
自動分析装置
【課題】実際の構成部品の動作と、モニタに表示される構成部品の動作とを一致させることにより、分析作業中に蓋部材を開けずに、構成部品の動作を確認することが可能な自動分析装置を提供する。
【解決手段】蓋部材と、試料容器、試薬容器及び反応容器をそれぞれ搬送させ、試料容器内の試料と試薬容器内の試薬とを反応容器に分注するための少なくとも複数の構成部品であって、蓋部材により外部から覆われる複数の構成部品と、複数の構成部品の搬送及び分注のための動作を制御する制御信号を出力する制御部と、モニタと、複数の構成部品の3次元形状及び位置に関するCADデータを有し、CADデータに基づく複数の構成部品の画像をモニタに表示させるとともに、制御信号を受けて、モニタに表示させた画像上の前記複数の構成部品を変化させる表示制御部と、を有する。
【解決手段】蓋部材と、試料容器、試薬容器及び反応容器をそれぞれ搬送させ、試料容器内の試料と試薬容器内の試薬とを反応容器に分注するための少なくとも複数の構成部品であって、蓋部材により外部から覆われる複数の構成部品と、複数の構成部品の搬送及び分注のための動作を制御する制御信号を出力する制御部と、モニタと、複数の構成部品の3次元形状及び位置に関するCADデータを有し、CADデータに基づく複数の構成部品の画像をモニタに表示させるとともに、制御信号を受けて、モニタに表示させた画像上の前記複数の構成部品を変化させる表示制御部と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、複数の試料容器に収容されている血液、尿等の試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置に関する。
【背景技術】
【0002】
従来、自動分析中に検体サンプリングアームや試薬分注アームなどの構成部品は、蓋部材により外部から覆われているため、構成部品の動作が外部から見られなくなり、自動分析の進み具合が判らない。例えば、設置した検体はサンプリングされたかどうかや、指定された試薬が吸引されているかどうかが、分析結果が上がって来るまでの間、例えば10分間は確認することができない。したがって、誤った種類の試薬容器を置いた場合でも、即座に、その誤作業に気が付かないこととなる。
【0003】
自動分析の進み具合を確認するために、蓋部材を開けた状態で自動分析の測定を行うと、埃の問題やエアコンからの風の入り込みなど、測定環境に悪影響を与えるため、自動分析の測定においては、蓋部材を閉じた状態にする必要がある。
【0004】
蓋部材で覆われた構成部品の動作を確認するために、蓋部材に透明部分を設ける技術がある。
【0005】
また、産業機器の動作状態をコンピュータ上でシミュレートできる従来の技術(例えば、特許文献1)としては、所定のCAD(Computer Aided Design)ソフトウェアから対象製品に係る設計データを取り出し、設計データを基に、対象製品の製造作業に係るファイルを作成し、ファイルを基に、対象製品の製造手順を示すアニメーションを作成し、アニメーションをモニタに出力する方法がある。この方法を利用すれば、自動分析装置の構成部品の設計データに基づき、構成部品の動作を示すアニメーションを作成し、アニメーションをモニタに出力することにより、自動分析の測定において、蓋部材を閉じた状態にしていても、構成部品の動作を視認可能となる。
【0006】
【特許文献1】特開2003−330971号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、蓋部材に透明部分を設ける技術では、例えば試薬の性質上、遮光が必要な場合には採用し難い。また、試薬庫は、複数の試薬容器を保管し、分注位置に試薬を移動する機構であるが、試薬庫の内部を保冷するために、蓋部材の内面に断熱部材を装着した場合にも採用し難い。さらに、蓋部材に透明部分を設ける技術は、強度の低下やコスト高の要因となるという問題点があった。
【0008】
また、上記特許文献1に記載された技術では、実際に製造されているときの対象製品の動作と、例えばモニタに出力された対象製品の動作とを一致させておらず、リアルタイムに試料容器や試薬容器の位置を確認することができず、例えば、分析作業中に、蓋部材が閉じられた状態では、種類の異なる試薬容器を誤って試薬庫に載置するなどの誤作業を確認することができないという問題点があった。
【0009】
この発明は、上記の問題を解決するものであり、構成部品の実際の動作と、モニタに表示される構成部品の動作とを一致させることにより、分析作業中に蓋部材を開けずに、また、蓋部材に透明部分を設けずに、分析作業中の構成部品の動作を確認可能とした自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するため、この発明は、実際の構成部品の動作と、モニタに表示される構成部品の動作とを一致させると、分析作業中に蓋部材を開けずに、構成部品の動作を確認することが可能となることに着目した。
【0011】
具体的に、この発明の第1の形態は、複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、蓋部材と、前記試料容器、前記試薬容器及び前記反応容器をそれぞれ搬送させ、前記試料容器内の前記試料と前記試薬容器内の前記試薬とを前記反応容器に分注するための少なくとも複数の構成部品であって、前記蓋部材により外部から覆われる複数の構成部品と、前記複数の構成部品の前記搬送及び前記分注のための動作を制御する制御信号を出力する制御部と、モニタと、前記複数の構成部品の3次元形状及び位置に関する画像データを記憶する記憶部と、前記記憶部から読み出した前記画像データに基づく前記複数の構成部品の画像を前記モニタに表示させるとともに、前記制御信号を受けて、前記モニタに表示させた画像上の前記複数の構成部品を変化させる表示制御部と、を有することを特徴とする自動分析装置ことを特徴とする自動分析装置である。
また、この発明の第2の形態は、複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、蓋部材と、複数の前記試料容器を並べた状態で載置する試料ラックと、前記試料ラックを所定方向に移動させることにより、前記複数の試料容器を順番に第1吸引位置に搬送する第1駆動部とを有する試料庫と、複数の前記試薬容器を並べた状態で載置する試薬容器と、前記試薬容器を所定方向に移動させることにより、前記複数の試薬容器を順番に第2吸引位置に搬送する第2駆動部とを有する試薬庫と、前記複数の反応容器を並べた状態で載置する反応ラインと、前記反応ラインを所定方向に移動させることにより、前記複数の反応容器を順番に第1吐出位置及び第2吐出位置に搬送する第3駆動部とを有する反応庫と、前記第1吸引位置と前記第1吐出位置との間を移動し、その先端部に試料プローブが設けられた試料アームと、前記第2吸引位置と前記第2吐出位置との間を移動し、その先端部に第1試薬プローブが設けられた試薬アームと、前記第1吸引位置に移動した前記試料プローブにより所定の前記試料容器から試料を吸引させた後に、前記第1吐出位置に移動した前記試料プローブにより所定の前記反応容器に試料を吐出させる試料吸排部と、前記第2吸引位置に移動した前記第1試薬プローブにより所定の前記試薬容器から試薬を吸引させた後に、前記第2吐出位置に移動した前記第1試薬プローブにより所定の前記反応容器に試薬を吐出させる試薬吸排部と、前記試料ラック、前記試料アーム、前記試料プローブ、前記試薬容器、前記試薬アーム、前記第1試薬プローブ、前記反応ラインを含み、前記蓋部材により外部から覆われる複数の構成部品の前記搬送、前記吸引及び前記吐出のための動作を制御する制御信号を出力する駆動制御部と、モニタと、前記複数の構成部品の3次元形状及び位置に関する画像データを記憶する記憶部と、前記記憶部から読み出した前記画像データに基づく前記複数の構成部品の画像を前記モニタに表示させるとともに、前記制御信号を受けて、前記モニタに表示させた画像上の前記複数の構成部品を変化させる表示制御部と、を有することを特徴とする自動分析装置である。
さらに、この発明の第3の形態は、複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、前記試料容器、前記試薬容器及び前記反応容器をそれぞれ搬送させ、前記試料容器内の前記試料と前記試薬容器内の前記試薬とを前記反応容器に分注するための少なくとも複数の構成部品であって、前記複数の構成部品の前記搬送及び前記分注のための動作を制御する制御信号を出力する制御部と、モニタと、前記複数の試料容器、前記複数の試薬容器、及び前記複数の反応容器のそれぞれを配置した画像データを記憶する記憶部と、前記記憶部から読み出した前記画像データを前記モニタに表示させるとともに、前記制御信号を受けて、該制御信号を受けた時点で前記分注に係わっている前記試料容器、前記試薬容器及び前記反応容器の画像を識別して前記モニタに表示させる表示制御部と、を有することを特徴とする自動分析装置である。
【発明の効果】
【0012】
この発明の第1の形態によると、モニタに表示させた構成部品の画像の位置の変化により、分析作業中に蓋部材を開けずに、構成部品の動作を確認することが可能となる。
【0013】
また、この発明の第2の形態によると、試料ラック、試料アーム、試料プローブ、試薬容器、試薬アーム、第1試薬プローブ及び反応ラインの各画像の位置の変化をモニタに表示させたので、分析作業中に蓋部材を開けずに、試料ラック上の試料容器や試薬容器上の試薬容器の位置を確認することが可能となる。
【0014】
さらに、この発明の第3の形態によると、分析作業中において、試料及び試薬の分注に係わっている試料容器、試薬容器及び反応容器を容易に確認することが可能となる。
【発明を実施するための最良の形態】
【0015】
(構成)
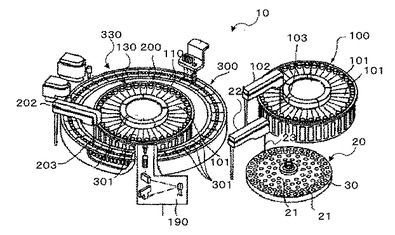
この発明の一実施形態に係る自動分析装置の構成について図1から図4を参照して説明する。図1は、自動分析装置の要部を示す斜視図、図2は、自動分析装置の機能ブロック図、図3は制御信号と構成部品の動作とを対応させた図、図4は構成部品の動作情報の説明図である。
【0016】
自動分析装置10は、複数の試料容器に収容されている血液、尿等の試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、試料に含まれる特定成分の分析を行う装置であって、試料容器、試薬容器及び反応容器をそれぞれ搬送させ、試料容器内の試料と試薬容器内の試薬とを反応容器に分注するための少なくとも複数の構成部品を有する。
【0017】
自動分析装置10は、試料(生体サンプル)を収容する試料容器21と、試料庫20と、試薬を収容する試薬容器101と、第1試薬庫100、第2試薬庫200と、複数の反応容器301と、反応庫300と、試料アーム22、第1試薬アーム102、第2試薬アーム202、試料プローブ23、第1試薬プローブ103、第2試薬プローブ203その他の構成部品を有する。
【0018】
なお、試料庫20の上部開口を覆うためのカバー、第1試薬庫100、第2試薬庫200の上部開口を覆うためのカバー及び反応庫300の上部開口を覆うためのカバーを省略し、庫内に配された構成部品を図1に示す。これらの構成部品は、分析作業中において、蓋部材(図示省略)により外部から覆われる。
【0019】
次に、試料庫20、第1試薬庫100、第2試薬庫200、反応庫300、試料アーム22、第1試薬アーム102、第2試薬アーム202、試料吸排部、及び試薬吸排部の順番に説明する。
【0020】
試料庫20は、複数の試料容器21を円周方向に並べた状態で載置するディスクサンプラである試料ラック30と、試料ラック30を円周方向に回転させることにより、複数の試料容器21を順番に第1吸引位置に搬送するステッピングモータを含む第1駆動部(図示省略)とを有する。試料容器21と、試料容器21の識別番号と、試料ラック30上の載置場所の番号と、試料容器21中の試料とを対応させて自動分析装置10に記憶させる。
【0021】
第1試薬庫100は、複数の試薬容器101を円周方向に並べた状態で載置する試薬容器130と、試薬容器130を円周方向に回転させることにより、複数の試薬容器101を順番に第2吸引位置に搬送する第2駆動部(図示省略)とを有する。第1試薬庫100の試薬容器101には、試料に含まれる特定成分に対して選択的に反応する試薬が収容されている。試薬容器101と、試薬容器101の識別番号と、試薬容器130上の載置場所の番号と、試薬容器101中の試料とを対応させて自動分析装置10に記憶させる。
【0022】
同じく、第2試薬庫200は、複数の試薬容器101を円周方向に並べた状態で載置する試薬容器130と、試薬容器130を円周方向に回転させることにより、複数の試薬容器101を順番に第2吸引位置に搬送するステッピングモータを含む第2駆動部(図示省略)とを有する。
【0023】
第2試薬庫200の試薬容器101には、前記第1試薬庫100の試薬容器101に収容されている試薬と対をなす試薬が収容されている。第1試薬庫100に係る第1試薬アーム102、第1試薬プローブ103が、第2試薬庫200に係る第2試薬アーム202、第2試薬プローブ203に相当する。
【0024】
反応庫300は、複数の反応容器301を円周方向に並べた状態で載置する反応ライン330と、反応ライン330を円周方向に回転させることにより、複数の反応容器301を順番に第1吐出位置及び第2吐出位置に搬送するステッピングモータを含む第3駆動部(図示省略)とを有する。反応容器301と、反応容器301の識別番号と、反応ライン330上の載置場所の番号とを対応させて自動分析装置10に記憶させる。反応容器301に分注した試料及び試薬を自動分析装置に記憶させても良い。
【0025】
試料アーム22の先端部には試料プローブ23が設けられている。試料アーム22を第1吸引位置と第1吐出位置との間で移動させるための電動モータを含む試料アーム駆動部(図示省略)が設けられている。
【0026】
第1試薬アーム102の先端部には第1試薬プローブ103が設けられている。第1試薬アーム102を第2吸引位置と第2吐出位置との間で移動させるための電動モータを含む第1試薬アーム駆動部(図示省略)が設けられている。
【0027】
試料プローブ23を下降及び上昇させるプローブ駆動部(図示省略)と、試料プローブ23により、試料を吸引及び吐出させるための第1ポンプ(図示省略)と、第1電磁弁(図示省略)と、第1電磁弁を駆動させるアクチュエータとを有する試料吸排部が設けられている。試料プローブ23が待機位置から第1吸引位置に移動すると、第1プローブ駆動部が試料プローブ23を下降させる。第1電磁弁が作動して、試料プローブ23により所定の試料容器21から試料を吸引させる。
【0028】
次に、第1電磁弁が作動し、第1プローブ駆動部が試料プローブ23を上昇させる。試料プローブ23が第1吸引位置から第1吐出位置に移動すると、第1プローブ駆動部が試料プローブ23を下降させる。第1電磁弁が作動して、試料プローブ23により所定の反応容器301に試料を吐出させる。次に、第1電磁弁が作動し閉じ、第1プローブ駆動部が試料プローブ23を上昇させる。試料プローブ23が第1吐出位置から待機位置に移動する。
【0029】
第1試薬プローブ103を下降及び上昇させる第2プローブ駆動部(図示省略)と、第1試薬プローブ103により、試薬を吸引及び吐出させるための第2ポンプ(図示省略)と、第2電磁弁(図示省略)と、電磁弁を駆動させるアクチュエータ(図示省略)とを有する試薬吸排部が設けられている。第1試薬プローブ103が待機位置から第2吸引位置に移動すると、第2プローブ駆動部が第1試薬プローブ103を下降させる。第2電磁弁が作動して、第1試薬プローブ103により所定の試薬容器101から試薬を吸引させる。
【0030】
次に、第2電磁弁が作動し、第2プローブ駆動部が第1試薬プローブ103を上昇させる。第1試薬プローブ103が第2吸引位置から第2吐出位置に移動すると、第2プローブ駆動部が第1試薬プローブ103を下降させる。第2電磁弁が作動して、第1試薬プローブ103により所定の反応容器301に試料を吐出させる。次に、第2電磁弁が作動し、第2プローブ駆動部が第1試薬プローブ103を上昇させる。第1試薬プローブ103が第2吐出位置から待機位置に移動する。
【0031】
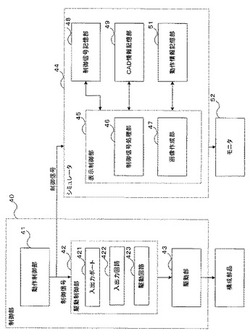
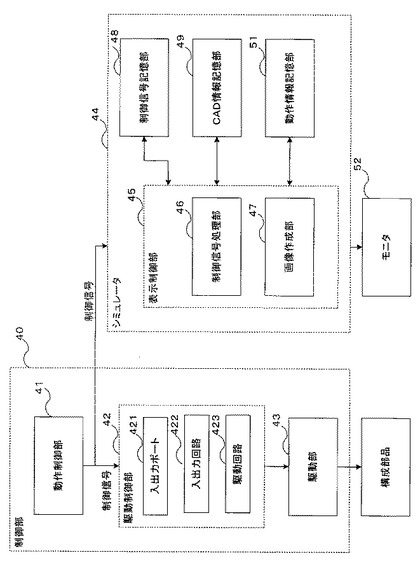
次に、自動分析装置の構成部品の動作と、モニタに表示させた構成部品の画像の変化との関係について、図2を参照にして説明する。図2は、自動分析装置の機能ブロック図である。
【0032】
なお、図2において、駆動部43とは、上記する試料ラック30を駆動するための第1駆動部、試薬容器130を駆動するための第2駆動部、反応ライン330を駆動するための第3駆動部、試料アーム22を駆動するための試料アーム駆動部、第1試薬アーム102を駆動するための第1試薬アーム駆動部、試料プローブ23を駆動するための第1プローブ駆動部、第1試薬プローブ103を駆動するための第2プローブ駆動部、第1電磁弁を駆動するためのアクチュエータ、及び第2電磁弁を駆動するためのアクチュエータを含むものである。
【0033】
構成部品の動作を制御する制御信号を出力する制御部40は、動作制御部41、駆動制御部42及び駆動部43を有する。
動作制御部41は、分析作業のプログラムが記憶されたROM(リードオンリーメモリー)、該プログラムを実行するためのRAM(ランダムアクセスメモリー)及びCPUを有している。
【0034】
駆動制御部42の入出力ポート421は、動作制御部41からの制御信号を受ける。ここで、制御信号とは、複数の構成部品の搬送および分注のための動作を制御する信号であって、制御信号には、構成部品のポート番号、及び構成部品の動作量が含まれている。
【0035】
入出力回路422は制御信号を各駆動回路423に送り、各駆動回路423は、駆動部43に駆動制御情報を出力する。駆動部43は、駆動制御情報を受けて、試料ラック30、試料アーム22、試料プローブ23、試薬容器130、第1試薬アーム102、第1試薬プローブ103、反応ライン330、第1電磁弁、及び第2電磁弁を含む構成部品を駆動させる。
【0036】
シミュレータ44は、表示制御部45及び記憶部を有する。表示制御部45は、制御信号処理部46及び画像作成部47を有する。また、記憶部は、制御信号記憶部48、CAD情報記憶部49及び動作情報記憶部51を有する。
【0037】
また、表示制御部45の画像作成部47は、構成部品の3次元形状及び位置に関する初期値をCAD情報記憶部49から読み出し、構成部品の画像を作成する。表示制御部45は、構成部品の画像の表示情報をCRTや液晶パネルなどのモニタ52に出力する。なお、モニタ52に表示される初期値に係る構成部品の画像の位置は、分析作業開始前の構成部品の位置と一致している。
【0038】
また、シミュレータ44は、動作制御部41からの制御信号を受ける。制御信号を受けると、表示制御部45の制御信号処理部46が、制御信号に対応する構成部品の動作情報を制御信号記憶部48から読み出す。
【0039】
なお、前記シミュレータ44が受ける制御信号として、動作制御部41から出力された
制御信号を示したが、これに限らない。例えば、前記シミュレータ44が受ける制御信号として、入出力ポート421、入出力回路422、駆動回路423及び駆動部43からそれぞれ出力される制御信号であっても良い。
【0040】
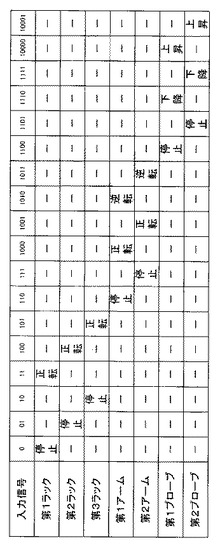
次に、制御信号と構成部品の動作との対応関係について図3を参照にして説明する。図3は、制御信号と構成部品の動作とを対応させた図である。
【0041】
図3では、一つの制御信号と一つの構成部品の動作とを対応させている。制御信号「0」、「01」、「10」は、試料ラック30の停止、試薬容器130の停止、反応ライン330の停止に対応させている。これに限らず、一つの制御信号と複数の構成部品の動作とを対応させても良い。
【0042】
また、図3では、構成部品として、試料ラック30〜第1試薬プローブ103を示したが、分析作業中において、その動作を確認すべき構成部品であって、蓋部材やカバーで覆われていて外部からその動作を確認できない又確認し難い構成部品であれば良い。
【0043】
画像作成部47は、制御信号処理部46によって読み出された構成部品の動作情報に基づき、その動作内容を動作情報記憶部51から読み出す。また、画像作成部47は、構成部品の3次元形状情報(CAD情報)をCAD情報記憶部49から読み出す。画像作成部47は、構成部品の動作内容及び構成部品の3次元形状情報(CAD情報)から構成部品の画像を作成する。
【0044】
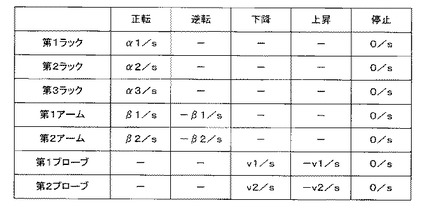
次に、構成部品の動作内容について図4を参照にして説明する。図4は、構成部品の動作内容の説明図である。
【0045】
図4では、構成部品の動作に対して、その動作内容を対応させている。試料ラック30、試薬容器130、反応ライン330、試料アーム22及び第1試薬アーム102の各動作である「正転」は、角速度「α1/s」、「α2/s」、「α3/s」、「β1/s」及び「β2/s」である。この角速度は、駆動部43が上記試料ラック30等を駆動させる角速度と一致する。
【0046】
また、試料プローブ23及び第1試薬プローブ103の各動作である「下降」は、速度「v1/s」及び「v2/s」である。この速度は、駆動部43が上記試料プローブ23等を駆動させる速度と一致する。なお、試料ラック30等の動作である「停止」は、速度「0/s」である。
【0047】
画像作成部47は、構成部品の動作内容及び構成部品の3次元形状情報(CAD情報)から、単位時間毎にその位置を変化させた構成部品の画像を作成する。表示制御部45は、作成された構成部品の画像を表示情報としてモニタ52に出力する。それにより、駆動部43により駆動される構成部品の実際の動作と、モニタ52に表示される構成部品の動作とを一致させることが可能となる。その結果、分析作業中に蓋部材(図示省略)を開けずに、また、蓋部材に透明部分を設けずに、分析作業中の構成部品の動作を確認することが可能となる。
【0048】
例えば、試料ラック30、試薬容器130及び反応ライン330がそれぞれ所定角度回転することで、所定の試料容器21、試薬容器101及び反応容器301が所定位置に送られたことを確認可能となる。また、試料プローブ23及び第1試薬プローブ103が下降することで、所定の試料及び試薬が吸引又は吐出されたことを確認可能となる。
【0049】
(動作)
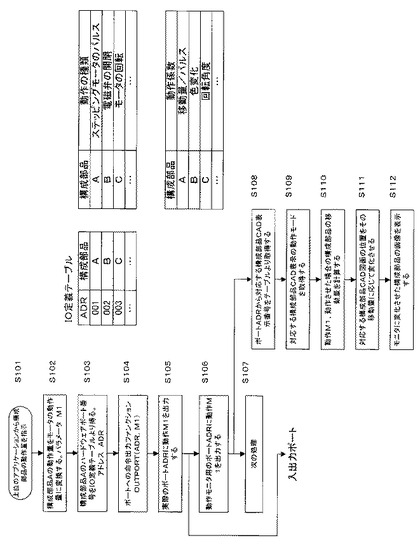
次に、シミュレータ44等の動作について図5を参照にして説明する。図5は、駆動制御部42及びシミュレータ44が制御信号を受け、シミュレータ44が制御信号に基づき構成部品の画像をモニタに表示するフロー図である。なお、前述したように、制御信号には、動作すべき構成部品のポート番号、及び構成部品の動作量が含まれる。
【0050】
先ず、上位のアプリケーションから構成部品の動作量を指示する(ステップS101)。次に、例えば、構成部品Aの動作量を変換する(ステップS102)。ここでは、例えば、モータの動作量に変換する(パラメータ:M1)。次に、構成部品Aのハードウェアポート番号をIO定義テーブルより得る(ステップS103)。次に、当該ポートへ命令を出力する(ステップS104)。それにより、実際の駆動制御部42のポートADRである入出力ポート421に動作M1を出力する(ステップS105)。
【0051】
次に、シミュレータ44の動作モニタ用のポートADRである制御信号処理部46に動作M1を出力する(ステップS106)。続いて、次の処理を行う(ステップS107)。
【0052】
シミュレータ44の制御信号処理部46は、ポートADRから対応する構成部品のCAD表示番号をテーブルにより取得する(ステップS108)。このテーブルはCAD情報記憶部49に記憶されている。次に、制御信号処理部46は、対応する構成部品CAD表示の動作モードを取得する(ステップS109)。動作モードは、動作の種類のテーブルとして動作情報記憶部51に記憶される。動作の種類のテーブルを図5に示す。
【0053】
次に、画像作成部47は、動作M1、動作させた場合の構成部品の移動量を計算する(ステップS110)。構成部品の移動量の計算には動作係数が用いられる。動作係数のテーブルは、動作情報記憶部51に記憶される。動作係数のテーブルを図5に示す。ステッピングモータの移動量の計算には、移動量/パルスが用いられる。また、試料プローブ23の吸引及び吐出の動作には、その画像の色変化が用いられる。第1試薬プローブ103の吸引及び吐出の動作には、その画像の色変化が用いられる。画像の色変化により、試料や試薬の動作を確認することが可能となる。さらに、電動モータの動作には回転角度が用いられる。画像作成部47は、動作情報記憶部51に記憶された動作内容の情報に基づき、移動量を計算する。次に、画像作成部47は、対応する構成部品CAD図面の位置をその移動量に応じて変化させる(ステップS111)。
【0054】
次に、表示制御部45は、変化させた構成部品の画像をモニタ52に表示させる(ステップS112)。
【0055】
画像上で、例えば、試料ラック30、試薬容器130、及び反応ライン330を変化させることにより、試料容器21、試薬容器101及び反応容器301の搬送を確認することが可能となる。
【0056】
また、画像上の試料容器21、試薬容器101、反応容器301を例えばカーソルにより指定することにより、試料容器21内の試料の情報、反応容器301内の試薬の情報、反応容器301内の試料及び試薬の各情報をモニタ52に表示可能となる。それにより、例えば、種類の異なる試薬容器101を試薬容器130に載置した誤作業を、分析作業中に蓋部材を閉じた状態であっても、確認することができる。
【0057】
さらに、試料プローブ23の画像の色を変化させることにより、試料の吸引及び吐出の動作を確認することが可能となる。さらに、第1試薬プローブ103の画像の色を変化させることにより、試薬の吸引及び吐出の動作を確認することが可能となる。
【0058】
なお、前記実施形態では、構成部品の3次元形状及び位置に関するCADデータに基づき構成部品の画像を作成し、該画像をモニタ52に表示させた。これに限らず、シミュレータ44が、複数の試料容器21、複数の試薬容器101、及び複数の反応容器301の各容器の2次元又は3次元形状及び各容器の位置に関するデータを有し、その形状データ及び位置データに基づき、複数の試料容器21、複数の試薬容器101、複数の反応容器301をそれぞれ配置した画像をモニタ52に表示させるようにしても良い。
【0059】
さらに、シミュレータ44が、制御部40からの制御信号を受けて、制御信号を受けた時点に分注に係わっている試料容器21、試薬容器101及び反応容器301の画像をモニタ52に表示させるようにしても良い。それにより、分析作業中において、蓋部材を閉じたままで、試料及び試薬の分注に係わっている試料容器、試薬容器及び反応容器を容易に確認することが可能となる。
【0060】
さらに、実施形態では、構成部品の3次元形状及び位置に関するCADデータに基づき構成部品の画像を作成したが、CADデータに基づく画像に限らず、構成部品を模式化あるいは簡素化した画像データ、カメラなどで撮影した画像データを用いても良い。
【0061】
さらに、操作部、及び試料容器21内の試料内容についての情報、試薬容器101内の試薬内容についての情報を記憶する記憶部を有し、モニタ52に表示されている複数の試料容器21、複数の試薬容器101、複数の反応容器301の画像の1つを操作部により指定すると、シミュレータ44が、指定された試料容器21内の試料内容についての情報、試薬容器101内の試薬内容についての情報、反応容器301内の試料内容及び試薬内容についての情報を記憶部から読み出し、読み出した情報をモニタ52に表示させるようにしても良い。それにより、分析作業中に、蓋部材を閉じたままで、モニタ52上で、各容器内の試料又は試薬を容易に確認することが可能となる。
【図面の簡単な説明】
【0062】
【図1】この発明の一実施形態に係る自動分析装置の要部を示す斜視図である。
【図2】自動分析装置の機能ブロック図である。
【図3】制御信号と構成部品の動作とを対応させた図である。
【図4】構成部品の動作情報の説明図である。
【図5】駆動制御部及びシミュレータが制御信号を受け、シミュレータが制御信号に基づき構成部品の画像をモニタに表示するフロー図である。
【符号の説明】
【0063】
10 自動分析装置 20 試料庫 21 試料容器 22 試料アーム
23 試料プローブ 30 試料ラック 40 制御部 41 動作制御部
42 駆動制御部 43 駆動部 44 シミュレータ 45 表示制御部
46 制御信号処理部 47 画像作成部 48 制御信号記憶部
49 CAD情報記憶部 51 動作情報記憶部 52 モニタ
100 第1試薬庫 101 試薬容器 102 第1試薬アーム
103 第1試薬プローブ 110 試薬庫ケース 130 試薬容器
190 測定部 200 第2試薬庫 202 第2試薬アーム
203 第2試薬プローブ 300 反応庫 301 反応容器
330 反応ライン 421 入出力ポート 422 入出力回路
423 駆動回路
【技術分野】
【0001】
この発明は、複数の試料容器に収容されている血液、尿等の試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置に関する。
【背景技術】
【0002】
従来、自動分析中に検体サンプリングアームや試薬分注アームなどの構成部品は、蓋部材により外部から覆われているため、構成部品の動作が外部から見られなくなり、自動分析の進み具合が判らない。例えば、設置した検体はサンプリングされたかどうかや、指定された試薬が吸引されているかどうかが、分析結果が上がって来るまでの間、例えば10分間は確認することができない。したがって、誤った種類の試薬容器を置いた場合でも、即座に、その誤作業に気が付かないこととなる。
【0003】
自動分析の進み具合を確認するために、蓋部材を開けた状態で自動分析の測定を行うと、埃の問題やエアコンからの風の入り込みなど、測定環境に悪影響を与えるため、自動分析の測定においては、蓋部材を閉じた状態にする必要がある。
【0004】
蓋部材で覆われた構成部品の動作を確認するために、蓋部材に透明部分を設ける技術がある。
【0005】
また、産業機器の動作状態をコンピュータ上でシミュレートできる従来の技術(例えば、特許文献1)としては、所定のCAD(Computer Aided Design)ソフトウェアから対象製品に係る設計データを取り出し、設計データを基に、対象製品の製造作業に係るファイルを作成し、ファイルを基に、対象製品の製造手順を示すアニメーションを作成し、アニメーションをモニタに出力する方法がある。この方法を利用すれば、自動分析装置の構成部品の設計データに基づき、構成部品の動作を示すアニメーションを作成し、アニメーションをモニタに出力することにより、自動分析の測定において、蓋部材を閉じた状態にしていても、構成部品の動作を視認可能となる。
【0006】
【特許文献1】特開2003−330971号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、蓋部材に透明部分を設ける技術では、例えば試薬の性質上、遮光が必要な場合には採用し難い。また、試薬庫は、複数の試薬容器を保管し、分注位置に試薬を移動する機構であるが、試薬庫の内部を保冷するために、蓋部材の内面に断熱部材を装着した場合にも採用し難い。さらに、蓋部材に透明部分を設ける技術は、強度の低下やコスト高の要因となるという問題点があった。
【0008】
また、上記特許文献1に記載された技術では、実際に製造されているときの対象製品の動作と、例えばモニタに出力された対象製品の動作とを一致させておらず、リアルタイムに試料容器や試薬容器の位置を確認することができず、例えば、分析作業中に、蓋部材が閉じられた状態では、種類の異なる試薬容器を誤って試薬庫に載置するなどの誤作業を確認することができないという問題点があった。
【0009】
この発明は、上記の問題を解決するものであり、構成部品の実際の動作と、モニタに表示される構成部品の動作とを一致させることにより、分析作業中に蓋部材を開けずに、また、蓋部材に透明部分を設けずに、分析作業中の構成部品の動作を確認可能とした自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するため、この発明は、実際の構成部品の動作と、モニタに表示される構成部品の動作とを一致させると、分析作業中に蓋部材を開けずに、構成部品の動作を確認することが可能となることに着目した。
【0011】
具体的に、この発明の第1の形態は、複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、蓋部材と、前記試料容器、前記試薬容器及び前記反応容器をそれぞれ搬送させ、前記試料容器内の前記試料と前記試薬容器内の前記試薬とを前記反応容器に分注するための少なくとも複数の構成部品であって、前記蓋部材により外部から覆われる複数の構成部品と、前記複数の構成部品の前記搬送及び前記分注のための動作を制御する制御信号を出力する制御部と、モニタと、前記複数の構成部品の3次元形状及び位置に関する画像データを記憶する記憶部と、前記記憶部から読み出した前記画像データに基づく前記複数の構成部品の画像を前記モニタに表示させるとともに、前記制御信号を受けて、前記モニタに表示させた画像上の前記複数の構成部品を変化させる表示制御部と、を有することを特徴とする自動分析装置ことを特徴とする自動分析装置である。
また、この発明の第2の形態は、複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、蓋部材と、複数の前記試料容器を並べた状態で載置する試料ラックと、前記試料ラックを所定方向に移動させることにより、前記複数の試料容器を順番に第1吸引位置に搬送する第1駆動部とを有する試料庫と、複数の前記試薬容器を並べた状態で載置する試薬容器と、前記試薬容器を所定方向に移動させることにより、前記複数の試薬容器を順番に第2吸引位置に搬送する第2駆動部とを有する試薬庫と、前記複数の反応容器を並べた状態で載置する反応ラインと、前記反応ラインを所定方向に移動させることにより、前記複数の反応容器を順番に第1吐出位置及び第2吐出位置に搬送する第3駆動部とを有する反応庫と、前記第1吸引位置と前記第1吐出位置との間を移動し、その先端部に試料プローブが設けられた試料アームと、前記第2吸引位置と前記第2吐出位置との間を移動し、その先端部に第1試薬プローブが設けられた試薬アームと、前記第1吸引位置に移動した前記試料プローブにより所定の前記試料容器から試料を吸引させた後に、前記第1吐出位置に移動した前記試料プローブにより所定の前記反応容器に試料を吐出させる試料吸排部と、前記第2吸引位置に移動した前記第1試薬プローブにより所定の前記試薬容器から試薬を吸引させた後に、前記第2吐出位置に移動した前記第1試薬プローブにより所定の前記反応容器に試薬を吐出させる試薬吸排部と、前記試料ラック、前記試料アーム、前記試料プローブ、前記試薬容器、前記試薬アーム、前記第1試薬プローブ、前記反応ラインを含み、前記蓋部材により外部から覆われる複数の構成部品の前記搬送、前記吸引及び前記吐出のための動作を制御する制御信号を出力する駆動制御部と、モニタと、前記複数の構成部品の3次元形状及び位置に関する画像データを記憶する記憶部と、前記記憶部から読み出した前記画像データに基づく前記複数の構成部品の画像を前記モニタに表示させるとともに、前記制御信号を受けて、前記モニタに表示させた画像上の前記複数の構成部品を変化させる表示制御部と、を有することを特徴とする自動分析装置である。
さらに、この発明の第3の形態は、複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、前記試料容器、前記試薬容器及び前記反応容器をそれぞれ搬送させ、前記試料容器内の前記試料と前記試薬容器内の前記試薬とを前記反応容器に分注するための少なくとも複数の構成部品であって、前記複数の構成部品の前記搬送及び前記分注のための動作を制御する制御信号を出力する制御部と、モニタと、前記複数の試料容器、前記複数の試薬容器、及び前記複数の反応容器のそれぞれを配置した画像データを記憶する記憶部と、前記記憶部から読み出した前記画像データを前記モニタに表示させるとともに、前記制御信号を受けて、該制御信号を受けた時点で前記分注に係わっている前記試料容器、前記試薬容器及び前記反応容器の画像を識別して前記モニタに表示させる表示制御部と、を有することを特徴とする自動分析装置である。
【発明の効果】
【0012】
この発明の第1の形態によると、モニタに表示させた構成部品の画像の位置の変化により、分析作業中に蓋部材を開けずに、構成部品の動作を確認することが可能となる。
【0013】
また、この発明の第2の形態によると、試料ラック、試料アーム、試料プローブ、試薬容器、試薬アーム、第1試薬プローブ及び反応ラインの各画像の位置の変化をモニタに表示させたので、分析作業中に蓋部材を開けずに、試料ラック上の試料容器や試薬容器上の試薬容器の位置を確認することが可能となる。
【0014】
さらに、この発明の第3の形態によると、分析作業中において、試料及び試薬の分注に係わっている試料容器、試薬容器及び反応容器を容易に確認することが可能となる。
【発明を実施するための最良の形態】
【0015】
(構成)
この発明の一実施形態に係る自動分析装置の構成について図1から図4を参照して説明する。図1は、自動分析装置の要部を示す斜視図、図2は、自動分析装置の機能ブロック図、図3は制御信号と構成部品の動作とを対応させた図、図4は構成部品の動作情報の説明図である。
【0016】
自動分析装置10は、複数の試料容器に収容されている血液、尿等の試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、試料に含まれる特定成分の分析を行う装置であって、試料容器、試薬容器及び反応容器をそれぞれ搬送させ、試料容器内の試料と試薬容器内の試薬とを反応容器に分注するための少なくとも複数の構成部品を有する。
【0017】
自動分析装置10は、試料(生体サンプル)を収容する試料容器21と、試料庫20と、試薬を収容する試薬容器101と、第1試薬庫100、第2試薬庫200と、複数の反応容器301と、反応庫300と、試料アーム22、第1試薬アーム102、第2試薬アーム202、試料プローブ23、第1試薬プローブ103、第2試薬プローブ203その他の構成部品を有する。
【0018】
なお、試料庫20の上部開口を覆うためのカバー、第1試薬庫100、第2試薬庫200の上部開口を覆うためのカバー及び反応庫300の上部開口を覆うためのカバーを省略し、庫内に配された構成部品を図1に示す。これらの構成部品は、分析作業中において、蓋部材(図示省略)により外部から覆われる。
【0019】
次に、試料庫20、第1試薬庫100、第2試薬庫200、反応庫300、試料アーム22、第1試薬アーム102、第2試薬アーム202、試料吸排部、及び試薬吸排部の順番に説明する。
【0020】
試料庫20は、複数の試料容器21を円周方向に並べた状態で載置するディスクサンプラである試料ラック30と、試料ラック30を円周方向に回転させることにより、複数の試料容器21を順番に第1吸引位置に搬送するステッピングモータを含む第1駆動部(図示省略)とを有する。試料容器21と、試料容器21の識別番号と、試料ラック30上の載置場所の番号と、試料容器21中の試料とを対応させて自動分析装置10に記憶させる。
【0021】
第1試薬庫100は、複数の試薬容器101を円周方向に並べた状態で載置する試薬容器130と、試薬容器130を円周方向に回転させることにより、複数の試薬容器101を順番に第2吸引位置に搬送する第2駆動部(図示省略)とを有する。第1試薬庫100の試薬容器101には、試料に含まれる特定成分に対して選択的に反応する試薬が収容されている。試薬容器101と、試薬容器101の識別番号と、試薬容器130上の載置場所の番号と、試薬容器101中の試料とを対応させて自動分析装置10に記憶させる。
【0022】
同じく、第2試薬庫200は、複数の試薬容器101を円周方向に並べた状態で載置する試薬容器130と、試薬容器130を円周方向に回転させることにより、複数の試薬容器101を順番に第2吸引位置に搬送するステッピングモータを含む第2駆動部(図示省略)とを有する。
【0023】
第2試薬庫200の試薬容器101には、前記第1試薬庫100の試薬容器101に収容されている試薬と対をなす試薬が収容されている。第1試薬庫100に係る第1試薬アーム102、第1試薬プローブ103が、第2試薬庫200に係る第2試薬アーム202、第2試薬プローブ203に相当する。
【0024】
反応庫300は、複数の反応容器301を円周方向に並べた状態で載置する反応ライン330と、反応ライン330を円周方向に回転させることにより、複数の反応容器301を順番に第1吐出位置及び第2吐出位置に搬送するステッピングモータを含む第3駆動部(図示省略)とを有する。反応容器301と、反応容器301の識別番号と、反応ライン330上の載置場所の番号とを対応させて自動分析装置10に記憶させる。反応容器301に分注した試料及び試薬を自動分析装置に記憶させても良い。
【0025】
試料アーム22の先端部には試料プローブ23が設けられている。試料アーム22を第1吸引位置と第1吐出位置との間で移動させるための電動モータを含む試料アーム駆動部(図示省略)が設けられている。
【0026】
第1試薬アーム102の先端部には第1試薬プローブ103が設けられている。第1試薬アーム102を第2吸引位置と第2吐出位置との間で移動させるための電動モータを含む第1試薬アーム駆動部(図示省略)が設けられている。
【0027】
試料プローブ23を下降及び上昇させるプローブ駆動部(図示省略)と、試料プローブ23により、試料を吸引及び吐出させるための第1ポンプ(図示省略)と、第1電磁弁(図示省略)と、第1電磁弁を駆動させるアクチュエータとを有する試料吸排部が設けられている。試料プローブ23が待機位置から第1吸引位置に移動すると、第1プローブ駆動部が試料プローブ23を下降させる。第1電磁弁が作動して、試料プローブ23により所定の試料容器21から試料を吸引させる。
【0028】
次に、第1電磁弁が作動し、第1プローブ駆動部が試料プローブ23を上昇させる。試料プローブ23が第1吸引位置から第1吐出位置に移動すると、第1プローブ駆動部が試料プローブ23を下降させる。第1電磁弁が作動して、試料プローブ23により所定の反応容器301に試料を吐出させる。次に、第1電磁弁が作動し閉じ、第1プローブ駆動部が試料プローブ23を上昇させる。試料プローブ23が第1吐出位置から待機位置に移動する。
【0029】
第1試薬プローブ103を下降及び上昇させる第2プローブ駆動部(図示省略)と、第1試薬プローブ103により、試薬を吸引及び吐出させるための第2ポンプ(図示省略)と、第2電磁弁(図示省略)と、電磁弁を駆動させるアクチュエータ(図示省略)とを有する試薬吸排部が設けられている。第1試薬プローブ103が待機位置から第2吸引位置に移動すると、第2プローブ駆動部が第1試薬プローブ103を下降させる。第2電磁弁が作動して、第1試薬プローブ103により所定の試薬容器101から試薬を吸引させる。
【0030】
次に、第2電磁弁が作動し、第2プローブ駆動部が第1試薬プローブ103を上昇させる。第1試薬プローブ103が第2吸引位置から第2吐出位置に移動すると、第2プローブ駆動部が第1試薬プローブ103を下降させる。第2電磁弁が作動して、第1試薬プローブ103により所定の反応容器301に試料を吐出させる。次に、第2電磁弁が作動し、第2プローブ駆動部が第1試薬プローブ103を上昇させる。第1試薬プローブ103が第2吐出位置から待機位置に移動する。
【0031】
次に、自動分析装置の構成部品の動作と、モニタに表示させた構成部品の画像の変化との関係について、図2を参照にして説明する。図2は、自動分析装置の機能ブロック図である。
【0032】
なお、図2において、駆動部43とは、上記する試料ラック30を駆動するための第1駆動部、試薬容器130を駆動するための第2駆動部、反応ライン330を駆動するための第3駆動部、試料アーム22を駆動するための試料アーム駆動部、第1試薬アーム102を駆動するための第1試薬アーム駆動部、試料プローブ23を駆動するための第1プローブ駆動部、第1試薬プローブ103を駆動するための第2プローブ駆動部、第1電磁弁を駆動するためのアクチュエータ、及び第2電磁弁を駆動するためのアクチュエータを含むものである。
【0033】
構成部品の動作を制御する制御信号を出力する制御部40は、動作制御部41、駆動制御部42及び駆動部43を有する。
動作制御部41は、分析作業のプログラムが記憶されたROM(リードオンリーメモリー)、該プログラムを実行するためのRAM(ランダムアクセスメモリー)及びCPUを有している。
【0034】
駆動制御部42の入出力ポート421は、動作制御部41からの制御信号を受ける。ここで、制御信号とは、複数の構成部品の搬送および分注のための動作を制御する信号であって、制御信号には、構成部品のポート番号、及び構成部品の動作量が含まれている。
【0035】
入出力回路422は制御信号を各駆動回路423に送り、各駆動回路423は、駆動部43に駆動制御情報を出力する。駆動部43は、駆動制御情報を受けて、試料ラック30、試料アーム22、試料プローブ23、試薬容器130、第1試薬アーム102、第1試薬プローブ103、反応ライン330、第1電磁弁、及び第2電磁弁を含む構成部品を駆動させる。
【0036】
シミュレータ44は、表示制御部45及び記憶部を有する。表示制御部45は、制御信号処理部46及び画像作成部47を有する。また、記憶部は、制御信号記憶部48、CAD情報記憶部49及び動作情報記憶部51を有する。
【0037】
また、表示制御部45の画像作成部47は、構成部品の3次元形状及び位置に関する初期値をCAD情報記憶部49から読み出し、構成部品の画像を作成する。表示制御部45は、構成部品の画像の表示情報をCRTや液晶パネルなどのモニタ52に出力する。なお、モニタ52に表示される初期値に係る構成部品の画像の位置は、分析作業開始前の構成部品の位置と一致している。
【0038】
また、シミュレータ44は、動作制御部41からの制御信号を受ける。制御信号を受けると、表示制御部45の制御信号処理部46が、制御信号に対応する構成部品の動作情報を制御信号記憶部48から読み出す。
【0039】
なお、前記シミュレータ44が受ける制御信号として、動作制御部41から出力された
制御信号を示したが、これに限らない。例えば、前記シミュレータ44が受ける制御信号として、入出力ポート421、入出力回路422、駆動回路423及び駆動部43からそれぞれ出力される制御信号であっても良い。
【0040】
次に、制御信号と構成部品の動作との対応関係について図3を参照にして説明する。図3は、制御信号と構成部品の動作とを対応させた図である。
【0041】
図3では、一つの制御信号と一つの構成部品の動作とを対応させている。制御信号「0」、「01」、「10」は、試料ラック30の停止、試薬容器130の停止、反応ライン330の停止に対応させている。これに限らず、一つの制御信号と複数の構成部品の動作とを対応させても良い。
【0042】
また、図3では、構成部品として、試料ラック30〜第1試薬プローブ103を示したが、分析作業中において、その動作を確認すべき構成部品であって、蓋部材やカバーで覆われていて外部からその動作を確認できない又確認し難い構成部品であれば良い。
【0043】
画像作成部47は、制御信号処理部46によって読み出された構成部品の動作情報に基づき、その動作内容を動作情報記憶部51から読み出す。また、画像作成部47は、構成部品の3次元形状情報(CAD情報)をCAD情報記憶部49から読み出す。画像作成部47は、構成部品の動作内容及び構成部品の3次元形状情報(CAD情報)から構成部品の画像を作成する。
【0044】
次に、構成部品の動作内容について図4を参照にして説明する。図4は、構成部品の動作内容の説明図である。
【0045】
図4では、構成部品の動作に対して、その動作内容を対応させている。試料ラック30、試薬容器130、反応ライン330、試料アーム22及び第1試薬アーム102の各動作である「正転」は、角速度「α1/s」、「α2/s」、「α3/s」、「β1/s」及び「β2/s」である。この角速度は、駆動部43が上記試料ラック30等を駆動させる角速度と一致する。
【0046】
また、試料プローブ23及び第1試薬プローブ103の各動作である「下降」は、速度「v1/s」及び「v2/s」である。この速度は、駆動部43が上記試料プローブ23等を駆動させる速度と一致する。なお、試料ラック30等の動作である「停止」は、速度「0/s」である。
【0047】
画像作成部47は、構成部品の動作内容及び構成部品の3次元形状情報(CAD情報)から、単位時間毎にその位置を変化させた構成部品の画像を作成する。表示制御部45は、作成された構成部品の画像を表示情報としてモニタ52に出力する。それにより、駆動部43により駆動される構成部品の実際の動作と、モニタ52に表示される構成部品の動作とを一致させることが可能となる。その結果、分析作業中に蓋部材(図示省略)を開けずに、また、蓋部材に透明部分を設けずに、分析作業中の構成部品の動作を確認することが可能となる。
【0048】
例えば、試料ラック30、試薬容器130及び反応ライン330がそれぞれ所定角度回転することで、所定の試料容器21、試薬容器101及び反応容器301が所定位置に送られたことを確認可能となる。また、試料プローブ23及び第1試薬プローブ103が下降することで、所定の試料及び試薬が吸引又は吐出されたことを確認可能となる。
【0049】
(動作)
次に、シミュレータ44等の動作について図5を参照にして説明する。図5は、駆動制御部42及びシミュレータ44が制御信号を受け、シミュレータ44が制御信号に基づき構成部品の画像をモニタに表示するフロー図である。なお、前述したように、制御信号には、動作すべき構成部品のポート番号、及び構成部品の動作量が含まれる。
【0050】
先ず、上位のアプリケーションから構成部品の動作量を指示する(ステップS101)。次に、例えば、構成部品Aの動作量を変換する(ステップS102)。ここでは、例えば、モータの動作量に変換する(パラメータ:M1)。次に、構成部品Aのハードウェアポート番号をIO定義テーブルより得る(ステップS103)。次に、当該ポートへ命令を出力する(ステップS104)。それにより、実際の駆動制御部42のポートADRである入出力ポート421に動作M1を出力する(ステップS105)。
【0051】
次に、シミュレータ44の動作モニタ用のポートADRである制御信号処理部46に動作M1を出力する(ステップS106)。続いて、次の処理を行う(ステップS107)。
【0052】
シミュレータ44の制御信号処理部46は、ポートADRから対応する構成部品のCAD表示番号をテーブルにより取得する(ステップS108)。このテーブルはCAD情報記憶部49に記憶されている。次に、制御信号処理部46は、対応する構成部品CAD表示の動作モードを取得する(ステップS109)。動作モードは、動作の種類のテーブルとして動作情報記憶部51に記憶される。動作の種類のテーブルを図5に示す。
【0053】
次に、画像作成部47は、動作M1、動作させた場合の構成部品の移動量を計算する(ステップS110)。構成部品の移動量の計算には動作係数が用いられる。動作係数のテーブルは、動作情報記憶部51に記憶される。動作係数のテーブルを図5に示す。ステッピングモータの移動量の計算には、移動量/パルスが用いられる。また、試料プローブ23の吸引及び吐出の動作には、その画像の色変化が用いられる。第1試薬プローブ103の吸引及び吐出の動作には、その画像の色変化が用いられる。画像の色変化により、試料や試薬の動作を確認することが可能となる。さらに、電動モータの動作には回転角度が用いられる。画像作成部47は、動作情報記憶部51に記憶された動作内容の情報に基づき、移動量を計算する。次に、画像作成部47は、対応する構成部品CAD図面の位置をその移動量に応じて変化させる(ステップS111)。
【0054】
次に、表示制御部45は、変化させた構成部品の画像をモニタ52に表示させる(ステップS112)。
【0055】
画像上で、例えば、試料ラック30、試薬容器130、及び反応ライン330を変化させることにより、試料容器21、試薬容器101及び反応容器301の搬送を確認することが可能となる。
【0056】
また、画像上の試料容器21、試薬容器101、反応容器301を例えばカーソルにより指定することにより、試料容器21内の試料の情報、反応容器301内の試薬の情報、反応容器301内の試料及び試薬の各情報をモニタ52に表示可能となる。それにより、例えば、種類の異なる試薬容器101を試薬容器130に載置した誤作業を、分析作業中に蓋部材を閉じた状態であっても、確認することができる。
【0057】
さらに、試料プローブ23の画像の色を変化させることにより、試料の吸引及び吐出の動作を確認することが可能となる。さらに、第1試薬プローブ103の画像の色を変化させることにより、試薬の吸引及び吐出の動作を確認することが可能となる。
【0058】
なお、前記実施形態では、構成部品の3次元形状及び位置に関するCADデータに基づき構成部品の画像を作成し、該画像をモニタ52に表示させた。これに限らず、シミュレータ44が、複数の試料容器21、複数の試薬容器101、及び複数の反応容器301の各容器の2次元又は3次元形状及び各容器の位置に関するデータを有し、その形状データ及び位置データに基づき、複数の試料容器21、複数の試薬容器101、複数の反応容器301をそれぞれ配置した画像をモニタ52に表示させるようにしても良い。
【0059】
さらに、シミュレータ44が、制御部40からの制御信号を受けて、制御信号を受けた時点に分注に係わっている試料容器21、試薬容器101及び反応容器301の画像をモニタ52に表示させるようにしても良い。それにより、分析作業中において、蓋部材を閉じたままで、試料及び試薬の分注に係わっている試料容器、試薬容器及び反応容器を容易に確認することが可能となる。
【0060】
さらに、実施形態では、構成部品の3次元形状及び位置に関するCADデータに基づき構成部品の画像を作成したが、CADデータに基づく画像に限らず、構成部品を模式化あるいは簡素化した画像データ、カメラなどで撮影した画像データを用いても良い。
【0061】
さらに、操作部、及び試料容器21内の試料内容についての情報、試薬容器101内の試薬内容についての情報を記憶する記憶部を有し、モニタ52に表示されている複数の試料容器21、複数の試薬容器101、複数の反応容器301の画像の1つを操作部により指定すると、シミュレータ44が、指定された試料容器21内の試料内容についての情報、試薬容器101内の試薬内容についての情報、反応容器301内の試料内容及び試薬内容についての情報を記憶部から読み出し、読み出した情報をモニタ52に表示させるようにしても良い。それにより、分析作業中に、蓋部材を閉じたままで、モニタ52上で、各容器内の試料又は試薬を容易に確認することが可能となる。
【図面の簡単な説明】
【0062】
【図1】この発明の一実施形態に係る自動分析装置の要部を示す斜視図である。
【図2】自動分析装置の機能ブロック図である。
【図3】制御信号と構成部品の動作とを対応させた図である。
【図4】構成部品の動作情報の説明図である。
【図5】駆動制御部及びシミュレータが制御信号を受け、シミュレータが制御信号に基づき構成部品の画像をモニタに表示するフロー図である。
【符号の説明】
【0063】
10 自動分析装置 20 試料庫 21 試料容器 22 試料アーム
23 試料プローブ 30 試料ラック 40 制御部 41 動作制御部
42 駆動制御部 43 駆動部 44 シミュレータ 45 表示制御部
46 制御信号処理部 47 画像作成部 48 制御信号記憶部
49 CAD情報記憶部 51 動作情報記憶部 52 モニタ
100 第1試薬庫 101 試薬容器 102 第1試薬アーム
103 第1試薬プローブ 110 試薬庫ケース 130 試薬容器
190 測定部 200 第2試薬庫 202 第2試薬アーム
203 第2試薬プローブ 300 反応庫 301 反応容器
330 反応ライン 421 入出力ポート 422 入出力回路
423 駆動回路
【特許請求の範囲】
【請求項1】
複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、
蓋部材と、
前記試料容器、前記試薬容器及び前記反応容器をそれぞれ搬送させ、前記試料容器内の前記試料と前記試薬容器内の前記試薬とを前記反応容器に分注するための少なくとも複数の構成部品であって、前記蓋部材により外部から覆われる複数の構成部品と、
前記複数の構成部品の前記搬送及び前記分注のための動作を制御する制御信号を出力する制御部と、
モニタと、
前記複数の構成部品の3次元形状及び位置に関する画像データを記憶する記憶部と、
前記記憶部から読み出した前記画像データに基づく前記複数の構成部品の画像を前記モニタに表示させるとともに、前記制御信号を受けて、前記モニタに表示させた画像上の前記複数の構成部品を変化させる表示制御部と、
を有する
ことを特徴とする自動分析装置。
【請求項2】
複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、
蓋部材と、
複数の前記試料容器を並べた状態で載置する試料ラックと、前記試料ラックを所定方向に移動させることにより、前記複数の試料容器を順番に第1吸引位置に搬送する第1駆動部とを有する試料庫と、
複数の前記試薬容器を並べた状態で載置する試薬容器と、前記試薬容器を所定方向に移動させることにより、前記複数の試薬容器を順番に第2吸引位置に搬送する第2駆動部とを有する試薬庫と、
前記複数の反応容器を並べた状態で載置する反応ラインと、前記反応ラインを所定方向に移動させることにより、前記複数の反応容器を順番に第1吐出位置及び第2吐出位置に搬送する第3駆動部とを有する反応庫と、
前記第1吸引位置と前記第1吐出位置との間を移動し、その先端部に試料プローブが設けられた試料アームと、
前記第2吸引位置と前記第2吐出位置との間を移動し、その先端部に試薬プローブが設けられた試薬アームと、
前記第1吸引位置に移動した前記試料プローブにより所定の前記試料容器から試料を吸引させた後に、前記第1吐出位置に移動した前記試料プローブにより所定の前記反応容器に試料を吐出させる試料吸排部と、
前記第2吸引位置に移動した前記試薬プローブにより所定の前記試薬容器から試薬を吸引させた後に、前記第2吐出位置に移動した前記試薬プローブにより所定の前記反応容器に試薬を吐出させる試薬吸排部と、
前記試料ラック、前記試料アーム、前記試料プローブ、前記試薬容器、前記試薬アーム、前記試薬プローブ、前記反応ラインを含み、前記蓋部材により外部から覆われる複数の構成部品の前記搬送、前記吸引及び前記吐出のための動作を制御する制御信号を出力する駆動制御部と、
モニタと、
前記複数の構成部品の3次元形状及び位置に関する画像データを記憶する記憶部と、
前記記憶部から読み出した前記画像データに基づく前記複数の構成部品の画像を前記モニタに表示させるとともに、前記制御信号を受けて、前記モニタに表示させた画像上の前記複数の構成部品を変化させる表示制御部と、
を有する
ことを特徴とする自動分析装置。
【請求項3】
複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、
前記試料容器、前記試薬容器及び前記反応容器をそれぞれ搬送させ、前記試料容器内の前記試料と前記試薬容器内の前記試薬とを前記反応容器に分注するための少なくとも複数の構成部品であって、
前記複数の構成部品の前記搬送及び前記分注のための動作を制御する制御信号を出力する制御部と、
モニタと、
前記複数の試料容器、前記複数の試薬容器、及び前記複数の反応容器のそれぞれを配置した画像データを記憶する記憶部と、
前記記憶部から読み出した前記画像データを前記モニタに表示させるとともに、前記制御信号を受けて、該制御信号を受けた時点で前記分注に係わっている前記試料容器、前記試薬容器及び前記反応容器の画像を識別して前記モニタに表示させる表示制御部と、
を有する
ことを特徴とする自動分析装置。
【請求項4】
予め前記複数の試料容器内の試料内容を示す情報、及び前記複数の試薬容器内の試薬内容を示す情報を記憶する記憶部と、操作部とを有し、
前記表示制御部は、前記モニタに表示されている前記複数の試料容器の中から1つを前記操作部により指定したとき、該指定された試料容器についての前記情報を前記記憶部から読み出して、前記モニタに表示させることを特徴とする請求項3に記載の自動分析装置。
【請求項5】
前記画像データは、CADデータであることを特徴とする請求項1から請求項3のいずれか1項に記載の自動分析装置。
【請求項1】
複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、
蓋部材と、
前記試料容器、前記試薬容器及び前記反応容器をそれぞれ搬送させ、前記試料容器内の前記試料と前記試薬容器内の前記試薬とを前記反応容器に分注するための少なくとも複数の構成部品であって、前記蓋部材により外部から覆われる複数の構成部品と、
前記複数の構成部品の前記搬送及び前記分注のための動作を制御する制御信号を出力する制御部と、
モニタと、
前記複数の構成部品の3次元形状及び位置に関する画像データを記憶する記憶部と、
前記記憶部から読み出した前記画像データに基づく前記複数の構成部品の画像を前記モニタに表示させるとともに、前記制御信号を受けて、前記モニタに表示させた画像上の前記複数の構成部品を変化させる表示制御部と、
を有する
ことを特徴とする自動分析装置。
【請求項2】
複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、
蓋部材と、
複数の前記試料容器を並べた状態で載置する試料ラックと、前記試料ラックを所定方向に移動させることにより、前記複数の試料容器を順番に第1吸引位置に搬送する第1駆動部とを有する試料庫と、
複数の前記試薬容器を並べた状態で載置する試薬容器と、前記試薬容器を所定方向に移動させることにより、前記複数の試薬容器を順番に第2吸引位置に搬送する第2駆動部とを有する試薬庫と、
前記複数の反応容器を並べた状態で載置する反応ラインと、前記反応ラインを所定方向に移動させることにより、前記複数の反応容器を順番に第1吐出位置及び第2吐出位置に搬送する第3駆動部とを有する反応庫と、
前記第1吸引位置と前記第1吐出位置との間を移動し、その先端部に試料プローブが設けられた試料アームと、
前記第2吸引位置と前記第2吐出位置との間を移動し、その先端部に試薬プローブが設けられた試薬アームと、
前記第1吸引位置に移動した前記試料プローブにより所定の前記試料容器から試料を吸引させた後に、前記第1吐出位置に移動した前記試料プローブにより所定の前記反応容器に試料を吐出させる試料吸排部と、
前記第2吸引位置に移動した前記試薬プローブにより所定の前記試薬容器から試薬を吸引させた後に、前記第2吐出位置に移動した前記試薬プローブにより所定の前記反応容器に試薬を吐出させる試薬吸排部と、
前記試料ラック、前記試料アーム、前記試料プローブ、前記試薬容器、前記試薬アーム、前記試薬プローブ、前記反応ラインを含み、前記蓋部材により外部から覆われる複数の構成部品の前記搬送、前記吸引及び前記吐出のための動作を制御する制御信号を出力する駆動制御部と、
モニタと、
前記複数の構成部品の3次元形状及び位置に関する画像データを記憶する記憶部と、
前記記憶部から読み出した前記画像データに基づく前記複数の構成部品の画像を前記モニタに表示させるとともに、前記制御信号を受けて、前記モニタに表示させた画像上の前記複数の構成部品を変化させる表示制御部と、
を有する
ことを特徴とする自動分析装置。
【請求項3】
複数の試料容器に収容されている試料と、複数の試薬容器に収容されている試薬とを反応容器の中で反応させることにより、前記試料に含まれる特定成分の分析を行う自動分析装置において、
前記試料容器、前記試薬容器及び前記反応容器をそれぞれ搬送させ、前記試料容器内の前記試料と前記試薬容器内の前記試薬とを前記反応容器に分注するための少なくとも複数の構成部品であって、
前記複数の構成部品の前記搬送及び前記分注のための動作を制御する制御信号を出力する制御部と、
モニタと、
前記複数の試料容器、前記複数の試薬容器、及び前記複数の反応容器のそれぞれを配置した画像データを記憶する記憶部と、
前記記憶部から読み出した前記画像データを前記モニタに表示させるとともに、前記制御信号を受けて、該制御信号を受けた時点で前記分注に係わっている前記試料容器、前記試薬容器及び前記反応容器の画像を識別して前記モニタに表示させる表示制御部と、
を有する
ことを特徴とする自動分析装置。
【請求項4】
予め前記複数の試料容器内の試料内容を示す情報、及び前記複数の試薬容器内の試薬内容を示す情報を記憶する記憶部と、操作部とを有し、
前記表示制御部は、前記モニタに表示されている前記複数の試料容器の中から1つを前記操作部により指定したとき、該指定された試料容器についての前記情報を前記記憶部から読み出して、前記モニタに表示させることを特徴とする請求項3に記載の自動分析装置。
【請求項5】
前記画像データは、CADデータであることを特徴とする請求項1から請求項3のいずれか1項に記載の自動分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−122186(P2010−122186A)
【公開日】平成22年6月3日(2010.6.3)
【国際特許分類】
【出願番号】特願2008−298585(P2008−298585)
【出願日】平成20年11月21日(2008.11.21)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成22年6月3日(2010.6.3)
【国際特許分類】
【出願日】平成20年11月21日(2008.11.21)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]