
自動倉庫
【課題】ラックの構造に制約を受けることなく荷の両側面を挟持することによる移載を可能とし、同時に、自動倉庫全体における収容可能な荷の総量を増やす。
【解決手段】制御装置の指令に基づき、移載装置10がラックと荷台間での荷の移載を行うとともに、荷台が複数段のラック間に形成された走行路を走行できるようになっている自動倉庫であって、移載装置10が前後および左右方向に移動可能な左右一対のアーム部材20,21を備え、このアーム部材20,21は、両アーム部材20,21の幅が荷の幅寸法以下になるように移動された状態で荷を係止できる係止手段と、両アーム部材20,21の幅が広がるように移動された状態から荷の左右側面を挟持できる挟持手段とを有する。
【解決手段】制御装置の指令に基づき、移載装置10がラックと荷台間での荷の移載を行うとともに、荷台が複数段のラック間に形成された走行路を走行できるようになっている自動倉庫であって、移載装置10が前後および左右方向に移動可能な左右一対のアーム部材20,21を備え、このアーム部材20,21は、両アーム部材20,21の幅が荷の幅寸法以下になるように移動された状態で荷を係止できる係止手段と、両アーム部材20,21の幅が広がるように移動された状態から荷の左右側面を挟持できる挟持手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、立体倉庫の荷収納区画に収容されている複数の荷の中から、目的の荷物が含まれている荷を取り出して所定位置に搬送するとともに、荷を立体倉庫の荷収納区画に搬送して返却できるようにした自動倉庫に関する。
【背景技術】
【0002】
従来、スタッカクレーンなどにより荷の入出庫を行う自動倉庫において、荷を立体倉庫の荷収納区画からスタッカクレーンの荷台上の所定位置に正確に引き込み、かつ荷を立体倉庫の荷収納区画に正確に返却する目的で、たとえば先行技術文献1に記載されるような荷収納区画の荷を、チャックを備えた左右一対のスライドフォークを用いて荷の両側面を挟持して移動させる方式が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−52064号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
すなわち、この先行技術(特許文献1)に記載の自動倉庫は、移載対象物品としてのバケット(荷)をラックからスタッカクレーンの昇降台に移載、もしくは昇降台からラックへ戻す手段を備えており、この昇降台にチャックを備えた左右一対のスライドフォークが設けられている。バケット(荷)は、ラックの支柱の手前にバケット(荷)の先端が来るように配置され、チャックをラックの支柱の手前まで移動させることにより、一対のチャックがバケット(荷)をチャックし、昇降台にバケット(荷)を移載できるようになっている。このため支柱の手前までチャックを前進させることができればよいため、支柱の幅の内側にチャックの通過スペースを別途用意する必要がなく、ラック側の収容効率を向上させることになる。
【0005】
しかし、この移載装置にあっては、ラック側の収容効率を向上させることにはなるものの、ラック棚面の先端が支柱の前に張り出す構造を用いなければならず、またラック棚面の先端が支柱の前に張り出さない構造にするには、バケット(荷)の一部をラック棚面の先端から常に張り出すようにセットしなければならず、いずれにしても自動倉庫の構造において種々の制約を受けることになる。またラックの奥行きを充分に利用できないといった問題もある。
【0006】
本発明は、このような問題点に着目してなされたもので、ラックの構造に制約を受けることなく荷の両側面を挟持することによる移載を可能とし、同時に、自動倉庫全体における収容可能な荷の総量を増やすことを目的とする。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明の自動倉庫は、
制御装置の指令に基づき、移載装置がラックと荷台間での荷の移載を行うとともに、該荷台が複数段のラック間に形成された走行路を走行できるようになっている自動倉庫であって、
前記移載装置が、前後および左右方向に移動可能な左右一対のアーム部材を備え、左右一対の前記アーム部材は、両アーム部材の幅が荷の幅寸法以下になるように移動された状態で前記荷を係止できる係止手段と、両アーム部材の幅が広がるように移動された状態から荷の左右側面を挟持できる挟持手段と、を有することを特徴としている。
この特徴によれば、移載装置によって荷を引き出す際において、荷とラックの支柱における左右の隙間が狭く設定されている場合でも、荷同士が近接している場合でも、両アーム部材の幅を荷の幅寸法以下に移動させることにより、前記アーム部材は荷に容易にアクセス可能となる。したがって前記アーム部材を用いて荷をその両側面が支柱等によって邪魔されない所定位置に係止手段によって引き出すことができる。次に荷の左右側面を挟持された状態で荷が引き出されるため、自動倉庫全体における収容可能な荷の総量を増やすために設計されたラックの構造に制約を受けることなく荷の両側面を挟持する荷の移載が可能となる。
【0008】
本発明の自動倉庫は、
前記アーム部材は、荷台の走行時においてはラック間に形成された走行路の幅内に収納され、荷の移載時において荷台に設けられた駆動手段により走行路を挟んで対向する両ラックに対して前後に移動自在に配置され、前記ラック間に形成された走行路を挟んだ両ラックの荷に対してアクセス可能になるように前記係止手段と前記挟持手段とを有していることを特徴としている。
この特徴によれば、左右一対のアーム部材は、荷台の走行時においてはラック間に形成された走行路の幅内に収納され、荷の移載時において荷台に設けられた駆動手段により走行路を挟んで対向する両ラックに対して前後に移動自在となるため、コンパクトな左右一対のアーム部材のみで走行路を挟んだ両ラックの荷に対する移載処理が可能となる。
【0009】
本発明の自動倉庫は、
前記アーム部材は、前後および左右方向に移動可能な立設状態の平板状部材からなり、平板状部材の先頭部分に前記係止手段が設けられていることを特徴としている。
この特徴によれば、前記アーム部材を前後に移動させてもその形状が立設状態(上下の長さが横幅より大)の平板状部材であるため、前後方向に移動させても撓みが少なく、係止手段の送り出し位置を安定させることができるばかりか、挟持位置も安定して確保できる。また、荷の移動時におけるアーム部材の撓みも少なくできる。
【0010】
本発明の自動倉庫は、
前記アーム部材は、多段的に立設した複数の立設状態の平板状部材からなり、これら平板状部材が互いに相対移動可能に駆動され、伸縮自在になっていることを特徴としている。
この特徴によれば、多段的に伸縮する立設した複数の平板状部材が多段的に伸縮することによって、アーム部材の到達可能距離を伸ばすことができ、ラックの奥に収納されている荷の取り出しと収納を容易に行うことができる。
【0011】
本発明の自動倉庫は、
前記荷の左右側面に係合凹部が形成されるとともに、前記アーム部材の先頭に位置する平板状部材に前記係合凹部に係合する係合片が形成されていることを特徴としている。
この特徴によれば、荷自体に設けられた係合凹部に挟持移動体の係合片を係合させることによって荷の移動を行うことができるので、挟持移動に必要な摩擦力を持つ部材が必要ないことになる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施例における入庫方法が適用される自動倉庫の側面図である。
【図2】同じく実施例における入庫方法が適用される自動倉庫の平面図である。
【図3】入出庫ステーションを介してスタッカクレーンにより荷の出し入れが行われる自動倉庫の部分斜視図である。
【図4】スタッカクレーンとラック棚面に載置された荷との関係を示す部分平面図である。
【図5】スタッカクレーンの詳細説明図である。
【図6】入荷された荷の受け入れから自動倉庫への入庫するまでのシステム構成図である。
【図7】移載装置アーム部分を示す側断面図である。
【図8】移載装置アーム部分を示す横断面図である。
【図9】移載装置の幅方向への動きを示す上面説明図である。
【図10】移載方法を説明する斜視概略図である。
【図11】移載方法における荷の取り出しを説明する上面概略図である。
【図12】移載方法における荷の取り出しを説明する上面概略図である。
【図13】移載方法における荷の取り出しを説明する上面概略図である。
【図14】移載方法における荷の収納を説明する上面概略図である。
【図15】移載方法における荷の収納を説明する上面概略図である。
【発明を実施するための形態】
【0013】
本発明に係る自動倉庫を実施するための形態を実施例に基づいて以下に説明する。
【実施例】
【0014】
本発明の実施例を図面に基づいて説明すると、先ず図1には、本発明の実施例としての自動立体倉庫1が示されており、この自動立体倉庫(以下自動倉庫1と称する)は、複数の荷65を4基の同一構成のスタッカクレーン2a,2b,2c,2dにより自動的に出し入れ自在に収納保管する倉庫であって、この自動倉庫1は4基のスタッカクレーン2a,2b,2c,2dを挟んでそれらの両側には、ラック4a,4b及び5a,5bないし6a,6bそして7a,7bが互いに向き合って配設され、これらの互いに向き合うラック4a,4b及び5a,5bないし6a,6bそして7a,7bはそれぞれブロック単位で構成され、それぞれを収納棚ブロック4,5,6,7と称し、前後に延設した高層構造物として構築されている(図2参照)。なお各ラック4a,4b及び5a,5bないし6a,6bそして7a,7bは、前後方向に複数の荷65(ここでは2個)を並べて配置可能に奥行きを備えている。
【0015】
これら収納棚ブロック4,5,6,7の一端入口側には、それぞれ荷65の入、出庫を行う入出庫ステーションが設けられ、これら入出庫ステーションには、図6に示されるように、ホストコンピュータMCの指令に基づいて作動するシステムコントローラSC1、SC2、SC3が配設されている。また、この入出庫ステーションには、入、出荷される荷65の搬出入を行う搬送装置8から分岐された分岐搬送装置8a,8b,8cが近傍位置まで配置されている。
【0016】
一方、4基のスタッカクレーン2a,2b,2c,2dは、システムコントローラSC1,SC2,SC3からの指令によりラック4aと4b,5aと5b,6aと6b及び7aと7bのそれぞれ相対する前面を横切る方向に走行し、前後並びに上下方向に最短距離で自動走行し、位置決め停止した後、荷の出し入れを行う。
【0017】
次に、スタッカクレーン2aに基づき図3〜図5を参照して詳述する。このスタッカクレーン2aは、収納棚ブロック4のラック4a,4b専用に使用されるもので、システムコントローラSC1からの指令に基づいて移動制御されるようになっており、対面するラック4a,4b間の床面に設置された1本のレールR上を例えばインバータモータ等の図示しない駆動装置により自動走行する走行台車14と、この走行台車14の前後に立設した一対のマスト15a,15bと、ラック4a,4bに対し荷の出し入れを行うアーム部材20、21と荷台(基台50と載置台19)とからなる、これらマスト15a,15bに対し上下方向に移動停止し移載装置10とで構成されている。
【0018】
図5に示すように、この移載装置10は、インバータモータ等の駆動装置により昇降可能に案内支持された支持体16a,16bと、これら支持体16a,16b間に水平に支持された基台50と、この基台50上面の両側に並設され、スタッカクレーン2aの移動方向に対し直交するように、両側の対向するラック4a,4bに向けて前後に移動可能、且つ左右方向にも同時に移動可能な挟持腕となる板状のアーム部材20、21と、から構成されている。
【0019】
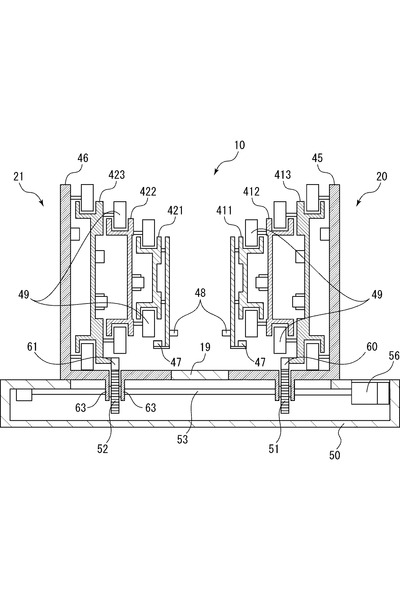
次に図7から図10には移載装置10の構造が開示されている。移載装置10は前後および左右方向に移動可能な左右一対のアーム部材20、21を備えており、このアーム部材20、21は、多段的に立設した複数の立設状態の平板状部材(411,412,413,421,422,423)と、外枠45、46とからなる。これら平板状部材は互いに、かつ外枠45、46に対して長手方向にそれぞれ相対移動可能に配置されている。外枠45、46は基台50に対して左右に移動可能にその基台50に設置されており、最も外側に位置する平板状部材(413,423)が回転遊嵌部材57によって外枠45、46に対して前後に移動可能に案内保持されている。
【0020】
また同じように、最も外側に位置する平板状部材(413,423)に設けられている回転遊嵌部材57によって、1つ内側に位置する平板状部材(412,422)が前後に移動可能に案内保持されている。同じく更に内側に位置する平板状部材(412,422)に設けられている回転遊嵌部材57によって、最も内側に位置する平板状部材(411,421)が前後に移動可能に案内保持されている(図7、8参照)。更に、平板状部材(411,412,413,421,422,423)の前後相対移動を滑らかにするために、移動誘導体49が設けられている。このように、アーム部材20、21を前後に移動させてもその形状が立設状態(上下の長さが横幅より大)の平板状部材(411,412,413,421,422,423)の組み合わせであるため、前後方向に移動させても全体的に撓みが少ない。
【0021】
56は基台50に設置された駆動装置であり、駆動装置56から延びる棒状部材53にラチェット51、52がスプライン結合されており、これらラチェット51、52は、外枠45、46から垂下した案内片63で左右の移動が規制され、外枠45、46と同期して動くようになっている。またラチェット51、52は、それぞれ最も外側に位置する平板状部材413、423の底部に設けられた平ギア60、61に噛合されている。そのため、外枠45、46に対して左右に相対移動しない平ギア60、61とラチェット51、52は常時噛合状態が維持されている。ラチェット51、52は、棒状部材53によってスプライン結合されているため、この駆動装置56の回動による棒状部材53の回転力で、ラチェット51、52に噛合された平ギア60、61が同時に前後移動されることになる。
【0022】
また、平板状部材(411,412,421,422)は、ここでは図示しないチェーンとラチェットによって、前記駆動装置56の動力による最も外側に位置する平板状部材413、423の前後移動に追従するようになっている。ここで前記チェーンと前記ラチェットの組み合わせによって平板状部材(411,412,413,421,422,423)は、内側に設置されている平板状部材ほど移動距離が長くなるようになっている。
【0023】
なお、この実施例においては、アーム部材20、21を前後に移動させてもその形状が立設状態(上下の長さが横幅より大)の平板状部材(411,412,413,421,422,423)の組み合わせであるため、前後方向に移動させても全体的に撓みが少ない。そのため、後述するアーム部材20、21先端に設けられる係止手段を構成する係止片47の送り出し位置を安定させることができるばかりか、挟持位置も安定して確保できる。また、荷の移動時におけるアーム部材の撓みも少なくできる。
【0024】
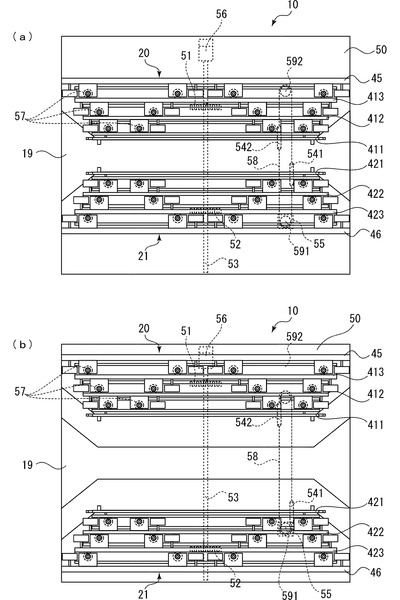
また、図9(a)に示すように、外枠45、46には固定部541、542によってラチェット591、592を軸として回転する無端チェーン58が固定され、図7及び図9に示される駆動部55の回転により外枠45、46が相対的に左右に移動可能になっている。さらに、前述したようにラチェット51、52は棒状部材53にスプライン結合されており、これらラチェット51、52は外枠45、46と同期して棒状部材53に沿って自由に動けるようになっている。さらに平板状部材(411,412,413,421,422,423)は、外枠45、46に対して前後の相対移動は許容されているものの、左右移動は規制されている。
【0025】
このように、移動可能な左右一対のアーム部材20、21が、左右方向に移動可能になっているため、荷65を左右方向から挟持できる挟持手段となり、かつアーム部材20、21を長手方向に対して移動可能になっているため、これら動きを荷65の移載処理に利用できる。
【0026】
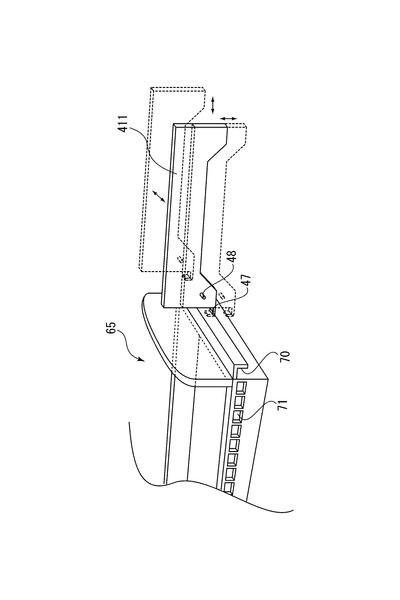
前記したように、マスト15a,15bに対し移載装置10が上下方向に移動可能になっており、図10に示すように、最も内側に位置する平板状部材(411,421)には係止手段を構成する係止片47が設けられており、さらに、荷65には係止部70が設けられている。したがって、平板状部材(411,421)の係止片47を荷65の正面部分に近接させ、移載装置10を上方に移動させることで係止片47を係止部70に係止できるようになっている。また、最も内側に位置する平板状部材(411,421)には側面係合片48が設けられており、荷65の外側面には係合凹部71が設けられているため、平板状部材(411,421)の側面係合片48を荷65の側部に近接させ、挟持する方向に移動させることにより、側面係合片48を荷65の係合凹部71に係合できるようになっている。
【0027】
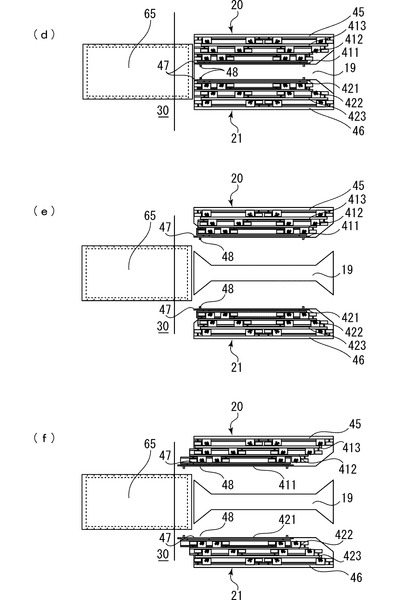
次に、荷の移載処理の実施例を図11から図13を使って説明する。まず、図11(a)において、ここでは図示しない駆動装置56の駆動で、最も外側に位置する平板状部材(413,423)が長手方向(荷65方向)に移動を始めると、その動きに従動して平板状部材(411,412,421,422)が移動する。そして、図11(b)に示されるように、荷65の係止部70の直下に平板状部材(411,421)に設けられた係止手段を構成する係止片47が到達したところで長手方向(荷65方向)移動が停止され、スタッカクレーン自体の上下移動によって係止手段を構成する係止片47が荷65の係止部70に係止される。この状態から駆動装置56の駆動の駆動で平板状部材(411,412,413,421,422,423)が長手方向(載置台19方向)に移動が開始され、荷65の左右側面を挟持手段できる位置まで引き出される(図11(c)参照)。そして、スタッカクレーン自体の上下移動によって係止手段を構成する係止片47が荷65の係止部70から外される(図12(d)参照)。
【0028】
次に、図12(e)に示すように、図7に示される駆動装置55の動きでアーム部材20,21が、荷65を挟持可能な幅まで広がるように左右に移動される。次に図7に示される駆動装置56によって、荷65を挟持できるだけの距離、平板状部材(411,412,413,421,422,423)が長手方向に移動される(図12(f)参照)。
【0029】
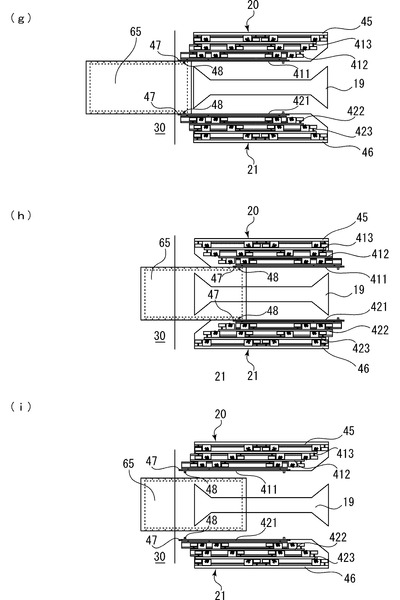
そして、図13(g)に示すように、アーム部材20,21が、荷65を挟持可能な幅まで狭まるように左右に移動され、最も内側に位置する平板状部材(411,421)に設けられた側面係合片48が、荷65の外側面に設けられた係合凹部71に係合されるとともに、平板状部材(411,412,413,421,422,423)の長手方向の移動によって荷65が載置台19方向に移動される(図13(h)参照)。さらにアーム部材20,21の荷65を挟持可能な幅まで広がる左右の移動によって側面係合片48の係合の解除し(図13(i)参照)、再度、平板状部材(411,421)に設けられた側面係合片48を荷65の外側面に設けられた更に奥側の係合凹部71に係合させ、図13(h)のような平板状部材(411,412,413,421,422,423)の載置台19方向への移動工程を繰り返すことにより、荷65の載置台19への移載が完了することになる。
【0030】
前述の実施例は、図4に示すように、ラック4aの荷65を載置台19に移す工程を示しているが、この平板状部材(411,412,413,421,422,423)は、逆の方向にも前後に移動可能になっており、ラック間(例えば図1,2に示される4aと4b間)に形成された走行路を挟んだ反対側のラック4bの荷65に対しての移動工程が可能になっている。
【0031】
図4に示すように、各ラック4a,4b及び5a,5bないし6a,6bそして7a,7bは、前後方向に複数の荷(ここでは2個)を並べて配置可能に奥行きを備えており、ラック内の奥に収納されている荷65を取り出す際には、アーム部材20,21をさらに後述する図16(i)に示される位置まで移動させることで、平板状部材(411,421)に設けられた係止手段を構成する係止片47を荷65の係止部60に係止させ、図11(b)で示される位置まで荷65を移動させ、前述の図11(c)、図12(d)(e)(f)、図13(g)(h)(i)の移動工程を実施することにより、ラック内の奥に収納されている荷65を載置台19に移載できる。
【0032】
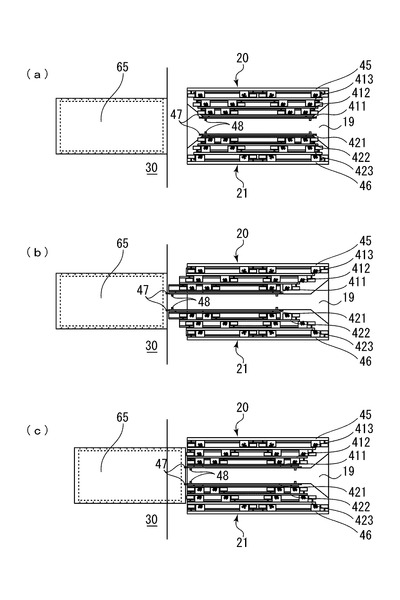
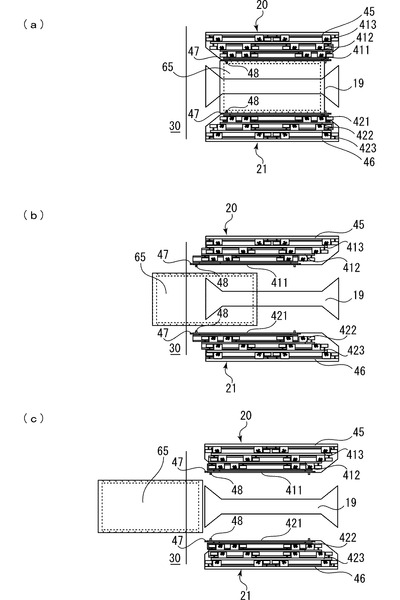
次に、荷の移載処理の実施例を図14から図15を使って説明する。まず、図14(a)において、アーム部材20,21が、荷65を挟持可能な幅まで狭まるように左右に移動され、最も内側に位置する平板状部材(411,421)に設けられた側面係合片48が、荷65の外側面に設けられた係合凹部71に係合されるとともに、平板状部材(411,412,413,421,422,423)の長手方向の移動によって荷65がラック棚面30方向に移動される(図14(b)参照)。さらにアーム部材20,21の荷65を挟持可能な幅まで広がる左右の移動によって側面係合片48の係合の解除し(図14(c)参照)、再度、平板状部材(411,421)に設けられた側面係合片48を荷65の外側面に設けられた更に手前側の係合凹部71に係合させ、平板状部材(411,412,413,421,422,423)のラック棚面30方向への移動工程を繰り返す。
【0033】
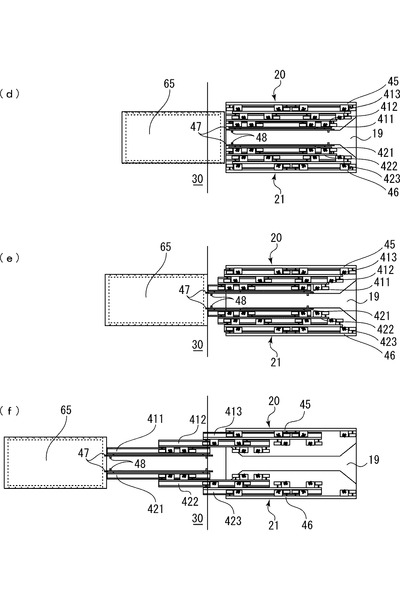
そして、所定位置まで荷65が仮収納された状態で、側面係合片48の係合が解除される(図14(c)参照)。次に、アーム部材20,21の最も内側に位置する平板状部材(411,421)からなる幅が荷の幅寸法以下になるように左右一対のアーム部材20,21が移動され(図15(d)参照)、アーム部材20,21を荷65の方向へ移動させ、前記荷をラック内に更に押し込むようにして収納を完了する(図15(e)参照)。この時、ラック内の奥に荷65を収納する場合は、さらにアーム部材を荷65の方向へ移動させることで収納を完了する(図15(f)参照)。
【符号の説明】
【0034】
1 自動倉庫
2 スタッカクレーン
10 移載装置
19 載置台
20,21 アーム部材
30 ラック棚面
411,412 平板状部材
413 平板状部材
421,422 平板状部材
423 平板状部材
45、46 外枠
47 係止片(係止手段)
48 側面係合片
49 移動誘導体
50 基台
51,52 ラチェット
541、542 固定部
55、56 駆動装置
58 無端チェーン
65 荷
70 係止部
71 係合凹部
SC システムコントローラ
【技術分野】
【0001】
本発明は、立体倉庫の荷収納区画に収容されている複数の荷の中から、目的の荷物が含まれている荷を取り出して所定位置に搬送するとともに、荷を立体倉庫の荷収納区画に搬送して返却できるようにした自動倉庫に関する。
【背景技術】
【0002】
従来、スタッカクレーンなどにより荷の入出庫を行う自動倉庫において、荷を立体倉庫の荷収納区画からスタッカクレーンの荷台上の所定位置に正確に引き込み、かつ荷を立体倉庫の荷収納区画に正確に返却する目的で、たとえば先行技術文献1に記載されるような荷収納区画の荷を、チャックを備えた左右一対のスライドフォークを用いて荷の両側面を挟持して移動させる方式が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−52064号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
すなわち、この先行技術(特許文献1)に記載の自動倉庫は、移載対象物品としてのバケット(荷)をラックからスタッカクレーンの昇降台に移載、もしくは昇降台からラックへ戻す手段を備えており、この昇降台にチャックを備えた左右一対のスライドフォークが設けられている。バケット(荷)は、ラックの支柱の手前にバケット(荷)の先端が来るように配置され、チャックをラックの支柱の手前まで移動させることにより、一対のチャックがバケット(荷)をチャックし、昇降台にバケット(荷)を移載できるようになっている。このため支柱の手前までチャックを前進させることができればよいため、支柱の幅の内側にチャックの通過スペースを別途用意する必要がなく、ラック側の収容効率を向上させることになる。
【0005】
しかし、この移載装置にあっては、ラック側の収容効率を向上させることにはなるものの、ラック棚面の先端が支柱の前に張り出す構造を用いなければならず、またラック棚面の先端が支柱の前に張り出さない構造にするには、バケット(荷)の一部をラック棚面の先端から常に張り出すようにセットしなければならず、いずれにしても自動倉庫の構造において種々の制約を受けることになる。またラックの奥行きを充分に利用できないといった問題もある。
【0006】
本発明は、このような問題点に着目してなされたもので、ラックの構造に制約を受けることなく荷の両側面を挟持することによる移載を可能とし、同時に、自動倉庫全体における収容可能な荷の総量を増やすことを目的とする。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明の自動倉庫は、
制御装置の指令に基づき、移載装置がラックと荷台間での荷の移載を行うとともに、該荷台が複数段のラック間に形成された走行路を走行できるようになっている自動倉庫であって、
前記移載装置が、前後および左右方向に移動可能な左右一対のアーム部材を備え、左右一対の前記アーム部材は、両アーム部材の幅が荷の幅寸法以下になるように移動された状態で前記荷を係止できる係止手段と、両アーム部材の幅が広がるように移動された状態から荷の左右側面を挟持できる挟持手段と、を有することを特徴としている。
この特徴によれば、移載装置によって荷を引き出す際において、荷とラックの支柱における左右の隙間が狭く設定されている場合でも、荷同士が近接している場合でも、両アーム部材の幅を荷の幅寸法以下に移動させることにより、前記アーム部材は荷に容易にアクセス可能となる。したがって前記アーム部材を用いて荷をその両側面が支柱等によって邪魔されない所定位置に係止手段によって引き出すことができる。次に荷の左右側面を挟持された状態で荷が引き出されるため、自動倉庫全体における収容可能な荷の総量を増やすために設計されたラックの構造に制約を受けることなく荷の両側面を挟持する荷の移載が可能となる。
【0008】
本発明の自動倉庫は、
前記アーム部材は、荷台の走行時においてはラック間に形成された走行路の幅内に収納され、荷の移載時において荷台に設けられた駆動手段により走行路を挟んで対向する両ラックに対して前後に移動自在に配置され、前記ラック間に形成された走行路を挟んだ両ラックの荷に対してアクセス可能になるように前記係止手段と前記挟持手段とを有していることを特徴としている。
この特徴によれば、左右一対のアーム部材は、荷台の走行時においてはラック間に形成された走行路の幅内に収納され、荷の移載時において荷台に設けられた駆動手段により走行路を挟んで対向する両ラックに対して前後に移動自在となるため、コンパクトな左右一対のアーム部材のみで走行路を挟んだ両ラックの荷に対する移載処理が可能となる。
【0009】
本発明の自動倉庫は、
前記アーム部材は、前後および左右方向に移動可能な立設状態の平板状部材からなり、平板状部材の先頭部分に前記係止手段が設けられていることを特徴としている。
この特徴によれば、前記アーム部材を前後に移動させてもその形状が立設状態(上下の長さが横幅より大)の平板状部材であるため、前後方向に移動させても撓みが少なく、係止手段の送り出し位置を安定させることができるばかりか、挟持位置も安定して確保できる。また、荷の移動時におけるアーム部材の撓みも少なくできる。
【0010】
本発明の自動倉庫は、
前記アーム部材は、多段的に立設した複数の立設状態の平板状部材からなり、これら平板状部材が互いに相対移動可能に駆動され、伸縮自在になっていることを特徴としている。
この特徴によれば、多段的に伸縮する立設した複数の平板状部材が多段的に伸縮することによって、アーム部材の到達可能距離を伸ばすことができ、ラックの奥に収納されている荷の取り出しと収納を容易に行うことができる。
【0011】
本発明の自動倉庫は、
前記荷の左右側面に係合凹部が形成されるとともに、前記アーム部材の先頭に位置する平板状部材に前記係合凹部に係合する係合片が形成されていることを特徴としている。
この特徴によれば、荷自体に設けられた係合凹部に挟持移動体の係合片を係合させることによって荷の移動を行うことができるので、挟持移動に必要な摩擦力を持つ部材が必要ないことになる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施例における入庫方法が適用される自動倉庫の側面図である。
【図2】同じく実施例における入庫方法が適用される自動倉庫の平面図である。
【図3】入出庫ステーションを介してスタッカクレーンにより荷の出し入れが行われる自動倉庫の部分斜視図である。
【図4】スタッカクレーンとラック棚面に載置された荷との関係を示す部分平面図である。
【図5】スタッカクレーンの詳細説明図である。
【図6】入荷された荷の受け入れから自動倉庫への入庫するまでのシステム構成図である。
【図7】移載装置アーム部分を示す側断面図である。
【図8】移載装置アーム部分を示す横断面図である。
【図9】移載装置の幅方向への動きを示す上面説明図である。
【図10】移載方法を説明する斜視概略図である。
【図11】移載方法における荷の取り出しを説明する上面概略図である。
【図12】移載方法における荷の取り出しを説明する上面概略図である。
【図13】移載方法における荷の取り出しを説明する上面概略図である。
【図14】移載方法における荷の収納を説明する上面概略図である。
【図15】移載方法における荷の収納を説明する上面概略図である。
【発明を実施するための形態】
【0013】
本発明に係る自動倉庫を実施するための形態を実施例に基づいて以下に説明する。
【実施例】
【0014】
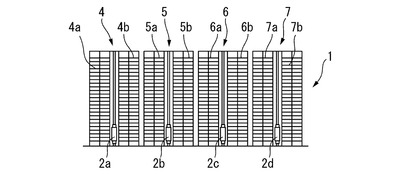
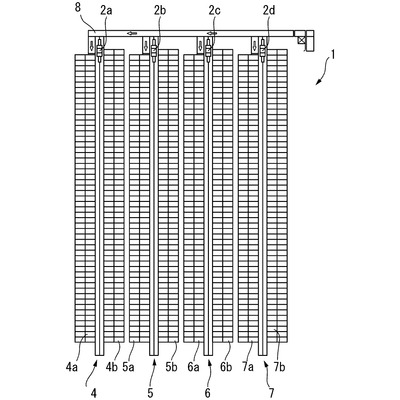
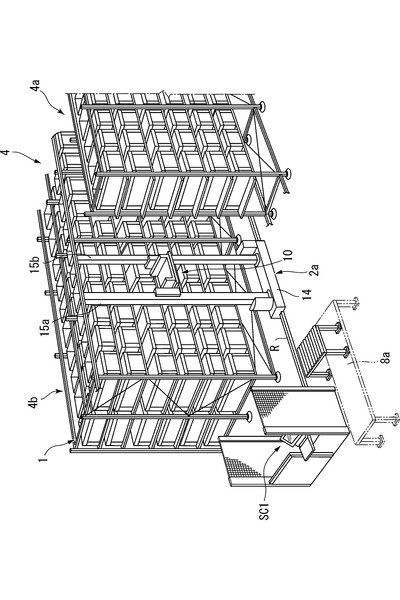
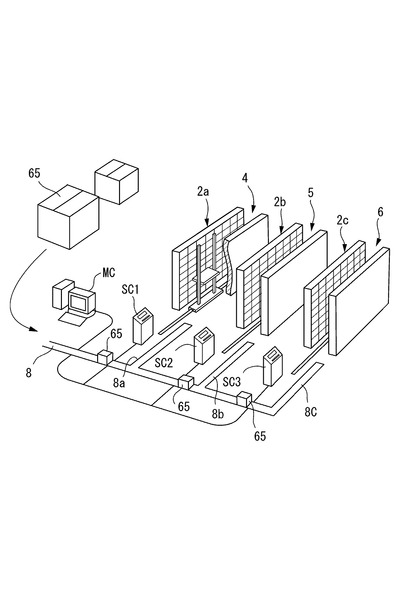
本発明の実施例を図面に基づいて説明すると、先ず図1には、本発明の実施例としての自動立体倉庫1が示されており、この自動立体倉庫(以下自動倉庫1と称する)は、複数の荷65を4基の同一構成のスタッカクレーン2a,2b,2c,2dにより自動的に出し入れ自在に収納保管する倉庫であって、この自動倉庫1は4基のスタッカクレーン2a,2b,2c,2dを挟んでそれらの両側には、ラック4a,4b及び5a,5bないし6a,6bそして7a,7bが互いに向き合って配設され、これらの互いに向き合うラック4a,4b及び5a,5bないし6a,6bそして7a,7bはそれぞれブロック単位で構成され、それぞれを収納棚ブロック4,5,6,7と称し、前後に延設した高層構造物として構築されている(図2参照)。なお各ラック4a,4b及び5a,5bないし6a,6bそして7a,7bは、前後方向に複数の荷65(ここでは2個)を並べて配置可能に奥行きを備えている。
【0015】
これら収納棚ブロック4,5,6,7の一端入口側には、それぞれ荷65の入、出庫を行う入出庫ステーションが設けられ、これら入出庫ステーションには、図6に示されるように、ホストコンピュータMCの指令に基づいて作動するシステムコントローラSC1、SC2、SC3が配設されている。また、この入出庫ステーションには、入、出荷される荷65の搬出入を行う搬送装置8から分岐された分岐搬送装置8a,8b,8cが近傍位置まで配置されている。
【0016】
一方、4基のスタッカクレーン2a,2b,2c,2dは、システムコントローラSC1,SC2,SC3からの指令によりラック4aと4b,5aと5b,6aと6b及び7aと7bのそれぞれ相対する前面を横切る方向に走行し、前後並びに上下方向に最短距離で自動走行し、位置決め停止した後、荷の出し入れを行う。
【0017】
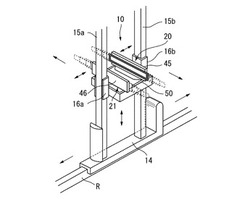
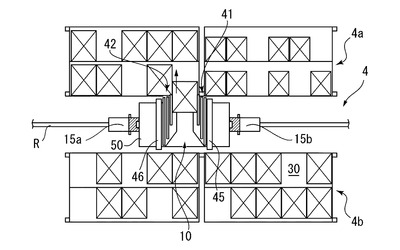
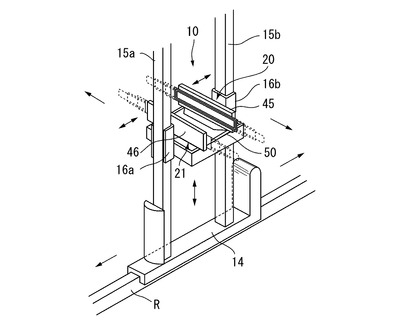
次に、スタッカクレーン2aに基づき図3〜図5を参照して詳述する。このスタッカクレーン2aは、収納棚ブロック4のラック4a,4b専用に使用されるもので、システムコントローラSC1からの指令に基づいて移動制御されるようになっており、対面するラック4a,4b間の床面に設置された1本のレールR上を例えばインバータモータ等の図示しない駆動装置により自動走行する走行台車14と、この走行台車14の前後に立設した一対のマスト15a,15bと、ラック4a,4bに対し荷の出し入れを行うアーム部材20、21と荷台(基台50と載置台19)とからなる、これらマスト15a,15bに対し上下方向に移動停止し移載装置10とで構成されている。
【0018】
図5に示すように、この移載装置10は、インバータモータ等の駆動装置により昇降可能に案内支持された支持体16a,16bと、これら支持体16a,16b間に水平に支持された基台50と、この基台50上面の両側に並設され、スタッカクレーン2aの移動方向に対し直交するように、両側の対向するラック4a,4bに向けて前後に移動可能、且つ左右方向にも同時に移動可能な挟持腕となる板状のアーム部材20、21と、から構成されている。
【0019】
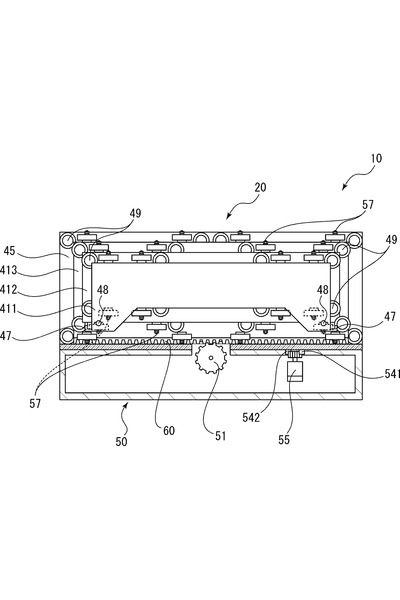
次に図7から図10には移載装置10の構造が開示されている。移載装置10は前後および左右方向に移動可能な左右一対のアーム部材20、21を備えており、このアーム部材20、21は、多段的に立設した複数の立設状態の平板状部材(411,412,413,421,422,423)と、外枠45、46とからなる。これら平板状部材は互いに、かつ外枠45、46に対して長手方向にそれぞれ相対移動可能に配置されている。外枠45、46は基台50に対して左右に移動可能にその基台50に設置されており、最も外側に位置する平板状部材(413,423)が回転遊嵌部材57によって外枠45、46に対して前後に移動可能に案内保持されている。
【0020】
また同じように、最も外側に位置する平板状部材(413,423)に設けられている回転遊嵌部材57によって、1つ内側に位置する平板状部材(412,422)が前後に移動可能に案内保持されている。同じく更に内側に位置する平板状部材(412,422)に設けられている回転遊嵌部材57によって、最も内側に位置する平板状部材(411,421)が前後に移動可能に案内保持されている(図7、8参照)。更に、平板状部材(411,412,413,421,422,423)の前後相対移動を滑らかにするために、移動誘導体49が設けられている。このように、アーム部材20、21を前後に移動させてもその形状が立設状態(上下の長さが横幅より大)の平板状部材(411,412,413,421,422,423)の組み合わせであるため、前後方向に移動させても全体的に撓みが少ない。
【0021】
56は基台50に設置された駆動装置であり、駆動装置56から延びる棒状部材53にラチェット51、52がスプライン結合されており、これらラチェット51、52は、外枠45、46から垂下した案内片63で左右の移動が規制され、外枠45、46と同期して動くようになっている。またラチェット51、52は、それぞれ最も外側に位置する平板状部材413、423の底部に設けられた平ギア60、61に噛合されている。そのため、外枠45、46に対して左右に相対移動しない平ギア60、61とラチェット51、52は常時噛合状態が維持されている。ラチェット51、52は、棒状部材53によってスプライン結合されているため、この駆動装置56の回動による棒状部材53の回転力で、ラチェット51、52に噛合された平ギア60、61が同時に前後移動されることになる。
【0022】
また、平板状部材(411,412,421,422)は、ここでは図示しないチェーンとラチェットによって、前記駆動装置56の動力による最も外側に位置する平板状部材413、423の前後移動に追従するようになっている。ここで前記チェーンと前記ラチェットの組み合わせによって平板状部材(411,412,413,421,422,423)は、内側に設置されている平板状部材ほど移動距離が長くなるようになっている。
【0023】
なお、この実施例においては、アーム部材20、21を前後に移動させてもその形状が立設状態(上下の長さが横幅より大)の平板状部材(411,412,413,421,422,423)の組み合わせであるため、前後方向に移動させても全体的に撓みが少ない。そのため、後述するアーム部材20、21先端に設けられる係止手段を構成する係止片47の送り出し位置を安定させることができるばかりか、挟持位置も安定して確保できる。また、荷の移動時におけるアーム部材の撓みも少なくできる。
【0024】
また、図9(a)に示すように、外枠45、46には固定部541、542によってラチェット591、592を軸として回転する無端チェーン58が固定され、図7及び図9に示される駆動部55の回転により外枠45、46が相対的に左右に移動可能になっている。さらに、前述したようにラチェット51、52は棒状部材53にスプライン結合されており、これらラチェット51、52は外枠45、46と同期して棒状部材53に沿って自由に動けるようになっている。さらに平板状部材(411,412,413,421,422,423)は、外枠45、46に対して前後の相対移動は許容されているものの、左右移動は規制されている。
【0025】
このように、移動可能な左右一対のアーム部材20、21が、左右方向に移動可能になっているため、荷65を左右方向から挟持できる挟持手段となり、かつアーム部材20、21を長手方向に対して移動可能になっているため、これら動きを荷65の移載処理に利用できる。
【0026】
前記したように、マスト15a,15bに対し移載装置10が上下方向に移動可能になっており、図10に示すように、最も内側に位置する平板状部材(411,421)には係止手段を構成する係止片47が設けられており、さらに、荷65には係止部70が設けられている。したがって、平板状部材(411,421)の係止片47を荷65の正面部分に近接させ、移載装置10を上方に移動させることで係止片47を係止部70に係止できるようになっている。また、最も内側に位置する平板状部材(411,421)には側面係合片48が設けられており、荷65の外側面には係合凹部71が設けられているため、平板状部材(411,421)の側面係合片48を荷65の側部に近接させ、挟持する方向に移動させることにより、側面係合片48を荷65の係合凹部71に係合できるようになっている。
【0027】
次に、荷の移載処理の実施例を図11から図13を使って説明する。まず、図11(a)において、ここでは図示しない駆動装置56の駆動で、最も外側に位置する平板状部材(413,423)が長手方向(荷65方向)に移動を始めると、その動きに従動して平板状部材(411,412,421,422)が移動する。そして、図11(b)に示されるように、荷65の係止部70の直下に平板状部材(411,421)に設けられた係止手段を構成する係止片47が到達したところで長手方向(荷65方向)移動が停止され、スタッカクレーン自体の上下移動によって係止手段を構成する係止片47が荷65の係止部70に係止される。この状態から駆動装置56の駆動の駆動で平板状部材(411,412,413,421,422,423)が長手方向(載置台19方向)に移動が開始され、荷65の左右側面を挟持手段できる位置まで引き出される(図11(c)参照)。そして、スタッカクレーン自体の上下移動によって係止手段を構成する係止片47が荷65の係止部70から外される(図12(d)参照)。
【0028】
次に、図12(e)に示すように、図7に示される駆動装置55の動きでアーム部材20,21が、荷65を挟持可能な幅まで広がるように左右に移動される。次に図7に示される駆動装置56によって、荷65を挟持できるだけの距離、平板状部材(411,412,413,421,422,423)が長手方向に移動される(図12(f)参照)。
【0029】
そして、図13(g)に示すように、アーム部材20,21が、荷65を挟持可能な幅まで狭まるように左右に移動され、最も内側に位置する平板状部材(411,421)に設けられた側面係合片48が、荷65の外側面に設けられた係合凹部71に係合されるとともに、平板状部材(411,412,413,421,422,423)の長手方向の移動によって荷65が載置台19方向に移動される(図13(h)参照)。さらにアーム部材20,21の荷65を挟持可能な幅まで広がる左右の移動によって側面係合片48の係合の解除し(図13(i)参照)、再度、平板状部材(411,421)に設けられた側面係合片48を荷65の外側面に設けられた更に奥側の係合凹部71に係合させ、図13(h)のような平板状部材(411,412,413,421,422,423)の載置台19方向への移動工程を繰り返すことにより、荷65の載置台19への移載が完了することになる。
【0030】
前述の実施例は、図4に示すように、ラック4aの荷65を載置台19に移す工程を示しているが、この平板状部材(411,412,413,421,422,423)は、逆の方向にも前後に移動可能になっており、ラック間(例えば図1,2に示される4aと4b間)に形成された走行路を挟んだ反対側のラック4bの荷65に対しての移動工程が可能になっている。
【0031】
図4に示すように、各ラック4a,4b及び5a,5bないし6a,6bそして7a,7bは、前後方向に複数の荷(ここでは2個)を並べて配置可能に奥行きを備えており、ラック内の奥に収納されている荷65を取り出す際には、アーム部材20,21をさらに後述する図16(i)に示される位置まで移動させることで、平板状部材(411,421)に設けられた係止手段を構成する係止片47を荷65の係止部60に係止させ、図11(b)で示される位置まで荷65を移動させ、前述の図11(c)、図12(d)(e)(f)、図13(g)(h)(i)の移動工程を実施することにより、ラック内の奥に収納されている荷65を載置台19に移載できる。
【0032】
次に、荷の移載処理の実施例を図14から図15を使って説明する。まず、図14(a)において、アーム部材20,21が、荷65を挟持可能な幅まで狭まるように左右に移動され、最も内側に位置する平板状部材(411,421)に設けられた側面係合片48が、荷65の外側面に設けられた係合凹部71に係合されるとともに、平板状部材(411,412,413,421,422,423)の長手方向の移動によって荷65がラック棚面30方向に移動される(図14(b)参照)。さらにアーム部材20,21の荷65を挟持可能な幅まで広がる左右の移動によって側面係合片48の係合の解除し(図14(c)参照)、再度、平板状部材(411,421)に設けられた側面係合片48を荷65の外側面に設けられた更に手前側の係合凹部71に係合させ、平板状部材(411,412,413,421,422,423)のラック棚面30方向への移動工程を繰り返す。
【0033】
そして、所定位置まで荷65が仮収納された状態で、側面係合片48の係合が解除される(図14(c)参照)。次に、アーム部材20,21の最も内側に位置する平板状部材(411,421)からなる幅が荷の幅寸法以下になるように左右一対のアーム部材20,21が移動され(図15(d)参照)、アーム部材20,21を荷65の方向へ移動させ、前記荷をラック内に更に押し込むようにして収納を完了する(図15(e)参照)。この時、ラック内の奥に荷65を収納する場合は、さらにアーム部材を荷65の方向へ移動させることで収納を完了する(図15(f)参照)。
【符号の説明】
【0034】
1 自動倉庫
2 スタッカクレーン
10 移載装置
19 載置台
20,21 アーム部材
30 ラック棚面
411,412 平板状部材
413 平板状部材
421,422 平板状部材
423 平板状部材
45、46 外枠
47 係止片(係止手段)
48 側面係合片
49 移動誘導体
50 基台
51,52 ラチェット
541、542 固定部
55、56 駆動装置
58 無端チェーン
65 荷
70 係止部
71 係合凹部
SC システムコントローラ
【特許請求の範囲】
【請求項1】
制御装置の指令に基づき、移載装置がラックと荷台間での荷の移載を行うとともに、該荷台が複数段のラック間に形成された走行路を走行できるようになっている自動倉庫であって、
前記移載装置が、前後および左右方向に移動可能な左右一対のアーム部材を備え、左右一対の前記アーム部材は、両アーム部材の幅が荷の幅寸法以下になるように移動された状態で前記荷を係止できる係止手段と、両アーム部材の幅が広がるように移動された状態から荷の左右側面を挟持できる挟持手段と、を有することを特徴とする自動倉庫。
【請求項2】
前記アーム部材は、荷台の走行時においてはラック間に形成された走行路の幅内に収納され、荷の移載時において荷台に設けられた駆動手段により走行路を挟んで対向する両ラックに対して前後に移動自在に配置され、前記ラック間に形成された走行路を挟んだ両ラックの荷に対してアクセス可能になるように前記係止手段と前記挟持手段とを有していることを特徴とする請求項1に記載の自動倉庫。
【請求項3】
前記アーム部材は、前後および左右方向に移動可能な立設状態の平板状部材からなり、平板状部材の先頭部分に前記係止手段が設けられていることを特徴とする請求項1または2に記載の自動倉庫。
【請求項4】
前記アーム部材は、多段的に立設した複数の立設状態の平板状部材からなり、これら平板状部材が互いに相対移動可能に駆動され、伸縮自在になっていることを特徴とする請求項1ないし3のいずれかに記載の自動倉庫。
【請求項5】
前記荷の左右側面に係合凹部が形成されるとともに、前記アーム部材の先頭に位置する平板状部材に前記係合凹部に係合する係合片が形成されていることを特徴とする請求項1ないし4のいずれかに記載の自動倉庫。
【請求項1】
制御装置の指令に基づき、移載装置がラックと荷台間での荷の移載を行うとともに、該荷台が複数段のラック間に形成された走行路を走行できるようになっている自動倉庫であって、
前記移載装置が、前後および左右方向に移動可能な左右一対のアーム部材を備え、左右一対の前記アーム部材は、両アーム部材の幅が荷の幅寸法以下になるように移動された状態で前記荷を係止できる係止手段と、両アーム部材の幅が広がるように移動された状態から荷の左右側面を挟持できる挟持手段と、を有することを特徴とする自動倉庫。
【請求項2】
前記アーム部材は、荷台の走行時においてはラック間に形成された走行路の幅内に収納され、荷の移載時において荷台に設けられた駆動手段により走行路を挟んで対向する両ラックに対して前後に移動自在に配置され、前記ラック間に形成された走行路を挟んだ両ラックの荷に対してアクセス可能になるように前記係止手段と前記挟持手段とを有していることを特徴とする請求項1に記載の自動倉庫。
【請求項3】
前記アーム部材は、前後および左右方向に移動可能な立設状態の平板状部材からなり、平板状部材の先頭部分に前記係止手段が設けられていることを特徴とする請求項1または2に記載の自動倉庫。
【請求項4】
前記アーム部材は、多段的に立設した複数の立設状態の平板状部材からなり、これら平板状部材が互いに相対移動可能に駆動され、伸縮自在になっていることを特徴とする請求項1ないし3のいずれかに記載の自動倉庫。
【請求項5】
前記荷の左右側面に係合凹部が形成されるとともに、前記アーム部材の先頭に位置する平板状部材に前記係合凹部に係合する係合片が形成されていることを特徴とする請求項1ないし4のいずれかに記載の自動倉庫。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−236682(P2012−236682A)
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願番号】特願2011−106525(P2011−106525)
【出願日】平成23年5月11日(2011.5.11)
【出願人】(000000561)株式会社岡村製作所 (1,415)
【Fターム(参考)】
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願日】平成23年5月11日(2011.5.11)
【出願人】(000000561)株式会社岡村製作所 (1,415)
【Fターム(参考)】
[ Back to top ]