホルダーと、上記ホルダーに着脱可能に取り付けられたカニューレユニットとを有してなり、上記カニューレユニットが上記ホルダーに対してその長軸について回転可能であることを特徴とする外科ポートアセンブリ。
(項目2)
カニューレユニットが基体とカニューレを有しており、上記基体が上記ホルダーに着脱可能に取り付けられて閉鎖面を画定し、外科手術中上記開口において上記閉鎖面が患者の皮膚に対して実質的に接線方向に延在しており、上記カニューレが上記基体に連結されて上記閉鎖面を通ってのアクセス経路を画定しており、上記カニューレが上記閉鎖面に対して鋭角で延在しており、少なくともポートアセンブリの弛緩または静止形態において上記カニューレが患者の皮膚に対して傾斜していることを特徴とする項目1に記載のポートアセンブリ。
(項目3)
上記カニューレが可撓性であることを特徴とする項目2に記載のポートアセンブリ。
(項目4)
上記カニューレが線形である弛緩形態を有していることを特徴とする項目3に記載のポートアセンブリ。
(項目5)
上記基体が上記閉鎖面を形成するパネルまたは壁を有していることを特徴とする項目4に記載のポートアセンブリ。
(項目6)
上記カニューレが複数のカニューレのひとつであり、各カニューレは上記閉鎖面に対して鋭角で延在しており、少なくともポートアセンブリの弛緩または静止形態において全カニューレが患者の皮膚面に対して傾斜していることを特徴とする項目2に記載のポートアセンブリ。
(項目7)
上記カニューレユニットが上記ホルダー内に部分的に挿入可能であることを特徴とする項目1に記載のポートアセンブリ。
(項目8)
さらにコネクター部材が含まれていて、上記コネクター部材は上記カニューレユニットを上記ホルダーに着脱可能に取り付け、上記コネクター部材はまた上記ホルダー内に部分的に挿入可能であることを特徴とする項目7に記載のポートアセンブリ。
(項目9)
上記ホルダーと上記コネクター部材とが協働錠止要素を有していることを特徴とする項目8に記載のポートアセンブリ。
(項目10)
上記錠止要素が上記ホルダーおよび上記コネクター部材のいずれか一方の上に突起を有しており、さらに上記ホルダーおよび上記コネクター部材のもう一方の上に長孔を有していることを特徴とする項目9に記載のポートアセンブリ。
(項目11)
上記カニューレユニットは上記ホルダー内に挿入可能な基体を有しており、上記コネクターは上記ホルダー内に挿入可能な上記カニューレユニットを上記ホルダーに固定する部分を有していることを特徴とする項目8に記載のポートアセンブリ。
(項目12)
上記ホルダーが上記カニューレユニットの下端に係合する肩を内部に有していることを特徴とする項目7に記載のポートアセンブリ。
(項目13)
上記ホルダーが上記基体部材を患者に取外し可能に固定する手段を有していることを特徴とする項目1に記載のポートアセンブリ。
(項目14)
上記カニューレユニットが外科用器具のためのそれぞれのアクセス経路を画定する複数のカニューレ部材を有していることを特徴とする項目1に記載のポートアセンブリ。
(項目15)
患者の皮膚内の開口に配置可能で閉鎖面を画定する基体と、上記基体に連結されて上記閉鎖面を通ってのアクセス経路を画定するカニューレとを有しており、上記開口において外科手術中上記閉鎖面は患者の皮膚に対して実質的に接線方向に延在しており、上記カニューレは上記閉鎖面に対して鋭角で延在し、少なくともポートアセンブリの緩和または静止形態において上記カニューレは患者の皮膚面に対して傾斜していることを特徴とする外科ポートアセンブリ。
(項目16)
上記カニューレが複数のカニューレのひとつであり、上記各カニューレは上記閉鎖面に対して鋭角で延在しており、少なくともポートアセンブリの緩和または静止形態において全てのカニューレが患者の皮膚面に対して傾斜していることを特徴とする項目15に記載のポートアセンブリ。
(項目17)
閉鎖面が主面内に位置しており、上記カニューレが線形形態を有しており、上記各カニューレが上記主面に対して垂直なそれぞれの二次面を画定しており、上記基体が長軸を有しており、上記各二次面が上記長軸から離間していることを特徴とする項目16に記載のポートアセンブリ。
(項目18)
上記カニューレが3個であり、上記二次面が互いに120度の角度で配置されていることを特徴とする項目17に記載のポートアセンブリ。
(項目19)
上記カニューレが可撓性であることを特徴とする項目15に記載のポートアセンブリ。(項目20)
上記カニューレが線形である弛緩または無強勢の形態を有していることを特徴とする項目19に記載のポートアセンブリ。
(項目21)
上記基体が上記閉鎖面を形成するパネルまたは壁を有していることを特徴とする項目15に記載のポートアセンブリ。
(項目22)
さらにコネクター要素が設けられて、上記コネクター要素は上記基体と上記カニューレとをホルダーに着脱可能に取り付け、上記基体とカニューレが上記ホルダーに可動状に取り付けられ、上記ホルダーが外科手術中患者の開口内に配置できることを特徴とする項目15に記載のポートアセンブリ。
(項目23)
患者内の開口に配置可能な基体と、上記基体に連結されて患者内の開口を通るそれぞれのアクセス経路を画定する複数の別個のカニューレ部材とを有してなり、ポートアセンブリの弛緩または静止形態において上記カニューレ部材が互いにおよび上記基体に対して鋭角で配列されていることを特徴とする外科ポートアセンブリ。
(項目24)
上記カニューレ部材が3個であり、互いに120度の角度で配列されていることを特徴とする項目23に記載のポートアセンブリ。
(項目25)
さらにコネクター要素が設けられて、上記コネクター要素は上記基体を上記カニューレ部材とともにホルダーに着脱可能に取り付け、上記基体と上記カニューレが上記ホルダーに可動状に取り付けられ、上記ホルダーが外科手術中患者の開口内に配置可能であることを特徴とする項目23に記載のポートアセンブリ。
(項目26)
患者内に開口を形成し、上記開口を通してカニューレホルダーを挿入し、複数のカニューレを上記ホルダー内に配置し、上記ホルダーの挿入後、上記カニューレが上記ホルダーを横切って患者の外部から患者の内部に延在し、上記開口に上記ホルダーを通した後、複数の延在医療器具を上記各カニューレを通して挿入し、上記カニューレと上記医療器具を上記ホルダーに対して上記ホルダーの長軸について回転することを特徴とする外科方法。
(項目27) 上記カニューレが基体部材に取り付けられ、上記ホルダー内に上記カニューレを配置するに際して上記基体部材を上記ホルダー内に挿入し、上記基体部材が上記ホルダーと回転係合していることを特徴とする項目26に記載の方法。
(項目28)
上記カニューレを上記ホルダー内に配置するに際して、錠止体を上記ホルダーに取り付けて上記基体部材を上記ホルダーとの回転係合に保持することを特徴とする項目27に記載の方法。
(項目29)
腹腔鏡トロカールスリーブを通って挿入可能な腹腔鏡医療器具であって、延在軸と、上記軸の一端に取り付けられた作業端と、上記軸の他端に配置されて上記軸を介して上記作業端に作動連結されて上記作業端の作用を制御する第1のアクチュエーターと、上記軸の他端に取り付けられて基端部に作動連結されて末端部と上記作業端とを上記基端部の長軸について回転させる第2のアクチュエーターと、上記軸の他端に配置されて上記末端部に作動連結されて上記作業端を上記末端部の長軸について回転させる第3のアクチュエーターとを有してなり、上記軸が真直な基端部と湾曲した中央部と真直な末端部とを有しており、上記末端部が上記基端部に対して角度をもって延在しており、上記基端部が第1の回転ジョイントを有しており、上記末端部と上記作業端が上記基端部の長軸について回転可能であり、上記末端部が第2の回転ジョイントを有しており、上記作業端が上記末端部の長軸について回転可能であることを特徴とする医療器具。
(項目30)
上記基端部、上記中央部、上記末端部がそれぞれ全体が剛性であることを特徴とする項目29に記載の医療器具。
(項目31)
上記基端部、上記中央部、上記末端部が一体としてホッケースティック形状であることを特徴とする項目29に記載の医療器具。
(項目32)
腹腔鏡トロカールスリーブを通って挿入可能な独立型腹腔鏡医療器具であって、延在軸と、上記軸の一端に配置された作業端と、上記軸の他端に配置されたアクチュエーターとを有してなり、上記アクチュエーターは上記軸を介して上記作業端に作動連結されて上記作業端の作用を制御し、上記軸は基端部、中央部、末端部を有してなり、少なくとも上記末端部は独立に折曲可能でC状をなし、上記軸の隣接セグメントが器具の軸の少なくともひとつの場所において長軸について相対回転可能であることを特徴とする医療器具。
(項目33)
さらに上記軸に作動連結されてC型湾曲形態を解放可能に維持する錠止を有していることを特徴とする項目32に記載の医療器具。
(項目34)
上記末端部が関節ジョイントを有していることを特徴とする項目32に記載の医療器具。
(項目35)
上記基端部が独立に折曲可能でC状を形成することを特徴とする項目32に記載の医療器具。
(項目36)
腹腔鏡トロカールスリーブを通って挿入可能な独立型腹腔鏡医療器具であって、延在軸と、上記軸の一端に配置された作業端と、上記軸の他端に配置されて上記軸を介して上記作業端に作動連結されたアクチュエーターと、上記軸に作動連結されて上記軸の基端部を第1の方向に折り曲げる第1の機構と、上記軸に作動連結されて上記軸の末端部を上記第1の方向とは異なる第2の方向に折り曲げる第2の機構とを有しており、上記軸が複数の異なる形状セグメントを有した形状を呈していることを特徴とする医療器具。
(項目37)
上記軸が一端に長軸を有しており、さらに回転機構が上記軸に作動連結されて上記長軸について上記作業端を回転させることを特徴とする項目36に記載の医療器具。
(項目38)
さらに上記第1の機構に作動連結されている第1の錠止要素と、上記第2の機構に作動連結されている第2の錠止要素とを有しており、上記基端部、上記末端部は上記異なる形状セグメントとして維持されていることを特徴とする項目36に記載の医療器具。
(項目39)
上記基端部と上記末端部とが共通の面内の上記第1および2の機構により曲折可能であり、さらに追加の機構が上記軸に作動連結されていて、上記軸の末端部を上記面外の追加の方向に曲折することを特徴とする項目36に記載の医療器具。
(項目40)
上記軸の基端部が上記第1の機構の作用に反応して第1のC状形態を帯び、上記軸の末端部が上記第2の機構の作用に反応して第2のC状形態を帯び、上記第1および2のC状形態が上記軸の反対側に面していることを特徴とする項目36に記載の医療器具。
(項目41)
延在可撓性軸と、上記軸の一端に配置された作業端と、上記軸の他端に配置されて上記軸を介して作業端に連結されたアクチュエーターと、上記軸に作動連結されて上記軸の基端部を第1の方向に湾曲させる第1の曲折機構と、上記軸に作動連結されて上記軸の末端部を上記第1の方向と異なる第2の方向に湾曲させる第2の曲折機構とを有してなり、上記軸が複数のアーチ状セグメントを有した形状を帯びることを特徴とする腹腔鏡医療器具。
(項目42)
上記軸が一端に長軸を有しており、さらに上記軸に作動連結されていて上記作業端を上記長軸について回転させる回転機構を有していることを特徴とする項目41に記載の医療器具。
(項目43)
さらに上記第1の曲折機構に作動連結されている第1の錠止要素と、上記第2の曲折機構に作動連結されている第2の錠止要素とを有していることを特徴とする項目41に記載の医療器具。
(項目44)
上記第1および2の曲折機構がそれぞれ上記軸の他端において上記軸に取り付けられた手動アクチュエーターを含んでいることを特徴とする項目41に記載の医療器具。
(項目45)
上記基端部と上記末端部とが共通面内の上記第1および2の曲折機構により曲折可能であり、さらに上記軸に作動連結されて上記軸の末端部を上記面外の追加の方向に曲折する追加の曲折機構を有することを特徴とする項目41に記載の医療器具。
(項目46)
上記軸の基端部が上記第1の曲折機構の作用に反応して第1のC状形態を帯び、上記軸の末端部が上記第2の曲折機構の作用に反応して第2のC状形態を帯び、上記第1および2のC状形態が上記軸の反対側に面していることを特徴とする項目41に記載の医療器具。
【図面の簡単な説明】
【0035】
【図1】多数のカニューレを有したこの発明の腹腔鏡ポートの斜視図である。
【図2】図3中線II−IIに沿って取った、図1の腹腔鏡ポートまたはカニューレアセンブリの断面図である。
【図3】図1の腹腔鏡ポートまたはカニューレアセンブリの平面図である。
【図4】図1〜3の腹腔鏡ポートまたはカニューレアセンブリを受けるための、患者の開口に配置可能な環状ホルダーの斜視図である。
【図5】図4のポートホルダーの平面図である。
【図6】図5中線VI−VIに沿って取った、図4、5のポートホルダーの長手方向断面図である。
【図7】図5中線VII−VIIに沿って取った、図4、5のポートホルダーの別の長手方向断面図である。
【図8】図1−3の腹腔鏡ポートまたはカニューレアセンブリならびに図4−7のポートホルダーの斜視図であり、ポートホルダーに挿入され、取り付けられた、腹腔鏡ポートまたはカニューレアセンブリを示している。
【図9】図8において示されているような図4−7のポートホルダーに連結された図1−3の腹腔鏡ポートまたはカニューレアセンブリの平面図である。
【図10】図9中線X−Xに沿って取った長手方向断面図である。
【図11】図1−3および図8−10の腹腔鏡ポートまたはカニューレアセンブリに含まれる、通気弁を有するカニューレの斜視図である。
【図12】図11のカニューレの側面拡大図である。
【図13】図12中線XIII−XIIIに沿って取った、図11、12のカニューレの長手方向断面図である。
【図14】図12中線XIV−XIVに沿って取った、図11、12のカニューレの横方向断面図である。
【図15】図1−3、図8−10の腹腔鏡ポートまたはカニューレアセンブリに含まれる、通気弁を伴わないカニューレの斜視図である。
【図16】図16のカニューレの側面拡大図である。
【図17】図16中線XVII−XVIIに沿って取った、図15、16のカニューレの長手方向断面図である。
【図18】図16中線XVIII−XVIIIに沿って取った、図15、16のカニューレの横方向断面図である。
【図19】腹腔鏡手術の開始において患者の中への図4−7のポートホルダーの挿入を容易にするために用いられる挿入プラグの斜視図である。
【図20】図4−7のポートホルダーに一時的に挿入され、取り付けられる、図19の挿入プラグの斜視図である。
【図21】図20の組み立てられた挿入プラグ及びポートホルダーの平面図である。
【図22】図21中線XXII−XXIIに沿って取った長手方向断面図である。
【図23】図20−22の組み立てられた挿入プラグおよびポートホルダーの底面斜視図である。
【図24】本発明による図8−10の複数カニューレポートアセンブリとともに利用可能な腹腔鏡器具の側面図である。
【図25】図24の腹腔鏡器具の平面図である。
【図26】一部分が側面図であり、一部分が図25中線XXVI−XXVIに沿って取った断面図である。
【図27】図25中線XXVI−XXVIに沿って取った部分的な長手方向断面図である。
【図28】図24−27の腹腔鏡器具の末端拡大側面図である。
【図29】図28中線IXXX−IXXXに沿って取った長手方向拡大断面図である。
【図30】この発明の腹腔鏡器具の模型図である。
【図31】この発明の別の腹腔鏡器具の模型図である。
【図32A】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
【図32B】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
【図32C】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
【図32D】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
【図32E】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
【図32F】図32A−32Fは、図31の器具のダイアグラムであり、器具の異なる可能な作動形態を示している。
【図33】腹腔鏡器具あるいはカニューレホルダーの模型断面図である。
【発明を実施するための形態】
【0036】
図1〜3に示すように、腹腔鏡ポートまたはカニューレアセンブリ100はカニューレユニット102とそれに随伴するコネクター104とを有しており、コネクターはカニューレユニットを環状ポートホルダー106(図4〜8、10)に着脱可能に締結する。該ホルダーは患者内の開口(例えばヘソに形成された)内に配置される。カニューレユニット102はコネクター104によりホルダー106に連結されており、これによりカニューレユニット102はホルダー106の長軸108(図7、10)について回転する。ポートアセンブリ100が患者の皮膚面内に展開すると、長軸108は患者の皮膚面にほぼ垂直に延在する。
【0037】
カニューレユニット102は基体またはフレーム110を有しており、基体またはフレームはポートホルダー106内に着脱可能に挿入・取付けられる。基体またはフレーム110は閉鎖面または延在する平面SCを画定する平面状のパネルまたは壁112を有している。ポートホルダー106が延在する開口において、閉鎖面は腹腔鏡外科手術中患者の皮膚に対して実質的に接線状に延在する。基体110は台座リング(seating ring)114、密封リング(sealing ring)116を有している。
【0038】
カニューレユニット102は3個のカニューレ部材118、120、122を有しており、各カニューレ部材は基体またはフレーム110に連結されて、それぞれの閉鎖面SCを通るアクセス経路を画定している。各カニューレ部材118、120、122は閉鎖面SCに対して鋭角で延在しており、少なくともポートアセンブリの弛緩または静止形態において腹腔鏡外科手術中カニューレは患者の皮膚に対して傾斜している。カニューレ部材118、120、122は弛緩形態または無強勢状態において線型である可撓性筒状部124、126、128を有している。
【0039】
各カニューレ部材118、120、122は閉鎖面または平面CS(主面)に対して垂直に配列されて基体またはフレーム110の長軸130から離間したそれぞれの面P1、P2、P3(図3)を画定している。これら二次面P1、P2、P3は図3に示したように互いに120度の角度で配置されている。コネクター104はカニューレユニット102に緩く連結されており、基体110とカニューレ118、120、122の弁コンポーネントとの間で、カニューレユニットの軸130に沿って自由に動くことができる。
【0040】
コネクター104は円錐台部132を有しており、これがホルダー106に挿入可能であり(図10)、さらに1対のフランジ134、136を有しており、これらはカニューレユニット102をホルダー106に一時的に錠止する。このために、フランジ134、136は複ローブ長孔138、140を有しており、これらがポートホルダー106上のピンまたは突起142、144を収受する(図4、5、7、8、9)。フランジ134および136はまた対の耳部146、148を有しており、これらは親指と指として機能してコネクター104を軸108(および130)について旋回させ、ポートホルダー106にコネクター106と同時にカニューレユニット102を復元可能に固定する。
【0041】
図4〜7に示すように、ポートホルダー106は傾斜・若干円錐台状のスリーブ150を有しており、その外面に沿って1対の環状ビーズまたはリブ152、154が、また内面に沿って肩156が設けられている。肩はカニューレユニット102の台座リング114のための当接部または静止部(rest)として機能している。スリーブ150の広い方の端部においてホルダー106は1対の直径方向反対のフランジ158、160と1対の直径方向反対の耳162、164を有している。
【0042】
ピンまたは突起142、144はフランジ158、160と固定状態であり、耳162、164は頭部の平らなポスト166、168を支持している。ポストの周りには縫合糸が結合されて患者の皮膚にホルダー106締結する。ゴムガスケット167、169は縫合糸をポスト166、168にクランプする。これに代えて、患者の身体の壁への縫合糸錨止ポートホルダー106は長孔163a、163b、165a、165bを通して挿入されて、耳162、164の基体171、173の周りに部分的に巻かれてもよい(図5)。
【0043】
患者の開口内にホルダー106を配置した(挿入補助部材170をホルダーから除去した後、図19〜22)後、カニューレユニット102の基体またはフレーム110は台座リング114が肩15(図10)に係合するまでホルダー106に挿入される。カニューレユニット110はホルダー106に挿入とホルダー106に対するコネクター104の回転により固定される。これを図8、9に矢印172で示す。これにより突起142、144と長孔138、140は相互錠止される(図8〜10)。爾後コネクター104はホルダー106に錠止され、カニューレユニット102は軸108、130について摩擦の抵抗力と反対の方向に回転され密封リング116により出される。
【0044】
図11〜14に示すように、カニューレユニット118は筒状部124に連結された弁コンポーネント174を有しており、弁コンポーネント124は二酸化炭素ガスを圧力源から患者に導く筒(図示せず)を収受する通気ポート(insufflation port)175を有している。図13に示すように、カニューレ部材118の弁コンポーネント124はカバーまたはクロージャ178を具えて弁ボックスまたはケース(valve box or casing)176を有している。カバーまたはクロージャには延在筒180が取り付けられている。ケース176と反対側の端部において筒180はスリーブ182、弁シール184、ディスク185、キャップ186を有している。弁コンポーネント174はさらに弁ドアー188を有しており、これが、らせん状またはコイルバネ190により図13の閉鎖位置に付勢されている。ドアー188は取り付けブラケットにより支持され、ハードウエア191を伴っている。Oリングシール192は、腹腔鏡外科用器具がカニューレ部材118を横切らないときに、延在筒124を通っての患者からの通気ガスの逃げを禁止する。
【0045】
図1〜3、8〜10に示すように、カニューレ部材120、122はそれぞれ可撓性筒状部126、128に連結された弁コンポーネント194、196を有している。これらの弁コンポーネントは構造的に同じであり、その代表194が図15〜18に示されている。弁コンポーネント194はカバーまたはクロージャ200を具えた弁ボックスまたはケース198を有している。カバーまたはクロージャは延在筒202が取り付けられている。弁ケース198とは反対側の端部において延在筒202はスリーブ204、弁シール206、ディスク208、キャップ210を有している。弁コンポーネント194は、さらにらせん状またはコイルバネ214により図17の閉鎖位置に付勢された弁ドアー212を有している。ドアー212は取り付けブランケットに支持され、ハードウェア216を伴っている。腹腔鏡外科用器具がカニューレ部材120(または122)を横切らないときに、Oリングシール218は患者からの延在筒202を通っての通気ガスの逃げを禁止している。
【0046】
図19に示すように、挿入補助部材170は円錐先端220、筒状中央部222、若干傾斜した円錐状台外部224を有している。外部224は1対のフランジ226、228を有していて、一時的に挿入補助部材170をポートホルダー106に錠止する。このために、フランジ226、228は複ローブ長孔230、232を有していて、図20〜22に示すようにポートホルダー106上のピンまたは突起142、144を収受する。フランジ226、228はそれぞれ1対の上向きの耳234、236を有して形成されており、これらは手動で使用者により係合され、挿入補助部材170をポートホルダー106に原状復帰可能に固定する。
【0047】
患者内に小さな切開または開口が形成されると、ポートホルダー106は連結された挿入補助部材170とともに切開を通って挿入される。縫合糸(図示せず)が患者に縫合され、ポスト166、168に巻き付けられ、縛られ、ポートホルダー106を患者にしっかりと固定する。ついでフランジ226、228のピンまたは突起142、144からの逆回転とホルダー106からの挿入補助部材の分離により挿入補助部材170が除かれる。ついでカニューレユニット102がホルダー106に取り付けられる。
【0048】
図24〜29に示す腹腔鏡外科用器具238は腹腔鏡トロカールスリーブまたは図1〜3、8〜10のポートアセンブリのカニューレ部材118、120、122などのカニューレを通って挿入されて腹腔鏡外科手術を行う。器具238は軸240、軸の一端に配置された作業端242と軸の他端に配置されたグリップ型のアクチュエーター244を有している。アクチュエーター244は作業端242に軸240を介して作動連結されていて、作業端の作用を制御する。
【0049】
軸240は真っ直ぐな基端部246、湾曲した中央部248、真っ直ぐな末端部250を有しており、末端部は基端部に対して0度でない角度で延在する(図24、26、27)。基端部246は第1の回転ジョイント252を有しており、末端部250と作業端242とが基端部246の長軸254について回転可能である。末端部250は第2の回転ジョイント256を有しており、作業端242が末端部の長軸258について回転可能である。回転アクチュエーターまたはノブ260が器具238の基端部に取り付けられて、器具240の基端部246に作動連結されて、末端部250と作業端242とを長軸254について回転させる。他の回転アクチュエーターまたはノブ262は、器具238の基端部に取り付けられて軸240の末端部に作動連結されて、長軸258について作業端242を回転させる。
【0050】
器具の軸240の基端部246、中央部248、末端部250はそれぞれ実質的にすべて剛性でありジョイント252、256についてのみ回転するが曲げられない。軸254、258間の角度は、軸240がホッケースティックを連想させる形状を持つようにする。器具238の他の実施例においては、軸240の中央部248が可撓性で軸240は線型形態と図24、26のホッケースティック形態とを帯びる。この場合、ハンドルアセンブリ274がアクチュエーター(図示せず)とともに設けられて中央部248を曲折可能としてもよい。
【0051】
図24〜26に示すように、器具238は滑動可能なトグルスイッチ264などのさらなるアクチュエーターを有しており、錠止機能を果たすか、軸258に垂直な軸について作業端242を軸転させる。
【0052】
アクチュエーター244は軸240に固定された握体部材266と軸転握体部材268を有している。軸240の基端270はベアリング272内に軸受され、これには回転ノブ262がある。アクチュエーター244、回転ノブ260、262、トグルスイッチ264はハンドルユニット274の一部であって、ヨーク276、278、ストッパーピン278、セットネジ280を有している。
【0053】
図27は、軸アセンブリ282のさらなる部分を示しており、軸アセンブリ282は軸240、スライダー部材283、ソケットセットネジ284、外側ベアリング286、作動バー288、屈曲筒290、リング292、O−リングシール294を有している。
【0054】
回転ジョイント256はジョイント254の代わりであって、図27に示すように、基部ピンまたは内側軸部296、末端ピンまたは内側軸部298、1対の結合要素300、302、横軸連結ピン304を有している。
【0055】
図28、29に示すように、作業端242はピボットピン310を介して末端部250の末端に軸回転に連結された1対のジョー306、308を有しており、ジョー306、308はレバーまたはアーム312、314の作用によりピン310について回転可能である。これらのアームは端部ロッド316の長手方向運動に反応して軸転する。
【0056】
上記のように患者中にカニューレユニット102が展開した後、器具238の作業端242と軸240はカニューレ部材118、120または122を通って挿入可能である。このとき筒124、126または128は曲がって、曲げられた軸240を収受する。軸240の曲がった形状と回転ジョイント252、256は、患者の単一の開口、例えばヘソの単一の開口を通じて延在する複数の腹腔鏡器具を使った腹腔鏡外科手術の挙動を容易にする。該外科手術に際しては、末端部250と作業端242とを軸254について一緒に回転し、作業端を軸258について回転させる。加えて、全体の器具アセンブリはカニューレユニット102を有しており、複数の器具238は同一軸108、130について回転して、複数の作業端242の患者内の外科部位への同時的または連続的アクセスを最適化する。
【0057】
図30に示すように、腹腔鏡トロカールスリーブまたはカニューレを通して挿入可能な独立型腹腔鏡医療器具は複数の剛性筒状セグメントからなる軸380を有しており、該セグメントは中央セグメント382、3個の基端セグメント384、386、388、および3個の末端セグメント390、392、394を含んでいる。図30の器具を使っての腹腔鏡作業中、中央セグメント382は腹腔鏡カニューレ、トロカールスリーブまたは器具ホルダーを横切り、基端セグメント384、386、388は患者の外に置かれ、末端セグメント390、392、394は患者の内に置かれる。
【0058】
作業端396が軸380の一端、より具体的には末端セグメント394の自由端に配置され、アクチュエーターのハンドルまたは握体398が軸の他端、より具体的には基端セグメント388の自由端に配置される。アクチュエーターのハンドル398が作業端396に軸380を介して作動連結されて、作業端の作用を制御する。
【0059】
基端セグメント384、386、388は基端軸部400を形成し、これが独立に曲折可能で例えばC状形態を形成する。基端セグメント384、386、388はジョイントまたは関節402、404を介して相互連結されて、中央セグメント382にはジョイントまたは関節406を介して連結される。
【0060】
末端セグメント390、392、394は末端軸部408を形成し、これが独立に曲折可能で例えばC状形態を形成する。末端セグメント390、392、394はジョイントまたは関節410、412を介して相互連結し、中央セグメント382にはジョイントまたは関節414を介して連結される。
【0061】
作業端396は長軸415について回転可能である。作業端396は末端セグメント390、392または中央セグメント382に沿ってジョイント416、418、420を有することによりさらに回転可能である。基端および末端部の相対回転は各セグメントの長軸について行われる。
【0062】
基端388は隣接する末端セグメント390、392、394間の角度を変更する回転アクチュエーターまたはノブ422を有しており、末端セグメント394に対して作業端396を軸414について回転させる。さらにジョイント416、418および/または420における長軸回転を行わせる。蝶ナット型のクランプ424がノブ422に設けられて、これらのアクチュエーターを弛緩可能に錠止して、隣接する末端セグメント390、392、394間の角度、作業端396の回転位置、ジョイント416、418および/または420における長軸回転を保つ。
【0063】
クランプ要素426、428、430は関節またはジョイント402、404、406に設けられて、中央セグメント382と基端セグメント384、386、388の相対位置を錠止している。これに代えて、さらなるノブと蝶ナット型のクランプ(図示せず)を器具の基端に設けて、隣接セグメント382、384、386、388の対の間の角度を変更してもよい。
【0064】
腹腔鏡外科手術中、作業端396の軸位置は、図30の腹腔鏡器具をスライドして患者の中に出入りさせることで調節できる。例えば中央セグメント382の各カニューレまたはホルダー孔に対する位置を変えればよい。加えて、作業端396の軸位置は末端部390、392、394の相互形態を調節することにより変更できる。
【0065】
強いアーチ状の形態はより浅いアーチを有する形態よりも短い軸の長さを有する。手術部位に対する作業端396の位置のさらなる自由度は軸414についての作業端396の回転可能性とジョイント416、418、420における回転性により与えられる。関節またはジョイント410、412、414により与えられる位置の調節可能性は器具の実用能力を大きく向上させる。
【0066】
図31に示す別の独立型腹腔鏡器具は腹腔鏡トロカールスリーブまたはカニューレを通して挿入可能な軸432を有している。軸432は連続的可撓性の基端部またはセグメント434、剛性の真っ直ぐな中央部またはセグメント436、末端部438を有している。基端部434と末端部436は関節またはジョイント440、442を介して中央部436の反対の端部に連結されている。これにより基端部と末端部とが中央部に対して双方向矢印444、446で示すように横に揺動可能である。中央部436は軸432の全長のおおよそ3分の1を構成する。
【0067】
軸432には基端、つまり基端部434の自由端に1対のグリップ型のアクチュエーター448が設けられており、さらに軸432には、末端、つまり末端部438の自由端においてハサミ、フォーセップ、クランプ、焼灼要素などの作業端450が設けられている。
【0068】
作業端450は双方向矢印454で示すように末端部438の端部に対して長軸452について回転可能である。他の双方向矢印457で示すように、見本として中央部436に沿って設けられた回転ジョイント458のお陰で基端部434と末端部438は互いに長軸456について回転可能である。
【0069】
双方向矢印466で示すように末端部438は関節またはジョイント464を介して互いに軸転連結された2個の部分460、462を有している。最末端部分462は長手方向に連続して曲げることが可能であり、矢印468で示すように無数の滑らかに湾曲した概してC状の形態になる。基端よりの部分460は剛性および線形あるいは実質的に全長に亘って連続して可撓性であり、滑らかにアーチ状の概してC状の形態になることができる。
【0070】
基端部434では線形の基端部に沿って(別に表示せず)、複数のアクチュエータノブ470と錠止要素472とが設けられており、(a)基端部434と末端部438、特に最末端部分462の湾曲程度、(b)部分434、436の間の角度、436、438の間の角度、(c)部分460、462の間の角度、(d)作業端450の軸452についての回転方向と程度、(e)ジョイント458の作用状態により決まる基端部434と末端部438の相対角度位置を制御変更する。
【0071】
例として、最末端部分462の変更位置と湾曲を図31に474で示す。基端部460の変更位置と対応する最末端部分462の変更湾曲を476に点線で示す。中央部436に対する基端部434の代わりの位置を478に点線で示す。
【0072】
図32A〜32Fに図31の器具の、特に末端部438の追加の可能な位置と湾曲を示す。
【0073】
腹腔鏡外科手術中、作業端450の軸位置は図31の腹腔鏡器具を患者の内外にスライドさせることにより調節できる。例えばそれぞれカニューレまたは器具ホルダー孔に対する中央部436の位置を変更する。加えて、作業端450の軸位置は末端部438の形態を調節することにより図32Aから図32Fに示すように変更できる。強いアーチ形態(図32Bおよび図32C)は浅いアーチ(図32A、E)を有する形態よりも短い軸の長さを有する。作業端440の手術部位に対する位置のさらなる自由度は軸452についての作業端450の回転可能性とジョイント458における回転可能性により与えられる。
【0074】
ノブ470と錠止要素472を具えた1以上のアクチュエーターメカニズムは軸432に作動連結されて、末端部462(選択的に部分460)を図面外の方向に曲げる。
【0075】
ノブ470の各々第1の作用に反応して軸432の基端部434が第1のC状形態を帯び、かつノブ470の第2の作用に反応して軸の末端部438(または462)が第2のC状形態を帯びる場合に、C状形態は軸の反対側で対面する。こうして、軸432をおおよそS形状にする。
【0076】
図33に示すように、図30から図32Fを参照して既に述べたようなカニューレおよび腹腔鏡外科用器具向けのホルダー480は、周辺または境界エッジ484と板部材を囲む壁486を具えた板部材482を有している。壁486は目487やフック489などの複数の錨止体を有しており、ホルダー480を縫合糸を介して患者に固定する。
【0077】
壁486はエッジ484に沿い一帯に板部材482に連結されている。壁は長軸488を有しており、板部材482は該長軸に対して実質的に横断延在する。板部材482は複数の開口またはポート部材490、492を有しており、各々の延在腹腔鏡器具494、496を収受する。器具494はS形状の軸498を有するような形態をとることが可能であり、具体的には、図30および図31から32Fを参照して述べた器具の形態をとることができる。器具496は光ファイバーを用いた器具であって、電荷結合素子(CCD)の形態をとるカメラ500と折曲げ可能な軸502を有している。軸502は基端部560と末端部562を有しており、図に示すように独立に連続して滑らかなC状形態に曲げられる。これに代えて軸502は図31の器具の軸432と実質的に同一でもよい。作業端450とジョイント458の既に述べた回転能力は腹腔鏡496からは除かれている。腹腔鏡496は通常の照明孔とイメージレンズ(どちらも図示せず)を具えた作業端564を有している。アクチュエーターは単純のために図33の器具494、496の描写からは除かれている。腹腔鏡496の作業端564を制御するアクチュエーターは従来の照明およびCCDの操作制御の形をとってもよく、CCDは装置の作業端に配置される。
【0078】
ホルダー480は膨張可能なユニットであり、板482と壁186はともに少なくとも部分的に中空で、空気などの圧力流体を収受する。このため、筒504がホルダー480に連結されて、空気を注射器(図示せず)などの圧力源から引き出す。弁506が筒504に設けられており、弁510を具えた第2の筒508がホルダー580に連結されて、二酸化炭素などの通気ガスの貯留器(図示せず)から患者への運搬のための経路を与える。開口512が壁486の内面514に沿って与えられて、筒508を介しての通気ガスの患者への送達を可能としている。
【0079】
壁486は少なくとも板482の高さ寸法H2と同じ高さ寸法H1を有しているか、好ましくは実質的により大きい高さを有している。壁486は、板482に向かって環状のフランジとして延在している2つの端部516および518を有している。板部材482は壁486上端側に配置され、浅い、深いカップ状でそれぞれフランジ516、518を有している。
【0080】
壁486は板482の反対側にフランジ516、518の自由端の内径D1とD2を有する。内径D1、D2は、板482の直径D3、板部材における壁482の内径より大である。その結果、カニューレおよび器具ホルダー480は板482の両側で傾斜形状を有している。図示したように、この傾斜形状は湾曲あるいはアーチの形状を呈する。
本発明は、特定の実施形態および用途の観点で記載されてきたが、当業者であれば、この教示を踏まえることにより、本発明の精神から逸脱したり本発明の範囲を超えたりすることなく、さらなる実施形態および改変を生成し得る。従って、図面および本明細書中の記載は、本発明の理解を容易にするために例として提供されたものとして理解されるべきであり、本発明の範囲を制限するものとして解釈されるべきではない。
【特許請求の範囲】
【請求項1】
本願明細書に記載された発明。
【請求項1】
本願明細書に記載された発明。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32A】
【図32B】
【図32C】
【図32D】
【図32E】
【図32F】
【図33】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32A】
【図32B】
【図32C】
【図32D】
【図32E】
【図32F】
【図33】
【公開番号】特開2013−6050(P2013−6050A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2012−195187(P2012−195187)
【出願日】平成24年9月5日(2012.9.5)
【分割の表示】特願2011−108822(P2011−108822)の分割
【原出願日】平成17年7月12日(2005.7.12)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成24年9月5日(2012.9.5)
【分割の表示】特願2011−108822(P2011−108822)の分割
【原出願日】平成17年7月12日(2005.7.12)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]