
自らの位置を検出する移動端末、カメラ及びプログラム
【課題】環境側システムによって移動体の位置が特定されることなく、且つ、環境側システムに依存することなく、自らの位置を検出することができる移動端末等を提供する。
【解決手段】当該移動端末を所持する移動体を含む環境を撮影した画像情報から抽出され、移動体に任意に付与された移動体IDと、移動体の位置座標とを含む2次元マップを受信する2次元マップ受信部と、移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する軌跡抽出部と、当該移動端末の加速度データを出力するセンサ部と、加速度データから、時間区間毎に当該移動端末の振る舞い情報を検出する振る舞い検出部と、同一の時間区間について振る舞い情報と特異ベクトルの変化とが一致する場合に、特異ベクトルの移動体の位置が当該移動端末の位置であると判定する照合部とを有する。
【解決手段】当該移動端末を所持する移動体を含む環境を撮影した画像情報から抽出され、移動体に任意に付与された移動体IDと、移動体の位置座標とを含む2次元マップを受信する2次元マップ受信部と、移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する軌跡抽出部と、当該移動端末の加速度データを出力するセンサ部と、加速度データから、時間区間毎に当該移動端末の振る舞い情報を検出する振る舞い検出部と、同一の時間区間について振る舞い情報と特異ベクトルの変化とが一致する場合に、特異ベクトルの移動体の位置が当該移動端末の位置であると判定する照合部とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自らの位置を検出する移動端末、カメラ及びプログラムに関する。特に、個人に所持される移動端末であって、その個人の位置を検出するものに関する。
【背景技術】
【0002】
従来、公共空間にあってユビキタス環境を実現するためには、その環境側システムに、移動端末の位置を管理する管理装置を備える必要がある。移動端末の位置情報は、逐次、管理装置によって収集される。管理装置は、位置情報に応じてその移動端末へ各種情報を送信することができる。移動体が分散した比較的広い環境については、例えばGPS(Global Positioning System)のようにグローバル座標系で、位置情報を表すことができる。また、移動体が密集した比較的狭い環境については、例えばPHS(Personal Handyphone System)のように3点測量の方法で、位置情報を表すこともできる。しかし、PHSを用いた場合、移動端末から基地局へ報知する電波の発信が頻繁になり、累積電力が大きくなるという問題もある。
【0003】
移動体が密集した比較的狭い環境について、例えば、人間が所持する移動体に搭載した加速度センサと、その移動体を含む環境全体を撮影するカメラとを用いて、移動体の位置を検出する技術がある(例えば特許文献1参照)。この技術によれば、PHSのように累積電力が大きくなることはない。環境側システムに管理装置が備えられており、その管理装置は、移動端末から、その移動端末の加速度センサによって検出される移動量を収集する。そして、管理装置は、移動端末から受信した移動量と、カメラによって撮影した人間の位置の画像情報とを照合する。これにより、その移動量に相当する移動体を画像情報から検出し、ある人間の移動を特定する。
【0004】
【特許文献1】特開2004−096501号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術によれば、環境側システムによって人間の移動が特定されることとなり、ユーザは知らないうちに公共空間によって監視されることとなる。これは、プライバシ確保の観点からも好ましくない。
【0006】
また、移動端末は、移動した先の位置に応じて、その環境側システムに対応して、自らのデータを送信し且つ位置情報を受信する必要がある。これは、公共空間における位置検出の汎用性を確保できない。また、特許文献1に記載の技術によれば、移動量によって照合するために、移動端末と環境側システムとの間で初期位置合わせが必要になる。
【0007】
従って、本発明は、環境側システムによって移動体の位置が特定されることなく、且つ、環境側システムに依存することなく、自らの位置を検出することができる移動端末、カメラ及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明によれば、自らの位置を検出する移動端末であって、
当該移動端末を所持する移動体を含む環境を撮影した画像情報から抽出され、移動体に任意に付与された移動体識別子と、移動体の位置座標とを含む2次元マップを受信する2次元マップ受信手段と、
移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する軌跡抽出手段と、
当該移動端末の加速度データを出力するセンサ手段と、
加速度データから、時間区間毎に当該移動端末の振る舞い情報を検出する振る舞い検出手段と、
同一の時間区間について振る舞い情報と特異ベクトルの変化とが一致する場合に、特異ベクトルの移動体の位置が当該移動端末の位置であると判定する照合手段と
を有することを特徴とする。
【0009】
本発明の移動端末における他の実施形態によれば、
前記2次元マップは、更に、静止体に任意に付与された静止体識別子と、静止体の位置座標とを含み、
静止体の位置座標に対して、照合手段によって判定された当該移動端末の位置座標の相対的位置を検出する位置検出手段を更に有することも好ましい。
【0010】
本発明の移動端末における他の実施形態によれば、振る舞い情報は、「移動」又は「停止」であることも好ましい。
【0011】
本発明の移動端末における他の実施形態によれば、
センサ手段は、更に地磁気データを出力するものであり、
振る舞い検出手段は、時間区間毎に当該移動端末の振る舞い情報として、加速度データから「移動」又は「停止」を検出し、地磁気データから「回転」又は「非回転」を検出することも好ましい。
【0012】
本発明によれば、前述の移動端末を所持する移動体を撮影する撮影手段を有するカメラであって、
撮影された画像情報から、移動体に任意に付与された移動体識別子と、移動体の位置座標とを含む2次元マップを作成する2次元マップ作成手段と、
2次元マップを、無線リンクを介して移動端末へ送信する2次元マップ送信手段と
を有することを特徴とする。
【0013】
自らの位置を検出する移動端末に搭載されたコンピュータを機能させるプログラムであって、
当該移動端末を所持する移動体を含む環境を撮影した画像情報から抽出され、移動体に任意に付与された移動体識別子と、移動体の位置座標とを含む2次元マップを受信する2次元マップ受信手段と、
移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する軌跡抽出手段と、
当該移動端末の加速度データを出力するセンサ手段と、
加速度データから、時間区間毎に当該移動端末の振る舞い情報を検出する振る舞い検出手段と、
同一の時間区間について振る舞い情報と特異ベクトルの変化とが一致する場合に、特異ベクトルの移動体の位置が当該移動端末の位置であると判定する照合手段と
してコンピュータを機能させることを特徴とする。
【0014】
本発明のプログラムにおける他の実施形態によれば、
前記2次元マップは、更に、静止体に任意に付与された静止体識別子と、静止体の位置座標とを含み、
静止体の位置座標に対して、照合手段によって判定された当該移動端末の位置座標の相対的位置を検出する位置検出手段としてコンピュータを更に機能させることも好ましい。
【0015】
本発明のプログラムにおける他の実施形態によれば、振る舞い情報は、「移動」又は「停止」であるようにコンピュータを機能させることも好ましい。
【0016】
本発明のプログラムにおける他の実施形態によれば、
センサ手段は、更に地磁気データを出力するものであり、
振る舞い検出手段は、時間区間毎に当該移動端末の振る舞い情報として、加速度データから「移動」又は「停止」を検出し、地磁気データから「回転」又は「非回転」を検出するようにコンピュータを機能させることも好ましい。
【0017】
本発明によれば、前述の移動端末を所持する移動体を撮影する撮影手段を有するカメラに搭載されたコンピュータを機能させるカメラ用プログラムであって、
撮影された画像情報から、移動体に任意に付与された移動体識別子と、移動体の位置座標とを含む2次元マップを作成する2次元マップ作成手段と、
2次元マップを、無線リンクを介して移動端末へ送信する2次元マップ送信手段と
してコンピュータを機能させることを特徴とする。
【発明の効果】
【0018】
本発明の移動端末、カメラ及びプログラムによれば、環境側システムによって移動体の位置が特定されることなく(プライバシの確保)、且つ、環境側システムに依存することなく(汎用性の確保)、移動端末が自らの位置を検出することができる。
【発明を実施するための最良の形態】
【0019】
以下では、図面を用いて、本発明を実施するための最良の形態について詳細に説明する。
【0020】
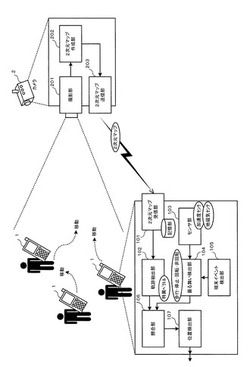
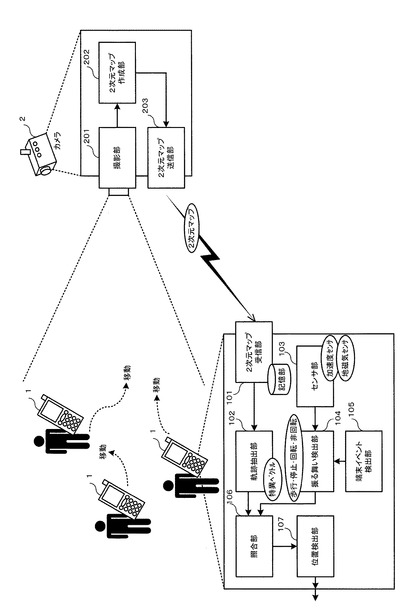
図1は、本発明における移動端末及びカメラの機能構成図である。
【0021】
図1のシステムによれば、移動端末1を所持するユーザ(移動体)と、それらユーザを含む環境全体を撮影するカメラ2とを有する。ユーザの移動は、移動端末1の移動と一致する。本発明における移動端末1は、カメラ2から無線リンクを介して2次元マップを受信し、自らの位置を特定する。
【0022】
カメラ2は、撮影部201と、2次元マップ作成部202と、2次元マップ送信部203とを有する。これら機能部は、カメラに搭載されたコンピュータを機能させるプログラムを実行することによっても実現できる。尚、カメラとは別に、当該カメラに接続され且つ2次元マップを作成する環境側管理装置を備えるものであってもよい。
【0023】
撮影部201は、移動端末1を所持するユーザを撮影する。
【0024】
2次元マップ作成部202は、移動端末1を所持するユーザを含む環境を撮影した画像情報から、2次元マップを作成する。2次元マップは、移動体に任意に付与された移動体ID(IDentifier:識別子)と、そのカメラから見た移動体の位置座標とを含む。以下の表1は、2次元マップの例である。
【表1】

【0025】
2次元マップ作成部202は、カメラ毎に、移動体が存在しない場合の画像(背景画像)と、移動体が存在する場合の画像(撮影画像)との差分を抽出する。その差分は、移動体毎に占める領域を表すこととなる。そして、移動体毎に、任意且つ固有の移動体IDが付与される。また、移動体毎に、その領域の中心(重心)における位置座標(xy座標)を抽出する。ここで、位置座標は、カメラから見た位置座標であってもよいし、複数のカメラで予め決められた座標系に基づく位置座標であってもよい。
【0026】
また、以下の表2のように、撮影時刻及び動体種別を含むことも好ましい。
【表2】
【0027】
撮影時刻は、後述する特異ベクトルを導出する際に用いられる。動体種別は、移動体(0)又は静止体(1)を表し、静止体に対して移動体の相対的位置を検出する際に用いられる。
【0028】
カメラは、例えばCCDカメラであって、デジタル画像データを出力する。その場合、画像データは、非常に短い時間区間(例えば30枚/秒)で出力されるので、移動体の急な移動であっても、短い移動間隔で検出できる。従って、同じ移動体IDの位置座標は、時系列データとして出力される。
【0029】
2次元マップ送信部203は、2次元マップを、無線リンクを介して移動端末1へ送信する。2次元マップが、リアルタイムに又は所定の時間区間で送信される場合、2次元マップに撮影時刻を含む必要はない。移動端末1によって時刻を知ることができるからである。
【0030】
図1によれば、移動端末1は、2次元マップ受信部101と、軌跡抽出部102と、センサ部103と、振る舞い検出部104と、端末イベント検出部105と、照合部106と、位置検出部107とを有する。これら機能部は、移動端末1に搭載されたコンピュータを機能させるプログラムを実行することによっても実現できる。
【0031】
2次元マップ受信部101は、カメラ2から無線リンクを介して2次元マップを受信し、記録する。ここで、移動体の位置座標が更新された2次元マップのみが、軌跡抽出部102へ通知される。
【0032】
軌跡抽出部102は、移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する。
【0033】
センサ部103は、移動端末1の加速度データを出力する加速度センサである。また、センサ部103は、移動端末1の地磁気データを出力する地磁気センサを更に含んでもよい。
【0034】
振る舞い検出部104は、加速度データから、時間区間毎に移動端末1の振る舞い情報を検出する。振る舞い情報として、加速度データからは「移動」又は「停止」が検出され、地磁気データからは「回転」又は「非回転」が検出される。
【0035】
端末イベント検出部105は、移動端末1に対するユーザの操作状態を検出し、その状態を、振る舞い検出部104へ通知する。ユーザの操作状態としては、例えば、折り畳み携帯電話機に対する開閉スイッチの状態や、ネットワーク利用状態などがある。
【0036】
照合部106は、同一の時間区間について振る舞い情報と特異ベクトルの変化とが一致する場合に、特異ベクトルの移動体の位置が当該移動端末の位置であると判定する。
【0037】
位置検出部107は、静止体の位置座標に対して、照合部106によって判定された当該移動端末の位置座標の相対的位置を検出する。静止体の位置座標は、2次元マップに含まれる情報であってもよいし、移動端末1が予め蓄積しているものであってもよい。従って、静止体の位置座標は、カメラ2から必ず受信するものではない。
【0038】
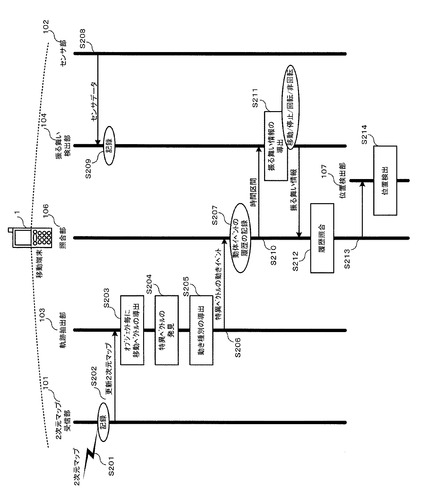
図2は、本発明における移動端末の各機能部のシーケンス図である。以下では、図1及び図2を参照して、各機能部の動作について説明する。
【0039】
(S201)2次元マップ受信部101は、無線リンクを介して、カメラ2又は管理装置から2次元マップを受信し、記録する。
【0040】
(S202)2次元マップ受信部101は、移動体の位置座標が更新された2次元マップのみを、軌跡抽出部102へ通知する。
【0041】
(S203)軌跡抽出部102は、2次元マップ受信部101から、更新された2次元マップを受け取る。軌跡抽出部102は、この2次元マップを時系列に座標上に展開することにより、移動体の移動を座標上にプロットする。
【0042】
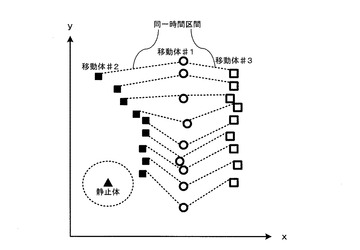
図3は、軌跡抽出部によって移動体の位置が展開された座標図である。
【0043】
図3によれば、xy座標上に、移動体#1〜3の移動の軌跡が表されている。ここで、点線で結ばれるプロットは、同じ時間区間であることを表している。移動体毎にプロットを結ぶことにより、その移動ベクトルを導出することができる。
【0044】
(S204)軌跡抽出部102は、複数の移動ベクトルから、同一時間区間における「特異ベクトル」を発見する。
【0045】
図4は、軌跡抽出部によって発見される特異ベクトルの座標図である。
【0046】
点線で囲まれた部分は、同一の時間区間である。複数の移動ベクトルは、同一の時間区間で比較される。図4によれば、移動体♯2のみが、他の移動体♯1及び♯3と比較して、移動ベクトルの向きが異なったことを検出することができる。このように、複数の移動体の中で、他の移動体と異なる動きをしている、高々1つの移動ベクトルのみを「特異ベクトル」として抽出する。
【0047】
(S205)軌跡抽出部102は、特異ベクトルについて、例えば、以下の4つの「動き種別」を導出する。
(1)直進:
先プロットの移動ベクトルと同一方向で、且つ、移動して現プロットがある。
(2)停止:
先プロットの移動ベクトルと同一方向で、且つ、同じ位置に現プロットがある。
(3)カーブ:
先プロットの移動ベクトルと異なる方向で、且つ、移動して現プロットがある。
(4)旋回:
先プロットの移動ベクトルと異なる方向で、且つ、同じ位置に現プロットがある
【0048】
(S206)軌跡抽出部102は、特異ベクトルの「動きイベント」を、照合部106へ通知する。「動きイベント」は、例えば表3のように、特異ベクトルが検出された「時間区間」、特異ベクトルの「移動体ID」、「位置座標」及び「動き種別」を含む。
【表3】
【0049】
(S207)照合部106は、軌跡抽出部102から「動きイベント」を受け取り、記録する。
【0050】
(S208)センサ部103は、当該移動端末1の加速度データ及び/又は地磁気データを検出し、それらを振る舞い検出部104へ通知する。
【0051】
(S209)振る舞い検出部104は、センサ部103から加速度データ及び/又は地磁気データを受け取り、時間区間毎に記録する。
【0052】
(S210)照合部106は、振る舞い検出部104へ、動体イベントの時間区間を通知する。
【0053】
(S211)振る舞い検出部104は、照合部106から時間区間を受け取り、その時間区間における加速度データ及び/又は地磁気データから当該移動端末1の振る舞いを検出する。加速度データからは、「移動」「停止」を判断することができる。地磁気データ(方位情報)からは、一定の時間区間の角速度を検出することができ、「回転」「非回転」を判断することができる。
【0054】
振る舞い検出部104は、時間区間毎に記録した加速度データを、照合部106から通知された時間区間について高速フーリエ変換(FFT:Fast Fourier Transform)をすることによって、パワースペクトラムを取得する。このパワースペクトラムを、事前に用意した「移動」「停止」のパターンと照合することによって、状態を推定することができる。
【0055】
振る舞い検出部104は、センサ部103から加速度データ及び地磁気データを受け取ることができる場合、以下の表4のような4つの振る舞いを検出することができる。
【表4】
【0056】
尚、振る舞い検出部104は、端末イベント検出部105から、移動端末に対するユーザの操作状態の通知を受けることもできる。
【0057】
振る舞い検出部104は、照合部106から通知された時間区間に対して検出した振る舞い情報を、照合部106へ返信する。
【0058】
(S212)照合部106は、軌跡抽出部102から通知された動体イベントの動き種別と、振る舞い検出部104から通知された振る舞い情報とが、一致するか否かを照合する。一致した場合、特異ベクトルの移動体の位置は、当該移動端末1の位置であると決定される。
【0059】
(S213)照合部106は、一致した特異ベクトルの移動体の移動体ID及び位置座標を、位置検出部107へ通知する。
【0060】
(S214)位置検出部107は、照合部106から当該移動端末1の移動体ID及び位置座標を受け取る。位置検出部107は、静止体の位置座標に対して、当該移動端末1の位置座標の相対的位置を検出する。例えば、移動端末1の位置座標が、静止体の位置座標に近いと判定することによって、移動端末1を所持するユーザは、その静止体に対して何らかの操作をすることもできる。例えば、移動端末1は、その静止体に対して情報を発信することもできる。
【0061】
以上、詳細に説明したように、本発明の移動端末、カメラ及びプログラムによれば、環境側システムによって移動体の位置が特定されることなく(プライバシの確保)、且つ、環境側システムに依存することなく(汎用性の確保)、移動端末が自らの位置を検出することができる。また、環境側システムは移動端末へ2次元マップを送信する機能しか備えないために、環境側システムにおける情報管理のコストを低減することができ、公共空間に有利なユビキタス環境を提供することができる。更に、静止体の位置座標に対して、移動体の位置座標の相対的位置を検出することができるので、一般の地図情報によって管理するよりも、そのコストを低減することができる。
【0062】
前述した本発明における種々の実施形態によれば、当業者は、本発明の技術思想及び見地の範囲における種々の変更、修正及び省略を容易に行うことができる。前述の説明はあくまで例であって、何ら制約しようとするものではない。本発明は、特許請求の範囲及びその均等物として限定するものにのみ制約される。
【図面の簡単な説明】
【0063】
【図1】本発明における移動端末及びカメラの機能構成図である。
【図2】本発明における移動端末の各機能部のシーケンス図である。
【図3】軌跡抽出部によって移動体の位置が展開された座標図である。
【図4】軌跡抽出部によって発見される特異ベクトルの座標図である。
【符号の説明】
【0064】
1 移動端末
101 2次元マップ受信部
102 軌跡抽出部
103 センサ部
104 振る舞い検出部
105 端末イベント検出部
106 照合部
107 位置検出部
2 カメラ
201 撮影部
202 2次元マップ作成部
203 2次元マップ送信部
3 ユーザ、移動体
【技術分野】
【0001】
本発明は、自らの位置を検出する移動端末、カメラ及びプログラムに関する。特に、個人に所持される移動端末であって、その個人の位置を検出するものに関する。
【背景技術】
【0002】
従来、公共空間にあってユビキタス環境を実現するためには、その環境側システムに、移動端末の位置を管理する管理装置を備える必要がある。移動端末の位置情報は、逐次、管理装置によって収集される。管理装置は、位置情報に応じてその移動端末へ各種情報を送信することができる。移動体が分散した比較的広い環境については、例えばGPS(Global Positioning System)のようにグローバル座標系で、位置情報を表すことができる。また、移動体が密集した比較的狭い環境については、例えばPHS(Personal Handyphone System)のように3点測量の方法で、位置情報を表すこともできる。しかし、PHSを用いた場合、移動端末から基地局へ報知する電波の発信が頻繁になり、累積電力が大きくなるという問題もある。
【0003】
移動体が密集した比較的狭い環境について、例えば、人間が所持する移動体に搭載した加速度センサと、その移動体を含む環境全体を撮影するカメラとを用いて、移動体の位置を検出する技術がある(例えば特許文献1参照)。この技術によれば、PHSのように累積電力が大きくなることはない。環境側システムに管理装置が備えられており、その管理装置は、移動端末から、その移動端末の加速度センサによって検出される移動量を収集する。そして、管理装置は、移動端末から受信した移動量と、カメラによって撮影した人間の位置の画像情報とを照合する。これにより、その移動量に相当する移動体を画像情報から検出し、ある人間の移動を特定する。
【0004】
【特許文献1】特開2004−096501号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術によれば、環境側システムによって人間の移動が特定されることとなり、ユーザは知らないうちに公共空間によって監視されることとなる。これは、プライバシ確保の観点からも好ましくない。
【0006】
また、移動端末は、移動した先の位置に応じて、その環境側システムに対応して、自らのデータを送信し且つ位置情報を受信する必要がある。これは、公共空間における位置検出の汎用性を確保できない。また、特許文献1に記載の技術によれば、移動量によって照合するために、移動端末と環境側システムとの間で初期位置合わせが必要になる。
【0007】
従って、本発明は、環境側システムによって移動体の位置が特定されることなく、且つ、環境側システムに依存することなく、自らの位置を検出することができる移動端末、カメラ及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明によれば、自らの位置を検出する移動端末であって、
当該移動端末を所持する移動体を含む環境を撮影した画像情報から抽出され、移動体に任意に付与された移動体識別子と、移動体の位置座標とを含む2次元マップを受信する2次元マップ受信手段と、
移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する軌跡抽出手段と、
当該移動端末の加速度データを出力するセンサ手段と、
加速度データから、時間区間毎に当該移動端末の振る舞い情報を検出する振る舞い検出手段と、
同一の時間区間について振る舞い情報と特異ベクトルの変化とが一致する場合に、特異ベクトルの移動体の位置が当該移動端末の位置であると判定する照合手段と
を有することを特徴とする。
【0009】
本発明の移動端末における他の実施形態によれば、
前記2次元マップは、更に、静止体に任意に付与された静止体識別子と、静止体の位置座標とを含み、
静止体の位置座標に対して、照合手段によって判定された当該移動端末の位置座標の相対的位置を検出する位置検出手段を更に有することも好ましい。
【0010】
本発明の移動端末における他の実施形態によれば、振る舞い情報は、「移動」又は「停止」であることも好ましい。
【0011】
本発明の移動端末における他の実施形態によれば、
センサ手段は、更に地磁気データを出力するものであり、
振る舞い検出手段は、時間区間毎に当該移動端末の振る舞い情報として、加速度データから「移動」又は「停止」を検出し、地磁気データから「回転」又は「非回転」を検出することも好ましい。
【0012】
本発明によれば、前述の移動端末を所持する移動体を撮影する撮影手段を有するカメラであって、
撮影された画像情報から、移動体に任意に付与された移動体識別子と、移動体の位置座標とを含む2次元マップを作成する2次元マップ作成手段と、
2次元マップを、無線リンクを介して移動端末へ送信する2次元マップ送信手段と
を有することを特徴とする。
【0013】
自らの位置を検出する移動端末に搭載されたコンピュータを機能させるプログラムであって、
当該移動端末を所持する移動体を含む環境を撮影した画像情報から抽出され、移動体に任意に付与された移動体識別子と、移動体の位置座標とを含む2次元マップを受信する2次元マップ受信手段と、
移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する軌跡抽出手段と、
当該移動端末の加速度データを出力するセンサ手段と、
加速度データから、時間区間毎に当該移動端末の振る舞い情報を検出する振る舞い検出手段と、
同一の時間区間について振る舞い情報と特異ベクトルの変化とが一致する場合に、特異ベクトルの移動体の位置が当該移動端末の位置であると判定する照合手段と
してコンピュータを機能させることを特徴とする。
【0014】
本発明のプログラムにおける他の実施形態によれば、
前記2次元マップは、更に、静止体に任意に付与された静止体識別子と、静止体の位置座標とを含み、
静止体の位置座標に対して、照合手段によって判定された当該移動端末の位置座標の相対的位置を検出する位置検出手段としてコンピュータを更に機能させることも好ましい。
【0015】
本発明のプログラムにおける他の実施形態によれば、振る舞い情報は、「移動」又は「停止」であるようにコンピュータを機能させることも好ましい。
【0016】
本発明のプログラムにおける他の実施形態によれば、
センサ手段は、更に地磁気データを出力するものであり、
振る舞い検出手段は、時間区間毎に当該移動端末の振る舞い情報として、加速度データから「移動」又は「停止」を検出し、地磁気データから「回転」又は「非回転」を検出するようにコンピュータを機能させることも好ましい。
【0017】
本発明によれば、前述の移動端末を所持する移動体を撮影する撮影手段を有するカメラに搭載されたコンピュータを機能させるカメラ用プログラムであって、
撮影された画像情報から、移動体に任意に付与された移動体識別子と、移動体の位置座標とを含む2次元マップを作成する2次元マップ作成手段と、
2次元マップを、無線リンクを介して移動端末へ送信する2次元マップ送信手段と
してコンピュータを機能させることを特徴とする。
【発明の効果】
【0018】
本発明の移動端末、カメラ及びプログラムによれば、環境側システムによって移動体の位置が特定されることなく(プライバシの確保)、且つ、環境側システムに依存することなく(汎用性の確保)、移動端末が自らの位置を検出することができる。
【発明を実施するための最良の形態】
【0019】
以下では、図面を用いて、本発明を実施するための最良の形態について詳細に説明する。
【0020】
図1は、本発明における移動端末及びカメラの機能構成図である。
【0021】
図1のシステムによれば、移動端末1を所持するユーザ(移動体)と、それらユーザを含む環境全体を撮影するカメラ2とを有する。ユーザの移動は、移動端末1の移動と一致する。本発明における移動端末1は、カメラ2から無線リンクを介して2次元マップを受信し、自らの位置を特定する。
【0022】
カメラ2は、撮影部201と、2次元マップ作成部202と、2次元マップ送信部203とを有する。これら機能部は、カメラに搭載されたコンピュータを機能させるプログラムを実行することによっても実現できる。尚、カメラとは別に、当該カメラに接続され且つ2次元マップを作成する環境側管理装置を備えるものであってもよい。
【0023】
撮影部201は、移動端末1を所持するユーザを撮影する。
【0024】
2次元マップ作成部202は、移動端末1を所持するユーザを含む環境を撮影した画像情報から、2次元マップを作成する。2次元マップは、移動体に任意に付与された移動体ID(IDentifier:識別子)と、そのカメラから見た移動体の位置座標とを含む。以下の表1は、2次元マップの例である。
【表1】
【0025】
2次元マップ作成部202は、カメラ毎に、移動体が存在しない場合の画像(背景画像)と、移動体が存在する場合の画像(撮影画像)との差分を抽出する。その差分は、移動体毎に占める領域を表すこととなる。そして、移動体毎に、任意且つ固有の移動体IDが付与される。また、移動体毎に、その領域の中心(重心)における位置座標(xy座標)を抽出する。ここで、位置座標は、カメラから見た位置座標であってもよいし、複数のカメラで予め決められた座標系に基づく位置座標であってもよい。
【0026】
また、以下の表2のように、撮影時刻及び動体種別を含むことも好ましい。
【表2】
【0027】
撮影時刻は、後述する特異ベクトルを導出する際に用いられる。動体種別は、移動体(0)又は静止体(1)を表し、静止体に対して移動体の相対的位置を検出する際に用いられる。
【0028】
カメラは、例えばCCDカメラであって、デジタル画像データを出力する。その場合、画像データは、非常に短い時間区間(例えば30枚/秒)で出力されるので、移動体の急な移動であっても、短い移動間隔で検出できる。従って、同じ移動体IDの位置座標は、時系列データとして出力される。
【0029】
2次元マップ送信部203は、2次元マップを、無線リンクを介して移動端末1へ送信する。2次元マップが、リアルタイムに又は所定の時間区間で送信される場合、2次元マップに撮影時刻を含む必要はない。移動端末1によって時刻を知ることができるからである。
【0030】
図1によれば、移動端末1は、2次元マップ受信部101と、軌跡抽出部102と、センサ部103と、振る舞い検出部104と、端末イベント検出部105と、照合部106と、位置検出部107とを有する。これら機能部は、移動端末1に搭載されたコンピュータを機能させるプログラムを実行することによっても実現できる。
【0031】
2次元マップ受信部101は、カメラ2から無線リンクを介して2次元マップを受信し、記録する。ここで、移動体の位置座標が更新された2次元マップのみが、軌跡抽出部102へ通知される。
【0032】
軌跡抽出部102は、移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する。
【0033】
センサ部103は、移動端末1の加速度データを出力する加速度センサである。また、センサ部103は、移動端末1の地磁気データを出力する地磁気センサを更に含んでもよい。
【0034】
振る舞い検出部104は、加速度データから、時間区間毎に移動端末1の振る舞い情報を検出する。振る舞い情報として、加速度データからは「移動」又は「停止」が検出され、地磁気データからは「回転」又は「非回転」が検出される。
【0035】
端末イベント検出部105は、移動端末1に対するユーザの操作状態を検出し、その状態を、振る舞い検出部104へ通知する。ユーザの操作状態としては、例えば、折り畳み携帯電話機に対する開閉スイッチの状態や、ネットワーク利用状態などがある。
【0036】
照合部106は、同一の時間区間について振る舞い情報と特異ベクトルの変化とが一致する場合に、特異ベクトルの移動体の位置が当該移動端末の位置であると判定する。
【0037】
位置検出部107は、静止体の位置座標に対して、照合部106によって判定された当該移動端末の位置座標の相対的位置を検出する。静止体の位置座標は、2次元マップに含まれる情報であってもよいし、移動端末1が予め蓄積しているものであってもよい。従って、静止体の位置座標は、カメラ2から必ず受信するものではない。
【0038】
図2は、本発明における移動端末の各機能部のシーケンス図である。以下では、図1及び図2を参照して、各機能部の動作について説明する。
【0039】
(S201)2次元マップ受信部101は、無線リンクを介して、カメラ2又は管理装置から2次元マップを受信し、記録する。
【0040】
(S202)2次元マップ受信部101は、移動体の位置座標が更新された2次元マップのみを、軌跡抽出部102へ通知する。
【0041】
(S203)軌跡抽出部102は、2次元マップ受信部101から、更新された2次元マップを受け取る。軌跡抽出部102は、この2次元マップを時系列に座標上に展開することにより、移動体の移動を座標上にプロットする。
【0042】
図3は、軌跡抽出部によって移動体の位置が展開された座標図である。
【0043】
図3によれば、xy座標上に、移動体#1〜3の移動の軌跡が表されている。ここで、点線で結ばれるプロットは、同じ時間区間であることを表している。移動体毎にプロットを結ぶことにより、その移動ベクトルを導出することができる。
【0044】
(S204)軌跡抽出部102は、複数の移動ベクトルから、同一時間区間における「特異ベクトル」を発見する。
【0045】
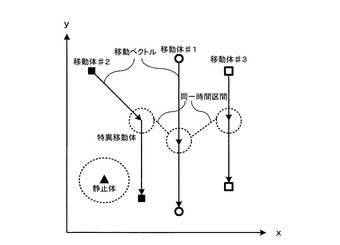
図4は、軌跡抽出部によって発見される特異ベクトルの座標図である。
【0046】
点線で囲まれた部分は、同一の時間区間である。複数の移動ベクトルは、同一の時間区間で比較される。図4によれば、移動体♯2のみが、他の移動体♯1及び♯3と比較して、移動ベクトルの向きが異なったことを検出することができる。このように、複数の移動体の中で、他の移動体と異なる動きをしている、高々1つの移動ベクトルのみを「特異ベクトル」として抽出する。
【0047】
(S205)軌跡抽出部102は、特異ベクトルについて、例えば、以下の4つの「動き種別」を導出する。
(1)直進:
先プロットの移動ベクトルと同一方向で、且つ、移動して現プロットがある。
(2)停止:
先プロットの移動ベクトルと同一方向で、且つ、同じ位置に現プロットがある。
(3)カーブ:
先プロットの移動ベクトルと異なる方向で、且つ、移動して現プロットがある。
(4)旋回:
先プロットの移動ベクトルと異なる方向で、且つ、同じ位置に現プロットがある
【0048】
(S206)軌跡抽出部102は、特異ベクトルの「動きイベント」を、照合部106へ通知する。「動きイベント」は、例えば表3のように、特異ベクトルが検出された「時間区間」、特異ベクトルの「移動体ID」、「位置座標」及び「動き種別」を含む。
【表3】
【0049】
(S207)照合部106は、軌跡抽出部102から「動きイベント」を受け取り、記録する。
【0050】
(S208)センサ部103は、当該移動端末1の加速度データ及び/又は地磁気データを検出し、それらを振る舞い検出部104へ通知する。
【0051】
(S209)振る舞い検出部104は、センサ部103から加速度データ及び/又は地磁気データを受け取り、時間区間毎に記録する。
【0052】
(S210)照合部106は、振る舞い検出部104へ、動体イベントの時間区間を通知する。
【0053】
(S211)振る舞い検出部104は、照合部106から時間区間を受け取り、その時間区間における加速度データ及び/又は地磁気データから当該移動端末1の振る舞いを検出する。加速度データからは、「移動」「停止」を判断することができる。地磁気データ(方位情報)からは、一定の時間区間の角速度を検出することができ、「回転」「非回転」を判断することができる。
【0054】
振る舞い検出部104は、時間区間毎に記録した加速度データを、照合部106から通知された時間区間について高速フーリエ変換(FFT:Fast Fourier Transform)をすることによって、パワースペクトラムを取得する。このパワースペクトラムを、事前に用意した「移動」「停止」のパターンと照合することによって、状態を推定することができる。
【0055】
振る舞い検出部104は、センサ部103から加速度データ及び地磁気データを受け取ることができる場合、以下の表4のような4つの振る舞いを検出することができる。
【表4】
【0056】
尚、振る舞い検出部104は、端末イベント検出部105から、移動端末に対するユーザの操作状態の通知を受けることもできる。
【0057】
振る舞い検出部104は、照合部106から通知された時間区間に対して検出した振る舞い情報を、照合部106へ返信する。
【0058】
(S212)照合部106は、軌跡抽出部102から通知された動体イベントの動き種別と、振る舞い検出部104から通知された振る舞い情報とが、一致するか否かを照合する。一致した場合、特異ベクトルの移動体の位置は、当該移動端末1の位置であると決定される。
【0059】
(S213)照合部106は、一致した特異ベクトルの移動体の移動体ID及び位置座標を、位置検出部107へ通知する。
【0060】
(S214)位置検出部107は、照合部106から当該移動端末1の移動体ID及び位置座標を受け取る。位置検出部107は、静止体の位置座標に対して、当該移動端末1の位置座標の相対的位置を検出する。例えば、移動端末1の位置座標が、静止体の位置座標に近いと判定することによって、移動端末1を所持するユーザは、その静止体に対して何らかの操作をすることもできる。例えば、移動端末1は、その静止体に対して情報を発信することもできる。
【0061】
以上、詳細に説明したように、本発明の移動端末、カメラ及びプログラムによれば、環境側システムによって移動体の位置が特定されることなく(プライバシの確保)、且つ、環境側システムに依存することなく(汎用性の確保)、移動端末が自らの位置を検出することができる。また、環境側システムは移動端末へ2次元マップを送信する機能しか備えないために、環境側システムにおける情報管理のコストを低減することができ、公共空間に有利なユビキタス環境を提供することができる。更に、静止体の位置座標に対して、移動体の位置座標の相対的位置を検出することができるので、一般の地図情報によって管理するよりも、そのコストを低減することができる。
【0062】
前述した本発明における種々の実施形態によれば、当業者は、本発明の技術思想及び見地の範囲における種々の変更、修正及び省略を容易に行うことができる。前述の説明はあくまで例であって、何ら制約しようとするものではない。本発明は、特許請求の範囲及びその均等物として限定するものにのみ制約される。
【図面の簡単な説明】
【0063】
【図1】本発明における移動端末及びカメラの機能構成図である。
【図2】本発明における移動端末の各機能部のシーケンス図である。
【図3】軌跡抽出部によって移動体の位置が展開された座標図である。
【図4】軌跡抽出部によって発見される特異ベクトルの座標図である。
【符号の説明】
【0064】
1 移動端末
101 2次元マップ受信部
102 軌跡抽出部
103 センサ部
104 振る舞い検出部
105 端末イベント検出部
106 照合部
107 位置検出部
2 カメラ
201 撮影部
202 2次元マップ作成部
203 2次元マップ送信部
3 ユーザ、移動体
【特許請求の範囲】
【請求項1】
自らの位置を検出する移動端末であって、
当該移動端末を所持する移動体を含む環境を撮影した画像情報から抽出され、前記移動体に任意に付与された移動体識別子と、前記移動体の位置座標とを含む2次元マップを受信する2次元マップ受信手段と、
前記移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する軌跡抽出手段と、
当該移動端末の加速度データを出力するセンサ手段と、
前記加速度データから、時間区間毎に当該移動端末の振る舞い情報を検出する振る舞い検出手段と、
同一の時間区間について前記振る舞い情報と前記特異ベクトルの変化とが一致する場合に、前記特異ベクトルの移動体の位置が当該移動端末の位置であると判定する照合手段と
を有することを特徴とする移動端末。
【請求項2】
前記2次元マップは、更に、静止体に任意に付与された静止体識別子と、静止体の位置座標とを含み、
前記静止体の位置座標に対して、前記照合手段によって判定された当該移動端末の位置座標の相対的位置を検出する位置検出手段を更に有することを特徴とする請求項1に記載の移動端末。
【請求項3】
前記振る舞い情報は、「移動」又は「停止」であることを特徴とする請求項1又は2に記載の移動端末。
【請求項4】
前記センサ手段は、更に地磁気データを出力するものであり、
前記振る舞い検出手段は、時間区間毎に当該移動端末の振る舞い情報として、前記加速度データから「移動」又は「停止」を検出し、前記地磁気データから「回転」又は「非回転」を検出することを特徴とする請求項1又は2に記載の移動端末。
【請求項5】
請求項1から4のいずれか1項に記載の移動端末を所持する移動体を撮影する撮影手段を有するカメラであって、
撮影された画像情報から、前記移動体に任意に付与された移動体識別子と、前記移動体の位置座標とを含む2次元マップを作成する2次元マップ作成手段と、
前記2次元マップを、無線リンクを介して前記移動端末へ送信する2次元マップ送信手段と
を有することを特徴とするカメラ。
【請求項6】
自らの位置を検出する移動端末に搭載されたコンピュータを機能させるプログラムであって、
当該移動端末を所持する移動体を含む環境を撮影した画像情報から抽出され、前記移動体に任意に付与された移動体識別子と、前記移動体の位置座標とを含む2次元マップを受信する2次元マップ受信手段と、
前記移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する軌跡抽出手段と、
当該移動端末の加速度データを出力するセンサ手段と、
前記加速度データから、時間区間毎に当該移動端末の振る舞い情報を検出する振る舞い検出手段と、
同一の時間区間について前記振る舞い情報と前記特異ベクトルの変化とが一致する場合に、前記特異ベクトルの移動体の位置が当該移動端末の位置であると判定する照合手段と
してコンピュータを機能させることを特徴とするプログラム。
【請求項7】
前記2次元マップは、更に、静止体に任意に付与された静止体識別子と、静止体の位置座標とを含み、
前記静止体の位置座標に対して、前記照合手段によって判定された当該移動端末の位置座標の相対的位置を検出する位置検出手段としてコンピュータを更に機能させることを特徴とする請求項6に記載のプログラム。
【請求項8】
前記振る舞い情報は、「移動」又は「停止」であるようにコンピュータを機能させることを特徴とする請求項6又は7に記載のプログラム。
【請求項9】
前記センサ手段は、更に地磁気データを出力するものであり、
前記振る舞い検出手段は、時間区間毎に当該移動端末の振る舞い情報として、前記加速度データから「移動」又は「停止」を検出し、前記地磁気データから「回転」又は「非回転」を検出するようにコンピュータを機能させることを特徴とする請求項6又は7に記載のプログラム。
【請求項10】
請求項1から4のいずれか1項に記載の移動端末を所持する移動体を撮影する撮影手段を有するカメラに搭載されたコンピュータを機能させるカメラ用プログラムであって、
撮影された画像情報から、前記移動体に任意に付与された移動体識別子と、前記移動体の位置座標とを含む2次元マップを作成する2次元マップ作成手段と、
前記2次元マップを、無線リンクを介して前記移動端末へ送信する2次元マップ送信手段と
してコンピュータを機能させることを特徴とするカメラ用プログラム。
【請求項1】
自らの位置を検出する移動端末であって、
当該移動端末を所持する移動体を含む環境を撮影した画像情報から抽出され、前記移動体に任意に付与された移動体識別子と、前記移動体の位置座標とを含む2次元マップを受信する2次元マップ受信手段と、
前記移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する軌跡抽出手段と、
当該移動端末の加速度データを出力するセンサ手段と、
前記加速度データから、時間区間毎に当該移動端末の振る舞い情報を検出する振る舞い検出手段と、
同一の時間区間について前記振る舞い情報と前記特異ベクトルの変化とが一致する場合に、前記特異ベクトルの移動体の位置が当該移動端末の位置であると判定する照合手段と
を有することを特徴とする移動端末。
【請求項2】
前記2次元マップは、更に、静止体に任意に付与された静止体識別子と、静止体の位置座標とを含み、
前記静止体の位置座標に対して、前記照合手段によって判定された当該移動端末の位置座標の相対的位置を検出する位置検出手段を更に有することを特徴とする請求項1に記載の移動端末。
【請求項3】
前記振る舞い情報は、「移動」又は「停止」であることを特徴とする請求項1又は2に記載の移動端末。
【請求項4】
前記センサ手段は、更に地磁気データを出力するものであり、
前記振る舞い検出手段は、時間区間毎に当該移動端末の振る舞い情報として、前記加速度データから「移動」又は「停止」を検出し、前記地磁気データから「回転」又は「非回転」を検出することを特徴とする請求項1又は2に記載の移動端末。
【請求項5】
請求項1から4のいずれか1項に記載の移動端末を所持する移動体を撮影する撮影手段を有するカメラであって、
撮影された画像情報から、前記移動体に任意に付与された移動体識別子と、前記移動体の位置座標とを含む2次元マップを作成する2次元マップ作成手段と、
前記2次元マップを、無線リンクを介して前記移動端末へ送信する2次元マップ送信手段と
を有することを特徴とするカメラ。
【請求項6】
自らの位置を検出する移動端末に搭載されたコンピュータを機能させるプログラムであって、
当該移動端末を所持する移動体を含む環境を撮影した画像情報から抽出され、前記移動体に任意に付与された移動体識別子と、前記移動体の位置座標とを含む2次元マップを受信する2次元マップ受信手段と、
前記移動体毎の位置座標の時系列変化から移動ベクトルを導出し、時間区間毎に他の移動ベクトルと異なる動きとなった特異ベクトルを導出する軌跡抽出手段と、
当該移動端末の加速度データを出力するセンサ手段と、
前記加速度データから、時間区間毎に当該移動端末の振る舞い情報を検出する振る舞い検出手段と、
同一の時間区間について前記振る舞い情報と前記特異ベクトルの変化とが一致する場合に、前記特異ベクトルの移動体の位置が当該移動端末の位置であると判定する照合手段と
してコンピュータを機能させることを特徴とするプログラム。
【請求項7】
前記2次元マップは、更に、静止体に任意に付与された静止体識別子と、静止体の位置座標とを含み、
前記静止体の位置座標に対して、前記照合手段によって判定された当該移動端末の位置座標の相対的位置を検出する位置検出手段としてコンピュータを更に機能させることを特徴とする請求項6に記載のプログラム。
【請求項8】
前記振る舞い情報は、「移動」又は「停止」であるようにコンピュータを機能させることを特徴とする請求項6又は7に記載のプログラム。
【請求項9】
前記センサ手段は、更に地磁気データを出力するものであり、
前記振る舞い検出手段は、時間区間毎に当該移動端末の振る舞い情報として、前記加速度データから「移動」又は「停止」を検出し、前記地磁気データから「回転」又は「非回転」を検出するようにコンピュータを機能させることを特徴とする請求項6又は7に記載のプログラム。
【請求項10】
請求項1から4のいずれか1項に記載の移動端末を所持する移動体を撮影する撮影手段を有するカメラに搭載されたコンピュータを機能させるカメラ用プログラムであって、
撮影された画像情報から、前記移動体に任意に付与された移動体識別子と、前記移動体の位置座標とを含む2次元マップを作成する2次元マップ作成手段と、
前記2次元マップを、無線リンクを介して前記移動端末へ送信する2次元マップ送信手段と
してコンピュータを機能させることを特徴とするカメラ用プログラム。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−26272(P2008−26272A)
【公開日】平成20年2月7日(2008.2.7)
【国際特許分類】
【出願番号】特願2006−202391(P2006−202391)
【出願日】平成18年7月25日(2006.7.25)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
【公開日】平成20年2月7日(2008.2.7)
【国際特許分類】
【出願日】平成18年7月25日(2006.7.25)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
[ Back to top ]