
自動分析装置
【課題】試薬及び検体を含む混合液の容器からの流出を防止しつつ、当該混合液を攪拌する手段を備えた自動分析装置を提供する。
【解決手段】試薬入りまたは空の容器を貯蔵元から搬送して載置する載置位置と、これらの容器に少なくとも検体及び必要な前処理試薬または希釈液を注入する分注処理を行うための分注位置と、前処理が必要な場合に前記分注処理後の前記容器を前処理反応用テーブル7に搬送するカップトランスファへの受け渡し位置と、の間で移動可能な搬送ユニット3と、容器搬送ユニット3に振動を付与する振動モータユニット8とを有することを特徴とする。ここで、振動モータユニット8は、分注位置において、容器搬送ユニット3に振動を付与しても良いし、容器受け渡し位置に容器を搬送する途中で振動を付与してもよい。
【解決手段】試薬入りまたは空の容器を貯蔵元から搬送して載置する載置位置と、これらの容器に少なくとも検体及び必要な前処理試薬または希釈液を注入する分注処理を行うための分注位置と、前処理が必要な場合に前記分注処理後の前記容器を前処理反応用テーブル7に搬送するカップトランスファへの受け渡し位置と、の間で移動可能な搬送ユニット3と、容器搬送ユニット3に振動を付与する振動モータユニット8とを有することを特徴とする。ここで、振動モータユニット8は、分注位置において、容器搬送ユニット3に振動を付与しても良いし、容器受け渡し位置に容器を搬送する途中で振動を付与してもよい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、血液、血清などの生体試料(検体)に含まれる微量成分を分析する自動分析装置に関する。
【背景技術】
【0002】
臨床診断などの分野では、被験者から採取した検体中に含まれる特定成分の存在や濃度を分析し、その結果から疫病などの診断を行うために自動分析装置が広く用いられている。これらの自動分析装置では、試薬入り反応容器に、検体と少量の希釈水とを注入したのちインキュベータテーブル上の反応工程に移行し、その後検出工程に移行するという測定プロトコルを採用するのが一般的である。
【0003】
しかし、自動分析装置で使用する反応容器には大きさに制限があるので、あらかじめ検体をかなりの程度希釈しておく必要がある場合がある。また、正しい測定結果を得るために、検体を特殊な前処理試薬で化学処理しておく必要がある場合がある。
【0004】
検体を希釈する場合、空の希釈用容器内に検体及び希釈液を注入したのち、当該希釈用容器内の希釈混合液を新たな検体と見なして、前記測定プロトコルに従い試薬入り反応容器に注入する。検体の前処理が必要な場合、空の前処理用容器内に検体及び前処理試薬を注入したのち、コンベア機能及び温調機能を備えた前処理反応用テーブルに前処理用容器を搬送して、その混合液を一定時間化学反応させるのが好ましい。そうして得られた前処理済み検体を新たな検体と見なして前記測定プロトコルに従い試薬入り反応容器に注入する。
【0005】
検体を希釈する場合、空の希釈用容器内に検体及び希釈液を注入したのち試薬入り反応容器に注入する前に、希釈済み混合液を攪拌して均一化することが測定再現性及び正確性を高めるために好ましい。また、検体の前処理を行う場合、空の前処理用容器内に検体及び前処理試薬を注入したのち前処理反応用テーブルにこの前処理用容器を搬送する前あるいは前処理済み混合液を試薬入り反応容器に注入する前に、前処理用容器内の混合液を攪拌して均一化することが測定再現性及び正確性を高めるために好ましい。
【0006】
この種の攪拌手段として、第1〜第3の方法が知られている。第1の方法は、分注ノズルにより、反応容器内の混合液を吸引及び排出して、混合液を攪拌するという方法である。第2の方法は、反応容器の上端部に設けられたフランジ部を把持機構で把持して、当該把持機構を揺動させることにより、反応容器内の混合液を攪拌するという方法である。第3の方法は、反応容器内に攪拌部材(例えば、攪拌フィン)を挿入して、当該攪拌部材を回転させることにより、混合液を攪拌するという方法である。
【0007】
本明細書において、反応容器とは狭義においては化学分析に利用される免疫反応、生化学反応などの反応溶液を収容する容器を意味するが、広義には検体の前処理や希釈のために利用される容器を含んだ意味にも使用される。
【特許文献1】特許第3733431号明細書
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、第1の方法では、反応容器内の混合液を吸引、排出するために反応容器の搬送動作および分注ノズル動作を停止させなければならないため、自動分析装置の処理速度を低下させるおそれがある。
【0009】
また、第2の方法では、把持機構に把持させるのみでは、反応容器の姿勢が安定しないため、把持機構を揺動させた際に反応容器から試薬液が流出したり、把持機構から反応容器が外れて落下するおそれがある。また、把持機構を反応容器のフランジ部に正確に位置決めしなければならないため、位置決め制御が煩雑化するおそれがある。
【0010】
さらに、第3の方法では、反応容器から退避した攪拌部材を次の反応容器に入れる前に、洗浄しなければならないため、大きなタイムロスにつながるおそれがある。また、攪拌部材を反応容器から引き抜く際に、周辺に混合液が飛散するおそれがある。
【0011】
そこで、本願発明は、検体と希釈液、検体と前処理試薬などの混合物を迅速に均一化する機能を備えた自動分析装置を提供することを目的とする。また、攪拌の際の混合液の流出、飛散を防止しつつ混合物を攪拌する手段を備えた自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するための、本願発明の自動分析装置は、試薬入りまたは空の容器を貯蔵元から搬送して載置する載置位置と、前記試薬入りまたは空の容器に少なくとも検体及び必要な前処理試薬または希釈液を注入する分注処理を行うための分注位置と、前処理が必要な場合に前記分注処理後の前記容器を前処理反応用テーブルに搬送する搬送部への受け渡し位置と、の間で移動可能な搬送ユニットと、前記搬送ユニットに振動を付与する加振手段と、を有することを特徴とする。
【0013】
ここで、前記加振手段は、分注位置において、前記搬送ユニットに振動を付与してもよいし、容器受け渡し位置に容器を搬送する搬送途中で前記搬送ユニットに振動を付与してもよい。
【発明の効果】
【0014】
本願発明によれば、分注処理の前工程及び後工程を結ぶ搬送路上の任意の場所で、容器の中の混合液の攪拌ができる。攪拌のための追加的な部材を導入して位置決めする必要がないので、部品点数の節約と制御機構の簡素化、攪拌工程の迅速化が図れる。攪拌の際の混合液の流出、飛散を防止することができる。
【発明を実施するための最良の形態】
【0015】
以下、図面を参照しながら、本発明の実施例について詳細に説明する。
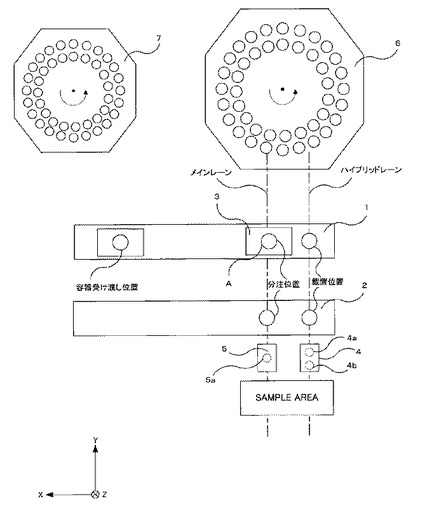
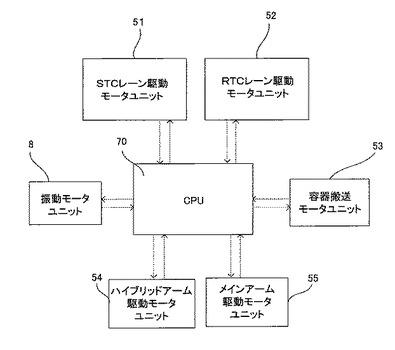
図1は、自動分析装置の平面図である。ただし、本願発明と関連性が低い部分については省略して図示している。図2は、自動分析装置の機能ブロックである。なお、STCレーン1上のメインレーンの分注位置が請求項1に記載の分注位置に相当する。ここで、STCレーンとは、希釈・前処理容器搬送レーンを意味する。
【0016】
Y軸方向に並設されたSTCレーン1及びRTCレーン2のうち前者には、容器搬送ユニット3がX軸方向に移動可能に設けられており、不図示の搬送アームからハイブリッドレーン上の載置位置まで搬送される容器Aをメインレーン上の分注位置に移動させる。容器搬送ユニット3をSTCレーン1に沿ってX軸方向に移動させるSTCレーン駆動モータユニット51には、パルスモータが組み込まれており、STCレーン駆動モータユニット51に対して電気的に接続されたCPU70から出力される駆動信号に基づきパルスモータの駆動は制御される。
【0017】
試薬入りの反応容器を搬送するためのRTCレーン駆動モータユニット52には、パルスモータが組み込まれており、RTCレーン駆動モータユニット52に対して電気的に接続されたCPU70から出力される駆動信号に基づきパルスモータの駆動は制御される。ここで、RTCレーンとは、容器搬送レーンを意味する。
【0018】
容器搬送ユニット3は、容器搬送モータユニット53に組み込まれたパルスモータから駆動力を受けて、STCレーン1に沿ってX軸方向に移動する。容器搬送モータユニット53はCPU70に対して電気的に接続されており、CPU70から出力される駆動信号に基づきパルスモータの駆動が制御される。
【0019】
ハイブリッドアーム4には、分注ノズル4aとカップトランスファ4bが搭載されており、ハイブリッドアーム駆動モータユニット54に組み込まれたパルスモータから駆動力を受けてY軸方向(つまり、一点鎖線で示すハイブリッドレーンに沿って移動する)及びZ軸方向に移動する。ハイブリッドアーム駆動モータユニット54はCPU70に対して電気的に接続されており、CPU70から出力される駆動信号に基づきパルスモータの駆動が制御される。
【0020】
分注ノズル4aは、STCレーン1上の載置位置に搬送された容器A内に、不図示の試薬カローセルから分析に必要な各種試薬例えば検体前処理後に使用される中和剤や免疫反応試薬類を分注する機能を有する。カップトランスファ4bは容器Aをインキュベータテーブル6に搬送する機能を有する。
【0021】
メインアーム5には、分注ノズル5aが搭載されており(カップトランスファ4bに対応する搬送手段はない)、メインアーム駆動モータユニット55に組み込まれたパルスモータから駆動力を受けてY軸方向(つまり、一点鎖線で示すメインレーンに沿って移動する)及びZ軸方向に移動する。メインアーム駆動モータユニット55はCPU70に対して電気的に接続されており、CPU70から出力される駆動信号に基づきパルスモータの駆動が制御される。
【0022】
分注ノズル5aは、サンプルエリアから検体を吸引採取して、STCレーン1上に位置する希釈・前処理用の容器Aに、またはRTCレーン2上に位置する試薬入りの反応容器に、それぞれ分注する機能を有する。また、不図示の試薬カローセルから検体用希釈液または前処理試薬を吸引採取して、STCレーン1上に位置する希釈・前処理用の容器Aに分注したり、前処理済み検体を入れた容器Aが分注位置に搬送されたときには、その中の前処理済み検体を吸引採取して、RTCレーン2上に待機している容器に分注する機能を有する。検体の前処理を行う場合、この容器Aは、後述するように振動モータユニット8により加振された(攪拌された)後に、容器搬送ユニット3によりSTCレーン1の下流に位置する容器受け渡し位置に搬送される。
【0023】
容器受け渡し位置に搬送された容器Aは、不図示のカップトランスファ(請求項1に記載の搬送部に相当)により前処理反応用テーブル7に搬送される。
【0024】
前処理反応用テーブル7で所定時間(例えば10分)旋回された後、容器Aは、容器受け渡し位置及びSTCレーン1上のメインレーンの分注位置を経て、ハイブリッドレーンと交わる載置位置に搬送され、前述のように分注ノズル4aによって中和剤が容器Aに添加される。その後、直ちに容器搬送ユニット3の加振手段によって容器A内の混合液が攪拌され、容器Aは再びSTCレーン1上のメインレーンの分注位置に搬送される。
【0025】
また、分注ノズル5aは、前処理反応用テーブル7からSTCレーン1上のメインレーンの分注位置まで搬送された容器A内の混合液を吸引し、これをRTCレーン2上のメインレーンの分注位置に待機している容器A内に注入する。
【0026】
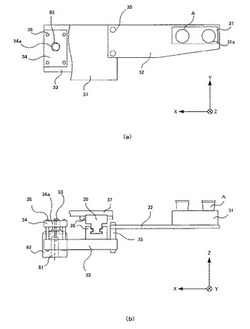
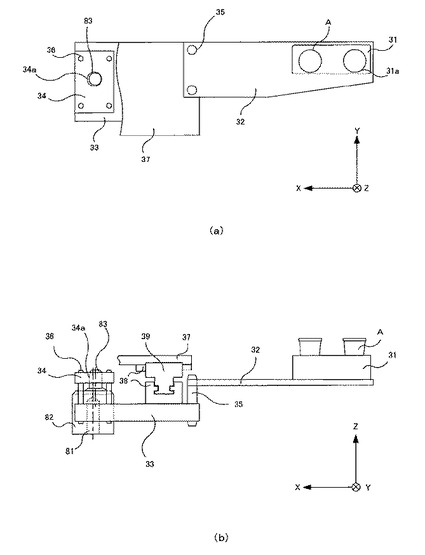
次に、図3を参照して、容器搬送ユニット3及び振動モータユニット8の構成について詳細に説明する。ここで、図3は容器搬送ユニット3の概略図であり、(a)が平面図であり、(b)が側面図である。説明に必要な内部構造については、一点鎖線により投影して図示している。
【0027】
第1の振動伝達板32のX軸方向一端部には、容器装着ポート31が設けられており、この容器装着ポート31には、容器Aを装着するための凹部31aがX軸方向に二つ並設されている。
【0028】
第1の振動伝達板32のX軸方向他端部は、第2の振動伝達板33のX軸方向一端部に連結ピン35を介して固定されている。この連結ピン35は、Y軸方向に並んで二つ設けられている。
【0029】
図3(b)には、振動モータユニット8のモータ出力軸81を点線で示しており、このモータ出力軸81の外周にはXY断面を円形に形成したカバー部材82が組み付けられており、このカバー部材82は、モータ出力軸81と一体になって回転する。
【0030】
第2の振動伝達板33のX軸方向他端部には、カバー部材82に対する干渉を回避するためのU字状の切欠部(不図示)が形成されている。
【0031】
カバー部材82のZ軸方向一端部(モータ本体に対して遠い側の端部)には、モータの出力軸81に対して偏芯した偏芯軸部材83が設けられており、この偏芯軸部材83は、モータ出力軸81の回転動作に応じて、モータ出力軸81の軸周りに偏芯回転する。
【0032】
第3の振動伝達板34の四隅には連結ピン36が設けられており、これらの連結ピン36を介して第2の振動伝達板33及び第3の振動伝達板34が連結されている。
【0033】
第3の振動伝達板34の平面視(Z軸方向視)中央には、円形の回転用開口部34aが形成されており、この回転用開口部34aの中心軸は、振動モータユニット8のモータ出力軸81に対して同軸上に設定されている。
【0034】
回転用開口部34aの内径部の一部には、振動モータユニット8の偏芯軸部材83が当接しており、回転用開口部34aの中心軸に対して偏芯軸部材83の軸が偏芯している。
【0035】
ガイド部材38は、Y軸方向及びX軸方向に延びるガイド部材(例えばLMガイド(登録商標))を有しており、被ガイド部材39は、このガイド部材38に係合することにより、Y軸方向及びX軸方向にガイドされる。X軸方向用のガイド部材38は、固定板37に固定されている。固定板37は不図示のガイドによりSTCレーン1に沿ってX軸上を直線移動する。
【0036】
上述の構成において、振動モータユニット8を駆動してモータ出力軸81を回転させると、偏芯軸部材83が回転用開口部34aの内径部に当接しながらモータ出力軸81の軸周りに偏芯回転して、第3の振動伝達板34が振動する。第3の振動伝達板34の振動は、連結ピン36→第2の振動伝達板33→連結ピン35→第1の振動伝達板32の順に伝達され、最後に容器装着ポート31を振動させることができる。これにより、容器Aに収容された混合液を攪拌することができる。
【0037】
また、容器装着ポート31に容器Aを装着した状態で混合液を攪拌しているため、上述した第2の方法(把持機構で容器を把持する方法)よりも容器Aの姿勢が安定し、液漏れなどの不具合を無くすことができる。さらに、容器搬送ユニット3を振動させる際に、小型の振動モータユニットが一つあれば足りるため、低コスト化及び軽量化を図ることができる。
【0038】
またさらに、ガイド部材38及び被ガイド部材39の係合作用により、容器装着ポート31、第1の振動伝達板32、第2の振動伝達板33及び第3の振動伝達板34は、一つの剛体として、STCレーン1に沿って直線運動することだけに拘束された固定板37の動きとは独立に、水平面内(X軸及びY軸を含む平面内)で向きを変えることなく小さく旋回することとなる。いわば、水平円軌道上を通る並進運動である。振動モータユニット8の回転数の制御、偏芯軸部材の偏芯度の設計、載置する容器の形状と大きさ、容器Aに入れる液体の量や粘性など、多くのパラメータが存在するが、本発明によれば容器Aの姿勢が安定した再現性の高い振動状態が実現できる。したがって、前記パラメータを制御することにより攪拌の際の混合液の流出、飛散を的確に防止することができる。
【0039】
次に、自動分析装置の動作について検体の前処理を行う場合を例にとって説明する。まず、容器ラック(不図示)上にマトリクス状に載置された希釈・前処理用の容器Aおよび試薬入り反応容器を搬送アーム(不図示)によりそれぞれSTCレーン1の容器装着ポート31及びRTCレーン2上に載置する。
【0040】
装着ポート31に装着された容器Aは、容器搬送ユニット3により、メインレーンの分注位置に搬送される。次に、メインアーム5がY軸方向及びZ軸方向に移動して、装着ポート31に装着された容器A内に分注ノズル5aにより検体及び前処理試薬が注入される。
【0041】
次に、振動モータユニット8を駆動して、容器装着ポート31を振動させる。これにより、容器装着ポート31に装着された容器Aが振動し、容器A内の混合液を攪拌することができる。また、上述した第1の方法(混合液をノズルで吸引及び排出して攪拌する方法)、第3の方法(攪拌部材で攪拌する方法)よりも容器Aの停止時間を短くできるため、自動分析装置の処理速度を速めることができる。
【0042】
容器装着ポート31への加振が終了すると、容器搬送ユニット3がSTCレーン1の下流に搬送され、容器装着ポート31に装着された容器Aは、前処理反応用テーブル7に搬送される。
【0043】
前処理反応用テーブル7に搬送された容器Aは、約10分間回転され、STCレーン1の搬送方向下流に待機している容器搬送ユニット3により、容器受け渡し位置及びSTCレーン1上のメインレーンの分注位置を経て、ハイブリッドレーンと交わる載置位置に搬送され、分注ノズル4aによって中和剤が容器Aに添加される。その後、ただちに容器搬送ユニット3の加振手段によって容器A内の混合液が攪拌され、容器Aは再びSTCレーン1上のメインレーンの分注位置に搬送される。
【0044】
次に、メインアーム5をSTCレーン1の分注位置に移動させ、分注ノズル5aにより前処理反応用テーブル7から搬送された容器A内の混合液を吸引し、この混合液をRTCレーン2のメインレーン上の分注位置に待機している別の反応容器A内に注入する。
【0045】
そして、RTCレーン2を搬送方向上流に移動させ、当該反応容器Aをハイブリッドレーン上の分注位置に移動させ、ハイブリッドアーム4のカップトランスファ4bによりインキュベータテーブル6に搬送する。
(他の実施例)
上述の実施例では、容器搬送ユニット3の搬送動作を停止した状態で、容器Aを振動させたが、容器搬送ユニット3をSTCレーン1の下流に搬送させながら容器Aを振動させてもよい。これにより、自動分析装置の処理速度をさらに向上させることができる。
【0046】
上記実施形態は、請求項4に記載の「第1の位置と第2の位置との間で容器を移送する搬送手段を有する自動分析装置であって、移送可能な搬送ユニットと、前記搬送ユニットに振動を付与する加振手段とを有することを特徴とする自動分析装置」を具現化したものでもある。
【0047】
ここで、第1の位置は、液体を分注する位置であっても、液体を分注した容器を移送する位置であってもよい。また、第2の位置は、液体を分注する位置であっても、何らかの光学的な測定を行う位置であっても、また他の装置に容器を移送する位置であってもよい。
【0048】
さらに、容器は下記のものであってもよい。すなわち、空の容器に対して2種類以上の液体を分注してもよいし、凍結乾燥によって予め粉末状にした試薬を入れた容器に対して1種類の液体を分注してもよい。また、分注する液体は、必ずしも検体である必要はなく、単なる緩衝液であってもよいし、例えば2種類の試薬を粉末状にして入れてある容器であってもよい。
【図面の簡単な説明】
【0049】
【図1】自動分析装置の平面図である。
【図2】自動分析装置の機能ブロック図である。
【図3】容器搬送ユニットの概略図であり、(a)が平面図であり、(b)が側面図である。
【符号の説明】
【0050】
1 STCレーン(希釈・前処理容器搬送レーン)
2 RTCレーン(反応容器搬送レーン)
3 容器搬送ユニット
4 ハイブリッドアーム
4a 分注ノズル
4b カップトランスファ
5 メインアーム
5a 分注ノズル
6 インキュベータテーブル
7 前処理反応用テーブル
8 振動モータユニット
31 容器装着ポート
32 第1の振動伝達板
33 第2の振動伝達板
34 第3の振動伝達板
34a 回転用開口部
35 36 連結ピン
37 固定板
38 ガイド部材
39 被ガイド部材
51 STCレーン駆動モータユニット
52 RTCレーン駆動モータユニット
53 容器搬送モータユニット
54 ハイブリッドアーム駆動モータユニット
55 メインアーム駆動モータユニット
70 CPU
81 出力軸
82 カバー部材
83 偏芯軸部材
【技術分野】
【0001】
本発明は、例えば、血液、血清などの生体試料(検体)に含まれる微量成分を分析する自動分析装置に関する。
【背景技術】
【0002】
臨床診断などの分野では、被験者から採取した検体中に含まれる特定成分の存在や濃度を分析し、その結果から疫病などの診断を行うために自動分析装置が広く用いられている。これらの自動分析装置では、試薬入り反応容器に、検体と少量の希釈水とを注入したのちインキュベータテーブル上の反応工程に移行し、その後検出工程に移行するという測定プロトコルを採用するのが一般的である。
【0003】
しかし、自動分析装置で使用する反応容器には大きさに制限があるので、あらかじめ検体をかなりの程度希釈しておく必要がある場合がある。また、正しい測定結果を得るために、検体を特殊な前処理試薬で化学処理しておく必要がある場合がある。
【0004】
検体を希釈する場合、空の希釈用容器内に検体及び希釈液を注入したのち、当該希釈用容器内の希釈混合液を新たな検体と見なして、前記測定プロトコルに従い試薬入り反応容器に注入する。検体の前処理が必要な場合、空の前処理用容器内に検体及び前処理試薬を注入したのち、コンベア機能及び温調機能を備えた前処理反応用テーブルに前処理用容器を搬送して、その混合液を一定時間化学反応させるのが好ましい。そうして得られた前処理済み検体を新たな検体と見なして前記測定プロトコルに従い試薬入り反応容器に注入する。
【0005】
検体を希釈する場合、空の希釈用容器内に検体及び希釈液を注入したのち試薬入り反応容器に注入する前に、希釈済み混合液を攪拌して均一化することが測定再現性及び正確性を高めるために好ましい。また、検体の前処理を行う場合、空の前処理用容器内に検体及び前処理試薬を注入したのち前処理反応用テーブルにこの前処理用容器を搬送する前あるいは前処理済み混合液を試薬入り反応容器に注入する前に、前処理用容器内の混合液を攪拌して均一化することが測定再現性及び正確性を高めるために好ましい。
【0006】
この種の攪拌手段として、第1〜第3の方法が知られている。第1の方法は、分注ノズルにより、反応容器内の混合液を吸引及び排出して、混合液を攪拌するという方法である。第2の方法は、反応容器の上端部に設けられたフランジ部を把持機構で把持して、当該把持機構を揺動させることにより、反応容器内の混合液を攪拌するという方法である。第3の方法は、反応容器内に攪拌部材(例えば、攪拌フィン)を挿入して、当該攪拌部材を回転させることにより、混合液を攪拌するという方法である。
【0007】
本明細書において、反応容器とは狭義においては化学分析に利用される免疫反応、生化学反応などの反応溶液を収容する容器を意味するが、広義には検体の前処理や希釈のために利用される容器を含んだ意味にも使用される。
【特許文献1】特許第3733431号明細書
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、第1の方法では、反応容器内の混合液を吸引、排出するために反応容器の搬送動作および分注ノズル動作を停止させなければならないため、自動分析装置の処理速度を低下させるおそれがある。
【0009】
また、第2の方法では、把持機構に把持させるのみでは、反応容器の姿勢が安定しないため、把持機構を揺動させた際に反応容器から試薬液が流出したり、把持機構から反応容器が外れて落下するおそれがある。また、把持機構を反応容器のフランジ部に正確に位置決めしなければならないため、位置決め制御が煩雑化するおそれがある。
【0010】
さらに、第3の方法では、反応容器から退避した攪拌部材を次の反応容器に入れる前に、洗浄しなければならないため、大きなタイムロスにつながるおそれがある。また、攪拌部材を反応容器から引き抜く際に、周辺に混合液が飛散するおそれがある。
【0011】
そこで、本願発明は、検体と希釈液、検体と前処理試薬などの混合物を迅速に均一化する機能を備えた自動分析装置を提供することを目的とする。また、攪拌の際の混合液の流出、飛散を防止しつつ混合物を攪拌する手段を備えた自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するための、本願発明の自動分析装置は、試薬入りまたは空の容器を貯蔵元から搬送して載置する載置位置と、前記試薬入りまたは空の容器に少なくとも検体及び必要な前処理試薬または希釈液を注入する分注処理を行うための分注位置と、前処理が必要な場合に前記分注処理後の前記容器を前処理反応用テーブルに搬送する搬送部への受け渡し位置と、の間で移動可能な搬送ユニットと、前記搬送ユニットに振動を付与する加振手段と、を有することを特徴とする。
【0013】
ここで、前記加振手段は、分注位置において、前記搬送ユニットに振動を付与してもよいし、容器受け渡し位置に容器を搬送する搬送途中で前記搬送ユニットに振動を付与してもよい。
【発明の効果】
【0014】
本願発明によれば、分注処理の前工程及び後工程を結ぶ搬送路上の任意の場所で、容器の中の混合液の攪拌ができる。攪拌のための追加的な部材を導入して位置決めする必要がないので、部品点数の節約と制御機構の簡素化、攪拌工程の迅速化が図れる。攪拌の際の混合液の流出、飛散を防止することができる。
【発明を実施するための最良の形態】
【0015】
以下、図面を参照しながら、本発明の実施例について詳細に説明する。
図1は、自動分析装置の平面図である。ただし、本願発明と関連性が低い部分については省略して図示している。図2は、自動分析装置の機能ブロックである。なお、STCレーン1上のメインレーンの分注位置が請求項1に記載の分注位置に相当する。ここで、STCレーンとは、希釈・前処理容器搬送レーンを意味する。
【0016】
Y軸方向に並設されたSTCレーン1及びRTCレーン2のうち前者には、容器搬送ユニット3がX軸方向に移動可能に設けられており、不図示の搬送アームからハイブリッドレーン上の載置位置まで搬送される容器Aをメインレーン上の分注位置に移動させる。容器搬送ユニット3をSTCレーン1に沿ってX軸方向に移動させるSTCレーン駆動モータユニット51には、パルスモータが組み込まれており、STCレーン駆動モータユニット51に対して電気的に接続されたCPU70から出力される駆動信号に基づきパルスモータの駆動は制御される。
【0017】
試薬入りの反応容器を搬送するためのRTCレーン駆動モータユニット52には、パルスモータが組み込まれており、RTCレーン駆動モータユニット52に対して電気的に接続されたCPU70から出力される駆動信号に基づきパルスモータの駆動は制御される。ここで、RTCレーンとは、容器搬送レーンを意味する。
【0018】
容器搬送ユニット3は、容器搬送モータユニット53に組み込まれたパルスモータから駆動力を受けて、STCレーン1に沿ってX軸方向に移動する。容器搬送モータユニット53はCPU70に対して電気的に接続されており、CPU70から出力される駆動信号に基づきパルスモータの駆動が制御される。
【0019】
ハイブリッドアーム4には、分注ノズル4aとカップトランスファ4bが搭載されており、ハイブリッドアーム駆動モータユニット54に組み込まれたパルスモータから駆動力を受けてY軸方向(つまり、一点鎖線で示すハイブリッドレーンに沿って移動する)及びZ軸方向に移動する。ハイブリッドアーム駆動モータユニット54はCPU70に対して電気的に接続されており、CPU70から出力される駆動信号に基づきパルスモータの駆動が制御される。
【0020】
分注ノズル4aは、STCレーン1上の載置位置に搬送された容器A内に、不図示の試薬カローセルから分析に必要な各種試薬例えば検体前処理後に使用される中和剤や免疫反応試薬類を分注する機能を有する。カップトランスファ4bは容器Aをインキュベータテーブル6に搬送する機能を有する。
【0021】
メインアーム5には、分注ノズル5aが搭載されており(カップトランスファ4bに対応する搬送手段はない)、メインアーム駆動モータユニット55に組み込まれたパルスモータから駆動力を受けてY軸方向(つまり、一点鎖線で示すメインレーンに沿って移動する)及びZ軸方向に移動する。メインアーム駆動モータユニット55はCPU70に対して電気的に接続されており、CPU70から出力される駆動信号に基づきパルスモータの駆動が制御される。
【0022】
分注ノズル5aは、サンプルエリアから検体を吸引採取して、STCレーン1上に位置する希釈・前処理用の容器Aに、またはRTCレーン2上に位置する試薬入りの反応容器に、それぞれ分注する機能を有する。また、不図示の試薬カローセルから検体用希釈液または前処理試薬を吸引採取して、STCレーン1上に位置する希釈・前処理用の容器Aに分注したり、前処理済み検体を入れた容器Aが分注位置に搬送されたときには、その中の前処理済み検体を吸引採取して、RTCレーン2上に待機している容器に分注する機能を有する。検体の前処理を行う場合、この容器Aは、後述するように振動モータユニット8により加振された(攪拌された)後に、容器搬送ユニット3によりSTCレーン1の下流に位置する容器受け渡し位置に搬送される。
【0023】
容器受け渡し位置に搬送された容器Aは、不図示のカップトランスファ(請求項1に記載の搬送部に相当)により前処理反応用テーブル7に搬送される。
【0024】
前処理反応用テーブル7で所定時間(例えば10分)旋回された後、容器Aは、容器受け渡し位置及びSTCレーン1上のメインレーンの分注位置を経て、ハイブリッドレーンと交わる載置位置に搬送され、前述のように分注ノズル4aによって中和剤が容器Aに添加される。その後、直ちに容器搬送ユニット3の加振手段によって容器A内の混合液が攪拌され、容器Aは再びSTCレーン1上のメインレーンの分注位置に搬送される。
【0025】
また、分注ノズル5aは、前処理反応用テーブル7からSTCレーン1上のメインレーンの分注位置まで搬送された容器A内の混合液を吸引し、これをRTCレーン2上のメインレーンの分注位置に待機している容器A内に注入する。
【0026】
次に、図3を参照して、容器搬送ユニット3及び振動モータユニット8の構成について詳細に説明する。ここで、図3は容器搬送ユニット3の概略図であり、(a)が平面図であり、(b)が側面図である。説明に必要な内部構造については、一点鎖線により投影して図示している。
【0027】
第1の振動伝達板32のX軸方向一端部には、容器装着ポート31が設けられており、この容器装着ポート31には、容器Aを装着するための凹部31aがX軸方向に二つ並設されている。
【0028】
第1の振動伝達板32のX軸方向他端部は、第2の振動伝達板33のX軸方向一端部に連結ピン35を介して固定されている。この連結ピン35は、Y軸方向に並んで二つ設けられている。
【0029】
図3(b)には、振動モータユニット8のモータ出力軸81を点線で示しており、このモータ出力軸81の外周にはXY断面を円形に形成したカバー部材82が組み付けられており、このカバー部材82は、モータ出力軸81と一体になって回転する。
【0030】
第2の振動伝達板33のX軸方向他端部には、カバー部材82に対する干渉を回避するためのU字状の切欠部(不図示)が形成されている。
【0031】
カバー部材82のZ軸方向一端部(モータ本体に対して遠い側の端部)には、モータの出力軸81に対して偏芯した偏芯軸部材83が設けられており、この偏芯軸部材83は、モータ出力軸81の回転動作に応じて、モータ出力軸81の軸周りに偏芯回転する。
【0032】
第3の振動伝達板34の四隅には連結ピン36が設けられており、これらの連結ピン36を介して第2の振動伝達板33及び第3の振動伝達板34が連結されている。
【0033】
第3の振動伝達板34の平面視(Z軸方向視)中央には、円形の回転用開口部34aが形成されており、この回転用開口部34aの中心軸は、振動モータユニット8のモータ出力軸81に対して同軸上に設定されている。
【0034】
回転用開口部34aの内径部の一部には、振動モータユニット8の偏芯軸部材83が当接しており、回転用開口部34aの中心軸に対して偏芯軸部材83の軸が偏芯している。
【0035】
ガイド部材38は、Y軸方向及びX軸方向に延びるガイド部材(例えばLMガイド(登録商標))を有しており、被ガイド部材39は、このガイド部材38に係合することにより、Y軸方向及びX軸方向にガイドされる。X軸方向用のガイド部材38は、固定板37に固定されている。固定板37は不図示のガイドによりSTCレーン1に沿ってX軸上を直線移動する。
【0036】
上述の構成において、振動モータユニット8を駆動してモータ出力軸81を回転させると、偏芯軸部材83が回転用開口部34aの内径部に当接しながらモータ出力軸81の軸周りに偏芯回転して、第3の振動伝達板34が振動する。第3の振動伝達板34の振動は、連結ピン36→第2の振動伝達板33→連結ピン35→第1の振動伝達板32の順に伝達され、最後に容器装着ポート31を振動させることができる。これにより、容器Aに収容された混合液を攪拌することができる。
【0037】
また、容器装着ポート31に容器Aを装着した状態で混合液を攪拌しているため、上述した第2の方法(把持機構で容器を把持する方法)よりも容器Aの姿勢が安定し、液漏れなどの不具合を無くすことができる。さらに、容器搬送ユニット3を振動させる際に、小型の振動モータユニットが一つあれば足りるため、低コスト化及び軽量化を図ることができる。
【0038】
またさらに、ガイド部材38及び被ガイド部材39の係合作用により、容器装着ポート31、第1の振動伝達板32、第2の振動伝達板33及び第3の振動伝達板34は、一つの剛体として、STCレーン1に沿って直線運動することだけに拘束された固定板37の動きとは独立に、水平面内(X軸及びY軸を含む平面内)で向きを変えることなく小さく旋回することとなる。いわば、水平円軌道上を通る並進運動である。振動モータユニット8の回転数の制御、偏芯軸部材の偏芯度の設計、載置する容器の形状と大きさ、容器Aに入れる液体の量や粘性など、多くのパラメータが存在するが、本発明によれば容器Aの姿勢が安定した再現性の高い振動状態が実現できる。したがって、前記パラメータを制御することにより攪拌の際の混合液の流出、飛散を的確に防止することができる。
【0039】
次に、自動分析装置の動作について検体の前処理を行う場合を例にとって説明する。まず、容器ラック(不図示)上にマトリクス状に載置された希釈・前処理用の容器Aおよび試薬入り反応容器を搬送アーム(不図示)によりそれぞれSTCレーン1の容器装着ポート31及びRTCレーン2上に載置する。
【0040】
装着ポート31に装着された容器Aは、容器搬送ユニット3により、メインレーンの分注位置に搬送される。次に、メインアーム5がY軸方向及びZ軸方向に移動して、装着ポート31に装着された容器A内に分注ノズル5aにより検体及び前処理試薬が注入される。
【0041】
次に、振動モータユニット8を駆動して、容器装着ポート31を振動させる。これにより、容器装着ポート31に装着された容器Aが振動し、容器A内の混合液を攪拌することができる。また、上述した第1の方法(混合液をノズルで吸引及び排出して攪拌する方法)、第3の方法(攪拌部材で攪拌する方法)よりも容器Aの停止時間を短くできるため、自動分析装置の処理速度を速めることができる。
【0042】
容器装着ポート31への加振が終了すると、容器搬送ユニット3がSTCレーン1の下流に搬送され、容器装着ポート31に装着された容器Aは、前処理反応用テーブル7に搬送される。
【0043】
前処理反応用テーブル7に搬送された容器Aは、約10分間回転され、STCレーン1の搬送方向下流に待機している容器搬送ユニット3により、容器受け渡し位置及びSTCレーン1上のメインレーンの分注位置を経て、ハイブリッドレーンと交わる載置位置に搬送され、分注ノズル4aによって中和剤が容器Aに添加される。その後、ただちに容器搬送ユニット3の加振手段によって容器A内の混合液が攪拌され、容器Aは再びSTCレーン1上のメインレーンの分注位置に搬送される。
【0044】
次に、メインアーム5をSTCレーン1の分注位置に移動させ、分注ノズル5aにより前処理反応用テーブル7から搬送された容器A内の混合液を吸引し、この混合液をRTCレーン2のメインレーン上の分注位置に待機している別の反応容器A内に注入する。
【0045】
そして、RTCレーン2を搬送方向上流に移動させ、当該反応容器Aをハイブリッドレーン上の分注位置に移動させ、ハイブリッドアーム4のカップトランスファ4bによりインキュベータテーブル6に搬送する。
(他の実施例)
上述の実施例では、容器搬送ユニット3の搬送動作を停止した状態で、容器Aを振動させたが、容器搬送ユニット3をSTCレーン1の下流に搬送させながら容器Aを振動させてもよい。これにより、自動分析装置の処理速度をさらに向上させることができる。
【0046】
上記実施形態は、請求項4に記載の「第1の位置と第2の位置との間で容器を移送する搬送手段を有する自動分析装置であって、移送可能な搬送ユニットと、前記搬送ユニットに振動を付与する加振手段とを有することを特徴とする自動分析装置」を具現化したものでもある。
【0047】
ここで、第1の位置は、液体を分注する位置であっても、液体を分注した容器を移送する位置であってもよい。また、第2の位置は、液体を分注する位置であっても、何らかの光学的な測定を行う位置であっても、また他の装置に容器を移送する位置であってもよい。
【0048】
さらに、容器は下記のものであってもよい。すなわち、空の容器に対して2種類以上の液体を分注してもよいし、凍結乾燥によって予め粉末状にした試薬を入れた容器に対して1種類の液体を分注してもよい。また、分注する液体は、必ずしも検体である必要はなく、単なる緩衝液であってもよいし、例えば2種類の試薬を粉末状にして入れてある容器であってもよい。
【図面の簡単な説明】
【0049】
【図1】自動分析装置の平面図である。
【図2】自動分析装置の機能ブロック図である。
【図3】容器搬送ユニットの概略図であり、(a)が平面図であり、(b)が側面図である。
【符号の説明】
【0050】
1 STCレーン(希釈・前処理容器搬送レーン)
2 RTCレーン(反応容器搬送レーン)
3 容器搬送ユニット
4 ハイブリッドアーム
4a 分注ノズル
4b カップトランスファ
5 メインアーム
5a 分注ノズル
6 インキュベータテーブル
7 前処理反応用テーブル
8 振動モータユニット
31 容器装着ポート
32 第1の振動伝達板
33 第2の振動伝達板
34 第3の振動伝達板
34a 回転用開口部
35 36 連結ピン
37 固定板
38 ガイド部材
39 被ガイド部材
51 STCレーン駆動モータユニット
52 RTCレーン駆動モータユニット
53 容器搬送モータユニット
54 ハイブリッドアーム駆動モータユニット
55 メインアーム駆動モータユニット
70 CPU
81 出力軸
82 カバー部材
83 偏芯軸部材
【特許請求の範囲】
【請求項1】
試薬入りまたは空の容器を貯蔵元から搬送して載置する載置位置と、前記試薬入りまたは空の容器に少なくとも検体及び必要な前処理試薬または希釈液を注入する分注処理を行うための分注位置と、前処理が必要な場合に前記分注処理後の前記容器を前処理反応用テーブルに搬送する搬送部への受け渡し位置と、の間で移動可能な搬送ユニットと、
前記搬送ユニットに振動を付与する加振手段と、
を有することを特徴とする自動分析装置。
【請求項2】
前記加振手段は、前記分注位置において、前記搬送ユニットに振動を付与することを特徴とする請求項1に記載の自動分析装置。
【請求項3】
前記加振手段は、前記容器受け渡し位置に前記容器を搬送する搬送途中で前記搬送ユニットに振動を付与することを特徴とする請求項1に記載の自動分析装置。
【請求項4】
第1の位置と第2の位置との間で容器を移送する搬送手段を有する自動分析装置であって、移送可能な搬送ユニットと、前記搬送ユニットに振動を付与する加振手段とを有することを特徴とする自動分析装置。
【請求項5】
前記搬送ユニットを水平面内で振動させるためのガイド部材を有することを特徴とする請求項1乃至4のうちいずれか一つに記載の自動分析装置。
【請求項6】
前記搬送ユニットは、前記容器に振動を伝達する振動伝達板を有しており、前記振動伝達板には、前記加振手段の出力回転軸に対して偏芯した偏芯軸部材を係合させる係合穴部が形成されていることを特徴とする請求項1乃至5のうちいずれか一つに記載の自動分析装置。
【請求項7】
前記係合穴部の中心軸は、前記加振手段の前記出力回転軸の同軸上に位置していることを特徴とする請求項6に記載の自動分析装置。
【請求項1】
試薬入りまたは空の容器を貯蔵元から搬送して載置する載置位置と、前記試薬入りまたは空の容器に少なくとも検体及び必要な前処理試薬または希釈液を注入する分注処理を行うための分注位置と、前処理が必要な場合に前記分注処理後の前記容器を前処理反応用テーブルに搬送する搬送部への受け渡し位置と、の間で移動可能な搬送ユニットと、
前記搬送ユニットに振動を付与する加振手段と、
を有することを特徴とする自動分析装置。
【請求項2】
前記加振手段は、前記分注位置において、前記搬送ユニットに振動を付与することを特徴とする請求項1に記載の自動分析装置。
【請求項3】
前記加振手段は、前記容器受け渡し位置に前記容器を搬送する搬送途中で前記搬送ユニットに振動を付与することを特徴とする請求項1に記載の自動分析装置。
【請求項4】
第1の位置と第2の位置との間で容器を移送する搬送手段を有する自動分析装置であって、移送可能な搬送ユニットと、前記搬送ユニットに振動を付与する加振手段とを有することを特徴とする自動分析装置。
【請求項5】
前記搬送ユニットを水平面内で振動させるためのガイド部材を有することを特徴とする請求項1乃至4のうちいずれか一つに記載の自動分析装置。
【請求項6】
前記搬送ユニットは、前記容器に振動を伝達する振動伝達板を有しており、前記振動伝達板には、前記加振手段の出力回転軸に対して偏芯した偏芯軸部材を係合させる係合穴部が形成されていることを特徴とする請求項1乃至5のうちいずれか一つに記載の自動分析装置。
【請求項7】
前記係合穴部の中心軸は、前記加振手段の前記出力回転軸の同軸上に位置していることを特徴とする請求項6に記載の自動分析装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−79944(P2009−79944A)
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願番号】特願2007−248285(P2007−248285)
【出願日】平成19年9月25日(2007.9.25)
【出願人】(000003300)東ソー株式会社 (1,901)
【Fターム(参考)】
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願日】平成19年9月25日(2007.9.25)
【出願人】(000003300)東ソー株式会社 (1,901)
【Fターム(参考)】
[ Back to top ]