
自動ゼロ点ゾーンを使用する接触力検出用カテーテルのインビボ較正
【課題】力検出用カテーテル又は他のプローブの較正のためのシステム及び方法を提供する。
【解決手段】カテーテル又は他のプローブの遠位先端部が、患者の体腔内に配置され、組織接触がないことの検証が、心電図(ECG)又はインピーダンスデータ、蛍光透視撮像又は他のリアルタイム撮像データ及び/又は電子解剖学的マッピングシステムを用いてなされる。組織接触がないことが一旦検証されると、力センサから発せられる信号をゼログラムの力読取りに相当するように設定することで、システムがその信号を再較正し、この再較正されたベースライン読取りが用いられて、力センサデータに基づく力読取りを発生し、かつ表示する。位置センサによってこれら自動ゼロ点ゾーン位置に対してもたらされた情報に基づく位置データが、システムのメモリ内に格納される。
【解決手段】カテーテル又は他のプローブの遠位先端部が、患者の体腔内に配置され、組織接触がないことの検証が、心電図(ECG)又はインピーダンスデータ、蛍光透視撮像又は他のリアルタイム撮像データ及び/又は電子解剖学的マッピングシステムを用いてなされる。組織接触がないことが一旦検証されると、力センサから発せられる信号をゼログラムの力読取りに相当するように設定することで、システムがその信号を再較正し、この再較正されたベースライン読取りが用いられて、力センサデータに基づく力読取りを発生し、かつ表示する。位置センサによってこれら自動ゼロ点ゾーン位置に対してもたらされた情報に基づく位置データが、システムのメモリ内に格納される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カテーテルのような医療用プローブを使用する方法に関し、特にヒトの身体の治療、特に心不整脈の治療のための力検出用カテーテルに関する。より具体的には、本発明は、心臓処置中の使用における力検出用プローブ又はカテーテルの動的、インビボ較正に関する。
【背景技術】
【0002】
広範囲にわたる医療処置が、カテーテルのようなプローブを患者の身体内に配置させることを伴う。このようなプローブを追跡するために、位置検知システムが開発されている。磁気的位置検知は、当該技術分野において既知の方法の1つである。磁気的位置検知においては、一般的に、磁場発生器が患者の体外の既知の位置に配置される。プローブの遠位端内の磁界センサがこれらの磁界に応じて電気信号を生成し、この信号が処理されてプローブの遠位端の位置座標が決定される。これらの方法及びシステムは、米国特許第5,391,199号、同第6,690,963号、同第6,484,118号、同第6,239,724号、同第6,618,612号及び同第6,332,089号、PCT国際特許公開第WO 1996/005768号、並びに米国特許出願公開第2002/006455号、同第2003/0120150号及び同第2004/0068178号に記述されており、これら開示は参照により全体が本明細書に組み込まれる。
【0003】
これらタイプのプローブ又はカテーテルが極めて有用であると証明されている医療処置の1つは、心不整脈の治療におけるものである。心不整脈及び特に心房細動は、特に高齢者集団では、一般的かつ危険な病状として存続する。正常の洞律動を有する患者では、心房、心室及び興奮伝導組織を含む心臓は、電気的に興奮して、同期的な、パターン化した形で拍動する。心不整脈の患者では、心臓組織の異常な領域は、正常の洞律動を有する患者のように通常の導電組織に結びついた同期的な拍動周期に従わない。これに対して、心組織の異常領域では隣接組織への伝導が異常であり、これにより心臓周期が乱れて非同期的な心律動となる。こうした異常伝導は、例えば、房室(AV)結節及びヒス束の伝導経路に沿った洞房(SA)結節の領域、又は心室及び心房室の壁を形成する心筋組織など、心臓の様々な領域で生じることがこれまでに知られている。
【0004】
心房性不整脈を含む心不整脈は、心房室の回りで散乱し、かつしばしば自己増殖する電気インパルスの複数の非同期的ループを特徴とする、マルチウェーブレットリエントラント型となる可能性がある。マルチウェーブレットリエントラント型に代わって又はそれに加えて、心不整脈はまた、心房の組織の孤立領域が、急速で反復的な様式で自律的に興奮する場合など、局所的な起源を有することもある。心室性頻脈症(Vーtach又はVT)は、心室のうちの1つにおいて起こる頻脈症又は高速な心律動である。これは、心室細動及び突然死につながり得るため、場合によっては重篤な不整脈となる。
【0005】
不整脈の1つのタイプ、心房細動は、洞房結節によって生成される通常の電気インパルスが、心房及び肺静脈内で生じる無秩序な電気インパルスによって圧倒され、不規則なインパルスが心室に伝導する場合に発生する。不規則な心拍が結果的にもたらされ、これは、数分から数週間、又は更に数年間、持続する場合がある。心房細動(AF)は、しばしば脳卒中が原因となる死亡のリスクの、僅かな増大につながる、慢性的な症状である場合が多い。リスクは年齢と共に増大する。80歳を超える人口の約8%が、ある程度のAFを有している。心房細動は、無症候性である場合が多く、それ自体は概ね致死性ではないが、動悸(palpatations)、脱力感、失神、胸痛、及び鬱血性心不全をもたらす恐れがある。脳卒中のリスクは、AFの間に増大するが、これは、収縮が不十分な心房及び左心耳内に、血液が溜まって血栓を形成するためである。AFに関する第一選択の治療法は、心拍数を減らすか、又は心律動を通常に戻す、投薬治療である。更には、AFを有する患者は、脳卒中のリスクから守るために、抗凝血剤を与えられる場合が多い。そのような抗凝血剤の使用は、それ自体のリスクである内出血を伴う。一部の患者では、投薬治療は十分ではなく、その患者のAFは、薬剤不応、すなわち、標準的な薬理学的介入では治療不可能であると判断される。同期電気的除細動もまた、AFを通常の心律動に変換するために使用することができる。あるいは、AFの患者は、カテーテルアブレーションによって治療される。しかしながら、そのようなアブレーションは、全ての患者で成功するわけではない。それゆえ、そのような患者に関する、代替的な治療法を有する必要性が存在する。外科的アブレーションは、1つの選択肢であるが、また、外科手術に従来より関連する、付加的なリスクも有する。
【0006】
心不整脈の診断及び治療には、心臓組織、特に心内膜及び心臓容積の電気的特性をマッピングすること、並びにエネルギーの適用によって心臓組織を選択的にアブレーションすることが含まれる。そのようなアブレーションにより、望ましくない電気信号が心臓のある部分から別の部分へと伝播するのを止めるかあるいは修正することができる。焼灼方法は、非導電病変の形成により、望ましくない電気経路を破壊する。損傷部位を形成するための様々なエネルギー供給の様式がこれまでに開示されており、心組織壁に沿って伝導遮断部分を形成するためのマイクロ波、レーザー、及びより一般的には高周波エネルギーの使用が挙げられる。マッピングに続いてアブレーションを行う2段階の手術においては、通常、1以上の電気センサ(又は電極)を収容したカテーテルを心臓の内部に前進させ、多数の点におけるデータを取得することによって心臓内の各点における電気活動が感知及び測定される。次いで、これらのデータを利用して、このアブレーションを行うべき心臓内の標的領域を選択する。
【0007】
電極カテーテルは、長年にわたり医療行為で一般的に用いられている。電極カテーテルは心臓内の電気的活動を刺激及びマッピングし、異常な電気的活動が見られる部位を除去するために用いられる。使用時には、電極カテーテルは大腿動脈などの主要な静脈又は動脈、例えば大動脈、に挿入された後、対象とされる心室内に導かれる。典型的なアブレーション処置は、その遠位端に先端電極を有するカテーテルを、心腔内に挿入することを伴う。参照電極が、一般的には患者の皮膚にテープで貼り付けられるか、あるいは心臓内又は心臓付近に配置されている第2のカテーテルによって、提供される。RF(高周波)電流をアブレーションカテーテルの先端電極に通電すると、先端電極の周囲の媒質(すなわち、血液及び組織)に参照電極に向かって電流が流れる。電流の分布は、組織よりも導電性が高い血液に対して組織と接触した電極表面の量によって決まる。組織の電気抵抗によって組織が加熱される。組織が充分に加熱されると心組織の細胞が破壊され、心組織内に非導電性の損傷部位が形成される。
【0008】
したがって、アブレーションカテーテル又は他のカテーテルを体内、特に心内膜組織近くに配置させる場合、カテーテルの遠位先端部をその組織と直接接触させることが望ましい。この接触は、例えば、遠位先端部と体組織との間の接触を測定することによって、確かめることができる。その開示内容が参照として本明細書に組み込まれる、米国特許出願公開第2007/0100332号、同第2009/0093806号、及び同第2009/0138007号には、カテーテル内に埋め込まれた力センサを使用して、カテーテルの遠位先端部と体腔内の組織との間の接触圧力を検知する方法が記載されている。
【0009】
「Zero−Drift Detection and Correction in Contact Force Mesurements」と題された、Turgemanらによる同時係属中並びに共通譲渡された米国特許出願シリアル番号第12/938,458号は、力センサに加えられた力を示す複数の測定値の検出に基づいた以降の測定に使用するために、このようなカテーテルにおける力センサに関するベースライン読取りを設定する方法並びにその測定値が予め規定された量を超える量によって変動されないことを決定する方法を開示し特許権を主張している。
【発明の概要】
【課題を解決するための手段】
【0010】
本発明は、患者の体内で使用中の力検出用カテーテル又は他のプローブの較正のためのシステム及び方法を対象とする。
【0011】
プローブの遠位端部の近辺に力センサを有するプローブを較正するための本発明の方法は、患者の体腔内にプローブを挿入することから開始する。プローブの遠位端部に加えられた力を示す力センサからの第1の信号が、プローブに作動可能に接続されているプロセッサによって受け取られる。プローブの遠位先端部が患者の組織に接触していないことの検証が行われねばならず、次いでプロセッサが、プローブから発せられる第1の信号を、ゼロ点の力の読取りに等量となるように設定する。次いで、力センサからのその後の読取りが、力のゼログラム、すなわち組織接触がない状態に対するこの再較正されたベースラインに基づいて調整される。
【0012】
この方法の他の工程では、プローブの遠位先端部の位置を三次元空間で示すプローブからの位置情報を信号プロセッサにて受け取る。プローブの遠位先端部のこの位置は、プローブが患者の体腔の組織と接触していないことが検証された後に、ゼロ点ゾーンの位置として設定される。検証は、自動的又は使用者の入力で実行され得る。例えば、ゼロ点ゾーンは、ゼログラムの力を示し、かつ電子解剖学的マッピングシステムにおいて再構築された形状から閾値距離(d)を超えて離れている位置を記録することによって自動的に作り出される。このようにして、自動ゼロ点ゾーンが単一点からより大きな三次元空間に拡がるようにリセットする直後の読取りがまだゼロである間に、再構築された形状が位置データと合わせて使用され得る。
【0013】
次いで、この格納されたゼロ点合わせゾーンの位置情報は、二つの方法で使用される。第一の方法では、力がプローブの遠位端に加えられたその瞬間を示す力センサからの追加の信号をプロセッサが受け取る場合に、プローブは格納されたゼロ点合わせゾーン位置に操作されてもよい。この格納されたゼロ点合わせゾーン位置では、プローブは患者の組織と接触していないと見なされるために、プロセッサは、力センサからのこの信号の読取りをゼロ点の力読取りと等価であるものと設定する。
【0014】
別の方法としては、プローブの遠位先端部の位置は継続的に監視されてもよく、位置が格納されたゼロ点合わせゾーン位置に等価である場合、プローブの遠位端に力が加えられたことを示す力センサから受け取られた信号は、ゼロ点の力読取りへと自動的に再較正される。
【0015】
患者の組織にプローブが接触しているか否かを検証する工程は、プローブの遠位先端部が組織と接触していることを判定するために心電図データ、電極インピーダンスデータ、蛍光透視撮像、リアルタイムMRI、リアルタイムCT又は電子解剖学的マッピングのうちの少なくとも1つを使用して達成され得る。カテーテルの遠位先端部に関する位置情報を受け取る工程は、磁気位置センサのような位置センサの三次元(x,y,z)空間座標並びにピッチ、ロール及びヨーを受け取ることを伴う。
【0016】
限定されるものではないが、心室内で使用される電気生理学的アブレーションカテーテルを含む新規方法が心臓カテーテルに適用され得る。心臓カテーテルが、先端部又はその近辺に電極を有するアブレーションカテーテルである場合、このような電極(複数可)はまた、ECGデータ及び/又はインピーダンスデータを記録するために使用され得る。他の力検出較正処置とは異なり、この方法は、心臓処置中に使用されることが可能である。
【0017】
同様に、力検出プローブの再較正ためのシステムは、患者の体腔内に挿入されることが可能で、並びにプローブに加えられる力を経時的に変化する力として示す複数の信号を提供する力センサを含むことが可能であるプローブを備える。このシステムは、プローブが患者の体腔内の組織と接触しているかどうかを判定するための手段を更に含む。信号プロセッサは、力を示す複数の信号を受け取り、並びにプローブ上の力を示す力読取りを発生するように構成されている。プローブが接触状態にあるかどうかを判定する手段が、プローブと患者の体腔との間の接触がないと判定する場合、信号プロセッサは、力読取りをゼロ点に設定する。
【0018】
このシステムは、三次元空間内のプローブの位置を示す複数の電気信号をプロセッサに提供することが可能な位置センサを更に含み、この中で、所定の位置においてプローブと患者の体腔との間に接触がない場合、プローブの位置は、ゼロ点合わせゾーンとしてメモリ内に格納される。このプロセッサは、プローブの位置を自動的に監視し、プローブがゼロ点ゾーンとしてメモリ内に格納された位置にある場合、力読取りをゼロ点にリセットする(あるいは使用者に、点検し、ベースライン読取りをゼロ点にリセットするように警告する)。システム使用者は、心電図又はプローブ上の少なくとも1つの電極からのインピーダンス信号、又は蛍光透視画像、リアルタイムCT画像又はリアルタイムMRI画像、若しくは電子解剖学的マッピングシステムからの画像又は情報のような種々の情報に基づいて、カテーテルと患者の組織との間の接触を判定する。システムは、位置情報が取得された心臓周期内のポイントに関する情報を有したゼロ点合わせゾーン位置を格納する。更に、システムは、位置情報が取得された呼吸周期のポイントに関する情報を有したゼロ点合わせゾーンを格納する。
【図面の簡単な説明】
【0019】
本発明のこれらの及び他の特徴及び利点は、添付図面と合わせて考慮するとき、以下の詳細な説明を参照することにより、より十分に理解されるであろう。
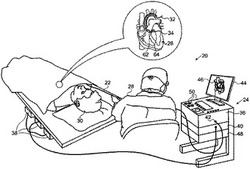
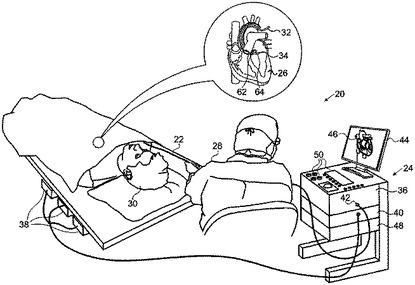
【図1】本発明の実施形態による力検出用カテーテル用の自動較正システムの概略説明絵図。
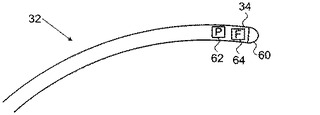
【図2】本発明の実施形態による力検出用カテーテルの遠位部分の細部を示す概略側面図。
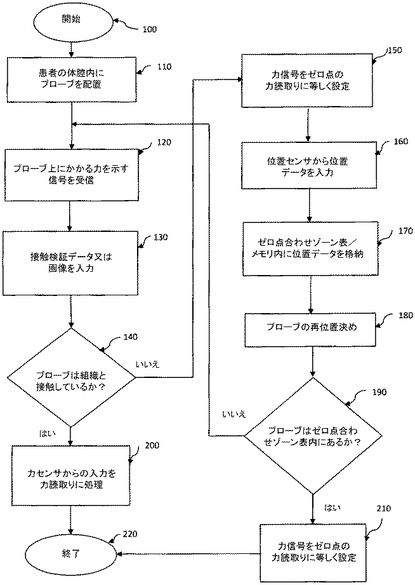
【図3】本発明の1つの実施形態による、力検出用カテーテルを較正する方法を例示するフローチャート。
【発明を実施するための形態】
【0020】
例えば心臓アブレーション及び心臓内電子解剖学的マッピングなどのような多くの診断用及び治療用処置は、その遠位先端部に搭載された少なくとも1つの電極を有するカテーテルのような最小侵襲性プローブを使用する。この電極は、典型的には、心不整脈の治療において、プローブが心内膜のような体腔表面に押しつけられる場合に作動される。カテーテルと組織の間に接触があることを知ること、並びにカテーテルが組織の上にあると断定する場合の力の量を知ることは、電子生理学医のようなカテーテル又はプローブの使用者にとって重要である。より新しい力検出用カテーテルは、このような力測定フィードバックを使用者にもたらす。
【0021】
心内膜上にある遠位先端部によって及ぼされる力を正確に測定するために、カテーテルと組織のような別の対象物との間に接触が存在しない場合、力センサは一般的に、製造中に力のゼログラムの読取りを生み出すように較正される。一旦この較正が実行され、並びに力検出用カテーテルからのベースライン情報が決定されれば、力センサからのその後の測定は、カテーテルの先端部に及ぼされる力の値をもたらすために使用され得る。
【0022】
力検出用カテーテル内の力センサはアナログ構成要素を使用するために、このセンサは、温度及び湿度のような環境条件で変化し、並びに構成要素の老化により変化する場合がある。このような変化は、力検出用カテーテルが力のゼログラムに対する適切なベースラインにもはや較正されない状態をもたらし、これによって、カテーテルの使用者に表示される検知された力に不正確性をもたらすことになる。正確な力の値が確実に得られるように、本発明のシステム及び方法は、予め定められた自動ゼロ点ゾーンにおける力検出用カテーテルの自動再較正を提供する。ゼロ点合わせゾーンは、カテーテルの先端部が組織に接触していない場合の、複数個のカテーテル先端部位置を判定することによって検出される。これは、組織とカテーテルの先端部との間の接触の有無を判定するための心電図(ECG)又はインピーダンス信号、蛍光透視撮像、リアルタイムCT撮像又はリアルタイムMRI撮像システム及び/又は電子解剖学的マップあるいはこれら診断法の組み合わせを使用することによって実行され得る。システムあるいは使用者が、組織接触がないことを確認した場合、この位置は自動ゼロ点ゾーン位置であると決定され、この自動ゼロ点ゾーンでは、ベースライン読取りが力のゼログラムであるように力検出用カテーテルが再較正され、これによっていかなる較正ドリフトも補償されるであろう。
【0023】
図1は、本発明の一実施形態による自動ゼロ点ゾーン較正補償を使用する医療システム20の図である。システム20、特に制御コンソール24は、例えばBiosense Webster,Inc.(California、Diamond Bar)によって製造されたCarto(商標)システムに基づいている。システム20は、EPアブレーション又はマッピングカテーテルのようなプローブ22と、制御コンソール24とを含む。本明細書で説明する実施形態では、プローブ22は、診断処置又は治療処置のため、例えば心臓26内の電位をマッピングするため、又は心臓26の心内膜若しくは他の組織のアブレーションを実行するために使用されると想定される。しかしながら、このようなプローブ22は、患者の心臓若しくは他の臓器又は血管構造において別の用途がある場合もある。
【0024】
例えば心臓専門医、電気生理学医又は介入放射線医のような操作者28は、プローブ22の遠位端32が心室26(あるいは他の体腔又は血管構造)に入るように、プローブ22を患者30の血管系を通して挿入する。操作者28は、プローブ22の遠位先端部34が、所望の位置又は複数位置における心内膜組織と係合するように、プローブ22を前進させる。プローブ22は通常、その近位端において適切なコネクターによってコンソール24に接続される。
【0025】
コンソール24は、典型的には磁気位置検知を使用して、心臓26内側の遠位端32の位置座標を決定する。この目的のために、コンソール24内の駆動回路36が、磁場発生器38を駆動し、患者30の身体内部に磁場を生成する。典型的には、この磁場発生器38は、患者30の外部の患者胴体の下方の、既知の位置に設置されるコイルを含む。これらのコイルは、心臓26を包含する既定の作業ボリューム内に磁場を生成する。プローブ22の遠位端32内の磁界センサ62(図2に示す)が、これらの磁界に応じて電気信号を生成する。典型的には位置(x、y、z)座標及び配向(ロール、ピッチ、ヨー)座標の双方を包含する遠位端の位置座標を決定するために、信号プロセッサ40が、これら信号を処理する。この位置検知法は、上記のCARTOシステムにおいて実行されており、その詳細が、米国特許第5,391,199号、同第6,690,963号、同第6,484,118号、同第6,239,724号、同第6,618,612号及び同第6,332,089号、PCT特許公開WO 96/05768、並びに米国特許出願公開第2002/0065455 A1号、同第2003/0120150 A1号及び同第2004/0068178 A1号に開示されており、その開示事項は全て、参照により本願に組み込まれる。
【0026】
信号プロセッサ40は、典型的には、プローブ22からの信号を受信し、コンソール24の他の構成要素を制御するための、適切なフロントエンド回路及びインターフェース回路を備えた、汎用コンピュータを含む。このプロセッサ40は、本明細書で説明する機能を実行するようにソフトウェアでプログラムされてもよい。ソフトウェアは、例えばネットワークを通じて電子的形態で操作部24にダウンロードするか、又は、光学的、磁気的、若しくは電子的記録媒体などの有形媒体上に提供することができる。あるいは、プロセッサ40の機能の一部又は全てを、専用の又はプログラム可能な、デジタルハードウェア構成要素によって実行することができる。プローブ22及びシステム20の他の構成要素から受け取った信号に基づいて、プロセッサ40は、ディスプレイ44を駆動し、患者身体内での遠位端32の位置に関する画像46を通しての視覚的フィードバック、並びに進行中の処置に関する状況情報及びガイダンスを、操作者28に与える。
【0027】
あるいは、又は更に、システム20は、患者30の身体内部でプローブ22を操縦及び操作するための、自動化機構を含み得る。そのような機構は、典型的には、カテーテルの長手方向の動き(前進/後退)、及びカテーテルの遠位端の横方向の動き(たわみ/操舵)の双方を制御することが可能である。この種のいくつかの機構は、この目的のために、例えば直流の磁場を使用する。そのような実施形態では、プロセッサ40は、カテーテル内の磁界センサより供給された信号に基づき、カテーテルの動きを制御する制御入力を発生させる。これらの信号は、カテーテルの遠位末端の位置及び以下で更に記述される遠位末端に加えられる力の両方を示す。
【0028】
プロセッサ40は、メモリ48内に、画像46を表すデータを記憶する。一部の実施形態では、操作者28は、1つ以上の入力デバイス50を使用して、画像46を操作することができる。図1は、特定のシステム構成を示しているが、他のシステム構成もまた、本発明の実施形態を実装するために採用することができ、したがって、これらは本発明の趣旨及び範囲内であると見なされる。例えば、本明細書にて以下で説明する方法は、インピーダンス式の位置センサ又は超音波位置センサなど、上述した磁界センサ以外のタイプの位置変換器を使用して適用されてもよい。本明細書で用いる際の「位置変換器」という用語は、プローブ22上に取り付けられる素子であって、その素子の座標を示す信号をコンソール24に受信させるものを指す。位置変換器はしたがって、変換器が受信したエネルギーに基づいて制御ユニットに向けて位置信号を発生させる受信器をプローブ上に備えていてもよく、あるいは、プローブに対して外側にある受信器によって検知されるエネルギーを放出する送信器を備えていてもよい。更には、本明細書で以下に説明する方法は、カテーテルだけではなく、心臓並びにヒトの身体の他の臓器及び血管構造における別タイプのプローブをも使用する治療的又は診断的用途に同様に適用されてもよい。
【0029】
本実施形態において、プロセッサ40は、プローブ22の遠位端32内部の力センサ64から受け取った信号測定値を監視する。図2は、本発明の実施形態によるプローブ22の遠位端部32の概略断面図である。詳細には、図2は、治療的及び/又は診断的活動で使用されるプローブ22の遠位端32の機能的要素を示している。プローブ22の遠位先端部34にある電極60(例えば、アブレーション電極)は、典型的には、プラチナ/イリジウム合金若しくは金又は金合金のような別の好適な生体適合性金属から作られている。あるいは、例えば複数の環電極のような、プローブの長さに沿った複数電極(図示せず)が、この目的のために用いられてもよい。
【0030】
位置センサ(P)62は、信号をコンソール24に送信し、ここでプローブ22の遠位端32の位置座標が示される。位置センサ62は、1つ以上の小型コイルを含み得、典型的には、異なる軸に沿って配向される複数のコイルを含む。別の方法として、位置センサ62は、別のタイプの磁気センサ、つまり位置変換器として働く電極か(wither)、又はインピーダンス式位置センサ若しくは超音波位置センサなどの他のタイプの位置変換器を備えていてもよい。図2は、単一の位置センサ62を有したプローブを示しているが、本発明の実施形態は、複数の位置センサを有したプローブもまた用いてもよい。
【0031】
代替的な実施形態では、位置センサ62及び磁場発生器38の役割を逆転させることができる。駆動回路36が、プローブ22の遠位端32内の磁場発生器を駆動して、1つ以上の磁場を発生させてもよい。発生器38内のコイルは、磁場を検知し、それらの磁場の成分の振幅を示す信号を発生させるように構成されてもよい。プロセッサ40は次いで、心臓26内部のプローブ22の遠位端32の位置座標を決定するために、これら信号を受け取りかつ処理する。
【0032】
力センサ64は、遠位先端部34が身体内組織に対して及ぼす力を示す信号を、コンソールに搬送することによって、遠位先端部34が心臓26の心内膜組織(又は他の組織)に加える力を測定する。一実施形態では、力センサ64は、遠位端32においてバネ又はらせん状切断管で分離された磁場送信機と受信機とを備える。プロセッサ40によって受け取られた受信機からの情報は、バネのたわみの測定に基づいた力の表示を生み出すために使用される。このような力センサ64は、それらの開示が参照により本明細書に組み込まれた、米国特許公開第2009/0093806号及び同第2009/0138007号によって構築されてもよい。あるいは、遠位端32は、そのような力の表示を提供することができる他のタイプ力センサ64をいくつか備えてもよい。
【0033】
図3は、本発明の一実施形態による、力検出用カテーテルを較正する方法を概略的に例示するフローチャートである。構成要素ドリフトに関する較正及び補償のプロセスは、工程100で開始する。工程110では、プローブが患者の体腔内に配置(又は再配置)され、より詳細には、好ましい実施形態において、カテーテルの遠位端が患者の体腔内にあるように、カテーテルが操作される。上述のように、カテーテルは、力センサ64と位置センサ62とを含むことが好ましい。工程120で、力センサ64からの信号が、プロセッサ40によって受け取られる。プローブ32の遠位先端部34で検知された力は、先端部が体腔内の組織と接触したり離れたりするのに伴って経時的に変化するために、この信号は経時的に変化するであろう。工程130では、カテーテルの先端部が患者の組織と接触しているかを実証するために、1つ以上の供給源からのデータ又は画像が入力される。前述のように、この入力は、心電図(ECG)データ又は先端部電極60のようなプローブ32上の電極からの電気信号として取得されたインピーダンスであり得、又は蛍光透視画像、リアルタイムCT画像、リアルタイム磁気共鳴(MRI)画像若しくは電子解剖学的マッピングシステムからの画像データであり得る。プロセッサ40は、電気ECG若しくはインピーダンス信号に基づいて組織接触を自動的に認識するようにプログラムされていてもよく、又は組織接触を判定するための視覚的画像データに基づいて、プロセッサが使用者に入力を要求してもよい。プロセッサ40はまた、Carto(登録商標)システムのような電子解剖学的マッピングから再構築された組織マップからプローブ32までの距離に基づいて、組織接触を判定するようにプログラムされてもよい。距離(d)が予め定められた閾値を超える場合、プロセッサ40は、プローブ32が患者の組織と接触していないと見なすようにプログラムされ得る。いずれかのタイプの決定方法を用いて、工程140にて、プローブ32が患者の組織に接触しているかどうかが判定される。接触がない場合、プロセスが工程150に枝分かれし、そこでは工程120で取得された力信号が、将来の読取りのために、ベースライン又は「ゼロ」点として設定され、すなわち、将来の力読取りがこの読取りをオフセットとして用いて、後続する力センサ入力に基づいて力のグラムの数値を決定する。別の方法としては、システムにより、力センサからの読み取りが自動的にゼロ点補正されるよりはむしろ、それを「ゼロに戻す」ことを使用者が好むかを確認するための使用者入力を求めることも可能である。工程160において、プローブ32の遠位先端部34の少なくとも三次元空間座標及び好ましくは3つの配向度を提供するプローブ32上の位置センサ62から、位置データが入力される。次いで工程170で、後ほどの使用のために、この位置情報が、自動ゼロ点ゾーンの参照表内に格納される。
【0034】
工程180では、心臓内のプローブ及び他の医療処置が処置中に通常的に再位置決めされるように、プローブが再位置決めされる。工程190に示された本方法の別の実施形態では、プローブの位置が継続的に監視され、工程170で作成された表に格納されたゼロ点合わせゾーン位置のリストと比較される。工程190において、プローブがゼロ点合わせゾーン表内の位置と等価の位置にあることをプロセッサ40が決定する場合には、その位置での力信号は、ベースライン読み取りとしてとして再び使用され、すなわち、使用者に報告される力読取りは、プローブ32内の力センサからの力信号入力についてはゼロになるであろう。このようにして、力検出用プローブは、プローブの位置が格納されたゼロ点合わせゾーン位置のうちの1つに入るたび毎に、自動的に再較正されるであろう。
【0035】
工程190で、プローブがゼロ合わせゾーン表内の位置にない場合には、力センサからの信号は、工程130において検証データ及び/又は検証画像と一緒に入力され、更に工程140で、この組織接触検証照会が反復されるであろう。一旦組織接触が工程140において判定されれば、力センサ64からの情報が使用されて、操作者28により通常的にディスプレイ44上に表示される力読取りが決定されるであろう。力読取りは、通常グラムで表示されるが、測定値の他の単位で表示されてもよい。
【0036】
以下の特許請求の範囲における機能的要素に加えて、全ての手段又は工程の対応する構造、材料、作用及び等価物は、特許請求される他の要素と組み合わせて、その機能を実施するための任意の構造、材料、又は作用を、明確に特許請求されるものとして包含することを意図したものである。本開示の説明は、例示及び説明の目的で提示されているが、開示した形態における開示内容に対して網羅的又は限定的となることを意図したものではない。当業者には、本開示の範囲及び趣旨から逸脱することなく、多くの修正及び変更が明らかとなるであろう。その実施形態は、本開示の原理及び実際的な応用について最良に説明するため、並びに、当業者が、種々の修正形態を伴う各実施形態に関する開示内容を、企図される特定の用途に適するものとして理解できるようにするために、選択し説明したものである。
【0037】
上記に述べた実施形態は、一例として引用したものであって、本発明は上記に具体的に図示及び述べたものに限定されないことが認識されるであろう。むしろ本発明の範囲には、本明細書の上記の様々な特徴の組み合わせ及び準組み合わせの両方が含まれ、並びに、当業者が前述の説明を読むことによって見出され得る、既知の技術では開示されていないような変形及び修正も含まれる。
【0038】
〔実施の態様〕
(1) プローブの遠位端近辺に力センサを有する前記プローブを較正するための方法であって、
前記プローブを患者の体腔内に挿入させる工程と、
前記プローブの遠位端に加えられた力を示す前記力センサからの第1の信号を、信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部が前記患者の組織に接触していないことを検証する工程と、
前記力センサからの前記第1の信号をゼロ点の力読取りに設定するように、前記プロセッサを較正する工程とを含む、前記方法。
(2) 前記プローブの前記遠位先端部の位置を三次元空間で示す位置情報を、前記信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部の前記位置を自動ゼロ点ゾーンの位置として格納する工程とを更に含む、実施態様1に記載の方法。
(3) 前記プローブを、格納された自動ゼロ点ゾーン位置へと操作する工程と、
前記プローブの前記遠位端に加えられる力を示す前記力センサからの第2の信号を前記信号プロセッサで受け取る工程と、
前記力センサからの前記第2の信号をゼロ点の力読取りに設定するように、前記プロセッサを再較正する工程とを更に含む、実施態様2に記載の方法。
(4) 前記プローブの前記遠位先端部の位置を継続的に監視する工程と、
前記プローブの前記遠位端に加えられた力を示す前記力センサからの第2の信号を、前記信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部の前記位置が、自動ゼロ点ゾーン位置と等価である場合、前記力センサからの前記第2の信号をゼロ点の力読取りへと設定するように前記プロセッサを再較正する工程とを更に含む、実施態様2に記載の方法。
(5) 前記検証する工程が、前記プローブの前記遠位先端部が組織と接触していることを判定するために、心電図データ、電極インピーダンスデータ、蛍光透視撮像、リアルタイムMRI、リアルタイムCT又は電子解剖学的マッピングシステムの画像又はデータの中の少なくとも1つを使用することを含む、実施態様1に記載の方法。
(6) 前記カテーテルの前記遠位先端部に関する位置情報を受け取る前記工程が、前記位置センサの空間座標並びにピッチ、ロール及びヨーを受け取ることを含む、実施態様2に記載の方法。
(7) 前記プローブが心臓カテーテルを含む、実施態様1に記載の方法。
(8) 前記体腔が心腔を含む、実施態様1に記載の方法。
(9) 前記心臓カテーテルが、その先端部に電極を有するアブレーションカテーテルであり、前記先端部電極がまた、ECGデータ及び/又はインピーダンスデータを記録するために用いられ得る、実施態様7に記載の方法。
(10) 前記自動ゼロ点ゾーンが、電子解剖学的マッピングシステムからの再構成された組織形状を使用する単一ポイントから拡張され、検証かつ位置決めされた前記単一の自動ゼロ点ゾーン位置周辺の三次元自動ゼロ点ゾーンを決定する、実施態様2に記載の方法。
【0039】
(11) 力検出用プローブを再較正するためのシステムであって、
患者の体腔内に挿入されることが可能なプローブであって、力が経時的に変化するのに伴って前記プローブに加えられた前記力を示す複数の信号を経時的に提供する力センサを備える、プローブと、
前記プローブが前記患者の前記体腔内の組織と接触しているかどうかを判定するための手段と、
前記力を示す前記複数の信号を受け取るように構成され、かつ前記プローブ上の前記力を示す力読取りを発生するプロセッサとを含み、
前記プローブが接触状態にあるかどうかを判定するための前記手段が前記プローブと前記患者の前記体腔との間に接触がないことを判定する場合に、前記プロセッサが前記力読取りをゼロ点に設定する、前記システム。
(12) 前記システムが、三次元空間内での前記プローブの前記位置を示す複数の電気信号を前記プロセッサに提供することが可能な位置センサを更に含み、所定の位置において前記プローブと前記患者の前記体腔との間に接触がない場合に、前記プローブの前記位置が、自動ゼロ点ゾーンとしてメモリ内に格納される、実施態様11に記載のシステム。
(13) 前記プロセッサが、前記プローブの前記位置を監視し、かつ前記プローブが自動ゼロ点ゾーンとしてメモリ内に格納された位置にある場合に前記力読取りをゼロ点にリセットする、実施態様12に記載のシステム。
(14) 前記プローブが、電気生理学カテーテルである、実施態様11に記載のシステム。
(15) 前記電気生理学カテーテルが、前記カテーテルの前記遠位端上に搭載された少なくとも1つの電極を有する、実施態様14に記載のシステム。
(16) 前記カテーテルと前記患者の前記組織との間の接触を判定するための前記手段が、心電図及び/又は前記電極の少なくとも1つからのインピーダンス信号に基づいている、実施態様15に記載のシステム。
(17) 前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、蛍光透視画像である、実施態様11に記載のシステム。
(18) 前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、リアルタイムCT画像である、実施態様11に記載のシステム。
(19) 前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、リアルタイム磁気共鳴画像(MRI)である、実施態様11に記載のシステム。
(20) 前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、電子解剖学的マッピングシステムからのデータ及び/又は画像である、実施態様11に記載のシステム。
【0040】
(21) 前記自動ゼロ点合わせゾーン位置には前記位置情報が取得された心臓周期内のポイントに関する情報が格納されている、実施態様13に記載のシステム。
(22) 前記自動ゼロ点合わせゾーン位置には前記位置情報が取得された呼吸周期内のポイントに関する情報が格納されている、実施態様13に記載のシステム。
(23) 前記位置センサが、前記プローブの三次元位置座標と3つの配向度(ピッチ、ロール及びヨー)とを前記プロセッサに提供することが可能な磁気位置センサである、実施態様12に記載のシステム。
(24) 前記電子解剖学的マッピングシステムからのデータに基づく前記プローブと前記患者の前記組織との間の前記距離を使用して、組織接触があるかどうかを判定する、実施態様20に記載のシステム。
(25) 前記距離dが予め定められた閾値を超える場合に、自動的に、前記システムは組織接触がないと見なす、実施態様24に記載のシステム。
(26) 前記自動ゼロ点ゾーンが、電子解剖学的マッピングシステムから再構築された組織形状を使用する単一ポイントから拡張され、検証かつ位置決めされた前記単一の自動ゼロ点ゾーン位置周辺の三次元自動ゼロ点ゾーンを決定する、実施態様20に記載のシステム。
【技術分野】
【0001】
本発明は、カテーテルのような医療用プローブを使用する方法に関し、特にヒトの身体の治療、特に心不整脈の治療のための力検出用カテーテルに関する。より具体的には、本発明は、心臓処置中の使用における力検出用プローブ又はカテーテルの動的、インビボ較正に関する。
【背景技術】
【0002】
広範囲にわたる医療処置が、カテーテルのようなプローブを患者の身体内に配置させることを伴う。このようなプローブを追跡するために、位置検知システムが開発されている。磁気的位置検知は、当該技術分野において既知の方法の1つである。磁気的位置検知においては、一般的に、磁場発生器が患者の体外の既知の位置に配置される。プローブの遠位端内の磁界センサがこれらの磁界に応じて電気信号を生成し、この信号が処理されてプローブの遠位端の位置座標が決定される。これらの方法及びシステムは、米国特許第5,391,199号、同第6,690,963号、同第6,484,118号、同第6,239,724号、同第6,618,612号及び同第6,332,089号、PCT国際特許公開第WO 1996/005768号、並びに米国特許出願公開第2002/006455号、同第2003/0120150号及び同第2004/0068178号に記述されており、これら開示は参照により全体が本明細書に組み込まれる。
【0003】
これらタイプのプローブ又はカテーテルが極めて有用であると証明されている医療処置の1つは、心不整脈の治療におけるものである。心不整脈及び特に心房細動は、特に高齢者集団では、一般的かつ危険な病状として存続する。正常の洞律動を有する患者では、心房、心室及び興奮伝導組織を含む心臓は、電気的に興奮して、同期的な、パターン化した形で拍動する。心不整脈の患者では、心臓組織の異常な領域は、正常の洞律動を有する患者のように通常の導電組織に結びついた同期的な拍動周期に従わない。これに対して、心組織の異常領域では隣接組織への伝導が異常であり、これにより心臓周期が乱れて非同期的な心律動となる。こうした異常伝導は、例えば、房室(AV)結節及びヒス束の伝導経路に沿った洞房(SA)結節の領域、又は心室及び心房室の壁を形成する心筋組織など、心臓の様々な領域で生じることがこれまでに知られている。
【0004】
心房性不整脈を含む心不整脈は、心房室の回りで散乱し、かつしばしば自己増殖する電気インパルスの複数の非同期的ループを特徴とする、マルチウェーブレットリエントラント型となる可能性がある。マルチウェーブレットリエントラント型に代わって又はそれに加えて、心不整脈はまた、心房の組織の孤立領域が、急速で反復的な様式で自律的に興奮する場合など、局所的な起源を有することもある。心室性頻脈症(Vーtach又はVT)は、心室のうちの1つにおいて起こる頻脈症又は高速な心律動である。これは、心室細動及び突然死につながり得るため、場合によっては重篤な不整脈となる。
【0005】
不整脈の1つのタイプ、心房細動は、洞房結節によって生成される通常の電気インパルスが、心房及び肺静脈内で生じる無秩序な電気インパルスによって圧倒され、不規則なインパルスが心室に伝導する場合に発生する。不規則な心拍が結果的にもたらされ、これは、数分から数週間、又は更に数年間、持続する場合がある。心房細動(AF)は、しばしば脳卒中が原因となる死亡のリスクの、僅かな増大につながる、慢性的な症状である場合が多い。リスクは年齢と共に増大する。80歳を超える人口の約8%が、ある程度のAFを有している。心房細動は、無症候性である場合が多く、それ自体は概ね致死性ではないが、動悸(palpatations)、脱力感、失神、胸痛、及び鬱血性心不全をもたらす恐れがある。脳卒中のリスクは、AFの間に増大するが、これは、収縮が不十分な心房及び左心耳内に、血液が溜まって血栓を形成するためである。AFに関する第一選択の治療法は、心拍数を減らすか、又は心律動を通常に戻す、投薬治療である。更には、AFを有する患者は、脳卒中のリスクから守るために、抗凝血剤を与えられる場合が多い。そのような抗凝血剤の使用は、それ自体のリスクである内出血を伴う。一部の患者では、投薬治療は十分ではなく、その患者のAFは、薬剤不応、すなわち、標準的な薬理学的介入では治療不可能であると判断される。同期電気的除細動もまた、AFを通常の心律動に変換するために使用することができる。あるいは、AFの患者は、カテーテルアブレーションによって治療される。しかしながら、そのようなアブレーションは、全ての患者で成功するわけではない。それゆえ、そのような患者に関する、代替的な治療法を有する必要性が存在する。外科的アブレーションは、1つの選択肢であるが、また、外科手術に従来より関連する、付加的なリスクも有する。
【0006】
心不整脈の診断及び治療には、心臓組織、特に心内膜及び心臓容積の電気的特性をマッピングすること、並びにエネルギーの適用によって心臓組織を選択的にアブレーションすることが含まれる。そのようなアブレーションにより、望ましくない電気信号が心臓のある部分から別の部分へと伝播するのを止めるかあるいは修正することができる。焼灼方法は、非導電病変の形成により、望ましくない電気経路を破壊する。損傷部位を形成するための様々なエネルギー供給の様式がこれまでに開示されており、心組織壁に沿って伝導遮断部分を形成するためのマイクロ波、レーザー、及びより一般的には高周波エネルギーの使用が挙げられる。マッピングに続いてアブレーションを行う2段階の手術においては、通常、1以上の電気センサ(又は電極)を収容したカテーテルを心臓の内部に前進させ、多数の点におけるデータを取得することによって心臓内の各点における電気活動が感知及び測定される。次いで、これらのデータを利用して、このアブレーションを行うべき心臓内の標的領域を選択する。
【0007】
電極カテーテルは、長年にわたり医療行為で一般的に用いられている。電極カテーテルは心臓内の電気的活動を刺激及びマッピングし、異常な電気的活動が見られる部位を除去するために用いられる。使用時には、電極カテーテルは大腿動脈などの主要な静脈又は動脈、例えば大動脈、に挿入された後、対象とされる心室内に導かれる。典型的なアブレーション処置は、その遠位端に先端電極を有するカテーテルを、心腔内に挿入することを伴う。参照電極が、一般的には患者の皮膚にテープで貼り付けられるか、あるいは心臓内又は心臓付近に配置されている第2のカテーテルによって、提供される。RF(高周波)電流をアブレーションカテーテルの先端電極に通電すると、先端電極の周囲の媒質(すなわち、血液及び組織)に参照電極に向かって電流が流れる。電流の分布は、組織よりも導電性が高い血液に対して組織と接触した電極表面の量によって決まる。組織の電気抵抗によって組織が加熱される。組織が充分に加熱されると心組織の細胞が破壊され、心組織内に非導電性の損傷部位が形成される。
【0008】
したがって、アブレーションカテーテル又は他のカテーテルを体内、特に心内膜組織近くに配置させる場合、カテーテルの遠位先端部をその組織と直接接触させることが望ましい。この接触は、例えば、遠位先端部と体組織との間の接触を測定することによって、確かめることができる。その開示内容が参照として本明細書に組み込まれる、米国特許出願公開第2007/0100332号、同第2009/0093806号、及び同第2009/0138007号には、カテーテル内に埋め込まれた力センサを使用して、カテーテルの遠位先端部と体腔内の組織との間の接触圧力を検知する方法が記載されている。
【0009】
「Zero−Drift Detection and Correction in Contact Force Mesurements」と題された、Turgemanらによる同時係属中並びに共通譲渡された米国特許出願シリアル番号第12/938,458号は、力センサに加えられた力を示す複数の測定値の検出に基づいた以降の測定に使用するために、このようなカテーテルにおける力センサに関するベースライン読取りを設定する方法並びにその測定値が予め規定された量を超える量によって変動されないことを決定する方法を開示し特許権を主張している。
【発明の概要】
【課題を解決するための手段】
【0010】
本発明は、患者の体内で使用中の力検出用カテーテル又は他のプローブの較正のためのシステム及び方法を対象とする。
【0011】
プローブの遠位端部の近辺に力センサを有するプローブを較正するための本発明の方法は、患者の体腔内にプローブを挿入することから開始する。プローブの遠位端部に加えられた力を示す力センサからの第1の信号が、プローブに作動可能に接続されているプロセッサによって受け取られる。プローブの遠位先端部が患者の組織に接触していないことの検証が行われねばならず、次いでプロセッサが、プローブから発せられる第1の信号を、ゼロ点の力の読取りに等量となるように設定する。次いで、力センサからのその後の読取りが、力のゼログラム、すなわち組織接触がない状態に対するこの再較正されたベースラインに基づいて調整される。
【0012】
この方法の他の工程では、プローブの遠位先端部の位置を三次元空間で示すプローブからの位置情報を信号プロセッサにて受け取る。プローブの遠位先端部のこの位置は、プローブが患者の体腔の組織と接触していないことが検証された後に、ゼロ点ゾーンの位置として設定される。検証は、自動的又は使用者の入力で実行され得る。例えば、ゼロ点ゾーンは、ゼログラムの力を示し、かつ電子解剖学的マッピングシステムにおいて再構築された形状から閾値距離(d)を超えて離れている位置を記録することによって自動的に作り出される。このようにして、自動ゼロ点ゾーンが単一点からより大きな三次元空間に拡がるようにリセットする直後の読取りがまだゼロである間に、再構築された形状が位置データと合わせて使用され得る。
【0013】
次いで、この格納されたゼロ点合わせゾーンの位置情報は、二つの方法で使用される。第一の方法では、力がプローブの遠位端に加えられたその瞬間を示す力センサからの追加の信号をプロセッサが受け取る場合に、プローブは格納されたゼロ点合わせゾーン位置に操作されてもよい。この格納されたゼロ点合わせゾーン位置では、プローブは患者の組織と接触していないと見なされるために、プロセッサは、力センサからのこの信号の読取りをゼロ点の力読取りと等価であるものと設定する。
【0014】
別の方法としては、プローブの遠位先端部の位置は継続的に監視されてもよく、位置が格納されたゼロ点合わせゾーン位置に等価である場合、プローブの遠位端に力が加えられたことを示す力センサから受け取られた信号は、ゼロ点の力読取りへと自動的に再較正される。
【0015】
患者の組織にプローブが接触しているか否かを検証する工程は、プローブの遠位先端部が組織と接触していることを判定するために心電図データ、電極インピーダンスデータ、蛍光透視撮像、リアルタイムMRI、リアルタイムCT又は電子解剖学的マッピングのうちの少なくとも1つを使用して達成され得る。カテーテルの遠位先端部に関する位置情報を受け取る工程は、磁気位置センサのような位置センサの三次元(x,y,z)空間座標並びにピッチ、ロール及びヨーを受け取ることを伴う。
【0016】
限定されるものではないが、心室内で使用される電気生理学的アブレーションカテーテルを含む新規方法が心臓カテーテルに適用され得る。心臓カテーテルが、先端部又はその近辺に電極を有するアブレーションカテーテルである場合、このような電極(複数可)はまた、ECGデータ及び/又はインピーダンスデータを記録するために使用され得る。他の力検出較正処置とは異なり、この方法は、心臓処置中に使用されることが可能である。
【0017】
同様に、力検出プローブの再較正ためのシステムは、患者の体腔内に挿入されることが可能で、並びにプローブに加えられる力を経時的に変化する力として示す複数の信号を提供する力センサを含むことが可能であるプローブを備える。このシステムは、プローブが患者の体腔内の組織と接触しているかどうかを判定するための手段を更に含む。信号プロセッサは、力を示す複数の信号を受け取り、並びにプローブ上の力を示す力読取りを発生するように構成されている。プローブが接触状態にあるかどうかを判定する手段が、プローブと患者の体腔との間の接触がないと判定する場合、信号プロセッサは、力読取りをゼロ点に設定する。
【0018】
このシステムは、三次元空間内のプローブの位置を示す複数の電気信号をプロセッサに提供することが可能な位置センサを更に含み、この中で、所定の位置においてプローブと患者の体腔との間に接触がない場合、プローブの位置は、ゼロ点合わせゾーンとしてメモリ内に格納される。このプロセッサは、プローブの位置を自動的に監視し、プローブがゼロ点ゾーンとしてメモリ内に格納された位置にある場合、力読取りをゼロ点にリセットする(あるいは使用者に、点検し、ベースライン読取りをゼロ点にリセットするように警告する)。システム使用者は、心電図又はプローブ上の少なくとも1つの電極からのインピーダンス信号、又は蛍光透視画像、リアルタイムCT画像又はリアルタイムMRI画像、若しくは電子解剖学的マッピングシステムからの画像又は情報のような種々の情報に基づいて、カテーテルと患者の組織との間の接触を判定する。システムは、位置情報が取得された心臓周期内のポイントに関する情報を有したゼロ点合わせゾーン位置を格納する。更に、システムは、位置情報が取得された呼吸周期のポイントに関する情報を有したゼロ点合わせゾーンを格納する。
【図面の簡単な説明】
【0019】
本発明のこれらの及び他の特徴及び利点は、添付図面と合わせて考慮するとき、以下の詳細な説明を参照することにより、より十分に理解されるであろう。
【図1】本発明の実施形態による力検出用カテーテル用の自動較正システムの概略説明絵図。
【図2】本発明の実施形態による力検出用カテーテルの遠位部分の細部を示す概略側面図。
【図3】本発明の1つの実施形態による、力検出用カテーテルを較正する方法を例示するフローチャート。
【発明を実施するための形態】
【0020】
例えば心臓アブレーション及び心臓内電子解剖学的マッピングなどのような多くの診断用及び治療用処置は、その遠位先端部に搭載された少なくとも1つの電極を有するカテーテルのような最小侵襲性プローブを使用する。この電極は、典型的には、心不整脈の治療において、プローブが心内膜のような体腔表面に押しつけられる場合に作動される。カテーテルと組織の間に接触があることを知ること、並びにカテーテルが組織の上にあると断定する場合の力の量を知ることは、電子生理学医のようなカテーテル又はプローブの使用者にとって重要である。より新しい力検出用カテーテルは、このような力測定フィードバックを使用者にもたらす。
【0021】
心内膜上にある遠位先端部によって及ぼされる力を正確に測定するために、カテーテルと組織のような別の対象物との間に接触が存在しない場合、力センサは一般的に、製造中に力のゼログラムの読取りを生み出すように較正される。一旦この較正が実行され、並びに力検出用カテーテルからのベースライン情報が決定されれば、力センサからのその後の測定は、カテーテルの先端部に及ぼされる力の値をもたらすために使用され得る。
【0022】
力検出用カテーテル内の力センサはアナログ構成要素を使用するために、このセンサは、温度及び湿度のような環境条件で変化し、並びに構成要素の老化により変化する場合がある。このような変化は、力検出用カテーテルが力のゼログラムに対する適切なベースラインにもはや較正されない状態をもたらし、これによって、カテーテルの使用者に表示される検知された力に不正確性をもたらすことになる。正確な力の値が確実に得られるように、本発明のシステム及び方法は、予め定められた自動ゼロ点ゾーンにおける力検出用カテーテルの自動再較正を提供する。ゼロ点合わせゾーンは、カテーテルの先端部が組織に接触していない場合の、複数個のカテーテル先端部位置を判定することによって検出される。これは、組織とカテーテルの先端部との間の接触の有無を判定するための心電図(ECG)又はインピーダンス信号、蛍光透視撮像、リアルタイムCT撮像又はリアルタイムMRI撮像システム及び/又は電子解剖学的マップあるいはこれら診断法の組み合わせを使用することによって実行され得る。システムあるいは使用者が、組織接触がないことを確認した場合、この位置は自動ゼロ点ゾーン位置であると決定され、この自動ゼロ点ゾーンでは、ベースライン読取りが力のゼログラムであるように力検出用カテーテルが再較正され、これによっていかなる較正ドリフトも補償されるであろう。
【0023】
図1は、本発明の一実施形態による自動ゼロ点ゾーン較正補償を使用する医療システム20の図である。システム20、特に制御コンソール24は、例えばBiosense Webster,Inc.(California、Diamond Bar)によって製造されたCarto(商標)システムに基づいている。システム20は、EPアブレーション又はマッピングカテーテルのようなプローブ22と、制御コンソール24とを含む。本明細書で説明する実施形態では、プローブ22は、診断処置又は治療処置のため、例えば心臓26内の電位をマッピングするため、又は心臓26の心内膜若しくは他の組織のアブレーションを実行するために使用されると想定される。しかしながら、このようなプローブ22は、患者の心臓若しくは他の臓器又は血管構造において別の用途がある場合もある。
【0024】
例えば心臓専門医、電気生理学医又は介入放射線医のような操作者28は、プローブ22の遠位端32が心室26(あるいは他の体腔又は血管構造)に入るように、プローブ22を患者30の血管系を通して挿入する。操作者28は、プローブ22の遠位先端部34が、所望の位置又は複数位置における心内膜組織と係合するように、プローブ22を前進させる。プローブ22は通常、その近位端において適切なコネクターによってコンソール24に接続される。
【0025】
コンソール24は、典型的には磁気位置検知を使用して、心臓26内側の遠位端32の位置座標を決定する。この目的のために、コンソール24内の駆動回路36が、磁場発生器38を駆動し、患者30の身体内部に磁場を生成する。典型的には、この磁場発生器38は、患者30の外部の患者胴体の下方の、既知の位置に設置されるコイルを含む。これらのコイルは、心臓26を包含する既定の作業ボリューム内に磁場を生成する。プローブ22の遠位端32内の磁界センサ62(図2に示す)が、これらの磁界に応じて電気信号を生成する。典型的には位置(x、y、z)座標及び配向(ロール、ピッチ、ヨー)座標の双方を包含する遠位端の位置座標を決定するために、信号プロセッサ40が、これら信号を処理する。この位置検知法は、上記のCARTOシステムにおいて実行されており、その詳細が、米国特許第5,391,199号、同第6,690,963号、同第6,484,118号、同第6,239,724号、同第6,618,612号及び同第6,332,089号、PCT特許公開WO 96/05768、並びに米国特許出願公開第2002/0065455 A1号、同第2003/0120150 A1号及び同第2004/0068178 A1号に開示されており、その開示事項は全て、参照により本願に組み込まれる。
【0026】
信号プロセッサ40は、典型的には、プローブ22からの信号を受信し、コンソール24の他の構成要素を制御するための、適切なフロントエンド回路及びインターフェース回路を備えた、汎用コンピュータを含む。このプロセッサ40は、本明細書で説明する機能を実行するようにソフトウェアでプログラムされてもよい。ソフトウェアは、例えばネットワークを通じて電子的形態で操作部24にダウンロードするか、又は、光学的、磁気的、若しくは電子的記録媒体などの有形媒体上に提供することができる。あるいは、プロセッサ40の機能の一部又は全てを、専用の又はプログラム可能な、デジタルハードウェア構成要素によって実行することができる。プローブ22及びシステム20の他の構成要素から受け取った信号に基づいて、プロセッサ40は、ディスプレイ44を駆動し、患者身体内での遠位端32の位置に関する画像46を通しての視覚的フィードバック、並びに進行中の処置に関する状況情報及びガイダンスを、操作者28に与える。
【0027】
あるいは、又は更に、システム20は、患者30の身体内部でプローブ22を操縦及び操作するための、自動化機構を含み得る。そのような機構は、典型的には、カテーテルの長手方向の動き(前進/後退)、及びカテーテルの遠位端の横方向の動き(たわみ/操舵)の双方を制御することが可能である。この種のいくつかの機構は、この目的のために、例えば直流の磁場を使用する。そのような実施形態では、プロセッサ40は、カテーテル内の磁界センサより供給された信号に基づき、カテーテルの動きを制御する制御入力を発生させる。これらの信号は、カテーテルの遠位末端の位置及び以下で更に記述される遠位末端に加えられる力の両方を示す。
【0028】
プロセッサ40は、メモリ48内に、画像46を表すデータを記憶する。一部の実施形態では、操作者28は、1つ以上の入力デバイス50を使用して、画像46を操作することができる。図1は、特定のシステム構成を示しているが、他のシステム構成もまた、本発明の実施形態を実装するために採用することができ、したがって、これらは本発明の趣旨及び範囲内であると見なされる。例えば、本明細書にて以下で説明する方法は、インピーダンス式の位置センサ又は超音波位置センサなど、上述した磁界センサ以外のタイプの位置変換器を使用して適用されてもよい。本明細書で用いる際の「位置変換器」という用語は、プローブ22上に取り付けられる素子であって、その素子の座標を示す信号をコンソール24に受信させるものを指す。位置変換器はしたがって、変換器が受信したエネルギーに基づいて制御ユニットに向けて位置信号を発生させる受信器をプローブ上に備えていてもよく、あるいは、プローブに対して外側にある受信器によって検知されるエネルギーを放出する送信器を備えていてもよい。更には、本明細書で以下に説明する方法は、カテーテルだけではなく、心臓並びにヒトの身体の他の臓器及び血管構造における別タイプのプローブをも使用する治療的又は診断的用途に同様に適用されてもよい。
【0029】
本実施形態において、プロセッサ40は、プローブ22の遠位端32内部の力センサ64から受け取った信号測定値を監視する。図2は、本発明の実施形態によるプローブ22の遠位端部32の概略断面図である。詳細には、図2は、治療的及び/又は診断的活動で使用されるプローブ22の遠位端32の機能的要素を示している。プローブ22の遠位先端部34にある電極60(例えば、アブレーション電極)は、典型的には、プラチナ/イリジウム合金若しくは金又は金合金のような別の好適な生体適合性金属から作られている。あるいは、例えば複数の環電極のような、プローブの長さに沿った複数電極(図示せず)が、この目的のために用いられてもよい。
【0030】
位置センサ(P)62は、信号をコンソール24に送信し、ここでプローブ22の遠位端32の位置座標が示される。位置センサ62は、1つ以上の小型コイルを含み得、典型的には、異なる軸に沿って配向される複数のコイルを含む。別の方法として、位置センサ62は、別のタイプの磁気センサ、つまり位置変換器として働く電極か(wither)、又はインピーダンス式位置センサ若しくは超音波位置センサなどの他のタイプの位置変換器を備えていてもよい。図2は、単一の位置センサ62を有したプローブを示しているが、本発明の実施形態は、複数の位置センサを有したプローブもまた用いてもよい。
【0031】
代替的な実施形態では、位置センサ62及び磁場発生器38の役割を逆転させることができる。駆動回路36が、プローブ22の遠位端32内の磁場発生器を駆動して、1つ以上の磁場を発生させてもよい。発生器38内のコイルは、磁場を検知し、それらの磁場の成分の振幅を示す信号を発生させるように構成されてもよい。プロセッサ40は次いで、心臓26内部のプローブ22の遠位端32の位置座標を決定するために、これら信号を受け取りかつ処理する。
【0032】
力センサ64は、遠位先端部34が身体内組織に対して及ぼす力を示す信号を、コンソールに搬送することによって、遠位先端部34が心臓26の心内膜組織(又は他の組織)に加える力を測定する。一実施形態では、力センサ64は、遠位端32においてバネ又はらせん状切断管で分離された磁場送信機と受信機とを備える。プロセッサ40によって受け取られた受信機からの情報は、バネのたわみの測定に基づいた力の表示を生み出すために使用される。このような力センサ64は、それらの開示が参照により本明細書に組み込まれた、米国特許公開第2009/0093806号及び同第2009/0138007号によって構築されてもよい。あるいは、遠位端32は、そのような力の表示を提供することができる他のタイプ力センサ64をいくつか備えてもよい。
【0033】
図3は、本発明の一実施形態による、力検出用カテーテルを較正する方法を概略的に例示するフローチャートである。構成要素ドリフトに関する較正及び補償のプロセスは、工程100で開始する。工程110では、プローブが患者の体腔内に配置(又は再配置)され、より詳細には、好ましい実施形態において、カテーテルの遠位端が患者の体腔内にあるように、カテーテルが操作される。上述のように、カテーテルは、力センサ64と位置センサ62とを含むことが好ましい。工程120で、力センサ64からの信号が、プロセッサ40によって受け取られる。プローブ32の遠位先端部34で検知された力は、先端部が体腔内の組織と接触したり離れたりするのに伴って経時的に変化するために、この信号は経時的に変化するであろう。工程130では、カテーテルの先端部が患者の組織と接触しているかを実証するために、1つ以上の供給源からのデータ又は画像が入力される。前述のように、この入力は、心電図(ECG)データ又は先端部電極60のようなプローブ32上の電極からの電気信号として取得されたインピーダンスであり得、又は蛍光透視画像、リアルタイムCT画像、リアルタイム磁気共鳴(MRI)画像若しくは電子解剖学的マッピングシステムからの画像データであり得る。プロセッサ40は、電気ECG若しくはインピーダンス信号に基づいて組織接触を自動的に認識するようにプログラムされていてもよく、又は組織接触を判定するための視覚的画像データに基づいて、プロセッサが使用者に入力を要求してもよい。プロセッサ40はまた、Carto(登録商標)システムのような電子解剖学的マッピングから再構築された組織マップからプローブ32までの距離に基づいて、組織接触を判定するようにプログラムされてもよい。距離(d)が予め定められた閾値を超える場合、プロセッサ40は、プローブ32が患者の組織と接触していないと見なすようにプログラムされ得る。いずれかのタイプの決定方法を用いて、工程140にて、プローブ32が患者の組織に接触しているかどうかが判定される。接触がない場合、プロセスが工程150に枝分かれし、そこでは工程120で取得された力信号が、将来の読取りのために、ベースライン又は「ゼロ」点として設定され、すなわち、将来の力読取りがこの読取りをオフセットとして用いて、後続する力センサ入力に基づいて力のグラムの数値を決定する。別の方法としては、システムにより、力センサからの読み取りが自動的にゼロ点補正されるよりはむしろ、それを「ゼロに戻す」ことを使用者が好むかを確認するための使用者入力を求めることも可能である。工程160において、プローブ32の遠位先端部34の少なくとも三次元空間座標及び好ましくは3つの配向度を提供するプローブ32上の位置センサ62から、位置データが入力される。次いで工程170で、後ほどの使用のために、この位置情報が、自動ゼロ点ゾーンの参照表内に格納される。
【0034】
工程180では、心臓内のプローブ及び他の医療処置が処置中に通常的に再位置決めされるように、プローブが再位置決めされる。工程190に示された本方法の別の実施形態では、プローブの位置が継続的に監視され、工程170で作成された表に格納されたゼロ点合わせゾーン位置のリストと比較される。工程190において、プローブがゼロ点合わせゾーン表内の位置と等価の位置にあることをプロセッサ40が決定する場合には、その位置での力信号は、ベースライン読み取りとしてとして再び使用され、すなわち、使用者に報告される力読取りは、プローブ32内の力センサからの力信号入力についてはゼロになるであろう。このようにして、力検出用プローブは、プローブの位置が格納されたゼロ点合わせゾーン位置のうちの1つに入るたび毎に、自動的に再較正されるであろう。
【0035】
工程190で、プローブがゼロ合わせゾーン表内の位置にない場合には、力センサからの信号は、工程130において検証データ及び/又は検証画像と一緒に入力され、更に工程140で、この組織接触検証照会が反復されるであろう。一旦組織接触が工程140において判定されれば、力センサ64からの情報が使用されて、操作者28により通常的にディスプレイ44上に表示される力読取りが決定されるであろう。力読取りは、通常グラムで表示されるが、測定値の他の単位で表示されてもよい。
【0036】
以下の特許請求の範囲における機能的要素に加えて、全ての手段又は工程の対応する構造、材料、作用及び等価物は、特許請求される他の要素と組み合わせて、その機能を実施するための任意の構造、材料、又は作用を、明確に特許請求されるものとして包含することを意図したものである。本開示の説明は、例示及び説明の目的で提示されているが、開示した形態における開示内容に対して網羅的又は限定的となることを意図したものではない。当業者には、本開示の範囲及び趣旨から逸脱することなく、多くの修正及び変更が明らかとなるであろう。その実施形態は、本開示の原理及び実際的な応用について最良に説明するため、並びに、当業者が、種々の修正形態を伴う各実施形態に関する開示内容を、企図される特定の用途に適するものとして理解できるようにするために、選択し説明したものである。
【0037】
上記に述べた実施形態は、一例として引用したものであって、本発明は上記に具体的に図示及び述べたものに限定されないことが認識されるであろう。むしろ本発明の範囲には、本明細書の上記の様々な特徴の組み合わせ及び準組み合わせの両方が含まれ、並びに、当業者が前述の説明を読むことによって見出され得る、既知の技術では開示されていないような変形及び修正も含まれる。
【0038】
〔実施の態様〕
(1) プローブの遠位端近辺に力センサを有する前記プローブを較正するための方法であって、
前記プローブを患者の体腔内に挿入させる工程と、
前記プローブの遠位端に加えられた力を示す前記力センサからの第1の信号を、信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部が前記患者の組織に接触していないことを検証する工程と、
前記力センサからの前記第1の信号をゼロ点の力読取りに設定するように、前記プロセッサを較正する工程とを含む、前記方法。
(2) 前記プローブの前記遠位先端部の位置を三次元空間で示す位置情報を、前記信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部の前記位置を自動ゼロ点ゾーンの位置として格納する工程とを更に含む、実施態様1に記載の方法。
(3) 前記プローブを、格納された自動ゼロ点ゾーン位置へと操作する工程と、
前記プローブの前記遠位端に加えられる力を示す前記力センサからの第2の信号を前記信号プロセッサで受け取る工程と、
前記力センサからの前記第2の信号をゼロ点の力読取りに設定するように、前記プロセッサを再較正する工程とを更に含む、実施態様2に記載の方法。
(4) 前記プローブの前記遠位先端部の位置を継続的に監視する工程と、
前記プローブの前記遠位端に加えられた力を示す前記力センサからの第2の信号を、前記信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部の前記位置が、自動ゼロ点ゾーン位置と等価である場合、前記力センサからの前記第2の信号をゼロ点の力読取りへと設定するように前記プロセッサを再較正する工程とを更に含む、実施態様2に記載の方法。
(5) 前記検証する工程が、前記プローブの前記遠位先端部が組織と接触していることを判定するために、心電図データ、電極インピーダンスデータ、蛍光透視撮像、リアルタイムMRI、リアルタイムCT又は電子解剖学的マッピングシステムの画像又はデータの中の少なくとも1つを使用することを含む、実施態様1に記載の方法。
(6) 前記カテーテルの前記遠位先端部に関する位置情報を受け取る前記工程が、前記位置センサの空間座標並びにピッチ、ロール及びヨーを受け取ることを含む、実施態様2に記載の方法。
(7) 前記プローブが心臓カテーテルを含む、実施態様1に記載の方法。
(8) 前記体腔が心腔を含む、実施態様1に記載の方法。
(9) 前記心臓カテーテルが、その先端部に電極を有するアブレーションカテーテルであり、前記先端部電極がまた、ECGデータ及び/又はインピーダンスデータを記録するために用いられ得る、実施態様7に記載の方法。
(10) 前記自動ゼロ点ゾーンが、電子解剖学的マッピングシステムからの再構成された組織形状を使用する単一ポイントから拡張され、検証かつ位置決めされた前記単一の自動ゼロ点ゾーン位置周辺の三次元自動ゼロ点ゾーンを決定する、実施態様2に記載の方法。
【0039】
(11) 力検出用プローブを再較正するためのシステムであって、
患者の体腔内に挿入されることが可能なプローブであって、力が経時的に変化するのに伴って前記プローブに加えられた前記力を示す複数の信号を経時的に提供する力センサを備える、プローブと、
前記プローブが前記患者の前記体腔内の組織と接触しているかどうかを判定するための手段と、
前記力を示す前記複数の信号を受け取るように構成され、かつ前記プローブ上の前記力を示す力読取りを発生するプロセッサとを含み、
前記プローブが接触状態にあるかどうかを判定するための前記手段が前記プローブと前記患者の前記体腔との間に接触がないことを判定する場合に、前記プロセッサが前記力読取りをゼロ点に設定する、前記システム。
(12) 前記システムが、三次元空間内での前記プローブの前記位置を示す複数の電気信号を前記プロセッサに提供することが可能な位置センサを更に含み、所定の位置において前記プローブと前記患者の前記体腔との間に接触がない場合に、前記プローブの前記位置が、自動ゼロ点ゾーンとしてメモリ内に格納される、実施態様11に記載のシステム。
(13) 前記プロセッサが、前記プローブの前記位置を監視し、かつ前記プローブが自動ゼロ点ゾーンとしてメモリ内に格納された位置にある場合に前記力読取りをゼロ点にリセットする、実施態様12に記載のシステム。
(14) 前記プローブが、電気生理学カテーテルである、実施態様11に記載のシステム。
(15) 前記電気生理学カテーテルが、前記カテーテルの前記遠位端上に搭載された少なくとも1つの電極を有する、実施態様14に記載のシステム。
(16) 前記カテーテルと前記患者の前記組織との間の接触を判定するための前記手段が、心電図及び/又は前記電極の少なくとも1つからのインピーダンス信号に基づいている、実施態様15に記載のシステム。
(17) 前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、蛍光透視画像である、実施態様11に記載のシステム。
(18) 前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、リアルタイムCT画像である、実施態様11に記載のシステム。
(19) 前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、リアルタイム磁気共鳴画像(MRI)である、実施態様11に記載のシステム。
(20) 前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、電子解剖学的マッピングシステムからのデータ及び/又は画像である、実施態様11に記載のシステム。
【0040】
(21) 前記自動ゼロ点合わせゾーン位置には前記位置情報が取得された心臓周期内のポイントに関する情報が格納されている、実施態様13に記載のシステム。
(22) 前記自動ゼロ点合わせゾーン位置には前記位置情報が取得された呼吸周期内のポイントに関する情報が格納されている、実施態様13に記載のシステム。
(23) 前記位置センサが、前記プローブの三次元位置座標と3つの配向度(ピッチ、ロール及びヨー)とを前記プロセッサに提供することが可能な磁気位置センサである、実施態様12に記載のシステム。
(24) 前記電子解剖学的マッピングシステムからのデータに基づく前記プローブと前記患者の前記組織との間の前記距離を使用して、組織接触があるかどうかを判定する、実施態様20に記載のシステム。
(25) 前記距離dが予め定められた閾値を超える場合に、自動的に、前記システムは組織接触がないと見なす、実施態様24に記載のシステム。
(26) 前記自動ゼロ点ゾーンが、電子解剖学的マッピングシステムから再構築された組織形状を使用する単一ポイントから拡張され、検証かつ位置決めされた前記単一の自動ゼロ点ゾーン位置周辺の三次元自動ゼロ点ゾーンを決定する、実施態様20に記載のシステム。
【特許請求の範囲】
【請求項1】
プローブの遠位端近辺に力センサを有する前記プローブを較正するための方法であって、
前記プローブを患者の体腔内に挿入させる工程と、
前記プローブの遠位端に加えられた力を示す前記力センサからの第1の信号を、信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部が前記患者の組織に接触していないことを検証する工程と、
前記力センサからの前記第1の信号をゼロ点の力読取りに設定するように、前記プロセッサを較正する工程とを含む、前記方法。
【請求項2】
前記プローブの前記遠位先端部の位置を三次元空間で示す位置情報を、前記信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部の前記位置を自動ゼロ点ゾーンの位置として格納する工程とを更に含む、請求項1に記載の方法。
【請求項3】
前記プローブを、格納された自動ゼロ点ゾーン位置へと操作する工程と、
前記プローブの前記遠位端に加えられる力を示す前記力センサからの第2の信号を前記信号プロセッサで受け取る工程と、
前記力センサからの前記第2の信号をゼロ点の力読取りに設定するように、前記プロセッサを再較正する工程とを更に含む、請求項2に記載の方法。
【請求項4】
前記プローブの前記遠位先端部の位置を継続的に監視する工程と、
前記プローブの前記遠位端に加えられた力を示す前記力センサからの第2の信号を、前記信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部の前記位置が、自動ゼロ点ゾーン位置と等価である場合、前記力センサからの前記第2の信号をゼロ点の力読取りへと設定するように前記プロセッサを再較正する工程とを更に含む、請求項2に記載の方法。
【請求項5】
前記検証する工程が、前記プローブの前記遠位先端部が組織と接触していることを判定するために、心電図データ、電極インピーダンスデータ、蛍光透視撮像、リアルタイムMRI、リアルタイムCT又は電子解剖学的マッピングシステムの画像又はデータの中の少なくとも1つを使用することを含む、請求項1に記載の方法。
【請求項6】
前記カテーテルの前記遠位先端部に関する位置情報を受け取る前記工程が、前記位置センサの空間座標並びにピッチ、ロール及びヨーを受け取ることを含む、請求項2に記載の方法。
【請求項7】
前記プローブが心臓カテーテルを含む、請求項1に記載の方法。
【請求項8】
前記体腔が心腔を含む、請求項1に記載の方法。
【請求項9】
前記心臓カテーテルが、その先端部に電極を有するアブレーションカテーテルであり、前記先端部電極がまた、ECGデータ及び/又はインピーダンスデータを記録するために用いられ得る、請求項7に記載の方法。
【請求項10】
前記自動ゼロ点ゾーンが、電子解剖学的マッピングシステムからの再構成された組織形状を使用する単一ポイントから拡張され、検証かつ位置決めされた前記単一の自動ゼロ点ゾーン位置周辺の三次元自動ゼロ点ゾーンを決定する、請求項2に記載の方法。
【請求項11】
力検出用プローブを再較正するためのシステムであって、
患者の体腔内に挿入されることが可能なプローブであって、力が経時的に変化するのに伴って前記プローブに加えられた前記力を示す複数の信号を経時的に提供する力センサを備える、プローブと、
前記プローブが前記患者の前記体腔内の組織と接触しているかどうかを判定するための手段と、
前記力を示す前記複数の信号を受け取るように構成され、かつ前記プローブ上の前記力を示す力読取りを発生するプロセッサとを含み、
前記プローブが接触状態にあるかどうかを判定するための前記手段が前記プローブと前記患者の前記体腔との間に接触がないことを判定する場合に、前記プロセッサが前記力読取りをゼロ点に設定する、前記システム。
【請求項12】
前記システムが、三次元空間内での前記プローブの前記位置を示す複数の電気信号を前記プロセッサに提供することが可能な位置センサを更に含み、所定の位置において前記プローブと前記患者の前記体腔との間に接触がない場合に、前記プローブの前記位置が、自動ゼロ点ゾーンとしてメモリ内に格納される、請求項11に記載のシステム。
【請求項13】
前記プロセッサが、前記プローブの前記位置を監視し、かつ前記プローブが自動ゼロ点ゾーンとしてメモリ内に格納された位置にある場合に前記力読取りをゼロ点にリセットする、請求項12に記載のシステム。
【請求項14】
前記プローブが、電気生理学カテーテルである、請求項11に記載のシステム。
【請求項15】
前記電気生理学カテーテルが、前記カテーテルの前記遠位端上に搭載された少なくとも1つの電極を有する、請求項14に記載のシステム。
【請求項16】
前記カテーテルと前記患者の前記組織との間の接触を判定するための前記手段が、心電図及び/又は前記電極の少なくとも1つからのインピーダンス信号に基づいている、請求項15に記載のシステム。
【請求項17】
前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、蛍光透視画像である、請求項11に記載のシステム。
【請求項18】
前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、リアルタイムCT画像である、請求項11に記載のシステム。
【請求項19】
前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、リアルタイム磁気共鳴画像(MRI)である、請求項11に記載のシステム。
【請求項20】
前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、電子解剖学的マッピングシステムからのデータ及び/又は画像である、請求項11に記載のシステム。
【請求項21】
前記自動ゼロ点合わせゾーン位置には前記位置情報が取得された心臓周期内のポイントに関する情報が格納されている、請求項13に記載のシステム。
【請求項22】
前記自動ゼロ点合わせゾーン位置には前記位置情報が取得された呼吸周期内のポイントに関する情報が格納されている、請求項13に記載のシステム。
【請求項23】
前記位置センサが、前記プローブの三次元位置座標と3つの配向度(ピッチ、ロール及びヨー)とを前記プロセッサに提供することが可能な磁気位置センサである、請求項12に記載のシステム。
【請求項24】
前記電子解剖学的マッピングシステムからのデータに基づく前記プローブと前記患者の前記組織との間の前記距離を使用して、組織接触があるかどうかを判定する、請求項20に記載のシステム。
【請求項25】
前記距離dが予め定められた閾値を超える場合に、自動的に、前記システムは組織接触がないと見なす、請求項24に記載のシステム。
【請求項26】
前記自動ゼロ点ゾーンが、電子解剖学的マッピングシステムから再構築された組織形状を使用する単一ポイントから拡張され、検証かつ位置決めされた前記単一の自動ゼロ点ゾーン位置周辺の三次元自動ゼロ点ゾーンを決定する、請求項20に記載のシステム。
【請求項1】
プローブの遠位端近辺に力センサを有する前記プローブを較正するための方法であって、
前記プローブを患者の体腔内に挿入させる工程と、
前記プローブの遠位端に加えられた力を示す前記力センサからの第1の信号を、信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部が前記患者の組織に接触していないことを検証する工程と、
前記力センサからの前記第1の信号をゼロ点の力読取りに設定するように、前記プロセッサを較正する工程とを含む、前記方法。
【請求項2】
前記プローブの前記遠位先端部の位置を三次元空間で示す位置情報を、前記信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部の前記位置を自動ゼロ点ゾーンの位置として格納する工程とを更に含む、請求項1に記載の方法。
【請求項3】
前記プローブを、格納された自動ゼロ点ゾーン位置へと操作する工程と、
前記プローブの前記遠位端に加えられる力を示す前記力センサからの第2の信号を前記信号プロセッサで受け取る工程と、
前記力センサからの前記第2の信号をゼロ点の力読取りに設定するように、前記プロセッサを再較正する工程とを更に含む、請求項2に記載の方法。
【請求項4】
前記プローブの前記遠位先端部の位置を継続的に監視する工程と、
前記プローブの前記遠位端に加えられた力を示す前記力センサからの第2の信号を、前記信号プロセッサにて受け取る工程と、
前記プローブの前記遠位先端部の前記位置が、自動ゼロ点ゾーン位置と等価である場合、前記力センサからの前記第2の信号をゼロ点の力読取りへと設定するように前記プロセッサを再較正する工程とを更に含む、請求項2に記載の方法。
【請求項5】
前記検証する工程が、前記プローブの前記遠位先端部が組織と接触していることを判定するために、心電図データ、電極インピーダンスデータ、蛍光透視撮像、リアルタイムMRI、リアルタイムCT又は電子解剖学的マッピングシステムの画像又はデータの中の少なくとも1つを使用することを含む、請求項1に記載の方法。
【請求項6】
前記カテーテルの前記遠位先端部に関する位置情報を受け取る前記工程が、前記位置センサの空間座標並びにピッチ、ロール及びヨーを受け取ることを含む、請求項2に記載の方法。
【請求項7】
前記プローブが心臓カテーテルを含む、請求項1に記載の方法。
【請求項8】
前記体腔が心腔を含む、請求項1に記載の方法。
【請求項9】
前記心臓カテーテルが、その先端部に電極を有するアブレーションカテーテルであり、前記先端部電極がまた、ECGデータ及び/又はインピーダンスデータを記録するために用いられ得る、請求項7に記載の方法。
【請求項10】
前記自動ゼロ点ゾーンが、電子解剖学的マッピングシステムからの再構成された組織形状を使用する単一ポイントから拡張され、検証かつ位置決めされた前記単一の自動ゼロ点ゾーン位置周辺の三次元自動ゼロ点ゾーンを決定する、請求項2に記載の方法。
【請求項11】
力検出用プローブを再較正するためのシステムであって、
患者の体腔内に挿入されることが可能なプローブであって、力が経時的に変化するのに伴って前記プローブに加えられた前記力を示す複数の信号を経時的に提供する力センサを備える、プローブと、
前記プローブが前記患者の前記体腔内の組織と接触しているかどうかを判定するための手段と、
前記力を示す前記複数の信号を受け取るように構成され、かつ前記プローブ上の前記力を示す力読取りを発生するプロセッサとを含み、
前記プローブが接触状態にあるかどうかを判定するための前記手段が前記プローブと前記患者の前記体腔との間に接触がないことを判定する場合に、前記プロセッサが前記力読取りをゼロ点に設定する、前記システム。
【請求項12】
前記システムが、三次元空間内での前記プローブの前記位置を示す複数の電気信号を前記プロセッサに提供することが可能な位置センサを更に含み、所定の位置において前記プローブと前記患者の前記体腔との間に接触がない場合に、前記プローブの前記位置が、自動ゼロ点ゾーンとしてメモリ内に格納される、請求項11に記載のシステム。
【請求項13】
前記プロセッサが、前記プローブの前記位置を監視し、かつ前記プローブが自動ゼロ点ゾーンとしてメモリ内に格納された位置にある場合に前記力読取りをゼロ点にリセットする、請求項12に記載のシステム。
【請求項14】
前記プローブが、電気生理学カテーテルである、請求項11に記載のシステム。
【請求項15】
前記電気生理学カテーテルが、前記カテーテルの前記遠位端上に搭載された少なくとも1つの電極を有する、請求項14に記載のシステム。
【請求項16】
前記カテーテルと前記患者の前記組織との間の接触を判定するための前記手段が、心電図及び/又は前記電極の少なくとも1つからのインピーダンス信号に基づいている、請求項15に記載のシステム。
【請求項17】
前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、蛍光透視画像である、請求項11に記載のシステム。
【請求項18】
前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、リアルタイムCT画像である、請求項11に記載のシステム。
【請求項19】
前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、リアルタイム磁気共鳴画像(MRI)である、請求項11に記載のシステム。
【請求項20】
前記プローブと前記患者の前記組織との間の接触を判定するための前記手段が、電子解剖学的マッピングシステムからのデータ及び/又は画像である、請求項11に記載のシステム。
【請求項21】
前記自動ゼロ点合わせゾーン位置には前記位置情報が取得された心臓周期内のポイントに関する情報が格納されている、請求項13に記載のシステム。
【請求項22】
前記自動ゼロ点合わせゾーン位置には前記位置情報が取得された呼吸周期内のポイントに関する情報が格納されている、請求項13に記載のシステム。
【請求項23】
前記位置センサが、前記プローブの三次元位置座標と3つの配向度(ピッチ、ロール及びヨー)とを前記プロセッサに提供することが可能な磁気位置センサである、請求項12に記載のシステム。
【請求項24】
前記電子解剖学的マッピングシステムからのデータに基づく前記プローブと前記患者の前記組織との間の前記距離を使用して、組織接触があるかどうかを判定する、請求項20に記載のシステム。
【請求項25】
前記距離dが予め定められた閾値を超える場合に、自動的に、前記システムは組織接触がないと見なす、請求項24に記載のシステム。
【請求項26】
前記自動ゼロ点ゾーンが、電子解剖学的マッピングシステムから再構築された組織形状を使用する単一ポイントから拡張され、検証かつ位置決めされた前記単一の自動ゼロ点ゾーン位置周辺の三次元自動ゼロ点ゾーンを決定する、請求項20に記載のシステム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−78582(P2013−78582A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−216130(P2012−216130)
【出願日】平成24年9月28日(2012.9.28)
【出願人】(511099630)バイオセンス・ウエブスター・(イスラエル)・リミテッド (50)
【氏名又は名称原語表記】Biosense Webster (Israel), Ltd.
【住所又は居所原語表記】4 Hatnufa Street, Yokneam 20692, Israel
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2012−216130(P2012−216130)
【出願日】平成24年9月28日(2012.9.28)
【出願人】(511099630)バイオセンス・ウエブスター・(イスラエル)・リミテッド (50)
【氏名又は名称原語表記】Biosense Webster (Israel), Ltd.
【住所又は居所原語表記】4 Hatnufa Street, Yokneam 20692, Israel
【Fターム(参考)】
[ Back to top ]