
自動分析装置及び方法
【課題】少なくとも1つの回転駆動軸を用いた水平駆動機構による分注プローブの位置決めを自動かつ短時間で実現する。
【解決手段】分注プローブと、分注プローブの水平移動機構として少なくとも1つの回転駆動軸を有する分注プローブ駆動機構と、位置合わせの際に分注プローブが接触する部分が円形状に形成された位置決め部材と、分注プローブと位置決め部材の接触を検出する接触検出機構と、制御部とを有する自動分析装置を使用する。制御部は、1つの駆動軸のみを駆動制御して、位置決め部材の円形状の部分に接触させ、次に、先に駆動した軸以外で1つの駆動軸のみを駆動制御して、位置決め部材の円形状の部分に接触させる。その後、制御部は、接触が検出された各点の位置情報等に基づいて、分注プローブを位置決めする所望の位置の中心点の位置情報を算出する。
【解決手段】分注プローブと、分注プローブの水平移動機構として少なくとも1つの回転駆動軸を有する分注プローブ駆動機構と、位置合わせの際に分注プローブが接触する部分が円形状に形成された位置決め部材と、分注プローブと位置決め部材の接触を検出する接触検出機構と、制御部とを有する自動分析装置を使用する。制御部は、1つの駆動軸のみを駆動制御して、位置決め部材の円形状の部分に接触させ、次に、先に駆動した軸以外で1つの駆動軸のみを駆動制御して、位置決め部材の円形状の部分に接触させる。その後、制御部は、接触が検出された各点の位置情報等に基づいて、分注プローブを位置決めする所望の位置の中心点の位置情報を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、分注駆動機構を有する自動分析装置に関する。
【背景技術】
【0002】
従来、試料プローブ又は試薬プローブを高精度に位置決めできる自動分析装置を提供するものがある(特許文献1を参照)。特許文献1には、プローブの固体若しくは液体への接近又は接触を検出する検出部を自動分析装置に設けることが記されている。また、同文献には、反応容器の中心位置の検出を可能とする中心位置検出部を有する治具を、反応容器に取り付けることが記されている。その上で、同文献には、移動中のプローブが、治具の中心位置検出部に接近又は接触したか否かを検出部で検出することにより、プローブを反応容器の中心に位置決めすることが記されている。
【0003】
また、プローブの先端を駆動してロケーターウェルの側壁と点接触させ、その接触を検出することにより、プローブの先端を位置決めするプローブ駆動装置を提供するものがある(特許文献2を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−300152号公報
【特許文献2】特許第3996851号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1は、回転駆動軸を含む2次元水平移動機構を備える分注駆動機構において、プローブを停止位置に自動的に位置決めする方法を記載する。しかし、この方法は、停止位置となる可能性のある場所が反応容器の中心位置か否かを順番に確認する。このため、確認に要する工程数が多くなる。
【0006】
また、特許文献2は、直線駆動軸のみによる2次元水平動機構を備えたプローブ駆動装置において、プローブの先端を自動的に位置決めする方法を記載する。しかし、この方法は、各直線駆動軸に沿ってプローブを駆動して円筒型のロケーターウェルの側壁との接触点を検出し、その中間点を各駆動軸方向の中心点とする。このため、回転駆動を含む分注駆動機構におけるプローブの位置決めには適用することができない。
【0007】
本発明は、少なくとも1つは回転駆動軸を含む2次元水平移動機構を備えた分注駆動機構において、プローブを自動的かつ短時間に位置決めできる自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前述した課題の解決のための一例として、本発明は、以下の構成を有している。
(1)試料又は試薬を所定量分注する分注プローブ
(2)分注プローブを水平方向に2次元的に移動させる2つ以上の駆動軸を有する分注駆動機構(ただし、駆動軸の少なくとも1つは回転駆動軸)
(3)分注プローブの吸引位置、吐出位置、洗浄位置の少なくともいずれかの位置に設置可能な又は配置される位置決め部材(位置合わせの際に前記分注プローブが接触する部分が、位置決め位置を中心とする円形状)
【0009】
(4)分注プローブと位置決め部材との接触を検出する接触検出機構
(5)分注プローブ駆動機構の2つ以上の駆動軸の1つのみを駆動制御して、位置決め部材の円形状の部分に接触させ、次に、先に駆動制御した駆動軸以外の1つの駆動軸のみを駆動制御して、位置決め部材の円形状の部分に接触させ、接触が検出された各点の位置情報、又は、接触が検出された各点の位置情報及び分注プローブを移動させた際の軌跡情報に基づいて、分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの中心点の位置情報を算出する制御部
【発明の効果】
【0010】
本発明によれば、2次元移動のための2以上の駆動軸のうち少なくとも1つが回転駆動軸である分注駆動機構を自動分析装置が搭載する場合にも、従来に比して少ない工程数かつ短時間で、分注プローブの位置を所定位置に自動的に位置決めすることができる。
上記した以外の課題、構成及び効果は以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0011】
【図1】形態例に係る自動分析装置の全体構成を示す図。
【図2】分注駆動機構の構成例を示す図。
【図3A】位置決め部材の断面構造例を示す図。
【図3B】位置決め部材の上面構造を示す図。
【図4】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理を説明するフローチャート。
【図5A】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図5B】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図5C】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図5D】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図5E】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図6】分注駆動機構が直線駆動軸と回転駆動軸を備える場合における複数の接触点を用いた位置決め処理を説明するフローチャート。
【図7A】分注駆動機構が直線駆動軸と回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図7B】分注駆動機構が直線駆動軸と回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図7C】分注駆動機構が直線駆動軸と回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図7D】分注駆動機構が直線駆動軸と回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図8】複数の接触点と分注プローブの移動軌跡による位置決め処理を説明するフローチャート。
【図9A】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図9B】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図9C】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図9D】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10A】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10B】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10C】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10D】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10E】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10F】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図11A】複数箇所の停止位置に対する位置決め処理の工程を説明する図。
【図11B】複数箇所の停止位置に対する位置決め処理の工程を説明する図。
【図11C】複数箇所の停止位置に対する位置決め処理の工程を説明する図。
【図11D】複数箇所の停止位置に対する位置決め処理の工程を説明する図。
【図11E】複数箇所の停止位置に対する位置決め処理の工程を説明する図。
【発明を実施するための形態】
【0012】
以下、図面に基づいて、本発明の実施の形態を説明する。なお、本発明の実施態様は、後述する形態例に限定されるものではなく、その技術思想の範囲において、種々の変形が可能である。
【0013】
[形態例1]
本実施例では、分注駆動機構が2つの回転駆動軸を備える場合に、複数の接触点の検出により分注プローブの位置決めを行う例を説明する。
【0014】
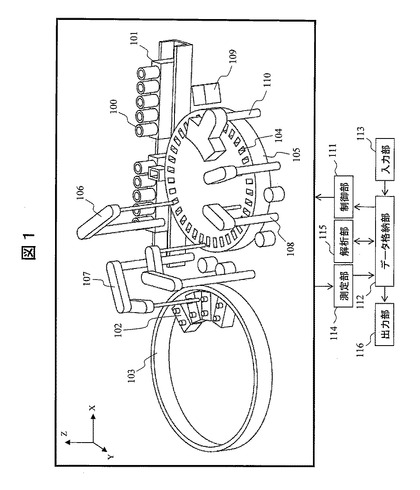
図1に、自動分析装置の全体構成例を示す。自動分析装置は、試料を収めた試料カップ100、試料カップ100を複数配置した試料ラック101、試薬を収めた試薬ボトル102、試薬ボトル102を複数配置した試薬ディスク103、試料と試薬とを混合させて反応液とするセル104、セル104を複数配置したセルディスク105、試料を試料カップ100内からセル104内に一定量移動できる試料分注機構106、試薬を試薬ボトル102内からセル104内に一定量移動することができる試薬分注機構107、試料と試薬をセル104内で攪拌し混合させる攪拌ユニット108、セル104内の反応液に光を照射し、得られる光を受光する測定ユニット109、セル104を洗浄する洗浄ユニット110、装置各部を制御する制御部111、各種データを蓄えたデータ格納部112、外部より必要なデータをデータ格納部112に入力できる入力部113、測定ユニット109で得られる光量から吸光度までを算出する測定部114、吸光度から成分量を割り出す解析部115、データを表示し外部に出力できる出力部116より構成される。
【0015】
なお、試薬ディスク103及びセルディスク105は、いずれもディスク形状であり、回転軸を中心に回転駆動される。なお、試薬ディスク103とセル104は、それぞれ試薬ディスク103及びセルディスク105の外周位置に配列される。
【0016】
試料の成分量の分析は、次のような手順で行われる。まず、試料カップ100内の試料を試料分注機構106によりセル104内に一定量分注する。次に、試薬ボトル102内の試薬を試薬分注機構107によりセル104内に一定量分注する。続いて、セル104内の試料と試薬とを攪拌ユニット108により攪拌し反応液とする。必要であれば、複数の試薬を、試薬分注機構107を用いてセル104内に追加的に分注する。これらの分注の際には、試料ラック101の搬送と、試薬ディスク103とセルディスク105の回転により、試料カップ100、試薬ボトル102、セル104を所定の位置に移動させる。反応が終了すると、洗浄ユニット110によりセル104内を洗浄し、次の分析を行う。反応液の吸光度は、測定ユニット109と測定部114により測定され、データ格納部112に吸光度データとして蓄積される。蓄積された吸光度データは、解析部115において、検量線データ及びランベルト・ベアーの法則に基づき解析される。この解析により、試料に含まれる成分量を分析できる。各部の制御・分析に必要なデータは、入力部113からデータ格納部112に入力される。各種データや解析結果は、出力部116により表示及び/又は出力される。
【0017】
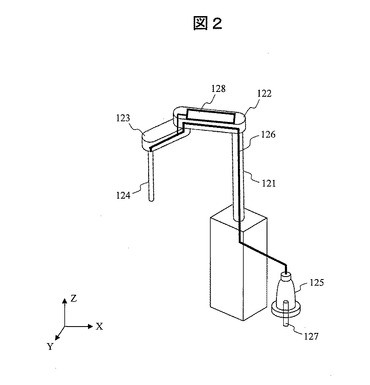
図2に、本形態例で使用する分注駆動機構の構成例を示す。この形態例の場合、上下に駆動可能なシャフト121の上端位置に、θ1アーム122の一端部が、XY面内で回転可能に取り付けられている。また、θ2アーム123の一端部は、θ1アーム122の自由端である先端位置に、XY面内で回転可能に取り付けられている。また、θ2アーム123の自由端である先端位置にはZ軸方向下方に延長するように分注プローブ124が取り付けられている。
【0018】
なお、分注プローブ124とシリンジ125は、チューブ126を介して接続されている。チューブ126は、シャフト121の台座からシャフト121、θ1アーム122、θ2アーム123を通り、分注プローブ124の一端側に接続されている。シリンジ125には、その内容積を可変するためのプランジャ127が移動可能に取り付けられている。プランジャ127の移動位置に応じ、分注プローブ124の先端からは試料又は試薬の吸引又は吐出が行われる。また、分注プローブ124には、静電容量方式の液面検知器128が接続されており、分注プローブ124が試料、試薬又は金属と接触したことを検出することができる。
【0019】
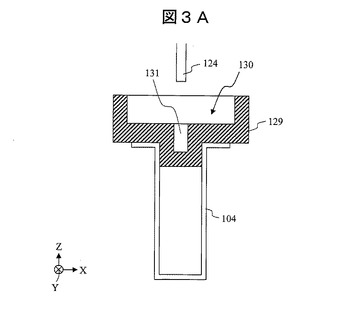
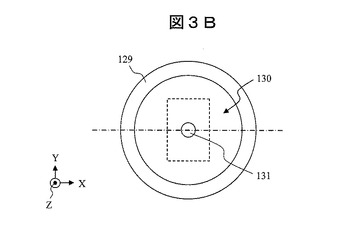
図3A及び図3Bに、位置決め部材129の構造例を示す。図3Aは、位置決め部材129と、当該位置決め部材129を取り付けたセル104の断面構造を示し、図3Bは、位置決め部材129の上面図を示している。位置決め部材129は、セル104の開口部分に着脱可能な治具である。位置決め部材129のうちセル104に取り付けられる部分の形状は、セル104に取り付け可能な形状であれば任意である。この形態例の場合、取り付け状態における位置決め部材129の上端側には、円筒構造130が設けられている。ここで、円筒構造130は、その中心軸が位置決め時の目標点と一致するように形成される。
【0020】
ここでは、着脱可能な治具を例に説明するが、例えば試薬ディスク103の試薬ボトル102を設置する場所に予め同様の構造が形成されていても、本明細書において提案する位置決め処理は実現可能である。
【0021】
位置決め部材129は金属製である。従って、分注プローブ124との接触を液面検知器128によって検出することができる。本形態例の場合、分注プローブ124と円筒構造130の内側面との接触を検出し、その位置情報に基づいて分注プローブ124の位置決めを行う。そのため、加工誤差や組み立て誤差があったとしても、円筒構造130は、分注プローブ124が最初の基準となる位置に移動されたときに、必ずその円筒の内部に位置するような大きさであることが望ましい。
【0022】
なお、本形態例の場合、静電容量方式による接触検出を例に説明するが、位置決め部材129と分注プローブ124を導通検知器(不図示)に予め接続させておき、接触による電気的導通を検出する方法を用いても2つの部材の接触を検出しても良い。
【0023】
また、図3A及びBに示すように、円筒構造130の中心部に、くぼみ131を形成しても良い。くぼみ131は、分注プローブ124の外径より大きい内径を有する位置決め確認用の治具として用いられる。例えば後述する位置決め処理の後、目標点として算出された位置で分注プローブ124を下降させ、分注プローブ124がくぼみ131に挿入されたか否かを検出することにより、分注プローブ124が正しく位置決めされたか否かを確認できるようにしても良い。
【0024】
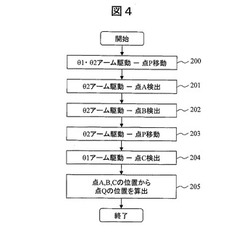
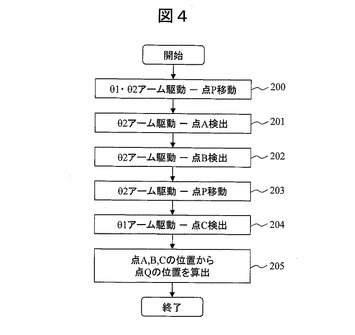
次に、図4及び図5A〜図5Eを使用して、本形態例に係る位置決め方法を説明する。すなわち、2つの回転駆動軸を有する水平移動機構を搭載する分注駆動機構による位置決め方法を説明する。ここで、図4は、本形態例に係る位置決め処理手法の概要を示すフローチャートである。図5A〜図5Eは、位置決め処理過程におけるθ1アーム122、θ2アーム123及び円筒構造130の位置関係を示している。位置決め処理は、制御部111が実行する。
【0025】
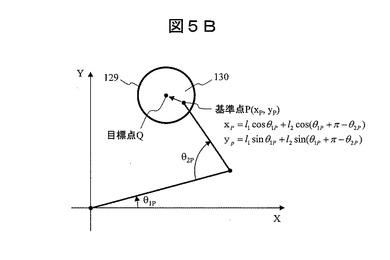
図5Aは、以下の説明で使用する座標系と各アームの初期位置及び寸法を示している。図に示すように、θ1アーム122の回転軸を座標原点とし、ホーム位置(初期位置)におけるθ1アーム122の軸方向をX軸とする。なお、X軸と直交する軸方向をY軸とする。なお、θ1アーム122のアーム長をl1 とし、θ2アーム123のアーム長をl2 とする。
【0026】
分注プローブ124を移動した後の各アームの角度は、駆動前のθ1アーム122及びθ2アーム123の初期角度と、当該初期角度に対する移動量(回転量)を与える各移動パルス数と、移動角分解能とから求めることができる。また、分注プローブ124の移動後の座標位置(x,y)は、図5Bに示すように、各アームの長さと各アームの角度により求めることができる。以降の工程でも同様にして、移動後の分注プローブ124の位置座標を求めることができる。当該座標位置の計算は、制御部111が実行する。
【0027】
まず、図5Bに示すように、分注プローブ124を初期位置から所定の基準点Pまで移動させる(処理200)。ここで、基準点Pは、部品の製造時の加工誤差や組み立て誤差がない場合の停止位置である。この分注プローブ124の水平移動は、θ1アーム122及びθ2アーム123のXY面内における回転駆動により実現される。分注プローブ124が基準点Pの座標位置に位置決めされると、制御部111は、シャフト121を降下させる。降下量は、降下完了後に、分注プローブ124をXY面内で移動させた際に、その先端部分が位置決め部材129の円筒構造130の内側面と接触できる高さまでである。
【0028】
本来、基準点Pは、位置決めすべき目標点Qと一致することが期待されている。しかし、位置決めすべき目標点Qは、加工誤差や組み立て誤差により基準点Pと一致しないことがある。その場合、基準点Pと目標点Qが一致するように、分注駆動機構の位置決めを再設定する必要がある。
【0029】
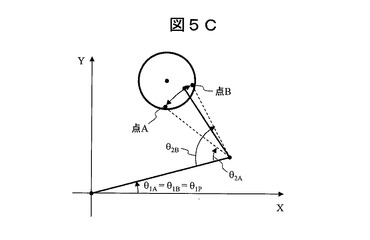
そこで、図5Cに示すように、θ2アーム123だけをXY面内で左右に回転駆動し、分注プローブ124を位置決め部材129の円筒構造130の内面に接触させる。図では左側に位置する接触点を点Aとし、右側に位置する接触点を点Bとする。そして、接触が検出されるたび、点A及びBの座標(xa,ya)及び(xb,yb)を算出する(処理201、202)。
【0030】
なお、点Aとの接触の確認により、制御部111は、位置決め部材129が取り付けられていること及び液面検知器128が正常動作していることを確認することができる。点Aとの接触が確認できない場合、制御部111は、以下の動作を実行することなく、位置決め動作を停止する。この際、出力部116を通じて位置決め動作が中止されたことを、操作者に報知することが望ましい。
【0031】
このように点A及びBの座標が検出されると、θ2アーム123だけを再び駆動し、分注プローブ124を基準点Pの位置に戻す(処理203)。この処理は必ずしも必須の処理ではないが、初期位置である基準点Pから次に検出する点Cの座標を算出することにより、点Cの座標の算出精度を高めることができる。
【0032】
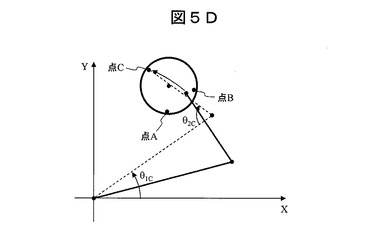
分注プローブ124が基準点Pに戻ると、図5Dに示すように、今度は、θ1アーム122だけを回転駆動し、分注プローブ124が位置決め部材129の円筒構造130の内面に接触する位置まで移動させる。この場合も、移動可能な方向は2つある。この形態例の場合には、点A及びBが存在する方向とは反対の方向に、すなわち点A及びBから遠ざけるように分注プローブ124を駆動する。このとき、接触が検出された点を点Cとする(処理204)。点A及びBの場合と同様に、制御部111は、点Cの座標(xc,yc)を算出する。
【0033】
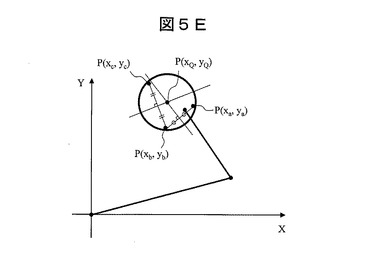
これら接触点(点A〜点C)の検出により、各点の座標(xa,ya)〜(xc,yc)が制御部111において算出される。これらの点A〜点Cは、円周上(より正確には、位置決め部材129の内壁から分注プローブ124の半径分だけ内側)の点である。このため、位置決め部材129の内壁面に相当する円周上の円の中心である目標点Qの座標は、これらの3点から計算により算出することができる(処理205)。この目標点Qが、分注プローブ114を位置決めすべき座標位置を与える。
【0034】
目標点Qの座標は、図5Eに示すように点A〜Cの中から任意の2点を2組選び、その垂直2等分線の交点を求めることにより算出することができる。垂直2等分線の式は、次式で与えることができる。
【0035】
【数1】

この2式を連立して解くと、点Qの座標(xQ,yQ)は、次式により算出できる。
【0036】
【数2】
【0037】
この他、最小二乗法を用いる方法によっても、円筒構造130の内側を構成する円の中心を求めることもができる。この場合、円周は、中心点(点Q)の座標(xQ,yQ)を用いて、以下の式で表すことができる。
【0038】
【数3】
ここで、次式のSを最小にするxQ、yQを求める。
【0039】
【数4】
【0040】
ここで、α=−2xQ、β=−2yQ、γ=xQ2+yQ2−r2とすると、前式のSは、次式で表すことができる。
【0041】
【数5】
【0042】
更に、
【数6】
となる。
【0043】
この行列を解き、α及びβの定義式を適用すると、以下の関係が算出される。
【数7】
【0044】
すなわち、点Qの座標(xQ,yQ)と、位置決め部材129の円筒半径が算出される。なお、算出された点Qの座標を図5Bの2式に代入し、θ1Qとθ2Qについて解くと、θ1アーム122とθ2アーム123の各基準位置に対するなす角を算出することができる。制御部111は、算出されたθ1Qとθ2Qに基づいて、θ1アーム122とθ2アーム123の駆動部(例えばモータ)を駆動し、それらを目標点Qに位置決めする。
【0045】
ここで、液面検知器128の誤動作や位置決め部材129の設置不良等により、点Qの座標又は位置決め部材の円筒半径の設計値と算出結果とが公差よりも大きく乖離している場合、制御部111は、自動分析装置の出力部116よりアラームを出力し、作業者に確認を促すことが望ましい。
【0046】
以上説明した処理機能の搭載により、分注駆動機構が2つの回転駆動軸を備える場合にも、分注プローブ124を正確かつ短時間に所定位置に自動的に位置決めすることができる。
【0047】
[形態例2]
形態例1の場合には、分注プローブ124の水平移動を2つの回転駆動軸の組み合わせにより実現しているが、本形態例の場合には、分注プローブ124の水平移動を1つの直線駆動軸と1つの回転駆動軸の組み合わせにより実現する場合について説明する。
【0048】
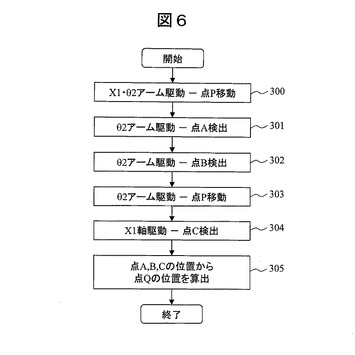
以下、図6及び図7A〜図7Dを使用して、本形態例に係る位置決め方法を説明する。ここで、図6は、本形態例に係る位置決め処理手法の概要を示すフローチャートである。図7A〜図7Dは、位置決め処理過程におけるリニアステージ141、θ2アーム123及び円筒構造130の位置関係を示している。
【0049】
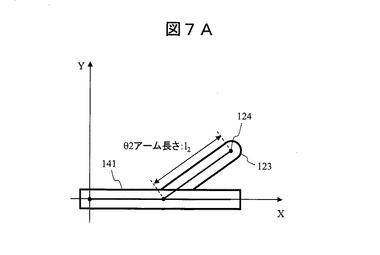
図7Aは、以下の説明で使用する座標系と各可動部の初期位置及び寸法を示している。図7Aの場合、座標系のX軸は、リニアステージ141の可動方向に一致させる。Y軸は、X軸と直交する軸方向に設定する。θ2アーム123は、リニアステージ141に設置され、その回転駆動軸はX軸上に設定される。θ2アーム123の回転軸の取付位置は、リニアガイド(X軸)に対するリニアステージ141の移動に伴って移動される。θ2アーム123のアーム長はl2 である。
【0050】
分注プローブ124を移動した後のθ2アーム123の回転軸の位置は、初期位置(X軸の原点)に対するリニアステージ141の移動量(例えば移動パルス数)として与えられる。また、θ2アーム123の角度は、X軸を初期角度(=0°)として与えられ、当該初期角度に対する移動量(回転量)を与える各移動パルス数と移動角分解能とにより与えられる。
【0051】
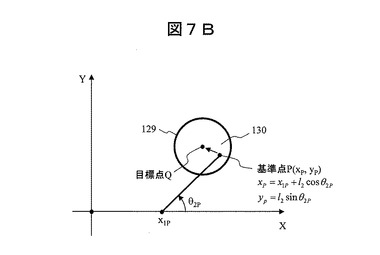
分注プローブ124の移動後の座標位置(x,y)は、図7Bに示すように、θ2アーム123の回転軸のX軸上の座標x1Pと、X軸に対するθ2アーム123の角度θ2Pにより求めることができる。以降の工程でも同様にして、移動後の分注プローブ124の位置座標を求めることができる。当該座標位置の計算は、制御部111が実行する。
【0052】
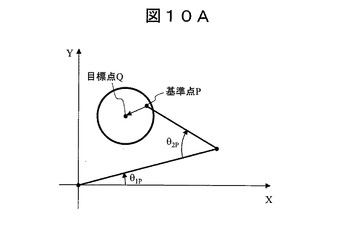
まず、図7Bに示すように、分注プローブ124を初期位置から所定の基準点Pまで移動させる(処理300)。ここで、基準点Pは、部品の製造時の加工誤差や組み立て誤差がない場合の停止位置である。この分注プローブ124の水平移動は、リニアステージ141及びθ2アーム123によるXY面内での水平移動と回転移動により実現される。分注プローブ124が基準点Pの座標位置に位置決めされると、制御部111は、シャフト121を降下させる。降下量は、降下完了後に、分注プローブ124をXY面内で移動させた際に、その先端部分が位置決め部材129の円筒構造130の内側面と接触できる高さまでである。
【0053】
この場合も、基準点Pは、位置決めすべき目標点Qと一致することが期待されている。しかし、位置決めすべき目標点Qは、加工誤差や組み立て誤差により基準点Pと一致しないことがある。その場合、基準点Pと目標点Qが一致するように、分注駆動機構の位置決めを再設定する必要がある。
【0054】
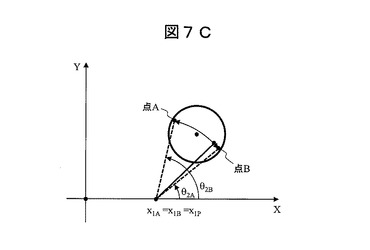
そこで、図7Cに示すように、θ2アーム123だけをXY面内で左右両方向に回転駆動し、分注プローブ124を位置決め部材129の円筒構造130の内面に接触させる。図では左側に位置する接触点を点Aとし、右側に位置する接触点を点Bとする。そして、接触が検出されるたび、点A及びBの座標(xa,ya)及び(xb,yb)を算出する(処理301、302)。
【0055】
なお、点Aとの接触の確認により、制御部111は、位置決め部材129が取り付けられていること及び液面検知器128が正常動作していることを確認することができる。点Aとの接触が確認できない場合、制御部111は、以下の動作を実行することなく、位置決め動作を停止する。この際、出力部116を通じて位置決め動作が中止されたことを操作者に報知することが望ましい。
【0056】
このように点A及びBの座標が検出されると、形態例1の場合と同様に、θ2アーム123だけを回転駆動し、分注プローブ124を基準点Pの位置に戻す(処理303)。この処理は必ずしも必須の処理ではないが、初期位置である基準点Pから次に検出する点Cの座標を算出することにより、点Cの座標の算出精度を高めることができる。
【0057】
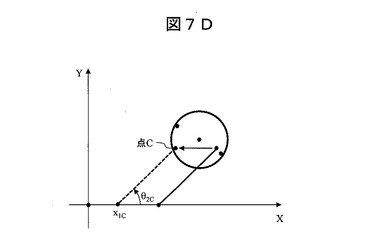
分注プローブ124が基準点Pに戻ると、図7Dに示すように、今度は、リニアステージ141だけを直線駆動し、分注プローブ124が位置決め部材129の円筒構造130の内面に接触する位置までX軸方向に移動させる。この場合も、移動可能な方向は2つある。この形態例の場合には、基準点Pと点Aの距離と基準点Pと点Bの距離のうち遠い方の点が存在する方向に分注プローブ124を駆動する。図7Dの場合は点Aの方向に移動する。このとき、接触が検出された点を点Cとする(処理304)。点A及びBの場合と同様に、制御部111は、点Cの座標(xc,yc)を算出する。
【0058】
これら接触点(点A〜点C)の検出により、各点の座標(xa,ya)〜(xc,yc)が制御部111において算出される。これらの点A〜点Cは、円周上(より正確には、位置決め部材129の内側面から分注プローブ124の半径分だけ内側)の点である。このため、位置決め部材129の内側面に相当する円周上の円の中心である点Qの座標は、これらの3点から計算により算出することができる(処理305)。この点Qが、分注プローブ114を位置決めすべき座標位置を与える。
【0059】
以上説明した処理機能の搭載により、分注駆動機構が1つの直線駆動軸と1つの回転駆動軸を備える場合にも、分注プローブ124を正確にかつ短時間に所定位置に自動的に位置決めすることができる。
【0060】
[形態例3]
本形態例の場合には、接触点だけでなく分注プローブ124の移動軌跡も考慮して位置決めを実行する例について説明する。なお、自動分析装置の装置構成は、形態例1の場合と同様であるものとする。すなわち、分注プローブ124の水平移動を2つの回転駆動軸の組み合わせにより実現するものとする。もっとも、本形態例において説明する処理方法は、形態例2に係る自動分析装置にも適用することができる。
【0061】
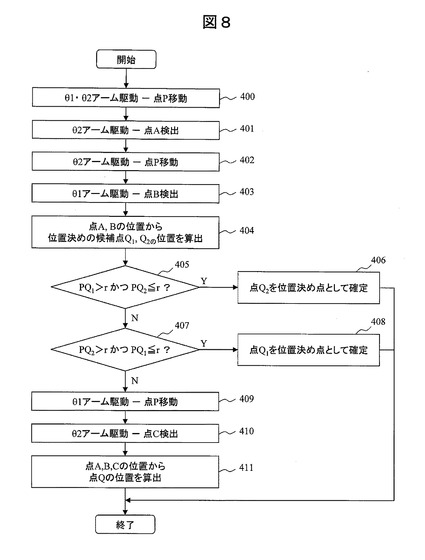
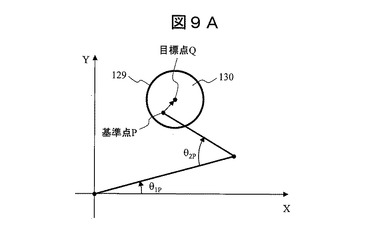
以下、図8、図9A〜図9D及び図10A〜図10Fを使用して、本形態例に係る位置決め方法を説明する。ここで、図8は、接触点と分注プローブ124の移動軌跡による位置決め処理のフローチャートである。図8に示す処理手順のうち処理405及び407に示す条件分岐部分が、分注プローブ124の移動軌跡を考慮した判定処理に対応し、当該判定時点で目標点Qを与える候補点を決定できるか否かを判定する。なお、図9A〜図9Dは、分注プローブ124の移動軌跡を考慮して位置決め候補点の一つを目標点Qと判定できる場合を示している。図10は、分注プローブ124の移動軌跡を考慮しても、位置決め候補点を目標点Qと決定できない場合を示している。
【0062】
まず、移動軌跡の考慮により位置決め候補点を目標点Qに決定できる場合について説明する。図9Aに示すように、θ1アーム122及びθ2アーム123を駆動し、分注プローブ124を基準点Pに移動させる。この後、位置決め部材129の円筒構造130の内側面に分注プローブ124が接触できる高さまでシャフト121を降下させる(処理400)。
【0063】
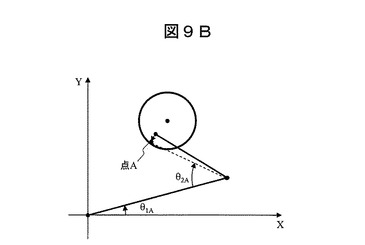
次に、図9Bに示すように、θ2アーム123のみを一方向に回転駆動し、分注プローブ124を位置決め部材129を構成する円筒部材130の内側面に接触させ、点Aの位置を検出する(処理401)。
【0064】
この後、θ2アーム123を逆方向に回転駆動し、分注プローブ124を基準点Pの位置へ戻す(処理402)。
【0065】
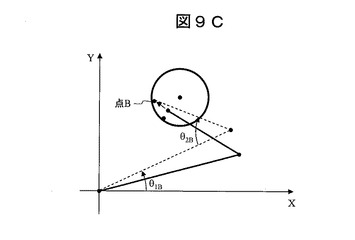
続いて、図9Cに示すように、θ1アーム122のみを一方向に回転駆動し、分注プローブ124を位置決め部材129の円筒構造130の内側面に接触させ、点Bの位置を検出する(処理403)。
【0066】
これまでの工程で位置決め部材129を構成する円筒構造130の内側面(内周)上の点A及び点Bの2点が検出される。ここで、円筒構造130の径rを考慮すると、位置決め目標点Qの候補点は、図9Dに示すように、点Q1 と点Q2 の2点となる(処理404)。内円に接する2点を通る円は2つ存在するためである。なお、形態例1の場合には、円周上の3点が検出されるため、目標点Qの座標点も一意に確定する。
【0067】
この段階で、制御部111は、基準点Pと点Aの距離(PQ1 )と基準点Pと点Bの距離(PQ2 )を算出し、それぞれを円筒構造130の半径rと比較する(処理405、処理407)。図9Dの場合、PQ1≦r、かつ、PQ2>rである。従って、処理405で否定結果が得られ、処理407で肯定結果が得られる。この場合、制御部111は、処理408に進み、候補点であるQ1 の方を目標点Qに確定する。
【0068】
これは、点Q2 を中心とする円筒構造130を考える場合、基準点Pが円筒構造130の内部から外れており、分注プローブ124の軌跡を考慮した場合、点Q2 は位置決めの目標点Qではあり得ないためである。従って、この場合、前述の通り、点Q1 を位置決め目標点Qとして確定することができる。なお、処理405で肯定結果が得られた場合、制御部111は処理406に進み、候補点であるQ2 の方を目標点Qに確定する。
【0069】
次に、移動軌跡を考慮しても位置決め候補点を特定できない場合について説明する。図10A〜図10Dは、前述した処理400〜404の処理に当たる。従って、ここまでの処理は、前述の例と同様の手順となる。
【0070】
ただし、図10Dの例は、PQ1 ≦r、かつ、PQ2≦rである。従って、処理405及び処理407のいずれにおいても否定結果となる。すなわち、分注プローブ124の移動軌跡を考慮したとしても、この時点では、点Q1 と点Q2 のいずれもが目標点Qとなる可能性がある。
【0071】
この場合、制御部111は、θ1アーム122のみを処理403とは逆方向に回転駆動して分注プローブ124を基準点Pに戻し、その後、θ2アーム123のみを処理401とは逆方向に回転駆動して3番目の点Cを検出する(処理409、410)。
【0072】
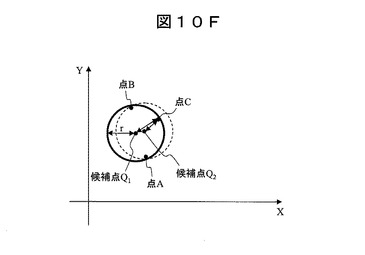
この時点で3つの点A、B及びCを通る円は1つだけに確定する。よって、これらの3点から目標点Qの座標を算出する(処理411)。ここで、目標点Qの座標の算出方法には、図10Fに示すように、候補点Q1 と点Cの距離CQ1 及び候補点Q2 と点Cの距離CQ2 のいずれが径rと一致するか否かによって判定する方法と形態例1のように点A〜Cの座標から目標点Qの座標を算出する方法のいずれを用いても良い。
【0073】
[形態例4]
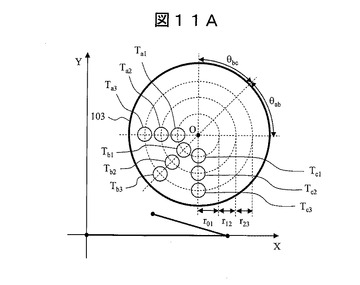
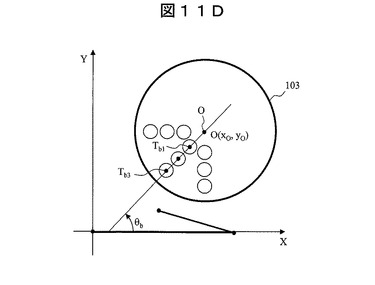
本形態例の場合には、複数の停止位置に対して分注プローブ124を位置決めする場合の処理について説明する。ここでは、図11A〜図11Eを用いて、当該処理を説明する。同図は、試薬ディスク103上に、9個の吸引位置Ta1〜Tc3を設ける場合を示している。一般に、試薬ディスク103のように一体構造物上に設けられる吸引位置Ta1〜Tc3の相対位置誤差は小さく、試薬ディスク103と試薬分注機構107のように異なる機構間の位置関係には誤差が多く含まれる場合が多い。
【0074】
吸引位置Ta1〜Tc3の相対位置誤差が、位置決めする際に許容される誤差よりも十分に小さい場合、9箇所ある吸引位置のうち2箇所を正確に位置決めすることができれば、残り7箇所の位置決めは計算により実行することができる。以下、その方法を、図11A〜図11Eを用いて説明する。
【0075】
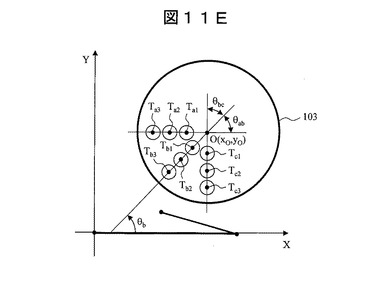
図11Aは、試薬ディスク103上に設けられた9箇所の吸引位置の配置例を示している。図11Aの場合、9箇所の吸引位置は、試薬ディスク103の中心Oから放射状に延びる3つの列に分散して配列されている。この例の場合、各列上には、吸引位置が3個ずつ配置されている。すなわち、Ta1〜Ta3の3つで構成される吸引位置列と、Tb1〜Tb3の3つで構成される吸引位置列と、Tc1〜Tc3の3つで構成される吸引位置列とに分散されている。なお、各列を構成する3つの吸引位置は、他の吸引位置列上で対応する各吸引位置と同心円上に配置されている。
【0076】
なお、この形態例の場合、各吸引位置列のなす角θab及びθbcと、同じ吸引位置列上に並ぶ吸引位置間の距離r01〜r23が分かっているものとする。
【0077】
この形態例では、3つの吸引位置列のうち1つに着目し、当該吸引位置列上の2点についてのみ分注プローブ124の位置決め処理を実際に実行する。なお、相対位置誤差を最小にするため、ここでは3つの吸引位置列のうち真ん中に位置する吸引位置列に注目する。
【0078】
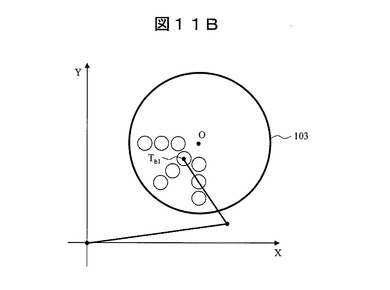
まず、制御部111は、図11Bに示すように、最も内側に配置される吸引位置Tb1に対し、分注プローブ124を位置決めし、その位置座標を算出する。勿論、当該位置決めに際しては、前述した形態例1又は3の処理方法を適用する。勿論、分注駆動機構が形態例2に対応する場合には、形態例に記載した処理方法を適用する。
【0079】
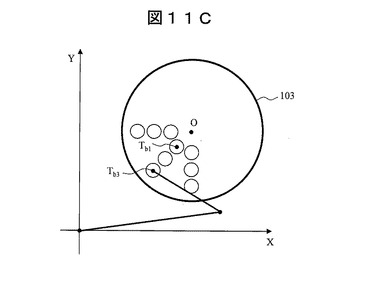
次に、制御部111は、図11Cに示すように、吸引位置Tb1と同列の最も外側に配置される吸引位置Tb3に対し、分注プローブ124を位置決めし、その位置座標を算出する。この後、制御部111は、図11Dに示すように、吸引位置Tb1とTb3の座標と距離r01〜r23の関係に基づいて、同列上に位置する3個の吸引位置Tb1〜Tb3を結ぶ直線とx軸とのなす角θbと、中心Oの座標O(x0,y0)と、吸引位置Tb2の座標を算出する。
【0080】
さらに、制御部111は、図11Eに示すように、先に位置合わせが終了した吸引位置列の左右に位置する吸引位置列とのなす角θab及びθbcに基づいて、各吸引位置列に対応する3つの吸引位置Ta1〜Ta3及びTc1〜Tc3の座標を算出する。以上の通り、複数の吸引位置について位置決めが必要な場合でも、相互間の位置関係に関する情報を使用できる場合には、当該位置関係から要求される必要最小限(この形態例の場合は2箇所)の吸引位置Tb1及びTb3に対してのみ実際の位置決め処理を実行すれば、残りの吸引位置の位置決めは計算処理により実行することができる。
【0081】
なお、本形態例の場合、同じ列上に配列される3つの吸引位置のうち最内周と最外周の2点に位置する吸引位置について実際の位置決め処理を行っているが、同じ列上に位置する任意の2点について実際の位置決めを行っても良い。
【0082】
[他の形態例]
前述の形態例においては、位置決め部材129のうち分注プローブ124と接触する部分の形状が円筒構造130である場合について説明した。しかし、前述の形態例で説明した処理手法の適用に必要な条件は、内側面がXY面内において円形状であることである。従って、外側面の形状は必ずしも円である必要はない。すなわち、円筒構造130である必要はない。
【0083】
また、位置決め部材129の外側面との接触を利用して位置決めを実行する場合には、位置決め部材129のうち分注プローブ124の接触する外側面の形状が、XY面内において円形状であれば良い。すなわち、分注プローブ124が実際に接触する部分の形状は円柱形状でも良い。この場合も、外側面との2点以上の接触点について座標を算出することにより、位置決め部材129の中心座標を算出することができる。
【0084】
なお、本発明は上述した形態例に限定されるものでなく、様々な変形例が含まれる。例えば、上述した形態例は、本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある形態例の一部を他の形態例の構成に置き換えることが可能であり、また、ある形態例の構成に他の形態例の構成を加えることも可能である。また、各形態例の構成の一部について、他の構成を追加、削除又は置換することも可能である。
【0085】
また、上述した各構成、機能、処理部、処理手段等は、それらの一部又は全部を、例えば集積回路その他のハードウェアとして実現しても良い。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することにより実現しても良い。すなわち、ソフトウェアとして実現しても良い。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリやハードディスク、SSD(Solid State Drive)等の記憶装置、ICカード、SDカード、DVD等の記憶媒体に格納することができる。
【0086】
また、制御線や情報線は、説明上必要と考えられるものを示すものであり、製品上必要な全ての制御線や情報線を表すものでない。実際にはほとんど全ての構成が相互に接続されていると考えて良い。
【符号の説明】
【0087】
100…試料カップ、101…試料ラック、102…試薬ボトル、103…試薬ディスク、104…セル、105…セルディスク、106…試料分注機構、107…試薬分注機構、108…撹拌ユニット、109…測定ユニット、110…洗浄ユニット、111…制御部、112…データ格納部、113…入力部、114…測定部、115…解析部、116…出力部、121…シャフト、122…θ1アーム、123…θ2アーム、124…分注プローブ、125…プランジャ、126…シャフト、127…プランジャ、128…液面検知器、129…位置決め部材、130…円筒構造、131…くぼみ。
【技術分野】
【0001】
本発明は、分注駆動機構を有する自動分析装置に関する。
【背景技術】
【0002】
従来、試料プローブ又は試薬プローブを高精度に位置決めできる自動分析装置を提供するものがある(特許文献1を参照)。特許文献1には、プローブの固体若しくは液体への接近又は接触を検出する検出部を自動分析装置に設けることが記されている。また、同文献には、反応容器の中心位置の検出を可能とする中心位置検出部を有する治具を、反応容器に取り付けることが記されている。その上で、同文献には、移動中のプローブが、治具の中心位置検出部に接近又は接触したか否かを検出部で検出することにより、プローブを反応容器の中心に位置決めすることが記されている。
【0003】
また、プローブの先端を駆動してロケーターウェルの側壁と点接触させ、その接触を検出することにより、プローブの先端を位置決めするプローブ駆動装置を提供するものがある(特許文献2を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−300152号公報
【特許文献2】特許第3996851号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1は、回転駆動軸を含む2次元水平移動機構を備える分注駆動機構において、プローブを停止位置に自動的に位置決めする方法を記載する。しかし、この方法は、停止位置となる可能性のある場所が反応容器の中心位置か否かを順番に確認する。このため、確認に要する工程数が多くなる。
【0006】
また、特許文献2は、直線駆動軸のみによる2次元水平動機構を備えたプローブ駆動装置において、プローブの先端を自動的に位置決めする方法を記載する。しかし、この方法は、各直線駆動軸に沿ってプローブを駆動して円筒型のロケーターウェルの側壁との接触点を検出し、その中間点を各駆動軸方向の中心点とする。このため、回転駆動を含む分注駆動機構におけるプローブの位置決めには適用することができない。
【0007】
本発明は、少なくとも1つは回転駆動軸を含む2次元水平移動機構を備えた分注駆動機構において、プローブを自動的かつ短時間に位置決めできる自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前述した課題の解決のための一例として、本発明は、以下の構成を有している。
(1)試料又は試薬を所定量分注する分注プローブ
(2)分注プローブを水平方向に2次元的に移動させる2つ以上の駆動軸を有する分注駆動機構(ただし、駆動軸の少なくとも1つは回転駆動軸)
(3)分注プローブの吸引位置、吐出位置、洗浄位置の少なくともいずれかの位置に設置可能な又は配置される位置決め部材(位置合わせの際に前記分注プローブが接触する部分が、位置決め位置を中心とする円形状)
【0009】
(4)分注プローブと位置決め部材との接触を検出する接触検出機構
(5)分注プローブ駆動機構の2つ以上の駆動軸の1つのみを駆動制御して、位置決め部材の円形状の部分に接触させ、次に、先に駆動制御した駆動軸以外の1つの駆動軸のみを駆動制御して、位置決め部材の円形状の部分に接触させ、接触が検出された各点の位置情報、又は、接触が検出された各点の位置情報及び分注プローブを移動させた際の軌跡情報に基づいて、分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの中心点の位置情報を算出する制御部
【発明の効果】
【0010】
本発明によれば、2次元移動のための2以上の駆動軸のうち少なくとも1つが回転駆動軸である分注駆動機構を自動分析装置が搭載する場合にも、従来に比して少ない工程数かつ短時間で、分注プローブの位置を所定位置に自動的に位置決めすることができる。
上記した以外の課題、構成及び効果は以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0011】
【図1】形態例に係る自動分析装置の全体構成を示す図。
【図2】分注駆動機構の構成例を示す図。
【図3A】位置決め部材の断面構造例を示す図。
【図3B】位置決め部材の上面構造を示す図。
【図4】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理を説明するフローチャート。
【図5A】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図5B】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図5C】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図5D】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図5E】分注駆動機構が2つの回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図6】分注駆動機構が直線駆動軸と回転駆動軸を備える場合における複数の接触点を用いた位置決め処理を説明するフローチャート。
【図7A】分注駆動機構が直線駆動軸と回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図7B】分注駆動機構が直線駆動軸と回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図7C】分注駆動機構が直線駆動軸と回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図7D】分注駆動機構が直線駆動軸と回転駆動軸を備える場合における複数の接触点を用いた位置決め処理の工程を説明する図。
【図8】複数の接触点と分注プローブの移動軌跡による位置決め処理を説明するフローチャート。
【図9A】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図9B】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図9C】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図9D】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10A】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10B】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10C】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10D】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10E】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図10F】複数の接触点と分注プローブの移動軌跡による位置決め処理の工程を説明する図。
【図11A】複数箇所の停止位置に対する位置決め処理の工程を説明する図。
【図11B】複数箇所の停止位置に対する位置決め処理の工程を説明する図。
【図11C】複数箇所の停止位置に対する位置決め処理の工程を説明する図。
【図11D】複数箇所の停止位置に対する位置決め処理の工程を説明する図。
【図11E】複数箇所の停止位置に対する位置決め処理の工程を説明する図。
【発明を実施するための形態】
【0012】
以下、図面に基づいて、本発明の実施の形態を説明する。なお、本発明の実施態様は、後述する形態例に限定されるものではなく、その技術思想の範囲において、種々の変形が可能である。
【0013】
[形態例1]
本実施例では、分注駆動機構が2つの回転駆動軸を備える場合に、複数の接触点の検出により分注プローブの位置決めを行う例を説明する。
【0014】
図1に、自動分析装置の全体構成例を示す。自動分析装置は、試料を収めた試料カップ100、試料カップ100を複数配置した試料ラック101、試薬を収めた試薬ボトル102、試薬ボトル102を複数配置した試薬ディスク103、試料と試薬とを混合させて反応液とするセル104、セル104を複数配置したセルディスク105、試料を試料カップ100内からセル104内に一定量移動できる試料分注機構106、試薬を試薬ボトル102内からセル104内に一定量移動することができる試薬分注機構107、試料と試薬をセル104内で攪拌し混合させる攪拌ユニット108、セル104内の反応液に光を照射し、得られる光を受光する測定ユニット109、セル104を洗浄する洗浄ユニット110、装置各部を制御する制御部111、各種データを蓄えたデータ格納部112、外部より必要なデータをデータ格納部112に入力できる入力部113、測定ユニット109で得られる光量から吸光度までを算出する測定部114、吸光度から成分量を割り出す解析部115、データを表示し外部に出力できる出力部116より構成される。
【0015】
なお、試薬ディスク103及びセルディスク105は、いずれもディスク形状であり、回転軸を中心に回転駆動される。なお、試薬ディスク103とセル104は、それぞれ試薬ディスク103及びセルディスク105の外周位置に配列される。
【0016】
試料の成分量の分析は、次のような手順で行われる。まず、試料カップ100内の試料を試料分注機構106によりセル104内に一定量分注する。次に、試薬ボトル102内の試薬を試薬分注機構107によりセル104内に一定量分注する。続いて、セル104内の試料と試薬とを攪拌ユニット108により攪拌し反応液とする。必要であれば、複数の試薬を、試薬分注機構107を用いてセル104内に追加的に分注する。これらの分注の際には、試料ラック101の搬送と、試薬ディスク103とセルディスク105の回転により、試料カップ100、試薬ボトル102、セル104を所定の位置に移動させる。反応が終了すると、洗浄ユニット110によりセル104内を洗浄し、次の分析を行う。反応液の吸光度は、測定ユニット109と測定部114により測定され、データ格納部112に吸光度データとして蓄積される。蓄積された吸光度データは、解析部115において、検量線データ及びランベルト・ベアーの法則に基づき解析される。この解析により、試料に含まれる成分量を分析できる。各部の制御・分析に必要なデータは、入力部113からデータ格納部112に入力される。各種データや解析結果は、出力部116により表示及び/又は出力される。
【0017】
図2に、本形態例で使用する分注駆動機構の構成例を示す。この形態例の場合、上下に駆動可能なシャフト121の上端位置に、θ1アーム122の一端部が、XY面内で回転可能に取り付けられている。また、θ2アーム123の一端部は、θ1アーム122の自由端である先端位置に、XY面内で回転可能に取り付けられている。また、θ2アーム123の自由端である先端位置にはZ軸方向下方に延長するように分注プローブ124が取り付けられている。
【0018】
なお、分注プローブ124とシリンジ125は、チューブ126を介して接続されている。チューブ126は、シャフト121の台座からシャフト121、θ1アーム122、θ2アーム123を通り、分注プローブ124の一端側に接続されている。シリンジ125には、その内容積を可変するためのプランジャ127が移動可能に取り付けられている。プランジャ127の移動位置に応じ、分注プローブ124の先端からは試料又は試薬の吸引又は吐出が行われる。また、分注プローブ124には、静電容量方式の液面検知器128が接続されており、分注プローブ124が試料、試薬又は金属と接触したことを検出することができる。
【0019】
図3A及び図3Bに、位置決め部材129の構造例を示す。図3Aは、位置決め部材129と、当該位置決め部材129を取り付けたセル104の断面構造を示し、図3Bは、位置決め部材129の上面図を示している。位置決め部材129は、セル104の開口部分に着脱可能な治具である。位置決め部材129のうちセル104に取り付けられる部分の形状は、セル104に取り付け可能な形状であれば任意である。この形態例の場合、取り付け状態における位置決め部材129の上端側には、円筒構造130が設けられている。ここで、円筒構造130は、その中心軸が位置決め時の目標点と一致するように形成される。
【0020】
ここでは、着脱可能な治具を例に説明するが、例えば試薬ディスク103の試薬ボトル102を設置する場所に予め同様の構造が形成されていても、本明細書において提案する位置決め処理は実現可能である。
【0021】
位置決め部材129は金属製である。従って、分注プローブ124との接触を液面検知器128によって検出することができる。本形態例の場合、分注プローブ124と円筒構造130の内側面との接触を検出し、その位置情報に基づいて分注プローブ124の位置決めを行う。そのため、加工誤差や組み立て誤差があったとしても、円筒構造130は、分注プローブ124が最初の基準となる位置に移動されたときに、必ずその円筒の内部に位置するような大きさであることが望ましい。
【0022】
なお、本形態例の場合、静電容量方式による接触検出を例に説明するが、位置決め部材129と分注プローブ124を導通検知器(不図示)に予め接続させておき、接触による電気的導通を検出する方法を用いても2つの部材の接触を検出しても良い。
【0023】
また、図3A及びBに示すように、円筒構造130の中心部に、くぼみ131を形成しても良い。くぼみ131は、分注プローブ124の外径より大きい内径を有する位置決め確認用の治具として用いられる。例えば後述する位置決め処理の後、目標点として算出された位置で分注プローブ124を下降させ、分注プローブ124がくぼみ131に挿入されたか否かを検出することにより、分注プローブ124が正しく位置決めされたか否かを確認できるようにしても良い。
【0024】
次に、図4及び図5A〜図5Eを使用して、本形態例に係る位置決め方法を説明する。すなわち、2つの回転駆動軸を有する水平移動機構を搭載する分注駆動機構による位置決め方法を説明する。ここで、図4は、本形態例に係る位置決め処理手法の概要を示すフローチャートである。図5A〜図5Eは、位置決め処理過程におけるθ1アーム122、θ2アーム123及び円筒構造130の位置関係を示している。位置決め処理は、制御部111が実行する。
【0025】
図5Aは、以下の説明で使用する座標系と各アームの初期位置及び寸法を示している。図に示すように、θ1アーム122の回転軸を座標原点とし、ホーム位置(初期位置)におけるθ1アーム122の軸方向をX軸とする。なお、X軸と直交する軸方向をY軸とする。なお、θ1アーム122のアーム長をl1 とし、θ2アーム123のアーム長をl2 とする。
【0026】
分注プローブ124を移動した後の各アームの角度は、駆動前のθ1アーム122及びθ2アーム123の初期角度と、当該初期角度に対する移動量(回転量)を与える各移動パルス数と、移動角分解能とから求めることができる。また、分注プローブ124の移動後の座標位置(x,y)は、図5Bに示すように、各アームの長さと各アームの角度により求めることができる。以降の工程でも同様にして、移動後の分注プローブ124の位置座標を求めることができる。当該座標位置の計算は、制御部111が実行する。
【0027】
まず、図5Bに示すように、分注プローブ124を初期位置から所定の基準点Pまで移動させる(処理200)。ここで、基準点Pは、部品の製造時の加工誤差や組み立て誤差がない場合の停止位置である。この分注プローブ124の水平移動は、θ1アーム122及びθ2アーム123のXY面内における回転駆動により実現される。分注プローブ124が基準点Pの座標位置に位置決めされると、制御部111は、シャフト121を降下させる。降下量は、降下完了後に、分注プローブ124をXY面内で移動させた際に、その先端部分が位置決め部材129の円筒構造130の内側面と接触できる高さまでである。
【0028】
本来、基準点Pは、位置決めすべき目標点Qと一致することが期待されている。しかし、位置決めすべき目標点Qは、加工誤差や組み立て誤差により基準点Pと一致しないことがある。その場合、基準点Pと目標点Qが一致するように、分注駆動機構の位置決めを再設定する必要がある。
【0029】
そこで、図5Cに示すように、θ2アーム123だけをXY面内で左右に回転駆動し、分注プローブ124を位置決め部材129の円筒構造130の内面に接触させる。図では左側に位置する接触点を点Aとし、右側に位置する接触点を点Bとする。そして、接触が検出されるたび、点A及びBの座標(xa,ya)及び(xb,yb)を算出する(処理201、202)。
【0030】
なお、点Aとの接触の確認により、制御部111は、位置決め部材129が取り付けられていること及び液面検知器128が正常動作していることを確認することができる。点Aとの接触が確認できない場合、制御部111は、以下の動作を実行することなく、位置決め動作を停止する。この際、出力部116を通じて位置決め動作が中止されたことを、操作者に報知することが望ましい。
【0031】
このように点A及びBの座標が検出されると、θ2アーム123だけを再び駆動し、分注プローブ124を基準点Pの位置に戻す(処理203)。この処理は必ずしも必須の処理ではないが、初期位置である基準点Pから次に検出する点Cの座標を算出することにより、点Cの座標の算出精度を高めることができる。
【0032】
分注プローブ124が基準点Pに戻ると、図5Dに示すように、今度は、θ1アーム122だけを回転駆動し、分注プローブ124が位置決め部材129の円筒構造130の内面に接触する位置まで移動させる。この場合も、移動可能な方向は2つある。この形態例の場合には、点A及びBが存在する方向とは反対の方向に、すなわち点A及びBから遠ざけるように分注プローブ124を駆動する。このとき、接触が検出された点を点Cとする(処理204)。点A及びBの場合と同様に、制御部111は、点Cの座標(xc,yc)を算出する。
【0033】
これら接触点(点A〜点C)の検出により、各点の座標(xa,ya)〜(xc,yc)が制御部111において算出される。これらの点A〜点Cは、円周上(より正確には、位置決め部材129の内壁から分注プローブ124の半径分だけ内側)の点である。このため、位置決め部材129の内壁面に相当する円周上の円の中心である目標点Qの座標は、これらの3点から計算により算出することができる(処理205)。この目標点Qが、分注プローブ114を位置決めすべき座標位置を与える。
【0034】
目標点Qの座標は、図5Eに示すように点A〜Cの中から任意の2点を2組選び、その垂直2等分線の交点を求めることにより算出することができる。垂直2等分線の式は、次式で与えることができる。
【0035】
【数1】
この2式を連立して解くと、点Qの座標(xQ,yQ)は、次式により算出できる。
【0036】
【数2】
【0037】
この他、最小二乗法を用いる方法によっても、円筒構造130の内側を構成する円の中心を求めることもができる。この場合、円周は、中心点(点Q)の座標(xQ,yQ)を用いて、以下の式で表すことができる。
【0038】
【数3】
ここで、次式のSを最小にするxQ、yQを求める。
【0039】
【数4】
【0040】
ここで、α=−2xQ、β=−2yQ、γ=xQ2+yQ2−r2とすると、前式のSは、次式で表すことができる。
【0041】
【数5】
【0042】
更に、
【数6】
となる。
【0043】
この行列を解き、α及びβの定義式を適用すると、以下の関係が算出される。
【数7】
【0044】
すなわち、点Qの座標(xQ,yQ)と、位置決め部材129の円筒半径が算出される。なお、算出された点Qの座標を図5Bの2式に代入し、θ1Qとθ2Qについて解くと、θ1アーム122とθ2アーム123の各基準位置に対するなす角を算出することができる。制御部111は、算出されたθ1Qとθ2Qに基づいて、θ1アーム122とθ2アーム123の駆動部(例えばモータ)を駆動し、それらを目標点Qに位置決めする。
【0045】
ここで、液面検知器128の誤動作や位置決め部材129の設置不良等により、点Qの座標又は位置決め部材の円筒半径の設計値と算出結果とが公差よりも大きく乖離している場合、制御部111は、自動分析装置の出力部116よりアラームを出力し、作業者に確認を促すことが望ましい。
【0046】
以上説明した処理機能の搭載により、分注駆動機構が2つの回転駆動軸を備える場合にも、分注プローブ124を正確かつ短時間に所定位置に自動的に位置決めすることができる。
【0047】
[形態例2]
形態例1の場合には、分注プローブ124の水平移動を2つの回転駆動軸の組み合わせにより実現しているが、本形態例の場合には、分注プローブ124の水平移動を1つの直線駆動軸と1つの回転駆動軸の組み合わせにより実現する場合について説明する。
【0048】
以下、図6及び図7A〜図7Dを使用して、本形態例に係る位置決め方法を説明する。ここで、図6は、本形態例に係る位置決め処理手法の概要を示すフローチャートである。図7A〜図7Dは、位置決め処理過程におけるリニアステージ141、θ2アーム123及び円筒構造130の位置関係を示している。
【0049】
図7Aは、以下の説明で使用する座標系と各可動部の初期位置及び寸法を示している。図7Aの場合、座標系のX軸は、リニアステージ141の可動方向に一致させる。Y軸は、X軸と直交する軸方向に設定する。θ2アーム123は、リニアステージ141に設置され、その回転駆動軸はX軸上に設定される。θ2アーム123の回転軸の取付位置は、リニアガイド(X軸)に対するリニアステージ141の移動に伴って移動される。θ2アーム123のアーム長はl2 である。
【0050】
分注プローブ124を移動した後のθ2アーム123の回転軸の位置は、初期位置(X軸の原点)に対するリニアステージ141の移動量(例えば移動パルス数)として与えられる。また、θ2アーム123の角度は、X軸を初期角度(=0°)として与えられ、当該初期角度に対する移動量(回転量)を与える各移動パルス数と移動角分解能とにより与えられる。
【0051】
分注プローブ124の移動後の座標位置(x,y)は、図7Bに示すように、θ2アーム123の回転軸のX軸上の座標x1Pと、X軸に対するθ2アーム123の角度θ2Pにより求めることができる。以降の工程でも同様にして、移動後の分注プローブ124の位置座標を求めることができる。当該座標位置の計算は、制御部111が実行する。
【0052】
まず、図7Bに示すように、分注プローブ124を初期位置から所定の基準点Pまで移動させる(処理300)。ここで、基準点Pは、部品の製造時の加工誤差や組み立て誤差がない場合の停止位置である。この分注プローブ124の水平移動は、リニアステージ141及びθ2アーム123によるXY面内での水平移動と回転移動により実現される。分注プローブ124が基準点Pの座標位置に位置決めされると、制御部111は、シャフト121を降下させる。降下量は、降下完了後に、分注プローブ124をXY面内で移動させた際に、その先端部分が位置決め部材129の円筒構造130の内側面と接触できる高さまでである。
【0053】
この場合も、基準点Pは、位置決めすべき目標点Qと一致することが期待されている。しかし、位置決めすべき目標点Qは、加工誤差や組み立て誤差により基準点Pと一致しないことがある。その場合、基準点Pと目標点Qが一致するように、分注駆動機構の位置決めを再設定する必要がある。
【0054】
そこで、図7Cに示すように、θ2アーム123だけをXY面内で左右両方向に回転駆動し、分注プローブ124を位置決め部材129の円筒構造130の内面に接触させる。図では左側に位置する接触点を点Aとし、右側に位置する接触点を点Bとする。そして、接触が検出されるたび、点A及びBの座標(xa,ya)及び(xb,yb)を算出する(処理301、302)。
【0055】
なお、点Aとの接触の確認により、制御部111は、位置決め部材129が取り付けられていること及び液面検知器128が正常動作していることを確認することができる。点Aとの接触が確認できない場合、制御部111は、以下の動作を実行することなく、位置決め動作を停止する。この際、出力部116を通じて位置決め動作が中止されたことを操作者に報知することが望ましい。
【0056】
このように点A及びBの座標が検出されると、形態例1の場合と同様に、θ2アーム123だけを回転駆動し、分注プローブ124を基準点Pの位置に戻す(処理303)。この処理は必ずしも必須の処理ではないが、初期位置である基準点Pから次に検出する点Cの座標を算出することにより、点Cの座標の算出精度を高めることができる。
【0057】
分注プローブ124が基準点Pに戻ると、図7Dに示すように、今度は、リニアステージ141だけを直線駆動し、分注プローブ124が位置決め部材129の円筒構造130の内面に接触する位置までX軸方向に移動させる。この場合も、移動可能な方向は2つある。この形態例の場合には、基準点Pと点Aの距離と基準点Pと点Bの距離のうち遠い方の点が存在する方向に分注プローブ124を駆動する。図7Dの場合は点Aの方向に移動する。このとき、接触が検出された点を点Cとする(処理304)。点A及びBの場合と同様に、制御部111は、点Cの座標(xc,yc)を算出する。
【0058】
これら接触点(点A〜点C)の検出により、各点の座標(xa,ya)〜(xc,yc)が制御部111において算出される。これらの点A〜点Cは、円周上(より正確には、位置決め部材129の内側面から分注プローブ124の半径分だけ内側)の点である。このため、位置決め部材129の内側面に相当する円周上の円の中心である点Qの座標は、これらの3点から計算により算出することができる(処理305)。この点Qが、分注プローブ114を位置決めすべき座標位置を与える。
【0059】
以上説明した処理機能の搭載により、分注駆動機構が1つの直線駆動軸と1つの回転駆動軸を備える場合にも、分注プローブ124を正確にかつ短時間に所定位置に自動的に位置決めすることができる。
【0060】
[形態例3]
本形態例の場合には、接触点だけでなく分注プローブ124の移動軌跡も考慮して位置決めを実行する例について説明する。なお、自動分析装置の装置構成は、形態例1の場合と同様であるものとする。すなわち、分注プローブ124の水平移動を2つの回転駆動軸の組み合わせにより実現するものとする。もっとも、本形態例において説明する処理方法は、形態例2に係る自動分析装置にも適用することができる。
【0061】
以下、図8、図9A〜図9D及び図10A〜図10Fを使用して、本形態例に係る位置決め方法を説明する。ここで、図8は、接触点と分注プローブ124の移動軌跡による位置決め処理のフローチャートである。図8に示す処理手順のうち処理405及び407に示す条件分岐部分が、分注プローブ124の移動軌跡を考慮した判定処理に対応し、当該判定時点で目標点Qを与える候補点を決定できるか否かを判定する。なお、図9A〜図9Dは、分注プローブ124の移動軌跡を考慮して位置決め候補点の一つを目標点Qと判定できる場合を示している。図10は、分注プローブ124の移動軌跡を考慮しても、位置決め候補点を目標点Qと決定できない場合を示している。
【0062】
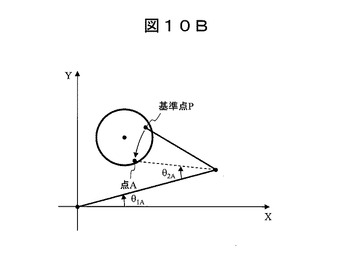
まず、移動軌跡の考慮により位置決め候補点を目標点Qに決定できる場合について説明する。図9Aに示すように、θ1アーム122及びθ2アーム123を駆動し、分注プローブ124を基準点Pに移動させる。この後、位置決め部材129の円筒構造130の内側面に分注プローブ124が接触できる高さまでシャフト121を降下させる(処理400)。
【0063】
次に、図9Bに示すように、θ2アーム123のみを一方向に回転駆動し、分注プローブ124を位置決め部材129を構成する円筒部材130の内側面に接触させ、点Aの位置を検出する(処理401)。
【0064】
この後、θ2アーム123を逆方向に回転駆動し、分注プローブ124を基準点Pの位置へ戻す(処理402)。
【0065】
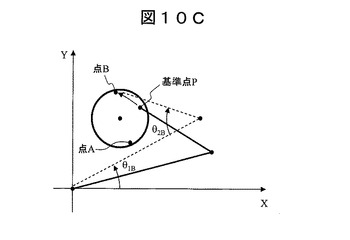
続いて、図9Cに示すように、θ1アーム122のみを一方向に回転駆動し、分注プローブ124を位置決め部材129の円筒構造130の内側面に接触させ、点Bの位置を検出する(処理403)。
【0066】
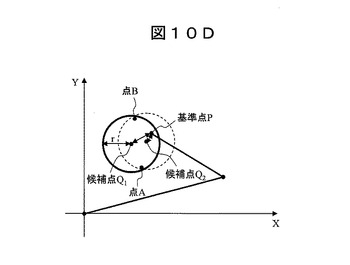
これまでの工程で位置決め部材129を構成する円筒構造130の内側面(内周)上の点A及び点Bの2点が検出される。ここで、円筒構造130の径rを考慮すると、位置決め目標点Qの候補点は、図9Dに示すように、点Q1 と点Q2 の2点となる(処理404)。内円に接する2点を通る円は2つ存在するためである。なお、形態例1の場合には、円周上の3点が検出されるため、目標点Qの座標点も一意に確定する。
【0067】
この段階で、制御部111は、基準点Pと点Aの距離(PQ1 )と基準点Pと点Bの距離(PQ2 )を算出し、それぞれを円筒構造130の半径rと比較する(処理405、処理407)。図9Dの場合、PQ1≦r、かつ、PQ2>rである。従って、処理405で否定結果が得られ、処理407で肯定結果が得られる。この場合、制御部111は、処理408に進み、候補点であるQ1 の方を目標点Qに確定する。
【0068】
これは、点Q2 を中心とする円筒構造130を考える場合、基準点Pが円筒構造130の内部から外れており、分注プローブ124の軌跡を考慮した場合、点Q2 は位置決めの目標点Qではあり得ないためである。従って、この場合、前述の通り、点Q1 を位置決め目標点Qとして確定することができる。なお、処理405で肯定結果が得られた場合、制御部111は処理406に進み、候補点であるQ2 の方を目標点Qに確定する。
【0069】
次に、移動軌跡を考慮しても位置決め候補点を特定できない場合について説明する。図10A〜図10Dは、前述した処理400〜404の処理に当たる。従って、ここまでの処理は、前述の例と同様の手順となる。
【0070】
ただし、図10Dの例は、PQ1 ≦r、かつ、PQ2≦rである。従って、処理405及び処理407のいずれにおいても否定結果となる。すなわち、分注プローブ124の移動軌跡を考慮したとしても、この時点では、点Q1 と点Q2 のいずれもが目標点Qとなる可能性がある。
【0071】
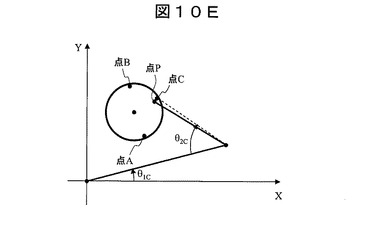
この場合、制御部111は、θ1アーム122のみを処理403とは逆方向に回転駆動して分注プローブ124を基準点Pに戻し、その後、θ2アーム123のみを処理401とは逆方向に回転駆動して3番目の点Cを検出する(処理409、410)。
【0072】
この時点で3つの点A、B及びCを通る円は1つだけに確定する。よって、これらの3点から目標点Qの座標を算出する(処理411)。ここで、目標点Qの座標の算出方法には、図10Fに示すように、候補点Q1 と点Cの距離CQ1 及び候補点Q2 と点Cの距離CQ2 のいずれが径rと一致するか否かによって判定する方法と形態例1のように点A〜Cの座標から目標点Qの座標を算出する方法のいずれを用いても良い。
【0073】
[形態例4]
本形態例の場合には、複数の停止位置に対して分注プローブ124を位置決めする場合の処理について説明する。ここでは、図11A〜図11Eを用いて、当該処理を説明する。同図は、試薬ディスク103上に、9個の吸引位置Ta1〜Tc3を設ける場合を示している。一般に、試薬ディスク103のように一体構造物上に設けられる吸引位置Ta1〜Tc3の相対位置誤差は小さく、試薬ディスク103と試薬分注機構107のように異なる機構間の位置関係には誤差が多く含まれる場合が多い。
【0074】
吸引位置Ta1〜Tc3の相対位置誤差が、位置決めする際に許容される誤差よりも十分に小さい場合、9箇所ある吸引位置のうち2箇所を正確に位置決めすることができれば、残り7箇所の位置決めは計算により実行することができる。以下、その方法を、図11A〜図11Eを用いて説明する。
【0075】
図11Aは、試薬ディスク103上に設けられた9箇所の吸引位置の配置例を示している。図11Aの場合、9箇所の吸引位置は、試薬ディスク103の中心Oから放射状に延びる3つの列に分散して配列されている。この例の場合、各列上には、吸引位置が3個ずつ配置されている。すなわち、Ta1〜Ta3の3つで構成される吸引位置列と、Tb1〜Tb3の3つで構成される吸引位置列と、Tc1〜Tc3の3つで構成される吸引位置列とに分散されている。なお、各列を構成する3つの吸引位置は、他の吸引位置列上で対応する各吸引位置と同心円上に配置されている。
【0076】
なお、この形態例の場合、各吸引位置列のなす角θab及びθbcと、同じ吸引位置列上に並ぶ吸引位置間の距離r01〜r23が分かっているものとする。
【0077】
この形態例では、3つの吸引位置列のうち1つに着目し、当該吸引位置列上の2点についてのみ分注プローブ124の位置決め処理を実際に実行する。なお、相対位置誤差を最小にするため、ここでは3つの吸引位置列のうち真ん中に位置する吸引位置列に注目する。
【0078】
まず、制御部111は、図11Bに示すように、最も内側に配置される吸引位置Tb1に対し、分注プローブ124を位置決めし、その位置座標を算出する。勿論、当該位置決めに際しては、前述した形態例1又は3の処理方法を適用する。勿論、分注駆動機構が形態例2に対応する場合には、形態例に記載した処理方法を適用する。
【0079】
次に、制御部111は、図11Cに示すように、吸引位置Tb1と同列の最も外側に配置される吸引位置Tb3に対し、分注プローブ124を位置決めし、その位置座標を算出する。この後、制御部111は、図11Dに示すように、吸引位置Tb1とTb3の座標と距離r01〜r23の関係に基づいて、同列上に位置する3個の吸引位置Tb1〜Tb3を結ぶ直線とx軸とのなす角θbと、中心Oの座標O(x0,y0)と、吸引位置Tb2の座標を算出する。
【0080】
さらに、制御部111は、図11Eに示すように、先に位置合わせが終了した吸引位置列の左右に位置する吸引位置列とのなす角θab及びθbcに基づいて、各吸引位置列に対応する3つの吸引位置Ta1〜Ta3及びTc1〜Tc3の座標を算出する。以上の通り、複数の吸引位置について位置決めが必要な場合でも、相互間の位置関係に関する情報を使用できる場合には、当該位置関係から要求される必要最小限(この形態例の場合は2箇所)の吸引位置Tb1及びTb3に対してのみ実際の位置決め処理を実行すれば、残りの吸引位置の位置決めは計算処理により実行することができる。
【0081】
なお、本形態例の場合、同じ列上に配列される3つの吸引位置のうち最内周と最外周の2点に位置する吸引位置について実際の位置決め処理を行っているが、同じ列上に位置する任意の2点について実際の位置決めを行っても良い。
【0082】
[他の形態例]
前述の形態例においては、位置決め部材129のうち分注プローブ124と接触する部分の形状が円筒構造130である場合について説明した。しかし、前述の形態例で説明した処理手法の適用に必要な条件は、内側面がXY面内において円形状であることである。従って、外側面の形状は必ずしも円である必要はない。すなわち、円筒構造130である必要はない。
【0083】
また、位置決め部材129の外側面との接触を利用して位置決めを実行する場合には、位置決め部材129のうち分注プローブ124の接触する外側面の形状が、XY面内において円形状であれば良い。すなわち、分注プローブ124が実際に接触する部分の形状は円柱形状でも良い。この場合も、外側面との2点以上の接触点について座標を算出することにより、位置決め部材129の中心座標を算出することができる。
【0084】
なお、本発明は上述した形態例に限定されるものでなく、様々な変形例が含まれる。例えば、上述した形態例は、本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある形態例の一部を他の形態例の構成に置き換えることが可能であり、また、ある形態例の構成に他の形態例の構成を加えることも可能である。また、各形態例の構成の一部について、他の構成を追加、削除又は置換することも可能である。
【0085】
また、上述した各構成、機能、処理部、処理手段等は、それらの一部又は全部を、例えば集積回路その他のハードウェアとして実現しても良い。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することにより実現しても良い。すなわち、ソフトウェアとして実現しても良い。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリやハードディスク、SSD(Solid State Drive)等の記憶装置、ICカード、SDカード、DVD等の記憶媒体に格納することができる。
【0086】
また、制御線や情報線は、説明上必要と考えられるものを示すものであり、製品上必要な全ての制御線や情報線を表すものでない。実際にはほとんど全ての構成が相互に接続されていると考えて良い。
【符号の説明】
【0087】
100…試料カップ、101…試料ラック、102…試薬ボトル、103…試薬ディスク、104…セル、105…セルディスク、106…試料分注機構、107…試薬分注機構、108…撹拌ユニット、109…測定ユニット、110…洗浄ユニット、111…制御部、112…データ格納部、113…入力部、114…測定部、115…解析部、116…出力部、121…シャフト、122…θ1アーム、123…θ2アーム、124…分注プローブ、125…プランジャ、126…シャフト、127…プランジャ、128…液面検知器、129…位置決め部材、130…円筒構造、131…くぼみ。
【特許請求の範囲】
【請求項1】
試料又は試薬を所定量分注する分注プローブと、
前記分注プローブを水平方向に2次元的に移動させる2つ以上の駆動軸を有し、かつ、当該駆動軸の少なくとも1つは回転駆動軸である分注プローブ駆動機構と、
前記分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの位置に設置可能な又は配置される位置決め部材であって、位置合わせの際に前記分注プローブが接触する部分が円形状に形成された位置決め部材と、
前記分注プローブが、前記位置決め部材に接触したことを検出する接触検出機構と、
前記分注プローブ駆動機構の2つ以上の駆動軸の1つのみを駆動制御して、前記位置決め部材の円形状の部分に接触させ、次に、前記駆動制御した駆動軸以外の1つの駆動軸のみを駆動制御して、前記位置決め部材の円形状の部分に接触させ、前記接触が検出された各点の位置情報、又は、前記接触が検出された各点の位置情報及び前記分注プローブを移動させた際の軌跡情報に基づいて、前記分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの中心点の位置情報を算出する制御部と
を備えたことを特徴とする自動分析装置。
【請求項2】
請求項1に記載の自動分析装置において、
前記位置決め部材は、前記分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの位置に着脱可能な形状部分を有する
ことを特徴とする自動分析装置。
【請求項3】
請求項1又は2に記載の自動分析装置において、
前記接触検出機構は、静電容量検出機構又は電気導通検出機構である
ことを特徴とする自動分析装置。
【請求項4】
請求項1、2又は3に記載の自動分析装置において、
n箇所(n≧3)の停止位置における相互の相対位置誤差が無視できる程小さい場合、前記制御部は、前記停止位置のうち2点に対する中心点の位置情報を算出し、他のn−2点に対する中心点の位置情報を算術演算により求める
ことを特徴とする自動分析装置。
【請求項5】
試料又は試薬を所定量分注する分注プローブと、
前記分注プローブを水平方向に2次元的に移動させる2つ以上の駆動軸を有し、かつ、当該駆動軸の少なくとも1つは回転駆動軸である分注プローブ駆動機構と、
前記分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの位置に設置可能な又は配置される位置決め部材であって、位置合わせの際に前記分注プローブが接触する部分が円形状に形成された位置決め部材と、
前記分注プローブが、前記位置決め部材に接触したことを検出する接触検出機構と、
前記分注プローブ駆動機構及び前記接触検出機構を制御する制御部とを有する自動分析装置において実行される自動分析方法において、
前記制御部が、
前記分注プローブ駆動機構の2つ以上の駆動軸の1つのみを駆動制御して、前記位置決め部材の円形状の部分に接触させる第1の処理と、
前記第1の処理の後、前記駆動制御した駆動軸以外の1つの駆動軸のみを駆動制御して、前記位置決め部材の円形状の部分に接触させる第2の処理と、
前記接触が検出された各点の位置情報、又は、前記接触が検出された各点の位置情報及び前記分注プローブを移動させた際の軌跡情報に基づいて、前記分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの中心点の位置情報を算出する第3の処理と
を実行することを特徴とする自動分析方法。
【請求項6】
請求項5に記載の自動分析方法において、
n箇所(n≧3)の停止位置における相互の相対位置誤差が無視できる程小さい場合、
前記制御部が、
前記停止位置のうち2点に対する中心点の位置情報を算出し、他のn−2点に対する中心点の位置情報を算術演算により求める
ことを特徴とする自動分析方法。
【請求項1】
試料又は試薬を所定量分注する分注プローブと、
前記分注プローブを水平方向に2次元的に移動させる2つ以上の駆動軸を有し、かつ、当該駆動軸の少なくとも1つは回転駆動軸である分注プローブ駆動機構と、
前記分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの位置に設置可能な又は配置される位置決め部材であって、位置合わせの際に前記分注プローブが接触する部分が円形状に形成された位置決め部材と、
前記分注プローブが、前記位置決め部材に接触したことを検出する接触検出機構と、
前記分注プローブ駆動機構の2つ以上の駆動軸の1つのみを駆動制御して、前記位置決め部材の円形状の部分に接触させ、次に、前記駆動制御した駆動軸以外の1つの駆動軸のみを駆動制御して、前記位置決め部材の円形状の部分に接触させ、前記接触が検出された各点の位置情報、又は、前記接触が検出された各点の位置情報及び前記分注プローブを移動させた際の軌跡情報に基づいて、前記分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの中心点の位置情報を算出する制御部と
を備えたことを特徴とする自動分析装置。
【請求項2】
請求項1に記載の自動分析装置において、
前記位置決め部材は、前記分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの位置に着脱可能な形状部分を有する
ことを特徴とする自動分析装置。
【請求項3】
請求項1又は2に記載の自動分析装置において、
前記接触検出機構は、静電容量検出機構又は電気導通検出機構である
ことを特徴とする自動分析装置。
【請求項4】
請求項1、2又は3に記載の自動分析装置において、
n箇所(n≧3)の停止位置における相互の相対位置誤差が無視できる程小さい場合、前記制御部は、前記停止位置のうち2点に対する中心点の位置情報を算出し、他のn−2点に対する中心点の位置情報を算術演算により求める
ことを特徴とする自動分析装置。
【請求項5】
試料又は試薬を所定量分注する分注プローブと、
前記分注プローブを水平方向に2次元的に移動させる2つ以上の駆動軸を有し、かつ、当該駆動軸の少なくとも1つは回転駆動軸である分注プローブ駆動機構と、
前記分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの位置に設置可能な又は配置される位置決め部材であって、位置合わせの際に前記分注プローブが接触する部分が円形状に形成された位置決め部材と、
前記分注プローブが、前記位置決め部材に接触したことを検出する接触検出機構と、
前記分注プローブ駆動機構及び前記接触検出機構を制御する制御部とを有する自動分析装置において実行される自動分析方法において、
前記制御部が、
前記分注プローブ駆動機構の2つ以上の駆動軸の1つのみを駆動制御して、前記位置決め部材の円形状の部分に接触させる第1の処理と、
前記第1の処理の後、前記駆動制御した駆動軸以外の1つの駆動軸のみを駆動制御して、前記位置決め部材の円形状の部分に接触させる第2の処理と、
前記接触が検出された各点の位置情報、又は、前記接触が検出された各点の位置情報及び前記分注プローブを移動させた際の軌跡情報に基づいて、前記分注プローブの吸引位置、吐出位置及び洗浄位置の少なくともいずれかの中心点の位置情報を算出する第3の処理と
を実行することを特徴とする自動分析方法。
【請求項6】
請求項5に記載の自動分析方法において、
n箇所(n≧3)の停止位置における相互の相対位置誤差が無視できる程小さい場合、
前記制御部が、
前記停止位置のうち2点に対する中心点の位置情報を算出し、他のn−2点に対する中心点の位置情報を算術演算により求める
ことを特徴とする自動分析方法。
【図1】

【図2】
【図3A】
【図3B】
【図4】
【図5A】

【図5B】
【図5C】
【図5D】
【図5E】
【図6】
【図7A】
【図7B】
【図7C】
【図7D】
【図8】
【図9A】
【図9B】
【図9C】
【図9D】

【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図11A】
【図11B】
【図11C】
【図11D】
【図11E】
【図2】
【図3A】
【図3B】
【図4】
【図5A】
【図5B】
【図5C】
【図5D】
【図5E】
【図6】
【図7A】
【図7B】
【図7C】
【図7D】
【図8】
【図9A】
【図9B】
【図9C】
【図9D】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図11A】
【図11B】
【図11C】
【図11D】
【図11E】
【公開番号】特開2012−242106(P2012−242106A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−109243(P2011−109243)
【出願日】平成23年5月16日(2011.5.16)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月16日(2011.5.16)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]