
自動分析装置とその異常停止回復方法
【課題】障害物が被駆動装置と衝突して分析装置が異常停止しても分析途中の試薬や検体を無駄にすることなく短時間で分析を再開することが可能な自動分析装置とその異常停止回復方法を提供すること。
【解決手段】駆動手段によって駆動される被駆動装置を複数備え、検体と試薬とを反応させて検体を分析する自動分析装置とその異常停止回復方法。自動分析装置1は、被駆動装置の駆動位置を検知する光センサと、複数の被駆動装置を制御すると共に、光センサからの出力をもとに被駆動装置が障害物と衝突したか否かを判定する制御部41とを備え、制御部は、被駆動装置23が障害物と衝突したと判定した場合に、衝突した被駆動装置23を他の被駆動装置と共に停止させ、被駆動装置23を停止中に初期化した後、被駆動装置23を他の被駆動装置と同期させて駆動を再開させる。
【解決手段】駆動手段によって駆動される被駆動装置を複数備え、検体と試薬とを反応させて検体を分析する自動分析装置とその異常停止回復方法。自動分析装置1は、被駆動装置の駆動位置を検知する光センサと、複数の被駆動装置を制御すると共に、光センサからの出力をもとに被駆動装置が障害物と衝突したか否かを判定する制御部41とを備え、制御部は、被駆動装置23が障害物と衝突したと判定した場合に、衝突した被駆動装置23を他の被駆動装置と共に停止させ、被駆動装置23を停止中に初期化した後、被駆動装置23を他の被駆動装置と同期させて駆動を再開させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動分析装置とその異常停止回復方法に関するものである。
【背景技術】
【0002】
従来、分析装置は、分析動作に伴って検体又は試薬を分注する分注アームや液体を攪拌する攪拌棒、反応容器や分注用チップを移送させるロボットアームのような移送機構等の被駆動装置を複数備えている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2003−83992号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、従来の分析装置は、障害物が被駆動装置の駆動範囲に侵入して衝突した場合、装置全体を異常停止した後、改めて複数の被駆動装置を初期化している。このため、分析途中の試薬や検体が無駄になるだけでなく、初期化に要する時間も無駄になるという問題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、障害物が被駆動装置と衝突して分析装置が異常停止しても分析途中の試薬や検体を無駄にすることなく短時間で分析を再開することが可能な自動分析装置とその異常停止回復方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明の自動分析装置は、駆動手段によって駆動される被駆動手段を複数備え、検体と試薬とを反応させて検体を分析する自動分析装置であって、前記被駆動手段の駆動位置を検知する検知手段と、前記複数の被駆動手段を制御すると共に、前記検知手段からの出力をもとに前記被駆動手段が障害物と衝突したか否かを判定する制御手段と、を備え、前記制御手段は、前記被駆動手段が障害物と衝突したと判定した場合に、衝突した前記被駆動手段を他の被駆動手段と共に停止させ、衝突した当該被駆動手段を停止中に初期化した後、衝突した当該被駆動手段を前記他の被駆動手段と同期させて駆動を再開させることを特徴とする。
【0007】
また、本発明の自動分析装置は、上記の発明において、衝突した前記被駆動手段は、ステッピングモータによって駆動されることを特徴とする。
【0008】
また、本発明の自動分析装置は、上記の発明において、前記検知手段は、衝突した前記被駆動手段の駆動経路上に設置される光センサであることを特徴とする。
【0009】
また、本発明の自動分析装置は、上記の発明において、前記複数の被駆動手段は、互いに駆動経路が重なる干渉領域を有することを特徴とする。
【0010】
また、上述した課題を解決し、目的を達成するために、本発明の自動分析装置の異常停止回復方法は、駆動手段によって駆動される被駆動手段を複数備え、検体と試薬とを反応させて検体を分析する自動分析装置の異常停止回復方法であって、前記被駆動手段の駆動位置を取得する駆動位置取得工程と、取得した駆動位置をもとに前記被駆動手段が障害物と衝突したか否かを判定する衝突判定工程と、前記被駆動手段が障害物と衝突した場合に、衝突を検知した前記被駆動手段を他の被駆動手段と共に異常停止させる異常停止工程と、衝突した当該被駆動手段を異常停止中に初期化する初期化工程と、衝突した当該被駆動手段を前記他の被駆動手段と同期させて駆動を再開させる停止回復工程と、を含むことを特徴とする。
【0011】
また、本発明の自動分析装置の異常停止回復方法は、上記の発明において、前記複数の被駆動手段が互いに駆動経路が重なる干渉領域を有する場合、障害物と衝突した前記被駆動手段が前記干渉領域内で停止しているか否かを判定する停止領域判定工程と、前記干渉領域内で停止している前記被駆動手段を前記干渉領域外へ移動させる移動工程と、を含むことを特徴とする。
【発明の効果】
【0012】
本発明によれば、被駆動手段が障害物と衝突した場合に、衝突した被駆動手段を他の被駆動手段と共に停止させ、衝突した当該被駆動手段を停止中に初期化した後、衝突した当該被駆動手段を他の被駆動手段と同期させて駆動を再開させるので、障害物が被駆動装置と衝突して分析装置が異常停止しても分析途中の試薬や検体を無駄にすることなく短時間で分析を再開することが可能な自動分析装置とその異常停止回復方法を提供することができるという効果を奏する。
【発明を実施するための最良の形態】
【0013】
以下、図面を参照して、本発明の自動分析装置とその異常停止回復方法を、酵素免疫測定法(EIA)によって被検血液の抗原抗体反応を行なって免疫検査を実施する自動分析装置を例に説明する。
【0014】
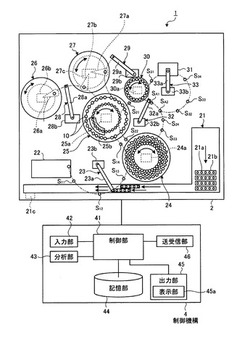
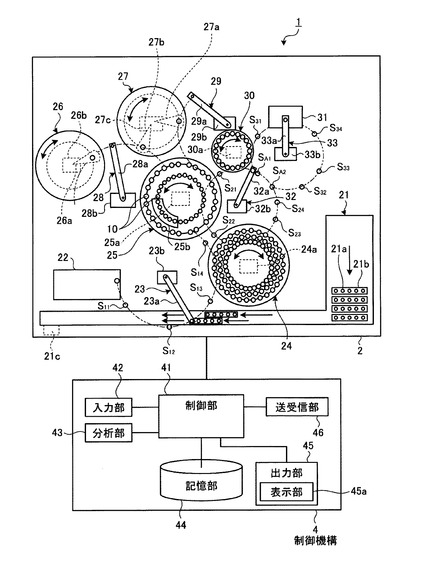
図1は、自動分析装置の構成を示す模式図である。自動分析装置1は、図1に示すように、検体と試薬との間の反応物の作用による発光基質の発光量を測定する測定機構2と、測定機構2を含む自動分析装置1全体の制御を行なうと共に、測定機構2における測定結果の分析を行なう制御機構4とを備えている。自動分析装置1は、これらの二つの機構が連携することによって複数の検体の免疫学的な分析を自動的に行なう。
【0015】
測定機構2は、図1に示すように、検体移送装置21、チップ格納部22、検体分注装置23、免疫反応テーブル24、BFテーブル25、第1試薬庫26、第2試薬庫27、第1試薬分注装置28、第2試薬分注装置29、酵素反応テーブル30、測光装置31、第1反応管移送装置32及び第2反応管移送装置33を備えている。測定機構2の各構成部は、所定の動作処理を行なう単数または複数のユニットを備えている。
【0016】
検体移送装置21は、図1に示すように、検体を収容した複数の検体容器21aを保持した複数の検体ラック21bを図中の矢印方向に順次搬送する。検体容器21aに収容された検体は、検体の提供者から採取した血液または尿などである。検体移送装置21は、ベルトコンベアをモータ等の駆動部21cによって駆動することによって検体ラック21bを搬送する。
【0017】
チップ格納部22は、複数のチップを整列したチップケースが設置されている。チップ格納部22は、このケースからチップを検体分注装置23のノズルに供給する。このチップは、感染症項目測定時のキャリーオーバー防止のため、検体分注装置23のノズル先端に装着され、検体分注ごとに交換されるディスポーザブルタイプの検体分注用チップである。
【0018】
検体分注装置23は、図1に示すように、鉛直方向への昇降及び自身の基端部を回転軸として回転するアーム23aを備えており、ステッピングモータ23bに駆動され、アーム23aの先端に検体の吸引及び吐出を行なうチップが着脱自在に取り付けられる。検体分注装置23は、検体移送装置21によって吸引位置に移動された検体容器21a内の検体をチップによって吸引し、アーム23aを旋回させ、BFテーブル25によって搬送される反応管10に所定タイミングで分注する。
【0019】
ここで、検体分注装置23は、アーム23aの駆動経路上に光センサS11〜S14が配置されている。光センサS11〜S14は、アーム23aの駆動位置を検知する検知手段であり、各センサが検知したアーム23aの検知信号を制御部41へ出力する。このような光センサとしては、反射型の光センサを使用することができ、以下に説明する光センサS21〜S24、光センサS31〜S34及び光センサSA1,SA2も同様である。
【0020】
免疫反応テーブル24は、図1に示すように、複数の反応管10を配列する反応ラインが同心円上に複数配置されており、モータ等の駆動部24aによって中心を通る回転軸の周りに回転し、配置した反応管10を矢印で示す周方向に搬送する。免疫反応テーブル24は、各反応ラインのそれぞれに配置された反応管10内で検体と分析項目に対応する所定の試薬とを反応させる。免疫反応テーブル24は、前記反応ラインごとに回動し、免疫反応テーブル24に配置された反応管を所定タイミングで所定位置に移送する。
【0021】
BFテーブル25は、図1に示すように、複数の反応管10を配列する反応ラインが同心円上に複数配置されており、モータ等の駆動部25aによって中心を通る回転軸の周りに回転し、配置した反応管10を矢印で示す周方向に搬送する。BFテーブル25は、所定の洗浄液を反応管10へ吸引吐出して検体または試薬における未反応物質を分離するBF(Bound-Free)分離を実施するBF洗浄処理を行なう。このため、BFテーブル25は、BF分離に必要な磁性粒子を集磁する集磁機構、BF洗浄液を反応管10内に吐出・吸引してBF分離を実施するBF洗浄ノズルを有するBF洗浄部25b及び集磁された磁性粒子を分散させる攪拌機構等を有している。
【0022】
第1試薬庫26は、図1に示すように、BFテーブル25に配置される反応管10内に分注する第1試薬を収容した第1試薬容器26aが複数収納され、モータ等の駆動部26bによって中心を通る回転軸の周りに回転される。この回転により、第1試薬庫26は、配置した反応管10を矢印で示す周方向に搬送する。第1試薬は、分析対象である検体内の抗原または抗体と特異的に結合する反応物質を不溶性担体である磁性粒子に固着させた試薬である。
【0023】
第2試薬庫27は、図1に示すように、第2試薬を収容した第2試薬容器27aや標識物質との酵素反応によって発光する基質を含む基質液を収容した基質液容器27bを複数収納する。第2試薬庫27は、モータ等の駆動部27cによって中心を通る回転軸の周りに回転され、収納した第2試薬容器27aや基質液容器27bを矢印で示す周方向に搬送する。第2試薬は、磁性粒子と結合した抗原または抗体と特異的に結合する標識物質(たとえば酵素)を含む試薬である。
【0024】
第1試薬分注装置28は、図1に示すように、鉛直方向への昇降及び自身の基端部を回転軸として回転するアーム28aを備えており、第1試薬の吸引および吐出を行なうプローブがアーム28aの先端に取り付けられている。第1試薬分注装置28は、モータ等の駆動部28bによって駆動され、第1試薬庫26が吸引位置に搬送した第1試薬容器26aから第1試薬を吸引し、BFテーブル25上の第1試薬吐出位置に搬送された反応管10に吐出して第1試薬の分注を行う。また、第1試薬分注装置28は、第2試薬庫27が吸引位置に搬送した基質液容器27bから基質液を吸引し、BFテーブル25上の基質液吐出位置に搬送された反応管10に吐出して基質液の分注も行う。
【0025】
第2試薬分注装置29は、第1試薬分注装置28と同様に、先端にプローブを取り付けたアーム29aと、モータ等の駆動部29bとを有している。第2試薬分注装置29は、第2試薬庫27が吸引位置に搬送した第2試薬容器27aから第2試薬を吸引し、BFテーブル25上の第2試薬吐出位置に搬送された反応管10に吐出して第2試薬の分注を行う。
【0026】
酵素反応テーブル30は、図1に示すように、BFテーブル25から移送される反応管10を周方向に沿って配列する反応ラインを有し、反応管10内に注入された基質液内の基質が発光するように酵素反応処理を行なう。酵素反応テーブル30は、モータ等の駆動部30aによって中心を通る回転軸の周りに回転し、配置した反応管10を矢印で示す周方向に搬送する。反応管10内の反応液内の基質から発する発光は、測光装置31によって測定される。
【0027】
測光装置31は、たとえば、化学発光で生じた微弱な発光を検出する光電子倍増管を有し、カウント法を用いて発光量を測定する。また、測光装置31は、光学フィルターを保持し、発光強度に応じて光学フィルターにより減光された測定値によって真の発光強度を算出する。
【0028】
第1反応管移送装置32は、図1に示すように、鉛直方向への昇降及び自身の基端部を回転軸として回転するアーム32aを備えており、ステッピングモータ32bによって駆動される。第1反応管移送装置32は、液体を収容した反応管10をアーム32aによって所定タイミングの下に免疫反応テーブル24、BFテーブル25、酵素反応テーブル30、反応管供給部及び反応管廃棄部(共に図示せず)の所定位置に移送する。
【0029】
ここで、第1反応管移送装置32は、アーム32aの駆動経路上に光センサS21〜S24及び光センサSA1,SA2が配置されている。光センサS21〜S24及び光センサSA1,SA2は、アーム32aの駆動位置を検知する検知手段であり、各センサが検知したアーム32aの検知信号を制御部41へ出力する。また、アーム32aが第2反応管移送装置33のアーム33aと駆動経路が重なる干渉領域Ai(図4参照)内にあるか否かは、光センサS21〜S24及び光センサSA1,SA2からの出力をもとに制御部41が判定する。
【0030】
第2反応管移送装置33は、第1反応管移送装置32と同様に構成され、図1に示すように、アーム33aとステッピングモータ33bとを有しており、アーム33aの駆動経路の一部が第1反応管移送装置32のアーム33aと重複している。第2反応管移送装置33は、液体を収容した反応管10をアーム33aによって所定タイミングの下に酵素反応テーブル30、測光装置31及び反応管廃棄部(図示せず)の所定位置に移送する。
【0031】
ここで、第2反応管移送装置33は、アーム33aの駆動経路上に光センサS31〜S34及び光センサSA1,SA2が配置され、第1反応管移送装置32と光センサSA1,SA2を共有している。光センサS31〜S34及び光センサSA1,SA2は、アーム33aの駆動位置を検知する検知手段であり、各センサが検知したアーム33aの検知信号を制御部41へ出力する。また、アーム33aが干渉領域Ai(図4参照)内にあるか否かは、光センサS31〜S34及び光センサSA1,SA2からの出力をもとに制御部41が判定する。
【0032】
制御機構4は、制御部41、入力部42、分析部43、記憶部44、出力部45及び送受信部46を備えている。測定機構2及び制御機構4が備えるこれらの各部は、制御部41と電気的に接続されている。制御機構4は、一又は複数のコンピュータシステムを用いて実現される。制御機構4は、自動分析装置1の各処理にかかわる各種プログラムを用いて、測定機構2が実行する動作処理の制御を行なうと共に、測定機構2における測定結果の分析を行なう。
【0033】
制御部41は、制御機能を有するCPU等を用いて構成され、自動分析装置1の各構成部位の処理及び動作を制御する。制御部41は、これらの各構成部位に入出力される情報について所定の入出力制御を行ない、かつ、この情報に対して所定の情報処理を行なう。制御部41は、記憶部44が記憶するタイムチャートを含むプログラムをメモリから読み出すことにより自動分析装置1の制御を実行する。
【0034】
ここで、制御部41は、請求項1に規定する制御手段であり、被駆動手段である検体移送装置21、検体分注装置23、免疫反応テーブル24、BFテーブル25、第1試薬庫26、第2試薬庫27、第1試薬分注装置28、第2試薬分注装置29、酵素反応テーブル30、第1反応管移送装置32及び第2反応管移送装置33を制御する。制御部41は、光センサS11〜S14、光センサS21〜S24及び光センサSA1,SA2、光センサS31〜S34が検知した駆動位置をもとにアーム23a,32a,33aが所定のタイミングに所定の位置にあるか否か、従って障害物との衝突を検知し、これによりステッピングモータ23b,32b,33bの脱調の有無を判定する。また、制御部41は、光センサS21〜S24、光センサS31〜S34及び光センサSA1,SA2からの出力をもとにアーム32a,33aが干渉領域Ai(図4参照)内にあるか否かを判定する。
【0035】
入力部42は、種々の情報を入力するためのキーボード、出力部45を構成するディスプレイの表示画面上における任意の位置を指定するためのマウス等を用いて構成され、検体の分析に必要な諸情報や分析動作の指示情報等を外部から取得する。
【0036】
分析部43は、測定機構2から取得した測定結果に基づいて検体に対する分析処理等を行なう。
【0037】
記憶部44は、情報を磁気的に記憶するハードディスクと、自動分析装置1が処理を実行する際にその処理にかかわる各種プログラムをハードディスクからロードして電気的に記憶するメモリとを用いて構成され、検体の分析結果や異常停止時の回復方法等を含む諸情報を記憶している。記憶部44は、CD−ROM、DVD−ROM、PCカード等の記憶媒体に記憶された情報を読み取ることができる補助記憶装置を備えていてもよい。
【0038】
出力部45は、プリンタ、スピーカー等を用いて構成され、制御部41の制御のもと、分析に関する諸情報を出力する。出力部45は、ディスプレイ等を用いて構成された表示部45aを備えている。
【0039】
送受信部46は、図示しない通信ネットワークを介して所定の形式に従った情報の送受信を行なうインターフェースとしての機能を有している。
【0040】
以上のように構成される自動分析装置1は、図1に図示しない反応管供給部より、BFテーブル25の所定位置に第1反応管移送装置32によって反応管10が移送され、第1試薬分注装置28によって反応管10内に磁性粒子を含む第1試薬が分注される。そして、検体移送装置21によって吸引位置に移送された検体容器21aからチップを装着した検体分注装置23によって、BFテーブル25上の反応管10に検体が分注される。
【0041】
つぎに、反応管10は、BFテーブル25の攪拌機構によって攪拌された後、第1反応管移送装置32によって免疫反応テーブル24へ移送される。この場合、一定の反応時間経過によって、検体中の抗原と磁性粒子とが結合した反応物が生成される。その後、反応管10は、第1反応管移送装置32によって再度BFテーブル25に移送され、反応管10内の未反応物質を除去する第1BF洗浄処理が行われる。次いで、BF分離後の反応管10は、標識抗体を含む標識試薬が第2試薬として第2試薬分注装置29から分注され、攪拌機構によって攪拌される。この結果、反応物と標識抗体とが結合した免疫複合体が生成される。
【0042】
そして、この反応管10は、第1反応管移送装置32によって免疫反応テーブル24へ移送され、一定の反応時間が経過した後、BFテーブル25へ移送される。次いで、反応管10は、未反応の標識抗体を除去する2回目の第2BF洗浄処理がBFテーブル25上で行われる。その後、反応管10は、基質を含む基質液が第2試薬分注装置29によって分注され、再度攪拌機構によって攪拌される。
【0043】
つぎに、反応管10は、第1反応管移送装置32によって酵素反応テーブル30に移送され、一定時間放置して酵素反応を行わせた後、第2反応管移送装置33によって測光装置31へ移送される。酵素反応を経た基質は、免疫複合体の酵素作用により発光する。反応管10は、この状態で測光装置31によって基質の発光が測定される。そして、分析部43は、測定された光量をもとに検出対象の抗原量を求める分析処理を行なう。
【0044】
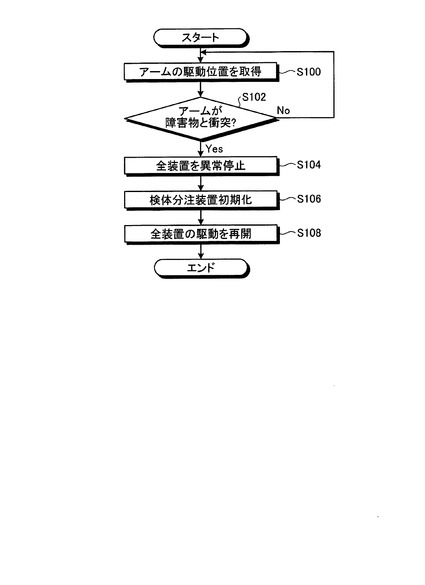
このとき、本発明の自動分析装置1は、オペレータの腕等の障害物が、例えば、検体分注装置23のアーム23aと衝突することがある。この場合、制御部41は、自動分析装置1を異常停止した後、検体分注装置23を初期化し、以下のようにして異常停止を回復する。以下、検体分注装置23のアーム23aと障害物とが衝突した場合を例に、制御部41が実行する本発明の自動分析装置の異常停止回復方法を図2に示すフローチャートを参照して説明する。
【0045】
制御部41は、アーム23aの駆動位置を取得する(ステップS100)。このとき、制御部41は、光センサS11〜S14が検知し、制御部41は光センサS11〜S14から入力される検知信号をもとにアーム23aの駆動位置を取得する。この駆動位置の取得は、自動分析装置1が分析動作を開始すると、制御部41が分析終了に至るまで連続して実行する。次に、制御部41は、アーム23aが障害物と衝突したか否かを判定する(ステップS102)。ここで、アーム23aが障害物と衝突すると、ステッピングモータ23bが脱調し、アーム23aが所定のタイミングにあるべき位置からずれてしまう。このため、制御部41は、光センサS11〜S14からの出力をもとに検知したアーム23aの駆動位置とアーム23aの駆動タイミングとを比較し、アーム23aが障害物と衝突したか否かを判定する。
【0046】
判定の結果、アーム23aが障害物と衝突していない場合(ステップS102,No)、制御部41は、ステップS100に戻ってアーム23aの駆動位置を取得する工程を繰り返す。一方、判定の結果、アーム23aが障害物と衝突していた場合(ステップS102,Yes)、制御部41は、衝突を検知した検体分注装置23を含む全装置を異常停止させる(ステップS104)。
【0047】
次いで、制御部41は、制御部41は、アーム23aが障害物と衝突した検体分注装置23を異常停止中に初期化する(ステップS106)。次に、制御部41は、記憶部44から読み出した前記タイムチャートを参照し、検体分注装置23を他の被駆動装置の停止時の状態に同期させ、検体分注装置23を含む全装置の駆動を再開させる(ステップS108)。
【0048】
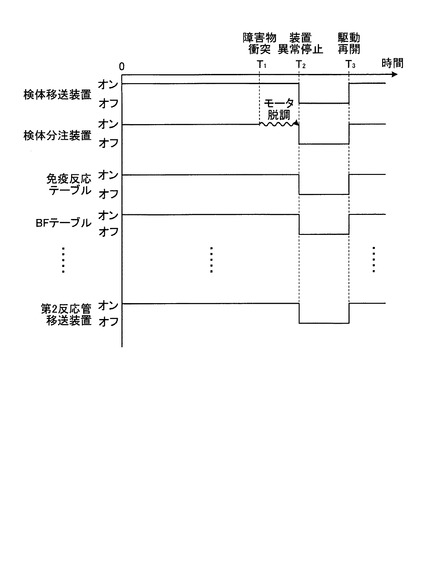
自動分析装置1は、以上のようにして異常停止回復方法を実行する。このとき、自動分析装置1の被駆動手段である検体移送装置21、検体分注装置23、免疫反応テーブル24、BFテーブル25、第1試薬庫26、……、第2反応管移送装置33におけるアーム23aと障害物との衝突に伴う装置全体の異常停止から作動再開に到るタイムチャートを図3に示す。
【0049】
図3に示すように、検体分注装置23のアーム23aが時刻T1に障害物と衝突すると、ステッピングモータ23bが脱調する。このため、制御部41は、光センサS11〜S14からの出力をもとにステッピングモータ23bの脱調を判定し、時刻T2に装置全体を異常停止させる。異常停止後、制御部41は、検体分注装置23を初期化し、他の装置と同期させた後、時刻T3に装置全体の駆動を再開させる。
【0050】
このように、自動分析装置1とその異常停止回復方法は、障害物と衝突した場合に、装置全体を停止させるが、障害物と衝突した検体分注装置23のみを初期化した後、他の装置と同期させて駆動を再開する。このため、自動分析装置1とその異常停止回復方法は、装置全体を初期化する場合に比べて、初期化に要する時間が短時間で済むので、分析途中の試薬や検体が無駄にならない。例えば、自動分析装置1は、障害物との衝突の可能性があるのは、被駆動手段である検体分注装置23、第1試薬分注装置28、第2試薬分注装置29、第1反応管移送装置32及び第2反応管移送装置33であるが、これらは、同じ被駆動手段であっても検体移送装置21、免疫反応テーブル24、BFテーブル25、第1試薬庫26、第2試薬庫27、酵素反応テーブル30に比べて初期化に要する時間が短時間で済む。
【0051】
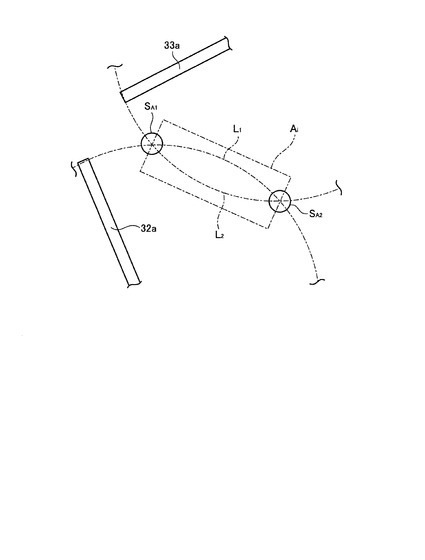
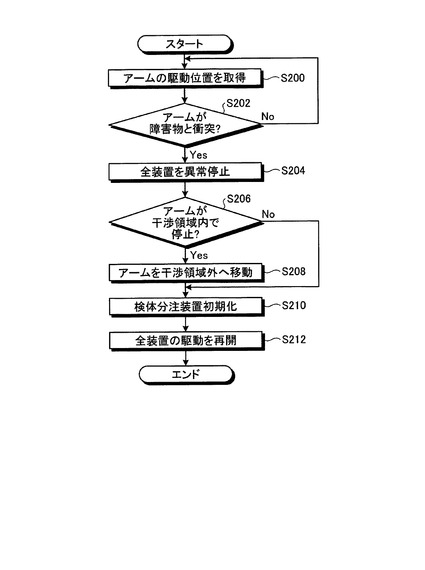
ここで、第1反応管移送装置32及び第2反応管移送装置33は、図4に示すように、アーム32aの駆動経路L1とアーム33aの駆動経路L2が重なる干渉領域Aiを有している。このため、アーム32aやアーム33aの一方が、干渉領域Ai内で停止する場合がある。このため、干渉領域Aiを有している場合には、以下のようにして装置全体の駆動を再開させる。この場合の自動分析装置の異常停止回復方法を図5に示すフローチャートを参照して以下に説明する。
【0052】
制御部41は、第1反応管移送装置32及び第2反応管移送装置33のアーム32a,33aの駆動位置を取得する(ステップS200)。次に、制御部41は、アーム32a,33aが障害物と衝突したか否かを判定する(ステップS202)。この場合、制御部41は、光センサS21〜S24、光センサS31〜S34及び光センサA1,A2からの出力をもとに検知したアーム32a,33aの駆動位置とアーム32a,33aの駆動タイミングとを比較し、アーム32a,33aが障害物と衝突したか否かを判定する。
【0053】
判定の結果、アーム32a,33aが障害物と衝突していない場合(ステップS202,No)、制御部41は、ステップS200に戻ってアーム32a,33aの駆動位置を取得する工程を繰り返す。一方、判定の結果、アーム32a,33aの一方が障害物と衝突していた場合(ステップS202,Yes)、制御部41は、衝突を検知した第1反応管移送装置32又は第2反応管移送装置33を含む全装置を異常停止させる(ステップS204)。
【0054】
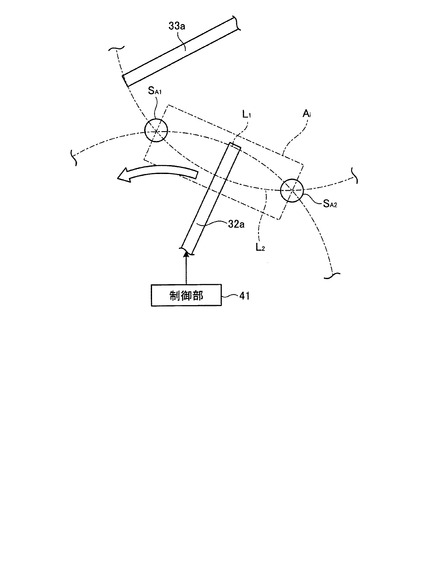
次いで、制御部41は、障害物と衝突したアームが干渉領域Ai内で停止しているか否かを判定する(ステップS206)。判定の結果、例えば、図6に示すように、衝突したアーム32aが干渉領域Ai内で停止していた場合(ステップS206,Yes)、制御部41は、ステッピングモータ32bを駆動し、図中に矢印で示すように、アーム32aを干渉領域Ai外へ移動させる(ステップS208)。このとき、制御部41は、光センサA1,A2からの出力をもとにアーム32aの干渉領域Ai外への移動を確認する。
【0055】
その後、制御部41は、アーム32aが障害物と衝突した第1反応管移送装置32を異常停止中に初期化する(ステップS210)。次に、制御部41は、記憶部44から読み出した前記タイムチャートを参照し、第1反応管移送装置32を他の被駆動装置の停止時の状態に同期させ、第1反応管移送装置32を含む全装置の駆動を再開させる(ステップS212)。
【0056】
一方、判定の結果、衝突したアーム32aが干渉領域Ai外で停止していた場合(ステップS206,No)、制御部41は、ステップS210へ移行し、以降の工程を実行することにより、装置全体の駆動を再開させる。
【図面の簡単な説明】
【0057】
【図1】自動分析装置の構成を示す模式図である。
【図2】本発明の自動分析装置の異常停止回復方法を説明するフローチャートである。
【図3】本発明の自動分析装置の異常停止回復方法を示すタイムチャートである。
【図4】2つの被駆動手段が、駆動経路の重なる干渉領域を有する場合を拡大して示す模式図である。
【図5】2つの被駆動手段が、駆動経路の重なる干渉領域を有する場合における自動分析装置の異常停止回復方法を説明するフローチャートである。
【図6】駆動経路が重なる干渉領域を有する被駆動手段が干渉領域内で異常停止した場合を拡大して示す模式図である。
【符号の説明】
【0058】
1 自動分析装置
2 測定機構
4 制御機構
10 反応管
21 検体移送装置
22 チップ格納部
23 検体分注装置
24 免疫反応テーブル
25 BFテーブル
26 第1試薬庫
27 第2試薬庫
28 第1試薬分注装置
29 第2試薬分注装置
30 酵素反応テーブル
31 測光装置
32 第1反応管移送装置
33 第2反応管移送装置
41 制御部
42 入力部
43 分析部
44 記憶部
45 出力部
46 送受信部
S11〜S14 光センサ
S21〜S24 光センサ
S31〜S34 光センサ
SA1,SA2 光センサ
【技術分野】
【0001】
本発明は、自動分析装置とその異常停止回復方法に関するものである。
【背景技術】
【0002】
従来、分析装置は、分析動作に伴って検体又は試薬を分注する分注アームや液体を攪拌する攪拌棒、反応容器や分注用チップを移送させるロボットアームのような移送機構等の被駆動装置を複数備えている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2003−83992号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、従来の分析装置は、障害物が被駆動装置の駆動範囲に侵入して衝突した場合、装置全体を異常停止した後、改めて複数の被駆動装置を初期化している。このため、分析途中の試薬や検体が無駄になるだけでなく、初期化に要する時間も無駄になるという問題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、障害物が被駆動装置と衝突して分析装置が異常停止しても分析途中の試薬や検体を無駄にすることなく短時間で分析を再開することが可能な自動分析装置とその異常停止回復方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明の自動分析装置は、駆動手段によって駆動される被駆動手段を複数備え、検体と試薬とを反応させて検体を分析する自動分析装置であって、前記被駆動手段の駆動位置を検知する検知手段と、前記複数の被駆動手段を制御すると共に、前記検知手段からの出力をもとに前記被駆動手段が障害物と衝突したか否かを判定する制御手段と、を備え、前記制御手段は、前記被駆動手段が障害物と衝突したと判定した場合に、衝突した前記被駆動手段を他の被駆動手段と共に停止させ、衝突した当該被駆動手段を停止中に初期化した後、衝突した当該被駆動手段を前記他の被駆動手段と同期させて駆動を再開させることを特徴とする。
【0007】
また、本発明の自動分析装置は、上記の発明において、衝突した前記被駆動手段は、ステッピングモータによって駆動されることを特徴とする。
【0008】
また、本発明の自動分析装置は、上記の発明において、前記検知手段は、衝突した前記被駆動手段の駆動経路上に設置される光センサであることを特徴とする。
【0009】
また、本発明の自動分析装置は、上記の発明において、前記複数の被駆動手段は、互いに駆動経路が重なる干渉領域を有することを特徴とする。
【0010】
また、上述した課題を解決し、目的を達成するために、本発明の自動分析装置の異常停止回復方法は、駆動手段によって駆動される被駆動手段を複数備え、検体と試薬とを反応させて検体を分析する自動分析装置の異常停止回復方法であって、前記被駆動手段の駆動位置を取得する駆動位置取得工程と、取得した駆動位置をもとに前記被駆動手段が障害物と衝突したか否かを判定する衝突判定工程と、前記被駆動手段が障害物と衝突した場合に、衝突を検知した前記被駆動手段を他の被駆動手段と共に異常停止させる異常停止工程と、衝突した当該被駆動手段を異常停止中に初期化する初期化工程と、衝突した当該被駆動手段を前記他の被駆動手段と同期させて駆動を再開させる停止回復工程と、を含むことを特徴とする。
【0011】
また、本発明の自動分析装置の異常停止回復方法は、上記の発明において、前記複数の被駆動手段が互いに駆動経路が重なる干渉領域を有する場合、障害物と衝突した前記被駆動手段が前記干渉領域内で停止しているか否かを判定する停止領域判定工程と、前記干渉領域内で停止している前記被駆動手段を前記干渉領域外へ移動させる移動工程と、を含むことを特徴とする。
【発明の効果】
【0012】
本発明によれば、被駆動手段が障害物と衝突した場合に、衝突した被駆動手段を他の被駆動手段と共に停止させ、衝突した当該被駆動手段を停止中に初期化した後、衝突した当該被駆動手段を他の被駆動手段と同期させて駆動を再開させるので、障害物が被駆動装置と衝突して分析装置が異常停止しても分析途中の試薬や検体を無駄にすることなく短時間で分析を再開することが可能な自動分析装置とその異常停止回復方法を提供することができるという効果を奏する。
【発明を実施するための最良の形態】
【0013】
以下、図面を参照して、本発明の自動分析装置とその異常停止回復方法を、酵素免疫測定法(EIA)によって被検血液の抗原抗体反応を行なって免疫検査を実施する自動分析装置を例に説明する。
【0014】
図1は、自動分析装置の構成を示す模式図である。自動分析装置1は、図1に示すように、検体と試薬との間の反応物の作用による発光基質の発光量を測定する測定機構2と、測定機構2を含む自動分析装置1全体の制御を行なうと共に、測定機構2における測定結果の分析を行なう制御機構4とを備えている。自動分析装置1は、これらの二つの機構が連携することによって複数の検体の免疫学的な分析を自動的に行なう。
【0015】
測定機構2は、図1に示すように、検体移送装置21、チップ格納部22、検体分注装置23、免疫反応テーブル24、BFテーブル25、第1試薬庫26、第2試薬庫27、第1試薬分注装置28、第2試薬分注装置29、酵素反応テーブル30、測光装置31、第1反応管移送装置32及び第2反応管移送装置33を備えている。測定機構2の各構成部は、所定の動作処理を行なう単数または複数のユニットを備えている。
【0016】
検体移送装置21は、図1に示すように、検体を収容した複数の検体容器21aを保持した複数の検体ラック21bを図中の矢印方向に順次搬送する。検体容器21aに収容された検体は、検体の提供者から採取した血液または尿などである。検体移送装置21は、ベルトコンベアをモータ等の駆動部21cによって駆動することによって検体ラック21bを搬送する。
【0017】
チップ格納部22は、複数のチップを整列したチップケースが設置されている。チップ格納部22は、このケースからチップを検体分注装置23のノズルに供給する。このチップは、感染症項目測定時のキャリーオーバー防止のため、検体分注装置23のノズル先端に装着され、検体分注ごとに交換されるディスポーザブルタイプの検体分注用チップである。
【0018】
検体分注装置23は、図1に示すように、鉛直方向への昇降及び自身の基端部を回転軸として回転するアーム23aを備えており、ステッピングモータ23bに駆動され、アーム23aの先端に検体の吸引及び吐出を行なうチップが着脱自在に取り付けられる。検体分注装置23は、検体移送装置21によって吸引位置に移動された検体容器21a内の検体をチップによって吸引し、アーム23aを旋回させ、BFテーブル25によって搬送される反応管10に所定タイミングで分注する。
【0019】
ここで、検体分注装置23は、アーム23aの駆動経路上に光センサS11〜S14が配置されている。光センサS11〜S14は、アーム23aの駆動位置を検知する検知手段であり、各センサが検知したアーム23aの検知信号を制御部41へ出力する。このような光センサとしては、反射型の光センサを使用することができ、以下に説明する光センサS21〜S24、光センサS31〜S34及び光センサSA1,SA2も同様である。
【0020】
免疫反応テーブル24は、図1に示すように、複数の反応管10を配列する反応ラインが同心円上に複数配置されており、モータ等の駆動部24aによって中心を通る回転軸の周りに回転し、配置した反応管10を矢印で示す周方向に搬送する。免疫反応テーブル24は、各反応ラインのそれぞれに配置された反応管10内で検体と分析項目に対応する所定の試薬とを反応させる。免疫反応テーブル24は、前記反応ラインごとに回動し、免疫反応テーブル24に配置された反応管を所定タイミングで所定位置に移送する。
【0021】
BFテーブル25は、図1に示すように、複数の反応管10を配列する反応ラインが同心円上に複数配置されており、モータ等の駆動部25aによって中心を通る回転軸の周りに回転し、配置した反応管10を矢印で示す周方向に搬送する。BFテーブル25は、所定の洗浄液を反応管10へ吸引吐出して検体または試薬における未反応物質を分離するBF(Bound-Free)分離を実施するBF洗浄処理を行なう。このため、BFテーブル25は、BF分離に必要な磁性粒子を集磁する集磁機構、BF洗浄液を反応管10内に吐出・吸引してBF分離を実施するBF洗浄ノズルを有するBF洗浄部25b及び集磁された磁性粒子を分散させる攪拌機構等を有している。
【0022】
第1試薬庫26は、図1に示すように、BFテーブル25に配置される反応管10内に分注する第1試薬を収容した第1試薬容器26aが複数収納され、モータ等の駆動部26bによって中心を通る回転軸の周りに回転される。この回転により、第1試薬庫26は、配置した反応管10を矢印で示す周方向に搬送する。第1試薬は、分析対象である検体内の抗原または抗体と特異的に結合する反応物質を不溶性担体である磁性粒子に固着させた試薬である。
【0023】
第2試薬庫27は、図1に示すように、第2試薬を収容した第2試薬容器27aや標識物質との酵素反応によって発光する基質を含む基質液を収容した基質液容器27bを複数収納する。第2試薬庫27は、モータ等の駆動部27cによって中心を通る回転軸の周りに回転され、収納した第2試薬容器27aや基質液容器27bを矢印で示す周方向に搬送する。第2試薬は、磁性粒子と結合した抗原または抗体と特異的に結合する標識物質(たとえば酵素)を含む試薬である。
【0024】
第1試薬分注装置28は、図1に示すように、鉛直方向への昇降及び自身の基端部を回転軸として回転するアーム28aを備えており、第1試薬の吸引および吐出を行なうプローブがアーム28aの先端に取り付けられている。第1試薬分注装置28は、モータ等の駆動部28bによって駆動され、第1試薬庫26が吸引位置に搬送した第1試薬容器26aから第1試薬を吸引し、BFテーブル25上の第1試薬吐出位置に搬送された反応管10に吐出して第1試薬の分注を行う。また、第1試薬分注装置28は、第2試薬庫27が吸引位置に搬送した基質液容器27bから基質液を吸引し、BFテーブル25上の基質液吐出位置に搬送された反応管10に吐出して基質液の分注も行う。
【0025】
第2試薬分注装置29は、第1試薬分注装置28と同様に、先端にプローブを取り付けたアーム29aと、モータ等の駆動部29bとを有している。第2試薬分注装置29は、第2試薬庫27が吸引位置に搬送した第2試薬容器27aから第2試薬を吸引し、BFテーブル25上の第2試薬吐出位置に搬送された反応管10に吐出して第2試薬の分注を行う。
【0026】
酵素反応テーブル30は、図1に示すように、BFテーブル25から移送される反応管10を周方向に沿って配列する反応ラインを有し、反応管10内に注入された基質液内の基質が発光するように酵素反応処理を行なう。酵素反応テーブル30は、モータ等の駆動部30aによって中心を通る回転軸の周りに回転し、配置した反応管10を矢印で示す周方向に搬送する。反応管10内の反応液内の基質から発する発光は、測光装置31によって測定される。
【0027】
測光装置31は、たとえば、化学発光で生じた微弱な発光を検出する光電子倍増管を有し、カウント法を用いて発光量を測定する。また、測光装置31は、光学フィルターを保持し、発光強度に応じて光学フィルターにより減光された測定値によって真の発光強度を算出する。
【0028】
第1反応管移送装置32は、図1に示すように、鉛直方向への昇降及び自身の基端部を回転軸として回転するアーム32aを備えており、ステッピングモータ32bによって駆動される。第1反応管移送装置32は、液体を収容した反応管10をアーム32aによって所定タイミングの下に免疫反応テーブル24、BFテーブル25、酵素反応テーブル30、反応管供給部及び反応管廃棄部(共に図示せず)の所定位置に移送する。
【0029】
ここで、第1反応管移送装置32は、アーム32aの駆動経路上に光センサS21〜S24及び光センサSA1,SA2が配置されている。光センサS21〜S24及び光センサSA1,SA2は、アーム32aの駆動位置を検知する検知手段であり、各センサが検知したアーム32aの検知信号を制御部41へ出力する。また、アーム32aが第2反応管移送装置33のアーム33aと駆動経路が重なる干渉領域Ai(図4参照)内にあるか否かは、光センサS21〜S24及び光センサSA1,SA2からの出力をもとに制御部41が判定する。
【0030】
第2反応管移送装置33は、第1反応管移送装置32と同様に構成され、図1に示すように、アーム33aとステッピングモータ33bとを有しており、アーム33aの駆動経路の一部が第1反応管移送装置32のアーム33aと重複している。第2反応管移送装置33は、液体を収容した反応管10をアーム33aによって所定タイミングの下に酵素反応テーブル30、測光装置31及び反応管廃棄部(図示せず)の所定位置に移送する。
【0031】
ここで、第2反応管移送装置33は、アーム33aの駆動経路上に光センサS31〜S34及び光センサSA1,SA2が配置され、第1反応管移送装置32と光センサSA1,SA2を共有している。光センサS31〜S34及び光センサSA1,SA2は、アーム33aの駆動位置を検知する検知手段であり、各センサが検知したアーム33aの検知信号を制御部41へ出力する。また、アーム33aが干渉領域Ai(図4参照)内にあるか否かは、光センサS31〜S34及び光センサSA1,SA2からの出力をもとに制御部41が判定する。
【0032】
制御機構4は、制御部41、入力部42、分析部43、記憶部44、出力部45及び送受信部46を備えている。測定機構2及び制御機構4が備えるこれらの各部は、制御部41と電気的に接続されている。制御機構4は、一又は複数のコンピュータシステムを用いて実現される。制御機構4は、自動分析装置1の各処理にかかわる各種プログラムを用いて、測定機構2が実行する動作処理の制御を行なうと共に、測定機構2における測定結果の分析を行なう。
【0033】
制御部41は、制御機能を有するCPU等を用いて構成され、自動分析装置1の各構成部位の処理及び動作を制御する。制御部41は、これらの各構成部位に入出力される情報について所定の入出力制御を行ない、かつ、この情報に対して所定の情報処理を行なう。制御部41は、記憶部44が記憶するタイムチャートを含むプログラムをメモリから読み出すことにより自動分析装置1の制御を実行する。
【0034】
ここで、制御部41は、請求項1に規定する制御手段であり、被駆動手段である検体移送装置21、検体分注装置23、免疫反応テーブル24、BFテーブル25、第1試薬庫26、第2試薬庫27、第1試薬分注装置28、第2試薬分注装置29、酵素反応テーブル30、第1反応管移送装置32及び第2反応管移送装置33を制御する。制御部41は、光センサS11〜S14、光センサS21〜S24及び光センサSA1,SA2、光センサS31〜S34が検知した駆動位置をもとにアーム23a,32a,33aが所定のタイミングに所定の位置にあるか否か、従って障害物との衝突を検知し、これによりステッピングモータ23b,32b,33bの脱調の有無を判定する。また、制御部41は、光センサS21〜S24、光センサS31〜S34及び光センサSA1,SA2からの出力をもとにアーム32a,33aが干渉領域Ai(図4参照)内にあるか否かを判定する。
【0035】
入力部42は、種々の情報を入力するためのキーボード、出力部45を構成するディスプレイの表示画面上における任意の位置を指定するためのマウス等を用いて構成され、検体の分析に必要な諸情報や分析動作の指示情報等を外部から取得する。
【0036】
分析部43は、測定機構2から取得した測定結果に基づいて検体に対する分析処理等を行なう。
【0037】
記憶部44は、情報を磁気的に記憶するハードディスクと、自動分析装置1が処理を実行する際にその処理にかかわる各種プログラムをハードディスクからロードして電気的に記憶するメモリとを用いて構成され、検体の分析結果や異常停止時の回復方法等を含む諸情報を記憶している。記憶部44は、CD−ROM、DVD−ROM、PCカード等の記憶媒体に記憶された情報を読み取ることができる補助記憶装置を備えていてもよい。
【0038】
出力部45は、プリンタ、スピーカー等を用いて構成され、制御部41の制御のもと、分析に関する諸情報を出力する。出力部45は、ディスプレイ等を用いて構成された表示部45aを備えている。
【0039】
送受信部46は、図示しない通信ネットワークを介して所定の形式に従った情報の送受信を行なうインターフェースとしての機能を有している。
【0040】
以上のように構成される自動分析装置1は、図1に図示しない反応管供給部より、BFテーブル25の所定位置に第1反応管移送装置32によって反応管10が移送され、第1試薬分注装置28によって反応管10内に磁性粒子を含む第1試薬が分注される。そして、検体移送装置21によって吸引位置に移送された検体容器21aからチップを装着した検体分注装置23によって、BFテーブル25上の反応管10に検体が分注される。
【0041】
つぎに、反応管10は、BFテーブル25の攪拌機構によって攪拌された後、第1反応管移送装置32によって免疫反応テーブル24へ移送される。この場合、一定の反応時間経過によって、検体中の抗原と磁性粒子とが結合した反応物が生成される。その後、反応管10は、第1反応管移送装置32によって再度BFテーブル25に移送され、反応管10内の未反応物質を除去する第1BF洗浄処理が行われる。次いで、BF分離後の反応管10は、標識抗体を含む標識試薬が第2試薬として第2試薬分注装置29から分注され、攪拌機構によって攪拌される。この結果、反応物と標識抗体とが結合した免疫複合体が生成される。
【0042】
そして、この反応管10は、第1反応管移送装置32によって免疫反応テーブル24へ移送され、一定の反応時間が経過した後、BFテーブル25へ移送される。次いで、反応管10は、未反応の標識抗体を除去する2回目の第2BF洗浄処理がBFテーブル25上で行われる。その後、反応管10は、基質を含む基質液が第2試薬分注装置29によって分注され、再度攪拌機構によって攪拌される。
【0043】
つぎに、反応管10は、第1反応管移送装置32によって酵素反応テーブル30に移送され、一定時間放置して酵素反応を行わせた後、第2反応管移送装置33によって測光装置31へ移送される。酵素反応を経た基質は、免疫複合体の酵素作用により発光する。反応管10は、この状態で測光装置31によって基質の発光が測定される。そして、分析部43は、測定された光量をもとに検出対象の抗原量を求める分析処理を行なう。
【0044】
このとき、本発明の自動分析装置1は、オペレータの腕等の障害物が、例えば、検体分注装置23のアーム23aと衝突することがある。この場合、制御部41は、自動分析装置1を異常停止した後、検体分注装置23を初期化し、以下のようにして異常停止を回復する。以下、検体分注装置23のアーム23aと障害物とが衝突した場合を例に、制御部41が実行する本発明の自動分析装置の異常停止回復方法を図2に示すフローチャートを参照して説明する。
【0045】
制御部41は、アーム23aの駆動位置を取得する(ステップS100)。このとき、制御部41は、光センサS11〜S14が検知し、制御部41は光センサS11〜S14から入力される検知信号をもとにアーム23aの駆動位置を取得する。この駆動位置の取得は、自動分析装置1が分析動作を開始すると、制御部41が分析終了に至るまで連続して実行する。次に、制御部41は、アーム23aが障害物と衝突したか否かを判定する(ステップS102)。ここで、アーム23aが障害物と衝突すると、ステッピングモータ23bが脱調し、アーム23aが所定のタイミングにあるべき位置からずれてしまう。このため、制御部41は、光センサS11〜S14からの出力をもとに検知したアーム23aの駆動位置とアーム23aの駆動タイミングとを比較し、アーム23aが障害物と衝突したか否かを判定する。
【0046】
判定の結果、アーム23aが障害物と衝突していない場合(ステップS102,No)、制御部41は、ステップS100に戻ってアーム23aの駆動位置を取得する工程を繰り返す。一方、判定の結果、アーム23aが障害物と衝突していた場合(ステップS102,Yes)、制御部41は、衝突を検知した検体分注装置23を含む全装置を異常停止させる(ステップS104)。
【0047】
次いで、制御部41は、制御部41は、アーム23aが障害物と衝突した検体分注装置23を異常停止中に初期化する(ステップS106)。次に、制御部41は、記憶部44から読み出した前記タイムチャートを参照し、検体分注装置23を他の被駆動装置の停止時の状態に同期させ、検体分注装置23を含む全装置の駆動を再開させる(ステップS108)。
【0048】
自動分析装置1は、以上のようにして異常停止回復方法を実行する。このとき、自動分析装置1の被駆動手段である検体移送装置21、検体分注装置23、免疫反応テーブル24、BFテーブル25、第1試薬庫26、……、第2反応管移送装置33におけるアーム23aと障害物との衝突に伴う装置全体の異常停止から作動再開に到るタイムチャートを図3に示す。
【0049】
図3に示すように、検体分注装置23のアーム23aが時刻T1に障害物と衝突すると、ステッピングモータ23bが脱調する。このため、制御部41は、光センサS11〜S14からの出力をもとにステッピングモータ23bの脱調を判定し、時刻T2に装置全体を異常停止させる。異常停止後、制御部41は、検体分注装置23を初期化し、他の装置と同期させた後、時刻T3に装置全体の駆動を再開させる。
【0050】
このように、自動分析装置1とその異常停止回復方法は、障害物と衝突した場合に、装置全体を停止させるが、障害物と衝突した検体分注装置23のみを初期化した後、他の装置と同期させて駆動を再開する。このため、自動分析装置1とその異常停止回復方法は、装置全体を初期化する場合に比べて、初期化に要する時間が短時間で済むので、分析途中の試薬や検体が無駄にならない。例えば、自動分析装置1は、障害物との衝突の可能性があるのは、被駆動手段である検体分注装置23、第1試薬分注装置28、第2試薬分注装置29、第1反応管移送装置32及び第2反応管移送装置33であるが、これらは、同じ被駆動手段であっても検体移送装置21、免疫反応テーブル24、BFテーブル25、第1試薬庫26、第2試薬庫27、酵素反応テーブル30に比べて初期化に要する時間が短時間で済む。
【0051】
ここで、第1反応管移送装置32及び第2反応管移送装置33は、図4に示すように、アーム32aの駆動経路L1とアーム33aの駆動経路L2が重なる干渉領域Aiを有している。このため、アーム32aやアーム33aの一方が、干渉領域Ai内で停止する場合がある。このため、干渉領域Aiを有している場合には、以下のようにして装置全体の駆動を再開させる。この場合の自動分析装置の異常停止回復方法を図5に示すフローチャートを参照して以下に説明する。
【0052】
制御部41は、第1反応管移送装置32及び第2反応管移送装置33のアーム32a,33aの駆動位置を取得する(ステップS200)。次に、制御部41は、アーム32a,33aが障害物と衝突したか否かを判定する(ステップS202)。この場合、制御部41は、光センサS21〜S24、光センサS31〜S34及び光センサA1,A2からの出力をもとに検知したアーム32a,33aの駆動位置とアーム32a,33aの駆動タイミングとを比較し、アーム32a,33aが障害物と衝突したか否かを判定する。
【0053】
判定の結果、アーム32a,33aが障害物と衝突していない場合(ステップS202,No)、制御部41は、ステップS200に戻ってアーム32a,33aの駆動位置を取得する工程を繰り返す。一方、判定の結果、アーム32a,33aの一方が障害物と衝突していた場合(ステップS202,Yes)、制御部41は、衝突を検知した第1反応管移送装置32又は第2反応管移送装置33を含む全装置を異常停止させる(ステップS204)。
【0054】
次いで、制御部41は、障害物と衝突したアームが干渉領域Ai内で停止しているか否かを判定する(ステップS206)。判定の結果、例えば、図6に示すように、衝突したアーム32aが干渉領域Ai内で停止していた場合(ステップS206,Yes)、制御部41は、ステッピングモータ32bを駆動し、図中に矢印で示すように、アーム32aを干渉領域Ai外へ移動させる(ステップS208)。このとき、制御部41は、光センサA1,A2からの出力をもとにアーム32aの干渉領域Ai外への移動を確認する。
【0055】
その後、制御部41は、アーム32aが障害物と衝突した第1反応管移送装置32を異常停止中に初期化する(ステップS210)。次に、制御部41は、記憶部44から読み出した前記タイムチャートを参照し、第1反応管移送装置32を他の被駆動装置の停止時の状態に同期させ、第1反応管移送装置32を含む全装置の駆動を再開させる(ステップS212)。
【0056】
一方、判定の結果、衝突したアーム32aが干渉領域Ai外で停止していた場合(ステップS206,No)、制御部41は、ステップS210へ移行し、以降の工程を実行することにより、装置全体の駆動を再開させる。
【図面の簡単な説明】
【0057】
【図1】自動分析装置の構成を示す模式図である。
【図2】本発明の自動分析装置の異常停止回復方法を説明するフローチャートである。
【図3】本発明の自動分析装置の異常停止回復方法を示すタイムチャートである。
【図4】2つの被駆動手段が、駆動経路の重なる干渉領域を有する場合を拡大して示す模式図である。
【図5】2つの被駆動手段が、駆動経路の重なる干渉領域を有する場合における自動分析装置の異常停止回復方法を説明するフローチャートである。
【図6】駆動経路が重なる干渉領域を有する被駆動手段が干渉領域内で異常停止した場合を拡大して示す模式図である。
【符号の説明】
【0058】
1 自動分析装置
2 測定機構
4 制御機構
10 反応管
21 検体移送装置
22 チップ格納部
23 検体分注装置
24 免疫反応テーブル
25 BFテーブル
26 第1試薬庫
27 第2試薬庫
28 第1試薬分注装置
29 第2試薬分注装置
30 酵素反応テーブル
31 測光装置
32 第1反応管移送装置
33 第2反応管移送装置
41 制御部
42 入力部
43 分析部
44 記憶部
45 出力部
46 送受信部
S11〜S14 光センサ
S21〜S24 光センサ
S31〜S34 光センサ
SA1,SA2 光センサ
【特許請求の範囲】
【請求項1】
駆動手段によって駆動される被駆動手段を複数備え、検体と試薬とを反応させて検体を分析する自動分析装置であって、
前記被駆動手段の駆動位置を検知する検知手段と、
前記複数の被駆動手段を制御すると共に、前記検知手段からの出力をもとに前記被駆動手段が障害物と衝突したか否かを判定する制御手段と、
を備え、前記制御手段は、前記被駆動手段が障害物と衝突したと判定した場合に、衝突した前記被駆動手段を他の被駆動手段と共に停止させ、衝突した当該被駆動手段を停止中に初期化した後、衝突した当該被駆動手段を前記他の被駆動手段と同期させて駆動を再開させることを特徴とする自動分析装置。
【請求項2】
衝突した前記被駆動手段は、ステッピングモータによって駆動されることを特徴とする請求項1に記載の自動分析装置。
【請求項3】
前記検知手段は、衝突した前記被駆動手段の駆動経路上に設置される光センサであることを特徴とする請求項1又は2に記載の自動分析装置。
【請求項4】
前記複数の被駆動手段は、互いに駆動経路が重なる干渉領域を有することを特徴とする請求項1〜3のいずれか一つに記載の自動分析装置。
【請求項5】
駆動手段によって駆動される被駆動手段を複数備え、検体と試薬とを反応させて検体を分析する自動分析装置の異常停止回復方法であって、
前記被駆動手段の駆動位置を取得する駆動位置取得工程と、
取得した駆動位置をもとに前記被駆動手段が障害物と衝突したか否かを判定する衝突判定工程と、
前記被駆動手段が障害物と衝突した場合に、衝突を検知した前記被駆動手段を他の被駆動手段と共に異常停止させる異常停止工程と、
衝突した当該被駆動手段を異常停止中に初期化する初期化工程と、
衝突した当該被駆動手段を前記他の被駆動手段と同期させて駆動を再開させる停止回復工程と、
を含むことを特徴とする自動分析装置の異常停止回復方法。
【請求項6】
前記複数の被駆動手段が互いに駆動経路が重なる干渉領域を有する場合、
障害物と衝突した前記被駆動手段が前記干渉領域内で停止しているか否かを判定する停止領域判定工程と、
前記干渉領域内で停止している前記被駆動手段を前記干渉領域外へ移動させる移動工程と、
を含むことを特徴とする請求項5に記載の自動分析装置の異常停止回復方法。
【請求項1】
駆動手段によって駆動される被駆動手段を複数備え、検体と試薬とを反応させて検体を分析する自動分析装置であって、
前記被駆動手段の駆動位置を検知する検知手段と、
前記複数の被駆動手段を制御すると共に、前記検知手段からの出力をもとに前記被駆動手段が障害物と衝突したか否かを判定する制御手段と、
を備え、前記制御手段は、前記被駆動手段が障害物と衝突したと判定した場合に、衝突した前記被駆動手段を他の被駆動手段と共に停止させ、衝突した当該被駆動手段を停止中に初期化した後、衝突した当該被駆動手段を前記他の被駆動手段と同期させて駆動を再開させることを特徴とする自動分析装置。
【請求項2】
衝突した前記被駆動手段は、ステッピングモータによって駆動されることを特徴とする請求項1に記載の自動分析装置。
【請求項3】
前記検知手段は、衝突した前記被駆動手段の駆動経路上に設置される光センサであることを特徴とする請求項1又は2に記載の自動分析装置。
【請求項4】
前記複数の被駆動手段は、互いに駆動経路が重なる干渉領域を有することを特徴とする請求項1〜3のいずれか一つに記載の自動分析装置。
【請求項5】
駆動手段によって駆動される被駆動手段を複数備え、検体と試薬とを反応させて検体を分析する自動分析装置の異常停止回復方法であって、
前記被駆動手段の駆動位置を取得する駆動位置取得工程と、
取得した駆動位置をもとに前記被駆動手段が障害物と衝突したか否かを判定する衝突判定工程と、
前記被駆動手段が障害物と衝突した場合に、衝突を検知した前記被駆動手段を他の被駆動手段と共に異常停止させる異常停止工程と、
衝突した当該被駆動手段を異常停止中に初期化する初期化工程と、
衝突した当該被駆動手段を前記他の被駆動手段と同期させて駆動を再開させる停止回復工程と、
を含むことを特徴とする自動分析装置の異常停止回復方法。
【請求項6】
前記複数の被駆動手段が互いに駆動経路が重なる干渉領域を有する場合、
障害物と衝突した前記被駆動手段が前記干渉領域内で停止しているか否かを判定する停止領域判定工程と、
前記干渉領域内で停止している前記被駆動手段を前記干渉領域外へ移動させる移動工程と、
を含むことを特徴とする請求項5に記載の自動分析装置の異常停止回復方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−164432(P2010−164432A)
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願番号】特願2009−7014(P2009−7014)
【出願日】平成21年1月15日(2009.1.15)
【出願人】(510005889)ベックマン・コールター・インコーポレーテッド (174)
【Fターム(参考)】
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願日】平成21年1月15日(2009.1.15)
【出願人】(510005889)ベックマン・コールター・インコーポレーテッド (174)
【Fターム(参考)】
[ Back to top ]