
自動分析装置
【課題】測定結果の信頼性の向上を可能とする自動分析装置の提供。
【解決手段】サンプルディスク32Aは、同心円上に配列された複数のサンプル容器34を保持する。サンプルディスク支持機構36は、サンプルディスク32Aを回転可能に支持する。サンプルプローブ63Aは、分注対象のサンプルを分注する。サンプルアーム61Aは、サンプルプローブ63Aをサンプル吸入位置とサンプル吐出位置とを結ぶ移動経路67に沿って回転移動可能に支持する。サンプルプローブ回転制御部は、サンプルアーム61Aを制御し、移動経路67に沿ってサンプルプローブ63Aをサンプル吸入位置PAからサンプル吐出位置まで回転移動する。サンプルディスク回転制御部は、サンプルディスクディスク支持機構36を制御し、サンプルディスク32Aを回転し、サンプルディスク32A上に設けられ、サンプルプローブ63Aから落下されたサンプルを受けるための退避エリア39Aを移動経路67下に配置する。
【解決手段】サンプルディスク32Aは、同心円上に配列された複数のサンプル容器34を保持する。サンプルディスク支持機構36は、サンプルディスク32Aを回転可能に支持する。サンプルプローブ63Aは、分注対象のサンプルを分注する。サンプルアーム61Aは、サンプルプローブ63Aをサンプル吸入位置とサンプル吐出位置とを結ぶ移動経路67に沿って回転移動可能に支持する。サンプルプローブ回転制御部は、サンプルアーム61Aを制御し、移動経路67に沿ってサンプルプローブ63Aをサンプル吸入位置PAからサンプル吐出位置まで回転移動する。サンプルディスク回転制御部は、サンプルディスクディスク支持機構36を制御し、サンプルディスク32Aを回転し、サンプルディスク32A上に設けられ、サンプルプローブ63Aから落下されたサンプルを受けるための退避エリア39Aを移動経路67下に配置する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、サンプルに含まれる成分の濃度や活性値等を試薬との化学反応を利用して光学的又は電気的に測定する自動分析装置に関する。
【背景技術】
【0002】
血清や尿等のサンプルが収容されるサンプル容器は、サンプルディスク上に円周状に設置されている。近年、サンプルディスクに設置されるサンプル容器の数が増加している。サンプル容器の数の増加に伴い、例えば、内周サンプルディスクと外周サンプルディスクとからなるサンプルディスクが登場している(例えば、特許文献1参照)。内周サンプルディスクと外周サンプルディスクとの各々には、円周上に複数のサンプル容器が設置されている。このように、サンプル容器は、同心円上に並べて設置されている。
【0003】
サンプルは、サンプルプローブによりサンプル容器から吸入され、移動経路に沿って回転移動され、反応ディスク内の反応管へ吐出される。移動経路下には、分注対象のサンプルが収容されたサンプル容器だけでなく、他のサンプルが収容されたサンプル容器も配置されている。サンプルプローブの汚れや振動等により、回転移動中、サンプルプローブの内壁や外壁に付着されたサンプルが他のサンプル容器に落下してしまう場合がある。この場合、落下したサンプルは、元々他のサンプル容器に収容されていたサンプルを汚染してしまい、サンプルの測定結果に悪影響を与える。このように、サンプルプローブからのサンプルの落下は、測定結果の信頼性を低下させている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平06―230016号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、測定結果の信頼性の向上を可能とする自動分析装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の第1局面に係る自動分析装置は、同心円上に配列された複数の容器を保持するディスクと、前記同心円に沿って前記ディスクを回転可能に支持するディスク支持機構と、前記複数の容器の各々から溶液を分注するプローブと、前記プローブを溶液の吸入位置と吐出位置とを結ぶ移動経路に沿って回転移動可能に支持するプローブ支持機構と、前記プローブ支持機構を制御し、前記移動経路に沿って前記プローブを前記吸入位置から前記吐出位置まで回転移動するプローブ制御部と、前記ディスク支持機構を制御し、前記ディスクを回転し、前記ディスク上に設けられ、前記プローブから落下された溶液を受けるための退避エリアを前記移動経路下に配置するディスク制御部と、を具備する。
【発明の効果】
【0007】
本発明によれば、測定結果の信頼性の向上を可能とする自動分析装置を提供することが可能となる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態に係る自動分析装置の外観を示す図。
【図2】本実施形態の第1実施例に係るサンプラをステージ上方から眺めた外観図。
【図3】第1及び第2実施例に係る自動分析装置のサンプル系統とその他の主要構成要素との機能ブロック図。
【図4】図3のサンプル系統制御部による制御に従って行なわれる第1実施例に係るサンプルの分注動作の典型的な流れを示す図。
【図5】本実施形態の第2実施例に係るサンプラをステージ上方から眺めた外観図。
【図6】図3のサンプル系統制御部による制御に従って行なわれる第2実施例に係るサンプルの分注動作の典型的な流れを示す図。
【発明を実施するための形態】
【0009】
以下、図面を参照しながら本発明の実施形態に係わる自動分析装置を説明する。
【0010】
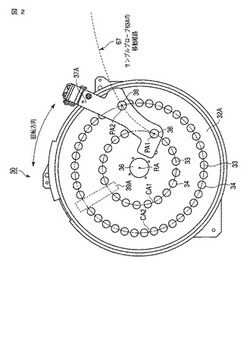
図1は、本発明の実施形態に係る自動分析装置1の外観を示す図である。図1に示すように自動分析装置1のステージ10の略中央部には反応ディスク22が設けられている。反応ディスク20は、円周上に配列された複数の反応管22を着脱可能に保持する。反応ディスク20は、所定のサイクルで回動と停止とを繰り返す。
【0011】
反応ディスク20の近傍には、サンプラ30が配置されている。サンプラ30は、円盤状のサンプルディスク32を備える。サンプルディスク32は、同心円上に配列された複数のサンプル容器34を保持する。サンプル容器34には、サンプルが収容されている。サンプルディスク32には、サンプルディスク支持機構36が取り付けられている。サンプルディスク支持機構36は、サンプルディスクを回転方向に沿って回転可能に支持する。回転方向は、サンプルディスク32の円周方向に一致する。例えば、サンプルディスク支持機構36は、回転軸回りにサンプルディスク32を回転し、分注対象のサンプルが収容されたサンプル容器(以下、分注対象のサンプル容器と呼ぶことにする)をサンプラ30上のサンプル吸入位置に配置する。
【0012】
反応ディスク20の近傍には、第1試薬庫40が配置される。第1試薬庫40は、円盤状の第1試薬ディスクを有する。第1試薬ディスクは、同心円上に配列された複数の第1試薬容器を保持する。第1試薬容器は、サンプルに含まれる各測定項目に応じた成分と化学反応する第1試薬を収容する。第1試薬ディスクには、第1試薬ディスク支持機構が取り付けられている。第1試薬ディスク支持機構は、第1試薬ディスクを回転方向に沿って回転可能に支持する。回転方向は、第1試薬ディスクの円周方向に一致する。例えば、第1試薬ディスク支持機構は、回転軸回りに第1試薬ディスクを回転し、分注対象の第1試薬が収容された第1試薬容器を第1試薬庫40上の第1試薬吸入位置に配置する。
【0013】
反応ディスク20の内側には、第2試薬庫50が配置される。第2試薬庫50は、円盤状の第2試薬ディスク52を有する。第2試薬ディスク52は、円周上に配列された複数の第2試薬容器54を保持する。第2試薬容器54は、第1試薬に対応する第2試薬を収容する。第2試薬ディスク52には、第2試薬ディスク支持機構56が取り付けられている。第2試薬ディスク支持機構56は、回転方向に沿って第2試薬ディスク52を回転し、分注対象の第2試薬が収容された第2試薬容器54を第2試薬庫50上の第2試薬吸入位置に配置する。回転方向は、第2試薬ディスク52の円周方向に一致する。
【0014】
反応ディスク20とサンプラ30との間にはサンプルアーム61Aが配置される。サンプルアーム61Aの先端には、サンプルプローブ63Aが取り付けられている。サンプルプローブ63Aは、図示しない電動式のサンプルポンプによりサンプルを吸入したり吐出したりする。サンプルアーム61Aは、サンプルプローブ63Aをサンプラ30上のサンプル吸入位置と反応ディスク20上のサンプル吐出位置とを結ぶ移動経路に沿って回転軸65A回りに回転移動可能に支持する支持機構である。また、サンプルアーム61Aは、サンプルプローブ63Aを上下動可能に支持する支持機構でもある。
【0015】
反応ディスク20と第1試薬庫40との間には第1試薬アーム61Bが配置される。第1試薬アーム61Bの先端には第1試薬プローブ63Bが取り付けられている。第1試薬プローブ63Bは、図示しない第1試薬ポンプにより第1試薬を吸入したり吐出したりする。第1試薬アーム61Bは、第1試薬プローブ63Bを第1試薬庫40上の第1試薬吸入位置と反応ディスク20上の第1試薬吐出位置とを結ぶ移動経路に沿って回転軸65B回りに回転移動可能に支持する支持機構である。また、第1試薬アーム61Bは、第1試薬プローブ63Bを上下動可能に支持する支持機構でもある。
【0016】
反応ディスク20の外周近傍には第2試薬アーム61Cが配置される。第2試薬アーム61Cの先端には第2試薬プローブ63Cが取り付けられている。第2試薬プローブ63Cは、図示しない第2試薬ポンプにより第2試薬を吸入したり吐出したりする。第2試薬アーム61Cは、第2試薬プローブ63Cを第2試薬庫50上の第2試薬吸入位置と反応ディスク20上の第2試薬吐出位置とを結ぶ移動経路に沿って回転軸65C回りに回転移動可能に支持する支持機構である。また、第2試薬アーム61Cは、第2試薬プローブ63Cを上下動可能に支持する支持機構でもある。
【0017】
さらに、反応ディスク20の外周近傍には、撹拌部70が設けられている。撹拌部70は、図示しない撹拌子を有している。撹拌部70は、反応ディスク20上の撹拌位置に反応管22が停止されると、撹拌子で反応管22内のサンプル及び第1試薬の混合液や、サンプル、第1試薬、及び第2試薬の混合液を撹拌する。反応管22内部の混合液は、反応ディスク20の内部等に設けられた測定部による測定に供される。
【0018】
本実施形態に係る自動分析装置1は、プローブ63(サンプルプローブ63A、第1試薬プローブ63B)の溶液吸入位置(サンプル吸入位置、第1試薬吸入位置)から溶液吐出位置(サンプル吐出位置、第1試薬吐出位置)までの回転移動前又は回転移動中にディスク(サンプルディスク32、第1試薬ディスク)を回転させることにより、プローブ63から容器(サンプル容器34、第1試薬容器)へ溶液が落下することを防止する。以下にこの防止策について詳細に説明する。なお、以下に説明する本実施形態に係る防止策は、サンプル系統と第1試薬系統との何れの分注系統にも適用可能である。しかしながら、説明を具体的に行なうため、サンプル系統を例に挙げて防止策について説明する。
【0019】
また、標準的なディスクサンプラ32の構造として第1のタイプと第2のタイプとが知られている。第1のタイプのサンプラは、単一のサンプルディスクを備える。第2のタイプのサンプラは、互いに独立して回転可能な内周サンプルディスクと外周サンプルディスクとを備える。第1実施例では第1のタイプのサンプラを例に挙げて本実施形態に係る防止策について説明し、第2実施例では第2のタイプのサンプラを例に挙げて本実施形態に係る防止策について説明する。
【0020】
(第1実施例)
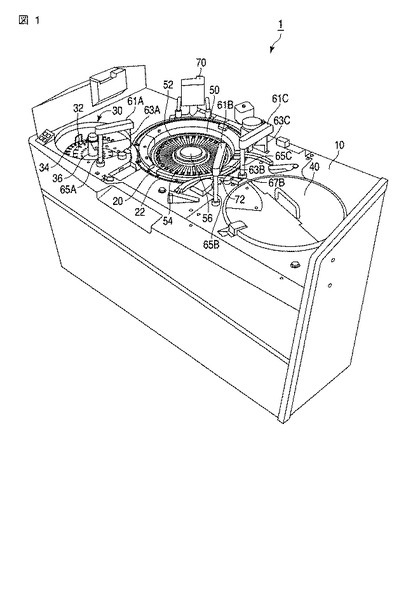
図2は、本実施形態の第1実施例に係るサンプラ30をステージ10の上方から眺めた外観図である。図2に示すように、サンプラ30は、円盤状のサンプルディスク32Aを搭載する。サンプルディスク32Aには、同心円上(複数の円周CA上)に配列された複数の容器保持孔33を有する。図2においては、複数の容器保持孔33は、中心(サンプルディスク32Aの円中心)を共有し、直径が異なる内周CA1と外周CA2とに配列される。各容器保持孔33には、サンプル容器34が挿入される。すなわち、内周CA1と外周CA2とは、サンプル容器34の吸引口の移動経路である。なお全ての容器保持孔33にサンプル容器34が挿入されている必要はなく、サンプル容器34が挿入されていない容器保持孔33があってもよい。また、サンプル容器34には、必ずしもサンプルが収容されていなくてもよい。
【0021】
各円周CA1、CA2とサンプルプローブ63Aの移動経路67とが重なるサンプラ30上の位置は、サンプル吸入位置PAに規定される。ここで、内周CA1上のサンプル吸入位置PAを内側吸入位置PA1、外周CA2上のサンプル吸入位置PAを外側吸入位置PA2と呼ぶことにする。分注対象のサンプル容器34が内周CA1に配置されている場合、サンプルディスク32Aが回転軸RA回りに回転することにより、分注対象のサンプル容器34は、内側吸入位置PA1に配置される。同様に、分注対象のサンプル容器34が外周CA2に配置されている場合、サンプルディスク32Aが回転軸RA回りに回転することにより、分注対象のサンプル容器34は、外側吸入位置PA2に配置される。
【0022】
サンプラ30は、安全板37Aを搭載している。安全板37Aは、サンプルディスク32Aの上方に配置される。安全板37Aは、サンプルディスク32A上の円周CAの数と同数のプローブ挿入孔38を有している。図2においては、安全板37Aは、2つのプローブ挿入孔38を有している。安全板37Aは、この2つのプローブ挿入孔38が内側吸入位置PA1(移動経路67と内周CA1との交点)と外側吸入位置PA2(移動経路67と外周CA2との交点)とにそれぞれ重なるように配置されている。安全板37Aは、オペレータによるサンプルアーム61Aやサンプルプローブ63A等への接触を防止したり、サンプルプローブ63Aからサンプルディスク32Aへのサンプルの落下を防止したりするために設けられている。
【0023】
サンプルディスク32A上には、退避エリア39Aが設けられている。退避エリア39Aは、サンプルプローブ63Aから落下したサンプルを受けるために設けられる。すなわち退避エリア39Aには、サンプルディスク32A上のエリアであって、非分注対象のサンプルが収容されたサンプル容器(以下、非分注対象のサンプル容器と呼ぶことにする)が占めるエリアは含まれない。なお分注対象のサンプルは、1サイクル毎に変更される。分注対象のサンプルが変更される毎に非分注対象のサンプルも変更される。
【0024】
退避エリア39Aには、大きく分けて2つのタイプがある。第1の退避エリア39Aは、サンプル容器34が配置されていないサンプルディスク32A上のエリアである。より具体的には、第1の退避エリア39Aは、例えば、容器挿入孔34が設けられていないサンプルディスク32A上のエリアである。この容器挿入孔34が設けられていないエリアは、このために特別に形成されても良いし、既存のサンプルディスクにおける容器挿入孔間のエリアであってもよい。また、第1の退避エリア39Aは、サンプル容器34が挿入されていない容器挿入孔33が占めるエリアであってもよい。また、第1の退避エリア39Aは、サンプル容器34の外壁に貼付されたバーコードを読み取るためのバーコード読み取り器の進入経路が占めるエリアであってもよい。第2の退避エリア39Aは、サンプルが収容されていない空のサンプル容器34の吸入口が占めるエリアである。これら退避エリア39Aの種類は、オペレータにより手動で又は操作卓を介して任意に設定可能である。
【0025】
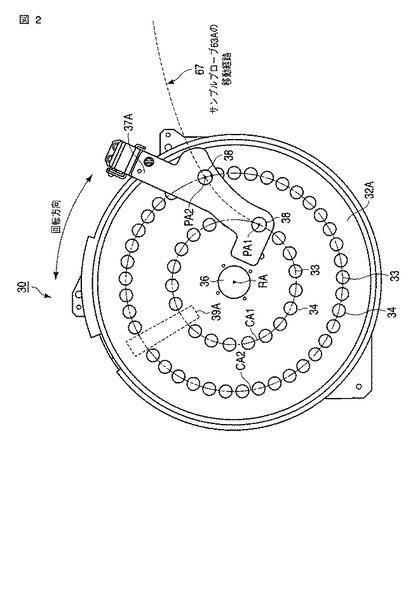
図3は、第1実施例に係る自動分析装置1のサンプル系統とその他の主要構成要素との機能ブロック図である。図3に示すように、自動分析装置1は、サンプル位置検出部81とサンプル系統制御部82とサンプル系統83とを有している。
【0026】
位置検出部81は、分注対象のサンプル容器34のサンプラ30上での位置や退避エリア39Aのサンプラ30上での位置を検出する。検出された位置のデータは、サンプル系統制御部82に供給される。
【0027】
なおサンプラ30上におけるサンプルディスク32A上の任意位置(例えば、各サンプル容器34の位置や退避エリア39Aの位置)は、例えば、サンプルディスク32Aの回転軸RA回りの回転角度により規定されている。例えば、サンプルディスク32A上の基準位置(例えば、番号1のサンプル容器34)が移動経路67下に配置されている状態を基準角度(θ=0)とする。これによりサンプルディスク32Aの基準位置のサンプラ30上の位置は、基準角度からの回転角度により規定される。また、サンプルディスク32A上の任意位置(例えば、各サンプル容器34の位置や退避エリア39Aの位置)は、サンプルディスク32A上の基準位置からの中心点(中心軸RAとサンプルディスク32Aとの交点)回りの回転角度により規定されている。従ってサンプルディスク32A上の任意位置のサンプラ30上の位置が規定できる。
【0028】
サンプル系統制御部82は、本実施形態に特有なサンプルの分注動作を実行するために、位置検出部81からの位置のデータ等に従ってサンプル系統83を制御する。図3に示すように、サンプル系統83は、サンプルディスク回転制御部84、サンプルディスク支持機構36、サンプルプローブ回転制御部85、サンプルプローブ上下動制御部86、サンプルアーム61A、サンプルポンプ制御部87、及びサンプルポンプ68Aを有する。
【0029】
サンプルディスク回転制御部84は、サンプル系統制御部82による制御に従ってサンプルディスク支持機構36を駆動制御する。サンプルディスク支持機構36は、サンプルディスク回転制御部84による駆動制御に従ってサンプルディスク32Aを回転する。
【0030】
サンプルプローブ回転制御部85は、サンプル系統制御部82による制御に従ってサンプルアーム61Aを駆動制御する。サンプルアーム61Aは、サンプルプローブ回転制御部85による駆動制御に従ってサンプルプローブ63Aを移動軌跡に沿って回転移動させる。
【0031】
サンプルプローブ上下動制御部86は、サンプル系統制御部82による制御に従ってサンプルアーム61Aを駆動制御する。サンプルアーム61Aは、サンプルプローブ上下動制御部86による駆動制御に従ってサンプルプローブ63Aを上下動させる。
【0032】
サンプルポンプ制御部87は、サンプル系統制御部82による制御に従ってサンプルポンプ68Aを駆動制御する。サンプルポンプ68Aは、サンプルポンプ制御部87による駆動制御に従ってサンプルプローブ63Aにサンプルを吸入させたり、サンプルを吐出させたりする。
【0033】
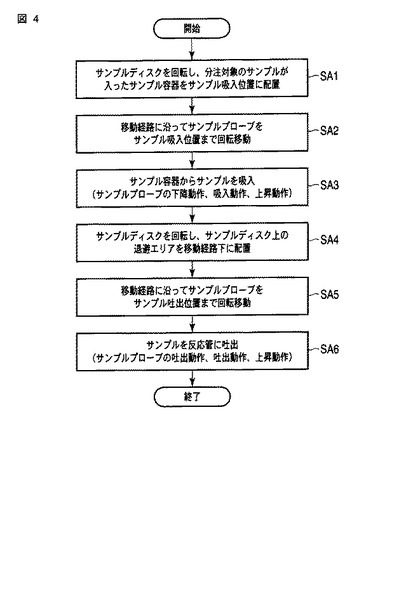
次に図4を参照しながら、サンプル系統制御部82による制御に従って行なわれる第1実施例に係るサンプルの分注動作の典型的な流れについて説明する。
【0034】
まずサンプル系統制御部82等により分注対象のサンプルが設定されると、位置検出部81は、設定された分注対象のサンプルが収容されたサンプル容器(分注対象のサンプル容器)34のサンプラ30上の位置を特定する。特定された位置のデータは、サンプル系統制御部82に供給される。
【0035】
そしてサンプル系統制御部82は、分注対象のサンプル容器34のサンプラ30上の位置に従ってサンプルディスク回転制御部85に回転処理を行なわせる(ステップSA1)。ステップSA1においてサンプルディスク回転制御部85は、分注対象のサンプル容器34のサンプラ30上の位置とサンプル吸入位置PAのサンプラ30上の位置とに従ってサンプルディスク支持機構36を駆動制御する。この駆動制御を受けてサンプルディスク支持機構36は、サンプルディスク32Aを回転軸RA回りに回転し、分注対象のサンプル容器34をサンプル吸入位置PAに配置する。
【0036】
ステップSA1が行なわれるとサンプル系統制御部82は、分注対象のサンプル容器34が配置されている円周CAの位置に従ってサンプルプローブ回転制御部85に回転移動処理を行なわせる(ステップSA2)。ステップSA2においてサンプルプローブ回転制御部85は、分注対象のサンプル容器34が配置されている円周CAの位置に応じてサンプルアーム61Aの回転移動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、移動経路67に沿ってサンプルプローブ63Aを回転移動し、分注対象のサンプル容器34が配置されている円周CA上のサンプル吸入位置PAにサンプルプローブ63Aを配置する。例えば、分注対象のサンプル容器34が内周CA1に配置されている場合、サンプルプローブ63Aは、内側吸入位置PA1に配置され、分注対象のサンプル容器34が外周CA2に配置されている場合、サンプルプローブ63Aは、外側吸入位置PA2に配置される。
【0037】
ステップSA2が行なわれるとサンプル系統制御部82は、サンプルプローブ上下動制御部86とサンプルポンプ制御部87とに吸入処理を行なわせる(ステップSA3)。ステップSA3においてサンプルプローブ上下動制御部86は、サンプルアーム61Aの上下動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、分注対象のサンプルや測定項目に応じた下降量だけサンプルプローブ63Aを下降させる。下降が終了するとサンプルポンプ制御部87は、サンプルポンプ68Aを駆動制御する。この駆動制御を受けてサンプルポンプ68Aは、所定量のサンプルをサンプルプローブ63Aを介してサンプル容器34から吸入する。所定量は、例えば、分注対象のサンプルや測定項目に応じて設定されている。吸入が終了するとサンプルプローブ上下動制御部86は、サンプルアーム61Aの上下動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、下降量と略同一の量だけサンプルプローブ63Aを上昇させる。
【0038】
ステップSA3が行なわれるとサンプル系統制御部82は、退避エリア39Aのサンプラ30上の位置に従ってサンプルディスク回転制御部84に回転処理を行なわせる(ステップSA4)。なお退避エリア39Aのサンプラ30上の位置は、ステップSA2が終了してからステップSAが開始されるまでの間に位置検出部81により検出され、検出された位置のデータは、サンプル系統制御部82に供給されているものとする。ステップSA4においてサンプルディスク回転制御部84は、退避エリア39Aのサンプラ30上の位置とサンプル吸入位置PAのサンプラ30上の位置とに従ってサンプルディスク支持機構36を駆動制御する。この駆動制御を受けてサンプルディスク支持機構36は、サンプルディスク32Aを回転軸RA回りに回転し、サンプルディスク32A上の退避エリア39Aを移動経路67下に配置する。
【0039】
なお、図2において退避エリア39Aは一箇所に設けられている。しかしながら本実施形態は、これに限定する必要はない。例えば、退避エリア39Aは、サンプルディスク32A上に複数個所設けられていても良い。この場合、複数の退避エリア39Aのうちの特定の退避エリア39Aがオペレータにより操作卓を介して設定される。ステップSA2が終了してからステップSAが開始されるまでの間に位置検出部81は、設定された退避エリア39のサンプラ30上の位置を検出する。そしてステップS4においてサンプルディスク回転制御部34は、設定された退避エリア39を移動経路67下に配置する。
【0040】
また、内周CA1上の退避エリア39Aと外周CA2上の退避エリア39Aとがサンプルディスク32A上の同一径上に無い場合がある。この場合、サンプルディスク支持機構36は、外周CA2上の退避エリア39Aを移動経路67下に配置する。
【0041】
また、分注対象のサンプル容器34が外周CA2上に配置されている場合、サンプルプローブ63Aから他のサンプル容器34内へサンプルが落下する虞が無いので、ステップSA4は行なわれなくても良い。この場合、ステップSA3の次にステップSA5が行なわれる。
【0042】
ステップSA4が行なわれるとサンプル系統制御部82は、サンプルプローブ回転制御部85に回転移動処理を行なわせる(ステップSA5)。ステップSA5においてサンプルプローブ回転制御部85は、サンプルアーム61Aの回転移動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、移動経路67に沿ってサンプルプローブ61Aを回転移動し、反応ディスク20上のサンプル吐出位置にサンプルプローブ63Aを配置する。
【0043】
ステップSA5が行なわれるとサンプル系統制御部82は、サンプルプローブ上下動制御部86とサンプルポンプ制御部87とに吐出処理を行なわせる(ステップSA6)。ステップSA6においてサンプルプローブ上下動制御部86は、サンプルアーム61Aの上下動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、吐出のための下降量だけサンプルプローブ63Aを下降させる。下降が終了するとサンプルポンプ制御部87は、サンプルポンプ68Aを駆動制御する。この駆動制御を受けてサンプルポンプ68Aは、ステップSA3において吸入したサンプルをサンプルプローブ63Aを介して反応管22に吐出する。吐出が終了するとサンプルプローブ上下動制御部86は、サンプルアーム61Aの上下動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、下降量と略同一の量だけサンプルプローブ63Aを上昇させる。
【0044】
ステップSA6が終了するとサンプル系統制御部82は、第1実施例に係るサンプルの分注動作を終了する。この後、別のサンプルについて分注をする場合、サンプル系統制御部82による制御に従って再び図4の分注動作が行われる。
【0045】
(第2実施例)
次に本実施形態の第2実施例について説明する。なお以下の説明において、第1実施例と略同一の機能を有する構成要素については、同一符号を付し、必要な場合にのみ重複説明する。
【0046】
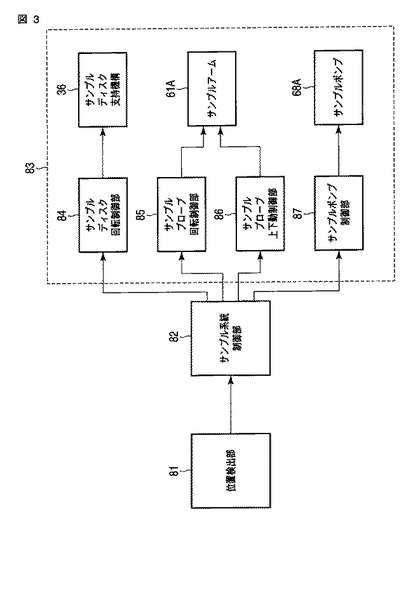
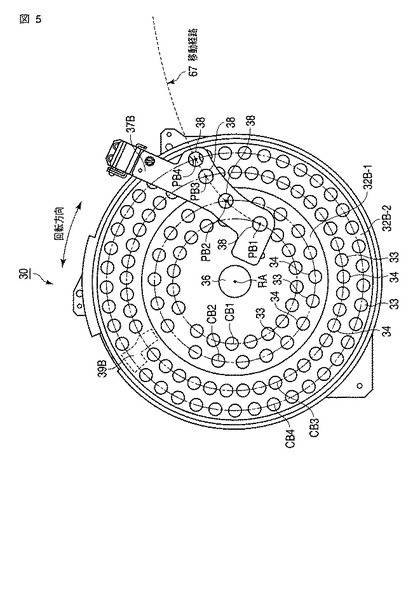
図5は、本実施形態の第2実施例に係るサンプラ30をステージ10の上方から眺めた外観図である。図5に示すように、第2実施例に係るサンプラ30は、内周サンプルディスク32B―1と外周サンプルディスク32B―2とを搭載する。内周サンプルディスク32B―1と外周サンプルディスク32B―2とは、互いに独立して回転可能にサンプルディスク支持機構36により支持されている。
【0047】
各サンプルディスク32B―1、32B―2には、同心円上(複数の円周上)に配列された複数の容器保持孔33を有する。図5において複数のサンプル容器33は、中心を共有し直径が異なる4つの円周CB1、CB2、CB3、CB4上に配列される。ここで、4つの円周CB1、CB2、CB3、CB4を内側から順番に第1円周CB1、第2円周CB2、第3円周CB3、第4円周CB4と呼ぶことにする。第1円周CB1と第2円周CB2とが内周サンプルディスク32B―1上に設けられ、第3円周CB3と第4円周CB4とが外周サンプルディスク32B―2上に設けられている。
【0048】
各円周CB1、CB2、CB3、CB4とサンプルプローブ63Aの移動経路67とが重なるサンプラ30上の位置は、サンプル吸入位置PBに規定される。ここで、第1円周CB1上のサンプル吸入位置PBを第1吸入位置PB1、第2円周CB2上のサンプル吸入位置PBを第2吸入位置PB2、第3円周CB3上のサンプル吸入位置PBを第3吸入位置PB3、第4円周CB4上のサンプル吸入位置PBを第4吸入位置PB4と呼ぶことにする。
【0049】
第2実施例に係る安全板37Bは、4つのプローブ挿入孔38を有している。安全板37Bは、この4つのプローブ挿入孔38が第1吸入位置PB1(移動経路67と第1円周CB1との交点)と第2吸入位置PB2(移動経路67と第2円周CB2との交点)と第3吸入位置PB3(移動経路67と第3円周CB3との交点)と第4吸入位置PB4(移動経路67と第4円周CB4との交点)とにそれぞれ重なるように配置されている。
【0050】
外周サンプルディスク32B―2上には、退避エリア39Bが設けられている。内周サンプルディスク32B―1上には、退避エリア39Bが設けられていても、設けられていなくても良い。以下、説明を具体的に行うため、内周サンプルディスク32B―1上には退避エリア39Bが設けられていないものとする。
【0051】
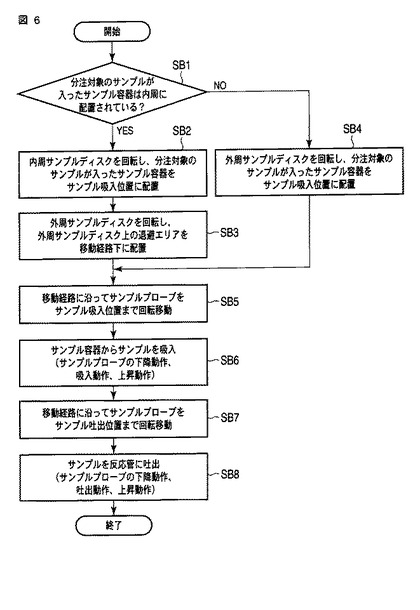
次に図6を参照しながら、サンプル系統制御部82の制御に従って行なわれる第2実施例に係るサンプルの分注動作の典型的な流れについて説明する。
【0052】
まずサンプル系統制御部82等により分注対象のサンプルが設定されると、位置検出部81は、設定された分注対象のサンプルが収容されたサンプル容器(分注対象のサンプル容器)34のサンプラ30上の位置を特定する。特定された位置のデータは、サンプル系統制御部82に供給される。
【0053】
そしてサンプル系統制御部82は、分注対象のサンプル容器34が内周サンプルディスク32B―1上に配置されているか否かを判定する(ステップSB1)。サンプル系統制御部82は、サンプル容器34の識別情報と容器挿入孔34の識別情報とを関連付けたテーブルを保持している。このテーブル上において各容器挿入孔34の識別情報は、内周サンプルディスク32B―1の識別情報又は外周サンプルディスク32B―2の識別情報に関連付けられている。このテーブルを利用してサンプル系統制御部82は、ステップSB1の判定処理を行なう。具体的には、まず、サンプル系統制御部82は、分注対象のサンプル容器34の識別情報を検索キーワードとして上記のテーブルを検索し、分注対象のサンプル容器34が挿入されている容器挿入孔33の識別情報を特定する。そしてサンプル系統制御部82は、容器挿入孔33の識別情報が内周サンプルディスク32B―1の識別情報に関連付けられているか、あるいは外周サンプルディスク32B―2に関連付けられているかを判定する。容器挿入孔33の識別情報が内周サンプルディスク32B―1の識別情報に関連付けられていると判定した場合、サンプル系統制御部82は、サンプル容器34が内周サンプルディスク32B―1上に配置されていると判定する。一方、容器挿入孔33の識別情報が外周サンプルディスク32B―2の識別情報に関連付けられていると判定した場合、サンプル系統制御部82は、サンプル容器34が内周サンプルディスク32B―1上に配置されていないと判定する。
【0054】
内周サンプルディスク32B―1上に配置されていると判定した場合(ステップSB1:YES)、サンプル系統制御部82は、分注対象のサンプル容器34のサンプラ30上の位置に従ってサンプルディスク回転制御部84に内周回転処理を行なわせる(ステップSB2)。ステップSB2においてサンプルディスク回転制御部84は、分注対象のサンプル容器34のサンプラ30上の位置とサンプル吸入位置PBのサンプラ30上の位置とに従ってサンプルディスク回転支持機構36を駆動制御する。この駆動制御を受けてサンプルディスク支持機構36は、内周サンプルディスク32B―1を回転軸RA回りに回転し、分注対象のサンプル容器34をサンプル吸入位置PBに配置する。
【0055】
ステップSB2が行なわれるとサンプル系統制御部82は、退避エリア39Bのサンプラ30上の位置に従ってサンプルディスク回転制御部84に外周回転処理を行なわせる(ステップSB3)。ステップSB3においてサンプルディスク回転制御部84は、退避エリア39Bのサンプラ30上の位置に従ってサンプルディスク支持機構36を駆動制御する。この駆動制御を受けてサンプルディスク支持機構36は、外周サンプルディスク32B―2を回転軸RA回りに回転し、外周サンプルディスク32B―2上の退避エリア39Bを移動経路67下に配置する。なお、退避エリア39Bのサンプラ30上の位置は、位置検出部81により検出される。
【0056】
一方、サンプル容器34が内周サンプルディスク32B―1上に配置されていないと判定した場合(ステップSB1:NO)、サンプル系統制御部82は、分注対象のサンプル容器34のサンプラ30上の位置に従ってサンプルディスク回転制御部84に外周回転処理を行なわせる(ステップSB4)。ステップSB4においてサンプルディスク回転制御部84は、分注対象のサンプル容器34のサンプラ30上の位置とサンプル吸入位置PBのサンプラ30上の位置とに従ってサンプルディスク回転支持機構36を駆動制御する。この駆動制御を受けてサンプルディスク支持機構36は、外周サンプルディスク32B―2を回転軸36回りに回転し、分注対象のサンプル容器34をサンプル吸入位置PBに配置する。
【0057】
ステップSB3又はSB4が行なわれるとサンプル系統制御部82は、分注対象のサンプル容器34が配置されている円周CBの位置に従ってサンプルプローブ回転制御部85に回転移動処理を行なわせる(ステップSB5)。ステップSB5においてサンプルプローブ回転制御部82は、分注対象のサンプル容器34が配置されている円周CAの位置に従ってサンプルアーム61Aの回転移動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、移動経路67に沿ってサンプルプローブ63Aを回転移動し、分注対象のサンプル容器34が配置されている円周CB上のサンプル吸入位置PBにサンプルプローブ63Aを配置する。
【0058】
ステップSB5が行なわれるとサンプル系統制御部82は、サンプルプローブ上下動制御部86とサンプルポンプ制御部87とに吸入処理を行なわせる(ステップSB6)。ステップSB6の処理は、ステップSA3の処理と同一であるので説明を省略する。
【0059】
ステップSB6が行なわれるとサンプル系統制御部82は、サンプルプローブ回転制御部85に回転移動処理を行なわせる(ステップSB7)。ステップSB7においてサンプルプローブ回転制御部85は、サンプルアーム61Aの回転移動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、移動経路67に沿ってサンプルプローブ63Aを回転移動し、反応ディスク20上のサンプル吐出位置にサンプルプローブ63Aを配置する。
【0060】
ステップSB7が行なわれるとサンプル系統制御部82は、サンプルプローブ上下動制御部85とサンプルポンプ制御部87とに吐出処理を行なわせる(ステップSB8)。ステップSB8の処理は、ステップSA6の処理と同一であるので説明を省略する。
【0061】
ステップSB8が終了するとサンプル系統制御部82は、サンプルの分注動作を終了する。なお第1実施例と同様、この後、別のサンプルについて分注をする場合、サンプル系統制御部82による制御に従って再び図6の分注動作が行われる。
【0062】
なお内周サンプルディスク32B―1に退避エリア39Bが設けられている場合、第2実施例に係る分注動作と第1実施例に係る分注動作とを組み合わせることができる。より詳細には、分注対象のサンプル容器34が内周側サンプルディスク32B―1の第1円周に配置されている場合、第1実施例と同様に、分注対象のサンプルを吸入してから、内周側サンプルディスク32B―1上の退避エリア39Bを移動経路67下に配置するとよい。これにより、サンプルプローブ63Aが第1吸入位置PB1からサンプル吐出位置へ回転移動している間にサンプルプローブ63Aから落下したサンプルが、第2円周PB2上の非分注対象のサンプル容器34に入ってしまうことを防止できる。
【0063】
本実施形態によれば以下の効果が得られる。
【0064】
本実施形態に係る自動分析装置1は、プローブ63が溶液吸入位置から溶液吐出位置へ移動している期間、プローブ63の移動経路下に退避エリアを配置させている。これにより、プローブ63の移動経路と非分注対象の容器の吸引口の移動経路とが交わらない。これによりプローブ63から溶液が落下した場合、落下した溶液が他の容器内へ進入することが無くなる。従って本実施形態に係る自動分析装置1は、プローブ63からの溶液の落下による他の溶液の汚染を防止することができる。これに伴って本実施形態に係る自動分析装置1は、測定結果の信頼性を向上することができる。
【0065】
本実施形態は、測定項目がHbA1Cの場合に顕著な効果を発揮する。測定項目がHbA1Cの場合、全血や血球等のサンプルが採血管(サンプル容器)34から吸入される。この際、サンプルプローブ63Aを採血管34の底近くまで下降させなければならない。サンプルプローブ63Aを採血管34の底近くまで下降させることにより、サンプルプローブ63Aの外壁にサンプルが付着する可能性が高くなる。そのため、測定項目がHbA1Cの場合、サンプルプローブ63Aからサンプルが飛び散ったり、ボタ落ちしたりする事態が多く発生する。しかし本実施形態によれば、サンプルプローブ63Aからサンプルが落下したとした場合でも、落下したサンプルは、退避エリア39に滴下し、他のサンプル容器34内に滴下することはない。従って本実施形態によれば、HbA1Cの測定結果の信頼性が向上する。
【0066】
かくして本実施形態によれば、測定結果の信頼性の向上を可能とする自動分析装置1を提供することが実現する。
【0067】
なお、上述の第1実施例と第2実施例とをサンプル系統を例に挙げて説明したが、上述のように、本実施形態はサンプル系統ではなく第1試薬系統にも適用可能である。第1試薬系統の場合、退避エリアは、第1試薬ディスク上の第1試薬容器の吸入口が配置されていない第1エリア、第1試薬が収容されていない第1試薬容器(空の第1試薬容器)の吸入口が占める第2エリア、あるいは特定の第1試薬が収容された第1試薬容器の吸入口が占める第3エリアである。特定の第1試薬は、分注対象の第1試薬と同種、且つ分注対象の第1試薬と同一の製造番号(ロットナンバー(lot number))に属する第1試薬である。第1エリアは、例えば、第1試薬容器が配置されていないラックが占めるエリアや、第1試薬容器の外壁に貼付されたバーコード読み取り器の進入経路が占めるエリア等である。
【0068】
また、上記の第1実施例と第2実施例とを測定項目の測定時を例に挙げて説明したが、本実施形態は、メンテナンス時においても適用可能である。メンテナンス時において用いられるサンプルとしては、例えば、キャリブレーション用標準サンプル、精度管理用標準サンプル、測定対象のサンプル等がある。これら種々のサンプルは、メンテンス中においてサンプル容器34から反応管へ分注される。従ってメンテンス時に本実施形態を適用することにより、本実施形態に係る自動分析装置1は、これら種々のサンプルのサンプルプローブからの落下による他のサンプルの汚染を防止することが可能である。
【0069】
また、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【産業上の利用可能性】
【0070】
以上本発明によれば、測定結果の信頼性の向上を可能とする自動分析装置を提供することを実現することができる。
【符号の説明】
【0071】
1…自動分析装置、10…ステージ、20…反応ディスク、22…反応管、30…サンプラ、32…サンプルディスク、32A…サンプルディスク、33…容器挿入孔、34…サンプル容器、36…サンプルディスク支持機構、37A…安全板、39A…退避エリア、40…第1試薬庫、50…第2試薬庫、52…第2試薬ディスク、54…第2試薬容器、56…第2試薬ディスク支持機構、61A…サンプルアーム、63A…サンプルプローブ、65A…サンプルアームの回転軸、61B…第1試薬アーム、63B…第1試薬プローブ、65B…第1試薬アームの回転軸、61C…第1試薬アーム、63C…第1試薬プローブ、65C…第1試薬アームの回転軸、70…撹拌部、CA1…内周、CA2…外周、PA1…内側吸入位置、PA2…外側吸入位置
【技術分野】
【0001】
本発明は、サンプルに含まれる成分の濃度や活性値等を試薬との化学反応を利用して光学的又は電気的に測定する自動分析装置に関する。
【背景技術】
【0002】
血清や尿等のサンプルが収容されるサンプル容器は、サンプルディスク上に円周状に設置されている。近年、サンプルディスクに設置されるサンプル容器の数が増加している。サンプル容器の数の増加に伴い、例えば、内周サンプルディスクと外周サンプルディスクとからなるサンプルディスクが登場している(例えば、特許文献1参照)。内周サンプルディスクと外周サンプルディスクとの各々には、円周上に複数のサンプル容器が設置されている。このように、サンプル容器は、同心円上に並べて設置されている。
【0003】
サンプルは、サンプルプローブによりサンプル容器から吸入され、移動経路に沿って回転移動され、反応ディスク内の反応管へ吐出される。移動経路下には、分注対象のサンプルが収容されたサンプル容器だけでなく、他のサンプルが収容されたサンプル容器も配置されている。サンプルプローブの汚れや振動等により、回転移動中、サンプルプローブの内壁や外壁に付着されたサンプルが他のサンプル容器に落下してしまう場合がある。この場合、落下したサンプルは、元々他のサンプル容器に収容されていたサンプルを汚染してしまい、サンプルの測定結果に悪影響を与える。このように、サンプルプローブからのサンプルの落下は、測定結果の信頼性を低下させている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平06―230016号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、測定結果の信頼性の向上を可能とする自動分析装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の第1局面に係る自動分析装置は、同心円上に配列された複数の容器を保持するディスクと、前記同心円に沿って前記ディスクを回転可能に支持するディスク支持機構と、前記複数の容器の各々から溶液を分注するプローブと、前記プローブを溶液の吸入位置と吐出位置とを結ぶ移動経路に沿って回転移動可能に支持するプローブ支持機構と、前記プローブ支持機構を制御し、前記移動経路に沿って前記プローブを前記吸入位置から前記吐出位置まで回転移動するプローブ制御部と、前記ディスク支持機構を制御し、前記ディスクを回転し、前記ディスク上に設けられ、前記プローブから落下された溶液を受けるための退避エリアを前記移動経路下に配置するディスク制御部と、を具備する。
【発明の効果】
【0007】
本発明によれば、測定結果の信頼性の向上を可能とする自動分析装置を提供することが可能となる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態に係る自動分析装置の外観を示す図。
【図2】本実施形態の第1実施例に係るサンプラをステージ上方から眺めた外観図。
【図3】第1及び第2実施例に係る自動分析装置のサンプル系統とその他の主要構成要素との機能ブロック図。
【図4】図3のサンプル系統制御部による制御に従って行なわれる第1実施例に係るサンプルの分注動作の典型的な流れを示す図。
【図5】本実施形態の第2実施例に係るサンプラをステージ上方から眺めた外観図。
【図6】図3のサンプル系統制御部による制御に従って行なわれる第2実施例に係るサンプルの分注動作の典型的な流れを示す図。
【発明を実施するための形態】
【0009】
以下、図面を参照しながら本発明の実施形態に係わる自動分析装置を説明する。
【0010】
図1は、本発明の実施形態に係る自動分析装置1の外観を示す図である。図1に示すように自動分析装置1のステージ10の略中央部には反応ディスク22が設けられている。反応ディスク20は、円周上に配列された複数の反応管22を着脱可能に保持する。反応ディスク20は、所定のサイクルで回動と停止とを繰り返す。
【0011】
反応ディスク20の近傍には、サンプラ30が配置されている。サンプラ30は、円盤状のサンプルディスク32を備える。サンプルディスク32は、同心円上に配列された複数のサンプル容器34を保持する。サンプル容器34には、サンプルが収容されている。サンプルディスク32には、サンプルディスク支持機構36が取り付けられている。サンプルディスク支持機構36は、サンプルディスクを回転方向に沿って回転可能に支持する。回転方向は、サンプルディスク32の円周方向に一致する。例えば、サンプルディスク支持機構36は、回転軸回りにサンプルディスク32を回転し、分注対象のサンプルが収容されたサンプル容器(以下、分注対象のサンプル容器と呼ぶことにする)をサンプラ30上のサンプル吸入位置に配置する。
【0012】
反応ディスク20の近傍には、第1試薬庫40が配置される。第1試薬庫40は、円盤状の第1試薬ディスクを有する。第1試薬ディスクは、同心円上に配列された複数の第1試薬容器を保持する。第1試薬容器は、サンプルに含まれる各測定項目に応じた成分と化学反応する第1試薬を収容する。第1試薬ディスクには、第1試薬ディスク支持機構が取り付けられている。第1試薬ディスク支持機構は、第1試薬ディスクを回転方向に沿って回転可能に支持する。回転方向は、第1試薬ディスクの円周方向に一致する。例えば、第1試薬ディスク支持機構は、回転軸回りに第1試薬ディスクを回転し、分注対象の第1試薬が収容された第1試薬容器を第1試薬庫40上の第1試薬吸入位置に配置する。
【0013】
反応ディスク20の内側には、第2試薬庫50が配置される。第2試薬庫50は、円盤状の第2試薬ディスク52を有する。第2試薬ディスク52は、円周上に配列された複数の第2試薬容器54を保持する。第2試薬容器54は、第1試薬に対応する第2試薬を収容する。第2試薬ディスク52には、第2試薬ディスク支持機構56が取り付けられている。第2試薬ディスク支持機構56は、回転方向に沿って第2試薬ディスク52を回転し、分注対象の第2試薬が収容された第2試薬容器54を第2試薬庫50上の第2試薬吸入位置に配置する。回転方向は、第2試薬ディスク52の円周方向に一致する。
【0014】
反応ディスク20とサンプラ30との間にはサンプルアーム61Aが配置される。サンプルアーム61Aの先端には、サンプルプローブ63Aが取り付けられている。サンプルプローブ63Aは、図示しない電動式のサンプルポンプによりサンプルを吸入したり吐出したりする。サンプルアーム61Aは、サンプルプローブ63Aをサンプラ30上のサンプル吸入位置と反応ディスク20上のサンプル吐出位置とを結ぶ移動経路に沿って回転軸65A回りに回転移動可能に支持する支持機構である。また、サンプルアーム61Aは、サンプルプローブ63Aを上下動可能に支持する支持機構でもある。
【0015】
反応ディスク20と第1試薬庫40との間には第1試薬アーム61Bが配置される。第1試薬アーム61Bの先端には第1試薬プローブ63Bが取り付けられている。第1試薬プローブ63Bは、図示しない第1試薬ポンプにより第1試薬を吸入したり吐出したりする。第1試薬アーム61Bは、第1試薬プローブ63Bを第1試薬庫40上の第1試薬吸入位置と反応ディスク20上の第1試薬吐出位置とを結ぶ移動経路に沿って回転軸65B回りに回転移動可能に支持する支持機構である。また、第1試薬アーム61Bは、第1試薬プローブ63Bを上下動可能に支持する支持機構でもある。
【0016】
反応ディスク20の外周近傍には第2試薬アーム61Cが配置される。第2試薬アーム61Cの先端には第2試薬プローブ63Cが取り付けられている。第2試薬プローブ63Cは、図示しない第2試薬ポンプにより第2試薬を吸入したり吐出したりする。第2試薬アーム61Cは、第2試薬プローブ63Cを第2試薬庫50上の第2試薬吸入位置と反応ディスク20上の第2試薬吐出位置とを結ぶ移動経路に沿って回転軸65C回りに回転移動可能に支持する支持機構である。また、第2試薬アーム61Cは、第2試薬プローブ63Cを上下動可能に支持する支持機構でもある。
【0017】
さらに、反応ディスク20の外周近傍には、撹拌部70が設けられている。撹拌部70は、図示しない撹拌子を有している。撹拌部70は、反応ディスク20上の撹拌位置に反応管22が停止されると、撹拌子で反応管22内のサンプル及び第1試薬の混合液や、サンプル、第1試薬、及び第2試薬の混合液を撹拌する。反応管22内部の混合液は、反応ディスク20の内部等に設けられた測定部による測定に供される。
【0018】
本実施形態に係る自動分析装置1は、プローブ63(サンプルプローブ63A、第1試薬プローブ63B)の溶液吸入位置(サンプル吸入位置、第1試薬吸入位置)から溶液吐出位置(サンプル吐出位置、第1試薬吐出位置)までの回転移動前又は回転移動中にディスク(サンプルディスク32、第1試薬ディスク)を回転させることにより、プローブ63から容器(サンプル容器34、第1試薬容器)へ溶液が落下することを防止する。以下にこの防止策について詳細に説明する。なお、以下に説明する本実施形態に係る防止策は、サンプル系統と第1試薬系統との何れの分注系統にも適用可能である。しかしながら、説明を具体的に行なうため、サンプル系統を例に挙げて防止策について説明する。
【0019】
また、標準的なディスクサンプラ32の構造として第1のタイプと第2のタイプとが知られている。第1のタイプのサンプラは、単一のサンプルディスクを備える。第2のタイプのサンプラは、互いに独立して回転可能な内周サンプルディスクと外周サンプルディスクとを備える。第1実施例では第1のタイプのサンプラを例に挙げて本実施形態に係る防止策について説明し、第2実施例では第2のタイプのサンプラを例に挙げて本実施形態に係る防止策について説明する。
【0020】
(第1実施例)
図2は、本実施形態の第1実施例に係るサンプラ30をステージ10の上方から眺めた外観図である。図2に示すように、サンプラ30は、円盤状のサンプルディスク32Aを搭載する。サンプルディスク32Aには、同心円上(複数の円周CA上)に配列された複数の容器保持孔33を有する。図2においては、複数の容器保持孔33は、中心(サンプルディスク32Aの円中心)を共有し、直径が異なる内周CA1と外周CA2とに配列される。各容器保持孔33には、サンプル容器34が挿入される。すなわち、内周CA1と外周CA2とは、サンプル容器34の吸引口の移動経路である。なお全ての容器保持孔33にサンプル容器34が挿入されている必要はなく、サンプル容器34が挿入されていない容器保持孔33があってもよい。また、サンプル容器34には、必ずしもサンプルが収容されていなくてもよい。
【0021】
各円周CA1、CA2とサンプルプローブ63Aの移動経路67とが重なるサンプラ30上の位置は、サンプル吸入位置PAに規定される。ここで、内周CA1上のサンプル吸入位置PAを内側吸入位置PA1、外周CA2上のサンプル吸入位置PAを外側吸入位置PA2と呼ぶことにする。分注対象のサンプル容器34が内周CA1に配置されている場合、サンプルディスク32Aが回転軸RA回りに回転することにより、分注対象のサンプル容器34は、内側吸入位置PA1に配置される。同様に、分注対象のサンプル容器34が外周CA2に配置されている場合、サンプルディスク32Aが回転軸RA回りに回転することにより、分注対象のサンプル容器34は、外側吸入位置PA2に配置される。
【0022】
サンプラ30は、安全板37Aを搭載している。安全板37Aは、サンプルディスク32Aの上方に配置される。安全板37Aは、サンプルディスク32A上の円周CAの数と同数のプローブ挿入孔38を有している。図2においては、安全板37Aは、2つのプローブ挿入孔38を有している。安全板37Aは、この2つのプローブ挿入孔38が内側吸入位置PA1(移動経路67と内周CA1との交点)と外側吸入位置PA2(移動経路67と外周CA2との交点)とにそれぞれ重なるように配置されている。安全板37Aは、オペレータによるサンプルアーム61Aやサンプルプローブ63A等への接触を防止したり、サンプルプローブ63Aからサンプルディスク32Aへのサンプルの落下を防止したりするために設けられている。
【0023】
サンプルディスク32A上には、退避エリア39Aが設けられている。退避エリア39Aは、サンプルプローブ63Aから落下したサンプルを受けるために設けられる。すなわち退避エリア39Aには、サンプルディスク32A上のエリアであって、非分注対象のサンプルが収容されたサンプル容器(以下、非分注対象のサンプル容器と呼ぶことにする)が占めるエリアは含まれない。なお分注対象のサンプルは、1サイクル毎に変更される。分注対象のサンプルが変更される毎に非分注対象のサンプルも変更される。
【0024】
退避エリア39Aには、大きく分けて2つのタイプがある。第1の退避エリア39Aは、サンプル容器34が配置されていないサンプルディスク32A上のエリアである。より具体的には、第1の退避エリア39Aは、例えば、容器挿入孔34が設けられていないサンプルディスク32A上のエリアである。この容器挿入孔34が設けられていないエリアは、このために特別に形成されても良いし、既存のサンプルディスクにおける容器挿入孔間のエリアであってもよい。また、第1の退避エリア39Aは、サンプル容器34が挿入されていない容器挿入孔33が占めるエリアであってもよい。また、第1の退避エリア39Aは、サンプル容器34の外壁に貼付されたバーコードを読み取るためのバーコード読み取り器の進入経路が占めるエリアであってもよい。第2の退避エリア39Aは、サンプルが収容されていない空のサンプル容器34の吸入口が占めるエリアである。これら退避エリア39Aの種類は、オペレータにより手動で又は操作卓を介して任意に設定可能である。
【0025】
図3は、第1実施例に係る自動分析装置1のサンプル系統とその他の主要構成要素との機能ブロック図である。図3に示すように、自動分析装置1は、サンプル位置検出部81とサンプル系統制御部82とサンプル系統83とを有している。
【0026】
位置検出部81は、分注対象のサンプル容器34のサンプラ30上での位置や退避エリア39Aのサンプラ30上での位置を検出する。検出された位置のデータは、サンプル系統制御部82に供給される。
【0027】
なおサンプラ30上におけるサンプルディスク32A上の任意位置(例えば、各サンプル容器34の位置や退避エリア39Aの位置)は、例えば、サンプルディスク32Aの回転軸RA回りの回転角度により規定されている。例えば、サンプルディスク32A上の基準位置(例えば、番号1のサンプル容器34)が移動経路67下に配置されている状態を基準角度(θ=0)とする。これによりサンプルディスク32Aの基準位置のサンプラ30上の位置は、基準角度からの回転角度により規定される。また、サンプルディスク32A上の任意位置(例えば、各サンプル容器34の位置や退避エリア39Aの位置)は、サンプルディスク32A上の基準位置からの中心点(中心軸RAとサンプルディスク32Aとの交点)回りの回転角度により規定されている。従ってサンプルディスク32A上の任意位置のサンプラ30上の位置が規定できる。
【0028】
サンプル系統制御部82は、本実施形態に特有なサンプルの分注動作を実行するために、位置検出部81からの位置のデータ等に従ってサンプル系統83を制御する。図3に示すように、サンプル系統83は、サンプルディスク回転制御部84、サンプルディスク支持機構36、サンプルプローブ回転制御部85、サンプルプローブ上下動制御部86、サンプルアーム61A、サンプルポンプ制御部87、及びサンプルポンプ68Aを有する。
【0029】
サンプルディスク回転制御部84は、サンプル系統制御部82による制御に従ってサンプルディスク支持機構36を駆動制御する。サンプルディスク支持機構36は、サンプルディスク回転制御部84による駆動制御に従ってサンプルディスク32Aを回転する。
【0030】
サンプルプローブ回転制御部85は、サンプル系統制御部82による制御に従ってサンプルアーム61Aを駆動制御する。サンプルアーム61Aは、サンプルプローブ回転制御部85による駆動制御に従ってサンプルプローブ63Aを移動軌跡に沿って回転移動させる。
【0031】
サンプルプローブ上下動制御部86は、サンプル系統制御部82による制御に従ってサンプルアーム61Aを駆動制御する。サンプルアーム61Aは、サンプルプローブ上下動制御部86による駆動制御に従ってサンプルプローブ63Aを上下動させる。
【0032】
サンプルポンプ制御部87は、サンプル系統制御部82による制御に従ってサンプルポンプ68Aを駆動制御する。サンプルポンプ68Aは、サンプルポンプ制御部87による駆動制御に従ってサンプルプローブ63Aにサンプルを吸入させたり、サンプルを吐出させたりする。
【0033】
次に図4を参照しながら、サンプル系統制御部82による制御に従って行なわれる第1実施例に係るサンプルの分注動作の典型的な流れについて説明する。
【0034】
まずサンプル系統制御部82等により分注対象のサンプルが設定されると、位置検出部81は、設定された分注対象のサンプルが収容されたサンプル容器(分注対象のサンプル容器)34のサンプラ30上の位置を特定する。特定された位置のデータは、サンプル系統制御部82に供給される。
【0035】
そしてサンプル系統制御部82は、分注対象のサンプル容器34のサンプラ30上の位置に従ってサンプルディスク回転制御部85に回転処理を行なわせる(ステップSA1)。ステップSA1においてサンプルディスク回転制御部85は、分注対象のサンプル容器34のサンプラ30上の位置とサンプル吸入位置PAのサンプラ30上の位置とに従ってサンプルディスク支持機構36を駆動制御する。この駆動制御を受けてサンプルディスク支持機構36は、サンプルディスク32Aを回転軸RA回りに回転し、分注対象のサンプル容器34をサンプル吸入位置PAに配置する。
【0036】
ステップSA1が行なわれるとサンプル系統制御部82は、分注対象のサンプル容器34が配置されている円周CAの位置に従ってサンプルプローブ回転制御部85に回転移動処理を行なわせる(ステップSA2)。ステップSA2においてサンプルプローブ回転制御部85は、分注対象のサンプル容器34が配置されている円周CAの位置に応じてサンプルアーム61Aの回転移動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、移動経路67に沿ってサンプルプローブ63Aを回転移動し、分注対象のサンプル容器34が配置されている円周CA上のサンプル吸入位置PAにサンプルプローブ63Aを配置する。例えば、分注対象のサンプル容器34が内周CA1に配置されている場合、サンプルプローブ63Aは、内側吸入位置PA1に配置され、分注対象のサンプル容器34が外周CA2に配置されている場合、サンプルプローブ63Aは、外側吸入位置PA2に配置される。
【0037】
ステップSA2が行なわれるとサンプル系統制御部82は、サンプルプローブ上下動制御部86とサンプルポンプ制御部87とに吸入処理を行なわせる(ステップSA3)。ステップSA3においてサンプルプローブ上下動制御部86は、サンプルアーム61Aの上下動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、分注対象のサンプルや測定項目に応じた下降量だけサンプルプローブ63Aを下降させる。下降が終了するとサンプルポンプ制御部87は、サンプルポンプ68Aを駆動制御する。この駆動制御を受けてサンプルポンプ68Aは、所定量のサンプルをサンプルプローブ63Aを介してサンプル容器34から吸入する。所定量は、例えば、分注対象のサンプルや測定項目に応じて設定されている。吸入が終了するとサンプルプローブ上下動制御部86は、サンプルアーム61Aの上下動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、下降量と略同一の量だけサンプルプローブ63Aを上昇させる。
【0038】
ステップSA3が行なわれるとサンプル系統制御部82は、退避エリア39Aのサンプラ30上の位置に従ってサンプルディスク回転制御部84に回転処理を行なわせる(ステップSA4)。なお退避エリア39Aのサンプラ30上の位置は、ステップSA2が終了してからステップSAが開始されるまでの間に位置検出部81により検出され、検出された位置のデータは、サンプル系統制御部82に供給されているものとする。ステップSA4においてサンプルディスク回転制御部84は、退避エリア39Aのサンプラ30上の位置とサンプル吸入位置PAのサンプラ30上の位置とに従ってサンプルディスク支持機構36を駆動制御する。この駆動制御を受けてサンプルディスク支持機構36は、サンプルディスク32Aを回転軸RA回りに回転し、サンプルディスク32A上の退避エリア39Aを移動経路67下に配置する。
【0039】
なお、図2において退避エリア39Aは一箇所に設けられている。しかしながら本実施形態は、これに限定する必要はない。例えば、退避エリア39Aは、サンプルディスク32A上に複数個所設けられていても良い。この場合、複数の退避エリア39Aのうちの特定の退避エリア39Aがオペレータにより操作卓を介して設定される。ステップSA2が終了してからステップSAが開始されるまでの間に位置検出部81は、設定された退避エリア39のサンプラ30上の位置を検出する。そしてステップS4においてサンプルディスク回転制御部34は、設定された退避エリア39を移動経路67下に配置する。
【0040】
また、内周CA1上の退避エリア39Aと外周CA2上の退避エリア39Aとがサンプルディスク32A上の同一径上に無い場合がある。この場合、サンプルディスク支持機構36は、外周CA2上の退避エリア39Aを移動経路67下に配置する。
【0041】
また、分注対象のサンプル容器34が外周CA2上に配置されている場合、サンプルプローブ63Aから他のサンプル容器34内へサンプルが落下する虞が無いので、ステップSA4は行なわれなくても良い。この場合、ステップSA3の次にステップSA5が行なわれる。
【0042】
ステップSA4が行なわれるとサンプル系統制御部82は、サンプルプローブ回転制御部85に回転移動処理を行なわせる(ステップSA5)。ステップSA5においてサンプルプローブ回転制御部85は、サンプルアーム61Aの回転移動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、移動経路67に沿ってサンプルプローブ61Aを回転移動し、反応ディスク20上のサンプル吐出位置にサンプルプローブ63Aを配置する。
【0043】
ステップSA5が行なわれるとサンプル系統制御部82は、サンプルプローブ上下動制御部86とサンプルポンプ制御部87とに吐出処理を行なわせる(ステップSA6)。ステップSA6においてサンプルプローブ上下動制御部86は、サンプルアーム61Aの上下動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、吐出のための下降量だけサンプルプローブ63Aを下降させる。下降が終了するとサンプルポンプ制御部87は、サンプルポンプ68Aを駆動制御する。この駆動制御を受けてサンプルポンプ68Aは、ステップSA3において吸入したサンプルをサンプルプローブ63Aを介して反応管22に吐出する。吐出が終了するとサンプルプローブ上下動制御部86は、サンプルアーム61Aの上下動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、下降量と略同一の量だけサンプルプローブ63Aを上昇させる。
【0044】
ステップSA6が終了するとサンプル系統制御部82は、第1実施例に係るサンプルの分注動作を終了する。この後、別のサンプルについて分注をする場合、サンプル系統制御部82による制御に従って再び図4の分注動作が行われる。
【0045】
(第2実施例)
次に本実施形態の第2実施例について説明する。なお以下の説明において、第1実施例と略同一の機能を有する構成要素については、同一符号を付し、必要な場合にのみ重複説明する。
【0046】
図5は、本実施形態の第2実施例に係るサンプラ30をステージ10の上方から眺めた外観図である。図5に示すように、第2実施例に係るサンプラ30は、内周サンプルディスク32B―1と外周サンプルディスク32B―2とを搭載する。内周サンプルディスク32B―1と外周サンプルディスク32B―2とは、互いに独立して回転可能にサンプルディスク支持機構36により支持されている。
【0047】
各サンプルディスク32B―1、32B―2には、同心円上(複数の円周上)に配列された複数の容器保持孔33を有する。図5において複数のサンプル容器33は、中心を共有し直径が異なる4つの円周CB1、CB2、CB3、CB4上に配列される。ここで、4つの円周CB1、CB2、CB3、CB4を内側から順番に第1円周CB1、第2円周CB2、第3円周CB3、第4円周CB4と呼ぶことにする。第1円周CB1と第2円周CB2とが内周サンプルディスク32B―1上に設けられ、第3円周CB3と第4円周CB4とが外周サンプルディスク32B―2上に設けられている。
【0048】
各円周CB1、CB2、CB3、CB4とサンプルプローブ63Aの移動経路67とが重なるサンプラ30上の位置は、サンプル吸入位置PBに規定される。ここで、第1円周CB1上のサンプル吸入位置PBを第1吸入位置PB1、第2円周CB2上のサンプル吸入位置PBを第2吸入位置PB2、第3円周CB3上のサンプル吸入位置PBを第3吸入位置PB3、第4円周CB4上のサンプル吸入位置PBを第4吸入位置PB4と呼ぶことにする。
【0049】
第2実施例に係る安全板37Bは、4つのプローブ挿入孔38を有している。安全板37Bは、この4つのプローブ挿入孔38が第1吸入位置PB1(移動経路67と第1円周CB1との交点)と第2吸入位置PB2(移動経路67と第2円周CB2との交点)と第3吸入位置PB3(移動経路67と第3円周CB3との交点)と第4吸入位置PB4(移動経路67と第4円周CB4との交点)とにそれぞれ重なるように配置されている。
【0050】
外周サンプルディスク32B―2上には、退避エリア39Bが設けられている。内周サンプルディスク32B―1上には、退避エリア39Bが設けられていても、設けられていなくても良い。以下、説明を具体的に行うため、内周サンプルディスク32B―1上には退避エリア39Bが設けられていないものとする。
【0051】
次に図6を参照しながら、サンプル系統制御部82の制御に従って行なわれる第2実施例に係るサンプルの分注動作の典型的な流れについて説明する。
【0052】
まずサンプル系統制御部82等により分注対象のサンプルが設定されると、位置検出部81は、設定された分注対象のサンプルが収容されたサンプル容器(分注対象のサンプル容器)34のサンプラ30上の位置を特定する。特定された位置のデータは、サンプル系統制御部82に供給される。
【0053】
そしてサンプル系統制御部82は、分注対象のサンプル容器34が内周サンプルディスク32B―1上に配置されているか否かを判定する(ステップSB1)。サンプル系統制御部82は、サンプル容器34の識別情報と容器挿入孔34の識別情報とを関連付けたテーブルを保持している。このテーブル上において各容器挿入孔34の識別情報は、内周サンプルディスク32B―1の識別情報又は外周サンプルディスク32B―2の識別情報に関連付けられている。このテーブルを利用してサンプル系統制御部82は、ステップSB1の判定処理を行なう。具体的には、まず、サンプル系統制御部82は、分注対象のサンプル容器34の識別情報を検索キーワードとして上記のテーブルを検索し、分注対象のサンプル容器34が挿入されている容器挿入孔33の識別情報を特定する。そしてサンプル系統制御部82は、容器挿入孔33の識別情報が内周サンプルディスク32B―1の識別情報に関連付けられているか、あるいは外周サンプルディスク32B―2に関連付けられているかを判定する。容器挿入孔33の識別情報が内周サンプルディスク32B―1の識別情報に関連付けられていると判定した場合、サンプル系統制御部82は、サンプル容器34が内周サンプルディスク32B―1上に配置されていると判定する。一方、容器挿入孔33の識別情報が外周サンプルディスク32B―2の識別情報に関連付けられていると判定した場合、サンプル系統制御部82は、サンプル容器34が内周サンプルディスク32B―1上に配置されていないと判定する。
【0054】
内周サンプルディスク32B―1上に配置されていると判定した場合(ステップSB1:YES)、サンプル系統制御部82は、分注対象のサンプル容器34のサンプラ30上の位置に従ってサンプルディスク回転制御部84に内周回転処理を行なわせる(ステップSB2)。ステップSB2においてサンプルディスク回転制御部84は、分注対象のサンプル容器34のサンプラ30上の位置とサンプル吸入位置PBのサンプラ30上の位置とに従ってサンプルディスク回転支持機構36を駆動制御する。この駆動制御を受けてサンプルディスク支持機構36は、内周サンプルディスク32B―1を回転軸RA回りに回転し、分注対象のサンプル容器34をサンプル吸入位置PBに配置する。
【0055】
ステップSB2が行なわれるとサンプル系統制御部82は、退避エリア39Bのサンプラ30上の位置に従ってサンプルディスク回転制御部84に外周回転処理を行なわせる(ステップSB3)。ステップSB3においてサンプルディスク回転制御部84は、退避エリア39Bのサンプラ30上の位置に従ってサンプルディスク支持機構36を駆動制御する。この駆動制御を受けてサンプルディスク支持機構36は、外周サンプルディスク32B―2を回転軸RA回りに回転し、外周サンプルディスク32B―2上の退避エリア39Bを移動経路67下に配置する。なお、退避エリア39Bのサンプラ30上の位置は、位置検出部81により検出される。
【0056】
一方、サンプル容器34が内周サンプルディスク32B―1上に配置されていないと判定した場合(ステップSB1:NO)、サンプル系統制御部82は、分注対象のサンプル容器34のサンプラ30上の位置に従ってサンプルディスク回転制御部84に外周回転処理を行なわせる(ステップSB4)。ステップSB4においてサンプルディスク回転制御部84は、分注対象のサンプル容器34のサンプラ30上の位置とサンプル吸入位置PBのサンプラ30上の位置とに従ってサンプルディスク回転支持機構36を駆動制御する。この駆動制御を受けてサンプルディスク支持機構36は、外周サンプルディスク32B―2を回転軸36回りに回転し、分注対象のサンプル容器34をサンプル吸入位置PBに配置する。
【0057】
ステップSB3又はSB4が行なわれるとサンプル系統制御部82は、分注対象のサンプル容器34が配置されている円周CBの位置に従ってサンプルプローブ回転制御部85に回転移動処理を行なわせる(ステップSB5)。ステップSB5においてサンプルプローブ回転制御部82は、分注対象のサンプル容器34が配置されている円周CAの位置に従ってサンプルアーム61Aの回転移動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、移動経路67に沿ってサンプルプローブ63Aを回転移動し、分注対象のサンプル容器34が配置されている円周CB上のサンプル吸入位置PBにサンプルプローブ63Aを配置する。
【0058】
ステップSB5が行なわれるとサンプル系統制御部82は、サンプルプローブ上下動制御部86とサンプルポンプ制御部87とに吸入処理を行なわせる(ステップSB6)。ステップSB6の処理は、ステップSA3の処理と同一であるので説明を省略する。
【0059】
ステップSB6が行なわれるとサンプル系統制御部82は、サンプルプローブ回転制御部85に回転移動処理を行なわせる(ステップSB7)。ステップSB7においてサンプルプローブ回転制御部85は、サンプルアーム61Aの回転移動機構を駆動制御する。この駆動制御を受けてサンプルアーム61Aは、移動経路67に沿ってサンプルプローブ63Aを回転移動し、反応ディスク20上のサンプル吐出位置にサンプルプローブ63Aを配置する。
【0060】
ステップSB7が行なわれるとサンプル系統制御部82は、サンプルプローブ上下動制御部85とサンプルポンプ制御部87とに吐出処理を行なわせる(ステップSB8)。ステップSB8の処理は、ステップSA6の処理と同一であるので説明を省略する。
【0061】
ステップSB8が終了するとサンプル系統制御部82は、サンプルの分注動作を終了する。なお第1実施例と同様、この後、別のサンプルについて分注をする場合、サンプル系統制御部82による制御に従って再び図6の分注動作が行われる。
【0062】
なお内周サンプルディスク32B―1に退避エリア39Bが設けられている場合、第2実施例に係る分注動作と第1実施例に係る分注動作とを組み合わせることができる。より詳細には、分注対象のサンプル容器34が内周側サンプルディスク32B―1の第1円周に配置されている場合、第1実施例と同様に、分注対象のサンプルを吸入してから、内周側サンプルディスク32B―1上の退避エリア39Bを移動経路67下に配置するとよい。これにより、サンプルプローブ63Aが第1吸入位置PB1からサンプル吐出位置へ回転移動している間にサンプルプローブ63Aから落下したサンプルが、第2円周PB2上の非分注対象のサンプル容器34に入ってしまうことを防止できる。
【0063】
本実施形態によれば以下の効果が得られる。
【0064】
本実施形態に係る自動分析装置1は、プローブ63が溶液吸入位置から溶液吐出位置へ移動している期間、プローブ63の移動経路下に退避エリアを配置させている。これにより、プローブ63の移動経路と非分注対象の容器の吸引口の移動経路とが交わらない。これによりプローブ63から溶液が落下した場合、落下した溶液が他の容器内へ進入することが無くなる。従って本実施形態に係る自動分析装置1は、プローブ63からの溶液の落下による他の溶液の汚染を防止することができる。これに伴って本実施形態に係る自動分析装置1は、測定結果の信頼性を向上することができる。
【0065】
本実施形態は、測定項目がHbA1Cの場合に顕著な効果を発揮する。測定項目がHbA1Cの場合、全血や血球等のサンプルが採血管(サンプル容器)34から吸入される。この際、サンプルプローブ63Aを採血管34の底近くまで下降させなければならない。サンプルプローブ63Aを採血管34の底近くまで下降させることにより、サンプルプローブ63Aの外壁にサンプルが付着する可能性が高くなる。そのため、測定項目がHbA1Cの場合、サンプルプローブ63Aからサンプルが飛び散ったり、ボタ落ちしたりする事態が多く発生する。しかし本実施形態によれば、サンプルプローブ63Aからサンプルが落下したとした場合でも、落下したサンプルは、退避エリア39に滴下し、他のサンプル容器34内に滴下することはない。従って本実施形態によれば、HbA1Cの測定結果の信頼性が向上する。
【0066】
かくして本実施形態によれば、測定結果の信頼性の向上を可能とする自動分析装置1を提供することが実現する。
【0067】
なお、上述の第1実施例と第2実施例とをサンプル系統を例に挙げて説明したが、上述のように、本実施形態はサンプル系統ではなく第1試薬系統にも適用可能である。第1試薬系統の場合、退避エリアは、第1試薬ディスク上の第1試薬容器の吸入口が配置されていない第1エリア、第1試薬が収容されていない第1試薬容器(空の第1試薬容器)の吸入口が占める第2エリア、あるいは特定の第1試薬が収容された第1試薬容器の吸入口が占める第3エリアである。特定の第1試薬は、分注対象の第1試薬と同種、且つ分注対象の第1試薬と同一の製造番号(ロットナンバー(lot number))に属する第1試薬である。第1エリアは、例えば、第1試薬容器が配置されていないラックが占めるエリアや、第1試薬容器の外壁に貼付されたバーコード読み取り器の進入経路が占めるエリア等である。
【0068】
また、上記の第1実施例と第2実施例とを測定項目の測定時を例に挙げて説明したが、本実施形態は、メンテナンス時においても適用可能である。メンテナンス時において用いられるサンプルとしては、例えば、キャリブレーション用標準サンプル、精度管理用標準サンプル、測定対象のサンプル等がある。これら種々のサンプルは、メンテンス中においてサンプル容器34から反応管へ分注される。従ってメンテンス時に本実施形態を適用することにより、本実施形態に係る自動分析装置1は、これら種々のサンプルのサンプルプローブからの落下による他のサンプルの汚染を防止することが可能である。
【0069】
また、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【産業上の利用可能性】
【0070】
以上本発明によれば、測定結果の信頼性の向上を可能とする自動分析装置を提供することを実現することができる。
【符号の説明】
【0071】
1…自動分析装置、10…ステージ、20…反応ディスク、22…反応管、30…サンプラ、32…サンプルディスク、32A…サンプルディスク、33…容器挿入孔、34…サンプル容器、36…サンプルディスク支持機構、37A…安全板、39A…退避エリア、40…第1試薬庫、50…第2試薬庫、52…第2試薬ディスク、54…第2試薬容器、56…第2試薬ディスク支持機構、61A…サンプルアーム、63A…サンプルプローブ、65A…サンプルアームの回転軸、61B…第1試薬アーム、63B…第1試薬プローブ、65B…第1試薬アームの回転軸、61C…第1試薬アーム、63C…第1試薬プローブ、65C…第1試薬アームの回転軸、70…撹拌部、CA1…内周、CA2…外周、PA1…内側吸入位置、PA2…外側吸入位置
【特許請求の範囲】
【請求項1】
同心円上に配列された複数の容器を保持する円盤状のディスクと、
前記ディスクを回転可能に支持するディスク支持機構と、
前記複数の容器の各々から溶液を分注するプローブと、
前記プローブを溶液の吸入位置と吐出位置とを結ぶ移動経路に沿って回転移動可能に支持するプローブ支持機構と、
前記プローブ支持機構を制御し、前記移動経路に沿って前記プローブを前記吸入位置から前記吐出位置まで回転移動するプローブ制御部と、
前記ディスク支持機構を制御し、前記ディスクを回転し、前記ディスク上に設けられ、前記プローブから落下された溶液を受けるための退避エリアを前記移動経路下に配置するディスク制御部と、
を具備する自動分析装置。
【請求項2】
前記溶液は、試薬と反応させるサンプルである、
請求項1記載の自動分析装置。
【請求項3】
前記退避エリアは、前記複数の容器の各々に付されたバーコードを読み取るバーコード読み取り器の進入経路が占めるエリア、前記サンプルが収容されていない容器が占めるエリア、又は前記複数の容器が配置されていないエリアである、請求項2記載の自動分析装置。
【請求項4】
前記溶液は、サンプルと反応させる試薬である、
請求項1記載の自動分析装置。
【請求項5】
前記退避エリアは、前記複数の容器の各々に付されたバーコードを読み取るバーコード読み取り器の進入経路が占めるエリア、前記試薬が収容されていない容器が占めるエリア、前記複数の容器が配置されていないエリア、又は分注対象の試薬と同一の生産単位に属する試薬が収容された容器が占めるエリアである、請求項4記載の自動分析装置。
【請求項6】
前記退避エリアは、前記ディスク上のエリアであって、非分注対象の溶液が収容されている容器が占めるエリア以外のエリアである、請求項1記載の自動分析装置。
【請求項1】
同心円上に配列された複数の容器を保持する円盤状のディスクと、
前記ディスクを回転可能に支持するディスク支持機構と、
前記複数の容器の各々から溶液を分注するプローブと、
前記プローブを溶液の吸入位置と吐出位置とを結ぶ移動経路に沿って回転移動可能に支持するプローブ支持機構と、
前記プローブ支持機構を制御し、前記移動経路に沿って前記プローブを前記吸入位置から前記吐出位置まで回転移動するプローブ制御部と、
前記ディスク支持機構を制御し、前記ディスクを回転し、前記ディスク上に設けられ、前記プローブから落下された溶液を受けるための退避エリアを前記移動経路下に配置するディスク制御部と、
を具備する自動分析装置。
【請求項2】
前記溶液は、試薬と反応させるサンプルである、
請求項1記載の自動分析装置。
【請求項3】
前記退避エリアは、前記複数の容器の各々に付されたバーコードを読み取るバーコード読み取り器の進入経路が占めるエリア、前記サンプルが収容されていない容器が占めるエリア、又は前記複数の容器が配置されていないエリアである、請求項2記載の自動分析装置。
【請求項4】
前記溶液は、サンプルと反応させる試薬である、
請求項1記載の自動分析装置。
【請求項5】
前記退避エリアは、前記複数の容器の各々に付されたバーコードを読み取るバーコード読み取り器の進入経路が占めるエリア、前記試薬が収容されていない容器が占めるエリア、前記複数の容器が配置されていないエリア、又は分注対象の試薬と同一の生産単位に属する試薬が収容された容器が占めるエリアである、請求項4記載の自動分析装置。
【請求項6】
前記退避エリアは、前記ディスク上のエリアであって、非分注対象の溶液が収容されている容器が占めるエリア以外のエリアである、請求項1記載の自動分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−209204(P2011−209204A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−78910(P2010−78910)
【出願日】平成22年3月30日(2010.3.30)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月30日(2010.3.30)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]