
自動分析装置

【課題】カバーの開きを検知して装置を停止させても分析再開後は停止前の状態へ速やかに復帰することのできる自動分析装置を提供する。
【解決手段】 自動分析装置100は、プローブの洗浄位置、吸引位置、及び被検試料又は試薬の吐出位置にこの順で移動を繰り返し、反応管に被検試料又は試薬を分注するアーム6をステージ110上に有する。この自動分析装置100は、ステージ110を覆うカバーとカバーの開閉を検知するセンサ113bを有し、センサ113bがカバーの開きを検知すると、該アームを洗浄位置に移動させる。
【解決手段】 自動分析装置100は、プローブの洗浄位置、吸引位置、及び被検試料又は試薬の吐出位置にこの順で移動を繰り返し、反応管に被検試料又は試薬を分注するアーム6をステージ110上に有する。この自動分析装置100は、ステージ110を覆うカバーとカバーの開閉を検知するセンサ113bを有し、センサ113bがカバーの開きを検知すると、該アームを洗浄位置に移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、被検試料と試薬とを分注して撹拌し、混合液を測定する自動分析装置に関する。
【背景技術】
【0002】
自動分析装置は、被検試料と試薬とを分注して混合液を測定する装置である。反応管に血液や尿等の被検試料と試薬とを分注してこれらを反応させた後、反応によって生じる色調の変化を光測定することにより検体中の被測定物質または酵素の濃度や活性を測定する。
【0003】
この自動分析装置では、筐体の上面をステージに設定し、ステージ上に、被検試料を収納した試料容器、試薬を収納した試薬容器、被検試料及び試薬が分注される反応管、試料容器を搬送する搬送路、試薬容器を搬送する搬送路、反応管を搬送する搬送路、試料容器から被検試料を吸引して反応管に吐出するために回転するアーム、試薬容器から試薬を吸引して反応管に吐出するために回転するアーム、反応管内を撹拌する撹拌ユニット、混合液を測光する測光ユニット、各アームに支持されているプローブや反応管を洗浄する各洗浄ユニットが配置され、それぞれが駆動している。
【0004】
そのため、これら駆動ユニットを保護するため、被検試料や試薬の温度を保つため、及び操作者に対する安全のため、この自動分析装置には、ステージを覆うカバーが開閉可能に取り付けられている。
【0005】
このような自動分析装置では、被検試料や試薬を交換する際、このカバーを開いてステージを開放した状態とし、操作者がステージ上に手を伸ばして試料容器や試薬容器を交換する。そのため、操作者の手とアームとが干渉してしまうことで、自動分析装置に損傷を与えてしまうおそれや、操作者に危害を加えてしまうおそれがある。
【0006】
そこで、従来は、カバーの開きを検知するセンサを取り付けておき、カバーが開かれると、装置の測定動作を停止するようにしていた(例えば、「特許文献1」参照。)。具体的には、試料容器の搬送路、試薬容器の搬送路、反応管の搬送路、各アームの回転を止める。移動する部材がなくなることで、少なくとも操作者に対する安全を確保し、自動分析装置の損傷を防ぐことができる。
【0007】
しかし、このような自動分析装置では、アーム等を直ちに停止させると、アームに支持されているプローブに被検試料や試薬が付着したままの可能性もあるため、再開後は、まず洗浄から始めなくてはならず、停止前の状態への復帰に遅延が生じていた。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第3808895号
【発明の概要】
【発明が解決しようとする課題】
【0009】
この発明は、上述のような問題点に鑑みてなされたものであり、その目的とするところは、カバーの開きを検知して装置を停止させても分析再開後は停止前の状態へ速やかに復帰することのできる自動分析装置を提供するものである。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明に係る自動分析装置の態様は、ステージ上で被検試料と試薬とを反応管に分注して混合液を測定し、その測定結果を表示手段に出力する自動分析装置であって、プローブを有し、前記ステージ上で、該プローブの洗浄位置、前記被検試料又は前記試薬の吸引位置、及び前記被検試料又は前記試薬の吐出位置にこの順で移動を繰り返す分注駆動をすることにより、前記反応管に前記被検試料又は前記試薬を分注するアームと、前記ステージの少なくとも一部を覆い、開閉が可能なカバーと、前記カバーの開閉を検知するセンサと、前記アームの分注駆動を制御するとともに、前記センサにより前記カバーの開きが検知されると、前記アームの前記分注駆動を停止させて前記洗浄位置へ移動させる制御手段と、を備えること、を特徴とする。
【0011】
前記制御手段は、前記センサにより前記カバーの開きが検知されると、前記アームを前記分注の制御による移動よりも低速で前記洗浄位置へ移動させるようにしてもよい。
【0012】
前記アームは、少なくとも2以上が配されるとともに、その一部のアームは前記カバーの開閉口の近傍に配され、前記制御手段は、前記カバーの開きが検知されると、前記一部のアームの前記分注駆動を停止させて前記洗浄位置へ移動させるとともに、他のアームの前記分注駆動の制御を継続するようにしてもよい。
【0013】
前記カバーは、ステージの少なくとも一部をそれぞれ覆う開閉が可能な複数の蓋部であり、前記センサは、前記各蓋部の開閉をそれぞれ検知し、前記アームは、少なくとも2以上が配され、前記制御手段は、前記各蓋部とその蓋部が覆う位置の近傍に配された前記各アームとを予め対応付けするとともに、前記蓋部の何れかの開きが検知されると、その開きが検知された前記蓋部に対応する前記アームの前記分注駆動を停止させて前記洗浄位置へ移動させるようにしてもよい。
【0014】
前記センサが前記カバーの開きを検知すると、前記カバーの開きを報知する報知手段を更に備えるようにしてもよい。
【0015】
前記報知手段は、ブザーを出力するスピーカであるようにしてもよい。
【0016】
前記表示手段は、前記センサが前記カバーの開きを検知したときに前記分注の途中であった前記被検試料に対する前記測定結果を出力しないようにしてもよい。
【0017】
前記制御手段は、前記センサが前記カバーの閉じを検知すると、前記洗浄位置へ移動させていた前記アームに対する前記分注駆動の制御を再開するようにしてもよい。
【0018】
前記制御手段は、前記被検試料に対するオーダー内容を搬送順に記録したスケジュールデータを作成する作成手段と、当該スケジュールデータから参照するオーダー内容を特定して、そのオーダー内容に従って前記分注駆動を制御する駆動制御手段と、を有し、前記作成手段は、前記カバーの開きが検知されると、前記特定したオーダー内容以下を前記スケジュールデータから削除するとともに、前記カバーの閉じが検知されると、新たに搬送されてきた前記被検試料に対するオーダー内容を削除部分から記録し直すことで前記スケジュールデータを再作成し、前記駆動制御手段は、前記カバーの閉じが検知されると、その再作成されたスケジュールデータに従って前記分注駆動を制御するようにしてもよい。
【発明の効果】
【0019】
本発明によれば、カバーを開いた操作者がステージ内に手を伸ばしてもアームは洗浄位置に待避しているため、この操作者に危害を与えるおそれを低減することができる。また、アームを洗浄位置に移動させているため、自動分析装置の再開時には、このアームを直ちに吸引及び吐出の工程に移すことができ、迅速に分析工程に復帰させることができる。
【図面の簡単な説明】
【0020】
【図1】自動分析装置のステージ上の構成を示す。
【図2】自動分析装置の外観を正面から示す。
【図3】自動分析装置の外観を側面から示す。
【図4】カバーの開閉を検知するセンサを示す。
【図5】自動分析装置の制御部の構成を示す。
【図6】スケジュールデータを示す。
【図7】オーダー情報を示す。
【図8】状況データを示す。
【図9A】吸引位置に移動しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9B】被検試料に下降しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9C】被検試料を吸引しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9D】被検試料から上昇しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9E】吐出位置に移動しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9F】反応管に下降しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9G】被検試料を吐出しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9H】反応管から上昇しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図10】スケジュールデータの作成を示す模式図である。
【図11】第1の蓋部に係るカバーの開きを検知したときの自動分析装置の動作を示すフローチャートである。
【図12】第1の蓋部に係るカバーの閉じを検知したときの自動分析装置の動作を示すフローチャートである。
【図13】第2の蓋部に係るカバーの開きを検知したときの自動分析装置の動作を示すフローチャートである。
【図14】第2の蓋部に係るカバーの閉じを検知したときの自動分析装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明に係る自動分析装置の好適な実施形態について、図面を参照しながら具体的に説明する。
【0022】
図1に示す自動分析装置100は、被検試料と試薬とを分注してその混合液の反応を分析することにより、被検試料に含まれる化学成分を分析する装置である。反応管31に血液や尿等の被検試料と試薬とを移してこれらを反応させた後、反応によって生じる色調の変化を光測定することにより検体中の被測定成分または酵素の濃度や活性を測定する。
【0023】
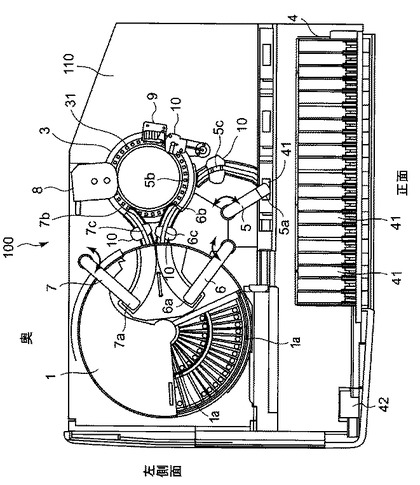
この自動分析装置100は、筐体の上面にステージ110を有し、このステージ110上に反応ディスク3、ディスクサンプラ4、試料分注アーム5、試薬庫1、第1試薬分注アーム6、第2試薬分注アーム7、撹拌ユニット8、測光ユニット9、及び洗浄ユニット10を配する。
【0024】
反応ディスク3は、反応管31を搬送する円周の搬送路であり、ステージ110の中心付近に配置される。この反応ディスク3は、反応管31を周方向に一列に並べて1サイクル毎に所定角度回転する。所定角度は、例えば、1周−1セル分である。即ち、反応ディスク3は、1サイクル毎の回転の結果、反応管31を1セル分移動させる。
【0025】
ディスクサンプラ4は、被検試料を収容した試料容器41を搬送する搬送路であり、ステージ110の正面の辺に沿って配置され、反応ディスク3の近傍に至る。このディスクサンプラ4は、試料容器41を一列に並べて1サイクル毎に試料容器41を1本分移動させる。
【0026】
ディスクサンプラ4の搬送路の途中には、バーコードを読み取るCCD等の読取り器42が設置されている。試料容器41には、その試料容器41内に収容されている被検試料を示す情報としてバーコードが貼着されている。読取り器42は、その前を通過した試料容器41に貼着されたバーコードから被検試料を示す情報を読み取る。被検試料を示す情報は、例えば被検試料の提供元である患者のIDである。
【0027】
試料分注アーム5は、ディスクサンプラ4上の試料容器41から被検試料を吸引し、反応ディスク3上の反応管31に吐出する。この試料分注アーム5は、反応ディスク3とディスクサンプラ4との間に立設する移動子であり、ステージ110の正面近傍に配置される。つまり、正面からステージ110上に手を突っ込むと試料分注アーム5と手が干渉しやすい。
【0028】
試料分注アーム5は、支柱とその支柱上部から水平方向に延びた保持部を有する逆L字形状を有し、保持部先端には、図示しないプローブを下方に垂れ下げて支持している。試料分注アーム5の支柱は軸回転可能に保持され、また2重筒構造を有して伸縮自在となっており、駆動装置12a(図5参照)の駆動に従動して支柱を中心に回転可動領域で回転し、駆動装置12aの駆動に従動して伸縮する。
【0029】
試料分注アーム5の回転可動領域の両端は、それぞれディスクサンプラ4上の一カ所、反応ディスク3上の一カ所に位置する。このディスクサンプラ4上の一カ所を被検試料の吸引位置5aとし、試料分注アーム5は、駆動装置12aの駆動に従動して吸引位置5aに位置する試料容器41上にプローブを位置させて下降し、試料容器41内にプローブを差し込む。また、反応ディスク3上の一カ所を被検試料の吐出位置5bとし、試料分注アーム5は、駆動装置12aの駆動に従動して吐出位置5bに位置する反応管31上にプローブを位置させて下降し、反応管31内にプローブを差し込む。
【0030】
回転可動領域の途中には、洗浄ユニット10が配されている。試料分注アーム5は、駆動装置12aの駆動に従動して洗浄ユニット10の洗浄位置5cにプローブを位置させて、被検試料が付着したプローブを洗浄する。
【0031】
プローブは、所謂ストローであり、図示しないポンプからかけられた負圧によって被検試料を試料容器41から吸引し、正圧によって被検試料を反応管31に吐出する。
【0032】
試薬庫1は、円筒形状を有し、ステージ110の正面に向かって左側面側に配置される。この試薬庫1には、試薬ラック1b(図5参照)が軸回転可能に収容されている。試薬ラック1bには、第1試薬を収容した試薬容器1a及び第2試薬を収容した試薬容器1aが収納される。第1試薬を収容した試薬容器1aは、試薬庫1の最外部に周方向に沿って並べられる。第2試薬を収容した試薬容器1aは、第1試薬を収容した試薬容器1aの並びよりも内周部に周方向に沿って並べられる。この試薬庫1は、第1試薬及び第2試薬の温度を調整する恒温槽となっており、上面はスライドにより開口する蓋部により覆われている。
【0033】
試薬庫1の内壁には、図示しない読取り器が配置されており、また第1試薬と第2試薬の試薬容器1aには読取り器に対向するようにバーコード等で示される試薬情報が貼着されている。試薬ラック1bを一回転させて、読取り器でバーコードを読み取ることで、試薬容器1a内の試薬の種類とその試薬容器1aの載置位置が特定される。
【0034】
第1試薬分注アーム6は、試薬庫1内の最外部に並ぶ試料容器41から第1試薬を吸引し、反応ディスク3上の反応管31に吐出する。第2試薬分注アーム7は、試薬庫1内の内周部に並ぶ試料容器41から第2試薬を吸引し、反応ディスク3上の反応管31に吐出する。
【0035】
これら第1試薬分注アーム6及び第2試薬分注アーム7も逆L字形状を有し、プローブを下方に垂れ下げて支持している。また、第1試薬分注アーム6及び第2試薬分注アーム7もそれぞれの駆動装置12b,12c(図5参照)に従動して、軸回転可能及び伸縮自在となっている。
【0036】
この第1試薬分注アーム6と第2試薬分注アーム7は、それぞれ反応ディスク3と試薬庫1との間に立設するように、ステージ110の左側面近傍に配置される。特に第1試薬分注アーム6は、試薬庫1を覆う蓋部の開口近傍に配置される。つまり、試薬庫1がある左側面側からステージ110上に手を突っ込むと第1試薬分注アーム6と手が干渉しやすい。
【0037】
また、これら第1試薬分注アーム6及び第2試薬分注アーム7の回転可動領域の両端も、それぞれ試薬庫1上の吸引位置6a,7a、反応ディスク3上の吐出位置6b,7bとなり、図示しないポンプによって第1試薬及び第2試薬をそれぞれ吸引及び吐出する。さらに、回転可動領域の途中には、洗浄ユニット10が配され、第1試薬分注アーム6及び第2試薬分注アーム7は、駆動装置12b,12cの駆動に従動して洗浄ユニット10の洗浄位置6c,7cにプローブを位置させて、第1試薬又は第2試薬が付着したプローブを洗浄させる。
【0038】
撹拌ユニット8は、反応ディスク3上に位置し、1サイクル毎に、撹拌位置に停止した反応管31内における被検試料+第1試薬や被検試料+第1試薬+第2試薬などの混合液を撹拌する。
【0039】
測光ユニット9は、反応ディスク3上に位置し、混合液を収容した反応管31を測光位置から測定する。測光ユニット9は、反応管31を挟んで配置される光源と受光部を有し、例えば、混合液の吸光度を測光した後、その測定結果データを出力する。
【0040】
洗浄ユニット10は、反応ディスク3上、試料分注アーム5、第1試薬分注アーム6、及び第2試薬分注アーム7の洗浄位置5c,6c,7cに配置され、反応管31と各プローブを洗浄及び乾燥する。
【0041】
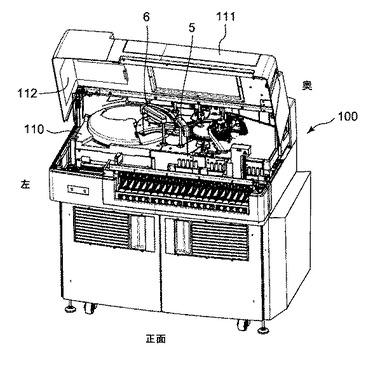
この自動分析装置100では、図2及び図3に示すように、運転時の安全及び被検試料や試薬や混合液の汚染防止の観点からステージ110を覆うカバーを有している。このカバーは、例えば第1の蓋部111及び第2の蓋部112等の1以上の蓋部で構成される。
【0042】
図2に示すように、第1の蓋部111は、ステージ110の全体を覆うカバーであり、ステージ110の奥側の端辺でヒンジ等により筐体と開閉可能に接続される。この第1の蓋部111は、ステージ110の正面側が開閉口となる。第1の蓋部111は、自動分析装置100のセッティングの際の他、被検試料を収容した試料容器41の載置及び取り外しの際に開閉される。ステージ110の正面近傍に位置する試料分注アーム5は、この第1の蓋部111の開閉口の近傍に位置する。
【0043】
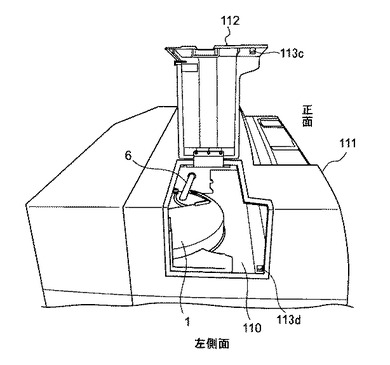
図2及び図3に示すように、第1の蓋部111の左側は、天井壁と側壁の一部が切り欠かれており、第2の蓋部112は、この切り欠き部分に第1の蓋部111と分割されて設けられている。この切り欠き部分は、試薬庫1を覆う蓋部の開口の最寄りに位置する。即ち、この第2の蓋部112は、第1試薬及び第2試薬の交換の際に主に開閉される。この第2の蓋部112を設けることによりステージ110全体を覆う第1の蓋部111を開ける必要がなくなる。試薬庫1を覆う蓋部の開口近傍に位置する第1試薬分注アーム6は、この第2の蓋部112の開閉口の近傍に位置することとなる。
【0044】
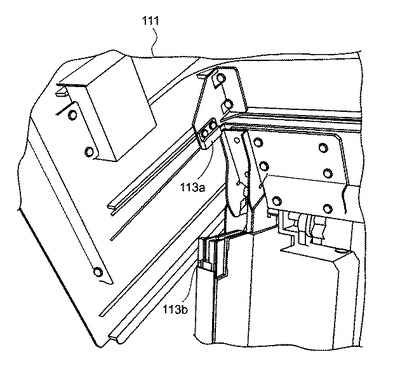
これら第1の蓋部111及び第2の蓋部112には、カバーの開閉を検知すべく、それぞれセンサが設けられている。第1の蓋部111には、この第1の蓋部111の開閉を検知する磁気センサ113bとこれと対になった磁性体113aが設けられている。第2の蓋部112には、この第2の蓋部112の開閉を検知する磁気センサ113dとこれと対になった磁性体113cが設けられている。
【0045】
図4で第1の蓋部111の開閉を検知するセンサの詳細を例示する。例えば、第1の蓋部111の裏面及びこの第1の蓋部111が閉じられたときのステージ110上の対向位置には、それぞれ突出片が立設されている。これら突出片は、第1の蓋部111が閉じられたときに先端が近接してすれ違うように位置及び高さが調節されている。一方の突出片の先端には磁性体113aが取り付けられ、他方の突出片の先端には、磁気を検出する磁気センサ113bが取り付けられている。この磁気センサ113bは、第1の蓋部111が閉じられたときに磁性体113aの磁気を検知し、第1の蓋部111が開けられたときに磁気の消失を検知する。
【0046】
第2の蓋部112の開閉を検知する磁気センサ113dと磁性体113cも、第2の蓋部112が閉じられるとこれらが近接して磁気が検知されるように、第2の蓋部112側とステージ110とに分かれて設けられており、磁気センサ113dは、第2の蓋部112が閉じられたときに磁性体113cの磁気を検知し、第2の蓋部112が開けられたときに磁気の消失を検知する。
【0047】
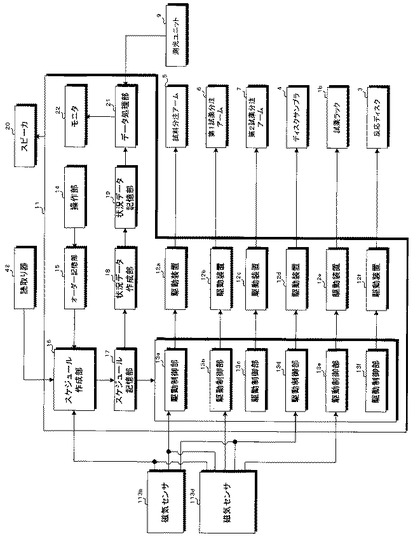
図5は、このような自動分析装置100を制御する制御部11の構成を示すブロック図である。図5に示すように、制御部11は、各ユニットを駆動させる各駆動装置12a,12b,12c,12d,12e,12f・・・とその駆動制御部13a,13b,13c,13d,13e,13f・・・・、操作部14、オーダー記憶部15、スケジュール作成部16、スケジュール記憶部17、状況データ作成部18、状況データ記憶部19、スピーカ20、データ処理部21、及びモニタ22を備える。
【0048】
この制御部11は、主に自動分析装置100の各ユニットの駆動制御、カバーが開いたときの移動子の待避制御、及びカバーが閉じたときの再開制御を行う。
【0049】
各駆動装置12a,12b,12c,12d,12e,12f・・・・は、モータやギア、またはこれに加えてポンプや発振器等を含み各ユニットを従動させる。例えば、ディスクサンプラ4、試薬ラック1b、反応ディスク3を従動させる各駆動装置12d,12e,12f・・・・は、これらを回転させる。試料分注アーム5、第1試薬分注アーム6、及び第2試薬分注アーム7の各駆動装置12a,12b,12cは、これらを吸引位置5a,6a,7a、吐出位置5b,6b,7b、及び洗浄位置5c,6c,7cに移動させ、プローブを下降又は上昇させるとともに、負圧及び正圧をかけて被検試料や試薬を吸引吐出させる。
【0050】
駆動制御部13a,13b,13c,13d,13e,13f・・・は、これら各駆動装置12a,12b,12c,12d,12e,12f・・・に1サイクル毎に予め定まったタイミングに予め定まった時間だけ制御信号を出力して正転や反転等の駆動をさせることで、従動する反応ディスク3、ディスクサンプラ4、試薬ラック1b、試料分注アーム5、第1試薬分注アーム6、及び第2試薬分注アーム7を所望位置に移動させる。
【0051】
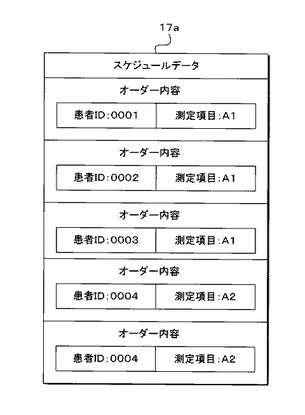
この駆動制御部13a,13b,13c,13d,13e,13f・・・による各ユニットの制御は、スケジュール記憶部17に記憶されているスケジュールデータ17aに従う。このスケジュールデータ17aは、オーダー記憶部15に記憶されているオーダー情報15aに基づき作成される。図6は、スケジュールデータ17aを示す図である。また、図7は、オーダー情報15aを示す図である。
【0052】
スケジュールデータ17aは、ディスクサンプラ4で搬送されてくる被検試料の順にそのオーダー内容を並べたデータである。スケジュール作成部16には、試料容器41が読取り器42の前を通過することで読み取られた被検試料を示す情報が入力される。スケジュール作成部16は、入力された被検試料を示す情報を含むオーダー情報15aをオーダー記憶部15から読み出し、被検試料を示す情報とそのオーダー情報15aに含まれる測定項目をオーダー内容としてスケジュールデータ17aに並べて記録する。
【0053】
オーダー情報15aには、被検試料の提供元である患者ID等の被検試料を示す情報と測定項目が記憶されており、キーボードやマウス等の操作部14を用いて予め入力され、オーダー記憶部15に記憶される。
【0054】
ディスクサンプラ4の駆動制御部13dは、ディスクサンプラ4を1サイクル毎に1容器分駆動させている。試料分注アーム5の駆動制御部13aは、試料容器41が搬送されてくると、スケジュールデータ17aを参照して、その試料容器41の搬送順番に一致する順番に並ぶオーダー内容を特定する。さらに、この駆動制御部13aは、特定したオーダー内容から測定項目を読み出し、その測定項目に合致した被検試料の分注量を特定する。
【0055】
そして、この駆動制御部13aは、試料分注アーム5を分注駆動させる。即ち、試料分注アーム5に、洗浄位置5cから吸引位置5aへの移動、試料容器41内へのプローブの下降、特定した分注量の吸引、試料容器41外へのプローブの上昇、吐出位置5bへの移動、吐出位置5bにある反応管31へのプローブの下降、吸引した被検試料の吐出、反応管31外へのプローブの上昇、及び洗浄位置5cへの移動をこの順で行わせる。
【0056】
反応ディスク3の駆動制御部13fは、反応ディスク3を1サイクル毎に1周−1セル分回転させている。第1試薬分注アーム6の駆動制御部13bは、被検試料が分注された反応管31が搬送されてくると、スケジュールデータ17aを参照して、その反応管31の搬送順番に一致する順番に並ぶオーダー内容を特定する。さらに、この駆動制御部13bは、特定したオーダー内容から測定項目を読み出し、その測定項目に合致した第1試薬とその分注量を特定する。
【0057】
そして、この駆動制御部13bは、第1試薬分注アーム6を分注駆動させる。即ち、第1試薬分注アーム6に、洗浄位置6cから吸引位置6aへの移動、第1試薬の試薬容器1a内へのプローブの下降、特定した分注量の吸引、試薬容器1a外へのプローブの上昇、吐出位置6bへの移動、吐出位置6bにある反応管31へのプローブの下降、吸引した被検試料の吐出、反応管31外へのプローブの上昇、及び洗浄位置への移動をこの順で行わせる。
【0058】
同時に、試薬ラック1bの駆動制御部13eは、測定項目に合致した第1試薬が収納された試薬容器1aを第1試薬分注アーム6の吸引位置7aに位置させるように、試薬ラック1bを回転させる。
【0059】
第2試薬分注アーム7の駆動制御部13cは、被検試料が分注された反応管31が搬送されてくると、スケジュールデータ17aを参照して、その反応管31の搬送順番に一致する順番に並ぶオーダー内容を特定する。さらに、この駆動制御部13cは、特定したオーダー内容から測定項目を読み出し、その測定項目に合致した第2試薬とその分注量を特定する。
【0060】
そして、この駆動制御部13cは、第2試薬分注アーム7を分注駆動させる。即ち、第2試薬分注アーム7に、洗浄位置7cから吸引位置7aへの移動、第2試薬の試薬容器1a内へのプローブの下降、特定した分注量の吸引、試薬容器1a外へのプローブの上昇、吐出位置7bへの移動、吐出位置7bにある反応管31へのプローブの下降、吸引した被検試料の吐出、反応管31外へのプローブの上昇、及び洗浄位置7cへの移動をこの順で行わせる。
【0061】
同時に、試薬ラック1bの駆動制御部13eは、測定項目に合致した第2試薬が収納された試薬容器1aを第2試薬分注アーム7の吸引位置7aに位置させるように、試薬ラック1bを回転させる。
【0062】
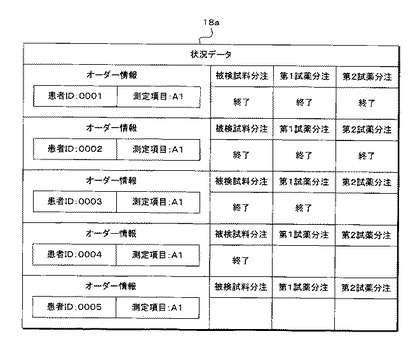
状況データ作成部18は、被検試料や第1試薬や第2試薬の分注がそれぞれ終了すると、その終了を反映した状況データを更新する。図8は、状況データを示す図である。状況データ18aは、現在の分注状況を示すようにサイクル毎に更新される。この状況データには、スケジュールデータ17aに記録されたオーダー内容が示す被検試料の分注、第1試薬の分注、第2試薬の分注の終了を示す情報が記録される。例えば、終了を示す情報は、フラグであり、被検試料の分注、第1試薬の分注、第2試薬の分注の終了を示すフラグをオーダー内容毎に状況データに立てる。
【0063】
データ処理部21は、測光ユニット9から出力された測定結果データを演算処理して検量線データや分析データを生成し、備え付けのモニタ22やプリンタに出力させる。出力させる測定結果データ等は、状況データ作成部18で全ての分注の終了を示すフラグが立てられたオーダーに対する。
【0064】
ここで、第1の蓋部111の開閉口近傍に位置する試料分注アーム5の駆動制御部13aには、第1の蓋部111の開閉を検知する磁気センサ113bからの信号が入力される。また、第2の蓋部112の開閉口近傍に位置する第1試薬分注アーム6の駆動制御部13b及び試料分注アーム5の駆動制御部13aには、第2の蓋部112の開閉を検知する磁気センサ113dからの信号が入力される。
【0065】
即ち、開閉される蓋部の種類とその開閉が駆動に影響するアームとが対応付けられている。その対応付けは、蓋部とアームとの位置関係による。第2の蓋部112の開閉の検知が試料分注アーム5の駆動制御部13aにも入力されるのは、被検試料を分注しても第1試薬が分注されなければ分析が完遂できないからであり、即ち下流の分注制限がその上流の分注にも影響を与えるためである。
【0066】
試料分注アーム5の駆動制御部13aは、第1の蓋部111の開きを示す信号が入力されると、試料分注アーム5を洗浄位置5cに待避させる。第1試薬分注アーム6の駆動制御部13bは、第2の蓋部112の開きを示す信号が入力されると、第1試薬分注アーム6を洗浄位置6cに待避させる。また、第2の蓋部112の開きを示す信号が入力されると、試料分注アーム5の駆動制御部13aは、試料分注アーム5を洗浄位置5cに待避させる。
【0067】
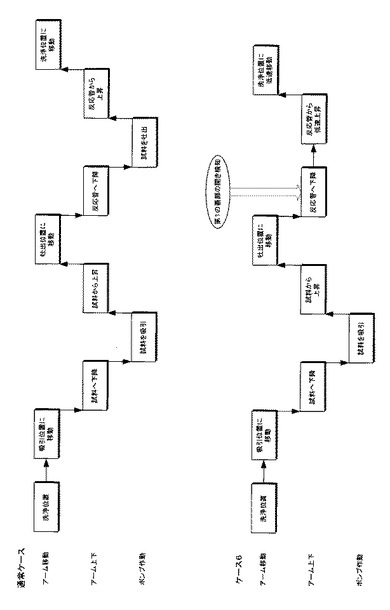
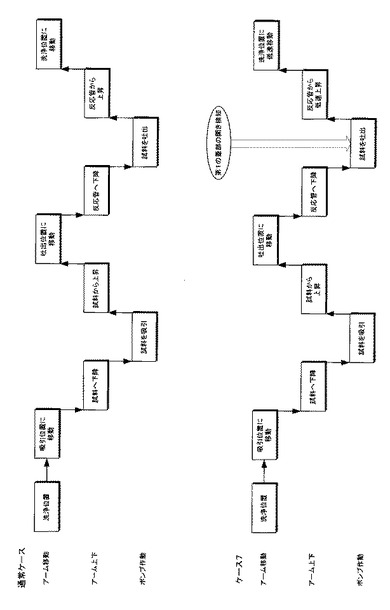
図9A乃至Hは、移動子の洗浄位置への待避を示すタイミングチャートである。上述したように、試料分注アーム5は、洗浄位置5cを原点位置として、最初に吸引位置5aへ移動、次に試料容器41内へのプローブの下降、次に特定した分注量の吸引、次に試料容器41外へのプローブの上昇、次に吐出位置5bへの移動、次に吐出位置5bにある反応管31へのプローブの下降、次に吸引した被検試料の吐出、次に反応管31外へのプローブの上昇、そして最後に洗浄位置5cへ復帰する。
【0068】
ケース1に示すように、試料分注アーム5を吸引位置5aへ移動させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で洗浄位置に回転させる。
【0069】
また、ケース2に示すように、試料分注アーム5を試料容器41内へ下降させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で伸張させてプローブを引き上げ、低速で洗浄位置5cに回転させる。
【0070】
また、ケース3に示すように、被検試料を吸引していたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で伸張させてプローブを引き上げ、低速で洗浄位置5cに回転させる。
【0071】
また、ケース4に示すように、プローブを試料容器41外へ上昇させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で洗浄位置5cに回転させる。
【0072】
また、ケース5に示すように、試料分注アーム5を吐出位置5bへ移動させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で洗浄位置5cに回転させる。
【0073】
また、ケース6に示すように、試料分注アーム5を反応管31内へ下降させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で伸張させてプローブを引き上げ、低速で洗浄位置5cに回転させる。
【0074】
また、ケース7に示すように、被検試料を吐出していたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で伸張させてプローブを引き上げ、低速で洗浄位置5cに回転させる。
【0075】
また、ケース8に示すように、プローブを反応管31外へ上昇させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で洗浄位置5cに回転させる。
【0076】
尚、低速とは、分注のための駆動装置12aに従動した回転速度よりも遅い速度である。例えば、駆動装置12aがステッピングモータである場合、パルスの繰り返し周波数を低くする。
【0077】
第2の蓋部112が開かれたときも駆動制御部13bの制御は同様となる。また、第2の蓋部112が開かれたときの第1試薬分注アーム6の駆動制御も同様となる。
【0078】
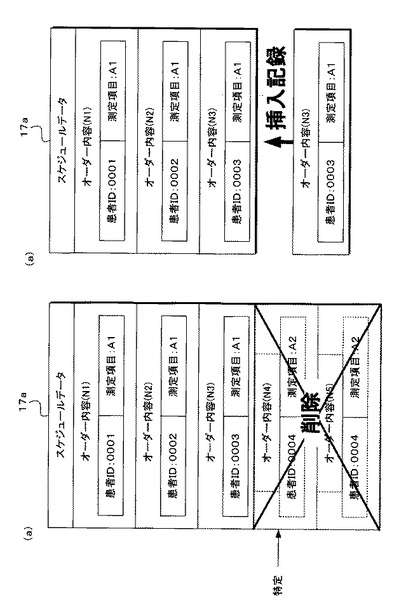
さらに、スケジュール作成部16は、開きの信号が入力されたときに特定されていたオーダー内容から下位に並ぶ全てのオーダー内容をスケジュールデータ17aから削除する。その一例を図10(a)に示す。第1の蓋部111の開きを示す信号が入力されたときに試料分注アーム5の駆動制御部13aが4番目のオーダー内容N4を特定していた場合、スケジュール作成部16は、その下位に並ぶ全てのオーダー内容N5、N6、・・・・をスケジュールデータ17aから削除する。また、スケジュール作成部16は、第2の蓋部112の開きを示す信号が入力されると、第1試薬分注アーム6の駆動制御部13bが特定していたオーダー内容から下位に並ぶ全てのオーダー内容を削除する。
【0079】
オーダー内容が削除されると、状況データ作成部18によってそのオーダー内容に係るフラグがそれ以上立てられることはないため、データ処理部21は、この開きの信号が入力されたときに分注工程の途中であった被検試料に対する測定結果データは出力しない。
【0080】
また、制御部11は、開きを示す信号が入力されると、スピーカ20に第1の蓋部111若しくは第2の蓋部112の開きを報知するブザーを一定期間出力させる。
【0081】
一方、第1の蓋部111の開きを示す信号が入力されても、試料分注アーム5以外の駆動は継続される。また、第2の蓋部112の開きを示す信号が入力されても、試料分注アーム5と第1試薬分注アーム6以外の駆動制御は継続される。
【0082】
即ち、自動分析装置100による分析工程は、被検試料の分注、第1試薬の分注、第2試薬の分注とこの順で経るが、その分注を果すアームを洗浄位置5c,6c,7cに待避させると、その段階でそのアームによる分注が終了していない全て被検試料に対する分析は未完了のまま終了させる。しかし、その段階でそのアームによる分注が終了している他の被検試料に対する分析はより下流の工程を経るように続行する。
【0083】
第1の蓋部111若しくは第2の蓋部112が閉じられて、その閉じを示す信号がセンサから入力されると、スケジュール作成部16は、スケジュールデータ17aを再作成する。制御部11は、その再作成されたスケジュールデータ17aに従った自動分析装置100の制御を再開する。
【0084】
スケジュールデータ17aの再作成では、ディスクサンプラ4の途中にある読取り器42で再開後に読み取られた被検試料を示す情報に対応するオーダー内容をスケジュールデータ17aの削除部分に順に記録していく。一例としては、図10(b)に示すように、再開後、ある被検試料a7の試料容器41のバーコードが読取り器42により読み取られ、その被検試料a7のオーダー内容N7がオーダー情報15aに記録されていると、削除によっても存続していたN1,N2,及びN3の次に、オーダー内容N7を記録する。
【0085】
再開後は、待避させていたアームは、洗浄位置5c,6c又は7cにあるため、そのまま洗浄位置5c,6c又は7cから吸引位置5a,6a又は7aへと順に工程を経ていく。
【0086】
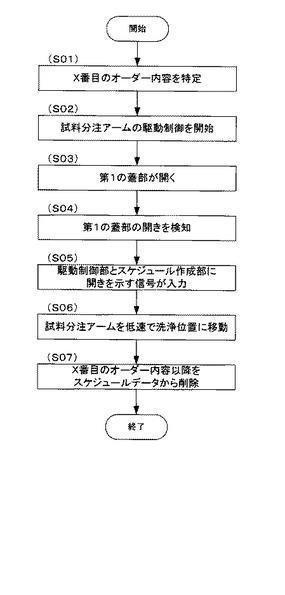
図11は、このようなカバーの開きを検知したときの自動分析装置100の動作を示すフローチャートである。この動作説明では、スケジュールデータ17aのX番目のオーダー内容を処理する際に第1の蓋部111が開かれた場合を例に説明する。
【0087】
まず、駆動制御部13aは、X番目のサイクルではスケジュールデータ17aのX番目のオーダー内容を特定し(S01)、そのオーダー内容が示す分注量を吸引及び吐出させるべく試料分注アーム5に対して分注のための駆動制御を開始する(S02)。
【0088】
この分注のための駆動制御の途中で、第1の蓋部111が開かれると(S03)、磁気センサ113bが第1の蓋部111の開きを検知し(S04)、駆動制御部13aとスケジュール作成部16に開きを示す信号が入力される(S05)。
【0089】
駆動制御部13aは、開きを示す信号が入力されると、試料分注アーム5を低速で洗浄位置5cに移動させる(S06)。このとき、ディスクサンプラ4の搬送も停止させる。さらに、スケジュール作成部16は、駆動制御部13aが特定していたX番目のオーダー内容以降をスケジュールデータ17aから削除する(S07)。
【0090】
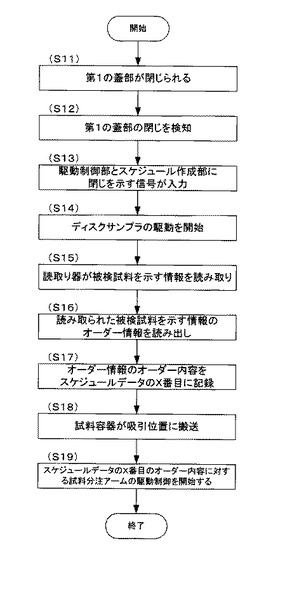
図12は、カバーの閉じを検知したときの自動分析装置100の動作を示すフローチャートである。この動作説明では、スケジュールデータ17aのX番目のオーダー内容を処理する際に第1の蓋部111が開かれ、その後第1の蓋部111が閉じられた場合を例に説明する。
【0091】
まず、第1の蓋部111が閉じられると(S11)、磁気センサ113bが第1の蓋部111の閉じを検知し(S12)、駆動制御部13aとスケジュール作成部16に閉じを示す信号が入力される(S13)。
【0092】
ディスクサンプラ4の駆動制御部13dは、閉じを示す信号が入力されると、ディスクサンプラ4の駆動を開始させる(S14)。ディスクサンプラ4の途中に設置されている読取り器42が被検試料を示す情報を読み取ると(S15)、スケジュール作成部16は、読み取られた被検試料を示す情報のオーダー情報15aをオーダー記憶部15から読み出し(S16)、読み出したオーダー情報15aのオーダー内容をスケジュールデータ17aのX番目に記録する(S17)。
【0093】
S15で読み取った被検試料を示す情報が貼着した試料容器41が吸引位置5aに搬送されてくると(S18)、駆動制御部13aは、スケジュールデータ17aのX番目のオーダー内容が示す分注量を吸引及び吐出させるべく試料分注アーム5の駆動制御を開始する(S19)。
【0094】
図13は、第2の蓋部112の開きを検知したときの自動分析装置100の動作を示すフローチャートである。尚、反応ディスク3が1サイクル毎に1周−1セル分回転し、第1試薬分注アーム6の吐出位置6bが試料分注アーム5の吐出位置5bの隣りにある場合を前提に説明するがこれに限られず、各種の態様で適用が可能である。
【0095】
まず、駆動制御部13bは、X+1番目のサイクルではスケジュールデータ17aのX番目のオーダー内容を特定し(S21)、そのオーダー内容が示す第1試薬とその分注量を吸引及び吐出させるべく第1試薬分注アーム6に対して分注のための駆動制御を開始する(S22)。
【0096】
この分注のための駆動制御の途中で、第2の蓋部112が開かれると(S23)、磁気センサ113dが第2の蓋部112の開きを検知し(S24)、駆動制御部13bとスケジュール作成部16に開きを示す信号が入力される(S25)。
【0097】
駆動制御部13bは、開きを示す信号が入力されると、試料分注アーム5と第1試薬分注アーム6とを低速で洗浄位置5c及び6cにそれぞれ移動させる(S26)。このとき、ディスクサンプラ4及び第1試薬の試薬ラック1bによる搬送も停止させる。さらに、スケジュール作成部16は、駆動制御部13bが特定していたX番目のオーダー内容以降をスケジュールデータ17aから削除する(S27)。
【0098】
図14は、第2の蓋部112の閉じを検知したときの自動分析装置100の動作を示すフローチャートである。この動作説明では、スケジュールデータ17aのX番目のオーダー内容に従って第1試薬を分注する際に第2の蓋部112が開かれ、その後第2の蓋部112が閉じられた場合を例に説明する。
【0099】
まず、第2の蓋部112が閉じられると(S31)、磁気センサ113dが第2の蓋部112の閉じを検知し(S32)、駆動制御部13bとスケジュール作成部16に閉じを示す信号が入力される(S33)。
【0100】
ディスクサンプラ4の駆動制御部13dと第1試薬の試薬ラック1bの駆動制御部13eは、閉じを示す信号が入力されると、ディスクサンプラ4の駆動を開始させる(S34)。ディスクサンプラ4の途中に設置されている読取り器42が被検試料を示す情報を読み取ると(S35)、スケジュール作成部16は、読み取られた被検試料を示す情報のオーダー情報15aをオーダー記憶部15から読み出し(S36)、読み出したオーダー情報15aのオーダー内容をスケジュールデータ17aのX番目に記録する(S37)。
【0101】
S35で読み取った被検試料を示す情報が貼着した試料容器41が吸引位置5aに搬送されてくると(S38)、駆動制御部13aは、スケジュールデータ17aのX番目のオーダー内容が示す分注量を吸引及び吐出させるべく試料分注アーム5の駆動制御を開始する(S39)。更に、駆動制御部13bは、S38で被検試料が分注された反応管31が吐出位置6bに搬送されてくると、スケジュールデータ17aのX番目のオーダー内容が示す第1試薬とその分注量を吸引及び吐出させるべく第1試薬分注アーム6の駆動制御を開始する(S40)。
【0102】
このように、この自動分析装置100は、カバーの開きを検知すると、アームを洗浄位置へ移動させるようにした。これにより、まず、カバーを開いた操作者がステージ110内に手を伸ばしてもアームは洗浄位置に待避しているため、この操作者に危害を与えるおそれを低減することができる。また、アームを洗浄位置に移動させているため、自動分析装置100の再開時には、このアームを直ちに吸引及び吐出の工程に移すことができ、アームを停止させる等により再開時には一度洗浄位置に移動して洗浄してから吸引及び吐出の工程に移る場合と比べ、迅速に分析工程に復帰させることができる。
【0103】
また、自動分析装置100には、試料分注アーム5、第1試薬分注アーム6、及び第2試薬分注アーム7等少なくとも2以上が配され、その一部はカバーの開閉口の近傍に配されることが多く、この場合、カバーの開きが検知されると、この開閉口の近傍に配されるアームを洗浄位置5c,6c又は7cへ移動させ、他のアームの分注の制御は継続するようにした。
【0104】
例えば、カバーは、ステージ110の少なくとも一部をそれぞれ覆う開閉が可能な第1の蓋部111及び第2の蓋部112等の複数の蓋部であり、各蓋部の開閉をそれぞれ検知するようにし、蓋部とその蓋部が覆う位置の近傍に配されたアームとをそれぞれ予め対応付けしておくようにし、蓋部の何れかの開きが検知されると、その開きが検知された蓋部に対応するアームを洗浄位置へ移動させるようにした。
【0105】
このように、危害を与えるおそれのあるアームのみを待避させるが、この待避させたアーム以外のユニットで分析工程を継続できる被検試料については分析を続行するため、安全性の確保とともに、分析の継続性を図ることができる。
【0106】
尚、本実施形態では、カバーは、第1の蓋部111と第2の蓋部112とからなり、それぞれの蓋部に対して洗浄位置に待避するアームが異なる例を説明したが、第1の蓋部111が開かれたときのみその開閉口の近傍に位置する試料分注アーム5を洗浄位置に待避させるようにし、第2の蓋部112が開かれたときには特別な待避動作を行わないようにしてもよい。また、第1の蓋部111が開かれたときには、全てのアームを洗浄位置に待避させるようにしてもよい。
【0107】
また、本実施形態では、第2の蓋部112が開かれると、被検試料の分注も停止される例を説明したが、被検試料の分注については継続するようにしてもよい。即ち、試料分注アーム5の分注のための駆動制御は継続してもよい。
【0108】
また、再開のときは、分注未完遂のオーダー情報15a、例えば読取り器42で再開後に読み取られた被検試料を示す情報に対するオーダー情報15aに基づいてスケジュールデータ17aを再作成して、その再作成したスケジュールデータ17aに従って分注を制御するようにすればよい。
【0109】
尚、カバーの開閉を検知するセンサとしては、磁気センサ113b,113dの他、近接センサ等の公知の各種のセンサを用いることができる。
【符号の説明】
【0110】
1 試薬庫
1a 試薬容器
1b 試薬ラック
3 反応ディスク
31 反応管
4 ディスクサンプラ
41 試料容器
42 読取り器
5 試料分注アーム
5a 吸引位置
5b 吐出位置
5c 洗浄位置
6 第1試薬分注アーム
6a 吸引位置
6b 吐出位置
6c 洗浄位置
7 第2試薬分注アーム
7a 吸引位置
7b 吐出位置
7c 洗浄位置
8 撹拌ユニット
9 測光ユニット
10 洗浄ユニット
11 制御部
12a,12b,12c,12d,12e,12f 駆動装置
13a,13b,13c,13d,13e,13f 駆動制御部
14 操作部
15 オーダー記憶部
15a オーダー情報
16 スケジュール作成部
17 スケジュール記憶部
17a スケジュールデータ
18 状況データ作成部
19 状況データ記憶部
20 スピーカ
21 データ処理部
22 モニタ
100 自動分析装置
110 ステージ
111 第1の蓋部
112 第2の蓋部
113a 磁性体
113b 磁気センサ
113c 磁性体
113d 磁気センサ
【技術分野】
【0001】
この発明は、被検試料と試薬とを分注して撹拌し、混合液を測定する自動分析装置に関する。
【背景技術】
【0002】
自動分析装置は、被検試料と試薬とを分注して混合液を測定する装置である。反応管に血液や尿等の被検試料と試薬とを分注してこれらを反応させた後、反応によって生じる色調の変化を光測定することにより検体中の被測定物質または酵素の濃度や活性を測定する。
【0003】
この自動分析装置では、筐体の上面をステージに設定し、ステージ上に、被検試料を収納した試料容器、試薬を収納した試薬容器、被検試料及び試薬が分注される反応管、試料容器を搬送する搬送路、試薬容器を搬送する搬送路、反応管を搬送する搬送路、試料容器から被検試料を吸引して反応管に吐出するために回転するアーム、試薬容器から試薬を吸引して反応管に吐出するために回転するアーム、反応管内を撹拌する撹拌ユニット、混合液を測光する測光ユニット、各アームに支持されているプローブや反応管を洗浄する各洗浄ユニットが配置され、それぞれが駆動している。
【0004】
そのため、これら駆動ユニットを保護するため、被検試料や試薬の温度を保つため、及び操作者に対する安全のため、この自動分析装置には、ステージを覆うカバーが開閉可能に取り付けられている。
【0005】
このような自動分析装置では、被検試料や試薬を交換する際、このカバーを開いてステージを開放した状態とし、操作者がステージ上に手を伸ばして試料容器や試薬容器を交換する。そのため、操作者の手とアームとが干渉してしまうことで、自動分析装置に損傷を与えてしまうおそれや、操作者に危害を加えてしまうおそれがある。
【0006】
そこで、従来は、カバーの開きを検知するセンサを取り付けておき、カバーが開かれると、装置の測定動作を停止するようにしていた(例えば、「特許文献1」参照。)。具体的には、試料容器の搬送路、試薬容器の搬送路、反応管の搬送路、各アームの回転を止める。移動する部材がなくなることで、少なくとも操作者に対する安全を確保し、自動分析装置の損傷を防ぐことができる。
【0007】
しかし、このような自動分析装置では、アーム等を直ちに停止させると、アームに支持されているプローブに被検試料や試薬が付着したままの可能性もあるため、再開後は、まず洗浄から始めなくてはならず、停止前の状態への復帰に遅延が生じていた。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第3808895号
【発明の概要】
【発明が解決しようとする課題】
【0009】
この発明は、上述のような問題点に鑑みてなされたものであり、その目的とするところは、カバーの開きを検知して装置を停止させても分析再開後は停止前の状態へ速やかに復帰することのできる自動分析装置を提供するものである。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明に係る自動分析装置の態様は、ステージ上で被検試料と試薬とを反応管に分注して混合液を測定し、その測定結果を表示手段に出力する自動分析装置であって、プローブを有し、前記ステージ上で、該プローブの洗浄位置、前記被検試料又は前記試薬の吸引位置、及び前記被検試料又は前記試薬の吐出位置にこの順で移動を繰り返す分注駆動をすることにより、前記反応管に前記被検試料又は前記試薬を分注するアームと、前記ステージの少なくとも一部を覆い、開閉が可能なカバーと、前記カバーの開閉を検知するセンサと、前記アームの分注駆動を制御するとともに、前記センサにより前記カバーの開きが検知されると、前記アームの前記分注駆動を停止させて前記洗浄位置へ移動させる制御手段と、を備えること、を特徴とする。
【0011】
前記制御手段は、前記センサにより前記カバーの開きが検知されると、前記アームを前記分注の制御による移動よりも低速で前記洗浄位置へ移動させるようにしてもよい。
【0012】
前記アームは、少なくとも2以上が配されるとともに、その一部のアームは前記カバーの開閉口の近傍に配され、前記制御手段は、前記カバーの開きが検知されると、前記一部のアームの前記分注駆動を停止させて前記洗浄位置へ移動させるとともに、他のアームの前記分注駆動の制御を継続するようにしてもよい。
【0013】
前記カバーは、ステージの少なくとも一部をそれぞれ覆う開閉が可能な複数の蓋部であり、前記センサは、前記各蓋部の開閉をそれぞれ検知し、前記アームは、少なくとも2以上が配され、前記制御手段は、前記各蓋部とその蓋部が覆う位置の近傍に配された前記各アームとを予め対応付けするとともに、前記蓋部の何れかの開きが検知されると、その開きが検知された前記蓋部に対応する前記アームの前記分注駆動を停止させて前記洗浄位置へ移動させるようにしてもよい。
【0014】
前記センサが前記カバーの開きを検知すると、前記カバーの開きを報知する報知手段を更に備えるようにしてもよい。
【0015】
前記報知手段は、ブザーを出力するスピーカであるようにしてもよい。
【0016】
前記表示手段は、前記センサが前記カバーの開きを検知したときに前記分注の途中であった前記被検試料に対する前記測定結果を出力しないようにしてもよい。
【0017】
前記制御手段は、前記センサが前記カバーの閉じを検知すると、前記洗浄位置へ移動させていた前記アームに対する前記分注駆動の制御を再開するようにしてもよい。
【0018】
前記制御手段は、前記被検試料に対するオーダー内容を搬送順に記録したスケジュールデータを作成する作成手段と、当該スケジュールデータから参照するオーダー内容を特定して、そのオーダー内容に従って前記分注駆動を制御する駆動制御手段と、を有し、前記作成手段は、前記カバーの開きが検知されると、前記特定したオーダー内容以下を前記スケジュールデータから削除するとともに、前記カバーの閉じが検知されると、新たに搬送されてきた前記被検試料に対するオーダー内容を削除部分から記録し直すことで前記スケジュールデータを再作成し、前記駆動制御手段は、前記カバーの閉じが検知されると、その再作成されたスケジュールデータに従って前記分注駆動を制御するようにしてもよい。
【発明の効果】
【0019】
本発明によれば、カバーを開いた操作者がステージ内に手を伸ばしてもアームは洗浄位置に待避しているため、この操作者に危害を与えるおそれを低減することができる。また、アームを洗浄位置に移動させているため、自動分析装置の再開時には、このアームを直ちに吸引及び吐出の工程に移すことができ、迅速に分析工程に復帰させることができる。
【図面の簡単な説明】
【0020】
【図1】自動分析装置のステージ上の構成を示す。
【図2】自動分析装置の外観を正面から示す。
【図3】自動分析装置の外観を側面から示す。
【図4】カバーの開閉を検知するセンサを示す。
【図5】自動分析装置の制御部の構成を示す。
【図6】スケジュールデータを示す。
【図7】オーダー情報を示す。
【図8】状況データを示す。
【図9A】吸引位置に移動しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9B】被検試料に下降しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9C】被検試料を吸引しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9D】被検試料から上昇しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9E】吐出位置に移動しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9F】反応管に下降しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9G】被検試料を吐出しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図9H】反応管から上昇しているときのアームの洗浄位置への待避を示すタイミングチャートである。
【図10】スケジュールデータの作成を示す模式図である。
【図11】第1の蓋部に係るカバーの開きを検知したときの自動分析装置の動作を示すフローチャートである。
【図12】第1の蓋部に係るカバーの閉じを検知したときの自動分析装置の動作を示すフローチャートである。
【図13】第2の蓋部に係るカバーの開きを検知したときの自動分析装置の動作を示すフローチャートである。
【図14】第2の蓋部に係るカバーの閉じを検知したときの自動分析装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明に係る自動分析装置の好適な実施形態について、図面を参照しながら具体的に説明する。
【0022】
図1に示す自動分析装置100は、被検試料と試薬とを分注してその混合液の反応を分析することにより、被検試料に含まれる化学成分を分析する装置である。反応管31に血液や尿等の被検試料と試薬とを移してこれらを反応させた後、反応によって生じる色調の変化を光測定することにより検体中の被測定成分または酵素の濃度や活性を測定する。
【0023】
この自動分析装置100は、筐体の上面にステージ110を有し、このステージ110上に反応ディスク3、ディスクサンプラ4、試料分注アーム5、試薬庫1、第1試薬分注アーム6、第2試薬分注アーム7、撹拌ユニット8、測光ユニット9、及び洗浄ユニット10を配する。
【0024】
反応ディスク3は、反応管31を搬送する円周の搬送路であり、ステージ110の中心付近に配置される。この反応ディスク3は、反応管31を周方向に一列に並べて1サイクル毎に所定角度回転する。所定角度は、例えば、1周−1セル分である。即ち、反応ディスク3は、1サイクル毎の回転の結果、反応管31を1セル分移動させる。
【0025】
ディスクサンプラ4は、被検試料を収容した試料容器41を搬送する搬送路であり、ステージ110の正面の辺に沿って配置され、反応ディスク3の近傍に至る。このディスクサンプラ4は、試料容器41を一列に並べて1サイクル毎に試料容器41を1本分移動させる。
【0026】
ディスクサンプラ4の搬送路の途中には、バーコードを読み取るCCD等の読取り器42が設置されている。試料容器41には、その試料容器41内に収容されている被検試料を示す情報としてバーコードが貼着されている。読取り器42は、その前を通過した試料容器41に貼着されたバーコードから被検試料を示す情報を読み取る。被検試料を示す情報は、例えば被検試料の提供元である患者のIDである。
【0027】
試料分注アーム5は、ディスクサンプラ4上の試料容器41から被検試料を吸引し、反応ディスク3上の反応管31に吐出する。この試料分注アーム5は、反応ディスク3とディスクサンプラ4との間に立設する移動子であり、ステージ110の正面近傍に配置される。つまり、正面からステージ110上に手を突っ込むと試料分注アーム5と手が干渉しやすい。
【0028】
試料分注アーム5は、支柱とその支柱上部から水平方向に延びた保持部を有する逆L字形状を有し、保持部先端には、図示しないプローブを下方に垂れ下げて支持している。試料分注アーム5の支柱は軸回転可能に保持され、また2重筒構造を有して伸縮自在となっており、駆動装置12a(図5参照)の駆動に従動して支柱を中心に回転可動領域で回転し、駆動装置12aの駆動に従動して伸縮する。
【0029】
試料分注アーム5の回転可動領域の両端は、それぞれディスクサンプラ4上の一カ所、反応ディスク3上の一カ所に位置する。このディスクサンプラ4上の一カ所を被検試料の吸引位置5aとし、試料分注アーム5は、駆動装置12aの駆動に従動して吸引位置5aに位置する試料容器41上にプローブを位置させて下降し、試料容器41内にプローブを差し込む。また、反応ディスク3上の一カ所を被検試料の吐出位置5bとし、試料分注アーム5は、駆動装置12aの駆動に従動して吐出位置5bに位置する反応管31上にプローブを位置させて下降し、反応管31内にプローブを差し込む。
【0030】
回転可動領域の途中には、洗浄ユニット10が配されている。試料分注アーム5は、駆動装置12aの駆動に従動して洗浄ユニット10の洗浄位置5cにプローブを位置させて、被検試料が付着したプローブを洗浄する。
【0031】
プローブは、所謂ストローであり、図示しないポンプからかけられた負圧によって被検試料を試料容器41から吸引し、正圧によって被検試料を反応管31に吐出する。
【0032】
試薬庫1は、円筒形状を有し、ステージ110の正面に向かって左側面側に配置される。この試薬庫1には、試薬ラック1b(図5参照)が軸回転可能に収容されている。試薬ラック1bには、第1試薬を収容した試薬容器1a及び第2試薬を収容した試薬容器1aが収納される。第1試薬を収容した試薬容器1aは、試薬庫1の最外部に周方向に沿って並べられる。第2試薬を収容した試薬容器1aは、第1試薬を収容した試薬容器1aの並びよりも内周部に周方向に沿って並べられる。この試薬庫1は、第1試薬及び第2試薬の温度を調整する恒温槽となっており、上面はスライドにより開口する蓋部により覆われている。
【0033】
試薬庫1の内壁には、図示しない読取り器が配置されており、また第1試薬と第2試薬の試薬容器1aには読取り器に対向するようにバーコード等で示される試薬情報が貼着されている。試薬ラック1bを一回転させて、読取り器でバーコードを読み取ることで、試薬容器1a内の試薬の種類とその試薬容器1aの載置位置が特定される。
【0034】
第1試薬分注アーム6は、試薬庫1内の最外部に並ぶ試料容器41から第1試薬を吸引し、反応ディスク3上の反応管31に吐出する。第2試薬分注アーム7は、試薬庫1内の内周部に並ぶ試料容器41から第2試薬を吸引し、反応ディスク3上の反応管31に吐出する。
【0035】
これら第1試薬分注アーム6及び第2試薬分注アーム7も逆L字形状を有し、プローブを下方に垂れ下げて支持している。また、第1試薬分注アーム6及び第2試薬分注アーム7もそれぞれの駆動装置12b,12c(図5参照)に従動して、軸回転可能及び伸縮自在となっている。
【0036】
この第1試薬分注アーム6と第2試薬分注アーム7は、それぞれ反応ディスク3と試薬庫1との間に立設するように、ステージ110の左側面近傍に配置される。特に第1試薬分注アーム6は、試薬庫1を覆う蓋部の開口近傍に配置される。つまり、試薬庫1がある左側面側からステージ110上に手を突っ込むと第1試薬分注アーム6と手が干渉しやすい。
【0037】
また、これら第1試薬分注アーム6及び第2試薬分注アーム7の回転可動領域の両端も、それぞれ試薬庫1上の吸引位置6a,7a、反応ディスク3上の吐出位置6b,7bとなり、図示しないポンプによって第1試薬及び第2試薬をそれぞれ吸引及び吐出する。さらに、回転可動領域の途中には、洗浄ユニット10が配され、第1試薬分注アーム6及び第2試薬分注アーム7は、駆動装置12b,12cの駆動に従動して洗浄ユニット10の洗浄位置6c,7cにプローブを位置させて、第1試薬又は第2試薬が付着したプローブを洗浄させる。
【0038】
撹拌ユニット8は、反応ディスク3上に位置し、1サイクル毎に、撹拌位置に停止した反応管31内における被検試料+第1試薬や被検試料+第1試薬+第2試薬などの混合液を撹拌する。
【0039】
測光ユニット9は、反応ディスク3上に位置し、混合液を収容した反応管31を測光位置から測定する。測光ユニット9は、反応管31を挟んで配置される光源と受光部を有し、例えば、混合液の吸光度を測光した後、その測定結果データを出力する。
【0040】
洗浄ユニット10は、反応ディスク3上、試料分注アーム5、第1試薬分注アーム6、及び第2試薬分注アーム7の洗浄位置5c,6c,7cに配置され、反応管31と各プローブを洗浄及び乾燥する。
【0041】
この自動分析装置100では、図2及び図3に示すように、運転時の安全及び被検試料や試薬や混合液の汚染防止の観点からステージ110を覆うカバーを有している。このカバーは、例えば第1の蓋部111及び第2の蓋部112等の1以上の蓋部で構成される。
【0042】
図2に示すように、第1の蓋部111は、ステージ110の全体を覆うカバーであり、ステージ110の奥側の端辺でヒンジ等により筐体と開閉可能に接続される。この第1の蓋部111は、ステージ110の正面側が開閉口となる。第1の蓋部111は、自動分析装置100のセッティングの際の他、被検試料を収容した試料容器41の載置及び取り外しの際に開閉される。ステージ110の正面近傍に位置する試料分注アーム5は、この第1の蓋部111の開閉口の近傍に位置する。
【0043】
図2及び図3に示すように、第1の蓋部111の左側は、天井壁と側壁の一部が切り欠かれており、第2の蓋部112は、この切り欠き部分に第1の蓋部111と分割されて設けられている。この切り欠き部分は、試薬庫1を覆う蓋部の開口の最寄りに位置する。即ち、この第2の蓋部112は、第1試薬及び第2試薬の交換の際に主に開閉される。この第2の蓋部112を設けることによりステージ110全体を覆う第1の蓋部111を開ける必要がなくなる。試薬庫1を覆う蓋部の開口近傍に位置する第1試薬分注アーム6は、この第2の蓋部112の開閉口の近傍に位置することとなる。
【0044】
これら第1の蓋部111及び第2の蓋部112には、カバーの開閉を検知すべく、それぞれセンサが設けられている。第1の蓋部111には、この第1の蓋部111の開閉を検知する磁気センサ113bとこれと対になった磁性体113aが設けられている。第2の蓋部112には、この第2の蓋部112の開閉を検知する磁気センサ113dとこれと対になった磁性体113cが設けられている。
【0045】
図4で第1の蓋部111の開閉を検知するセンサの詳細を例示する。例えば、第1の蓋部111の裏面及びこの第1の蓋部111が閉じられたときのステージ110上の対向位置には、それぞれ突出片が立設されている。これら突出片は、第1の蓋部111が閉じられたときに先端が近接してすれ違うように位置及び高さが調節されている。一方の突出片の先端には磁性体113aが取り付けられ、他方の突出片の先端には、磁気を検出する磁気センサ113bが取り付けられている。この磁気センサ113bは、第1の蓋部111が閉じられたときに磁性体113aの磁気を検知し、第1の蓋部111が開けられたときに磁気の消失を検知する。
【0046】
第2の蓋部112の開閉を検知する磁気センサ113dと磁性体113cも、第2の蓋部112が閉じられるとこれらが近接して磁気が検知されるように、第2の蓋部112側とステージ110とに分かれて設けられており、磁気センサ113dは、第2の蓋部112が閉じられたときに磁性体113cの磁気を検知し、第2の蓋部112が開けられたときに磁気の消失を検知する。
【0047】
図5は、このような自動分析装置100を制御する制御部11の構成を示すブロック図である。図5に示すように、制御部11は、各ユニットを駆動させる各駆動装置12a,12b,12c,12d,12e,12f・・・とその駆動制御部13a,13b,13c,13d,13e,13f・・・・、操作部14、オーダー記憶部15、スケジュール作成部16、スケジュール記憶部17、状況データ作成部18、状況データ記憶部19、スピーカ20、データ処理部21、及びモニタ22を備える。
【0048】
この制御部11は、主に自動分析装置100の各ユニットの駆動制御、カバーが開いたときの移動子の待避制御、及びカバーが閉じたときの再開制御を行う。
【0049】
各駆動装置12a,12b,12c,12d,12e,12f・・・・は、モータやギア、またはこれに加えてポンプや発振器等を含み各ユニットを従動させる。例えば、ディスクサンプラ4、試薬ラック1b、反応ディスク3を従動させる各駆動装置12d,12e,12f・・・・は、これらを回転させる。試料分注アーム5、第1試薬分注アーム6、及び第2試薬分注アーム7の各駆動装置12a,12b,12cは、これらを吸引位置5a,6a,7a、吐出位置5b,6b,7b、及び洗浄位置5c,6c,7cに移動させ、プローブを下降又は上昇させるとともに、負圧及び正圧をかけて被検試料や試薬を吸引吐出させる。
【0050】
駆動制御部13a,13b,13c,13d,13e,13f・・・は、これら各駆動装置12a,12b,12c,12d,12e,12f・・・に1サイクル毎に予め定まったタイミングに予め定まった時間だけ制御信号を出力して正転や反転等の駆動をさせることで、従動する反応ディスク3、ディスクサンプラ4、試薬ラック1b、試料分注アーム5、第1試薬分注アーム6、及び第2試薬分注アーム7を所望位置に移動させる。
【0051】
この駆動制御部13a,13b,13c,13d,13e,13f・・・による各ユニットの制御は、スケジュール記憶部17に記憶されているスケジュールデータ17aに従う。このスケジュールデータ17aは、オーダー記憶部15に記憶されているオーダー情報15aに基づき作成される。図6は、スケジュールデータ17aを示す図である。また、図7は、オーダー情報15aを示す図である。
【0052】
スケジュールデータ17aは、ディスクサンプラ4で搬送されてくる被検試料の順にそのオーダー内容を並べたデータである。スケジュール作成部16には、試料容器41が読取り器42の前を通過することで読み取られた被検試料を示す情報が入力される。スケジュール作成部16は、入力された被検試料を示す情報を含むオーダー情報15aをオーダー記憶部15から読み出し、被検試料を示す情報とそのオーダー情報15aに含まれる測定項目をオーダー内容としてスケジュールデータ17aに並べて記録する。
【0053】
オーダー情報15aには、被検試料の提供元である患者ID等の被検試料を示す情報と測定項目が記憶されており、キーボードやマウス等の操作部14を用いて予め入力され、オーダー記憶部15に記憶される。
【0054】
ディスクサンプラ4の駆動制御部13dは、ディスクサンプラ4を1サイクル毎に1容器分駆動させている。試料分注アーム5の駆動制御部13aは、試料容器41が搬送されてくると、スケジュールデータ17aを参照して、その試料容器41の搬送順番に一致する順番に並ぶオーダー内容を特定する。さらに、この駆動制御部13aは、特定したオーダー内容から測定項目を読み出し、その測定項目に合致した被検試料の分注量を特定する。
【0055】
そして、この駆動制御部13aは、試料分注アーム5を分注駆動させる。即ち、試料分注アーム5に、洗浄位置5cから吸引位置5aへの移動、試料容器41内へのプローブの下降、特定した分注量の吸引、試料容器41外へのプローブの上昇、吐出位置5bへの移動、吐出位置5bにある反応管31へのプローブの下降、吸引した被検試料の吐出、反応管31外へのプローブの上昇、及び洗浄位置5cへの移動をこの順で行わせる。
【0056】
反応ディスク3の駆動制御部13fは、反応ディスク3を1サイクル毎に1周−1セル分回転させている。第1試薬分注アーム6の駆動制御部13bは、被検試料が分注された反応管31が搬送されてくると、スケジュールデータ17aを参照して、その反応管31の搬送順番に一致する順番に並ぶオーダー内容を特定する。さらに、この駆動制御部13bは、特定したオーダー内容から測定項目を読み出し、その測定項目に合致した第1試薬とその分注量を特定する。
【0057】
そして、この駆動制御部13bは、第1試薬分注アーム6を分注駆動させる。即ち、第1試薬分注アーム6に、洗浄位置6cから吸引位置6aへの移動、第1試薬の試薬容器1a内へのプローブの下降、特定した分注量の吸引、試薬容器1a外へのプローブの上昇、吐出位置6bへの移動、吐出位置6bにある反応管31へのプローブの下降、吸引した被検試料の吐出、反応管31外へのプローブの上昇、及び洗浄位置への移動をこの順で行わせる。
【0058】
同時に、試薬ラック1bの駆動制御部13eは、測定項目に合致した第1試薬が収納された試薬容器1aを第1試薬分注アーム6の吸引位置7aに位置させるように、試薬ラック1bを回転させる。
【0059】
第2試薬分注アーム7の駆動制御部13cは、被検試料が分注された反応管31が搬送されてくると、スケジュールデータ17aを参照して、その反応管31の搬送順番に一致する順番に並ぶオーダー内容を特定する。さらに、この駆動制御部13cは、特定したオーダー内容から測定項目を読み出し、その測定項目に合致した第2試薬とその分注量を特定する。
【0060】
そして、この駆動制御部13cは、第2試薬分注アーム7を分注駆動させる。即ち、第2試薬分注アーム7に、洗浄位置7cから吸引位置7aへの移動、第2試薬の試薬容器1a内へのプローブの下降、特定した分注量の吸引、試薬容器1a外へのプローブの上昇、吐出位置7bへの移動、吐出位置7bにある反応管31へのプローブの下降、吸引した被検試料の吐出、反応管31外へのプローブの上昇、及び洗浄位置7cへの移動をこの順で行わせる。
【0061】
同時に、試薬ラック1bの駆動制御部13eは、測定項目に合致した第2試薬が収納された試薬容器1aを第2試薬分注アーム7の吸引位置7aに位置させるように、試薬ラック1bを回転させる。
【0062】
状況データ作成部18は、被検試料や第1試薬や第2試薬の分注がそれぞれ終了すると、その終了を反映した状況データを更新する。図8は、状況データを示す図である。状況データ18aは、現在の分注状況を示すようにサイクル毎に更新される。この状況データには、スケジュールデータ17aに記録されたオーダー内容が示す被検試料の分注、第1試薬の分注、第2試薬の分注の終了を示す情報が記録される。例えば、終了を示す情報は、フラグであり、被検試料の分注、第1試薬の分注、第2試薬の分注の終了を示すフラグをオーダー内容毎に状況データに立てる。
【0063】
データ処理部21は、測光ユニット9から出力された測定結果データを演算処理して検量線データや分析データを生成し、備え付けのモニタ22やプリンタに出力させる。出力させる測定結果データ等は、状況データ作成部18で全ての分注の終了を示すフラグが立てられたオーダーに対する。
【0064】
ここで、第1の蓋部111の開閉口近傍に位置する試料分注アーム5の駆動制御部13aには、第1の蓋部111の開閉を検知する磁気センサ113bからの信号が入力される。また、第2の蓋部112の開閉口近傍に位置する第1試薬分注アーム6の駆動制御部13b及び試料分注アーム5の駆動制御部13aには、第2の蓋部112の開閉を検知する磁気センサ113dからの信号が入力される。
【0065】
即ち、開閉される蓋部の種類とその開閉が駆動に影響するアームとが対応付けられている。その対応付けは、蓋部とアームとの位置関係による。第2の蓋部112の開閉の検知が試料分注アーム5の駆動制御部13aにも入力されるのは、被検試料を分注しても第1試薬が分注されなければ分析が完遂できないからであり、即ち下流の分注制限がその上流の分注にも影響を与えるためである。
【0066】
試料分注アーム5の駆動制御部13aは、第1の蓋部111の開きを示す信号が入力されると、試料分注アーム5を洗浄位置5cに待避させる。第1試薬分注アーム6の駆動制御部13bは、第2の蓋部112の開きを示す信号が入力されると、第1試薬分注アーム6を洗浄位置6cに待避させる。また、第2の蓋部112の開きを示す信号が入力されると、試料分注アーム5の駆動制御部13aは、試料分注アーム5を洗浄位置5cに待避させる。
【0067】
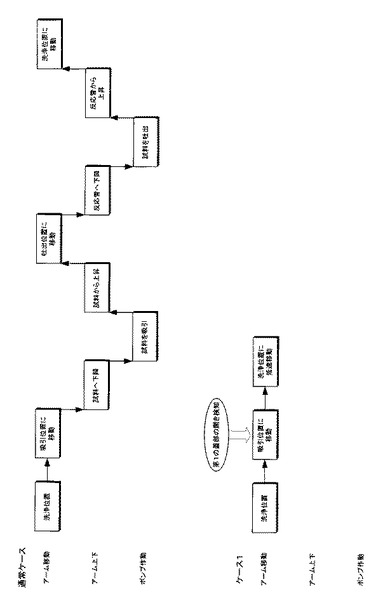
図9A乃至Hは、移動子の洗浄位置への待避を示すタイミングチャートである。上述したように、試料分注アーム5は、洗浄位置5cを原点位置として、最初に吸引位置5aへ移動、次に試料容器41内へのプローブの下降、次に特定した分注量の吸引、次に試料容器41外へのプローブの上昇、次に吐出位置5bへの移動、次に吐出位置5bにある反応管31へのプローブの下降、次に吸引した被検試料の吐出、次に反応管31外へのプローブの上昇、そして最後に洗浄位置5cへ復帰する。
【0068】
ケース1に示すように、試料分注アーム5を吸引位置5aへ移動させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で洗浄位置に回転させる。
【0069】
また、ケース2に示すように、試料分注アーム5を試料容器41内へ下降させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で伸張させてプローブを引き上げ、低速で洗浄位置5cに回転させる。
【0070】
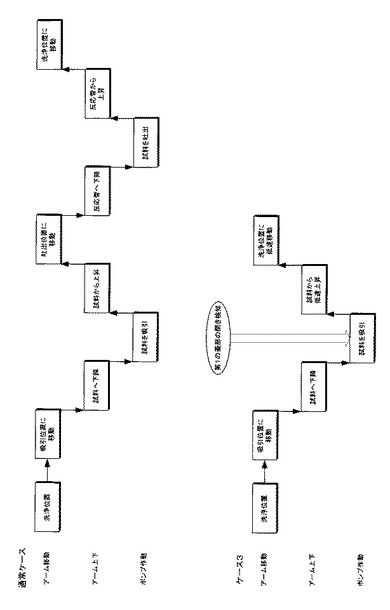
また、ケース3に示すように、被検試料を吸引していたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で伸張させてプローブを引き上げ、低速で洗浄位置5cに回転させる。
【0071】
また、ケース4に示すように、プローブを試料容器41外へ上昇させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で洗浄位置5cに回転させる。
【0072】
また、ケース5に示すように、試料分注アーム5を吐出位置5bへ移動させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で洗浄位置5cに回転させる。
【0073】
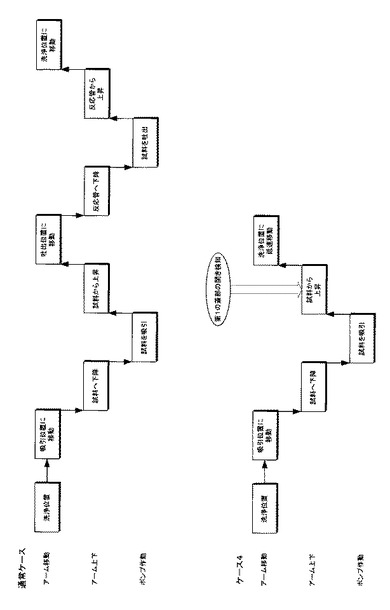
また、ケース6に示すように、試料分注アーム5を反応管31内へ下降させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で伸張させてプローブを引き上げ、低速で洗浄位置5cに回転させる。
【0074】
また、ケース7に示すように、被検試料を吐出していたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で伸張させてプローブを引き上げ、低速で洗浄位置5cに回転させる。
【0075】
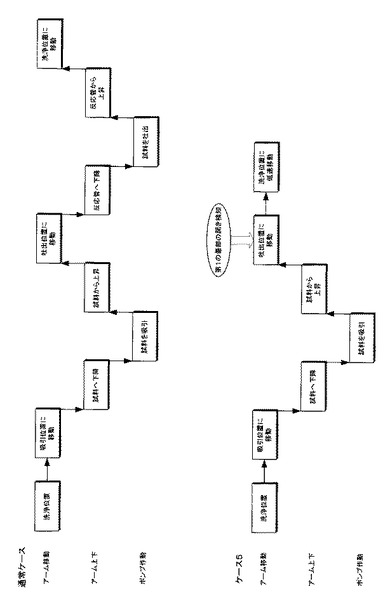
また、ケース8に示すように、プローブを反応管31外へ上昇させていたときに第1の蓋部111の開きが検知されると、駆動制御部13aは、試料分注アーム5を低速で洗浄位置5cに回転させる。
【0076】
尚、低速とは、分注のための駆動装置12aに従動した回転速度よりも遅い速度である。例えば、駆動装置12aがステッピングモータである場合、パルスの繰り返し周波数を低くする。
【0077】
第2の蓋部112が開かれたときも駆動制御部13bの制御は同様となる。また、第2の蓋部112が開かれたときの第1試薬分注アーム6の駆動制御も同様となる。
【0078】
さらに、スケジュール作成部16は、開きの信号が入力されたときに特定されていたオーダー内容から下位に並ぶ全てのオーダー内容をスケジュールデータ17aから削除する。その一例を図10(a)に示す。第1の蓋部111の開きを示す信号が入力されたときに試料分注アーム5の駆動制御部13aが4番目のオーダー内容N4を特定していた場合、スケジュール作成部16は、その下位に並ぶ全てのオーダー内容N5、N6、・・・・をスケジュールデータ17aから削除する。また、スケジュール作成部16は、第2の蓋部112の開きを示す信号が入力されると、第1試薬分注アーム6の駆動制御部13bが特定していたオーダー内容から下位に並ぶ全てのオーダー内容を削除する。
【0079】
オーダー内容が削除されると、状況データ作成部18によってそのオーダー内容に係るフラグがそれ以上立てられることはないため、データ処理部21は、この開きの信号が入力されたときに分注工程の途中であった被検試料に対する測定結果データは出力しない。
【0080】
また、制御部11は、開きを示す信号が入力されると、スピーカ20に第1の蓋部111若しくは第2の蓋部112の開きを報知するブザーを一定期間出力させる。
【0081】
一方、第1の蓋部111の開きを示す信号が入力されても、試料分注アーム5以外の駆動は継続される。また、第2の蓋部112の開きを示す信号が入力されても、試料分注アーム5と第1試薬分注アーム6以外の駆動制御は継続される。
【0082】
即ち、自動分析装置100による分析工程は、被検試料の分注、第1試薬の分注、第2試薬の分注とこの順で経るが、その分注を果すアームを洗浄位置5c,6c,7cに待避させると、その段階でそのアームによる分注が終了していない全て被検試料に対する分析は未完了のまま終了させる。しかし、その段階でそのアームによる分注が終了している他の被検試料に対する分析はより下流の工程を経るように続行する。
【0083】
第1の蓋部111若しくは第2の蓋部112が閉じられて、その閉じを示す信号がセンサから入力されると、スケジュール作成部16は、スケジュールデータ17aを再作成する。制御部11は、その再作成されたスケジュールデータ17aに従った自動分析装置100の制御を再開する。
【0084】
スケジュールデータ17aの再作成では、ディスクサンプラ4の途中にある読取り器42で再開後に読み取られた被検試料を示す情報に対応するオーダー内容をスケジュールデータ17aの削除部分に順に記録していく。一例としては、図10(b)に示すように、再開後、ある被検試料a7の試料容器41のバーコードが読取り器42により読み取られ、その被検試料a7のオーダー内容N7がオーダー情報15aに記録されていると、削除によっても存続していたN1,N2,及びN3の次に、オーダー内容N7を記録する。
【0085】
再開後は、待避させていたアームは、洗浄位置5c,6c又は7cにあるため、そのまま洗浄位置5c,6c又は7cから吸引位置5a,6a又は7aへと順に工程を経ていく。
【0086】
図11は、このようなカバーの開きを検知したときの自動分析装置100の動作を示すフローチャートである。この動作説明では、スケジュールデータ17aのX番目のオーダー内容を処理する際に第1の蓋部111が開かれた場合を例に説明する。
【0087】
まず、駆動制御部13aは、X番目のサイクルではスケジュールデータ17aのX番目のオーダー内容を特定し(S01)、そのオーダー内容が示す分注量を吸引及び吐出させるべく試料分注アーム5に対して分注のための駆動制御を開始する(S02)。
【0088】
この分注のための駆動制御の途中で、第1の蓋部111が開かれると(S03)、磁気センサ113bが第1の蓋部111の開きを検知し(S04)、駆動制御部13aとスケジュール作成部16に開きを示す信号が入力される(S05)。
【0089】
駆動制御部13aは、開きを示す信号が入力されると、試料分注アーム5を低速で洗浄位置5cに移動させる(S06)。このとき、ディスクサンプラ4の搬送も停止させる。さらに、スケジュール作成部16は、駆動制御部13aが特定していたX番目のオーダー内容以降をスケジュールデータ17aから削除する(S07)。
【0090】
図12は、カバーの閉じを検知したときの自動分析装置100の動作を示すフローチャートである。この動作説明では、スケジュールデータ17aのX番目のオーダー内容を処理する際に第1の蓋部111が開かれ、その後第1の蓋部111が閉じられた場合を例に説明する。
【0091】
まず、第1の蓋部111が閉じられると(S11)、磁気センサ113bが第1の蓋部111の閉じを検知し(S12)、駆動制御部13aとスケジュール作成部16に閉じを示す信号が入力される(S13)。
【0092】
ディスクサンプラ4の駆動制御部13dは、閉じを示す信号が入力されると、ディスクサンプラ4の駆動を開始させる(S14)。ディスクサンプラ4の途中に設置されている読取り器42が被検試料を示す情報を読み取ると(S15)、スケジュール作成部16は、読み取られた被検試料を示す情報のオーダー情報15aをオーダー記憶部15から読み出し(S16)、読み出したオーダー情報15aのオーダー内容をスケジュールデータ17aのX番目に記録する(S17)。
【0093】
S15で読み取った被検試料を示す情報が貼着した試料容器41が吸引位置5aに搬送されてくると(S18)、駆動制御部13aは、スケジュールデータ17aのX番目のオーダー内容が示す分注量を吸引及び吐出させるべく試料分注アーム5の駆動制御を開始する(S19)。
【0094】
図13は、第2の蓋部112の開きを検知したときの自動分析装置100の動作を示すフローチャートである。尚、反応ディスク3が1サイクル毎に1周−1セル分回転し、第1試薬分注アーム6の吐出位置6bが試料分注アーム5の吐出位置5bの隣りにある場合を前提に説明するがこれに限られず、各種の態様で適用が可能である。
【0095】
まず、駆動制御部13bは、X+1番目のサイクルではスケジュールデータ17aのX番目のオーダー内容を特定し(S21)、そのオーダー内容が示す第1試薬とその分注量を吸引及び吐出させるべく第1試薬分注アーム6に対して分注のための駆動制御を開始する(S22)。
【0096】
この分注のための駆動制御の途中で、第2の蓋部112が開かれると(S23)、磁気センサ113dが第2の蓋部112の開きを検知し(S24)、駆動制御部13bとスケジュール作成部16に開きを示す信号が入力される(S25)。
【0097】
駆動制御部13bは、開きを示す信号が入力されると、試料分注アーム5と第1試薬分注アーム6とを低速で洗浄位置5c及び6cにそれぞれ移動させる(S26)。このとき、ディスクサンプラ4及び第1試薬の試薬ラック1bによる搬送も停止させる。さらに、スケジュール作成部16は、駆動制御部13bが特定していたX番目のオーダー内容以降をスケジュールデータ17aから削除する(S27)。
【0098】
図14は、第2の蓋部112の閉じを検知したときの自動分析装置100の動作を示すフローチャートである。この動作説明では、スケジュールデータ17aのX番目のオーダー内容に従って第1試薬を分注する際に第2の蓋部112が開かれ、その後第2の蓋部112が閉じられた場合を例に説明する。
【0099】
まず、第2の蓋部112が閉じられると(S31)、磁気センサ113dが第2の蓋部112の閉じを検知し(S32)、駆動制御部13bとスケジュール作成部16に閉じを示す信号が入力される(S33)。
【0100】
ディスクサンプラ4の駆動制御部13dと第1試薬の試薬ラック1bの駆動制御部13eは、閉じを示す信号が入力されると、ディスクサンプラ4の駆動を開始させる(S34)。ディスクサンプラ4の途中に設置されている読取り器42が被検試料を示す情報を読み取ると(S35)、スケジュール作成部16は、読み取られた被検試料を示す情報のオーダー情報15aをオーダー記憶部15から読み出し(S36)、読み出したオーダー情報15aのオーダー内容をスケジュールデータ17aのX番目に記録する(S37)。
【0101】
S35で読み取った被検試料を示す情報が貼着した試料容器41が吸引位置5aに搬送されてくると(S38)、駆動制御部13aは、スケジュールデータ17aのX番目のオーダー内容が示す分注量を吸引及び吐出させるべく試料分注アーム5の駆動制御を開始する(S39)。更に、駆動制御部13bは、S38で被検試料が分注された反応管31が吐出位置6bに搬送されてくると、スケジュールデータ17aのX番目のオーダー内容が示す第1試薬とその分注量を吸引及び吐出させるべく第1試薬分注アーム6の駆動制御を開始する(S40)。
【0102】
このように、この自動分析装置100は、カバーの開きを検知すると、アームを洗浄位置へ移動させるようにした。これにより、まず、カバーを開いた操作者がステージ110内に手を伸ばしてもアームは洗浄位置に待避しているため、この操作者に危害を与えるおそれを低減することができる。また、アームを洗浄位置に移動させているため、自動分析装置100の再開時には、このアームを直ちに吸引及び吐出の工程に移すことができ、アームを停止させる等により再開時には一度洗浄位置に移動して洗浄してから吸引及び吐出の工程に移る場合と比べ、迅速に分析工程に復帰させることができる。
【0103】
また、自動分析装置100には、試料分注アーム5、第1試薬分注アーム6、及び第2試薬分注アーム7等少なくとも2以上が配され、その一部はカバーの開閉口の近傍に配されることが多く、この場合、カバーの開きが検知されると、この開閉口の近傍に配されるアームを洗浄位置5c,6c又は7cへ移動させ、他のアームの分注の制御は継続するようにした。
【0104】
例えば、カバーは、ステージ110の少なくとも一部をそれぞれ覆う開閉が可能な第1の蓋部111及び第2の蓋部112等の複数の蓋部であり、各蓋部の開閉をそれぞれ検知するようにし、蓋部とその蓋部が覆う位置の近傍に配されたアームとをそれぞれ予め対応付けしておくようにし、蓋部の何れかの開きが検知されると、その開きが検知された蓋部に対応するアームを洗浄位置へ移動させるようにした。
【0105】
このように、危害を与えるおそれのあるアームのみを待避させるが、この待避させたアーム以外のユニットで分析工程を継続できる被検試料については分析を続行するため、安全性の確保とともに、分析の継続性を図ることができる。
【0106】
尚、本実施形態では、カバーは、第1の蓋部111と第2の蓋部112とからなり、それぞれの蓋部に対して洗浄位置に待避するアームが異なる例を説明したが、第1の蓋部111が開かれたときのみその開閉口の近傍に位置する試料分注アーム5を洗浄位置に待避させるようにし、第2の蓋部112が開かれたときには特別な待避動作を行わないようにしてもよい。また、第1の蓋部111が開かれたときには、全てのアームを洗浄位置に待避させるようにしてもよい。
【0107】
また、本実施形態では、第2の蓋部112が開かれると、被検試料の分注も停止される例を説明したが、被検試料の分注については継続するようにしてもよい。即ち、試料分注アーム5の分注のための駆動制御は継続してもよい。
【0108】
また、再開のときは、分注未完遂のオーダー情報15a、例えば読取り器42で再開後に読み取られた被検試料を示す情報に対するオーダー情報15aに基づいてスケジュールデータ17aを再作成して、その再作成したスケジュールデータ17aに従って分注を制御するようにすればよい。
【0109】
尚、カバーの開閉を検知するセンサとしては、磁気センサ113b,113dの他、近接センサ等の公知の各種のセンサを用いることができる。
【符号の説明】
【0110】
1 試薬庫
1a 試薬容器
1b 試薬ラック
3 反応ディスク
31 反応管
4 ディスクサンプラ
41 試料容器
42 読取り器
5 試料分注アーム
5a 吸引位置
5b 吐出位置
5c 洗浄位置
6 第1試薬分注アーム
6a 吸引位置
6b 吐出位置
6c 洗浄位置
7 第2試薬分注アーム
7a 吸引位置
7b 吐出位置
7c 洗浄位置
8 撹拌ユニット
9 測光ユニット
10 洗浄ユニット
11 制御部
12a,12b,12c,12d,12e,12f 駆動装置
13a,13b,13c,13d,13e,13f 駆動制御部
14 操作部
15 オーダー記憶部
15a オーダー情報
16 スケジュール作成部
17 スケジュール記憶部
17a スケジュールデータ
18 状況データ作成部
19 状況データ記憶部
20 スピーカ
21 データ処理部
22 モニタ
100 自動分析装置
110 ステージ
111 第1の蓋部
112 第2の蓋部
113a 磁性体
113b 磁気センサ
113c 磁性体
113d 磁気センサ
【特許請求の範囲】
【請求項1】
ステージ上で被検試料と試薬とを反応管に分注して混合液を測定し、その測定結果を表示手段に出力する自動分析装置であって、
プローブを有し、前記ステージ上で、該プローブの洗浄位置、前記被検試料又は前記試薬の吸引位置、及び前記被検試料又は前記試薬の吐出位置にこの順で移動を繰り返す分注駆動をすることにより、前記反応管に前記被検試料又は前記試薬を分注するアームと、
前記ステージの少なくとも一部を覆い、開閉が可能なカバーと、
前記カバーの開閉を検知するセンサと、
前記アームの分注駆動を制御するとともに、前記センサにより前記カバーの開きが検知されると、前記アームの前記分注駆動を停止させて前記洗浄位置へ移動させる制御手段と、
を備えること、
を特徴とする自動分析装置。
【請求項2】
前記制御手段は、
前記センサにより前記カバーの開きが検知されると、前記アームを前記分注の制御による移動よりも低速で前記洗浄位置へ移動させること、
を特徴とする請求項1記載の自動分析装置。
【請求項3】
前記アームは、少なくとも2以上が配されるとともに、その一部のアームは前記カバーの開閉口の近傍に配され、
前記制御手段は、
前記カバーの開きが検知されると、前記一部のアームの前記分注駆動を停止させて前記洗浄位置へ移動させるとともに、他のアームの前記分注駆動の制御を継続すること、
を特徴とする請求項1又は2記載の自動分析装置。
【請求項4】
前記カバーは、ステージの少なくとも一部をそれぞれ覆う開閉が可能な複数の蓋部であり、
前記センサは、前記各蓋部の開閉をそれぞれ検知し、
前記アームは、少なくとも2以上が配され、
前記制御手段は、
前記各蓋部とその蓋部が覆う位置の近傍に配された前記各アームとを予め対応付けするとともに、前記蓋部の何れかの開きが検知されると、その開きが検知された前記蓋部に対応する前記アームの前記分注駆動を停止させて前記洗浄位置へ移動させること、
を特徴とする請求項1乃至3の何れかに記載の自動分析装置。
【請求項5】
前記センサが前記カバーの開きを検知すると、前記カバーの開きを報知する報知手段を更に備えること、
を特徴とする請求項1乃至4の何れかに記載の自動分析装置。
【請求項6】
前記報知手段は、ブザーを出力するスピーカであること、
を特徴とする請求項5記載の自動分析装置。
【請求項7】
前記表示手段は、前記センサが前記カバーの開きを検知したときに前記分注の途中であった前記被検試料に対する前記測定結果を出力しないこと、
を特徴とする請求項1乃至6の何れかに記載の自動分析装置。
【請求項8】
前記制御手段は、
前記センサが前記カバーの閉じを検知すると、前記洗浄位置へ移動させていた前記アームに対する前記分注駆動の制御を再開すること、
を特徴とする請求項1乃至7の何れかに記載の自動分析装置。
【請求項9】
前記制御手段は、
前記被検試料に対するオーダー内容を搬送順に記録したスケジュールデータを作成する作成手段と、
当該スケジュールデータから参照するオーダー内容を特定して、そのオーダー内容に従って前記分注駆動を制御する駆動制御手段と、
を有し、
前記作成手段は、
前記カバーの開きが検知されると、前記特定したオーダー内容以下を前記スケジュールデータから削除するとともに、前記カバーの閉じが検知されると、新たに搬送されてきた前記被検試料に対するオーダー内容を削除部分から記録し直すことで前記スケジュールデータを再作成し、
前記駆動制御手段は、前記カバーの閉じが検知されると、その再作成されたスケジュールデータに従って前記分注駆動を制御すること、
を特徴とする請求項1乃至8の何れかに記載の自動分析装置。
【請求項1】
ステージ上で被検試料と試薬とを反応管に分注して混合液を測定し、その測定結果を表示手段に出力する自動分析装置であって、
プローブを有し、前記ステージ上で、該プローブの洗浄位置、前記被検試料又は前記試薬の吸引位置、及び前記被検試料又は前記試薬の吐出位置にこの順で移動を繰り返す分注駆動をすることにより、前記反応管に前記被検試料又は前記試薬を分注するアームと、
前記ステージの少なくとも一部を覆い、開閉が可能なカバーと、
前記カバーの開閉を検知するセンサと、
前記アームの分注駆動を制御するとともに、前記センサにより前記カバーの開きが検知されると、前記アームの前記分注駆動を停止させて前記洗浄位置へ移動させる制御手段と、
を備えること、
を特徴とする自動分析装置。
【請求項2】
前記制御手段は、
前記センサにより前記カバーの開きが検知されると、前記アームを前記分注の制御による移動よりも低速で前記洗浄位置へ移動させること、
を特徴とする請求項1記載の自動分析装置。
【請求項3】
前記アームは、少なくとも2以上が配されるとともに、その一部のアームは前記カバーの開閉口の近傍に配され、
前記制御手段は、
前記カバーの開きが検知されると、前記一部のアームの前記分注駆動を停止させて前記洗浄位置へ移動させるとともに、他のアームの前記分注駆動の制御を継続すること、
を特徴とする請求項1又は2記載の自動分析装置。
【請求項4】
前記カバーは、ステージの少なくとも一部をそれぞれ覆う開閉が可能な複数の蓋部であり、
前記センサは、前記各蓋部の開閉をそれぞれ検知し、
前記アームは、少なくとも2以上が配され、
前記制御手段は、
前記各蓋部とその蓋部が覆う位置の近傍に配された前記各アームとを予め対応付けするとともに、前記蓋部の何れかの開きが検知されると、その開きが検知された前記蓋部に対応する前記アームの前記分注駆動を停止させて前記洗浄位置へ移動させること、
を特徴とする請求項1乃至3の何れかに記載の自動分析装置。
【請求項5】
前記センサが前記カバーの開きを検知すると、前記カバーの開きを報知する報知手段を更に備えること、
を特徴とする請求項1乃至4の何れかに記載の自動分析装置。
【請求項6】
前記報知手段は、ブザーを出力するスピーカであること、
を特徴とする請求項5記載の自動分析装置。
【請求項7】
前記表示手段は、前記センサが前記カバーの開きを検知したときに前記分注の途中であった前記被検試料に対する前記測定結果を出力しないこと、
を特徴とする請求項1乃至6の何れかに記載の自動分析装置。
【請求項8】
前記制御手段は、
前記センサが前記カバーの閉じを検知すると、前記洗浄位置へ移動させていた前記アームに対する前記分注駆動の制御を再開すること、
を特徴とする請求項1乃至7の何れかに記載の自動分析装置。
【請求項9】
前記制御手段は、
前記被検試料に対するオーダー内容を搬送順に記録したスケジュールデータを作成する作成手段と、
当該スケジュールデータから参照するオーダー内容を特定して、そのオーダー内容に従って前記分注駆動を制御する駆動制御手段と、
を有し、
前記作成手段は、
前記カバーの開きが検知されると、前記特定したオーダー内容以下を前記スケジュールデータから削除するとともに、前記カバーの閉じが検知されると、新たに搬送されてきた前記被検試料に対するオーダー内容を削除部分から記録し直すことで前記スケジュールデータを再作成し、
前記駆動制御手段は、前記カバーの閉じが検知されると、その再作成されたスケジュールデータに従って前記分注駆動を制御すること、
を特徴とする請求項1乃至8の何れかに記載の自動分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9A】
【図9B】

【図9C】
【図9D】
【図9E】
【図9F】
【図9G】
【図9H】

【図10】
【図11】
【図12】
【図13】

【図14】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9A】
【図9B】
【図9C】
【図9D】
【図9E】
【図9F】
【図9G】
【図9H】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−216889(P2010−216889A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2009−61884(P2009−61884)
【出願日】平成21年3月13日(2009.3.13)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成21年3月13日(2009.3.13)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]