
自動分析装置
【課題】通常の洗浄水洗浄でプローブを十分に洗浄することが可能となり、また、測定項目の順序を自由に設定することが可能な自動分析装置を提供する。
【解決手段】吸引位置に移動した第1容器中の試薬又は試料を、吐出位置に移動した第2容器に分注し、該分注された試料の成分を分析する自動分析装置において、前記吸引位置と前記吐出位置との間を往復移動するホルダー部材と、長尺状にそれぞれが形成され、長手方向を上下方向にして水平面上の各位置に配置され、昇降可能に前記ホルダー部材に支持された複数のプローブと、前記各プローブの配置位置に選択的に前記水平面上を移動するように前記ホルダー部材に支持され、前記選択された配置位置に移動した場合、該配置位置にある前記プローブに当接することにより、該プローブに対し下降方向の力を与えるカム部材と、を有する。
【解決手段】吸引位置に移動した第1容器中の試薬又は試料を、吐出位置に移動した第2容器に分注し、該分注された試料の成分を分析する自動分析装置において、前記吸引位置と前記吐出位置との間を往復移動するホルダー部材と、長尺状にそれぞれが形成され、長手方向を上下方向にして水平面上の各位置に配置され、昇降可能に前記ホルダー部材に支持された複数のプローブと、前記各プローブの配置位置に選択的に前記水平面上を移動するように前記ホルダー部材に支持され、前記選択された配置位置に移動した場合、該配置位置にある前記プローブに当接することにより、該プローブに対し下降方向の力を与えるカム部材と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、自動分析装置に関し、特に、第1位置に移動した第1容器中の試薬又は試料を、第2位置に移動した第2容器に分注し、該分注された試料の成分を分析する自動分析装置に関する。
【背景技術】
【0002】
例えば、自動分析装置は、ヒトの血液や尿などの試料を試薬と混合させ、混合液の反応によって生ずる色調などの変化を、光の透過量を測定することにより、試料中の様々な成分の濃度や酵素の活性を測定する。
【0003】
この自動分析装置では、試料毎に分析条件の設定により測定可能になった多数の項目の中から、検査に応じて選択された項目の測定が行われる。そして、試料は、サンプル分注プローブによりサンプラに収納された試料容器から反応容器に分注され、試薬は、試薬分注プローブにより試薬庫に収納された試薬容器から反応容器に分注される。反応容器に分注された試料及び試薬の混合液は攪拌された後、測光部により測定される。サンプル分注プローブは、試料の分注終了毎に洗浄水で洗浄され、試薬分注プローブは試薬分注終了毎に洗浄水で洗浄される(通常の洗浄水洗浄)。
【0004】
しかしながら、通常の洗浄水洗浄だけでは以前に分注した試料がサンプル分注プローブを介して次の試料に持ち越されると、次の試料に免疫学的検査など微量成分の測定項目が含まれている場合、試料間のキャリーオーバーによりその測定項目の分析データが悪化してしまう問題がある。また、洗浄水洗浄だけでは以前に分注した試薬が試薬分注プローブを介して次に分注する試薬に持ち越されると、試薬間のキャリーオーバーにより以前の試薬と反応して次の試薬に該当する測定項目の分析データが悪化してしまう試薬干渉の問題がある。
【0005】
キャリーオーバーの発生を防止するために、従来の技術(例えば、特許文献1)としては、影響を受ける測定項目の試薬をダミーで空き反応管に吐出して試薬分注プローブの内壁をなじませる特別な洗浄工程、また、洗剤を試薬分注プローブに吸引して空き反応管に吐出する特別な洗浄工程がある。さらに、前の測定項目の試薬の影響が出ないように測定項目の順序を切り換える方法がある。
【0006】
また、従来の技術(例えば、特許文献2)としては、高温加熱装置を設け、サンプル及び試薬分注プローブを洗浄する特別な洗浄工程がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−305145号公報
【特許文献2】特開2007−47027号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記特許文献1に記載された自動分析装置では、通常の洗浄水洗浄とは、別にプローブを洗浄するための特別な洗浄工程や洗浄装置が必要となる。また、測定項目の順序を自由に設定することができない場合があるという問題点があった。また、上記特許文献2に記載された自動分析装置でも、通常の洗浄水洗浄とは、別にプローブを洗浄するための特別な洗浄工程が必要となる。
【0009】
この発明は、上記の問題を解決するものであり、測定精度の向上を図ることが可能な自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するため、この発明は、試薬又は試料を分注する場合に複数のプローブを選択的に使用し、洗浄水洗浄では、複数のプローブを一括して洗浄することに着目した。
この発明の第1の形態は、吸引位置に移動した第1容器中の試薬又は試料を、吐出位置に移動した第2容器に分注し、該分注された試料の成分を分析する自動分析装置において、前記吸引位置と前記吐出位置との間を往復移動するホルダー部材と、長尺状にそれぞれが形成され、長手方向を上下方向にして水平面上の各位置に配置され、昇降可能に前記ホルダー部材に支持された複数のプローブと、前記各プローブの配置位置に選択的に前記水平面上を移動するように前記ホルダー部材に支持され、前記選択された配置位置に移動した場合、該配置位置にある前記プローブに当接することにより、該プローブに対し下降方向の力を与えるカム部材と、を有することを特徴とする自動分析装置である。
【発明の効果】
【0011】
この発明によると、自動分析装置の測定精度の向上を図ることが可能となる。
【0012】
また、この発明の第1の形態によると、例えば、試薬干渉が発生し易い試薬又は試料を分注する場合、複数のプローブを選択的に使用し、また、通常の洗浄水洗浄では複数のプローブを一括して洗浄し、試薬又は試料を分注したか否かに関わらず、各プローブが繰り返し洗浄されることにより、通常の洗浄水洗浄でプローブを十分に洗浄することが可能となり、また、測定項目の順序を自由に設定することが可能となる。
【図面の簡単な説明】
【0013】
【図1】この発明の第1実施形態に係る自動分析装置の要部を示す斜視図である。
【図2】自動分析装置の機能ブロック図である。
【図3】上下方向に破断して示すホルダー部材と、ホルダー部材の内部機構の正面図である。
【図4】試薬プローブの配置位置以外の位置に移動させたカム部材の正面図である。
【図5】(a)は、試薬プローブの配置位置に移動させた傾斜部を破線で示す平面図、(b)は、試薬プローブの配置位置以外の位置に移動させた傾斜部を破線で示す平面図である。
【図6】(a)斜め上方から見たカム部材の斜視図、(b)斜め下方から見たカム部材の斜視図である。
【図7】試薬プローブ等の側面図である。
【図8】この発明の第2実施形態に係る自動分析装置の動作を概念的に示す図である。
【図9】この発明の第3実施形態に係る自動分析装置の動作を概念的に示す図である。
【発明を実施するための形態】
【0014】
[第1実施形態]
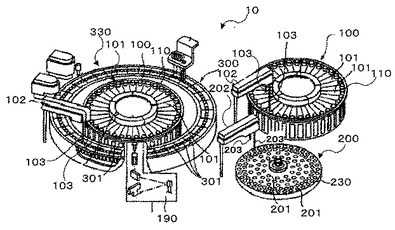
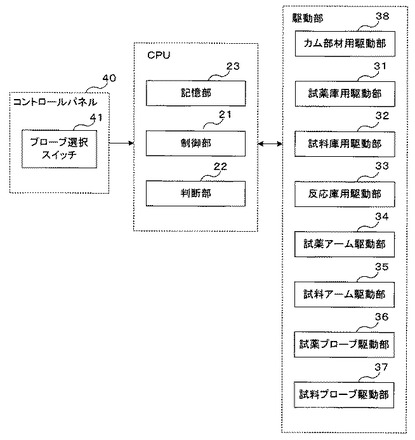
この発明の第1実施形態に係る自動分析装置の構成について図1から図7を参照して説明する。図1は、自動分析装置の要部を示す斜視図、図2は、自動分析装置の機能ブロック図である。
【0015】
先ず、自動分析装置の基本的な構成について図1及び図2を参照して説明する。自動分析装置10は、第1及び第2の試薬庫100、試薬庫ケース110、試薬を収容する試薬容器101、試薬アーム102、試薬プローブ103、試料庫200、試料(生体サンプル)を収容する試料容器201、試料アーム202、試料プローブ203、反応庫300、反応容器301、その他の構成部品を有する。
【0016】
第1及び第2の各試薬庫100は基本的に同じ構成をしている。以下に、第1の試薬庫100について主に説明し、第2の試薬庫100については、第1の試薬庫100と重複する説明を省略する。試薬庫100は、試薬容器101を円周方向に並べた状態で載置し、試薬容器101を円周方向に回転させることにより、複数の試薬容器101を順番に吸引位置に搬送するステッピングモータを含む試薬庫用駆動部31を有する。試薬容器101には、試料に含まれる特定成分に対して選択的に反応する試薬が収容されている。
【0017】
第2の試薬庫100の試薬容器101には、前記第1の試薬庫100の試薬容器101に収容されている試薬と対をなす試薬が収容されている。
【0018】
試料庫200は、複数の試料容器201を円周方向に並べた状態で載置するディスクサンプラである試料ラック230と、試料ラック230を円周方向に回転させることにより、複数の試料容器201を順番に吸引位置に搬送するステッピングモータを含む試料庫用駆動部32とを有する。
【0019】
反応庫300は、複数の反応容器301を円周方向に並べた状態で載置する反応ライン330と、反応ライン330を円周方向に回転させることにより、複数の反応容器301を順番に吐出位置及び吐出位置に搬送するステッピングモータを含む反応庫用駆動部33とを有する。
【0020】
試薬アーム102の先端部には試薬プローブ103が設けられている。試薬アーム102を吸引位置と吐出位置との間で移動させるための電動モータを含む試薬アーム駆動部34が設けられている。
【0021】
試料アーム202の先端部には試料プローブ203が設けられている。試料アーム202を吸引位置と吐出位置との間で移動させるための電動モータを含む試料アーム駆動部35が設けられている。
【0022】
次に、自動分析装置の基本的な動作について、図1及び図2を参照して説明する。
試薬プローブ103を下降及び上昇させる試薬プローブ駆動部36と、試薬プローブ103により、試薬を吸引及び吐出させるためのポンプ(図示省略)と、電磁弁(図示省略)と、電磁弁を駆動させるアクチュエータ(図示省略)とを有する試薬吸排部が設けられている。試薬プローブ103が待機位置から吸引位置に移動すると、試薬プローブ駆動部36が試薬プローブ103を下降させる。電磁弁が作動して、試薬プローブ103により所定の試薬容器101から試薬を吸引させる。
【0023】
次に、電磁弁が作動し、試薬プローブ駆動部36が試薬プローブ103を上昇させる。試薬プローブ103が吸引位置から吐出位置に移動すると、試薬プローブ駆動部36が試薬プローブ103を下降させる。電磁弁が作動して、試薬プローブ103により所定の反応容器301に試料を吐出させる。次に、電磁弁が作動し閉じ、試薬プローブ駆動部36が試薬プローブ103を上昇させる。試薬プローブ103が吐出位置から待機位置に移動する。
【0024】
試料プローブ203を下降及び上昇させる試料プローブ駆動部37と、試料プローブ203により、試料を吸引及び吐出させるためのポンプ(図示省略)と、電磁弁(図示省略)と、電磁弁を駆動させるアクチュエータとを有する試料吸排部が設けられている。試料プローブ203が待機位置から吸引位置に移動すると、試料プローブ駆動部37が試料プローブ203を下降させる。電磁弁が作動して、試料プローブ203により所定の試料容器201から試料を吸引させる。
【0025】
次に、電磁弁が作動し、試料プローブ駆動部37が試料プローブ203を上昇させる。試料プローブ203が吸引位置から吐出位置に移動すると、試料プローブ駆動部37が試料プローブ203を下降させる。電磁弁が作動して、試料プローブ203により所定の反応容器301に試料を吐出させる。次に、電磁弁が作動し閉じ、試料プローブ駆動部37が試料プローブ203を上昇させる。試料プローブ203が吐出位置から待機位置に移動する。
【0026】
以上のように、試料及び試薬が分注された反応容器301を、反応庫用駆動部33によって、測光ユニット190の方へ移動させる。それまでの間、反応容器301内の試料及び試薬は攪拌子(図示省略)によって攪拌される。測光ユニット190は、攪拌後の反応容器301に光を照射して、透過した光から設定波長における吸光度を測定する。
【0027】
以上、第1実施形態に係る自動分析装置の基本的な構成及び動作について説明した。この自動分析装置は、更に次の構成を有している。
【0028】
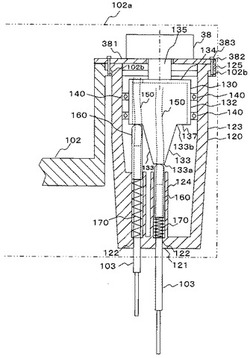
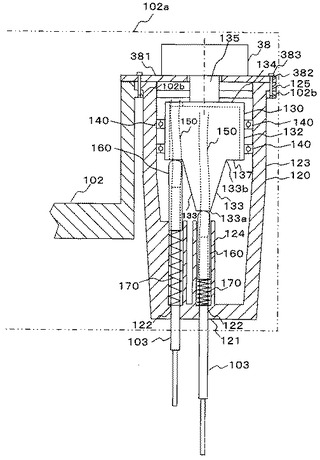
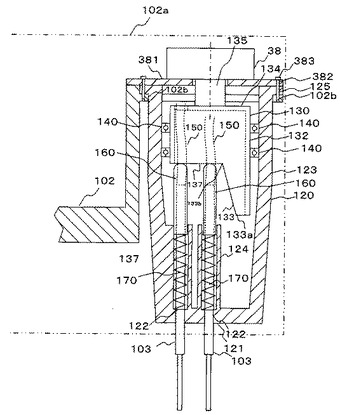
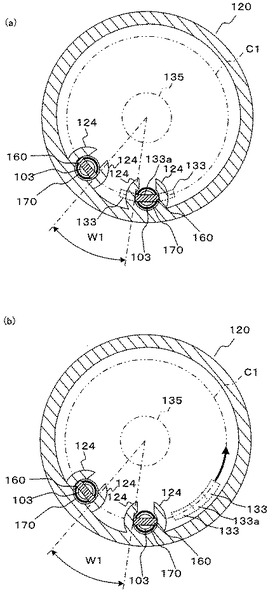
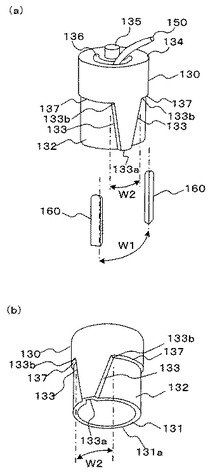
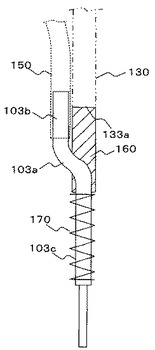
次に、この自動分析装置の更なる構成について、図3から図7を参照に説明する。図3は上下方向に破断して示すホルダー部材と、ホルダー部材の内部機構の正面図、図4は試薬プローブの配置位置以外の位置に移動させたカム部材の正面図、図5は(a)は、試薬プローブの配置位置に移動させた傾斜部を破線で示す平面図、(b)は、試薬プローブの配置位置以外の位置に移動させた傾斜部を破線で示す平面図、図6(a)は斜め上方から見たカム部材の斜視図、(b)は斜め下方から見たカム部材の斜視図、図7は試薬プローブ等の側面図である。
【0029】
以下、試薬庫100の構成を代表して説明し、試料庫200の構成については、試薬庫100と同じ構成をしているため、その説明を省略する。
【0030】
自動分析装置は、吸引位置と吐出位置との間を往復移動するホルダー部材120を有している。ホルダー部材120は、大径の筒形状に形成されている。試薬アーム102の先端部の下面側には、ホルダー部材120がその筒軸中心を上下方向にして設けられている。試薬アーム102の先端部の上面側には、電動モータであるカム部材用駆動部38が設けられている。ホルダー部材120及びカム部材用駆動部38は、共に、試薬アーム102のカバー102aの内部に設けられている。カバー102aを図4及び図5に二点鎖線でそれぞれ示す。
【0031】
ホルダー部材120の下端の筒底部121には、2つの案内孔122、122が設けられている。2本の試薬プローブ103が、2つの案内孔122に通されることにより、昇降可能にそれぞれ支持されている。2本の試薬プローブ103は、長手方向を上下方向にして水平面上の円周C1方向に所定間隔W1以上離間した位置に配されている。円周C1を図5(a)、(b)に二点鎖線で示す。
【0032】
ホルダー部材120には、小径の筒形状に形成されたカム部材130が嵌め込まれている。カム部材130は、ホルダー部材120の筒壁部123に軸受け部材140を介して筒軸中心に回転可能に支持されている。大径のホルダー部材120の内部空間をカム部材130の取付スペースに有効に利用することが可能となる。カム部材130は、2本の試薬プローブ103の各配置位置に選択的に水平面上を移動し、選択された配置位置に移動した場合、配置位置にある試薬プローブ103に当接することにより、試薬プローブ103に対し下降方向の力を与える。
【0033】
カム部材130は、下方向に開いた筒口131を有している。カム部材130の筒壁部132は、試薬プローブ103を配置した前記円周C1に対応させるように形成されている。筒壁部132は円周C1方向に対して斜め下方向に傾斜する第1の傾斜部133、最も低い位置で平坦な底部133a、及び、斜め上方に立ち上がる第2の傾斜部133を有している。第1及び第2の傾斜部133は、底部133aを中心として、左右対称に形成されている。底部133aは、円周1に沿うように所定の長さを有していて、所定の長さの範囲内では、試薬プローブ103を下降位置に保持する。第1及び第2の傾斜部133は、所定間隔W1より狭い範囲W2内に設けられている。所定間隔W1より狭い範囲W2内に第1及び第2の傾斜部133を設けることにより、所定間隔W1以上離間した2本の試薬プローブ103は、第1及び第2の傾斜部133による下降方向の力を同時に受けることはない。第1及び第2の傾斜部133並びに底部133aを図5(a)、(b)に点線で示す。また、所定間隔W1より狭い範囲W2を図6(a)に示す。
【0034】
カム部材130の第1及び第2の傾斜部133は、試薬プローブ103の昇降量に相当する高さを有している。第1及び第2の傾斜部133は、底部133aを中心として、左右対称に形成されている。左右対称に形成された第1及び第2の傾斜部133により、カム部材130の正転又は逆転のいずれの方向であっても、試薬プローブ103に対し、下降方向の力を与えることが可能となる。また、カム部材130を正転又は逆転させることにより、2本の試薬プローブ103を交互に昇降させることが可能となる。
【0035】
カム部材130の第1及び第2の傾斜部133は、その筒壁部132を所定量だけ内側へ凹ませることにより形成されている。また、底部133aは、筒口131の周縁部131aの一部に形成されている。なお、第1及び第2の傾斜部133も筒口131の周縁部131aの一部に形成しても良いが、筒壁部132を凹ませることにより形成された第1及び第2の傾斜部133の方が、試薬プローブ103を安定して移動させることができる。
【0036】
カム部材130の筒壁部132は、水平面上の円周C1方向に沿うように形成された水平部137を有している。水平部137は、第1及び第2の傾斜部133の最も高い位置133bと同じ高さを有している。水平部137においても、筒口131の周縁部131aの一部に形成しても良いが、筒壁部132を凹ませることにより形成された水平部137の方が、試薬プローブ103を安定して移動させることができる。
【0037】
カム部材130の上端である天井部134には、筒軸中心の回転軸135が設けられている。回転軸135は、カム部材用駆動部38の出力軸に連結されている。また、カム部材130の天井部134には、カム部材130の外部に連通する貫通孔136が設けられている。
【0038】
試薬プローブ103は、長手方向の中間部103aがS字状に形成されている。長手方向を上下方向にして配され、その長手方向の中間部103aが略S字状に形成された試薬プローブ103を図7に示す。
【0039】
中間部103aより上側である試薬プローブ103の上部103bは、カム部材130の筒壁部132の内壁面の位置より径方向で内側に配されている。試薬プローブ103の上端部には、可撓性を有するチューブ150が連結されている。試薬プローブ103の上部103b及びチューブ150は、カム部材130の内壁面に沿って上方に延びるように形成されている。
【0040】
中間部103aより下側である試薬プローブ103の下部103cは、カム部材130の筒壁部132の位置より径方向で外側に配され、ホルダー部材120の内壁面に沿って下方向に延びるように形成されている。
【0041】
試薬プローブ103の中間部103aは被当接部材160が設けられている。被当接部材160は、細長板状に形成され、中間部103aに上方から嵌め込まれている。中間部103aがS字状に形成されているため、細長板状の被当接部材160を嵌め込み易くなっている。被当接部材160は、前記水平面上の円周C1に沿った位置に配置され、第1及び第2の傾斜部133、底部133a、及び、水平部137に当接可能になっている。また、本実施形態では、被当接部材160を上下方向に案内するためのリブ状の案内溝124が、ホルダー部材120の筒壁部123に沿うように形成されている。案内溝124が被当接部材160を上下方向に案内することにより、被当接部材160を介して試薬プローブ103をより安定的に支持する。また、被当接部材160の上端部は、第1及び第2の傾斜部133に沿って滑らせ易くするために、丸みを帯びている。被当接部材160を図5(a)、(b)においてハッチングを施して示す。
【0042】
試薬プローブ103は、被当接部材160を介して、第1及び第2の傾斜部133からの下降方向の力を間接的に受ける。なお、被当接部材160等を介さずに、直接的に受けるようにしも良いが、間接的に受けた方が、試薬プローブ103の強度を必要以上に高くせずに済む。
【0043】
試薬プローブ103は、コイル状のばね部材170により、上方向の付勢力を受けている。ばね部材170は、案内孔122の周縁部と被当接部材160との間に圧縮された状態で、試薬プローブ103の下部103cに嵌められている。案内溝124の中にばね部材170は嵌り、さらに、そのばね部材170の中に試薬プローブ103の下部103cが嵌ることにより、試薬プローブ103を安定的に支持する。
【0044】
試薬プローブ103の上端部に連結されたチューブ150は、カム部材130の貫通孔136を通って、カム部材130の外部に延ばされ、さらに、ホルダー部材120の外部に延ばされている。貫通孔136は、回転軸135中心の円弧形状に形成されている。
【0045】
次に、自動分析装置の一連の動作について説明する。なお、以下の説明においては、試薬分注を代表して説明し、試料(サンプル)分注の説明を省略する。
【0046】
吸引位置に移動した試薬容器101中の試薬を、吐出位置に移動した反応容器301に分注する場合において、試薬アーム102を回動させて、ホルダー部材120を吸引位置と吐出位置との間に移動させる。移動中においては、試薬プローブ103を上昇位置に保持する。このとき、カム部材130の水平部137が、被当接部材160に当接している。
【0047】
ホルダー部材120を吸引位置又は吐出位置に移動させた場合、カム部材用駆動部38によりカム部材130を回転させる。それにより、カム部材130の第1の傾斜部133が、被当接部材160に当接し、被当接部材160が斜め下方向の第1の傾斜部133に沿って、最も高い位置133bから最も低い位置の底部133aの方へ相対的に滑るようになる。それにより、試薬プローブ103が下降方向の力を受けて、ばね部材170の付勢力に抗して下降する。カム部材130の底部133aに当接させた被当接部材160を図3及び図5(a)に示す。このとき、試薬プローブ103は、最も下がった位置に下降する。下降させた試薬プローブ103により、試薬容器101中の試薬を吸引し、又は、反応容器301に試薬を吐出することが可能となる。
【0048】
試薬プローブ103による試薬の吸引又は突出を終了した場合、カム部材用駆動部38によりカム部材130を図5(a)で時計方向に回転させる。それにより、被当接部材160が、斜め上方向の第2の傾斜部133に沿って最も低い位置の底部133aから最も高い位置133bの方へ相対的に滑るようになる。それにより、試薬プローブ103がばね部材170の付勢力で上昇する。試薬プローブ103を上昇位置に保持させることができる。カム部材130の第1及び第2の傾斜部133から離れ、水平部137に当接した被当接部材160を図4及び図5(b)に示す。それにより、2本の試薬プローブ103を上昇位置に保持させることができる。試薬アーム102を回動させて、ホルダー部材120を吸引位置と吐出位置との間に移動させることができる。また、ホルダー部材120を洗浄位置に移動させることができる。
【0049】
次に、試薬プローブ103の洗浄について説明する。洗浄は、2本の試薬プローブ103を共に上昇位置に保持させた図4に示す状態で行う。試薬の分注に使用した試薬プローブ103であるか否かに関係なく、2本の試薬プローブ103が共に洗浄される。それにより、通常の洗浄水洗浄で試薬プローブ103を十分に洗浄することが可能となる。
【0050】
上記自動分析装置は、プログラムを基に一連の動作を行う。制御部21は、プログラムに基づく、試薬プローブ103の選択を受けて、試薬プローブ103に対応する位置情報を記憶部23から読み出し、位置情報を基に制御情報(モータであるカム部材用駆動部38の回転量に相当するパルス数)を作成し、カム部材用駆動部38に出力する。判断部22は、カム部材用駆動部38からカム部材130の位置情報を受け、前記選択された試薬プローブ103の位置情報と、カム部材130の位置情報とが対応するか否かを判断する。制御部21は、両方の位置情報が対応したとの判断部22からの判断を受けて、カム部材130の現在の位置情報を記憶部23に書き込む。一方で、制御部21は、所定時間を経過した場合でも、両方の位置情報が対応しないとの判断部22からの判断を受けて、エラー情報を表示制御部(図示省略)に出力する。表示制御部は、モニター(図示省略)にエラー情報を表示させる。
【0051】
また、制御部21は、コントロールパネル40に設けられたプローブ選択スイッチ41の操作を受けて、選択された試薬プローブ103に対応する動作情報を記憶部23から読み出し、カム部材用駆動部38に出力する。以上により、試薬プローブ103を選択的に下降位置に保持し、試薬分注に使用することが可能となる。このように構成したことにより、試薬干渉が発生し易い試薬を分注する場合であっても、試薬プローブ103を選択的に使用し、試薬干渉が発生しないように測定項目の順序を変更する必要がなく、測定項目の順序を自由に設定することが可能となる。なお、この試薬分注と同様に、試料分注においても、複数の試料プローブ203を備え、試料プローブ203を選択的に使用可能に構成することにより、試料干渉が発生し易い試料を分注する場合であっても、測定項目の順序を自由に設定することが可能となる。
【0052】
次に、試薬アーム102に、試薬プローブ103、モータであるカム部材用駆動部38、ホルダー部材120、及び、カム部材130等を組み付ける工程について説明する。
ホルダー部材120の案内孔122にばね部材170を嵌め込み、さらに、試薬プローブ103を嵌め込む。次に、ホルダー部材120に軸受け部材140を介して、カム部材130を嵌め込む。このとき、例えば、2本の試薬プローブ103の被当接部材160が共に水平部137に当たる図4に示す回転位置(初期位置)にカム部材130を位置合わせておく。これに限らず、カム部材130の位置合わせは、全ての組み付けが終了後、カム部材130を所定位置に回転させて、コントロールパネル40の操作を受けて、制御部21が、前記所定位置を初期位置として記憶部23に記憶させるようにしても良い。
【0053】
以上のようにして、ホルダー部材120内に、カム部材130等が予め組み付けられる。このホルダー部材120を、試薬アーム102の取付穴102bに嵌め込む。次に、取付プレート381を被せ、さらに、カム部材用駆動部38の出力軸をカム部材130の回転軸135と連結し、さらに、取付プレート381の下孔382、ホルダー部材120の下孔125、及び、試薬アーム102の下孔102cを合わせ、取付ボルト383を通して、取付プレート381、ホルダー部材120、及び、試薬アーム102を固定する。各下孔382、125、102cは、それぞれ回転軸135の円周方向に各所定間隔で多数設けられている。
【0054】
以上の構成によれば、各下孔382、125、102bを適宜合わせることにより、取付プレート381、ホルダー部材及び試薬アーム102の各1つの部材を他の2つの部材に対し相対的な回転位置を調整することが可能となる。例えば、試薬アーム102に対する試薬プローブ103の相対的な位置が調整可能となる。
【0055】
なお、前記第1実施形態では、2本の試薬プローブ103を備えたホルダー部材120を示したが、3本以上の試薬プローブ103を備えるようにしても良い。
【0056】
また、前記第1実施形態では、端面カムに類似したカム部材130を示したが、確動カムであっても良い。確動カムにすることにより、ばね部材170が不要となる。さらに、カム部材130を円周方向に移動させるものを示したが、直線方向に移動させるものであっても良い。
【0057】
さらに、カム部材130の第1及び第2の傾斜部133を底部133aを中心として対称的に形成したが、非対称に形成しても良い。例えば、第2の傾斜部133を上方向に垂直に立ち上がるように形成しても良い。この場合、カム部材130は、一方向に回転し、試薬プローブ103の被当接部材160を第1の傾斜部133から底部133aを相対的に移動させ、第2の傾斜部133で真上の水平部137に移動させるようになる。
【0058】
[第2実施形態]
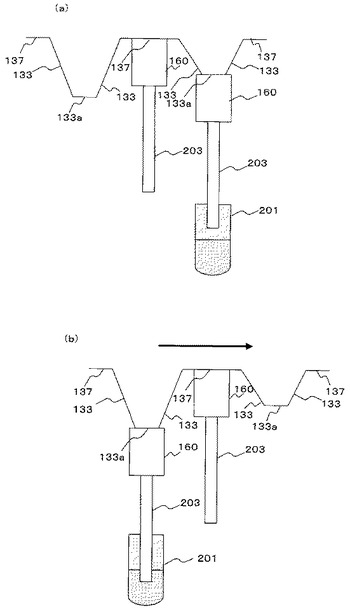
次に、本発明の第2実施形態に係る自動分析装置について図8を参照して説明する。図8は、自動分析装置の動作を概念的に示す図である。
【0059】
この第2実施形態では、試料の分注を代表して説明し、試薬の分注は試料の分注と同じであり、その説明を省略する。カム部材130の筒壁部132は、高さ位置が互いに異なる複数種類の底部133aを有している。なお、図8では、円周C1に沿って形成された第1及び第2の傾斜部133、及び、円周C1上の位置に配置された試料プローブ203を展開してそれぞれ示した。
【0060】
上記構成を有する自動分析装置の動作は、例えば、試料溶液201中の試料がその性質により、2層に分離するような場合、カム部材130を移動させ、底部133aの中で、比較的に高い方を被当接部材160に当接させて、試料プローブ203を所定位置まで下降させて、試料溶液201中の上層の試料を吸引する。前記高い方を当接させた被当接部材160を図8(a)に示す。
【0061】
上層の試料を吸引した後に、さらに、図8(a)において、カム部材130を右へ移動させ、高い方を被当接部材160から離間させる。一方で、底部133aの中で、比較的低い方を別の被当接部材160に当接させて、試料プローブ203を所定位置まで下降させて、試料溶液201中の下層の試料を吸引する。前記低い方を当接させた被当接部材160を図8(b)に示す。
【0062】
以上の通り、2本の試料プローブ203を各所定位置までそれぞれ下降させることにより、各層得の試料の吸引の間に、洗浄工程を設けることなく、連続的に2層の試料を吸引することが可能となる。
【0063】
なお、高さの異なる底部133aを3種類以上設けることにより、3以上の層に分離するような試料にも適用することが可能となる。
【0064】
前記実施形態では、複数のプローブのそれぞれを試薬プローブ103の専用として使用し、または、試料プローブ203の専用として使用したが、これに限らない。
【0065】
[第3の実施形態]
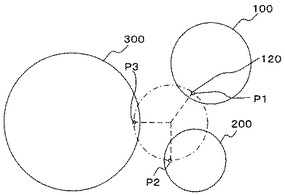
次に、本発明の第3実施形態に係る自動分析装置について図9を参照して説明する。図9は、自動分析装置の動作を概念的に示す図である。
【0066】
1つのホルダー部材120の中に複数のプローブを備え、複数のプローブの中の1以上を試薬プローブ103の専用として使用する一方で、他方のプローブを試料プローブ203の専用として使用しても良い。
【0067】
1つのホルダー部材120の円周状の移動軌跡であって、その軌跡上に、試薬の吸引位置P1、試料の吸引位置P2、及び、試薬又は試料の吐出位置P3を設けたものを図9に一点鎖線で示す。
【0068】
上記構成によれば、アーム及びホルダー部材120を統合することが可能となり、それにより、分注用機構の設置スペースを縮小することが可能となり、部品点数を削減することが可能となる。
【符号の説明】
【0069】
10 自動分析装置 21 制御部 22 判断部 23 記憶部
38 カム部材用駆動部 381 取付プレート 382 下孔
383 取付ボルト 40 コントロールパネル 41 プローブ選択スイッチ
100 試薬庫 101 試薬容器 102 試薬アーム
102a カバー 102b 取付穴 102c 下孔 103 試薬プローブ
110 試薬庫ケース 120 ホルダー部材 121 筒底部 122 案内孔
123 筒壁部 124 案内溝 125 下孔 130 カム部材
131 筒口 131a 周縁部 132 筒壁部 133 傾斜部
133a 底部 133b 最も高い位置 134 天井部
135 回転軸 136 貫通孔
137 水平部 140 軸受け部材 150 チューブ
160 被当接部材 170 ばね部材 190 測定ユニット
200 試料庫 201 試料容器 202 試料アーム
203 試料プローブ 230 試料ラック 300 反応庫
301 反応容器 330 反応ライン
【技術分野】
【0001】
この発明は、自動分析装置に関し、特に、第1位置に移動した第1容器中の試薬又は試料を、第2位置に移動した第2容器に分注し、該分注された試料の成分を分析する自動分析装置に関する。
【背景技術】
【0002】
例えば、自動分析装置は、ヒトの血液や尿などの試料を試薬と混合させ、混合液の反応によって生ずる色調などの変化を、光の透過量を測定することにより、試料中の様々な成分の濃度や酵素の活性を測定する。
【0003】
この自動分析装置では、試料毎に分析条件の設定により測定可能になった多数の項目の中から、検査に応じて選択された項目の測定が行われる。そして、試料は、サンプル分注プローブによりサンプラに収納された試料容器から反応容器に分注され、試薬は、試薬分注プローブにより試薬庫に収納された試薬容器から反応容器に分注される。反応容器に分注された試料及び試薬の混合液は攪拌された後、測光部により測定される。サンプル分注プローブは、試料の分注終了毎に洗浄水で洗浄され、試薬分注プローブは試薬分注終了毎に洗浄水で洗浄される(通常の洗浄水洗浄)。
【0004】
しかしながら、通常の洗浄水洗浄だけでは以前に分注した試料がサンプル分注プローブを介して次の試料に持ち越されると、次の試料に免疫学的検査など微量成分の測定項目が含まれている場合、試料間のキャリーオーバーによりその測定項目の分析データが悪化してしまう問題がある。また、洗浄水洗浄だけでは以前に分注した試薬が試薬分注プローブを介して次に分注する試薬に持ち越されると、試薬間のキャリーオーバーにより以前の試薬と反応して次の試薬に該当する測定項目の分析データが悪化してしまう試薬干渉の問題がある。
【0005】
キャリーオーバーの発生を防止するために、従来の技術(例えば、特許文献1)としては、影響を受ける測定項目の試薬をダミーで空き反応管に吐出して試薬分注プローブの内壁をなじませる特別な洗浄工程、また、洗剤を試薬分注プローブに吸引して空き反応管に吐出する特別な洗浄工程がある。さらに、前の測定項目の試薬の影響が出ないように測定項目の順序を切り換える方法がある。
【0006】
また、従来の技術(例えば、特許文献2)としては、高温加熱装置を設け、サンプル及び試薬分注プローブを洗浄する特別な洗浄工程がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−305145号公報
【特許文献2】特開2007−47027号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記特許文献1に記載された自動分析装置では、通常の洗浄水洗浄とは、別にプローブを洗浄するための特別な洗浄工程や洗浄装置が必要となる。また、測定項目の順序を自由に設定することができない場合があるという問題点があった。また、上記特許文献2に記載された自動分析装置でも、通常の洗浄水洗浄とは、別にプローブを洗浄するための特別な洗浄工程が必要となる。
【0009】
この発明は、上記の問題を解決するものであり、測定精度の向上を図ることが可能な自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するため、この発明は、試薬又は試料を分注する場合に複数のプローブを選択的に使用し、洗浄水洗浄では、複数のプローブを一括して洗浄することに着目した。
この発明の第1の形態は、吸引位置に移動した第1容器中の試薬又は試料を、吐出位置に移動した第2容器に分注し、該分注された試料の成分を分析する自動分析装置において、前記吸引位置と前記吐出位置との間を往復移動するホルダー部材と、長尺状にそれぞれが形成され、長手方向を上下方向にして水平面上の各位置に配置され、昇降可能に前記ホルダー部材に支持された複数のプローブと、前記各プローブの配置位置に選択的に前記水平面上を移動するように前記ホルダー部材に支持され、前記選択された配置位置に移動した場合、該配置位置にある前記プローブに当接することにより、該プローブに対し下降方向の力を与えるカム部材と、を有することを特徴とする自動分析装置である。
【発明の効果】
【0011】
この発明によると、自動分析装置の測定精度の向上を図ることが可能となる。
【0012】
また、この発明の第1の形態によると、例えば、試薬干渉が発生し易い試薬又は試料を分注する場合、複数のプローブを選択的に使用し、また、通常の洗浄水洗浄では複数のプローブを一括して洗浄し、試薬又は試料を分注したか否かに関わらず、各プローブが繰り返し洗浄されることにより、通常の洗浄水洗浄でプローブを十分に洗浄することが可能となり、また、測定項目の順序を自由に設定することが可能となる。
【図面の簡単な説明】
【0013】
【図1】この発明の第1実施形態に係る自動分析装置の要部を示す斜視図である。
【図2】自動分析装置の機能ブロック図である。
【図3】上下方向に破断して示すホルダー部材と、ホルダー部材の内部機構の正面図である。
【図4】試薬プローブの配置位置以外の位置に移動させたカム部材の正面図である。
【図5】(a)は、試薬プローブの配置位置に移動させた傾斜部を破線で示す平面図、(b)は、試薬プローブの配置位置以外の位置に移動させた傾斜部を破線で示す平面図である。
【図6】(a)斜め上方から見たカム部材の斜視図、(b)斜め下方から見たカム部材の斜視図である。
【図7】試薬プローブ等の側面図である。
【図8】この発明の第2実施形態に係る自動分析装置の動作を概念的に示す図である。
【図9】この発明の第3実施形態に係る自動分析装置の動作を概念的に示す図である。
【発明を実施するための形態】
【0014】
[第1実施形態]
この発明の第1実施形態に係る自動分析装置の構成について図1から図7を参照して説明する。図1は、自動分析装置の要部を示す斜視図、図2は、自動分析装置の機能ブロック図である。
【0015】
先ず、自動分析装置の基本的な構成について図1及び図2を参照して説明する。自動分析装置10は、第1及び第2の試薬庫100、試薬庫ケース110、試薬を収容する試薬容器101、試薬アーム102、試薬プローブ103、試料庫200、試料(生体サンプル)を収容する試料容器201、試料アーム202、試料プローブ203、反応庫300、反応容器301、その他の構成部品を有する。
【0016】
第1及び第2の各試薬庫100は基本的に同じ構成をしている。以下に、第1の試薬庫100について主に説明し、第2の試薬庫100については、第1の試薬庫100と重複する説明を省略する。試薬庫100は、試薬容器101を円周方向に並べた状態で載置し、試薬容器101を円周方向に回転させることにより、複数の試薬容器101を順番に吸引位置に搬送するステッピングモータを含む試薬庫用駆動部31を有する。試薬容器101には、試料に含まれる特定成分に対して選択的に反応する試薬が収容されている。
【0017】
第2の試薬庫100の試薬容器101には、前記第1の試薬庫100の試薬容器101に収容されている試薬と対をなす試薬が収容されている。
【0018】
試料庫200は、複数の試料容器201を円周方向に並べた状態で載置するディスクサンプラである試料ラック230と、試料ラック230を円周方向に回転させることにより、複数の試料容器201を順番に吸引位置に搬送するステッピングモータを含む試料庫用駆動部32とを有する。
【0019】
反応庫300は、複数の反応容器301を円周方向に並べた状態で載置する反応ライン330と、反応ライン330を円周方向に回転させることにより、複数の反応容器301を順番に吐出位置及び吐出位置に搬送するステッピングモータを含む反応庫用駆動部33とを有する。
【0020】
試薬アーム102の先端部には試薬プローブ103が設けられている。試薬アーム102を吸引位置と吐出位置との間で移動させるための電動モータを含む試薬アーム駆動部34が設けられている。
【0021】
試料アーム202の先端部には試料プローブ203が設けられている。試料アーム202を吸引位置と吐出位置との間で移動させるための電動モータを含む試料アーム駆動部35が設けられている。
【0022】
次に、自動分析装置の基本的な動作について、図1及び図2を参照して説明する。
試薬プローブ103を下降及び上昇させる試薬プローブ駆動部36と、試薬プローブ103により、試薬を吸引及び吐出させるためのポンプ(図示省略)と、電磁弁(図示省略)と、電磁弁を駆動させるアクチュエータ(図示省略)とを有する試薬吸排部が設けられている。試薬プローブ103が待機位置から吸引位置に移動すると、試薬プローブ駆動部36が試薬プローブ103を下降させる。電磁弁が作動して、試薬プローブ103により所定の試薬容器101から試薬を吸引させる。
【0023】
次に、電磁弁が作動し、試薬プローブ駆動部36が試薬プローブ103を上昇させる。試薬プローブ103が吸引位置から吐出位置に移動すると、試薬プローブ駆動部36が試薬プローブ103を下降させる。電磁弁が作動して、試薬プローブ103により所定の反応容器301に試料を吐出させる。次に、電磁弁が作動し閉じ、試薬プローブ駆動部36が試薬プローブ103を上昇させる。試薬プローブ103が吐出位置から待機位置に移動する。
【0024】
試料プローブ203を下降及び上昇させる試料プローブ駆動部37と、試料プローブ203により、試料を吸引及び吐出させるためのポンプ(図示省略)と、電磁弁(図示省略)と、電磁弁を駆動させるアクチュエータとを有する試料吸排部が設けられている。試料プローブ203が待機位置から吸引位置に移動すると、試料プローブ駆動部37が試料プローブ203を下降させる。電磁弁が作動して、試料プローブ203により所定の試料容器201から試料を吸引させる。
【0025】
次に、電磁弁が作動し、試料プローブ駆動部37が試料プローブ203を上昇させる。試料プローブ203が吸引位置から吐出位置に移動すると、試料プローブ駆動部37が試料プローブ203を下降させる。電磁弁が作動して、試料プローブ203により所定の反応容器301に試料を吐出させる。次に、電磁弁が作動し閉じ、試料プローブ駆動部37が試料プローブ203を上昇させる。試料プローブ203が吐出位置から待機位置に移動する。
【0026】
以上のように、試料及び試薬が分注された反応容器301を、反応庫用駆動部33によって、測光ユニット190の方へ移動させる。それまでの間、反応容器301内の試料及び試薬は攪拌子(図示省略)によって攪拌される。測光ユニット190は、攪拌後の反応容器301に光を照射して、透過した光から設定波長における吸光度を測定する。
【0027】
以上、第1実施形態に係る自動分析装置の基本的な構成及び動作について説明した。この自動分析装置は、更に次の構成を有している。
【0028】
次に、この自動分析装置の更なる構成について、図3から図7を参照に説明する。図3は上下方向に破断して示すホルダー部材と、ホルダー部材の内部機構の正面図、図4は試薬プローブの配置位置以外の位置に移動させたカム部材の正面図、図5は(a)は、試薬プローブの配置位置に移動させた傾斜部を破線で示す平面図、(b)は、試薬プローブの配置位置以外の位置に移動させた傾斜部を破線で示す平面図、図6(a)は斜め上方から見たカム部材の斜視図、(b)は斜め下方から見たカム部材の斜視図、図7は試薬プローブ等の側面図である。
【0029】
以下、試薬庫100の構成を代表して説明し、試料庫200の構成については、試薬庫100と同じ構成をしているため、その説明を省略する。
【0030】
自動分析装置は、吸引位置と吐出位置との間を往復移動するホルダー部材120を有している。ホルダー部材120は、大径の筒形状に形成されている。試薬アーム102の先端部の下面側には、ホルダー部材120がその筒軸中心を上下方向にして設けられている。試薬アーム102の先端部の上面側には、電動モータであるカム部材用駆動部38が設けられている。ホルダー部材120及びカム部材用駆動部38は、共に、試薬アーム102のカバー102aの内部に設けられている。カバー102aを図4及び図5に二点鎖線でそれぞれ示す。
【0031】
ホルダー部材120の下端の筒底部121には、2つの案内孔122、122が設けられている。2本の試薬プローブ103が、2つの案内孔122に通されることにより、昇降可能にそれぞれ支持されている。2本の試薬プローブ103は、長手方向を上下方向にして水平面上の円周C1方向に所定間隔W1以上離間した位置に配されている。円周C1を図5(a)、(b)に二点鎖線で示す。
【0032】
ホルダー部材120には、小径の筒形状に形成されたカム部材130が嵌め込まれている。カム部材130は、ホルダー部材120の筒壁部123に軸受け部材140を介して筒軸中心に回転可能に支持されている。大径のホルダー部材120の内部空間をカム部材130の取付スペースに有効に利用することが可能となる。カム部材130は、2本の試薬プローブ103の各配置位置に選択的に水平面上を移動し、選択された配置位置に移動した場合、配置位置にある試薬プローブ103に当接することにより、試薬プローブ103に対し下降方向の力を与える。
【0033】
カム部材130は、下方向に開いた筒口131を有している。カム部材130の筒壁部132は、試薬プローブ103を配置した前記円周C1に対応させるように形成されている。筒壁部132は円周C1方向に対して斜め下方向に傾斜する第1の傾斜部133、最も低い位置で平坦な底部133a、及び、斜め上方に立ち上がる第2の傾斜部133を有している。第1及び第2の傾斜部133は、底部133aを中心として、左右対称に形成されている。底部133aは、円周1に沿うように所定の長さを有していて、所定の長さの範囲内では、試薬プローブ103を下降位置に保持する。第1及び第2の傾斜部133は、所定間隔W1より狭い範囲W2内に設けられている。所定間隔W1より狭い範囲W2内に第1及び第2の傾斜部133を設けることにより、所定間隔W1以上離間した2本の試薬プローブ103は、第1及び第2の傾斜部133による下降方向の力を同時に受けることはない。第1及び第2の傾斜部133並びに底部133aを図5(a)、(b)に点線で示す。また、所定間隔W1より狭い範囲W2を図6(a)に示す。
【0034】
カム部材130の第1及び第2の傾斜部133は、試薬プローブ103の昇降量に相当する高さを有している。第1及び第2の傾斜部133は、底部133aを中心として、左右対称に形成されている。左右対称に形成された第1及び第2の傾斜部133により、カム部材130の正転又は逆転のいずれの方向であっても、試薬プローブ103に対し、下降方向の力を与えることが可能となる。また、カム部材130を正転又は逆転させることにより、2本の試薬プローブ103を交互に昇降させることが可能となる。
【0035】
カム部材130の第1及び第2の傾斜部133は、その筒壁部132を所定量だけ内側へ凹ませることにより形成されている。また、底部133aは、筒口131の周縁部131aの一部に形成されている。なお、第1及び第2の傾斜部133も筒口131の周縁部131aの一部に形成しても良いが、筒壁部132を凹ませることにより形成された第1及び第2の傾斜部133の方が、試薬プローブ103を安定して移動させることができる。
【0036】
カム部材130の筒壁部132は、水平面上の円周C1方向に沿うように形成された水平部137を有している。水平部137は、第1及び第2の傾斜部133の最も高い位置133bと同じ高さを有している。水平部137においても、筒口131の周縁部131aの一部に形成しても良いが、筒壁部132を凹ませることにより形成された水平部137の方が、試薬プローブ103を安定して移動させることができる。
【0037】
カム部材130の上端である天井部134には、筒軸中心の回転軸135が設けられている。回転軸135は、カム部材用駆動部38の出力軸に連結されている。また、カム部材130の天井部134には、カム部材130の外部に連通する貫通孔136が設けられている。
【0038】
試薬プローブ103は、長手方向の中間部103aがS字状に形成されている。長手方向を上下方向にして配され、その長手方向の中間部103aが略S字状に形成された試薬プローブ103を図7に示す。
【0039】
中間部103aより上側である試薬プローブ103の上部103bは、カム部材130の筒壁部132の内壁面の位置より径方向で内側に配されている。試薬プローブ103の上端部には、可撓性を有するチューブ150が連結されている。試薬プローブ103の上部103b及びチューブ150は、カム部材130の内壁面に沿って上方に延びるように形成されている。
【0040】
中間部103aより下側である試薬プローブ103の下部103cは、カム部材130の筒壁部132の位置より径方向で外側に配され、ホルダー部材120の内壁面に沿って下方向に延びるように形成されている。
【0041】
試薬プローブ103の中間部103aは被当接部材160が設けられている。被当接部材160は、細長板状に形成され、中間部103aに上方から嵌め込まれている。中間部103aがS字状に形成されているため、細長板状の被当接部材160を嵌め込み易くなっている。被当接部材160は、前記水平面上の円周C1に沿った位置に配置され、第1及び第2の傾斜部133、底部133a、及び、水平部137に当接可能になっている。また、本実施形態では、被当接部材160を上下方向に案内するためのリブ状の案内溝124が、ホルダー部材120の筒壁部123に沿うように形成されている。案内溝124が被当接部材160を上下方向に案内することにより、被当接部材160を介して試薬プローブ103をより安定的に支持する。また、被当接部材160の上端部は、第1及び第2の傾斜部133に沿って滑らせ易くするために、丸みを帯びている。被当接部材160を図5(a)、(b)においてハッチングを施して示す。
【0042】
試薬プローブ103は、被当接部材160を介して、第1及び第2の傾斜部133からの下降方向の力を間接的に受ける。なお、被当接部材160等を介さずに、直接的に受けるようにしも良いが、間接的に受けた方が、試薬プローブ103の強度を必要以上に高くせずに済む。
【0043】
試薬プローブ103は、コイル状のばね部材170により、上方向の付勢力を受けている。ばね部材170は、案内孔122の周縁部と被当接部材160との間に圧縮された状態で、試薬プローブ103の下部103cに嵌められている。案内溝124の中にばね部材170は嵌り、さらに、そのばね部材170の中に試薬プローブ103の下部103cが嵌ることにより、試薬プローブ103を安定的に支持する。
【0044】
試薬プローブ103の上端部に連結されたチューブ150は、カム部材130の貫通孔136を通って、カム部材130の外部に延ばされ、さらに、ホルダー部材120の外部に延ばされている。貫通孔136は、回転軸135中心の円弧形状に形成されている。
【0045】
次に、自動分析装置の一連の動作について説明する。なお、以下の説明においては、試薬分注を代表して説明し、試料(サンプル)分注の説明を省略する。
【0046】
吸引位置に移動した試薬容器101中の試薬を、吐出位置に移動した反応容器301に分注する場合において、試薬アーム102を回動させて、ホルダー部材120を吸引位置と吐出位置との間に移動させる。移動中においては、試薬プローブ103を上昇位置に保持する。このとき、カム部材130の水平部137が、被当接部材160に当接している。
【0047】
ホルダー部材120を吸引位置又は吐出位置に移動させた場合、カム部材用駆動部38によりカム部材130を回転させる。それにより、カム部材130の第1の傾斜部133が、被当接部材160に当接し、被当接部材160が斜め下方向の第1の傾斜部133に沿って、最も高い位置133bから最も低い位置の底部133aの方へ相対的に滑るようになる。それにより、試薬プローブ103が下降方向の力を受けて、ばね部材170の付勢力に抗して下降する。カム部材130の底部133aに当接させた被当接部材160を図3及び図5(a)に示す。このとき、試薬プローブ103は、最も下がった位置に下降する。下降させた試薬プローブ103により、試薬容器101中の試薬を吸引し、又は、反応容器301に試薬を吐出することが可能となる。
【0048】
試薬プローブ103による試薬の吸引又は突出を終了した場合、カム部材用駆動部38によりカム部材130を図5(a)で時計方向に回転させる。それにより、被当接部材160が、斜め上方向の第2の傾斜部133に沿って最も低い位置の底部133aから最も高い位置133bの方へ相対的に滑るようになる。それにより、試薬プローブ103がばね部材170の付勢力で上昇する。試薬プローブ103を上昇位置に保持させることができる。カム部材130の第1及び第2の傾斜部133から離れ、水平部137に当接した被当接部材160を図4及び図5(b)に示す。それにより、2本の試薬プローブ103を上昇位置に保持させることができる。試薬アーム102を回動させて、ホルダー部材120を吸引位置と吐出位置との間に移動させることができる。また、ホルダー部材120を洗浄位置に移動させることができる。
【0049】
次に、試薬プローブ103の洗浄について説明する。洗浄は、2本の試薬プローブ103を共に上昇位置に保持させた図4に示す状態で行う。試薬の分注に使用した試薬プローブ103であるか否かに関係なく、2本の試薬プローブ103が共に洗浄される。それにより、通常の洗浄水洗浄で試薬プローブ103を十分に洗浄することが可能となる。
【0050】
上記自動分析装置は、プログラムを基に一連の動作を行う。制御部21は、プログラムに基づく、試薬プローブ103の選択を受けて、試薬プローブ103に対応する位置情報を記憶部23から読み出し、位置情報を基に制御情報(モータであるカム部材用駆動部38の回転量に相当するパルス数)を作成し、カム部材用駆動部38に出力する。判断部22は、カム部材用駆動部38からカム部材130の位置情報を受け、前記選択された試薬プローブ103の位置情報と、カム部材130の位置情報とが対応するか否かを判断する。制御部21は、両方の位置情報が対応したとの判断部22からの判断を受けて、カム部材130の現在の位置情報を記憶部23に書き込む。一方で、制御部21は、所定時間を経過した場合でも、両方の位置情報が対応しないとの判断部22からの判断を受けて、エラー情報を表示制御部(図示省略)に出力する。表示制御部は、モニター(図示省略)にエラー情報を表示させる。
【0051】
また、制御部21は、コントロールパネル40に設けられたプローブ選択スイッチ41の操作を受けて、選択された試薬プローブ103に対応する動作情報を記憶部23から読み出し、カム部材用駆動部38に出力する。以上により、試薬プローブ103を選択的に下降位置に保持し、試薬分注に使用することが可能となる。このように構成したことにより、試薬干渉が発生し易い試薬を分注する場合であっても、試薬プローブ103を選択的に使用し、試薬干渉が発生しないように測定項目の順序を変更する必要がなく、測定項目の順序を自由に設定することが可能となる。なお、この試薬分注と同様に、試料分注においても、複数の試料プローブ203を備え、試料プローブ203を選択的に使用可能に構成することにより、試料干渉が発生し易い試料を分注する場合であっても、測定項目の順序を自由に設定することが可能となる。
【0052】
次に、試薬アーム102に、試薬プローブ103、モータであるカム部材用駆動部38、ホルダー部材120、及び、カム部材130等を組み付ける工程について説明する。
ホルダー部材120の案内孔122にばね部材170を嵌め込み、さらに、試薬プローブ103を嵌め込む。次に、ホルダー部材120に軸受け部材140を介して、カム部材130を嵌め込む。このとき、例えば、2本の試薬プローブ103の被当接部材160が共に水平部137に当たる図4に示す回転位置(初期位置)にカム部材130を位置合わせておく。これに限らず、カム部材130の位置合わせは、全ての組み付けが終了後、カム部材130を所定位置に回転させて、コントロールパネル40の操作を受けて、制御部21が、前記所定位置を初期位置として記憶部23に記憶させるようにしても良い。
【0053】
以上のようにして、ホルダー部材120内に、カム部材130等が予め組み付けられる。このホルダー部材120を、試薬アーム102の取付穴102bに嵌め込む。次に、取付プレート381を被せ、さらに、カム部材用駆動部38の出力軸をカム部材130の回転軸135と連結し、さらに、取付プレート381の下孔382、ホルダー部材120の下孔125、及び、試薬アーム102の下孔102cを合わせ、取付ボルト383を通して、取付プレート381、ホルダー部材120、及び、試薬アーム102を固定する。各下孔382、125、102cは、それぞれ回転軸135の円周方向に各所定間隔で多数設けられている。
【0054】
以上の構成によれば、各下孔382、125、102bを適宜合わせることにより、取付プレート381、ホルダー部材及び試薬アーム102の各1つの部材を他の2つの部材に対し相対的な回転位置を調整することが可能となる。例えば、試薬アーム102に対する試薬プローブ103の相対的な位置が調整可能となる。
【0055】
なお、前記第1実施形態では、2本の試薬プローブ103を備えたホルダー部材120を示したが、3本以上の試薬プローブ103を備えるようにしても良い。
【0056】
また、前記第1実施形態では、端面カムに類似したカム部材130を示したが、確動カムであっても良い。確動カムにすることにより、ばね部材170が不要となる。さらに、カム部材130を円周方向に移動させるものを示したが、直線方向に移動させるものであっても良い。
【0057】
さらに、カム部材130の第1及び第2の傾斜部133を底部133aを中心として対称的に形成したが、非対称に形成しても良い。例えば、第2の傾斜部133を上方向に垂直に立ち上がるように形成しても良い。この場合、カム部材130は、一方向に回転し、試薬プローブ103の被当接部材160を第1の傾斜部133から底部133aを相対的に移動させ、第2の傾斜部133で真上の水平部137に移動させるようになる。
【0058】
[第2実施形態]
次に、本発明の第2実施形態に係る自動分析装置について図8を参照して説明する。図8は、自動分析装置の動作を概念的に示す図である。
【0059】
この第2実施形態では、試料の分注を代表して説明し、試薬の分注は試料の分注と同じであり、その説明を省略する。カム部材130の筒壁部132は、高さ位置が互いに異なる複数種類の底部133aを有している。なお、図8では、円周C1に沿って形成された第1及び第2の傾斜部133、及び、円周C1上の位置に配置された試料プローブ203を展開してそれぞれ示した。
【0060】
上記構成を有する自動分析装置の動作は、例えば、試料溶液201中の試料がその性質により、2層に分離するような場合、カム部材130を移動させ、底部133aの中で、比較的に高い方を被当接部材160に当接させて、試料プローブ203を所定位置まで下降させて、試料溶液201中の上層の試料を吸引する。前記高い方を当接させた被当接部材160を図8(a)に示す。
【0061】
上層の試料を吸引した後に、さらに、図8(a)において、カム部材130を右へ移動させ、高い方を被当接部材160から離間させる。一方で、底部133aの中で、比較的低い方を別の被当接部材160に当接させて、試料プローブ203を所定位置まで下降させて、試料溶液201中の下層の試料を吸引する。前記低い方を当接させた被当接部材160を図8(b)に示す。
【0062】
以上の通り、2本の試料プローブ203を各所定位置までそれぞれ下降させることにより、各層得の試料の吸引の間に、洗浄工程を設けることなく、連続的に2層の試料を吸引することが可能となる。
【0063】
なお、高さの異なる底部133aを3種類以上設けることにより、3以上の層に分離するような試料にも適用することが可能となる。
【0064】
前記実施形態では、複数のプローブのそれぞれを試薬プローブ103の専用として使用し、または、試料プローブ203の専用として使用したが、これに限らない。
【0065】
[第3の実施形態]
次に、本発明の第3実施形態に係る自動分析装置について図9を参照して説明する。図9は、自動分析装置の動作を概念的に示す図である。
【0066】
1つのホルダー部材120の中に複数のプローブを備え、複数のプローブの中の1以上を試薬プローブ103の専用として使用する一方で、他方のプローブを試料プローブ203の専用として使用しても良い。
【0067】
1つのホルダー部材120の円周状の移動軌跡であって、その軌跡上に、試薬の吸引位置P1、試料の吸引位置P2、及び、試薬又は試料の吐出位置P3を設けたものを図9に一点鎖線で示す。
【0068】
上記構成によれば、アーム及びホルダー部材120を統合することが可能となり、それにより、分注用機構の設置スペースを縮小することが可能となり、部品点数を削減することが可能となる。
【符号の説明】
【0069】
10 自動分析装置 21 制御部 22 判断部 23 記憶部
38 カム部材用駆動部 381 取付プレート 382 下孔
383 取付ボルト 40 コントロールパネル 41 プローブ選択スイッチ
100 試薬庫 101 試薬容器 102 試薬アーム
102a カバー 102b 取付穴 102c 下孔 103 試薬プローブ
110 試薬庫ケース 120 ホルダー部材 121 筒底部 122 案内孔
123 筒壁部 124 案内溝 125 下孔 130 カム部材
131 筒口 131a 周縁部 132 筒壁部 133 傾斜部
133a 底部 133b 最も高い位置 134 天井部
135 回転軸 136 貫通孔
137 水平部 140 軸受け部材 150 チューブ
160 被当接部材 170 ばね部材 190 測定ユニット
200 試料庫 201 試料容器 202 試料アーム
203 試料プローブ 230 試料ラック 300 反応庫
301 反応容器 330 反応ライン
【特許請求の範囲】
【請求項1】
吸引位置に移動した第1容器中の試薬又は試料を、吐出位置に移動した第2容器に分注し、該分注された試料の成分を分析する自動分析装置において、
前記吸引位置と前記吐出位置との間を往復移動するホルダー部材と、
長尺状にそれぞれが形成され、長手方向を上下方向にして水平面上の各位置に配置され、昇降可能に前記ホルダー部材に支持された複数のプローブと、
前記各プローブの配置位置に選択的に前記水平面上を移動するように前記ホルダー部材に支持され、前記選択された配置位置に移動した場合、該配置位置にある前記プローブに当接することにより、該プローブに対し下降方向の力を与えるカム部材と、
を有する
ことを特徴とする自動分析装置。
【請求項2】
前記各プローブは、前記水平面上の円周方向に所定間隔以上離間した位置に配置され、
前記ホルダー部材は、大径の筒形状に形成され、
前記カム部材は、小径の筒形状に形成され、前記ホルダー部材に嵌め込まれ、該ホルダー部材の筒壁部に軸受け部材を介して筒軸中心に回転可能に支持された筒壁部を有し、
前記カム部材の筒壁部は、前記所定間隔より狭い範囲内に設けられ、前記円周方向に対して斜め下方向に傾斜する第1の傾斜部、最も低い位置で平坦な底部、及び、該底部から上方に立ち上がる第2の傾斜部を有していることを特徴とする請求項1に記載の自動分析装置。
【請求項3】
前記筒壁部は、高さ位置が互いに異なる複数種類の前記底部を有していることを特徴とする請求項2に記載の自動分析装置。
【請求項4】
前記円周上の各位置に配され、前記プローブの長手方向の中間部に設けられた、前記第1の傾斜部、前記底部、及び前記第2の傾斜部と当接する被当接部材を有していることを特徴とする請求項2又は請求項3に記載の自動分析装置。
【請求項5】
前記プローブの中間部がS字状に形成され、
前記中間部より上側である前記プローブの上部は、前記カム部材の筒壁部の位置より径方向で内側に配され、前記カム部材の筒壁部の内壁面に沿って上方に延びるように形成され、
前記中間部より下側である前記プローブの下部は、前記カム部材の筒壁部の位置より径方向で外側に配され、前記ホルダー部材の内壁面に沿って下方向に延びるように形成され、前記ホルダー部材の下端の筒底部に穿たれた案内孔に通されることにより、昇降可能に案内され、
前記被当接部材は、前記プローブの中間部に上方から嵌め込まれていることを特徴とする請求項4に記載の自動分析装置。
【請求項6】
前記案内孔の周縁部と前記被当接部材との間に圧縮された状態で、前記プローブの下部に嵌められたコイル状のばね部材を有していることを特徴とする請求項5に記載の自動分析装置。
【請求項1】
吸引位置に移動した第1容器中の試薬又は試料を、吐出位置に移動した第2容器に分注し、該分注された試料の成分を分析する自動分析装置において、
前記吸引位置と前記吐出位置との間を往復移動するホルダー部材と、
長尺状にそれぞれが形成され、長手方向を上下方向にして水平面上の各位置に配置され、昇降可能に前記ホルダー部材に支持された複数のプローブと、
前記各プローブの配置位置に選択的に前記水平面上を移動するように前記ホルダー部材に支持され、前記選択された配置位置に移動した場合、該配置位置にある前記プローブに当接することにより、該プローブに対し下降方向の力を与えるカム部材と、
を有する
ことを特徴とする自動分析装置。
【請求項2】
前記各プローブは、前記水平面上の円周方向に所定間隔以上離間した位置に配置され、
前記ホルダー部材は、大径の筒形状に形成され、
前記カム部材は、小径の筒形状に形成され、前記ホルダー部材に嵌め込まれ、該ホルダー部材の筒壁部に軸受け部材を介して筒軸中心に回転可能に支持された筒壁部を有し、
前記カム部材の筒壁部は、前記所定間隔より狭い範囲内に設けられ、前記円周方向に対して斜め下方向に傾斜する第1の傾斜部、最も低い位置で平坦な底部、及び、該底部から上方に立ち上がる第2の傾斜部を有していることを特徴とする請求項1に記載の自動分析装置。
【請求項3】
前記筒壁部は、高さ位置が互いに異なる複数種類の前記底部を有していることを特徴とする請求項2に記載の自動分析装置。
【請求項4】
前記円周上の各位置に配され、前記プローブの長手方向の中間部に設けられた、前記第1の傾斜部、前記底部、及び前記第2の傾斜部と当接する被当接部材を有していることを特徴とする請求項2又は請求項3に記載の自動分析装置。
【請求項5】
前記プローブの中間部がS字状に形成され、
前記中間部より上側である前記プローブの上部は、前記カム部材の筒壁部の位置より径方向で内側に配され、前記カム部材の筒壁部の内壁面に沿って上方に延びるように形成され、
前記中間部より下側である前記プローブの下部は、前記カム部材の筒壁部の位置より径方向で外側に配され、前記ホルダー部材の内壁面に沿って下方向に延びるように形成され、前記ホルダー部材の下端の筒底部に穿たれた案内孔に通されることにより、昇降可能に案内され、
前記被当接部材は、前記プローブの中間部に上方から嵌め込まれていることを特徴とする請求項4に記載の自動分析装置。
【請求項6】
前記案内孔の周縁部と前記被当接部材との間に圧縮された状態で、前記プローブの下部に嵌められたコイル状のばね部材を有していることを特徴とする請求項5に記載の自動分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−13047(P2011−13047A)
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願番号】特願2009−156285(P2009−156285)
【出願日】平成21年6月30日(2009.6.30)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願日】平成21年6月30日(2009.6.30)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]