
自動分析装置
【課題】血液,尿などの生体サンプルの定性・定量分析を行う自動分析装置において、空の反応容器に試料や試薬を吐出する際に液体の粘性に関わらず、正確に分注することができ、サンプルプローブ先端を反応容器の底に接触させないで分注できる液体分注機構を備えた自動分析装置を提供する。
【解決手段】反応容器分注時、反応容器底面とサンプルプローブ先端の隙間を一定に保ち、分注させながらサンプルプローブを上昇させることでサンプルプローブ側面へのサンプル付着をなくし分注精度向上を可能とした。
【解決手段】反応容器分注時、反応容器底面とサンプルプローブ先端の隙間を一定に保ち、分注させながらサンプルプローブを上昇させることでサンプルプローブ側面へのサンプル付着をなくし分注精度向上を可能とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、血液,尿等の生体試料の成分の分析を自動的に実行する自動分析装置に係り、特に、該試料容器や試薬容器から液体を採取して反応容器に分注する自動分析装置に関する。
【背景技術】
【0002】
血液,尿などの生体サンプルの定性・定量分析を行う自動分析装置は、測定再現性の高さ,高い分析処理速度により、検査センター,大病院を中心に普及が進んでいる。自動分析装置は、サンプル中の分析対象成分と反応し、反応液の色が変るような試薬を用いる方法(比色分析),対象成分と直接あるいは間接的に特異的に結合する物質に標識体を付加した試薬を用い、標識体をカウントする方法(免疫分析)に大分される。いずれの方法でもサンプルに所定量の試薬を混合して分析を行うが、近年、分析コストの低減要求に伴い、分析に使用する試薬の量を少なくできる分析装置が求められている。これに伴い、1回の分析に使用するサンプル量の低減が必要となる。現在の自動分析装置での1回の分析に使用するサンプル量は1桁マイクロリットルのオーダーである。これだけ少ない液体をサンプルが収容されたサンプル容器から、試薬と反応させるための反応容器に移送しなければならない。マイクロリットルオーダーの液体の移送では、液体の表面張力の制御が重要である。すなわち、注射針用のノズルの先端から、マイクロリットルオーダーの液体を吐出しようとしても、ノズル先端に液玉となって付着するだけで反応容器に落下しない。そこで、ノズルを反応容器に接触させることで、液体が反応容器底面に濡れ広がろうとする表面張力により、液体を反応容器に移し替えることが一般的である。
【0003】
上記従来の技術については例えば特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】日本特許第3247471号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし上記従来の技術には、以下の欠点がある。
【0006】
反応容器の底にサンプルプローブ先端を接触させて試料を分注する方法での欠点であるが、斜めにカットされたサンプルプローブ先端が反応容器の底に毎回接触されるため、サンプルプローブの先端がダメージを受ける可能性があり、プローブの定期的な交換が必要である。また、反応容器の底が傷つく可能性もあるため、反応容器についても定期的に交換する必要がある。特に最近は試料分注量が1μリットル以下と少ない量で分注精度を維持するためにサンプルプローブ先端径が細く尖がっており、反応容器の底やサンプルプローブ先端のダメージは受けやすくなっていると言える。
【0007】
また、反応容器底面にサンプルプローブを押し付けた状態(しなっている状態)でサンプル分注動作を行い、サンプル分注後、サンプルプローブが上昇すると、サンプルプローブ側面にサンプルの付着が存在する。またサンプルプローブが押し付けられた状態から上昇時に元の状態(しなりの無い状態)に戻る動作によりサンプルプローブの振動がサンプルプローブ側面,カット先端部についたサンプルを反応容器側面へ飛散らせる可能性がある。又はサンプルプローブ側面にサンプルを付着させたまま持ち帰りしてしまう可能性がある。
【0008】
また、反応容器底面に毎回サンプルプローブが接触することで、反応容器底面でのサンプルプローブ先端の滑りが発生し、反応容器底面に傷をつけ、且つ滑りが発生することで反応容器底面に対する分注位置の再現性が取れないことにより攪拌精度再現性に影響し分析結果に影響を及ぼす可能性がある。
【0009】
微量分注になるほど前記の影響が高くなり測定結果の信頼性に影響を及ぼすことが可能性が高くなる。
【0010】
本発明の目的は、サンプルプローブの先端や反応容器の底のダメージを受けずに微量でも分注精度が維持できる自動分析装置を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するための本発明の構成は以下の通りである。
【0012】
試験管等からサンプルを吸引する際に、圧力センサで圧力変化を測定し、サンプル粘性等の情報を得る。サンプルの粘性,分注量に応じ、分注させながらサンプルプローブ上昇速度を最適な動作で駆動をさせる。
【0013】
また、サンプル分注を行う反応容器ポジションに小型のカメラを配置し、各反応容器の反応容器底面とサンプルプローブの隙間寸法をカメラにて正確に測定を実施し分注時の反応容器底面からサンプルプローブ先端との距離を正確に制御する。
【0014】
反応容器への分注状態を観察することで、ノズル側面付着(持ち帰り)の有無モニタリング、且つ反応容器底面への確実な分注動作確認を実施する。
【発明の効果】
【0015】
本発明によれば、試料を反応容器に分注する際に、サンプルプローブ側面へのサンプル付着,反応容器へのサンプル飛散りを無くすことが可能となり、サンプルプローブ先端と反応容器の底を接触させないのでプローブや反応容器にダメージを与えない。
【0016】
また、サンプルプローブ先端と反応容器の底の隙間寸法を一定に確保することができ、サンプルの粘性等にとらわれることなく分注精度の向上および維持が可能となる。
【図面の簡単な説明】
【0017】
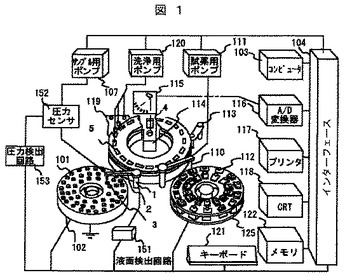
【図1】一般的な自動分析装置概略図。
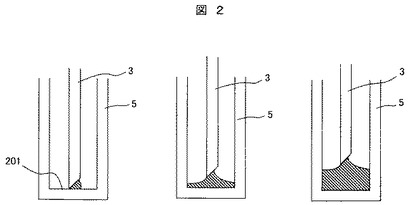
【図2】分注方法1。
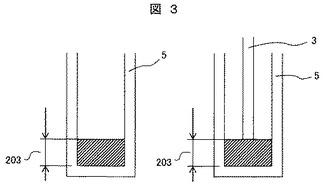
【図3】分注方法2。
【図4】CCDカメラを用いた配置図。
【図5】分割ブロック形状をした反応容器。
【図6】最小隙間測定1。
【図7】最小隙間測定2。
【図8】反応容器回転によるCCDカメラスキャン。
【図9】サンプルプローブ先端形状。
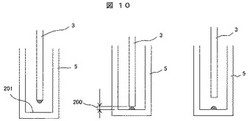
【図10】分注方法3。
【図11】分注方法4。
【図12】分注方法5。
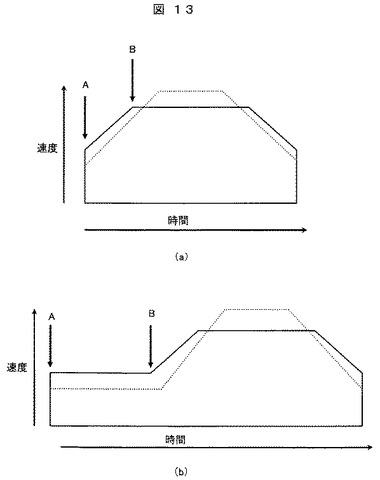
【図13】サンプリングノズル上昇速度と吐出終了の関係。
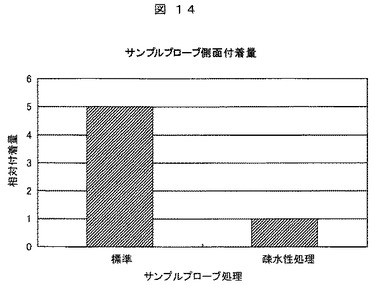
【図14】疎水性を持たせたサンプリングノズル側面のサンプル付着量。
【発明を実施するための形態】
【0018】
以下、図面を用いて本発明の実施例を説明する。
【0019】
図1に本発明が実施される一般的な自動分析装置の概略を示す。
【0020】
各部の機能は公知のものであるため、詳細についての記述は省略する。
【0021】
サンプリング機構1のサンプリングアーム2は上下すると共に回転し、サンプリングアーム2に取り付けられたサンプルプローブ3を用いて、左右に回転するサンプルディスク102に配置された試料容器101内の試料を吸引し、反応容器5へ分注するように構成されている。本図からもわかるように試料容器101のサンプルディスク102上への配置はサンプルディスク102上へ直接配置する場合や試験管(図示は無い)上に試料容器101を載せることも可能なユニバーサルな配置に対応可能な構造のものが一般的である。
【0022】
回転自在な試薬ディスク125上には分析対象となる複数の分析項目に対応する試薬ボトル112が配置されている。可動アームに取り付けられた試薬分注プローブ110は、試薬ボトル112から反応容器5へ所定量の試薬を分注する。
【0023】
サンプルプローブ3は、サンプル用シリンジポンプ107の動作に伴ってサンプルの吸引動作、及び分注動作を実行する。試薬分注プローブ110は、試薬用ポンプ111の動作に伴って試薬の吸引動作、及び分注動作を実行する。各試料のために分析すべき分析項目は、キーボード121、又はCRT118の画面のような入力装置から入力される。この自動分析装置における各ユニットの動作はコンピュータ103により制御される。
【0024】
サンプルディスク102の間欠回転に伴って試料容器101はサンプル吸引位置へ移送され、停止中の試料容器内にサンプルプローブ3が降下される。その下降動作に伴ってサンプルプローブ3の先端が試料の液面に接触すると液面検出回路151から検出信号が出力され、それに基づいてコンピュータ103がサンプリングアーム2の駆動部の下降動作を停止するよう制御する。次にサンプルプローブ3内に所定量の試料を吸引した後、サンプルプローブ3は上死点まで上昇する。サンプルプローブ3が試料を所定量吸引している間は、サンプルプローブ3とサンプル用ポンプ107流路間の吸引動作中の流路内圧力変動を圧力センサ152からの信号を用い圧力検出回路153で監視し、吸引中の圧力変動に異常を発見した場合は所定量吸引されていない可能性が高いため、当該分析データに対しアラームを付加する。
【0025】
次にサンプリングアーム2が水平方向に旋回し反応ディスク4上の反応容器5の位置でサンプルプローブ3を下降し反応容器5内へ保持していた試料を分注する。試料が入った反応容器5が試薬添加位置まで移動された時に、該当する分析項目に対応した試薬が試薬分注プローブ110から添加される。サンプル、及び試薬の分注に伴って試料容器101内の試料、及び試薬ボトル112内の試薬の液面が検出される。試料、及び試薬が加えられた反応容器内の混合物は、攪拌器113により攪拌される。混合物が収納された反応容器が光度計115に移送され、各混合物の発光値、或いは吸光度が測定手段としての光電子増倍管、或いは光度計により測定される。発光信号あるいは受光信号は、A/D変換器116を経由しインターフェース104を介してコンピュータ103に入り、分析項目の濃度が計算される。分析結果は、インターフェース104を介してプリンタ117に印字出力するか、又はCRT118に画面出力すると共に、メモリ122に格納される。測光が終了した反応容器5は、反応容器洗浄機構119の位置にて洗浄される。洗浄用ポンプ120は、反応容器へ洗浄水を供給すると共に、反応容器から廃液を排出する。図1の例では、サンプルディスク102に同心円状に3列の試料容器101がセットできるように3列の容器保持部が形成されており、サンプルプローブ3による試料吸引位置が各々の列に1個ずつ設定されている。
【0026】
以上が自動分析装置の一般的な動作である。
【0027】
次に図2から図14を用いて本特許の実施例を説明する。
【0028】
図2のようにサンプルプローブ3先端を反応容器底面201に接触させる。サンプル用ポンプ107で吐出する際はサンプルプローブ3でサンプルを吐出しながらサンプルプローブ3を上昇させる。
【0029】
実際は、サンプルプローブ3上部に取り付けられたバネにより、反応容器底面201に接触後、さらにサンプルプローブ3を反応容器底面201に押し付ける動作でサンプルプローブ3をバネクッションで反応容器底面201に押し付ける。サンプルプローブ3を上昇させる時にサンプルプローブ3はバネクッションしている寸法分は反応容器底面201から離れず反応容器底面201に接触したままであり、バネクッションが無くなり反応容器底面201から外れる時にサンプルプローブ3で吐出しながらサンプルプローブ3を上昇させながら分注を開始することでサンプルプローブ3外面にサンプル付着をつけない分注が可能となる。
【0030】
また、図3に示すように分注量に対する反応容器5の分注後サンプル高さ203は、反応容器の縦×横の寸法から容易に算出可能であり、分注する場合、サンプルプローブ3を隙間200まで下降させ、分注したサンプルが反応容器底面201に接触後、サンプルプローブ3を分注させながら分注後サンプル高さ203まで上昇させ、吐出したサンプルが、分注後サンプル高さ203になるのを待つことで、サンプルプローブ3先端のサンプル玉残りを低減しサンプルプローブ3外面に付着するサンプルを無くすことが可能となる。
【0031】
ここで、サンプルプローブ3と全反応容器5の寸法にはバラツキがあり、そのバラツキを補正する手段として以下の方法が考えられる。
【0032】
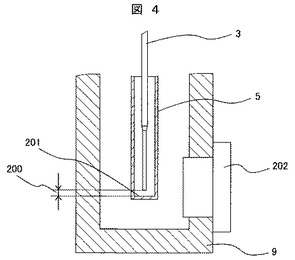
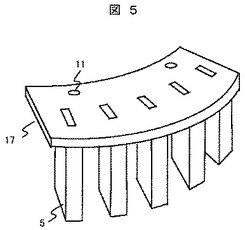
図4のようにサンプルプローブ3にて反応容器5に分注するポジションにCCDカメラ202を配置し全反応容器底面201とサンプルプローブ3先端との隙間200の高さを測定する。各反応容器の隙間200はバラツキがある。隙間200のバラツク原因として反応容器は樹脂製の成型品で製作されており、成型時の熱収縮変形が原因で僅かな反りが発生したり、また、反応容器形状は反応ディスク一周分を一体で樹脂成形するのは大変困難であるため、図5のように分割ブロック状の形状をした反応容器を用いる。複数ブロックで一周分を形成しネジ穴11を使って反応容器ブロック17を反応ディスク4にネジでしっかり固定することで反応容器が変形することも反応容器の隙間200のバラツク原因となっている。
【0033】
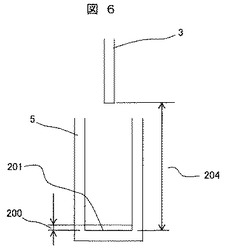
隙間200の測定方法は、図6のようにサンプリング機構1の上下動作を駆動しているパルスモータにて、一番目の反応容器底面201にサンプルプローブ3を接触させ、サンプルプローブ3が接触するまでの使用したパルス数からサンプルプローブ3から反応容器底面201の反応容器底からサンプルプローブ先端の高さ204を算出し、この動作を各々全ての反応容器底面201に対して実施することで、全ての反応容器5の隙間200を算出可能とする。
【0034】
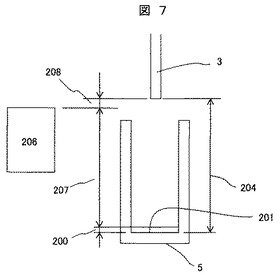
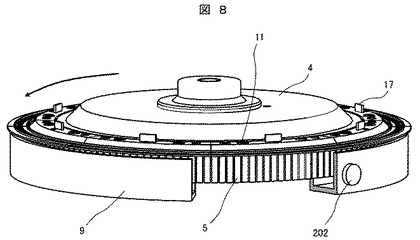
もしくは、図7のように基準面206を設ける。CCDカメラ202と基準面206の高さ位置は、サンプルプローブ3と反応容器5との取り付けには依存しない、つまり不変であるので、反応容器5を取り付けた反応ディスク4を図8のように回転させ、基準面206に対するセル底からの高さ207とサンプルプローブ先端からの高さ208をCCDカメラ202で読み取りサンプルプローブ3を隙間200で停止する必要移動量を算出する。
【0035】
もしくは、金属製の基準面206を設け、サンプルプローブ3を基準面206に接触させ、接触した位置から異常下降検知が入るまでの移動パルス量を記憶する。サンプル分注時、サンプルプローブ3が反応容器底面201に接触してから異常下降検知が入るまでのパルス数は前記で求めてあるので、サンプルプローブ3が反応容器底面201に接触し異常検知停止後、前記記憶したパルス数に隙間200分の必要パルス数を足し、サンプルプローブ3を上昇させ隙間200で停止させる。
【0036】
また、隙間200の測定方法は、図4のように各々の反応容器5に対しサンプルプローブ3をある一定量下降させ反応容器底面201との高さをCCDカメラ202で測定し、必要な隙間200を算出する。
【0037】
もしくはサンプルプローブ3をある一定量下降させ一番目の反応容器5の隙間200を測定し、残りの反応容器5の隙間200は反応容器5を取り付けた反応ディスク4を図8のように回転させると同時にCCDカメラ202で反応容器底面201の高さを測定し、最初に測定した反応容器底面201との差分により各反応容器の隙間200を算出しても同等の結果が得られ、反応容器底面201にサンプルプローブ3を非接触で隙間200を測定できるので反応容器底面201に傷をつけない。
【0038】
尚、隙間200の測定は、サンプルプローブ3及び反応容器5の交換時、または装置イニシャライズ動作時に実施する。
【0039】
次にサンプル吸引動作について説明する。
【0040】
サンプルプローブ3にてサンプルディスク102に架設された試験管等内のサンプルをサンプル用ポンプ107で必要量を吸引する。サンプルは粘性等が個々によって異なる。
【0041】
圧力センサ152でこの吸引動作にかかる圧力をサンプル吸引毎に測定し、サンプル用ポンプ107で反応容器5に分注する際、吸引動作にかかる圧力の違いから、血清,尿,標準液、等を区別し、分注する際にサンプルプローブ3とサンプル用ポンプ107の分注動作を変化させる。つまりサンプルプローブ3の分注位置高さとサンプル用ポンプ107の分注動作をサンプルの粘性により変化させ分注精度の向上を図る。
【0042】
ここでサンプルプローブ3先端の形状は従来の斜め加工より平ら加工にするほうが望ましい。例えばサンプル吸引時、先端が斜め形状であるとサンプルの吸引動作の流速にムラが生じるが、平ら形状であると、吸引時のサンプルの流速を一定に吸引できる。また、サンプルにサンプルプローブ3は液面検知後、一定量サンプルに突っ込んで停止する。
【0043】
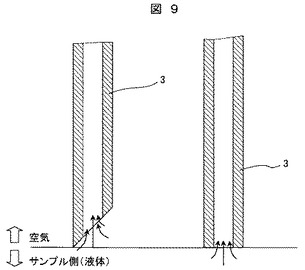
サンプル吸引後、再度液面検知でサンプルプローブ3がサンプルの中にあるか確認する。空吸いを防止するためである。ノズル先端が斜めであると図9のようにサンプル吸引後に空気を吸引していても斜め先端がサンプルに接触しており液面検知をしていることになり、サンプルでなく空気を吸引していることに気が付かない。よってサンプルプローブ3先端が平らであることは誤吸引することを防止できるという利点もある。
【0044】
サンプル分注後の洗浄動作においても、断面積を低減することで洗浄水のサンプルプローブ3先端の付着を低減できる。
【0045】
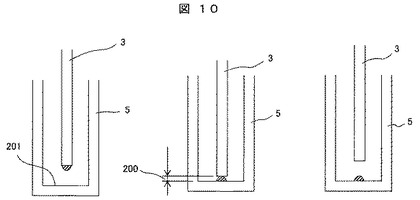
また、サンプルプローブ3先端の形状が平らであるとサンプルとの接触面積を低減でき、図10に示すように1μリットル以下の微量分注において、親水性をもたせた反応容器底面201に分注する際、予めサンプルプローブ3先端にサンプルを吐出させておいて、その後反応容器底面201にサンプルを接触させ親水性をもたせた反応容器底面201に分注することが可能になる。
【0046】
また、図11に示すように反応容器底面201にサンプルプローブ3を下降させた後、分注動作を開始する。サンプルプローブ3先端に作られるサンプル液玉205が親水性をもたせた反応容器底面201に接触させ、図14のような疎水性を持たせたサンプルプローブ3で分注することでサンプルプローブ3が上昇しながら分注する際、サンプルプローブ3でのサンプル持ち帰りを無くすことが可能になる。
【0047】
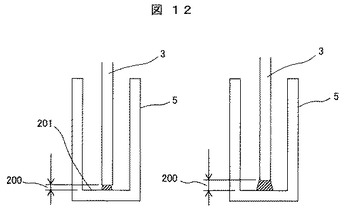
また、図12に示すように必要分注量は予め設定するのでサンプルプローブ3先端に作られるサンプル液玉205の大きさを予測できる。よって、分注量に応じサンプルプローブ3の下降量を変化させ隙間200を分注量によって変えて分注する。
【0048】
また、サンプルプローブ3先端の形状が平らであると、反応容器底面201に傷をつけないので、反応容器5の長寿命化が図れ、且つ測定時の泡,汚れ低減を図ることができる。
【0049】
図11に分注動作による実施例を示す。サンプルを反応容器底面201に分注する動作は、サンプルプローブ3が隙間200になるまで下降し、サンプル用ポンプ107で反応容器5に分注する。この分注の様子をCCDカメラ202で観察し、サンプルが反応容器底面201に接触且つ一定の大きさになったところでサンプルプローブ3を上昇させながら分注動作を実施する。予め圧力センサ152で測定したサンプルの粘性に合わせサンプルプローブ3の上昇動作、サンプル用ポンプ107の吸引動作を変えることでサンプルプローブ3側面にサンプルの付着を存在させない。つまり分注精度の向上を図ることができる。
【0050】
図13に分注時のサンプルプローブ3上昇の駆動パラメータ図を示す。分注精度向上を図るためには、サンプルプローブ3加速上昇終了のB点でサンプル用ポンプ107の分注が終了することは望ましいことではない。サンプルプローブ3の加速度域から一定速度域へ(図13(a))、また一定速度域から加速度域(図13(b))の速度変化が起こりサンプルプローブ3の振動が発生し、反応容器5側面にサンプルが飛散ったり、サンプルプローブ3側面へのサンプル付着となる要因となるためである。分注精度向上を図るためには、分注終了はA〜Bの区間で終了させることが必要である。
【0051】
また、図13の点線のようにサンプルの粘性によりサンプルプローブ3上昇速度を変化させ、サンプルプローブ3を分注しながら上昇させることで、粘性の影響を受けない高精度の分注が可能となる。
【0052】
一般にはサンプル用ポンプ107駆動モータとサンプルプローブ200の駆動モータは各々別々のコントローラを使用しているが、サンプル用ポンプ107の分注動作とサンプルプローブ200の上昇動作を、同一のコントローラから動作指示を出すことで、各駆動モータ間の動作指示からの時間差を埋めることができ、分注精度向上を図れる。
【0053】
本実施例では、サンプルの分注にのみついて説明したが、試薬の分注においても反応容器5に一番最初に試薬を分注する場合に限っては、サンプルプローブ3側面に試薬をつけない技術から同様なことが可能(試薬分注量が微量のとき効果大)であり、分注対象の液体の種別や用途などによって適用範囲が制限されるものではない。
【符号の説明】
【0054】
1 サンプリング機構
2 サンプリングアーム
3 サンプルプローブ
4 反応ディスク
5 反応容器
6 機構ベース
7 駆動機構
8 駆動シャフト
9 反応槽
10 反応槽水
11 ネジ穴
12 中心ステンレス管
13 絶縁接着剤
14 シールドステンレス管
15 段差
16 反応容器の縁
17 反応容器ブロック
18,101 試料容器
102 サンプルディスク
103 コンピュータ
104 インターフェース
107 サンプル用ポンプ
110 試薬分注プローブ
111 試薬用ポンプ
112 試薬ボトル
113 攪拌機構
114 光源ランプ
115 光度計
116 A/D変換器
117 プリンタ
118 CRT
119 反応容器洗浄機構
120 洗浄用ポンプ
121 キーボード
122 メモリ
125 試薬ディスク
151 液面検出回路
152 圧力センサ
153 圧力検出回路
200 隙間
201 反応容器底面
202 CCDカメラ
203 分注後サンプル高さ
204 反応容器底からサンプルプローブ先端の高さ
205 液玉
206 基準面
207 セル底からの高さ
208 サンプルプローブ先端からの高さ
【技術分野】
【0001】
本発明は、血液,尿等の生体試料の成分の分析を自動的に実行する自動分析装置に係り、特に、該試料容器や試薬容器から液体を採取して反応容器に分注する自動分析装置に関する。
【背景技術】
【0002】
血液,尿などの生体サンプルの定性・定量分析を行う自動分析装置は、測定再現性の高さ,高い分析処理速度により、検査センター,大病院を中心に普及が進んでいる。自動分析装置は、サンプル中の分析対象成分と反応し、反応液の色が変るような試薬を用いる方法(比色分析),対象成分と直接あるいは間接的に特異的に結合する物質に標識体を付加した試薬を用い、標識体をカウントする方法(免疫分析)に大分される。いずれの方法でもサンプルに所定量の試薬を混合して分析を行うが、近年、分析コストの低減要求に伴い、分析に使用する試薬の量を少なくできる分析装置が求められている。これに伴い、1回の分析に使用するサンプル量の低減が必要となる。現在の自動分析装置での1回の分析に使用するサンプル量は1桁マイクロリットルのオーダーである。これだけ少ない液体をサンプルが収容されたサンプル容器から、試薬と反応させるための反応容器に移送しなければならない。マイクロリットルオーダーの液体の移送では、液体の表面張力の制御が重要である。すなわち、注射針用のノズルの先端から、マイクロリットルオーダーの液体を吐出しようとしても、ノズル先端に液玉となって付着するだけで反応容器に落下しない。そこで、ノズルを反応容器に接触させることで、液体が反応容器底面に濡れ広がろうとする表面張力により、液体を反応容器に移し替えることが一般的である。
【0003】
上記従来の技術については例えば特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】日本特許第3247471号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし上記従来の技術には、以下の欠点がある。
【0006】
反応容器の底にサンプルプローブ先端を接触させて試料を分注する方法での欠点であるが、斜めにカットされたサンプルプローブ先端が反応容器の底に毎回接触されるため、サンプルプローブの先端がダメージを受ける可能性があり、プローブの定期的な交換が必要である。また、反応容器の底が傷つく可能性もあるため、反応容器についても定期的に交換する必要がある。特に最近は試料分注量が1μリットル以下と少ない量で分注精度を維持するためにサンプルプローブ先端径が細く尖がっており、反応容器の底やサンプルプローブ先端のダメージは受けやすくなっていると言える。
【0007】
また、反応容器底面にサンプルプローブを押し付けた状態(しなっている状態)でサンプル分注動作を行い、サンプル分注後、サンプルプローブが上昇すると、サンプルプローブ側面にサンプルの付着が存在する。またサンプルプローブが押し付けられた状態から上昇時に元の状態(しなりの無い状態)に戻る動作によりサンプルプローブの振動がサンプルプローブ側面,カット先端部についたサンプルを反応容器側面へ飛散らせる可能性がある。又はサンプルプローブ側面にサンプルを付着させたまま持ち帰りしてしまう可能性がある。
【0008】
また、反応容器底面に毎回サンプルプローブが接触することで、反応容器底面でのサンプルプローブ先端の滑りが発生し、反応容器底面に傷をつけ、且つ滑りが発生することで反応容器底面に対する分注位置の再現性が取れないことにより攪拌精度再現性に影響し分析結果に影響を及ぼす可能性がある。
【0009】
微量分注になるほど前記の影響が高くなり測定結果の信頼性に影響を及ぼすことが可能性が高くなる。
【0010】
本発明の目的は、サンプルプローブの先端や反応容器の底のダメージを受けずに微量でも分注精度が維持できる自動分析装置を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するための本発明の構成は以下の通りである。
【0012】
試験管等からサンプルを吸引する際に、圧力センサで圧力変化を測定し、サンプル粘性等の情報を得る。サンプルの粘性,分注量に応じ、分注させながらサンプルプローブ上昇速度を最適な動作で駆動をさせる。
【0013】
また、サンプル分注を行う反応容器ポジションに小型のカメラを配置し、各反応容器の反応容器底面とサンプルプローブの隙間寸法をカメラにて正確に測定を実施し分注時の反応容器底面からサンプルプローブ先端との距離を正確に制御する。
【0014】
反応容器への分注状態を観察することで、ノズル側面付着(持ち帰り)の有無モニタリング、且つ反応容器底面への確実な分注動作確認を実施する。
【発明の効果】
【0015】
本発明によれば、試料を反応容器に分注する際に、サンプルプローブ側面へのサンプル付着,反応容器へのサンプル飛散りを無くすことが可能となり、サンプルプローブ先端と反応容器の底を接触させないのでプローブや反応容器にダメージを与えない。
【0016】
また、サンプルプローブ先端と反応容器の底の隙間寸法を一定に確保することができ、サンプルの粘性等にとらわれることなく分注精度の向上および維持が可能となる。
【図面の簡単な説明】
【0017】
【図1】一般的な自動分析装置概略図。
【図2】分注方法1。
【図3】分注方法2。
【図4】CCDカメラを用いた配置図。
【図5】分割ブロック形状をした反応容器。
【図6】最小隙間測定1。
【図7】最小隙間測定2。
【図8】反応容器回転によるCCDカメラスキャン。
【図9】サンプルプローブ先端形状。
【図10】分注方法3。
【図11】分注方法4。
【図12】分注方法5。
【図13】サンプリングノズル上昇速度と吐出終了の関係。
【図14】疎水性を持たせたサンプリングノズル側面のサンプル付着量。
【発明を実施するための形態】
【0018】
以下、図面を用いて本発明の実施例を説明する。
【0019】
図1に本発明が実施される一般的な自動分析装置の概略を示す。
【0020】
各部の機能は公知のものであるため、詳細についての記述は省略する。
【0021】
サンプリング機構1のサンプリングアーム2は上下すると共に回転し、サンプリングアーム2に取り付けられたサンプルプローブ3を用いて、左右に回転するサンプルディスク102に配置された試料容器101内の試料を吸引し、反応容器5へ分注するように構成されている。本図からもわかるように試料容器101のサンプルディスク102上への配置はサンプルディスク102上へ直接配置する場合や試験管(図示は無い)上に試料容器101を載せることも可能なユニバーサルな配置に対応可能な構造のものが一般的である。
【0022】
回転自在な試薬ディスク125上には分析対象となる複数の分析項目に対応する試薬ボトル112が配置されている。可動アームに取り付けられた試薬分注プローブ110は、試薬ボトル112から反応容器5へ所定量の試薬を分注する。
【0023】
サンプルプローブ3は、サンプル用シリンジポンプ107の動作に伴ってサンプルの吸引動作、及び分注動作を実行する。試薬分注プローブ110は、試薬用ポンプ111の動作に伴って試薬の吸引動作、及び分注動作を実行する。各試料のために分析すべき分析項目は、キーボード121、又はCRT118の画面のような入力装置から入力される。この自動分析装置における各ユニットの動作はコンピュータ103により制御される。
【0024】
サンプルディスク102の間欠回転に伴って試料容器101はサンプル吸引位置へ移送され、停止中の試料容器内にサンプルプローブ3が降下される。その下降動作に伴ってサンプルプローブ3の先端が試料の液面に接触すると液面検出回路151から検出信号が出力され、それに基づいてコンピュータ103がサンプリングアーム2の駆動部の下降動作を停止するよう制御する。次にサンプルプローブ3内に所定量の試料を吸引した後、サンプルプローブ3は上死点まで上昇する。サンプルプローブ3が試料を所定量吸引している間は、サンプルプローブ3とサンプル用ポンプ107流路間の吸引動作中の流路内圧力変動を圧力センサ152からの信号を用い圧力検出回路153で監視し、吸引中の圧力変動に異常を発見した場合は所定量吸引されていない可能性が高いため、当該分析データに対しアラームを付加する。
【0025】
次にサンプリングアーム2が水平方向に旋回し反応ディスク4上の反応容器5の位置でサンプルプローブ3を下降し反応容器5内へ保持していた試料を分注する。試料が入った反応容器5が試薬添加位置まで移動された時に、該当する分析項目に対応した試薬が試薬分注プローブ110から添加される。サンプル、及び試薬の分注に伴って試料容器101内の試料、及び試薬ボトル112内の試薬の液面が検出される。試料、及び試薬が加えられた反応容器内の混合物は、攪拌器113により攪拌される。混合物が収納された反応容器が光度計115に移送され、各混合物の発光値、或いは吸光度が測定手段としての光電子増倍管、或いは光度計により測定される。発光信号あるいは受光信号は、A/D変換器116を経由しインターフェース104を介してコンピュータ103に入り、分析項目の濃度が計算される。分析結果は、インターフェース104を介してプリンタ117に印字出力するか、又はCRT118に画面出力すると共に、メモリ122に格納される。測光が終了した反応容器5は、反応容器洗浄機構119の位置にて洗浄される。洗浄用ポンプ120は、反応容器へ洗浄水を供給すると共に、反応容器から廃液を排出する。図1の例では、サンプルディスク102に同心円状に3列の試料容器101がセットできるように3列の容器保持部が形成されており、サンプルプローブ3による試料吸引位置が各々の列に1個ずつ設定されている。
【0026】
以上が自動分析装置の一般的な動作である。
【0027】
次に図2から図14を用いて本特許の実施例を説明する。
【0028】
図2のようにサンプルプローブ3先端を反応容器底面201に接触させる。サンプル用ポンプ107で吐出する際はサンプルプローブ3でサンプルを吐出しながらサンプルプローブ3を上昇させる。
【0029】
実際は、サンプルプローブ3上部に取り付けられたバネにより、反応容器底面201に接触後、さらにサンプルプローブ3を反応容器底面201に押し付ける動作でサンプルプローブ3をバネクッションで反応容器底面201に押し付ける。サンプルプローブ3を上昇させる時にサンプルプローブ3はバネクッションしている寸法分は反応容器底面201から離れず反応容器底面201に接触したままであり、バネクッションが無くなり反応容器底面201から外れる時にサンプルプローブ3で吐出しながらサンプルプローブ3を上昇させながら分注を開始することでサンプルプローブ3外面にサンプル付着をつけない分注が可能となる。
【0030】
また、図3に示すように分注量に対する反応容器5の分注後サンプル高さ203は、反応容器の縦×横の寸法から容易に算出可能であり、分注する場合、サンプルプローブ3を隙間200まで下降させ、分注したサンプルが反応容器底面201に接触後、サンプルプローブ3を分注させながら分注後サンプル高さ203まで上昇させ、吐出したサンプルが、分注後サンプル高さ203になるのを待つことで、サンプルプローブ3先端のサンプル玉残りを低減しサンプルプローブ3外面に付着するサンプルを無くすことが可能となる。
【0031】
ここで、サンプルプローブ3と全反応容器5の寸法にはバラツキがあり、そのバラツキを補正する手段として以下の方法が考えられる。
【0032】
図4のようにサンプルプローブ3にて反応容器5に分注するポジションにCCDカメラ202を配置し全反応容器底面201とサンプルプローブ3先端との隙間200の高さを測定する。各反応容器の隙間200はバラツキがある。隙間200のバラツク原因として反応容器は樹脂製の成型品で製作されており、成型時の熱収縮変形が原因で僅かな反りが発生したり、また、反応容器形状は反応ディスク一周分を一体で樹脂成形するのは大変困難であるため、図5のように分割ブロック状の形状をした反応容器を用いる。複数ブロックで一周分を形成しネジ穴11を使って反応容器ブロック17を反応ディスク4にネジでしっかり固定することで反応容器が変形することも反応容器の隙間200のバラツク原因となっている。
【0033】
隙間200の測定方法は、図6のようにサンプリング機構1の上下動作を駆動しているパルスモータにて、一番目の反応容器底面201にサンプルプローブ3を接触させ、サンプルプローブ3が接触するまでの使用したパルス数からサンプルプローブ3から反応容器底面201の反応容器底からサンプルプローブ先端の高さ204を算出し、この動作を各々全ての反応容器底面201に対して実施することで、全ての反応容器5の隙間200を算出可能とする。
【0034】
もしくは、図7のように基準面206を設ける。CCDカメラ202と基準面206の高さ位置は、サンプルプローブ3と反応容器5との取り付けには依存しない、つまり不変であるので、反応容器5を取り付けた反応ディスク4を図8のように回転させ、基準面206に対するセル底からの高さ207とサンプルプローブ先端からの高さ208をCCDカメラ202で読み取りサンプルプローブ3を隙間200で停止する必要移動量を算出する。
【0035】
もしくは、金属製の基準面206を設け、サンプルプローブ3を基準面206に接触させ、接触した位置から異常下降検知が入るまでの移動パルス量を記憶する。サンプル分注時、サンプルプローブ3が反応容器底面201に接触してから異常下降検知が入るまでのパルス数は前記で求めてあるので、サンプルプローブ3が反応容器底面201に接触し異常検知停止後、前記記憶したパルス数に隙間200分の必要パルス数を足し、サンプルプローブ3を上昇させ隙間200で停止させる。
【0036】
また、隙間200の測定方法は、図4のように各々の反応容器5に対しサンプルプローブ3をある一定量下降させ反応容器底面201との高さをCCDカメラ202で測定し、必要な隙間200を算出する。
【0037】
もしくはサンプルプローブ3をある一定量下降させ一番目の反応容器5の隙間200を測定し、残りの反応容器5の隙間200は反応容器5を取り付けた反応ディスク4を図8のように回転させると同時にCCDカメラ202で反応容器底面201の高さを測定し、最初に測定した反応容器底面201との差分により各反応容器の隙間200を算出しても同等の結果が得られ、反応容器底面201にサンプルプローブ3を非接触で隙間200を測定できるので反応容器底面201に傷をつけない。
【0038】
尚、隙間200の測定は、サンプルプローブ3及び反応容器5の交換時、または装置イニシャライズ動作時に実施する。
【0039】
次にサンプル吸引動作について説明する。
【0040】
サンプルプローブ3にてサンプルディスク102に架設された試験管等内のサンプルをサンプル用ポンプ107で必要量を吸引する。サンプルは粘性等が個々によって異なる。
【0041】
圧力センサ152でこの吸引動作にかかる圧力をサンプル吸引毎に測定し、サンプル用ポンプ107で反応容器5に分注する際、吸引動作にかかる圧力の違いから、血清,尿,標準液、等を区別し、分注する際にサンプルプローブ3とサンプル用ポンプ107の分注動作を変化させる。つまりサンプルプローブ3の分注位置高さとサンプル用ポンプ107の分注動作をサンプルの粘性により変化させ分注精度の向上を図る。
【0042】
ここでサンプルプローブ3先端の形状は従来の斜め加工より平ら加工にするほうが望ましい。例えばサンプル吸引時、先端が斜め形状であるとサンプルの吸引動作の流速にムラが生じるが、平ら形状であると、吸引時のサンプルの流速を一定に吸引できる。また、サンプルにサンプルプローブ3は液面検知後、一定量サンプルに突っ込んで停止する。
【0043】
サンプル吸引後、再度液面検知でサンプルプローブ3がサンプルの中にあるか確認する。空吸いを防止するためである。ノズル先端が斜めであると図9のようにサンプル吸引後に空気を吸引していても斜め先端がサンプルに接触しており液面検知をしていることになり、サンプルでなく空気を吸引していることに気が付かない。よってサンプルプローブ3先端が平らであることは誤吸引することを防止できるという利点もある。
【0044】
サンプル分注後の洗浄動作においても、断面積を低減することで洗浄水のサンプルプローブ3先端の付着を低減できる。
【0045】
また、サンプルプローブ3先端の形状が平らであるとサンプルとの接触面積を低減でき、図10に示すように1μリットル以下の微量分注において、親水性をもたせた反応容器底面201に分注する際、予めサンプルプローブ3先端にサンプルを吐出させておいて、その後反応容器底面201にサンプルを接触させ親水性をもたせた反応容器底面201に分注することが可能になる。
【0046】
また、図11に示すように反応容器底面201にサンプルプローブ3を下降させた後、分注動作を開始する。サンプルプローブ3先端に作られるサンプル液玉205が親水性をもたせた反応容器底面201に接触させ、図14のような疎水性を持たせたサンプルプローブ3で分注することでサンプルプローブ3が上昇しながら分注する際、サンプルプローブ3でのサンプル持ち帰りを無くすことが可能になる。
【0047】
また、図12に示すように必要分注量は予め設定するのでサンプルプローブ3先端に作られるサンプル液玉205の大きさを予測できる。よって、分注量に応じサンプルプローブ3の下降量を変化させ隙間200を分注量によって変えて分注する。
【0048】
また、サンプルプローブ3先端の形状が平らであると、反応容器底面201に傷をつけないので、反応容器5の長寿命化が図れ、且つ測定時の泡,汚れ低減を図ることができる。
【0049】
図11に分注動作による実施例を示す。サンプルを反応容器底面201に分注する動作は、サンプルプローブ3が隙間200になるまで下降し、サンプル用ポンプ107で反応容器5に分注する。この分注の様子をCCDカメラ202で観察し、サンプルが反応容器底面201に接触且つ一定の大きさになったところでサンプルプローブ3を上昇させながら分注動作を実施する。予め圧力センサ152で測定したサンプルの粘性に合わせサンプルプローブ3の上昇動作、サンプル用ポンプ107の吸引動作を変えることでサンプルプローブ3側面にサンプルの付着を存在させない。つまり分注精度の向上を図ることができる。
【0050】
図13に分注時のサンプルプローブ3上昇の駆動パラメータ図を示す。分注精度向上を図るためには、サンプルプローブ3加速上昇終了のB点でサンプル用ポンプ107の分注が終了することは望ましいことではない。サンプルプローブ3の加速度域から一定速度域へ(図13(a))、また一定速度域から加速度域(図13(b))の速度変化が起こりサンプルプローブ3の振動が発生し、反応容器5側面にサンプルが飛散ったり、サンプルプローブ3側面へのサンプル付着となる要因となるためである。分注精度向上を図るためには、分注終了はA〜Bの区間で終了させることが必要である。
【0051】
また、図13の点線のようにサンプルの粘性によりサンプルプローブ3上昇速度を変化させ、サンプルプローブ3を分注しながら上昇させることで、粘性の影響を受けない高精度の分注が可能となる。
【0052】
一般にはサンプル用ポンプ107駆動モータとサンプルプローブ200の駆動モータは各々別々のコントローラを使用しているが、サンプル用ポンプ107の分注動作とサンプルプローブ200の上昇動作を、同一のコントローラから動作指示を出すことで、各駆動モータ間の動作指示からの時間差を埋めることができ、分注精度向上を図れる。
【0053】
本実施例では、サンプルの分注にのみついて説明したが、試薬の分注においても反応容器5に一番最初に試薬を分注する場合に限っては、サンプルプローブ3側面に試薬をつけない技術から同様なことが可能(試薬分注量が微量のとき効果大)であり、分注対象の液体の種別や用途などによって適用範囲が制限されるものではない。
【符号の説明】
【0054】
1 サンプリング機構
2 サンプリングアーム
3 サンプルプローブ
4 反応ディスク
5 反応容器
6 機構ベース
7 駆動機構
8 駆動シャフト
9 反応槽
10 反応槽水
11 ネジ穴
12 中心ステンレス管
13 絶縁接着剤
14 シールドステンレス管
15 段差
16 反応容器の縁
17 反応容器ブロック
18,101 試料容器
102 サンプルディスク
103 コンピュータ
104 インターフェース
107 サンプル用ポンプ
110 試薬分注プローブ
111 試薬用ポンプ
112 試薬ボトル
113 攪拌機構
114 光源ランプ
115 光度計
116 A/D変換器
117 プリンタ
118 CRT
119 反応容器洗浄機構
120 洗浄用ポンプ
121 キーボード
122 メモリ
125 試薬ディスク
151 液面検出回路
152 圧力センサ
153 圧力検出回路
200 隙間
201 反応容器底面
202 CCDカメラ
203 分注後サンプル高さ
204 反応容器底からサンプルプローブ先端の高さ
205 液玉
206 基準面
207 セル底からの高さ
208 サンプルプローブ先端からの高さ
【特許請求の範囲】
【請求項1】
試料を反応容器に分注するサンプル分注プローブを備えた自動分析装置において、
サンプル分注の際の前記サンプル分注プローブ降下時に前記サンプル分注プローブのノズル先端に液滴を形成するよう前記サンプル分注プローブ内の圧力を制御する制御機構を備え、かつ該制御機構は、試料の粘性の情報に基づき圧力を制御することを特徴とする自動分析装置。
【請求項2】
請求項1記載の自動分析装置において、
前記試料の粘性の情報は、試料を前記サンプル分注プローブに吸引する際の、前記ノズル内圧力に基づいて算出されることを特徴とする自動分析装置。
【請求項3】
請求項1記載の自動分析装置において、
前記ノズルの先端はほぼ水平であることを特徴とする自動分析装置。
【請求項1】
試料を反応容器に分注するサンプル分注プローブを備えた自動分析装置において、
サンプル分注の際の前記サンプル分注プローブ降下時に前記サンプル分注プローブのノズル先端に液滴を形成するよう前記サンプル分注プローブ内の圧力を制御する制御機構を備え、かつ該制御機構は、試料の粘性の情報に基づき圧力を制御することを特徴とする自動分析装置。
【請求項2】
請求項1記載の自動分析装置において、
前記試料の粘性の情報は、試料を前記サンプル分注プローブに吸引する際の、前記ノズル内圧力に基づいて算出されることを特徴とする自動分析装置。
【請求項3】
請求項1記載の自動分析装置において、
前記ノズルの先端はほぼ水平であることを特徴とする自動分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−175417(P2010−175417A)
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願番号】特願2009−18949(P2009−18949)
【出願日】平成21年1月30日(2009.1.30)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願日】平成21年1月30日(2009.1.30)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]